sist electrotec potencia ocr.pdf
TRANSCRIPT

/. ~. .ectr .. ca e·yc·tr e·

COMITÉ DE REDACCIÓN DE LA COLECCIÓNELECTRICIDAD-ELECTRÓNICA
ASESORES TÉCNICOS
Directora Editorial: M" Teresa GÓme;.-Mascaraque Pére;.Directora de Producción: Susana Pawin Sánche;..Editoras de Producción: COllsuelo García AS('llsio
Mónica Elvim Sall CristóbalDiseño de la Colección: MOlltl'texto, S.L.Diseño de Cubierta: Mont.\'lexto, S.L.
José Manuel Alonso CarcÍa del BustoIngeniero Superior de Telecomunicación.Respollsable de Control de Infol"lllClti\'Osde TVE.Presidellte de ACTA.
Fernando Blanco FloresMaestro IndustriaL.Pro/esor Técnico de Equipos Electrónicos.
Florencio Jesús Cembranos NistalIngeniero Técnico de Electrónica, Regulación." Automatismos. Especialidad de InteligellciaArtificial y Rohótica.Pro/esor Técnico de Automatismos.
José Manuel Huidobro MoyaIngeniero Superior de TelecomullicaciónResponsahle de Márketing en Eric.uOI/.
David Lasso TárragaTécnico Especialista en Instalaciones y LíneasEléctricas.Director Técnico del Departamento deAplicaciones Domóticas de PL.c. Madrid.
Juan José ManzanoMaestro Industrial de Electricidad.Profe.\or Técnico de Instalaciones Eléctricas.
José Moreno CilIllgelliero Técllico Industrial de Electricidad.ProFesor Técnico de Instalaciones Electrotécnicas.
Santiago Olvera PeraltaIngelliem Técllico Industrial.Pro/esor Técnico de Equipos EleClróllicos.
Miguel Oriol YelillaIllgelliem Técnico Industrial.ProFesor Técllico de Equipos Electrónicos.
José Carlos Toledano CascaLicenciado en Ciencias Físicas.Técnico de la Dirección de Márketing deIBERDROLA.
José Otero Arias
Ingelliero Industrial.Profesor de Sistemas Electl'línicos r deTecnología.
Elías Rodríguez Díeguez
Licenciado en Ciencias de la Educacióll.Allalista de Sistemas In/iJrnl,íticos.Director de Formación de PL.c. Madrid.
José Roldán Yiloria
Maestro Industrial de Electricidad r Mecállica.Responsahle de O/Icilla Técnica - Sector delAUTomÓ\'il.
José Luis Sanz Serrano
Ingeniero Técnico Industrial de Electricidad.ProFesor de la Escuela de 11l~('IIieríaTécllicaIndustrial de Madrid.
José Carlos Toledano Casca
Licellciado ('11 Ciencias Físims.Técnico de la Dirección de Múrketing deIBERDROLA.
Jesús Trashorras Montecelos
Ingelliero Técllico de Electricidad.Catedrático de Sistemas Ele.-trónicos yAutomúticos.
Joaquín Yelasco Ballano
Ingelliero Técllico de Telecolllullicaciones.Prr!fesor de Sistemas Electronicos.
Andrés Colmena AsensioIllgeniero Técnico Industriat.Pro{esor de Sistelllas ElectrtÍnicos.

Joaquín Velasco BallanoMiguel Oriol Velilla
José Otero Arias
Sistemas de Regulación y Control Automáticos
1998
o~ © Editorial Paraninfo~CJ ITP An Intemational Thomson Publis~g companyZ Magallanes, 25; 28015 Madrid ESPANA~ Teléfono: 91 4463350 Fax: 91 4456218~ ([email protected])
© JOAQUÍN VELASCO BALLANOMIGUEL ORIOL VELILLAJOSÉ OTERO ARIAS
Para más información:
ITF1LATlNAMERlCASéneca,53Colonia Polanco11560México D.F. MéxicoTel: 525-281-2906 Fax: 525-281-2656(ewinter @mail.intemeLcom.mx)
Puerto Rico/CaribbeanNenezuelaMichael Rabell, Senior Sales Rep.268 Muñoz Rivera Ave,Suite 510, 5th FloorHato Rey, PR 00918Tel: 787 758 7580 Fax: 787 758 7573(102154.1127 @compuserve.com)
© Diseño de cubierta: Montytexto, S.L.
América del SurTel/Fax (562)5244688e-mail [email protected] CHll-ETel/Fax (541)777-0960e-mail [email protected] Aires, ARGENTINA
INTERNATIONAL THOMSON PUBLISHINGOne Main Street, 6th FloorCambridge, MA 02142Tel: 617 528 3104 Fax: 6174234325
Reservados los derechos para todos los países de lengua española. De confonnidad con lo dis-puesto en el artículo 270 del Código Penal vigente, podrán ser castigados con penas de multa yprivación de libertad quienes reprodujeren o plagiaren, en todo o en parte, una obra literaria,artística o científica fijada en cualquier tipo de soporte sin la preceptiva autorización. Ningunaparte de esta publicación, incluido el diseño de la cubierta, puede ser reproducida, almacenada otransmitida de ninguna forma, ni por ningún medio, sea éste electrónico, químico, mecánico,electro-óptico, grabación, fotocopia o cualquier otro, sin la previa autorización escrita por partede la Editorial.
Impreso en EspañaPrinted in Spain
ISBN: 84-283-2472-7
Depósito Legal: M-27.607-1998
Preimpresión: Montytexto, S.L.
Gráficas ROGAR, Polígono Industrial Alparrache - Navalcamero (Madrid)
(073/57/34)
Prólogo IX
Transductores, sensores y circuitosacondicionadores .
1.1. Introducción 21.2. Clasificación de los transductores 21.3. Características de los transductores 3
1.3.1. Rango de medida 31.3.2. Sensibilidad 31.3.3. Resolución 31.3.4. Sobrerrango 31.3.5. Error de Medida 31.3.6. Salida deseada 41.3.7. Respuesta en frecuencia 41.3.8. Respuesta temporal 41.3.9. Condiciones ambientales de trabajo 5
1.4. Tipos de transductores 51.5. Transductores de temperatura 5
1.5.1. Transductor por efecto termoeléctrico.Termopar 6
1.5.2. Transductor mediante resistencia metálica 71.5.3. Transductores mediante semiconductor 91.5.4. Transductor a cuarzo II1.5.5. Pirómetros de radiación II1.5.6. Termómetro bimetálico 121.5.7. Termómetros por dilatación de fluidos 12
1.6. Transductores de velocidad y desplazamiento " 121.6.1. Transductores de velocidad angular
analógicos . . . . . . . . . . . . . . . . . . . . . . . . . 131.6.2. Transductores de velocidad angular digitales 161.6.3. Transductores de velocidad lineal 161.6.4. Transductores de desplazamiento analógicos 171.6.5. Transductores de desplazamiento digitales 20
1.7. Transductores de fuerza o deformación 231.7.1. Resistivos. Galgas extensométricas 231.7.2. Piezoeléctricos 251.7.3. Capacitivos 26
1.8. Transductores de aceleraóón 261.9. Transductores de corriente de efecto Hall 26
© ITP-PARANINFO
1.10. El amplificador operacional .1.11. Circuitos acondicionadores con amplificadores
operacionales .1.l1.1. Amplificador inversor .1.11.2. Amplificador no inversor .1.11.3. Seguidor de tensión .1.11.4. Amplificador diferencial .1.11.5. Circuito integrador .1.11.6. Circuito diferenciador .1.11.7. Circuito proporcional-integral .1.11.8. Circuitos comparadores de tensión
1.12. Acondicionadores para transductores resistivosEjemplos resueltos .Cuestiones de autoevaluación .
El diodo de potencia, el tiristor y el GTO.Rectificación .
2.1. Introducción .2.2. El diodo de potencia .
2.2.1. Estructura básica. Características .2.2.2. Tensión de ruptura del diodo .2.2.3. Pérdidas en conducción .2.2.4. Características de conmutación .2.2.5. Tipos de diodos de potencia .
2.3. El tiristor .2.3.1. Estructura física .2.3.2. Característica tensión-corriente .2.3.3. El tiristor en estado de bloqueo (OFF) .2.3.4. El tiristor en estado de conducción (ON)2.3.5. Principio de cebado por puerta .2.3.6. Formas de cebar un tiristor .2.3.7. Características de conmutación .2.3.8. Característica de puerta .2.3.9. Importancia de di/dt y dv/dt .2.3.10. Circuitos de disparo de puerta .
2.4. Tiristores de puerta TURN-OFF (GTO's) .2.4.1. Estructura física .2.4.2. Física del apagado .2.4.3. Característica de conmutación .
2.5. Rectificación .
27
282829292931323233363846
47
4848484849495051515151515252525353545454555556

I
2.5. l. Rectificación en puente monofásico 562.5.2. Rectificación en puente trifásico 572.5.3. Rectificación trifásica totalmente controlada 58
Ejemplos resueltos 61Cuestiones de autoevaluación 6-+
Transistores POWER-MOSFET, IGBT'Sy BJT'S ..... . . . . . . . . . . . . . . . . . . . . . . . 65
3.1. Introducción 663.2. Transistores MOSFET (Metal-Óxido-Semicon-
ductor) 663.2.1. EslruclUra interna y funcionamiento
(MOSFET de pequCl'ia señal) 663.2.2. Zonas de funcionamiento del MOSFET de
acumulación de canal "N" . . . . . . . . . . . . . 673.2.3. Estructura básica de un MOSFET de potencia 683.2.-+. Características de conmutación 683.2.5. Límites de funcionamiento. Área de
operación segura 693.2.6. Estabilidad de temperatura 703.2.7. Pérdidas de potencia. Consideraciones
térm icas 70.1.2.8. Funcionamiento en paralelo de los MOSFET 71
3.3. Transistores IGBT"S 713.3.1. EstruclUra de un IGI3T de canal N.
Funcionamiento 713.3.2. Características de conmutación 72
3A. Técnicas de excitación de los MOSFET e IGST"S 733.). Reducción del pico de corriente inverso 75.1.6. Aplicaciones 76
3.6.1. Regulador reductor DC-DC (Buck) 763.6.2: Convertidor elevador DC-DC (Boost) .... 773.6.3. Regulador reductor-elevador (Buck-Boost) 783.6.-+. Regulador Cúck 793.6.5. Convertidor trifásico con MOSFET 803.6.6. Convertidor (Puente en "H") con carga
inductiva 813.7. Ellransistor bipolar de potencia (B.JT) 82
3.7.1. EstruclUra y características 823.7.2. Características de conmutación 833.7.3. Pérdidas en conducción 8-+3.7.-+. Área de operación segura 8-+3.7.5. Circuitos de disparo 853.7.6. Circuitos de protección (SNUBBERS) 85
Ejcmplos n:sueltos 88Cucstiones de autoevaluación 92
4 Regulación de velocidad para motores de c.c. 93
-+.1. Introducción 94-+.2. Principio de funcionamiento del motor de C.C. 9-+
-+.2. l. Fuerza conlraelectromotriz. Corriente dcinducido. Par motor 9-+
-+.2.2. Conexión de los motores dc c.c. 95-+.2.3. Modos de operación del motor de c.c. 95-+.2.4. Características de velocidad y de par motor 96-+.2.5. Variación de la velocidad a par constante y
a potencia constante 96
-+.3. Control analógico de sistcmas . . . . . . . . 97-+.3.1. Control de dos posiciones (Conectado/
Desconectado) 97-+.3.2. Control proporcional (P) . 97-+.3.3. Control integral (I) 98-+.3A. Control proporcional-integral (PI) 98-+.3.5. Control proporcional) derivada (PD) 99-+.3.6. Control proporcional. integrador y
derivador (PID) . . . . .. 100-+.4. Función de transferencia del motor para modelo
en pequeña señal 100-+.5. Regulador de velocidad de c.c. . . . . . . . . . 101
-+.5.1. Diagrama de bloques . . . . . . . .. 101-+.5.2. Circuito dc temporil.ación lineal 102-+.5.3. Generador de onda triangular 103-+.5.4. Circuito comparador (PWM) 10-+4.5.5. Gcnerador de impulsos (C.l. SP 6(1) 1054.5.6. Convertidor DC-DC (l3ipolar) . . . . . .. 106-+.5.7. Regulador de velocidad (PI¡ 1074.5.S. Regulador dc intensidad (Pl) 108-+.5.9. Circuito acondicionador de \elocidad .. 109-+.5.10. Circuito de protección contra sobrec(l-
rrientes . . . . . . .. 109Cuestiones de autoevaluación III
Regulación de velocidad para motores de C.A. I I 3
5.1. Introducción 11-+5.2. Principios de funcionamiento del motor de
inducción 11-+5.3. Placa de bornes de un motor asÍncrono 1155.-+. Circuito equivalente de un motor de C.A. 1165.5. Balance de potencias en el motor asÍncrono 1165.6. Variación de la veloeidad en el mntor asÍncrono liS
5.6.1. Control por variación de la tensiónestatórica . . . . . . . . . . . . . . . . . . . liS
5.6.2. Control por variación de la frecuencia liS5.7. Circuito integrado "HEF -+752VP" para el control
de motores asÍncronos. Características 1195.7.1. Funciones de entrada/salida del c.l. HEF
-+752 1205.8. Diagrama de bloques del accionamiento 1235.9. Diseíio y cálculo de los bloques constituyentes del
circuito de potencia 12-+5.9.1. Rectificador + filtro 12-+5.9.2. Resistencia de frenado (crowbar) 125
5.10. Convertidor puente trifásico .. 1265.11. Formas de onda en borne s de un motor de
inducción por P.W.M. 1285.12. Pérdidas durante la recuperación del diodo
1Il verso 1285.13. Anál isis del proceso de conmutación de los
elementos de potencia en una rama del inversor 1295.14. Diseño y cálculo del inversor trifásico con
MOSFET 1305.15. Aislamiento de la señal de control. Circuito
excitador 1305.16. Circuito de marcha-paro . . . . . . . . . . . . . .. 1315.17. Circuito de temporización lineal: Referencia de
la velocidad 132
© fTP-PARANINFO

5.18. Regulador de velocidad proporcional-integral 1335.19. Circuito de compensación de 'TR" 1335.20. Circuito generador de impulsos PWM 134
5.20.1. Señal de reloj "FCT" 1355.20.2. Señal de reloj "vcr 1355.20.3. Señales de reloj "RCT" y "OCT" 135
5.21. Amplificador de impulsos 1365.22. Encoder de Velocidad. Principio de
funcionamiento 1365.23. Tacómetro digitaJ. Visualizador 137
5.24. Circuito acondicionador de velocidad 1385.25. Protección contra sobrecorrientes 1385.26. Perfil armónico de la modulación senoidal del
ancho de pulso 1395.27. Eliminación de armónicos 140Cuestiones de autoevaluación 142
Bibliografía 143
I
© ITP-PARANINFO

•

Los transductores y sensores resultan indispensables enmuchas aplicaciones de la electrónica relacionadas con diversosaspectos de nuestro entorno, tales como la automatización deindustrias de proceso, la robótica, el ahorro energético, la medi-cina, el mundo del automóvij, etcétera.
La elección del transductor condiciona, a veces, la sensibili-dad, estabilidad y exactitud de los instrumentos de medida. Poreste motivo se ha considerado oportuno cubrir un amplio núme-ro de transductores y ofrecer, en la medida de lC\posible, algu-nos ejemplos prácticos de sus aplicaciones más comunes. Por elcontrario, se han obviado aquellos dispositivos que suelen tenerun menor uso industrial, así como aquéllos otros que se encuen-tran en proceso de desarrollo.
Por otra parte, la electrónica de potencia se encarga de la uti-lización de la electrónica de estado sólido para el control y laconversión de la potencia eléctIica. Las técnicas de conversiónrequieren de la conmutación de los dispositivos semiconducto-res de potencia, de tal forma que los circuitos electrónicos debajo nivel, que por lo general están formados por circuitos inte-grados y componentes discretos, generan las señales de disparorequeridas para el control de dichos dispositivos de potencia. Enla actualidad, tanto los circuitos integrados como los compo-nentes discretos están siendo reemplazados por los microcon-troladores.
A pesar de que un disposjtivo de potencia ideal no deberíapresentar limitaciones de conmutación (tiempo de activación ydesactivación, capacidades de manejo de corriente y de voltaje,etc.) en la realidad no sucede asÍ. El hecho de que hoy en día seestán desarrollando dispositivos de potencia de conmutaciónrápida, con límites crecientes de corriente y de voltaje, talescomo los transistores MOSFET, IOBT y MCT, hace que laelectrónica de potencia se encuentre todavía en pleno creci-miento y desarrollo.
El libro está pensado para aquellos estudiantes de Ciclos For-mativos de la nueva Formación Profesional relacionados con laElectricidad y con la Electrónica, especialmente para los quecursen los ciclos de Sistelpas de Regulación Automáticos(Módulo Profesional de Sistemas Electrotécnicos de Potencia) yde Desarrollo de Productos Electrónicos (Módulo Profesionalde Electrónica de Sistemas). También puede resultar de interéspara alumnos de Escuelas de Ingeniería que cursen esta materiay, en general, para todos aquéllos que deseen reforzar y ampliarsus conocimjentos en este campo.
© ITP-PARANlNFO
Los autores han procurado abordar los temas con cierta pro-fundidad, tanto en el aspecto teórico como en el práctico, bus-cando siempre aplicaciones que puedan resultar de interés tantoa la hora de analizadas como a la hora de llevadas a la práctica.Será conveniente, por tanto, que el lector posea una cierta baseteórica que le permita abordarlos con cierta garantía de éxito.
La presente obra está distribuida en cinco grandes temas:
• Tema 1: En él se clasifican los diferentes tipos de sensoresy transductores que más se utilizan en la actualidad, así comosus características, propiedades, principios de funcionamiento,aplicaciones, etc. También hace referencia al análisis teórico delos circuitos acondicionadores a utilizar para los transductoresestudiados. Se incluye, además, una sepe de ejemplos prácticosque ponen de manifiesto todo lo anterior.
• TemaIl: Trata sobre aquellos dispositivos que en princi-pio se emplearon en la electrónica de potencia (diodo de poten-cia, tiristor y OTO): estructura, características, pérdidas depotencia, circuitos de control, etc. Incluye, además, la rectifica-ción (controlada y no controlada) y ejemplos prácticos.
• Tema IlI: Aborda el tema de los transistores de potencia(MOSFET, IOBT y BJT): estructura, características, pérdidas depotencia, control, etc. Se completa con algunas de las aplicacio-nes más importantes en las que este tipo de dispositivos juega unpapel fundamental.
• Tema IV: Está destinado a la regulación de velocidad delos motores de corriente continua tanto en bucle abierto comocerrado. Incluye además una clasificación de los diferentes tiposde control que se pueden realizar, así como un prototipo de regu-lación basado en un circuito integrado (SP 601).
• Tema V: Está dedicado a la regulación de velocidad de losmotores de corriente alterna trifásicos Uaula de ardilla) tanto enbucle abierto como cerrado. En este caso se ha desarrollado unnuevo prototipo de regulador basado en el circuito integradoHEF 4752, que es el corazón del sistema, y sobre el cual se habasado el diseño y análisis del mismo.
Finalmente, los autores esperan que esta obra sea del agradode los lectores y encuentren en él todo lo necesario para aden-trarse y profundizar en este campo, al mjsmo tiempo que estánabiertos a cualquier sugerencia o crítica que pueda mejorar estaobra en el futuro.


~ Clasificar y describir funcionalmente los tipos de sensores y transductores utilizados enlos sistemas de medida en función de las magnitudes que se pueden medir y del campode aplicación espec((ico donde se utilizan.
~ Conocer el principiq de funcionamiento y las características físicas por las que se rigenlos sensores y transductores de acuerdo con su naturaleza, tipología y campos de apli-cación.
~ Aplicar estructuralmente y con fiabilidad todos los procesos necesarios en el diseño depequeños circuitos c n transductores.
~ Reconocer los parámetros fundamentales y necesarios de los componentes electrónicosen los manuales de características técnicas y relacionar los comp(!nentes electrónicosreales con su símbolo en el esquema.
~ Identificar los circuitos básicos de la aplicación con la función que realizan.
~ Conocer el principid de funcionamiento de los diferentes tipos de circuitos acondiciona-dores de señal y el tratamiento de las señales eléctricas que procesan.
~ Conocer aquellos circuitos acondicionadores integrados más importantes que existenactualmente en el mercado así como sus principales aplicaciones.
~ Aplicar estructuralmente y con ,fiabilidad todos los procesos necesarios en el diseño depequeíios circuitos acondicionadores de señal y relacionar los componentes electrónicosreales con su símbolo en el esquema a utilizar.
~ Identificar y Justificar las variaciones de las magnitudes características del circuitoacondicionador pro ocadas por las disfunciones introducidas.
~ En varios casos práoticos de análisis de sistemas de medida que contengan todos los ele-mentos de cadena de adquisición y tratamiento de datos aplicados a entornos realesdonde intervengan variables de distinta naturaleza:
• Calcular las magnitudes y parámetros básicos del sistema, contrastándolos con losvalores reales medidos en dicho sistema, explicando y Justificando las posibles varia-CIones.
• Realizar las pruebas y ensayos de calibración necesarios para lograr las especifica-ciones de precisión requeridas, utilizando los instrumentos adecuados.
• Distinguir las distintas condiciones de error que pueden presentarse en el proceso demedida y explicar la respuesta que el sistema ofrece ante cada una de ellas.

1
1.1. IntroducciónEn ocasiones. en cualquier proceso de control y regulación.
surge la necesidad de medir una magnitud física. química obiológica para posteriormente poder procesarla y convertirla enuna señal eléctrica (analógica o digital) fácilmente tratable.Surge así la necesidad de disponer de elementos sensores,transductorcs y transmisores, los cuales se pueden definircomo:
SE SOR: Elemento que se encuentra en contacto directocon el proceso a medir. Convierte la magnitud a medir enotra (eléctrica o no) que posteriormente el transduetor escapal de convertir en una señal susceptible de medida.Viene definido por una función que relaciona las magnitu-des de entrada y de salida. El sensor es. por tanto. un ele-mento fundamental en la adquisición de datos.
Conviene tener presente que existen sensores tales comolos "termopares" los cuales, por influencia directa de lamagnitud física a medir. generan una señal eléctrica. Eneste caso. sensor y transductor forman un mismo ele-mento.
En el caso de que la seijal que proporciona el transductor nosea eléctrica (por ejemplo. mecánica) sc le suele dar el nombrede captador. A partir de ahora se hará referencia al transductorcomo un elemento que proporciona una señal de tipo eléctrico.
Generalmente. cuando se trabaja con un transduetor o sensor.la señal proporcionada por el mismo, bien analógiea (de eOlTien-te o tensión) o digital. es muy débil. Es necesario. por tanto.intercalar entre elemento sensor ) el circuito dc medida unaetapa aeondicionadora capa/: de generar una señal (anLllógica odigital) perfectamente definida.
Lno de los elementos más importan es dentro de un circuitoLlcondicionador es. sin duda. el amplificador oper<Jcional en susdiferentes contiguraciones. Estos dispositivos manipulan seña-les eléctricas para. en esencia. realil.ar alguna de las dos tareassiguientes:
TrLltLImiento de la información.Control de potencia.
La función de estos circuitos electrónicos es trLltar las señaleseléctricas de modo que puedan exciur los correspondientesaetuadores.
En la figura 1.1 se encuentra representado el diagrama de blo-ques del sistema completo.
La magnitud proporcionada por el sensor será. asimismo.proporcional a la magnitud física que se mide, pero lo realmen-te importante es la señal eléctrica que se obtiene en la salida deltransductor.
• TRANSDUCTOR: Tiene por objeto transformar la señal.proporcionada por el sensor. en otra de tipo eléctrico cuyamedida y tratamiento resulten más fáciles. Generalmenteestas señales suelen scr muy pequeñas (dcl orden demicrovoltios y en pocos casos de milivoltios). Incluye alsensor como una parte de él.
• TRANSMISOR: Su misión es la de transformar la señalproporcionada por el transductor en otra señal normaliza-da. de tipo analógico o digital.
La señal final. proporcionada por el transmisor. debe serproporcional al fenómeno físico que se pretende medir(temperatura. velocidad. humedad. presión, ete.). Dichaproporcionalidad debe ser. en la mayoría de los casos. lomás lineal posible. Es por ello por lo que, en ocasiones.se incluye en el propio transmisor un "circuito acondi-cionador".
ACTIVOS: Aquéllos en los que por influencia directa dela magnitud física tratadLl sc generan señales eléctricasintrínsecamente en el elemento sensor. En este tipo, sensory transduetor son un único elemento que no requiere ali-mentación eléctrica exterior para la obtención de la señaly sí en ILIposterior amplificación.
PASIVOS: Aquéllos que requieren alimentación eléctricaexterior. Alguna característica eléctrica (resistencia. capa-cidad. etc,) es modificada por el tlnómeno objeto de medi-ción. haciéndose necesaria una excitación eléctrica paraobtener una señal eléctrica proporcional a la magnitudbajo prueba,
En aquellos casos en los que el sersor no proporcione unaseñal eléctrica senín necesarios dispositivos encargados degenerar señales eléctricas a partir de é ·tas. Por ejemplo. cn elcaso de transductores basados en la \ ariación de resistencia aunLl respuesta vm"ÍLlble será necesario un circuito (puente deWheatstone. divisor resistivo. etc.) que posea una alimentLlcióneléctrica pam poder obtener una señal de salida, pues la "Llria-ción de resistencia cn sí no genera señal alguna.
En otros será necesaria la lineali/ación de b respuesta (ter-mistores). ILIcompensación de pertur Llciones (galgas exten-sométricas) o una configuración que aumente la sensibilidadmediante el empleo de \'arios transduct Jres.
Atendiendo a la forma de utili/ación de la energía generadapor la magnitud física a medir. los tran,ductores se pueden cla-siticar en:
1.2. Clasificación de lostransductores
Magnitud transductible:- Resistencia
•. - Capacidad- Deformación- Fuerza, etc.
ScnsorMagnitudfísica
Figura 1.1. Diagrama de bloques (sensor+transductor).
Señal eléctricanormalizada
Transmisor Señal útil:- Eléctrica- Mecánica
Atendiendo al tipo de señal proporcionada en su salida. lostransductores se pueden clasificar en:
ANALÓGICOS: La señal de salidLl es función propor-cional a la magnitud físicLl que se trata en todo el campode Llctuación del dispositivo.
© ITP-PARANINFO

• DIGITALES: La señal de salida se presenta en forma deniveles discretos de tensión a los que se les asigna valoresnuméricos de acuerdo con un convenio preestablecido.Estas señales digitales suelen obtenerse en forma de trenesde impulsos con un código determinado. Los transducto-res digitales pueden ser absolutos e incrementales.
- Absolutos: Cuando el dato obtenido está referido a unorigen fijo.
- Incrementales: Cuando un dato tiene como referenciael anterior.
1.3. Características de lostransductores
En los sistemas de adquisición de datos, puede considerarseque el transductor es el principal elemento ya que puede consi-derarse que el sensor forma parte de él.
Generalmente, en cualquier proceso de regulación o control,el objetivo principal es obtener una señal eléctrica (analógica odigital) proporcional a la magnitud física que se desea controlar.Esta magnitud física será la que determine la utilización de unou otro tipo de transductor, el cual estará basado en un determi-nado principio físico. La selección de dicho elemento dependeráde la naturaleza de las magnitudes físicas a medir (temperatura,velocidad, posición, fuerza, deformación, humedad, etc.), deltipo de fenómeno físico a controlar (estático o dinámico) asícomo de una serie de características (tabla 1.1) que se describena continuación.
1.3.2. SensibilidadEs la razón entre una variación de la magnitud de salida y la
correspondiente variación de la magnitud de entrada que la pro-vocó, es decir, la pendiente de la característica que relaciona lasalida eléctrica con la magnitud física detectada. El cálculo de lasensibilidad del transductor de la figura 1.2 será:
S ... 10enslbIlldad =S=-=0,2mVlmm
50
SALIDA (mV) •
10
5
_ ENTRADA (mm)25 50
Figura 1.2. Sensibilidad.
1.3.3. ResoluciónEs la mínima variación detectable de la magnitud de entrada.
1.3.4. Sobrerrango
SALIDA
Se denomina también sobrecarga o medida máxima y es lamáxima magnitud de entrada que se puede aplicar al transduc-tor, modificando las características del mismo pero sin causarledaños permanentes (figura 1.3).
Característicasde los
Transductores
Operativas
Estáti as
Diná~icas
Rango de medidaSensibilidadResoluciónSobrerrango ¡OFFSET
LinealidadError de medida Histéresis
RepetibilidadPrecisión
Salida deseada
{Respuesta en frecuencia
Respuesta temporal
Posible alteraciónde las caracteristicas
100%----'--
125%-MAGNITUD
FíSICA
¡SU~'edadHu edad
Ambientales Vi . acionesRu oInt rferencias ElectromagnéticasTe peratura
1.3.1. Rango de medidaEs la diferencia entre el valor máximo y el mínimo que el ele-
mento es capaz de medir. No se ha de utilizar un transductorpara realizar medidas por debajo de la décima parte del valormáximo que es capaz de medir.
© ITP-PARANINFO
Sobrecarga
Figura 1.3. Sobrerrango.
1.3.5. Error de medidaSe define como la razón entre el error total y el rango com-
pleto de medida. Se suele expresar en tanto por ciento. El errortotal es la diferencia entre el valor leído y el valor real.
Existen errores que no son atribuibles al transductor, deno-minados sistemáticos, que son inherentes a la medida. Se pue-den producir por vibraciones, defectos en la alimentación, erro-res en la instalación, errores de calibración, etc.
Existe otro tipo de errores, los cuales dependen del compor-tamiento del transductor, tales como la no-lineaJidad, histéresis,repetibilidad, variación de la medida con la temperatura, etc.

1.3.5.4. RepetibilidadCuando en un transductor ~c realiza una misma medida
múltiples \eces. en la Illi~ma direcciún e iguales condiciones.pucde ocurrir que la seiial de ~alida del mismo sea diferente(figura 1.6).
Se define repetibilidad como la ra¡ún entre la m:lxima dife-rencia entre las lecturas de salida) el rango de medida. normal-mente expresado en tanto por ciento.
Illá\IIlla diferencia
1.3.5.1. Error de cero (OFFSET)E~ aquél que sc produce cuando la magnitud a medir cs nula
) la ~eiial proporcionada por el transductor no lo es. Sc suclee\prc~ar en porccntajc ~()bre el fondo de cscala.
E~te crror suele proJucirsc en tran~dllctores pasivos. los cua-il:~ pucden proporcionar señal dc salida en ausencia de señal aIllcdir. debido a la C\i~tencia de una fuente de excitación.
La corrccciún de este error ~e consigue mediante técnicas decOlllpcn'aciún. la~ cuales consisten en introducir en el sistemauna ~cñal de \ alm COllswntc ) ~entido contrario al error. Repetibilidad = ----------
rango de medida100
1.3.5.2. Error de linealidadNOrlnallllente la característica deltransductor no es una línea
recta. lo cual da lugar a este tipo de error.
Se ddinc error de lillealidad como la máxima desviaeiún dela curva característica con respecto a la recta que une el origen) cl fondo de eSGlia. (Figura 1.-1-). Para su correcta determina-ci(lIl la característica del transductor ha de pasar por el origen decoordenadas. e~ decir. que el OFFSET sea nulo.
Figura 1.6. Repetibilidad.
•. MAGNITUDFíSICA
,Repetibilidad•
SALIDAELÉCTRICA
1.3.5.5. Error combinado. Precisión
100m¡Í\ ima di ferencia ab~oluta
rango dc medidaError de linealidad = ------------
SALIDA AELECTRICA
1
Respuesta ideal..A
Respuesta real
AMáxima desviación,
•. MAGNITUDFíSICA
Se denomina precisiólI de un transductor al valor cuadráticomedio de los en'ores de linealidad. histé'esis y repetibilidad. Semide en tanto por ciento sobre fondo de escala.
Rango de medida
Figura 1.4. Error de linealidad.1.3.6. Salida deseada
1.3.5.3. HistéresisEn muchas ocasiones, la característica del transductor, obte-
niJa dando valorcs crecientes no coincide con la obtenida dando\'alme~ decrecientes. tal y como se puede observar en la figura1.5. denominándose histéresis a este hecho.
En función del proceso a tratar. en determinados casos sedeseará una señal de tensiún, la cual variará proporcionalmentea la magnitud de entrada a controlar. El' otros. sin embargo, senecesitará una señal de corriente o un tren de impulsos conve-nientemente codificado.
Para obtener una señal digital a partir de otra analógica oviceversa. bastará con utili;:ar un convertidor AID o D/A.
1.:1histéresis se puede cuantificar mediante la raLón entre laIllá\ima diferencia de señales medidas. en proceso crcciente ydecrccicntc. para un mismo \'alor de la magnitud de entradaentre cero) fondll de cscala y el rango de medida. Se suelee\11I"e~ar en tanto pm ciento.
máxima diferencia
La transmisión de datos ana lógicos es más delicada que la dedigitales. pues los problemas de ruidos. acoplamientos e interfe-rencias. presentes cn ambas transmisiones. son más fáciles detratar digitalmente mediantc la adecuada codificación y restau-ración de impulsos. En transmisión analógica se han de introdu-cir filtros que no son tan eficaces y que Introducen rctrasos.
rango de medida
SALIDAELÉCTRICA 1.3.7. Respuesta en frecuencia
Histéresis,..Rango de medida
Figura 1.5. Histéresis.
•. MAGNITUDFíSICA
Es aquclla característica dinámica dcl transductor que deter-mina la máxima frccuencia de la magnitud a medir quc va a sercapa¡ de soportar.
1.3.8. Respuesta temporalResulta de interés especificar la respucsta del transductor a un
escalún de la magnitud de entrada quc es de la forma indicada
© /TP-PARANlNFO

¡EXCITACiÓN
1.3.9. Condiciones ambientalesde trabajo
ESCALAS DE MEDIDA DE TEMPERATURA
Congelación/ RelaciónEscala Ebullición del Unidades entre escalasagua
Centesimal Grados tc=(tF-32)'5/9(C) O °C - 100°C Centígrados tc=tK-273,15
o Celsius
Fahrenheit 32°F - 212°F Grados tF=9/5·te+32(F) Fahrenheit tF=9/5'(~-273, 15)+32
Absoluta 273.15 K- KelvintK=te+273,15
(K) 373,15 K tK=5/9·(tF-32)+273,15
• Debe existir un buen contacto térmico entre el dispositivoy el medio a estudiar.
• En el caso de fluidos puede ser necesaria su agitación paraobtener una temperatura homogénea.
• Se deben mjnimizar las pérdidas por conducción y aislartérmicamente el sensor y el e.'(terior.
Las principales escalas de medida de temperatura se encuen-tran representadas en la tabla 1.2, donde se indica también larelación entre ellas.
• El medio en el que se realiza la medida no ha de ser per-turbado.
da se realizará mediante instrumentos ópticos y en el primeromediante dispositivos que posean propiedades sensibles a latemperatura.
En el caso de los transductores en los que exista contacto sedeberán tener en cuenta las siguientes normas para un correctofuncionamiento del sistema:
---------------------TIEMPO (1)
Is
Figura 1.7. Respuesta temporal.
¡RESPUESTA
J'----------r----------.-TIEMPO (1)
en la figura 1.7 sobre la cual se podrán definir los siguientesparámetros de interés.
• tr = Tiempo de subida.• ts = Tiempo de asentamiento.• ta = Tiempo de adquisición.
Usualmente estos tiempos son definidos respecto a determi-nados porcentajes del valor final. Es importante advertir que laforma de especificar estos tiempos e incluso sus mismas defini-ciones pueden ser distintas para diferentes fabricantes.
En los ambientes industriales existen determinados factores,tales como suciedad, humedad, vibraciones, ruido, interferen-cias electromagnéticas, temperatura, etc., que pueden producirun funcionamiento incorrecto del transductor, por lo que habránde tenerse en cuenta en el momento de seleccionarlo.
1.4. Ti os de transductores
En la tabla 1.3 se indican diferentes tipos de transductoresde temperatura clasificados por el principio físico que utili-zan, de los cuales algunos de ellos serán desarrollados másampliamente.
TIPOS DE TRANSOUCTORES DE TEMPERATURA
En función de la magnitud física a medir y teniendo en cuen-ta su importancia, grado de utilización y aplicaciones de los mis-mos, se tratarán, principalmente, los siguientes transductores:
• De temperatura.• De velocidad.• De posición o despwzamiento.• De fuerza o deformación.• De aceleración.• De corriente (efecto Hall).
1.5. Transductores de tem eraturaLa medida de la temperatura en cualquier medio físico es el
objeto de estos transductores.
En función del tipo empleado puede existir o no contactofísico con el medio a estudiar. En el segundo supuesto la medio
© ITP-PARANlNFO
Principio Tipo Denominaciónfisico
Acoplamiento Termopartermoeléctrico Sonda pirométrica
Resistencia metálica Sonda termométrica
Eléctrico Termistor
Semiconductor DiodoTransistorCircuito integrado
Cuarzo De cuarzo
Por radiación total
Ópticos Por radiación parcial Pirómetros de radiación
Bicromáticos
Dilatación de sólidos Termómetro bimetálico. etc.Mecánicos Dilatación de fluidos Termómetro de mercurio, etc.
Termomanómetro

En la tabla lA se puede observar el rango aproximado demedida de los di ferentes transduetores de temperatura.
sean mínimas. y mantener conslante la temperatura T2, denomi-nada de referencia.
\
\
Aparato demedida
Tref=T2Metal C
Metal CConexión fria(Isotérmicai
Cable decompensación
Tref=T2Metal A Metal C
Metal B Metal CConexión fría(Isotérmica)
Figura 1.9. Medida de Le.m. en un termopar.
<---
Tl = Tm Metal A :(Unión < _medida) Metal B
T1 = Tm
(Uniónmedida)
Cuando el circuito de control cstá alejado del punto de medi-da de temperatura (figura 1.10) se dehe emplear un cable decompensación que evite que las propiedades del termopar semodifiquen.
-270 a 1820
-260 a 1400
-100 a 450
-50 a 150
-50 a 150
-100 a 250
300 a 3000
-200 a 500
-55 a 600
-100 a 600
O a 400
Rango de medida (OC)
Tabla 1.4.
Tipo de transductor
Dilatación de líquido
Dilatación de gas
Dilatación de vapor
Pirómetro de radiación
Circuito integrado
Cuarzo
Termistor
Termopar
Resistencia Metálica
Termómetro bimetálico
Transistor
Generalmente el fabricante ofrece la sensibilidad del elemen-to tomando como referencia la temperatura de congelación delagua (O °C). El procedimiento para mantener la unión fría a O °C(tigura 1.11) se realiza mediante el baño de la misma en hielo.lo cual resulta fácil de construir pero difícil de mantener.
La técnica que normalmente se utiliza es la de compensa-ción, consistente en sumar a la señal generada por el termoparuna tensión proporcional a la temperatura de la unión fría (Iigu-ra 1.12), de tal forma que la suma de ambas sea la que propor-cionase el termopar con la unión fría a O 0c.
Se debe tener en cuenta que la tensión proporcionada por eltermopar es de la forma: V, = E (TI - 7'2)' donde E es el gradien-te de tensión proporcionado por el fabncante. referido a O °C y1'" 1'2 las temperaturas de las uniones.
Figura 1.10. Utilización de cable d(~compensación.
\
o Vo=A.E.Tl
Metal C
Metal C
Baño de hieloTref = O °CP=lalm.
Metal A
Amplificador
~~V=E(Tl-T2)tE.T2 ~
Metal A
Vc=E.T2
Vt=EIT1-T2)
Figura 1.11. Termopar con unión fría a O0c.
Metal B
SENSOR
I COMPENSACiÓN I
Tl = Tm
(Uniónmedida)
METAL A
METAL B
Figura 1.8. Efecto Peltier y Thomson.
Un termopar está constituido por la unión de dos metales dedistinta naturaleza. La unión se realiza por soldadura en unextremo (temperatura a medir) y por contacto en el otro.
Su funcionamiento se basa en el efecto Seebeck, el cualdepende de otros dos efectos: el Peltier y el Thomson.
Efecto Peltier: En la unión de dos metales de distintanaturaleza se crea una direrencia de potencial denominadapotencial de contacto. de forma que al circular unacorriente eléctrica de uno a otro se produce una absorcióno cesión de calor. en función del sentido de la corriente. demanera que la temperatura alcanzada no corresponde a laprevista según efecto Joule.
t-jecto Thomson: Si un metal posee dos zonas a diferen-tes temperaturas entre éstas se origina una diferencia depotencial.
Si dos metales de di ferente naturaleza se unen forman un cir-cuito cerrado (figura 1.8). presentarán a su vez el efecto Peltiery el efecto Thomson. Por esta razón, a lo largo del circuito exis-tirá una diferencia de potencial y. por tanto, existirá una intensi-dad de corriente de naturaleza termoeléctrica.
1.5.1. Transductor por efectotermoeléctnco. Termopar
Si se abre el circuito por una de las dos uniones (figura 1.9)es posible. mediante el adecuado aparato de medida, obtener lafuerza electromotriz generada en el tennopar, teniendo en cuen-ta que será necesario conectar un nuevo metal C, cuyas pérdidas
Figura 1.12. Compensación de termopar (diagrama de bloques).
Los termopares utilizados en la industria para la medida,principalmente. de altas temperaturas se clasifican en función de
© ITP-PARANINFO

donde:
los dos metales constituyentes de los mismos, tal y como semuestra en la tabla 1.5.
Hierro / Constantan 55 J
Cromo / Constantan 78 E
Cromo / Aluminio - 70 a 1370 41 K
Platino-Radio 10% / Platino .50 a 1760 10,5 S
Platino-Radio 13% / Platino -SOa 1760 12 R
Platino-Radio 30% /Platino-Radio 6% O a 1820 7 B
l: 1.5.
En la figura 1.13 se observa la variación de la f.e.m. en fun-ción de la temperatura para cada uno de los tipos de termopares.
• R¡ es la resistencia eléctrica del conductor a unatemperatura "t".
• Ro es la resistencia eléctrica del conductor a O0e.a es el coeficiente de temperatura de la resistencia.
Si la dependencia no es lineal, la relación resistencia-tempe-ratura tiene por ecuación:
R t = R" ( I + a 1 t + a2 t 2 + ... + a" t " )
donde al ' al' ... an son coeficientes que dependen del mate-rial con el que esté construido el sensor.
Los materiales a emplear en la construcción del dispositivohan de reunir una serie de características, entre las que seencuentran:
• Coeficiente de temperatura elevado.
• Resistividad elevada.
• Ductilidad para facilitar el proceso de fabricación delresistor.
t.e.m. (mV) 80
70605040302010
o 200 400 600 800 1000 1200 1400 1600 t/°C)
• Estabilidad de características con el tiempo.
De las dos primeras dependerá la sensibilidad del transductor,de la tercera el tamaño y rapidez de respuesta y de la última elque se comporte prácticamente igual durante su vida útil.
Platino, cobre y níquel son los materiales que poseen las ante-riores características, cuya variación relativa de resistencia conla temperatura se indica en la figura 1.14.
Rt/Ro a (O 0e¡ •
8
Figura 1.14. Variación relativa de resistencia con la temperatura.
Figura 1.13. Variación de la f.e.m. en diferentes termopares.
1.5.2. Transdudor medianteresistencia metálica
Su principio de funcionarnjento está basado en la variaciónque experimenta la resistividad de un conductor y, por tanto, laresistencia en función de la te\Tlperatura ya que:
6"
4
2
o+-----t
200 400 600 800
Los dispositivos fabricados bajo este principio, generalmen-te, consisten en un arrollamiento del hilo conductor protegido yaislado adecuadamente. Una importante característica del mate-rial empleado es el denominado coeficiente de temperatura, elcual representa la variación de la resistencia del conductor enfunción de la temperatura.
Suponiendo una dependencia lineal de la resistencia con latemperatura, la relación entre ambas es de la forma:
donde:
LR=p'-
S
• R es la resistencia eléctrica del conductor.• p es la resistividad del material empleado.•L es la longitud del conductor.• S es la sección del mismo.
En la tabla 1.6 se indican algunas características de las son-das de resistencia metálica fabricadas con estos materiales.
. ·.IR. el"""." c,•••Mte l~ de PreciIi6n•••••• ~ .~ ~ oc~ ----- - -- --~
Cobre 1,56 0,00425 -200 a 120
6,38 0,0063 a 0,0066 -150 a 300
9,83 0,00385
Ti 1.
El cobre presenta una variación de resistencia con la tempe-ratura prácticamente lineal, es barato y estable, pero tiene baja
© ITP-PARANINFO

re~i~tividad y su rango de utilización se ha de limitar por pro-blemas de oxidación.
El níquel posee mayor resistividad y elevado coeficiente detemperatura pero éste varía en función del proceso de fabrica-ción y su respuesta no es lineal con la temperatura. Práctica-mente no se usa.
El platino es el material idóneo por su estabilidad y preci-~ión. ~iendo el principal inconveniente su coste.
Este montaje se emplea, por tanto. con resistencias relativa-mente baja~ de lo~ hilos de conexión y cuando el valor medidono necesita gran exactitud.
El montaje más utilizado es el de conexión mediante treshilos (figura 1.16). En él, la resistencia PT 100 está conectada alpuente a través de tres hilos conductores.
\
1
La resistencia de platino con una resistencia de 100 Q aO °C y 138.5 n a 100°C. denominada PT I00, es la que se~uele utilizar en la industria. En ella, a efectos prácticos, sepuede considerar que la respuesta es prácticamente lineal.Para realizar su función como sensor de temperatura, necesi-ta ser alimentada con una corriente de muy bajo valor ya quesi su disipación térmica por efecto Joule es apreciable, darálugar a un error en la medida debido al autocalentamiento.
La medida de temperatura con este tipo de sensores, nor-malmente se realiza mediante puentes de Wheatstone, enmontajes denominados de dos, tres o cuatro hilos, siendo lare~i~tencia dependiente de la temperatura una de sus ramas.
•
•
El montaje de dos hi los (figura 1.15) resulta ser el más sen-cillo, pero presenta el inconveniente de que la resistencia delo~ hilos de conexión de la PTIOO al puente (R" y Rh) varíacon la temperatura. cometiéndose un error en la medida. aun-que e~to~ hilos ~ean de baja resistencia
R(PT100)
Figura 1.16. Montaje de tres hilos.
Aparato de medida
Del análisis. se desprende que para el equilibrio del puente seha de cumplir:
\
•R,' (R + R )
- 1 " RR /'
J
Figura 1.15. Puente de Wheatstone (montaje de dos hilos).
-=- V•
R~
•a
•
•b
•
~R(PT100l
El circuito se diseñará de modo que R 1 = R 2 • por lo que enestas circunstancias el valor óhmico de la PT I00 será:
RI''fI(X) R, t R" R¡,
con lo cual la medida no estará innuida por la longitud de losconductores ni la temperatura si R" = R,.
El montaje de cuatro hilos (figura 1 17) se emplea para unamayor precisión de la medida. Consiste en efectuar dos medi-das de la resistencia de la PT I00 combinando las conexione~.de modo que la ~onda esté primero en un brazo del puente yluego en otro. El valor de la re~islencia será la media de la~do~ medidas.
Si se tienen en cuenta las resistencias de conexlon de laPT l00, las ecuaciones quedan modificadas de la forma:
Para con~eguir el equilibrio del puente se modifica el valorde R3 ha~ta que la lectura del aparato de medida (galva-nómetro) sea cero. momento en el que se cumple la relaciónR1 • RI'TlOO = R2 . R, . donde se han supuesto nulas Ra y Rh•
El valor de la resistencia de la PT 100 será:
\
Figura 1.17. Montaje de cuatro hilos.
\
R~ ~2 R~ ~2
-=- V -=V
R3De
R4DT
e1 • e • • •
T · c::J e . c::JR(PT100) R(PT100)
© ITP-PARANlNFO

1.5.3. Transdudor mediantesemicondudor
Basan su funcionamiento en la variación de resistencia queun semiconductor experimenta con la temperatura.
Los diferentes tipos de sensores que utilizan este principio defuncionamiento pueden ser:
• Termistores.• Diodos.• Transistores.• Circuitos integrados.
1.5.3.1. Termistores
Están constituidos por semiconductores electrónicos depequeño tamaño con un coeficiente de temperatura elevado, porlo que presentarán una alta sensibilidad y tiempo de respuestarelativamente bajo.
Cuando se utilizan para la medida de temperatura, debe man-tenerse una corriente muy baja a través de ellos (típicamentemenores de IOOIlA)para conseguir que la disipación de poten-cia sea despreciable y, por tanto, su autocalentamiento por efec-to Joule.
Para obtener una aceptable estabilidad en los termistores sehace necesario su adecuado envejecimiento.
Normalmente estarán montados, al igual que las resistenciasmetálicas, sobre un puente de Wheatstone, siendo éstos una desus ramas.
En determinadas ocasiones será necesario, mediante procedi-mientos adecuados, lineal izar la característica resistencia-tem-peratura del termistor.
En cuanto a la distancia entre el termistor y el instrumento demedida, puede ser elevada siel\lpre y cuando la resistencia de loshilos de conexión del termistor al puente sea despreciable fren-te a la suya propia.
Su uso no está limitado a la medida de temperatura sino quepueden emplearse también para otras funciones electrónicascomo interrupción, medida de nivel de líquidos, etc.
Los más conocidos son los NTC (coeficiente de temperaturanegativo) y los PTC (coeficiente de temperatura positivo).
1.5.3.1.1. Termistores NTC
donde: • R, es la resistencia en ohmios de la temperatura abso-luta T.
• Ro es la resistencia en ohmios a la temperatura abso-luta de referencia To'
• B es una constante dentro del intervalo de utilización.
El valor de la constante B, se puede obtener a partir de lamedida de la resistencia del termistor para dos temperaturasconocidas:
Tomando logaritmos neperianos y despejando B se obtiene:
InRI-lnRzB=-----I I
En cuanto al coeficiente de temperatura de la NTC será de laforma:
( 1 1)I d Rr lIB' T T Ba=-·--=--·B·-·R·e "=--
Rr d T Rr T2 o T2
Si se expresa en tanto por ciento, será:
En la figura l.18 se puede observar la característica de dostermistores NTC junto con la de la PT 1OO.
RES(OHMI 108
t400300o
10-2·100 100 200
TEMPERATURA °C
Figura 1.18. Característica resistencia.temperatura de dos NTCy PTlOO.
Entre las aplicaciones de los termistores NTC se encuentran:
• Medida de temperatura• Compensación de temperatura• Regulación de temperatura• Estabilización de tensión• Alarmas
(1 1')B· -R=R'e 7'T;
I u
Son resistores no lineales, estructuralmente constituidos porsemiconductores con coeficiente de temperatura negativo eleva-do, del cual reciben su nombre.
El termistor del tipo perla es el más utilizado para la medidade temperatura, introduciéndolo en montajes similares a losempleados con las resistencias metálicas.
La relación entre la resistencia del termistor NTC y la tem-peratura viene dada por la expresión:
© ITP-PARANINFO

El acondicionamiento con~istirá en alimentar la PTC conuna corriente de valor constante. de forma que las variacione~de resi~tencia se COIl\ iertan en variaciones de tensión propor-cionale~ a la mi~ma.
Puesto que la variación de resistencia del termistor PTC enfunción de la temperatura no es line' 1. generalmente requie-ren un proceso de linealilación con~ ~tente en añadir al di~-positivo resistores fijos en el mismll elemento transductor(figura 1.20). obteniendo así elementos en forma de divisor detensión o de resistencia \ariable.
1
ProtecciónRetardo~, etc.
1.5.3.1.2. Termistores PTC
Se trata de resistores no lineales constituidos por materiales~emiconductores con coeficiente de temperatura positivo eleva-do. de donde reciben ~u nombre.
Su valor óhmico aumenta al hacerlo la temperatura y el valorabsoluto de su cocl'iciente de temperatura es, en la mayoría de...los casos. superior al de lo~ termistores NTC.
Su relación re~i~tencia-temperatura se puede observar eI1 lafigura 1.19 en la que se pueden distinguir tres zonas perfecta-mente definidas:
Zona 1, en la que el coeficiente de temperatura es ligera-mente negativo. Dicha zona está por debajo del punto crÍ-lico de tran~formación de la red clistalina.
Zona 11, en la que ~e ha producido el cambio de la redcristalina del sistema tetragonal al cúbico (se ha superadoel punto de Curie) y el coeficiente de temperatura es posi-tivo.
ZOfla 111,en la que la estructura cúbica es estable y el coe-ficiente de temperatura negativo.
o +v
o
-o
o
R(OHM) •Figura 1.20. Linealización de PTe.
T1 T2
111
~T
Entre las aplicacione~ de los tellllisrores PTC se encuentran:
Osciladores de relajación.
Estabilización de corriente.
Medida de nivel de líquidos.
Protección.
Compensación de temperatura. tic.
Figura 1.19. Característica resistencia.temperatura de PTe.
El campo de aplicación de los termistores PTC será la zona11. para la cual se cumple:
donde: • R{ es la resistencia del PTC a la temperatura absolu-ta T.
• A. B Y E son constantes características (A y E tienenunidade~ de ohmios).
El margen de utilización de esta expresión será: TI < T < T~.en el cual. el coeficiente de temperatura para A < < B será de laforma:
dR B·E·e"TIX -.--,------ B
Expresado en tanto por ciento:
IX B· I 02 (En % K 1)
1.5.3.2. Otros sensores de temperaturamediante semicondudor
Existen diodos de arseniuro de galio (GaAs) y silicio (Si)que pueden ser utilizados en un rango de temperaturas com-prendido entre I K Y 400K. Es posible encontrar tambiénconfiguraciones basadas en transistores. En ellos la pen-diente de la característica resistencia-temperatura y la sensi-bilidad es diferente en función del tramo del rango de medi-da que se trate. Para su excitación es necesaria una fuenteregulada de corriente constante y el aparato de medida aemplear ha de ser sensible y poseer una elevada impedanciade entrada.
Entre los circuitos integrados se utilizan sensores quegeneran en su salida una tensión proporcional a la temperatu-ra del tipo LM35 cuya sensibilidad es de IOmV/"C y LMI35con sensibilidad de IOmV/K y otros que se comportan comouna fuente de corriente proporcional a la temperatura del tipoAD590 que posee una sensibilidad de I¡..tA/"C. En generalposeen una respuesta prácticamente lineal.
© ITp·PARANINFO

Lente
• Pirómetros de radiación total.• Pirómetros de radiación parcial.• Pirómetros de radiación bicromática.
1.5.5.1. Pirómelro de radiación total
1.5.5.2. Pirómelro de radiación parcial(monocromáticos)
TERMOPllA *Figura 1.22. Pirómetro de radiación total.
Se utilizan cuando se desea realizar la medida de la tempera-tura sin contacto material y sin ejercer ninguna influencia sobrela temperatura del objeto bajo prueba.
Los tres tipos de pirómetros de radiación utilizados en laindustria son:
La parte de los termopares expuesta a la radiación está enne-grecida para que su comportamiento sea similar al de un cuerponegro, aumentando la absorción de energía.
La r.e.m. proporcionada por la pila termoeléctrica depende dela temperatura de la unión fría, por lo que se utilizarán técnicasde compensación de la misma.
La relación entre la f.e.m. generada y la temperatura del cuer-po bajo prueba será independiente de la distancia entre él y lalente si no existe la presencia de gases y otras sustancias quepuedan absorber energía entre ellos, y siempre que la imagen dela superficie radiante cubra totalmente la unión caliente de la ter-mopila. Son, por tanto, sensibles a gases y otras sustancias quepuedan encontrarse entre el pirómetro y la superficie del cuerpocuya temperatura se desea medir.
Las temperaturas indicadas por este método de medicióndifieren de las verdaderas en función del tipo de lente empleaday el coeficiente de emisión del cuerpo. Será necesario, por tanto,realizar la adecuada corrección mediante tablas de coeficientesde emisión y las curvas de corrección de la lente empleada uotros procedimientos.
La radiación emitida por el objeto en el cual se desea medirla temperatura se concentra en una termopila, constituida porvarios termopares (Pt-Pt/Rh) de pequeñas dimensiones y conec-tados en serie, mediante una lente de pyrex, sílice o fluoruro decalcio (figura 1.22).
Vao
o•
R=18K~ D-
o +Vs
donde: • T es la temperatura absoluta de la superficie emisora.
• W es la cantidad de energía radiada por unidad detiempo y superficie en todas las longitudes de onda.
W• (Jes la constante de Stefan-Boltzman (5,67· LQ-8_Z4)'
m-K
Se basa en la ley de Stefan-Boltzmann, la cual dice que lacantidad de energía radiada, por unjdad de tiempo y superficie,por un cuerpo negro ideal es proporcional a la potencia cuarta dela temperatura absoluta del cuerpo.
w=o·r4
Su principio de funcionamiento se basa en la variación de fre-cuencia de oscilación que experimenta el oscilador a cristal decuarzo cuando se modifica la temperatura del cristal. La talla delcristal se realiza de forma que se obtenga la mayor sensibilidadposible a este efecto.
La obtención de la temperatura se reduce a la medida de lafrecuencia del oscilador, para lo cual la salida del oscilador ata-cará a un frecuenCÍmetro digital y a un visualizador que indicarátemperatura.
El rango de medida de estos dispositivos está comprendidoentre -100 °e y 250 0e.
Posee la ventaja de una gran inmunidad al ruido. En la actua-lidad prácticamente no se emplea debido al bajo costo de losconvertidores analógicos/digitales, empleados normalmente conotro tipo de sensores de temperatura.
1.5.5. Pirómetros de radiación
Figura 1.21. Circuito con LM35.
En la figura 1.21 se puede observar la utl ización del sensorLM35, en un montaje que entregará a su salida una señal de ten-sión positiva si se miden temperaturas por debajo de O°e ya quela señal de tensión proporcionada por el sensor está referida aO0e. Si el diodo posee una tensión umbral de 0,5V (Vy =O,5V),el rango de medida del conjunto sera de -50 °e a + 155 0e.
1.5.4. Transdudor a cuarzo
Los pirómetros de radiación miden, por tanto, la temperaturade un cuerpo a distancia, en función de la radiación luminosaque éste emite.
Son sensibles a una única banda de frecuencias de emisión.Poseen un tiempo de respuesta rápido y son poco sensibles amagnitudes parásitas.
© ITP-PARANlNFO

Figura 1.23. Pirómetro manual de radiación parcial (corriente variable).
Lo~ plrometros optlCOS de radiación parcial manuales sebasan en la comparación visual entre la emisión producida porel objeto bajo prueba y la emisión de una lámpara de filamentoincandescente, pudiendo ser de corriente variable en la lámpara(figura 1.23) o de corriente constante en la lámpara con varia-ción de brillo en la imagen del objeto (figura 1.24).
IL ,
~r
I
1.5.5.3. Pirómetros de radiación bicromática
Está basado en la dilatación de ~ólid s y es muy empleado ensistemas de seguridad o regulación cuando se les dota de con-tacto~ eléctricos.
Su principio de funcionamiento se basa en el diferente coefi-ciente de temperatura de dos metale~ laminados conjuntamente.Pueden configurarse en forma recta, curva e incluso en forma deespiral. Al variar la temperatura uno de ellos se dilatará o con-traerá más que el otro. produciéndose una variación en la curva-tura del par bimetálico. Si uno de lo~ extremos está lijo. en elotro se producirá un de~plazamiento (o giro) al variar la tempe-ratura.
Se basan en la relación existente entre las intensidades deradiación del cuerpo a do~ longitudes de onda diferentes paradeterminar la temperatura del mismo. Este tipo de pirómetros nose ve influido por magnitudes parásitas.
1.5.6. Termómetro bimetálico
Lente
Lámpara decomparación
o 1 2 3
1I c;J
Filtro
Ventanillade enfoque
1Prisma Persiana
Figura 1.24. Pirómetro manual de radiación parcial (corriente constante).
Ventanillade enfoque
/\, (
.Á.
•• I t 11
Lámparade enfoque
Lente
1.5.7. Termómetros por dilataciónde fluidos
Su funcionamiento se basa en la dilatación experimentadapor líquidos y gases al aumentar su temperatura.
El termómetro de vidrio es, sin duda. el más conocido. Cons-ta de un depósito de vidrio que conti e un fluido (mercurio,alcohol. pentano, tolueno, etc.) que al calentarse se dilata y subepor el tubo capilar.
Existen termómetros de mercurio que. además, aprovechan lacaracterística conductora del mi~mo para efectuar un contactoeléctrico.
Figura 1.25. Medida de temperatura por comparación.
Cuando la luminosidad del filamento se confunde con la dela imagen del cuerpo emisor (figura 1.25) se puede obtener latemperalUra en función de la intensidad de con;ente en la lám-para o de la vm;ación de brillo que se ha provocado en la ima-gen del cuerpo.
En los termomanómetros. la variación de temperatura en unfluido. dentro de un recipiente hermé'lico se traduce en unavariación de presión. Si ~e mide la variación de presión es posi-ble obtener el valor de la temperatura.
Los termómetro~ de bulbo y capilar consisten. esencialmenteen un bulbo que se conecta mediante un capilar a una espiral.Cuando la temperatura del bulbo se moJifica. el gas o el líquidoen el bulbo se expande y la espiral tiende a desenrollarse. Conec-tando a ésta un dispositivo indicador (aguja) y graduando laescala adecuadamente se puede obtener el valor de la tempera-tura. Existen varias clases de este tipo de termómetros:
Clase 1: Termómetro~ actuados por líquido.Clase [1: Termómetros actuados por vapor.Clase 1fI: Termómetros actuado~ por gas.C1a~e [V: Termómetros actuado~ por mercurio.
Temperaturaalta
Temperaturacorrecta
Temperaturabaja
Tienen el inconveniente de necesitar la presencia de un ope-rador humano.
Los pirómetros de radiación parcial automáticos disponen delmecanismo necesario que modifica la intensidad a través delfilamento de la lámpara hasta conseguir que la radiación de lamisma coincida en brillo con la de la imagen del objeto. En esemomento, la intensidad de corriente por la lámpara será funciónde la temperatura del objeto sometido a medición.
1.6. Transductores de velocidady desplazamiento
Como su nombre indica, los transductores de velocidad seemplean para detectar la velocidad de un móvil. tanto lineal
© ITP-PARANlNFO

1.6.1. Transdudores de velocidadangular analógicos
En cuanto a los transductores de desplazamiento, los másimportantes se indican en la tabla 1.9. En ocasiones, una mismatecnología se podrá utilizar para obtener dispositivos sensibles aldesplazamiento lineal o angular.
1{
Inerementales
Absolutos
¡PotenciométrieosInductivosSinero·máquinasCapaeitivos
{Taquímetro de hiloTaquímetro electromagnético
Analógicos
Digitales (Eneoders)
¡ {TacodínamoAnalógico Tacoakemador
{
FotoeléctricosDigital (Encoders) Inductivos
Etc.
Angular
Lineal
Transduetores de desplazamíento
Transductores de velocidad
como angular. Los transductores de desplazamiento se utilizanpara detectar la posición de un objeto en un instante determina-do, la distancia recorrida por el mismo o el giro a que ha sidosometido en su caso.
• Transductores de velocidad y desplazamiento lineal• Transductores de velocidad y desplazamiento angular
Aplicaciones de los primeros se encuentran en cilindrosneumáticos o hidráulicos, prensas hidráulicas, etc., mientras quelos segundos se aplican en todo tipo de sistemas rotativos.
Conviene, por tanto, reCOrdar que para cada tipo de movi-mjento (lineal o angular), existen determinadas relaciones entredesplazamiento (o ángulo girado), velocidad, aceleración ytiempo, pues dichas relaciones permitirán, en el transductor,obtener una señal proporcional a la magnitud objeto de medida.Las más importantes se detallan en la tabla 1.7, donde:
• x es desplazamiento lineal (m).• ves la velocidad lineal (mis).• a es la aceleración lineal (mls2).
• e es desplazamiento angular (radián).• úJ es la velocidad angular (radián/s).• a es la aceleración angular (radián/s2).
Los transductores que aquí se tratarán se referirán únicamen-te a velocidad o desplazamiento de sólidos, pues la medida develocidad de fluidos se realiza de forma diferente.
Atendiendo al tipo de movimiento del objeto sujeto a medi-da, una primera clasificación se puede realizar en función deéste:
dxV=--
dt
dv8=--
dt
1.7.
de00=--
dt
doolX=--
dt
Los tacogeneradores son aquellos transductores de veloci-dad angular analógicos cuyo principio de funcionamiento essimilar al de los generadores de energía eléctrica.
Se basan, para su funcionamiento, en la ley de Faraday, lacual establece que la fuerza electromotriz inducida en un circui-to eléctrico formado por un conductor cerrado (espira) es numé-ricamente igual a la derivada respecto al tiempo, cambiada designo, del flujo magnético que lo atraviesa.
déPE = ---
dtEn muchas ocasiones, la velocidad angular se mide en revo-
luciones por minuto y no en radianes/segundo.
Según el tipo de señal proporcionada por el transductor sepueden clasificar en:
• Analógicos (función continua).• Digitales (función discreta).
Otro tipo de clasificación se puede realizar en función delprincipio físico empleado por el transductor:
• Potenciométricos.• lnductivos.• Capacitivos.• Ópticos.• Etc.Por otra parte, con determinados transductores se podrán rea-
lizar simultáneamente la medida tanto de desplazamiento y posi-ción como de velocidad, teniendo en cuenta las relacionesexpresadas en la tabla 1.7.
Los transductores de velocidad más relevantes se indican enla tabla 1.8.
donde: • E es la fuerza electro motriz inducida.• ([J es el flujo magnético.• t es el tiempo.
En el caso de un circuito plano con N espiras, la fuerza elec-tromotriz inducida será:
déPE=-N·--
dt
Si varias espiras formando un cuadro rectangular se encuen-tran en el interior de un campo magnético de tal forma que elflujo que las atraviesa sea variable (bien por rotación del cuadroo del campo magnético), y siendo ex el ángulo formado por elplano de la bobina con la normal al campo, el flujo que atravie-sa el cuadro es de la fonna <1>= A-B-cos ex, siendoA el área limi-tada por él y B la inducción magnética (densidad de flujomagnético ).
La derivada del flujo respecto al tiempo es, por tanto:
déP da.-- = -A·B· sena..--dt dt
© ITP-PARANINFO

