sistema y marco de referencia terrestre ... 1.- introducciÓn será necesario un sistema de...
TRANSCRIPT

1
SISTEMA Y MARCO DE REFERENCIA TERRESTRE SISTEMAS DE COORDENADAS
Valencia Enero de 2011
Aacutengel Martiacuten Furones Departamento de Ingenieriacutea Cartograacutefica Geodesia y Fotogrametria Universidad Politeacutecnica de Valencia
2
INDICE 1 Introduccioacutenhelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
2 Sistema de referencia terrestre geoceacutentrico convencionalhelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
21 Definicioacuten del sistemahelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
22 Sistemas de coordenadashelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 4
221 Coordenadas cartesianas y esfeacutericashelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 4
222 Sistema de coordenadas geograacuteficashelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 5
223 Sistema de coordenadas geodeacutesicas y geoceacutentricas Sistema de
referencia geodeacutesicohelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip
6
224 Sistema de coordenadas astronoacutemicas Sistema de referencia graviacuteficohellip 7
23 Movimiento del polo Coordenadas instantaacuteneas y absolutashelliphelliphelliphelliphelliphelliphelliphellip 8
24 Sistemas de referencia geodeacutesicoshelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 12
241 Sistemas de referencia geodeacutesicos globaleshelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 12
242 Sistemas de referencia geodeacutesicos localeshelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 13
25 Marco de referencia terrestre internacional (ITRF)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 14
251 ITRF2000 ITRF2005 e ITRF 2008helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
252 Marco de referencia WGS84helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 19
253 Marco de referencia IGShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 20
254 Sistema y marco de referencia terrestre europeo (ETRF89)helliphelliphelliphelliphelliphelliphellip 22
Bibliografiacuteahelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 24
3
1- INTRODUCCIOacuteN Seraacute necesario un sistema de referencia terrestre para la determinacioacuten de coordenadas sobre la Tierra y para el estudio del movimiento y deformaciones de la corteza terrestre de manera que se convierte en una herramienta imprescindible en el desarrollo de las diferentes ciencias de la Tierra en especial de la Geodesia Geofiacutesica Geodinaacutemica Cartografiacutea Topografiacutea Navegacioacuten sobre la superficie terrestre y para la localizacioacuten de cualquier observacioacuten que se realice En primer lugar se deben distinguir los conceptos Sistema de referencia Sistema de referencia Convencional Marco de referencia y Sistema de Coordenadas
Sistema de referencia es una definicioacuten conceptual de teoriacuteas hipoacutetesis y constantes que permiten situar una tripleta de ejes coordenados en el espacio definiendo su origen y su orientacioacuten
Sistema de referencia convencional es un sistema de referencia donde todas las
constantes numeacutericas paraacutemetros e hipoacutetesis y teoriacuteas para el establecimiento del sistema de referencia son especificadas de modo concreto
Marco de referencia es la materializacioacuten de un sistema de referencia
convencional a traveacutes de observaciones es decir se trata de un conjunto de puntos (lugares localizados en la superficie terrestre) con coordenadas y velocidades conocidas en ese sistema de referencia convencional y que sirven para materializar en el espacio el sistema de referencia
Sistema de coordenadas es la parametrizacioacuten de las coordenadas de los
puntos que forman el marco de referencia En este sentido existen infinitos sistemas de coordenadas para parametrizar el marco de referencia por ejemplo las coordenadas (xyz) (φλH) (ENh) etc 2 SISTEMA DE REFERENCIA TERRESTRE GEOCEacuteNTRICO CONVENCIONAL
21- Definicioacuten del sistema Se utilizaraacuten unos ejes de coordenadas fijos sobre la Tierra es decir que giren con ella de manera que las coordenadas de un punto en principio seraacuten siempre las mismas Los convencionalismos que llevan el sistema de referencia a convencional son
bull Origen Centro de masas terrestres o geocentro incluyendo la atmoacutesfera y los oceacuteanos
bull Eje Z coincide con el eje de rotacioacuten terrestre
bull Plano meridiano pasa por cualquier punto de la tierra y contiene al eje de
rotacioacuten
bull Plano ecuador es perpendicular al eje de rotacioacuten y para por el geocentro
bull Eje X se situacutea en la direccioacuten del plano meridiano que pasa por Greenwich y contenido en el plano ecuador Es considerado internacionalmente como meridiano oriacutegen o meridiano cero desde 1884
bull Eje Y contenido en el plano ecuador y perpendicular al eje X y su sentido seraacute
tal que los tres ejes formen una tripleta dextroacutegira
4
P (XYZ)
XY
Z
P (XYZ)P (XYZ)P (XYZ)
XY
Z
P (XYZ)
XY
Z
φλ
r
P (XYZ)
XY
Z
P (XYZ)P (XYZ)P (XYZ)
XY
Z
φλ
r
22- Sistemas de coordenadas 221- Coordenadas cartesianas y esfeacutericas Cualquier punto de la superficie terrestre presentaraacute coordenadas (X Y Z) en la tripleta de ejes coordenados definida siendo estos puntos los que constituyen el marco de referencia figura 1
En cualquier caso es habitual el uso de coordenadas esfeacutericas para la
parametrizacioacuten de los puntos sobre la Tierra (rφλ) figura 2 donde de forma geneacuterica r es la distancia radial al geocentro φ la latitud geoceacutentrica (aacutengulo entre r y el plano del ecuador) y λ la longitud geoceacutentrica (aacutengulo entre el plano meridano de Greenwich y el del punto de caacutelculo medido en el plano del ecuador)
Figura 1 Sistema de coordenadas cartesianas
Figura 2 Sistema de coordenadas esfeacutericas
5
La relacioacuten entre las coordenadas esfeacutericas y las cartesianas es un producto de matrices correspondiente a la parametrizacioacuten regular de la esfera
=
ϕϕλϕλ
sensenr
ZYX
coscoscos
Para la correcta definicioacuten de la distancia radial r (distancia diferente para cada punto de la Tierra y que no sigue ninguacuten patroacuten geomeacutetrico exacto) se debe introducir una superficie de referencia como aproximacioacuten a la forma real de la Tierra 222- Sistema de coordenadas geograacuteficas En primera aproximacioacuten la Tierra es una esfera homogeacutenea de radio R
El eje de rotacioacuten corta la superficie terrestre en dos puntos el polo geograacutefico Norte (PN) y en el polo geograacutefico Sur (PS) El polo geograacutefico Norte es aquel desde el que si se observa la Tierra hacia su interior esta rota en el sentido contrario a las agujas del reloj figura 3
La vertical de cualquier punto sobre la superficie terrestre pasaraacute por el centro de la Tierra La posicioacuten de un punto E de la superficie de la Tierra se determina por dos coordenadas figura 4
bull Se llama latitud geograacutefica (φ) del punto E al aacutengulo que forma la vertical de E con el plano del ecuador terrestre La latitud geograacutefica variacutea de 0ordm a 90ordm en el hemisferio boreal (latitud norte) y de 0ordm a -90ordm en el hemisferio austral (latitud sur)
bull Se llama longitud geograacutefica (λ) del punto E al aacutengulo que forma el meridiano
del punto con el meridiano origen La longitud geograacutefica variacutea de 0ordm a 180ordm en
Figura 3 Aproximacioacuten esfeacuterica a la Tierra
6
el hemisferio oriental y de 0ordm a -180ordm en el hemisferio occidental es decir el primero al este y el segundo al oeste
223- Sistema de coordenadas geodeacutesicas y geoceacutentricas Sistema de referencia geodeacutesico La segunda aproximacioacuten a la forma de la Tierra es un elipsoide de revolucioacuten definido por su semieje mayor (a) y su semieje menor (b) o aplanamiento (f) El centro del elipsoide coincide con el centro del sistema de referencia es decir con el geocentro y el semieje menor se hace coincidir con el eje de rotacioacuten terrestre quedando asiacute constituido el sistema de coordenadas geodeacutesico
La vertical geodeacutesica en un punto de la superficie del elipsoide de revolucioacuten coincide con la direccioacuten del vector normal al elipsoide en dicho punto y por tanto no pasa por el centro del elipsoide figura 5
Asiacute las coordenadas geodeacutesicas seraacuten
bull Latitud geodeacutesica es el aacutengulo que forma la vertical geodeacutesica del punto con el
plano ecuador geodeacutesico
bull Longitud geodeacutesica es el aacutengulo formado por el meridiano geodeacutesico del punto de caacutelculo y el meridiano geodeacutesico origen
Introducimos en este momento las coordenadas geoceacutentricas ya que sobre el
elipsoide no coincidiraacuten con las geodeacutesicas en este caso la longitud geoceacutentrica seraacute igual a la geodeacutesica pero la latitud geoceacutentrica (β) seraacute el aacutengulo entre la liacutenea que une el centro del elipsoide y un punto sobre el elipsoide y el ecuador geodeacutesico
Figura 4 Coordenadas Geograacuteficas
7
ββ
224- Sistema de coordenadas astronoacutemicas Sistema de referencia graviacutefico Las observaciones astronoacutemicas geodeacutesicas y topograacuteficas se efectuacutean sobre la
superficie real de la Tierra y en un momento de tiempo determinado asiacute se debe retocar el concepto de figura y forma de la Tierra y pasar a la definicioacuten de geoide como figura y situar las observaciones en un momento determinado
El geoide se define como superficie equipotencial respecto a la gravedad y
normal a su direccioacuten siendo esta direccioacuten normal la de la fuerza de gravedad que seraacute la que sigue un rayo oacuteptico de un instrumento topograacutefico cuando se estaciona o liacutenea de la plomada Debido a la distribucioacuten no homogeacutenea de masas en el interior de la Tierra y a la forma achatada por los polos esta liacutenea no coincidiraacute ni con la vertical geograacutefica ni con la geodeacutesica ni con la geoceacutentrica figura 6 Asiacute se puede definir
bull Dado un punto P de la superficie topograacutefica terrestre se denomina vertical
astronoacutemica instantaacutenea de P a la recta tangente en P a la liacutenea de la plomada en ese punto
bull Se denomina plano ecuador astronoacutemico instantaacuteneo al plano perpendicular al
eje instantaacuteneo de rotacioacuten que pasa por el centro de masas de la Tierra
bull Se llama plano meridiano astronoacutemico instantaacuteneo de P al plano que contiene a la vertical astronoacutemica de P y al eje instantaacuteneo de rotacioacuten terrestre
Definieacutendose las coordenadas astronoacutemicas instantaacuteneas como
bull Latitud astronoacutemica de P es el aacutengulo Ф que forma la vertical astronoacutemica de P con el plano del ecuador astronoacutemico instantaacuteneo Variacutea de 0ordm a 90ordm en el hemisferio astronoacutemico norte y de 0ordm a -90ordm en el hemisferio astronoacutemico sur
bull Longitud astronoacutemica de P es el aacutengulo Λ que forma el plano meridiano
astronoacutemico instantaacuteneo de P con el plano meridiano astronoacutemico instantaacuteneo tomando como origen (Greenwich) Se suele considerar de 0ordm a 360ordm positiva al este
Figura 5 Coordenadas geodeacutesicas y geoceacutentricas
8
23- Movimiento del polo Coordenadas instantaacuteneas y absolutas
La direccioacuten del eje de rotacioacuten terrestre cambia con el tiempo respecto a la propia superficie terrestre y por tanto respecto al sistema de referencia geoceacutentrico terrestre
El polo describe a lo largo del tiempo una trayectoria libre que es una curva
maacutes o menos circular de radio 6 metros figura 7 y periodo aproximado de 430 diacuteas provocado por el caraacutecter deformable de la Tierra redistribuciones interiores de las masas terrestres efectos del rebote postglaciar en Canadaacute y Fenoscandia movimientos tectoacutenicos redistribuciones atmosfeacutericas etc figura 8
Superpuesta a eacutesta trayectoria libre se encuentran una serie de oscilaciones
forzadas provocadas por la influencia gravitatoria del Sol y la Luna con una magnitud de 60 centiacutemetros figura 7
Eje Instantaneo de Rotacioacuten
Meridiano Instantaneode Greenwich
Eje Z
Eje X
Eje YCentro de Masas
Liacutenea Vertical (Plomada)
Tangente a la vertical por el punto P
Vector de gravedad
Superficie equipotencial de P (WP)
P
Λ Φ
Eje Instantaneo de Rotacioacuten
Meridiano Instantaneode Greenwich
Eje Z
Eje X
Eje YCentro de Masas
Liacutenea Vertical (Plomada)
Tangente a la vertical por el punto P
Vector de gravedad
Superficie equipotencial de P (WP)
P
Λ Φ
Figura 6 Coordenadas Astronoacutemicas
9
Este movimiento del polo afecta directamente a las coordenadas de los puntos sobre la superficie terrestre ya que el sistema de referencia iraacute cambiando Lo maacutes indicado es tomar como eje Z de referencia el origen o centro de los ciacuterculos de movimiento libre quedando asiacute determinado el eje Z de un modo convencional Si las coordenadas de los puntos se refieren al polo convencional tendremos coordenadas absolutas si se refieren al polo instantaacuteneo (situacioacuten del eje de rotacioacuten en un determinado momento) tendremos coordenadas instantaacuteneas
No hay teoriacutea cientiacutefica que pueda predecir el movimiento del polo y por lo
tanto su posicioacuten asiacute que se monitoriza continuamente mediante observaciones Esta materializacioacuten se realizaba con observaciones astronoacutemicas lo que dio lugar al establecimiento de tres polos diferentes
bull Polo CIO desde 1899 la International Latitude Service (ILS) utilizando
observaciones astronoacutemicas sobre cinco estaciones en un mismo paralelo (φ = 39ordm 08rsquo) llegoacute a la definicioacuten del polo CIO (Convencional International Origen) definido como la posicioacuten media del polo entre 1900 y 1905 de manera que se obtuvieron determinaciones precisas de
6 m
60 cm
O
6 m
60 cm
O
Figura 7 Movimiento libre y oscilaciones forzadas que cuya suma describe el movimiento del polo
Figura 8 Causas del movimiento del polo
10
los largos periacuteodos del movimiento del polo (su situacioacuten antildeo a antildeo figura 9) La precisioacuten de estas determinaciones se cifroacute en 3 metros
bull Polo BIH (Bureau International de lrsquoHeure) Por otro lado el eje X del
sistema de referencia geoceacutentrico terrestre convencional se determinoacute a partir de las longitudes de 50 estaciones por la BIH creada en 1912 para mantener la escala de tiempo uniforme es decir era el organismo encargado del mantenimiento de la hora y de la posicioacuten del origen de longitudes (posicioacuten media del observatorio astronoacutemico de greenwich) a traveacutes de determinacioacuten de la longitud astronoacutemica de los observatorios pertenecientes a este organismo La determinacioacuten de la latitud de estos observatorios generoacute el polo BIH que proporcionaba estimaciones maacutes frecuentes (medias de 5 diacuteas) y precisiones de 1 metro en la determinacioacuten del movimiento del polo
bull Polo IPMS Cada vez con maacutes frecuencia se empezoacute a necesitar los
movimientos de corto periodo del polo para aplicaciones geodeacutesicas y astronoacutemicas figura 9 por lo que el ILS se reorganizoacute en 1962 en el Internacional Polar Motion Service (IPMS) asiacute surge el polo IPMS generado a partir de determinaciones de latitud astronoacutemica en 80 estaciones y con precisioacuten de un metro en la determinacioacuten del movimiento del polo
En 1967 el polo CIO es aceptado como estaacutendar por la International
Astronomical Union para dar asiacute continuidad a las observaciones maacutes antiguas eferidas al polo CIO por lo que los polos BIH e IPMS se intentan referenciar al polo CIO esto no es posible debido a las precisiones de los diferentes polos ya que se trata de la determinacioacuten de un ciacuterculo aproximadamente de 6 metros de diaacutemetro que queda definido con 3 metros de error en el polo CIO y con un metro en los otros dos es decir en realidad con estas precisiones se estaacute hablando del mismo polo
La situacioacuten se complica a partir de ese antildeo debido a la irrupcioacuten de la
geodesia por sateacutelite Se empiezan a utilizar medidas a sateacutelite para la determinacioacuten del movimiento del polo en concreto medidas Doppler a los sateacutelites de la constelacioacuten TRANSIT alcanzando precisiones de 02 metros
En los antildeos siguientes nuevas teacutecnicas espaciales demuestran la precisioacuten de
las mismas en la determinacioacuten del movimiento del polo medidas laacuteser a sateacutelites o a la Luna VLBI GPS DORIS PRARE Todas estas teacutecnicas se basan en la medicioacuten continua de coordenadas por lo que la monitorizacioacuten del polo es permanente y su precisioacuten se reduce hasta los 6-8 centiacutemetros
Figura 9 Movimientos de largo y corto periodo del polo
11
Asiacute en 1984 la BIH establecioacute un nuevo sistema de referencia terrestre basado
en las coordenadas cartesianas geoceacutentricas de las estaciones fundamentales donde teacutecnicas espaciales habiacutean sido aplicadas este nuevo sistema coincide con el polo CIO astronoacutemico si se tienen en cuanta las precisiones en la determinacioacuten del CIO lo cual permite dar continuidad a las coordenadas determinadas antiguamente
Finalmente en 1987 se creoacute la Internacional Earth Rotacion Service (IERS)
reemplazando a la BIH y a la IPMS para entre otras cosas monitorizar el movimiento del polo basaacutendose en teacutecnicas espaciales de forma continua (obtencioacuten del polo instantaacuteneo figura 10) con lo que el polo BIH determinado en 1984 pasoacute a llamarse polo IERS Desde abril de 2003 el nombre fue cambiado al de Internacional Earth Rotation and Reference Systems Service (IERS) proporcionando las coordenadas instantaacuteneas del polo para cada diacutea referidas al polo IERS cuyo eje X seraacute el meridiano de Greenwich convencional y el eje Y estaacute situado hacia el Oeste (direccioacuten de su sentido positivo) formando 90 grados las unidades de estas coordenadas son segundos de arco figura 11
En las paacuteginas httpwwwiersorg y httphpiersobspmfr se puede
encontrar mucha maacutes informacioacuten Como se ha dicho las mediciones se realizan en un momento determinado (t)
conociendo a traveacutes de los valores proporcionados por la IERS los valores para el movimiento del polo se podraacuten transformar los valores de latitud y longitud instantaacuteneos a valores de latitud y longitud absolutos sobre el sistema de referencia
Figura 10 Polo instantaacuteneo en lila y polo medio en amarillo
Figura 11 Sistema de referencia y coordenadas en las que se expresa el movimiento del polo
12
geoceacutentrico terrestre convencional Los valores de esta correccioacuten rondan los 01 segundos
24- Sistemas de referencia geodeacutesicos
241- Sistemas de referencia geodeacutesicos globales GRS80 y WGS84
Se definiraacute daacutetum como el conjunto de paraacutemetros que definen la posicioacuten de
un elipsoide respecto a la tierra Para determinarlo hace falta conocer la geometriacutea del elipsoide a y f su posicioacuten respecto al geocentro ∆X ∆Y ∆Z (coordenadas del centro del elipsoide respecto al geocentro) su orientacioacuten R1 R2 R3 (orientacioacuten de los ejes del elipsoide respecto a los terrestres) y la escala k
Si ∆X = ∆Y = ∆Z = 0 el daacutetum Geodeacutesico se llama Global o absoluto El Geodetic Reference System 1980 (GRS80) adoptado por la IUGG
(International Union of Geodesy and Geophysics) por su asamblea general de Camberra en 1979 pertenece a este grupo
Este sistema reemplaza al GRS67 por no representar adecuadamente el
tamantildeo forma y el campo gravitatorio con precisioacuten suficiente para la mayoriacutea de aplicaciones geodeacutesicas geofiacutesicas astronoacutemicas e hidrograacuteficas
Los principales paraacutemetros del sistema son
a = 6378137 m (Obtenido a partir de medidas SLR y Doppler) J2 = 10826310-8 (Obtenido a partir de perturbaciones en la oacuterbita de sateacutelites) GM = 3986005108 m3sg2 (Obtenido a partir de SLR LLR y pruebas espaciales) ω = 729311510-11 rdsg (Obtenido a partir de medidas astronoacutemicas) La orientacioacuten del eje Z seraacute la definida por el polo CIO como eje X el meridiano 0 definido por la BIH y el eje Y formando la tripleta dextroacutegira Este sistema sigue en vigor y no se ha actualizado en su definicioacuten ya que se debe tener en cuenta que por debajo del metro en la diferencia de paraacutemetros no existe una diferencia praacutectica en la determinacioacuten de coordenadas Asiacute las mejoras del mismo se consideran avances cientiacuteficos pero el estaacutendar (GRS80) no se debe cambiar
Cuando la informacioacuten sobre el datum se obtiene a partir de posiciones dentro de la oacuterbita de los sateacutelites (determinacioacuten dinaacutemica del sistema) los coeficientes del potencial gravitatorio (J2) asiacute como algunas constantes (ω velocidad de la luz constante gravitatoria geoceacutentrica) forman parte de la definicioacuten del datum ya que se calculan todas juntas
Un ejemplo de eacuteste uacuteltimo grupo es el World Geodetic System 1984 (WGS84)
utilizado por la teacutecnica GPS y obtenido exclusivamente a partir de los datos de la constelacioacuten de sateacutelites GPS
Los valores de sus principales paraacutemetros son
a = 6378137 m
J2 = 108262998310-8
GM = 3986004418108 m3sg2
13
ω = 729311510-11 rdsg
1f = 298257223563
El World Geodetic System 1984 (WGS84) utiliza como eje Z el polo IERS como eje X el meridiano 0 definido por el IERS y el eje Y formando la tripleta dextroacutegira Su origen coincide con el geocentro
A nivel praacutectico tal como se puede deducir el GRS80 y el WGS84 se pueden
considerar ideacutenticos 242- Sistemas de referencia geodeacutesicos locales ED50 Si ∆X ne ∆Y ne∆Z ne 0 nos encontramos ante un datum local El marco local queda definido por siete paraacutemetros (o mejor dicho 6 maacutes una condicioacuten) valores para a y f (geometriacutea del elipsoide) valores de las desviaciones de la vertical (ξ η) y de la ondulacioacuten del geoide (distancia entre el elipsoide de referencia y el geoide) con estos tres paraacutemetros se obtiene la orientacioacuten del elipsoide el acimut geodeacutesico de una liacutenea y como condicioacuten que el semieje menor del elipsoide y el eje medio de rotacioacuten terrestre sean paralelos Ademaacutes se intenta que el elipsoide se ajuste lo maacuteximo posible a la zona a cartografiar de manera que la reduccioacuten de observaciones sea lo maacutes sencilla posible Un ejemplo de este tipo de sistemas es el ED-50 (European Datum de 1950) sistema al que estaacute referida toda la cartografiacutea espantildeola Este sistema adoptoacute el elipsoide de Hayford o Internacional introducido por la IUGG en su asamblea general de 1924 en Madrid donde a y f fueron obtenidas a partir de mediciones astronoacutemicas y geodeacutesicas en los Estados Unidos a = 6378388 f = 1297 Como punto fundamental se adoptoacute Potsdam lugar donde la desviacioacuten de la vertical (diferencia angular entre la vertical geodeacutesica y astronoacutemica) y la ondulacioacuten del geoide son conocidas (ξ = 3rdquo36 η = 1rdquo78 N = 0) de manera que el elipsoide queda orientado respecto a la Tierra Cabe destacar que fijar los valores de la desviacioacuten de la vertical (ξ η) y el valor de la ondulacioacuten del geoide N en el punto fundamental para orientar el elipsoide es equivalente a fijarlo a partir de las coordenadas X Y Z de su centro respecto al geocentro figura 12 La exactitud de ED50 oscila entre unos pocos metros en el centro de Europa a maacutes de 10 en el sur aunque su precisioacuten relativa es mucho mayor y maacutes que suficiente para los levantamientos cartograacuteficos de pequentildeas y medianas escalas por lo que en 1968 el Servicio Geograacutefico del ejeacutercito lo adopta para su cartografiacutea baacutesica 150000 e igualmente el IGN en 1979
14
25- Marco de referencia terrestre internacional (ITRF) El sistema de referencia terrestre internacional convencional se materializa a traveacutes de las coordenadas de una serie de estaciones distribuidas por todo el mundo en ese sistema de referencia constituyendo el ITRF (Internacional Terrestrial Reference Frame) establecido y mantenido por la IERS Baacutesicamente el sistema que materializa se define como geoceacutentrico (incluyendo la atmoacutesfera y los oceacuteanos) la base para la escala la constituye el metro (en el sistema Internacional) y con orientacioacuten de sus ejes tal como establecioacute la BIH en 1984
bull Eje Z Polo medio determinado por la IERS y llamado IERS Reference Pole (IRP) o Convencional Terrestrial Pole (CTP)
bull Eje X Meridiano de Greenwich Convencional determinado por la IERS y
llamado IERS Reference Meridian (IRM) o Greenwich Mean Origin (GMO)
bull Eje Y Formando una tripleta dextroacutegira con los ejes anteriores sobre el
plano del ecuador convencional El marco estaacute formado por coordenadas cartesianas y velocidades de una serie
de estaciones equipadas con teacutecnicas de observacioacuten espacial (VLBI SLR LLR GPS desde 1991 y DORIS desde 1994) en la figura 13 se pueden ver las estaciones para el ITRF2000 Si se desean coordenadas geodeacutesicas se recomienda el uso del elipsoide GRS80 Estas coordenadas definen impliacutecitamente el origen la escala y la orientacioacuten de los ejes coordenados X Y Z del sistema de referencia
La historia de los diferentes ITRF comenzoacute en 1984 y a partir de ahiacute se han obtenido las soluciones 88 89 90 91 92 93 94 96 97 2000 2005 y recientemente la 2008 estas soluciones difieren unas de otras debido a la incorporacioacuten constante de nuevas estaciones nuevas observaciones en las estaciones ya existentes mejora en la precisioacuten de las mismas o nuevos meacutetodos de procesamiento
Figura 12 Sistema geodeacutesico local
Geoide
Elipsoide
X
Y
Z
X
Y
Zo
XoYo
a
b
o
PNbull
bull
(ξ η)
15
Cada una de las teacutecnicas (GPS VLBI LLR SLR o DORIS) genera su propio marco de referencia k con coordenadas y velocidades conocidas para cada estacioacuten i en cada eacutepoca ts de observacioacuten por lo tanto las soluciones de las teacutecnicas se deben
combinar para estimar las posiciones y velocidades en el marco ITRF ( iITRFX y
i
ITRFXbull
) en una eacutepoca de referencia t0 para cada estacioacuten i asiacute como los paraacutemetros de transformacioacuten (factor de escala Dk vector de traslaciones Tk en X Y Z y matriz de
rotaciones Rk sobre los ejes X YZ) y sus variaciones ( KDbull
KTbull
KRbull
) entre el marco ITRF (marco final combinacioacuten de todos los k) y el correspondiente k paraacutemetros que a su vez pueden estar referidos a un eacutepoca tK diferente de las anteriores La combinacioacuten general se ajusta a las ecuaciones
( ) ( )( )
01
i i i i i i i i iks ITRF s ITRF k k ITRF k ITRF s k k ITRF k ITRF
i i i is ITRF k k ITRF k ITRF
X X t t X T D X R X t t T D X R X
X X T D X R X
bull bull bull bull
bull bull bull bull bull
= + minus + + + + minus + +
= + + + La segunda ecuacioacuten se obtiene a partir de derivar la primera y considerar que las derivadas segundas son nulas (aceleracioacuten nula) y que la derivada de i
ITRFX (sobre 10 centiacutemetros por antildeo como media) multiplicada por DK o RK (que son del orden de 10-5) tambieacuten se pueden despreciar Este sistema de ecuaciones es vaacutelido para
bull Observaciones bajo la forma de serie temporal de coordenadas (por ejemplo soluciones semanales para cada estacioacuten y por tanto en su correspondiente eacutepoca ts para una determinada teacutecnica espacial) por lo que la segunda ecuacioacuten (velocidad) del sistema (1) no se utiliza y donde la solucioacuten no es maacutes que la acumulacioacuten de eacutepocas de observacioacuten
bull Observaciones bajo la forma de paraacutemetros globales (coordenadas y
velocidades) vaacutelidos para un intervalo de tiempo elevado (varios antildeos) y
Figura 13 Estaciones que forman el ITRF2000 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
16
centrado en una eacutepoca tk (que puede coincidir o no con la t0 para cada una de las teacutecnicas espaciales)
La conexioacuten entre las diferentes teacutecnicas de observacioacuten se realiza en aquellas estaciones (collocation sites) que posean dos o maacutes teacutecnicas de observacioacuten y sea posible la determinacioacuten precisa (plusmn4-5 mm de error) de los incrementos de coordenadas X Y Z (local ties) entre los instrumentos de medida (receptores GPS o DORIS telescopios y radiotelescopios) utilizando mediciones topograacuteficas o con GPS En cada una de estas estaciones se genera una solucioacuten maacutes de acuerdo con las ecuaciones (1) teniendo en cuenta los incrementos de coordenadas es decir si una estacioacuten posee instrumental VLBI y SLR y se han medido las diferencias entre los dos instrumentos de forma precisa (incrementos de X Y Z) se genera una ecuacioacuten del tipo (1) para la solucioacuten VLBI otra para la SLR y otra con los incrementos observados (por ejemplo la solucioacuten VLBI maacutes los incrementos de manera que se estaacuten dando coordenadas en el marco VLBI a la estacioacuten SLR) El establecimiento de un marco de referencia de precisioacuten no es tarea sencilla ya que la Tierra sufre deformaciones debido a su caraacutecter elaacutestico y las precisiones de las observaciones son cada vez mayores por lo que las observaciones deben ser corregidas por los efectos de
bull Mareas terrestres bull Carga atmosfeacuterica y oceaacutenica
bull Tectoacutenica de placas El modelo utilizado hasta el ITRF2005 (incluido) es el
NNR-NUVEL-1A basado en que no existen rotaciones sobre el manto de las placas tectoacutenicas y por tanto la suma de las velocidades de las placas sobre toda la Tierra es cero Para el ITRF2008 se utiliza un modelo basado en las propias velocidades de las estaciones ITRF observadas con teacutecnicas espaciales el APKIM2005 (las velocidades presentan tambieacuten error ya que se obtienen a partir de caacutelculos)
bull Movimientos locales y regionales Un ejemplo seriacutea el rebote postglacial de
Escandinavia
Por tanto y tal como se pude ver en la tabla 3 el ITRF es un marco dinaacutemico que cambia de acuerdo a las variaciones temporales de las coordenadas y velocidades debido a los efectos anteriores
251- ITRF2000 ITRF2005 e ITRF2008
El marco ITRF2000 estaacute basado en 800 determinaciones en cerca de 500 sitios figura 13 estaacute referido a la eacutepoca 19970 (t0=19970) quedando determinado a partir de soluciones globales para cada marco k en una eacutepoca de referencia tk Para resolver el sistema de ecuaciones (1) es necesario fijar el datum de alguna manera el datum de la solucioacuten ITRF2000 quedoacute definido de la siguiente manera
bull Escala Media ponderada de determinadas medidas VLBI y SLR de alta
precisioacuten Esto se materializa fijando a cero el valor de escala y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 y las estaciones seleccionadas
bull Oriacutegen Media ponderada de determinaciones SLR (el centro de la oacuterbita de los
sateacutelites corresponderaacute al geocentro terrestre) Esto se materializa fijando a cero el valor del vector de traslacioacuten y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 las estaciones seleccionadas
17
bull Orientacioacuten Seleccioacuten de determinadas estaciones ITRF (sus coordenadas y velocidades) de alta calidad geodeacutesica que cumpla con los siguientes criterios
1 Que posea observaciones continuas al menos de los 3 uacuteltimos antildeos 2 Localizado en plataforma riacutegida y lejos de zonas de deformacioacuten 3 Que se haya determinado la velocidad con una precisioacuten mejor a
3mmantildeo 4 Que la velocidad sea menor a 3mmantildeo
Basado en estos criterios las 54 estaciones seleccionadas se pueden ver en la figura 14 como puntos azules En el sistema de ecuaciones (1) se introduce una ecuacioacuten de condicioacuten de forma que para estos puntos seleccionados exista correspondencia entre la orientacioacuten del marco de referencia y la del marco de referencia anterior (ITRF19970 por lo que no seraacuten maacutes que las definidas en la orientacioacuten BIH para 19840) La variacioacuten en la orientacioacuten (variacioacuten de estas coordenadas) seraacute la del modelo NNR-NUVEL-1A
El marco ITRF2005 referido a la eacutepoca 20000 (t0=20000) se ha basado
uacutenicamente en determinaciones SLR VLBI DORIS y GPS en 608 estaciones situadas en 338 localizaciones diferentes figura 15 quedando definido a partir de series temporales continuas de observaciones (soluciones semanales para GPS entre 1996 y 2005 DORIS entre 1993 y 2005 y SLR entre 1993 y 2005 y sesiones diarias para VLBI entre 1981 y 2005) de esta manera se puede realizar un anaacutelisis maacutes riguroso de las observaciones y detectar aquellas que presenten error o discontinuidades en las series Cada eacutepoca genera sistema de ecuaciones (1) para cada teacutecnica y en caso de que una estacioacuten presente una discontinuidad en la serie una nueva posicioacuten y velocidad se deben calcular para esa estacioacuten por lo que las coordenadas y velocidades calculadas lo seraacuten para un cierto intervalo de tiempo El datum se define de la siguiente manera
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20000) y variacioacuten nula
de estos paraacutemetros entre ITRF2005 y las series SLR bull Escala Factor de escala nulo (para la eacutepoca 20000) y variacioacuten nula entre
ITRF2005 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20000) y variaciones nulas entre ITRF2005 y ITRF2000 (en las estaciones ITRF seleccionadas)
Figura 14 En azul se muestran los 54 puntos de la ITRF que cumplen con los 4 criterios y en rojo los que cumplen con los criterios 1 3 y 4
18
En la tabla 1 se pueden ver los paraacutemetros de transformacioacuten entre el marco ITRF2005 y el ITRF2000 usando 70 estaciones especiacuteficas para su caacutelculo (las mismas que las utilizadas para orientar el ITRF2005 al ITRF2000 por lo que no existen paraacutemetros de rotacioacuten en esta transformacioacuten) Los resultados muestran las traslaciones del geocentro en miliacutemetros y el factor de escala en partes por billoacuten (con la notacioacuten americana es decir 10-9) asiacute como sus variaciones temporales (miliacutemetrosantildeo y ppbantildeo) Los resultados de la transformacioacuten muestran una variacioacuten temporal de 18 miliacutemetros por antildeo entre ITRF2005 e ITRF2000 esta velocidad de movimiento del geocentro no genera la estabilidad deseada del marco de referencia por lo que este marco se debe cambiar raacutepidamente Se cree que este movimiento se debe a la reduccioacuten de estaciones SLR con el tiempo asiacute como a su mala distribucioacuten geograacutefica (muchas maacutes en el hemisferio Norte que en el Sur) asiacute como la utilizacioacuten de diferentes modelos de procesamiento SLR para la solucioacuten ITRF2005 y la ITRF2000
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) 01 -08 -58 040 -02 01 -18 008
En base a esta uacuteltima conclusioacuten el marco ITRF2008 referido a la eacutepoca 20050 (t0=20050) se basa en el reprocesamiento de todas las series de observaciones de las cuatro teacutecnicas espaciales utilizadas (VLBI entre 1980 y 2009 GPSGNSS entre 1997 y 2009 SLR entre 1983 y 2009 DORIS entre 1993 y 2009) de manera que utilicen estaacutendares actuales e ideacutenticos y el mismo software para la reduccioacuten modelizacioacuten y correccioacuten de observaciones (modelos de troposfera e ionosfera centros de fase de emisioacuten de los sateacutelites y receptores etc) De esta manera el marco ITRF conservaraacute su definicioacuten a lo largo del tiempo en cuanto a origen escala y orientacioacuten (se produciraacuten series temporales de observaciones homogeacuteneas) por lo que los estudios de deformacioacuten dinaacutemica terrestre saldraacuten beneficiados (por ejemplo es esencial para el estudio del nivel medio del mar y su variacioacuten global y regional que el marco de referencia se defina siempre igual) 608 estaciones situadas en 338 localizaciones diferentes constituyen el marco El datum ITRF2008 se define de la siguiente manera
Figura 15 Estaciones que forman el ITRF2005 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
Tabla 1 Paraacutemetros de transformacioacuten entre los marcos ITRF2005 e ITRF2000 los paraacutemetros de rotacioacuten y sus variaciones son cero
19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

2
INDICE 1 Introduccioacutenhelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
2 Sistema de referencia terrestre geoceacutentrico convencionalhelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
21 Definicioacuten del sistemahelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 3
22 Sistemas de coordenadashelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 4
221 Coordenadas cartesianas y esfeacutericashelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 4
222 Sistema de coordenadas geograacuteficashelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 5
223 Sistema de coordenadas geodeacutesicas y geoceacutentricas Sistema de
referencia geodeacutesicohelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip
6
224 Sistema de coordenadas astronoacutemicas Sistema de referencia graviacuteficohellip 7
23 Movimiento del polo Coordenadas instantaacuteneas y absolutashelliphelliphelliphelliphelliphelliphelliphellip 8
24 Sistemas de referencia geodeacutesicoshelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 12
241 Sistemas de referencia geodeacutesicos globaleshelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 12
242 Sistemas de referencia geodeacutesicos localeshelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 13
25 Marco de referencia terrestre internacional (ITRF)helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 14
251 ITRF2000 ITRF2005 e ITRF 2008helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 16
252 Marco de referencia WGS84helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 19
253 Marco de referencia IGShelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 20
254 Sistema y marco de referencia terrestre europeo (ETRF89)helliphelliphelliphelliphelliphelliphellip 22
Bibliografiacuteahelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip 24
3
1- INTRODUCCIOacuteN Seraacute necesario un sistema de referencia terrestre para la determinacioacuten de coordenadas sobre la Tierra y para el estudio del movimiento y deformaciones de la corteza terrestre de manera que se convierte en una herramienta imprescindible en el desarrollo de las diferentes ciencias de la Tierra en especial de la Geodesia Geofiacutesica Geodinaacutemica Cartografiacutea Topografiacutea Navegacioacuten sobre la superficie terrestre y para la localizacioacuten de cualquier observacioacuten que se realice En primer lugar se deben distinguir los conceptos Sistema de referencia Sistema de referencia Convencional Marco de referencia y Sistema de Coordenadas
Sistema de referencia es una definicioacuten conceptual de teoriacuteas hipoacutetesis y constantes que permiten situar una tripleta de ejes coordenados en el espacio definiendo su origen y su orientacioacuten
Sistema de referencia convencional es un sistema de referencia donde todas las
constantes numeacutericas paraacutemetros e hipoacutetesis y teoriacuteas para el establecimiento del sistema de referencia son especificadas de modo concreto
Marco de referencia es la materializacioacuten de un sistema de referencia
convencional a traveacutes de observaciones es decir se trata de un conjunto de puntos (lugares localizados en la superficie terrestre) con coordenadas y velocidades conocidas en ese sistema de referencia convencional y que sirven para materializar en el espacio el sistema de referencia
Sistema de coordenadas es la parametrizacioacuten de las coordenadas de los
puntos que forman el marco de referencia En este sentido existen infinitos sistemas de coordenadas para parametrizar el marco de referencia por ejemplo las coordenadas (xyz) (φλH) (ENh) etc 2 SISTEMA DE REFERENCIA TERRESTRE GEOCEacuteNTRICO CONVENCIONAL
21- Definicioacuten del sistema Se utilizaraacuten unos ejes de coordenadas fijos sobre la Tierra es decir que giren con ella de manera que las coordenadas de un punto en principio seraacuten siempre las mismas Los convencionalismos que llevan el sistema de referencia a convencional son
bull Origen Centro de masas terrestres o geocentro incluyendo la atmoacutesfera y los oceacuteanos
bull Eje Z coincide con el eje de rotacioacuten terrestre
bull Plano meridiano pasa por cualquier punto de la tierra y contiene al eje de
rotacioacuten
bull Plano ecuador es perpendicular al eje de rotacioacuten y para por el geocentro
bull Eje X se situacutea en la direccioacuten del plano meridiano que pasa por Greenwich y contenido en el plano ecuador Es considerado internacionalmente como meridiano oriacutegen o meridiano cero desde 1884
bull Eje Y contenido en el plano ecuador y perpendicular al eje X y su sentido seraacute
tal que los tres ejes formen una tripleta dextroacutegira
4
P (XYZ)
XY
Z
P (XYZ)P (XYZ)P (XYZ)
XY
Z
P (XYZ)
XY
Z
φλ
r
P (XYZ)
XY
Z
P (XYZ)P (XYZ)P (XYZ)
XY
Z
φλ
r
22- Sistemas de coordenadas 221- Coordenadas cartesianas y esfeacutericas Cualquier punto de la superficie terrestre presentaraacute coordenadas (X Y Z) en la tripleta de ejes coordenados definida siendo estos puntos los que constituyen el marco de referencia figura 1
En cualquier caso es habitual el uso de coordenadas esfeacutericas para la
parametrizacioacuten de los puntos sobre la Tierra (rφλ) figura 2 donde de forma geneacuterica r es la distancia radial al geocentro φ la latitud geoceacutentrica (aacutengulo entre r y el plano del ecuador) y λ la longitud geoceacutentrica (aacutengulo entre el plano meridano de Greenwich y el del punto de caacutelculo medido en el plano del ecuador)
Figura 1 Sistema de coordenadas cartesianas
Figura 2 Sistema de coordenadas esfeacutericas
5
La relacioacuten entre las coordenadas esfeacutericas y las cartesianas es un producto de matrices correspondiente a la parametrizacioacuten regular de la esfera
=
ϕϕλϕλ
sensenr
ZYX
coscoscos
Para la correcta definicioacuten de la distancia radial r (distancia diferente para cada punto de la Tierra y que no sigue ninguacuten patroacuten geomeacutetrico exacto) se debe introducir una superficie de referencia como aproximacioacuten a la forma real de la Tierra 222- Sistema de coordenadas geograacuteficas En primera aproximacioacuten la Tierra es una esfera homogeacutenea de radio R
El eje de rotacioacuten corta la superficie terrestre en dos puntos el polo geograacutefico Norte (PN) y en el polo geograacutefico Sur (PS) El polo geograacutefico Norte es aquel desde el que si se observa la Tierra hacia su interior esta rota en el sentido contrario a las agujas del reloj figura 3
La vertical de cualquier punto sobre la superficie terrestre pasaraacute por el centro de la Tierra La posicioacuten de un punto E de la superficie de la Tierra se determina por dos coordenadas figura 4
bull Se llama latitud geograacutefica (φ) del punto E al aacutengulo que forma la vertical de E con el plano del ecuador terrestre La latitud geograacutefica variacutea de 0ordm a 90ordm en el hemisferio boreal (latitud norte) y de 0ordm a -90ordm en el hemisferio austral (latitud sur)
bull Se llama longitud geograacutefica (λ) del punto E al aacutengulo que forma el meridiano
del punto con el meridiano origen La longitud geograacutefica variacutea de 0ordm a 180ordm en
Figura 3 Aproximacioacuten esfeacuterica a la Tierra
6
el hemisferio oriental y de 0ordm a -180ordm en el hemisferio occidental es decir el primero al este y el segundo al oeste
223- Sistema de coordenadas geodeacutesicas y geoceacutentricas Sistema de referencia geodeacutesico La segunda aproximacioacuten a la forma de la Tierra es un elipsoide de revolucioacuten definido por su semieje mayor (a) y su semieje menor (b) o aplanamiento (f) El centro del elipsoide coincide con el centro del sistema de referencia es decir con el geocentro y el semieje menor se hace coincidir con el eje de rotacioacuten terrestre quedando asiacute constituido el sistema de coordenadas geodeacutesico
La vertical geodeacutesica en un punto de la superficie del elipsoide de revolucioacuten coincide con la direccioacuten del vector normal al elipsoide en dicho punto y por tanto no pasa por el centro del elipsoide figura 5
Asiacute las coordenadas geodeacutesicas seraacuten
bull Latitud geodeacutesica es el aacutengulo que forma la vertical geodeacutesica del punto con el
plano ecuador geodeacutesico
bull Longitud geodeacutesica es el aacutengulo formado por el meridiano geodeacutesico del punto de caacutelculo y el meridiano geodeacutesico origen
Introducimos en este momento las coordenadas geoceacutentricas ya que sobre el
elipsoide no coincidiraacuten con las geodeacutesicas en este caso la longitud geoceacutentrica seraacute igual a la geodeacutesica pero la latitud geoceacutentrica (β) seraacute el aacutengulo entre la liacutenea que une el centro del elipsoide y un punto sobre el elipsoide y el ecuador geodeacutesico
Figura 4 Coordenadas Geograacuteficas
7
ββ
224- Sistema de coordenadas astronoacutemicas Sistema de referencia graviacutefico Las observaciones astronoacutemicas geodeacutesicas y topograacuteficas se efectuacutean sobre la
superficie real de la Tierra y en un momento de tiempo determinado asiacute se debe retocar el concepto de figura y forma de la Tierra y pasar a la definicioacuten de geoide como figura y situar las observaciones en un momento determinado
El geoide se define como superficie equipotencial respecto a la gravedad y
normal a su direccioacuten siendo esta direccioacuten normal la de la fuerza de gravedad que seraacute la que sigue un rayo oacuteptico de un instrumento topograacutefico cuando se estaciona o liacutenea de la plomada Debido a la distribucioacuten no homogeacutenea de masas en el interior de la Tierra y a la forma achatada por los polos esta liacutenea no coincidiraacute ni con la vertical geograacutefica ni con la geodeacutesica ni con la geoceacutentrica figura 6 Asiacute se puede definir
bull Dado un punto P de la superficie topograacutefica terrestre se denomina vertical
astronoacutemica instantaacutenea de P a la recta tangente en P a la liacutenea de la plomada en ese punto
bull Se denomina plano ecuador astronoacutemico instantaacuteneo al plano perpendicular al
eje instantaacuteneo de rotacioacuten que pasa por el centro de masas de la Tierra
bull Se llama plano meridiano astronoacutemico instantaacuteneo de P al plano que contiene a la vertical astronoacutemica de P y al eje instantaacuteneo de rotacioacuten terrestre
Definieacutendose las coordenadas astronoacutemicas instantaacuteneas como
bull Latitud astronoacutemica de P es el aacutengulo Ф que forma la vertical astronoacutemica de P con el plano del ecuador astronoacutemico instantaacuteneo Variacutea de 0ordm a 90ordm en el hemisferio astronoacutemico norte y de 0ordm a -90ordm en el hemisferio astronoacutemico sur
bull Longitud astronoacutemica de P es el aacutengulo Λ que forma el plano meridiano
astronoacutemico instantaacuteneo de P con el plano meridiano astronoacutemico instantaacuteneo tomando como origen (Greenwich) Se suele considerar de 0ordm a 360ordm positiva al este
Figura 5 Coordenadas geodeacutesicas y geoceacutentricas
8
23- Movimiento del polo Coordenadas instantaacuteneas y absolutas
La direccioacuten del eje de rotacioacuten terrestre cambia con el tiempo respecto a la propia superficie terrestre y por tanto respecto al sistema de referencia geoceacutentrico terrestre
El polo describe a lo largo del tiempo una trayectoria libre que es una curva
maacutes o menos circular de radio 6 metros figura 7 y periodo aproximado de 430 diacuteas provocado por el caraacutecter deformable de la Tierra redistribuciones interiores de las masas terrestres efectos del rebote postglaciar en Canadaacute y Fenoscandia movimientos tectoacutenicos redistribuciones atmosfeacutericas etc figura 8
Superpuesta a eacutesta trayectoria libre se encuentran una serie de oscilaciones
forzadas provocadas por la influencia gravitatoria del Sol y la Luna con una magnitud de 60 centiacutemetros figura 7
Eje Instantaneo de Rotacioacuten
Meridiano Instantaneode Greenwich
Eje Z
Eje X
Eje YCentro de Masas
Liacutenea Vertical (Plomada)
Tangente a la vertical por el punto P
Vector de gravedad
Superficie equipotencial de P (WP)
P
Λ Φ
Eje Instantaneo de Rotacioacuten
Meridiano Instantaneode Greenwich
Eje Z
Eje X
Eje YCentro de Masas
Liacutenea Vertical (Plomada)
Tangente a la vertical por el punto P
Vector de gravedad
Superficie equipotencial de P (WP)
P
Λ Φ
Figura 6 Coordenadas Astronoacutemicas
9
Este movimiento del polo afecta directamente a las coordenadas de los puntos sobre la superficie terrestre ya que el sistema de referencia iraacute cambiando Lo maacutes indicado es tomar como eje Z de referencia el origen o centro de los ciacuterculos de movimiento libre quedando asiacute determinado el eje Z de un modo convencional Si las coordenadas de los puntos se refieren al polo convencional tendremos coordenadas absolutas si se refieren al polo instantaacuteneo (situacioacuten del eje de rotacioacuten en un determinado momento) tendremos coordenadas instantaacuteneas
No hay teoriacutea cientiacutefica que pueda predecir el movimiento del polo y por lo
tanto su posicioacuten asiacute que se monitoriza continuamente mediante observaciones Esta materializacioacuten se realizaba con observaciones astronoacutemicas lo que dio lugar al establecimiento de tres polos diferentes
bull Polo CIO desde 1899 la International Latitude Service (ILS) utilizando
observaciones astronoacutemicas sobre cinco estaciones en un mismo paralelo (φ = 39ordm 08rsquo) llegoacute a la definicioacuten del polo CIO (Convencional International Origen) definido como la posicioacuten media del polo entre 1900 y 1905 de manera que se obtuvieron determinaciones precisas de
6 m
60 cm
O
6 m
60 cm
O
Figura 7 Movimiento libre y oscilaciones forzadas que cuya suma describe el movimiento del polo
Figura 8 Causas del movimiento del polo
10
los largos periacuteodos del movimiento del polo (su situacioacuten antildeo a antildeo figura 9) La precisioacuten de estas determinaciones se cifroacute en 3 metros
bull Polo BIH (Bureau International de lrsquoHeure) Por otro lado el eje X del
sistema de referencia geoceacutentrico terrestre convencional se determinoacute a partir de las longitudes de 50 estaciones por la BIH creada en 1912 para mantener la escala de tiempo uniforme es decir era el organismo encargado del mantenimiento de la hora y de la posicioacuten del origen de longitudes (posicioacuten media del observatorio astronoacutemico de greenwich) a traveacutes de determinacioacuten de la longitud astronoacutemica de los observatorios pertenecientes a este organismo La determinacioacuten de la latitud de estos observatorios generoacute el polo BIH que proporcionaba estimaciones maacutes frecuentes (medias de 5 diacuteas) y precisiones de 1 metro en la determinacioacuten del movimiento del polo
bull Polo IPMS Cada vez con maacutes frecuencia se empezoacute a necesitar los
movimientos de corto periodo del polo para aplicaciones geodeacutesicas y astronoacutemicas figura 9 por lo que el ILS se reorganizoacute en 1962 en el Internacional Polar Motion Service (IPMS) asiacute surge el polo IPMS generado a partir de determinaciones de latitud astronoacutemica en 80 estaciones y con precisioacuten de un metro en la determinacioacuten del movimiento del polo
En 1967 el polo CIO es aceptado como estaacutendar por la International
Astronomical Union para dar asiacute continuidad a las observaciones maacutes antiguas eferidas al polo CIO por lo que los polos BIH e IPMS se intentan referenciar al polo CIO esto no es posible debido a las precisiones de los diferentes polos ya que se trata de la determinacioacuten de un ciacuterculo aproximadamente de 6 metros de diaacutemetro que queda definido con 3 metros de error en el polo CIO y con un metro en los otros dos es decir en realidad con estas precisiones se estaacute hablando del mismo polo
La situacioacuten se complica a partir de ese antildeo debido a la irrupcioacuten de la
geodesia por sateacutelite Se empiezan a utilizar medidas a sateacutelite para la determinacioacuten del movimiento del polo en concreto medidas Doppler a los sateacutelites de la constelacioacuten TRANSIT alcanzando precisiones de 02 metros
En los antildeos siguientes nuevas teacutecnicas espaciales demuestran la precisioacuten de
las mismas en la determinacioacuten del movimiento del polo medidas laacuteser a sateacutelites o a la Luna VLBI GPS DORIS PRARE Todas estas teacutecnicas se basan en la medicioacuten continua de coordenadas por lo que la monitorizacioacuten del polo es permanente y su precisioacuten se reduce hasta los 6-8 centiacutemetros
Figura 9 Movimientos de largo y corto periodo del polo
11
Asiacute en 1984 la BIH establecioacute un nuevo sistema de referencia terrestre basado
en las coordenadas cartesianas geoceacutentricas de las estaciones fundamentales donde teacutecnicas espaciales habiacutean sido aplicadas este nuevo sistema coincide con el polo CIO astronoacutemico si se tienen en cuanta las precisiones en la determinacioacuten del CIO lo cual permite dar continuidad a las coordenadas determinadas antiguamente
Finalmente en 1987 se creoacute la Internacional Earth Rotacion Service (IERS)
reemplazando a la BIH y a la IPMS para entre otras cosas monitorizar el movimiento del polo basaacutendose en teacutecnicas espaciales de forma continua (obtencioacuten del polo instantaacuteneo figura 10) con lo que el polo BIH determinado en 1984 pasoacute a llamarse polo IERS Desde abril de 2003 el nombre fue cambiado al de Internacional Earth Rotation and Reference Systems Service (IERS) proporcionando las coordenadas instantaacuteneas del polo para cada diacutea referidas al polo IERS cuyo eje X seraacute el meridiano de Greenwich convencional y el eje Y estaacute situado hacia el Oeste (direccioacuten de su sentido positivo) formando 90 grados las unidades de estas coordenadas son segundos de arco figura 11
En las paacuteginas httpwwwiersorg y httphpiersobspmfr se puede
encontrar mucha maacutes informacioacuten Como se ha dicho las mediciones se realizan en un momento determinado (t)
conociendo a traveacutes de los valores proporcionados por la IERS los valores para el movimiento del polo se podraacuten transformar los valores de latitud y longitud instantaacuteneos a valores de latitud y longitud absolutos sobre el sistema de referencia
Figura 10 Polo instantaacuteneo en lila y polo medio en amarillo
Figura 11 Sistema de referencia y coordenadas en las que se expresa el movimiento del polo
12
geoceacutentrico terrestre convencional Los valores de esta correccioacuten rondan los 01 segundos
24- Sistemas de referencia geodeacutesicos
241- Sistemas de referencia geodeacutesicos globales GRS80 y WGS84
Se definiraacute daacutetum como el conjunto de paraacutemetros que definen la posicioacuten de
un elipsoide respecto a la tierra Para determinarlo hace falta conocer la geometriacutea del elipsoide a y f su posicioacuten respecto al geocentro ∆X ∆Y ∆Z (coordenadas del centro del elipsoide respecto al geocentro) su orientacioacuten R1 R2 R3 (orientacioacuten de los ejes del elipsoide respecto a los terrestres) y la escala k
Si ∆X = ∆Y = ∆Z = 0 el daacutetum Geodeacutesico se llama Global o absoluto El Geodetic Reference System 1980 (GRS80) adoptado por la IUGG
(International Union of Geodesy and Geophysics) por su asamblea general de Camberra en 1979 pertenece a este grupo
Este sistema reemplaza al GRS67 por no representar adecuadamente el
tamantildeo forma y el campo gravitatorio con precisioacuten suficiente para la mayoriacutea de aplicaciones geodeacutesicas geofiacutesicas astronoacutemicas e hidrograacuteficas
Los principales paraacutemetros del sistema son
a = 6378137 m (Obtenido a partir de medidas SLR y Doppler) J2 = 10826310-8 (Obtenido a partir de perturbaciones en la oacuterbita de sateacutelites) GM = 3986005108 m3sg2 (Obtenido a partir de SLR LLR y pruebas espaciales) ω = 729311510-11 rdsg (Obtenido a partir de medidas astronoacutemicas) La orientacioacuten del eje Z seraacute la definida por el polo CIO como eje X el meridiano 0 definido por la BIH y el eje Y formando la tripleta dextroacutegira Este sistema sigue en vigor y no se ha actualizado en su definicioacuten ya que se debe tener en cuenta que por debajo del metro en la diferencia de paraacutemetros no existe una diferencia praacutectica en la determinacioacuten de coordenadas Asiacute las mejoras del mismo se consideran avances cientiacuteficos pero el estaacutendar (GRS80) no se debe cambiar
Cuando la informacioacuten sobre el datum se obtiene a partir de posiciones dentro de la oacuterbita de los sateacutelites (determinacioacuten dinaacutemica del sistema) los coeficientes del potencial gravitatorio (J2) asiacute como algunas constantes (ω velocidad de la luz constante gravitatoria geoceacutentrica) forman parte de la definicioacuten del datum ya que se calculan todas juntas
Un ejemplo de eacuteste uacuteltimo grupo es el World Geodetic System 1984 (WGS84)
utilizado por la teacutecnica GPS y obtenido exclusivamente a partir de los datos de la constelacioacuten de sateacutelites GPS
Los valores de sus principales paraacutemetros son
a = 6378137 m
J2 = 108262998310-8
GM = 3986004418108 m3sg2
13
ω = 729311510-11 rdsg
1f = 298257223563
El World Geodetic System 1984 (WGS84) utiliza como eje Z el polo IERS como eje X el meridiano 0 definido por el IERS y el eje Y formando la tripleta dextroacutegira Su origen coincide con el geocentro
A nivel praacutectico tal como se puede deducir el GRS80 y el WGS84 se pueden
considerar ideacutenticos 242- Sistemas de referencia geodeacutesicos locales ED50 Si ∆X ne ∆Y ne∆Z ne 0 nos encontramos ante un datum local El marco local queda definido por siete paraacutemetros (o mejor dicho 6 maacutes una condicioacuten) valores para a y f (geometriacutea del elipsoide) valores de las desviaciones de la vertical (ξ η) y de la ondulacioacuten del geoide (distancia entre el elipsoide de referencia y el geoide) con estos tres paraacutemetros se obtiene la orientacioacuten del elipsoide el acimut geodeacutesico de una liacutenea y como condicioacuten que el semieje menor del elipsoide y el eje medio de rotacioacuten terrestre sean paralelos Ademaacutes se intenta que el elipsoide se ajuste lo maacuteximo posible a la zona a cartografiar de manera que la reduccioacuten de observaciones sea lo maacutes sencilla posible Un ejemplo de este tipo de sistemas es el ED-50 (European Datum de 1950) sistema al que estaacute referida toda la cartografiacutea espantildeola Este sistema adoptoacute el elipsoide de Hayford o Internacional introducido por la IUGG en su asamblea general de 1924 en Madrid donde a y f fueron obtenidas a partir de mediciones astronoacutemicas y geodeacutesicas en los Estados Unidos a = 6378388 f = 1297 Como punto fundamental se adoptoacute Potsdam lugar donde la desviacioacuten de la vertical (diferencia angular entre la vertical geodeacutesica y astronoacutemica) y la ondulacioacuten del geoide son conocidas (ξ = 3rdquo36 η = 1rdquo78 N = 0) de manera que el elipsoide queda orientado respecto a la Tierra Cabe destacar que fijar los valores de la desviacioacuten de la vertical (ξ η) y el valor de la ondulacioacuten del geoide N en el punto fundamental para orientar el elipsoide es equivalente a fijarlo a partir de las coordenadas X Y Z de su centro respecto al geocentro figura 12 La exactitud de ED50 oscila entre unos pocos metros en el centro de Europa a maacutes de 10 en el sur aunque su precisioacuten relativa es mucho mayor y maacutes que suficiente para los levantamientos cartograacuteficos de pequentildeas y medianas escalas por lo que en 1968 el Servicio Geograacutefico del ejeacutercito lo adopta para su cartografiacutea baacutesica 150000 e igualmente el IGN en 1979
14
25- Marco de referencia terrestre internacional (ITRF) El sistema de referencia terrestre internacional convencional se materializa a traveacutes de las coordenadas de una serie de estaciones distribuidas por todo el mundo en ese sistema de referencia constituyendo el ITRF (Internacional Terrestrial Reference Frame) establecido y mantenido por la IERS Baacutesicamente el sistema que materializa se define como geoceacutentrico (incluyendo la atmoacutesfera y los oceacuteanos) la base para la escala la constituye el metro (en el sistema Internacional) y con orientacioacuten de sus ejes tal como establecioacute la BIH en 1984
bull Eje Z Polo medio determinado por la IERS y llamado IERS Reference Pole (IRP) o Convencional Terrestrial Pole (CTP)
bull Eje X Meridiano de Greenwich Convencional determinado por la IERS y
llamado IERS Reference Meridian (IRM) o Greenwich Mean Origin (GMO)
bull Eje Y Formando una tripleta dextroacutegira con los ejes anteriores sobre el
plano del ecuador convencional El marco estaacute formado por coordenadas cartesianas y velocidades de una serie
de estaciones equipadas con teacutecnicas de observacioacuten espacial (VLBI SLR LLR GPS desde 1991 y DORIS desde 1994) en la figura 13 se pueden ver las estaciones para el ITRF2000 Si se desean coordenadas geodeacutesicas se recomienda el uso del elipsoide GRS80 Estas coordenadas definen impliacutecitamente el origen la escala y la orientacioacuten de los ejes coordenados X Y Z del sistema de referencia
La historia de los diferentes ITRF comenzoacute en 1984 y a partir de ahiacute se han obtenido las soluciones 88 89 90 91 92 93 94 96 97 2000 2005 y recientemente la 2008 estas soluciones difieren unas de otras debido a la incorporacioacuten constante de nuevas estaciones nuevas observaciones en las estaciones ya existentes mejora en la precisioacuten de las mismas o nuevos meacutetodos de procesamiento
Figura 12 Sistema geodeacutesico local
Geoide
Elipsoide
X
Y
Z
X
Y
Zo
XoYo
a
b
o
PNbull
bull
(ξ η)
15
Cada una de las teacutecnicas (GPS VLBI LLR SLR o DORIS) genera su propio marco de referencia k con coordenadas y velocidades conocidas para cada estacioacuten i en cada eacutepoca ts de observacioacuten por lo tanto las soluciones de las teacutecnicas se deben
combinar para estimar las posiciones y velocidades en el marco ITRF ( iITRFX y
i
ITRFXbull
) en una eacutepoca de referencia t0 para cada estacioacuten i asiacute como los paraacutemetros de transformacioacuten (factor de escala Dk vector de traslaciones Tk en X Y Z y matriz de
rotaciones Rk sobre los ejes X YZ) y sus variaciones ( KDbull
KTbull
KRbull
) entre el marco ITRF (marco final combinacioacuten de todos los k) y el correspondiente k paraacutemetros que a su vez pueden estar referidos a un eacutepoca tK diferente de las anteriores La combinacioacuten general se ajusta a las ecuaciones
( ) ( )( )
01
i i i i i i i i iks ITRF s ITRF k k ITRF k ITRF s k k ITRF k ITRF
i i i is ITRF k k ITRF k ITRF
X X t t X T D X R X t t T D X R X
X X T D X R X
bull bull bull bull
bull bull bull bull bull
= + minus + + + + minus + +
= + + + La segunda ecuacioacuten se obtiene a partir de derivar la primera y considerar que las derivadas segundas son nulas (aceleracioacuten nula) y que la derivada de i
ITRFX (sobre 10 centiacutemetros por antildeo como media) multiplicada por DK o RK (que son del orden de 10-5) tambieacuten se pueden despreciar Este sistema de ecuaciones es vaacutelido para
bull Observaciones bajo la forma de serie temporal de coordenadas (por ejemplo soluciones semanales para cada estacioacuten y por tanto en su correspondiente eacutepoca ts para una determinada teacutecnica espacial) por lo que la segunda ecuacioacuten (velocidad) del sistema (1) no se utiliza y donde la solucioacuten no es maacutes que la acumulacioacuten de eacutepocas de observacioacuten
bull Observaciones bajo la forma de paraacutemetros globales (coordenadas y
velocidades) vaacutelidos para un intervalo de tiempo elevado (varios antildeos) y
Figura 13 Estaciones que forman el ITRF2000 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
16
centrado en una eacutepoca tk (que puede coincidir o no con la t0 para cada una de las teacutecnicas espaciales)
La conexioacuten entre las diferentes teacutecnicas de observacioacuten se realiza en aquellas estaciones (collocation sites) que posean dos o maacutes teacutecnicas de observacioacuten y sea posible la determinacioacuten precisa (plusmn4-5 mm de error) de los incrementos de coordenadas X Y Z (local ties) entre los instrumentos de medida (receptores GPS o DORIS telescopios y radiotelescopios) utilizando mediciones topograacuteficas o con GPS En cada una de estas estaciones se genera una solucioacuten maacutes de acuerdo con las ecuaciones (1) teniendo en cuenta los incrementos de coordenadas es decir si una estacioacuten posee instrumental VLBI y SLR y se han medido las diferencias entre los dos instrumentos de forma precisa (incrementos de X Y Z) se genera una ecuacioacuten del tipo (1) para la solucioacuten VLBI otra para la SLR y otra con los incrementos observados (por ejemplo la solucioacuten VLBI maacutes los incrementos de manera que se estaacuten dando coordenadas en el marco VLBI a la estacioacuten SLR) El establecimiento de un marco de referencia de precisioacuten no es tarea sencilla ya que la Tierra sufre deformaciones debido a su caraacutecter elaacutestico y las precisiones de las observaciones son cada vez mayores por lo que las observaciones deben ser corregidas por los efectos de
bull Mareas terrestres bull Carga atmosfeacuterica y oceaacutenica
bull Tectoacutenica de placas El modelo utilizado hasta el ITRF2005 (incluido) es el
NNR-NUVEL-1A basado en que no existen rotaciones sobre el manto de las placas tectoacutenicas y por tanto la suma de las velocidades de las placas sobre toda la Tierra es cero Para el ITRF2008 se utiliza un modelo basado en las propias velocidades de las estaciones ITRF observadas con teacutecnicas espaciales el APKIM2005 (las velocidades presentan tambieacuten error ya que se obtienen a partir de caacutelculos)
bull Movimientos locales y regionales Un ejemplo seriacutea el rebote postglacial de
Escandinavia
Por tanto y tal como se pude ver en la tabla 3 el ITRF es un marco dinaacutemico que cambia de acuerdo a las variaciones temporales de las coordenadas y velocidades debido a los efectos anteriores
251- ITRF2000 ITRF2005 e ITRF2008
El marco ITRF2000 estaacute basado en 800 determinaciones en cerca de 500 sitios figura 13 estaacute referido a la eacutepoca 19970 (t0=19970) quedando determinado a partir de soluciones globales para cada marco k en una eacutepoca de referencia tk Para resolver el sistema de ecuaciones (1) es necesario fijar el datum de alguna manera el datum de la solucioacuten ITRF2000 quedoacute definido de la siguiente manera
bull Escala Media ponderada de determinadas medidas VLBI y SLR de alta
precisioacuten Esto se materializa fijando a cero el valor de escala y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 y las estaciones seleccionadas
bull Oriacutegen Media ponderada de determinaciones SLR (el centro de la oacuterbita de los
sateacutelites corresponderaacute al geocentro terrestre) Esto se materializa fijando a cero el valor del vector de traslacioacuten y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 las estaciones seleccionadas
17
bull Orientacioacuten Seleccioacuten de determinadas estaciones ITRF (sus coordenadas y velocidades) de alta calidad geodeacutesica que cumpla con los siguientes criterios
1 Que posea observaciones continuas al menos de los 3 uacuteltimos antildeos 2 Localizado en plataforma riacutegida y lejos de zonas de deformacioacuten 3 Que se haya determinado la velocidad con una precisioacuten mejor a
3mmantildeo 4 Que la velocidad sea menor a 3mmantildeo
Basado en estos criterios las 54 estaciones seleccionadas se pueden ver en la figura 14 como puntos azules En el sistema de ecuaciones (1) se introduce una ecuacioacuten de condicioacuten de forma que para estos puntos seleccionados exista correspondencia entre la orientacioacuten del marco de referencia y la del marco de referencia anterior (ITRF19970 por lo que no seraacuten maacutes que las definidas en la orientacioacuten BIH para 19840) La variacioacuten en la orientacioacuten (variacioacuten de estas coordenadas) seraacute la del modelo NNR-NUVEL-1A
El marco ITRF2005 referido a la eacutepoca 20000 (t0=20000) se ha basado