La variación de a respecto al tiempo es la velocidad angularw. Si el cuadro tiene N espiras. la fuerza electromotriz inducidaserá proporcional a la velocidad angular y será de la forma:
N· d<fJ N'A ·w'sell exdI
En función del tipo de señal suministrada por el tacogenera-doro podrán ser:
Dínamo tacométrica o tacodínamo cuando a su salidaproporciona una señal de corriente continua.Alternador tacométrico o tacoalternador cuando a susalida proporciona una señal de corriente altellla.
to al tiempo (dC/>/dl) será nula y. por consiguiente. no existiráintensidad de cOITiente.
N
S
Figura 1.27. Tacodínamo de una sola espira en la posición "b".
En el momento en el que la espira alcanza la posición de lafigura 1.28, la variación de flujo magnético volverá a ser máxi-ma. al igual que la intensidad de cOITiente. Esta intensidadtendrá. en la espira. el sentido contrario al que poseía en la posi-ción inicial. La corriente por la carga tendrá. sin embargo. lamisma polaridad ya que la posición de las escobillas en las del-gas del colector ha cambiado. realizando éste la función de rec-titicador.
././
././N
Inductor
Al girar el inducido, la espira corta el campo magnético pro-ducido por el inductor. Cuando se encuentre en la posición indi-cada en la figura 1.26, la variación de flujo magnético con res-pecto al tiempo (dC/>/dl) será múxima y también lo será laintensidad de corriente inducida.
Está constituida por:
Un inductor fijo denominado estator que genera, median-te electroimanes o imanes permanentes. un campo magné-tico con un número par de polos.
Un inducido giratorio o rotar constituido por cuadros deespiras cuyos extremos están conectados a un colector.En estas espiras se inducirá una fuerza electromotrizdebida a las variaciones del flujo magnético durante larotación. El colector es solidario al inducido y en él seproduce la cone.xión eléctrica con el circuito exterior:está compuesto por un número par de segmentos aisla-dos eléctrica mente entre sí (delgas) sobre los cuales fro-tan dos escobillas fabricadas con un material derivadodel carbón. El número de del gas será el doble de la can-tidad de cuadros de espiras existentes.
Considerando una tacodínamo con una única espira y dosdelgas en el colector (figura 1.26). su funcionamiento será elsiguiente:
1.6.1.1. Dínamo tacométrica (tacodínamo)1
S
N/'
/'/'
/'
+Figura 1.28. Tacodínamo de una sola espira en la posición "c".
Espira(Inducido)
Sentidode rotación En la tigura 1.29 se aprecia la forma de onda de la intensidad
de con'iente por el inducido y en la carga.
Figura 1.26. Tacodínamo de una sola espira en la posición "a".
Cuando. en su rotación, la espira alcanza la posición indica-da en la figura 1.17. la variación de flujo magnético con respec- Figura 1.29. Intensidad de corriente por el inducido y la carga.
...t
•. t
Corrientecarga
Corriente •inducido
InductorS
Delga
Escobilla
Colector
Resistenciade carga
4 © ITP-PARANlNFO

CargaVs
Rotar (Inductor)V
Figura 131. Alternador tacométrico elemental.
Eje sensor \
Su principal ventaja consiste en no necesitar para su funcio-namiento ni colector ni escobillas, lo cual le dota de mayor vidamedia. El mayor inconveniente que posee es el no poder deter-minar el sentido de giro ya que en su salida se obtiene una señalproporcional al valor absoluto de la velocidad de giro del rotor.
Los circuitos acondicionadores para este dispositivo conver-tirán la tensión de salida en una señal cuya frecuencia sea inde-pendiente de la amplitud, obteniéndose una elevada inmunidadal ruido y facilitando su transmisión a distancia, o una señal con-tinua cuya amplitud varíe en función de la velocidad de giro .
V. • Id)
(al í\ .I'J(CI lalV "'
(bl lb)
1.6.1.2. Alternador tacométrico(tacoalternador)
u -
Se trata de un dispositivo que genera a su salida una señalalterna senoidal cuya frecuencia y amplitud son proporcionalesa la velocidad de rotación de su ej~.
La variación de flujo magnético a través de las espiras se con-sigue, en este caso, mediante un imán giratorio.
Un alternador tacométrico elemental (figura 1.31) está com-puesto por:
• Un rotor constituido por imanes permanentes (elementoinductor).
• Un estator o elemento inducido, formado por un bobinadoen el que se induce una f.e.m. senoidal cuya amplitud yfrecuencia son proporcionales a la velocidad de rotacióndel inductor.
En la figura 1.32 se representan diferentes posiciones delrotor con respecto al inducido y la forma de onda de la tensiónde salida.
Estator
donde: • Vmed es la tensión media generada a su salida.• K es la constante taquimétrica proporcionada por el
fabricante.• n es el número de revoluciones por minuto.
La constante taquimétrica puede variar por:
• Nivel de intensidad alcanzada (reacción de inducido).Cuanto menor sea la intensidad generada, menor será suinfluencia sobre dicha constante. En cualquier caso latacodínamo atacará a un amplificador de alta impedanciade entrada para que el efecto de la intensidad de corrientesea despreciable .
• Temperatura. Las características magnéticas del elementovarían con la temperatura, influyendo negativamentesobre todo en las dínamos tacométricas de imanes perma-nentes.
V =K'nmed
V espiraFigura 1.30. Tensión de salida de una tacodínamo.
-oQl
E>
V salida
v - V .Ondulación = _1TI_a_x __ "_"_"
La tensión de salida no es estrictamente continua, sino quepresenta una cierta ondulación. Uno de los factores de calidad deestos transductores es la ondulación que se define de la forma:
En la práctica se obtiene una f.e.m. más uniforme arrollandoun gran número de espiras sobre el inducido y poniendo en con-tacto cada espira con su propio par de segmentos de conmuta-ción (delgas). Las escobillas hacen contacto con cada espiradurante un tiempo muy corto que corresponde al instante en quela f.e.m. se encuentra próxima a su valor máximo. Así, si hubie-ra seis espiras en el inducido igualmente espaciadas sobre su cir-cunferencia se producirían seis f.e.m. como se indica en las cur-vas de trazo fino de la figura 1.30. La diferencia de potencial enlos bomes de la tacodínamo está representada en trazo grueso.
La tacodínamo debe ir acoplada con el eje que se encuentraen rotación y del que se desea medir la velocidad angular,JTIoti-vo por el que supone una ~arga adicional para el mismo. El rotorde la dínamo tacométrica debe tener muy poca inercia con el finde someter al eje al mínimo movimiento de torsión. Este es elmotivo por el que son utilizados cada vez menos, tendiéndose aemplear detectores de velocidad digitales, los cuales resultanmás precisos y económicos.
Estas dínamos generan una f.e.m. cuya amplitud es propor-cional a la velocidad angular y su polaridad indica el sentido degiro.
La señal de salida de la dínamo tacométrica presenta unavariación de frecuencia proporcional a la velocidad de giro y alnúmero de delgas del colector, por lo que será necesario intro-ducir un filtro R-C que elimine dicha variación.
Figura 1.32. Diferentes posiciones del rotor respecto al inducido y Vs'
Podrá trabajar a velocidades relativamente pequeñas puestoque la información de la velocidad está en la frecuencia de la
© ITp·PARANlNFO

Eje sensor
(¡)
MOTOR
EJEDISCO
Figura 1.34. Detección por transparencia.
A6:~T~~R:Sa ida A
A6~~T~~R ~a da B
A6~pCT~~R ~a ,da e
En los detectores por transparencia. emisor y receptor semontan enfrentados. interponiéndose entre ambos los dientes uorificios del disco acoplado al elemento móvil (figura 1.34).
La anchura de la~ franjas o de la~ ranuras, así como su sepa-ración deben estar en relación con la rapidez de respuesta delfototransistor, debiéndose obtener impulsos claros en todo elrango de velocidades a detectar.
Exi~te la posibilidad de poder detectar el ~entido de girointroduciendo un doble sistema emi~or-receptor. situados, pró-ximos y en la mi~ma circunferencia. de forma que uno de ello~se activará ante~ que el otro. en función Jel ~entido de giro (figu-ra 1.35).
EMISOR RECEPTOR
/..Alimentación:
AlimenlaClon
Atimenlacion :
Son aquéllos que generan a su salida una señal de tipo digi-tal. Proporcionan. por tanto. un número de impulsos por cadavuelta del eje en rotación. de tal fOnll<1 que cuanto mayor sea elnúmero de revoluciones a las que gira dicho eje. mayor será lafrecuencia de dichos impulsos. Si se desease una señal analógi-ca proporcional a la velocidad angular basta con utilizar un con-versor frecuencia-tensión.
~eñal generada. resultando mayor su inmunidad al ruido y másfácil la transmisión de la misma.
Reciben el nombre de codificadores (encoders) incrementa-les y suclcn estar consLilUidos por un disco que gira solidario conel eje de rotación cuya velocidad se pretende medir.
En función de la tecnología empleada en la detección de pul-sos. el di~co utilizado e~tará dentado o poseerá una pista situadaen el perímetro exterior dispuesta con zonas opacas y transpa-rente~ a la magnitud fÍ~ica base de la detección.
La~ diferentes tecnologÍa~ empleadas en la fabricación deestos dispositivos son:
Inductiva por reluctancia variable.Inductiva por corrientes de Foucault.Por efecto Hall.Capacitiva.Magnetorresisti va.Fotocléctrica.
1.6.2. Transduclores de velocidadangular digilales
1
Lo~ lll<lS empleados son los transductoresjotoeléctricos y losindllctivoS.
Disco
Los transductores fotoeléctricos constan. fundamentalmente,de un emi~or de luz (cliodo led) y de un receptor (fototransistor),pudiendo actuar por reflexión o por transparencia. En los pri-meros, el cmisor y receptor están montados en un mismo frente,uno al lado del otro y el haz de luz incidente se reflejará o seráabsorbido por las franjas alternas (en dos colores muy contras-tados: blanco y negro) dispuestas sobre la superficie móvil (figu-ra 1.33).
Figura 1.35. Detección de sentido de giro.
Los transductores de velocidad indllcnvos se usan, principal-mente. en aquellas aplicaciones donde la suciedad forme partedel entorno de trabajo. En los de reluctancia variable el discodentado. de material ferromagnético, se encuentra en el interiorde un campo magnético. provocándose perturbaciones delmismo en función de si éste ha de atravesar o no la hendiduradel disco.
(¡) ',..1/--.--
RECEPTOR / 1"EMISOR
+ Vcc o o GNDOUT
MOTOR
En cualquier ca~o. se trata de dispositivos robustos. simples.inmunes a ruidos y cuya señal de salida resulta fácil en su con-versión y tratamiento.
1.6.3. Transduclores develocidad lineal
Figura 1.33. Transduclor fotoeléctrico de velocidad angular por reflexión.
Al incidir el ha/. de luz emitido sobre las franjas marcadasradialmentc en el disco. se reflejará en las blancas y hará queel fototransistor se sature. Por el contrario, cuando el haz inci-da sobre las franjas oscuras, no existirá reflexión y el foto-transistor pennanecerá cortado. Se obtiene así un tren deimpulsos.
La medida de la velocidad del despl' zamiento rectilíneo es elobjeto de este tipo de transductores. El número de ellos existen-te es muy limitado. ya que en la medida de la velocidad lineal sesuelen utilizar transductores de velociJad angular previa con-versión del movimiento lineal en angular.
Entre los diferentes tipos de transductores empleados para lamedida de velocidad lineal se encuentran los taquímetros de hiloy los electromagnéticos.
© ITP-PARANINFO

Pista de altaresistencia entreAyB
Bi
Pista de baja resistencia
Figura 1.37. Transductor potenciométrico.
J :]erminalest CURSOR METAL para medirv7 7¿ 71 / ¿ 7 77 7 ¿ 7 7 77/ resistencia
A
Figura 1.39. Transductor potencio métrico CERMET.
e
• Potenciómetros CERMET: Están constituidos (figura1.39) por un sustrato aislante sobre el que se deposita, porprocedimientos electroquímicos, una capa de óxido metá-lico. Poseen mejor resolución que los bobinados pero noson tan robustos.
El movimiento del cursor dependerá del desplazamiento delobjeto sujeto a medida ya que estará unido mecánicamente almencionado objeto (figura 1.37).
Eje sensor(cursor)
Figura 1.38. Transductor potenciométrico bobinado.
A Bo
El valor óhmico de la resistencia existente entre cualquiera delos extremos del potenciómetro y el cursor dependerá, ademásde la constitución interna del dispositivo, de la posición de dichocursor y, por tanto, del desplazamiento o posición del objetobajo prueba.
Las principales técnicas de fabricación de estos elementosson tres:
• Potenciómetros bobinados: La resistencia se obtienemediante un hilo metálico bobinado sobre un soporte ais-lante (figura 1.38). Se caracterizan por poseer una malaresolución, ya que la variación de resistencia no es conti-nua (el cursor salta de espira en espira). Suelen ser ele-mentos de difícil elaboración y alto coste.
Magnitudfisica quemueve elcursor
F~o SALlD~-!
IMÁNPERMANENTE--c=J--
Devanado
Figura 1.36. Taquímetro lineal electromagnético.
Vástago deunión alobjeto enmovimiento
La linealidad de estos dispositivos suele ser del orden del 1%Yel recorrido máximo está limitado aproximadamente a 60 cm.
Se emplean para la detección de desplazamiento (o posición),tanto lineal como angular, siendo, en cada caso, diferente la geo-metría del dispositivo.
Están constituidos por una resistencia fija sobre la cual sedesplaza (lineal o angularmente) un contacto eléctrico o cursor.
Existirán, por tanto, dos tipos de taquímetros lineales electro-magnéticos:
• De imán móvil en el que el objeto sujeto a medida se aco-pla mecánicamente al imán permanente .
• De bobina móvil en el que el objeto se acopla mecánica-mente a la bobina.
Son, por tanto, transductores de tipo activo, por lo que nonecesitan para su funcionamiento de ningún tipo de excitación.
La señal de salida indicará, asimismo, el sentido del despla-zamiento y la máxima velocidad estará determinada por la máxi-ma f.e.m. inducida que soporte el bobinado, pudiendo llegar a25 mis.
El móvil cuya velocidad se pretende medir se une al extremode un hilo, el cual está bobinado a un eje giratorio. Solidario conel eje se encuentra un transductor de velocidad angular el cualmedirá una velocidad de rotación proporcional a la velocidad dedesplazamiento lineal del móvil. Se realiza en ellos, por tanto,una conversión de desplazamiento lineal en angular.
La precisión global de este tipo de transductores es del ordendel 0,25% y la carrera del objeto puede ser de hasta 12 metros.El hilo ha de ser capaz, en cada caso, de soportar la fuerza detracción a la que se le somete.
Están compuestos por un imán pennanente y de una bobina.Cuando uno de los dos se desplaza con respecto al otro se pro-voca una variación de flujo magnético a través de la bobina queinducirá en ella una fuerza electromotriz proporcional a la velo-cidad de desplazamiento (figura 1.36).
1.6.4.1. Transdudores potenciométricos
1.6.4. Transdudores dedesplazamiento analógicos
1.6.3.1. Taquímetro de hilo
1.6.3.2. Taquímetro lineal electromagnético
© ITP-PARANINFO

Potellciómetros MAGNETO-RESISTENTES: Utilizancomo sensor una magnetolTesistencia y como elementomóvil un imán (figura IAO). Tienen la ventaja de no exis-tir contactos metálicos ni roces. Como inconveniente cabedestacar su dependencia de la temperatura. La magnetorre-sistencia varía su valor óhmico de unos 100 Q cuando lainducción es nula a I ,5K Q cuando la inducción es de unos6.000 Gauss.
I MAGNETORRESISTENCIA I.. ~ N
1--- IS
Imán
Circulares con un rango de medida inferior a 360 o (figu-ra IA2)Multivuelta o helicoidales cuyo rango de medida es unmúltiplo de 360 o.
Entre los potenciómetros angulares existen dos tipos dife-rentes:
oSalidao
1Figura 1.40. Potenciómetro magneto-resistente. Rn
La máxima velocidad de desplazamiento del cursar está fija-da por el fabricante, con el fin de asegurar el adecuado contactoeléctrico entre cursar y elemento resistivo.
Exceptuando los potenciómetros basados en magnetorresis-tencia, uno de sus inconvenientes consiste en el inevitable des-gaste mec<1nico que se produce por el rozamiento entre el cursory la supedicie sobre la que se desplaza, el cual inOuye directa-mente en la vida media del potenciómetro.
Como ya se ha puesto de manifiesto anteriormente, en fun-ción de su geometría se emplearán para la medida de desplaza-mientos lineales o angulares.
En la medida de desplazamientos lineales, su rango de medi-da no suele superar los 10 cm.
Considerando el potenciómetro de la figura IAI, la resisten-cia entre el cursar y cada uno de los extremos del potencióme-tro será de la forma:
Figura 1.42. Potenciómetro angular.
, R(fl
R"
RCII ~
R" qJ"
Re\
Si se considera ahora el potenciómetro de la figura IA2. laresistencia entre el cursar y cada uno de los extremos del poten-ciómetro será de la forma:
donde: • RCA y RCB son las resistencia~ entre cursar y cada unode los extremos del potenciómetro.
• R" es su resistencia nominal.• qJ" es la carrera del cursar.• qJc es el ángulo girado por el eje del potenciómetro.
Se han considerado elementos con una variación lineal deresistencia en función de la posición del cursar, pero es necesa-rio indicar que existen potenciómetros cuya variación no eslineal (logarítmica, exponencial, seno. coseno. etc.).
RR ~-"'(L e)
CIJ LR
"-·eL
donde: • RCA y RCB son las resistencias entre cursar y cada unode los extremos del potenciómetro.
• R" es su resistencia nominal.• L es la longitud del elemento.• e es la distancia entre cursar y extremo A.
B
O ! !
I~R CB
O C 1 Rn
R CA
O, ,
A
Figura 1.41. Potenciómetro lineal.
1.6.4.2. Transdudores indudivosBasan su funcionamiento en el hec o de que en todo con-
ductor que se encuentra en el interior de un campo magnéticovariable se induce una fuerza electromotliz, tal y como enuncióFaraday.
Los transductores de desplazamientü inductivos pueden serde dos tipos:
De inductancia variable.Transformadores diferenciales (LVDT).
1.6.4.2.1. Transdudores de indudancia variable
Utilizan para su funcionamiento la variación de reluctanciaque se produce en un circuito magnético cuando su núcleo ferro-
© ITP-PARANlNFO

Bobina
Figura 1.43. Transductor de inductancia variable.
1.6.4.2.2. Transformador diterencial (LVDT)
1.6.4.3. Sincro-máquinasSon transductores de desplazamiento angular de aspecto
similar al de los motores. Se caracterizan por su robustez y pre-cisión, siendo su campo de aplicación el de las máquinas de con-trol numérico, robótica y numerosos sistemas en los que resultanecesario el control de posición.
Básicamente se tratan de transformadores con acoplamientovariable, en los que uno o varios de los devanados pueden des-plazarse respecto a los demás. Variando el acoplamiento entreprimarios y secundarios, es decir, la inductancia mutua entreellos, variará también la tensión alterna inducida en los devana-dos si uno o más de los primarios se excitan con corriente alter-na. Poseen, por tanto, dos circuitos magnéticos, uno en el esta-tor y otro en el rotar.
Su momento de inercia es pequeño, siendo relativamente bajala carga mecánica que se realiza sobre el eje de giro. Son pocosensibles a la temperatura, humedad, choques y vibraciones,pudiendo trabajar en ambientes polvorientos.
La necesidad de escobillas en la conexión eléctrica del rotares el principal inconveniente que presentan.
Entre las diferentes configuraciones de las sincro-máquinasse encuentran el SINCRO y el RESOLVER.
1.6.4.3.1. Transformadores síncronos lrifásicos (sincros)
Material noferro magnético
6XNúcleo ferromagnético
Bobirwdos secundario
0000000\0000
100000000001
o o
Está constituido por una cápsula cilíndrica en la que se hanrealizado tres bobinados idénticos, distribuidos geométricamen-te tal y como muestra la figura 1.44. Por su interior se puede des-plazar un núcleo de material ferromagnético que, mediante eladecuado acoplamiento mecánico irá unido al objeto móvil cuyodesplazamiento se trata de detectar.
magnético se desplaza, por estar unido mecánicamente al obje-to del que se desea conocer su desplazamiento (figura 1.43).
Pueden ser de entrehierro variable o de núcleo móvil y estarcompuestos por una bobina o por dos en oposición.
i 52
o
a I
\~\ ,\ ,/')'/./ :
R1 o' :,,
./53 o 'o 51 R2 o'
Figura 1.45. Representación esquemática de un transformador síncrono.
Son otro tipo de transformadores variables similares a los sin-cros, cuyos devanados están dispuestos formando un ángulo de90 o en el estator y en el rotar.
1.6.4.3.2. Resolvers O resolucionarios
Se trata de un transformador variable. Consta de un estatorcilíndrico de material ferro magnético, con tres bobinados dis-puestos a 120 o conectados en estrella, y un rotar, también dematerial ferro magnético, con uno, dos o tres bobinados.
Al aplicar una tensión alterna en el rotar (50, 60, 400 o2.600 Hz), el estator realiza la función de secundario. Las ten-siones inducidas en los devanados del estator serán de lamisma frecuencia que la de referencia que alimenta al prima-rio y sus amplitudes dependerán de la posición relativa entrerotar y el correspondiente bobinado del estator (ángulo forma-do entre primario y secundario).
Su rango de medida es de 360 o y su precisión, según mode-los, varía entre cinco y treinta minutos .
En la figura 1.45 se observa la representación esquemática deun transformador síncrono y su notación asociada.
Bobinado primario
•
"OVS1 VS
•VS2
Núcleoferromagnético
Figura 1.44. Transformador diferencial (LVDT).
Si se alimenta el primario con una corriente alterna, se creaun campo magnético variable. A medida que el núcleo se des-plaza entre los devanados, la amplitud de la corriente alternainducida en los secundarios variará en función de la posición dedicha pieza. La variación en las tensiones de los secundarios,una vez conectados en serie oposición, servirá para cuantificarla magnitud física causante de la variación, así como la direc-ción del desplazamiento en función de la fase de la señal resul-tante (Oo 180 O).
Mediante estos dispositivos se pueden detectar desplaza-mientos desde 10-7 m hasta 2 cm con gran precisión (0,05 %).Para mayores recorridos deben construirse especialmente.
Sus aplicaciones más usuales están en palpadores, bancos deensayos, medidores de espesor, etc.
© ITP-PARANINFO

Po~een una preci~i<Ín, según modelos, entre I y 20 minutos.Sus aplicacioncs. además de la mcdida de ángulos, son la trans-ll1i~i<Íll.recepción y convcr~ión de datos angulares.
En la figura 1.-+6 ~e repre~enta un rcsolver eléctrico en el quchay do~ devanados en el rotar y dos en el estator, pero puede queuno de 1m cuatros no se utilice (se deja en circuito abier10 o cor-tocircuito a cOIl"eniencia).
S2 S4
donde: • e es la capacidad del condensador.• e es la capacidad específica de inducción.• l es la longitud del condensador.• r¡ es el radio de la armadura exterior.• r] es el radio de la <u'madura interior.
rl
rl
R2 o Sl
Figura 1.46. Representación esquemática de un resolver eléctrico.1
R4
Rl R3
L
1.6.4.4. CapacitivosBasan su funcionamiento en la variación de la capacidad de
un condensador al actuar sobre él la magnitud física que se deseamedir.
Figura 1.48. Condensador cilíndrico.
Figura 1.47. Condensador plano.
Para Ull condensador cilíndrico (figura 1.48), su capacidadviene dada por la expresión:
e 2·1t·¡;· __ 1-r¡
In-r2
donde: • e es la capacidad del condensador.• Ke es el coeficiente dieléctrico.• S, es la capacidad específica de inducción en el vacío.• e es la capacidad específica de inducción.• S es la superficie de una de las armaduras.• d es la distancia de separación de armaduras.
Se emplean para medir pequeños desplazamientos, aunquetambién se pueden usar para cuantificar fuerzas.
La capacidad de un condensador depende, únicamente deldieléctrico y de su geometría. En el caso de un condensadorplano (figura 1.-1-7). su capacidad viene expresada de la forma:
S Se K·¡;·- ¡;.-< "d d
1.6.5. Transductores dedesplazamiento digitales
Como ya se mencionó anteriormente. son aquéllos que gene-ran a su salida una señal de tipo digital. Proporcionan, por tanto,un número de impulsos por cada vuelta del eje en rotación ocada unidad de desplazamiento lineal.
Se utilizan pru'a la medida de desplazamientos, tanto linealescomo angulares. Reciben el nombre de codificadores (lineales oangulares), encoders (angulares) o reglas (lineales).
Las diferentes tecnologías empleadas en la fabricación deestos dispositivos son:
Inductiva por reluctancia variable.Inductiva por cOITientes de Foucalllt.Por efecto Hall.Capacitiva.Magnetorresisti va.Fotoeléctrica.
Los más empleados son los transductores fotoeléctricos(ópticos), seguidos de los illductivos, motivo por el que se desa-rrollarán en profundidad los primeros.
Los transductores fotoeléctricos constan, fundamentalmente.de un emisor de luz (diodo led) y de un receptor (fototransistor).pudiendo actuar por reflexión o por transparencia. En los pri-meros, el emisor y receptor están montados en un mismo frente,uno al lado del otro y el haz de luz incidente se reflejru'á o seráabsorbido por las franjas alternas (en dos colores muy contras-tados: blanco y negro) dispuestas sobre la superficie móvil.
Al incidir el haz de luz emitido sobre las franjas, se reflejaráen las blancas y hru'á que el fototransistor se sature, Por el con-U'ario, cuando el haz incida sobre las franjas oscuras, no existirá
Vb
nlJ
O
d
E
Va
+0
© /TP-PARANINFO

Figura 1.50. Encoder incremental con salida índice.
DISCO
"l Eje sensor
\ \
" //-- --=t--
\/
\
'¿,
Fototransistor
Salida •
P"'O JllJJlJlJlJUl[ljJJl. ~S.I;d. ¡ ~ 1"eI1, npaso U 1
Alimentación ~
Alimentación :.--
Para la medida de velocidad y desplazamiento angulares, condetección del sentido de giro, se introduce un doble sistema emi-sor-receptor, situados, próximos y en la misma circunferencia,de forma que uno de ellos se activará antes que el otro, en fun-ción del sentido de giro (figura 1.51).
A~~;T~~R Salida A~- - ~~.-;:::.~ ORCUITO -41 •
:'1'1 /,,/ // ADAPTAOOfI _Salida 8
/" -- e ~--l0t1 aRrollO ~ndice
~
/ ~", ,~,;,!Jl!Yj:K ADAPTADOR "
Alimentación • «.)/.. /
Alimentación =--- ====::::/:: "" E'. .. __ __.. _. _íf~>~_)'" .~_ Jese!,~o~.AhmentaClon. . .. _;>--~ ) I
": /~ " -.J',/. ~~y O;sco____-1....
• Incrementales, que proporcionan información de laposición actual referida a otra posición. Aunque puedenmedir desplazamientos, se utilizan principalmente parala medida de velocidades.
• Absolutos, que proporcjonan información sobre la posi-ción exacta.
Dentro de los codificadores existen dos tipos:
El dispositivo más simple posee únicamente un par emisor-receptor, proporcionando solamente información del despla-zamiento y no de su sentido.
En la figura 1.49 se puede observar la constitución de uncodificador incremental angular y otro lineal, así como laseñal proporcionada por ambos.
En los detectores por transparencia, emisor y receptor semontan enfrentados, interponiéndose entre ambos los dientesu orificios del disco acopladq al elemento móvil.
La anchura de las franjas o de las ranuras, así como suseparación deben estar en relación con la rapidez de respues-ta del fototransistor, debiéndose obtener impulsos claros entodo el rango de velocidades a detectar.
Proporcionan información del desplazamiento referido asituaciones anteriores. Se denominan encoders en el caso dedesplazamientos angulares o reglas si el desplazamiento eslineal.
reflexión y el fototransistor permanecerá cortado. Se obtiene asíun tren de impulsos.
1.6.5.1. Codificadores incrementa/es
Figura 1.49. Codificadores incrementales (encoder y regla).
ReceptorEmisor
Emisor <
Cursor ~Regleta
Figura 1.51. Encoder incremental con detección de sentido de giro.
La resolución de estos codificadores dependerá del ángulo decada segmento en el caso de los angulares y de la anchura decada uno de ellos en el caso de los lineales.
Figura 1.52. Detección de sentido de desplazamiento lineal.
En el caso de medida de velocidad y desplazamiento linealesse emplea un sistema similar, tal y como se puede observar en laregla de la figura 1.52, en la que se ha empleado e] sistema dereflexión.
Salida
REGLA INCREMENTAL
ENCODER INCREMENTAL
h~1~-=~I'ZSalida
Salida
En el caso de los encoders incrementales, se puede intro-'ducir un sistema capaz de determinar la posición inicial deldisco. Basta para ello introducir un nuevo par emisor-receptorque se active únicamente en uno de los segmentos del disco.A la señal proporcionada por este sistema se la denomina sali-da índice (figura 1.50).
Entrada
© ITP-PARANlNFO

El circuito acondicionador estará formado, principalmente.por un contador digital encargado de almacenar el número deimpulsos producido por el codificador. En la tigura 1.53 se haempleado un encoder incremental de 16 impulsos/vuelta y uncontador con 32 estados, por lo que transcurrida la segundavuelta se repetirán los estados del contador.
EntradaENCODER Salida eontaJe CONTADOR
INCREMENTAl(16Imp ..'vuellal BINARIO
• 50• 51• 52• 53• 54
paralelo. una combinación binaria de un determinado códigoque corresponde a la posición del sistema. independientementede las condiciones iniciales.
Con el fin de obtener el código de Il bits. se utilizan Il paresde emisores-receptores. En el caso de los angulares (tigura1.56), el disco estará constituido por 2/l segmentos y n pistasconcéntricas. Si se trata de codificadores lineales, la regla estarádividida en Il pistas. ) dentro de cada una de ellas existirán laszonas necesarias, opacas o transparente, (de reflexión o no) paracontigurar el código empleado (figura 1.57).
Salida' .' " ." >., ..... _, ." " ;< ._,
eowd" c-lfU~-'":- iL ~J":J, L "JSJlJUlflIlJ1.flJiLLrS JSU1!L~ _~1'lJL50 .~J.,~l_L5'
Figura 1.53. Circuito acondicionador de encoder incremental.1
52
53
54
L1[
____ 1
2' "uelta
Alimentación
Folodlodos
o
L1
Fototransistoreso
: CirCUito: adaptador
Ejesensor
Si se desea duplicar la resolución del sistema será necesarioincluir un circuito capaz de proporcionar un impulso por cadaflanco (subida o bajada) proporcionado por el codificador. En lafigura 1.54 se muestran las modificaciones a realizar en el cir-cuito de la figura 1.53. así como las formas de onda más repre-sentativas.
BINARIO Figura 1.56. Encoder absoluto en binario natural.
·t
Pistas
01234567023
A
B ---1 -'L-I-.~~ ~I -t
Jl íUl fl!1F -t
C
o 52
o 53
o 50
o 51- CONTADOREntradacontaJe
.f'-.....--~=.JUl/"" R B= C
Salida
I ENCODERI INCREMENTAL
(16 imp./vueltai
o 54
22.5" Regleta codificada Emisor ReceptorSalidaencoder
Entradacontaje
íLJJLJ' JLJLJLJlVA rLn LJLLJLrL~_VB(\J\.j~_
~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~_.11.25
Figura 1.54. Circuito para duplicar la resolución del sistema.Detección por reflexión
Figura 1.55. Acondicionador de encoder con detección de sentido de giro.
Si el codificador posibilita la detección de sentido de despla-zamiento, el acondicionamiento será de la forma que se indicaen la figura 1.55.
ENCODER l:REMENT~
Entrada
L:--------,IDOWN descendente
CIRCUITO DE DETECCiÓNDE SENTIDO D~ GIRO Y E,Ic,d,
DETECCION UP ascendenteDE FLANCOS
CONTADO~ : ~~DESCONTADOR
DIGITALo Sn.1o $n 2
Figura 1.57. Codificador lineal absoluto.
La resolución (menor desplazamiento que se puede detectar),en el caso de los angulares, dependerá del número de pistas (1/),de la forma:
Resolución2"
Si se trata de un codificador lineal, su resolución depen-derá, asimismo, del número de pistas (u) y de la longitud dela regla (L):
1.6.5.2. Codificadores absolutosR 1" Leso lIcton--
')"
Proporcionan, tal y como se ha mencionado, la posiciónexacta del elemento móvi 1.
Si en el codificador incrementai es necesario un sistema decontaje externo de los impulsos y la búsqueda de la posición ini-cial (índice), el coditicador absoluto suministra directamente, en
Para obtener una mayor resolución, será necesaJio aumentarel número de pistas y, por tanto, el número de pares emisor-receptor (el número de bits del código), aumentando la comple-jidad del codificador.
Con el tin de evitaJ' indeterminaciones. se utilizan códigosbinaJios cOlltinuos y cíclicos.
© /TP-PARANINFO

o Bn-1
)~- OBn-2
Figura 1.60. Convertidor Gray Binario.
o )D oB1
o_~)~BOG1
GO
Gn-2 0-
Gn-1 0----
-- ------- -- ---
Puesto que el código Gray resulta más difícil de utilizar queel binario natural, normalmente, se realizará la conversión a ésteultimo código, siendo ésta relativamente simple (figura 1.60).
\
Regleta codificada en código GRAY
Figura 1.59. Encoder absoluto lineal en código Gray.
A
Beo
1.7. Transdudores de fuerzao deformación
1.7.1. Resistivos. Galgasextensométricasl: 1.10.
Un código es continuo si las combinaciones correspon-dientes a números decimales (base diez) consecutivos sonadyacentes.
000000010011001001 1001.11O 10 101001 1001 1 011 1 1 11 1 1 O10101 O 1 1100 11000
Se denominan combinaciones binarias adyacentes aquéllasque difieren únicamente en un bit.
Un código continuo en el que la última combinación es adya-cente con la primera se denomina cíclico.
El código más utilizado en codificacores absolutos es elGray, también denominado reflejado ya que la formación delcódigo de n bits se realiza a partir del de n-l, repitiendo simé-tricamente las combinaciones de éste y añadiendo por la izquier-da un nuevo bit O para las 2n-1 primeras combinaciones y un 1para las 2n-/ siguientes.
En la tabla 1.10 se representa la formación de los códigosGray de 2,3 y cuatro bits.
La figura 1.58 muestra un encoder absoluto con codificaciónen código Gray.
Figura 1.58. Encoder absoluto en código Gray.
Su funcionamiento se fundamenta en la variación de resis-tencia que experimenta un conductor al deformarse. No poseen,por tanto, elementos o piezas móviles.
En el caso de un conductor con resistividad y sección cons-tantes, su valor óhmico se puede expresar de la forma:
LR=p'-
A
donde: • p es la resistividad del material.• L es la longitud del elemento.• A es área transversal del elemento.• R es la resistencia del elemento diferencial de con-
ductor al paso de la corriente eléctrica en la mismadirección en la que se ha medido la longitud L.
Se observa que la resistencia de un conductor dependerá,además del tipo de material con el que esté fabricado, de suscaracterísticas geométricas. Si se produce una deformación delconductor (variación de sus dimensiones), implicará una varia-ción en su valor óhmico, por lo que se puede evaluar la magni-tud física que ha actuado sobre él, que será proporcional a ladeformación.
Si se tratase de un codificador lineal, sería similar al de lafigura 1.59.
Considerando una lámina conductora sometida a tracción, sulongitud se incrementará, mientras que su sección transversal
© ITP-PARANlNFO

La razón entre el esfuerzo (F/A) y la deformación lineal sedenomina módulo de elnsticidad o módulo de Young (E), sien-do su valor una característica propia del matelial empleado.
!!...E.... dL'2'f.l.dLp L L
d R !!...E... dL dAR p 1, A
!!..!i ~ (1R p
Se observa que uno de los dos sumandos depende de la defor-mación física del material. En cuanto al otro sumando (dp/p). setrata del coeficiente piezorresistivo del material, el cual, gene-ralmente, es despreciable. En determinados substratos cristali-nos, sin embargo, es el término dominante.
Las galgas extensométricas se basan en este fenómeno físi-co. Generalmente son de tipo película (figura 1.62) y constan deuna fina capa metal izada de una aleacción conductora, deposita-da sobre una lámina de material plástico aislante, de forma queésta se pueda adaptar fácilmente a una superficie. El materialconductor sufrirá las deformaciones que afecten a la menciona-da superficie, siendo posible medir esfuerzos a partir de la varia-ción de resistencia.
La variación relativa del área transversal del elemento será,por tanto, de la forma:
elAA
Trasladándola a la expresión de la variación relativa de resis-tencia:
úl
L
L+óL
Figura 1.61. Lámina conductora sometida a tracción.
úl-Óúl
La relación entre la variación de dimensión y su valor origi-nal. denominada deformación lineal, se representa por E y es:
dLC --
L
disminuirá, aumentando el valor de su resistencia (figura 1.61).Asimismo, se modificará la distancia interatómica en el caso delos metales o la concentración de portadores de carga en lossemiconductores. factores que repercutirán en la resistividad delmaterial.
1
Módulo de elasticidad (E) EsfuerzoDeformación lineal
FT Ac d L
L
La galga ha de estar, por tanto, fijada al elemento sometido aesfuerzo. Es por ello preciso seleccionar adecuadamente eladhesivo a utilizar para cada aplicación, ya que una seleccióninadecuada puede dar lugar a medidas erróneas.
Figura 1.62. Galga extensométrica.
La sensibilidad de la galga se especifica mediante el denomi-nado factor de galga el cual se define como la razón entre lavariación relativa de resistencia y la deformación.
Puesto que el volumen. dentro de ciertos límites. permanececonstante. el alargamiento en el sentido del esfuerzo se ve acom-pañado de una reducción de la sección transversal. La defor-mación transversal está relacionada con la defonnación longi-tudinal por un factor de proporcionalidad denominado módulode Poisson (J.l) cuyo valor. asimismo. es específico del materialempleado.
dw d Lfl'-w L
donde w es cualquiera de las dos dimensiones de la seccióntransversal.
La variación de resistencia será de la forma:
r-
::~-ªI
III
::J
(' R (J R a R L P p'AdR -'dp, -·dL+ -·elA -'dp ,-·dL --'dA
cip ('L éJA A A A~
En cuanto a la variación relativa de resistencia. será de laforma:
Factor de galga (K)
elRR
d!I
dRR
dR dp dL dA--.-,-R p L A
Suponiendo que la sección del material al que se le aplica elesfuerzo, inicialmente, posee una anchura x y un espesor y:
Cuando el incremento tiende a cero. es decir, se trata de undiICrcncial:
dA- 2'lJ"c'x'v
Las variaciones de temperatura se han de tener muy en cuen-ta a la hora del empleo de galgas extensométricas, ya que poresta causa es posible obtener medidas incorrectas. La resistenciade un material conductor sufre moditicaciones al ser deformado,pero tambien variará si lo hace la temperatura del medio en elque se encuentre. Será necesario, p r tanto, emplear galgasfabricadas con aleacciones quc compensen este efecto no dese-ado dentro del margen de temperaturas de trabajo.
En cuanto a la detccción de las variaciones de resistencia. serealiza normalmente mediante un puente de Wheatstone, sien-do la galga una de sus ramas, obteniéndose de esta forma unatensión proporcional a la variación de resistencia en la galga y.por tanto, a la deformación y el esfuerzo.
4 © ITP-PARANINFO

Atendiendo al tipo de material empleado en su construcción,las galgas pueden ser:
• Galgas metálicas.• Galgas semiconductoras.
Con una única galga, será necesario alinearla en la direcciónprecisa para que las isostáticas de la estructura sometidas aesfuerzos pasasen a través de la parte activa de la galga. Por estarazón se recurre al montaje de varias de ellas en el mismo dis-positivo, obteniéndose así las galgas multiaxiales.
1.7.1.1. Galgas metálicasEl material conductor es metálico de sección circular y está
soportado por una fina lámina de material aislante.
El hilo conductor puede fabricarse mediante Constantan,aleacción de cobre y níquel al 55 % Y45 %, respectivamente.Su factor de galga vale K=2 y posee bajos niveles de deriva tér-mica, lo que le hace idóneo en aplicaciones de medida estáticas.
Otro tipo de material empleado en la construcción de estosdispositivos es el Nicrom, aleacción de níquel (80 %) Ycromo(20 %), el cual ofrece un mayor margen de compensación detemperatura.
En cuanto al material aislante del soporte, en función delmargen de temperatura de trabajo, se suele realizar con nylon,vinilo, polietileno o teflón.
Las galgas extensométricas metálicas de trama pelicular sonlas más empleadas y constan de una película metálica de 20 a 30micras de grosor. Su proceso de fabricación es similar al de loscircuitos impresos y permiten realizar medidas especiales, porejemplo la medida directa de esfuerzos radiales y tangenciales.Poseen las siguientes ventajas frente a las de filamento:
• Optimización en el diseño de la galga.• Reducción de dimensiones.• Mayor superficie de evacuación térmica.• Reducción de la separación entre elemento sensor y galga.
En general, las galgas metálicas poseen una resistencia eléc-trica entre 100 y 5.000 n y su factor de galga está comprendidoentre K=2 para las aleacciones descritas y K=4 para la aleacciónplatino-tungsteno.
1.7.1.2. Galgas semiconduclorasAl igual que las anteriores, están formadas por una lámina de
material aislante encargado de soportar al elemento transductor,que en este caso se trata de un semiconductor (cristal de silicioconvenientemente dopado).
Su funcionamiento se basa en el efecto piezorresistivo ante-riormente descrito (variación de la resistividad del material enfunción de las deformaciones). Sus características dependen,principalmente, del nivel de cjopado de la red cristalina, de talforma que cuando éste aumenta se reduce, tanto el factor degalga como la sensibilidad térmica, y aumenta la linealidad desu respuesta.
Son de tamaño reducido, fácil instalación, alta sensibilidad(50 o 60 veces mayor que la de las galgas metálicas) y elevadaresistencia a la fatiga.
1.7.1.3. Galgas multiaxia/esTal y como se ha puesto de manifiesto anteriormente, para
que las isostáticas de la estructura bajo prueba pasen a través dela parte activa de la galga y puesto que no siempre se dispone deinformación para alinearla en la dirección adecuada, se recurrena montajes de dos o más elementos en un mismo dispositivo,formando entre sí ángulos de 45, 60, 90 o 120 0. Estos conjun-tos de galgas reciben el nombre de rosetas y sirven para medirdeformaciones en dos o más direcciones. En la figura 1.63 seobserva una roseta de dos elementos a 90 0.
Figura 1.63. Roseta de dos galgas a 90 0.
1.7.2. PiezoeléctricosSu funcionamiento está basado en la propiedad que pre-
sentan determinados materiales cristalinos, tales como elcuarzo, denominada piezoelectricidad. Esta propiedad consis-te en la capacidad que posee el cristal de producir carga eléc-trica bajo la acción de una fuerza aplicada en la direccióncorrecta. Cuando la estructura cristalina se deforma por laacción de la fuerza que actúa sobre ella se produce la polari-zación de las caras sobre las que se ejerce el esfuerzo, que-dando cada una de ellas con una carga eléctrica de distintosigno. Esta deformación que provoca la asimetría en la distri-bución de cargas en la red cristalina, provoca una diferenciade potencial susceptible de medida si se colocan dos placasconductoras en las zonas polarizadas eléctricamente. Estasplacas quedarán cargadas eléctricamente de forma que la ten-sión eléctrica existente entre ellas será proporcional a ladeformación sufrida por el material y, por tanto, a la fuerzaaplicada.
La sensibilidad de un cristal al efecto piezoeléctrico depen-de de su geometría y de la dirección en la que se aplique elesfuerzo.
Se utilizan principalmente en la medida de fuerzas y defor-maciones. En la figura 1.64 se observa el esquema básico deuna célula de carga construida mediante un material piezo-eléctrico.
La carga electrostática acumulada y, como consecuencia, ladiferencia de potencial tienden a disminuir con el tiempo, porlo que son adecuados para medidas de tipo dinámico. Si lafuerza a medir no varía (estática) o sus variaciones son lentas,este método de medida resulta inadecuado. En la figura 1.65se representa la respuesta de un cristal piezoeléctrico ante unescalón.
© ITP-PARANINFO

1
FUERZA
~
TENSiÓN
Figura 1.64. Célula de carga básica mediante material piezoeléctrico.
(Kg)Fuerza
(V)Tensión
33 ,
'-t
Figura 1.65. Respuesta de un cristal piezoeléctrico ante un escalón.
1.7.3. CapacitivosTal y como se puso de manifiesto en el apartado correspon-
dicntc a mcdida de desplazamientos, basan su funcionamientoen la variación de la capacidad de un condensador al actuarsobre él la magnitud física que se desea medir.
La capacidad del condensador depende del dieléctrico emple-ado y de su geometría. La modificación de cualquiera de los dos(o ambos) dará lugar a una variación de la capacidad que depen-derá de la causa que ha originado dicha variación. En la figura1.66 se muestra una célula de carga construida para la medida defuer;:as.
FUERZA
1.8. Transductores de aceleraciónSegún las leyes de la dinámica. la aceleración de un cuerpo
depende de la fuer;:a aplicada sobre él ) de la masa del mismo.siempre que esta última sea constante.
/- = 1// . (/
donde: • F es la fuerza en newtons (N).• 111 es la masa en Kg.• a es la aceleración en m/s2.
Por otra parte el despla;:amiento está relacionado con la velo-cidad por medio de su derivada. Asimismo la velocidad estárelacionada con la aceleración por su derivada. La aceleraciónes, por tanto. la derivada segunda del desplazamielllo con res-pecto al tiempo.
dI' )(/ --dII (/
{ \
dI
De las anteriores relaciones se deduce que un transductor deaceleración estará compuesto de:
Una masa denominada lIlasa sísmica sometida a la acelc-ración a medir. la cual. como consecuencia de la inerciaque en ella se provoca por la variación de velocidad. pro-duce una fueral o desplazamiento relativos susceptiblesde medida.Un elemento transductor de fuerza o desplazamicntoencargado de generar la correspondiente señal eléctrica.
El dcsplazamiento o el esfuerm medido. para una masa sís-mica de valor constante. será proporcional a la acclcración.
Si la medida de la aceleración se real iza a través dc la fuerza.se utilizarán transductores piemeléctricos y piezorresistivos. Siel valor de la aceleración se prctende (Ibtener a través del des-plazamiento se utilizarán transductores potenciométricos cinductivos.
1.9. Transductores de corrientede efecto Hall
Aunque es posiblc la medida de la intcnsidad de corrienteeléctrica por otros métodos (shunt. tran. formador de intensidad.etc.). en este apartado se tratarán únicamente aquellos dispositi-vos basados en el efecto Hall. al ser lus más empleados comosensores de corriente.
Figura 1.66. Célula para medida de fuerzas por efecto capacitivo.
CAPACIDAD
Su principio de funcionamiento (figura 1.67) es el siguiente:Cuando una intensidad de corriente eléctrica (le) circula a tra\ ésde un elemento semiconductor (e1cmelllo Hall) y éste se somctea la acción de un campo magnético (B) externo, perpendicular ala trayectoria de las cargas que originan dicha intensidad decorriente. éstas son desviadas por las líneas de fuerza del campomagnético (fuerza dc Lorent;:). Se producen entonces acumula-ciones anómalas de carga cn determinadas zonas de dicho con-ductor. Tales acumulaciones dc carga dan lugar a una diferenciadc potcncial perpendicular a la dirección de la corriente y alcampo magnético aplicado, dcnominada tensión o d.d.p. Hall.Dicho potencial es proporcional a la inducción magnética y a laintensidad de corriente que atraviesa el elemento.
© ITP-PARANlNFO

-B ~
La tensión Hall dependerá de la distancia entre cargas, esdecir, de la anchura de la lámina semiconductora:
VH = E·d = v·B·d
En la figura 1.68 se representa gráficamente la tensión Hallen función de la inducción magnética (B). Se puede observarque la tensión Hall invierte su polaridad cuando la inducciónmagnética cambia de sentido.
1
donde K¡ es un parámetro del dispositivo proporcionado por elfabricante y expresado en voltios.
De esta forma, conocida la intensidad de corriente nominalque es un dato más ofrecido por el fabricante, para una deter-minada intensidad de corriente (1) a detectar, se puede saber latensión a la salida del detector y con ello, según el rango devariación de tensión necesaria, se colocará a la salida unamplificador u otro.
La sensibilidad de estos dispositivos suele ser de unospocos mV/mT. Si la señal de salida es senoidal y se desea con-tinua, basta con colocar un rectificador de precisión en la sali-da del dispositivo que realice las funciones de rectificación yamplificación.
donde: • VH es la tensión Hall inducida (V).• B es la inducción magnética (T).• le es la corriente de control que atraviesa el elemento.• K es el coeficiente de sensibilidad del elemento.• Vo es la tensión de OFFSET.
El fabricante suele indicar la manera más cómoda de obtenerla tensión de salida del detector, la cual es función de la inten-sidad detectada y de la intensidad nomjnal del propio elemento:
1V = K . deleClllda
H ) 1lIominal
La perturbación del campo magnético se produce cuando elconductor por el que circula la intensidad de corriente a medir sepasa por el entrehierro. Se obtiene así una señal de tensión pro-porcional y de la misma forma de onda que la intensidad que cir-cula por el conductor. Si en lugar de pasar una vez el conductorpor el entrehierro pasa dos veces, la amplitud de la señal de sali-da será aproximadamente el doble, para una mjsma intensidadde corriente (1), ya que la influencia del conductor sobre elcampo magnético será el doble.
El valor de la tensión Hall será de la forma:
Tensiónde Hall
VH
x><
xÁ
1 Il 1+1'++++++++-1 I I II1 1+.X X '-\ X X
IF." .X " ~
X 8<:--~x',.
IcFigura 1.67. Principio de funcionamiento del efecto Hall.
d
La fuerza que sufren las cargas a causa de la inducciónmagnética ( F
II1= q . ~ x iJ) será de la misma dirección y senti-
do opuesto a la que cree el cam¡Jo eléctrico originado por laseparación de las cargas ( FE = q .E). Las cargas acumuladas enlos extremos del conductor aumentarán con el tiempo, al igualque el campo eléctrico, hasta que las fuerzas eléctrica y magné-tica posean el mismo módulo. En este momento las cargas no sedesviarán y el valor del campo eléctrico (E) permanecerá cons-tante, cumpliéndose:
q·v·B=q·E = E=v'B
Figura 1.68. Tensión Hall en función de la inducción magnética.1.10. El aml!!!ficador o~eracional
Figura 1.69. Medida de intensidad de corriente por efecto Hall.
Una variación en el campo magnético provocará otra en latensión Hall, razón por la que este tipo de transductores se pue-den emplear en la medida de posición, donde el objeto que semueve será el encargado de perturbar la acción del campomagnético.
Una de las aplicaciones más usuales de este fenómeno está enla medida de intensidad de corriente eléctrica (figura 1.69).
Circuitomagnético
avo
a+vcc
[>a
a
a-vccFigura 1.70. Símbolo del A.O.
v
El amplificador operacional data de la década de los cua-renta y su desarrollo está relacionado con los calculadoresanalógicos.
Recibe el calificativo de operacional por ser capaz de resol-ver determinadas "operaciones" matemáticas tales comosuma, resta, diferenciación e integración, todas ellas opera-ciones lineales.
Es un amplificador de alta ganancia, acoplado directamente,al que se le agrega una realimentación para controlar su carac-terística de respuesta. Normalmente se le conoce con el nombrede Cl. lineal básico.
El símbolo del amplificador operacional es el representado enla figura 1.70.
Corriente amedir
© ITP-PARANINFO

1
Posee, por tanto, dos entradas (+ y -), denominadas l/O il/ver-sora (+) e il/versora (-), y una única salida.
La tensión de salida es proporcional a la diferencia de las ten-siones de entrada. de la forma: 1'" = Al' . (1'+ - l' ,), donde Al' es laganancia del amplificador. La entrada inversora recibe estenombre ya que la tensión de salida v" invierte su signo respectoa la señal presente en dicha entrada. La otra entrada se denomi-na no inversora ya que da lugar a una tensión de salida que man-tiene el signo de la señal presente en esa entrada.
Las características básicas de un amplificador operacionalideal son las siguientes:
Su ganancia de tensión ha de ser infinita: Al' = oo.
Su impedancia de entrada debe ser infinita, para cualquie-ra de sus dos entradas, con el fin de que el amplificador nocargue al circuito que proporciona la tensión a amplificar:Z/ = Z¡' = Z¡= oo.
Su impedancia de salida ha de ser nula. para que la tensiónde salida no se vea inlluenciada por la carga que el circui-to soporte: Z" = O.
Su ancho de banda debe abarcar desde la tensión continuahasta las más altas frecuencias utilizables. con el fin de nointroducir ninguna limitación en frecuencia, es decir, ha deser infinito: L'1w = oo.
En la figura 1.71 esuí representada la característica ideal deun operacional. en el que se ha considerado únicamente la limi-tación de la tensión de salida en función de las fuentes de ali-mentación.
-Vcc
Figura 1.71. Característica ideal de un A.O.
Si se emplea un amplificador operacional para conseguir unaetapa amplificadora de tensión se ha de utilizar en /.Ona lineal.siendo necesario dotario externamente de una realimentaciónnegativa. Dicha realimentación se puede alcanzar conectandouna red resistiva entre la salida y la entlada inversora. de formaque la ganancia del conjunto sea finita.
Como el A.O. tiene una ganancia infinita, para que la tensiónde salida no lo sea es necesario que las tensiones en sus entradassean iguales (v +=\' ' ). Por otra parte, Cl)mo las impedancias deentrada del Aa, son infinitas. por ninguno de sus terminales deentrada del Aa, circulará intensidad de ClJll'iente (1+=1 ' =()).
1.11.1. Amplificador inversorEs el representado en la figura I.n..
La realimentación negativa del conjunto se realiza a través dela resistencia Rl' por lo que. en lo que se refiere a las tensionesde entrada. se cumplirá:
Un A,O. no realimentado o con rcalimentación positiva cons-tituye un circuito no lineal. cuya tensión de salida solamentepuede tomar uno de los valores extremos (Yec o - Yce)' Sucampo de aplicación es el de la compalación de tensiones (cono sin histéresis),
--Figura 1.72. Circuito inversor.-
1'+ = \' - O }l' = l' - \'+= O
I
i2 R2
• c:::JR1
o +Vcci1 B [>o • c:::J .• •Vi . o•
V1V2
O -Vcc
1.11. Circuitos acondicionadorescon amplificadoresoperacionales
A.O.ldeal J A.O. Real (741) JAv ¡ 2105
Z, 1 21M Q
Zo 1 O 2200 Q
&» I ::: 10 MHz
Tabla 1.11
Los amplificadores operaciol/ales reales están constituidospor un circuito complejo con acoplamiento directo de transisto-res y resistencias en una misma pastilla de silicio, formando uncircuito integrado. Sus características se aproximan bastante alas ideales. de fOlll1a que para el análisis de circuitos basados enAa. se podrá utilizar el modelo ideal. En la tabla 1: 11 se obser-van algunas de las características de un modelo comercial fren-te a las ideales.
Evidentemente. un amplificador operacional necesita alimen-tación de tensión continua (figura 1.70). Normalmente se reali-I.a con dos fuentes de tensión (Yee y - Yee) que, aunque no hande ser simétricas respecto al terminal común o masa que es lomás habitual. tienen por objeto delimitar el campo de trabajo delas tensiones en las entradas y salida del amplificador (máximosvalores de tensión posibles).
Tal y como se ha definido el amplificador ideal. para trabajaren /.Ona lineal será necesario que la tensión aplicada en ambasentradas sea la misma (v +=v '). de forma que. al ser infinita laganancia. exista tensión de salida. Si existe diferencia de valoren las tensiones de entrada. la tensión de salida será el máximo(+00) o el mínimo (-00) que el amplificador pueda proporcionar(+Ycc o - Ycc en realidad, respectivamente).
Si v +>v ' . entonces vo= +Ycc-Si v +<v ' . entonces vo= - Ycc-
© ITP-PARANlNFO

1
.. vI v2-v,1
1=1
2=-=--R¡ R2
VI (R2 )v2 =~'R2+ vI = vI' ---¡¡;+ 1
R¡+R2V=V'---
2 I RI
La ganancia del amplificador realimentado vuelve, al igualque en el caso anterior a ser independiente del A.O. En esta oca-sión, la tensión de salida estará en fase con la tensión de entra-da. Su impedancia de entrada será infinita y la de salida nula.
Al no derivarse corriente alguna por las entradas del opera-cional, ya que su impedancia de entrada es Zi=oo, se obtiene:
En el circuito de la figura 1.74, v2=v I con la particularidad deque la impedancia de entrada del circuito es prácticamente infi-nita, por lo que el generador vIno entrega corriente. Sin embar-go, el terminal de salida se comporta como un generador idealde tensión de valor v2.
1.11.3. Seguidor de tensión
il = i2Combinando las ecuaciones anteriores se obtiene:
• La ganancia del amplificador realimentado depende úni-camente de las resistencias y vale -R/R/, que será muyestable y fácilmente controlable.
• La tensión Vi de entrada del A.O. será nula al ser infinita laganancia del mismo, lo cual implica que ambos termina-les de entrada del A.O. están al mismo potencial y paraeste circuito el punto B estará conectado a una tensiónnula y se comportará como si estuviese unido a masa (encortocircuito), pero no circulará corriente. Este hecho seconoce con el nombre de principio de la masa virtual.
• La impedancia de entrada del amplificador realimentadoserá R I Yla impedancia de salida será prácticamente nula.
• Si se sustituyen RI y R2 por dos impedancias cualesquie-ra Z / y Z2 se puede generalizar, para señales senoidales, de -la forma:
De este resultado y del propio circuito se deducen las siguien-tes conclusiones:
Si se aplica a la entrada una tensión Vi se establecerán lascorrientes i/ e i2, las cuales serán de la forma:
Por otra parte, puesto que en el A. O. su impedancia de entra-da es Zi=oo, no se va a derivar ninguna corriente desde el nudoB hacia la entrada inversora, con lo cual:
22v =--'V2 2 ]
I
El concepto es ampliable a otro tipo de señales utilizandoel tratamiento adecuado.
o+Vcc
I [>,Vi i
. o,o,
V2Vl o-Vcc
1.11.2. Amplificador no inversor - -Figura 1.74. Seguidor de tensión.
- -Figura 1.73. Amplificador no inversor.
Se requiere que el amplificador operacional tenga entradadiferencial. Su circuito está representado en la figura 1.73.
i2 R2
rl!- c:::J- -I
Es un circuito cuya tensión de salida es proporcional a la dife-rencia de las tensiones de entrada.
• o Va
R2
c:::JARlc:::J .Vl o
1.11.4. Amplificador diferencial
• o~
~il O B [>0 +Vcc
_ ? v;j ,Vl o -Vcc
Puesto que el amplificador operacional posee realimentaciónnegativa se cumple:
v=O=v=vI I B
RlV2'0 c:::J
B
o-VccR2
c:::J J.Las intensidades de corriente valdrán: Figura 1.75. Amplificador diferencial (1).
© ITP-PARANlNFO

Analizando el amplificador diferencial de la figura 1,75:
1'1 I'/i I'/i 1'"
RI R2
Despejando la tensión de salida en función de las tensionesde entrada y de los componentes del circuito, se obtiene:
La figura 1.77 muestra un amplificador diferencial de eleva-da impedancia de entrada por hacer uso de las entradas no inver-soras de amplificadores operacionales.
R2 R1 R1 R2c:::J ..• . c:::J ..• c:::J -. c:::J -- i1 i1 i2 i2
a+Vcc
C> o+Vcc
V1 a [> • o Va
a-vccV2 o a-vcc
Ro--(I'R I
I
La ganancia sólo depende de las resistencias R ¡Y Rz Y el fac-tor de rechazo del modo común del grado de apareamiento delas dos R¡ y las dos Rz'
1l'" \' I (1 1)¡¡;+I'/I' ¡¡;' R
2Figura 1.77. Amplificador diferencial (11I).
Analizando:
\' l'\ I
\'/i 1',
l' \'I I
IIR, R,l' l' l' \'
( I ( I1I RI RI
Como inconveniente se puede citar su baja impedancia deentrada que, además. no es la misma para ambas entradas.
El circuito de la figura 1.76 es, también, un amplificador dife-rencial que utiliza dos operacionales que no precisan ser deentrada diferencial.
El primero de los dos A.O, funciona como inversor de ganan-cia unidad.
l' l'A 1
El segundo A.O. funciona como sumador.
R1,---'-'(v ,vo)R
o,\ -
Despejando la tensión en el punto C:
RI + R2\'c ---'\'
R,
Por otra péU1e: I,~_I'(I~)RI R
I
\' \' F \'n (/ ~ (1, --- ----
R, R2
Sustituyendo en la expresión anterior el valor de ve:
R1 R3c:::J c:::J
R1 O+Vcc
V1 o c:::J . C> R2 o +Vcc
c:::J C> • o Va
DR4
O-Vcc
O R5
o-Vcc
R2 -V2 o c:::J -Figura 1.76. Amplificador diferencial (11).
Combinando las ecuaciones anteriores se obtiene la expre-sión de la tensión de salida:
Igualando ambas expresiones de iz:
\' R ,+ R2 RI +R2 \(1
'1') \'')"
RI'R21Ro RI'R2
RI + R2'(\'1 \'0 )l' -
(1 RI
Las impedancias de entrada también son bajas: R¡ y Rz res-pectivamente.
o
Por tanto, la tensión de salida es:
RI I R,---- '(1' \'2)R
II
© ITP-PARANlNFO

VA
R1
R2
B
i4 t n R2
~ oVB
Figura 1.80.
V2 0-
(2· R )v -v = 1+ __ 2 ·(v -v)
A B R I 2I
La tensión de salida del circuito es, por tanto, de la forma:
+VI = VI = VI
v2+ = v2- = v2i4=is=ió
. vB- v214=---
R2
V1
o+VccI
La suma del primer y último término ha de ser el doble deltérmino central:
vB vBV --=--v
A 2 2 o
R3
IO-Vcc
Figura 1.78. Amplificador de Instrumentación.
V2
V1 o
El amplificador operacional A3 forma parte de un amplifica-dor diferencial (figura 1.79) cuya impedancia de entrada es baja,el cual se analiza a continuación:
El factor de rechazo del modo común (C.M.R.R.) dependedel grado de apareamiento de las resistencias iguales, con laconsiguiente dificultad para obtener ganancias variables.
El circuito de la figura 1.78, recibe el nombre de amplifica-dor de instrumentación y prácticamente elimina los inconve-nientes de los anteriores, aunque el rechazo del modo comúnsigue dependiendo del grado de apareamiento de las resistenciasdel mismo valor.
R3 R3A e •.c::J-.-1 c::J ~]
i1 '2
~j o Ve
e -VccR3 R3
B e __ c:::J . c:::J J.i3
Para conseguir ganancia variable sin afectar al factor derechazo del modo común la única solución viable es la de susti-tuir la resistencia R1 por otra de valor ajustable, ya que el CMRRno depende de su valor, pero sí la ganancia del circuito.
Figura 1.79. 1.11.5. Circuito integradorEl resto del circuito (figura 1.80) se encarga de proporcionar
una impedancia elevada para cada uno de los terminales deentrada.
Es una de las aplicaciones más clásicas del A.G. (figura 1.81)en la que la tensión de salida es proporcional a la integral de latensión de entrada. '
© ITP-PARANINFO