uacutenicamente en determinaciones SLR VLBI DORIS y GPS en 608 estaciones situadas en 338 localizaciones diferentes figura 15 quedando definido a partir de series temporales continuas de observaciones (soluciones semanales para GPS entre 1996 y 2005 DORIS entre 1993 y 2005 y SLR entre 1993 y 2005 y sesiones diarias para VLBI entre 1981 y 2005) de esta manera se puede realizar un anaacutelisis maacutes riguroso de las observaciones y detectar aquellas que presenten error o discontinuidades en las series Cada eacutepoca genera sistema de ecuaciones (1) para cada teacutecnica y en caso de que una estacioacuten presente una discontinuidad en la serie una nueva posicioacuten y velocidad se deben calcular para esa estacioacuten por lo que las coordenadas y velocidades calculadas lo seraacuten para un cierto intervalo de tiempo El datum se define de la siguiente manera
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20000) y variacioacuten nula
de estos paraacutemetros entre ITRF2005 y las series SLR bull Escala Factor de escala nulo (para la eacutepoca 20000) y variacioacuten nula entre
ITRF2005 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20000) y variaciones nulas entre ITRF2005 y ITRF2000 (en las estaciones ITRF seleccionadas)
Figura 14 En azul se muestran los 54 puntos de la ITRF que cumplen con los 4 criterios y en rojo los que cumplen con los criterios 1 3 y 4
18
En la tabla 1 se pueden ver los paraacutemetros de transformacioacuten entre el marco ITRF2005 y el ITRF2000 usando 70 estaciones especiacuteficas para su caacutelculo (las mismas que las utilizadas para orientar el ITRF2005 al ITRF2000 por lo que no existen paraacutemetros de rotacioacuten en esta transformacioacuten) Los resultados muestran las traslaciones del geocentro en miliacutemetros y el factor de escala en partes por billoacuten (con la notacioacuten americana es decir 10-9) asiacute como sus variaciones temporales (miliacutemetrosantildeo y ppbantildeo) Los resultados de la transformacioacuten muestran una variacioacuten temporal de 18 miliacutemetros por antildeo entre ITRF2005 e ITRF2000 esta velocidad de movimiento del geocentro no genera la estabilidad deseada del marco de referencia por lo que este marco se debe cambiar raacutepidamente Se cree que este movimiento se debe a la reduccioacuten de estaciones SLR con el tiempo asiacute como a su mala distribucioacuten geograacutefica (muchas maacutes en el hemisferio Norte que en el Sur) asiacute como la utilizacioacuten de diferentes modelos de procesamiento SLR para la solucioacuten ITRF2005 y la ITRF2000
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) 01 -08 -58 040 -02 01 -18 008
En base a esta uacuteltima conclusioacuten el marco ITRF2008 referido a la eacutepoca 20050 (t0=20050) se basa en el reprocesamiento de todas las series de observaciones de las cuatro teacutecnicas espaciales utilizadas (VLBI entre 1980 y 2009 GPSGNSS entre 1997 y 2009 SLR entre 1983 y 2009 DORIS entre 1993 y 2009) de manera que utilicen estaacutendares actuales e ideacutenticos y el mismo software para la reduccioacuten modelizacioacuten y correccioacuten de observaciones (modelos de troposfera e ionosfera centros de fase de emisioacuten de los sateacutelites y receptores etc) De esta manera el marco ITRF conservaraacute su definicioacuten a lo largo del tiempo en cuanto a origen escala y orientacioacuten (se produciraacuten series temporales de observaciones homogeacuteneas) por lo que los estudios de deformacioacuten dinaacutemica terrestre saldraacuten beneficiados (por ejemplo es esencial para el estudio del nivel medio del mar y su variacioacuten global y regional que el marco de referencia se defina siempre igual) 608 estaciones situadas en 338 localizaciones diferentes constituyen el marco El datum ITRF2008 se define de la siguiente manera
Figura 15 Estaciones que forman el ITRF2005 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
Tabla 1 Paraacutemetros de transformacioacuten entre los marcos ITRF2005 e ITRF2000 los paraacutemetros de rotacioacuten y sus variaciones son cero
19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report
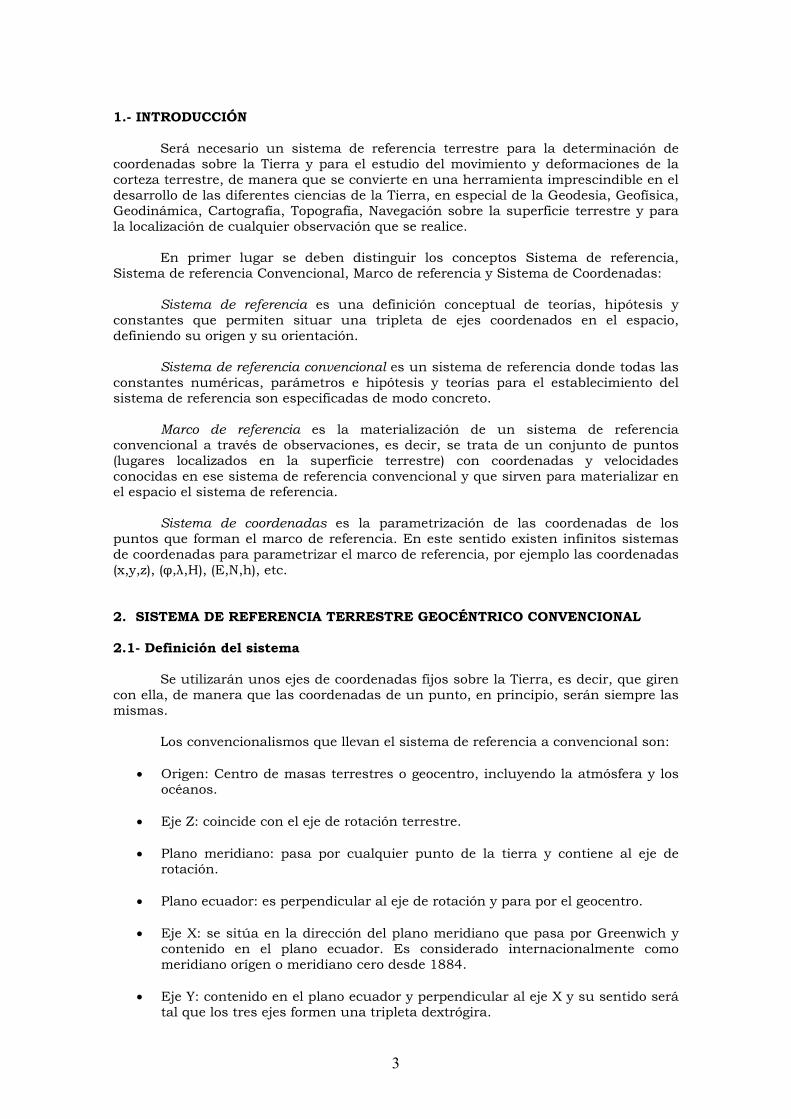
3
1- INTRODUCCIOacuteN Seraacute necesario un sistema de referencia terrestre para la determinacioacuten de coordenadas sobre la Tierra y para el estudio del movimiento y deformaciones de la corteza terrestre de manera que se convierte en una herramienta imprescindible en el desarrollo de las diferentes ciencias de la Tierra en especial de la Geodesia Geofiacutesica Geodinaacutemica Cartografiacutea Topografiacutea Navegacioacuten sobre la superficie terrestre y para la localizacioacuten de cualquier observacioacuten que se realice En primer lugar se deben distinguir los conceptos Sistema de referencia Sistema de referencia Convencional Marco de referencia y Sistema de Coordenadas
Sistema de referencia es una definicioacuten conceptual de teoriacuteas hipoacutetesis y constantes que permiten situar una tripleta de ejes coordenados en el espacio definiendo su origen y su orientacioacuten
Sistema de referencia convencional es un sistema de referencia donde todas las
constantes numeacutericas paraacutemetros e hipoacutetesis y teoriacuteas para el establecimiento del sistema de referencia son especificadas de modo concreto
Marco de referencia es la materializacioacuten de un sistema de referencia
convencional a traveacutes de observaciones es decir se trata de un conjunto de puntos (lugares localizados en la superficie terrestre) con coordenadas y velocidades conocidas en ese sistema de referencia convencional y que sirven para materializar en el espacio el sistema de referencia
Sistema de coordenadas es la parametrizacioacuten de las coordenadas de los
puntos que forman el marco de referencia En este sentido existen infinitos sistemas de coordenadas para parametrizar el marco de referencia por ejemplo las coordenadas (xyz) (φλH) (ENh) etc 2 SISTEMA DE REFERENCIA TERRESTRE GEOCEacuteNTRICO CONVENCIONAL
21- Definicioacuten del sistema Se utilizaraacuten unos ejes de coordenadas fijos sobre la Tierra es decir que giren con ella de manera que las coordenadas de un punto en principio seraacuten siempre las mismas Los convencionalismos que llevan el sistema de referencia a convencional son
bull Origen Centro de masas terrestres o geocentro incluyendo la atmoacutesfera y los oceacuteanos
bull Eje Z coincide con el eje de rotacioacuten terrestre
bull Plano meridiano pasa por cualquier punto de la tierra y contiene al eje de
rotacioacuten
bull Plano ecuador es perpendicular al eje de rotacioacuten y para por el geocentro
bull Eje X se situacutea en la direccioacuten del plano meridiano que pasa por Greenwich y contenido en el plano ecuador Es considerado internacionalmente como meridiano oriacutegen o meridiano cero desde 1884
bull Eje Y contenido en el plano ecuador y perpendicular al eje X y su sentido seraacute
tal que los tres ejes formen una tripleta dextroacutegira
4
P (XYZ)
XY
Z
P (XYZ)P (XYZ)P (XYZ)
XY
Z
P (XYZ)
XY
Z
φλ
r
P (XYZ)
XY
Z
P (XYZ)P (XYZ)P (XYZ)
XY
Z
φλ
r
22- Sistemas de coordenadas 221- Coordenadas cartesianas y esfeacutericas Cualquier punto de la superficie terrestre presentaraacute coordenadas (X Y Z) en la tripleta de ejes coordenados definida siendo estos puntos los que constituyen el marco de referencia figura 1
En cualquier caso es habitual el uso de coordenadas esfeacutericas para la
parametrizacioacuten de los puntos sobre la Tierra (rφλ) figura 2 donde de forma geneacuterica r es la distancia radial al geocentro φ la latitud geoceacutentrica (aacutengulo entre r y el plano del ecuador) y λ la longitud geoceacutentrica (aacutengulo entre el plano meridano de Greenwich y el del punto de caacutelculo medido en el plano del ecuador)
Figura 1 Sistema de coordenadas cartesianas
Figura 2 Sistema de coordenadas esfeacutericas
5
La relacioacuten entre las coordenadas esfeacutericas y las cartesianas es un producto de matrices correspondiente a la parametrizacioacuten regular de la esfera
=
ϕϕλϕλ
sensenr
ZYX
coscoscos
Para la correcta definicioacuten de la distancia radial r (distancia diferente para cada punto de la Tierra y que no sigue ninguacuten patroacuten geomeacutetrico exacto) se debe introducir una superficie de referencia como aproximacioacuten a la forma real de la Tierra 222- Sistema de coordenadas geograacuteficas En primera aproximacioacuten la Tierra es una esfera homogeacutenea de radio R
El eje de rotacioacuten corta la superficie terrestre en dos puntos el polo geograacutefico Norte (PN) y en el polo geograacutefico Sur (PS) El polo geograacutefico Norte es aquel desde el que si se observa la Tierra hacia su interior esta rota en el sentido contrario a las agujas del reloj figura 3
La vertical de cualquier punto sobre la superficie terrestre pasaraacute por el centro de la Tierra La posicioacuten de un punto E de la superficie de la Tierra se determina por dos coordenadas figura 4
bull Se llama latitud geograacutefica (φ) del punto E al aacutengulo que forma la vertical de E con el plano del ecuador terrestre La latitud geograacutefica variacutea de 0ordm a 90ordm en el hemisferio boreal (latitud norte) y de 0ordm a -90ordm en el hemisferio austral (latitud sur)
bull Se llama longitud geograacutefica (λ) del punto E al aacutengulo que forma el meridiano
del punto con el meridiano origen La longitud geograacutefica variacutea de 0ordm a 180ordm en
Figura 3 Aproximacioacuten esfeacuterica a la Tierra
6
el hemisferio oriental y de 0ordm a -180ordm en el hemisferio occidental es decir el primero al este y el segundo al oeste
223- Sistema de coordenadas geodeacutesicas y geoceacutentricas Sistema de referencia geodeacutesico La segunda aproximacioacuten a la forma de la Tierra es un elipsoide de revolucioacuten definido por su semieje mayor (a) y su semieje menor (b) o aplanamiento (f) El centro del elipsoide coincide con el centro del sistema de referencia es decir con el geocentro y el semieje menor se hace coincidir con el eje de rotacioacuten terrestre quedando asiacute constituido el sistema de coordenadas geodeacutesico
La vertical geodeacutesica en un punto de la superficie del elipsoide de revolucioacuten coincide con la direccioacuten del vector normal al elipsoide en dicho punto y por tanto no pasa por el centro del elipsoide figura 5
Asiacute las coordenadas geodeacutesicas seraacuten
bull Latitud geodeacutesica es el aacutengulo que forma la vertical geodeacutesica del punto con el
plano ecuador geodeacutesico
bull Longitud geodeacutesica es el aacutengulo formado por el meridiano geodeacutesico del punto de caacutelculo y el meridiano geodeacutesico origen
Introducimos en este momento las coordenadas geoceacutentricas ya que sobre el
elipsoide no coincidiraacuten con las geodeacutesicas en este caso la longitud geoceacutentrica seraacute igual a la geodeacutesica pero la latitud geoceacutentrica (β) seraacute el aacutengulo entre la liacutenea que une el centro del elipsoide y un punto sobre el elipsoide y el ecuador geodeacutesico
Figura 4 Coordenadas Geograacuteficas
7
ββ
224- Sistema de coordenadas astronoacutemicas Sistema de referencia graviacutefico Las observaciones astronoacutemicas geodeacutesicas y topograacuteficas se efectuacutean sobre la
superficie real de la Tierra y en un momento de tiempo determinado asiacute se debe retocar el concepto de figura y forma de la Tierra y pasar a la definicioacuten de geoide como figura y situar las observaciones en un momento determinado
El geoide se define como superficie equipotencial respecto a la gravedad y
normal a su direccioacuten siendo esta direccioacuten normal la de la fuerza de gravedad que seraacute la que sigue un rayo oacuteptico de un instrumento topograacutefico cuando se estaciona o liacutenea de la plomada Debido a la distribucioacuten no homogeacutenea de masas en el interior de la Tierra y a la forma achatada por los polos esta liacutenea no coincidiraacute ni con la vertical geograacutefica ni con la geodeacutesica ni con la geoceacutentrica figura 6 Asiacute se puede definir
bull Dado un punto P de la superficie topograacutefica terrestre se denomina vertical
astronoacutemica instantaacutenea de P a la recta tangente en P a la liacutenea de la plomada en ese punto
bull Se denomina plano ecuador astronoacutemico instantaacuteneo al plano perpendicular al
eje instantaacuteneo de rotacioacuten que pasa por el centro de masas de la Tierra
bull Se llama plano meridiano astronoacutemico instantaacuteneo de P al plano que contiene a la vertical astronoacutemica de P y al eje instantaacuteneo de rotacioacuten terrestre
Definieacutendose las coordenadas astronoacutemicas instantaacuteneas como
bull Latitud astronoacutemica de P es el aacutengulo Ф que forma la vertical astronoacutemica de P con el plano del ecuador astronoacutemico instantaacuteneo Variacutea de 0ordm a 90ordm en el hemisferio astronoacutemico norte y de 0ordm a -90ordm en el hemisferio astronoacutemico sur
bull Longitud astronoacutemica de P es el aacutengulo Λ que forma el plano meridiano
astronoacutemico instantaacuteneo de P con el plano meridiano astronoacutemico instantaacuteneo tomando como origen (Greenwich) Se suele considerar de 0ordm a 360ordm positiva al este
Figura 5 Coordenadas geodeacutesicas y geoceacutentricas
8
23- Movimiento del polo Coordenadas instantaacuteneas y absolutas
La direccioacuten del eje de rotacioacuten terrestre cambia con el tiempo respecto a la propia superficie terrestre y por tanto respecto al sistema de referencia geoceacutentrico terrestre
El polo describe a lo largo del tiempo una trayectoria libre que es una curva
maacutes o menos circular de radio 6 metros figura 7 y periodo aproximado de 430 diacuteas provocado por el caraacutecter deformable de la Tierra redistribuciones interiores de las masas terrestres efectos del rebote postglaciar en Canadaacute y Fenoscandia movimientos tectoacutenicos redistribuciones atmosfeacutericas etc figura 8
Superpuesta a eacutesta trayectoria libre se encuentran una serie de oscilaciones
forzadas provocadas por la influencia gravitatoria del Sol y la Luna con una magnitud de 60 centiacutemetros figura 7
Eje Instantaneo de Rotacioacuten
Meridiano Instantaneode Greenwich
Eje Z
Eje X
Eje YCentro de Masas
Liacutenea Vertical (Plomada)
Tangente a la vertical por el punto P
Vector de gravedad
Superficie equipotencial de P (WP)
P
Λ Φ
Eje Instantaneo de Rotacioacuten
Meridiano Instantaneode Greenwich
Eje Z
Eje X
Eje YCentro de Masas
Liacutenea Vertical (Plomada)
Tangente a la vertical por el punto P
Vector de gravedad
Superficie equipotencial de P (WP)
P
Λ Φ
Figura 6 Coordenadas Astronoacutemicas
9
Este movimiento del polo afecta directamente a las coordenadas de los puntos sobre la superficie terrestre ya que el sistema de referencia iraacute cambiando Lo maacutes indicado es tomar como eje Z de referencia el origen o centro de los ciacuterculos de movimiento libre quedando asiacute determinado el eje Z de un modo convencional Si las coordenadas de los puntos se refieren al polo convencional tendremos coordenadas absolutas si se refieren al polo instantaacuteneo (situacioacuten del eje de rotacioacuten en un determinado momento) tendremos coordenadas instantaacuteneas
No hay teoriacutea cientiacutefica que pueda predecir el movimiento del polo y por lo
tanto su posicioacuten asiacute que se monitoriza continuamente mediante observaciones Esta materializacioacuten se realizaba con observaciones astronoacutemicas lo que dio lugar al establecimiento de tres polos diferentes
bull Polo CIO desde 1899 la International Latitude Service (ILS) utilizando
observaciones astronoacutemicas sobre cinco estaciones en un mismo paralelo (φ = 39ordm 08rsquo) llegoacute a la definicioacuten del polo CIO (Convencional International Origen) definido como la posicioacuten media del polo entre 1900 y 1905 de manera que se obtuvieron determinaciones precisas de
6 m
60 cm
O
6 m
60 cm
O
Figura 7 Movimiento libre y oscilaciones forzadas que cuya suma describe el movimiento del polo
Figura 8 Causas del movimiento del polo
10
los largos periacuteodos del movimiento del polo (su situacioacuten antildeo a antildeo figura 9) La precisioacuten de estas determinaciones se cifroacute en 3 metros
bull Polo BIH (Bureau International de lrsquoHeure) Por otro lado el eje X del
sistema de referencia geoceacutentrico terrestre convencional se determinoacute a partir de las longitudes de 50 estaciones por la BIH creada en 1912 para mantener la escala de tiempo uniforme es decir era el organismo encargado del mantenimiento de la hora y de la posicioacuten del origen de longitudes (posicioacuten media del observatorio astronoacutemico de greenwich) a traveacutes de determinacioacuten de la longitud astronoacutemica de los observatorios pertenecientes a este organismo La determinacioacuten de la latitud de estos observatorios generoacute el polo BIH que proporcionaba estimaciones maacutes frecuentes (medias de 5 diacuteas) y precisiones de 1 metro en la determinacioacuten del movimiento del polo
bull Polo IPMS Cada vez con maacutes frecuencia se empezoacute a necesitar los
movimientos de corto periodo del polo para aplicaciones geodeacutesicas y astronoacutemicas figura 9 por lo que el ILS se reorganizoacute en 1962 en el Internacional Polar Motion Service (IPMS) asiacute surge el polo IPMS generado a partir de determinaciones de latitud astronoacutemica en 80 estaciones y con precisioacuten de un metro en la determinacioacuten del movimiento del polo
En 1967 el polo CIO es aceptado como estaacutendar por la International
Astronomical Union para dar asiacute continuidad a las observaciones maacutes antiguas eferidas al polo CIO por lo que los polos BIH e IPMS se intentan referenciar al polo CIO esto no es posible debido a las precisiones de los diferentes polos ya que se trata de la determinacioacuten de un ciacuterculo aproximadamente de 6 metros de diaacutemetro que queda definido con 3 metros de error en el polo CIO y con un metro en los otros dos es decir en realidad con estas precisiones se estaacute hablando del mismo polo
La situacioacuten se complica a partir de ese antildeo debido a la irrupcioacuten de la
geodesia por sateacutelite Se empiezan a utilizar medidas a sateacutelite para la determinacioacuten del movimiento del polo en concreto medidas Doppler a los sateacutelites de la constelacioacuten TRANSIT alcanzando precisiones de 02 metros
En los antildeos siguientes nuevas teacutecnicas espaciales demuestran la precisioacuten de
las mismas en la determinacioacuten del movimiento del polo medidas laacuteser a sateacutelites o a la Luna VLBI GPS DORIS PRARE Todas estas teacutecnicas se basan en la medicioacuten continua de coordenadas por lo que la monitorizacioacuten del polo es permanente y su precisioacuten se reduce hasta los 6-8 centiacutemetros
Figura 9 Movimientos de largo y corto periodo del polo
11
Asiacute en 1984 la BIH establecioacute un nuevo sistema de referencia terrestre basado
en las coordenadas cartesianas geoceacutentricas de las estaciones fundamentales donde teacutecnicas espaciales habiacutean sido aplicadas este nuevo sistema coincide con el polo CIO astronoacutemico si se tienen en cuanta las precisiones en la determinacioacuten del CIO lo cual permite dar continuidad a las coordenadas determinadas antiguamente
Finalmente en 1987 se creoacute la Internacional Earth Rotacion Service (IERS)
reemplazando a la BIH y a la IPMS para entre otras cosas monitorizar el movimiento del polo basaacutendose en teacutecnicas espaciales de forma continua (obtencioacuten del polo instantaacuteneo figura 10) con lo que el polo BIH determinado en 1984 pasoacute a llamarse polo IERS Desde abril de 2003 el nombre fue cambiado al de Internacional Earth Rotation and Reference Systems Service (IERS) proporcionando las coordenadas instantaacuteneas del polo para cada diacutea referidas al polo IERS cuyo eje X seraacute el meridiano de Greenwich convencional y el eje Y estaacute situado hacia el Oeste (direccioacuten de su sentido positivo) formando 90 grados las unidades de estas coordenadas son segundos de arco figura 11
En las paacuteginas httpwwwiersorg y httphpiersobspmfr se puede
encontrar mucha maacutes informacioacuten Como se ha dicho las mediciones se realizan en un momento determinado (t)
conociendo a traveacutes de los valores proporcionados por la IERS los valores para el movimiento del polo se podraacuten transformar los valores de latitud y longitud instantaacuteneos a valores de latitud y longitud absolutos sobre el sistema de referencia
Figura 10 Polo instantaacuteneo en lila y polo medio en amarillo
Figura 11 Sistema de referencia y coordenadas en las que se expresa el movimiento del polo
12
geoceacutentrico terrestre convencional Los valores de esta correccioacuten rondan los 01 segundos
24- Sistemas de referencia geodeacutesicos
241- Sistemas de referencia geodeacutesicos globales GRS80 y WGS84
Se definiraacute daacutetum como el conjunto de paraacutemetros que definen la posicioacuten de
un elipsoide respecto a la tierra Para determinarlo hace falta conocer la geometriacutea del elipsoide a y f su posicioacuten respecto al geocentro ∆X ∆Y ∆Z (coordenadas del centro del elipsoide respecto al geocentro) su orientacioacuten R1 R2 R3 (orientacioacuten de los ejes del elipsoide respecto a los terrestres) y la escala k
Si ∆X = ∆Y = ∆Z = 0 el daacutetum Geodeacutesico se llama Global o absoluto El Geodetic Reference System 1980 (GRS80) adoptado por la IUGG
(International Union of Geodesy and Geophysics) por su asamblea general de Camberra en 1979 pertenece a este grupo
Este sistema reemplaza al GRS67 por no representar adecuadamente el
tamantildeo forma y el campo gravitatorio con precisioacuten suficiente para la mayoriacutea de aplicaciones geodeacutesicas geofiacutesicas astronoacutemicas e hidrograacuteficas
Los principales paraacutemetros del sistema son
a = 6378137 m (Obtenido a partir de medidas SLR y Doppler) J2 = 10826310-8 (Obtenido a partir de perturbaciones en la oacuterbita de sateacutelites) GM = 3986005108 m3sg2 (Obtenido a partir de SLR LLR y pruebas espaciales) ω = 729311510-11 rdsg (Obtenido a partir de medidas astronoacutemicas) La orientacioacuten del eje Z seraacute la definida por el polo CIO como eje X el meridiano 0 definido por la BIH y el eje Y formando la tripleta dextroacutegira Este sistema sigue en vigor y no se ha actualizado en su definicioacuten ya que se debe tener en cuenta que por debajo del metro en la diferencia de paraacutemetros no existe una diferencia praacutectica en la determinacioacuten de coordenadas Asiacute las mejoras del mismo se consideran avances cientiacuteficos pero el estaacutendar (GRS80) no se debe cambiar
Cuando la informacioacuten sobre el datum se obtiene a partir de posiciones dentro de la oacuterbita de los sateacutelites (determinacioacuten dinaacutemica del sistema) los coeficientes del potencial gravitatorio (J2) asiacute como algunas constantes (ω velocidad de la luz constante gravitatoria geoceacutentrica) forman parte de la definicioacuten del datum ya que se calculan todas juntas
Un ejemplo de eacuteste uacuteltimo grupo es el World Geodetic System 1984 (WGS84)
utilizado por la teacutecnica GPS y obtenido exclusivamente a partir de los datos de la constelacioacuten de sateacutelites GPS
Los valores de sus principales paraacutemetros son
a = 6378137 m
J2 = 108262998310-8
GM = 3986004418108 m3sg2
13
ω = 729311510-11 rdsg
1f = 298257223563
El World Geodetic System 1984 (WGS84) utiliza como eje Z el polo IERS como eje X el meridiano 0 definido por el IERS y el eje Y formando la tripleta dextroacutegira Su origen coincide con el geocentro
A nivel praacutectico tal como se puede deducir el GRS80 y el WGS84 se pueden
considerar ideacutenticos 242- Sistemas de referencia geodeacutesicos locales ED50 Si ∆X ne ∆Y ne∆Z ne 0 nos encontramos ante un datum local El marco local queda definido por siete paraacutemetros (o mejor dicho 6 maacutes una condicioacuten) valores para a y f (geometriacutea del elipsoide) valores de las desviaciones de la vertical (ξ η) y de la ondulacioacuten del geoide (distancia entre el elipsoide de referencia y el geoide) con estos tres paraacutemetros se obtiene la orientacioacuten del elipsoide el acimut geodeacutesico de una liacutenea y como condicioacuten que el semieje menor del elipsoide y el eje medio de rotacioacuten terrestre sean paralelos Ademaacutes se intenta que el elipsoide se ajuste lo maacuteximo posible a la zona a cartografiar de manera que la reduccioacuten de observaciones sea lo maacutes sencilla posible Un ejemplo de este tipo de sistemas es el ED-50 (European Datum de 1950) sistema al que estaacute referida toda la cartografiacutea espantildeola Este sistema adoptoacute el elipsoide de Hayford o Internacional introducido por la IUGG en su asamblea general de 1924 en Madrid donde a y f fueron obtenidas a partir de mediciones astronoacutemicas y geodeacutesicas en los Estados Unidos a = 6378388 f = 1297 Como punto fundamental se adoptoacute Potsdam lugar donde la desviacioacuten de la vertical (diferencia angular entre la vertical geodeacutesica y astronoacutemica) y la ondulacioacuten del geoide son conocidas (ξ = 3rdquo36 η = 1rdquo78 N = 0) de manera que el elipsoide queda orientado respecto a la Tierra Cabe destacar que fijar los valores de la desviacioacuten de la vertical (ξ η) y el valor de la ondulacioacuten del geoide N en el punto fundamental para orientar el elipsoide es equivalente a fijarlo a partir de las coordenadas X Y Z de su centro respecto al geocentro figura 12 La exactitud de ED50 oscila entre unos pocos metros en el centro de Europa a maacutes de 10 en el sur aunque su precisioacuten relativa es mucho mayor y maacutes que suficiente para los levantamientos cartograacuteficos de pequentildeas y medianas escalas por lo que en 1968 el Servicio Geograacutefico del ejeacutercito lo adopta para su cartografiacutea baacutesica 150000 e igualmente el IGN en 1979
14
25- Marco de referencia terrestre internacional (ITRF) El sistema de referencia terrestre internacional convencional se materializa a traveacutes de las coordenadas de una serie de estaciones distribuidas por todo el mundo en ese sistema de referencia constituyendo el ITRF (Internacional Terrestrial Reference Frame) establecido y mantenido por la IERS Baacutesicamente el sistema que materializa se define como geoceacutentrico (incluyendo la atmoacutesfera y los oceacuteanos) la base para la escala la constituye el metro (en el sistema Internacional) y con orientacioacuten de sus ejes tal como establecioacute la BIH en 1984
bull Eje Z Polo medio determinado por la IERS y llamado IERS Reference Pole (IRP) o Convencional Terrestrial Pole (CTP)
bull Eje X Meridiano de Greenwich Convencional determinado por la IERS y
llamado IERS Reference Meridian (IRM) o Greenwich Mean Origin (GMO)
bull Eje Y Formando una tripleta dextroacutegira con los ejes anteriores sobre el
plano del ecuador convencional El marco estaacute formado por coordenadas cartesianas y velocidades de una serie
de estaciones equipadas con teacutecnicas de observacioacuten espacial (VLBI SLR LLR GPS desde 1991 y DORIS desde 1994) en la figura 13 se pueden ver las estaciones para el ITRF2000 Si se desean coordenadas geodeacutesicas se recomienda el uso del elipsoide GRS80 Estas coordenadas definen impliacutecitamente el origen la escala y la orientacioacuten de los ejes coordenados X Y Z del sistema de referencia
La historia de los diferentes ITRF comenzoacute en 1984 y a partir de ahiacute se han obtenido las soluciones 88 89 90 91 92 93 94 96 97 2000 2005 y recientemente la 2008 estas soluciones difieren unas de otras debido a la incorporacioacuten constante de nuevas estaciones nuevas observaciones en las estaciones ya existentes mejora en la precisioacuten de las mismas o nuevos meacutetodos de procesamiento
Figura 12 Sistema geodeacutesico local
Geoide
Elipsoide
X
Y
Z
X
Y
Zo
XoYo
a
b
o
PNbull
bull
(ξ η)
15
Cada una de las teacutecnicas (GPS VLBI LLR SLR o DORIS) genera su propio marco de referencia k con coordenadas y velocidades conocidas para cada estacioacuten i en cada eacutepoca ts de observacioacuten por lo tanto las soluciones de las teacutecnicas se deben
combinar para estimar las posiciones y velocidades en el marco ITRF ( iITRFX y
i
ITRFXbull
) en una eacutepoca de referencia t0 para cada estacioacuten i asiacute como los paraacutemetros de transformacioacuten (factor de escala Dk vector de traslaciones Tk en X Y Z y matriz de
rotaciones Rk sobre los ejes X YZ) y sus variaciones ( KDbull
KTbull
KRbull
) entre el marco ITRF (marco final combinacioacuten de todos los k) y el correspondiente k paraacutemetros que a su vez pueden estar referidos a un eacutepoca tK diferente de las anteriores La combinacioacuten general se ajusta a las ecuaciones
( ) ( )( )
01
i i i i i i i i iks ITRF s ITRF k k ITRF k ITRF s k k ITRF k ITRF
i i i is ITRF k k ITRF k ITRF
X X t t X T D X R X t t T D X R X
X X T D X R X
bull bull bull bull
bull bull bull bull bull
= + minus + + + + minus + +
= + + + La segunda ecuacioacuten se obtiene a partir de derivar la primera y considerar que las derivadas segundas son nulas (aceleracioacuten nula) y que la derivada de i
ITRFX (sobre 10 centiacutemetros por antildeo como media) multiplicada por DK o RK (que son del orden de 10-5) tambieacuten se pueden despreciar Este sistema de ecuaciones es vaacutelido para
bull Observaciones bajo la forma de serie temporal de coordenadas (por ejemplo soluciones semanales para cada estacioacuten y por tanto en su correspondiente eacutepoca ts para una determinada teacutecnica espacial) por lo que la segunda ecuacioacuten (velocidad) del sistema (1) no se utiliza y donde la solucioacuten no es maacutes que la acumulacioacuten de eacutepocas de observacioacuten
bull Observaciones bajo la forma de paraacutemetros globales (coordenadas y
velocidades) vaacutelidos para un intervalo de tiempo elevado (varios antildeos) y
Figura 13 Estaciones que forman el ITRF2000 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
16
centrado en una eacutepoca tk (que puede coincidir o no con la t0 para cada una de las teacutecnicas espaciales)
La conexioacuten entre las diferentes teacutecnicas de observacioacuten se realiza en aquellas estaciones (collocation sites) que posean dos o maacutes teacutecnicas de observacioacuten y sea posible la determinacioacuten precisa (plusmn4-5 mm de error) de los incrementos de coordenadas X Y Z (local ties) entre los instrumentos de medida (receptores GPS o DORIS telescopios y radiotelescopios) utilizando mediciones topograacuteficas o con GPS En cada una de estas estaciones se genera una solucioacuten maacutes de acuerdo con las ecuaciones (1) teniendo en cuenta los incrementos de coordenadas es decir si una estacioacuten posee instrumental VLBI y SLR y se han medido las diferencias entre los dos instrumentos de forma precisa (incrementos de X Y Z) se genera una ecuacioacuten del tipo (1) para la solucioacuten VLBI otra para la SLR y otra con los incrementos observados (por ejemplo la solucioacuten VLBI maacutes los incrementos de manera que se estaacuten dando coordenadas en el marco VLBI a la estacioacuten SLR) El establecimiento de un marco de referencia de precisioacuten no es tarea sencilla ya que la Tierra sufre deformaciones debido a su caraacutecter elaacutestico y las precisiones de las observaciones son cada vez mayores por lo que las observaciones deben ser corregidas por los efectos de
bull Mareas terrestres bull Carga atmosfeacuterica y oceaacutenica
bull Tectoacutenica de placas El modelo utilizado hasta el ITRF2005 (incluido) es el
NNR-NUVEL-1A basado en que no existen rotaciones sobre el manto de las placas tectoacutenicas y por tanto la suma de las velocidades de las placas sobre toda la Tierra es cero Para el ITRF2008 se utiliza un modelo basado en las propias velocidades de las estaciones ITRF observadas con teacutecnicas espaciales el APKIM2005 (las velocidades presentan tambieacuten error ya que se obtienen a partir de caacutelculos)
bull Movimientos locales y regionales Un ejemplo seriacutea el rebote postglacial de
Escandinavia
Por tanto y tal como se pude ver en la tabla 3 el ITRF es un marco dinaacutemico que cambia de acuerdo a las variaciones temporales de las coordenadas y velocidades debido a los efectos anteriores
251- ITRF2000 ITRF2005 e ITRF2008
El marco ITRF2000 estaacute basado en 800 determinaciones en cerca de 500 sitios figura 13 estaacute referido a la eacutepoca 19970 (t0=19970) quedando determinado a partir de soluciones globales para cada marco k en una eacutepoca de referencia tk Para resolver el sistema de ecuaciones (1) es necesario fijar el datum de alguna manera el datum de la solucioacuten ITRF2000 quedoacute definido de la siguiente manera
bull Escala Media ponderada de determinadas medidas VLBI y SLR de alta
precisioacuten Esto se materializa fijando a cero el valor de escala y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 y las estaciones seleccionadas
bull Oriacutegen Media ponderada de determinaciones SLR (el centro de la oacuterbita de los
sateacutelites corresponderaacute al geocentro terrestre) Esto se materializa fijando a cero el valor del vector de traslacioacuten y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 las estaciones seleccionadas
17
bull Orientacioacuten Seleccioacuten de determinadas estaciones ITRF (sus coordenadas y velocidades) de alta calidad geodeacutesica que cumpla con los siguientes criterios
1 Que posea observaciones continuas al menos de los 3 uacuteltimos antildeos 2 Localizado en plataforma riacutegida y lejos de zonas de deformacioacuten 3 Que se haya determinado la velocidad con una precisioacuten mejor a
3mmantildeo 4 Que la velocidad sea menor a 3mmantildeo
Basado en estos criterios las 54 estaciones seleccionadas se pueden ver en la figura 14 como puntos azules En el sistema de ecuaciones (1) se introduce una ecuacioacuten de condicioacuten de forma que para estos puntos seleccionados exista correspondencia entre la orientacioacuten del marco de referencia y la del marco de referencia anterior (ITRF19970 por lo que no seraacuten maacutes que las definidas en la orientacioacuten BIH para 19840) La variacioacuten en la orientacioacuten (variacioacuten de estas coordenadas) seraacute la del modelo NNR-NUVEL-1A
El marco ITRF2005 referido a la eacutepoca 20000 (t0=20000) se ha basado