En el caso de que la tensión de entrada sea constante. la desalida será una rampa y para su análisis no es necesaria la utili-zación de integrab,.
Si a la entrada de un circuito integrador se aplica una ondacuadrada. el resultado a la salida es el indicado en la figura 1.83.
o•Vl
-R
c:J
-
C
I Io +Vcc
C>o-Vcc
• o•V2-
I j" I\'..1 e IC'( 1
2 '1',1 2 {' I j'- i .·dl -- \' ·dle. ( R·e 1
Figura 1.81. Circuito integrador (l).Vl
1En efecto:
I {" I- 1'(1
C·I j'-- l' ·dl
R'C I
Figura 1.82. Circuito integrador (11).
En la práctica es preciso establecer algLII1sistema que permi-ta introducir las condiciones iniciales, así como poner una resis-tencia de elevado valor en paralelo con el condensador para evi-tar la saturación del A.O .. en ausencia de señal.
El caso más típico es aquél en el que, en el instante inicial1=0. la tensión de salida v1=O. lo que se consigue mediante la uti·linlción de un intelTuptor en paralelo con el condensador que seabre en el instante de tiempo 1=0.
Otra forma de realizar un integrador es la de la figura 1.82.
..(
R•.. c::::JC O +Vcc
•.. I I C> • o•V2
O -Vcc- -
Figura 1.83. Respuesta de un integrador.\ una señal cuadrada,
-
V2 •
Vl
o•
1.11.6. Circuito diferenciadorCon esta configuración (figura 1.8..J.) se obtiene a la salida una
señal proporcional a la derivada respecto al tiempo de la tensiónde entrada.
V2
o•
-
2R 2R
c::=:J c::=:J- o +VccB C>2R
Ao c::=:J•
o-Vcc2R
Vl c::=:J=C
, iC- -En este caso no existe inversión de signo y por ese motivo se
le denomina integrador positivo. La expresión de la tensión desalida se obtiene de la siguiente forma:
\' - l' \' \'1 . I ~ ,1le ---+---
2·R 2·R
Figura 1.84. Circuito difere ciador,
Este circuito tiene únicamente intert's teórico ya que en lapráctica presenta problemas de inestabilidad y ruido. En algunoscasos se utilizan versiones modificadas del mismo .
dI'R'C-I
dIi·R
dI'C-I
dI
l', 1':21'/1 ---·2·R
..J.·R 2\'1 + l'~ 2· VA
2·R
Pero:
con lo que:
l' l'\ /i 2 1.11.7. Circuito proporcional-integral
\'1 + \'2- V2Ie ~--2-'-R--
2·R
Como su nombre indica, se trata de una etapa híbrida entre elinversor y el integrador (figura 1.85). Resulta de especial interésen sistemas de regulación.
© ITP·PARANlNFO

El análisis del circuito será el que sigue: VRa -i-----
t Va
+Vcc
-Vcc -+-----'
[>vcc
VR o-~oVa
Vi 0- +
6_Vcc
Figura 1.87. Comparador de nivel
Ambas tensiones (V R YVi)' para un correcto funcionamiento,han de estar comprendidas en el rango de las tensiones de ali-mentación (+Vcc y-V cc)'
Un amplificador operacional en lazo abierto (sin realimenta-ción), al ser su ganancia de tensión infinita, se comporta comoun comparador de las tensiones de entrada. Su configuración yfunción de transferencia están representadas en la figura 1.87,donde VR es la tensión de referencia del comparador, la cual setrata de una tensión continua. En cuanto a Vi se trata de la ten-sión de entrada.
1.11.8.1. Comparador de niveleR2
6 -Vcc
Figura 1.85. Circuito proporcional-integral.-
~O~i;;'~fi'dt)o 2 e
En la figura 1.86 ~tá representada la tensión de salida,correspondiente a una entrada en forma de escalones de tensión.
Figura 1.86. Respuesta del proporcional integral a un determinada Vi'
1.11.8. Circuitos comparadoresde tensión
Vi.o
Vl ° G> • D ° Vol
o-vc~ • orOA
:
V
"' Vo
V20-- +
-Vcc
Figura 1.88. Comparador de ventana,
Para un correcto funcionamiento del circuito se ha de cumplirla relación: +Vcc >V2 >VI > -Vcc"
Ninguno de los dos amplificadores operacionales posee rea-limentación, por lo que se comportarán como comparadores denivel. En función de Vi existirán, por tanto, tres tramos de fun-cionamiento.
• -VCC:":: Vi:":: VI
En estas circunstancias en Al ,V1+ >V1-, por lo queVol =+V cc . El diodo D está en estado de conducción (ON) y lasituación en A2 será:
Vi = Vcc - Vy ~ + Vcc} _ +
+ V2 > V2 = Vo = - VccV2 = V2
• VI:":: vi:":: V2
Los valores de tensión en las entradas de A I son tales quehacen que Vol= -Vcc- De esta forma el diodo D no conduce(OFF), por lo que en A2 las tensiones serán de la forma:
Se trata de un circuito capaz de detectar si la tensión de entra-da se encuentra dentro de un intervalo (ventana) de valores. Parasu implementación (figura 1.88) se requieren dos amplificado-res operacionales, un diodo y una resistencia.
1.11.8.2. Comparador de ventana
•. t
•. t
v = v() máx
Si v -> v +
Si v < v +
o -
Vi ,
o~
Los valores de la tensión de alimentación (±Vcc) limitantanto los valores de tensión de entrada como de salida.
La impedancia de cada una de las entradas es infinita ya quepor ninguna de ellas se deriva intensidad de corriente (1+=1- =0).
A continuación se realizará un estudio de los diferentes com-paradores basados en amplificadores operacionales, tanto conhistéresis como sin ella.
Partiendo de las características generales de un amplificadoroperacional (tabla 1.11) Y de su característica de transferencia(figura 1.71), se puede decir que un amplificador operacional sinrealimentar (en lazo abierto) se comportará como un compara-dor de tensión, en el que:
© ITP-PARANINFO

Para que la tensión de "dida ,ea v" =+ Vcc es necesario queV + >V - . e~ decir:
En el momento en que v¡ $; V¡u . la tl'n~ión de salida pa~ará atomar el valor v" =- Vcc-
\'Para que la ten~ión de ~al ida sea v" = . Vcc es necesario que
V+ <V - _e~ decir: I'¡ >V¡s'
En el momento en que v¡ $; ViS _ la tensión de sal ida pasará aser v" =+V("(""
En la figura 1.95 se encuentra representada la función detransferencia del comrarador. donde ~e puede comprobar queV¡s<V¡fI"
---l •..~"'r--'--,+ Vcc
.l Va
1 ·Vcc
ViS
...
ViS•. Vi
v,,= -Vcc
El valor de la tensión en la borna no inversora es ahora:
v
Figura 1.95. Función de transferencia del comparador inversor asimétrico.Para que la tensión de salida sea v" =- Vcc es necesario que
V+ <V - _es decir:
La tensión de histéresis valdrá:
?·R1-_·VR
1• R~ ((
1.11.8.6. Comparador no ;nvesor as;métr;cocon h;stéres;s
V,\
En el momento en que v¡ ~V¡S . la ten~ión de salida pasará aser v" =+ Vcc-
En la figura 1.97 ~e encuentra representada la función detransferencia del comrarador. donde se ruede comprobar queV¡s>V¡/I'
.l VaEl circuito es el representado en la figura 1.96, donde seonserva que se trata de un comrarador simétrico al cual se leaplica una tensión de referencia en la borna inversora (en lugarde conectaria a masa).
+Vcc
ViS ViS•. Vi
VR O
O+Vcc
C> O Va
~__ •....•.-'--._.J -V cc
Figura 1.97. Función de transferencia del comparadorno inversor asimétrico.
Figura 1.96. Comparador no inversor asimétrico con histéresis.
RlVi O c:::::J
O-Vcc
R2 La tensión de histéresis será:
\1 \'IN 1.\ R,
La~ tensione~ en las bornas del amplificador operacionalvalen:
FVHl' l', " R2 1\'"
R¡ ,R2
A continuación sc ha de suponer un valor de tensión de sali-da (+ Vcc o -Vee) y determinar el valor de la tensión de entradapara la cual el circuito cambia de estado.
1.12. Acondicionadores paratransductores resistivos
Uno de los grupo~ más numerosos de transductores son aqué-llos que proporcionan una resistencia variable en respuesta a unamagnitud física. A partir de las variaciones de resistencia se hande obtener tensiones eléctricas dentro de un determinado mar-gen útil para scr tratada~ en rosteriores etapas de tratamiento dela señal eléctrica.
El valor de la tensión en la norna no inversora será:
Cualquiera que sea el circuito de medida de resistencias nece·sitará alimentación eléctrica rara obtener una señal de salida. Lamagnitud de dicha alimentación. de la que derende directamen-
© ITp·PARANlNFO

te la amplitud de la señal de salida, está limüada por el tipo detransductor tratado.
Para la medida de resistencias es posible utilizar diferentesmétodos, clasificados principalmente en:
• Deflexión: Se mide la d.d.p. en bomes de la resistencia amedir, la corriente a través de ella o ambas cosas simultá-neamente.
11R1./? ~2 12
~- '• o Vs O
~__ R4~ /R3=RO{1+'1
v
Figura 1.99. Puente de Wheatsone funcionando por deflexión.
Si se desea que para 0=0 el puente esté equilibrado se ha decumplir que:
k~.!!.J.~ RzR4 Ro
La tensión de salida (Vs) es de la forma:
La salida del puente se puede medir tanto por comparacióncomo por deflexión. En el primer caso se ha de ajustar unaresistencia hasta obtener el equilibrio y en el segundo se mideel desequilibrio.
El método habitual de obtener una señal eléctrica emplean-do un puente de Wheatstone es el de deflexión, en el que enlugar de realizar ajustes en una de las resistencias para esta-blecer el equilibrio en el puente se mide la diferencia de ten-sión entre ambas ramas o la con-iente a través de un dispositi-vo colocado en el brazo central.
En la figura 1.99 se representa un puente de Wheatstone,siendo o el desequilibrio del mismo.
VR ~__ 0_' _·Rx V - V
xp
o Rp
.--I
OR' G•
Figura 1.98. Divisor de tensión.
v
• Comparación: Se basan en los puentes de medida.
En la medida por deflexión, una técnica empleada para medirresistores de elevado valor óhmico consiste en la utilización deun divisor de tensión (figura 1.98), donde suponiendo que laresistencia del voltímetro es mucho mayor que Rx' se tiene:
Esta se aplica a transd.uctores de resistencia variable cuyocomportamiento no sea lineal.
Para medir cambios pequeños de resistencia se suele dis-poner de otro divisor de tensión en paralelo con el que tieneincorporado el transductor. El circuito se diseña de forma queen reposo (equilibrio) ambos divisores proporcionen la mismatensión, por lo que bastará medir la diferencia entre la salidade ambos para obtener una señal que depende de la variaciónde resistencia del transductor. Esta configuración se conocecon el nombre de puente de Wheatstone.
Se puede incrementar la sensibilidad del puente si se dis-ponen varios transductores en los brazos adecuados delmismo.
En el caso de que &<k+l, la tensión de salida será proporcio-nal únicamente a los cambios de resistencia.
Si el puente se alimenta a corriente constante l, la tensión desalida es entonces de la forma:
V _l. k·os - 2. (k + 1) + o
Si &<2(k+l), la tensión de salida será proporcional a los cam-bios de resistencia.
© ITP-PARANlNFO

Ejemplos Resueltos[TI Se desea controlar la temperatura ambiente de un inverna-dero, la cual puede variar entre O ° Y 50°C. Para medir dichatemperatura se utiliza una resistencia PT I00 montada sobre unpuente de Wheatstone tal y como se indica en la figura 1.100.Determinar el valor de RI, R." Y RIO de forma que la tensión desalida Vo pueda variar lineal mente con la temperatura entre OV(ÜoC) y IOV (50°C).
R9o +Vcc
c::J . D>- • o Va
V1 O
O -Vcc
Figura 1.101.
R10
A continuación se determinará la función de cada uno de losampl ificadores operacionales.
El circuito formado por U2, Rl) y R 10 (figura 1.10 1) se trata deun amplificador no inversor.
R10
c:::Jo +Vcc
G>.ovoO-Vcc
R9
~._ c:::J ¡
VVl¿.vee
-
R5
c:::J
-
<;:+Vcc
• B
R~ ~4 R7
·C A'c:::J
R3~ '#RIPT1001 DR8-Zl~1
Figura 1.1OO.Control de temperatura de invernadero.
DATOS: R2=R~=Rs=R7=R9=4K7 Q: R6=Rx=220 KQ;±Vcc =±12V: RPTI(X)(O °C)=IOO Q; RPTI(X)(100 °C)=138,5 Q;Z, == LM336 (Vl.l=2.5V: 11.1llín=3oo J..lA; IZ01:í,=IO mAJo
SOLUCIÓN:
Para los posteriores cálculos, tal y como se puede comprobar,la carga a la que está sometida el puente mediante la primeraetapa amplificadora es despreciable.
El circuito formado por U I Y sus resistencias asociadas (figu-ra 1.102) es un amplificador diferencial cuya misión es la deamplificar la tensión de salida del puente.
VVI VI __ A_·RxR7+ Rx
Dado que a una temperatura de O °C la tensión de salida delcircuito ha de ser nula, la diferencia de tensiones entre V A Y Vetambién lo ha de ser. lo que indica que a dicha temperatura elpuente ha de estar equilibrado, condición de la que se obtiene elvalor de R,.
R2· RoR2· Ro = R." . R~ ~ R." = -- = 100 Q
R.!,
donde Ro es la resistencia de la PT I00 a O 0C.
Se determinarán ahora, con el puente en equilibrio, los valo-res límites de la resistencia RI.
Los valores mínimos y máximos de la intensidad de corrien-te por dicha resistencia son:
iV~
'RII/I/I/"" 'ZI/I/I/ + 2· -- = 1.34 mAR2 + R,
Vz'Rlmm"" 'Zm", + 2· --- = 11,04 lilA
R2 + R."El intervalo de valores de RI se obtiene de la forma:
R6
c::JR5
o +Vcc
ve o c::J .b o V1
R7
VA o c::J o -Vcc.O R8
-Figura 1.102.
Puesto que Rs=R7 y Ró=Rw el comportamiento es diferencialy de la forma:
RVI ~.(V\ V() '+6,8·(V4 Ve)
RsLa función global de ambos operacionales es:
V (1 RIO).~.(\, V)" R R \ e
9 S
En este caso, con el fin de evitar el calentamiento sistemáti-co del zener y, puesto que el desequilibrio del puente hará que laintensidad de corriente por el mismo sea menor que la de equi-librio, se tomará un valor de resistencia próximo al límite supe-rior. En este caso se ha optado por RI=4,7K Q.
Teniendo en cuenta que la PT I00 es prácticamente lineal, sucoeficiente de temperatura se determina de la forma:
RI(X) Roex 0,00385 Q I(Q De)100'Ro
© /TP-PARANINFO

PZllllÍX= VZ1 • 'ZlIIlÍX -7 'ZlIIlÍX =
El valor de la resistencia PT I00 a la temperatura de 50°C sedetermina de la forma:
R=Ro·(I+CH) = Rso = 100·(1+0,00385·50) = 119,25 Q
donde t es la temperatura expresada en grados centígrados.
La tensión de salida del puente de Wheatstone a 50°C,teniendo en cuenta que R7 y Rg no cargan al puente, es:
(R2 R4)VA - Ve = VZ1' --- - --- = 9,778 mV
R2+ R3 R4+ Rso
Si la tensión de salida Vo a 50°C ha de ser de 10 V se cono-cen todos los datos para determinar el valor de Rlo'
Vo = (I+~). R6. (VA-Ve) ~ RIO = (~ Rs -1)·R9 = 97989,29Q
R9 Rs VA-Ve R6
Debido a la precisión que requiere este tipo de montaje serecomienda que todos los componentes sean de precisión. Losamplificadores operacionales pueden ser del tipo OP07. Laresistencia RJO se puede realizar mediante una fija de 86 KQ enserie con otra variable multivuelta de 20 KQ.
mMediante el circuito de la figura 1.103 se pretende diseñarel acondicionador, para una resistencia PTloo, que cumpla lassiguientes especificaciones:
• El circuito acondicionador debe responder según la curvaindicada en la figura 1.104.
• La potencia del sensor no debe sobrepasar 0,6m W.
DATOS: Sensor de temperatura PT I00: RPT I00(0°C)=100 Q;u=0,00385 QJ(oC)-I; ZI=LM336: Vz=2,5 V; Izmín=3oo /lA;Pzmáx=25 mW; ±Vcc=±15 V; QI= BC557B; UI=U2=TL082;01=D2=IN4148; Rs=R6=1O KQ.
R2 R7 Ra
. c::J o+Vee R4 I c::J . c::J '1O+Vcc c::J •••
+veeo-~ ~Ql ~ C~v=l_~ ~ ovo¡ l:i:: 111 - . ,U2A V2 ]1 V--Vcc I VPT R6
21 ~ lo ,. . ¿.vee V~ c::J~ I +vec¡_
- ~''''' J¿, G- U1B.. ....02 1-NM-
PT100
Figura 1.103. Circuito acondicionador de PT100 (11).
constante ya que, al ser la impedancia de entrada del A.O. U2Aprácticamente infinita, no se deriva corriente por la borna noinversora del mismo.
El A.O. U I B' actúa como masa flotante para proporcionar eladecuado retorno de lo a la masa del circuito acondicionador yaislando el sensor del resto de la masa del montaje. En cuanto alos diodos DI y 02 se encargan de evitar las perturbaciones o rui-dos eléctricos que pudieran existir en el entorno.
El resto de los amplificadores operacionales se encargan deamplificar la señal proporcionada por el sensor y proporcionar-le el nivel correcto para adecuarla a la curva de respuesta de lafigura l. 104
En primer lugar se determinará el valor máximo de la resis-tencia RI para que el diodo Z, pueda funcionar correctamente.
Vee-Vz1 = 4166 KQ'ZlIIín '
A paItir de la potencia máxima admisible por el diodo zenerse obtiene su máxima intensidad de corriente:
Pz .~l1Ill.\ = 10 mAVZ1
El valor mínimo de RI se determina de la fonna:
V -Vee 21 = 125 KQ, 'Zmáx
Puesto que por la entrada no inversora del amplificador ope-racional a la que está conectada el diodo zener no se derivacorriente alguna, se tomará un valor de resistencia próximo almáximo, por ejemplo: R,=33 KQ.
Si la potencia disipada por el sensor no ha de sobrepasar0,6mW, se ha de cumplir que:
PpTIOO= '02. RpTlOO$. 0,6 mW
Puesto que la intensidad que lo atraviesa es constante, lamáxima disipación de potencia se obtiene cuando la resistenciade la PT l00 es la mayor posible, lo cual ocurre a la mayor tem-peratura de funcionamiento, es decir, a 100°C:
RpT100 = Ro' (I+u·t) --1 RpTlOO (100°C) = Ro . (1+u·loo)= 138,5 Q
La intensidad de comente lo tendrá por límite superior:
SOLUCIÓN:
-15
lVO(V)
100
Figura 1.104. Curva de respuesta.
•. t(OC)
Fijando Io=1,84mA, se obtiene:
V - VRz = CC 21 ~ 6 8 KQ
/0 '
La tensión en la borna no inversora de UZA'denominada VPT
será de la forma:
donde t es la temperatura del sensor en 0c.La tensión de salida, en función de Vz y VR será de la forma:
El amplificador operacional U lA'junto con los componentesasociados (QI' ZI' RI y Rz) constituyen una fuente de corrienteconstante que alimenta al sensor (PT I00) con una intensidad
© ITP-PARANINFO

220V
o• KI
o .• Vcc
1 ..•01
o t Vt:c
Figura 1.106. Circuito acondicionador con lM335.
DR'~i VC( ~ 01. 01 •••.
Rl O CR2 R3 o+Vcc ~1 8>V8 RlO
V2· c:::::J. 8> - U1B • c:::::JR5 U1A • c:::::J.
Vl • c:::::J . VA R8R9
[ll~J [~;;J R6D - c:::::J
o-Vcc
Figura 1.105. Tensión de referencia.-OVR
Z2 ~
En cuanto a la tensión de rel"crencia. se obtendrá mediante unzener de 2.5 Y (LM336) ) una resistencia (figura 1.1(5). Elvalor de dicha resistencia ha de ser talquc garantice. en el pcorcaso. que el Lener pueda mantener su 1/1ll1lly que no disipe unapotencia superior a la máxima.
[I] Se desea diseñar un sistema (figura 1.1(6) que ponga enmarcha un ventilador (motor) cuando 1.1diferencia de tempera-tura entre dos puntos (t¡-t2) sea superiOl a II °e y que se desco-necte cuando dicha diferencia sea inkrior a 6.2 0e. Se utilí/.acomo transductor de temperatura el sensor integrado de uniónsemiconductora LM335 (E=IOmY/K). Supóngase que la dik-rencia de temperatura cumple la relaci6n O °Cstl-t2s.+R "e.
294.6
V= (1 +2). (2+2)=~.(V,+V)" R7
2 2 2 - R
Por otra parte. la relaCIón entre Y2 Y YPT es:
v,~(1 + :J v,,~A,' V,.,~A,· ',,. "o' (1 + a· 1I
Sustituyendo:
Á:\ AlV" =~. (V2 + VI) = 2' ,¡VR + A2 . lo' Ro' (1 + ex I)¡
Al AlV" =2 A2 lo' Ro' ex· t +2 . ¡VII +A2 . lo· Rol
Teniendo en cuenta que R,,=R(,= IO KQ Y llamando AJ al pri-mero de los términos:
De la primera igualdad:
De las anteriores eX[Jresiones se obtiene:
De la segunda. despejando AJ:
De la figura 1.104, se obtiene:
11" = 11/ . (t - lo) )
11) = - 15°C 12 12 18011"(100 °e) - 11)-15 0e¡ ~ 11"=115' (1+15) = liS' 1 +115
111 = 100 + 15 = 115
1
La relación entre las resistencias R, y R~ será:
Fijando R]=JO Kil. se obtiene R.¡=/34,/ KQ. Esta últimase puede implementar mediante una resistencia de precisión de120 KQ Y un potenciómetro de 50 KQ. Se ha de cumplir. por tanto. que:
V !!i'V"(1 ~)'-~'VI\ Rl Nl R" R(¡
Para el correcto funcionamiento como ampl ificador di fc-rencial:
R\' -~.(\, \',1
\ R, '
El primer ampl ilicador operacional (U A ¡) trabaja comoamplificador diferencial. siendo su tensión de salida de la forma:
DATOS: R1= R2= l.5 KQ: R1o= 10 KQ: U¡= OPO'+:Ycc= 12 Y; Q¡= BD137: Sensores de temperatura: LM3Yi:K
1= Relé 12Y/2RO Q.
SOLUCIÓN:20.43
R---=!. A I 13..+ IR 2
J
Igualmellle. la relación entre las resistencias R7 y Rx será:
Fijando R7=IO KQ. sc obtiene R¡¡=/94,3 Kil. Esta últimase puede implementar mediante una resistencia de precisión deIRO KQ y un potenciómetro de 50 KQ.
A partir de las características del sensor:
VI t"'TI} R RV, 1:".T, V \ ~. (/~'. TI 1:".1',) ¡:.'~' (1',- - Rl RJ
T,)
© ITP-PARANlNFO

donde TI YT2 son las temperaturas absolutas en los puntos demedida.
Puesto que se desea trabajar en la escala centígrada de tem-peratura, al ser T = , + 273,15:
R4VA = E· -' (tI - (2)
R3
donde ti y ~ son las temperaturas en grados centígrados de lospuntos de medida.
Según las especificaciones iniciales, la tensión VAserá fun-ción de la diferencia de temperaturas (figura 1.107) y, teniendoen cuenta el valor de la tensión de alimentación, estará com-prendida entre Oy +Vcc (Oy + 12 V).
¡VA
12V
•. tl-t2 (OC)48
Figura 1.107. VA en función de t1-t2•
De la propia gráfica (figura 1.107):
VA~II1'('I-'i> l111~ ~~ 0,25 v/De VA ~ 0,25 . (t 1- (2)
48°e
A partir de ambas expresiones de VAse obtiene:
VA~E.R4'('I-'2») R4 11IR -~-=25
3 R EVA~I11'('I-'2) 3
Fijando R3= 12 KQ se obtiene R4= 300 KQ. De la mismaforma, si se fija Rs= 12 KQ se obtiene R6= 300 KQ.
! VB
+Vcc
- VAoFigura 1.108. Función de transferencia de la báscula (UIR).
Restando ambas expresiones se obtiene la tensión de histé-resls:
La relación entre Rg y R9 será:
Fijando Rs= 10 KQ se obtiene R9=100 KQ.
Despejando VRde cualquiera de las expresiones:
V ·RV ~ iS 9 ~ 25 VR --- ,
Rs r R9
Para fijar esta tensión (VR=VZI) se utilizará un diodo zenerdel tipo LM336, teniendo en cuenta que R7 ha de ser de un valortal que el diodo sea capaz de mantener su IZmín(300 ~A) Y nosupere su PZmáx(lzmáx=IOmA).
Vcc- VZ1 V V____ > R > CC LI = 31,66KQ ¿ R
7¿ 950Q
Iz.",'" - 7 - I"" Zmá.,
Estando el ventilador parado y la diferencia de temperaturasaumentando, cuando ésta iguale o supere 11°C (VA~2,75V), latensión de salida de la báscula será VB=+Vcc' por lo que el tran-sistor QI se saturará, el relé actuará cerrando el contacto y elventilador empezará a funcionar. Si la diferencia de temperatu-ras disminuye, el ventilador dejará de funcionar cuandoVA= l,55V (t 1-~=6,2 °C) ya que el comparador conmutará yVB=OV,con lo que el transistor entrará en zona de corte y el con-tacto del relé se ablirá.
Evidentemente, el ventilador ha de ser de baja potencia paraque el relé no sufra daños. Si se desease una mayor potenciasería necesario adaptar el circuito utilizando contactores.
o Se precisa diseñar un control de temperatura (figura 1.109),con un margen de trabajo entre O°C y 1.000 °C, que utiliza comosensor un termopar tipo K (Cromel-Alumel). Dicho transductorposee un coeficiente Seebeck de valor S=40,8 ~V/ 0e. Para lacompensación de la unión fría se emplea el sensor integradoAD590 que proporciona una intensidad de cOITÍentede 1 ~NK.Determinar RI' R2, R3,R14 Y Rs para que la sensibilidad del sis-tema sea de 10 mV/ 0e.
Figura 1.109. Control de temperatura mediante termopar tipo l/K".
El segundo amplificador operacional constituye una básculano inversora asimétrica con histéresis cuya función de transfe-rencia es la indicada en la figura 1.108. Su misión consiste en ladetección de los límites superior e inferior en la diferencia detemperaturas, con el fin de activar (VB=Vcc) o no (VB=O)elmotor. Los valores de tensión de entrada (VA) para los cuales elcircuito ha de conmutar serán:
VR(RS+R9)- Vcc'Rs ~ V (6 2°C)~ I 55VV¡n = A"R9
V (R + R )/1 S 9 ~VA(II0C)~2,75V
R9
© ITP-PARANtNFO
RVR0---c:::Jr-------.,:-0--: 1~IAlOK, ---- L.......... -
: : R2 I_ ¡ AD590 ¡ c:::J, '-<Cromel irl ; la f--c:::::J
tm10r!-: R6
Alumel ~ J__J!
-
R3
c:::J
~.VV1
o -Vcc
R4 R5c:::J----C:)--
R7c:::J
• o Va

Si se cumplen e"tas considcracionc". la tensión V 1 será:
Para eliminar el de"plazamicnto de ten"ión se ha introducidoun término quc dcpende dc la lcnsión de rercrencia VI{' A unatcmperatura de O°e (TII=273.15 K). la tcnsión V I ha de "er nula:
~) 1 AJ'S"R1
m, ·S· I'"
El termopar genera una ten"ión proporcional a la diferen-cia de temperatura entre la unión de medida y la ambiente.aplicándo"e é,,¡a a la borna no inversora del amplificador ope-racional U I,\'
DATOS: Termopar tipo K: S=40.8 ¡..¡V/ 0e: Sensor de tempe-ralUra AD590: K= I ¡..¡A/K: R6= I00 KQ: R7= IO KQ: e 1= IOOnF:Amplificadore" operacionales: OP04: VI{=IOV: ±Vcc=±12 y.
VI S'(Tm 7~,)
SOLUCIÓN:
1
Puesto que "e desea una tensión que no dependa de la tem-peratura de la unión flía. la primera etapa amplificadora, ademásde su función propia. ha de ser la encargada de eliminar dichadependencia introduciendo, mediante el sensor AD590, unnuevo desequilibrio igual y de signo contrario a la mencionadadependencia de la temperatura ambiente.
Analizando la primera etapa amplificadora (figura 1.110):
donde tlll es la temperatura del punto de medida expresada engrados centígrados.
El segundo operacional (U Ill) trahaja como ampl ificador noinversor. por lo quc:
( R-) ( N-)V1 I,~· V I ~ ·S·,\·, A,'¡\ 'S"- N I N 1m - 1 m.+ .+
2-1-5.\101/lV/ e-1-0.81-1\'/ e
-\Sd'",
d \11
Fijando A ]=25. se ohtienc que A 1=9.8. Por tanto:
R" ,\ ,
Si R.+=IO KQ. se ohtiene R,=2-l-0 Ki2.
TO'S'[' 'N\'(* I;~)][ 1 • N,' (* ~J] 111
De la primera) la última:
La sensihilidad del sistema se ohlien~ derivando la cxpresiónde V 2 respecto a la temperatura t",.
Del resto de la" condicionc,s sc ohtlene un "i"tcma dc tresecuaciones con tres incógnitas:
T)'(I,RJ.R,) 11 N"K'T'R" R
IR~ Ii R
I"J
1'1 S'(Tm
IJ • l, i...,· I1
Rl R3VR o CJ c:::J
il i3
O ic
R2o +Vcc- AD590 CJ .. [?>•••• i2 . o Vl
V,+ o
o-Vcc
R,
VI VI'1, ---N,
Vii VI'11 ---
RI
VI
Figura 1.110. Etapa amplificadora y de compensación de la unión fría.
El sensor integrado AD590 proporciona una intensidad decorrientc dc la forma: i, = K· T". donde K=J J1AIK.
Sustituyendo en V I el valor de ic y de VI + se obtiene:
De las dos última" se ohtiene:
Para que la tensión V I no dependa de la temperatura de launión fría se ha de cumplir:
R,- \/Ii---To'S'AI
Sustituyendo ahora cn la primcra:
36.61 KQ
() = -.-+-
RI R2 RJ
KS
K
S
S'I\I'N]
K'NI'!?, S·( RJ
. N,)
© ITP-PARANINFO

+Vee o
R3
c::J • o VRi3
R2 R4Vs o ~c::J . c::J ~Ii2 ,4
R1 o +Vee
VA o ~~c::J .bJi1 o Ve
R6 O O -Vee
-Figura 1.112. Etapa acondicionadora.
Sustituyendo el valor de VA Y VB:
R2 R3
r----~--¡-e:::J---o VR
R5 '1 I ic::J' 01 I i R4:1' i t~' I ', ta I
A'"m,' 110'1' - -!O .-[;>?+vee Ltm < !~: U 1 - o Va
Cramel! + IL J +
I
O o -VeeR6
DATOS: ±Vcc=±12 V; Rs=I,5 KQ; R6=1O Q; AmplificadorOperacional: TLC2652.
-
La resistencia R6 y el condensador CI constituyen un filtropaso bajo cuya misión es la de eliminar posibles ruidos e inter-ferencias en los cables del termopar.
Puesto que los valores de resistencia obtenidos no soncomerciales, será necesario introducir elementos ajustables enel circuito.
[I] Para medir la temperatura de un horno se utiliza un termo-par tipo "K" (cromel-alumel) cuyo gradiente tensión-temperatu-ra a 25°C es S=40,44¡.tV/K. Para la compensación de la uniónfría se utilizará un transistor (Q¡) de pequeña señal (BC547B)cuya tensión base emisor se ha ajustado a VF=0,6 V por mediode Ry El coeficiente de temperatura de la unión base emisor escx=-2mVre. Se trata de diseñar el circuito acondicionador (figu-ra 1.111) de forma que la velocidad de cambio de la tensión desalida (Ss) sea de J mVrc y V0(0 °C)=Ov.
Figura 1.111. Circuito de control de temperatura. Para que la compensación sea efectiva se ha de cumplir:
S a RI S-+- ~° = -~ --~ 0,02022R¡ R2 R2 a
SOLUCIÓN:
La d.d.p. generada por el termopar dependerá de la diferenciade temperatura en el punto de medida y en la unión fría. Por estemotivo es necesario emplear técnicas de compensación para quela tensión de salida dependa únicamente de la temperatura en elpunto de medida. Se emplea, en este caso, el transistor Q,.
Las tensiones proporcionadas por los transductores de tem-peratura son de la forma:
Iv~-S·(T -T)~-S'(/ -/)A m a m a
V~V+a'lB F a
donde VF es la tensión a la que se ha calibrado la unión base-emisor que, en este caso, es de 0,6Y.
Analizando ahora la etapa amplificadora formada por VI(figura 1.112):
La tensión de salida, una vez compensada la unión fría, seráde la forma:
(S VF VR)V~R' ./- -o4RIIlRR
I 2 3
Para que la tensión de salida sea nula cuando la temperaturaen el punto de medida sea de ° °c se ha de cumplir la relación:
VF VR R2 VF-+ -~o=R2 R3 R3 VR
Con esta condición, la tensión de salida será:
R4V ~ -·S'Io R¡ 11I
La sensibilidad del sistema se obtiene derivando la expresiónde Vo respecto a la temperatura tm.
© ITP-PARANINFO
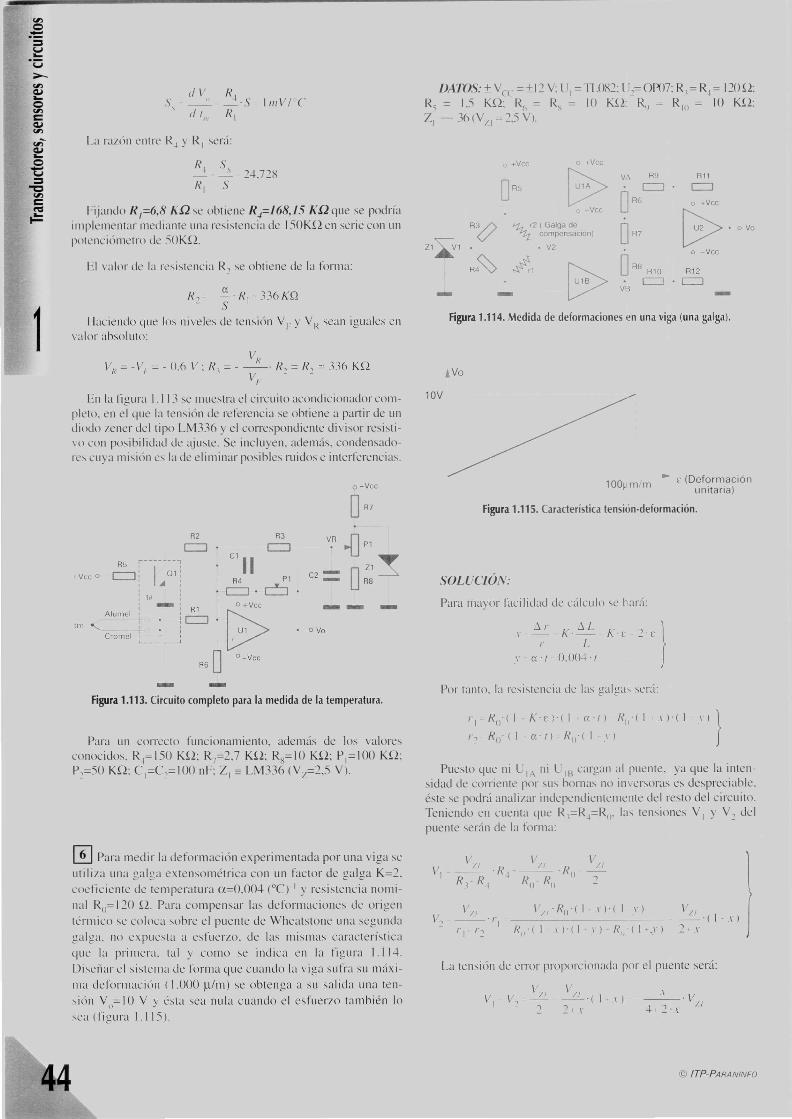
III/IIIC
¡Va
1OOum m •. F (Deformación. unitaria)
Figura 1.115. Característica tensión·deformación.
¡', l' "e. /. L' ~ )I - 1"-- I\'¡: .'..¡:l' r
\' [(" (l.OO.j.·/
Para mayor faci Iidad dc cálculo sc hlrá:
Figura 1.114. Medida de deformaciones en una viga (una galga).
SOLUCIÓN:
+Vcc +Vcc
C? VA R9 Rll
DR5 c=J c=J[ R6 o +Vcc
Vec [?R~~r2 ( Galga de
D Rlo Va
compensaclon)
Zl~l • V2
R~ O R8 RlO
o -Vcc
~1 b Rl2
c=J c=J- - VI3 -
10V
DAIVS:±Vcc =±12 v: 1I,=TIHQ: U.,=OK)7: R,= R~= 120l:tR) 1.5 KQ: R(, = R, = 10 KQ: R,) = RIIJ = 10 Kl:2:ZI 36(V/
1=2..'i V).
o -Vcc
-- -o Va
R3
~
2·U2X
R4 Pl
~·Ó
R2
~R5 ;-------¡
~: 101,, A ,, ,1 ta :1 _ 1 o tVcc
Alumcl: : Rl G>IIll i :~
'-. : : UlCromel ~ J
R6 o ó-Vee
t Vr.c o
d,,,,
~. N 336KQS 1
El valor dc la resistcncia R, sc obtiene de la forma:
La ra;:lÍn cntrc R¡) R 1 scrá:
Haciendo que los nivelcs dc tcnsilÍn V F Y VI' scan igualcs cnvalor absoluto:
R~ .\
NI S
Fijando R,=6,8 Kfhe obtienc R.¡=J68,J5 K.Qque se podríaimplcmcntar mcdiantc una rcsistcncia dc 150KQ cn scric con unpotcncilÍmctro dc 50KQ.
VI<VII = - V, = - 0.6 V : R, = - V·R 2 = R2 = 336 KQ
/
En la figura 1.113 sc mucstra d circuito acondicionador com-plcto. cn cl quc la tcnsión dc rclácncia sc obticnc a partir dc undiodo /ener del tipo LM336 y cl corrcspondiclllc divisor resisti-\0 con posibilidad de ajuste. Sc incluyen. además. condensado-rcs cuya misilÍn cs la dc eliminar posibles ruidos e interferencias.
1
- -Figura 1.113, Circuito completo para la medida de la temperatura.Por tanto. la rcsistcneia dc las galgas será:
La tensión de error proporcionada por el puentc será:
V V V/1V --/_I-'N~ / 'NoI R, R~ No No 2
V/1 V 'Ro'( 1 I lo( 1 1') 11/1V, / (l·--'/"I I l1', ,., NI' ( 1 l' ). ( 1 l') R" ( 1 .\' ) 2,.1'
Puesto que ni U I \ ni U 'B cargan al puellle. ya que la intcn-sidad de cOITicntc por \u\ bornas no ill\ersoras cs despreciable.éste se podrá analizar indepcndientemente del rcsto del circuito.Teniendo en cuenta quc R,=R¡=R1J" la\ tensiones VI y V2 delpuente serán de la forma:
__ .1'_. V'. '.' /1"+ - .1
K· ¡: ). (1 [( . 'l No' ( 1 '.1 l' ( 1[(. 1) Ro' (1 l' )
V,
1', Ro'( 1
1', No' ( I
o Para medir la deformación cxpcrimentada por una viga seutili/.a una galga extensométrica con un factor dc galga K=2.coeficicntc dc tcmpcratura a=O.OO-+ (OCrl y resistencia nomi-nal RIJ=120 Q. Para compcnsar las deformacioncs de origentérmico se coloca sobre cl pucntc dc Whcatstone una scgundagalga. no expuesta a esfucrzo. de las mismas característicaquc la primera. tal y como sc indica cn la figura 1.11-+.Discñar cl sistema de forma quc cuando la viga sufra su máxi-nl<l deformación (\.000 )..l/m) sc obtcnga a su salida una tcn-silÍn V,,= 1O V Y ésta sea nula cuando el esfuerzo también losca (figura 1.115).
Para un corrccto funcionamicnto. adcmás dc los valoresconocidos. R~=150 KO: R7=2.7 KQ: Rx=IO KQ: P,=IOO KO:P2=50 KQ: C¡=C2=100 nF: Z¡;: LM336 (V/=2.5 V).
4 © ITP-PARAN/NFO

1
Puesto que R9=RIO se ha de cumplir que RI/=R12.
Analizando el resto del amplificador de instrumentación y,teniendo en cuenta que R6=Rg, se cumple:
RV= __ II·(V-V)
u R A B9
Teniendo en cuenta esta consideración, la tensión de salidaserá de la forma:
Esta función ha de cumplir la gráfica de la figura 1.115, porlo que para una deformación de 1.000 !..un/m, V0=10 V. Puestoque se desconoce el valor de R7 y R 11' se fijará una de ellas parapoder determinar la otra. Fijando R Jl=R 12=500 Ko., se obtieneque R7 :- 100 .Q
Evidentemente, en ausencia de esfuerzo, el puente está equi-librado: V1-VZ=O.
Para pequeños valores de "x", (x « l), la tensión de errorpuede expresarse de la forma:
v=-~.v+ R1Z .(I+~).V() R9 A R¡o+RI2 Rg B
Para que la tensión de salida sea proporcional a la diferenciade VA YVB se ha de cumplir:
Los tres amplificadores operacionales, junto con los compo-nentes a ellos asociados constituyen un amplificador de instru-mentación de elevada impedancia de entrada. Del análisis de Uzse desprende que:
© ITP-PARANINFO

~o-°5\J..°u>-~QJ..o~eQJ~~QJ..~="'C :.~etU~ •
1 •
l. Clasificación de los transductores. Característicasfundamentales de los mismos.
2. Tipos de transductores de temperatura. Característi-cas principales.
3. El termopar: principios de funcionamiento y técni-cas de compensación.
4. Clasificación de los transductores de velocidad ydesplazamiento. Características principales.
5. Transduclores de fuerza o deformación: Tipos,características y principios de funcionamiento.
••
6. Transductores de corriente. Principios de funciona-miento.
7. Diferencias fundamentales entre un amplificadoroperacional ideal y real.
8. El amplificador de instrumentación. Característicasy cálculo de la tensión de salida.
9. Comparadores de tensión: Tipos y función de trans-ferencia .
10. El puente de Wheatstone. Equilibrio y desequilibriodel mismo. Cálculo de la tensión de salida.
© /TP-PARANINFO

IEl diodo d!el tiristol1 YJ e
lectifr'
•. Clasificar los diodos, tiristores y CTO:s utilizados en los equipos de potencia en fun-ción de sus características funcionales y áreas de aplicación.
•. Describir el funcionamiento de dichos dispositivos electrónicos de potencia, sus CClrac-terísticas eléctricas y los parámetros más importantes .
•. Explicar los efectos que la frecuencia de trabajo y las condiciones de temperatura ejer-cen sobre estos dispositivos electrónicos de potencia y las soluciones que se adoptan enlos casos más generales .
•. Conocer los sistemas de disparo y de corte utilizados para el control de estos elementoselectrónicos de potencia .
•. Clasificar por su función los distintos circuitos electrónicos que se emplean en aplica-ciones de potencia (rectificado res, convertidores CAlCC), indicando las característicasde cada uno de ellos.
•. En varios casos práoticos de análisis funcional de circuitos y sistemas electrónicos depotencia:
• Identificar los componentes activos y pasivos del circuito relacionando los elementosreales con los sím olos que aparecen en los esquemas.
• Conocer el princip¡io de funcionamiento y características fundamentales de los dio-dos, tiristores y CrO s.
• Calcular las magnitudes básicas del circuito, contrastándolas con los valores realesobtenidos midiend en el circuito, explicando y justificando dicha relación.
• Identificar la variación en los parámetros característicos del circuito (forma de onda,tensiones) realizando modificaciones en los componentes del mismo, explicando larelación entre los efectos detectados y las causas que los producen .
•. Reconocer los parámetros fundamentales y necesarios de los dispositivos básicos depotencia mediante la utilización de los manuales de características técnicas.

wd
- v'bl
Figura 2.2. Anchura de la región de carga espacial.
"
donde: • q: es la carga del electrón (1.6· 10-19 Culombios).• Ni es la concentración de impurezas en la zona Ir.• e: es la constante dieléctrica del silicio (l ,05·1 0-12
F/cm).• EBD: es el campo eléctrico que produce la ruptura
(2· 105 V/cm).
2.2.2. Tensión de ruptura del diodoSe trata de aquella tensión (BY BD) para la cual el campo eléc-
trico producido (EBD) ocasiona la ruptura del elemento. Dichatensión vale, en este caso:
[J........ [J []· · ··D. ". '.- ... . ..- ", ..p+ : : '. . .' n- n+ P"-: . : : . : .n., : '. " ',', .' n.
••••••••• • ••••••.••. o, ••.
Los parámetros e.,q y EBD son prácticamente constantes a lahora de diseñar un diodo de potencia. Por este motivo, para con-trolar la tensión de ruptura únicamente se puede actuar sobre elnivel de impurezas en la región n- ( d)' de tal forma que p,u'aobtener tensiones de ruptura elevadas han de ser pocas las impu-rezas en la región tipo n·.
Sin embargo, la resistividad intrínseca es inversamente pro-porcional a la densidad de impurezas, de tal forma que si setoma una concentración de impurezas "Nd" muy baja se ele-varán las pérdidas. Para solucionar esta cuestión se busca unaanchura de la región de carga espacial (Old) muy pequeña que seacapaz de alberg<u' la zona de cargas positivas, acotando así lasImpurezas.
Al igual que sucede con el diodo de pequeña señal, cuando elpotencial del ánodo (A) es positivo con respecto al cátodo (K)se dice que el diodo tiene polarización directa. Si dicha tensiónhace que exista un incremento apreciable de cOITiente el ele-mento conduce, siendo la caída de tensión entre sus extremos(Yo) relativamente baja. Dicha tensión dependerá, principal-mente, del proceso de control y de la temperatura de la unión.Por el contrario. cuando el potencial del cátodo es positivo conrespecto al ánodo, se dice que el diodo tiene polarización inver-sa y no conduce.
2.2. El diodo de otencia
2.1. Introducción
2.2.1. Estructura básica. Características
La electrónica de potencia incorpora dispositivos capaces desopol1ar tensiones de trabajo del orden de KV. De esta forma seconsigue que los elementos electrónicos de potencia posean unagran capacidad de maniobra con potencias del orden de MYA.
Tres son los dispositivos que forman la base de la electrónicade potencia:
• Diodo de potencia.• Tiristor.• G.T.O.
Pese a que fueron los primeros en desarrollarse y utilizarse,todavía siguen jugando un papel importante en los sistemaselectrónicos de potencia, aunque se han desarrollado otros dis-positivos más rápidos pero no por ello con mejores característi-cas en cuanto a la potencia a controlar se refiere.
Entre las aplicaciones más importantes de estos tipos de dis-positivos, sin duda alguna, se encuentra la rectificación monofá-sica y trifásica. tanto controlada como no controlada.
Aunque su construcción es similar al diodo de pequeña señal"P-N", los diodos de potencia poseen una mayor capacidad parael control de energía, mientras que su respuesta en frecuencia(velocidad de conmutación) es menor que en los primeros.
Son dispositivos de unión "P-N" de dos terminales en losque la capa "n" está dividida a su vez en dos partes n+ (altaconcentración de impurezas) y n- (pequeña concentración deimpurezas).
El espesor de la capa n- depende de la tensión de ruptura deldispositivo (a mayor tensión de ruptura mayor es el espesor dela capa n-). Dicha región no existe en los diodos de pequeñaseñal, puesto que la tensión inversa que sopOltan es baja. En losdiodos de potencia esta capa n- es necesaria ya que dicha tensiónpuede llegar a alcanzar valores elevados.
En la figura 2. l está representado el símbolo, estructura ycurva característica de un diodo de potencia.
Los diodos semiconductores de potencia son elementos quejuegan un papel importante en los circuitos electrónicos depotencia. Entre sus funciones se puede mencionar algunascomo interruptor en los rectificadores, de marcha libre en losreguladores' conmutados, recuperación de energía, etc.
'jv •••••
•10~lm
1Dellende delllollajfl
de ruplUla BVIII)
250pm ,
oANODO (Al
p+ N... 101~cm)
n+ NO",10'~cmJ
o CATODO (K)
A p<utir de aquí se podrán utiliz<u'dos criterios para calcularel valor de Old:
2.2.2.1. Criterio 18) b)
Figura 2.1. Símbolo, estructura y característica tensión-corrientedel diodo de potencia.
Cuando toda la región de carga espacial esté restringida a lazona n' (figura 2.2.a). En este caso Old;::;Oln cuando Y=BY BD' Laanchura de dicha región será:
© ITp·PARANINFO

2· BVBOW" = - 10-5. BVBOEBO
Este criterio se aplica para diodos del tipo sin perforación"NO PUNCH-THROUGH".
2.2.2.2. Criterio 2La región de carga espacial no se restringe a la capa n- sino
que pasa también a la zona n+ (figura 2.2.b).
En este caso, la expresión de la tensión de ruptura del diodoes:
En el supuesto de que la zona de carga coincida con el límitede n+ (criterio 1)Yteniendo en cuenta que N,,=( EBD·€)!( q'w,,), seobtiene:
Con el fin de que no se acumule carga, se ha de mantener unaneutralidad eléctrica y, por tanto, 8 ::: 0n' A medida que lacon-iente directa IF crece y se acerca: la intensidad nominal deldiodo se produce el fenómeno de "doble alta inyección", es decir:0P' 0n>nno(concentración de pOltadores en equilibrio térmico).
Es entonces cuando se acumulan en dicha región (n-) un granexceso de portadores, lo cual provoca un aumento notable de laconductividad eléctrica efectiva de la región n- y, por tanto, laspérdidas disminuyen (modulación de conductividad).
El valor medio de la corriente será:
/ =_I'/"=f'/'fFI ON) 7~ l· P S F "
El cuadrado del valor eficaz de la corriente es:
/2 l /2 j' /2FlHMS)=T' F",,=S' F'f"
SLas pérdidas en conducción serán:
P =V·/ +/2 ·RCOI/ti ON 1-(A V) F(RMS) ON
Por otra palte, supuesta fija wd y considerando Nd=ü' paramaximizar la tensión de ruptura:
donde: • RONes la resistencia en conducción.• fs es la frecuencia de la señal de control del diodo.• tp es el tiempo de conducción directa del diodo.
En cuanto a las pérdidas en conmutación. si se realizan fscon mutaciones por segundo, la potencia que se disipa es:
?q'N,,' w;; BVBD
BV1"1)= E1"D'W(I- - E ·w = W =--" 7. }JD d d E- E }JD
Este criterio se aplica para diodos '"p-i-n" (capa "p", insula- 2 2 4 e ct" t' d t'"tor, capa "n"). .x. • •• ara erls ICas e conmu aClon
Finalmente, decir que tanto los casos intermedios como los"p-i-n" se agrupan bajo la denominación de diodos con perfora-ción (PUNCH-THROUGH).
En la figura 2.4 se muestran las formas de onda de tensióny de corriente en un diodo cuando éste entra en conducción(transitorio OFF~ON) y cuando deja de conducir (transitorioON~OFF).
Figura 2.4. Características de conmutación del diodo de potencia.
IIrr
- t3 -r" t4 •.• t5 .-trr _
- t1 -t2-
o
i(t) t J!!LI dt I
III
--l- -'
-VR
VON = Vwd + Vj ~Vj + RON' / F
Al conducir el diodo, los huecos de la región p+penetrarán enla región n- (figura 2.3), mientras que los electrones siguen elsentido contrario (de n+ a n-). Este flujo aumenta si la corrientedirecta (IF) es elevada, por lo que en la región n- se acumula unexceso de portadores. Se denominará 0p al exceso de huecos enla región n- y 0n al exceso de electrones.
2.2.3. Pérdidas en conducciónCuando el diodo está polarizado directamente (ON), la caída
de tensión en la región n- (V"'d) es, junto con la caída de tensiónen la unión (V), el término más importante de caída de tensiónen conducción) (VON)'
+ · I ·+ · · -. · ·p+ + · n- · - n++ · · ,- 2.2.4.1. Transitorio OFF-f ON
+ VFigura 2.3. Flujo de portadores con el diodo polarizado en directo.
Cuando el diodo entra en conducción cabe destacar:
• Durante un intervalo de tiempo ti' crece la tensión enextremos del mismo y la intensidad de corriente aumentaa una velocidad cliF/ dI.
© ITP-PARANINFO

2.2.5.2. Diodos de recuperación rápida
n
o A Aluminio (unión rectificadora)Si02
Los diodos de uso general poseen un tiempo inverso de recu-peración relativamente alto, típicamente 25 /lsegundos. Se utili-zan en aplicaciones de baja velocidad de conmutación, en lasque el tiempo de recuperación no es crítico; por ejemplo, en rec-tificadores y convel1idores para baja frecuencia de entrada(hasta 1 KHz). Las especificaciones de coniente de estos diodosvan desde unos pocos hasta miles de amperios. En cuanto a lasde tensión van desde 50Y hasta 5KY aproximadamente.
Tienen un tiempo de recuperación bajo (en general menor de5 /lsegundos). Se utilizan en convertidores DC-DC y DC-DA,en los que la velocidad de recuperación es de vital importancia.Sus especificaciones de cOITiente van desde unos pocos hastacientos de amperios y las de tensión desde 50Y hasta, aproxi-madamente,3KY.
2.2.5.1. Diodos de uso general
Son aquéllos en los que el problema de almacenamiento decarga de la unión P se elimina (o minimiza) estableciendo unabaITera de potencial con un contacto óhmico entre un metal y elsemiconductor (figura 2.5). Sobre una delgada capa de siliciotipo "n" se deposita una capa metálica, de tal forma que l? blliTe-ra de potencial simula el comportamiento de la unión PN.
\2.2.5.3. Diodos Schottky
Durante el paso a corte del diodo cabe destacar:
• Dependiendo del circuito de potencia, durante el intervalode tiempo t3, la intensidad de corriente cae con un veloci-dad diR/dl.
• Durante un cierto tiempo (t4), la intensidad cae a valoresnegativos. debido a la existencia de exceso de portadoresde carga que no se han podido eliminar. Transcurrido estetiempo se ha eliminado suficientemente el exceso de por-tadores y comienza la polarización inversa.
• Aparece un pico de sobretensión debido a la inductanciaequivalente del diodo (en serie con él).
• El tiempo de recuperación inversa (trr) comprende el inter-valo de tiempo desde que la corriente (iF) pasa por cero enel cambio ON~OFF hasta que la corriente inversa sereduce al 25% de su valor inverso Irr. Dicho tiempo depen-de de la temperatura de la unión, de la velocidad con laque la intensidad de corriente directa cae y de la propiaintensidad de corriente directa antes de la conmutación.
diR diR{ ~I '--~I --" 4 dI n' dI
• Inicialmente. la región n- es muy resistiva ya que necesitaun ciel10 tiempo para acumular exceso de portadores.
• TranscUlTido ti la cOITiente directa se estabiliza y la ten-sión entre ánodo y cátodo disminuye durante el intervalot" hasta alcanzar el valor YON'
• La inductancia equivalente del diodo será:
2.2.4.2. Transitorio ON -1Off
• La carga de recuperación inversa "Qrr" es la cantidad deportadores de carga que fluyen a través del diodo en direc-ción inversa debido al cambio ON~OFF. La carga dealmacenamiento será el área envuelta por la trayectoria dela corriente de recuperación y valdrá, aproximadamente:
n+
oK Aluminio (contacto óhmico)
Si se hace que 1,.,.= '4 + 15~ 14 . se tiene:
I I IQ ~ _.{ '1 + _.{ '1 =_.{ '1rr 2 rr 4 2 rr 5 2 rr rr
2.2.5. Tipos de diodos de potenciaIdealmente los diodos no deberían poseer tiempo de recupe-
ración inversa. Sin embargo, el alto coste que ello supondríahace que, dependiendo de las características de recuperación yde las técnicas de fabricación, los diodos de potencia se puedanclasificar en tres categorías:
Figura 2.5. Estructura interna del diodo Schottyky.
La diferencia fundamental con los anteriores diodos estribaen que la acción rectificadora sólo depende de los portadoresmayoritarios, ya que, tanto en la región '"n" como en la "n+" úni-camente habrá electrones, no existiendo portadores minoritarios
. en exceso para recombinar. Esto provoca que sea imposible laexistencia de la denominada "modulación de conductividad", yaque requeriría doble alta inyección de huecos y de electrones.
Será imposible, por tanto, que se acumule un gran exceso deelectrones ya que ha de mantenerse la neutralidad; motivo por elque no es posible la existencia de modulación, aunque implicaun aumento de las pérdidas.
PaI"aevitar que dichas pérdidas sean excesivas se emplea uncristal tipo "n" y no "n-" ya que si la concentración de impure-zas aumenta, la conductividad aumenta.
La tensión de ruptura es baja, mucho menor que en los dio-dos convencionales, debido precisamente a esta zona "n" enlugaI"de "n"" (50Y~BY BD ~IOOY). En lo que se refiere a la ten-
diR2'Q .rr dI
{ ~rr
1 rr
? 'Q{ ~~
rr
1 ~rr
De aquí se obtiene:
© ITp·PARANINFO

sión de conducción (YON)' en un diodo Schottky es, práctica-mente, la mitad de la de un diodo de silicio convencional.
Al no existir portadores m~noritarios, los tiempos de conmu-tación son mejores, ya que no hay que elimjnar exceso de acu-mulación de portadores.
En lo que se refiere a sus especificaciones de corriente, varíanentre 1 y 300A, por lo que resultan ideales para fuentes de ali-mentación de alta corriente y bajo voltaje.
2.3. El tiristorEs el elemento que más potencia es capaz de controlar, ya que
puede trabajar con intensidades de corriente de hasta 3.000 A Ytensiones inversas de hasta 5.000 Y, pero su capacidad de res-puesta está bastante limüada.
Entre sus aplicaciones se pueden destacar la de rectificación,interrupción de corriente eléctrica, regulación, etc.
2.3.1. Estructura físicaSe trata de un dispositivo semiconductor de estado sólido
formado por cuatro capas "p" y "n" alternativamente, dispuestastal y como se observa en la figura 2.6, en la que se puede apre-ciar, también su símbolo.
Sus dos terminales principales son el ánodo (A) y el cátodo(K), entre los cuales se cebará la corriente directa (electronesque van del cátodo al ánodo). El tercer terminal se trata de lapuerta (G) o electrodo de cont¡rol, encargado de controlar dichoflujo de electrones.
Es un elemento unidirecciqnal en el que una vez aplicada laseñal de mando en la puerta, el dispositivo deja pasar unacorriente que sólo puede tomar un único sentido.
lQ19cm·JCÁTOOO(K)
·~rJ3 n+
T""1017 cm-3 __ 30-100 pmJ2
GvAK
1013_5xl014em-3 50- lOOO).lmJ1
lO17em-3 30-50 11mK +
/'
a)lO19cm"3
ÁNODO(AIbl
Figura 2.6. Estructura interna y símbolo del tiristor.
Cuando la tensión vAK es nula, también lo es la intensidadde corriente iA. Al aumentar dicha tensión en sentido directo,con corriente de puerta nula, si se supera la tensión YBO' latransición OFF ---7ON deja de ser controlada. Si se desea queel paso al estado "ON" se realice para tensiones vAK inferio-res a V BO será necesario dotar al dispositivo de la corrientede puerta adecuada para que dicha transición se realice cuan-do la intensidad de ánodo supere la intensidad de enganche(lL)' Por el contrario, si el dispositivo está en conducción, latransición al estado OFF se produce cuando la corriente deánodo caiga por debajo de la intensidad de corriente de man-tenimiento (IH).
Si se polariza inversamente el tiristor existirá una débilcorriente inversa de fugas, hasta que se alcance el punto detensión inversa máxima (-y RWM)' provocándose la destruc-ción del elemento.
Es, por tanto, un dispositivo conductor sólo en el primercuadrante, en el cual el disparo se provoca por un aumento dela tensión directa, teniendo en cuenta que a medida queaumente la corriente de puerta, el punto de disparo YBO sedesplaza hacia la izquierda. Se puede controlar así la tensiónnecesaria entre ánodo y cátodo para la transición OFF ---7ON,usando la corriente de puerta adecuada. En cuanto a la transi-ción ON---70FF no se puede controlar, sino que es el propiocircuito de potencia el que la provoca.
2.3.3. El tiristor en estadode bloqueo (OFF)
Por simplicidad de análisis se supondrá que el cátodo deltiristor se encuentra conectado a potencial cero (masa) y que lapuerta no se encuentra conectada. En estas condiciones se puedecomparar el tiristor con tres diodos conectados en oposición taly como se indica en la figura 2.8 (a).
De esta forma, si la tensión de ánodo es positiva, el elemen-to está polarizado directamente, pero el diodo "p¡ n2" bloquea latensión aplicada. Si por el contrario, la tensión de ánodo es nega-tiva, los diodos "P2n2" y "p¡ n I"están en inverso. Por ser débil latensión de avalancha de "Plnl", su papel es despreciable y es"P2n2" el que ha de limitar la corriente inversa de fugas. La ten-sión máxima viene limitada prácticamente por la tensión de ava-lancha de los diodos "P2n2" y "p¡n¡".
,"'2.3.2. Característica tensión-corrienteEn la figura 2.7 se muestra}a curva característica típica de un
tiristor, representándose la corriente de ánodo (iA) en función dela tensión aplicada entre ánodo y cátodo (vAK)'
2.3.4. El tiristor en estadode conducción (ON)
iA
Figura 2.7. Característica tensión-corriente de un tiristor.
Estado de conducción directo
Para realizar este estudio se utilizará el circuito equivalentedel tiristor mediante transistores (figura 2.8.b). Estos transistoresestán conectados de forma que se obtiene una realimentaciónpositiva.
Suponiendo que la región "P2" tenga aplicada una tensiónpositiva con respecto a la zona "n 1", las uniones J3 y J ¡ emitenportadores de carga, positivos y negativos respectivamente,hacia las regiones n2 y p¡. Estos portadores, tras su difusión enlas bases de los transistores llegarán a la unión J2, donde la cargaespacial crea un intenso campo eléctrico.
~ vAK/
/
iG4>iG3>iG2>iGl
Estado directo de bloqueo
IH
IBO = IL,VRWM
© ITP-PARANlNFO

iA A r "f• IE2p2
182 'J3 • Diodo p2n2
. ~(n-)
I
I J.'. Q2(B21n2 ICl I I IC2
J2 • Diodo pln2 '\ niG
I Ql(Bl) i~,~·~~o GGo pl
(n+ )Jl TDiodo plnl f: '" "I IEl
nl ,IK.
K °K Kal b)
Figura 2.8. a) Modelo equivalente simplificado del tiristor con diodos¡b)Circuito equivalente con transistores.
Siendo al la ganancia de cOITiente de Ql (fracción de lacorriente de huecos inyectada en el emisor y que llega al colec-tor del transistor NPN) y al la ganancia de corriente de QI (frac-ción de la corriente de electrones inyectados en el emisor y quellega al colector del transistor PNP), se obtiene:
Se llega a la conclusión de que la corriente de ánodo (lA)depende de la de puelta (lG)' pero también depende de al y aly, en menor medida, de Icol y de Icol' por ser éstas muypequeñas.
Ahora bien, en algunos transistores de silicio, la ganancia"a"es baja para valores reducidos de corriente, pero aumentacuando lo hace la corriente. Para lG=O, si lcol+lc02 es reducida,el denominador de la fracción, para pequeñas corrientes, se acer-ca a la unidad y la corriente lA apenas es mayor que la corrientede fugas (tiristor en estado OFF).
Por el contrario, cuando por cualquier motivo aumenta lacorriente de fugas (lCOI+IC02)'lo hacen también la corriente y laganancia. La suma al+ al =::l implica que el denominador tien-de a cero y la corriente de ánodo a infinito (tiristor en estadoON). En la realidad, la lA es elevada y su valor está limitado porel circuito externo. Conviene recordar que este tipo de cebadopor aumento de la corriente de fugas, o lo que es lo mismo, poraumento de tensión aplicada entre ánodo y cátodo es desacon-sejable en la mayoría de los casos.
2.3.5. Principio de cebado por puertaEl cebado por puelta es el método más usual de disparo de
tiristores. Una vez polarizado directamente el tiristor se aplicaun impulso positivo en la puerta (impulso de cOITiente IG). Eltransistor NPN (QI) recibe una con'iente de base IG,pasando sucorriente de colector a ser IG'~i' donde ~I es la ganancia decorriente en emisor común de dicho transistor.
Esta corriente se inyecta, a su vez, en la base del transistorPNP (Ql)' siendo entonces su corriente de colector lG'~I'~l'donde ~l es la ganancia de corriente en emisor común de dichotransistor. A partir de aquí pueden producirse dos circunstanciasdiferentes:
• El producto ~I'~l< 1, en cuyo caso el elemento no se ceba.
• El producto ~1'~l=::l,se realiza el proceso de amplificacióny el elemento conmuta al estado conductor (ON).
Estas condiciones determinan el estado del tiristor en funciónde la corriente, pues no se ha de olvidar que la ganancia ~ de lostransistores de silicio normalmente aumenta en función de laintensidad de corriente.
En cuanto se produce el cebado, la realimentación positiva decorriente hace que los dos transistores conduzcan hasta saturar-se (la corriente de colector de uno se inyecta directamente en labase del otro). Una vez en conducción, los transistores se man-tienen en ese estado, incluso aunque desaparezca el impulso ini-cial de puerta, hasta que el circuito exterior deje de mantener lacorriente de ánodo (lA) por enci ma de 111,
/2.3.6. Formas de cebar un tiristorEntre las diferentes formas de disparar un tiristor, las mas
importantes son:
.• Por tensión VAK: Cuando aumenta progresivamente latensión aplicada entre ánodo y cátodo llega un momentoen que la corriente de fugas es suficiente para provocar unbrusco aumento de la corriente de ánodo.
• La derivada de la tensión VAK: La unión PN presenta unefecto de capacidad. Si la tensión VAKcrece bruscamente,la intensidad de corriente de carga de dicha capacidad es:
. d VAKl=C--
dr
Cuando esta cOITientede carga es suficientemente eleva-da, provocará el cebado del tiristor.
• La temperatura: La corriente de fugas de un transistor desilicio aumenta con la temperatura (aproximadamente aldoble cada 10°C). Si esta corriente alcanza un valor sufi-ciente se produce el disparo del tilistor.
• El efecto transistor: Se trata de la fonna clásica de gober-nar un tiristor. En la puerta del tiristor (base del transistorequivalente) se inyectan pOltadores suplementarios queprovocan el fenómeno de cebado.
i 2.3.7. Características de conmutación
2.3.7.1. Transitorio OFF-70NPara que se produzca el cebado, la corriente de ánodo del
tiristor debe alcanzar un valor mínimo denominado corriente deenganche (I[). El dispositivo no se cebará si el impulso de puer-ta "iG(t)"desaparece antes de que la corriente de ánodo alcanceel valor de IL, la cual depende de la anchura y la intensidad decorriente del impulso de mando (figura 2.9.a).
Este valor de IL es, obviamente, más pequeño que el de lacorriente de mantenimiento 'H que, una vez desaparecido elimpulso de mando, es suficiente para mantener cebado eltiristor.
Cabe destacar el tiempo "tdCON)"de retraso de paso al estadoON, durante el que se produce la acumulación de exceso de por-
© ITP-PARANINFO

~- !
1 1,5 2 2,5 3 3,5 4 4,5 5
TenSIón directa máXima en puerta VFGM(V)
o 0,5
rn _ 2,5
E~'x ::2: 2'ro CJE _lL 1,5
<D ro_te <D 1Q) ::o
o¡:: n.o Q) 0,50"0Impulso de puerta
.\' Figura 2.10. Características de puerta de un tiristor.
Puesto que las corrientes y tensiones de puerta que provocanel cebado varían con la temperatura y la fabricación, es necesa-rio definir una supelt'icie "S" en el plano con'iente-tensión depuerta (lG' VG)' en la que quede garantizado el disparo del tiris-tor; parámetros que disminuyen al aumentar la temperatura,motivo por el cual el fabricante facilita, también, el límite depotencia disipable en la puerta.
2.3.9. Importancia de la velocidadde crecimiento de la corriente(di/dt) y de la tensión (dv/dt)
iA(t)
• t
a)
o JiG(t)
j2jA(t)diF" t
o df J- ~t~_~l~-_- __~!!:-~
vAK(t) :o i-tp~.¡
, ,,: '
--L
Figura 2.9. a) Formas de onda turn-on; b) Formas de onda turn-off.
tadores hasta que la intensidad lA supere la de enganche IL(a1+ a2 21); el tiempo de subida de la intensidad de corriente'\" y el tiempo que transcurre desde que la conducción deltiristor se debe a su zona central, próxima al contacto de puer-ta (la caída de tensión es ma or) hasta que la conducción sedeba a todo el elemento "t ". En cuanto a la velocidad de cre-cimiento de la intensidad (d irrIdl
) está limitada por la induc-tancia de la etapa de potencia a controlar.
2.3.7.2. Transitorio ON-j OFFLa extinción o descebado del tiristor se produce cuando se
reduce la corriente de ánodo pOr debajo de la corriente de man-tenimiento IH, o simplemente cuando se anula la cOITiente lA"
Si se desceba el tiristor en el instante t=O (figura 2.9.b), lacorriente disminuye a una velooidad (d iR Id t) que dependerá delcircuito de potencia y la tensión en el tiristor (:::1V) también dis-minuye ligeramente. En el instante tI' la corriente se invierte,hasta que llega a ~, momento en el que ésta se hace mínima y latensión cambia de signo. Inmediatamente después, ésta varíabruscamente produciéndose una sobreoscilación que dependeráde las capacidades del circuito. Se denominará "tn" al tiempoinverso de recuperación y "t " al tiempo de extinción, desde que. ) qlA(t pasa por cero hasta que se pueda aplicar de nuevo tensiónpositiva (directa).
Al aplicar de nuevo tensió? positiva aparece una pequeñaintensidad debida al exceso de ~ortadores que quedan en el tiris-tor. Si dicho exceso aún no ha disminuido lo suficiente, puededarse el caso de que IA>IL y el dispositivo volvería, de nuevo, alestado ON; de ahí la importancia de respetar este tiempo "t ". Lavelocidad de crecimiento de la tensión (d vF Idt) no debe ~upe-rar un cierto valor, ya que, de ~acerlo, provocaría que el dispo-sitivo pasase, de nuevo, a estado conductor (ON).
2.3.9.1. Velocidad de crecimientode la corriente (di/dt)
Durante el cebado, la zona de conducción se reduce a unaparte central, próxima a la puerta. Si el circuito exterior impone,durante esta fase, un crecimiento rápido de la intensidad, la den-sidad de corriente en esta zona de cebado puede alcanzar unvalor importante. Al mismo tiempo, el descenso de la caída detensión en el tiristor durante la conmutación OFF~ON no seproduce de forma instantánea. Habrá, por tanto, momentos enlos que se presenten, simultáneamente, valores elevados de ten-sión y de corriente. La potencia instantánea puede alcanzar asívalores muy altos (figura 2.II.a), de fonna que la energía disi-pada podría dar lugar a un calentamiento considerable que, dealcanzar el límite térmico crítico, daría lugar a la destrucción delelemento por dildt.
En la práctica, se coloca en serie con el tiristor una inductan-cia (Ls) que tiene por misión proteger al dispositivo de dichaexcesiva velocidad de crecimiento de la corriente. Además, enparalelo con Ls se coloca un diodo (Os) y una resistencia (Rs)para evitar problemas en la transición ON~OFF (figura 2.11.b).
Potencia disipada
b)
Go
a)
Figura 2.11. a) Variación de la potencia instantánea;b) Circuito de protección.
Tensión
Las características típicas de puerta conducen a la obtenciónde una familia de curvas, similares a las de la figura 2.10, dondese representa la relación corriente-tensión de puerta para undeterminado tiristor. Mediante estas curvas se pueden fijar lascondiciones extremas de disparo. Se debe tener en cuenta que amedida que la temperatura de funcionamiento aumenta, decrecela VG (para una IG dada) y viceversa.
>- 2.3.8. Características de puerta
© ITP-PARANlNFO

Para mejorar la relación dv/dt se puede colocar una resisten-cia en paralelo con la puerta, o bien, poner una resistencia Rsque limitará la intensidad de pico (figura 2.12.b):
2.3.9.2. Velocidad de crecimientode la tensión (dv/dt)
2.4. Tiristores de puertaTURN-OFF (GTO's)
Generalmente, en los circuitos de disparo de tiristores, se sue-len utilizar dos tipos de aislamiento galvánico: mediante trans-formador de impulsos y mediante optoacopúuJ.ores.
En la figura 2.13 se muestra un amplificador de intensidad depuerta con aislamiento por transformador de impulsos.
Debido a la existencia de inductancias que harían peligrar elcircuito con las variaciones di/dt, se coloca el diodo O2 comocamino alternativo a la corriente magnetizante del transforma-dor de impulsos cuando el MOSFET pasa a corte. AsÍ, laenergía almacenada en la bobina del primario se descarga através de O] y la tensión del primario se refleja ahora como unatensión negativa en el secundario. Por este motivo, para prote-ger la puerta del tiristor, es necesario el diodo O l' Despreciandola caída de tensión en el primario, se obtiene:
Vee!e;(ON) ~--
Re;
Por último, en etapas fueltemente inductivas, el pulso depuerta debe ser de la suficiente duración como para asegurarque iA>ILy que el dispositivo entra en conducción.
Conviene recordar que también existen otros elementosdenominados triacs (dos tiristores en antiparalelo) capaces deconducir corriente y soportar tensión en ambos sentidos (puedenconducir en los cuatro cuadrantes).
Cebado
642
(v)
100
200
500
300
Una velocidad excesiva de crecimiento de la tensión aplica-da entre ánodo y cátodo amenaza con provocar el cebado deltiristor bloqueado, en ausencia de señal de puerta. Este fenóme-no se debe a la capacidad interna del tiristor en la que la cOITien-te de carga puede ser lo suficientemente grande (si la velocidadde crecimiento de la tensión es elevada) como para lograr elcebado del elemento.
Por una parte, la dv/dt admisible disminuye con la tempera-tura, mientras que por otra la dv/dt que sopOlta un tÍlistor depen-de de la tensión final de ánodo. AsÍ, por ejemplo, un tiristor queno admita más que 50V/¡.ts, para una tensión final de 500Vadmitirá I00 V/¡.ts cuando la tensión final sea de 300V (figura2.12.a).
a) b)
Figura 2.12. a) Variación de dv/dt con VAKib) Circuito de protección contra dv/dt.
2.3.10. Circuitos de disparo de puerta
A veces, en determinadas aplicaciones, se necesita un ele-mento de gran potencia en el que la transición a estado OFF sepueda realizar controladamente, lo cual no es posible medianteel tiristor convencional, pero sí mediante los denominados tiris-tores de puerta turn-off (GTO), cuyo símbolo se especifica en lafigura 2.14 (a).
Su misión es introducir un pulso de intensidad de puerta queproduzca la transición del estado de bloqueo al de conducción.La duración de ese impulso de corriente iG(t) ha de tener unaduración mínima "tmín(ON)"y también una amplitud mínima"IG(ON)'"proporcionadas por el fabricante. A veces, dependien-do de la aplicación, se incrementa la amplitud del impulso al ini-cio de éste.
Transformador Ade impulsos
GVGG=15V o ,
~ . ~
.~
K
D2.D1
.
O RG
Pulso de controlt
R1 t~ Q
o c::::J t-
•••Figura 2.13. Circuito de disparo con transformador de impulsos.
2.4.1. Estructura físicaAl igual que el tiristor posee tres terminales: dos de ellos
(ánodo y cátodo) son los terminales a través de los cuales secebará la corriente principal; el tercero de ellos será el electrodode controlo puerta.
Entre las características fundamentales (figura 2.14) de losGTO's se puede destacar:
• Estructura puerta-cátodo fuertemente interdigitada: sepuede retirar cOITiente de manera muy efectiva desdetodos los puntos, ya que no quedan zonas distantes delcontacto de puerta.
• Estructura del cátodo en múltiples islas o mesetas de redu-cidas dimensiones.
• En muchos casos se emplean cortocircuitos de ánodo paraacelerar la transición ON~OFF. En este caso, las regionesn+ actúan como sumideros de huecos procedentes de lazona n- en la transición a estado OFF y con ello 10 acele-ran. La unión 11 ya no va a poder bloquear tensión inver-sa, pudiéndolo hacer únicamente la unión 13; pero comosus densidades a ambos lados no son altas, tiene el incon-veniente de que la tensión de ruptura desciende.
© ITP-PARANINFO
•

Analizando:
/ /'S/='C2-'e=a2"A-'e
'C2'el ='S2= ~2 =(I-a2)"A
al~,=--I - a,
a,Simplificando, y llamando ~ojJ= ----
a, + a2 - I
/ ,se obtiene que le> -,1_, donde:
~ojJ
• lA es la intensidad de corriente de ánodo.• f3'>/Jes la ganancia de apagado.
De aquí se deduce que interesa una ganancia de apagadorelativamente alta, lo cual implica que al también sea eleva-da y a2 baja. Para que el transistor pueda pasar a ON se debecumplir que al+a2~1. Ello se consigue, por una parte hacien-do que al:::l, lo cual implica que la base de Q¡ (región "p")debe ser de anchura reducida y, por otra, haciendo que a2 seamuy baja, lo cual se obtiene haciendo que la base de Q?(región "n-") sea ancha. -
n+
vAK
PUERTA (G)-o
p+
Con corrien·te continuade ánodoasimétrico
n+
p
CÁTODO (K)
I l'J3
J2
J1
ÁNODO (A)
Figura 2.14. Estructura y símbolo de un CTO.
Sin corrientecontinuade ánodosimétrico
a)
~
AlA I
, +
G _ :AK
O K
iA
En la figura 2.15 se puede observar la curva característicatensión-corriente de un GTO.
Figura 2.15. Característica tensión-corriente de un CTD.
2.4.2. Física del apagadoEn este apartado se trata de demostrar que para poner en esta-
do OFF el GTO es suficiente con introducir una intensidad decorriente negativa de puerta.
2.4.3. Características deconmutación
El estudio de este apartado se realizará sobre un posible cir-cuito de disparo de puerta que incluye, además, un sistema deprotección contra sobrecorrientes y sobretensiones del GTO,similar al utilizado con los tiristores (figura 2.17).
Oí~T
OVGG-,-
-CGG+
1TCGG-
Figura 2.17. Circuito de disparo para CTO.
-VGG=-15V
-VGG-+1SV
OPTOACOPLADOR
iA A
IE2,182
Q2(~2)
le1,IG2,
Q1(~1) oG.IG'
IK'ó K
Figura 2.16. Modelo equivalente del CTD con transistores.
En la figura 2.16 está representado el modelo equivalente delGTO con dos transistores. La intensidad negativa de puerta haráque la corriente de base de Q¡ disminuya y si ésta es lo sufi-cientemente fuerte podrá hacer que dicho transistor pase a corte.Es decir, Q, se cortará si lB I no es suficiente para mantener suintensidad de colector:
Para limitar la velocidad de crecimiento de la tensión dv/dt enel transitorio ON~OFF se utiliza el circuito formado por Rs' Osy Cs' mientras que para limitar la velocidad de crecimjento de lacorriente di/dt en el mismo transitorio se utiliza el circuito for-mado por Ls' RLSy DLS'
En este circuito de disparo, durante un tiempo "tw'" condu-cen Q, y Q2 (Q3 OFF) y la intensidad que circula por la puertadel GTO será IGM= l2A. Una vez transcurrido dicho tiempo sóloconducirá Q2, siendo la intensidad ahora IGF = 2A. Las resisten-cias Rs y R6 se colocan para controlar (fijar) las intensidades de
© ITp·PARANINFO