uacutenicamente en determinaciones SLR VLBI DORIS y GPS en 608 estaciones situadas en 338 localizaciones diferentes figura 15 quedando definido a partir de series temporales continuas de observaciones (soluciones semanales para GPS entre 1996 y 2005 DORIS entre 1993 y 2005 y SLR entre 1993 y 2005 y sesiones diarias para VLBI entre 1981 y 2005) de esta manera se puede realizar un anaacutelisis maacutes riguroso de las observaciones y detectar aquellas que presenten error o discontinuidades en las series Cada eacutepoca genera sistema de ecuaciones (1) para cada teacutecnica y en caso de que una estacioacuten presente una discontinuidad en la serie una nueva posicioacuten y velocidad se deben calcular para esa estacioacuten por lo que las coordenadas y velocidades calculadas lo seraacuten para un cierto intervalo de tiempo El datum se define de la siguiente manera
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20000) y variacioacuten nula
de estos paraacutemetros entre ITRF2005 y las series SLR bull Escala Factor de escala nulo (para la eacutepoca 20000) y variacioacuten nula entre
ITRF2005 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20000) y variaciones nulas entre ITRF2005 y ITRF2000 (en las estaciones ITRF seleccionadas)
Figura 14 En azul se muestran los 54 puntos de la ITRF que cumplen con los 4 criterios y en rojo los que cumplen con los criterios 1 3 y 4
18
En la tabla 1 se pueden ver los paraacutemetros de transformacioacuten entre el marco ITRF2005 y el ITRF2000 usando 70 estaciones especiacuteficas para su caacutelculo (las mismas que las utilizadas para orientar el ITRF2005 al ITRF2000 por lo que no existen paraacutemetros de rotacioacuten en esta transformacioacuten) Los resultados muestran las traslaciones del geocentro en miliacutemetros y el factor de escala en partes por billoacuten (con la notacioacuten americana es decir 10-9) asiacute como sus variaciones temporales (miliacutemetrosantildeo y ppbantildeo) Los resultados de la transformacioacuten muestran una variacioacuten temporal de 18 miliacutemetros por antildeo entre ITRF2005 e ITRF2000 esta velocidad de movimiento del geocentro no genera la estabilidad deseada del marco de referencia por lo que este marco se debe cambiar raacutepidamente Se cree que este movimiento se debe a la reduccioacuten de estaciones SLR con el tiempo asiacute como a su mala distribucioacuten geograacutefica (muchas maacutes en el hemisferio Norte que en el Sur) asiacute como la utilizacioacuten de diferentes modelos de procesamiento SLR para la solucioacuten ITRF2005 y la ITRF2000
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) 01 -08 -58 040 -02 01 -18 008
En base a esta uacuteltima conclusioacuten el marco ITRF2008 referido a la eacutepoca 20050 (t0=20050) se basa en el reprocesamiento de todas las series de observaciones de las cuatro teacutecnicas espaciales utilizadas (VLBI entre 1980 y 2009 GPSGNSS entre 1997 y 2009 SLR entre 1983 y 2009 DORIS entre 1993 y 2009) de manera que utilicen estaacutendares actuales e ideacutenticos y el mismo software para la reduccioacuten modelizacioacuten y correccioacuten de observaciones (modelos de troposfera e ionosfera centros de fase de emisioacuten de los sateacutelites y receptores etc) De esta manera el marco ITRF conservaraacute su definicioacuten a lo largo del tiempo en cuanto a origen escala y orientacioacuten (se produciraacuten series temporales de observaciones homogeacuteneas) por lo que los estudios de deformacioacuten dinaacutemica terrestre saldraacuten beneficiados (por ejemplo es esencial para el estudio del nivel medio del mar y su variacioacuten global y regional que el marco de referencia se defina siempre igual) 608 estaciones situadas en 338 localizaciones diferentes constituyen el marco El datum ITRF2008 se define de la siguiente manera
Figura 15 Estaciones que forman el ITRF2005 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
Tabla 1 Paraacutemetros de transformacioacuten entre los marcos ITRF2005 e ITRF2000 los paraacutemetros de rotacioacuten y sus variaciones son cero
19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report
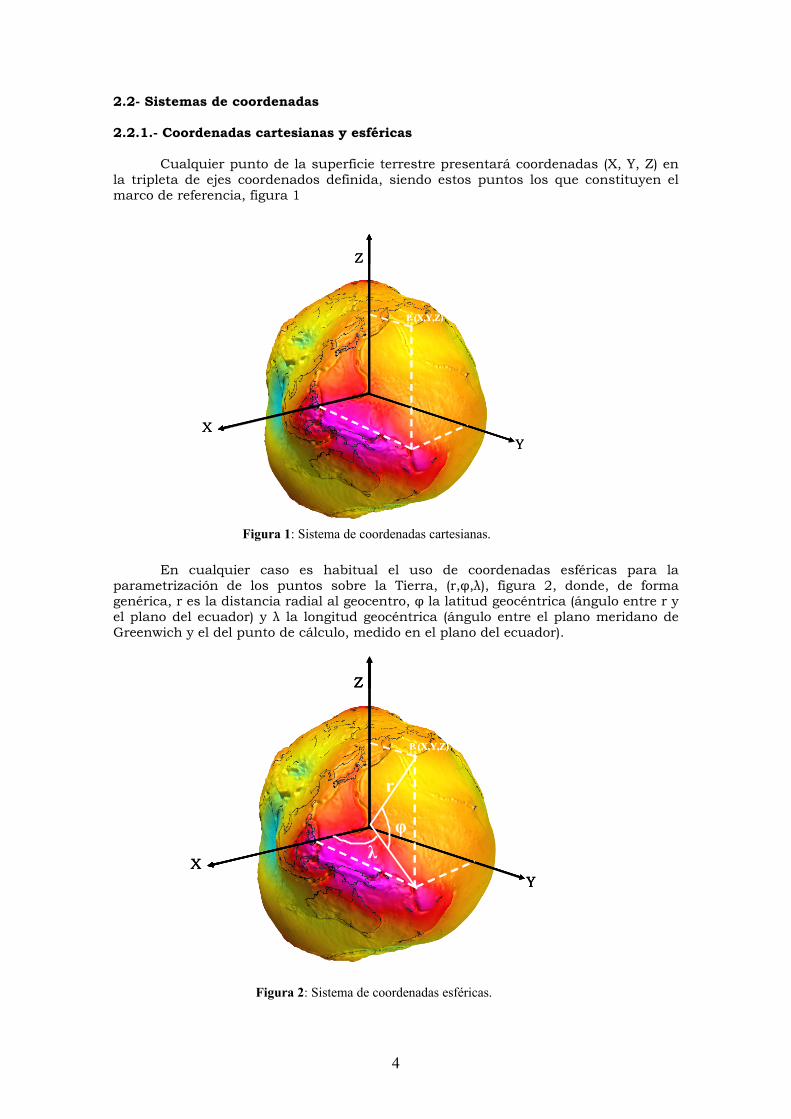
4
P (XYZ)
XY
Z
P (XYZ)P (XYZ)P (XYZ)
XY
Z
P (XYZ)
XY
Z
φλ
r
P (XYZ)
XY
Z
P (XYZ)P (XYZ)P (XYZ)
XY
Z
φλ
r
22- Sistemas de coordenadas 221- Coordenadas cartesianas y esfeacutericas Cualquier punto de la superficie terrestre presentaraacute coordenadas (X Y Z) en la tripleta de ejes coordenados definida siendo estos puntos los que constituyen el marco de referencia figura 1
En cualquier caso es habitual el uso de coordenadas esfeacutericas para la
parametrizacioacuten de los puntos sobre la Tierra (rφλ) figura 2 donde de forma geneacuterica r es la distancia radial al geocentro φ la latitud geoceacutentrica (aacutengulo entre r y el plano del ecuador) y λ la longitud geoceacutentrica (aacutengulo entre el plano meridano de Greenwich y el del punto de caacutelculo medido en el plano del ecuador)
Figura 1 Sistema de coordenadas cartesianas
Figura 2 Sistema de coordenadas esfeacutericas
5
La relacioacuten entre las coordenadas esfeacutericas y las cartesianas es un producto de matrices correspondiente a la parametrizacioacuten regular de la esfera
=
ϕϕλϕλ
sensenr
ZYX
coscoscos
Para la correcta definicioacuten de la distancia radial r (distancia diferente para cada punto de la Tierra y que no sigue ninguacuten patroacuten geomeacutetrico exacto) se debe introducir una superficie de referencia como aproximacioacuten a la forma real de la Tierra 222- Sistema de coordenadas geograacuteficas En primera aproximacioacuten la Tierra es una esfera homogeacutenea de radio R
El eje de rotacioacuten corta la superficie terrestre en dos puntos el polo geograacutefico Norte (PN) y en el polo geograacutefico Sur (PS) El polo geograacutefico Norte es aquel desde el que si se observa la Tierra hacia su interior esta rota en el sentido contrario a las agujas del reloj figura 3
La vertical de cualquier punto sobre la superficie terrestre pasaraacute por el centro de la Tierra La posicioacuten de un punto E de la superficie de la Tierra se determina por dos coordenadas figura 4
bull Se llama latitud geograacutefica (φ) del punto E al aacutengulo que forma la vertical de E con el plano del ecuador terrestre La latitud geograacutefica variacutea de 0ordm a 90ordm en el hemisferio boreal (latitud norte) y de 0ordm a -90ordm en el hemisferio austral (latitud sur)
bull Se llama longitud geograacutefica (λ) del punto E al aacutengulo que forma el meridiano
del punto con el meridiano origen La longitud geograacutefica variacutea de 0ordm a 180ordm en
Figura 3 Aproximacioacuten esfeacuterica a la Tierra
6
el hemisferio oriental y de 0ordm a -180ordm en el hemisferio occidental es decir el primero al este y el segundo al oeste
223- Sistema de coordenadas geodeacutesicas y geoceacutentricas Sistema de referencia geodeacutesico La segunda aproximacioacuten a la forma de la Tierra es un elipsoide de revolucioacuten definido por su semieje mayor (a) y su semieje menor (b) o aplanamiento (f) El centro del elipsoide coincide con el centro del sistema de referencia es decir con el geocentro y el semieje menor se hace coincidir con el eje de rotacioacuten terrestre quedando asiacute constituido el sistema de coordenadas geodeacutesico
La vertical geodeacutesica en un punto de la superficie del elipsoide de revolucioacuten coincide con la direccioacuten del vector normal al elipsoide en dicho punto y por tanto no pasa por el centro del elipsoide figura 5
Asiacute las coordenadas geodeacutesicas seraacuten
bull Latitud geodeacutesica es el aacutengulo que forma la vertical geodeacutesica del punto con el
plano ecuador geodeacutesico
bull Longitud geodeacutesica es el aacutengulo formado por el meridiano geodeacutesico del punto de caacutelculo y el meridiano geodeacutesico origen
Introducimos en este momento las coordenadas geoceacutentricas ya que sobre el
elipsoide no coincidiraacuten con las geodeacutesicas en este caso la longitud geoceacutentrica seraacute igual a la geodeacutesica pero la latitud geoceacutentrica (β) seraacute el aacutengulo entre la liacutenea que une el centro del elipsoide y un punto sobre el elipsoide y el ecuador geodeacutesico
Figura 4 Coordenadas Geograacuteficas
7
ββ
224- Sistema de coordenadas astronoacutemicas Sistema de referencia graviacutefico Las observaciones astronoacutemicas geodeacutesicas y topograacuteficas se efectuacutean sobre la
superficie real de la Tierra y en un momento de tiempo determinado asiacute se debe retocar el concepto de figura y forma de la Tierra y pasar a la definicioacuten de geoide como figura y situar las observaciones en un momento determinado
El geoide se define como superficie equipotencial respecto a la gravedad y
normal a su direccioacuten siendo esta direccioacuten normal la de la fuerza de gravedad que seraacute la que sigue un rayo oacuteptico de un instrumento topograacutefico cuando se estaciona o liacutenea de la plomada Debido a la distribucioacuten no homogeacutenea de masas en el interior de la Tierra y a la forma achatada por los polos esta liacutenea no coincidiraacute ni con la vertical geograacutefica ni con la geodeacutesica ni con la geoceacutentrica figura 6 Asiacute se puede definir
bull Dado un punto P de la superficie topograacutefica terrestre se denomina vertical
astronoacutemica instantaacutenea de P a la recta tangente en P a la liacutenea de la plomada en ese punto
bull Se denomina plano ecuador astronoacutemico instantaacuteneo al plano perpendicular al
eje instantaacuteneo de rotacioacuten que pasa por el centro de masas de la Tierra
bull Se llama plano meridiano astronoacutemico instantaacuteneo de P al plano que contiene a la vertical astronoacutemica de P y al eje instantaacuteneo de rotacioacuten terrestre
Definieacutendose las coordenadas astronoacutemicas instantaacuteneas como
bull Latitud astronoacutemica de P es el aacutengulo Ф que forma la vertical astronoacutemica de P con el plano del ecuador astronoacutemico instantaacuteneo Variacutea de 0ordm a 90ordm en el hemisferio astronoacutemico norte y de 0ordm a -90ordm en el hemisferio astronoacutemico sur
bull Longitud astronoacutemica de P es el aacutengulo Λ que forma el plano meridiano
astronoacutemico instantaacuteneo de P con el plano meridiano astronoacutemico instantaacuteneo tomando como origen (Greenwich) Se suele considerar de 0ordm a 360ordm positiva al este
Figura 5 Coordenadas geodeacutesicas y geoceacutentricas
8
23- Movimiento del polo Coordenadas instantaacuteneas y absolutas
La direccioacuten del eje de rotacioacuten terrestre cambia con el tiempo respecto a la propia superficie terrestre y por tanto respecto al sistema de referencia geoceacutentrico terrestre
El polo describe a lo largo del tiempo una trayectoria libre que es una curva
maacutes o menos circular de radio 6 metros figura 7 y periodo aproximado de 430 diacuteas provocado por el caraacutecter deformable de la Tierra redistribuciones interiores de las masas terrestres efectos del rebote postglaciar en Canadaacute y Fenoscandia movimientos tectoacutenicos redistribuciones atmosfeacutericas etc figura 8
Superpuesta a eacutesta trayectoria libre se encuentran una serie de oscilaciones
forzadas provocadas por la influencia gravitatoria del Sol y la Luna con una magnitud de 60 centiacutemetros figura 7
Eje Instantaneo de Rotacioacuten
Meridiano Instantaneode Greenwich
Eje Z
Eje X
Eje YCentro de Masas
Liacutenea Vertical (Plomada)
Tangente a la vertical por el punto P
Vector de gravedad
Superficie equipotencial de P (WP)
P
Λ Φ
Eje Instantaneo de Rotacioacuten
Meridiano Instantaneode Greenwich
Eje Z
Eje X
Eje YCentro de Masas
Liacutenea Vertical (Plomada)
Tangente a la vertical por el punto P
Vector de gravedad
Superficie equipotencial de P (WP)
P
Λ Φ
Figura 6 Coordenadas Astronoacutemicas
9
Este movimiento del polo afecta directamente a las coordenadas de los puntos sobre la superficie terrestre ya que el sistema de referencia iraacute cambiando Lo maacutes indicado es tomar como eje Z de referencia el origen o centro de los ciacuterculos de movimiento libre quedando asiacute determinado el eje Z de un modo convencional Si las coordenadas de los puntos se refieren al polo convencional tendremos coordenadas absolutas si se refieren al polo instantaacuteneo (situacioacuten del eje de rotacioacuten en un determinado momento) tendremos coordenadas instantaacuteneas
No hay teoriacutea cientiacutefica que pueda predecir el movimiento del polo y por lo
tanto su posicioacuten asiacute que se monitoriza continuamente mediante observaciones Esta materializacioacuten se realizaba con observaciones astronoacutemicas lo que dio lugar al establecimiento de tres polos diferentes
bull Polo CIO desde 1899 la International Latitude Service (ILS) utilizando
observaciones astronoacutemicas sobre cinco estaciones en un mismo paralelo (φ = 39ordm 08rsquo) llegoacute a la definicioacuten del polo CIO (Convencional International Origen) definido como la posicioacuten media del polo entre 1900 y 1905 de manera que se obtuvieron determinaciones precisas de
6 m
60 cm
O
6 m
60 cm
O
Figura 7 Movimiento libre y oscilaciones forzadas que cuya suma describe el movimiento del polo
Figura 8 Causas del movimiento del polo
10
los largos periacuteodos del movimiento del polo (su situacioacuten antildeo a antildeo figura 9) La precisioacuten de estas determinaciones se cifroacute en 3 metros
bull Polo BIH (Bureau International de lrsquoHeure) Por otro lado el eje X del
sistema de referencia geoceacutentrico terrestre convencional se determinoacute a partir de las longitudes de 50 estaciones por la BIH creada en 1912 para mantener la escala de tiempo uniforme es decir era el organismo encargado del mantenimiento de la hora y de la posicioacuten del origen de longitudes (posicioacuten media del observatorio astronoacutemico de greenwich) a traveacutes de determinacioacuten de la longitud astronoacutemica de los observatorios pertenecientes a este organismo La determinacioacuten de la latitud de estos observatorios generoacute el polo BIH que proporcionaba estimaciones maacutes frecuentes (medias de 5 diacuteas) y precisiones de 1 metro en la determinacioacuten del movimiento del polo
bull Polo IPMS Cada vez con maacutes frecuencia se empezoacute a necesitar los
movimientos de corto periodo del polo para aplicaciones geodeacutesicas y astronoacutemicas figura 9 por lo que el ILS se reorganizoacute en 1962 en el Internacional Polar Motion Service (IPMS) asiacute surge el polo IPMS generado a partir de determinaciones de latitud astronoacutemica en 80 estaciones y con precisioacuten de un metro en la determinacioacuten del movimiento del polo
En 1967 el polo CIO es aceptado como estaacutendar por la International
Astronomical Union para dar asiacute continuidad a las observaciones maacutes antiguas eferidas al polo CIO por lo que los polos BIH e IPMS se intentan referenciar al polo CIO esto no es posible debido a las precisiones de los diferentes polos ya que se trata de la determinacioacuten de un ciacuterculo aproximadamente de 6 metros de diaacutemetro que queda definido con 3 metros de error en el polo CIO y con un metro en los otros dos es decir en realidad con estas precisiones se estaacute hablando del mismo polo
La situacioacuten se complica a partir de ese antildeo debido a la irrupcioacuten de la
geodesia por sateacutelite Se empiezan a utilizar medidas a sateacutelite para la determinacioacuten del movimiento del polo en concreto medidas Doppler a los sateacutelites de la constelacioacuten TRANSIT alcanzando precisiones de 02 metros
En los antildeos siguientes nuevas teacutecnicas espaciales demuestran la precisioacuten de
las mismas en la determinacioacuten del movimiento del polo medidas laacuteser a sateacutelites o a la Luna VLBI GPS DORIS PRARE Todas estas teacutecnicas se basan en la medicioacuten continua de coordenadas por lo que la monitorizacioacuten del polo es permanente y su precisioacuten se reduce hasta los 6-8 centiacutemetros
Figura 9 Movimientos de largo y corto periodo del polo
11
Asiacute en 1984 la BIH establecioacute un nuevo sistema de referencia terrestre basado
en las coordenadas cartesianas geoceacutentricas de las estaciones fundamentales donde teacutecnicas espaciales habiacutean sido aplicadas este nuevo sistema coincide con el polo CIO astronoacutemico si se tienen en cuanta las precisiones en la determinacioacuten del CIO lo cual permite dar continuidad a las coordenadas determinadas antiguamente
Finalmente en 1987 se creoacute la Internacional Earth Rotacion Service (IERS)
reemplazando a la BIH y a la IPMS para entre otras cosas monitorizar el movimiento del polo basaacutendose en teacutecnicas espaciales de forma continua (obtencioacuten del polo instantaacuteneo figura 10) con lo que el polo BIH determinado en 1984 pasoacute a llamarse polo IERS Desde abril de 2003 el nombre fue cambiado al de Internacional Earth Rotation and Reference Systems Service (IERS) proporcionando las coordenadas instantaacuteneas del polo para cada diacutea referidas al polo IERS cuyo eje X seraacute el meridiano de Greenwich convencional y el eje Y estaacute situado hacia el Oeste (direccioacuten de su sentido positivo) formando 90 grados las unidades de estas coordenadas son segundos de arco figura 11
En las paacuteginas httpwwwiersorg y httphpiersobspmfr se puede
encontrar mucha maacutes informacioacuten Como se ha dicho las mediciones se realizan en un momento determinado (t)
conociendo a traveacutes de los valores proporcionados por la IERS los valores para el movimiento del polo se podraacuten transformar los valores de latitud y longitud instantaacuteneos a valores de latitud y longitud absolutos sobre el sistema de referencia
Figura 10 Polo instantaacuteneo en lila y polo medio en amarillo
Figura 11 Sistema de referencia y coordenadas en las que se expresa el movimiento del polo
12
geoceacutentrico terrestre convencional Los valores de esta correccioacuten rondan los 01 segundos
24- Sistemas de referencia geodeacutesicos
241- Sistemas de referencia geodeacutesicos globales GRS80 y WGS84
Se definiraacute daacutetum como el conjunto de paraacutemetros que definen la posicioacuten de
un elipsoide respecto a la tierra Para determinarlo hace falta conocer la geometriacutea del elipsoide a y f su posicioacuten respecto al geocentro ∆X ∆Y ∆Z (coordenadas del centro del elipsoide respecto al geocentro) su orientacioacuten R1 R2 R3 (orientacioacuten de los ejes del elipsoide respecto a los terrestres) y la escala k
Si ∆X = ∆Y = ∆Z = 0 el daacutetum Geodeacutesico se llama Global o absoluto El Geodetic Reference System 1980 (GRS80) adoptado por la IUGG
(International Union of Geodesy and Geophysics) por su asamblea general de Camberra en 1979 pertenece a este grupo
Este sistema reemplaza al GRS67 por no representar adecuadamente el
tamantildeo forma y el campo gravitatorio con precisioacuten suficiente para la mayoriacutea de aplicaciones geodeacutesicas geofiacutesicas astronoacutemicas e hidrograacuteficas
Los principales paraacutemetros del sistema son
a = 6378137 m (Obtenido a partir de medidas SLR y Doppler) J2 = 10826310-8 (Obtenido a partir de perturbaciones en la oacuterbita de sateacutelites) GM = 3986005108 m3sg2 (Obtenido a partir de SLR LLR y pruebas espaciales) ω = 729311510-11 rdsg (Obtenido a partir de medidas astronoacutemicas) La orientacioacuten del eje Z seraacute la definida por el polo CIO como eje X el meridiano 0 definido por la BIH y el eje Y formando la tripleta dextroacutegira Este sistema sigue en vigor y no se ha actualizado en su definicioacuten ya que se debe tener en cuenta que por debajo del metro en la diferencia de paraacutemetros no existe una diferencia praacutectica en la determinacioacuten de coordenadas Asiacute las mejoras del mismo se consideran avances cientiacuteficos pero el estaacutendar (GRS80) no se debe cambiar
Cuando la informacioacuten sobre el datum se obtiene a partir de posiciones dentro de la oacuterbita de los sateacutelites (determinacioacuten dinaacutemica del sistema) los coeficientes del potencial gravitatorio (J2) asiacute como algunas constantes (ω velocidad de la luz constante gravitatoria geoceacutentrica) forman parte de la definicioacuten del datum ya que se calculan todas juntas
Un ejemplo de eacuteste uacuteltimo grupo es el World Geodetic System 1984 (WGS84)
utilizado por la teacutecnica GPS y obtenido exclusivamente a partir de los datos de la constelacioacuten de sateacutelites GPS
Los valores de sus principales paraacutemetros son
a = 6378137 m
J2 = 108262998310-8
GM = 3986004418108 m3sg2
13
ω = 729311510-11 rdsg
1f = 298257223563
El World Geodetic System 1984 (WGS84) utiliza como eje Z el polo IERS como eje X el meridiano 0 definido por el IERS y el eje Y formando la tripleta dextroacutegira Su origen coincide con el geocentro
A nivel praacutectico tal como se puede deducir el GRS80 y el WGS84 se pueden
considerar ideacutenticos 242- Sistemas de referencia geodeacutesicos locales ED50 Si ∆X ne ∆Y ne∆Z ne 0 nos encontramos ante un datum local El marco local queda definido por siete paraacutemetros (o mejor dicho 6 maacutes una condicioacuten) valores para a y f (geometriacutea del elipsoide) valores de las desviaciones de la vertical (ξ η) y de la ondulacioacuten del geoide (distancia entre el elipsoide de referencia y el geoide) con estos tres paraacutemetros se obtiene la orientacioacuten del elipsoide el acimut geodeacutesico de una liacutenea y como condicioacuten que el semieje menor del elipsoide y el eje medio de rotacioacuten terrestre sean paralelos Ademaacutes se intenta que el elipsoide se ajuste lo maacuteximo posible a la zona a cartografiar de manera que la reduccioacuten de observaciones sea lo maacutes sencilla posible Un ejemplo de este tipo de sistemas es el ED-50 (European Datum de 1950) sistema al que estaacute referida toda la cartografiacutea espantildeola Este sistema adoptoacute el elipsoide de Hayford o Internacional introducido por la IUGG en su asamblea general de 1924 en Madrid donde a y f fueron obtenidas a partir de mediciones astronoacutemicas y geodeacutesicas en los Estados Unidos a = 6378388 f = 1297 Como punto fundamental se adoptoacute Potsdam lugar donde la desviacioacuten de la vertical (diferencia angular entre la vertical geodeacutesica y astronoacutemica) y la ondulacioacuten del geoide son conocidas (ξ = 3rdquo36 η = 1rdquo78 N = 0) de manera que el elipsoide queda orientado respecto a la Tierra Cabe destacar que fijar los valores de la desviacioacuten de la vertical (ξ η) y el valor de la ondulacioacuten del geoide N en el punto fundamental para orientar el elipsoide es equivalente a fijarlo a partir de las coordenadas X Y Z de su centro respecto al geocentro figura 12 La exactitud de ED50 oscila entre unos pocos metros en el centro de Europa a maacutes de 10 en el sur aunque su precisioacuten relativa es mucho mayor y maacutes que suficiente para los levantamientos cartograacuteficos de pequentildeas y medianas escalas por lo que en 1968 el Servicio Geograacutefico del ejeacutercito lo adopta para su cartografiacutea baacutesica 150000 e igualmente el IGN en 1979
14
25- Marco de referencia terrestre internacional (ITRF) El sistema de referencia terrestre internacional convencional se materializa a traveacutes de las coordenadas de una serie de estaciones distribuidas por todo el mundo en ese sistema de referencia constituyendo el ITRF (Internacional Terrestrial Reference Frame) establecido y mantenido por la IERS Baacutesicamente el sistema que materializa se define como geoceacutentrico (incluyendo la atmoacutesfera y los oceacuteanos) la base para la escala la constituye el metro (en el sistema Internacional) y con orientacioacuten de sus ejes tal como establecioacute la BIH en 1984
bull Eje Z Polo medio determinado por la IERS y llamado IERS Reference Pole (IRP) o Convencional Terrestrial Pole (CTP)
bull Eje X Meridiano de Greenwich Convencional determinado por la IERS y
llamado IERS Reference Meridian (IRM) o Greenwich Mean Origin (GMO)
bull Eje Y Formando una tripleta dextroacutegira con los ejes anteriores sobre el
plano del ecuador convencional El marco estaacute formado por coordenadas cartesianas y velocidades de una serie
de estaciones equipadas con teacutecnicas de observacioacuten espacial (VLBI SLR LLR GPS desde 1991 y DORIS desde 1994) en la figura 13 se pueden ver las estaciones para el ITRF2000 Si se desean coordenadas geodeacutesicas se recomienda el uso del elipsoide GRS80 Estas coordenadas definen impliacutecitamente el origen la escala y la orientacioacuten de los ejes coordenados X Y Z del sistema de referencia
La historia de los diferentes ITRF comenzoacute en 1984 y a partir de ahiacute se han obtenido las soluciones 88 89 90 91 92 93 94 96 97 2000 2005 y recientemente la 2008 estas soluciones difieren unas de otras debido a la incorporacioacuten constante de nuevas estaciones nuevas observaciones en las estaciones ya existentes mejora en la precisioacuten de las mismas o nuevos meacutetodos de procesamiento
Figura 12 Sistema geodeacutesico local
Geoide
Elipsoide
X
Y
Z
X
Y
Zo
XoYo
a
b
o
PNbull
bull
(ξ η)
15
Cada una de las teacutecnicas (GPS VLBI LLR SLR o DORIS) genera su propio marco de referencia k con coordenadas y velocidades conocidas para cada estacioacuten i en cada eacutepoca ts de observacioacuten por lo tanto las soluciones de las teacutecnicas se deben
combinar para estimar las posiciones y velocidades en el marco ITRF ( iITRFX y
i
ITRFXbull
) en una eacutepoca de referencia t0 para cada estacioacuten i asiacute como los paraacutemetros de transformacioacuten (factor de escala Dk vector de traslaciones Tk en X Y Z y matriz de
rotaciones Rk sobre los ejes X YZ) y sus variaciones ( KDbull
KTbull
KRbull
) entre el marco ITRF (marco final combinacioacuten de todos los k) y el correspondiente k paraacutemetros que a su vez pueden estar referidos a un eacutepoca tK diferente de las anteriores La combinacioacuten general se ajusta a las ecuaciones
( ) ( )( )
01
i i i i i i i i iks ITRF s ITRF k k ITRF k ITRF s k k ITRF k ITRF
i i i is ITRF k k ITRF k ITRF
X X t t X T D X R X t t T D X R X
X X T D X R X
bull bull bull bull
bull bull bull bull bull
= + minus + + + + minus + +
= + + + La segunda ecuacioacuten se obtiene a partir de derivar la primera y considerar que las derivadas segundas son nulas (aceleracioacuten nula) y que la derivada de i
ITRFX (sobre 10 centiacutemetros por antildeo como media) multiplicada por DK o RK (que son del orden de 10-5) tambieacuten se pueden despreciar Este sistema de ecuaciones es vaacutelido para
bull Observaciones bajo la forma de serie temporal de coordenadas (por ejemplo soluciones semanales para cada estacioacuten y por tanto en su correspondiente eacutepoca ts para una determinada teacutecnica espacial) por lo que la segunda ecuacioacuten (velocidad) del sistema (1) no se utiliza y donde la solucioacuten no es maacutes que la acumulacioacuten de eacutepocas de observacioacuten
bull Observaciones bajo la forma de paraacutemetros globales (coordenadas y
velocidades) vaacutelidos para un intervalo de tiempo elevado (varios antildeos) y
Figura 13 Estaciones que forman el ITRF2000 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
16
centrado en una eacutepoca tk (que puede coincidir o no con la t0 para cada una de las teacutecnicas espaciales)
La conexioacuten entre las diferentes teacutecnicas de observacioacuten se realiza en aquellas estaciones (collocation sites) que posean dos o maacutes teacutecnicas de observacioacuten y sea posible la determinacioacuten precisa (plusmn4-5 mm de error) de los incrementos de coordenadas X Y Z (local ties) entre los instrumentos de medida (receptores GPS o DORIS telescopios y radiotelescopios) utilizando mediciones topograacuteficas o con GPS En cada una de estas estaciones se genera una solucioacuten maacutes de acuerdo con las ecuaciones (1) teniendo en cuenta los incrementos de coordenadas es decir si una estacioacuten posee instrumental VLBI y SLR y se han medido las diferencias entre los dos instrumentos de forma precisa (incrementos de X Y Z) se genera una ecuacioacuten del tipo (1) para la solucioacuten VLBI otra para la SLR y otra con los incrementos observados (por ejemplo la solucioacuten VLBI maacutes los incrementos de manera que se estaacuten dando coordenadas en el marco VLBI a la estacioacuten SLR) El establecimiento de un marco de referencia de precisioacuten no es tarea sencilla ya que la Tierra sufre deformaciones debido a su caraacutecter elaacutestico y las precisiones de las observaciones son cada vez mayores por lo que las observaciones deben ser corregidas por los efectos de
bull Mareas terrestres bull Carga atmosfeacuterica y oceaacutenica
bull Tectoacutenica de placas El modelo utilizado hasta el ITRF2005 (incluido) es el
NNR-NUVEL-1A basado en que no existen rotaciones sobre el manto de las placas tectoacutenicas y por tanto la suma de las velocidades de las placas sobre toda la Tierra es cero Para el ITRF2008 se utiliza un modelo basado en las propias velocidades de las estaciones ITRF observadas con teacutecnicas espaciales el APKIM2005 (las velocidades presentan tambieacuten error ya que se obtienen a partir de caacutelculos)
bull Movimientos locales y regionales Un ejemplo seriacutea el rebote postglacial de
Escandinavia
Por tanto y tal como se pude ver en la tabla 3 el ITRF es un marco dinaacutemico que cambia de acuerdo a las variaciones temporales de las coordenadas y velocidades debido a los efectos anteriores
251- ITRF2000 ITRF2005 e ITRF2008
El marco ITRF2000 estaacute basado en 800 determinaciones en cerca de 500 sitios figura 13 estaacute referido a la eacutepoca 19970 (t0=19970) quedando determinado a partir de soluciones globales para cada marco k en una eacutepoca de referencia tk Para resolver el sistema de ecuaciones (1) es necesario fijar el datum de alguna manera el datum de la solucioacuten ITRF2000 quedoacute definido de la siguiente manera
bull Escala Media ponderada de determinadas medidas VLBI y SLR de alta
precisioacuten Esto se materializa fijando a cero el valor de escala y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 y las estaciones seleccionadas
bull Oriacutegen Media ponderada de determinaciones SLR (el centro de la oacuterbita de los
sateacutelites corresponderaacute al geocentro terrestre) Esto se materializa fijando a cero el valor del vector de traslacioacuten y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 las estaciones seleccionadas
17
bull Orientacioacuten Seleccioacuten de determinadas estaciones ITRF (sus coordenadas y velocidades) de alta calidad geodeacutesica que cumpla con los siguientes criterios
1 Que posea observaciones continuas al menos de los 3 uacuteltimos antildeos 2 Localizado en plataforma riacutegida y lejos de zonas de deformacioacuten 3 Que se haya determinado la velocidad con una precisioacuten mejor a
3mmantildeo 4 Que la velocidad sea menor a 3mmantildeo
Basado en estos criterios las 54 estaciones seleccionadas se pueden ver en la figura 14 como puntos azules En el sistema de ecuaciones (1) se introduce una ecuacioacuten de condicioacuten de forma que para estos puntos seleccionados exista correspondencia entre la orientacioacuten del marco de referencia y la del marco de referencia anterior (ITRF19970 por lo que no seraacuten maacutes que las definidas en la orientacioacuten BIH para 19840) La variacioacuten en la orientacioacuten (variacioacuten de estas coordenadas) seraacute la del modelo NNR-NUVEL-1A
El marco ITRF2005 referido a la eacutepoca 20000 (t0=20000) se ha basado
uacutenicamente en determinaciones SLR VLBI DORIS y GPS en 608 estaciones situadas en 338 localizaciones diferentes figura 15 quedando definido a partir de series temporales continuas de observaciones (soluciones semanales para GPS entre 1996 y 2005 DORIS entre 1993 y 2005 y SLR entre 1993 y 2005 y sesiones diarias para VLBI entre 1981 y 2005) de esta manera se puede realizar un anaacutelisis maacutes riguroso de las observaciones y detectar aquellas que presenten error o discontinuidades en las series Cada eacutepoca genera sistema de ecuaciones (1) para cada teacutecnica y en caso de que una estacioacuten presente una discontinuidad en la serie una nueva posicioacuten y velocidad se deben calcular para esa estacioacuten por lo que las coordenadas y velocidades calculadas lo seraacuten para un cierto intervalo de tiempo El datum se define de la siguiente manera
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20000) y variacioacuten nula
de estos paraacutemetros entre ITRF2005 y las series SLR bull Escala Factor de escala nulo (para la eacutepoca 20000) y variacioacuten nula entre
ITRF2005 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20000) y variaciones nulas entre ITRF2005 y ITRF2000 (en las estaciones ITRF seleccionadas)
Figura 14 En azul se muestran los 54 puntos de la ITRF que cumplen con los 4 criterios y en rojo los que cumplen con los criterios 1 3 y 4
18
En la tabla 1 se pueden ver los paraacutemetros de transformacioacuten entre el marco ITRF2005 y el ITRF2000 usando 70 estaciones especiacuteficas para su caacutelculo (las mismas que las utilizadas para orientar el ITRF2005 al ITRF2000 por lo que no existen paraacutemetros de rotacioacuten en esta transformacioacuten) Los resultados muestran las traslaciones del geocentro en miliacutemetros y el factor de escala en partes por billoacuten (con la notacioacuten americana es decir 10-9) asiacute como sus variaciones temporales (miliacutemetrosantildeo y ppbantildeo) Los resultados de la transformacioacuten muestran una variacioacuten temporal de 18 miliacutemetros por antildeo entre ITRF2005 e ITRF2000 esta velocidad de movimiento del geocentro no genera la estabilidad deseada del marco de referencia por lo que este marco se debe cambiar raacutepidamente Se cree que este movimiento se debe a la reduccioacuten de estaciones SLR con el tiempo asiacute como a su mala distribucioacuten geograacutefica (muchas maacutes en el hemisferio Norte que en el Sur) asiacute como la utilizacioacuten de diferentes modelos de procesamiento SLR para la solucioacuten ITRF2005 y la ITRF2000
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) 01 -08 -58 040 -02 01 -18 008