2.5. Rectificación
~ t
~ t
dV dV Idt<(jt max
.L-~=::¡===~_ ~ t
¡ iG
¡ iA
o ,vGK t , : tw2
~ :'00-'
Figura 2.18. a) Transitorio OFF--70N¡ b) Transitorio ON--7OFF.a)
Un rectificador se trata de un subsistema electrónico cuyamisión es la de convertir la tensión alterna de entrada, cuyo valormedio es nulo, en otra tensión unidireccional, de valor medio nonulo.
Entre los diferentes rectificadores que se tratarán en esteapartado se encuentran:
• Rectificador en puente monofásico.• Rectificador en puente trifásico.• Rectificador trifásico totalmente controlado.
Para todos ellos se denominará:
• Vi valor medio de la tensión de salida (o de la carga).• li valor medio de la intensidad de corriente de salida.• P¿=Vd . 1i potencia cedida a la carga.
PF: factor de potencia.• DPF: factor de potencia de desplazamiento.• Vs: valor eficaz (rms) de la tensión vs'• Vm = Vs·...ff: valor de pico o máximo.• VLL: tensión línea a línea.
¡iG tw1C"
~
. IGF>IGTIGM
o, ¡ : ¡ ~ t
~~~!'L-o~--~---;--- ~t
~o ~t
Q2 y QI' mientras que RI' R2, RJ Y R4 para conseguir que Q¡ yQ2 trabajen en corte y saturación.
Por el contrario, durante el transitorio OFF~ON será elMOSFET QJ (de baja tensión) el que conduzca, mientras que Q1y Q? estarán cortados. La inductancia LG, en serie con el drena-dor del MOSFET, se utiliza para controlar la pendiente de decre-cimiento de la intensidad negativa de puerta.
Se llamará "td(ON)" al tiempo de retraso a ON o tiempoque necesita el elemento en acumular exceso de portadores(a¡+ a2 ~l).
En la figura 2.18 (a) se observa una cierta sobreintensidadde "iA", debido a la corriente inversa de recuperación deldiodo Dr> conectado en paralelo con el GTO.
Inicialmente conducen Q¡ y Q2. Transcurrido un tiempo "tw¡"(de 10 a 20~s.) Q¡ deja de conducir y Q2 continua en conduc-ción para mantener lG=IGF>IGTdurante el resto del estado ON,siendo IGTla corriente de puerta mínima necesaria para mante-ner la conducción del GTO.
2.4.3.2. Transitorio ON ~ OFF
2.4.3.1. Transitorio OFF~ ON
En este caso, el transistor Q3 va a estar en conducción,.mientras que Q¡ y Q2 estarán al corte. La pendiente de decre-cimiento de la intensidad de puerta originada por Q3 será,aproximadamente igual a - Vcc / Lc' Durante "ts" (tiempo dealmacenamiento) las variables iA, vAK y vGK permanecenprácticamente constantes. Una vez transcurrido este tiemponecesario para eliminar suficientemente el exceso de portado-res, con el fin de que se cumpla la condición a¡+a2<1 (iG<O),comenzará realmente la transición ON~OFF en el GTO(figura 2.18.b).
Figura 2.19. a) Rectificador en puente monofásico¡ b) Modelo equivalente.
2.5.1. Rectificación en puentemonofásico
Sea el rectificador en puente monofásico de la figura 2.19 (a).Durante el semiciclo positivo de la señal de entrada conducenlos diodos D¡ y D2, mientras que durante el semiciclo negativoconducirán DJ y D4. Si el rectificador está en circuito abierto osi la carga es de tipo resistivo, la intensidad de corriente "is"estará en fase con la tensión "vs". Si, por el contrario, la cargaes de tipo inductivo, existirá un ángulo de desfase <PI entre lacorriente "is" y la tensión "vs".
id ¡carga
La polarización inversa de la umon puerta-cátodo (-VGG)debe producirse cuando "iG" alcanza su valor máximo (negati-vo), oponiéndose a que ésta siga aumentando y produciendo,gracias a la inductancia LG, un decrecimiento de la intensidad"iG" que originará la ruptura de la unión puerta-cátodo duranteel intervalo "tw2". Asimismo, "tgq" es el tiempo que tarda en pro-ducirse la polarización inversa en la unión puerta-cátodo.
La tensión vAKcrece lentamente debido a que Cs se opone adicho crecimiento. Considerando el caso más desfavorable(corte instantáneo de la intensidad lo)' la intensidad que circu-laría sería:
, = e . dVo s dt
Será necesario, por tanto, dimensionar el condensador Cs deforma que cumpla la condición:
'odVAK I
d t máx
---;: 1is .•••. 01 .•••.03·
~ • I
V<9 Ls I vd.04*02 _a)
-Cd
T
LsJYY"'.+ vL -
b)
¡carga
© ITP-PARANINFO

vs/
La potencia aparente será: P = Vs' Is
1 =s
Is· PFEl factor de potencia de desplazamiento es: DP F = ---
ISI
Se ha de tener en cuenta que el valor de "'s" es:
Para conseguir trabajar con factores de potencia elevados,que es el objetivo a buscar, será necesario trabajar con ángulosde desfase (<PI) pequeños y, al mismo tiempo, poca distorsión dered.
1El factor de potencia (PF) será: PF = ~'eos lfll
15
donde: • CfJI es el ángulo de desfase entre "vs" e "is 1"·
• Vs es el valor eficaz (nns) de la tensión de entrada"vs"·
• [SI es el valor eficaz (rms) de la intensidad decorriente "iS1".
Por lo que respecta a la corriente de entrada ''is'', ésta tendrála misma forma que '\", pero reflejada en los semiciclos nega-tivos (figura 2.20.c).
La potencia media entregada por el rectificador será de laforma:
A paJtir de las consideraciones anteriores, estas ecuacionespenniten obtener el valor de Sr'
Una vez conocido el valor de Sr Y teniendo en cuenta que"ictCwt)"se repite cada 7tradianes, su valor medio se obtiene pro-mediando "Ls·id (M)" en el intervalo O$wt$7t.
elLs'ld= ~ f Ls·id(wt)· d(wt)
el>
•. wto,
Área A=Área B vd" Vd.J2Vs
b)O •. wt
8,
e)
wt'P,
Figura 2.20. Formas de onda.
al
En el supuesto de carga inductiva y suponiendo que la inten-sidad "id" fuese fuertemente discontinua; es decir, en un semici-clo ésta debe pasar por cero aotes de que finalice el mismo, elmodelo equivalente del rectificador sería el mostrado en la figu-ra 2.19 (b), donde "Ls" representa la impedancia de la red y eldiodo indica que sólo puede circular intensidad de corriente "id"en un sentido. Dicho esto, las hipótesis de simplificación delmodelo a estudiar son las siguientes:
• Condensador Cd de gran capacidad, lo cual implica que elrizado a la salida será prácticamente nulo: vd (t)= Vd'
• Intensidad fuertemente discontinua.• En régimen permanente el valor medio de id será práctica-
mente igual al valor medio de iL: Id=IL.
Las diferentes formas de onda en el circuito serán las repre-sentadas en la figura 2.20.
Para el diseño del circuito será necesario conocer "Vd" enfunción de la intensidad por la carga "Iearoa"para un detennina-do valor de Vs y de Ls' o
En el intervalo O$wt$7t, teniendo en cuenta que "ict"es prác-ticamente nula hasta W·t=Sby a partir de M=Sr, se cumplen lasecuaclOnes:
~ wFigura 2.21. a) Rectificador en puente trifásico; b) Circuito equivalente.
;dp _ Icarg,!
~ r---'~ .
ci13i'~_a. Ls I
I bVLL vd Cd-
o~o Ls -Vd
LB l.~~_'_+_~ __2_~
En aplicaciones industriales donde se necesite trabajar conequipos de alta potencia se recurre a los rectificadores trifásicosen puente (figura 2.21.a).
2.5.2. Redificador en puente trifásicoVdsen8b= ---
V ·12s
TI\:j 0,;8
1,;-, 2
Se obtiene, por tanto: '.~/
'JVd8b = are sen ----,,- ;V,.·{i
En la figura 2.20 (b) se puede observar que Sb se trata delinstante de corte de I vs I con Vd' Su cálculo se realizará para0$Sb$7tl2:
\
IVs(t)I={f'Vs'senwlj M.. _ =
I 8 1
_ v2 Vs senwI-Vdvs( b) - Vd
v =-f2·V 'sen wl- VL '1"" s d
En el circuito se puede observar que los diodos están nume-rados en el mismo orden que van entrando en conducción; esdecir, cada uno de ellos conduce durante 1200.De este modo, los
© ITP-PARANINFO

diodos que en cada instante conducen serán aquéllos que esténconectados entre el par de líneas de alimentación que tengan ladiferencia de potencial más alta. Su circuito equivalente semuestra en la figura 2.21 (b).
En el punto "P", en circuito abierto, existirá siempre la ten-sión más positiva de las tres fases, mientras que en el punto "N"la más negativa. Los pulsos positivos de la envolvente están des-fasados 60 o con respecto a los negativos (figura 2.22.a).
Considerando "Ld" la inductancia del lado de continua, latensión a la salida del puente "v/ ya no coincide con la tensiónen bornes del condensador "V/. Si se supone el condensador"Cd" de capacidad elevada, el rizado será prácticamente nulo, locual implica que Vd (t)=Vd (figura 2.22.b).
El valor mínimo de la inductancia "Ld" requerido para que lacorriente "i/ sea continua viene dado por la expresión:
0,013' VLLL =---d(mín) ú)./
d
donde: • VLL es el voltaje de línea a línea.• m es la pulsación angular de línea (radianes/se-
gundo).
Si se considera la corriente "id" continua [Ld~Ld (mín)]'elvalor medio de la tensión de salida "Vd" puede ser calculado apartir de la figura 2.22.c. El área encen'ada debajo de "Vd" será:
n/6
Ad= f *VLL·COSüJ/'cl(ú.)l)=...J2,VLLn/6
Se obtiene entonces:
A / 3· f2V = _' = _V_L. V ~ I 35· Vd rel3 re LL' LL
Por el contrario, si la intensidad es fuertemente discol}1jnua[Ld<Ld(mín)],la tensión "Vd" es, aproximadamente: Vd:= >/2·Vu.
2.5.3. Rectificación trifásicatotalmente controlada
Este tipo de convertidores (figura 2.23) se utiliza en aplica-ciones industriales de muy altas potencias (hasta 800KVA) enlas que se requiere de una operación en dos cuadrantes (rectifi-cador o inversor); por ejemplo, para el control de motores decorriente continua en los que la tensión de alimentación debe sercontrolable.
Vd
I vab I vae I vbe I vba I vea I vebl vab II I I I I I I II I I I I I I I vd=Vd (circuitoabierto)I I I I I I I I
idPo fV'Y"\
+ Ld.••••. 1 ~3 ..•••. 5
aO o fV'Y"\
"-Ls
O~VLL
(P fV'Y"\ vdLs
0<; fV'Y"\Ls
~4 ..•••..6 .••••. 2oN
Figura 2.23. Rectificador en puente totalmente controlado.
En este caso, modificando el ángulo de disparo "u" de lostiristores se consigue variar el valor de la tensión de salida Vd'de tal forma que para ángulos de disparo altos, la tensión mediade salida es baja y viceversa.
Existen en el mercado circuitos integrados como el TCA 780capaces de producir seis señales de disparo de puerta (figura2.24). Se puede observar que en cada paso por cero de la señalde sincronismo se genera un diente de sierra, que tras ser com-parado con la señal de control provoca el impulso de disparo depuerta del tiristor correspondiente.
úll
úll
últ
últ
vd = Vd
I
'\ 6I vNn I I 6 1
5,6 ,1.6,1 .:.1,2 ,1.2,3 ,:.3,4 ,l. 4,5 ,:. 5,6.1.6,2 ,:.1,2I I I I I II I I I I II I I I I I II I I 1600 I I I
: : vd I :-=-=¡::
o
o
o
o
a)
b)
e)
El ángulo de disparo, siendo O::S:Vconlrol::S:Vsi (máx) vale:
Figura 2.22. a) Formas de onda en circuito abierto sin Cd(id-tOl¡b) Intensidad de corriente "i/ discontinua¡c) Intensidad de corriente "i/ continua.
Vex = I 80· (''''l/rol
V...., (lIIáx)
© /TP-PARANlNFO

VGI1,2)
o VGI3,4)
VGI5,G)
al
V(sincronismo) ,
VsIVst(máx)
V{controllO -1
b)VGI1,2~ i
~ Jl ~ -1
VG(3,4) lo ___ ~n -J------ L____j- I
VG(5,Gi
-IL ~
Figura 2.24. a) Circuito de disparo de puerta; b) Formas de onda.
2.5.3.1. Considerando Ls=O
En este supuesto las forma de onda serán las representadasen la figura 2.25.
El principal objetivo será determinar el valor medio de la ten-sión de salida Yd en función del ángulo de disparo: Yd=f(a).
Entonces:a
Aa = ¡{l' VLL·sen wt· d(wt) = [-{l' VLL·eos wt] =[2. VLL·(l-eos wt)O O
El valor de la tensión media de salida, en función del ángulode disparo será, por tanto:
3· ..¡l 3 ...¡l. VLL . (1- cos a)Vda
= __ o VLL
_
TI TI
3·..[2Vda=·--·VLL'COS a~ 1,35'VLL'cos a
TI
De esta expresión se deducen las siguientes conclusiones:
• Si a=0 0, se obtiene que Yda= l ,35·Y LL' lo cual supone elmismo nivel de tensión que con la rectificación no contro-lada.
• En el intervalo O0<a<90 0, la tensión Yda> Oy el circuitotrabaja en modo rectificador.
• Si a=90 0, se tiene que Yda= O, lo cual implica que lapotencia intercambiada es nula (tensión nula de salida).
• En el intervalo 90 0<a:S;1800, la tensión Yda< O Y el cir-cuito funciona en modo inversor, es decir, la potenciafluye desde el lado de continua alIado de alterna ya que latensión Yda en este caso es negativa. Para que el sistematrabaje en este modo es necesaria una fuente de energía enel lado de continua (por ejemplo una dínamo) para que seaposible dicho flujo de energía.
T1
aln
El circuito a estudiar es el representado en la figura 2.26 (a).Al tener en consideración Ls se recorta la curva de la tensión defase (área rayada Au)' tal y como se observa en la figura 2.26 (b).
2.5.3.2. Considerando Ls=F O
wt
•• wt
Vd=1,35VLL eos a
AV =v __ a_da do TI / 3
vNn
noot=-
3
V=V -v·ti Pn Nn'
wt =o O
Aa
001 = O
a) o
bl
Figura 2.25. Formas de onda considerando ls=O.
Vdo es el valor de la tensión media de salida suponiendo unrectificador no controlado (a=O). Su valor, tal y como se expu-so anteriormente es:
Por otra parte, Aa (figura 2.25) será el área limitada por lascurvas va" y Ve" en el intervalo O:S;wt:S;a.Se ha de tener en cuen-ta que:
b) O
elO
I IJlL..~ __ ld
iC~=i1
a a+u
últ
•. últ
Vall
- Vell
= Vae
= ,(2. VLL ·sen wt Figura 2.26. Circuito equivalente con ls#O y formas de onda.
© ITP-PARANINFO

2·w·L ·dis 11
"
i)a '/1)a'u
a. "
2·w·L,·{,cos(a+u)~cosa- . ,
.....•"2- VLL
[
2·w· L .{ ]u arc cos cos a - s d - a{i. VII.
Se obtiene así:
Integrando en el intervalo o.<(Ot<o.+u:
De aquí se obtiene:
f ...[2. VIL' sen wl ·d(wt) ~I2. w· L,.dia
a. ()El hecho de que la intensidad de corriente se mantengaconstante hace que el nivel medio de tensión de las dos fasesque están conmutando en ese instante adquiera un valormedio "Vpn".
\' .::: \' \'}Jfj (1" LS
ill+ ic = id :: Id = constante
Para calcular la tensión de salida será necesario conocer elárea Al! (recorte de tensión), para lo cual se considerará el inter-valo o.<(Ot<CHu:
divLS~L,.·_1I = v ·dl~L ·di = v,c·d(WI)=L,.·w·di"
J dI LS S 11 4' J
En efecto, si se loma como ejemplo el momento en que larama "e" deja de conducir, la inductancia (Ls) hace que la inten-sidad de corriente "ic" no decaiga instantáneamente. Al mismotiempo, la rama "a" entra en conducción y la bobina de dicharama impide que la corriente '\" aumente rápidamente (figura2,26.c). La suma de ambas cOITientes durante el intervalo detiempo "u" considerado, en el que T, deja de conducir y TI pasaa O es, prácticamente, constante; es decir:
n'u
Puesto que la intensidad '\" varía de cero a Id en los límitespara los que se calcula el área Al!:
'"A fL ·w·di ~w·L.·[i (1 )-i (O)J~w·L .{
It S aSada Sd
()
Teniendo en cuenta que la tensión vpn se repite cada re/3:
Conocido Id Y0., el intervalo "u" puede ser calculado.
Finalmente, en la figura 2.27 se muestra el intervalo de ope-ración del sistema. Se observa que CULlI1dose trabaja con valo-res muy pequeños de Id' la intensidad "id" puede lIeg31'a hacer-se discontinua. El valor de IdB depende de la inductancia Ld yes el límite de intensidad por debajo del cual "i/ se hace dis-continua.
Cuando la potencia a control31' no sobrepasa los 100 KVAaproximadamente, y se requiere operar en un solo cuadrante, sepuede utilizar un reetifieador trifásico semicontrolado en elque cada rama del puente está compuesta por diodo y tiristor, Eneste caso, para un ángulo o. :s; re/3 y un voltaje continuo de sali-da, se puede demostrar que:
IdB
Figura 2.27. Intervalo de operación.
A )V = V _-'_'
da." da. n/3
3·J2V ~-_. V ·cos ada. n LL
Se deduce que la inductancia Ls hace que la tensión de sali-da (Vd) disminuya y, por tanto, se puede asegurar que la tensiónde salida depende de la intensidad de coniente de salida (Id)'
A continuación se determinará el período de conmutación"u" para el intervalo considerado.
P31tiendo de que ia ((O!)+ ic ((01) ~ Id = constante, se obtiene:
di di di di_II+_C=O II e
dI dI dI dI
Por otra palte:
• VdfflLL ~Oo
1,35VLL cosa
id Discontinuar{
Id 3Ls CJJ
¡¡
id Continua-,1
~Id
di di di\' (c)=L ,_11 L ._c=2.L ._aLS S dI s dI s dI
3 .-{2. VLLV, = o (1 +cos a),a. 2n
© ITP-PARANlNFO

_IL=idrot3n211:
Figura 2.29. Tensión de rizado.
81 82\11:9,
o
Vd
b) Valor medio de la intensidad Id'e
1 I IId=-'A=-'¡ id(O)dO=8,84A
n n eb
El valor de la intensidad Id(piCO]se produce cuando vS=Yd; esdecir, para un ángulo igual a re - !:lb:
Id (p;co) = id(n - 0b) = 33,6A
Resolviendo por métodos iterativos se obtiene Sr=2,56 radia-nes, cumpliéndose la condición rcl2<Sr<re y verificándose lacondición inicial de una intensidad fuertemente discontinua.
Tal y como se observa en la figura 2.29, cuando id>IL' Cd secarga y, por el contrario, cuando id<1L,Cd se descarga.
r2 e2
LlVd=~·¡(id-ld)·dt= w-Ic '¡[id(O)-ld]-dOd t, d e,
La elevada diferencia entre el valor de pico y el medio de ides una muestra de la alta distorsión existente.
e) Valor aproximado de Cd para un rizado máximo del5%.
El rizado es la relación entre el valor de pico a pico y el valormedio de la tensión en bomas del condensador.
LlVd s-Vr(%) = --·100<5 % = Ll V < __ d = 7,5 V
Vd d 100
rot
Vd
Cd
+
vd
id icarga-
a)
VL>O
+
b)Figura 2.28. a) Modelo equivalente; b) Formas de onda.
o
Ivsl
-{2vs
SOLUCIÓN:
[!]Un puente monofásico (figura 2.19.a) está alimentado conuna tensión senoidal "vs" de 120Y (60Hz), siendo la impedan-cia de la red Ls=lmH (Ld=O). Suponiendo la intensidad "id"fuertemente discontinua, se pide:
a) Calcular la forma de onda, obteniendo Sb y Sr así como elvalor de pico "Id(piCO)"suponiendo Cd muy grande(vd=Yd=150Y).
b) Calcular el valor medio de la intensidad Id'c) Calcular el valor aproximado de Cd para que el rizado sea
inferior al 5%.
El modelo equivalente del rectificador y las formas de ondason las representadas en la figura 2.28.
Ejemplos Resueltos----- ••...._....:'
a) Sb' 0r y el valor de pico de Id'
Se sabe que en el punto (1) se cumple:
-{l- Vs-sen 8b = Vd ) Vre Sb = arc sen . r;/ = 62,11°= 1,084 radianes
Sb ~ - ,,2·Vs2
Por otra parte, para Sb~S~Sr y teniendo en cuenta quevL=vS-Vd:
1 a 1 aid (S) = -- J vL d8 = -- J (-fi.VsSen S - V) d8 =
wLs wLs"ab "b
I a 1 a= -- '[-~-Vs·cos S] - --[Vd' S]
wLs ab wLs ab
id (S) = - 450, 16·cos 8 - 397,89·8 + 641,89
Para calcular Sr se toma como condiciones:
id (SI)= - 450,16'cas S - 397,89·S+ 641,89 )
ld (SI): ° e/= 1,613- 1,131. cas SI
8/>2
Por otra parte:
iiO))=id(02)=ld=8,84A }iiO) = - 450,16 -cos O - 397,89· 0+ 641 ,89
Mediante métodos iterativos y partiendo de Sb para deter-minar S) y de Sr para determinar S2' se obtiene:
{O) = 1,41 rad = 80,780
O2= 2,49 rad = 142,66 o
Resolviendo la integral:
Ll V = 17,25 <75 V = Cd> 17,25 = 6,1 _10-3 F
d w.C' w.7,5d
m Un rectificador trifásico controlado ( figura 2.30.a) seacopla a la red mediante un transformador de 460Y entrefases (50Hz), siendo Ls=25IlH. Se sabe que la potencia queéste cede a la carga (Pd) es de 500KW y la tensión media desalida (Yd) de 525V. Suponiendo id(t)=Id= constante, calcular:
a) El valor de la corriente media de salida Id-
b) El ángulo de disparo "ex" de los tiristores.
© ITP-PARANINFO

.:. l. Diferencias entre un diodo convencional y otro depotencia.
.:. 2. En un diodo de potencia: ¿De qué depende la ten-sión de ruptura BY BD? ¿Qué se entiende porcorriente de recuperación inversa (lIT)?
.:. 3. Parámetros y límites operativos del tiristor. ¿Quécondiciones se han de cumplir para que un tiristoresté en conducción o en bloqueo?
.:. 4. Posibles formas de cebar un tiristor. ¿Por qué se ledemomina dispositivo semicontrolado?
.:. 5. Importancia de la velocidad de crecimiento de lacorriente (di/dt) y de la tensión (dv/dt) en el fun-cionamiento del tiristor.
.:. 6. Diferencias, tanto de estructura como de funciona-miento, entre un tiristor y un GTO.
.:. 7. ¿Cómo se consigue pasar a estado "OFF" al GTO?Importancia del circuito de disparo de puerta.
.:. 8. Tensión media de salida "Vd" en un rectificador enpuente monofásico y trifásico.
.:. 9. En un rectificador trifásico totalmente controlado:¿Qué importancia tiene el ángulo de disparo "u"en su funcionamiento?
.:. 10. Efecto de la inductancia de línea "Ls" en la tensiónde fase en un rectificador totalmente controlado.
© ITP-PARANINFO

(\' ~ .~uJJ ~rJY!JJ
.,. Clasificar los dispositivos electrónicos utilizados en los equipos de potencia en fun-ción de sus características funcionales y áreas de aplicación.
Describir el funcionamiento de los dispositivos electrónicos de potencia, sus carac-terísticas eléctricas y los parámetros fundamentales que los caracterizan.
Explicar los efectos que la frecuencia de trabajo y las condiciones de temperaturaejercen sobre los dispositivos electrónicos de potencia y las soluciones que se adop-tan en los casos más generales.
•• Conocer los sistemas de disparo y de corte utilizados para el funcionamiento de losdistintos elementos electrónicos de potencia .
.,. Comparar y valorar este tipo de transistores con otros posibles elementos de poten-cia a utilizar en función de la aplicación a realizar.
•• Clasificar por su función los distintos circuitos electrónicos que se emplean en apli-caciones de potencia, indicando el tipo de transformación energética que producen ylas características de cada uno de ellos.
•• En varios casos prácticos de análisis funcional de circuitos y sistemas electrónicos depotencia:
• Identificar los componentes activos y pasivos del circuito relacionando los elemen-tos reales con los ímbolos que aparecen en los esquemas.
• Conocer el princ pio de funcionamiento y características fundamentales de lostransistores MOSF(ET, IGBT y BiT
• Calcular las magnitudes básicas del circuito, contrastándolas con los valores rea-les obtenidos midiendo en el circuito, explicando y justificando dicha relación.
• Identificar la variación en los parámetros característicos del circuito (forma deonda, tensiones) realizando modificaciones en los componentes del mismo, expli-cando la relación entre los efectos detectados y las causas que los producen.
•• Reconocer los parámetros fundamentales y necesarios de los transistores de potenciamediante la utilización de los manuales de características técnicas .
•• Describir con precisión y claridad, el funcionamiento de los circuitos convertidores einversores explicandp las características, tipo y formas de onda de las señales y eltratamiento de las mismas a lo largo del circuito.

• Alta impedancia de entrada (50-100 MQ) lo cual faci-lita el control de cargas de gran potencia con niveles detensión relativamente bajos (de lOa 15V).
o o
AlTUAl IJ lINEAlIZAOA
o -%SVT
iD t
-VDS
VGS5>VGS(.. etc
BVoss
VGS<VT
CORTE
o S
00
VGS2
VGSl
VGS3
1:', CANAL NG o
Figura 3.1. Símbolo de los MOSFETy curvas característicasdel dispositivo de canal N.
VALOR _ VGS·VT=VOSOMHMICO •.• VGS5
ZONA ACTIVAVGS4
3.2. Transistores MOSFET(Metal-óxido-semicondudor)
Existen fundamentalmente dos lipos de transistores MOS-FET, de enriquecimiento o acumulación y- de empobr~ci-miento o deplexión, pudiendo ser cada uno de éstos a su vezde canal N o de canal P. En este capítulo se tratarán sola-mente los transistores MOSFET de acumulación de canal N.En la figura 3.1 se muestra el símbolo de los transistoresMOSFET de acumulación canal N y canal P y las curvascaracterísticas del primero.
iD ~
Son dispositivos capaces de accionar cargas de distintaíndole como puede ser el control electrónico de máquinaseléctricas (motores de CA, motores de CC, motores paso apaso), convertidores (CA-CA, CC-CC, CA-CC, CC-CA), sis-temas de alimentación inintemlmpida (S.A.I.), sistemas deiluminación de alta frecuencia, con'ección del factor de poten-cia, etc. Las excepcionales características de estos transisto-res, les sitúan en una posición muy ventajosa frente a losGTO'S y a los tirislores, lo cual hace que se utilicen en apli-caciones relacionadas con la electrónica de potencia de hasta800 KVA.
Entre las caracterísliciJ.s más relevantes de los MOSFET eIGBT'S con respecto a los transitores bipolares (BJT) se pue-den destacar las siguientes:
• Resultan más simples de excitar que los transistoresbipolares al no requerir corrientes de entrada tan eleva-das, ya que se tratan de dispositivos controlados por ten-sión. mientras que los bipolares se controlan porcorriente (de base), lo cual implicaría utilizar corrientesde entrada muy elevadas para controlar semejantespotencias de carga.
• Alta velocidad de respuesta, lo que supone una granventaja al trabajar en conmutación tal y como lo hacenen la mayoría de las aplicaciones. Sus tiempos de con-mutaciqn permanecen constantes con la temperatura,hecho que no ocurre así con los bipolares. De ahí que enestos últimos los tiempos de conmutación sean mayores.
La tabla 3.1 muestra de forma orientativa los distintosvalores (máximos) de funcionamiento de los dispositivos depotencia más utilizados hoy en día.
3.1. Introducción
3.2.1. Estructura interna yfuncionamiento de unMOSFET de pequeña señal
Básicamente, este tipo de transistores, están formados porun sustrato tipo P en el que se ha insertado dos regiones muyimpurificadas de tipo N: Fuente (Source) y Drenador (Drain)separados entre sí de lOa 20 f.1m(micras).
Tal y como se observa en la figura 3.2, si la tensión depuerta (VGS) es muy pequeña, a pesar de que existe una ten-sión apli.cJlda entre drenador y~uente.-01 os), en la puerta metá-lica se van acumulando cada vez más por-t.ado.reS-de-cargapositiva que ()ri~ un campo eléctrico "E" perpendicularal óxido y dirigido hacia el sustrato. Sin embargo, como latensión VGS es muy pequeña, dicho campo no es capaz deatraer apenas cargas negativas (minoritarios) del sustratohacia el óxido de silicio (debajo de la puerta). Es por ello porlo que la corriente de drenador es muy pequeña (figura 3.2.a).
A medida que la VGS aumenta, el campo eléctrico "E"atrae las cargas negativas del sustrato hacia los puntos cerca-nos a la capa del óxido bajo la puerta, formándose una capade inversión o "canal" por enriquecimiento o acumulación(figura 3.2.b). A través de este canal podrá circular unacorriente que irá de fuente a drenador si se aplica una tensiónVos positiva.
• Debido a que la resistencia interna en conducción (Ros)tiene un coeficiente positivo de temperatura (conduc-ción por portadores mayoritarios) permite la conexiónde éstos en paralelo, lo cual quiere decir que si aumentala temperatura aumenta su resistencia interna (Ros) detal forma que al estar conectados en paralelo ésta se veráreducida a la mitad y, por tanto, aumenta la corriente acontrolar (io)' En los bipolares sucede totalmente locontrario, la conducción es por minoritarios y el coefi-ciente de temperatura en este caso es negativo.
• Buena capacidad para soportar sobrecargas (picos decorriente aproximadamente tres veces superior al valornominal).
Tenei6n Intensidad Margen d.(A) Frecuencia (HzI
TRSTOR 5000 fS;200Hz
G1'O 3000 200Hzs;fs;1 KHz
8JT 1000 1KHzs;fs;10KHz
MOSFET 1000 100KHzS;fS;1 MHz
r lOIn' 11 KHzS;fS;75KHz
MCT 1KHzs;fs;20KHz
© ITP-PARANINFO

El valor de VGSpara el cual existe una corriente apreciable(iD) se denomina tensión umbral (VT o VGS(lh»)y será la ten-sión para la cual se crea el canal (de 2 a 5V).
Si se aplica ahora una tel)sión VDS(figura 3.2. e), existenlas condiciones necesarias para que circule una corriente "iD",de forma que para pequeñas tensiones de Vos el dispositivo secomporta como una resistencia controlada por la tensión depuerta VGS' Se trata de la zona lineal u óhmica en la cual laresistencia entre drenador y fuente (RDS) es constante.
Como quiera que el canal no posee una conductividad infi-nita, a lo largo de éste se produce una caída de tensión VDS'lo mismo que en cualquier resistencia. Dicha caída de tensión(con respecto a masa) es muy pequeña en el extremo de lafuente y va aumentando de forma lineal hacia el extremo deldrenador, de tal forma que ésta se opone a la tensión VGSy elcanal va adquiriendo un potencial cada vez mayor con res-pecto a masa. De esta forma la diferencia de potencial entre lapuerta y el canal (hacia el extremo del drenador) va siendomenor, lo cual quiere decir que la concentración de portado-res generados disminuye al acercamos al drenador y, portanto, la sección del canal se reduce en esta zona. Se diceentonces que el canal se ha estrangulado (pinch-off) y estoocurre cuando VDS=VGS-Vr (figura 3.2.d).
Puerta deG metal
VGS.::;.VT=4V AisladorS D
al N 8+8+ 8 N iDSouree 8+ 8+ Drain -10 A VDS=20V10
P 8+ 8+ 8+ 8+Substrato
GVGS=12V ++++++;++++++++ Canal N
SD-------------- iDb) N --8 ---G----B-
- -8- DA VDS=OV
P
GVGS=12V ++++++¡++++++++
S D------------- iDe) N ==§l-e=~-- 8-- N5mA VDS=2V
VDS__
Si la VDSsiguiera aumentando, la corriente "iD" ya no cre-cería más debido a que se ha estrechado el canal y se man-tendrá constante. El transistor se encuentra en la zona activa(también llamada de saturación por la saturación del disposi-tivo). En esta zona la intensidad de corriente "iD" es indepen-diente de VDS(figura 3.2.e) y se debe cumplir:
I vosl> I Ves V r I
3.2.2. Zonas de funcionamientodel MOSFET de acumulaciónde canal "N"
Al igual que en los transistores bipolares existen tres zonasde funcionamiento (figura 3.1).
3.2.2.1. Región de corte -<
Para que el transistor se encuentre situado en esta zona defuncionamiento se ha de cumplir que VGS:S: VT' En estas con-diciones la corriente de drenador es nula (io=O).
3.2.2.2. Región óhmica o linealPara que exista intensidad de corriente, el transistor ha de
estar en conducción y, por otra parte, se ha de cumplir la ade-cuada relación entre las diferentes tensiones para que seencuentre en zona lineal.
{Ves> Vr - Para que es té en cond ueción
Ves-Vr"'Vos"'O - Para que esté en zona lineal
En esta región, la intensidad de drenador no es nula y vale:
,[ V~]lO =2·K· (Ves - Vr)' VoS--2- -g",'( Ves- Vr)
donde K depende de la geometría del material y g", es la trans-conductancia.
También es posible expresar la corriente de drenador de laforma:
donde RDS(ON)=f(VGS)'
En esta región, el transistor se comporta como una resis-tencia dependiente de VGS' de forma que si VGSaumenta laresistencia Ros (O ) disminuye.
3.2.2.3. Región activa (saturación de canal)
D
20mA VDS=8V
D
20,5mA VDS=30VN
N
N
N
GVGS=12V
S
GVGS=12V
Se)
d)
Figura 3.2. Estructura y polarización de un MOSFETdeacumulación de canal N.
El transistor ha de estar en conducción y se han de cumplirlas condiciones para que esté situado en esta región de fun-cionamiento:
© ITP-PARANINFO

invertida de electrones libres cuando VGS = VT' En la figura3.4 (c) se puede comprobar que para VGS > V1" a medida quese aumenta Vos' el canal se va estrechando debido a que laconcentración de portadores en esta zona va siendo menor,por lo que llega un momento en que la corriente "io" deja deaumentar (zona lineal) de manera que cuando Vos = VGS - VT
el canal adquiere una forma constante y la intensidad decorriente iD también permanece constante.
{
V(;s> V r . Para que c!-.té en Lona de conducción
VfJs> Veis VI? O Para que esté en zona de saturación de canJI
En cuanto a la intensidad de drenador, ésta será de laforma: in = K· (V0S - VT )2. Ecuación válida tanto para MOS-FET de pequeña señal como de potencia, donde:
K=IJ,,'Cox'W
2·L
siendo: • /lll la movilidad de los portadores de carga.• Cox la capacidad de puerta.• O) la anchura del canal.• L la longitud del canal.
al
VGGl
-1111-'- --1
+ + i +
Limite capade deplexión
Si02
3.2.3. Estructura básica de unMOSFET de potencia
La figura 3.3 muestra la estructura de un MOSFET depotencia de canal N con una estructura interna orientada ver-tical mente de cuatro capas (n+ -p - n- - n+).
VGG2
$i02
Puerta conductora(Gate)
Body-sourceshort
p(bodyl
n(región driftl
~ 1 Parásito• BJT
Fuente(Souree)
• iDl' J p(bodyl
~ Canal(Gatel T DiodoIntegral
e)
VGG3
Si02
~o_~_e_~_~_§l__~_~_~ __~_~ __~_~ __~:-- -~---Capa de inversióncon electrones libres
VGG3>VGG2>VGG1
Drenador(Orain)
Figura 3.4. a,b) Formación de la capa de deplexión. c) La capa de inversióninterfiere con el SiOz cuando la tensión puerta fuente aumenta.
Figura 3.3. Estructura interna de un MOSFETde potencia.
Al igual que en los MOSFET de pequeña señal, al aplicaruna tensión positiva entre puerta y fuente, la superficie de sili-cio situada debajo de la puerta se convierte en un "canal" ocapa (se acumulan e-). Ello se debe a la acción del campoeléctrico perpendicular al óxido que se produce en esta zona,llegándose a conectar por medio del canal el drenador con lafuente.
Además, se puede comprobar la existencia de un transis-tor bipolar parásito (NPN) entre los contactos del surtidor ydel drenador. De conducir este transistor, aparecerá una inten-sidad de drenador en momentos en que el MOSFET deberíaestar en OFF. Dicha conducción se produce cuando:
el VDS> V LJEjwrtbi/o (ON)
dI R(;'C~s
3.2.4. Características de conmutaciónTal y como se observa en la figura 3.5, entre cada uno de
los terminales de un MOSFET de potencia existe una ciertacapacidad. Si bien la capacidad Cgs puede considerarse prác-ticamente constante, no sucede lo mismo con el resto de capa-cidades C"d y Cds . Por tanto, los tiempos de retardo son pro-porcionales a dichas capacidades.
La capacidad C d varía en función del estado de conduc-ción del transistor aebido a la capa de inversión, siendo tantomayor cuanto más lo sea "io". Dicha figura muestra tambiénel circuito a tener en cuenta para el estudio de las formas deonda, así como la variación de Cgd en función de VDS'
Cgd •
- vosVGS=VOS 200V
Cgdl
rCgd - cP ,D-I(VGSI
Cgd
I ~ RDS(oolG o G o
Cg' - Cg,
al b) e)
Figura 3.5. Modelo de un MOSFETpara análisis transitorio: a) Circuitoequivalente para la región de corte yactiva¡ b) Circuito equivalente en laregión óhmica¡ c) Variación de la capacidad puerta.drenador en función
de la tensión drenador-surtidor.
De ahí la imp0l1ancia de limitar la pendiente ajustando la RG.
Para minimizar la posibilidad de que este transistor entreen conducción, la capa tipo "P" suele ser más ancha del ladodel drenador que en el surtidor, formándose así un diodo pará-sito del lado del drenador llamado diodo inverso de recupe-ración que se aprovecha a veces en configuraciones tipopuente como más adelante se tratará.
La figura 3.4 (a y b) muestra como se ensancha el canal amedida que aumentamos la VGS llegándose a formar una capa
© ITP-PARANlNFO

- t
- t
VGS(th)
iG(t)
t2=RG(Cgdl +Cgs)
VGS(lo)
t2=RG(Cgd2+Cgs)/
VGS(t)
o
En un transistor MOSFET existen tensiones que nunca debensuperarse:
• VGimáx): Máxima tensión de puel1a admisible (25-30Y).Debido a su elevada resistencia equivalente de puerta(MQ) se pueden acumular cargas estáticas fácilmente, porlo que los MOSFET modernos suelen llevar un zener deprotección.
• BV DSS: Máxima tensión permitida entre drenador y fuen-te. Este valor depende del grado de dopado de la región(n-), sin olvidar que un aumento de BY oss produce otroaumento de resistencia Ros y, por tanto, una disminuciónde la corriente de drenador máxima permitida. Cuando eltransistor trabaja en conmutación se debe tener sumo cui-dado en no sobrepasar este valor debido a los picos de ten-sión que se producen, sobre todo si se trabaja con cargasinductivas.
Figura 3.7. Formas de onda tensión-corriente de un MOSFETcuandoentra en corte (suponiendo el diodo inverso ideal).
Ltd(Off)
I !---------_--V'OS(t)
--J7~~ ,Vd
o l , trvl __o trv2 t tfi ----~--
~ - te T -
3.2.5. Límites de funcionamiento.,Area de operación segura
Tal y como se observa en la figura 3.8, el área de operaciónsegura (S.OA.R.) está limitada por tres factores:
• iD (máx) (a 150°C).• BVDSS : Tensión de ruptura Yos'• ~máx: Máxima temperatura de la unión.
En dicha región se pueden apreciar los elevados valores decorriente de pico así como los tiempos para los que la potenciagenerada por un impulso puede ser tolerada de forma segura porel dispositivo, sin peligro de destrucción .
• log(iO)
- t
- t
lo
t2=RG(Cgd2+Cgs)
, VOS(on)
tfvltc---~
: - "¡Carga de Cgd: Carga de Cgs+Cgd :, ,I tfv2 I
I ;-~~ -:
-+VDS(tl :: I :, ,,,
tl =RG(Cgdl +C9S)
Figura 3.6. Formas de onda tensión-corriente de un MOSFETcuandoentra en conducción y conectado a una carga inductiva (suponiendo
el diodo inverso ideal).
OV
td(on) f--
+Vd
VGG
La figura 3.6 muestra las distintas formas de onda tantopara el circuito de puerta como para el drenador. Se observacómo la tensión de disparo de puerta YGG varía exponencial-mente debido a Cody Cgs' Tal y como se acaba de ver, la capa-cidad Cod varía con la tensión Yos' por lo que en el momentoen que el dispositivo entra en conducción la YGS se ve afecta-da por la capacidad Cgd2. Una vez que Yos ha caído hasta elmínimo de su valor para el cual: Yos = io·RosJoN)' la YGS
continúa su crecimiento exponencial hasta YGG(Cgd2),
Existe un tiempo de retardo llamado td (ONl que es el tiempoinvertido en alcanzar la tensión umbral Yr El paso de corte asaturación del transistor tiene lugar en dos intervalos, de formaque el transistor se encuentra trabajando durante un tiempotfvl(Cgdl) en la zona activa y durante otro intervalo de tiempotfv2(Cgd2)en la zona óhmica. Se denominará tri al tiempo reque-rido para que el transistor entre de lleno en conducción y alcan-ce el valor nominal de intensidad de drenador (io)' Por otraparte, el ritmo de caída de la tensión Yos es igual a:
3.2.4.1. Formas de onda de activación(turn-on)
El hecho de que durante un intervalo de tiempo igual atfv,+tfv2' la tensión YGS permanezca constante, permite podercontrolar con RG la pendiente de caída de Yos'
VGS(lo)
VGS(th)
3.2.4.2. Formas de onda de desactivación(turn-off)
En la figura 3.7 se muestran las señales para el caso de desac-tivación del MOSFET. En ellas se aprecia también la influenciade las diferentes capacidades tanto para las intensidades decorrientes como para las tensiones.
iO(max)
10.5 seg
10.4 seg
10-3 seg
OC
- 10g(VoslBVoss
Figura 3.8. Área máxima de funcionamiento seguro.
© ITP-PARANINFO

3.2.6. Estabilidad de temperaturaUna de las ventajas de estos dispositivos está en sus tiempos
de conmutación, los cuales son muy estables, sobre todo si secomparan con los de los bipolares. Los tiempos de conmutaciónson esencialmente independientes de la temperatura de opera-ción, no así con los bipolares que incrementan sus tiempos deconmutación cuando trabajan a las máximas temperaturas per-mitidas.
Se puede decir, por tanto, que la estabilidad de los MOSFETse debe a que sus tiempos de conmutación dependen fundamen-talmente de la capacidad de entrada Cgs y ésta es independientede la temperatura.
La resistencia Ros (ON) posee un coeficiente de temperatura(a) positivo, dependiendo de los valores de tensión máxima delelemento (BY oss y YGs(máx)). Se cumple, por tanto, que:
RDS(ON) (T) __(1 +~)~25"C----~- ; siendo 0,6 ~ a ~ 0,9RDS(Tc=25°C) 100
3.2.7. Pérdidas de potencia.Consideraciones térmicas
Las pérdidas de potencia se pueden expresar de la forma:
P T ~ PON + P OFF + P sw
donde: • PON son las pérdidas de potencia en la conducción.• POFF son las pérdidas en bloqueo.• Psw son las pérdidas en conmutación.
La mayor parte de ellas se producen en conducción, ya queen bloqueo y en conmutación son prácticamente despreciables.
Las pérdidas en conducción son: PON = iD2 • Rf)S(ON)' donde
ROS{ON) depende principalmente de la temperatura y, en menormedida, del valor instantáneo de la intensidad de corriente dedrenador, de la tensión YGSy de BY oss.
La causa de que Rd aumente se debe a que en la región tipon- no se puede producir modulación de conductividad (se nece-sita aporte de electrones y de huecos en la misma proporción,pero en un MOSFET tipo N los portadores mayoritarios son loselectrones).
De forma aproximada, Rd '" K· (BVossP. Esta es la razón porla que no existen MOSFET que trabajen simultáneamente conaltas tensiones e intensidades. Será necesario, por tanto, elegirentre una u otra.
De manera aproximada, las pérdidas en bloqueo y en con-mutación se pueden estimar entre un 15 y un 20 % de las pérdi-das en conducción, sobre todo cuando se trabaje en conmutaciónno así en choppeado.
Para una señal de disparo YGSde frecuencia "j" (véase figu-ra 3.9), se tiene:
1PON = P DM' D = i¿. RDs (ON)
PDM ~ i,5' ~DS (Tj:"á) = iD' VDS(ON) (Tjlllá,)
"0l1láX T C - P DM Z{/¡(JC)
donde: • POM es la máxima potencia de drenador.• D es la relación de servicio (Duty Factor).• Tmax es la máxima temperatura de la unión.• Tc es la temperatura de la capsula.• ZthIJC) es la resistencia térmica de la unión cápsula.
10°
10-'
10-2
o.L,
103
~ 10-4
10-6 10-5 10-4 10-3 10-2 10-' 100 lO'1, Uuración del pulso de la onda cuadrada (segundos)
Figura 3.9. Variación de la impedancia térmica en función de la duracióndel impulso de disparo del MOSFET.
En la figura 3.10 se muestra el circuito térmico equivalente yla disposición de los elementos en el disipador de calor.
Temperatura ambiente (Ta)
+
Potencia Taperdida
Figura 3.10. Circuito térmico equivalente de un MOSFETy situaciónde los elementos en el disipador de calor.
donde Rth son las resistencias térmicas, expresadas en °C/W, lascuales son:
• Rth·c es la resistencia térmica unión-cápsula y depen-de ~el tipo de encapsulado.
© ITP-PARANlNFO

3.3.1. Estructura de un IGOT decanal N. Funcionamiento
Resistenciaregión ·OriW
Orenador
9
OSurtidor (Fuente)
Puerta
O
Surtidor (Fuente)
a) b)
Figura 3.12. Circuitos equivalentes de un IGBT.
simultáneamente, consiguiendo así el control de grandes poten-cias (IMVA) con tensiones de puerta relativamente bajas (de 12a 15V) y grandes frecuencias de conmutación (hasta 75 Khz).
Tal y como se indica en la tabla 3.1, actualmente existen enel mercado IGBT'S capaces de soportar hasta 2.000V(500A).Resulta, por tanto, un elemento idóneo para el control de gran-des potencias, tal y como puede ser el control de motores, tantode c.a. como de c.c. y para aplicaciones de suministro de poten-cia, equipos de soldadura, etc. Combina la alta velocidad de res-puesta con una ancha área de operación segura y con una bajatensión de saturación.
La figura 3.12 muestra el circuito equivalente de un IGBT,válido en condiciones normales (a) y aquél que tiene en cuentael efecto del transistor parásito (b). En ella se puede observarque un IGBT mezcla características de transistor BIPOLAR yMOSFET simultáneamente.
Una importante ventaja de estos dispositivos se debe a quellevan incorporados unos diodos de recuperación muy rápidos,lo cual permite disminuir los tiempos de conmutación.
Tiene menores pérdidas de conmutación y de conducción quelos MOSFET, ya que mejora muchas de sus características, talescomo la facilidad de excitación, la máxima corriente de pico, lacapacidad de puerta y la resistencia drenador-surtidor. Un IGBTes más rápido que un BJT. Sin embargo, la velocidad de con-mutación del primero es inferior a la de un MOSFET.
Resumiendo, se puede decir que, al igual que un transistorMOSFET se trata de un elemento bidireccional en corriente yunipolar en tensión, es decir, capaz de soportar la circulación decorriente en ambos sentidos y tensión de una única polaridad.
Tal y como se observa en la figura 3.13, su estructura difieremuy poco de la de un MOSFET, radicando su principal diferen-cia en la capa (p+) que forma el drenador (coLector) del IGBT;es decir, se le añade una capa (p+) que suministra los huecosnecesarios a la región (n').
Este elemento posee internamente un tiristor que, debido a suestructura minimiza el peligro de que entre por sí solo en con-ducción. La capa (n+) situada entre la (p+) (drenador) y la (n')no es estrictamente necesaria para el funcionamiento del dispo-sitivo. En el supuesto de que carezca de dicha capa se dirá quese trata de un IGBT simétrico; en caso contrario será asimétrico.
El dopado de dicha capa (n+) mejora el funcionamiento deldispositivo, pues disminuye la caída de tensión en conducción yel tiempo tOFF'
Drenador
Resistencia . . v'., 1"0';0" r.e:::w J K
1 f 11-' ¡ ¡
]'. iD (Rcanal) ,
Puerta o . I L __1°
RDS(ON) 3~ -+ ~_. --Por Unidad I IMOSFET¡
100V ~~
21·_
VGS=10V .I.--+- "---- ""'t.- -
i MOSFET! I1400V
I VGS=20V
I1 r----- ·1
I M;'SFj VGS-lOVI100V
O . l _......L _ ..
O 20 40 60 80 100Corriente nominal iD @ Te = 25°C %iDM
Figura 3.11. Variación en tanto por ciento de iD / iOMcon RDS(ON)con 1(=25 0(,
Se puede decir que este tipo de dispositivos reúnen las carac-terísticas de los transistores BIPOLARES y de los MOSFET
• R¡lIcs es la resistencia térmica cápsula-disipador ydepende del tipo de aislante (mica, silicona, etc.).
• R¡lIsa es la resistencia térmica disipador-ambiente.
El fabricante, generalmente, suele dar información acerca de:
• ~(",axr" máxima temperatura de la unión permitida.
• iDM: máxima corriente de drenador en forma de pico.
• R¡lIjc Y R¡lIcs
• iD (Tc=25°C)
• Gráfica de la impedancia térmica en función del impulsode disparo.
• Variación en tanto por ciento de iDI iDM con respecto a RDS(Ver figura 3.11).
Existen varias razones por las cuajes se pueden utilizar estosdispositivos en paralelo, tanto integrados en un mismo encapsu-lado como conectados externamente:
• Se reduce la RDS(ON)'Por una parte al aumentar la tempe-ratura la resistencia también aumenta y, por tanto, lacorriente dismjnuye y se restablece el equilibrio; por otra,al estar conectados en paralelo, la resistencia se quedareducida a la mitad y la corriente a controlar aumenta.
• Se reduce la inductancia LDS(del orden de nH).
• Aumenta la iD'• Mejora el comportamiento térmico.
Debido al encapsulado que presenta el drenador y la fuente,se origina una "inductancia parásita" que, en ocasiones, gene-ra sobrepicos de tensión que pueden limitar la velocidad deconmutación.
3.3. Transistores IGBT'S
3.2.8. Funcionamiento en paralelode los MOSFET
© ITp·PARANINFO

Su funcionamiento es muy similar al del MOSFET de formaque cuando la tensión VGS>V Th (tensión umbral) se forma unacapa de inversión debajo de la puerta (G) que une la regióndrain drift (n-) con las zonas source (n+). Circula entonces unacorriente de electrones a través de esta capa de inversión que ori-gina una importante inyección de huecos desde la región drain(p+) hasta drain drift (n"). En este caso, desde drain (drenador)hasta source (surtidor) se tiene solamente úna unió¡:¡pon.
La unión formada por (n")-(p)-(n+) que constituye la capa deinversión, recoge los huecos inyectados desde el drenador (p+) yfunciona, por tanto, como si se tratase del colector en un tran-sistor bipolar. Los huecos inyectados o repelidos desde (p+) serecombinan en la región drain drift (n") y en la capa inversa conlos electrones. Aquéllos que no se recombinen alcanzarán laregión de fuente (source), existiendo, por tanto, una corrientedesde el drenador a la fuente. Es esta inyección de portadores laque baja la resistencia de la región (n-), lo cual hace que dismi-nuya la caída de tensión en conducción y, por tanto, se podráhacer circular grandes intensidades de corriente, cosa que nopodía alcanzarse con un MOSFET.
nos por los que circulan los huecos en la región drain drift. Ellose debe a que algunos huecos procedentes de la capa p+(drena-dar) no se recombinan y van hacia la fuente, originándose así laIBIPOLAR.Si esta corriente es suficientemente grande, el tiristorparásito puede dispararse y entrar en conducción (cortocircuitoentre fuente y drenador). Existe, por tanto, una componente decorriente que circula lateralmente a través de la región body queorigina una tensión lateral y que cae en la resistencia óhmica deesta capa. El valor de dicha corriente es aproximadamente iguala: IBIPOLAR= K- iD'
Si esta tensión es suficiente, se origina una inyección de elec-trones desde source a body que puede ser capaz de activar lostransistores parásitos npn y el pnp; se dice entonces que el tran-sistor ha entrado en IATCHUP. Una vez que el transistor entraen IATCHUP ya no se puede controlar la intensidad con el cir-cuito de puerta y la única forma de salir de esta situación es cor-tando la corriente. Una forma de evitar este problema es hacien-do lento el Turn-OFF, para lo cual será necesario colocar laadecuada resistencia de descarga en el circuito de puerta. Lacondición para evitar que el tiristor parásito entre en conducciónconsiste en cumplir la condición:
Figura 3.13. Estructura interna de un IGBl de canal N.
• D e
G ..J~! G· II~s o E
VGS4
VGS3iD.
VGS2 JVGSl
VGS4>VGS3> VGS2> VGS 1- VDS o - VGS
BVDSS VGS(lh)
La característica tensión-corriente para un IGBT de canal Nse muestra en la figura 3.14. La tensión inversa VRMpuede lle-gar a ser tan alta como la tensión que se pueda aplicar directa-mente si el dispositivo fuese construido sin la capa (n+). La ten-sión aplicada entre drenador y surtidor cae en J2 por lo quesolamente circulará una pequeña intensidad de fugas.
3.3.2. Características de conmutación
l· < VBE (QparásilO) ON .D ------, Donde RLATERAL ~ Body región resistence
RLATERAL
Figura 3.14. Símbolos de un IGBl de canal N, característica tensióncorriente y curva de transferencia.
• El intervalo.~2 que es debido a las cargas acumuladas enla región drift (n-) [BJT].
Aunque las características son muy similares a las de losMOSFET, se puede destacar que en el transitorio OFF~ON la
En la figura 3.15 se observan las características de conmuta-ción, tanto para el Turn-ON como para el Turn-OFF. Quizáuna de las diferencias fundamentales es que para asegurar elTurn-OFF se aplica un nivel de tensión negativo en la puerta yque por lo que respecta a la corriente "iD" ésta tiene durante elTurn-OFF dos intervalos distintos:
• El intervalo t¡il que corresponde al Turn-OFF de unMOSFET.
Puerta
Si02
Capa de inyección
Capa Buffer
Región Drain drift
Puerta
Región Body
Puerta
n-
Drenador
Orenador
Drenador
n+
p+
p+
n+
p+ El El El El
J2
Jl
La caída de tensión en el IGBT (debida a RDS)varía muypoco con la temperatura, pues si por una parte el MOSFET tieneun coeficiente de temperatura positivo, ese efecto se compensacon el coeficiente negativo de temperatura de la caída de tensiónen la región (n"), por lo que la variación es mínima.
La activación no deseada del tiristor parásito que forman losdos transistores pnp y npn, tiene mucho que ver con los cami-
© ITP-PARANINFO

o +Vdo +Vcc=+12V
+Vcc=+12Vo
o RL
4 8 lt--
RG I~ ••••Ul3 -c::J I
6 555lO n
MOSFET
_ C2-100nF10nF
,-------
.LCl T
EntradaO
O+Vd
I
BDX53) l O RL
Rl n 10K I R3 nlK ~ 01 ~N4~~8 I'!I lf 1
11RG ,•• j f
1 8>1'-' . ~m ••• ~' I MOSFET
R2 ~ 10K OP07 BDX54 I I Cl TloonF
.J.'Figura 3.16. Circuito de disparo basado en A.O. OP07.
El circuito de la figura 3.17 utiliza un Cl. 555 trabajandocomo disparador Schmitt (asimétrico: 1/3 y 2/3 de Vcc).Dicho circuito funciona en los flancos de bajada de la señal deentrada y la corriente de entrada al transistor (iG) estará limi-tada por las características del propio circuito integrado y dela resistencia RG.
La utilización de ambos circuitos únicamente tiene sentido enaplicaciones de baja velocidad de conmutación y ésta dependeráde la velocidad de subida y de bajada de ambos integrados, sibien se ha de tener en cuenta que el primero de ellos generamayores corrientes de puerta (iG) que el segundo.
El circuito de disparo es la etapa existente entre el circuitogenerador de la señal de disparo y la puerta del elemento depotencia en cuestión. Un posible circuito de disparo se muestraen la figura 3.16, el cual utiliza un amplificador operacional(OP07) y dos transistores en simetría complementaria. El ampli-ficador operacional trabaja como comparador de nivel, de talforma que cuando la señal presente en la entrada no inversora(+) supere la existente en la entrada inversora (-), la salida deéste pasará a nivel alto (+12V), el transistorQI se saturará y, portanto, el MOSFET conducirá. En el caso opuesto, Q1 se pondráal corte y el MOSFET no conducirá.
Entrada o
VGG+
Corriente BJT
Corriente MOSFET
lo
VDS(on)
+Vd
VGG-
TURNO "OFF"
I II IItfi1 I., .,
I
I trv'-II,I,III
+Vd
I II II I
tdloff) -f.--i--II
Figura 3.15. Características de conmutación de un IGOl
o
o
iDlt)
oVDSlt)
VGS(t)
o
iDlt)
VGS(t)TURNO "ON"
variación de tensión (L1VDS)es mayor en ellGBT que en el MOS-FET. Por lo que respecta al transitorio ON40FF existe un tramode iD(tfi2)que en el MOSFET no existe. En este tramo tenemosuna tensión elevada, por lo que a pesar de que iD ya no es muyalta, las pérdidas son considerables. El tramo de caída rápida de laintensidad iD(tr,1) corresponde a IMOSFETque decae rápidamente,mientras que el otro tramo (tr,;>corresponde a IBIPOLAR' Este es elmotivo por el cual el tiempo de conmutación del IGBT es casi tanalto como el de un BIPOLAR(ON-OFF)
oVDS(t)
3.4. Técnicas de excitaciónde los MOSFET e IGBT'S
Los MOSFET Y los IGBT'S se utilizan, en muchas ocasio-nes, en aplicaciones de potencia a elevadas frecuencias (PWM),las cuales exigen corrientes de puerta no demasiado altas (altaimpedancia de entrada) para poder conseguir rápidas velocida-des de conmutación y, por tanto, menos pérdidas.
-Figura 3.17. Circuito de disparo basado en CI. 555.
Cuando el surtidor del transistor a controlar no va conectadodirectamente al punto negativo de la tensión de alimentación dela carga RL o se desea controlar el transistor superior de unarama de un puente inversor (monofásico o trifásico), lo que sehace es introducir una alimentación flotante (+V1) y colocar unoptoacoplador para aislar la señal de disparo con el objeto de noproducir un cortocircuito (figura 3.18).
© ITP-PARANlNFO

Figura 3.18. Circuito de disparo con optoacoplador.
I R2
2 ~_~~~:6 ~ ~~ O 1O;__~1_1 O 330n I .••••.
o 1 I 1 ~I RG'. ~
Entrada 1,"". ~..I.. ) 1,6--L~J' . ~ I ¡• ••• ~ I MOSFET
3 , I 1,40106 elo 1 I -100nF
, Al ,: I : 5 • OV,L ~
En la figura 3.19 se utiliza el optoacoplador 6N137, muchomás inmune que el 6N136 y para incrementar la corriente depuerta "iG" se utilizan puertas lógicas capaces de suministrar laadecuada intensidad de corriente. Al aplicar un impulso positi-vo en la entrada, a la salida de la puerta AND se obtiene un "unológico" y el transistor del optoacoplador conducirá, con lo que ala salida de la puerta inversora habrá otro "uno lógico", el tran-sistor QI conducirá y, por tanto, el MOSFET también lo hará.
o +Vd1
R4 02400 A5 O 12 n
BC337 BDXS3
1.• 02 ~ O:G IGBI~- •••••
J c::J t~
1_...: 1212 av -
03 os..:l.-- OBC327 BDX54 7" RL
+Vl=+15V o
OV o
6N136 8 R2 OSK2 f-----------------l Al Dl0K .
Entrada i T ~..•.. i 6 R3 024ll.
o 3 L--------------15~j r.. 01 IBC547
Figura 3.20. Driver para el control de IG8l o GlO.
-Vl=-15V o
principio de funcionamiento del circuito no difiere demasiadode los anteriores, en el sentido de que un impulso positivo de laseñal de entrada coincide con la activación del elemento depotencia y viceversa.
En la figura 3.21 se muestra un semipuente con circuitoexcitador incorporado, diseñado para tensiones del bus decontinua (Yd) menores de SOY. Utiliza dos MOSFET IRFS40(IOOY, 27 A).
o+Vdo+Vl=+12V
JSuponiendo que Y(QA +) está a nivel bajo, el transistor QI no
conduce mientras que Q2 si lo hará, por lo que QA + entrará enOFF. Por su paIte, la tensión Y(QA')=YC¡(QA') estaI-áa nivel altoy, por tanto, el MOSFET (QA') se pondrá en ON. La conducciónde QA' provoca que el condensador CI se cargue a través de R;y DI con una constante de tiempo:
((R3+R4)'Rs,- ----- ·cR3+R4+Rs 1
El valor máximo de la tensión de carga de dicho condensadorserá:
VI VVCI(máx)~ ( y '(R3+R)~14V
R3+R4+Rs .
Tanto D2 como ZI no conducirán ya que las tensiones en lapuerta de QA + y en el drenador de QA' son prácticamente nulas.
"',I
~--- ------- ,,,,,,,,,,,,,,I
o+Vd=24V
~33KR2 RS ~2011DI
lN400~ • .LcOA+
_ 22nF
R4 O lK2 1
..A...DA+D~oOllR3 loan ..•c::J 1 1
I 02 ~ZlRl 33K AlBDSS3 13V
I o SALIDA CARGA
VIOA+I o c::J KOlBe547 I Cl -~
VlOA+1 !D2 ..A...lOpF .Lc
LJ~ lN4007 - 22nFI
O ~OOllV(OA-I~ •.
OA~ ,."DA~
VGlOA·) o 1I
o •••OV
Figura 3.21. Rama de un inversor con circuito de excitación.
Figura 3.19. Circuito de disparo con optoacopladory alta inmunidad al ruido.
Por su parte, el circuito de la figura 3.20 muestra el "driver"idóneo para el control de un IGBT o de un GTO, los cuales sesuelen poner en OFF con una tensión negativa. En este caso el
Por el contrario, si Y(QA +) está a Illvel alto y Y(QA') está anivel bajo, el transistor QI se satura y Q2 entra en corte. Comoconsecuencia, QA + entrará en conducción (ON) y QA' en corte(OFF). La carga anterior de CI hace que la tensión puelta surti-dor de QA + sea alta, pues la corriente que circula ahora por R4 espequeña al estar Q2 cortado y D2 bloqueado. El diodo D2 blo-
© ITP-PARANlNFO

~ t
-t
Vcontrol tI I • t
VA 1I I • t
VD t e ~ • t
VB 1, ,, , I ,
i II r= • t
VA-VB
Figura 3.25. Formas de onda representativas del circuito de la figura 3.24.
Figura 3.24. Driver completo mediante transformador de impulsos.
Zl RG I~ oI- ~I-~ 1"- o, I~ ~ r c::J _I,j
J tvsec C2 TVC2
I c>-I" LO .~ l
Vsec
El condensador C hace que a la salida del buffer se manten-ga un nivel medio de tensión continua Ve que evite la saturacióndel transformador. Cuando la relación de servicio supere el 50%,el voltaje en la puerta no es suficiente para disparar el elementode potencia, tal y como se observa en la figura 3.23.
Un circuito, más completo, con transformador de impulsosque puede ser empleado es el representado en la figura 3.24,cuyas formas de onda más representativas se indican en la figu-ra 3.25.
RG1 :a.~(=I '1 _
e
Vco +Vcc
o
o --r------Figura 3.22. Driver con transformador de impulsos para O ., D ., 0,5.
Vcontrol
Para aquellas aplicaciones de suministro de potencia DC,donde la relación de servicio "D" (duty cycle) esté comprendi-da entre O y 0,5 se puede emplear el circuito de la figura 3.22.
Los transformadores de impulsos poseen un bobinado prima-rio y uno o dos secundarios. Cuando poseen dos secundariospermiten obtener señales de disparo para excitar transistoresconectados en serie o paralelo. Estos transformadores, general-mente, deben tener una inductancia de fugas muy pequeña y eltiempo de subida del pulso de salida debe ser también pequeño.Con un pulso relativamente largo y una baja frecuencia de con-mutación, el transformador se saturará y la señal de salida apa-recerá distorsionada.
quea la tensión (positiva) VGSIya que sino ZI entraría en con-ducción. DI impide que CI se descargue por Rs-
En el supuesto de que la carga fuese de tipo inductivo, pue-den aparecer picos de tensión negativos en la puerta debido a laconmutación de los transistores MOSFET. En este caso ZI seencargará de limitar dichos picos negativos para no sobrepasarla máxima tensión negativa de puerta.
Una de las ventajas de este circuito es que no necesita ais-lamiento de la señal de puerta. Las redes "snubber" que secolocan en paralelo con el elemento de potencia (C=22nF yR= I00 Q) tienen el objetivo de evitar problemas de sobreten-siones (dV/dt) debidas a las inductancias parásitas y a losbajos tiempos de conmutación.
También se puede emplear, en lugar de un elemento óptico(optoacoplador), un transformador de impulsos como aisla-miento eléctrico para los circuitos de excitación (driver). En estecaso no es necesario utilizar una fuente de tensión aislada tal ycomo sucedía en los casos anteriores.
Figura 3.23. Formas de onda en el circuito de la figura 3.22.
Vsec •
~I_~-
Vsec •
3.5. Reducción del picode corriente inverso
Tal y como se observa en la figura 3.26, variando la resisten-cia de puerta RG(ON)se modifica la pendiente de la intensidad decorriente que circula por el diodo ya que de alguna manera sehace que el transistor entre a conducir antes o después, con locual ambas pendientes serán iguales pero de signo contrario.Cuando el transistor se pone al corte también es posible hacerque la descarga del pico de corriente inversa dure lo menos posi-ble colocando una resistencia RG(OFF)'
Si el diodo inverso de libre circulación del elemento depotencia es suficientemente rápido hará que el transistor entre enconducción antes pero originará un pico de corriente mayor. Si
DutyeyeleD = 0.3
DutycyeleD = 0.5
~ t,
I(
~ t
la' Vee . (,-DII-i--~¡
__l+=eeD- ~t
__ ---c=-~_-_---~~vc_
_1-Ir---I- ---+ -
Voltaje desalida Buffer
Voltaje desalida Buffer
© ITP-PARANINFO

L'.IL
IIL I
II
1211
iL12
11
L./2 1, =L /1IL = r = L-/1ILVd V,,= 1
11 11 V - Vti (J
La corriente "iL" decrece lineal mente desde 12 hasta 1I en elintervalo de tiempo t2, por lo que:
donde ~IL = 12-11 es la cOITientede la componente ondulatoria(perturbación) pico a pico de la bobina L. Igualando el valor de"~IL" en las ecuaciones anteriores, se o tiene:
(V[ V,) Vo~/L= ----./ =-'/~L 'L-
~t
dir (RGOFF)dt
trr
diDf (R )-- GON
dt
Figura 3.26. Reducción del pico de corriente inverso.
lo que se desea es prolongar la entrada en conducción del tran-sistor será necesario aumentar la resistencia de carga RON'conlo cual se disminuye también la pendiente del diodo ya que amedida que uno entra en conducción el otro lo va dejando (pen-dientes iguales pero opuestas).
Figura 3.28. Forma de onda de il en un convertidor reductor.
iO tio [------------------
------------------------
3.6. AplicacionesA continuación se tratarán algunas de las aplicaciones más
representativas de los transistores POWER-MOSFET eIGBT'S.
3.6.1. Regulador 'reductorDC-DC (BUCK)
El regulador reductor es un circuito en el que el voltajemedio de salida "Vo" es menor que el voltaje de entrada "Vd'"de ahí el nombre de '~.L~ductor".En la figura 3.27 aparece el cir-cuito a estudiar, el cual utiliza un transistor TGBT.
Q id iL + vL io"lIII
~rv-YY"\L ,+
Vd T I Co~trol I ••••• D, v.J.. eIVoO R
I c~TI
Vcantrol
va=vc12-1011-10
vLVd·Va
I I I
O(aN) D1(ON) I I
I I II I
-
Ts I I II
Figura 3.27. Convertidor reductor (Buck). Teniendo en cuenta el concepto de relación de servicio (D):
/1 = D'Ts; /2= (I-D)'T5
r 1V = V ·--D· V
(J ti T dS
En el supuesto de que las pérdidas sean nulas: Vd·ld=Vo' 10= D· Vd' lo; la corriente promedio de entrada "Id" seráigual a: Id= D· [o' El período de conmutación Ts se puedeexpresar como:
El funcionamiento del circuito se divide en dos partes; la pri-mera tiene lugar cuando se conecta (conduce) el transistor Q,donde la corriente de entrada circula a través de la bobina, delcondensador y de la carga. La segunda tiene lugar cuando sedesactiva el transistor y se pone a conducir el diodo. En este casola cOITiente"iL" no puede cambiar instantáneamente su sentidode circulación; ello hace que dicha corriente circule ahora através de la propia bobina, del condensador y de la carga. Lasformas de onda correspondientes a los voltajes y a las corrientesen regimen permanente aparecen en la figura 3.28.
Suponiendo que la corriente que circula por la bobina "iL"
aumenta linealmente desde 1, hasta 12 en el tiempo ti y recor-dando que la caída de tensión en una bobina vale vL=L·(di/dt):
V,,'( l-D)
fs'L
© ITP,PARANINFO

Modo 2
Figura 3.30. Modos de funcionamiento del convertidor elevador (800st).
iL,id + - D1(OFF)____ rY"'V"""Y\ . o o
~
IL , iC io
IQ(ON)I
-'- - RVd _ C
1_
Suponiendo que la corriente que circula por la bobina (iL)aumenta linealmente de II hasta 12 en un tiempo ti y decrecelinealmente desde 12 hasta II en un tiempo tz, se tiene que:
12-/1 ~/L ~/LVd=L'--=L'--= tl=L'--
ti ti Vd~/L ~/L
V - V = - L· -- = t2 = L· --d o t V-V
2 () d
donde ML = 12-11 es la corriente de la componente ondulatoria(perturbación) pico a pico de la bobina L. De las ecuacionesanteriores se deduce que:
.LC_ C
I
D1(ON)• Q-----{)
oQ(OFF)
o
Modo 1
iL,id +~ rY"'V"""Y\
Vd _1_ L
~ V = Vo' (Vd- V) = _V_o_'(_l-_D_)_
e S ·ec· Vd'f/ f/-S'L'C
Suponiendo que la corriente de la componente ondulatoria dela carga "~io" es despreciable frente ~iL=~ie' la corriente pro-medio del condensador "Ie"que circula para tll2+tz12=Ts/2, esigual a: le=~I/4.
El voltaje de la componente ondulatoria pico a pico del con-densador "~Y e" valdrá en este caso:
Ti2 A 1 T) UL S'~/L ~/L
~ Vc=vc-vc(!=O)=cJ-4-dt= S'C - S·C-!.o s
Este regulador tiene una alta eficiencia y además el di/dt dela corriente de carga está limitado por la corriente de la bobinaL. Como regla prática a fin de maximizar la eficiencia, el perío-do mínimo de la señal de control, debe ser aproximadamente delorden de 100 veces mayor que el tiempo de conmutación deltransistor; por ejemplo, si el transistor tiene un tiempo de con-mutación de 0,5 Ils, el período de la señal de control debe ser de50 Ils (fs=20KHz). Esta limitación se debe a las pérdidas porconmutación en el transistor, las cuales se incrementan con lafrecuencia de conmutación y como consecuencia de ello la efi-ciencia se reduce. El voltaje de control a aplicar en el circuito depuerta, se obtiene al comparar el voltaje de salida con su valordeseado.
!'3.6.2. Convertidor elevadorDC-DC (80051)
Como su propio nombre indica, se trata de un regulador ele-vador (figura 3.29) en el cual el voltaje de salida es mayor queel de entrada y que utiliza como elemento de potencia un tran-sistor MOSFET.
. + vL _ D1'd. ;Lt~~l~~ajll-+ I
Vd ---- l. vDSI Control I -I
Figura 3.29. Convertidor elevador (800st).
El funcionamiento del circuito se puede dividir en dosmodos. El primero de ellos comienza cuando se activa (condu-ce) el transistor Q. La corriente de entrada "iL" aumenta lineal-mente circulando a través de bobina L y del transistor Q demodo que Yd=YL. El segundo modo comienza cuando se des-conecta el transistor, momento en el cual como "iL" no puedecambiar de sentido instantáneamente, se produce una f.c.e.m.entre extemos de la misma que hace que la corriente circuleahora a través de L, C, la carga R y el diodo DI' La corriente eneste caso decrece lineal mente hasta que se vuelve a activar en elsiguiente ciclo el transistor; de esta forma la energía almacena-da en la bobina es transferida a la carga. Los circuitos equiva-lentes para estos modos de funcionamiento se muestran en lafigura 3.30 y las formas de onda correspondientes a los voltajesy corrientes en la figura 3.31.
R
Vd·tl (Vo - Vd)-t2 (t.1 )~I =--=----= V =V· )+-L L L o d t
2
Teniendo en cuenta el concepto de relación de servicio (O),el voltaje medio de salida (Yo) vale:
t) = D· Ts; t2= (1- D)' TsTs Vd Vo- Vd
Vo =V '-= -- = D =---d t
21- D V
o
En el supuesto de que las pérdidas sean nulas:Yd·ld=Yo·lo=Yd·IJ(I-O), la corriente promedio de entrada "Id"será igual a: Id=lo·O/(l-O). El período de conmutación Ts sepuede determinar a partir de:
l L'~I L'~1 L·~/·VTs =_= ti + t2=--_L + L = L ()
fs Vo-Vd Vd (Vo-V).VdV'(V-V) V'D
= ~ 1 = d o d =_d_L fs·evo f
S'L
Cuando el transistor está activo, el condensador suministra lacorriente de carga para t=tl. La corriente media del condensadordurante el tiempo ti es le=O y el voltaje de la componente ondu-latoria de pico a pico "~Y e" es:
t t1 I 1 I lo' ti
~ Vc=vc-vc(t=O)=cJ Icdt=CJ lodt=---c-=o O
Vo - Vdti = Ts- t2= --- =
fs' Vo
© ITP-PARANINFO

• io
~ R
io
iD
• iC
iC •
-C.,..
Modo 2
Modo 1
iL
D1(ON)j 0--0
'LQ(OFF)o o
D1(ON) iL,id Q(OFF)0----0 .- • o o
Vd T
L
~
+
Vd -=-I
Figura 3.33. Modos de funcionamiento del regulador reductor·elevador.
modo 1, el transistor Q está activo y el diodo DI está polarizadoinversamente. La cOITientede entrada, que aumenta linealmen-te, circula a través de la bobina y del transistor. Durante el modo2, el transistor se pone en OFF y la corriente que circulaba através de la bobina sigue su sentido de giro pero ahora a travésde L, C, DI Y la carga. La energía almacenada en la bobina setransfiere a la carga y la corriente que circula por la bobina vadescendiendo hasta que se vuelve a activar Q. Los circuitosequivalentes para los dos modos de trabajo se muestran en lafigura 3.33. Las formas de onda se indican en la figura 3.34.
~--_~ t
lo
iL1211
·D ¡':: -----
iC12-10 ,
VQ=VC
io l=-=-=-=-=-=-=-=-=-===-=--=-=-=_IO ~ t
Vconlrol I tt_11~==~12 =====.F·'
vL I 'Vd
l F'~1
Vo-Vd I - ~----
Figura 3.31. Formas de onda del convertidor elevador (Boost).
Al igual que el anterior regulador tiene una eficiencia alta (unsolo transistor). El voltaje de salida resulta muy sensible a loscambios durante un ciclo de trabajo (O) y puede resultar difícilde estabilizar el regulador. La corriente media de salida serámenor que la de entrada en un factor de (1-0).
3.6.3. Regulador reductor-elevador(BUCK-BOOST)
Suponiendo que la corriente que circula por la bobina (iL)aumenta lineal mente de 11 hasta 12 en un tiempo ti y decrecelinealmente desde 12 hasta Ilen un tiempo Lz, se tiene que:
donde ~IL = 12-11 es la corriente de la componente ondulatoria(penurbación) pico a pico de la bobina L. Teniendo en cuenta larelación de servicio (O):
V ·D VV = __ d__ = D= __ 0_
o 1- D Vo- Vd
Este regulador (figura 3.32) suministra un voltaje de salidaque puede ser menor o mayor que el de entrada, de ahí el nom-bre de "reductor-elevador"; además la polaridad del voltaje desalida es opuesta a la de entrada.
D1
• Si D>O,5• Si D<O,5
ElevadorReductor
Figura 3.32. Regulador reductor·elevador (Buck·Boost).
Vd
Q id... .....iD...• -----.
oVconlrol
iC io •.
Suponiendo las pérdidas nulas: Vd·ld= -Vo·lo=Vd·lo0/1-0, lacorriente promedio de entrada "Id" será igual a: Id=lo,O/l-O. Elperíodo de conmutación Ts se puede determinar a panir de:
1 L-!1/ L'!1/ L·(V-V)'!1/T - = 1 + 1 = L L = o d L
S j' 1 2 V V V 'VS ti o o d
V 'V Vd'D!1 / = d o
L ('L'(V-V) "s'L. s () d J.
Al igual que en los dos reguladores anteriores, el funciona-miento del circuito se puede dividir en dos modos. Durante el
Cuando el transistor está activo, el condensador sumjnistra lacorriente de carga para t = ti' La corriente media de descarga del
© ITP-PARANlNFO

VdVCI=~-
I-D
iL2.• L2
rv-v-Y"\VL2 + i 1-
C2- voD R
iC,ro.l+
Modo 2
Modo 1
Cl
11iL 1•...
V·//11 = __ d_1
LI LI
Igualando:
L 1rv-v-Y"\
I + VLl -
Vd-
Ll iL1.,. Cl ..iL2L2
~ ~I- Irv-v-Y"\~ --¡1+ VLl - VL2 +
00 ~ RVd - 01 C2=
!, 1 iC2 io ,+ J•...
directamente y el condensador CI se carga a través de LI. Deesta forma, el funcionamiento del circuito se puede dividir endos configuraciones o modos. La primera comienza cuando seactiva el transistor Q (t=O). La corriente aumenta a través de LIy simultáneamente el voltaje del condensador CI' que polarizainversamente al diodo DI' se descarga a través de Cz y L2.
La segunda empieza cuando se desconecta Q, el condensadorCI se carga a partir de Vd Yla energía almacenada en Lz se trans-fiere a la carga. El condensador CI es el medio para la transfe-rencia de energía de la fuente a la carga. Los circuitos equiva-lentes para ambas configuraciones se muestran en la figura 3.36.
Suponiendo que la corriente" iu" aumenta linealmente deIUI hasta luz en un tiempo ti y debido al condensador CI decre-ce linealmente desde luz hasta IU1en un tiempo Iz, se tiene que:
/Ll2-ILII /1/LI /1/ILIVd=LI' t -LI'-t-= ti =LI -v-
lid
/11L1 /1/LIv-v =-L '--= IZ= L '---d CI I 1 I V _ V
Z d CI
. t
•• t
D
Is
I I I II I I I-
------- ~~-----I I I I
;01 __ f lo
Vo=VC
iC
12-10
-Vd
-lo
Figura 3.34. Formas de onda del regulador reductor-elevador.
vL+Vd
v,,"''"' 1=.. tl=.bd. T'~'
iL
1211
iD12
11
~3.6.4. Regulador CUCK
condensador es Ic=lo y el volt~e de la componente ondulatoriade pico a pico ",-1Vc" es:
'1 '1I f I f 10'11
1'1 Vc=- led1=- lodl=-e e eo o
Al igual que el regulador "buck-boost", el regulador Cúck(figura 3.35) proporciona un voltaje de salida que puede sermenor o mayor que el de entrada y la polaridad del voltaje desalida es opuesta a la de entrada.
Figura 3.36. Modos de funcionamiento del regulador Cúck.
Si se repite el mismo proceso ahora para la corriente iL2, seobtiene:
vV = __ 0
CI D
Figura 3.35. Regulador Cúck. Igualando ambas expresiones de VCI se obtiene:
Cuando se conecta el voltaje de entrada Vd' en ausencia de laseñal de control del transistor Q, el diodo DI queda polarizado
D'VV = d
o I-D
© ITP-PARANlNFO

• I
,,,,,/o
"/ ,I I
IQC+ l' Io----J~ ..••••.DC+
VAS
+Vd
-1/3Vd
-2j3Vd
·Vd
QA+¡:..J "DA+~,j
iCiB •.. C • w
~ s ---vA -
I rOOQA l' as· I~ :;¡¡¡¡¡¡;:DS. oc- I~ f DC- ••• :;¡¡¡¡¡¡;:DA- Motor
~¡ \ .1. 3-n /
./
N OV
to t1 t2 t3 t4 t5 t6
VSn
En la figura 3.39 se muestran las diferentes formas de ondacuando las señales de control en las puertas de los transistoresson las especificadas.
Si se realiza el análisis durante el intervalo de tiempo to ~ t ~tI'conducirán los transistores QA+, Qc + y QB', siendo el circuito aestudiar el de la figura 3.40.a.
VGS+
VGA+
VAn
2J3Vd
1/3Vd
Figura 3.38. Puente trifásico con transistores MOSFET.
VGA-
VGS-
VGC-
___ ,.- +Vdid_
VGC+
En la figura 3.38 se muestra un puente trifásico construido apartir de transistores MOSFET de potencia, al que se le ha aco-plado una carga resistiva conectada en estrella. Dicho puente sepodría construir igualmente a partir de IGBT'S u otro elementode potencia de similares características.
Al circuito convertidor se le encomendará la tarea de produ-cir tensiones alternas (monofásicas o trifásicas) de frecuenciafija o variable, así como tensiones continuas en el supuesto queasí se desee.
3.6.5. Convertidor lrifásicocon MOSFET
,Ó,ILl
• 1
• 1
Is12
, I
I D1(ON) I
11
·Ve
iL1
iL21
iL22
iL2
iC2
iCl
vL2
+VC1-Vo
-Va=Vd=VCl
vL 1
+Vd
Cuando el transistor Q está desactivado, CI está cargado porla corriente de entrada durante un tiempo t = ~. La corriente pro-medio de la carga para CI es ICl= Id Y el voltaje de la compo-nente ondulatoria será:
1, 1, Il . I d'/2~ VC ~ - J I C dt~-J Id dt~--
I CI o I Clo
CI
~ V ~ Id' Vd ~ I,¡" (1 - D)CI
C,Is'(Vd- V) fs'CI
Finalmente, suponiendo que la componente ondulatoria de lacorriente de carga .!lioes despreciable, ML2=iC2;la corriente pro-medio de carga del condensador C2, que circula durante el tiem-po T/2 es IC2=Ll]L214 Yel voltaje de la componente ondulato-ria del condensador C2 será:
~Q ~n~1 ~II J 1 J L2 L2~ V =- I d/=- --dt=---
c, C c, C 4 8· C .F20 20 2Js
V" .( I - D) Vd . D~ Vel = - ----- -----
8· e 'f2'L 8'C'f 2'L2 s 2 2 s 2Las formas de onda del regulador Cúck son las que se mues-
tran en la figura 3.37.
Si se supone un circuito sin pérdidas: Vd·Id=-Vo·Io=Vd·1o·D/(I-D), la corriente promedio de entrada "Id"será igual a: ]d=]OD/( I-D). El período de conmutación Ts sepuede expresar por una parte como:
1 LI • VCI . ~ I LI Vi ( Vd - VC I )Ts - ¡'S ~ ti + /2~ - -----= ~I LI ~ - -----
Vd'(Vd- Vc/) fs'LI'VCI
Figura 3.37. Formas de onda del regulador Cúck. Figura 3.39. Formas de onda del puente trifásico con MOSFET.
© ITP,PARAN/NFO

El resto de los intervalos de tiempo se analizarían de formasimilar. Si la carga estuviese conectada en triángulo, el circuitosería el representado en la figura 3.40.b para el mismo intervalode tiempo (to:::; t :::;t/) y las tensiones compuestas, en estas con-diciones serían:
Conviene recordar:
.Pfi=3·Py
• Potencia aparente: S = f3. V . I
• Potencia activa: P = f3. V· I . cos <p• Potencia reactiva: Q = f3. V· I . sen <p
donde Ve 1 son los valores eficaces de las tensiones y corrien-tes de línea y qJ es el desfase existente entre ambas.
Las formas de onda en el supuesto de una carga inductiva,como puede ser un motor de c.a. conectado en estrella, son ahoralas mostradas en la figura 3.41. Si la carga fuese resistiva, losdiodos de recuperación no conducirían, no siendo así en el casode una carga inductiva.
VAnVAnl (fundamental)
VAN A
El diagrama de fases del circuito está representado en la figu-ra 3.40.c. Dispositivos
conduciendo: DA+
iA
+Vd
iA 1 (fundamental)
~ t
+Vd
--~j'.----¡iC ¡O RDS(OC+)
! C
al
A
+Vd<
b)
Figura 3.41. Formas de onda de tensión y corriente en una ramadel puente inversor con carga inductiva.
3.6.6. Convertidor (Puente en "H")con carga indudiva
A continuación se realizará el estudio de un convertidor(puente en H) para una carga inductiva (figura 3.42). En el casode un motor de corriente continua, el cos qJ no será la unidad,sino en torno a 0,6-0,8.
OV o
VCA VCn(iC)
VBn(iB)
e)
VBC
VAB
+Vd o----:r ~ TIQA+I~ ±DA+ as+ ; ~D"o-JB L o J, r
QA ~ t':'~ ~DS
Figura 3.42. Puente en "H"con carga inducliva.
Figura 3.40. Circuitos equivalentes para análisis (Ig~t;tl)Y diagrama de fases.
Cuando la carga es de carácter resistivo iA' iB e ic estarán enfase con VAn' V Bn y V Cn' respectivamente. Si por el contrario, lacarga es de carácter inductivo existirá un desfase entre las ten-siones de fase (simples) y las corrientes de fase (cos <p),el cualvariará en función de las características de la carga.
© ITP-PARANlNFO
Si se controla la corriente que circula por la carga (io) en unsentido haciendo que, cada cierto tiempo, conduzcan los transis-tores QA + y QB' (choppeado) y soltando durante otro tiempo,sucederá lo siguiente:
Supongamos que QA + y QB' se encuentran conduciendo. Sien un instante determinado se sueltan (se ponen al corte), lacorriente '\" no se hace cero instantáneamente, sino que entreextremos de la carga se produce una fuerza contraelectromotrizque hace que la energía almacenada entre extremos de la bobi-

Figura 3.43. Formas de onda ITurn·ON" de un MOSFETen una ramadel puente, modificadas por el efecto del diodo inverso de recuperación
y con carga inductiva.
Suponiendo que QA+ y QB- dejan de conducir, en ese momen-to DA' Y Os + entran en conducción. Si a continuación se pone enconducción la otra rama (QA- y QB+) y se estudia el comporta-miento de QA-' tal y como se observa en la figura 3.43, al prin-cipio de '\;", la corriente iDP=JO decrece con la misma pen-diente y al mismo tiempo que la intensidad de drenador iD(t) deltransistor que va a entrar en conducción aumenta. Llega un
o SASE (S) o EMISOR(E)
•oC 10,um nt 10'9 cm-3
~:pn SJT
15-20 /1m, p 1016 cm-3
1OE 50-200/lm n- 10'4 cm-3r pnp SJT
lc 250/lm n+ 1019 em-J
al b) COLECTOR(C)
Figura 3.44. Transistor bipolar de potencia: a) Símbolos;b) Estructura interna BJTNPN.
S o
momento en el cual el diodo °A-entra en su zona inversa '\/' yla corriente que circula por la carga será ahora la suma de lacorriente del propio transistor (QA-) y de la corriente inversa derecuperación del diodo DA-. Finalmente, pasado este tiempo, lacorriente por la carga se estabiliza (tvI1)'
S o
3.7. El transistor bipolarde otencia (8J1)
Este tipo de transistor bipolar se utiliza en aquellas aplicacio-nes de media y baja potencia, si bien en baja potencia compmtemercado con los transistores MOSFET tratados anteriormente.
Un transistor de potencia posee baja ganancia de con'iente ynecesita que la intensidad de base se mantenga continuamentedurante el estado de conducción, pero no requiere de circuitosque le fuercen a la conmutación de estado.
Pueden trabajar con frecuencias de conmutación de hasta 10KHz, tensiones de 1.000 Y e intensidades de corriente de 700 A.Por el contrario, no soportan tensiones inversas. por lo que losdiodos de protección inversa se hacen necesaJ;os.
3.7.1. Estructura y característicasEn la figura 3.44 se muestra la estructura interna de un tran-
sistor bipolar NPN así como sus símbolos.
Los transistores bipolaJ'es de potencia presentan durante laconmutación un fenómeno complejo conocido como efecto desegunda ruptura (second breakdown effect). Si la ruptura poravalancha se denomina primera ruptura (first breakdown), lasegunda ruptura se puede definir como la ruptura de la unióndebido a efectos térmicos (calentamientos) localizados.
La primera ruptura puede deberse a un aumento excesivo deuno de los tres parámetros siguientes:
• BYCEO:Tensión de ruptura directa colector-emisor (baseabierta).
• BYCBO:Tensión de ruptura directa colector-base (emisorabierto).
• BYsus: Tensión de ruptura por un aumento excesivo (sus-tained) de la corriente de colector y de la tensión colector-emisor.
Debido a la diferencia de portadores que atraviesan la uniónbase-colector, se cumple que: BYsus<BY CEO<BYCBO'
- I
_ I
- I
iD(t)
VGS(I)
lo
na se descargue a través de OA-Y Os + (se pondrán a conducir) yque dicha corriente no cambie de signo. Si se tardase un ciertotiempo en poner de nuevo en conducción a QA+ y Qs-' la energíade la bobina se descargaría totalmente, empleando un tiempoque depende de la impedancia de ésta.
Si durante un tiempo relativamente corto ponemos de nuevoen conducción a QA+ y Qs-' la intensidad de corriente directa(iDF)que circula por los diodos OA-Y Os + disminuirá, a la vezque la corriente que circula por QA+ y Qs- aumentará de talforma que, en la rama "A", la pendiente de bajada de °A-es lamisma que la de subida de QA+ ya que el hecho de que QA+ entreen conducción hace que la con'iente '\" que circula por la cargase deba, en su mayor parte, a este último y, por tanto, la otra dis-minuya al mismo ritmo.
De esta forma sucede que, por una parte, el diodo DA-haentrado en conducción en su zona inversa y, por otra, QA+ enON, con lo cual se producirá un pico de tensión debido a que seestá produciendo un pequeño cortocircuito.
A veces es necesario que los transistores tengan un '\/' muypequeño con el fin de que ese pico de con'iente producido por eldiodo de recuperación que deja de conducir dure lo mínimoposible, al igual que, en otras ocasiones, conviene prolongar laentrada en conducción del transistor de la rama correspondienteque entra en conducción para disminuir el pico de corriente porla carga, aunque esto sea a costa de aumentar el tiempo de con-mutación. No olvidemos que estos transistores admiten picos decOITientede hasta tres veces su valor nominal.
Generalmente, se suele procurar que los transistores trabajenen conmutación, tal y como se estudiará en el siguiente capítu-lo. En la figura 3.43 se indican las formas de onda de un MOS-FET en una rama (A) del puente modificadas por el efecto deldiodo inverso.
iDF(DA-I'
o
io ,
Irro
tri
VGS(QA+I'
VGS(lo) r I
,...tvfl~VGS(th) ,
o,
VDS(QA+) • tvf2
+Vd,
o . ,,, le~
© ITP-PARANlNFO

-t
- t
-t
VCE(sat)
r
¡IB(on)
--l.-- --_ t
VBE(on)
tf,VBE(off)~-
, :~ ttrv2"; I,...-
I+Vd
j
II I
-t
O
,B(t) •ot~IIII
vBE(t)
O
al
iB(t)
IB(on)
o
vBE(t)
o
III
VBE(off)1 I
~iC(t) ¡ I IFVJ~¡----~:-IO---
o I I
vCE(t)' :tM..+Vd
iCtt_'_O __ --~_-~~_vCElsat)
Figura 3.47. a) Transitorio OFF-ON¡ b) Transitorio ON·OFF.
En la figura 3.46 se representa la variación de p y VCE(sal)enfunción de la corriente (dc) de colector.
En la figura 3.47 se muestran las formas de onda, tanto parala activación como para la desactivación, del dispositivo.
b) o
3.7.2. Características de conmutación
Debido a las capacidades internas (CCBy CSE)' el transistorno se activa de forma instantánea. Conforme el voltaje VSEaumenta, la intensidad de corriente de base lb hace lo propio,mientras que la corriente de colector Ic no responde de inme-diato. Existe un retraso conocido como tiempo de retraso"td(ON)"antes de que fluya cualquier intensidad de corriente delcolector. Este retraso es el tiempo necesario para cargar la capa-cidad de la unión B-E a la tensión de polarización directaV SEtO ) (aproximadamente O,7V). Una vez transcurrido estefiempo, la corriente del colector se eleva al valor de régimen per-manente (lo). El tiempo de elevación ''t,;'' depende de la cons-tante de tiempo determinada por la capacidad de la unión B-E(deben acumularse portadores de carga en la región no).
Por último, será necesario un tiempo '\v1" para eliminar laregión de carga espacial de la unión B-C que estaba fuertemen-
3.7.2.1. Transitorio OFF~ ON
-vCE
log(IC)
Ruptura primaria---
IIB5>IB4. etc.
ICmáx
Ruptura secundaria/
Cuasi· saturación
IB4
IB3 REGiÓN ACTIVA
IB2
IBl
IB=OO
= ICmáx10
Figura 3.46. Variación de ~ y V(E(Solt) en función de la corriente (de)de colector.
iC •
Saturaciónprofunda
BV /~ 1 1sus BV CEO BV cso
Figura 3.45. Característica tensión·corriente de un transistor NPNbipolar de potencia.
lag ((3)
f3máx
Sin embargo, la ruptura secundaria se produce cuando la ten-sión colector-emisor y la corriente de colector aumentan excesi-vamente, de tal forma que esta última se concentra en unapequeña área de la unión de colector polarizada inversamente.La concentración de corriente forma un punto caliente (falta deuniformidad en el reparto de corriente) y el dispositivo se des-truye térmicamente. Este tipo de ruptura podrá presentarse tantoen el turn-on como en el turn-off.
En la figura 3.45 se representa la característica tensión-corriente de un transistor NPN bipolar de potencia.
Al igual que en el transistor bipolar de pequeña señal existentres regiones de operación: saturación, corte y activa.
En la región de corte el transistor está desactivado o lacorriente de base no es suficiente para activarlo. Sus dos unio-nes (colector-base y base-emisor) están polarizadas inversa-mente.
En la región activa, el transistor actúa como amplificador, detal forma que la corriente de colector es la de base, amplificadaen función de la ganancia del dispositivo y la tensión colector-emisor disminuye al aumentar la corriente de base. En estas con-diciones la unión colector-base posee polarización inversa y labase-emisor polarización directa.
La región de saturación se caracteriza por que la corrientede base es lo suficientemente alta para que el voltaje colector-emisor sea bajo y el transistor actúe como un interruptor. Ambasuniones tendrán polarización directa.
Lógicamente, las ecuaciones por las que se rige este tipo detransistores son las mismas que para el transistor bipolar depequeña señaL
© ITP-PARANINFO

VCE
- log(vCE)
Ruptura secundaria
VBE(sat)+
VBC(sat)
+
o E
+Vd
~ Re
~ Re
n-
IC
n+
n+
p
• Ruptura secundaria.• BVCEO: Voltaje máximo de mantenimiento.
ICM
Figura 3.50. Área de operación segura.
,3.7.4. Area de operación segura
oCFigura 3.49. Sección vertical de un BJI
Se trata de la región (figura 3.50) que encierra todos los pun-tos de trabajo (ic' vCE)del transistor en los que éste no COlTepeli-gro de destrucción. Dicha área está limitada por los siguientesparámetros:
• ¡CM: Intensidad máxima de colector.• T¡: Temperatura en el silicio: 7j = P" . RTH + Tamb, siendo:
P" = vCE' icRTH:Resistencia térmica entre el silicio y el entorno .
• Tamb:Temperatura ambiente.T .. - T bT - P R +T ~P . - Imax {1m
jmáx - "máx TH (1mb "max - RTH
En un transistor bipolar conviene mantener la ganancia decorriente "~"e1evada (del orden de 15 a 20), de ahí que no sepuedan mantener intensidades muy elevadas.
Cuando el transistor trabaje en modo pulsado (pulsos muybreves y espaciados), cuanto más breve sea el pulso, el área deoperación segura aumentará. Al igual que sucede con el MOS-FET y el IGBT, el fabricante facilita en la misma gráfica el áreade operación segura en función de la anchura del impulso quecontrola el transistor.
Carga almacenada
'REGiÓN ACTIVA"
"CUASI SATURACIÓN"
~~, •...__., Base virtual
~
~
" '''SATURACIÓNPROFUN ..OA /' 02• ....!.......'\\\\'\,\'~
-~"\ .
- . ,.."" ' Limite saturación';r ,p,ofunda
Base virtual
Figura 3.48. Distribución de cargas.
01
Distribuciónel exceso de
electrones
Oistribuciónal exceso de
electrones
Oistribuciónb) exceso de
electrones
VBE
08
__ n+ I=::J ~
3.7.3. Pérdidas en conducción
Suponiendo que el transistor, inicialmente, está conduciendoen saturación profunda (iB' ic' vBEpositivas), en el momento enque la corriente de base iBcomienza a caer, la tensión vBEtam-bién lo hace levemente, pero es la tensión vCEla 'que-comienzaa aumentar pasado un tiempo "ts" (storage) o tiempo de alma-cenamiento necesario para eliminar el exceso de portadoreshasta el límite de la saturación profunda.
Por su parte, "trv1" es el tiempo necesario para elimjnar elexceso de portadores desde el límite de la saturación profundahasta el límite de la región activa; '\v2" es el tiempo necesariopara formar la región de carga espacial en la unión B-C y "tfl"es el tiempo necesario para eliminar el exceso de portadores enla región de base.
Partiendo de la figura 3.49 en la que se representa la secciónvertical de un transistor bipolar de potencia (BIT) se obtiene:
{p =/·V
ON C CE(wr)
VCE(wr)= VBE(,l'lIr)- VBC(SlU)+ Vd+/C'(Re+Rc)
La diferencia VBE)sat)-VBC(sat)suele ser del orden de O, l a0,2 V. En cuanto al termino óhmico Ic·(RE+Rc)' también tomavalores bajos. El término Vd es el de mayor contribución ydepende del grado de saturación.
te polarizada en inversa (descarga de CCB)' Asimismo se deno-minará ''t¡-v2''altiempo necesario para acumular exceso de porta-dores en la región n' para pasar de cuasi saturación a saturaciónprofunda (iB aumenta y ~ disminuye). En la tigura 3.48 (b) sepuede observar que, una vez que la unión B-C quede polarizadadirectamente existe exceso de portadores en la región n- y la ten-sión VCEcae fuertemente.
3.7.2.2. Transitorio ON~ Off
© ITP-PARANINFO

3.7.5. Circuitos de disparo
3.7.5.1. Control con una sola fuente dealimentación (+VBB)
Consta básicamente de un comparador (figura 3.SI) que noes más que un transistor en colector abierto, de tal forma quecuando la señal de control (Vcontrol)supere a la tensión de refe-rencia (Vref:::I ,5V), dicho transistor (Qc) se satura y, por tanto,los transistores QB y Q también conducirán (ON). Por el contra-rio, cuando Vcontrol<Vrefninguno de los transistores entrará enconducción (OFF).
3.7.5.1.2. Estado "OFF" (Vcontro/<Vref)En este caso Qc estará cortado y, por tanto, QB también e
1,=0. El hecho de que la tensión VBE(O ¡>Ohace que se genereuna intensidad de base negativa a través de R2, cuyo valor es:
3.7.5.2. Control con dos fuentes dealimentación (+ VBB ; -VBB)
o +VBB I +Vd
A3 O O_con Q = css+
.--¡Rl _ AB 10('·';DI.
I ./
Vref ~- UC3707 I OB+Cd
R4 O~oo
~o TIVcontrol o -- -CBB-
o -VBS-Figura 3.52. Control con dos fuentes de alimentación.
Cuando Vcontro,>Vref'el transistor Qc entra en corte (OFF),mientras que QB+ se satura (QB- en OFF) y, por tanto, eltransistor Q estará saturado (ON). La corriente de base de esteúltimo transistor en estado de conducción, considerando1B(ON)::: 1Csal (QB+)' será de la forma:
+v -v .-v1 ss CEsal (Q.) SE (ON)
S(ON) Rs
Para asegurar, tanto la puesta en "ON" del transistor depotencia "Q", como la puesta en "OFF" a través de dos circui-tos independientes, se suele utilizar el circuito de la figura 3.S2.Cabe la posibilidad de insertar un condensador "Con" que per-mita introducir un pico de intensidad al inicio del transitoriopara acelerar el paso OFF-tON. Generalmente el valor de +V BB
suele estar comprendido entre 8 y ISV; -V BB entre -s y -7V yVref::: I,SV
loDI
lB
~,,,,,,,,
i :i/"
R2
Rl
11
ts
b)
OB
a)
VBE~
o ,Oe(en) :-------.
'"~o
Figura 3.51. a) Circuito de disparo con una sola fuente;b) Formas de onda "turn off".
Vref
Vcontrol
En el caso contrario (Vcontro'<Vref), el transistor Q estará cor-tado ya que QB- está ahora conduciendo.
3.7.5.1.1. Estado "ON"(Vcontro/>Vref) >< .. .,La saturación del transistor Qc implica, tal y como se ha des- 3.7.6. Circuitos de protecClo~
crito, que QB también conduzca, lo cual hace que la corriente 1, (SNUBBERS)se reparta entre 12 e lB' hecho que produce la saturación de Q.Partiendo de esto:
Por tanto:
3.7.6.1. Snubber "TVRN-OFF"Mediante este circuito se pretende conseguir que, a medida
que la tensión en Q crece, disminuya la intensidad de colectorpara evitar así que el producto sea elevado, limitando de estaforma la disipación de potencia del transistor. Para ello se colo-ca un elemento pasivo (condensador) en paralelo con el transis-tor en cuestión (figura 333), el cual debe absorber más intensi-dad cuando la tensión empiece a crecer. En el intervalo detiempo O< t < tfi:
© ITP-PARANINFO

lo' I¡;El valor del condensador ha de ser, por tanto: es ~ --
2· Vd
I 1In 10<-'-"'- ~ Rs< O"
Rs·es es'ln 10
+Vd 1 .•..DI
~lo,
1r
e, r toc,
Cd T RLs
~iiC~Q
Iov
a)
, 1V () V R,C,es I ~ d'e
V cs(to)<O, lo Vd
Aunque las pérdidas en el transitorio TURN-O son meno-res que en el tratado en el apartado anterior, este tipo de circui-tos (figura 3.54) se emplean para reducirlas cuando el transistortrabaja a frecuencias elevadas. Su objetivo es hacer que la ten-sión V CE disminuya mientras crece la intensidad de corriente.
b)
Figura 3.54. a) Snubber "TURN·ON"¡ b) Transitorio OFF-)ON.
¡e
densador no se haya descargado suficientemente y al comenzarel siguiente transitorio ON~OFF el condensador no pueda ejer-cer su función. Se suele tomar como criterio que Cs pueda des-cargarse, al menos, hasta el 10% de Vd'
3.7.6.2. Snubber "TURN-ON"
• t
·1
.t
·1
lo
a)
Rs
o -r-c:::JiC.+1 L ~ 1
---t::: Q Ds ~ CsJ + ies
DI
1
T
b)
1=0iC
EGiCS=~O-iC: '-
lo
- -,VCE=VCs ''¿I, ,
i~~
___:_tfi_Jo:=¡ói
Cd
OV
+Vd
o lo 01lo = ies + ie ; les = ---
Ili
lo 'IrCuando ic=O (t=t~l)' se cumple que V ~ V ~ __ 0_'" d CS 2. es
, I 012Por su parte: Vcs ~ V
CE~ _1_ f ¡csodI ~_o__es o 2 . es . Ifi
Figura 3.53. a) Snubber "TURN·OFF"¡ b) Transitorio ON-)OFF.
Cuando el transistor pasa a conducción, éste se comportacomo un cortocircuito. El condensador Cs se descargará a travésdel propio transistor provocando una sobreintensidad por elmismo y, por tanto, una disipación de energía en el transistor.Para evitar este problema se coloca una resistencia en serie Rs yun diodo Os en paralelo con ellao Su objetivo es que durante eltransitorio ON~OFF el condensador pueda cargarse a travésdel diodo, mientras que el otro transitorio (OFF~ON) se des-cargue a través de la resistencia (Os no conduce).
La resistencia Rs ha de ser tal que el valor inicial de lacorriente de descarga esté por debajo de lrr (coniente inversa derecuperación de Os),
E d . o o _ Vd Vds eCIf. ldesca,.¡;{/ (inicial) - -R < 1,.,.~ RS > --
s 1,.,.
Por otra paJ1e, si Rs es suficientemente elevada, puede ocu-n-ir que durante el tiempo en el que Q está conduciendo, el con-
Se coloca una inductancia (Ls) en serie con el diodo Df parapermitir el mencionado rec0I1e en la tensión V CEo Dicha reduc-ción viene dada por la expresión:
die lot:,. VCE
= Ls ._-~ LsdI Iri
Durante el estado "ON" del transistor Q, la corriente lo cir-cula por Ls' Cuando el transistor entra en corte (OFF), la energíaalmacenada en la inductancia I(Ls·l02)12] se disipará en la resis-tencia RLS a través de DLS con una constante de tiempo igual aLSIRLS'
Para determinar el valor de RLS se ha de tener en cuenta, poruna parte, que ésta debe ser lo suficientemente alta como paraque durante toff la intensidad iLS decrezca al menos hasta el 10%de lo'
Ls'ln laRLS>----
Ioff
© ITP-PARANlNFO

1=0
¡Lo
vCE
AovDov,
1=0
"Con Cov"
Carga {LoCov} Descarga{RovCov)iLo)\!/tO,lVd
vCE
b)
¡lo
a)
Figura 3.56. a) Circuito equivalente; b) Formas de ondacon y sin condensador.
Vd;
En cuanto a la resistencia Rov ha de tener un valor elevado ytendrá por misión descargar el condensador COy hasta que sutensión sea igual a Vd'
K· Vd' tfj·/ o_K' V", tfj·! 0= 100· K'lo'lf,COy --.------ --~-- ----~~
fj. V~E"'<iX 0,12. V} Vd
Lo
En ocasiones la referencia de tensión del circuito de controlno debe coincidir con la del circuito de control de base del pro-pio transistor de potencia. El nivel de referencia del circuitológico de control es la tierra de seguridad, mientras que el nivelde referencia del circuito de control de base es el emisor del tran-sistor de potencia (NPN) a controlar. Además, a veces, es nece-sario controlar a diferentes transistores simultáneamente contensiones distintas que pueden ser de cientos de voltios; de ahíla necesidad del aislamiento galvánico.
Por otra parte, mediante este aislamiento, se evita que cual-quier ruido que se produzca en el circuito de potencia puedapasar al circuito lógico de control, pudiendo alterar el modo defuncionamiento.
3.7.6.4. Aislamientos galvánicos
loDI .•••
¡lo
Figura 3.55. Snubber contra sobretensiones.
-Cd _
OV
+Vd
Por otra parte, RLS es perjudicial para el transitorioON~OFF ya que origina un incremento de tensión en bomasdel transistor ¡).VCE(ojJ) = /0' RLS· Generalmente se especifica unlímite máximo de esta sobretensión y a partir de ahí se determi-na el límite máximo de RLS' Es decir:
R < fj. VCE(oD)máxL5 !
o
Conviene recordar que estos criterios de protección apenasinterfieren entre sí, de modo que se pueden usar simultánea-mente en el mismo circuito.
Lo
La sobretensión observada en la figura 3.56 (b) será de laforma:
En este circuito de protección (figura 3.55), mientras el tran-sistor Q está conduciendo, el voltaje en bornas del condensadorCOy será aproximadamente igual a Vd' mientras que la cOITien-te a través de la inductancia La será igual a lo' En el momentoen que el transistor pase a OFF (t=O) éste se comportará comoun circuito abierto y la energía almacenada en la bobina dismi-nuirá a la vez que se carga el condensador COy ya queVCE>Vcov (Dov "ON") hasta hacerse nula.
3.7.6.3. Snubber contra sobretensiones
Por conservaclOn de energía y teniendo en cuenta que¡). VCOy = ¡).VCE' se obtiene:
L ./K . V = -!!.......Q.
dl/i
Considerando una sobretensión aceptable, por ejemplo de¡).V CEmax=O,l· Vd' se obtiene:
Al igual que sucedía con los transistores MOSFET e IGBT,las técnicas de aislamiento galvánico son, principalmente, tres:
• Mediante optoacoplador.• Mediante fibra óptica.• Mediante transformador.
© !TP-PARANINFO

Ejem~los Resueltos[!] En el MOSFET del circuito de la figura 3.57 (a), dondey d = 100 Y, se sabe que la capacidad entre puerta y drenadortoma valores entre 100pF Y InF (figura 3.57.b) dependiendode la tensión de drenador; que en la zona lineal (ON) la tensiónde puerta debe ser de 5Y para una ID=lOA, Y que durante elprimer tramo de caída de la tensión de drenador en la transi-ción OFF~ON se desea una velocidad de variación de la ten-sión de 10.000 YII-ls.Se pide:
a) Calcular el valor de la resistencia de puerta RG y repre-sentar gráficamente vGS'VDSe iD'
b) ¿Cuánto durará el primer tramo de caída de YDS(tlvI)?c) ¿Cuánto valdrá dV/dt en el segundo tramo de caída de YDS
(tlv2)?¿Cuánto durará, sabiendo que YDS(ON)=IY'Id) ¿Qué valor de pico tiene la intensidad de puerta?
Dl * ~lOA1 I J
1Vd = 100 V RG ~ ~ Ql
~:'G+lOVOV j J I VGG
a)
Se sabe que:
Como durante este período la tensión entre puerta y fuente esconstante, se cumple que:
Sustituyendo y teniendo en cuenta que durante el intervalo detiempo tlvl' la capacidad entre puerta y drenador es CgdI=0, InF,se obtiene:
Vee-VesC10) IOV-5VR = =--------=50
e C .¡dVosl 0,]·]03I-lF·]0.000V/llsgdl dI
Se desprende de aquí la importancia de limitar la pendientede VDSmediante el ajuste del valor óhmico de la resistencia RG.
b) ¿Cuánto durará el primer tramo de caída de Vos (trv1)?
Tal y como se observa en la figura 3.58, el cambio de tlvl atlv2se produce cuando YDS=YGs(l0)=5Y. La pendiente de la ten-sión en el intervalo tlvl será:
I
dVnsl Vd-Ves(lo) . Vd-VCS(lo)m I = ------ = ------------- = tfd - - 9,5 ns
d t tr, I I d~ ;s 1
Cgd •
• I
VDSltI
VGS(lol~5V
1.000 V/llsVec- Ves(lo)
Re,Cgd2
La pendiente de la tensión en el intervalo trv2será:
1112 01 d Vos l. Ves (lo) - Vos(ON) Ves(lo) - Vos(ON)
d, 'N - '¡,,- Id::'1 04n/
c) ¿Cuánto valdrá dV/dt en el segundo tramo de caída deVns (tfv2)? ¿Cuánto durará, sabiendo que VOS(ON)=lV?
Durante el intervalo tlv2' la capacidad que influye en la con-ducción es ahora Cgd2=lnF. Sustituyendo en la ecuación del cir-cuito de puerta:
dVns 1
dt 11,2
d) ¿Qué valor de pico tiene la intensidad de puerta?
Al caer la tensión de drenador, se deriva corriente de puerta adrenador. Al mantenerse constante VGs(lo) se limita el creci-miento de la coniente de puerta, siendo:
Ves(lJ = Vee(ON) - Re·icgd= Vee(ON) - Re ·ie(máx)
. , Vee(ON)-Vcs(lO)1c (max) = --------------------- = 1A
Re
VGGIONI ~, ovVGS •
SOLUCIÓN:
VGSlthl
Cgd2=1nF r--------
b)Figura 3.57.
VGS=VDS(lo)~ VDS
Cgdl =0,1 nF
a) Calcular el valor de la resistencia de puerta RG y repre-sentar gráficamente vGS' vos e iO"
La representación de las diferentes tensiones es la que se indi-ca en la figura 3.58.
+Vd=100V
VDS~VGSllol
OV
td(on)
In
tfvl
Conduce con Cgd2 VDS(ON}
------------------~-------rtv2
Figura 3.58.
lo=10A
• t
1[!;jJ El regulador reductor-elevador de la figura 3.32 tiene apli-cado un voltaje de entrada Yd=15Y.El ciclo de trabajo 0=0,4 yla frecuencia de conmutación es de 20 KHz. La inductanciaL= 150 I-lHY la capacidad C=220 I-lELa corriente promedio decarga es 10=I,2 A. Determinar:
© ITp·PARANlNFO

a) El voltaje promedio de salida Vo'b) La componente ondulatoria del voltaje de salida pico a
pico ~VC"c) La corriente ondulatoria pico a pico del inductor ~I.d) La corriente de pico del transistor Ip'
SOLUCIÓN:
a) El voltaje promedio de salida Vo-
V·DV = - _,_1 - = - IOV
o 1- D
b) La componente ondulatoria del voltaje de salida pico apico ~V C"
c) La corriente ondulatoria pico a pico del inductor M.
VI ·DtJ./=--=2A
.f. ·L
d) La corriente de pico del transistor Ip'
10·D1 =--=08A
d 1- D '
Puesto que Id es el promedio de duración DT s' la corrientepico a pico del transistor será:
1 =~+~=3A" D 2
El voltaje de entrada de un convertidor Cúck mostrado enla figura 3.35 es Vd=12 Y. Su ciclo de trabajo vale D=0,25 y lafrecuencia de conmutación de 20 KHz. La inductancia del filtroes Lz=150 J.lHYCz=220 J.lF.El condensador de transferencia deenergía CI=150 ¡..tFy la inductancia LI=200 J.lH.La corrientepromedio de carga es 10= l A. Detenninar:
a) Voltaje promedio de salida, Vo'b) Corriente promedio de entrada, Id'c) Corriente de la componente ondulatoria pico a pico del
inductor LI, MI'
d) Voltaje de la componente ondulatoria pico a pico del con-densador CI, ~V CI'
e) Corriente de la componente ondulatoria pico a pico de Lz,~Iz'
f) Voltaje de la componente ondulatoria pico a pico del con-densador Cz, ~ VCZ.
g) La corriente de pico del transistor Ip.
c) Corriente de la componente ondulatoria pico a pico delinductor L\, MI'
d) Voltaje de la componente ondulatoria pico a pico delcondensador Cl' L\VCI'
Id·(1- D)tJ. Vel = ---- = 82,5 mV
I,·el
e) Corriente de la componente ondulatoria pico a pico deLz,Mz'
o Voltaje de la componente ondulatoria pico a pico delcondensador Cz, L\Vcz'
g) La corriente de pico del transistor Ip•
El voltaje promedio a través del diodo se puede determinar dela forma:
1VOl = - D· VCI = - Vo·D· D= VA
En el supuesto de que no existan pérdidas en el circuito1LZ . VDI = Vo . lo y el valor promediado de la corriente en labobina Lz es:
Por tanto, la corriente de pico del transistor Q es:
MI Mz11' = Id + -2-+ ILZ +-2- = 2,205 A
En la figura 3.59 se muestra un regulador reductor con unacarga R-L controlada mediante un transistor de potencia QI. Setrata de determinar:
a) La corriente de la componente ondulatoria pico a pico (M)en la carga.
b) La corriente promedio de la carga, (lo)'c) La corriente eficaz en la carga (Iorms)'d) La corriente promedio de la fuente (Id)'
SOLUCIÓN:
a) Voltaje promedio de salida, Vo-
D·VVo= - __ d = -4V
1 -Db) Corriente promedio de entrada, Id'
D·11 = __ o = 033Ad 1 - D '
© ITP-PARANINFO
Vd
01
~
.•. 01
Figura 3.59.

d) La corriente promedio de la fuente (Id) será:
'd = D·'o = 4,995 A
El valor eficaz será, por tanto:
b) La corriente promedio de la carga, (lo) será:
'1 + '2'o =-- = 9,99 A2
R·D·T (__ s Vl. +---l!..
RR·( \- D)·Ts
L
, -Onm -
Particularizando ambas exponenciales para el instante finalde cada uno de los modos se obtiene:
Este modo de funcionamiento será válido en el intervaloO~ l ~ t2 = (1 - D) . Ts y al final del mismo, la corriente valdrá:i¡ (t=t2) = '3 = 'l·
c) La corriente eficaz en la carga (IOrms)'
Suponiendo que la corriente en la carga aumente de formalineal desde 11 hasta 12, su valor instantáneo se puede expresar,durante el intervalo de tiempo tI' de la forma:
. (/2-'1)-(11='1+----
D·T5
~ 1---+-
11 i2
Vd-=- ~ ' +"' va lDR DRModo1 Modo2
Figura 3.60.
Va •Vd
]0.T5 (1-01.T5.. - ~
1 • ¡1(t)
12
11¡21t) 13
1
11~
12 15....• --Figura 3.61.
DATOS: R=5 Q; L=IO mH; fs=2 KHz; 0=0,5; Vd=IOO V;ViOI)=O.
SOLUCIÓN:
El funcionamiento de este circuito se puede dividir en dosmodos (figura 3.60). Durante el modo 1, la corriente i I fluyede la alimentación a la carga (Q¡ÜN). Por el contrario, duran-te el modo 2, dado que la corriente que circula por la bobinano puede variar instantáneamente, ésta fluye ahora a travésdel diodo DI (QI OFF). Las formas de onda están representa-das en la figura 3.61.
a) La corriente de la componente ondulatoria pico a pico(al) en la carga.
La corriente de carga para el modo 1 se puede determinar apartir de:
di¡V =R·i +L·-
d 1 dt
Suponiendo una corriente inicial il(O)=11'su solución será:
Para el circuito de la figura 3.62 se desea que durante latransición ON---70FF del transistor Q aparezca una intensidadde base negativa IB(Ofl)de 0,5A. Calcular los valores límite deR¡, R2 Y R4·
DATOS: Transistores con ~2l O,VBE(ON)=ü,7V; VCE(sal)=Ü,4V;VBE(Slorage)=0,5V; 10=lOA; R3= 100 Q; VBB=10 V.
R·I-L Vd (
+-. JR +Vd
Este modo de funcionamiento será válido en el intervaloO ~ t ~ ti = D . Ts y al final del mismo, la corriente valdrá:i¡ (t=ll) = '2.
La corriente por la carga para el modo 2 se puede determinarpartiendo de:
di2O =R·i2 +L·-dt
Volviendo a definir el origen de tiempo (t=O) al principio delmodo 2, para una corriente inicial i2(0)=12 se obtiene:
R·IL
Vcontrol o
Vref o
,
R3 0,13
11 lB
R2 O + 12
-Figura 3.62.
lo
Q
© ITP-PARANlNFO

SOLUCIÓN:
Cuando el transistor "QB" se encuentra en estado OFF, tam-bién lo está "Q" y la intensidad de corriente 11=0. El valor de laresistencia Rz será:
VRz ~ BE(uOr<lXe) ~ IQ
1B(OFF)
Por el contrario, cuando QB está en saturación, conducirá Q.Se cumple entonces que:
1 1P ~_c_; IB(ON)~_c-~ 1 AlB (ON) Pmín
La intensidad de corriente I1 será:
© ITP-PARANlNFO
V1 < 1 + fJE(ON) ~ 1 7A1- B(ON) ,Rz
Del circuito se obtiene:
El valor de R4 se obtiene de la forma:

.:. l. Clasificar los dispositivos totalmente controlados .:. 6. Técnicas de excitación de los MOSFET e IGBT'S.(GTO, BJT, MOSFET e IGBT' S) en función de: .:. 7. Cálculo de la tensión media de salida Vo en los regu-potencia máxima controlable, frecuencia máxima detrabajo y sencillez del circuito de control. ladores buck, boost, buck-boost y cúck.
.:. 2. Diferencias estructurales entre un MOSFET y un.:. 8. Formas de onda en un convertidor trifásico con la
IGBT. Ventajas e inconvenientes de dichas diferen- carga conectada en estrella o en triángulo.
Clas. .:. 9. Área de operación segura de un transistor bipolar.:. 3. Regiones de funcionamiento de un MOSFET. Con- BJT. Indicar sus límites y la justificación de los mis-
diciones que se deben cumplir para que el transistor mos.
esté trabajando en cada una de ellas. .:. 10. Tipos de protección (SNUBBER) a utilizar para los.:. 4. Área de operación segura de un MOSFET. Límites transistores BJT. ¿Cuál es su objetivo y cuándo es
de funcionamiento . necesario su uso?
.:. 5. Explicar el fenómeno "Iatchup" en un IGBT. For-mas de evitarlo.
© ITP-PARANlNFO

~ Conocer las características fundamentales del motor de corriente continua así como elprincipio de funcionamiento de los mismos.
~ Describir con precisión y claridad el funcionamiento de los diferentes tipos de circuitosde regulación y control y el tratamiento de las señales eléctricas que procesan.
Diferenciar las ventajas e inconvenientes del control de velocidad en lazo cerrado y enlazo abierto.
Explicar el diagrama de bloques de un sistema electrónico de variación de velocidad deun motor de CC, indicando los elementos funcionales que lo constituyen, la función quedesempeña cada uno de ellos y las características espec(ficas del mismo.
~ Enumerar los parámetros fundamentales que se deben tener en cuenta en el estudio yselección de un sistema electrónico de variación para motores de CC, indicando la rela-ción que existe entre cada una de las variables que se controlan y las prestaciones (pre-cisión, velocidad) del sistema.
Identificar los circuitos básicos de la aplicación con la función que realizan.
~ Conocer con precisión y claridad, el funcionamiento del regulador de velocidad de unmotor de CC, así como sus características, tipo y formas de onda de las señales y el tra-tamiento de las mismas a lo largo del circuito.
~ Enumerar y describir el tipo de sensores que se utilizan en la regulación de máqui-nas de Cc.
~ En varios casos prácticos de análisis funcional de sistemas electrónicos de variación develocidad de motores eléctricos de CC:
• Enumerar las distintas secciones que componen la estructura del sistema de regula-ción (entradas, salidas, mando, regulación, fuerza, protección), indicando la función,relación y características de cada una de ellas.
• Describir las características de funcionamiento del sistema, diferenciando los distin-tos modos de funciQnamiento y sus características específicas.
• Calcular las magnitudes y parámetros básicos del sistema, contrastándolos con losvalores reales medidos en dicho sistema, explicando y justificando las variaciones odesviaciones que se encuentren.
• Efectuar la sintonía de los parámetros de regulación del equipo, realizando las prue-bas y medidas necesarias en los puntos notables del sistema, utilizando los instrumen-tos adecuados.

4.1. IntroducciónLos motores de corriente continua (c.c.), además de ser más
caros que los motores asÍncronos de corriente alterna (c.a.), pre-sentan el inconveniente de que sólo pueden ser alimentados contensión continua, por lo cual habrá que convertir previamente lacorriente alterna de la red en corriente continua. En contraparti-da, su simplicidad, su elevado par de arranque y su facilidadpara controlar la velocidad entre márgenes muy amplios lescoloca en una posición competitiva para su uso en una granvariedad de aplicaciones industriales. Los métodos de control develocidad, por lo general son más simples y menos costosos quelos utilizados en c.a.
Tanto los motores de c.c. excitados en serie como los de exci-tación independiente se utilizan normalmente con reguladoresde velocidad variable, aunque tradicionalmente los motores enserie se han utilizado para aplicaciones de tracción. Debido a loselementos de potencia a utilizar (TlRISTOR, MOSFET, IGBT,etc.), los motores de c.c. no son adecuados para aplicaciones demuy alta velocidad y requieren más mantenimiento que losmotores de c.a., aunque la tendencia futura mira hacia los regu-ladores de c.a., a los de reluctancia magnética y a los de imánpermanente (sin escobillas), los reguladores de c.c. todavía seutilizan en infinidad de aplicaciones.
Los rectificado res controlados proporcionan un voltaje desalida de c.c. variable a partir de un voltaje fijo de c.a., en tantoque los convertidores pueden entregar un voltaje de c.c. varia-ble a partir de un voltaje fijo de c.c. Debido a su capacidad parasuministrar voltaje variable, tanto unos como otros causaron unagran revolución en los sofisticados equipos de control industrialy en los reguladores de velocidad variable, con niveles de poten-cia que van hasta miles de voltio-amperios.
4.2. Principio de funcionamientodel motor de C.C.
Como todos los motores eléctricos, su funcionamiento sebasa en las fuerzas que aparecen en los conductores sometidos ala acción de un campo magnético, cuando por éstos circula unacorriente eléctrica.
Según la ley de Laplace "cuando un conductor está inmersoen el seno de un campo magnético y por él circula una corrien-te eléctrica, aparecen sobre él unas fuerzas de carácter electro-magnético que tienden a desplazar/o".
F=[.LxBdonde:
F =Fuerza [N]
B = In ducción [T]L=Longitud [m]
F= In tensid ad [A]
En la figura 4. l se ha representado el circuito elemental de unmotor de corriente continua. Los polos situados siempre en elestator, s~ los encargados de producir el campo magnéticoinductor (B ). La espi!f que se ha situado en el rotor, es recorri-da por una corriente I que se suministra a través de un anillo decobre cortado por la mitad (colector de delgas). Las dos mitadesse aíslan eléctricamente y se colocan sobre ellas unos contactos
deslizantes de carbón (escobillas) de tal forma que la corrienteaplicada a través de la fuente (V) puede llegar a los conductoresdel rotor.
_ I N IEstator -L-------J
úl .a \_
Rotar
--7; I
Figura 4.1. Principios de funcionamiento del motor de e.e.
Como las corrientes que circulan por ambos lados de la espi-ra son contrarias, al aplicar la "regla de la mano izquierda" sepuede comprobar que aparecen fuerzas también contrarias encada lado activo de la espira, lo que determjna un par de giro.Para que el sentido de giro sea siempre el mismo, el par de fuer-zas siempre debe actuar en el mismo sentido. Con el colector dedelgas se resuelve este problema, haciendo que la corrientesiempre gire en el mismo sentido respecto al campo magnético.Si se pretende cambiar el sentido de giro, bastará con invertir elsentido de giro de la corriente por el rotor, manteniendo elcampo inductor fijo.
La máquina de c.c. es reversible y por tanto puede actuartanto como motor (M) como generador (G). Tal y como se hapodido comprobar consta de tres partes fundamentales: un cir-cuito que sea capaz de producir un campo magnético (circui-to inductor), otro circuito que al ser recorrido por unacorriente eléctrica desarrolle pares de fuerzas que pongan enmovimiento el rotor (circuito inducido) y un colector de del-gas con escobillas.
4.2.1. Fuerza contraelectromotriz.Corriente de inducido.Par motor
Si el motor gira impulsado gracias al par de giro desarrolla-do por los conductores del inducido cuando son recorridos poruna corriente, dichos conductores cortan en su movimiento a laslíneas de campo magnético del inductor, lo que hace que se ori-gine en ellos una fuerza contraelectromotriz (f.c.e.m). El senti-do de dicha fuerza es tal, que según la ley de Lenz tiende a opo-nerse a la causa que lo produjo; es decir a la corriente delinducido y a la tensión aplicada al motor, de ahí que general-mente se conozca con el nombre de fuerza contraelectromotriz.
La expresión que relaciona la fuerza contraelectromotriz (E)de un motor de c.c. es la siguiente:
P 1E= <p'n ·N·_·-
a 60
© ITP-PARANlNFO

Figura 4.2. Formas de conexión de un motor de c.c.
c) Excitación serie.d) Excitación compuesta o Compound.
E
li
oa)
Vb
donde: E =Fuerza contraelectromotriz (V).t/J = Flujo por polo (Wb).n = Velocidad de giro (r.p.m.).N = N° de conductores del inducido.a = Pares de circuitos del inducido.P = N° de pares de polos.
Como quiera que N, P Ya son constantes para un determina-do motor, la ecuación anterior se puede expresar de la forma:
E=K¡'w<l>donde K¡ es una constante.
Cuando el motor trabaja en vacío, el par motor originado porlos conductores del inducido, provoca un aumento de la veloci-dad del rotar debido a la poca resistencia que encuentra en el eje.Dicho aumento produce a su vez, una mayor fC.e.m. que limitala corriente del rotar a valores de corriente de vacío. Sin embar-go cuando el motor trabaja en carga, la velocidad tiende a dis-minuir, con lo cual también lo hará la fC.e.m. y la corriente delinducido (1) aumenta elevándose con ella el par de fuerzas. Portanto, se puede decir que la corriente que el motor absorbedepende de la carga que tiene que mover; es decir:
V-E-2'Vf.= b e
1 RI
donde: l¡ = Corriente d~1inducido (A).Vb = Tensión en bomes del motor (V).E = Fuerza contraelectromotriz (V).2Ve = Caída de tensión en las escobillas (V).R¡ = Resistencia del inducido (Q).
Por otra parte, el par motor que desarrollan los conducto-res del inducido al ser recorridos por una corriente eléctrica(par electromagnético), dependerá según la ley de Laplacedel valor de dicha corriente y del flujo desarrollado por elcampo inductor. La expresión que relaciona el par electro-magnético (M) con estas variables teniendo en cuenta que N,P Y a son constantes, es:
1M= _N_·_P_. <1>. f¡= K2' <1>. f¡ ; donde K2 = cte.
2'n'a. E V¡, - 2 Ve - R ¡' f ¡
n = -- = ------
K¡'<I> K¡'<I>
Por tanto, resumiendo, se puede decir que el par motor es pro-porcional a la corriente del inducido y al flujo del campo magné-tico inductor y que la velocidad de giro depende además de lasdos variables anteriores de la tensión en bomes del motor.
4.2.2. Conexión de los motoresde C.C.
Existe una gran variedad de motores de c.c. dependiendo decómo se conectan y se excitan sus devanados. Una de las formamás comunes de conexionado es la de excitación independien-te que será la que principalmente se utilice a lo largo del desa-rrollo de este capítulo.
La figura 4.2 muestra los distintos tipos de motores de c.c. enfunción de la conexión de sus devanados, las cuales son:
a) Excitación independiente.b) Excitación en derivación o Shunt.
4.2.3. Modos de operacióndel motor de C.C.
En la figura 4.3 se muestran las polaridades de voltaje dealimentación Vb' de la fuerza contraelectromotriz E, de lacorriente de excitación lex y de la corriente de inducido I¡ paraun motor de c.c. con excitación independiente.
• PRIMER CUADRANTE: Como motor hacia delante,Vb' E, e I¡son todos positivos. También son positivos, eneste caso, el par motor y la velocidad. La fC.e.m. (E) esmenor que el voltaje de alimentación Vb' El motor desa-rrolla un par para cumplir la demanda de la carga.
• SEGUNDO CUADRANTE: Durante el frenado haciadelante o directo, el motor opera en dirección directa yla f.c.e.m. inducida (E) seguirá siendo positiva. Para queel par motor sea negativo y se invierta la dirección delflujo de energía, la corriente por el inducido I¡ debe sernegativa. El voltaje de alimentación Vb debe conservar-se inferior a E.
• TERCER CUADRANTE: Como motor hacia atrás,Vb' E, e I¡ son todos negativos. En este cuadrante tam-bién el par motor y la velocidad son negativos. Para con-servar negativo el par y el flujo de energía de la fuenteal motor, la fuerza contraelectromotriz E debe satisfacerla condición: IVb I> IE l.
• CUARTO CUADRANTE: Durante el frenado haciaatrás o indirecto, el motor gira en dirección inversa, Vb
Y E permanecen negativos. Para que el par motor seapositivo y la energía fluya del motor a la fuente, lacorriente del inducido debe ser positiva. La fC.e.m.inducida debe satisfacer la condición: I Vb I< IE l.
© ITP-PARANINFO

2
Por otra parte, la potencia eléctrica (Pe) y la potencia mecá-nica (Pm) desarrollado en el eje serán:
M (Par motor)
---------------.. li (Corr. inducido)
Figura 4.5. Característica par-corriente de inducido(excitación en derivación).
Pe=E'I¡=K]'n'<jJ'I¡
P",=M·w=K2·<jJ·I¡·w, siendo w=[rad]seg
4.2.5. Variación de la velocidad a parconstante y a potencia constante
A esta forma de trabajo se le conoce como "a par constan-te" (potencia variable) y con ella se puede variar la velocidaddesde cero hasta la velocidad nominal del motor .
El par cedido por el motor será siempre igual al que exija lacarga exterior. Por tanto si se trabaja con una carga fija y un flujode excitación constante, la corriente absorbida por el motor (I)también será constante para cualquier valor de la tensión de ali-mentación (Vb)' No ocurre lo mismo con la potencia absorbi-da por el motor (Pab)' la cual varía según la expresión:
La explicación de este apartado está basada en un motor deexcitación independiente, para el cual como se vio anteriormen-te el valor del par motor viene dado por la siguiente expresión:
Figura 4.3. Modos de operación en un motor de c.c. con excitaciónindependiente.
Vb r $: Av"' Vbr $':8v"'Motor e Generador (Frenado) eIVbl > E IVbl < IEI
4.2.4. Características de velocidady de par motor
n (Velocidad)
Por el contrario si la reacción de inducido es apreciable, elvalor del flujo disminuirá al aumentar la corriente del inducidohaciendo que la curva sea más horizontal o incluso que llegue atener una inclinación opuesta (curvas 2 y 3). Los valores de "no"e "liO" corresponden a la velocidad y a la corriente de inducidodel motor trabajando en vaCÍo.
En la figura 4.4 se muestra la característica velocidad (n) -corriente de inducido (1) para un motor de c.c. con excitaciónen derivación. En este caso, si se supone despreciable la reac-ción de inducido (curva 1), el valor del flujo (<1» sólo depende dela corriente de excitación para un determinado valor de la ten-sión de entrada (Vb)' lo cual hace que la curva característica seaprácticamente recta.
---------- •. li (Corr. inducido)
•. n
•. rI Vb=cte.
-~------- ------------------------~--
III
IIII
M=cte. ~ Pab=cte. (<\> variable)
------,
lex
o
o
Pab
Figura 4.6. Característica de los motores con excitación independiente.
M, Pab
• n (Velocidad)
00 rILL_
lio
Figura 4.4. Característica velocidad-corriente de inducido(excitación en derivación).
Finalmente, se muestra también la curva característica par-corriente de inducido de un motor con excitación en derivación(figura 4.5). En ella se puede comprobar como, considerandodespreciable la reacción de inducido y <1> el flujo constante(Vb=cte.), el par es proporcional a la corriente de inducido(curva 1). Por el contrario, si la reacción de inducido tiene unvalor apreciable, el flujo disminuirá al aumentar la corriente deinducido (curva 2).
© ITP-PARANINFO

Sin embargo, se puede aumentar la velocidad por encima dela nominal si una vez aplicada la tensión nominal, se disminuyeel flujo de excitación. Ahora bien, si se mantiene el par de lacarga exterior constante, como consecuencia de haber disminui-do el flujo, la intensidad absorbida (1) habrá aumentado y lapotencia absorbida por el motor sobrepasará su valor nominal.
En este tipo de variación, un aumento de la velocidad debe iracompañado de una disminución del par aplicado, con el fin deno sobrepasar la potencia nominal del motor. A este tipo deregulación se le conoce como "a potencia constante" (parvariable).
Estos dos tipos de variación de velocidad se muestran gráfi-camente en la figura 4.6.
4.3..Control analógico. de sistemasnn .. nn n ,
Un control analógico compara el valor efectivo de salida deun sistema (e) con el valor deseado (Vref), determina la desvia-ción y produce al mismo tiempo una señal de control que redu-ce la desviación a cero o a un valor pequeño. La forma en que elcontrol automático produce la señal de control, se llama acciónde control. Posteriormente se presentan las acciones de controlo reguladores comúnmente utilizados en los sistemas de regu-lación industriales de lazo cerrado mediante técnicas analógicas(control lineal de baja frecuencia).
De acuerdo con su acción de control, los sistemas de regula-ción industriales pueden ser de diferentes tipos:
• Control de dos posiciones (Conectado/Desconectado).• Control proporcional (P).• Control integral (1).• Control proporcional-integral (PI).• Control proporcional y derivada (PO).• Control proporcional, integrador y derivador (PID).
4.3.1. Control de dos posiciones(Conectado/Desconectado)
En este control, el elemento accionador tiene solamente dosposiciones fijas, que en muchos casos son simplemente conec-tado y desconectado (no lineal). Se trata, por tanto, de un tipo decontrol muy simple y económico, por lo que es ampliamente uti-lizado.
El regulador puede consistir en un simple comparador, o enun comparador con histéresis. Este último tiene la ventaja de queevita el entrar en un ciclo de conexiones y desconexiones rápi-das del accionador, cuando la salida está en torno al valor dese-ado. En el tema 1 se trataron en profundidad los diferentes tiposde comparadores con amplificadores operacionales.
Vis)
Figura 4.7. Sistema de control de un motor de c.c. 4.3.2. Control proporcional (P)Supóngase un sistema como el de la figura 4.7, el cual corres-
ponde al control de un motor de c.c. alimentado por un conver-tidor en lazo cerrado en el que R(s) es el bloque controlador develocidad, A(s) el bloque accionador (convertidor DC-DC eneste caso), 8(s) el acondicionador de velocidad y C(s) el motory su carga.
Observando el diagrama de bloques se cumple que:
E =X(s) - ev =X(s) - 8(s)' Y(S)
Llamando: G(s) = R(s) . A(s) . C(s), se obtiene:
Y(s) = E' G(s) = (X(s) - 8(s)' Y(s)]· G(s) = X(s)· G(s) - 8(s) . Y(s)· G(s)
-
Rl R2
e o~c:::J. c:::J
oU
Rl-evo c:::J
Dentro de los controles lineales es el más sencillo (figura4.8). Consiste en un amplificador de ganancia ~, de maneraque la función de transferencia del regulador sera de la formaR(s)=Kp (cte. proporcional). Tiene el inconveniente de quesiempre tiene que existir un error (E) para que el regulador actúe.
G(s)
1 + G(s) . 8(s)F(s) = Y(s) =
X(s)
Operando:
Figura 4.8. Control proporcional (P).
donde Kp es una constante de proporcionalidad.
En la figura 4.9 se representa la respuesta del circuito a unaseñal de error (E) en forma de escalón.
Esta ecuación representa la función de transferencia del sis-tema expresada en el dominio de Laplace.
En nuestro caso el regulador R(s) recibe como entrada laseñal de error (E) entre la tensión de consigna X(s) y la salidareal (eJ mediante un comparador-restador y genera la "acciónde control" (U) como entrada al "actuador", que en este casoserá el circuito generador de impulsos de disparo (Cl. SP 60 1)Yel puente inversor, para así atacar al sistema a controlar (motorde c.c.). La velocidad real de giro del motor se convierte,mediante una dínamo taco~étrica y un "acondicionador", enuna señal (e) proporcional a la velocidad de giro del motor.
Del propio circuito se deduce:
R2 R2U = - - . (e - e ) = --' E = R(s)' ER
1v R¡
R,R(s) = - -=,= K
R PI
© ITP-PARANINFO

•. t
----- •. t
C-s e(s) e)s)---·U(s)=----I+R·e·s R, R2
to
u (s)
u •
·Vcc
i (s) = -
R+-1
-e·s
R1 R e
e O c:::J ..o I I i •. ]i 1
R2 +Vcc
·ev 0- c:::J--- -0-..i2 U
Por tanto:
j. . . e -ev[=[+[=-+--
I 2 R RI 2
U=-i'R--ZJi'd!
Analizando el circuito se obtiene:
Figura 4.12. Control proporcional· integral (PI).
Figura 4.11. Respuesta del control integral a una señal escalón.
E •
Tomando transformadas de Laplace:
j. e(s) e,.(s)I(S) =-----
R, R2
U(s) = -R· i(s) - -1-. i(s)e·s
4.3.4. Control proporcional-integral(PI)
Se trata de una combinación de los dos anteriores (figura4.12) y permite ajustar, tanto el régimen permanente (acciónintegral), como el régimen transitorio (acción proporcional).
---- __ t
toIr----..t
e
I IO o ~o+vcc !
-oU
, -Vcc-Figura 4.10. Control integral (1).
"-------'lu •
E o
Kp.E
i~e- dU. i=-.!-d!' R
En el dominio de Laplace:
i(s) =C- s· U(s) ; U(s) =-1_. i(s) =__ 1:_C-s R'C-s
Por tanto:
Figura 4.9. Respuesta del control proporcional a un escalón.
Se han de cumplir las relaciones:
La ganancia del amplificador será de la forma:
4.3.3. Control integral (1)En este tipo de control (figura 4.10) la señal de acción (U) se
calcula como la integral de la señal de error (E), de tal forma quecuando el error es nulo, la acción se mantiene constante, mien-tras que cuando el error es distinto de cero la señal de acciónaumentará o disminuirá lineal mente según sea el signo del error.
U(s) 1 IR(s)=--= ---= ---
1: R·e·s 1" ,'SIII
donde 'fai=R'C es la constante de acción integral.
En la figura 4.11 se puede observar la respuesta del circuito auna señal escalón.
Haciendo R¡=R2, se obtiene:
C-s e(s) e (s) Ii(s) =- ----. U(s) =-- - -'-' - =-' [e(s) - e (s)]
I+R·e·s R, R, R, v
La función de transferencia del circuito proporcional-inte-gral, en el dominio de Laplace será, por tanto:
© ITp·PARANINFO

o U
Ri~
e r o +v"
-11 · C>-I 6 -Vcc-Figura 4.16. Control proporcional y derivada (PD).
R1
E o -c::::J
4.3.5. Control proporcionaly derivada (PD)
Puesto que este tipo de control (figura 4.16) sólo actúa en lostransitorios, no se puede tener únicamente una acción derivadaya que, en este caso, el sistema no es capaz de definir el valordel régimen permanente.
e
La acción derivada es proporcional a la derivada del erroractuante, por lo que, en cierto modo, se anticipa a los errores. Seutiliza cuando se desea mejorar el régimen transitorio (hacermás rápido el sistema).
La acción derivada tiene la desventaja de ser muy sensibleante las señales de ruido, pudiendo provocar la saturación delaccionador.
R1
Figura 4.15. Circuito de ajuste independiente (11).
Mientras la tensión de salida del amplificador operacional seainferior a +V 10 superior a - V2, los diodos DI y O2 estarán pola-rizados inversamente y, por tanto, no circulará intensidad decorriente a través de la resistencia R3. En estas condiciones latensión de salida será la misma que la proporcionada por elamplificador operacional.
Cuando la tensión de salida del amplificador operacionalsupere a +V 1 o sea inferior a - V2' conducirá uno de los dos dio-dos, provocando así una caída de tensión en la resistencia R3 ylimitando, por tanto, la tensión de salida (U) del regulador .
-ev
u
..
e
1 + '.·s1
-Kp(e-e)
,ai
R
: toIII
,i
1u
R2
R1
Figura 4.14. Circuito de ajuste independiente (l).
R(s) =. U(s)e(s) - ev(s)
1 (I+R.e.s) =_ R (I+R'C-S) =-K (I+,;'S)R(s)=-- ---- ---- ---R¡ e·s R1 R·e·s P '¡'s
R(s) = - K, ( 1+ _1_)I '.' S1
Figura 4.13. Respuesta del control proporcional-integral a un escalón.
Mediante circuitos similares al de la figura 4.14 es posibleajustar independientemente, tanto la ganancia Kp como el tiem-po de integración 'rai.
Se deduce, por tanto, que el control proporcional-integral esuna combinación de los dos anteriores. En la figura 4.13 se indi-ca gráficamente la evolución de la señal de salida cuando laseñal de error se trata de un escalón
donde 'ra¡=R¡"C es la constante de tiempo de acción integralo tiempo de integración y 'r¡=R'C es la constante de tiempointegral.
Denominando ahora factor de proporcionalidad a Kp=RJR¡ :
Asimismo, en los circuitos de regulación de lazo múltiplemás usuales, es necesario limitar la señal de salida. El circui-to de la figura 4.15 utiliza dos potenciómetros para ajustarindependientemente las ten iones de limitación de salida delregulador.
Analizando el circuito:
f e=-i'Ri-ffi'dl
lU =i·R
© ITP-PARANlNFO

La función de transferencia del circuito proporcional y deri-vada, en el dominio de Laplace será, por tanto:
donde 1:d es la constante de correlación derivada o tiempo dederivación, y vale:
Se puede demostrar que su función de transferencia es de laforma:
Este regulador presenta el inconveniente de que su ajusteresulta difícil ya que puede oscilar por tres causas:
• Ganancia.• Tiempo de integración.• Tiempo de derivación.
Por esta razón se suele emplear en procesos lentos, por ejem-plo en regulación de temperatura.
En la figura 4.19 se observa la respuesta a una señal escalón.
(1 + t, . s) . (1 + ',,' s)R(s)- -------
" Sal
1+ , .' Sal
'.' sI----R(s) = U(s) = _
e (s)
Tomando transformadas de Laplace:
¡ I I+R'C-se(s)=-R¡'i(s)---'i(s)=- I 'i(s)
C-s C-sVes) = + R . ;(s)
donde 1:a¡=R/'C Y 'T:¡=R·C.
Se puede deducir, por tanto, que el derivador no responde alas tensiones constantes o estables, haciéndolo únicamente antetensiones variables y siendo la respuesta tanto más fuerte cuan-to más brusca es la variación de la tensión de entrada. En la figu-ra 4.17 se muestra la respuesta del circuito ante una determina-da señal de entrada.
~ t
u •
de-RC--
dt
Figura 4.17. Respuesta del control proporcional y derivada.
"1U !
•e-e. ,,i + ,d
,ai ¿ .. t,ai~ ..Figura 4.19. Respuesta a un escalón.
Se ha de recordar que:
Figura 4.20. Circuito equivalente de un motor de e.e.
di.V =E+R'i+L'-'
h I I I dI
-o
+EO~~t ~
Ri
+ o--c::::J-
Vb
En la figura 4.20 se representa el circuito equivalente de unmotor de C.C. al cual se le ha conectado en su eje una carga.
4.4. Función de transferenciadel motor para modeloen pequeña señal ---------
= C2?+Vcc I
~---~-OU
.L~-
Rl R Cl R
e o -c::::J--.-C:J--1 ----c:::J,
Figura 4.18. Regulador PID.
4.3.6. Control proporcional, integradory derivador (PID)
Tal y como se ha expuesto anteriormente, el regulador deri-vador como tal no tiene sentido y sólo se utiliza como comple-mento del proporcional-integral (P/).
Por otra parte, el regulador PI puede hacer nulo el error deregulación, pero una vez transcurrido un cierto tiempo. Tambiénse sabe que el regulador proporcional tiene un tiempo de res-puesta nulo, pero el error de regulación no lo es.
Combinando los tres reguladores se obtiene el regulador PIOque posee una respuesta inicial casi instantánea y presenta unerror estático nulo (figura 4.18).
© ITP-PARAN/NFO

K ,
R.+s ·L, ,
Figura 4.22. Diagrama de bloques en lazo cerrado del sistemamotor+carga.
ML(s)
La respuesta en lazo cerrado a un escalón en el voltaje dereferencia (ML=O) tiene como función de transferencia:
--~
R(s)' A(s)' Ke
w(s) = R_¡ ·_B_R _
X(s) K~ +B(s) 'R(s)'A(s)s2., " +s·(, +, )+I+--------
a m 1I ni R.'B,. ,.
Una vez conocido el modelo del motor a utilizar se procedea añadir las trayectorias de realimentación necesarias para con-seguir el control en lazo cerrado, obteniendo así la respuesta desalida deseada (figura 4.22).
M L (s) = O
Por otra parte, la respuesta a un cambio en el par motor de lacarga ML(s) se obtiene al hacer Vb(s)=O:
Estas ecuaciones del motor+carga se pueden representargráficamente mediante el diagrama de bloques de la figura4.21. En él se puede observar que como entradas del sistemase encuentra la tensión en bornes del motor Vb(S) y el par dela carga ML(s).
donde: • Mres es el par resistente.• M es el par motor (electromagnético).• J es el momento de inercia.• Br es el coeficiente de rozamiento.• ID es la velocidad angular.• ML es el par equivalente de trabajo en la carga.
Sustituyendo la segunda y la quinta de las ecuaciones en latercera se obtiene:
M(s) = (B,. +s'})'w(s)+M L(S)
E(s) = K •. w(s)
M(s)=K,'/¡(s)
K,'/¡(s) =},s' w(s)+ B,.· w(s) + M L(S)
w(s) = S' 8(s)
ML(s)o
K . i.= } . d w + B . w + ML" dI ,.
M,.es=B¡w
dwM=}'-+M +MdI ,.es L
E = K e . w (Para <1> = cte.)
M = K,'i¡ (Para <1> =cte.)
Aplicando transformadas de Laplace, donde el operador deLaplace representa el incremento de la correspondiente variablecon respecto al tiempo, se obtiene:
Asimismo, la respuesta debido a un cambio en el par motorde la carga (ML), si VreFO, tiene como función de transferencia:
s', + Ia
Figura 4.21. Diagrama de bloques en lazo abierto del sistemamotor +carga.
Aplicando el principio de superposición; es decir, una entra-da está activa mientras que la otra se mantiene a cero:
K '/(s)-ML(s) K/'/¡(s) ML(s)w(s) = -'-' ---- -----
}·s+B,. }·s+B,. }·s+B,.
w(s) = B_,. _
M L(S) K2+ B(s)' R(s)' A(s)
S2.,., +s·(, +, )+I+_e _a m (1 m R.'B, ,.
donde 'ra=L¡!R¡ es la constante de tiempo del circuito de la arma-dura del motor y 'rm=J/Br es la constante de tiempo mecánica delmotor.
= _K_/_ _V_b(_s_)_-_E_(s_) M L(s)
Operando:
4.5. Regulador de velocidadde C.C.
K,w(s) = ----------. Vb(s)-
(R¡+s'L)'(J's+B) + K/'Ke
R.+s·L.- / / .M L (s)
(R¡+s·L)·(J·s+B,.)+ K,'Ke
La respuesta a una señal escalón en el voltaje de referencia seobtiene haciendo ML=0:
4.5.1. Diagrama de bloquesHoy en día, en la mayor parte de las aplicaciones industria-
les, se trabaja con sistemas de regulación en lazo cerrado. Unsistema de control en lazo cerrado tiene las ventajas de una pre-cisión mejorada, una respuesta dinámica rápida, así como una
© ITP-PARANlNFO
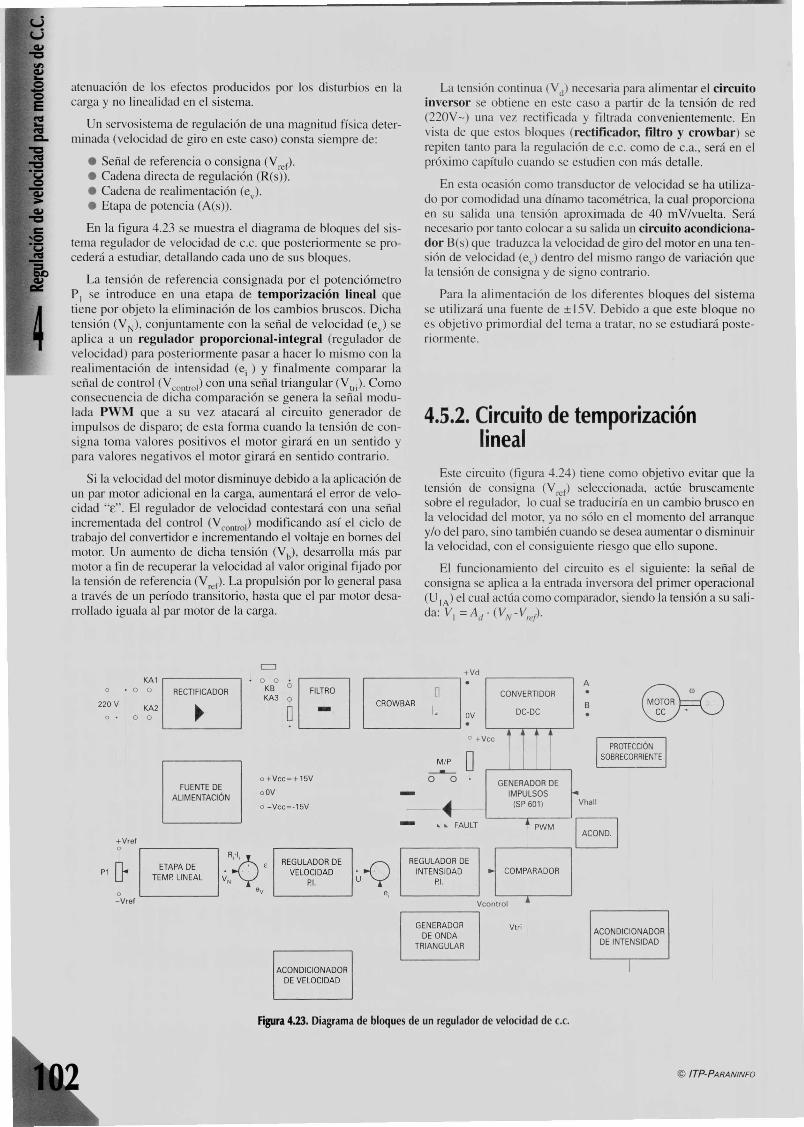
atenuación de los efectos producidos por los disturbios en lacarga y no linealidad en el sistema.
Un servosistema de regulación de una magnitud física deter-minada (velocidad de giro en este caso) consta siempre de:
• Señal de referencia o consigna (V ref)'
• Cadena directa de regulación (R(s».• Cadena de realimentación (eJ.• Etapa de potencia (A(s».
En la figura 4.23 se muestra el diagrama de bloques del sis-tema regulador de velocidad de c.c. que posteriormente se pro-cederá a estudiar, detallando cada uno de sus bloques.
La tensión de referencia consignada por el potenciómetrop¡ se introduce en una etapa de temporización lineal quetiene por objeto la eliminación de los cambios bruscos. Dichatensión (VN)' conjuntamente con la señal de velocidad (eJ seaplica a un regulador proporcional-integral (regulador develocidad) para posteriormente pasar a hacer lo mismo con larealimentación de intensidad (e¡ ) y finalmente comparar laseñal de control (Vcol1trol) con una señal triangular (Vtr). Comoconsecuencia de dicha comparación se genera la señal modu-lada PWM que a su vez atacará al circuito generador deimpulsos de disparo; de esta forma cuando la tensión de con-signa toma valores positivos el motor girará en un sentido ypara valores negativos el motor girará en sentido contrario.
Si la velocidad del motor disminuye debido a la aplicación deun par motor adicional en la carga, aumentará el error de velo-cidad "f.". El regulador de velocidad contestará con una señalincrementada del control (V cOl1trol) modificando así el ciclo detrabajo del conveltidor e incrementando el voltaje en bornes delmotor. Un aumento de dicha tensión (Vb)' desarrolla más parmotor a fin de recuperar la velocidad al valor original fijado porla tensión de referencia (V rcf)' La propulsión por lo general pasaa través de un período transitorio, hasta que el par motor desa-ITollado iguala al par motor de la carga.
La tensión continua (Vd) necesaria para alimentar el circuitoinversor se obtiene en este caso a partir de la tensión de red(220V -) una vez rectificada y filtrada convenientemente. Envista de que estos bloques (rectificador, filtro y crowbar) serepiten tanto para la regulación de c.c. como de c.a., será en elpróximo capítulo cuando se estudien con más detalle.
En esta ocasión como transductor de velocidad se ha utiliza-do por comodidad una dínamo tacométrica, la cual proporcionaen su salida una tensión aproximada de 40 mV/vuelta. Seránecesario por tanto colocar a su salida un circuito acondiciona-dor B(s) que traduzca la velocidad de giro del motor en una ten-sión de velocidad (e) dentro del mismo rango de variación quela tensión de consigna y de signo contrario.
Para la alimentación de los diferentes bloques del sistemase utilizará una fuente de ±ISY. Debido a que este bloque noes objetivo primordial del tema a tratar, no se estudiará poste-riormente.
4.5.2. Circuito de temporizaciónlineal
Este circuito (figura 4.24) tiene como objetivo evitar que latensión de consigna (Vref) seleccionada, actúe bruscamentesobre el regulador, lo cual se traduciría en un cambio brusco enla velocidad del motor, ya no sólo en el momento del arranquey/o del paro, sino también cuando se desea aumentar o disminuirla velocidad, con el consiguiente riesgo que ello supone.
El funcionamiento del circuito es el siguiente: la señal deconsigna se aplica a la entrada inversora del primer operacional(U IA) el cual actúa como comparador, siendo la tensión a su sali-da: VI =A,,' (VN-Vre/
~~
B•
A
Vhall
PWM
COMPARADOR
CONVERTIDOR
DC-DC
cc
GENERADOR DEIMPULSOS ¡..
(SP 601)
J.
Vcontrol
o +V
.lo. FAULT
M/P O----o o
REGULADOR DEINTENSIDAD
PI.
--
e,
REGULADOR DE YVELOCIDAD U·
PI.
o +Vcc=+15V
oOV
o -Vcc=-15V
FUENTE DEALIMENTACiÓN
+Vre!o
P1 [r ETAPA DETEMP LINEAL
o-Vre!
= +VdKAl o o :b •o .o o RECTlFICADOR KB OKA3
220 V KA2~ O -
CROWBARl.o • o o OV
GENERADORDE ONDA
TRIANGULAR
Vtri ACONDICIONADORDE INTENSIDAD
ACONDICIONADORDE VELOCIDAD
I
Figura4.23. Diagrama de bloques de un regulador de velocidad de e.e.
© ITP-PARANlNFO

Cuando la señal de consigna sea nula, la salida VN tambiénlo será. Si a continuación se fija una tensión de consigna positi-va (por ejemplo de 3 V), la salida V I se irá a saturación negati-va (-15 V) Y en ese momento se pondrá a conducir DI' circu-lando una intensidad a través de P2 y de Rs (divisor de tensión)y produciendo una caída de tensión (VRS)que puede variar enfunción del ajuste del potenció metro P2 (aceleración).
El segundo operacional (UIS) actúa como seguidor de ten-sión, con lo cual la señal de entrada del tercer operacional (U2)valdrá:
4.5.3. Generador de onda triangular
C3 lOnF C4 1 ¡LF
1-
pasará a conducir. A través del potenció metro de deceleraciónP3, se ajusta la corriente que circula por Rs' fijando una tensiónVC2que en este caso será positiva. En ese momentoV que hastaahora se mantenía en el valor preseleccionado anteriormente(5V) comenzará a descender, con la pendiente de bajada deter-minada en esta ocasión por P3 y la constante1:ai, hasta igualarsecon el nuevo valor (V =VreF-2V).
Rl1
Cl 10nF
R10 22K 5K6
Figura 4.24. Circuito de temporización lineal.
Tl082R2 lK
-15V
100K 100K R3~ - [:=J
100K
Figura 4.26. Generador de onda cuadrada y triangular.
Para generar una señal de semiperíodos iguales se emplearáun generador de onda cuadrada y triangular construido a partirde amplificadores operacionales, tal y como se muestra en lafigura 4.26.
C1=1nF
I -jl---.R1 I I
~~OV'If"
.L IP2
·6
El tercer operacional está configurado como integrador. Sedenominará "tiempo de acción integral" ('ta;) al tiemponecesario para que VN se haga igual a Ve2. Dicho tiempodepende, básicamente, de los valores de C3, C4 y R7; es decir:1:ai =: R7 (C4+CS) =: 0,44 s. De esta forma la tensión de salidaV evolucionará hasta que V =Vcon=3 V, momento en el cualVA=O·Ad=OV, lo cual implica que VRS=OV y la salida V semantendrá en el valor deseado (3 V).
Si se sigue incrementando el valor de la tensión de referencia(VreF5 V), volverá a producirse la saturación de U lA' repitién-dose todo el proceso descrito anteriormente hasta que de nuevoVN alcance el valor de Vref'una vez transcurrido un tiempo quedepende de PI y de 1:ai(véase figura 4.25).
_1
VC2
• VA
+ 15V r-------r-~
Está compuesto por una báscula de Schmitt (no inversora-simétrica) y por un integrador Miller.
El funcionamiento de la báscula inversora es el siguiente:cuando la tensión de salida (VA) es positiva (+Vec=+ 15V) y latensión de entrada a la misma (Vs) disminuye, conmutará cuan-do Vs=Vss Y , por tanto, VA= -Vee= -15Y. Si, por el contrario,la tensión de salida (VA) es negativa (-Vcc= -15V) y la tensiónaplicada a la entrada de la báscula (Vs) aumenta, cuandoVs=V ss conmutará y su tensión de salida pasará a serVA=Vee= 15Y.En la figura 4.27 está representada su función detransferencia.
• 1
VN5V3V
OVI
-2V .:
-15V
OV
+1SVV1
-2V
Vref5V3V
Figura 4.25. Formas de onda del circuito de temporización lineal.
Si, por el contrario, la tensión de consigna toma valores nega-tivos (VreF-2V), la salida del primer operacional (VI) se satu-rará al valor positivo (+ l5V), por lo que será ahora D2 el que
Figura 4.27. Función de transferen·cia de la báscula no inversora.
VsB Vss
·15V
- Vs
© ITP-PARANINFO

- -
r +15V
R7 O lK
GY L-oPWMR6 10K 01
U'B '--c::J~BC547B• VB
'N4'48"'0'
lc::::J~VA 10K
R5
Vcontrol o c::J'OK
R2~I
Figura 4.29. Circuito comparador (PWM).-
R'VsO ~
lOOK
Se consigue, de este modo, que la frecuencia de la señal desalida (fs) pueda variar entre 4,5 y 50KHz, aproximadamente.Dicha frecuencia coincidirá con la de conmutación del inversor.
4.5.4. Circuito comparador (PWM)Es el representado en la figura 4.29 y tiene por misión gene-
rar una señal cuadrada de frecuencia constante y cuya duraciónde pulso sea proporcional a una tensión de control, es decir,modulada en anchura de pulsos (PWM).
Para eliminar la posible componente continua de la señalobtenida en la etapa anterior (generador de onda triangular) seincluye una etapa sumadora (U1A) con el fin de que la señaltriangular sea totalmente simétrica.
Por otra parte, la señal procedente del regulador de intensidad(Vcontrol) será la empleada para comparar la señal triangular ygenerar así la señal modulada en anchura de pulsos (PWM). Elsemiciclo negativo de dicha señal será eliminado mediante laetapa de salida (QI)' obteniéndose así las señales representadasen la figura 4.30. Cuando la señal de salida del amplificadoroperacional U l 8 (V 8) esté a nivel alto, el transistor Q1 se satu-rará y la salida PWM estará a nivel bajo.
De la misma forma, para VA= -Vcc= -] 5V, se obtiene Vss:
En el integrador Miller, la tensión de salida depende lineal-mente del tiempo:
Vss = _ - V CC
R3 R2+a2'P2
donde a¡·P¡ es la porción útil del potenciómetro.
La pendiente de la rampa será negativa si VA=+] 5V y positi-va si VA=-15V, tal y como se puede observar en la figura 4.28,en la que se representan las diferentes formas de onda.
El valor de cada uno de los semi períodos se obtiene de laforma:
Vs·V¡: V¡>VA
R3 R2+a2'P2
donde a2'P2 es la porción útil del potenciómetro.
Para VA=+Vcc=+ 15V, se obtiene VS8:
Teniendo en cuenta que los puntos de conmutación seobtendrán cuando la tensión en ambas bomas del amplificadoroperacional sean iguales (V1A+=V1A') y que no se derivacon'iente por las mismas:
Vs
La frecuencia de la onda de salida será, por tanto:
R2 + a2' P 2
4'R3'(RI +a¡'P¡) ·el
VA •+1SV
Vss
o
VsB
VB
+1SV
. Vtri(máx)
_1
-lSVTl T2
r" ~ .,
Vs +Vss
Vs8 Ts
Vlri(máx)
-1SVI I.W] I
¡ ¡
U Le+lSV
• 1
Figura 4.28. Generador de onda triangular y cuadrada (formas de onda). Figura 4.30. Formas de onda del modulador PWM.
© ITP,PARANINFO
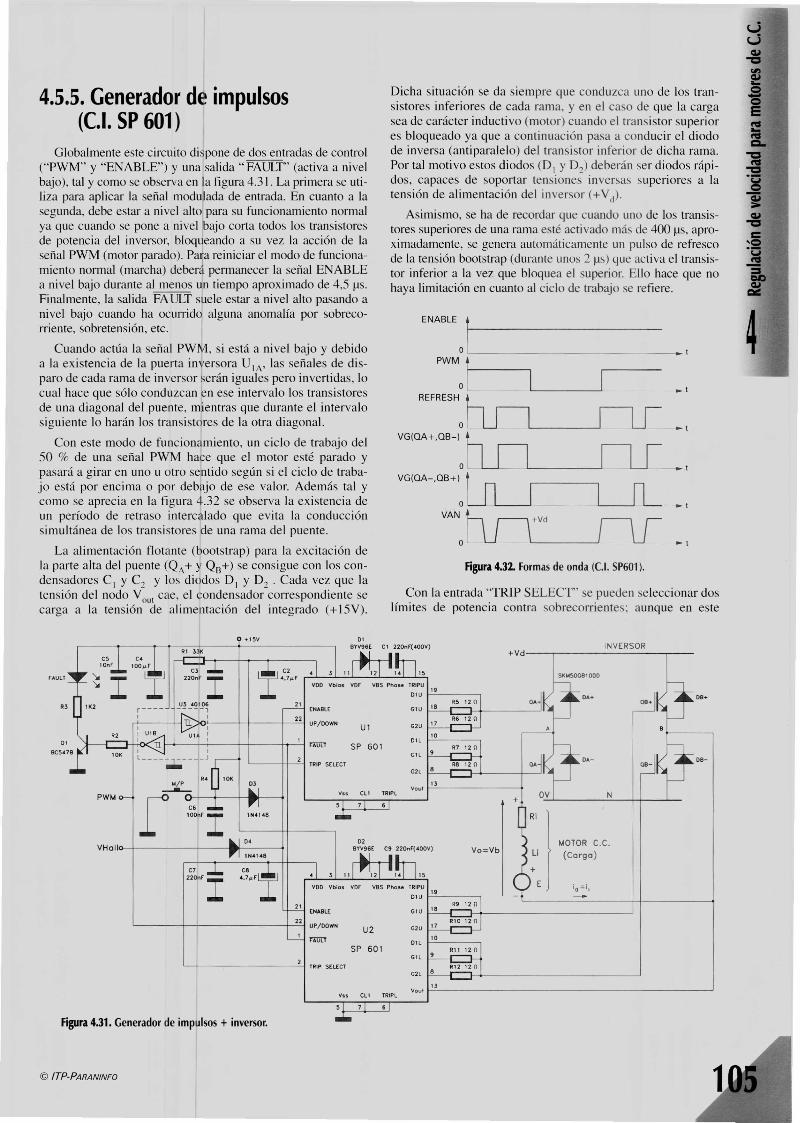
Figura 4.32. Formas de onda (CI. SP601).
Con la entrada "TRIP SELECT" se pueden seleccionar doslímites de potencia contra sobrecolTientes; aunque en este
·t
__.t
o
VAN
ENABLE r---------------0, _
PWM tI~---
o,.REFRESH
oVG(OA+,OB-) t
I
Dicha situación se da siempre que conduzca uno de los tran-sistores inferiores de cada rama, y en el caso de que la cargasea de carácter inductivo (motor) cuando el transistor superiores bloqueado ya que a continuación pasa a conducir el diodode inversa (antiparalelo) del transistor inferior de dicha rama.Por tal motivo estos diodos (DI y D2) deberán ser diodos rápi-dos, capaces de soportar tensiones inversas superiores a latensión de alimentación del inversor (+Vd).
Asimismo, se ha de recordar que cuando uno de los transis-tores superiores de una rama esté activado más de 400 Ils, apro-ximadamente, se genera automáticamente un pulso de refrescode la tensión bootstrap (durante unos 2 Ils) que activa el transis-tor inferior a la vez que bloquea el superior. Ello hace que nohaya limitación en cuanto al ciclo de trabajo se refiere.
4.5.5. Generador de impulsos(C.I. SP 601)
Globalmente este circuito dispone de dos entradas de control("PWM" y "ENABLE") Y una salida" FAULT" (activa a nivelbajo), tal y como se observa en la figura 4.31. La primera se uti-liza para aplicar la señal modulada de entrada. En cuanto a lasegunda, debe estar a nivel alto para su funcionamiento normalya que cuando se pone a nivel bajo corta todos los transistoresde potencia del inversor, bloqueando a su vez la acción de laseñal PWM (motor parado). Pa~a reiniciar el modo de funciona-miento normal (marcha) deberá permanecer la señal ENABLEa nivel bajo durante al menos un tiempo aproximado de 4,5 Ils.Finalmente, la salida FAULT suele estar a nivel alto pasando anivel bajo cuando ha ocurrido alguna anomalía por sobreco-rriente, sobretensión, etc.
Cuando actúa la señal PWM, si está a nivel bajo y debidoa la existencia de la puerta inversora U lA' las señales de dis-paro de cada rama de inversor serán iguales pero invertidas, locual hace que sólo conduzcan en ese intervalo los transistoresde una diagonal del puente, mientras que durante el intervalosiguiente lo harán los transistores de la otra diagonal.
Con este modo de funcionamiento, un ciclo de trabajo del50 % de una señal PWM hace que el motor esté parado ypasará a girar en uno u otro sentido según si el ciclo de traba-jo está por encima o por debajo de ese valor. Además tal ycomo se aprecia en la figura 4.32 se observa la existencia deun período de retraso intercalado que evita la conducciónsimultánea de los transistores de una rama del puente.
La alimentación flotante (bootstrap) para la excitación dela parte alta del puente (QA + y QB+) se consigue con los con-densadores CI y C2 Y los diodos DI Y D2 . Cada vez que latensión del nodo Voul cae, el condensador correspondiente secarga a la tensión de alimentación del integrado (+15V).
VHall MOTOR C.C.Va=Vb (Carga)
15
VDO Vbias VD' ves Phose TRIPU ,. io=i1
DIU -21 ,. R9 12 o
[HABLE GIU
22UPjOOWN 17
Rl0 12 oU2 G2U
rmu DIl10
SP 601 Rt 1 12 oGIL
TRIP SELECT R12 12 oG2L
Vout "VSS CU TRIPl
Figura 4.31. Generador de impulsos + inversor.
© ITP-PARANINFO
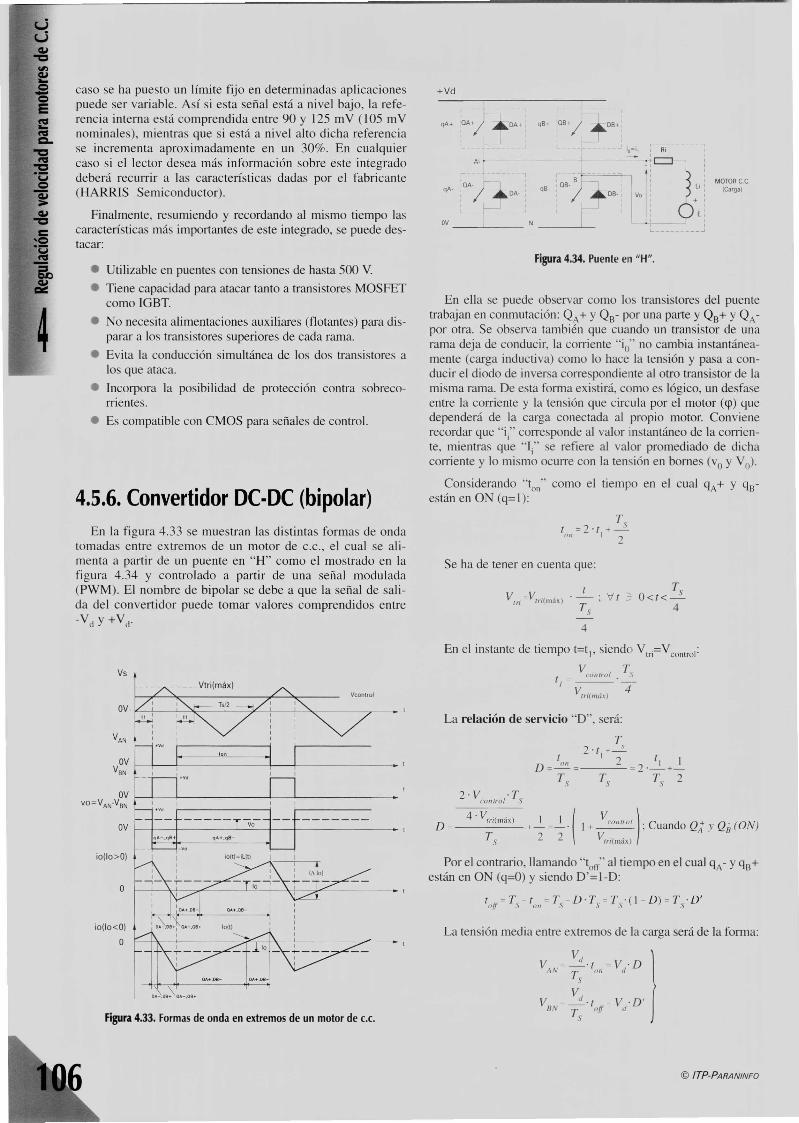
Se ha de tener en cuenta que:
Figura 4.34. Puente en "H",
MOTOR e c.(Carga)
TVI _ O<I<_s
4
T5I = 2'1 +----'--011 1 2
En ella se puede observar como los transistores del puentetrabajan en conmutación: QA+ y QB- por una parte y QB+ y QA-por otra. Se observa también que cuando un transistor de unarama deja de conducir, la corriente "io" no cambia instantánea-mente (carga inductiva) como lo hace la tensión y pasa a con-ducir el diodo de inversa correspondiente al otro transistor de lamisma rama. De esta forma existirá, como es lógico, un desfaseentre la corriente y la tensión que circula por el motor (cp) quedependerá de la carga conectada al propio motor. Convienerecordar que ''i¡'' corresponde al valor instantáneo de la corrien-te, mientras que "1;" se refiere al valor promediado de dichacomente y lo mismo ocurre con la tensión en bornes (vo y Vo)'
Considerando '\n" como el tiempo en el cual qA+ Y qB-están en ON (q=I):
• Utilizable en puentes con tensiones de hasta 500 Y.• Tiene capacidad para atacar tanto a transistores MOSFET
como lGBT.• No necesita alimentaciones auxiliares (flotantes) para dis-
parar a los transistores superiores de cada rama.• Evita la conducción simultánea de los dos transistores a
los que ataca.• Incorpora la posibilidad de protección contra sobreco-
n;entes.• Es compatible con CM OS para señales de control.
caso se ha puesto un límite fijo en determinadas aplicacionespuede ser variable. Así si esta señal está a nivel bajo, la refe-rencia interna está comprendida entre 90 y 125 mV (105 mVnominales), mientras que si está a nivel alto dicha referenciase incrementa aproximadamente en un 30%. En cualquiercaso si el lector desea más información sobre este integradodeberá recurrir a las características dadas por el fabricante(HARRIS Semiconductor).
Finalmente, resumiendo y recordando al mismo tiempo lascaracterísticas más importantes de este integrado, se puede des-tacar:
4.5.6. Convertidor DC-DC (bipolar)En la figura 4.33 se muestran las distintas formas de onda
tomadas entre extremos de un motor de C.C., el cual se ali-menta a partir de un puente en "H" como el mostrado en lafigura 4.34 y controlado a partir de una señal modulada(PWM). El nombre de bipolar se debe a que la señal de sali-da del convertidor puede tomar valores comprendidos entre-Vd Y +Vd·
Vs
OV
OV
io(lo>O)
o
ioilo<O)
o
Figura 4.33, Formas de onda en extremos de un motor de e.e.
En el instante de tiempo t=tl, siendo Vtri=Vcontrol:
V/T.ll=~'~
V,ri(má.:c) 4
La relación de servicio "O", será:
T2'1 +~
D =~ 1 _2__..2._1_,+...!.-
Ts Ts Ts 22'V ·Tconrro/ S
D =_4_'_V_trI_\In_áX_l_ +-21 = 21. ( 1+ Vcolltrol); Cuando Q: y Qñ (ON)Ts Vtri(lnáx)
Por el contrario, llamando '\rt al tiempo en el cual qA- Y qB+están en ON (q=O) y siendo 0'= 1-0:
La tensión media entre extremos de la carga será de la forma:
© ITP-PARANlNFO

D-T -R)s ,L¡
(-'I'R (VI-E») (Ri) VI-Ei (t) = / + ---' + ' . t =,. 1- -' t + -' -' t
I I L L I L L1 1 , I
(I'D)'TS'R, ( D-T'R)L, + V,,+ E. s .'3 = '[ = '2' e 1 _ e L¡R¡
Según el desarrollo de Taylor:
Jet) =j(O) + tf(O) + + t 11 .P"(O)n'
Linealizando la expresión exponencial de i¡(t) (se toman sólolos dos primeros términos del desarrollo):
Este modo de trabajo (q=O) es válido para O::;t ::;(l-D)'Tsy al final del mismo la corriente de carga se convierte en:i2[(l-D)'TsJ = 1]. Por tanto:
Este modo de trabajo (q=l) es válido para O ::; t ::;D . Ts y alfinal del mismo la corriente de carga se convierte en: i2(D'Ts )=12,
De forma similar, en modo de trabajo q=O, se obtiene:d i2V =L·--+R·i -E
" I dt I 2
La corriente por la carga, en este caso, será:
v - E K· V -E)V =E+R.' , =_,,_= co/l"ol" " I R R
, I
di (t)v (1) = R . I (t) + L . -'-
I " 'dt
v =V '[2.L(I+ V(,()/ltrol)-I]=V'[ VCO/ltro/]=K'Vo " 2 V " V co/ltrol
tri(máx) tri(máx)
donde:
Si D < 0,5 = Vo < O
Si D>0,5 = Vo>O
Por otra parte, el voltaje en bomes del motor y la corrientepor el inducido se pueden expresar también como la suma de suvalor medio (valor promediado) más la perturbación correspon-diente con respecto al punto de equilibrio:
vo(t) = v,,(t) = V" + v/t)
io(t) = i¡(t) = '¡ + i/t)
donde v/t) e i/t) son las perturbaciones de "vo" e ''i¡'' respecti-vamente. De esta forma, se puede expresar:
d iL(t)V (t)=i(l)'R+L--+E
" , "dtdi (t)
V + v (t) = E + R· [1 + i (t) ] + L· -'-b r I I r I di
Vdonde K es una constante, cuyo valor es: K = d
V1ri(tt1(U)
El signo de la tensión de salida depende de la relación de ser-vicio de la forma:
En la figura 4.35 se muestran los dos modos de funciona-miento del puente así como la forma de onda de la intensidad decorriente por la carga.
El incremento que experimenta la intensidad de corriente il'durante un tiempo igual a D-Ts (~ii=I2-II) será, por tanto, de laforma:
Figura 4.35. Modos de funcionamiento del inversor.
di (t)v (t) ~L-'-
, I d t
Ysuponiendo E=O, se obtiene que:
V·T·DtJ./ = " s
I L.,
R¡D-Ts D'TstJ.I.=-, '---+(V -E)'--, I L " L, ,
Asumiendo que las perturbaciones de la corriente de induci-do i/t) dependen principalmente de la inductancia L¡ y en menormedida de la resistencia del inducido R¡ (R¡ « roL¡), se puededecir que:QB+
q=oi2
QA- QB-_____ ---.3
r-QA+
Vd
q=1
~ ¿ 6¿qA+ qB+
• 1 Ri Li E rVd-=- A'1~1'1Bl__'i' Q~ __ . ~ ~. J QB-
Las variaciones de corriente pico a pico, para q=l, pueden sercalculadas de la forma: 4.5.7. Regulador de velocidad (PI)
di,V =L·-+R·i +E
" 'dt ,1
La solución de esta ecuación diferencial con una corrienteinicial il(O)=II' da como resultado una corriente de carga:
Para realizar la regulación de velocidad en lazo cerrado, seutilizará como regulador un amplificador operacional (U lB) tra-bajando en configuración de control proporcional-integral. Elprimer operacional (UIA) se comporta como un inversor y se
© ITp·PARANlNFO

La evolución de la señal de control del regulador "U" anteuna vaJ'iación del error, es la que se muestra también en la figu-ra 4.37.
coloca para invertir la tensión VN procedente de la etapa de"temporización lineal" con el fin de adecuar los signos de "e" y"-e," (figura 4.36).
-1
-1
1 -Kp(e-e ,)--.
R6
c:::J100K
-
-_1
R5 ~~V·a Yconl'ol
R7 O '7K
ai
I/(velocidad de giro)
Figura 4.37. Formas de onda del regulador de velocidad.
u •
-
Rl R3 Pl 25K 11u a c:::J . c:::J Q .
IOK 1r1 "r
cd- .''""'~ ~ ~c
R4 U 4K7
-e¡ o
Suponiendo el flujo de excitación constante, será necesariodetectar el valor de la intensidad consumida en cada momentopor el motor (1j), introduciendo la compensación correspondien-te al valor R¡·l¡ para obtener así la regulación de velocidad:
V-R·/.h 1 I
Figura 4.38. Regulador de intensidad (PI).
4.5.8. Regulador de intensidad (PI)En un motor de c,c. la cOITientede inducido (1¡)depende del
flujo magnético y del par motor (M). Si por cualquier motivocambiase el par motor como consecuencia de una variación delpar resistente de la caJ'ga, la corriente también variaría con locual se producirá un elTor (U-e) y el regulador de intensidad ten-derá a restablecer el nivel de corriente (par motor deseado).
Las consideraciones a efectuar son las mismas que en el regu-lador de velocidad, y solamente cabe reseñar que en la cadenade realimentación del regulador, la suma de (R3+a¡,P¡) debe serdel orden de diez veces infelior al caso anterior. De esta formase obtiene que:
R) + 0:, . P,1:=(R +0: .p )'C: 1:-R·C: K = ----
1 J 1 I tll 1 P RI
La construcción gráfica de la respuesta temporal, ante unescalón de error introducido, es la mostrada en la figura 4,39. Eneste caso la rampa de subida será mucho más rápida que en elregulador de velocidad, mientras que el factor de proporcionali-dad será aproximadamente diez veces menor.
K,'cI>
La regulación de intensidad (figura 4.38) adopta básicamen-te la misma configuración que el de velocidad, teniendo comoseñal de referencia la salida "U" del anterior. y como señal decomparación la tomada del valor real de la intensidad que sumi-nistra la etapa de potencia "ej'·.
0---11c= 100nF"
11C=47nr
11;'¡: I
1:' S1II
1+1:' S1
1:;=(R7+0:,'P,)'C
1:=R"C(11 )
SI
leYó 1R5 R7 Pl 100K ICI-~S?-Q' .
R(s) = Ves)e(s) - e ,(s)
.. ~~ :-Ve,' ~ou
.8~"K IO~~If~~KFigura 4.36. Regulador de velocidad (circuito PI).
-
R2 100K
'<o cJ S?vl100K ~;
Ii..082 V-0-15'1
O ~ev oR3 47K
donde:
Las señales de entrada a dicha etapa serán, por una parte,e=- VN o señal procedente del circuito de aceleración o decelera-ción de la señal de consigna (Vref) y por otro lado la señal "-ey"o señal de realimentación de velocidad que es proporcional a lavelocidad de giro del motor (dínamo tacoménica).
Tal y como se demostró en el apartado 4.3.4, la función detransferencia del regulador vale:
Se puede comprobar que variando el valor de C y/o a¡'P1 seconsiguen modificar las constantes de tiempo del regulador (Li yLa)' mientras que cortocircuitando dicho condensador (S, cerra-do) el regulador trabajará como control proporcional simple-mente. R7 y C I se colocan para estabilizar la señal de salida (U)y evitar así los cambios bruscos.
Conviene recordar que el ajuste del regulador para su funcio-namiento como control proporcional o integral se hará de formaindependiente en cada uno de los casos.
Tal y como se observa en la figura 4.37, la señal de error"E=e-e," puede ser tanto positiva como negativa según sea elvalor de la tensión de consigna, pues ambas señales han de tenersiempre signos contrarios. En efecto, suponiendo que inicial-mente el motor se encuentra parado (ey=O),si la tensión de refe-rencia "V rcf" es positiva "V N" también lo será, mientras que "e"tendrá signo contraJio. Al estar parado el motor, inicialmente"(e-e)<O", lo cual implica que el regulador evolucionará haciavalores positivos (VcOlllrol >0) Yel motor irá aumentando progre-sivamente su velocidad. La tensión de la dínamo "Vdínamo", quetiene signo contrario a la de consigna, también aumentaJ'á aligual que "e," que en este caso será positiva.
A medida que "ey" aumenta, "e-e y" se va reduciendo hastallegar a ser nula, momento en el cual la tensión de control seestabi liza al valor de referencia (Vrcf)'
En el supuesto de que la velocidad del motor disminuya debi-do a un aumento de la caJ'ga (par resistente), la tensión generadapor la dínamo también disminuirá y con ella la "ey" con lo cualla diferencia (e-ey ) aumentará y el regulador actuará hasta queel error sea nulo.
© ITP-PARANINFO

Figura 4.39. Formas de onda del regulador de intensidad.
80-
A
P2 100K R3 10K
4.5.10. Circuito de proteccióncontra sobrecorrientes
mV
R2
10K I~~mo_~6K ~6K
Figura 4.40. Circuito acondicionador de velocidad.
Vdíllama = Kdíllama . (n°. r.p.m.) = 40 ~~~Vuelta
Para ajustar la tensión de salida, se coloca el divisor de ten-sión formado por P1 y R) de tal forma que:
- el' = Ka' VdÚlOl1IO
donde Ka es la constante del acondicionador.
Se recuerda al lector que para el ajuste del regulador comoproporcional siempre debe existir un error (E) entre "e" y "ev".
Por otra parte, la tensión que proporciona la dínamotacométrica cambiará de signo al cambiar el sentido de girodel motor (cambio de signo de la tensión en bornes) y su valorvendrá dado por:
-Kp(U-e¡)
~~~~--~~~-, •. t
---~~~~~~--~- •. t
U-ej
~I~-
eo •
Conviene recordar que si aumenta el consumo de intensi-dad del motor (por aumentar el par resistente) aumentará lacaída interna "Ri·l/' (caída de tensión en el inducido) delmotor, tendiendo a disminuir su velocidad; hecho que no ocu-rrirá si dicha señal "-e;" se introduce también como realimen-tación positi va (previo acondicionamiento) como terceraentrada del regulador de velocidad. En este caso, al disminuirla velocidad, la referencia se ve fortalecida aumentando elerror, y por consiguiente, aumentará también la tensión decontrol "Y conlrol" en la proporción justa de dicha caída de ten-sión. En el caso de eliminar el regulador de intensidad,U=YCOnlro)'
La señal "-e/' (realimentación de intensidad) se obtiene apartir del circuito de protección contra sobrecorrientes, queestá formado por un sensor de efecto Hall y el cual entregauna señal de tensión proporcional a la corriente que circulapor el motor.
4.5.9. Circuito acondicionadorde velocidad
Este bloque (figura 4.40) será el encargado de generar unatensión "-ev" proporcional a la velocidad de giro del motor y delmismo rango que la tensión de consigna (± lOY); es decir, si"Y re/' varía entre ± IOY la tensión "-ev" también lo debe hacerentre esos márgenes.
En ocasiones, y como consecuencia de un aumento del parresistente (Mres)' la corriente absorbida por el motor (1) puedeverse incrementada hasta valores tales que puedan llegar adañar los elementos de potencia.
El circuito de la figura 4.41 está basado en una célula Hally se ocupa de proteger el sistema contra sobrecorrientes.
En efecto, se sabe que el elemento Hall (utilizado en estecaso) genera a su salida una tensión proporcional a la intensi-dad absorbida por el motor y que, en este caso, viene dada porla siguiente expresión:
Idet=li
Figura 4.41. Circuito de protección contra sobrecorrientes.
© ITP-PARANINFO