En base a esta uacuteltima conclusioacuten el marco ITRF2008 referido a la eacutepoca 20050 (t0=20050) se basa en el reprocesamiento de todas las series de observaciones de las cuatro teacutecnicas espaciales utilizadas (VLBI entre 1980 y 2009 GPSGNSS entre 1997 y 2009 SLR entre 1983 y 2009 DORIS entre 1993 y 2009) de manera que utilicen estaacutendares actuales e ideacutenticos y el mismo software para la reduccioacuten modelizacioacuten y correccioacuten de observaciones (modelos de troposfera e ionosfera centros de fase de emisioacuten de los sateacutelites y receptores etc) De esta manera el marco ITRF conservaraacute su definicioacuten a lo largo del tiempo en cuanto a origen escala y orientacioacuten (se produciraacuten series temporales de observaciones homogeacuteneas) por lo que los estudios de deformacioacuten dinaacutemica terrestre saldraacuten beneficiados (por ejemplo es esencial para el estudio del nivel medio del mar y su variacioacuten global y regional que el marco de referencia se defina siempre igual) 608 estaciones situadas en 338 localizaciones diferentes constituyen el marco El datum ITRF2008 se define de la siguiente manera
Figura 15 Estaciones que forman el ITRF2005 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
Tabla 1 Paraacutemetros de transformacioacuten entre los marcos ITRF2005 e ITRF2000 los paraacutemetros de rotacioacuten y sus variaciones son cero
19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report
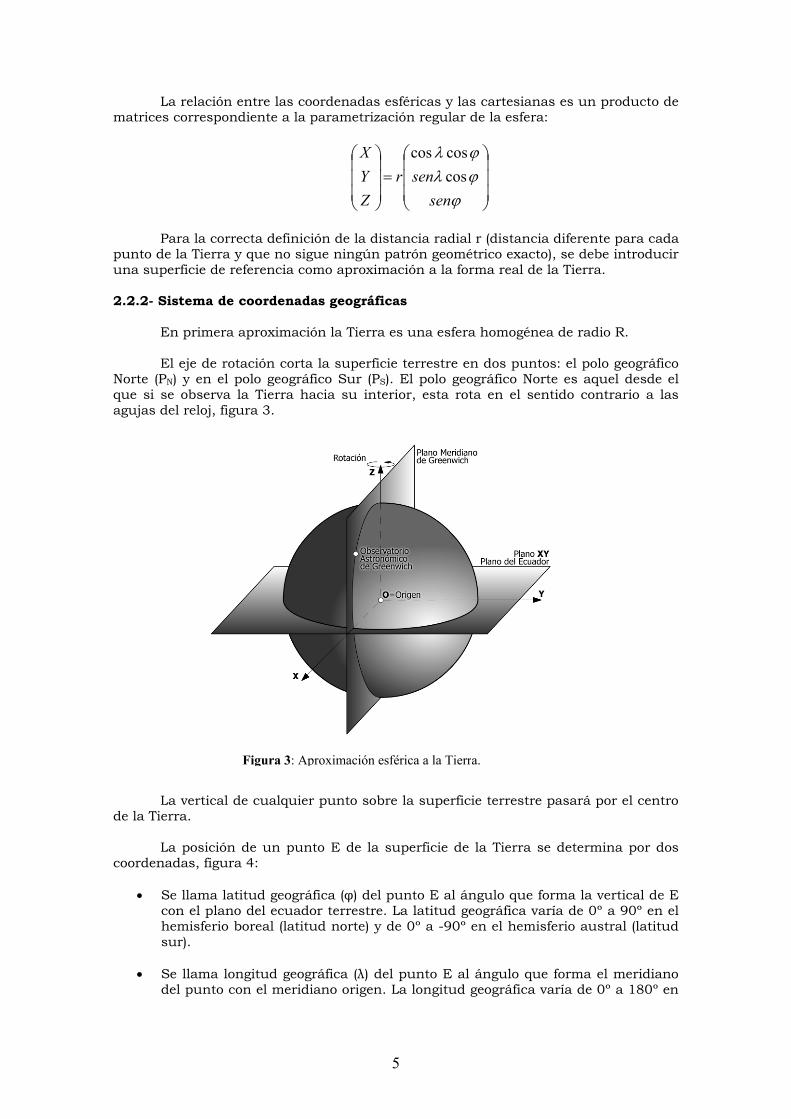
5
La relacioacuten entre las coordenadas esfeacutericas y las cartesianas es un producto de matrices correspondiente a la parametrizacioacuten regular de la esfera
=
ϕϕλϕλ
sensenr
ZYX
coscoscos
Para la correcta definicioacuten de la distancia radial r (distancia diferente para cada punto de la Tierra y que no sigue ninguacuten patroacuten geomeacutetrico exacto) se debe introducir una superficie de referencia como aproximacioacuten a la forma real de la Tierra 222- Sistema de coordenadas geograacuteficas En primera aproximacioacuten la Tierra es una esfera homogeacutenea de radio R
El eje de rotacioacuten corta la superficie terrestre en dos puntos el polo geograacutefico Norte (PN) y en el polo geograacutefico Sur (PS) El polo geograacutefico Norte es aquel desde el que si se observa la Tierra hacia su interior esta rota en el sentido contrario a las agujas del reloj figura 3
La vertical de cualquier punto sobre la superficie terrestre pasaraacute por el centro de la Tierra La posicioacuten de un punto E de la superficie de la Tierra se determina por dos coordenadas figura 4
bull Se llama latitud geograacutefica (φ) del punto E al aacutengulo que forma la vertical de E con el plano del ecuador terrestre La latitud geograacutefica variacutea de 0ordm a 90ordm en el hemisferio boreal (latitud norte) y de 0ordm a -90ordm en el hemisferio austral (latitud sur)
bull Se llama longitud geograacutefica (λ) del punto E al aacutengulo que forma el meridiano
del punto con el meridiano origen La longitud geograacutefica variacutea de 0ordm a 180ordm en
Figura 3 Aproximacioacuten esfeacuterica a la Tierra
6
el hemisferio oriental y de 0ordm a -180ordm en el hemisferio occidental es decir el primero al este y el segundo al oeste
223- Sistema de coordenadas geodeacutesicas y geoceacutentricas Sistema de referencia geodeacutesico La segunda aproximacioacuten a la forma de la Tierra es un elipsoide de revolucioacuten definido por su semieje mayor (a) y su semieje menor (b) o aplanamiento (f) El centro del elipsoide coincide con el centro del sistema de referencia es decir con el geocentro y el semieje menor se hace coincidir con el eje de rotacioacuten terrestre quedando asiacute constituido el sistema de coordenadas geodeacutesico
La vertical geodeacutesica en un punto de la superficie del elipsoide de revolucioacuten coincide con la direccioacuten del vector normal al elipsoide en dicho punto y por tanto no pasa por el centro del elipsoide figura 5
Asiacute las coordenadas geodeacutesicas seraacuten
bull Latitud geodeacutesica es el aacutengulo que forma la vertical geodeacutesica del punto con el
plano ecuador geodeacutesico
bull Longitud geodeacutesica es el aacutengulo formado por el meridiano geodeacutesico del punto de caacutelculo y el meridiano geodeacutesico origen
Introducimos en este momento las coordenadas geoceacutentricas ya que sobre el
elipsoide no coincidiraacuten con las geodeacutesicas en este caso la longitud geoceacutentrica seraacute igual a la geodeacutesica pero la latitud geoceacutentrica (β) seraacute el aacutengulo entre la liacutenea que une el centro del elipsoide y un punto sobre el elipsoide y el ecuador geodeacutesico
Figura 4 Coordenadas Geograacuteficas
7
ββ
224- Sistema de coordenadas astronoacutemicas Sistema de referencia graviacutefico Las observaciones astronoacutemicas geodeacutesicas y topograacuteficas se efectuacutean sobre la
superficie real de la Tierra y en un momento de tiempo determinado asiacute se debe retocar el concepto de figura y forma de la Tierra y pasar a la definicioacuten de geoide como figura y situar las observaciones en un momento determinado
El geoide se define como superficie equipotencial respecto a la gravedad y
normal a su direccioacuten siendo esta direccioacuten normal la de la fuerza de gravedad que seraacute la que sigue un rayo oacuteptico de un instrumento topograacutefico cuando se estaciona o liacutenea de la plomada Debido a la distribucioacuten no homogeacutenea de masas en el interior de la Tierra y a la forma achatada por los polos esta liacutenea no coincidiraacute ni con la vertical geograacutefica ni con la geodeacutesica ni con la geoceacutentrica figura 6 Asiacute se puede definir
bull Dado un punto P de la superficie topograacutefica terrestre se denomina vertical
astronoacutemica instantaacutenea de P a la recta tangente en P a la liacutenea de la plomada en ese punto
bull Se denomina plano ecuador astronoacutemico instantaacuteneo al plano perpendicular al
eje instantaacuteneo de rotacioacuten que pasa por el centro de masas de la Tierra
bull Se llama plano meridiano astronoacutemico instantaacuteneo de P al plano que contiene a la vertical astronoacutemica de P y al eje instantaacuteneo de rotacioacuten terrestre
Definieacutendose las coordenadas astronoacutemicas instantaacuteneas como
bull Latitud astronoacutemica de P es el aacutengulo Ф que forma la vertical astronoacutemica de P con el plano del ecuador astronoacutemico instantaacuteneo Variacutea de 0ordm a 90ordm en el hemisferio astronoacutemico norte y de 0ordm a -90ordm en el hemisferio astronoacutemico sur
bull Longitud astronoacutemica de P es el aacutengulo Λ que forma el plano meridiano
astronoacutemico instantaacuteneo de P con el plano meridiano astronoacutemico instantaacuteneo tomando como origen (Greenwich) Se suele considerar de 0ordm a 360ordm positiva al este
Figura 5 Coordenadas geodeacutesicas y geoceacutentricas
8
23- Movimiento del polo Coordenadas instantaacuteneas y absolutas
La direccioacuten del eje de rotacioacuten terrestre cambia con el tiempo respecto a la propia superficie terrestre y por tanto respecto al sistema de referencia geoceacutentrico terrestre
El polo describe a lo largo del tiempo una trayectoria libre que es una curva
maacutes o menos circular de radio 6 metros figura 7 y periodo aproximado de 430 diacuteas provocado por el caraacutecter deformable de la Tierra redistribuciones interiores de las masas terrestres efectos del rebote postglaciar en Canadaacute y Fenoscandia movimientos tectoacutenicos redistribuciones atmosfeacutericas etc figura 8
Superpuesta a eacutesta trayectoria libre se encuentran una serie de oscilaciones
forzadas provocadas por la influencia gravitatoria del Sol y la Luna con una magnitud de 60 centiacutemetros figura 7
Eje Instantaneo de Rotacioacuten
Meridiano Instantaneode Greenwich
Eje Z
Eje X
Eje YCentro de Masas
Liacutenea Vertical (Plomada)
Tangente a la vertical por el punto P
Vector de gravedad
Superficie equipotencial de P (WP)
P
Λ Φ
Eje Instantaneo de Rotacioacuten
Meridiano Instantaneode Greenwich
Eje Z
Eje X
Eje YCentro de Masas
Liacutenea Vertical (Plomada)
Tangente a la vertical por el punto P
Vector de gravedad
Superficie equipotencial de P (WP)
P
Λ Φ
Figura 6 Coordenadas Astronoacutemicas
9
Este movimiento del polo afecta directamente a las coordenadas de los puntos sobre la superficie terrestre ya que el sistema de referencia iraacute cambiando Lo maacutes indicado es tomar como eje Z de referencia el origen o centro de los ciacuterculos de movimiento libre quedando asiacute determinado el eje Z de un modo convencional Si las coordenadas de los puntos se refieren al polo convencional tendremos coordenadas absolutas si se refieren al polo instantaacuteneo (situacioacuten del eje de rotacioacuten en un determinado momento) tendremos coordenadas instantaacuteneas
No hay teoriacutea cientiacutefica que pueda predecir el movimiento del polo y por lo
tanto su posicioacuten asiacute que se monitoriza continuamente mediante observaciones Esta materializacioacuten se realizaba con observaciones astronoacutemicas lo que dio lugar al establecimiento de tres polos diferentes
bull Polo CIO desde 1899 la International Latitude Service (ILS) utilizando
observaciones astronoacutemicas sobre cinco estaciones en un mismo paralelo (φ = 39ordm 08rsquo) llegoacute a la definicioacuten del polo CIO (Convencional International Origen) definido como la posicioacuten media del polo entre 1900 y 1905 de manera que se obtuvieron determinaciones precisas de
6 m
60 cm
O
6 m
60 cm
O
Figura 7 Movimiento libre y oscilaciones forzadas que cuya suma describe el movimiento del polo
Figura 8 Causas del movimiento del polo
10
los largos periacuteodos del movimiento del polo (su situacioacuten antildeo a antildeo figura 9) La precisioacuten de estas determinaciones se cifroacute en 3 metros
bull Polo BIH (Bureau International de lrsquoHeure) Por otro lado el eje X del
sistema de referencia geoceacutentrico terrestre convencional se determinoacute a partir de las longitudes de 50 estaciones por la BIH creada en 1912 para mantener la escala de tiempo uniforme es decir era el organismo encargado del mantenimiento de la hora y de la posicioacuten del origen de longitudes (posicioacuten media del observatorio astronoacutemico de greenwich) a traveacutes de determinacioacuten de la longitud astronoacutemica de los observatorios pertenecientes a este organismo La determinacioacuten de la latitud de estos observatorios generoacute el polo BIH que proporcionaba estimaciones maacutes frecuentes (medias de 5 diacuteas) y precisiones de 1 metro en la determinacioacuten del movimiento del polo
bull Polo IPMS Cada vez con maacutes frecuencia se empezoacute a necesitar los
movimientos de corto periodo del polo para aplicaciones geodeacutesicas y astronoacutemicas figura 9 por lo que el ILS se reorganizoacute en 1962 en el Internacional Polar Motion Service (IPMS) asiacute surge el polo IPMS generado a partir de determinaciones de latitud astronoacutemica en 80 estaciones y con precisioacuten de un metro en la determinacioacuten del movimiento del polo
En 1967 el polo CIO es aceptado como estaacutendar por la International
Astronomical Union para dar asiacute continuidad a las observaciones maacutes antiguas eferidas al polo CIO por lo que los polos BIH e IPMS se intentan referenciar al polo CIO esto no es posible debido a las precisiones de los diferentes polos ya que se trata de la determinacioacuten de un ciacuterculo aproximadamente de 6 metros de diaacutemetro que queda definido con 3 metros de error en el polo CIO y con un metro en los otros dos es decir en realidad con estas precisiones se estaacute hablando del mismo polo
La situacioacuten se complica a partir de ese antildeo debido a la irrupcioacuten de la
geodesia por sateacutelite Se empiezan a utilizar medidas a sateacutelite para la determinacioacuten del movimiento del polo en concreto medidas Doppler a los sateacutelites de la constelacioacuten TRANSIT alcanzando precisiones de 02 metros
En los antildeos siguientes nuevas teacutecnicas espaciales demuestran la precisioacuten de
las mismas en la determinacioacuten del movimiento del polo medidas laacuteser a sateacutelites o a la Luna VLBI GPS DORIS PRARE Todas estas teacutecnicas se basan en la medicioacuten continua de coordenadas por lo que la monitorizacioacuten del polo es permanente y su precisioacuten se reduce hasta los 6-8 centiacutemetros
Figura 9 Movimientos de largo y corto periodo del polo
11
Asiacute en 1984 la BIH establecioacute un nuevo sistema de referencia terrestre basado
en las coordenadas cartesianas geoceacutentricas de las estaciones fundamentales donde teacutecnicas espaciales habiacutean sido aplicadas este nuevo sistema coincide con el polo CIO astronoacutemico si se tienen en cuanta las precisiones en la determinacioacuten del CIO lo cual permite dar continuidad a las coordenadas determinadas antiguamente
Finalmente en 1987 se creoacute la Internacional Earth Rotacion Service (IERS)
reemplazando a la BIH y a la IPMS para entre otras cosas monitorizar el movimiento del polo basaacutendose en teacutecnicas espaciales de forma continua (obtencioacuten del polo instantaacuteneo figura 10) con lo que el polo BIH determinado en 1984 pasoacute a llamarse polo IERS Desde abril de 2003 el nombre fue cambiado al de Internacional Earth Rotation and Reference Systems Service (IERS) proporcionando las coordenadas instantaacuteneas del polo para cada diacutea referidas al polo IERS cuyo eje X seraacute el meridiano de Greenwich convencional y el eje Y estaacute situado hacia el Oeste (direccioacuten de su sentido positivo) formando 90 grados las unidades de estas coordenadas son segundos de arco figura 11
En las paacuteginas httpwwwiersorg y httphpiersobspmfr se puede
encontrar mucha maacutes informacioacuten Como se ha dicho las mediciones se realizan en un momento determinado (t)
conociendo a traveacutes de los valores proporcionados por la IERS los valores para el movimiento del polo se podraacuten transformar los valores de latitud y longitud instantaacuteneos a valores de latitud y longitud absolutos sobre el sistema de referencia
Figura 10 Polo instantaacuteneo en lila y polo medio en amarillo
Figura 11 Sistema de referencia y coordenadas en las que se expresa el movimiento del polo
12
geoceacutentrico terrestre convencional Los valores de esta correccioacuten rondan los 01 segundos
24- Sistemas de referencia geodeacutesicos
241- Sistemas de referencia geodeacutesicos globales GRS80 y WGS84
Se definiraacute daacutetum como el conjunto de paraacutemetros que definen la posicioacuten de
un elipsoide respecto a la tierra Para determinarlo hace falta conocer la geometriacutea del elipsoide a y f su posicioacuten respecto al geocentro ∆X ∆Y ∆Z (coordenadas del centro del elipsoide respecto al geocentro) su orientacioacuten R1 R2 R3 (orientacioacuten de los ejes del elipsoide respecto a los terrestres) y la escala k
Si ∆X = ∆Y = ∆Z = 0 el daacutetum Geodeacutesico se llama Global o absoluto El Geodetic Reference System 1980 (GRS80) adoptado por la IUGG
(International Union of Geodesy and Geophysics) por su asamblea general de Camberra en 1979 pertenece a este grupo
Este sistema reemplaza al GRS67 por no representar adecuadamente el
tamantildeo forma y el campo gravitatorio con precisioacuten suficiente para la mayoriacutea de aplicaciones geodeacutesicas geofiacutesicas astronoacutemicas e hidrograacuteficas
Los principales paraacutemetros del sistema son
a = 6378137 m (Obtenido a partir de medidas SLR y Doppler) J2 = 10826310-8 (Obtenido a partir de perturbaciones en la oacuterbita de sateacutelites) GM = 3986005108 m3sg2 (Obtenido a partir de SLR LLR y pruebas espaciales) ω = 729311510-11 rdsg (Obtenido a partir de medidas astronoacutemicas) La orientacioacuten del eje Z seraacute la definida por el polo CIO como eje X el meridiano 0 definido por la BIH y el eje Y formando la tripleta dextroacutegira Este sistema sigue en vigor y no se ha actualizado en su definicioacuten ya que se debe tener en cuenta que por debajo del metro en la diferencia de paraacutemetros no existe una diferencia praacutectica en la determinacioacuten de coordenadas Asiacute las mejoras del mismo se consideran avances cientiacuteficos pero el estaacutendar (GRS80) no se debe cambiar
Cuando la informacioacuten sobre el datum se obtiene a partir de posiciones dentro de la oacuterbita de los sateacutelites (determinacioacuten dinaacutemica del sistema) los coeficientes del potencial gravitatorio (J2) asiacute como algunas constantes (ω velocidad de la luz constante gravitatoria geoceacutentrica) forman parte de la definicioacuten del datum ya que se calculan todas juntas
Un ejemplo de eacuteste uacuteltimo grupo es el World Geodetic System 1984 (WGS84)
utilizado por la teacutecnica GPS y obtenido exclusivamente a partir de los datos de la constelacioacuten de sateacutelites GPS
Los valores de sus principales paraacutemetros son
a = 6378137 m
J2 = 108262998310-8
GM = 3986004418108 m3sg2
13
ω = 729311510-11 rdsg
1f = 298257223563
El World Geodetic System 1984 (WGS84) utiliza como eje Z el polo IERS como eje X el meridiano 0 definido por el IERS y el eje Y formando la tripleta dextroacutegira Su origen coincide con el geocentro
A nivel praacutectico tal como se puede deducir el GRS80 y el WGS84 se pueden
considerar ideacutenticos 242- Sistemas de referencia geodeacutesicos locales ED50 Si ∆X ne ∆Y ne∆Z ne 0 nos encontramos ante un datum local El marco local queda definido por siete paraacutemetros (o mejor dicho 6 maacutes una condicioacuten) valores para a y f (geometriacutea del elipsoide) valores de las desviaciones de la vertical (ξ η) y de la ondulacioacuten del geoide (distancia entre el elipsoide de referencia y el geoide) con estos tres paraacutemetros se obtiene la orientacioacuten del elipsoide el acimut geodeacutesico de una liacutenea y como condicioacuten que el semieje menor del elipsoide y el eje medio de rotacioacuten terrestre sean paralelos Ademaacutes se intenta que el elipsoide se ajuste lo maacuteximo posible a la zona a cartografiar de manera que la reduccioacuten de observaciones sea lo maacutes sencilla posible Un ejemplo de este tipo de sistemas es el ED-50 (European Datum de 1950) sistema al que estaacute referida toda la cartografiacutea espantildeola Este sistema adoptoacute el elipsoide de Hayford o Internacional introducido por la IUGG en su asamblea general de 1924 en Madrid donde a y f fueron obtenidas a partir de mediciones astronoacutemicas y geodeacutesicas en los Estados Unidos a = 6378388 f = 1297 Como punto fundamental se adoptoacute Potsdam lugar donde la desviacioacuten de la vertical (diferencia angular entre la vertical geodeacutesica y astronoacutemica) y la ondulacioacuten del geoide son conocidas (ξ = 3rdquo36 η = 1rdquo78 N = 0) de manera que el elipsoide queda orientado respecto a la Tierra Cabe destacar que fijar los valores de la desviacioacuten de la vertical (ξ η) y el valor de la ondulacioacuten del geoide N en el punto fundamental para orientar el elipsoide es equivalente a fijarlo a partir de las coordenadas X Y Z de su centro respecto al geocentro figura 12 La exactitud de ED50 oscila entre unos pocos metros en el centro de Europa a maacutes de 10 en el sur aunque su precisioacuten relativa es mucho mayor y maacutes que suficiente para los levantamientos cartograacuteficos de pequentildeas y medianas escalas por lo que en 1968 el Servicio Geograacutefico del ejeacutercito lo adopta para su cartografiacutea baacutesica 150000 e igualmente el IGN en 1979
14
25- Marco de referencia terrestre internacional (ITRF) El sistema de referencia terrestre internacional convencional se materializa a traveacutes de las coordenadas de una serie de estaciones distribuidas por todo el mundo en ese sistema de referencia constituyendo el ITRF (Internacional Terrestrial Reference Frame) establecido y mantenido por la IERS Baacutesicamente el sistema que materializa se define como geoceacutentrico (incluyendo la atmoacutesfera y los oceacuteanos) la base para la escala la constituye el metro (en el sistema Internacional) y con orientacioacuten de sus ejes tal como establecioacute la BIH en 1984
bull Eje Z Polo medio determinado por la IERS y llamado IERS Reference Pole (IRP) o Convencional Terrestrial Pole (CTP)
bull Eje X Meridiano de Greenwich Convencional determinado por la IERS y
llamado IERS Reference Meridian (IRM) o Greenwich Mean Origin (GMO)
bull Eje Y Formando una tripleta dextroacutegira con los ejes anteriores sobre el
plano del ecuador convencional El marco estaacute formado por coordenadas cartesianas y velocidades de una serie
de estaciones equipadas con teacutecnicas de observacioacuten espacial (VLBI SLR LLR GPS desde 1991 y DORIS desde 1994) en la figura 13 se pueden ver las estaciones para el ITRF2000 Si se desean coordenadas geodeacutesicas se recomienda el uso del elipsoide GRS80 Estas coordenadas definen impliacutecitamente el origen la escala y la orientacioacuten de los ejes coordenados X Y Z del sistema de referencia
La historia de los diferentes ITRF comenzoacute en 1984 y a partir de ahiacute se han obtenido las soluciones 88 89 90 91 92 93 94 96 97 2000 2005 y recientemente la 2008 estas soluciones difieren unas de otras debido a la incorporacioacuten constante de nuevas estaciones nuevas observaciones en las estaciones ya existentes mejora en la precisioacuten de las mismas o nuevos meacutetodos de procesamiento
Figura 12 Sistema geodeacutesico local
Geoide
Elipsoide
X
Y
Z
X
Y
Zo
XoYo
a
b
o
PNbull
bull
(ξ η)
15
Cada una de las teacutecnicas (GPS VLBI LLR SLR o DORIS) genera su propio marco de referencia k con coordenadas y velocidades conocidas para cada estacioacuten i en cada eacutepoca ts de observacioacuten por lo tanto las soluciones de las teacutecnicas se deben
combinar para estimar las posiciones y velocidades en el marco ITRF ( iITRFX y
i
ITRFXbull
) en una eacutepoca de referencia t0 para cada estacioacuten i asiacute como los paraacutemetros de transformacioacuten (factor de escala Dk vector de traslaciones Tk en X Y Z y matriz de
rotaciones Rk sobre los ejes X YZ) y sus variaciones ( KDbull
KTbull
KRbull
) entre el marco ITRF (marco final combinacioacuten de todos los k) y el correspondiente k paraacutemetros que a su vez pueden estar referidos a un eacutepoca tK diferente de las anteriores La combinacioacuten general se ajusta a las ecuaciones
( ) ( )( )
01
i i i i i i i i iks ITRF s ITRF k k ITRF k ITRF s k k ITRF k ITRF
i i i is ITRF k k ITRF k ITRF
X X t t X T D X R X t t T D X R X
X X T D X R X
bull bull bull bull
bull bull bull bull bull
= + minus + + + + minus + +
= + + + La segunda ecuacioacuten se obtiene a partir de derivar la primera y considerar que las derivadas segundas son nulas (aceleracioacuten nula) y que la derivada de i
ITRFX (sobre 10 centiacutemetros por antildeo como media) multiplicada por DK o RK (que son del orden de 10-5) tambieacuten se pueden despreciar Este sistema de ecuaciones es vaacutelido para
bull Observaciones bajo la forma de serie temporal de coordenadas (por ejemplo soluciones semanales para cada estacioacuten y por tanto en su correspondiente eacutepoca ts para una determinada teacutecnica espacial) por lo que la segunda ecuacioacuten (velocidad) del sistema (1) no se utiliza y donde la solucioacuten no es maacutes que la acumulacioacuten de eacutepocas de observacioacuten
bull Observaciones bajo la forma de paraacutemetros globales (coordenadas y
velocidades) vaacutelidos para un intervalo de tiempo elevado (varios antildeos) y
Figura 13 Estaciones que forman el ITRF2000 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
16
centrado en una eacutepoca tk (que puede coincidir o no con la t0 para cada una de las teacutecnicas espaciales)
La conexioacuten entre las diferentes teacutecnicas de observacioacuten se realiza en aquellas estaciones (collocation sites) que posean dos o maacutes teacutecnicas de observacioacuten y sea posible la determinacioacuten precisa (plusmn4-5 mm de error) de los incrementos de coordenadas X Y Z (local ties) entre los instrumentos de medida (receptores GPS o DORIS telescopios y radiotelescopios) utilizando mediciones topograacuteficas o con GPS En cada una de estas estaciones se genera una solucioacuten maacutes de acuerdo con las ecuaciones (1) teniendo en cuenta los incrementos de coordenadas es decir si una estacioacuten posee instrumental VLBI y SLR y se han medido las diferencias entre los dos instrumentos de forma precisa (incrementos de X Y Z) se genera una ecuacioacuten del tipo (1) para la solucioacuten VLBI otra para la SLR y otra con los incrementos observados (por ejemplo la solucioacuten VLBI maacutes los incrementos de manera que se estaacuten dando coordenadas en el marco VLBI a la estacioacuten SLR) El establecimiento de un marco de referencia de precisioacuten no es tarea sencilla ya que la Tierra sufre deformaciones debido a su caraacutecter elaacutestico y las precisiones de las observaciones son cada vez mayores por lo que las observaciones deben ser corregidas por los efectos de
bull Mareas terrestres bull Carga atmosfeacuterica y oceaacutenica
bull Tectoacutenica de placas El modelo utilizado hasta el ITRF2005 (incluido) es el
NNR-NUVEL-1A basado en que no existen rotaciones sobre el manto de las placas tectoacutenicas y por tanto la suma de las velocidades de las placas sobre toda la Tierra es cero Para el ITRF2008 se utiliza un modelo basado en las propias velocidades de las estaciones ITRF observadas con teacutecnicas espaciales el APKIM2005 (las velocidades presentan tambieacuten error ya que se obtienen a partir de caacutelculos)
bull Movimientos locales y regionales Un ejemplo seriacutea el rebote postglacial de
Escandinavia
Por tanto y tal como se pude ver en la tabla 3 el ITRF es un marco dinaacutemico que cambia de acuerdo a las variaciones temporales de las coordenadas y velocidades debido a los efectos anteriores
251- ITRF2000 ITRF2005 e ITRF2008
El marco ITRF2000 estaacute basado en 800 determinaciones en cerca de 500 sitios figura 13 estaacute referido a la eacutepoca 19970 (t0=19970) quedando determinado a partir de soluciones globales para cada marco k en una eacutepoca de referencia tk Para resolver el sistema de ecuaciones (1) es necesario fijar el datum de alguna manera el datum de la solucioacuten ITRF2000 quedoacute definido de la siguiente manera
bull Escala Media ponderada de determinadas medidas VLBI y SLR de alta
precisioacuten Esto se materializa fijando a cero el valor de escala y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 y las estaciones seleccionadas
bull Oriacutegen Media ponderada de determinaciones SLR (el centro de la oacuterbita de los
sateacutelites corresponderaacute al geocentro terrestre) Esto se materializa fijando a cero el valor del vector de traslacioacuten y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 las estaciones seleccionadas
17
bull Orientacioacuten Seleccioacuten de determinadas estaciones ITRF (sus coordenadas y velocidades) de alta calidad geodeacutesica que cumpla con los siguientes criterios
1 Que posea observaciones continuas al menos de los 3 uacuteltimos antildeos 2 Localizado en plataforma riacutegida y lejos de zonas de deformacioacuten 3 Que se haya determinado la velocidad con una precisioacuten mejor a
3mmantildeo 4 Que la velocidad sea menor a 3mmantildeo
Basado en estos criterios las 54 estaciones seleccionadas se pueden ver en la figura 14 como puntos azules En el sistema de ecuaciones (1) se introduce una ecuacioacuten de condicioacuten de forma que para estos puntos seleccionados exista correspondencia entre la orientacioacuten del marco de referencia y la del marco de referencia anterior (ITRF19970 por lo que no seraacuten maacutes que las definidas en la orientacioacuten BIH para 19840) La variacioacuten en la orientacioacuten (variacioacuten de estas coordenadas) seraacute la del modelo NNR-NUVEL-1A
El marco ITRF2005 referido a la eacutepoca 20000 (t0=20000) se ha basado
uacutenicamente en determinaciones SLR VLBI DORIS y GPS en 608 estaciones situadas en 338 localizaciones diferentes figura 15 quedando definido a partir de series temporales continuas de observaciones (soluciones semanales para GPS entre 1996 y 2005 DORIS entre 1993 y 2005 y SLR entre 1993 y 2005 y sesiones diarias para VLBI entre 1981 y 2005) de esta manera se puede realizar un anaacutelisis maacutes riguroso de las observaciones y detectar aquellas que presenten error o discontinuidades en las series Cada eacutepoca genera sistema de ecuaciones (1) para cada teacutecnica y en caso de que una estacioacuten presente una discontinuidad en la serie una nueva posicioacuten y velocidad se deben calcular para esa estacioacuten por lo que las coordenadas y velocidades calculadas lo seraacuten para un cierto intervalo de tiempo El datum se define de la siguiente manera
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20000) y variacioacuten nula
de estos paraacutemetros entre ITRF2005 y las series SLR bull Escala Factor de escala nulo (para la eacutepoca 20000) y variacioacuten nula entre
ITRF2005 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20000) y variaciones nulas entre ITRF2005 y ITRF2000 (en las estaciones ITRF seleccionadas)
Figura 14 En azul se muestran los 54 puntos de la ITRF que cumplen con los 4 criterios y en rojo los que cumplen con los criterios 1 3 y 4
18
En la tabla 1 se pueden ver los paraacutemetros de transformacioacuten entre el marco ITRF2005 y el ITRF2000 usando 70 estaciones especiacuteficas para su caacutelculo (las mismas que las utilizadas para orientar el ITRF2005 al ITRF2000 por lo que no existen paraacutemetros de rotacioacuten en esta transformacioacuten) Los resultados muestran las traslaciones del geocentro en miliacutemetros y el factor de escala en partes por billoacuten (con la notacioacuten americana es decir 10-9) asiacute como sus variaciones temporales (miliacutemetrosantildeo y ppbantildeo) Los resultados de la transformacioacuten muestran una variacioacuten temporal de 18 miliacutemetros por antildeo entre ITRF2005 e ITRF2000 esta velocidad de movimiento del geocentro no genera la estabilidad deseada del marco de referencia por lo que este marco se debe cambiar raacutepidamente Se cree que este movimiento se debe a la reduccioacuten de estaciones SLR con el tiempo asiacute como a su mala distribucioacuten geograacutefica (muchas maacutes en el hemisferio Norte que en el Sur) asiacute como la utilizacioacuten de diferentes modelos de procesamiento SLR para la solucioacuten ITRF2005 y la ITRF2000
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) 01 -08 -58 040 -02 01 -18 008
En base a esta uacuteltima conclusioacuten el marco ITRF2008 referido a la eacutepoca 20050 (t0=20050) se basa en el reprocesamiento de todas las series de observaciones de las cuatro teacutecnicas espaciales utilizadas (VLBI entre 1980 y 2009 GPSGNSS entre 1997 y 2009 SLR entre 1983 y 2009 DORIS entre 1993 y 2009) de manera que utilicen estaacutendares actuales e ideacutenticos y el mismo software para la reduccioacuten modelizacioacuten y correccioacuten de observaciones (modelos de troposfera e ionosfera centros de fase de emisioacuten de los sateacutelites y receptores etc) De esta manera el marco ITRF conservaraacute su definicioacuten a lo largo del tiempo en cuanto a origen escala y orientacioacuten (se produciraacuten series temporales de observaciones homogeacuteneas) por lo que los estudios de deformacioacuten dinaacutemica terrestre saldraacuten beneficiados (por ejemplo es esencial para el estudio del nivel medio del mar y su variacioacuten global y regional que el marco de referencia se defina siempre igual) 608 estaciones situadas en 338 localizaciones diferentes constituyen el marco El datum ITRF2008 se define de la siguiente manera
Figura 15 Estaciones que forman el ITRF2005 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
Tabla 1 Paraacutemetros de transformacioacuten entre los marcos ITRF2005 e ITRF2000 los paraacutemetros de rotacioacuten y sus variaciones son cero
19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

6
el hemisferio oriental y de 0ordm a -180ordm en el hemisferio occidental es decir el primero al este y el segundo al oeste
223- Sistema de coordenadas geodeacutesicas y geoceacutentricas Sistema de referencia geodeacutesico La segunda aproximacioacuten a la forma de la Tierra es un elipsoide de revolucioacuten definido por su semieje mayor (a) y su semieje menor (b) o aplanamiento (f) El centro del elipsoide coincide con el centro del sistema de referencia es decir con el geocentro y el semieje menor se hace coincidir con el eje de rotacioacuten terrestre quedando asiacute constituido el sistema de coordenadas geodeacutesico
La vertical geodeacutesica en un punto de la superficie del elipsoide de revolucioacuten coincide con la direccioacuten del vector normal al elipsoide en dicho punto y por tanto no pasa por el centro del elipsoide figura 5
Asiacute las coordenadas geodeacutesicas seraacuten
bull Latitud geodeacutesica es el aacutengulo que forma la vertical geodeacutesica del punto con el
plano ecuador geodeacutesico
bull Longitud geodeacutesica es el aacutengulo formado por el meridiano geodeacutesico del punto de caacutelculo y el meridiano geodeacutesico origen
Introducimos en este momento las coordenadas geoceacutentricas ya que sobre el
elipsoide no coincidiraacuten con las geodeacutesicas en este caso la longitud geoceacutentrica seraacute igual a la geodeacutesica pero la latitud geoceacutentrica (β) seraacute el aacutengulo entre la liacutenea que une el centro del elipsoide y un punto sobre el elipsoide y el ecuador geodeacutesico
Figura 4 Coordenadas Geograacuteficas
7
ββ
224- Sistema de coordenadas astronoacutemicas Sistema de referencia graviacutefico Las observaciones astronoacutemicas geodeacutesicas y topograacuteficas se efectuacutean sobre la
superficie real de la Tierra y en un momento de tiempo determinado asiacute se debe retocar el concepto de figura y forma de la Tierra y pasar a la definicioacuten de geoide como figura y situar las observaciones en un momento determinado
El geoide se define como superficie equipotencial respecto a la gravedad y
normal a su direccioacuten siendo esta direccioacuten normal la de la fuerza de gravedad que seraacute la que sigue un rayo oacuteptico de un instrumento topograacutefico cuando se estaciona o liacutenea de la plomada Debido a la distribucioacuten no homogeacutenea de masas en el interior de la Tierra y a la forma achatada por los polos esta liacutenea no coincidiraacute ni con la vertical geograacutefica ni con la geodeacutesica ni con la geoceacutentrica figura 6 Asiacute se puede definir