1 1V =4V·~=4V·_i-
11 1 11/011/ 110111
Si en lugar de cortar el campo una sola vez, lo cortamos doso tres veces (dos o tres vueltas al entrehierro), la tensión de sali-da se verá reducida por dos o por tres seaún el caso. Dicha ten-sión "Y H" es amplificada en la etapa no fnversora (U ) siendosu tensión a la salida: lB'
v = V . (1 + R3)
I H R2
Si, por cualquier motivo. la corriente absorbida por el motoraumenta, la tensión y) también lo hará, por lo que en el momen-to en que y» YR la salida del comparador (U2) conmutará(Yhall=OY) Y en la entrada ENABLE del CI. SP60I habrá tam-bién un "cero lógico" que hará que el motor se pare. Modifican-do el valor de YR se consigue variar la corriente máxima absor-bida por el motor. Para poner de nuevo en marcha al motorbastará con accionar de nuevo el pulsador de marcha "M".
Finalmente, la señal de realimentación de corriente "e." setoma a la salida del segundo operacional (Y)), si bien ant~s seIntroduce un divisor de tensión (Rs y P2) al objeto de conseauirel margen de señal deseado. b
© ITP-PARANINFO
.:. l. El motor de corriente continua: principio de funcio-namiento y parámetros más importantes (fuerza con-traelectromotriz, par motor, etc.)..:. 2. Modos de operación de un motor de corriente con-tinua.
.:. 3. Variación de la velocidad de un motor de corrientecontinua a par constante y a potencia constante.
.:. 4. Control analógico de sistemas: diagrama de bloques,función de transferencia..:. 5. Tipos de control más empleados en los sistemas deregulación industriales.
.:. 6. Función de transferencia de un motor de corrientecontinua para modelo en pequeña señal.
.:. 7. Diagrama de bloques de un regulador de velocidadpara motores de corriente continua. Indicar sus par-tes más importantes .
.:. 8. ¿Cuál es el objetivo fundamental del circuito de tem-porización lineal a utilizar en un regulador de velo-cidad para motores de corriente continua?
.:. 9. Influencia de las constantes de tiempo de acciónintegral ('ta¡) y tiempo de integración ('t¡) de uncontrol proporcional-integral en la respuesta delsistema .
.:. 10. Cálculo de la tensión media de salida (Vo) y de lasvariaciones de corriente de carga (L~I¡)para un con-vertidor DC-DC (bipolar).
© ITp·PARANlNFO


•• Conocer las característicasfitndamentales del motor asíncrono de corriente alterna asícomo el principio de funcionamiento de los mismos.
• Conocer y valorar los d(f"erentesmétodos de variación de velocidad del motor trifasicode jaula de ardilla.
• Describir con precisión y claridad el funcionamiento de los diferentes tipos de circuitosde regulación y control y el tratamiento de las señales eléctricas que procesan.
• Explicar el diagrama de bloques de un sistema electrónico de variación de velocidad deun motor de CA, indicando los elementos funcionales que lo constituyen, lafunción quedesempeña cada uno de ellos y las características específicas del mismo.
• Aplicar estructuralmente y conjiabilidad todos los procesos necesarios en el diseño depequeños circuitos de regulación y control.
• Identificar los circuitos básicos de la aplicación con la jitnción que realizan.
• Conocer con precisión y claridad, el jitncionamiento del regulador de velocidad de unmotor de inducción, así como sus características, tipo yformas de onda de las señales yel tratamiento de las mismas a lo largo de un determinado circuito.
• Enumerar y describir el tipo de sensores que se utilizan en la regulación de máquinas deCA.
• En varios casos prácticos de análisisjitncional de sistemas electrónicos de variación develocidad de motores eléctricos de CA:
• Enumerar las distintas secciones que componen la estructura del sistema de regula-ción (entradas, salidas, mando, regulación, fuerza, protección), indicando la jitnción,relación y características de cada una de ellas.
• Describir las características de jitncionamiento del sistema, diferenciando los distin-tos modos de jitncionamiento y sus características específicas.
• Calcular las magnitudes y parámetros básicos del sistema, contrastándolos con losvalores reales medidos en dicho sistema, explicando y justificando las variaciones odesviaciones que se encuentren.
• Efectuar la sintonía de los parámetros de regulación del equipo, realizando las prue-bas y medidas necesarias en los puntos notables del sistema, utilizando los instrumen-tos adecuados.

5.1. IntroducciónPoder variar la velocidad de un proceso o de un sistema, es
una necesidad que se plantea obligatoriamente en la mayoría delos sectores de la industria.
La aparición del control electrónico de los motores eléctricos,para variar y regular su velocidad, ha aportado a los procesosindustriales grandes ventajas, aumentando sus propias posibili-dades y prestaciones y reduciendo su mantenimiento de energíay consumo entre otras.
Tradicionalmente, la mayor parte de los problemas de regu-lación de máquinas eléctricas han sido resueltos mediante elmotor de corriente continua que, por su naturaleza, posee exce-lentes cualidades para ello. Sin embargo hoy en día se están uti-lizando en la industria nuevos tipos de motores (de pequeñapotencia) tales como los motores de "reluctancia magnética" ylos motores de "imanes permanentes (Brushless)" en los que laregulación no resulta tan compleja como sucede con los moto-res de inducción.
Comparando el motor de corriente continua con el de corrien-te alterna, el primero presenta las desventajas de mayor tamaño,precio y complejidad constructiva del colector que presenta cier-tos problemas de explotación y de mantenimiento, imponiendoademás ciertos límites de velocidad y de potencia. El motor deinducción de corriente alterna, tiene como principal inconve-niente la complejidad del convertidor electrónico necesario paravariar su velocidad. Aunque el motor de corriente continua esmás caro que el de con·iente alterna, el conjunto regulador-motor de comente altema supera en precio al de corriente con-tinua.
La aparición, en un principio, del Tiristor (SCR) y, másrecientemente, del transistor IGBT creado para trabajar enconmutación de potencia a altas tensiones, intensidades y fre-cuencias, han facilitado la regulación de todo tipo de motores engeneral y de éstos en particular, mediante la alimentación de fre-cuencia y tensión variables; consiguiendo así un control de velo-cidad y de par aceptable. Basta decir que hoy en día existen enel mercado convertidores de frecuencia para motores asíncronoscon una gama de potencias que van desde unos pocos KW hastavarios cientos. Generalmente en la mayoría de los fabricantes elsemiconductor empleado en el ondulador de salida suele ser elIGBT, aunque para potencias superiores a la indicada se sueleutilizar también el TIRISTOR y el GTO.
Respecto al margen de velocidad a controlar, se puede decirque los modernos variadores de velocidad que existen actual-mente en el mercado son capaces de proporcionar una frecuen-cia de salida de hasta 500Hz (o incluso superior), lo cual permi-te controlar la velocidad del motor entre cero y diez veces suvelocidad nominal, aproximadamente. Entre los fabricantes másimportantes que se dedican a comerciar con este tipo de varia-dores están: SIEMENS, GRUPO SCHNErDER, ABB,KLOCKNER MOELLER, POWER CONTROLS, etc.
5.2. Principios de funcionamientodel motor de inducción
Los motores trifásicos de comente alterna son notables porsu simplicidad de constitución; sin embargo, esta simplicidad
contrasta con la complejidad de los sistemas de control que fun-cionan en condiciones variables de velocidad y de carga.
La máquina asíncrona, al igual que todas las demás máquinaseléctricas, es reversible, lo cual quiere decir que puede trabajarcomo generador y como motor. Generalmente funciona comomotor, ya que como generador debe trabajar en paralelo conotras máquinas que le suministren la corriente de magnetizaciónnecesaria y tienen peor rendimiento que los generadores asín-cronos.
Los motores asíncronos pueden ser monofásicos o trifásicosy dentro de estos últimos, pueden ser a su vez:
• De anillos rozantes• De jaula de ardilla
Los dos tipos se basan en los mismos principios de funcio-namiento, existiendo diferencias en la construcción del ele-mento secundario o rotor. En el presente capítulo se va a tra-tar sólo y exclusivamente el control de motores de "jaula deardilla" por lo que todas las referencias irán encaminadas aeste tipo de motores.
El motor de c.a. trifásico consta de un estator bobinado,conectado a una alimentación de con·iente alterna trifásica[U(A), V(B), W(C»), el cual está formado por un núcleo dechapa magnética, disponiendo un devanado trifásico distribuidoen las ranuras de la superficie cilíndrica interior del estator.
Posee también un rotor en forma de "jaula de ardilla", sinconexiones exteriores, el cual está formado por un conjunto dechapas apiladas formando un cilindro. Los conductores estánigualmente repartidos y colocados en la periferia de la estructu-ra magnética dentro de las ranuras. Dichos conductores no vanaislados y constan de unas barras de cobre o aluminio que tienensus terminales puestos en cortocircuito por medio de un anilloen cada extremo. El número de polos del rotor de "jaula de ardi-lla" debe ser siempre igual al número de polos del estator con elque trabaja.
Básicamente, el principio de funcionamiento de un motorasíncrono es el siguiente: al aplicar un sistema trifásico de ten-siones de frecuencia (fl) al devanado estatórico, se produce unafuerza magnetomotriz móvil distribuida senoidalmente en elentrehielTo, que da origen a un campo magnético giratorio cuyavelocidad viene dada por la siguiente expresión:
6011nl=--p
2·n1¡
p
donde: • 11, es la velocidad de sincronismo en r.p.m.•1, es la frecuencia de alimentación del estator en Hz.• p es el número de pares de polos del motor.• 0), es la velocidad angular de sincronismo en radia-
nes/segundo.
En los conductores del devanado del rotor, este campo gira-torio inducirá unas fuerzas electromotrices que, al estar en cor-tocircuito, darán origen a unas corrientes que circularán por losconductores del rotor. Dichas corrientes, en presencia del campomagnético, harán que sobre los conductores actúen unas fuerzasel! xl· V)que producen un par que de acuerdo con la ley de Lenzhace que el rotor tienda a seguir el campo del estator. En la figu-ra 5.1(a) se muestra, en un instante dado, el sentido de la induc-ción (lf> en el entrehierro producida por el devanado del estator.
© ITP-PARANlNFO

S (Deslizamiento)
n1 (Veloe. siner.)2n.-!--_-,
Velocidad
GENERADOR-:- Motor estándar
Figura 5.2. Curva par-velocidad.
~~0.8 0,6 0,-4
MOTOR
-~ Deslizamiento
5.3. Placa de bornes deun motor asíncrono
Bajo condiciones de arranque directo, el deslizamiento rela-tivo es la unidad, de forma que tanto la frecuencia en el rotarcomo la reactancia son elevadas, lo cual implica una elevadacorriente en el motor con un factor de potencia (cos <p)bajo, demodo que el par de arranque también será bajo.
En la figura 5.2 se muestra la variación del par útil (MÚ1il) enfunción del deslizamiento relativo en un motor de '~aula de ardi-lla" típico. La curva se ha extendido al modo de funcionamien-to como generador, en el que la velocidad del motor es máselevada que la de sincronismo. En esta región en la que la cargaexcita al motor a velocidades supeliores a la de sincronismo, elmotor convierte la energía mecánica en energía eléctrica que esabsorbida parcialmente por el sistema convertidor o retornada ala alimentación. Esto sólo puede ocurrir en un sistema de fre-cuencia variable, cuando se reduce rápidaI11entela frecuencia dealimentación (fl).
La placa de bornes de un motor asíncrono lleva generalmen-te seis terminales directamente unidos a los dos extremos decada ulla de las dos fases del estator; éstas reciben denomina-ciones normalizadas de tal forma que los principios de las fasesse suelen representar con la letras UI(A), VI(B), W1(C) y losfinales con U2, V2 YW2'
Tal y como se observa en la figura 5.3, los terminales de faseU2, V2 y W2 no están alineados con los principios de fase Ui'VI' W l' Esto se hace para logral' una fácil conexión en triángu-lo, uniendo (mediante pletinas de cobre) los terminales que seenfrentan.
Mútil (Par)
b)alFigura 5.1. Motor de corriente alterna: a) Entrehierro¡
b) Sentido de la fuerza en el motor.
11 - 11S~-]-
11]
El sentido de dicha f.e.m. se obtiene aplicando la regla de la"mano derecha", resultando en los conductores del rotor unascorrientes cuyo sentido se indica en la misma figura. El sentidode la fuerza que aparecerá en los conductores de rotor se indicaen la figura 5.I(b) donde se muestra con detalle la fornla en quevalían las líneas de Balrededor de un conductor; el sentido seobtiene, en este caso, aplicando la regla de la "mano izquierda".Como se ve el sentido de la fuerza es el mismo que el del campogiratorio, de tal forma que si el par resultante de estas fuerzas esmayor que el par de la carga, el rotor tenderá a acelerarse,siguiendo el Call1pOdel estator. Cuando este "par interno" delmotor se hace igual al par de la carga, cesa la aceleración y lamáquina se mueve a velocidad constante "n" (r.p.m.).
Esta velocidad de giro (n) del motor, nunca puede igualarse ala de sincronismo (ni) ya que entonces no se produciría corte deflujo en el devanado del rotor. Se denomina deslizamiento (S) ala velocidad que lleva el campo giratorio del estator con respec-to al rotor. Expresada en tanto por uno viene dada por:
Las zonas donde se observa mayores concentraciones de líneasde inducción indican valores más elevados de esta magnitud,observándose una distribución de tipo senoidal. La f.e.m. indu-cida (71) en un conductor de longitud (1) que se mueve con unavelocidad (v) dentro de un campo magnético de inducción (11)es de la forma:
Denominando "00" a la velocidad angular del rotar, expresa-da en radianes/segundo:
U1 (A) V1 (B] W1 (C)r--\:--X--¡l--A---~~\..J
2 'TI'11w~---60
Debido a esta velocidad relativa, la velocidad angular con laque el campo del estator corta a los conductores del rotar valdrá: W2 U2 V2
2TI "12W2~W]-W~--;
p
donde "f2 " es la frecuencia de las corrientes que circulan por losconductores del rotar.
Como la impedancia del motor es baja, un pequeño aumentodel deslizamiento, provoca un gran aumento de la corriente delrotor. Generalmente el deslizamiento a plena carga suele estarcomprendido entre un 2 y un 8%, aproximadamente.
© ITP-PARANlNFO
A
[-i--- ----!- ------~-1¡ Ul Vl Wl J
: W2 U2 V2:
l_~ 5:~ ~~jCONEXION EXTRELLA
Figura 5.3. Placa de bornes de un motor de c.a.

R'2 1~S [)
R'2 X'2r----I ~~YY-Y'l--.J1'2
11,O z • Vs = Vl
X1rYYY'\
IL
R1c:=J
VLL
A(U) o•
B (V) o
donde: • P, es la potencia activa absorbida por el motor en W.• Q, es la potencia reactiva absorbida por el motor en
YAR.• S, es la potencia aparente absorbida por el motor en
YA.• V, es la tensión simple o de fase.• 1, es la corriente de fase en A.• qJ, es el ángulo de desfase entre Y 1 e 11,
~ 11 ~
IFe,
V1 ORFe
Figura 5.4. Circuito equivalente aproximado para un motor de c.a.
5.5. Balance de potenciasen el motor asíncrono
El objetivo de un motor asíncrono es la transformación dela energía eléctrica absorbida de la red, en energía mecánicadisponible en el eje. La energía se transfiere del estator alrotar a través del entrehierro, donde están relacionadas lasfuerzas de origen electromagnético que se desarrollan en elmotor, fuerzas que crean un momento de rotación que es elpar electromagnético de la máquina.
Si el devanado del estator está conectado en estrella, tal ycomo sucede en la figura 5.5, la potencia que el motor absor-be de la red será:
Para invertir el sentido de giro del motor bastará con inter-cambiar dos fases de la red entre sí, con lo cual se invielte tam-bién el sentido del campo giratorio.
Por ejemplo, para un motor en cuya placa de característicasfigura: 220/380 Y; 6,2/3,6 A; 2 CY; 1410 r.p.m.; cos<p=0,81,quiere decir que se trata de un motor de 2 CY( 1,47 KW) depotencia, que girando a una velocidad de 1.410 r.p.m. yconectado en triángulo a una red de 220 Y absorbe unacorriente de 6,2 A, mientras que conectado en estrella a 380 Yconsume 3,6 A.
Las frecuencias de los circuitos primario y secundario sonidénticas e iguales a "fl" y, al igual que ocurre con los transfor-madores, podrá reducirse el secundario al primario teniendo encuenta las relaciones de transformación de tensiones y con-ien-teso Además, para realizar dicha aproximación se supone tam-bién que las corrientes primaJia y secundaJia son muy similaresen magnitud.
5.4. Circuito equivalentede un motor de C.A
Cuando se conecta el devanado en estrella, será cuando almotor se le pueda aplicar la tensión más elevada indicada en laplaca de características; sin embargo, cuando se conecta entriángulo, se le aplica la tensión más baja.
Un motor asíncrono en reposo puede compararse con untransformador, en el que el primario es el estator y el secundarioel rotar. La diferencia física estriba en que el motor dispone deun alTollamiento en el primario y su secundario (rotar) puedeaproximarse a un nuevo devanado.
Cuando el motor gira a una velocidad "n", la frecuencia delas corrientes rotóricas "f2 " dan origen a su vez a un campomagnético de velocidad "n2", de tal forma que la velocidadtotal del campo magnético giratorio en el estator será:nl=n+n2, por lo que el campo del rotar girará en sincronismocon el del estator.
Se demuestra que el circuito equivalente aproximado de unmotor de c.a. reducido al primario es el mostrado en la fi-gura 5.4, donde se aprecia que las magnitudes presentes lo sonde fase. Para conocer algunos de los parámetros del motor(RI, R'2' Xcc) será necesario realizar previamente un ensayoen vaCÍo y en cortocircuito con el motor en cuestión, donde:
• R Fe es la resistencia de pérdidas en el hierro.
• XJl es la reactancia magnetizante (rama de vacío).
• Xcc = X,+X'z es la reactancia de cOI1ocircuito.
• X'z es la reactancia del secundario reducido al primario.
• X, es la reactancia del primario.
• R'z es la resistencia del secundario reducida al primario.
• R, es la resistencia del primario.
• R'z [(l-S)/S] es la resistencia de carga reducida al pri-mano.
C(W)O
Figura 5.5. Conexión en estrella del estator.
P VI' d 'uesto que '1 = 'L Y VI =~, a potencia se po ra expresarde la forma: {3
© ITP,PARANINFO

1donde se ha tenido en cuenta que 11 = Js y VI = VLL"
Pútil
I ENTREHIERRO ROTORESTATOR
PC1 PFe1 PCu2 Pmec
Figura 5.7. Balance de potencias en el motor asíncrono.
I-SP = P . Pc = 3 . 1',2 . R'? . --
1/11 a L/2 L - S
P CII2 3 . l' l .R' 2 SP I-S 2 I-S
1/1; 3 . R' . -- . l'2 S 2
La potencia mecánica interna que desarrolla el motor serápues:
La potencia útil en el eje será menor debido a las pérdidasmecánicas (Pmec) por rozamiento y ventilación.
En cuanto al rendimiento del motor, expresado en tanto porcien, será:
- ..IL
VLL
A (U) 0- -
• - ---.~11
z(/> ~z~VS=V'
B (V) o~~~----------C:::J-~I
_____ JC(W) 0-
donde: • VI =Vs es la tensión simple o de fase.• VAB =VLL es la tensión compuesta o de línea.• 1L es la corriente de línea.• 11 es la corriente de fase.
Si por el contrario, el devanado está conectado en triángulo(figura 5.6), la potencia en este caso será:
P1 = -V3. VLL· IL· cos <J'I )Q¡ = -V3 . VL¿ . I¿ . sen <J'I
SI = -V3. V¿¿· I¿
Figura 5.6. Conexión en triángulo del estator.
Por otra parte:
2 'TI' 11 M = P,í/ll P,ílil 60· P úlilú> = ~~- :::::l> útil ---
60 ú> 2 . TI • 11 2 . TI • 11
1 5 2 R'? P CII,P =P+P =3'/' 2·R, '~--+3'1' 2·R, =3·/' ._0 =--'
a mi CII, 2 2 5 2 2 5 5
5
60
P cu,
P{/
Pa
P ._1_-_5cu, S
M=-----2'TI '111--'(1-5)60
M.I
ú>
11 = 111 • (1 - 5)
P=P .1-5mi C"2 S
P Cu .Puesto que P u = --' , se obtIene:
5
60Debido a las pérdidas mecánicas, el par útil es inferior al par
interno (M) cuyo valor es:
donde se relaciona las pérdidas en el cobre del rotor con lapotencia que llega al campo giratorio. Esta expresión resulta degran importancia práctica, pues muestra como al aumentar eldeslizamiento "S" (por ejemplo, variando la velocidad) las pér-didas en el cobre del rotor aumentan proporcionalmente.
El par útil en el eje (Mú1il)' en función de la potencia útil y dela velocidad angular será:
60Tomando como referencia el circuito equivalente aproxima-
do (figura 5.4) se puede obtener la variación del par interno enfunción de los parámetros del motor:
En lo que se refiere a las pérdidas en el hierro del rotor, seconsideran despreciables debido a la baja frecuencia de lavariación del campo en el mismo.
En la figura 5.7 se representa el balance de potencias en unmotor de c.a. asíncrono.
P = 3· R' . l' 2CL/2 2 2
© /TP·PARANlNFO
La potencia electromagnética transmitida al rotor a travésdel entrehierro, que constituye la potencia del campo girato-rio (Pa)' tendrá por valor:
Pa=PI-PCLq -PFe¡
Si no existen pérdidas en el rotor, esta potencia se transfor-maría directamente en potencia mecánica. En la realidad, alfluir la corriente por el devanado del rotor, aparecen en él unaspérdidas por "efecto Joule"que son las pérdidas en el cobredel rotor:
Una parte de esta potencia se transforma en calor por"efecto Joule" en los devanados del estator, constituyendo asílas pérdidas en el cobre del estator (PCU1)' de valor:
P CII¡ = 3 . R 1 • 112
Puesto que el estator está construido con material ferro-magnético, existirán también pérdidas en el hierro. Al ser lasfrecuencias de las corrientes en el rotor muy pequeñas debidoa que los deslizamientos suelen ser también pequeños, se con-sidera que el estator es el único causante de las pérdidas en elhierro, las cuales son:
PFe", PFel '" 3· VI ·IFe

R' 2 o3·_·V-5 I
M,= [2 . n .2 (R +~) 2 +
60 I 5
También se puede obtener la expresión del par en función delflujo máximo, expresión que puede dar una visión más física delproblema.
R 1Si se tiene en cuenta _2_· _2_ = E2 . COS qJ2' el par interno
Sse puede expresar de la forma:
3M,=-·E2·/2·cos <jJ2wl
Por otra parte, el valor instantáneo de la f.e.m. inducida en elrotor y su valor eficaz, teniendo en cuenta que (02 = 2 . 1t .12,son:
fl
)
11 = 60·-I P 11
11=60'-'(1-5)11
1-11 P
5=--111
de donde se deduce que variando el deslizamiento (S), la fre-cuencia (fl) o el número de pares de polos (p) se consigue variarla velocidad del motor.
Este último método, que a pesar de ser muy simple apenas seutiliza, consiste simplemente en modificar las conexiones de losdevanados del estator utilizando para ello un conmutador, con locual se varía el número de polos de la máquina. Los métodosmás utilizados son los siguientes:
5.6.1. Control por variaciónde la tensión estatórica
Cuando un motor asíncrono trabaja en carga, la velocidad seestabiliza a un cierto valor en el que el par motor (Múti¡) y el parresistente (Mrcs) son iguales. El ajuste del par se realiza median-te el incremento del deslizamiento por encima del resultante envacío.
En el apartado anterior se comprobó que el par es funciónproporcional del cuadrado de la tensión estatórica (Y 1)' por loque reduciendo ésta, se obtiene también una reducción del partal y como muestra la figura 5.8. De esta forma se consigueregular la velocidad a costa de aumentar el deslizamiento.
Figura 5.8. Variación del par normalizado en función del deslizamiento.
d<p )eo=-No'--=-N 'wo"<P /. ·cosw I- - dI 2 - max 2
N ·W· . 2·n··N· .E ( ) 2 2 <Pmax 12 2 <Pmax 12 j' N A..rms = - -n'v"-' . ''1'
2 .f2. {2 2 2 máx
Sustituyendo:
M=~·n-{i·f·N·A.. ./ 'COSIn =K·A.. ./ 'COSInI 2 2 '+'máx 2 """'2 \fJmáx 2 "t'2wl
Mútil
MN(Par normalizado)
Vl N (Tensión estatórica nomInal)
•. s (Deshzamiento)
donde K es una constante y N2 es el número de espiras por fasedel secundario.
Despreciando el valor de la resistencia del estator (R¡), elvalor eficaz de la tensión estatórica será similar a la f.e.m. indu-cida en el estator, con lo cual:
VI ~ El = n'y!2' NI 11 .<Pmáx
Por tanto, para que el flujo se mantenga constante:VI
<P . =cte. = -=ctemax f
l
5.6. Variación de la velocidaden el motor asíncrono
Se sabe que la velocidad del rotor de un motor de inducción,en revoluciones por minuto (r.p.m.), viene expresado por laecuación:
Se trata más de un control de deslizamiento que de un controlde velocidad, puesto que la velocidad asíncrona (ni) no cambia.De hecho, mediante este sistema, en vacío la velocidad apenaspuede variarse. Este método de control es de bajo rendimiento,ya que al funcionar con deslizamiento elevado hace que las pér-didas en el rotor aumenten.
5.6.2. Control por variaciónde la frecuencia
Como su propio nombre indica, se basa en el control de lavelocidad a través de la variación de la frecuencia de la tensiónde alimentación. Básicamente consiste en el empleo de determi-nados circuitos estáticos que partiendo de la frecuencia de la redtrifásica generan una tensión también trifásica de frecuencia dis-tinta (fija o variable) a la de la red.
Conviene recordar que hoy en día, para regular la veloci-dad de estas máquinas, también se utilizan circuitos integra-
© ITP-PARANlNFO

dos de alta escala de integración tales como los "microcon-troladores". En este caso se ha optado por la primera opción,la cual se adapta mejor a los objetivos que se pretenden conesta obra. En cualquier caso, una gran parte del reguladorsería análoga tanto si se utiliza un circuito integrado específi-co como un microcontroJador.
Este método permite una regulación de velocidad con unbuen rendimiento en una amplia gama de frecuencias de traba-jo, que abarca desde valores muy superiores a la velocidadnominal del motor (nN) hasta velocidad nula y en ambos senti-dos, todo ello manteniendo un elevado par motor.
Por lo que respecta a los modernos equipos de regulación queexisten actualmente en el mercado, las técnicas de control queutilizan principalmente se pueden resumir en:
• Control V/f: Tensión/frecuencia. Es el más utilizado.• ControlI/f: Intensidad/frecuencia.• Control vectorial del flujo magnético: Par constante.
En el caso concreto de motores de jaula de ardilla, si dismi-nuye la frecuencia (fl) sin disminuir, en el mismo instante detiempo, la tensión de alimentación (V 1)' aparecen consumosinadmisibles, tanto mayores cuanto menores sean las frecuen-cias. En estas condiciones, la transformación de energía eléctri-ca en mecánica se efectúa en pésimas condiciones de rendi-miento, por efectuarla con altas densidades de flujo en elentrehierro.
Las condiciones óptimas de funcionamiento de un motor deinducción se consiguen manteniendo constante el flujo eficaz enel entrehierro, sea cual sea la frecuencia y a cualquier par trans-mitido. Es necesario recordar que la tensión de fase en el estator(VI) vale:
por lo que si se mantiene constante el flujo (<pmax=cte.),el parmotor también lo será. Este echo se consigue manteniendo cons-tante la relación: V /fl' de tal forma que:
VI-= K = cte. = <1> =cte.1
1I max
En estas condiciones, se cumple que VI=KI • fl•
Así, en la parte útil de la curva, se obtiene una familia derectas sensiblemente paralelas, lo que corresponde desde elpunto de vista técnico a una buena regulación de velocidad(figura 5.9).
Mútil (Par útil)
n (Velocidad)
Figura 5.9. Variación del par útil en función de la velocidad.
Se observa que para frecuencias bajas (velocidades bajas) sehace muy significativo el efecto de las resistencias frente a lasinductancias. Así, la caída de tensión (RI·I 1) en la resistencia delestator ya no es despreciable frente a la tensión de alimentación(V 1)' que también ha disminuido proporcionalmente a la fre-
© ITp·PARANINFO
cuencia. En estas condiciones ya no es posible aceptar comobuena relación (V 1'" El)' necesaria para que el flujo máximo semantenga constante. Para compensar este efecto se suele incre-mentar la tensión de alimentación (V 1)' como más adelante sedetallará, aproximadamente un 15 % sobre su valor nominalpara frecuencias bajas.
En la figura 5.10 se muestran los cuatro modos de funciona-miento del motor asíncrono.
V1 = cte
- n (11)
Potencia cte. (V1 =cte)
Figura 5.10. Modos de funcionamiento de un motor asíncrono.
Si a partir de la velocidad nominal "n N" (frecuencia nominal)se incrementa la frecuencia, manteniendo constante la tensiónVI' se obtiene la característica del motor funcionando a poten-cia constante, sufriendo el par una debilitación en funciónhiperbólica. Se obtiene así un control sobre el motor asíncronoen los cuatro cuadrantes, al igual que sucedía con el motor decorriente ontinua. Si por el contrario, por debajo de la veloci-dad nominal, se mantiene constante el flujo y se varía igual-mente la frecuencia, se obtiene la característica del motor a parconstante. Cuando el motor gire en sentido contrario se vuelvena repetir las dos situaciones anteriores.
5.7. Circuito integrado"HEF 4752VP" para el controlde motores asíncronos.Características
El control de motores de c.a. mediante la técnica de conmu-tación por modulación de anchura de impulsos proporciona laventaja de un par suave a baja velocidad y, además, poder con-trolar la velocidad de cero al doble de su velocidad nominal consolamente unas pequeñas pérdidas de su rendimiento.
En la figura 5.11 se muestra una portadora de 15 impulsos(a), las tres señales de tensión entre fase y N(OV) que coincidiráncon las tres señales de disparo (VGA+, VGé, VGC+) de los tran-sistores superiores del puente trifásico (b, c, d), así como la ten-sión entre dos fases Vu v=V A-S (e).
Portadora Jal ~ O O O O O O O O O O O O O D.l.- t
VA(QA+I ) j
bl '''h O ODOD O O O O O O O n nVBIQB+I ,
el '''0 O O O O O O DOD O O O O OVCIQC+I ,
d) +Vd
VAB=VA-VB •.
el '"°IlILDJlJlJill.llJLlllU::l!nú1JlrUUUlfUuUlflJ.L- 1
100t/"
Figura 5.11. Formas de onda PWM senoidales de 15 impulsos por ciclo.

Figura 5.13. Disposición depatillas del circuito integrado
HEF 4752.
VDD
21 OBM2
HEF4752
8 OAMl Fase principalA9 OAM2 Fase principalA10 OASl Conmutación fase A11 OAS2 Conmutación fase A22 OBMl Fase principalB
Señales de 21 OBM2 Fase principalBexcitación del 20 OBSl Conmutación fase Binversor19 OBS2 Conmutación fase B3 OCMl Fase principalC2 OCM2 Fase principalC1 OCSl Conmutación fase C
27 OCS2 Conmutación fase C24 L Dato25 I Dato7 K DatoEntradas 5 CW Datode datos13 X Dato15 y Dato16 Z Dato12 FCT Relojfrecuencia
Entradas 17 VCT Relojtensiónde reloj 4 RCT Relojreferencia
6 OCT Relojretardo salida23 ASYN Sincronizaciónfase A
Salidas 26 VAV Tensión mediade control 18 CSP Impulsos muestra
de corriente
T•••• 5.2. TenainaIes del CL HEF4
OCS1 1
OCM2 2
OCM1 ,
RCT •
OAM1 •
OAM2. 9
OAS1 10
OAS2 11
En la tabla 5.2 se indica cada uno de los mencionados termi-nales del circuito integrado, indicando el número de pin, deno-minación y función.
La figura 5.13 muestra la disposición de patillas de este cir-cuito integrado, las cuales, sin incluir las de alimentación, sepueden agrupar en cuatro apartados según su función.
• Señales de excitación del inver oro• Entradas de datos.• Entradas de reloj.
Salidas de control.
5.7.1. Funciones de entrada/salidadel Col. HEF 4752
f5 =-.!.-(frec. de conmutación)T5
j4a 6,4 675 a 1070
5,7 a 8,9 675 a 10708,1 a 17,9 675 a 107011,2a 17,9 675 a 107016,3 a 25,5 42 675 a 107022,3 a 35,7 30 675 a 1070
32,5 a 51 21 675 a 1070
44,6 a 70 15 675 a 1070
>70 15 Veáse figura 5.16
Portadoracon los dos
frentesmodulados
Portadora
Tabla L1. VIIaIes tfpicoI dellII6IIipIo de la portidora, de la fnlcueIIda de salida.
La modulación senoidal de las formas de onda de salida seconsigue abriendo y cerrando los elementos de potencia delpuente (MOSFET, IGBT, etc.) superior e inferior de cada fasedel inversor. La función del CJ. HEF 4752 es proporcionar trespares de señales moduladas que al ser aplicadas al circuito depuerta de los seis elementos del puente generen tres señales desalida trifásicas desfasadas entre sí 120 0.
8=0 81 82 83 84 85 86
Figura 5.12. Detalle de la modulación de doble frente.
Asimismo, en la figura 5.12 se muestra con más detalle lamodulación de una onda portadora en ambos frentes. En ella seobserva que los dos flancos de cada impulso son moduladospara dar una diferencia media de tensión que varía senoidal-mente entre dos fases cualesquiera de salida. Cada frente de laportadora es modulada por un tiempo variable "o" que es pro-porcional al "sen u", siendo "u" el desplazamiento angular delfrente no modulado. La modulación de una portadora de 15impulsos exige por tanto 30 valores de "o".
El CJ. HEF 4752 es completamente digital, de forma que lafrecuencia de repetición de las señales de disparo o frecuenciade conmutación del inversor (f
5) es siempre un múltiplo entero
(mf) de la frecuencia de salida del inversor (fou1); es decir:f = mf·f lo cual da como resultado un equilibrio entre fases ys out'bajas pérdidas. Cuando se trabaja en estas regiones se incluyeuna histéresis entre los puntos de conmutación para evitar laoscilación. En la tabla 5.1 se muestran los valores típicos delmúltiplo de la portadora y de la frecuencia de salida (fou1)'
Dentro de estos valores el circuito integrado proporciona elcontrol completo de la frecuencia de conmutación del inversorpara un margen de frecuencias comprendido entre 4 y 70 Hzaproximadamente. Para frecuencias superiores será necesarioaumentar la frecuencia de conmutación como más adelante setratará.
© ITP-PARANlNFO

5.7.1.1. Señales excitadoras del inversorExisten seis salidas excitadoras principales que están dis-
puestas por pares complementarios. Las salidas están codifica-das como sigue:
Primera letra: O (salida).Segunda letra: A, B o C (indicación de fase).Tercera letra: M (principal).Número: 1para la salida del elemento superior del puente.
2 para la salida del elemento inferior del puente.
Por ejemplo, OAM2 es la forma de onda excitadora para elelemento inferior de la fase A.
A cada salida principal está asociada una salida auxiliar utili-zada para disparar puentes inversores con 12 tiristores. Estassalidas se identifican con S como tercera letra del código de pati-llas, de forma que OAS2 será la salida de disparo para la con-mutación asociada a la OAM2.
5.7.1.2. Entrada de datos5.7.1.2.1. Entrada de datos 1, K YL
La entrada ''{'' determina si las señales de excitación delinversor son para transistores o para tiristores. Un nivel bajoen dicha entrada corresponde a transistores, y un nivel alto atiristores.
La entrada de datos "K", en combinación con la entrada dereloj "OCT", se utiliza para ajustar la duración del período deretraso intercalado. Los detalles de este ajuste se describen en elapartado dedicado al reloj "OCT'.
La entrada "L" proporciona la posibilidad de arranque/paro.Con salida para transistores, "L" en estado bajo, todas las seña-les principales y de conmutación están inhibidas y con "L" enestado alto continua entregándose el conjunto de impulsosmodulados. La acción de "L" inhibe solamente los circuitos desalida reales, de tal manera que mientras "L" está a nivel bajo,los circuitos internos que generan los impulsos de salida con-tinúan funcionando.
5.7.1.2.2. Entrada de datos CW
durante el funcionamiento normal, y por tanto deberán serconectadas a OY.
5.7.1.3. Entradas de reloj5.7.1.3.1. Reloj de control de frecuencia de salida Fer
La entrada de reloj "FCT" controla la frecuencia de salida delinversor "fou/' y, por tanto, la velocidad del motor. La frecuen-cia a ella aplicada "fFer" está relacionada con "fou/' según laexpresión: fFCT = 3360 .f01l1"
5.7.1.3.2. Reloj de control de tensión verAnteriormente se indicó que los motores de inducción se
rigen por la expresión general:
Ez=rt·..fi·Nz·f2·et>máx; ez= N2 ~~
donde Nz es el número de espiras por fase del rotor, <jJ es el flujomagnético en el entrehierro y Ez es el valor eficaz de la f.e.m.por fase del rotor. Para mantener el flujo constante se debe man-tener constante el producto e2·dt. El Cl. a utilizar satisfaceautomáticamente este requisito haciendo que la tensión de sali-da (Vout)sea directamente proporcional a la frecuencia de salida(fout)o lo que es lo mismo Vout/ fout=constante. El nivel de ten-sión media de salida, a una determinada frecuencia de salida, escontrolado por la entrada de reloj "VCT". Un aumento de "fver"reduce la profundidad de la modulación y por tanto la tensión(rms) de salida, mientras que una disminución de "fver" produ-ce el efecto contrario.
El reloj "VCT" determina pues la relación d=tensiónlfre-cuencia en el estator que deberá mantenerse constante. Dicharelación recobra especial importancia cuando se trabaja a bajasfrecuencias debido a que las pérdidas ''!-R'' en el devanado delestator a mentan, por lo que para compensarlas y aumentar elpar motor habrá que hacer que dicha relación sea d > 0,5 o loque es lo mismo habrá que disminuir fver; aunque todo ello seaa costa de que la componente fundamental de la tensión de sali-da deje de ser más o menos senoidal. Generalmente se sueleincrementar un 15 % de la tensión nominal. En la figura 5.14 semuestra la interrelación frecuencia-tensión.
La entrada de secuencia de fases "CW" se utiliza para con-trolar el sentido de giro del motor, variando la secuencia defases. En la tabla 5.3 se indica dicha secuencia según la entrada"CW" esté a nivel alto o bajo.
Tensión
Frecuencia
,,,,------------ ------------~ Tensión máxima V
.-.l I I 1N,,' I I
.••..••.. I I, ...•' I I
.... : I .~1 2 0),
Figura 5.14. Interrelación frecuencia tensión.
50Hz
V1,f1
100Hz
O,15V'N
A.B,C
A,C,BALTA
BAJA
TaIIIa 5.3. Variación de ~ de fases según el estado de ov. La frecuencia de salida "fout"con el 100 % de modulación, lacual se corresponde con una tensión máxima de salida sin dis-torsión viene dada por:
5.7.1.2.3. Entrada de datos X,Y YZ f j~'O,624' Vdout _
Las tres entradas X, Y Y Z se utilizan durante las pruebasde fabricación del integrado, por lo que no se van a utilizar
© ITP-PARANINFO

frecuenCia
de salid••lOullHzl
frecuenClil
desahddloullHll
Islmm}
'slmax)
90
90 100
80
110
7050
Is'"' ,,,llout
50
¡¡ Is = mi fout .Is = SO.30 = 1,5 KHz
40
al MARGEN DE VARIACION 0·50 HZ
30
bl MARGEN DE VARIACION 0-100 '-lZ
30 40506010
2010
10 20
2,5
0.25
1,5
0,5
0.75
1,25
120
0.5
hecuenciadeconmulac'ondel Inversor
1,IKHl)
f,lKHZ)
frecuencia deconmutación del
No lineal
...Y.l (Tensión media l.Vd normalizada I
O.S
donde fN es la frecuencia nominal del motor, Vd la tensión delpuente y VNom la tensión nominal del motor.
El valor de fver que corresponde a dicha frecuencia vale:
fVCT (N); 6720 I"U{ (1M; 1)
La relación fFdfver es importante en el diseño del sistema.Así para una modulación del 100 % (Índice de modulaciónIM= 1) tendrá un valor que viene determinado por:
j~er 3.360 . ¡!liT (Im)d=--= -0,5
fver 6.720 .J;!IIT (Im)
Tal y como se observa en la figura 5.15, para d< 0,5 la modu-lación resulta senoidal, mientras que por encima de 0,5 (d>0,5)la forma de onda de la tensión de salida se aproxima a una ondacuadrada. Se recomienda no sobrepasar un Índice de 2.
1M
Figura 5.15. Tensión media de salida en función de fFo/fvo'Figura 5.16. Frecuencia de conmutación del inversor en función de la fre·
cuencia de salida con el número de impulsos como parámetro.
5.7.1.3.3. Reloj de referencia RO
La señal "RCT" es una señal de reloj fija que se utiliza paradeterminar la frecuencia máxima de conmutación del inversor"fsCmax)". Las frecuencias "fRCT"y "f,(max)" están relaciona-das por la siguiente expresión:
j~CT; 280 'f; (máx) } 1,!,(rnín( 0,625 Idrnáx) m!;-¡
()u/
Ni que decir tiene que para la misma frecuencia de salida(fout) y una relación fFcJfvcrconstante, la componente funda-mental de la tensión de salida sería mucho más senoidal en elsegundo caso (fRCT= 560 KHz) ya que se trabaja con el doblede impulsos por ciclo.
dBQuasi cuadrada
-20
-40
O
dB
-20
nO de armónico
PWM de 15 impulsos
1357 1113 171921~2325el ; Portadora suprimida
dB
O
-20
-60
-40
040
·60 nO de armónico1 3" 5 7 1113 1719 23 25
al
-60 nO de armónico1357111315171921-2325
b)
PWM de 21 impulsos
Figura 5.17. Espectro de la tensión de fase del motor (armónicos).
donde mf es el número de impulsos por ciclo.
Estas ecuaciones son válidas siempre que:
0,043·fRer < fFer < 0,8·fRer y que fFdfRer < 0,5.
En la figura 5.16(a) se observa que para fRCT=280 KHz, lafrecuencia máxima de conmutación del inversor es:f (máx)=280 KHz1280= 1KHz. En este caso, con una fre-c~encia en el reloj de referencia fRCT= 280 KHz, si se deseaobtener a la salida una frecuencia de valor f
oUl=50 Hz
[fFCT=3360·50=168 KHz], se trabaja con una frecuencia deconmutación aproximada de valor f,=750 Hz que correspon-de a 15 impulsos por ciclo de trabajo. Con esta opción(fRCT= 280 KHz) se está en condiciones de variar la veloci-dad desde 4 Hz hasta 68 Hz, aproximadamente.
Si, por el contrario, lo que se quiere es variar la velocidad de3,55 Hz a 96 Hz, aproximadamente (el doble de su velocidadnominal) habrá que duplicar la frecuencia fRCT=560KHz (figu-ra 5.16(b)) por lo que ahora a una fOlll=50 Hz le corresponde otrafs=1,5 KHz. y 30 impulsos por ciclo de trabajo.
© ITP-PARANINFO

.Vd
CROWBAR ~
FILTRO
Todo sistema electrónico de potencia se puede dividir en dosgrandes bloques o circuitos constitutivos bien diferenciados: cir-cuitos de potencia y circuitos de mando o control. El primero deellos gobierna, generalmente, unos niveles de tensión y decorriente considerablemente elevados, mientras que el segundose encarga de realizar el control del primero para lograr en él losefectos eseados, con'igiéndolos en el caso de que no se ajustena las características deseadas. Por el contrario en los circuitos demando, se manejan niveles de tensión y de corriente reducidas,lo que propicia un manejo de los mismos en gran manera exen-to de peligros.
La figura 5.18 muestra un esquema general del sistema anivel de sus bloques constitutivos. Tal y como sucedía con elregulador de continua, la señal de referencia (V rcf) procedente dela etapa de temporización lineal, se suma con la señal de reali-mentación de velocidad (-e) obtenida del circuito acondiciona-dor de velocidad; en este caso como transductor de velocidad, seha optado por un encoder.
Será la señal de control (Vcontrol) obtenida a la salida del regu-lador de velocidad proporcional-integral la que controle la fre-
5.8. Diagrama de bloquesdel accionamiento
5.7.1.4.3. Salida de conmutación del inversor CSP
esta señal coincide con la de conmutación del inversor "fs" Yuna modulación igual a 6·foul'
Dicha señal es útil para el control en bucle cerrado de fvCT'sobre todo para conseguir una mejora en la linealidad entre ten-sión y frecuencia cuando la relación d=fFc-rlfvcT>0,5.
La salida "CSP" es un tren de impulsos con frecuencia doblea la frecuencia de conmutación del inversor (f). El frente debajada de cada impulso coincide con el punto de modulacióncero de las salidas principales. Cuando fFc-rlfvCT> 0,5, "CSP"representa la frecuencia teórica del inversor; sin embargo, debi-do a la desaparición de impulsos por la sobremodulación, la fre-cuencia real de conmutación será inferior. Esta salida no estáafectada por el estado de la entrada "L".
Figura 5.18. Diagrama de bloques del sistema.
+Vcc= + 12V
+Vl=+12V
+V2=+12V
+V3=+12V
+V4=+12V
+VS:;;+5V
KBKA3
*
2IfOCT
4/foCT
Anchura delImpulso.dIIparo (ma)
RECTIFICADOR
P1
FUENTE DEALIMENTACiÓN
KAI
Frecuencia.conmutación
"f." (KHz)
ALTA
BAJA
Entrada"KM
La señal "VAV" es una tensióndigital cuya forma de onda simulael valor medio esperado de la ten-sión entre fases en la salida delinversor. Sin embargo, excluye elefecto del retraso intercalado fijadopor las entradas "OCT" y "K" Yademás no depende del estado dela entrada "L". La frecuencia de
5.7.1.4.2. Simulación dela tensión mediade salida VAV
Esta salida entrega un impulso de frecuencia igual a "fout"
y de anchura idéntica al impulso del reloj "VCT". Está tem-porizada para que aparezca justoantes del cruce por cero en el pasoa positivo de la tensión de fase"R". Proporciona, por tanto, una 220V KA2
referencia estable para disparar unosci loscopio.
5.7.1.4.1. Sincronismo para osciloscopio
5.7.1.3.4. Reloj de retraso intercalado Da
5.7.1.4. Salidas de control
En la figura 5.17 se compara el espectro de frecuencias deuna forma de onda cuasi rectangular con el de una forma deonda PWM con mf = 15 Y 21 impulsos respectivamente. Dichoespectro de modulación, junto con la variación del número deimpulsos, produce pocas pérdidas en el motor y un arranquesuave. La relación entre la tensión de salida aplicada al motor yla frecuencia de salida es inherentemente lineal; pero si es nece-sario también es posible el control de la frecuencia y de la ten-sión por separado. La modulación en doble frente tiene la ven-taja de entregar el doble de impulsos por fase para unadeterminada frecuencia de conmutación, lo que da como resul-tado unos bajos valores de rizado de la corriente por el motor.
La entrada "OCT" en combinación con la entrada de datos"K", se utiliza para determinar el período de retraso intercaladoque es necesario cuando se produce el cambio entre las salidascomplementarias de cada fase.
En la tabla 5.4 se indica el funcionamiento de "OCT" y "K".Mientras sea posible, la entrada "K" deberá estar a nivel alto yaque ello reduce la inestabilidad producida por la falta de sincro-nismo entre "FCT' y "OCT'. Por economía de diseño, en lapráctica, se utiliza el mjsmo reloj para "RCT" que para "OCT".
© ITP-PARANINFO

cuencia de reloj "FCT" y, por tanto, la velocidad de giro delmotor. Asimismo se ha dotado al sistema de un circuito de mar-cha y paro, de un circuito de protección de sobrecolTientes y deun circuito de compensación ''f.R'' que permita aumentar la ten-sión de alimentación del motor a bajas frecuencias. El reguladorlleva incorporado también un tacómetro digital que permitevisualizar en cada momento la velocidad de giro del motor. Eneste caso no se ha incluido el bloque regulador de intensidad, porlo que en el supuesto de que el lector desee realizar una regula-ción de velocidad y de intensidad simultáneamente, deberáincorporar dicho bloque (PI) así como su acondicionador corres-pondiente (véase figura 5.37).
Por lo que respecta a los circuitos de potencia, además delpuente rectificador (monofásico) y del filtro, se ha colocado unaresistencia de carga para los condensadores del filtro (contactoKs) y otra de descarga (contacto KA3). El circuito "crowbar" consu resistencia de frenado, se encargará de mantener constante latensión del inversor (Vd) en los procesos regenerativos delmotor, cuando la carga se ve arrastrada por el motor.
La fuente de alimentación proporciona seis tipos de tensionesdiferentes que van desde una alimentación simétrica de ± l2Vpara los circuitos de mando y control, pasando por las cuatro ali-mentaciones flotantes del inversor (V l' V2' V3 Y V4) Y finali-zando con la alimentación V5 (Tacómetro-TIL). El lector debesaber que este bloque no es objetivo fundamental del tema,motivo por el cual no ha sido desarrollado en detalle.
máxima de la carga (motor) de 2,SCV (1840W), se elegirá uncontactor de entrada KA de las siguientes características:
Contactor TELEMECANl QUE:- Tipo: LC I D 120.A6S- Ith=2SA; Ui=660 V.- Vbobina=220V.
La rectificación de la tensión alterna monofásica a un nivel decontinua se consigue mediante un puente rectificador cuyos dio-dos deben cumplir las siguientes características:
Tensión inversa de pico máxima: VRWM > 220·-{2 =311 V.
Suponiendo una intensidad máxima prevista, para una cargade 2,SCV, de SA (en condiciones normales de funcionamiento)y teniendo en cuenta el aumento de la corriente durante el arran-que del motor, así como la posibilidad de conectar otras cargasmayores, se optará por un puente rectificador de característicassobredimensionadas: FAGOR (IOlax=2SA).
Para reducir el rizado de la tensión continua y eliminar elmayor número de armónicos posibles, se coloca a la salida delpuente rectificador un filtro L-C, tal y como se muestra en lafigura 5.19.
El hecho de que la carga a conectar pueda variar, hace que loscálculos para obtener las características del filtro sean aproxi-mados. Por tanto, suponiendo un motor de 2,SCV (1840W) y unporcentaje de rizado r=3% con respecto a la tensión máxima, seobtiene:
311 =3.100J..lF2'50'52,56'18,6
La resistencia y el condensador vistos por el filtro serán:
V2• 2R = Olax=-.l!..L = 52 56 Q
p) 1840 '
V.náxC=---
2IR·ti Vd
ti Vd2 2'r' V .
r ~ 100· -- = ti V = Olax- 18 6 VVOláx d 100 '
En la práctica se colocarán tres condensadores en paralelo, detal forma que C=C1+C2+C3. El valor de la capacidad de dichoscondensadores podría ser de 1.000 J..lF(500 V).
En la figura 5.20 se muestra la forma de onda de la tensión desalida.
Generalmente, en los modernos equipos de regulación utili-zados hoy en día en la industria, la tensión de alimentación delrectificador (previo al inversor) se toma a partir de una redmonofásica de 220V, o bien trifásica de 220, 380 o 460V.
En el supuesto de que el sistema se alimente desde una redmonofásica de 220V de tensión de línea y para una potencia
5.9.1. Redificador + filtro
~ 5.9. Diseño y cálculo de losbloques constituyentes delcircuito de potencia _
C1=C2=C3=1.000 ¡.tF+Vd
R41M
KA3 VsusC1 C2 C3 R5
15KR2 VI270Q 01 P1(35W) BTV58 1K
OV
R1 150 Q (70W)
L 1,5 mH
e-IIIIIIII---------------~----------------------~
Io_:-~,220 V
_______________ J ~o
220 V
"bo:=[¿}JFUSIBLE KA1 PUENTE RECTIFICADOR 25 Ar----------------~
IIIIIII,,II
'KA2
~I,IIIL _
Figura 5.19. Rectificador y filtro.
© ITP-PARANINFO

j
OV
Dich de otra forma, si se fija el valor máximo de la tensiónVd en 360V aproximadamente, al sobrepasar dicho valor el cir-cuito de control debe actuar y Q, se pondrá en ON. Por el con-trario, cuando la tensión del bus de continua caiga por debajo desu valor nominal (306V), el transistor estará cortado (OFF).
Para tomar la referencia de la tensión del bus se coloca undivisor resistivo (R4 y Rs) de forma que si los valores de cambiodel comparador con histéresis se fijan, por ejemplo, en Vs=5,5V(Cuando Vd=360V) y Vs=4,5V (Cuando Vd=306V), el valor deRs se obtiene de la forma:
V V ·RVd R R BUS 4~15Kr.
BUS = ---' s = S H
R4+ Rs Vd- VBUS
En la práctica se colocará también, en serie, un potencióme-tro Pide ajuste.
En la figura 5.22 se muestra el circuito de control. Consta deun comparador con histéresis que ataca a una etapa en simetríacomplementaria. Ésta, a su vez, lo hará con el transistor Q,.
Figura 5.21. Resistencia de frenado (crowbar).
En la práctica se podrá R2=270 n (35W).
+Vd
La acción del crowbar consiste en el consumo de energíasobrante. En este caso, la energía a consumir es la posibleenergía cinética del motor en los ciclos regenerativos de frenado(generador), la cual se transforma en un incremento de potencialen el BUS de continua que puede poner en peligro los dispositi-vos semiconductores que forman parte activa del convertidor defrecuencia (inversor).
Esta energía devuelta por el motor se consume, por efectoJoule, mediante un circuito formado por una resistencia R) deelevada potencia y un semiconductor Q1 trabajando en con-mutación. Este último está gobernado por un circuito de con-trol que vigila en todo momento la tensión del bus de continua(figura 5.21). Además, al circuito de control se le proporcionauna histéresis para que el cambio de un estado a otro(ON-OFF) del transistor se produzca en el momento adecuado.
5.9.2. Resistencia de frenado(crowbar)
tt = 5 . 't = 5 .R .e = R = descarga = 266 Qdescarga 2 2 5 .e
La potencia a disipar por dicha resistencia será máximadurante la descarga y valdrá:
tcar¡'~1(80%)
306110-4.5.2.50 '" 1,4 mH
P = __ E _I t
wrga(80%)
VdIIOA'/dc'2j
L=
tt =4·'t=4·R·e = R - carga (80%) - 166Qcarga (80%) I I 4. e
Por otra parte, la potencia que debe disipar dicha resistenciadurante la carga de los condensadores es:
I 2-·e,vd
2 ~ 70 W
El valor medio de la tensión de salida Vd se obtiene de laforma:
Por su parte, el valor de la autoinducción para una corrientemedia Idc=5A, será:
Figura 5.20. Forma de onda de la tensión de salida del circuitorectificador +filtro.
Puesto que la potencia que disipa la resistencia en el momen-to de la carga (puesta en marcha) es considerable, en la prácticase colocará una resistencia de 150 n y 70W.
Por el contrario, cuando se desconecta el sistema de la red(KA desactivado), los condensadores del filtro comienzan a des-cargarse. Para facilitar dicha descarga se coloca, al igual quesucedía en la carga, una resistencia R2 que entre en funciona-miento una vez que se pare el sistema (figura 5.19).
Suponiendo ahora un tiempo de descarga de cuatro segundos:
Este tipo de filtro posee la ventaja adicional de que los dio-dos del puente conducen continuamente, lo cual reduce susnecesidades de corriente directa de pico. En la práctica sepondrá L= 1,5mH, con lo cual se asegura dicha conducción.
Con el fin de que los condensadores C" C2 y C) no se car-guen instantáneamente en el momento de activarse el contactorKA (se activa a través del circuito de marcha-paro), se coloca enserie una resistencia R1 encargada de limitar la corriente que cir-cula por los diodos en los instantes iniciales.
Cuando la tensión de carga sobrepasa, aproximadamente, el80 % de su valor nominal, una señal de control proveniente delcircuito de marcha-paro, a través de Kb, activará el contactorKs' cortocircuitando la resistencia R1•
Si se tiene en cuenta que el circuito generador de impulsosPWM (HEF 4752) tiene un tiempo de iniciación de tres segun-dos aproximadamente, el tiempo que los condensadores necesi-tan para alcanzar el 80 % de la tensión nominal debe ser inferioral primero. Dicho esto, el valor de R1, suponiendo un tiempo decarga (al 80 %) de dos segundos, será:
© ITP-PARANlNFO