bull Dado un punto P de la superficie topograacutefica terrestre se denomina vertical
astronoacutemica instantaacutenea de P a la recta tangente en P a la liacutenea de la plomada en ese punto
bull Se denomina plano ecuador astronoacutemico instantaacuteneo al plano perpendicular al
eje instantaacuteneo de rotacioacuten que pasa por el centro de masas de la Tierra
bull Se llama plano meridiano astronoacutemico instantaacuteneo de P al plano que contiene a la vertical astronoacutemica de P y al eje instantaacuteneo de rotacioacuten terrestre
Definieacutendose las coordenadas astronoacutemicas instantaacuteneas como
bull Latitud astronoacutemica de P es el aacutengulo Ф que forma la vertical astronoacutemica de P con el plano del ecuador astronoacutemico instantaacuteneo Variacutea de 0ordm a 90ordm en el hemisferio astronoacutemico norte y de 0ordm a -90ordm en el hemisferio astronoacutemico sur
bull Longitud astronoacutemica de P es el aacutengulo Λ que forma el plano meridiano
astronoacutemico instantaacuteneo de P con el plano meridiano astronoacutemico instantaacuteneo tomando como origen (Greenwich) Se suele considerar de 0ordm a 360ordm positiva al este
Figura 5 Coordenadas geodeacutesicas y geoceacutentricas
8
23- Movimiento del polo Coordenadas instantaacuteneas y absolutas
La direccioacuten del eje de rotacioacuten terrestre cambia con el tiempo respecto a la propia superficie terrestre y por tanto respecto al sistema de referencia geoceacutentrico terrestre
El polo describe a lo largo del tiempo una trayectoria libre que es una curva
maacutes o menos circular de radio 6 metros figura 7 y periodo aproximado de 430 diacuteas provocado por el caraacutecter deformable de la Tierra redistribuciones interiores de las masas terrestres efectos del rebote postglaciar en Canadaacute y Fenoscandia movimientos tectoacutenicos redistribuciones atmosfeacutericas etc figura 8
Superpuesta a eacutesta trayectoria libre se encuentran una serie de oscilaciones
forzadas provocadas por la influencia gravitatoria del Sol y la Luna con una magnitud de 60 centiacutemetros figura 7
Eje Instantaneo de Rotacioacuten
Meridiano Instantaneode Greenwich
Eje Z
Eje X
Eje YCentro de Masas
Liacutenea Vertical (Plomada)
Tangente a la vertical por el punto P
Vector de gravedad
Superficie equipotencial de P (WP)
P
Λ Φ
Eje Instantaneo de Rotacioacuten
Meridiano Instantaneode Greenwich
Eje Z
Eje X
Eje YCentro de Masas
Liacutenea Vertical (Plomada)
Tangente a la vertical por el punto P
Vector de gravedad
Superficie equipotencial de P (WP)
P
Λ Φ
Figura 6 Coordenadas Astronoacutemicas
9
Este movimiento del polo afecta directamente a las coordenadas de los puntos sobre la superficie terrestre ya que el sistema de referencia iraacute cambiando Lo maacutes indicado es tomar como eje Z de referencia el origen o centro de los ciacuterculos de movimiento libre quedando asiacute determinado el eje Z de un modo convencional Si las coordenadas de los puntos se refieren al polo convencional tendremos coordenadas absolutas si se refieren al polo instantaacuteneo (situacioacuten del eje de rotacioacuten en un determinado momento) tendremos coordenadas instantaacuteneas
No hay teoriacutea cientiacutefica que pueda predecir el movimiento del polo y por lo
tanto su posicioacuten asiacute que se monitoriza continuamente mediante observaciones Esta materializacioacuten se realizaba con observaciones astronoacutemicas lo que dio lugar al establecimiento de tres polos diferentes
bull Polo CIO desde 1899 la International Latitude Service (ILS) utilizando
observaciones astronoacutemicas sobre cinco estaciones en un mismo paralelo (φ = 39ordm 08rsquo) llegoacute a la definicioacuten del polo CIO (Convencional International Origen) definido como la posicioacuten media del polo entre 1900 y 1905 de manera que se obtuvieron determinaciones precisas de
6 m
60 cm
O
6 m
60 cm
O
Figura 7 Movimiento libre y oscilaciones forzadas que cuya suma describe el movimiento del polo
Figura 8 Causas del movimiento del polo
10
los largos periacuteodos del movimiento del polo (su situacioacuten antildeo a antildeo figura 9) La precisioacuten de estas determinaciones se cifroacute en 3 metros
bull Polo BIH (Bureau International de lrsquoHeure) Por otro lado el eje X del
sistema de referencia geoceacutentrico terrestre convencional se determinoacute a partir de las longitudes de 50 estaciones por la BIH creada en 1912 para mantener la escala de tiempo uniforme es decir era el organismo encargado del mantenimiento de la hora y de la posicioacuten del origen de longitudes (posicioacuten media del observatorio astronoacutemico de greenwich) a traveacutes de determinacioacuten de la longitud astronoacutemica de los observatorios pertenecientes a este organismo La determinacioacuten de la latitud de estos observatorios generoacute el polo BIH que proporcionaba estimaciones maacutes frecuentes (medias de 5 diacuteas) y precisiones de 1 metro en la determinacioacuten del movimiento del polo
bull Polo IPMS Cada vez con maacutes frecuencia se empezoacute a necesitar los
movimientos de corto periodo del polo para aplicaciones geodeacutesicas y astronoacutemicas figura 9 por lo que el ILS se reorganizoacute en 1962 en el Internacional Polar Motion Service (IPMS) asiacute surge el polo IPMS generado a partir de determinaciones de latitud astronoacutemica en 80 estaciones y con precisioacuten de un metro en la determinacioacuten del movimiento del polo
En 1967 el polo CIO es aceptado como estaacutendar por la International
Astronomical Union para dar asiacute continuidad a las observaciones maacutes antiguas eferidas al polo CIO por lo que los polos BIH e IPMS se intentan referenciar al polo CIO esto no es posible debido a las precisiones de los diferentes polos ya que se trata de la determinacioacuten de un ciacuterculo aproximadamente de 6 metros de diaacutemetro que queda definido con 3 metros de error en el polo CIO y con un metro en los otros dos es decir en realidad con estas precisiones se estaacute hablando del mismo polo
La situacioacuten se complica a partir de ese antildeo debido a la irrupcioacuten de la
geodesia por sateacutelite Se empiezan a utilizar medidas a sateacutelite para la determinacioacuten del movimiento del polo en concreto medidas Doppler a los sateacutelites de la constelacioacuten TRANSIT alcanzando precisiones de 02 metros
En los antildeos siguientes nuevas teacutecnicas espaciales demuestran la precisioacuten de
las mismas en la determinacioacuten del movimiento del polo medidas laacuteser a sateacutelites o a la Luna VLBI GPS DORIS PRARE Todas estas teacutecnicas se basan en la medicioacuten continua de coordenadas por lo que la monitorizacioacuten del polo es permanente y su precisioacuten se reduce hasta los 6-8 centiacutemetros
Figura 9 Movimientos de largo y corto periodo del polo
11
Asiacute en 1984 la BIH establecioacute un nuevo sistema de referencia terrestre basado
en las coordenadas cartesianas geoceacutentricas de las estaciones fundamentales donde teacutecnicas espaciales habiacutean sido aplicadas este nuevo sistema coincide con el polo CIO astronoacutemico si se tienen en cuanta las precisiones en la determinacioacuten del CIO lo cual permite dar continuidad a las coordenadas determinadas antiguamente
Finalmente en 1987 se creoacute la Internacional Earth Rotacion Service (IERS)
reemplazando a la BIH y a la IPMS para entre otras cosas monitorizar el movimiento del polo basaacutendose en teacutecnicas espaciales de forma continua (obtencioacuten del polo instantaacuteneo figura 10) con lo que el polo BIH determinado en 1984 pasoacute a llamarse polo IERS Desde abril de 2003 el nombre fue cambiado al de Internacional Earth Rotation and Reference Systems Service (IERS) proporcionando las coordenadas instantaacuteneas del polo para cada diacutea referidas al polo IERS cuyo eje X seraacute el meridiano de Greenwich convencional y el eje Y estaacute situado hacia el Oeste (direccioacuten de su sentido positivo) formando 90 grados las unidades de estas coordenadas son segundos de arco figura 11
En las paacuteginas httpwwwiersorg y httphpiersobspmfr se puede
encontrar mucha maacutes informacioacuten Como se ha dicho las mediciones se realizan en un momento determinado (t)
conociendo a traveacutes de los valores proporcionados por la IERS los valores para el movimiento del polo se podraacuten transformar los valores de latitud y longitud instantaacuteneos a valores de latitud y longitud absolutos sobre el sistema de referencia
Figura 10 Polo instantaacuteneo en lila y polo medio en amarillo
Figura 11 Sistema de referencia y coordenadas en las que se expresa el movimiento del polo
12
geoceacutentrico terrestre convencional Los valores de esta correccioacuten rondan los 01 segundos
24- Sistemas de referencia geodeacutesicos
241- Sistemas de referencia geodeacutesicos globales GRS80 y WGS84
Se definiraacute daacutetum como el conjunto de paraacutemetros que definen la posicioacuten de
un elipsoide respecto a la tierra Para determinarlo hace falta conocer la geometriacutea del elipsoide a y f su posicioacuten respecto al geocentro ∆X ∆Y ∆Z (coordenadas del centro del elipsoide respecto al geocentro) su orientacioacuten R1 R2 R3 (orientacioacuten de los ejes del elipsoide respecto a los terrestres) y la escala k
Si ∆X = ∆Y = ∆Z = 0 el daacutetum Geodeacutesico se llama Global o absoluto El Geodetic Reference System 1980 (GRS80) adoptado por la IUGG
(International Union of Geodesy and Geophysics) por su asamblea general de Camberra en 1979 pertenece a este grupo
Este sistema reemplaza al GRS67 por no representar adecuadamente el
tamantildeo forma y el campo gravitatorio con precisioacuten suficiente para la mayoriacutea de aplicaciones geodeacutesicas geofiacutesicas astronoacutemicas e hidrograacuteficas
Los principales paraacutemetros del sistema son
a = 6378137 m (Obtenido a partir de medidas SLR y Doppler) J2 = 10826310-8 (Obtenido a partir de perturbaciones en la oacuterbita de sateacutelites) GM = 3986005108 m3sg2 (Obtenido a partir de SLR LLR y pruebas espaciales) ω = 729311510-11 rdsg (Obtenido a partir de medidas astronoacutemicas) La orientacioacuten del eje Z seraacute la definida por el polo CIO como eje X el meridiano 0 definido por la BIH y el eje Y formando la tripleta dextroacutegira Este sistema sigue en vigor y no se ha actualizado en su definicioacuten ya que se debe tener en cuenta que por debajo del metro en la diferencia de paraacutemetros no existe una diferencia praacutectica en la determinacioacuten de coordenadas Asiacute las mejoras del mismo se consideran avances cientiacuteficos pero el estaacutendar (GRS80) no se debe cambiar
Cuando la informacioacuten sobre el datum se obtiene a partir de posiciones dentro de la oacuterbita de los sateacutelites (determinacioacuten dinaacutemica del sistema) los coeficientes del potencial gravitatorio (J2) asiacute como algunas constantes (ω velocidad de la luz constante gravitatoria geoceacutentrica) forman parte de la definicioacuten del datum ya que se calculan todas juntas
Un ejemplo de eacuteste uacuteltimo grupo es el World Geodetic System 1984 (WGS84)
utilizado por la teacutecnica GPS y obtenido exclusivamente a partir de los datos de la constelacioacuten de sateacutelites GPS
Los valores de sus principales paraacutemetros son
a = 6378137 m
J2 = 108262998310-8
GM = 3986004418108 m3sg2
13
ω = 729311510-11 rdsg
1f = 298257223563
El World Geodetic System 1984 (WGS84) utiliza como eje Z el polo IERS como eje X el meridiano 0 definido por el IERS y el eje Y formando la tripleta dextroacutegira Su origen coincide con el geocentro
A nivel praacutectico tal como se puede deducir el GRS80 y el WGS84 se pueden
considerar ideacutenticos 242- Sistemas de referencia geodeacutesicos locales ED50 Si ∆X ne ∆Y ne∆Z ne 0 nos encontramos ante un datum local El marco local queda definido por siete paraacutemetros (o mejor dicho 6 maacutes una condicioacuten) valores para a y f (geometriacutea del elipsoide) valores de las desviaciones de la vertical (ξ η) y de la ondulacioacuten del geoide (distancia entre el elipsoide de referencia y el geoide) con estos tres paraacutemetros se obtiene la orientacioacuten del elipsoide el acimut geodeacutesico de una liacutenea y como condicioacuten que el semieje menor del elipsoide y el eje medio de rotacioacuten terrestre sean paralelos Ademaacutes se intenta que el elipsoide se ajuste lo maacuteximo posible a la zona a cartografiar de manera que la reduccioacuten de observaciones sea lo maacutes sencilla posible Un ejemplo de este tipo de sistemas es el ED-50 (European Datum de 1950) sistema al que estaacute referida toda la cartografiacutea espantildeola Este sistema adoptoacute el elipsoide de Hayford o Internacional introducido por la IUGG en su asamblea general de 1924 en Madrid donde a y f fueron obtenidas a partir de mediciones astronoacutemicas y geodeacutesicas en los Estados Unidos a = 6378388 f = 1297 Como punto fundamental se adoptoacute Potsdam lugar donde la desviacioacuten de la vertical (diferencia angular entre la vertical geodeacutesica y astronoacutemica) y la ondulacioacuten del geoide son conocidas (ξ = 3rdquo36 η = 1rdquo78 N = 0) de manera que el elipsoide queda orientado respecto a la Tierra Cabe destacar que fijar los valores de la desviacioacuten de la vertical (ξ η) y el valor de la ondulacioacuten del geoide N en el punto fundamental para orientar el elipsoide es equivalente a fijarlo a partir de las coordenadas X Y Z de su centro respecto al geocentro figura 12 La exactitud de ED50 oscila entre unos pocos metros en el centro de Europa a maacutes de 10 en el sur aunque su precisioacuten relativa es mucho mayor y maacutes que suficiente para los levantamientos cartograacuteficos de pequentildeas y medianas escalas por lo que en 1968 el Servicio Geograacutefico del ejeacutercito lo adopta para su cartografiacutea baacutesica 150000 e igualmente el IGN en 1979
14
25- Marco de referencia terrestre internacional (ITRF) El sistema de referencia terrestre internacional convencional se materializa a traveacutes de las coordenadas de una serie de estaciones distribuidas por todo el mundo en ese sistema de referencia constituyendo el ITRF (Internacional Terrestrial Reference Frame) establecido y mantenido por la IERS Baacutesicamente el sistema que materializa se define como geoceacutentrico (incluyendo la atmoacutesfera y los oceacuteanos) la base para la escala la constituye el metro (en el sistema Internacional) y con orientacioacuten de sus ejes tal como establecioacute la BIH en 1984
bull Eje Z Polo medio determinado por la IERS y llamado IERS Reference Pole (IRP) o Convencional Terrestrial Pole (CTP)
bull Eje X Meridiano de Greenwich Convencional determinado por la IERS y
llamado IERS Reference Meridian (IRM) o Greenwich Mean Origin (GMO)
bull Eje Y Formando una tripleta dextroacutegira con los ejes anteriores sobre el
plano del ecuador convencional El marco estaacute formado por coordenadas cartesianas y velocidades de una serie
de estaciones equipadas con teacutecnicas de observacioacuten espacial (VLBI SLR LLR GPS desde 1991 y DORIS desde 1994) en la figura 13 se pueden ver las estaciones para el ITRF2000 Si se desean coordenadas geodeacutesicas se recomienda el uso del elipsoide GRS80 Estas coordenadas definen impliacutecitamente el origen la escala y la orientacioacuten de los ejes coordenados X Y Z del sistema de referencia
La historia de los diferentes ITRF comenzoacute en 1984 y a partir de ahiacute se han obtenido las soluciones 88 89 90 91 92 93 94 96 97 2000 2005 y recientemente la 2008 estas soluciones difieren unas de otras debido a la incorporacioacuten constante de nuevas estaciones nuevas observaciones en las estaciones ya existentes mejora en la precisioacuten de las mismas o nuevos meacutetodos de procesamiento
Figura 12 Sistema geodeacutesico local
Geoide
Elipsoide
X
Y
Z
X
Y
Zo
XoYo
a
b
o
PNbull
bull
(ξ η)
15
Cada una de las teacutecnicas (GPS VLBI LLR SLR o DORIS) genera su propio marco de referencia k con coordenadas y velocidades conocidas para cada estacioacuten i en cada eacutepoca ts de observacioacuten por lo tanto las soluciones de las teacutecnicas se deben
combinar para estimar las posiciones y velocidades en el marco ITRF ( iITRFX y
i
ITRFXbull
) en una eacutepoca de referencia t0 para cada estacioacuten i asiacute como los paraacutemetros de transformacioacuten (factor de escala Dk vector de traslaciones Tk en X Y Z y matriz de
rotaciones Rk sobre los ejes X YZ) y sus variaciones ( KDbull
KTbull
KRbull
) entre el marco ITRF (marco final combinacioacuten de todos los k) y el correspondiente k paraacutemetros que a su vez pueden estar referidos a un eacutepoca tK diferente de las anteriores La combinacioacuten general se ajusta a las ecuaciones
( ) ( )( )
01
i i i i i i i i iks ITRF s ITRF k k ITRF k ITRF s k k ITRF k ITRF
i i i is ITRF k k ITRF k ITRF
X X t t X T D X R X t t T D X R X
X X T D X R X
bull bull bull bull
bull bull bull bull bull
= + minus + + + + minus + +
= + + + La segunda ecuacioacuten se obtiene a partir de derivar la primera y considerar que las derivadas segundas son nulas (aceleracioacuten nula) y que la derivada de i
ITRFX (sobre 10 centiacutemetros por antildeo como media) multiplicada por DK o RK (que son del orden de 10-5) tambieacuten se pueden despreciar Este sistema de ecuaciones es vaacutelido para
bull Observaciones bajo la forma de serie temporal de coordenadas (por ejemplo soluciones semanales para cada estacioacuten y por tanto en su correspondiente eacutepoca ts para una determinada teacutecnica espacial) por lo que la segunda ecuacioacuten (velocidad) del sistema (1) no se utiliza y donde la solucioacuten no es maacutes que la acumulacioacuten de eacutepocas de observacioacuten
bull Observaciones bajo la forma de paraacutemetros globales (coordenadas y
velocidades) vaacutelidos para un intervalo de tiempo elevado (varios antildeos) y
Figura 13 Estaciones que forman el ITRF2000 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
16
centrado en una eacutepoca tk (que puede coincidir o no con la t0 para cada una de las teacutecnicas espaciales)
La conexioacuten entre las diferentes teacutecnicas de observacioacuten se realiza en aquellas estaciones (collocation sites) que posean dos o maacutes teacutecnicas de observacioacuten y sea posible la determinacioacuten precisa (plusmn4-5 mm de error) de los incrementos de coordenadas X Y Z (local ties) entre los instrumentos de medida (receptores GPS o DORIS telescopios y radiotelescopios) utilizando mediciones topograacuteficas o con GPS En cada una de estas estaciones se genera una solucioacuten maacutes de acuerdo con las ecuaciones (1) teniendo en cuenta los incrementos de coordenadas es decir si una estacioacuten posee instrumental VLBI y SLR y se han medido las diferencias entre los dos instrumentos de forma precisa (incrementos de X Y Z) se genera una ecuacioacuten del tipo (1) para la solucioacuten VLBI otra para la SLR y otra con los incrementos observados (por ejemplo la solucioacuten VLBI maacutes los incrementos de manera que se estaacuten dando coordenadas en el marco VLBI a la estacioacuten SLR) El establecimiento de un marco de referencia de precisioacuten no es tarea sencilla ya que la Tierra sufre deformaciones debido a su caraacutecter elaacutestico y las precisiones de las observaciones son cada vez mayores por lo que las observaciones deben ser corregidas por los efectos de
bull Mareas terrestres bull Carga atmosfeacuterica y oceaacutenica
bull Tectoacutenica de placas El modelo utilizado hasta el ITRF2005 (incluido) es el
NNR-NUVEL-1A basado en que no existen rotaciones sobre el manto de las placas tectoacutenicas y por tanto la suma de las velocidades de las placas sobre toda la Tierra es cero Para el ITRF2008 se utiliza un modelo basado en las propias velocidades de las estaciones ITRF observadas con teacutecnicas espaciales el APKIM2005 (las velocidades presentan tambieacuten error ya que se obtienen a partir de caacutelculos)
bull Movimientos locales y regionales Un ejemplo seriacutea el rebote postglacial de
Escandinavia
Por tanto y tal como se pude ver en la tabla 3 el ITRF es un marco dinaacutemico que cambia de acuerdo a las variaciones temporales de las coordenadas y velocidades debido a los efectos anteriores
251- ITRF2000 ITRF2005 e ITRF2008
El marco ITRF2000 estaacute basado en 800 determinaciones en cerca de 500 sitios figura 13 estaacute referido a la eacutepoca 19970 (t0=19970) quedando determinado a partir de soluciones globales para cada marco k en una eacutepoca de referencia tk Para resolver el sistema de ecuaciones (1) es necesario fijar el datum de alguna manera el datum de la solucioacuten ITRF2000 quedoacute definido de la siguiente manera
bull Escala Media ponderada de determinadas medidas VLBI y SLR de alta
precisioacuten Esto se materializa fijando a cero el valor de escala y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 y las estaciones seleccionadas
bull Oriacutegen Media ponderada de determinaciones SLR (el centro de la oacuterbita de los
sateacutelites corresponderaacute al geocentro terrestre) Esto se materializa fijando a cero el valor del vector de traslacioacuten y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 las estaciones seleccionadas
17
bull Orientacioacuten Seleccioacuten de determinadas estaciones ITRF (sus coordenadas y velocidades) de alta calidad geodeacutesica que cumpla con los siguientes criterios
1 Que posea observaciones continuas al menos de los 3 uacuteltimos antildeos 2 Localizado en plataforma riacutegida y lejos de zonas de deformacioacuten 3 Que se haya determinado la velocidad con una precisioacuten mejor a
3mmantildeo 4 Que la velocidad sea menor a 3mmantildeo
Basado en estos criterios las 54 estaciones seleccionadas se pueden ver en la figura 14 como puntos azules En el sistema de ecuaciones (1) se introduce una ecuacioacuten de condicioacuten de forma que para estos puntos seleccionados exista correspondencia entre la orientacioacuten del marco de referencia y la del marco de referencia anterior (ITRF19970 por lo que no seraacuten maacutes que las definidas en la orientacioacuten BIH para 19840) La variacioacuten en la orientacioacuten (variacioacuten de estas coordenadas) seraacute la del modelo NNR-NUVEL-1A
El marco ITRF2005 referido a la eacutepoca 20000 (t0=20000) se ha basado
uacutenicamente en determinaciones SLR VLBI DORIS y GPS en 608 estaciones situadas en 338 localizaciones diferentes figura 15 quedando definido a partir de series temporales continuas de observaciones (soluciones semanales para GPS entre 1996 y 2005 DORIS entre 1993 y 2005 y SLR entre 1993 y 2005 y sesiones diarias para VLBI entre 1981 y 2005) de esta manera se puede realizar un anaacutelisis maacutes riguroso de las observaciones y detectar aquellas que presenten error o discontinuidades en las series Cada eacutepoca genera sistema de ecuaciones (1) para cada teacutecnica y en caso de que una estacioacuten presente una discontinuidad en la serie una nueva posicioacuten y velocidad se deben calcular para esa estacioacuten por lo que las coordenadas y velocidades calculadas lo seraacuten para un cierto intervalo de tiempo El datum se define de la siguiente manera
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20000) y variacioacuten nula
de estos paraacutemetros entre ITRF2005 y las series SLR bull Escala Factor de escala nulo (para la eacutepoca 20000) y variacioacuten nula entre
ITRF2005 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20000) y variaciones nulas entre ITRF2005 y ITRF2000 (en las estaciones ITRF seleccionadas)
Figura 14 En azul se muestran los 54 puntos de la ITRF que cumplen con los 4 criterios y en rojo los que cumplen con los criterios 1 3 y 4
18
En la tabla 1 se pueden ver los paraacutemetros de transformacioacuten entre el marco ITRF2005 y el ITRF2000 usando 70 estaciones especiacuteficas para su caacutelculo (las mismas que las utilizadas para orientar el ITRF2005 al ITRF2000 por lo que no existen paraacutemetros de rotacioacuten en esta transformacioacuten) Los resultados muestran las traslaciones del geocentro en miliacutemetros y el factor de escala en partes por billoacuten (con la notacioacuten americana es decir 10-9) asiacute como sus variaciones temporales (miliacutemetrosantildeo y ppbantildeo) Los resultados de la transformacioacuten muestran una variacioacuten temporal de 18 miliacutemetros por antildeo entre ITRF2005 e ITRF2000 esta velocidad de movimiento del geocentro no genera la estabilidad deseada del marco de referencia por lo que este marco se debe cambiar raacutepidamente Se cree que este movimiento se debe a la reduccioacuten de estaciones SLR con el tiempo asiacute como a su mala distribucioacuten geograacutefica (muchas maacutes en el hemisferio Norte que en el Sur) asiacute como la utilizacioacuten de diferentes modelos de procesamiento SLR para la solucioacuten ITRF2005 y la ITRF2000
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) 01 -08 -58 040 -02 01 -18 008
En base a esta uacuteltima conclusioacuten el marco ITRF2008 referido a la eacutepoca 20050 (t0=20050) se basa en el reprocesamiento de todas las series de observaciones de las cuatro teacutecnicas espaciales utilizadas (VLBI entre 1980 y 2009 GPSGNSS entre 1997 y 2009 SLR entre 1983 y 2009 DORIS entre 1993 y 2009) de manera que utilicen estaacutendares actuales e ideacutenticos y el mismo software para la reduccioacuten modelizacioacuten y correccioacuten de observaciones (modelos de troposfera e ionosfera centros de fase de emisioacuten de los sateacutelites y receptores etc) De esta manera el marco ITRF conservaraacute su definicioacuten a lo largo del tiempo en cuanto a origen escala y orientacioacuten (se produciraacuten series temporales de observaciones homogeacuteneas) por lo que los estudios de deformacioacuten dinaacutemica terrestre saldraacuten beneficiados (por ejemplo es esencial para el estudio del nivel medio del mar y su variacioacuten global y regional que el marco de referencia se defina siempre igual) 608 estaciones situadas en 338 localizaciones diferentes constituyen el marco El datum ITRF2008 se define de la siguiente manera
Figura 15 Estaciones que forman el ITRF2005 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
Tabla 1 Paraacutemetros de transformacioacuten entre los marcos ITRF2005 e ITRF2000 los paraacutemetros de rotacioacuten y sus variaciones son cero
19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

7
ββ
224- Sistema de coordenadas astronoacutemicas Sistema de referencia graviacutefico Las observaciones astronoacutemicas geodeacutesicas y topograacuteficas se efectuacutean sobre la
superficie real de la Tierra y en un momento de tiempo determinado asiacute se debe retocar el concepto de figura y forma de la Tierra y pasar a la definicioacuten de geoide como figura y situar las observaciones en un momento determinado
El geoide se define como superficie equipotencial respecto a la gravedad y
normal a su direccioacuten siendo esta direccioacuten normal la de la fuerza de gravedad que seraacute la que sigue un rayo oacuteptico de un instrumento topograacutefico cuando se estaciona o liacutenea de la plomada Debido a la distribucioacuten no homogeacutenea de masas en el interior de la Tierra y a la forma achatada por los polos esta liacutenea no coincidiraacute ni con la vertical geograacutefica ni con la geodeacutesica ni con la geoceacutentrica figura 6 Asiacute se puede definir
bull Dado un punto P de la superficie topograacutefica terrestre se denomina vertical
astronoacutemica instantaacutenea de P a la recta tangente en P a la liacutenea de la plomada en ese punto
bull Se denomina plano ecuador astronoacutemico instantaacuteneo al plano perpendicular al
eje instantaacuteneo de rotacioacuten que pasa por el centro de masas de la Tierra
bull Se llama plano meridiano astronoacutemico instantaacuteneo de P al plano que contiene a la vertical astronoacutemica de P y al eje instantaacuteneo de rotacioacuten terrestre
Definieacutendose las coordenadas astronoacutemicas instantaacuteneas como
bull Latitud astronoacutemica de P es el aacutengulo Ф que forma la vertical astronoacutemica de P con el plano del ecuador astronoacutemico instantaacuteneo Variacutea de 0ordm a 90ordm en el hemisferio astronoacutemico norte y de 0ordm a -90ordm en el hemisferio astronoacutemico sur
bull Longitud astronoacutemica de P es el aacutengulo Λ que forma el plano meridiano
astronoacutemico instantaacuteneo de P con el plano meridiano astronoacutemico instantaacuteneo tomando como origen (Greenwich) Se suele considerar de 0ordm a 360ordm positiva al este
Figura 5 Coordenadas geodeacutesicas y geoceacutentricas
8
23- Movimiento del polo Coordenadas instantaacuteneas y absolutas
La direccioacuten del eje de rotacioacuten terrestre cambia con el tiempo respecto a la propia superficie terrestre y por tanto respecto al sistema de referencia geoceacutentrico terrestre
El polo describe a lo largo del tiempo una trayectoria libre que es una curva
maacutes o menos circular de radio 6 metros figura 7 y periodo aproximado de 430 diacuteas provocado por el caraacutecter deformable de la Tierra redistribuciones interiores de las masas terrestres efectos del rebote postglaciar en Canadaacute y Fenoscandia movimientos tectoacutenicos redistribuciones atmosfeacutericas etc figura 8
Superpuesta a eacutesta trayectoria libre se encuentran una serie de oscilaciones
forzadas provocadas por la influencia gravitatoria del Sol y la Luna con una magnitud de 60 centiacutemetros figura 7
Eje Instantaneo de Rotacioacuten
Meridiano Instantaneode Greenwich
Eje Z
Eje X
Eje YCentro de Masas
Liacutenea Vertical (Plomada)
Tangente a la vertical por el punto P
Vector de gravedad
Superficie equipotencial de P (WP)
P
Λ Φ
Eje Instantaneo de Rotacioacuten
Meridiano Instantaneode Greenwich
Eje Z
Eje X
Eje YCentro de Masas
Liacutenea Vertical (Plomada)
Tangente a la vertical por el punto P
Vector de gravedad
Superficie equipotencial de P (WP)
P
Λ Φ
Figura 6 Coordenadas Astronoacutemicas
9
Este movimiento del polo afecta directamente a las coordenadas de los puntos sobre la superficie terrestre ya que el sistema de referencia iraacute cambiando Lo maacutes indicado es tomar como eje Z de referencia el origen o centro de los ciacuterculos de movimiento libre quedando asiacute determinado el eje Z de un modo convencional Si las coordenadas de los puntos se refieren al polo convencional tendremos coordenadas absolutas si se refieren al polo instantaacuteneo (situacioacuten del eje de rotacioacuten en un determinado momento) tendremos coordenadas instantaacuteneas
No hay teoriacutea cientiacutefica que pueda predecir el movimiento del polo y por lo
tanto su posicioacuten asiacute que se monitoriza continuamente mediante observaciones Esta materializacioacuten se realizaba con observaciones astronoacutemicas lo que dio lugar al establecimiento de tres polos diferentes
bull Polo CIO desde 1899 la International Latitude Service (ILS) utilizando
observaciones astronoacutemicas sobre cinco estaciones en un mismo paralelo (φ = 39ordm 08rsquo) llegoacute a la definicioacuten del polo CIO (Convencional International Origen) definido como la posicioacuten media del polo entre 1900 y 1905 de manera que se obtuvieron determinaciones precisas de
6 m
60 cm
O
6 m
60 cm
O
Figura 7 Movimiento libre y oscilaciones forzadas que cuya suma describe el movimiento del polo
Figura 8 Causas del movimiento del polo
10
los largos periacuteodos del movimiento del polo (su situacioacuten antildeo a antildeo figura 9) La precisioacuten de estas determinaciones se cifroacute en 3 metros
bull Polo BIH (Bureau International de lrsquoHeure) Por otro lado el eje X del
sistema de referencia geoceacutentrico terrestre convencional se determinoacute a partir de las longitudes de 50 estaciones por la BIH creada en 1912 para mantener la escala de tiempo uniforme es decir era el organismo encargado del mantenimiento de la hora y de la posicioacuten del origen de longitudes (posicioacuten media del observatorio astronoacutemico de greenwich) a traveacutes de determinacioacuten de la longitud astronoacutemica de los observatorios pertenecientes a este organismo La determinacioacuten de la latitud de estos observatorios generoacute el polo BIH que proporcionaba estimaciones maacutes frecuentes (medias de 5 diacuteas) y precisiones de 1 metro en la determinacioacuten del movimiento del polo
bull Polo IPMS Cada vez con maacutes frecuencia se empezoacute a necesitar los
movimientos de corto periodo del polo para aplicaciones geodeacutesicas y astronoacutemicas figura 9 por lo que el ILS se reorganizoacute en 1962 en el Internacional Polar Motion Service (IPMS) asiacute surge el polo IPMS generado a partir de determinaciones de latitud astronoacutemica en 80 estaciones y con precisioacuten de un metro en la determinacioacuten del movimiento del polo
En 1967 el polo CIO es aceptado como estaacutendar por la International
Astronomical Union para dar asiacute continuidad a las observaciones maacutes antiguas eferidas al polo CIO por lo que los polos BIH e IPMS se intentan referenciar al polo CIO esto no es posible debido a las precisiones de los diferentes polos ya que se trata de la determinacioacuten de un ciacuterculo aproximadamente de 6 metros de diaacutemetro que queda definido con 3 metros de error en el polo CIO y con un metro en los otros dos es decir en realidad con estas precisiones se estaacute hablando del mismo polo
La situacioacuten se complica a partir de ese antildeo debido a la irrupcioacuten de la
geodesia por sateacutelite Se empiezan a utilizar medidas a sateacutelite para la determinacioacuten del movimiento del polo en concreto medidas Doppler a los sateacutelites de la constelacioacuten TRANSIT alcanzando precisiones de 02 metros
En los antildeos siguientes nuevas teacutecnicas espaciales demuestran la precisioacuten de
las mismas en la determinacioacuten del movimiento del polo medidas laacuteser a sateacutelites o a la Luna VLBI GPS DORIS PRARE Todas estas teacutecnicas se basan en la medicioacuten continua de coordenadas por lo que la monitorizacioacuten del polo es permanente y su precisioacuten se reduce hasta los 6-8 centiacutemetros
Figura 9 Movimientos de largo y corto periodo del polo
11