Figura 5.22. Circuito de control.
BUS DE CONTINUA +Vd
R41M
R3 VBUSlK5(90W) C2 C3 R5
Cl 15K
PllK
OV
Suponiendo una intensidad media por el transistor de 0,25 A,el valor de la resistencia será:
P3~ Icc' Vdllláx= 0,25 ·360= 90WP, 90
R3=-' --= 1.440 Q
/z.c 0,252
En la práctica R,= 1.500 (90W).
+V4=+12 V
A continuación se realizará el análisis del circuito compara-dor fijando una tensión de referencia "U1"de 2,5Y (LM335). SucaracteJÍstica de transferencia será la indicada en la figura 5.23.
-=:)1DA+
L..- ...•• ---'--+ ....•_ •.. V BUS
Vs VB
Figura 5.23. Característica de transferencia del comparador regenerativo.
Cuando Y1=+Y.¡=12Y Y la tensión YBUSaumente. el circuitoconmutará cuando Y1+=Y 1-=YBUS=yB=5,5Y.
Cuando Y I=OYY la tensión YBUSdisminuye, el circuito con-mutará cuando YI+=YI-=YBus=Ys=4,5Y.
De cualquiera de las ecuaciones, fijando R7= lOKQ, se obtie-ne R8=110 KQ.
En cuanto a lo que se refiere a la resistencia de frenado R3,
ésta debe disipar durante cortos períodos de tiempo (régimentransitorio) una cierta potencia. Debido a que el sistema estáideado para diferentes tipos de cargas (motores), el cálculo dedicha resistencia se hará en las condiciones más desfavorables.
El transistor Q1 encargado de cortocircuitar (ON) el puenteserá el BTY58 (par darlington) cuyas caracteJÍsticas más impor-tantes son:YCEllláx=I.OOOY; Icllláx=7A.
5.10. Convertidor puente trifásicoParece obvio pensar que el inversor trifásico estará alimenta-
do por el bus de continua obtenido mediante el rectificador y elfiltro a partir de la red. A este circuito se le encomendará la tareade obtener un juego de tensiones trifá icas de frecuencia varia-ble, según el requelimiento del control.
Los MOSFET y los IGBT presentan grandes ventajas sobrelos tiristores o los transistores bipolares de potencia a la hora deconstruir un inversor, pues permiten controlar grandes poten-cias, con una baja distorsión de salida, gran capacidad de sobre-carga y una respuesta rápida.
En la figura 5.24 se muestra un inversor trifásico en el que elelemento de potencia (MOSFET o IGBT) se ha sustituido porun "switch" (interruptor) que representa un elemento capaz deconducir corriente en ambos sentidos y bloquear tensión sólo enuno. A él se le ha conectado un motor trifásico en jaula de ardi-lla y sobre el cual se van a basar las explicaciones posteriores.Para facilitar tales explicaciones, se considerarán como corrien-tes positivas aquéllas que entran hacia el motor y negativas lasque salen (flechas de trazos).
OB+/"l OC~+ +VdDB+ ¡J ~ DC+
, iC
OA~)¡ ~ - OB~/ :~ QO
O
) ·t~ (rtW"...M~Q"
:.;¡¡¡I¡;: DA· NTDB· 1 T DC· \(j:V 3-
~---- L-OV
Figura 5.24. Convertidor puente trifásico.
© ITP-PARANlNFO

Dada la complejidad de funcionamiento de este circuito, sesupondrá que las señales de disparo de los seis elementos delpuente son las mostradas en la figura 5.25. Con el motor comocarga esencialmente inductiva, la corriente por la fase A (iA)estáformada por curvas exponenciales crecientes y decrecientes. Asíen el instante "to", el transistor QA- se bloquea mientras que eltransistor QA+ se pone a conducir. En el instante "S", este últi-mo transistor (QA+) se pone al corte y aunque al transistor QA-se le ha dado la orden de conducir, como la corriente que en esemomento circula por la carga no puede cambiar instantánea-mente (positiva), será ahora el diodo DA-el que pase a conduciry no el transistor. Una vez que la corriente pasa a ser negativa sepondrá a conducir el transistor en cuestión (QA-)hasta el instan-te ''ts'' en que se pone al corte, momento en el cual pasará a con-ducir el diodo DA+ ya que la corriente es ahora negativa.
De la misma forma que se ha analizado una rama del puente(rama A) durante un ciclo completo de la corriente de fase (iA),se pueden analizar las otras dos restantes.
Las ecuaciones que rigen el comportamiento del convertidor,llamando R y L a la resistencia y autoinducción de cada uno delos bobinados del motor son:
Si estas tensiones se expresan en función de otras, existentesen el circuito, se obtiene:
2 lVAI/="3' VAN- 3' (V8A - VCN)
2 lV81/="3' V8N- 3' (VAN- VCN)
2 lVc" = "3 . VeN - 3' (VAN - V8N)
El voltaje instantáneo de línea a línea (VAB)de la figura 5.25se puede expresar en serie de Fourier, admitiendo que VABestádesplazada en 1[/6 y los armónicos pares son cero.
~ 4'VI (j'TI) [( TI)]VAlJ== L ~.cos -6- 'sen j' w ·tl"6} 1,3,5... }
Los voltajes VBCy VCApueden determinarse a partir de laecuación anterior mediante el desplazamiento de fase de VABen120 o y 240 o, respectivamente.
VBC=j)1j. :·.~d.COS (j~T[) .sen[j.( w ·t- ;)]
VAc=j_Hs ~·.~d,COS( j~T[) 'sen[j.( w.t __7_~TI_)]De las tres ecuaciones anteriores se deduce que, en los volta-
jes línea a línea, los armónicos múltiplos de tres (j=3,9,15 ...) soncero. El voltaje (rms) línea a línea "V LL" se puede determinar apartir de:
tO. tl 12 13 14 .5
2rú3
2.J V 2 d(w·t)2 dT[ o
VBn
2/3Vd
1/3Vd
-1/3Vd-2/3Vd
VAB
+Vd
,\,
·Vd
Figura 5.25. Formas de onda en el convertidor puente trifásico.
© ITP-PARANINFO
De la primera ecuación, la jotaésima componente "mls" delvoltaje de línea es:
VLLj
=_4_._V_d_.COS(_jT[_)j'T['-f2 6
Para j= I se obtiene:
Finalmente, el valor "rms" de los voltajes de línea a neutro,se pueden calcular a partir del voltaje de línea:
VIL'2V =V =V =_-_=_v_"·V ~0471'VA" 8" c" vJ 3 d' d
Para el caso que nos ocupa (carga conectada en estrella), lacorriente de línea "iA" para una carga R-L viene dada por:
donde:
(w, L)
<Pj=tag -1 j. -R-

5.12. Pérdidas durantela recuperación deldiodo inverso
VdVAN (máx)= 1M' 2
Por tanto, el voltaje eficaz (rms) de la componente funda-mental, con un desfase de 120 o entre fases, para IM<1, será dela forma:
VLLI (rms) = {J .[VAN(máx)1 =~'I M' Vd~ O,612'IM' Vd{I 2'{I
Tomando como referencia la rama A, suponiendo que el tran-sistor QA' deja de conducir, ello implica que la corriente que cir-cula por la carga (iA) será negativa. Si QA' deja de conducir,como quiera que la corriente iA no puede variar instantánea-mente (carga inductiva) se pondrá a conducir el diodo inversoDA+ (hasta que dicha corriente pase por cero) como consecuen-cia de haber disparado el elemento superior de la rama.
Al inicio de cada ciclo de conmutación (impulso de disparo),la corriente de la carga circula a través del diodo inverso del ele-mento de potencia en cuestión (MOSFET, IGBT, etc.) que iniciala conducción. Antes de que el diodo pueda soportar una tensióninversa, cierta cantidad de carga debe ser extraída. A medida quela carga es extraída, la tensión en el punto medio del puente (A,B o C) bascula desde +Vd a Vos (sat), con una cierta pendienteque va a depender principalmente de las características del cir-cuito de puerta (RG y CGo) del elemento de potencia. La cargatotal asociada a la recuperación del diodo inverso, circula haciael bus de continua sin hacer trabajo útil. La corriente de recupe-ración del diodo (Irr) supone por tanto una pérdida de energíaque ha de disiparse en el radiador del elemento en cuestión y enel propio diodo inverso.
En la figura 5.28 se muestra la variación de la corriente derecuperación con la corriente de carga por una rama del inver-sor. En ella se pueden observar las fomlas de onda de tensión(Vos) y de corriente (iD)durante el paso a conducción de uno delos dos MOSFET de una rama.
El valor de la componente fundamental de una de las señalesdel inversor será:
·'·--';~·;---·------··--·--··+--·--··--.l.tCondu~n: uA-(ÓB+.OC+
-+------¡.. Conducen: QA-,OB-,OC-
Figura 5.27. Formas de onda de tensión y corriente en las ramasde un motor trifásico.
VCN
VAN
5.11. Formas de onda en bornesde un motor de inducciónpor RW.M.
Figura 5.26. Formas de onda (PWM)en diferentes puntos del puente inversor.
VAN
VAB=VAN-VBN
• iA< O(VAN= O)=>QA'(ON)• iB< O(VBN= O)=>QB' (ON)• ic> O(VCN= O)=>Dc' (ON)
VBN
Las señales de disparo son señales moduladas en anchura deimpulso de manera que las tensiones VAN'VBNYVCNcoincidencon las señales de disparo de los transistores QA+, QB + y Qc+. Enla figura 5.26 se representan las señales VAN'VBNYVAB dondese aprecia cómo esta última tensión (VAB)' se conforma comoconsecuencia de restar las dos anteriores (VAB=VAN-VBN)'
En lo referente a las señales de corriente por las tres fases dela carga, se puede comprobar según la figura 5.27 cuáles son loselementos de potencia que están conduciendo en un instantedeterminado, así como el ángulo de desfase (factor de potencia)entre la tensión y la corriente por cada rama. Por ejemplo, si seanaliza el intervalo en el que QA', QB' y Dc' están conduciendo,sucede que:
© ITp·PARANlNFO

"t
+Vd
~QI-c:I
+Vd IE
DA+ i.iA :a-A
~
j~QI-c:I
av c:Período "t1" :52
~+Vd t
OA+DA+ jDA-
av
Período "t3"av
I I
lit 1 ~ :to I,{ t2 I t3
"1" "1"OA+ ~ I OA+ ,OA+ I OA+
DA+ 1 • 1I III
Vth
DA+
DA-
iA
+Vd
VDS (QA-)
+Vd
Período "t2"
Figura 5.30. Formas de onda de tensión y corriente(con la induclancia del circuito).
VDS (QA+)
OA+
Figura 5.29. Diferentes situaciones en los transistores de una ramadurante el proceso de conmutación.
• Período tI: el transistor QA+ se pone en ON (QA- en OFF),la corriente "iA" sigue siendo negativa aunque va decre-ciendo y el diodo DA + está en conducción.
VGS (QA+)
Asimismo, en la figura 5.30 se indican las distintas formas deonda de tensión y de corriente, considerando el efecto de lainductancia del circuito (motor). En ella se pueden diferenciarcuatro períodos:
• Período to: la corriente es negativa y el transistor QA- estáen conducción, mientras que la tensión VDS (QA-) será lade saturación del propio transistor.
~ t
DA-
av
Período "tO"VDSsat
~ t +Vd
OA+DA+
di
VDS
iD
VDS
~ t
~t
O" = 4 C1" = 25A
¡VDSsat
: • t iDIRG=1211
a)
el
Figura 5.28. Variación de la corriente de recuperación conla corriente de carga.
iD
iD
VDS
VDS
En la figura 5.29 se representan las cuatro situaciones quetienen lugar durante el proceso de conmutación de los transisto-res de una rama del puente (QA + y QA-) así como el sentido dela corriente "iA" que circula por dicha rama.
Por último, decir que la carga de recuperación del diodo(QRR)' disminuye a medida que se incrementa el tiempo derecuperación, debido al incremento de la recombinación deportadores minoritarios. Además, QRR también aumenta conla temperatura, pero no de forma significativa.
5.13. Análisis del procesode conmutación de loselementos de potenciaen una rama del inversor
Una vez que la corriente pasa por cero, ésta cambiará desentido ya que es ahora QA + el que conduce. A la corrienteque circula por el transistor QA + se le debe sumar, durante esteintervalo de tiempo, la corriente inversa de recuperación deldiodo DA-, que al dejar de conducir entra en su zona inversa.Pasado este tiempo de recuperación (t,,), la corriente se esta-biliza de nuevo puesto que ésta se debe únicamente a la con-ducción de QA +.
En la figura 5.28 (c) y (d) se puede comprobar también elefecto de la velocidad de conmutación del MOSFET y de lacorriente inversa del diodo. Se observa como, a medida que lavelocidad de conmutación del elemento es más lenta, lacorriente de recuperación del diodo (lrr) disminuye también.Para variar la pendiente de la corriente de recuperación y conello la velocidad de conmutación, se deberá colocar una resis-tencia de puerta (RG) adecuada a las características de puertadel elemento de potencia. Un valor inadecuado de tal resis-tencia puede afectar gravemente al funcionamiento del siste-ma, provocando grandes consumos de corriente incluso con elmotor en vacío.
© ITP-PARANlNFO

5.15. Aislamiento de la señalde control. Circuito excitador
El MOSFET a utilizar se elige tomando como base sus carac-terísticas más imponantes tanto de tensión como de corriente.En este caso se ha optado por ellRF 350, pero podría haber sidoperfectamente otro elemento de características superiores.
{2·1840.1.2 9,64A187·{3
~.p11/11 • 1.2 - 3.06 A
. {2'P'¡/I// \(llláX)------·1.2
VLU(rm.,)·-{3
1,\ (11I('(/io)
Las seis señales de disparo de los transistores del puente pro-cedentes del generador de impulsos PWM (HEF 4752) deberánir aisladas eléctricamente pues, de lo contrario, se estaría produ-ciendo un cortocircuito entre cada una de las salidas (A. B y C)y el terminal negativo del bus (OY). Para aislar la señal de dis-paro se han utilizado seis optoacopladores de elevada inmunidada transitorios de elevado dY/dt en modo común (CMRR) entreel circuito generador de impulsos y el circuito excitador de puer-ta. Tal y como se muestra en la figura 5.31, para la alimentacióndel circuito de excitación, será necesario la utilización de cua-tro alimentaciones flotantes. Las tres primeras (Y l' Y2 Y Y3) ali-mentarán a los circuitos de disparo de los tres transistores supe-riores de cada rama (QA+, QB+ Y Qc+), mientras que laalimentación de los tres transistores inferiores (QA-' QB- y Qc-)correrá a cargo de la tensión Y4' ya que los tres circuitos de dis-paro tienen un mismo punto en común (OY).
Lógicamente, si lo que se pretende es aumentar el valor eficazde la salida a costa de aumentar el contenido en armónicos, habráque aumentar la tensión del bus de continua (Yd) o el índice demodulación (1M >1). Por su pane la corriente máxima por fase delmotor, vendrá determinada por la cOITientemáxima requerida poréste. El inversor debe estar dimensionado para esta corriente y nopara la nominal del motor, por lo que el valor máximo y mediode esta corriente, concediendo un 20% por armónicos, será:
• Período t2: la cOITiente ahora se hace positiva por lo queel transistor QA + se pone a conducir, mientras que el diodoDA+ entra en su zona inversa. La corriente que circulaahora por la rama será la suma de la que circula por el tran-sistor más la corriente inversa de recuperación del diodo.
• Período t3: el diodo DA + ha dejado de conducir y la únicacorriente que circula por el transistor se debe a QA +. Latensión YDS (QA +) ha caído hasta su valor de saturación yla corriente iA se estabiliza.
-J3 {3VLLI(.)~~·VAN .' ~ __ 'IM'V/~0,612'IM'V/~ 187V/111_\ -vL nldX! 2· --f2 ( {
5.14. Diseño y cálculo del inversortrifásico con MOSFET
El método de diseño que se describe a continuación seadapta a una amplia gama de motores trifásicos, aunque loscálculos se han hecho con alTeglo a un motor de 2,5 CY(1480 W) y 220 Y. La tensión de salida no debe suponerningún problema ya que la mayoría de los motores están pre-parados para aceptar 220 Y eficaces de tensión de línea conlos devanados en triángulo.
La máxima tensión que el inversor puede proporcionar almotor está determinada por la tensión de la red que lo alimenta,que en este caso será (por comodidad) de 311 Y.
Puesto que el equipo se va a alimentar a panir de una redmonofásica, la tensión continua media será:
,··Vllláx 3·311
100 100V,F Vllláx- --2-= 311 - -2--= 306 V
Esto permite una tensión eficaz de salida, para un Índice demodulación 1M< I,de valor:
VV . ~I .~dANlllax, M 2
CIRCUITO EXCITADOR
..
IRr3S0
OB'
0'2 OV,
-l. -K:(U) (,) (w)
'DOO ll~n50 IRFl50
OB- oc-
1
Figura 5.31. Aislamiento de la señal de control. Circuito excitador.
© ITP-PARANlNFO

Durante el estado alto de la señal de entrada (PWM OAM 1)el transistor Q1 se satura, lo cual hace que el transistor internodel "optoacoplador" también se sature y Q~ se ponga al calle.Como consecuencia de ello, Q3 estará saturado al igual que Qsy el impulso positivo pasará a la puella del transistor de poten-cia. Por el contrario, durante el estado bajo de la señal de entra-da, Q2 se saturará al igual que Q4 y Q6, y el transistor de poten-cia, por tanto, se pondrá al corte.
Los niveles de tensión de puerta para el transistor elegido,son los siguientes:
• Tensión que garantiza la conducción plena (8V).• Tensión máxima en la puerta (±20V).• Tensión umbral (4V).
Por tanto, el circuito de disparo debe garantizar los siguientesniveles de tensión puerta-surtidor:
-20V <v Gs(OFF)<4 V8V<VGs(ON)<20V
donde VGs(OFF) es la tensión de puerta SUl1idorque garantizael bloqueo del canal y VGs(ON) la que garantiza la plena con-ducción. La etapa en simetría complementaria fonnada por Q2 yQ3 o Qs y Q6 asegura la corriente y tensión necesarias para pro-vocar la excitación y el bloqueo de los transistores de potencia.
Una vez conocidas las características principales del motor acontrolar, la tensión del bus de continua (Vct) y los elementos depotencia a utilizar, parece obvio pensar que estos últimosdeberán ir provistos de sendos radiadores que permitan disiparlas pérdidas de potencia que tendrán lugar, sobre todo en con-ducción.
de tal forma que una vez que se ha actuado sobre el pulsador demarcha (M), en la base del transistor QI habrá un "uno lógico",el transistor se saturará y el LEO DI se encenderá (sistema enfuncionamiento). En estado de reposo (motor parado) será eldiodo O2 el que permanezca encendido, al igual que cuando separa el motor como consecuencia de haber actuado sobre el pul-sador de paro (P).
En el momento en que se pulsa M (QI saturado), a u'avés dela red diferenciadora formada por R11 y C4 se tija la "puesta acero" del generador de impulsos (HEF 4752) por su entrada"X". De igual forma, la saturación de QI hace que CI se carguey, por tanto, alimente al bloque "U~", con lo cual el "uno lógi-co" existente en la base de QI aparecerá en la salida de este blo-que transculTido un tiempo que viene determinado por R6 y C2.
Como consecuencia de este nivel a la salida de U2 ' Q2 se satu-ra y por tanto el relé "Ka" se activa. Recuérdese que el relé (K)será el encargado de activar a su vez al contactar "KA" paraentregar la tensión de la red al bus de continua.
La red integradora formada por R7 y C3 se encarga de produ-cir un nuevo retardo en el encendido del LEO OJ, o lo que es lomismo un "uno lógico" en la entrada "L" (E ABLE) del Cl.HEF 4752. Una vez que está el motor en marcha, si se pulsa denuevo el pulsador M, debido a que Q2 se encuenU'a saturado, ala salida de UJA habrá un "cero lógico" y el biestable R-S nosufrirá variación alguna.
El bloque "U6" funciona como un monoestable con salidanormalmente baja. Por tanto, al pulsar M, la entrada del mono-estable (pin 2) se pone a cero, con lo cual la salida del mismo(pin 3) durante un tiempo "tea" se pondrá a nivel alto.
El cálculo de tea y la tensión de emisor del transistor Q3 seráde la forma:
5.16. Circuito de marcha-paroEste circuito será el que se encargue de fijar las condiciones
iniciales de puesta en marcha del sistema, así como de parar elmismo en el momento deseado y dejarlo en condiciones de serpuesto de nuevo en funcionamiento (figura 5.32).
El bloque "U 1" está formado por dos biestables R-S (cambiopor nivel) construidos a partir de puel1as NAND con histéresis,
donde <:X.:z·P2es la parte útil del potenciómetro P2.
El hecho de que la salida de este circuito se encuentre a nivelalto durante unos pocos segundos (te) hace que el transistor Q4
- ~lN4007 • 12V
.A13 O 15K • 280n \
+12V
05, c=J- o:6. - -6K8 • Kb
RI6
~04
4K7(se 5478)
R15 R17lOOK 10K
--C4 06
X (HEF 4752)
150 nF
e2 100nF
I U2 40106e7 100nF
Rwt1CII47"'
¡éh !) l .ut:8
01-- U~~~_3. ~_tt!~
~ Kal R4; __ J_U14093 ~~U3A U3B :
12V I 01 liD .o --, I
280l! {BC547B) -¡~ D . RI L_ - ----- ----1- _JR3 -..... U1A 6K833K R9 6K8
I --r UIC"::J~'O' p
I 1~~O+0=¡(J a ~ R2o-~+12V
021; _ 6K8
•.. ---------------------- --------,,
Figura 5.32. Circuito de marcha-paro.
© ITP-PARANlNFO

~ 1
~ 1
~ 1
~ 1
-1
1513 1412
II II I
-----l- -------+--II
1110
cw
Vx
VN
Figura 5.34. Funcionamiento del circuito de temporización lineal.
Vref
referencia "Yre/' que puede variar entre ±IOY, según el motorgire en un sentido u otro (figura 5.33).
Por su parte, la señal de velocidad "V N" se obtiene a partirde Yref' a través de un comparador "U2A" y un circuito inte-grador"U3", de forma que: YN= -KI·I yrefl. Una variación enescalón de Yref dará como resultado un aumento o disminu-ción lineal de la señal de salida VN' la cual tomará siemprevalores negativos. La rapidez de la variación de YNpuede serajustada mediante P2 y P3.
El funcionamiento del circuito es el siguiente (figura 5.34):En el instante "to" la señal de marcha "L" (ENABLE) se encuen-tra a nivel bajo, Vrefes negativa y Cw está a nivel alto. Los inte-rruptores SI y S2 (activos con entrada a nivel bajo) estarán, portanto, abiertos y no suministrarán señal de referencia al compa-rador U2A"Por su parte, el interruptor S3 (L a nivel bajo) seencontrará cerrado y, por tanto, el condensador C4 cortocircuita-do (VN=OY).
En el instante "t¡" la señal de marcha L pasa a nivel alto(1 lógico), Cw continua a nivel alto, por lo que el interruptor SI
L(ENABLE)
5.17. Circuito de temporizaciónlineal: referenCia develocidad
se sature durante ese período, con lo cual se activará también elrelé "Kb". Dicho relé es el encargado de accionar el contactor"KB" situado en el bus de continua al objeto de que los conden-sadores (filtro) se carguen a través de una resistencia limitadorade la corriente de carga [RI=150 Q (70W)).
Por último, el bloque "Us" es un comparador que se colocacon el fin de que el motor no funcione para aquellos valores dela tensión de referencia [VFcr=f(Y ref)]próximos a cero. De estaforma se evita que el motor se ponga en marcha para valoresmuy pequeños de la tensión de referencia intercalando así unazona muerta, tanto en un sentido de giro como en otro.
La señal "Y Hall" procede del circuito de protección contrasobrecorrientes y es activa a nivel bajo. Las puertas U4C y U2Eforman una puerta AND, con el fin de que el motor se pare(L=O), bien porque se ha dado una orden de paro (P activado), obien porque se ha sobrepasado ellímüe de corriente de fase esta-blecido.
La rapidez con la que se puede variar la velocidad de unmotor viene limitada por la inercia del propio motor y su carga,así como por el par motor disponible. Como la frecuencia delmotor es alterada, existe un retraso inevitable en la respuesta delmotor, que da como resultado un aumento del deslizamiento.
Si no existe limitación alguna en la rapidez bajo la cual lafrecuencia del estator puede variar, un aumento del desliza-miento puede hacer que se exceda del par máximo y se blo-quee el motor. El circuito de referencia de velocidad propor-ciona, además de la variación de la velocidad en ambossentidos, el control en la rapidez de respuesta ante un posibleaumento (aceleración) o disminución (deceleración) de la fre-cuencia del estatoL
La velocidad del motor es determinada por la posición delpotenciómetro PI' mediante el cual se selecciona una tensión de
el 10nf
+ 121/
-121/
II
U6 4093 III
IL ~
VN
-121/
CW (H[C4752)
L (H[C4752)
Figura 5.33. Circuito de temporización lineal. Referencia de la velocidad.
© ITP-PARANlNFO

Figura 5.35. Regulador develocidad proporcional.integral
(PI).
V'CT[Vcontrol)
b)
R1
a)R2
En el supuesto de que se pretenda realizar una regulación enlazo abierto (sin realimentación -ey), y dado que la tensión deentrada del convertidor tensión-frecuencia (FCT) debe ser siem-pre positiva y que VN<O, será necesario intercalar una etapainversora con amplificador operacional (figura 5.35.b).
Debido a que este bloque (figura 5.35.a) es similar al utiliza-do en la regulación de C.C., se obviará el estudio del mismo pues-to que ya se realizó en el tema 4. Ni que decir tiene que varian-do el valor de C y de P J se varían las constantes de tiempo delregulador.
Por otra parte, si se desea realizar una regulación de veloci-dad y de intensidad simultáneamente, será necesario incorporarun bloque acondicionador de señal así como el regulador deintensidad (PI), tal y como se muestra en la figura 5.36.
5.18. Regulador de velocidadproporcional-integral
v, REGULADOR DE REGULADOR DE0- VELOCIDAD INTENSIDAD .-. Vcontrol
'v PI PI';
O O ACONDICIONADORDE INTENSIDAD CIRCUITO DE PROTECCiÓN
O O DE SOBRECORRIENTES ¡rol
ACONDICIONADORO O O DE VELOCIDAD ENCODER (1,1
OFigura 5.36. Regulador de intensidad.
O
d VN = VX R1 Pl 100K eE=VN
dt C4'(Rg+ RJO) 10K
R2
siendo: V =V2- Vy 'Rg CJ.3P3 la porción útil de P3.
-ev 'y 10K V'CT[Vcontrol)X
Cl.3·P3+Rg 741
permanecerá abierto, S2 se cerrará y S3 se abrirá. De esta formala tensión de referencia (negativa) se transfiere a la entrada noinversora del comparador U2A. La salida V2 será positiva (02conduce) y el circuito integrador U3 evolucionará hacia valoresnegativos hasta que VN=Vref,momento en el cual la salida deU2Avaldrá cero, pues V2=K2·(VN-Vref)'donde "~" depende delvalor de R6 y R7. La pendiente de la tensión de salida del inte-grador vendrá determinada por la tensión Vx' las resistencias Rg
y RIO y el condensador C4, de forma que:
En este momento tanto V4 como Vs están a nivel bajo(-VCC) lo cual implica que la salida Cw no va a cambiar deestado (nivel alto). En el instante "S" la Vref aumenta y VNavanza hacia valores más negativos, mientras que Cw perma-nece inalterable.
Durante el intervalo "t3" la señal de referencia toma valo-res positivos, la salida del comparador U2A pasa a la satura-ción negativa (-Vcc), la tensión Vx también será negativa y elintegrador U3 evolucionará ahora hacia valores positivos locual implica una deceleración del motor. El cambio de signode Vref supone que la salida del comparador formado por U4Ase ponga a nivel bajo (V4=OV), al igual que la salida del otrocomparador U4B (Vs=OV). Como consecuencia de ello, laseñal de cambio de giro del motor (Cw) pasará a nivel bajo yel motor comenzará a girar en sentido contrario.
Una vez que Cw cambia de estado, será ahora el interruptorSJ el que permanezca cerrado (SJ=Ü lógico) y S2 abierto (véasetabla 5.5). A partir de aquí se repite el mismo proceso descritoanteriormente ya que la señal de referencia pasará invertida (U 1)a través de S I al comparador U2A' motivo por el cual VNsiem-pre toma valores negativos.
En "ts", V,era' la salida de U2A pasa a ser negativa y VNasciende en rampa hasta cero, llegando a parar el motor.
5.19. Circuito de compensaciónde "I·R"
En los sistemas de accionamiento por variación de frecuen-cia, el motor arranca con una frecuencia baja y es llevado a lavelocidad de funcionamiento deseada con un progresivo aumen-to de la frecuencia y una tensión proporcional a ella. De esta
© ITP-PARANlNFO

Conviene recordar que en el supuesto de que VPI > Iv NI, latensión de salida VB evolucionará de la forma:
En este caso, la tensión nominal entregada al motor depen-derá de VP), mientras que si DI conduce dependerá de la sumade ambas (VP)+VA)' De aquí se deduce que para pequeñosvalores de V (pequeñas velocidades de giro), VVCT=f(VN);mientras que para valores superiores a VPI la salida dependesolamente de VP).
Por último, se debe evitar que VPI>VP3' pues ello supon-dría que para determinados valores de V'N la salida (V VCT)fuese negativa, con lo cual el sistema no funcionaría.
5.20. Circuito generadorde impulsos PWM---~~~~~~---
Una variación de la frecuencia del estatal' da lugar a uncambio de la velocidad síncrona del motor. En condicionesnormales de funcionamiento, la velocidad del rotar es sola-mente un pequeño porcentaje inferior a la velocidad síncro-na, lo cual proporciona un método para poder variar gradual-mente la velocidad. Para que se mantenga el par a plenacarga, el flujo en el entrehierro debe ser constante, lo cualexige que la tensión aplicada varíe linealmente con la fre-cuencia de entrada.
5.20.1. Señal de reloj "FCT"
Tal y como se ha podido comprobar en apartados anterio-res, las salidas de las tres fases del inversor (A, B Y C) con-sisten en impulsos de anchura variable equivalentes a laamplitud de una senoide según la frecuencia portadora deter-minada, lo cual produce en el motor unas corrientes seno ida-les con bajo contenido armónico. La forma de onda de salidadel inversor viene determinada por la posición de los impul-sos de disparo generados por el el. HEF 4752 que es elcorazón del sistema, mientras que la sección analógica decontrol efectúa los cambios en el funcionamiento del motor,variando únicamente las entradas del circuito integrado.
El funcionamiento del integrado viene principalmentedeterminado por las señales digitales "L" y "Cw" que contro-lan la puesta en marcha del motor y el sentido de giro respec-tivamente y las cuatro entradas de reloj: FCT, VCT, RCT yOCT (figura 5.39).
Las entradas FCT y VCT están determinadas por sendososciladores controlados por tensión (VCO) de amplio margende frecuencia, mientras que las otras dos entradas (RCT yOCT) son fijas.
Este reloj determina la frecuencia del estatal' (fl), controlan-do, por tanto, la velocidad del motor. Para la obtención de dichafrecuencia (fFCT)se ha optado por un oscilador controlado portensión "U)" cuya frecuencia de oscilación viene dada por lasiguiente expresión:
P4 ~UK
c--C:? .
•. fout
•. fout
•. fout
33"2='\-,,,F
R6 R7
Pendiente controlada por P3
Pendiente controlada por P2
Pendiente controlada por P1
Figura 5.38. Compensación de "I·R",
eVl •
Figura 5.37. Circuito de compensación de "I·R",
forma pueden evitarse las elevadas corrientes y el bajo factor depotencia asociados al arranque con frecuencia fija; sin embargo,la baja frecuencia inicial viene asociada con una tensión tambiénbaja.
A frecuencias bajas, la caída de tensión en la resistencia delestator es, por tanto, relativamente elevada, comparada con latensión aplicada. Estas elevadas pérdidas por "1 R" darán comoresultado un flujo en el entrehien'o bajo y como consecuencia deello un par de alTanque también bajo. Para aumentar dicho parde arranque habrá que elevar la tensión aplicada a velocidadesbajas.
El valor de la tensión aplicada para una determinada frecuen-cia de entrada (fl) vendrá determinada por la frecuencia de relojVCT, de tal forma que, si se reduce la frecuencia de éste, aumen-tará la tensión aplicada, mientras que un aumento de la mismatendrá el efecto contrario.
VN •
¡;"
'"'lO c:::J~ I\" o f;;(B
La figura 5.37 muestra el circuito utilizado para conseguirdicha compensación. En este caso, la señal de velocidad VN'
obtenida del circuito de referencia de velocidad, será la señal deentrada al circuito. Teniendo en cuenta que dicha señal es siem-pre negativa, el valor de la tensión de salida del primer opera-cional "U 1 A"será:
R2 jvP¡> Iv) = VA <O = DI ConduceVA -R'( VN+ VP¡)= VN- Vp¡ = V < Iv 1= V >0 = O No conduce
I P¡ N A I
Por tanto, la ecuación anterior define la región en la queopera la compensación "I·R" de modo que, si se desea ampliardicha región, será necesario modificar la tensión Vpl' Dentrode la región de compensación, la influencia de VN en VVCTsepuede ajustar por medio de los potenciómetros P2 y p)' con loque se está variando la tensión nominal que le llega al motor(figura 5.38).
© /TP·PARANINFO

+12V
'6
OCM2 2B +VCc
U2 OCMl 26 VAV
Rl fRCT RCT4046 "Cl
CW24
Pl220pF
OCT10K Ul
22 OBMl
+Vcc21 OBM2
OAMlHEF 4752VP
+12V
'BCSP
OAM2
16FCT VCT
16vFCT " 17
fFCT fVCTU3 " 16"
330pF 4046 " C3
15
VVCT
Figura 5.39. Circuito generador PWM.
.f~-CT(mín)[VFCT= O]= R2'(Cz+32pF) IfFCT(máx) [VFCT= Vcd = a;.'P2.(¿+32PF) +frC1(1111n)
0,624· Vd 0,624· 310 Vfm, (1M= 1 )=fjy . --- = 50 Hz· ---- = 44 Hz
VN 200 V
El valor nominal de la frecuencia fvCT(N) será:
.f~crCN) = 6720J;"aC1M=I) = 295.680 Hzdonde 10 KfkR¡<1 MQ; 10 KQ<R2<1 MQ; lOOpF<C2<0,01/lF.
En este caso se ha elegido R2=820 KQ, P2=10K y C2=330pF,con lo que la frecuencia mínima de oscilación, para VFCT=OV,será: fFCT(mÍn)"'"3.368Hz.
Además, se sabe que fFCT=3.360·fout=3.360·f¡; de donde sededuce que la frecuencia de alimentación del estator (f¡) para lamínima frecuencia de oscilación de fFCT'vale:
f - f - .f~CT f - f - .f~CT(l11ín) l Hz0111- I - 3.360 ~. olll(mín)- ¡(mín)- 3.360 ::::
En la práctica será necesario ajustar el valor del potencióme-tro P2 con el fin de que cuando la señal VFCTsea máxima, la fre-cuencia de salida máxima del inversor fout(máx)"'" 100 Hz; esdecir el doble de la frecuencia nominal del motor.
La relación de frecuencias d=fFcJfvcT es importante en eldiseño del sistema. Si lo que se pretende es una modulación del100 %, se cumplirá:
.f~cr (N) ~ 3360".l;"/l fVC7
(N) ~ 0,5 'fvcr(N) ~ 147.840 Hz6720fo/l'
Para valores de IM<0,5 la modulación resulta ser senoidal,mientras que por encima de este valor la componente funda-mental de la tensión de salida se aproxima a una onda cuasi rec-tangular.
5.20.3. Señales de reloj "RCTy OCT"
5.20.2. Señal de reloj "VCT"En apartados anteriores se ha visto que en un motor asÍncro-
no, para mantener constante el par, es necesario mantener tam-bién constante e! flujo en el entrehierro o, lo que es lo mismo, larelación V ¡lf¡=constante.
El reloj "VCT" determina la relación tensión/frecuencia en elestator. Como consecuencia de ello, un aumento de la frecuen-cia fVCTreduce la profundidad de la modulación y, por tanto, latensión de salida, mientras que una disminución de fVCTprodu-ce el efecto contrario. Para la obtención de dicha señal de relojse utilizará el mismo oscilador que en el apartado anterior "U/,por lo que el diseño de dicho circuito se hará en base a las expre-siones anteriores.
Según las características del CI. HEF 4752, la frecuencia desalida para el 100 % de modulación de la portadora (lM=1) vale:
La señal de reloj "RCT" determina la frecuencia máxima deconmutación de! inversor "fJmáx)", mientras que la señal dereloj "OCT" determina la anchura mínima de los impulsos dedisparo. La frecuencia de reloj fRCTestá relacionada con la fre-cuencia máxima de conmutación del inversor, por la siguienteexpresión:
fRcr!s(máx)~ 280
En el caso de que fRCT=280KHz, se obtiene fs(máx)=1KHz.
Suponiendo que se trabaja a la frecuencia de salida con el100 % de modulación (fout=44 Hz):
f,(máx) 21' l /' lmf=' - lmpu sos CIC oj~llf
Si, por el contrario, se duplica la frecuencia de reloj RCT(fRCT=560 KHz), la frecuencia máxima de conmutación delinversor también se doblará [fJmax)=2KHzl, al igual que elnúmero de impulsos por ciclo (mr = 42), con lo cual aumenta el
© ITP-PARANINFO

•. t
MARCA
Figura 5.42.
V2 (fgiro) •
+5V f
I
En el supuesto de un motor que gira a una velocidad n=I.2oor.p.m.(20 r.p.s.), el lector de fibra óptica leerá una frecuencia degiro (fgiro)de 20 Hz, puesto que en un segundo ha leído 20impulsos. Ni que decir tiene que si la velocidad aumenta la fre-cuencia de giro también aumentará. En este caso para una fre-cuencia de giro de 20Hz le corresponderá una frecuencia de ali-mentación del motor (fl), suponiendo un deslizamiento del 2%con dos pares de polos (p=2), de valor:
n n 'pni =--= 1224 rp.m. = 11=_1 -= 40,SHz.
1- S 60
De la figura 5.42 se deduce:
Para detectar el número de vueltas a las que está girando elmotor se utilizará un sistema de detección opto-electrónico y detransmisión por "fibra óptica" mediante el cual no existe ningúntipo de conexión entre el fotodetector y el eje del motor (figura5.42). La detección del número de vueltas, se produce medianteun "haz fotónico" que al ser cortado o refractado (franja blancaen el eje), llega al receptor que la capta y la transforma para quepueda ser interpretada y traducida a revoluciones por minuto.
debe principalmente a dos causas: por una parte se consiguemejorar los tiempos de subida y de bajada de la señales de dis-paro (Slew-rate) y por otra parte se amplifican dichas señales dedisparo en cuanto a corriente se refiere.
5.22. Encoder de velocidad.Principio de funcionamiento
• TA = Tiempo de lectura de la marca.• TB = Tiempo de lectura de la zona sin marca.
T = Tiempo que tarda el lector en leer una vueltacompleta.
Como ya se ha dicho, los pulsos se producen al incidir el "hazde luz" emitido por el diodo del optoacoplador sobre la superfi-cie (blanca) marcada en el eje del motor. De esta forma el tran-sistor del optoacoplador se satura cuando recibe un haz de luzrefractado y se pondrá al corte cuando se interrumpe dicho haz.Estos pulsos generados en el optoacoplador, controlan el tran-sistor Q1 que estará en saturación cuando el anterior esté al cortey viceversa. A su vez el transistor Q I será el encargado de con-trolar el EMISOR fotónico.
En el otro extremo del cable de fibra óptica se encuentra elRECEPTOR, el cual se encarga de recibir los pulsos que leenvía el EMISOR para posteriormente ser tratados (salida TTL).
OA1"5
~ t
Tretraso
Ul
02 --o OA2
1o --~~·_··_·_-o 081
40174 2 04 082
7 -.?~OCl
15 06 - - -o oe2
9 -+ 12V
cp ¡:,rRi
OAMl
OAM2 o 13
OBM 1 o---·--~L- 11
OBM2 3
"00.0410-- 6
OCM2 o d5 14
-+ 12V
6 "
U2
B 9 12
4047
Figura 5.40. Tiempo de retraso.
I1
t 11I ------, ~~
I I 11
D_i 1D_i__ ~.. t
VQA-
5.21. Amplificador de impulsos
Partiendo de la tabla 5.4 se calcularán cada uno de estos tiem-pos, para valores de fRCT=foCT=280KHz,de tal forma que:
• Período de retraso intercalado: Trclraso=l6/foCT=57, I¡..¡seg.• Frecuencia del impulso de disparo=focI16=17,5KHz.• Anchura del impulso de disparo=4/foCT= 14,28¡..¡seg.
Figura 5.41. Amplificador de impulsos.
margen de frecuencias de salida (fout)y la componente funda-mental de salida será más senoidal (V 1)' Sin embargo, el valoreficaz (rms) de la tensión de salida disminuirá.
Por su parte la frecuencia de oscilación"fRcT(U2) vale en estecaso:
La entrada de reloj "OCT", conjuntamente con la entrada dedatos "K" (alta), se utiliza, como ya se ha expuesto, para deter-minar el período de retraso intercalado. Dicho tiempo es devital importancia cuando se produce un cambio entre las dossalidas complementarias de cada fase, a fin de evitar posiblescortocircuitos en el inversor. En la práctica se ha utilizado lamisma señal de reloj para OCT y para RCT (figura 5.40).
El motivo de intercalar esta etapa entre el generador deimpulsos (HEF 4752) y el circuito de excitación del puente, se
El circuito integrado "U ¡" es un disparador hexadecimal tipo"f1ip-tlop" con seis entradas (do, ... ,ds)' una entrada de reloj"CP", una entrada "RESET" de extralimitación asÍncrona de lared principal (MR) y seis buffers de salida (01, ...,06)' La infor-mación es introducida en las entradas y se transfiere a la salidacada vez que se produce un cambio del estado bajo (Low) alestado alto (High) de reloj, si MR está a nivel alto. CuandoMR está a nivel bajo, se ponen a cero todas las salidas, inde-pendientemente del estado en que se encuentren las entradas(figura 5.41).
© ITP-PARANINFO

nf.. = - = 49 Hz. g/m 60
Como consecuencia de ello, en el visualizador (figura 5.45)deberá aparecer el número "2940", de lo cual se va a encargar elCl. "U3", que en este caso trabaja como aestable.
Considerando la capacidad CT como la suma de CID' CI! yC12, la frecuencia de oscilación a la salida de este integrado será:
I/, = --------- =} 1,92 Hz ~.f~-:;.10,97 Hz
CTR22,u2·P2·(R21+1)-ln 2 .
o R3-JO R4
O R21-J..C3- T C4_.L_- C2T
f2 = 128 . f.~im = 6272 Hz
U14046fgiro
Figura 5.44. Tacómetro digital.
J'~ 14JD1 3
POR 128 I 11
l_·__ EJco ·I 4
Oi
f2
¡ENCOGER I
U24040
En efecto, si f iro=20Hz, la frecuencia a la salida del VCOserá de 2.560Hz dOx 128) y el número de vueltas del motor seráde 1.200 r.p.m. El siguiente paso será contar en el tiempo dese-ado 1.200 impulsos en lugar de 2.560, condición que hubieraresultado prácticamente imposible de no haber multiplicado lafrecuencia de giro.
En nuestro supuesto, la máxima velocidad de giro del motor,para un deslizamiento del 2% y una frecuencia de alimentaciónfl=IOOHz, será:
6011ni = -- = 3000 r.p.m.p
n = ni . (l-S) = 2940 I:p.m.
Figura 5.43. Tratamiento de la señal del encoder.
Con el fin de que el visualizador refleje la velocidad real degiro del motor y suponiendo, al igual que en el apartado anterior,una frecuencia de giro de 20Hz (1.200 r.p.m.), será necesarioaumentar de forma artificial la frecuencia de giro (fgiro)para queasí el "frecuencÍmetro" en cuestión pueda contar en un segundo1.200 impulsos y no 20 que son los que realmente lee la etapaanterior (ENCODER).
Puesto que la frecuencia de giro variará entre Oy 50Hz apro-ximadamente, a la salida del oscilador (VCO) la frecuencia será128 mayor que la de entrada, de tal forma que gracias al divisorde frecuencia "U2", en la entrada de la puerta OR-EXCLUSIVAse obtiene una frecuencia similar a la de giro (figura 5.44).
5.23. Tacómetro digital.Visualizador
En el supuesto anteriomlente citado, para un motor con un ejede 2 cm de diámetro y I cm de longitud de marca, se tiene:
L = 2 .t..r = 6,28 cm IT = -- = 50 m Te = T - TA = 42 m
fglro
ITA = _. T=8m
L
En la figura 5.43 está representado el circuito adaptador de laseñal del encoder.
Figura 5.45. Visualizador.
U2
RA. lOK
R3 33K
CJ e .•IOnF"~ ~1.uF"
u,
4046 ~O~O
fgiro
© ITP-PARANINFO
.5
U574C926
390
••
R13 220

¡Sin = 1.200 /p.m. =;f.'¡m = 20 H~ =;12= 2.560 H~ =;11= j~ = 2, 13 H~" n
Si n = 2.940 r.p./n. =;Iu¡m = 49 Hz =;12 = 6.272 Hz =;11= ~~= 2,13 Hz
Ue aqui se deduce que este CIrcuito l U3) se encargara degenerar un impulso cada 0,469 segundos [l/(2,13Hz)] aproxi-madamente, que corresponde al tiempo que necesita el fre-cuencímetro "Us" para contar los impulsos que se correspon-den con la velocidad de giro del motor.
Una vez determinada la frecuencia f3, será necesario gene-rar, a partir de esta señal, un impulso de RESET y otro deLATCH para que el frecuencímetro sea capaz de contardurante un cierto tiempo los impulsos que le llegan. AsÍ, laseñal f3 llega a través de Cs a la entrada del inversor "U4E"
para generar un impulso de LATCH. Con un retraso de unospocos milisegundos ocasionado por C7, dicho impulso llegaráa la entrada del inversor "U40", cuya salida se encargará deproducir la señal de RESET para reajustar los contadores delfrecuencí metro (Us),
Por otra parte, la señal de RESET, que en realidad es unimpulso de nivel lógico "uno", alcanzará a través de D3 laentrada del inversor "U4C'" invirtiendo el nivel lógico en susalida y manteniéndose en dicho estado gracias al retrasointroducido por Cs y a la retroacción obtenida con el inversorU4C' De esta forma D2 cortocircuitará a masa la entradaLATCH del frecuencÍmetro (Us) y, por tanto, los impulsoscorrespondientes a dicha orden procedentes del inversor U4Eno podrán llegar a éste, y el número que en ese momento apa-rece en el visualizador queda bloqueado. En el momento enque Cs se ha cargado totalmente, la salida de U4C se pondrá anivel alto (uno lógico) y D2 quedará polarizado inversamente,la entrada de LATCH ya no queda forzada a masa y los impul-sos de velocidad si llegan al visualizador. Modificando el cur-sar de Pise consigue variar la velocidad de lectura del fre-cuencÍmetro.
Finalmente, la frecuencia f2 se aplica a través de Rs al fre-cuencímetro Us' el cual se encargará de realizar todas las ope-raciones de conteo, memorización y visualización multiplexa-da sobre los cuatro displays, de manera que para poderfuncionar como tal deberán llegar a éste, además de la fre-cuencia f2, los impulsos LATCH y RESET.
C5 10nF
5.24. Circuito acondicionadorde velocidad
Al igual que sucedía en la regulación de C.C.,para poder rea-lizar la regulación en lazo cerrado se necesita disponer de unatensión de referencia "-ev" proporcional a la velocidad de girodel motor. Dado que el margen de variación de la velocidad delmotor está comprendido entre cero y el doble de su velocidadnominal, el margen de la tensión de velocidad deberá estar com-prendida entre cero y Iay aproximadamente, coincidiendo conel margen de variación del circuito de referencia de velocidad(YN)' Además, dicha tensión (-ev) ha de tener signo contrario aYN (negativa), que en este caso siempre será positiva.
Se trata pues, de convertir la frecuencia "f2", que es propor-cional a la frecuencia de giro (f2=128·fgiro), mediante un conver-tidor frecuencia tensión (U 1) , en la tensión de referencia desea-da. De esta forma se obtiene a la salida una tensión (-ev)'proporcional a la velocidad del motor (figura 5.46).
Para disminuir el nivel de ruido, así como para conseguir lapolaridad adecuada y facilitar el ajuste de la señal, se colocaráun filtro activo (U2) y un amplificador de ganancia variable(U3S)' El valor de la constante "Kv" del convertidor se puedeobtener a partir de la expresión:
V = 121-
Kv
En el caso de que fgiro=49 Hz, se obtendrá f2=6272 Hz, y elvalor de la constante del convertidor "Kv" será:
K = 12 6272 = 627 HzJVv V 10
1
5.25. Protección contrasobrecorrientes
En este caso, de nuevo, se vuelve hacer uso de un sensor porefecto Hall para proteger al sistema ante cualquier aumentoexcesivo de la cOlTienteabsorbida por el motor. El elemento sen-sor se encargará por tanto de generar una tensión (YH) propor-cional a la variación del campo magnético producido por lacorriente de una fase del motor y de la misma Índole (senoidal).
+12V
Cl
12 o---J470pF
6
U1
LM 331
4
C2Ji'R8220K
-12V
1/2 TL 082
R12 P2
Figura 5.46. Circuito acondicionador de velocidad.
© ITP-PARANlNFO

El sensor utilizado es el mismo que para la regulación dec.c.[HA 030S2 (ELECTRO-P lP)] y cuya tensión de salida (efi-caz) es aproximadamente igual a:
1V "'"4. deleclllda
H lnomin,,1
Por ejemplo, para ldclcclada=l5A, con una vuelta en elentrehierro, se obtendrá una tensión VH=2Y.
Puesto que dicha señal de salida será de la misma naturalezaque la corriente a medir (senoidal), resulta necesaria la presen-cia de un rectificador de precisión a la salida del transductor, detal forma que convierta la señal senoidal (VH) en una tensióncontinua (V2) proporcional a la corriente absorbida por el motor(figura 5.47).
Recordando que el sistema se para cuando la entrada"L"(HEF 4752) se pone a nivel bajo. En el momento en queel valor de la corriente detectada supera el valor fijado con P2'
la salida del comparador "U?" se pondrá a nivel bajo(V Hall=OV)y, por tanto, la entrada "L" también estará a nivelbajo (motor parado).
El bloque "U 1" constituye el rectificador de precisión. Laganancia del mismo está determinada por el valor de R1, R2 Y laposición del cursor de P1•
En cuanto a "U2" constituye un comparador, ya que elamplificador operacional trabaja en lazo abierto. La tensión
de salida VHallsólo podrá estar a nivel bajo (si la intensidaddetectada no supera un determinado límite) o a nivel alto (sisupera dicho límite).
5.26. Perfil armónico de lamodulación senoidaldel anchode pulso
Un inversor trifásico puede considerarse como tres inverso-res monofásicos con la salida de cada inversor monofásicodesplazada 120 0. En este caso las señales de excitación segeneran al comparar una señal senoidal de referencia de ampli-tud "A/' con una onda portadora (triangular) de amplitud "Ac"y frecuencia "fs". La frecuencia de la señal de referencia"f/'determina la frecuencia de salida del inversor :'fou/' (f,=fout)
y su amplitud de pico (A,) controla el índice de modulación"1M" y, por tanto, el voltaje eficaz (rms) de salida (Vout)' Elnúmero de pulsos por cada medio ciclo (q) depende de la fre-cuencia portadora (fs)' Dentro de la restricción de que dos tran-sistores de la misma rama (p.e. QA + y QA') no pueden condu-cir simultáneamente, el voltaje instantáneo de salida semuestra en la figura 5.48.
C2
10nFR2 10K P1 500 K
HA 03052
+12V
-12V
Figura 5.47. Circuito de protección contra sobrecorrientes.
R1
10K
R3
VHall
Señal Vcont,ol A Señal de V e
: -'1/1$
VAN(QA+)
wl
VBN(QB+)
wl
VAB=VAN-VBN
Figura 5.48. Formación de señales P.W.M.
© ITP-PARANINFO

•(ue%\\ot\e% . ,l\e t\u\oe~a\uat\ot\
.:. 1. El motor asíncrono de inducción: principio de fun-cionamiento, balance de potencias, característicapar-velocidad. .:.
.:. 2. Posibles formas de variar la velocidad en un motorasíncrono de inducción..:. 3. ¿En qué consiste la variación de velocidad por .:.modulación de anchura de impulsos (PWM)?
.:. 4. Diagrama de bloques de un regulador de velocidadpara motores de corriente alterna trifásico. Indicar .:.sus partes más importantes.
.:. 5. Misión de la resistencia de frenado en el convertidorAC-DC (rectificador + filtro) de un sistema de regu- .:.lación para motores de inducción.
.:. 6. Formas de onda (de tensión y de corriente) en bor-nas de un motor de inducción con control por PWM.
Justificar el tiempo de conducción de cada uno delos elementos.
7. Análisis del proceso de conmutación de los elemen-tos de potencia en una rama del inversor trifásico.Indicar los diferentes intervalos de tiempo que seproducen en dicho proceso .
8. Misión del circuito de referencia de la velocidad y elcircuito de compensación de I·R en un sistema deaccionamiento por variación de frecuencia.
9. Detección de la velocidad de giro en un motor asín-crono (r.p.m.) mediante un sistema de detecciónopto-electrónico.
10. ¿Qué inconvenientes conlleva la presencia de armó-nicos en la tensión de alimentación de un motor deinducción cuando éste está alimentado con un con-vertidor estático de frecuencia?
© ITP-PARANlNFO

• INSTRUMENTACIÓN INDUSTRIAL.Autor: Antonio Creus Sole.Editorial:Marcombo Boixareu Editores.ISBN: 84-267-0765-3
• TRANSDUCTORES y ACONDICIONADORES DESEÑAL.Autor: Ramón Palias Areny.Editorial:Marcombo Bixareu Editores.ISBN: 84-267-0764-5
• SENSORES y ANALlZADORES.Autor: Harry N. Norton.Editorial: Gustavo Gili, S.A.ISBN: 84-252-1193-X
• CONTROL ELECTRÓNICO DE LOS MOTORES DECORRIENTE ALTERNA.Autor: R.Chauprade / FMilsant.Editorial: Gustavo Gili S.A.ISBN: 84-252-1156-5
• ELECTRÓNICA INDUSTRIAL. ELECTRÓNICA DEREGULACIÓN Y CONTROL.Autor: Hansruedi Bühler.Editorial: Gustavo Gili, S.A.ISBN: 84-252-1279-0
• ELECTRÓNICA INDUSTRIAL. ELECTRÓNICA DEPOTENCIA.Autor: Hansruedi Bühler.Editorial: Gustavo Gili, S.A.ISBN: 84-252-1253-7
• ELECTRÓNICA DE POTENCIA. CIRCUITOS, DISPOSI-TIVOS Y APLICACIONES.Autor: Muhammad H. Rashid.Editorial: Prentice Hall Hispanoamericana S.A.ISBN: 968-880-586-6
• TIRISTORES y TRIACS.Autor: Henri Lilen.Editorial: Marcombo Boixareu Editores.ISBN: 84-267-0281-3
• POWER ELECTRONICS. CONVERTERS, APPLlCA-TIONS AND DESIGN.Autor: Mohan, Undeland, Robbins.Editorial: Wie-Wiley.ISBN: 0-471-50537-4
© ITP-PARANINFO
• INSTRUMENTACIÓN Y CONTROL INDUSTRIAL.Autor: W. Bolton.Editorial: Paraninfo.ISBN: 84-283-2279-1
• ELECTRÓNICA INDUSTRIAL. DISPOSITIVOS, MÁ-QUINAS Y SISTEMAS DE POTENCIA INDUSTRIAL.Autor: James T. Humphries. Leslie P. Sheets.Editorial: Paraninfo.ISBN: 84-283-2278-3
• ELECTRÓNICA INDUSTRIAL. DISPOSITIVOS, EQUI-POS Y SISTEMAS PARA PROCESOS Y COMUNICA-CIONES INDUSTRIALES.Autor: James T. Humphries. Leslie P. Sheets.Editorial: Paraninfo.ISBN: 84-283-2282-1
• CATÁLOGO TÉCNICO DE HARRIS SEMICONDUC-TOR.Mayo 1992.REVISTA ESPAÑOLA DE ELECTRÓNICA.Diciembre 1993.
• CATÁLOGO TÉCNICO DE ÉLECTRO-PJP. L'ÉLECTRO-NIQUE AU SERVICE DE LA PUISSANCE.Les détecteursélectroniques de curant "effet HALL" "NOUVELLE GÉNÉ-RATION".Octubre 1993.
• REVISTA ELECTRONIQUE PRATIQUE.Número 211- Febrero 1997
• POWER MOSFET TRA SISTOR DATA.Autor-Editor: Motorola.ISBN: 1-8707060-00-X
• CATÁLOGO TÉCNICO TOSHlBA.DATA BOOK. GTRMODULE (lGBT).Autor-Editor: Toshiba.
• CATÁLOGO TÉCNICO SEMIKRON. INNOVATION+SERVICE. SEMICONDUCTORES DE POTENCIA.Autor-Editor: Semikron.
• CATÁLOGO TÉCNICO SEMIKRON. INNOVATION+SERVICE.POWER SEMICONDUCTORES.Autor-Editor: Semikron.


Jtras obras de la misma colección
6!=ppublicadas por I~
I Instalaciones eléctricas de enlace y centros de transformación
I Sistemas electrónicos de información
Otras obras complementarias:
Formación en centros de trabajo
I Formación y ori ntaci6n laboral
I Calidad
Ilnstaladones automatizadas en viviendas y edificios
I Automatismos y cuadros eléctricos
I Sistemas electrotécnicos de potencia. Electr6nica de regulación y control de potencia
I Desarrollo de instalaciones eléctricas de distribución
I Mantenimiento de máquinas eléctricas
I Electrónica digital y microprogramable
I Sistemas de control secuendal

PROVINCIA:
FAX:
SERVICIO DE INFORMACIÓN PERIÓDICA IEnvíe cumplimentado por correo este cuestionario y recibirá un catálogo completo denuestros libros:
NOMBRE: _
CALLE: _
CIUDAD: _
CÓDIGO POSTAL: _
TELÉFONO: _
ÁREAS DE SU INTERÉS IAeronáutica y Astronomía O
Alimentación O
Arquitectura, construcción, obras públicas, ingeniería . . . . . . . . . . . . . . . . . . . . . . . . O
Audio-Estereofonía HiFi O
Automovilismo-Motociclismo-Motores O
Ciencias de la Información O
Circuitos - Componentes - Semiconductores - Válvulas. . . . . . . . . . . . . . . . . . . . . . . O
Colección Filología Paraninfo O
Colección "Lógica y teoría de la Ciencia" . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . O
Dibujo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . O
Diccionarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . O

Educación D
Electricidad D
Electrónica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D
Filología D
Física y Química. . . . . . . . . . . . . . . . . . . . . . . . • . . . . . . . • . • . . . . . . . . . . . . . . . . . . . . D
Geología - Cristalografía - Petrología - Topografía D
Grafología ...........•.............................•.•.•............. DHostelería - Turismo y Restauración .••...•............................... DInformática . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . • . . . . . . . . . . . . . DLegislación, Sistema constitucional, Reglamentos y normas . . . . . . . . . . . . . . . . . . . DMatemáticas - Estadística - Problemas '.' . . . DMedicina - Enfermería . . • • . . . • . . • . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . DMetales - Soldadura ..••••.•..•.•....••....•................•..•..•.... l:J
Navegación - Técnica naval .................•.•••.•...•.............•... l:J
Neumática e hidráulica ..................•..•••.•.•..•.•.••..•.......•.. D
Obras varias . . . . . . . . . . . . . . . . . . . . . . . . . • . . . . . . . . . . . . . . . . . . . . . . . . • . . • . • . . D
Organización comercial y empresarial . . . • . . . • . • • . . • . . . . . . . . . . . . . . . . . . . . . . . D
Pedagogía - Enseñanza - Sociología. . . . . . . . . . . . . . . . . • . . . . • . . . . . . . . . . . . . . . . D
Peluquería y Esteticien ..................•..••....••.••................. D
Psicología. . . . . . . . • . . . . . . . . . . . . . . . . . . . . . . • . . . . . . . . . • • • . . . . . . . . . . . . . . . . D
Radio, transmisión, telecomunicación y radioafición ......••................. D
Refrigeración y calefacción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . DSeguridad y control. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . DTelevisión - Vídeo DVestido y calzado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D

PROVINCIA:
___ B_O_LET_IN_DE_PE_D_ID_O 1
NOMBRE: _
PRIMER APELLIDO: _
SEGUNDO APELLlDO: _
CALLE, AVDA., PLZA.: N° Pta. _
CIUDAD: _
CÓDIGO POSTAL: _
FECHA:
Le ruego me envíen los títulos que a continuación señalo:
Para su pago:D Remito giro postal de ptas.
D Adjunto cheque de ptas.
D Envíen a reembolso con gastos a mi cargo.
D Efectúen cargo en tarjeta de crédito:
DVISA
D AMERICAN EXPRESSNúmero _
Titular _
Fecha de caducidad _
Firma del titularde la tarjeta
el Magallanes, 25 - 28015 MADRIDTfno.: 4463350
Tfno. pedidos: 446 5613E-mail: [email protected] - Telefax: 4456218