Asiacute en 1984 la BIH establecioacute un nuevo sistema de referencia terrestre basado
en las coordenadas cartesianas geoceacutentricas de las estaciones fundamentales donde teacutecnicas espaciales habiacutean sido aplicadas este nuevo sistema coincide con el polo CIO astronoacutemico si se tienen en cuanta las precisiones en la determinacioacuten del CIO lo cual permite dar continuidad a las coordenadas determinadas antiguamente
Finalmente en 1987 se creoacute la Internacional Earth Rotacion Service (IERS)
reemplazando a la BIH y a la IPMS para entre otras cosas monitorizar el movimiento del polo basaacutendose en teacutecnicas espaciales de forma continua (obtencioacuten del polo instantaacuteneo figura 10) con lo que el polo BIH determinado en 1984 pasoacute a llamarse polo IERS Desde abril de 2003 el nombre fue cambiado al de Internacional Earth Rotation and Reference Systems Service (IERS) proporcionando las coordenadas instantaacuteneas del polo para cada diacutea referidas al polo IERS cuyo eje X seraacute el meridiano de Greenwich convencional y el eje Y estaacute situado hacia el Oeste (direccioacuten de su sentido positivo) formando 90 grados las unidades de estas coordenadas son segundos de arco figura 11
En las paacuteginas httpwwwiersorg y httphpiersobspmfr se puede
encontrar mucha maacutes informacioacuten Como se ha dicho las mediciones se realizan en un momento determinado (t)
conociendo a traveacutes de los valores proporcionados por la IERS los valores para el movimiento del polo se podraacuten transformar los valores de latitud y longitud instantaacuteneos a valores de latitud y longitud absolutos sobre el sistema de referencia
Figura 10 Polo instantaacuteneo en lila y polo medio en amarillo
Figura 11 Sistema de referencia y coordenadas en las que se expresa el movimiento del polo
12
geoceacutentrico terrestre convencional Los valores de esta correccioacuten rondan los 01 segundos
24- Sistemas de referencia geodeacutesicos
241- Sistemas de referencia geodeacutesicos globales GRS80 y WGS84
Se definiraacute daacutetum como el conjunto de paraacutemetros que definen la posicioacuten de
un elipsoide respecto a la tierra Para determinarlo hace falta conocer la geometriacutea del elipsoide a y f su posicioacuten respecto al geocentro ∆X ∆Y ∆Z (coordenadas del centro del elipsoide respecto al geocentro) su orientacioacuten R1 R2 R3 (orientacioacuten de los ejes del elipsoide respecto a los terrestres) y la escala k
Si ∆X = ∆Y = ∆Z = 0 el daacutetum Geodeacutesico se llama Global o absoluto El Geodetic Reference System 1980 (GRS80) adoptado por la IUGG
(International Union of Geodesy and Geophysics) por su asamblea general de Camberra en 1979 pertenece a este grupo
Este sistema reemplaza al GRS67 por no representar adecuadamente el
tamantildeo forma y el campo gravitatorio con precisioacuten suficiente para la mayoriacutea de aplicaciones geodeacutesicas geofiacutesicas astronoacutemicas e hidrograacuteficas
Los principales paraacutemetros del sistema son
a = 6378137 m (Obtenido a partir de medidas SLR y Doppler) J2 = 10826310-8 (Obtenido a partir de perturbaciones en la oacuterbita de sateacutelites) GM = 3986005108 m3sg2 (Obtenido a partir de SLR LLR y pruebas espaciales) ω = 729311510-11 rdsg (Obtenido a partir de medidas astronoacutemicas) La orientacioacuten del eje Z seraacute la definida por el polo CIO como eje X el meridiano 0 definido por la BIH y el eje Y formando la tripleta dextroacutegira Este sistema sigue en vigor y no se ha actualizado en su definicioacuten ya que se debe tener en cuenta que por debajo del metro en la diferencia de paraacutemetros no existe una diferencia praacutectica en la determinacioacuten de coordenadas Asiacute las mejoras del mismo se consideran avances cientiacuteficos pero el estaacutendar (GRS80) no se debe cambiar
Cuando la informacioacuten sobre el datum se obtiene a partir de posiciones dentro de la oacuterbita de los sateacutelites (determinacioacuten dinaacutemica del sistema) los coeficientes del potencial gravitatorio (J2) asiacute como algunas constantes (ω velocidad de la luz constante gravitatoria geoceacutentrica) forman parte de la definicioacuten del datum ya que se calculan todas juntas
Un ejemplo de eacuteste uacuteltimo grupo es el World Geodetic System 1984 (WGS84)
utilizado por la teacutecnica GPS y obtenido exclusivamente a partir de los datos de la constelacioacuten de sateacutelites GPS
Los valores de sus principales paraacutemetros son
a = 6378137 m
J2 = 108262998310-8
GM = 3986004418108 m3sg2
13
ω = 729311510-11 rdsg
1f = 298257223563
El World Geodetic System 1984 (WGS84) utiliza como eje Z el polo IERS como eje X el meridiano 0 definido por el IERS y el eje Y formando la tripleta dextroacutegira Su origen coincide con el geocentro
A nivel praacutectico tal como se puede deducir el GRS80 y el WGS84 se pueden
considerar ideacutenticos 242- Sistemas de referencia geodeacutesicos locales ED50 Si ∆X ne ∆Y ne∆Z ne 0 nos encontramos ante un datum local El marco local queda definido por siete paraacutemetros (o mejor dicho 6 maacutes una condicioacuten) valores para a y f (geometriacutea del elipsoide) valores de las desviaciones de la vertical (ξ η) y de la ondulacioacuten del geoide (distancia entre el elipsoide de referencia y el geoide) con estos tres paraacutemetros se obtiene la orientacioacuten del elipsoide el acimut geodeacutesico de una liacutenea y como condicioacuten que el semieje menor del elipsoide y el eje medio de rotacioacuten terrestre sean paralelos Ademaacutes se intenta que el elipsoide se ajuste lo maacuteximo posible a la zona a cartografiar de manera que la reduccioacuten de observaciones sea lo maacutes sencilla posible Un ejemplo de este tipo de sistemas es el ED-50 (European Datum de 1950) sistema al que estaacute referida toda la cartografiacutea espantildeola Este sistema adoptoacute el elipsoide de Hayford o Internacional introducido por la IUGG en su asamblea general de 1924 en Madrid donde a y f fueron obtenidas a partir de mediciones astronoacutemicas y geodeacutesicas en los Estados Unidos a = 6378388 f = 1297 Como punto fundamental se adoptoacute Potsdam lugar donde la desviacioacuten de la vertical (diferencia angular entre la vertical geodeacutesica y astronoacutemica) y la ondulacioacuten del geoide son conocidas (ξ = 3rdquo36 η = 1rdquo78 N = 0) de manera que el elipsoide queda orientado respecto a la Tierra Cabe destacar que fijar los valores de la desviacioacuten de la vertical (ξ η) y el valor de la ondulacioacuten del geoide N en el punto fundamental para orientar el elipsoide es equivalente a fijarlo a partir de las coordenadas X Y Z de su centro respecto al geocentro figura 12 La exactitud de ED50 oscila entre unos pocos metros en el centro de Europa a maacutes de 10 en el sur aunque su precisioacuten relativa es mucho mayor y maacutes que suficiente para los levantamientos cartograacuteficos de pequentildeas y medianas escalas por lo que en 1968 el Servicio Geograacutefico del ejeacutercito lo adopta para su cartografiacutea baacutesica 150000 e igualmente el IGN en 1979
14
25- Marco de referencia terrestre internacional (ITRF) El sistema de referencia terrestre internacional convencional se materializa a traveacutes de las coordenadas de una serie de estaciones distribuidas por todo el mundo en ese sistema de referencia constituyendo el ITRF (Internacional Terrestrial Reference Frame) establecido y mantenido por la IERS Baacutesicamente el sistema que materializa se define como geoceacutentrico (incluyendo la atmoacutesfera y los oceacuteanos) la base para la escala la constituye el metro (en el sistema Internacional) y con orientacioacuten de sus ejes tal como establecioacute la BIH en 1984
bull Eje Z Polo medio determinado por la IERS y llamado IERS Reference Pole (IRP) o Convencional Terrestrial Pole (CTP)
bull Eje X Meridiano de Greenwich Convencional determinado por la IERS y
llamado IERS Reference Meridian (IRM) o Greenwich Mean Origin (GMO)
bull Eje Y Formando una tripleta dextroacutegira con los ejes anteriores sobre el
plano del ecuador convencional El marco estaacute formado por coordenadas cartesianas y velocidades de una serie
de estaciones equipadas con teacutecnicas de observacioacuten espacial (VLBI SLR LLR GPS desde 1991 y DORIS desde 1994) en la figura 13 se pueden ver las estaciones para el ITRF2000 Si se desean coordenadas geodeacutesicas se recomienda el uso del elipsoide GRS80 Estas coordenadas definen impliacutecitamente el origen la escala y la orientacioacuten de los ejes coordenados X Y Z del sistema de referencia
La historia de los diferentes ITRF comenzoacute en 1984 y a partir de ahiacute se han obtenido las soluciones 88 89 90 91 92 93 94 96 97 2000 2005 y recientemente la 2008 estas soluciones difieren unas de otras debido a la incorporacioacuten constante de nuevas estaciones nuevas observaciones en las estaciones ya existentes mejora en la precisioacuten de las mismas o nuevos meacutetodos de procesamiento
Figura 12 Sistema geodeacutesico local
Geoide
Elipsoide
X
Y
Z
X
Y
Zo
XoYo
a
b
o
PNbull
bull
(ξ η)
15
Cada una de las teacutecnicas (GPS VLBI LLR SLR o DORIS) genera su propio marco de referencia k con coordenadas y velocidades conocidas para cada estacioacuten i en cada eacutepoca ts de observacioacuten por lo tanto las soluciones de las teacutecnicas se deben
combinar para estimar las posiciones y velocidades en el marco ITRF ( iITRFX y
i
ITRFXbull
) en una eacutepoca de referencia t0 para cada estacioacuten i asiacute como los paraacutemetros de transformacioacuten (factor de escala Dk vector de traslaciones Tk en X Y Z y matriz de
rotaciones Rk sobre los ejes X YZ) y sus variaciones ( KDbull
KTbull
KRbull
) entre el marco ITRF (marco final combinacioacuten de todos los k) y el correspondiente k paraacutemetros que a su vez pueden estar referidos a un eacutepoca tK diferente de las anteriores La combinacioacuten general se ajusta a las ecuaciones
( ) ( )( )
01
i i i i i i i i iks ITRF s ITRF k k ITRF k ITRF s k k ITRF k ITRF
i i i is ITRF k k ITRF k ITRF
X X t t X T D X R X t t T D X R X
X X T D X R X
bull bull bull bull
bull bull bull bull bull
= + minus + + + + minus + +
= + + + La segunda ecuacioacuten se obtiene a partir de derivar la primera y considerar que las derivadas segundas son nulas (aceleracioacuten nula) y que la derivada de i
ITRFX (sobre 10 centiacutemetros por antildeo como media) multiplicada por DK o RK (que son del orden de 10-5) tambieacuten se pueden despreciar Este sistema de ecuaciones es vaacutelido para
bull Observaciones bajo la forma de serie temporal de coordenadas (por ejemplo soluciones semanales para cada estacioacuten y por tanto en su correspondiente eacutepoca ts para una determinada teacutecnica espacial) por lo que la segunda ecuacioacuten (velocidad) del sistema (1) no se utiliza y donde la solucioacuten no es maacutes que la acumulacioacuten de eacutepocas de observacioacuten
bull Observaciones bajo la forma de paraacutemetros globales (coordenadas y
velocidades) vaacutelidos para un intervalo de tiempo elevado (varios antildeos) y
Figura 13 Estaciones que forman el ITRF2000 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
16
centrado en una eacutepoca tk (que puede coincidir o no con la t0 para cada una de las teacutecnicas espaciales)
La conexioacuten entre las diferentes teacutecnicas de observacioacuten se realiza en aquellas estaciones (collocation sites) que posean dos o maacutes teacutecnicas de observacioacuten y sea posible la determinacioacuten precisa (plusmn4-5 mm de error) de los incrementos de coordenadas X Y Z (local ties) entre los instrumentos de medida (receptores GPS o DORIS telescopios y radiotelescopios) utilizando mediciones topograacuteficas o con GPS En cada una de estas estaciones se genera una solucioacuten maacutes de acuerdo con las ecuaciones (1) teniendo en cuenta los incrementos de coordenadas es decir si una estacioacuten posee instrumental VLBI y SLR y se han medido las diferencias entre los dos instrumentos de forma precisa (incrementos de X Y Z) se genera una ecuacioacuten del tipo (1) para la solucioacuten VLBI otra para la SLR y otra con los incrementos observados (por ejemplo la solucioacuten VLBI maacutes los incrementos de manera que se estaacuten dando coordenadas en el marco VLBI a la estacioacuten SLR) El establecimiento de un marco de referencia de precisioacuten no es tarea sencilla ya que la Tierra sufre deformaciones debido a su caraacutecter elaacutestico y las precisiones de las observaciones son cada vez mayores por lo que las observaciones deben ser corregidas por los efectos de
bull Mareas terrestres bull Carga atmosfeacuterica y oceaacutenica
bull Tectoacutenica de placas El modelo utilizado hasta el ITRF2005 (incluido) es el
NNR-NUVEL-1A basado en que no existen rotaciones sobre el manto de las placas tectoacutenicas y por tanto la suma de las velocidades de las placas sobre toda la Tierra es cero Para el ITRF2008 se utiliza un modelo basado en las propias velocidades de las estaciones ITRF observadas con teacutecnicas espaciales el APKIM2005 (las velocidades presentan tambieacuten error ya que se obtienen a partir de caacutelculos)
bull Movimientos locales y regionales Un ejemplo seriacutea el rebote postglacial de
Escandinavia
Por tanto y tal como se pude ver en la tabla 3 el ITRF es un marco dinaacutemico que cambia de acuerdo a las variaciones temporales de las coordenadas y velocidades debido a los efectos anteriores
251- ITRF2000 ITRF2005 e ITRF2008
El marco ITRF2000 estaacute basado en 800 determinaciones en cerca de 500 sitios figura 13 estaacute referido a la eacutepoca 19970 (t0=19970) quedando determinado a partir de soluciones globales para cada marco k en una eacutepoca de referencia tk Para resolver el sistema de ecuaciones (1) es necesario fijar el datum de alguna manera el datum de la solucioacuten ITRF2000 quedoacute definido de la siguiente manera
bull Escala Media ponderada de determinadas medidas VLBI y SLR de alta
precisioacuten Esto se materializa fijando a cero el valor de escala y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 y las estaciones seleccionadas
bull Oriacutegen Media ponderada de determinaciones SLR (el centro de la oacuterbita de los
sateacutelites corresponderaacute al geocentro terrestre) Esto se materializa fijando a cero el valor del vector de traslacioacuten y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 las estaciones seleccionadas
17
bull Orientacioacuten Seleccioacuten de determinadas estaciones ITRF (sus coordenadas y velocidades) de alta calidad geodeacutesica que cumpla con los siguientes criterios
1 Que posea observaciones continuas al menos de los 3 uacuteltimos antildeos 2 Localizado en plataforma riacutegida y lejos de zonas de deformacioacuten 3 Que se haya determinado la velocidad con una precisioacuten mejor a
3mmantildeo 4 Que la velocidad sea menor a 3mmantildeo
Basado en estos criterios las 54 estaciones seleccionadas se pueden ver en la figura 14 como puntos azules En el sistema de ecuaciones (1) se introduce una ecuacioacuten de condicioacuten de forma que para estos puntos seleccionados exista correspondencia entre la orientacioacuten del marco de referencia y la del marco de referencia anterior (ITRF19970 por lo que no seraacuten maacutes que las definidas en la orientacioacuten BIH para 19840) La variacioacuten en la orientacioacuten (variacioacuten de estas coordenadas) seraacute la del modelo NNR-NUVEL-1A
El marco ITRF2005 referido a la eacutepoca 20000 (t0=20000) se ha basado
uacutenicamente en determinaciones SLR VLBI DORIS y GPS en 608 estaciones situadas en 338 localizaciones diferentes figura 15 quedando definido a partir de series temporales continuas de observaciones (soluciones semanales para GPS entre 1996 y 2005 DORIS entre 1993 y 2005 y SLR entre 1993 y 2005 y sesiones diarias para VLBI entre 1981 y 2005) de esta manera se puede realizar un anaacutelisis maacutes riguroso de las observaciones y detectar aquellas que presenten error o discontinuidades en las series Cada eacutepoca genera sistema de ecuaciones (1) para cada teacutecnica y en caso de que una estacioacuten presente una discontinuidad en la serie una nueva posicioacuten y velocidad se deben calcular para esa estacioacuten por lo que las coordenadas y velocidades calculadas lo seraacuten para un cierto intervalo de tiempo El datum se define de la siguiente manera
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20000) y variacioacuten nula
de estos paraacutemetros entre ITRF2005 y las series SLR bull Escala Factor de escala nulo (para la eacutepoca 20000) y variacioacuten nula entre
ITRF2005 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20000) y variaciones nulas entre ITRF2005 y ITRF2000 (en las estaciones ITRF seleccionadas)
Figura 14 En azul se muestran los 54 puntos de la ITRF que cumplen con los 4 criterios y en rojo los que cumplen con los criterios 1 3 y 4
18
En la tabla 1 se pueden ver los paraacutemetros de transformacioacuten entre el marco ITRF2005 y el ITRF2000 usando 70 estaciones especiacuteficas para su caacutelculo (las mismas que las utilizadas para orientar el ITRF2005 al ITRF2000 por lo que no existen paraacutemetros de rotacioacuten en esta transformacioacuten) Los resultados muestran las traslaciones del geocentro en miliacutemetros y el factor de escala en partes por billoacuten (con la notacioacuten americana es decir 10-9) asiacute como sus variaciones temporales (miliacutemetrosantildeo y ppbantildeo) Los resultados de la transformacioacuten muestran una variacioacuten temporal de 18 miliacutemetros por antildeo entre ITRF2005 e ITRF2000 esta velocidad de movimiento del geocentro no genera la estabilidad deseada del marco de referencia por lo que este marco se debe cambiar raacutepidamente Se cree que este movimiento se debe a la reduccioacuten de estaciones SLR con el tiempo asiacute como a su mala distribucioacuten geograacutefica (muchas maacutes en el hemisferio Norte que en el Sur) asiacute como la utilizacioacuten de diferentes modelos de procesamiento SLR para la solucioacuten ITRF2005 y la ITRF2000
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) 01 -08 -58 040 -02 01 -18 008
En base a esta uacuteltima conclusioacuten el marco ITRF2008 referido a la eacutepoca 20050 (t0=20050) se basa en el reprocesamiento de todas las series de observaciones de las cuatro teacutecnicas espaciales utilizadas (VLBI entre 1980 y 2009 GPSGNSS entre 1997 y 2009 SLR entre 1983 y 2009 DORIS entre 1993 y 2009) de manera que utilicen estaacutendares actuales e ideacutenticos y el mismo software para la reduccioacuten modelizacioacuten y correccioacuten de observaciones (modelos de troposfera e ionosfera centros de fase de emisioacuten de los sateacutelites y receptores etc) De esta manera el marco ITRF conservaraacute su definicioacuten a lo largo del tiempo en cuanto a origen escala y orientacioacuten (se produciraacuten series temporales de observaciones homogeacuteneas) por lo que los estudios de deformacioacuten dinaacutemica terrestre saldraacuten beneficiados (por ejemplo es esencial para el estudio del nivel medio del mar y su variacioacuten global y regional que el marco de referencia se defina siempre igual) 608 estaciones situadas en 338 localizaciones diferentes constituyen el marco El datum ITRF2008 se define de la siguiente manera
Figura 15 Estaciones que forman el ITRF2005 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
Tabla 1 Paraacutemetros de transformacioacuten entre los marcos ITRF2005 e ITRF2000 los paraacutemetros de rotacioacuten y sus variaciones son cero
19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

8
23- Movimiento del polo Coordenadas instantaacuteneas y absolutas
La direccioacuten del eje de rotacioacuten terrestre cambia con el tiempo respecto a la propia superficie terrestre y por tanto respecto al sistema de referencia geoceacutentrico terrestre
El polo describe a lo largo del tiempo una trayectoria libre que es una curva
maacutes o menos circular de radio 6 metros figura 7 y periodo aproximado de 430 diacuteas provocado por el caraacutecter deformable de la Tierra redistribuciones interiores de las masas terrestres efectos del rebote postglaciar en Canadaacute y Fenoscandia movimientos tectoacutenicos redistribuciones atmosfeacutericas etc figura 8
Superpuesta a eacutesta trayectoria libre se encuentran una serie de oscilaciones
forzadas provocadas por la influencia gravitatoria del Sol y la Luna con una magnitud de 60 centiacutemetros figura 7
Eje Instantaneo de Rotacioacuten
Meridiano Instantaneode Greenwich
Eje Z
Eje X
Eje YCentro de Masas
Liacutenea Vertical (Plomada)
Tangente a la vertical por el punto P
Vector de gravedad
Superficie equipotencial de P (WP)
P
Λ Φ
Eje Instantaneo de Rotacioacuten
Meridiano Instantaneode Greenwich
Eje Z
Eje X
Eje YCentro de Masas
Liacutenea Vertical (Plomada)
Tangente a la vertical por el punto P
Vector de gravedad
Superficie equipotencial de P (WP)
P
Λ Φ
Figura 6 Coordenadas Astronoacutemicas
9
Este movimiento del polo afecta directamente a las coordenadas de los puntos sobre la superficie terrestre ya que el sistema de referencia iraacute cambiando Lo maacutes indicado es tomar como eje Z de referencia el origen o centro de los ciacuterculos de movimiento libre quedando asiacute determinado el eje Z de un modo convencional Si las coordenadas de los puntos se refieren al polo convencional tendremos coordenadas absolutas si se refieren al polo instantaacuteneo (situacioacuten del eje de rotacioacuten en un determinado momento) tendremos coordenadas instantaacuteneas
No hay teoriacutea cientiacutefica que pueda predecir el movimiento del polo y por lo
tanto su posicioacuten asiacute que se monitoriza continuamente mediante observaciones Esta materializacioacuten se realizaba con observaciones astronoacutemicas lo que dio lugar al establecimiento de tres polos diferentes
bull Polo CIO desde 1899 la International Latitude Service (ILS) utilizando
observaciones astronoacutemicas sobre cinco estaciones en un mismo paralelo (φ = 39ordm 08rsquo) llegoacute a la definicioacuten del polo CIO (Convencional International Origen) definido como la posicioacuten media del polo entre 1900 y 1905 de manera que se obtuvieron determinaciones precisas de
6 m
60 cm
O
6 m
60 cm
O
Figura 7 Movimiento libre y oscilaciones forzadas que cuya suma describe el movimiento del polo
Figura 8 Causas del movimiento del polo
10
los largos periacuteodos del movimiento del polo (su situacioacuten antildeo a antildeo figura 9) La precisioacuten de estas determinaciones se cifroacute en 3 metros
bull Polo BIH (Bureau International de lrsquoHeure) Por otro lado el eje X del
sistema de referencia geoceacutentrico terrestre convencional se determinoacute a partir de las longitudes de 50 estaciones por la BIH creada en 1912 para mantener la escala de tiempo uniforme es decir era el organismo encargado del mantenimiento de la hora y de la posicioacuten del origen de longitudes (posicioacuten media del observatorio astronoacutemico de greenwich) a traveacutes de determinacioacuten de la longitud astronoacutemica de los observatorios pertenecientes a este organismo La determinacioacuten de la latitud de estos observatorios generoacute el polo BIH que proporcionaba estimaciones maacutes frecuentes (medias de 5 diacuteas) y precisiones de 1 metro en la determinacioacuten del movimiento del polo
bull Polo IPMS Cada vez con maacutes frecuencia se empezoacute a necesitar los
movimientos de corto periodo del polo para aplicaciones geodeacutesicas y astronoacutemicas figura 9 por lo que el ILS se reorganizoacute en 1962 en el Internacional Polar Motion Service (IPMS) asiacute surge el polo IPMS generado a partir de determinaciones de latitud astronoacutemica en 80 estaciones y con precisioacuten de un metro en la determinacioacuten del movimiento del polo
En 1967 el polo CIO es aceptado como estaacutendar por la International
Astronomical Union para dar asiacute continuidad a las observaciones maacutes antiguas eferidas al polo CIO por lo que los polos BIH e IPMS se intentan referenciar al polo CIO esto no es posible debido a las precisiones de los diferentes polos ya que se trata de la determinacioacuten de un ciacuterculo aproximadamente de 6 metros de diaacutemetro que queda definido con 3 metros de error en el polo CIO y con un metro en los otros dos es decir en realidad con estas precisiones se estaacute hablando del mismo polo
La situacioacuten se complica a partir de ese antildeo debido a la irrupcioacuten de la
geodesia por sateacutelite Se empiezan a utilizar medidas a sateacutelite para la determinacioacuten del movimiento del polo en concreto medidas Doppler a los sateacutelites de la constelacioacuten TRANSIT alcanzando precisiones de 02 metros
En los antildeos siguientes nuevas teacutecnicas espaciales demuestran la precisioacuten de
las mismas en la determinacioacuten del movimiento del polo medidas laacuteser a sateacutelites o a la Luna VLBI GPS DORIS PRARE Todas estas teacutecnicas se basan en la medicioacuten continua de coordenadas por lo que la monitorizacioacuten del polo es permanente y su precisioacuten se reduce hasta los 6-8 centiacutemetros
Figura 9 Movimientos de largo y corto periodo del polo
11
Asiacute en 1984 la BIH establecioacute un nuevo sistema de referencia terrestre basado
en las coordenadas cartesianas geoceacutentricas de las estaciones fundamentales donde teacutecnicas espaciales habiacutean sido aplicadas este nuevo sistema coincide con el polo CIO astronoacutemico si se tienen en cuanta las precisiones en la determinacioacuten del CIO lo cual permite dar continuidad a las coordenadas determinadas antiguamente
Finalmente en 1987 se creoacute la Internacional Earth Rotacion Service (IERS)
reemplazando a la BIH y a la IPMS para entre otras cosas monitorizar el movimiento del polo basaacutendose en teacutecnicas espaciales de forma continua (obtencioacuten del polo instantaacuteneo figura 10) con lo que el polo BIH determinado en 1984 pasoacute a llamarse polo IERS Desde abril de 2003 el nombre fue cambiado al de Internacional Earth Rotation and Reference Systems Service (IERS) proporcionando las coordenadas instantaacuteneas del polo para cada diacutea referidas al polo IERS cuyo eje X seraacute el meridiano de Greenwich convencional y el eje Y estaacute situado hacia el Oeste (direccioacuten de su sentido positivo) formando 90 grados las unidades de estas coordenadas son segundos de arco figura 11
En las paacuteginas httpwwwiersorg y httphpiersobspmfr se puede
encontrar mucha maacutes informacioacuten Como se ha dicho las mediciones se realizan en un momento determinado (t)
conociendo a traveacutes de los valores proporcionados por la IERS los valores para el movimiento del polo se podraacuten transformar los valores de latitud y longitud instantaacuteneos a valores de latitud y longitud absolutos sobre el sistema de referencia
Figura 10 Polo instantaacuteneo en lila y polo medio en amarillo
Figura 11 Sistema de referencia y coordenadas en las que se expresa el movimiento del polo
12
geoceacutentrico terrestre convencional Los valores de esta correccioacuten rondan los 01 segundos
24- Sistemas de referencia geodeacutesicos
241- Sistemas de referencia geodeacutesicos globales GRS80 y WGS84
Se definiraacute daacutetum como el conjunto de paraacutemetros que definen la posicioacuten de
un elipsoide respecto a la tierra Para determinarlo hace falta conocer la geometriacutea del elipsoide a y f su posicioacuten respecto al geocentro ∆X ∆Y ∆Z (coordenadas del centro del elipsoide respecto al geocentro) su orientacioacuten R1 R2 R3 (orientacioacuten de los ejes del elipsoide respecto a los terrestres) y la escala k
Si ∆X = ∆Y = ∆Z = 0 el daacutetum Geodeacutesico se llama Global o absoluto El Geodetic Reference System 1980 (GRS80) adoptado por la IUGG
(International Union of Geodesy and Geophysics) por su asamblea general de Camberra en 1979 pertenece a este grupo
Este sistema reemplaza al GRS67 por no representar adecuadamente el
tamantildeo forma y el campo gravitatorio con precisioacuten suficiente para la mayoriacutea de aplicaciones geodeacutesicas geofiacutesicas astronoacutemicas e hidrograacuteficas
Los principales paraacutemetros del sistema son
a = 6378137 m (Obtenido a partir de medidas SLR y Doppler) J2 = 10826310-8 (Obtenido a partir de perturbaciones en la oacuterbita de sateacutelites) GM = 3986005108 m3sg2 (Obtenido a partir de SLR LLR y pruebas espaciales) ω = 729311510-11 rdsg (Obtenido a partir de medidas astronoacutemicas) La orientacioacuten del eje Z seraacute la definida por el polo CIO como eje X el meridiano 0 definido por la BIH y el eje Y formando la tripleta dextroacutegira Este sistema sigue en vigor y no se ha actualizado en su definicioacuten ya que se debe tener en cuenta que por debajo del metro en la diferencia de paraacutemetros no existe una diferencia praacutectica en la determinacioacuten de coordenadas Asiacute las mejoras del mismo se consideran avances cientiacuteficos pero el estaacutendar (GRS80) no se debe cambiar
Cuando la informacioacuten sobre el datum se obtiene a partir de posiciones dentro de la oacuterbita de los sateacutelites (determinacioacuten dinaacutemica del sistema) los coeficientes del potencial gravitatorio (J2) asiacute como algunas constantes (ω velocidad de la luz constante gravitatoria geoceacutentrica) forman parte de la definicioacuten del datum ya que se calculan todas juntas
Un ejemplo de eacuteste uacuteltimo grupo es el World Geodetic System 1984 (WGS84)
utilizado por la teacutecnica GPS y obtenido exclusivamente a partir de los datos de la constelacioacuten de sateacutelites GPS
Los valores de sus principales paraacutemetros son
a = 6378137 m
J2 = 108262998310-8
GM = 3986004418108 m3sg2
13
ω = 729311510-11 rdsg
1f = 298257223563
El World Geodetic System 1984 (WGS84) utiliza como eje Z el polo IERS como eje X el meridiano 0 definido por el IERS y el eje Y formando la tripleta dextroacutegira Su origen coincide con el geocentro
A nivel praacutectico tal como se puede deducir el GRS80 y el WGS84 se pueden
considerar ideacutenticos 242- Sistemas de referencia geodeacutesicos locales ED50 Si ∆X ne ∆Y ne∆Z ne 0 nos encontramos ante un datum local El marco local queda definido por siete paraacutemetros (o mejor dicho 6 maacutes una condicioacuten) valores para a y f (geometriacutea del elipsoide) valores de las desviaciones de la vertical (ξ η) y de la ondulacioacuten del geoide (distancia entre el elipsoide de referencia y el geoide) con estos tres paraacutemetros se obtiene la orientacioacuten del elipsoide el acimut geodeacutesico de una liacutenea y como condicioacuten que el semieje menor del elipsoide y el eje medio de rotacioacuten terrestre sean paralelos Ademaacutes se intenta que el elipsoide se ajuste lo maacuteximo posible a la zona a cartografiar de manera que la reduccioacuten de observaciones sea lo maacutes sencilla posible Un ejemplo de este tipo de sistemas es el ED-50 (European Datum de 1950) sistema al que estaacute referida toda la cartografiacutea espantildeola Este sistema adoptoacute el elipsoide de Hayford o Internacional introducido por la IUGG en su asamblea general de 1924 en Madrid donde a y f fueron obtenidas a partir de mediciones astronoacutemicas y geodeacutesicas en los Estados Unidos a = 6378388 f = 1297 Como punto fundamental se adoptoacute Potsdam lugar donde la desviacioacuten de la vertical (diferencia angular entre la vertical geodeacutesica y astronoacutemica) y la ondulacioacuten del geoide son conocidas (ξ = 3rdquo36 η = 1rdquo78 N = 0) de manera que el elipsoide queda orientado respecto a la Tierra Cabe destacar que fijar los valores de la desviacioacuten de la vertical (ξ η) y el valor de la ondulacioacuten del geoide N en el punto fundamental para orientar el elipsoide es equivalente a fijarlo a partir de las coordenadas X Y Z de su centro respecto al geocentro figura 12 La exactitud de ED50 oscila entre unos pocos metros en el centro de Europa a maacutes de 10 en el sur aunque su precisioacuten relativa es mucho mayor y maacutes que suficiente para los levantamientos cartograacuteficos de pequentildeas y medianas escalas por lo que en 1968 el Servicio Geograacutefico del ejeacutercito lo adopta para su cartografiacutea baacutesica 150000 e igualmente el IGN en 1979
14
25- Marco de referencia terrestre internacional (ITRF) El sistema de referencia terrestre internacional convencional se materializa a traveacutes de las coordenadas de una serie de estaciones distribuidas por todo el mundo en ese sistema de referencia constituyendo el ITRF (Internacional Terrestrial Reference Frame) establecido y mantenido por la IERS Baacutesicamente el sistema que materializa se define como geoceacutentrico (incluyendo la atmoacutesfera y los oceacuteanos) la base para la escala la constituye el metro (en el sistema Internacional) y con orientacioacuten de sus ejes tal como establecioacute la BIH en 1984
bull Eje Z Polo medio determinado por la IERS y llamado IERS Reference Pole (IRP) o Convencional Terrestrial Pole (CTP)
bull Eje X Meridiano de Greenwich Convencional determinado por la IERS y
llamado IERS Reference Meridian (IRM) o Greenwich Mean Origin (GMO)
bull Eje Y Formando una tripleta dextroacutegira con los ejes anteriores sobre el
plano del ecuador convencional El marco estaacute formado por coordenadas cartesianas y velocidades de una serie
de estaciones equipadas con teacutecnicas de observacioacuten espacial (VLBI SLR LLR GPS desde 1991 y DORIS desde 1994) en la figura 13 se pueden ver las estaciones para el ITRF2000 Si se desean coordenadas geodeacutesicas se recomienda el uso del elipsoide GRS80 Estas coordenadas definen impliacutecitamente el origen la escala y la orientacioacuten de los ejes coordenados X Y Z del sistema de referencia
La historia de los diferentes ITRF comenzoacute en 1984 y a partir de ahiacute se han obtenido las soluciones 88 89 90 91 92 93 94 96 97 2000 2005 y recientemente la 2008 estas soluciones difieren unas de otras debido a la incorporacioacuten constante de nuevas estaciones nuevas observaciones en las estaciones ya existentes mejora en la precisioacuten de las mismas o nuevos meacutetodos de procesamiento
Figura 12 Sistema geodeacutesico local
Geoide
Elipsoide
X
Y
Z
X
Y
Zo
XoYo
a
b
o
PNbull
bull
(ξ η)
15
Cada una de las teacutecnicas (GPS VLBI LLR SLR o DORIS) genera su propio marco de referencia k con coordenadas y velocidades conocidas para cada estacioacuten i en cada eacutepoca ts de observacioacuten por lo tanto las soluciones de las teacutecnicas se deben
combinar para estimar las posiciones y velocidades en el marco ITRF ( iITRFX y
i
ITRFXbull
) en una eacutepoca de referencia t0 para cada estacioacuten i asiacute como los paraacutemetros de transformacioacuten (factor de escala Dk vector de traslaciones Tk en X Y Z y matriz de
rotaciones Rk sobre los ejes X YZ) y sus variaciones ( KDbull
KTbull
KRbull
) entre el marco ITRF (marco final combinacioacuten de todos los k) y el correspondiente k paraacutemetros que a su vez pueden estar referidos a un eacutepoca tK diferente de las anteriores La combinacioacuten general se ajusta a las ecuaciones
( ) ( )( )
01
i i i i i i i i iks ITRF s ITRF k k ITRF k ITRF s k k ITRF k ITRF
i i i is ITRF k k ITRF k ITRF
X X t t X T D X R X t t T D X R X
X X T D X R X
bull bull bull bull
bull bull bull bull bull
= + minus + + + + minus + +
= + + + La segunda ecuacioacuten se obtiene a partir de derivar la primera y considerar que las derivadas segundas son nulas (aceleracioacuten nula) y que la derivada de i
ITRFX (sobre 10 centiacutemetros por antildeo como media) multiplicada por DK o RK (que son del orden de 10-5) tambieacuten se pueden despreciar Este sistema de ecuaciones es vaacutelido para
bull Observaciones bajo la forma de serie temporal de coordenadas (por ejemplo soluciones semanales para cada estacioacuten y por tanto en su correspondiente eacutepoca ts para una determinada teacutecnica espacial) por lo que la segunda ecuacioacuten (velocidad) del sistema (1) no se utiliza y donde la solucioacuten no es maacutes que la acumulacioacuten de eacutepocas de observacioacuten
bull Observaciones bajo la forma de paraacutemetros globales (coordenadas y
velocidades) vaacutelidos para un intervalo de tiempo elevado (varios antildeos) y
Figura 13 Estaciones que forman el ITRF2000 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
16
centrado en una eacutepoca tk (que puede coincidir o no con la t0 para cada una de las teacutecnicas espaciales)
La conexioacuten entre las diferentes teacutecnicas de observacioacuten se realiza en aquellas estaciones (collocation sites) que posean dos o maacutes teacutecnicas de observacioacuten y sea posible la determinacioacuten precisa (plusmn4-5 mm de error) de los incrementos de coordenadas X Y Z (local ties) entre los instrumentos de medida (receptores GPS o DORIS telescopios y radiotelescopios) utilizando mediciones topograacuteficas o con GPS En cada una de estas estaciones se genera una solucioacuten maacutes de acuerdo con las ecuaciones (1) teniendo en cuenta los incrementos de coordenadas es decir si una estacioacuten posee instrumental VLBI y SLR y se han medido las diferencias entre los dos instrumentos de forma precisa (incrementos de X Y Z) se genera una ecuacioacuten del tipo (1) para la solucioacuten VLBI otra para la SLR y otra con los incrementos observados (por ejemplo la solucioacuten VLBI maacutes los incrementos de manera que se estaacuten dando coordenadas en el marco VLBI a la estacioacuten SLR) El establecimiento de un marco de referencia de precisioacuten no es tarea sencilla ya que la Tierra sufre deformaciones debido a su caraacutecter elaacutestico y las precisiones de las observaciones son cada vez mayores por lo que las observaciones deben ser corregidas por los efectos de
bull Mareas terrestres bull Carga atmosfeacuterica y oceaacutenica
bull Tectoacutenica de placas El modelo utilizado hasta el ITRF2005 (incluido) es el
NNR-NUVEL-1A basado en que no existen rotaciones sobre el manto de las placas tectoacutenicas y por tanto la suma de las velocidades de las placas sobre toda la Tierra es cero Para el ITRF2008 se utiliza un modelo basado en las propias velocidades de las estaciones ITRF observadas con teacutecnicas espaciales el APKIM2005 (las velocidades presentan tambieacuten error ya que se obtienen a partir de caacutelculos)
bull Movimientos locales y regionales Un ejemplo seriacutea el rebote postglacial de
Escandinavia
Por tanto y tal como se pude ver en la tabla 3 el ITRF es un marco dinaacutemico que cambia de acuerdo a las variaciones temporales de las coordenadas y velocidades debido a los efectos anteriores
251- ITRF2000 ITRF2005 e ITRF2008
El marco ITRF2000 estaacute basado en 800 determinaciones en cerca de 500 sitios figura 13 estaacute referido a la eacutepoca 19970 (t0=19970) quedando determinado a partir de soluciones globales para cada marco k en una eacutepoca de referencia tk Para resolver el sistema de ecuaciones (1) es necesario fijar el datum de alguna manera el datum de la solucioacuten ITRF2000 quedoacute definido de la siguiente manera
bull Escala Media ponderada de determinadas medidas VLBI y SLR de alta
precisioacuten Esto se materializa fijando a cero el valor de escala y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 y las estaciones seleccionadas
bull Oriacutegen Media ponderada de determinaciones SLR (el centro de la oacuterbita de los
sateacutelites corresponderaacute al geocentro terrestre) Esto se materializa fijando a cero el valor del vector de traslacioacuten y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 las estaciones seleccionadas
17
bull Orientacioacuten Seleccioacuten de determinadas estaciones ITRF (sus coordenadas y velocidades) de alta calidad geodeacutesica que cumpla con los siguientes criterios
1 Que posea observaciones continuas al menos de los 3 uacuteltimos antildeos 2 Localizado en plataforma riacutegida y lejos de zonas de deformacioacuten 3 Que se haya determinado la velocidad con una precisioacuten mejor a
3mmantildeo 4 Que la velocidad sea menor a 3mmantildeo
Basado en estos criterios las 54 estaciones seleccionadas se pueden ver en la figura 14 como puntos azules En el sistema de ecuaciones (1) se introduce una ecuacioacuten de condicioacuten de forma que para estos puntos seleccionados exista correspondencia entre la orientacioacuten del marco de referencia y la del marco de referencia anterior (ITRF19970 por lo que no seraacuten maacutes que las definidas en la orientacioacuten BIH para 19840) La variacioacuten en la orientacioacuten (variacioacuten de estas coordenadas) seraacute la del modelo NNR-NUVEL-1A
El marco ITRF2005 referido a la eacutepoca 20000 (t0=20000) se ha basado
uacutenicamente en determinaciones SLR VLBI DORIS y GPS en 608 estaciones situadas en 338 localizaciones diferentes figura 15 quedando definido a partir de series temporales continuas de observaciones (soluciones semanales para GPS entre 1996 y 2005 DORIS entre 1993 y 2005 y SLR entre 1993 y 2005 y sesiones diarias para VLBI entre 1981 y 2005) de esta manera se puede realizar un anaacutelisis maacutes riguroso de las observaciones y detectar aquellas que presenten error o discontinuidades en las series Cada eacutepoca genera sistema de ecuaciones (1) para cada teacutecnica y en caso de que una estacioacuten presente una discontinuidad en la serie una nueva posicioacuten y velocidad se deben calcular para esa estacioacuten por lo que las coordenadas y velocidades calculadas lo seraacuten para un cierto intervalo de tiempo El datum se define de la siguiente manera
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20000) y variacioacuten nula
de estos paraacutemetros entre ITRF2005 y las series SLR bull Escala Factor de escala nulo (para la eacutepoca 20000) y variacioacuten nula entre
ITRF2005 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20000) y variaciones nulas entre ITRF2005 y ITRF2000 (en las estaciones ITRF seleccionadas)
Figura 14 En azul se muestran los 54 puntos de la ITRF que cumplen con los 4 criterios y en rojo los que cumplen con los criterios 1 3 y 4
18
En la tabla 1 se pueden ver los paraacutemetros de transformacioacuten entre el marco ITRF2005 y el ITRF2000 usando 70 estaciones especiacuteficas para su caacutelculo (las mismas que las utilizadas para orientar el ITRF2005 al ITRF2000 por lo que no existen paraacutemetros de rotacioacuten en esta transformacioacuten) Los resultados muestran las traslaciones del geocentro en miliacutemetros y el factor de escala en partes por billoacuten (con la notacioacuten americana es decir 10-9) asiacute como sus variaciones temporales (miliacutemetrosantildeo y ppbantildeo) Los resultados de la transformacioacuten muestran una variacioacuten temporal de 18 miliacutemetros por antildeo entre ITRF2005 e ITRF2000 esta velocidad de movimiento del geocentro no genera la estabilidad deseada del marco de referencia por lo que este marco se debe cambiar raacutepidamente Se cree que este movimiento se debe a la reduccioacuten de estaciones SLR con el tiempo asiacute como a su mala distribucioacuten geograacutefica (muchas maacutes en el hemisferio Norte que en el Sur) asiacute como la utilizacioacuten de diferentes modelos de procesamiento SLR para la solucioacuten ITRF2005 y la ITRF2000
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) 01 -08 -58 040 -02 01 -18 008
En base a esta uacuteltima conclusioacuten el marco ITRF2008 referido a la eacutepoca 20050 (t0=20050) se basa en el reprocesamiento de todas las series de observaciones de las cuatro teacutecnicas espaciales utilizadas (VLBI entre 1980 y 2009 GPSGNSS entre 1997 y 2009 SLR entre 1983 y 2009 DORIS entre 1993 y 2009) de manera que utilicen estaacutendares actuales e ideacutenticos y el mismo software para la reduccioacuten modelizacioacuten y correccioacuten de observaciones (modelos de troposfera e ionosfera centros de fase de emisioacuten de los sateacutelites y receptores etc) De esta manera el marco ITRF conservaraacute su definicioacuten a lo largo del tiempo en cuanto a origen escala y orientacioacuten (se produciraacuten series temporales de observaciones homogeacuteneas) por lo que los estudios de deformacioacuten dinaacutemica terrestre saldraacuten beneficiados (por ejemplo es esencial para el estudio del nivel medio del mar y su variacioacuten global y regional que el marco de referencia se defina siempre igual) 608 estaciones situadas en 338 localizaciones diferentes constituyen el marco El datum ITRF2008 se define de la siguiente manera
Figura 15 Estaciones que forman el ITRF2005 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
Tabla 1 Paraacutemetros de transformacioacuten entre los marcos ITRF2005 e ITRF2000 los paraacutemetros de rotacioacuten y sus variaciones son cero
19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

9
Este movimiento del polo afecta directamente a las coordenadas de los puntos sobre la superficie terrestre ya que el sistema de referencia iraacute cambiando Lo maacutes indicado es tomar como eje Z de referencia el origen o centro de los ciacuterculos de movimiento libre quedando asiacute determinado el eje Z de un modo convencional Si las coordenadas de los puntos se refieren al polo convencional tendremos coordenadas absolutas si se refieren al polo instantaacuteneo (situacioacuten del eje de rotacioacuten en un determinado momento) tendremos coordenadas instantaacuteneas
No hay teoriacutea cientiacutefica que pueda predecir el movimiento del polo y por lo
tanto su posicioacuten asiacute que se monitoriza continuamente mediante observaciones Esta materializacioacuten se realizaba con observaciones astronoacutemicas lo que dio lugar al establecimiento de tres polos diferentes
bull Polo CIO desde 1899 la International Latitude Service (ILS) utilizando
observaciones astronoacutemicas sobre cinco estaciones en un mismo paralelo (φ = 39ordm 08rsquo) llegoacute a la definicioacuten del polo CIO (Convencional International Origen) definido como la posicioacuten media del polo entre 1900 y 1905 de manera que se obtuvieron determinaciones precisas de
6 m
60 cm
O
6 m
60 cm
O
Figura 7 Movimiento libre y oscilaciones forzadas que cuya suma describe el movimiento del polo
Figura 8 Causas del movimiento del polo
10
los largos periacuteodos del movimiento del polo (su situacioacuten antildeo a antildeo figura 9) La precisioacuten de estas determinaciones se cifroacute en 3 metros
bull Polo BIH (Bureau International de lrsquoHeure) Por otro lado el eje X del
sistema de referencia geoceacutentrico terrestre convencional se determinoacute a partir de las longitudes de 50 estaciones por la BIH creada en 1912 para mantener la escala de tiempo uniforme es decir era el organismo encargado del mantenimiento de la hora y de la posicioacuten del origen de longitudes (posicioacuten media del observatorio astronoacutemico de greenwich) a traveacutes de determinacioacuten de la longitud astronoacutemica de los observatorios pertenecientes a este organismo La determinacioacuten de la latitud de estos observatorios generoacute el polo BIH que proporcionaba estimaciones maacutes frecuentes (medias de 5 diacuteas) y precisiones de 1 metro en la determinacioacuten del movimiento del polo
bull Polo IPMS Cada vez con maacutes frecuencia se empezoacute a necesitar los
movimientos de corto periodo del polo para aplicaciones geodeacutesicas y astronoacutemicas figura 9 por lo que el ILS se reorganizoacute en 1962 en el Internacional Polar Motion Service (IPMS) asiacute surge el polo IPMS generado a partir de determinaciones de latitud astronoacutemica en 80 estaciones y con precisioacuten de un metro en la determinacioacuten del movimiento del polo
En 1967 el polo CIO es aceptado como estaacutendar por la International
Astronomical Union para dar asiacute continuidad a las observaciones maacutes antiguas eferidas al polo CIO por lo que los polos BIH e IPMS se intentan referenciar al polo CIO esto no es posible debido a las precisiones de los diferentes polos ya que se trata de la determinacioacuten de un ciacuterculo aproximadamente de 6 metros de diaacutemetro que queda definido con 3 metros de error en el polo CIO y con un metro en los otros dos es decir en realidad con estas precisiones se estaacute hablando del mismo polo
La situacioacuten se complica a partir de ese antildeo debido a la irrupcioacuten de la
geodesia por sateacutelite Se empiezan a utilizar medidas a sateacutelite para la determinacioacuten del movimiento del polo en concreto medidas Doppler a los sateacutelites de la constelacioacuten TRANSIT alcanzando precisiones de 02 metros
En los antildeos siguientes nuevas teacutecnicas espaciales demuestran la precisioacuten de
las mismas en la determinacioacuten del movimiento del polo medidas laacuteser a sateacutelites o a la Luna VLBI GPS DORIS PRARE Todas estas teacutecnicas se basan en la medicioacuten continua de coordenadas por lo que la monitorizacioacuten del polo es permanente y su precisioacuten se reduce hasta los 6-8 centiacutemetros
Figura 9 Movimientos de largo y corto periodo del polo
11
Asiacute en 1984 la BIH establecioacute un nuevo sistema de referencia terrestre basado
en las coordenadas cartesianas geoceacutentricas de las estaciones fundamentales donde teacutecnicas espaciales habiacutean sido aplicadas este nuevo sistema coincide con el polo CIO astronoacutemico si se tienen en cuanta las precisiones en la determinacioacuten del CIO lo cual permite dar continuidad a las coordenadas determinadas antiguamente
Finalmente en 1987 se creoacute la Internacional Earth Rotacion Service (IERS)
reemplazando a la BIH y a la IPMS para entre otras cosas monitorizar el movimiento del polo basaacutendose en teacutecnicas espaciales de forma continua (obtencioacuten del polo instantaacuteneo figura 10) con lo que el polo BIH determinado en 1984 pasoacute a llamarse polo IERS Desde abril de 2003 el nombre fue cambiado al de Internacional Earth Rotation and Reference Systems Service (IERS) proporcionando las coordenadas instantaacuteneas del polo para cada diacutea referidas al polo IERS cuyo eje X seraacute el meridiano de Greenwich convencional y el eje Y estaacute situado hacia el Oeste (direccioacuten de su sentido positivo) formando 90 grados las unidades de estas coordenadas son segundos de arco figura 11
En las paacuteginas httpwwwiersorg y httphpiersobspmfr se puede
encontrar mucha maacutes informacioacuten Como se ha dicho las mediciones se realizan en un momento determinado (t)
conociendo a traveacutes de los valores proporcionados por la IERS los valores para el movimiento del polo se podraacuten transformar los valores de latitud y longitud instantaacuteneos a valores de latitud y longitud absolutos sobre el sistema de referencia
Figura 10 Polo instantaacuteneo en lila y polo medio en amarillo
Figura 11 Sistema de referencia y coordenadas en las que se expresa el movimiento del polo
12
geoceacutentrico terrestre convencional Los valores de esta correccioacuten rondan los 01 segundos
24- Sistemas de referencia geodeacutesicos
241- Sistemas de referencia geodeacutesicos globales GRS80 y WGS84
Se definiraacute daacutetum como el conjunto de paraacutemetros que definen la posicioacuten de
un elipsoide respecto a la tierra Para determinarlo hace falta conocer la geometriacutea del elipsoide a y f su posicioacuten respecto al geocentro ∆X ∆Y ∆Z (coordenadas del centro del elipsoide respecto al geocentro) su orientacioacuten R1 R2 R3 (orientacioacuten de los ejes del elipsoide respecto a los terrestres) y la escala k
Si ∆X = ∆Y = ∆Z = 0 el daacutetum Geodeacutesico se llama Global o absoluto El Geodetic Reference System 1980 (GRS80) adoptado por la IUGG
(International Union of Geodesy and Geophysics) por su asamblea general de Camberra en 1979 pertenece a este grupo
Este sistema reemplaza al GRS67 por no representar adecuadamente el
tamantildeo forma y el campo gravitatorio con precisioacuten suficiente para la mayoriacutea de aplicaciones geodeacutesicas geofiacutesicas astronoacutemicas e hidrograacuteficas
Los principales paraacutemetros del sistema son
a = 6378137 m (Obtenido a partir de medidas SLR y Doppler) J2 = 10826310-8 (Obtenido a partir de perturbaciones en la oacuterbita de sateacutelites) GM = 3986005108 m3sg2 (Obtenido a partir de SLR LLR y pruebas espaciales) ω = 729311510-11 rdsg (Obtenido a partir de medidas astronoacutemicas) La orientacioacuten del eje Z seraacute la definida por el polo CIO como eje X el meridiano 0 definido por la BIH y el eje Y formando la tripleta dextroacutegira Este sistema sigue en vigor y no se ha actualizado en su definicioacuten ya que se debe tener en cuenta que por debajo del metro en la diferencia de paraacutemetros no existe una diferencia praacutectica en la determinacioacuten de coordenadas Asiacute las mejoras del mismo se consideran avances cientiacuteficos pero el estaacutendar (GRS80) no se debe cambiar
Cuando la informacioacuten sobre el datum se obtiene a partir de posiciones dentro de la oacuterbita de los sateacutelites (determinacioacuten dinaacutemica del sistema) los coeficientes del potencial gravitatorio (J2) asiacute como algunas constantes (ω velocidad de la luz constante gravitatoria geoceacutentrica) forman parte de la definicioacuten del datum ya que se calculan todas juntas
Un ejemplo de eacuteste uacuteltimo grupo es el World Geodetic System 1984 (WGS84)
utilizado por la teacutecnica GPS y obtenido exclusivamente a partir de los datos de la constelacioacuten de sateacutelites GPS
Los valores de sus principales paraacutemetros son
a = 6378137 m
J2 = 108262998310-8
GM = 3986004418108 m3sg2
13
ω = 729311510-11 rdsg
1f = 298257223563
El World Geodetic System 1984 (WGS84) utiliza como eje Z el polo IERS como eje X el meridiano 0 definido por el IERS y el eje Y formando la tripleta dextroacutegira Su origen coincide con el geocentro
A nivel praacutectico tal como se puede deducir el GRS80 y el WGS84 se pueden
considerar ideacutenticos 242- Sistemas de referencia geodeacutesicos locales ED50 Si ∆X ne ∆Y ne∆Z ne 0 nos encontramos ante un datum local El marco local queda definido por siete paraacutemetros (o mejor dicho 6 maacutes una condicioacuten) valores para a y f (geometriacutea del elipsoide) valores de las desviaciones de la vertical (ξ η) y de la ondulacioacuten del geoide (distancia entre el elipsoide de referencia y el geoide) con estos tres paraacutemetros se obtiene la orientacioacuten del elipsoide el acimut geodeacutesico de una liacutenea y como condicioacuten que el semieje menor del elipsoide y el eje medio de rotacioacuten terrestre sean paralelos Ademaacutes se intenta que el elipsoide se ajuste lo maacuteximo posible a la zona a cartografiar de manera que la reduccioacuten de observaciones sea lo maacutes sencilla posible Un ejemplo de este tipo de sistemas es el ED-50 (European Datum de 1950) sistema al que estaacute referida toda la cartografiacutea espantildeola Este sistema adoptoacute el elipsoide de Hayford o Internacional introducido por la IUGG en su asamblea general de 1924 en Madrid donde a y f fueron obtenidas a partir de mediciones astronoacutemicas y geodeacutesicas en los Estados Unidos a = 6378388 f = 1297 Como punto fundamental se adoptoacute Potsdam lugar donde la desviacioacuten de la vertical (diferencia angular entre la vertical geodeacutesica y astronoacutemica) y la ondulacioacuten del geoide son conocidas (ξ = 3rdquo36 η = 1rdquo78 N = 0) de manera que el elipsoide queda orientado respecto a la Tierra Cabe destacar que fijar los valores de la desviacioacuten de la vertical (ξ η) y el valor de la ondulacioacuten del geoide N en el punto fundamental para orientar el elipsoide es equivalente a fijarlo a partir de las coordenadas X Y Z de su centro respecto al geocentro figura 12 La exactitud de ED50 oscila entre unos pocos metros en el centro de Europa a maacutes de 10 en el sur aunque su precisioacuten relativa es mucho mayor y maacutes que suficiente para los levantamientos cartograacuteficos de pequentildeas y medianas escalas por lo que en 1968 el Servicio Geograacutefico del ejeacutercito lo adopta para su cartografiacutea baacutesica 150000 e igualmente el IGN en 1979
14
25- Marco de referencia terrestre internacional (ITRF) El sistema de referencia terrestre internacional convencional se materializa a traveacutes de las coordenadas de una serie de estaciones distribuidas por todo el mundo en ese sistema de referencia constituyendo el ITRF (Internacional Terrestrial Reference Frame) establecido y mantenido por la IERS Baacutesicamente el sistema que materializa se define como geoceacutentrico (incluyendo la atmoacutesfera y los oceacuteanos) la base para la escala la constituye el metro (en el sistema Internacional) y con orientacioacuten de sus ejes tal como establecioacute la BIH en 1984
bull Eje Z Polo medio determinado por la IERS y llamado IERS Reference Pole (IRP) o Convencional Terrestrial Pole (CTP)
bull Eje X Meridiano de Greenwich Convencional determinado por la IERS y
llamado IERS Reference Meridian (IRM) o Greenwich Mean Origin (GMO)
bull Eje Y Formando una tripleta dextroacutegira con los ejes anteriores sobre el
plano del ecuador convencional El marco estaacute formado por coordenadas cartesianas y velocidades de una serie
de estaciones equipadas con teacutecnicas de observacioacuten espacial (VLBI SLR LLR GPS desde 1991 y DORIS desde 1994) en la figura 13 se pueden ver las estaciones para el ITRF2000 Si se desean coordenadas geodeacutesicas se recomienda el uso del elipsoide GRS80 Estas coordenadas definen impliacutecitamente el origen la escala y la orientacioacuten de los ejes coordenados X Y Z del sistema de referencia
La historia de los diferentes ITRF comenzoacute en 1984 y a partir de ahiacute se han obtenido las soluciones 88 89 90 91 92 93 94 96 97 2000 2005 y recientemente la 2008 estas soluciones difieren unas de otras debido a la incorporacioacuten constante de nuevas estaciones nuevas observaciones en las estaciones ya existentes mejora en la precisioacuten de las mismas o nuevos meacutetodos de procesamiento
Figura 12 Sistema geodeacutesico local
Geoide
Elipsoide
X
Y
Z
X
Y
Zo
XoYo
a
b
o
PNbull
bull
(ξ η)
15
Cada una de las teacutecnicas (GPS VLBI LLR SLR o DORIS) genera su propio marco de referencia k con coordenadas y velocidades conocidas para cada estacioacuten i en cada eacutepoca ts de observacioacuten por lo tanto las soluciones de las teacutecnicas se deben
combinar para estimar las posiciones y velocidades en el marco ITRF ( iITRFX y
i
ITRFXbull
) en una eacutepoca de referencia t0 para cada estacioacuten i asiacute como los paraacutemetros de transformacioacuten (factor de escala Dk vector de traslaciones Tk en X Y Z y matriz de
rotaciones Rk sobre los ejes X YZ) y sus variaciones ( KDbull
KTbull
KRbull
) entre el marco ITRF (marco final combinacioacuten de todos los k) y el correspondiente k paraacutemetros que a su vez pueden estar referidos a un eacutepoca tK diferente de las anteriores La combinacioacuten general se ajusta a las ecuaciones
( ) ( )( )
01
i i i i i i i i iks ITRF s ITRF k k ITRF k ITRF s k k ITRF k ITRF
i i i is ITRF k k ITRF k ITRF
X X t t X T D X R X t t T D X R X
X X T D X R X
bull bull bull bull
bull bull bull bull bull
= + minus + + + + minus + +
= + + + La segunda ecuacioacuten se obtiene a partir de derivar la primera y considerar que las derivadas segundas son nulas (aceleracioacuten nula) y que la derivada de i
ITRFX (sobre 10 centiacutemetros por antildeo como media) multiplicada por DK o RK (que son del orden de 10-5) tambieacuten se pueden despreciar Este sistema de ecuaciones es vaacutelido para
bull Observaciones bajo la forma de serie temporal de coordenadas (por ejemplo soluciones semanales para cada estacioacuten y por tanto en su correspondiente eacutepoca ts para una determinada teacutecnica espacial) por lo que la segunda ecuacioacuten (velocidad) del sistema (1) no se utiliza y donde la solucioacuten no es maacutes que la acumulacioacuten de eacutepocas de observacioacuten
bull Observaciones bajo la forma de paraacutemetros globales (coordenadas y
velocidades) vaacutelidos para un intervalo de tiempo elevado (varios antildeos) y
Figura 13 Estaciones que forman el ITRF2000 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
16
centrado en una eacutepoca tk (que puede coincidir o no con la t0 para cada una de las teacutecnicas espaciales)
La conexioacuten entre las diferentes teacutecnicas de observacioacuten se realiza en aquellas estaciones (collocation sites) que posean dos o maacutes teacutecnicas de observacioacuten y sea posible la determinacioacuten precisa (plusmn4-5 mm de error) de los incrementos de coordenadas X Y Z (local ties) entre los instrumentos de medida (receptores GPS o DORIS telescopios y radiotelescopios) utilizando mediciones topograacuteficas o con GPS En cada una de estas estaciones se genera una solucioacuten maacutes de acuerdo con las ecuaciones (1) teniendo en cuenta los incrementos de coordenadas es decir si una estacioacuten posee instrumental VLBI y SLR y se han medido las diferencias entre los dos instrumentos de forma precisa (incrementos de X Y Z) se genera una ecuacioacuten del tipo (1) para la solucioacuten VLBI otra para la SLR y otra con los incrementos observados (por ejemplo la solucioacuten VLBI maacutes los incrementos de manera que se estaacuten dando coordenadas en el marco VLBI a la estacioacuten SLR) El establecimiento de un marco de referencia de precisioacuten no es tarea sencilla ya que la Tierra sufre deformaciones debido a su caraacutecter elaacutestico y las precisiones de las observaciones son cada vez mayores por lo que las observaciones deben ser corregidas por los efectos de
bull Mareas terrestres bull Carga atmosfeacuterica y oceaacutenica
bull Tectoacutenica de placas El modelo utilizado hasta el ITRF2005 (incluido) es el
NNR-NUVEL-1A basado en que no existen rotaciones sobre el manto de las placas tectoacutenicas y por tanto la suma de las velocidades de las placas sobre toda la Tierra es cero Para el ITRF2008 se utiliza un modelo basado en las propias velocidades de las estaciones ITRF observadas con teacutecnicas espaciales el APKIM2005 (las velocidades presentan tambieacuten error ya que se obtienen a partir de caacutelculos)
bull Movimientos locales y regionales Un ejemplo seriacutea el rebote postglacial de
Escandinavia
Por tanto y tal como se pude ver en la tabla 3 el ITRF es un marco dinaacutemico que cambia de acuerdo a las variaciones temporales de las coordenadas y velocidades debido a los efectos anteriores
251- ITRF2000 ITRF2005 e ITRF2008
El marco ITRF2000 estaacute basado en 800 determinaciones en cerca de 500 sitios figura 13 estaacute referido a la eacutepoca 19970 (t0=19970) quedando determinado a partir de soluciones globales para cada marco k en una eacutepoca de referencia tk Para resolver el sistema de ecuaciones (1) es necesario fijar el datum de alguna manera el datum de la solucioacuten ITRF2000 quedoacute definido de la siguiente manera
bull Escala Media ponderada de determinadas medidas VLBI y SLR de alta
precisioacuten Esto se materializa fijando a cero el valor de escala y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 y las estaciones seleccionadas
bull Oriacutegen Media ponderada de determinaciones SLR (el centro de la oacuterbita de los
sateacutelites corresponderaacute al geocentro terrestre) Esto se materializa fijando a cero el valor del vector de traslacioacuten y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 las estaciones seleccionadas
17
bull Orientacioacuten Seleccioacuten de determinadas estaciones ITRF (sus coordenadas y velocidades) de alta calidad geodeacutesica que cumpla con los siguientes criterios
1 Que posea observaciones continuas al menos de los 3 uacuteltimos antildeos 2 Localizado en plataforma riacutegida y lejos de zonas de deformacioacuten 3 Que se haya determinado la velocidad con una precisioacuten mejor a
3mmantildeo 4 Que la velocidad sea menor a 3mmantildeo
Basado en estos criterios las 54 estaciones seleccionadas se pueden ver en la figura 14 como puntos azules En el sistema de ecuaciones (1) se introduce una ecuacioacuten de condicioacuten de forma que para estos puntos seleccionados exista correspondencia entre la orientacioacuten del marco de referencia y la del marco de referencia anterior (ITRF19970 por lo que no seraacuten maacutes que las definidas en la orientacioacuten BIH para 19840) La variacioacuten en la orientacioacuten (variacioacuten de estas coordenadas) seraacute la del modelo NNR-NUVEL-1A
El marco ITRF2005 referido a la eacutepoca 20000 (t0=20000) se ha basado
uacutenicamente en determinaciones SLR VLBI DORIS y GPS en 608 estaciones situadas en 338 localizaciones diferentes figura 15 quedando definido a partir de series temporales continuas de observaciones (soluciones semanales para GPS entre 1996 y 2005 DORIS entre 1993 y 2005 y SLR entre 1993 y 2005 y sesiones diarias para VLBI entre 1981 y 2005) de esta manera se puede realizar un anaacutelisis maacutes riguroso de las observaciones y detectar aquellas que presenten error o discontinuidades en las series Cada eacutepoca genera sistema de ecuaciones (1) para cada teacutecnica y en caso de que una estacioacuten presente una discontinuidad en la serie una nueva posicioacuten y velocidad se deben calcular para esa estacioacuten por lo que las coordenadas y velocidades calculadas lo seraacuten para un cierto intervalo de tiempo El datum se define de la siguiente manera
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20000) y variacioacuten nula
de estos paraacutemetros entre ITRF2005 y las series SLR bull Escala Factor de escala nulo (para la eacutepoca 20000) y variacioacuten nula entre
ITRF2005 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20000) y variaciones nulas entre ITRF2005 y ITRF2000 (en las estaciones ITRF seleccionadas)
Figura 14 En azul se muestran los 54 puntos de la ITRF que cumplen con los 4 criterios y en rojo los que cumplen con los criterios 1 3 y 4
18
En la tabla 1 se pueden ver los paraacutemetros de transformacioacuten entre el marco ITRF2005 y el ITRF2000 usando 70 estaciones especiacuteficas para su caacutelculo (las mismas que las utilizadas para orientar el ITRF2005 al ITRF2000 por lo que no existen paraacutemetros de rotacioacuten en esta transformacioacuten) Los resultados muestran las traslaciones del geocentro en miliacutemetros y el factor de escala en partes por billoacuten (con la notacioacuten americana es decir 10-9) asiacute como sus variaciones temporales (miliacutemetrosantildeo y ppbantildeo) Los resultados de la transformacioacuten muestran una variacioacuten temporal de 18 miliacutemetros por antildeo entre ITRF2005 e ITRF2000 esta velocidad de movimiento del geocentro no genera la estabilidad deseada del marco de referencia por lo que este marco se debe cambiar raacutepidamente Se cree que este movimiento se debe a la reduccioacuten de estaciones SLR con el tiempo asiacute como a su mala distribucioacuten geograacutefica (muchas maacutes en el hemisferio Norte que en el Sur) asiacute como la utilizacioacuten de diferentes modelos de procesamiento SLR para la solucioacuten ITRF2005 y la ITRF2000
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) 01 -08 -58 040 -02 01 -18 008
En base a esta uacuteltima conclusioacuten el marco ITRF2008 referido a la eacutepoca 20050 (t0=20050) se basa en el reprocesamiento de todas las series de observaciones de las cuatro teacutecnicas espaciales utilizadas (VLBI entre 1980 y 2009 GPSGNSS entre 1997 y 2009 SLR entre 1983 y 2009 DORIS entre 1993 y 2009) de manera que utilicen estaacutendares actuales e ideacutenticos y el mismo software para la reduccioacuten modelizacioacuten y correccioacuten de observaciones (modelos de troposfera e ionosfera centros de fase de emisioacuten de los sateacutelites y receptores etc) De esta manera el marco ITRF conservaraacute su definicioacuten a lo largo del tiempo en cuanto a origen escala y orientacioacuten (se produciraacuten series temporales de observaciones homogeacuteneas) por lo que los estudios de deformacioacuten dinaacutemica terrestre saldraacuten beneficiados (por ejemplo es esencial para el estudio del nivel medio del mar y su variacioacuten global y regional que el marco de referencia se defina siempre igual) 608 estaciones situadas en 338 localizaciones diferentes constituyen el marco El datum ITRF2008 se define de la siguiente manera
Figura 15 Estaciones que forman el ITRF2005 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
Tabla 1 Paraacutemetros de transformacioacuten entre los marcos ITRF2005 e ITRF2000 los paraacutemetros de rotacioacuten y sus variaciones son cero
19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report
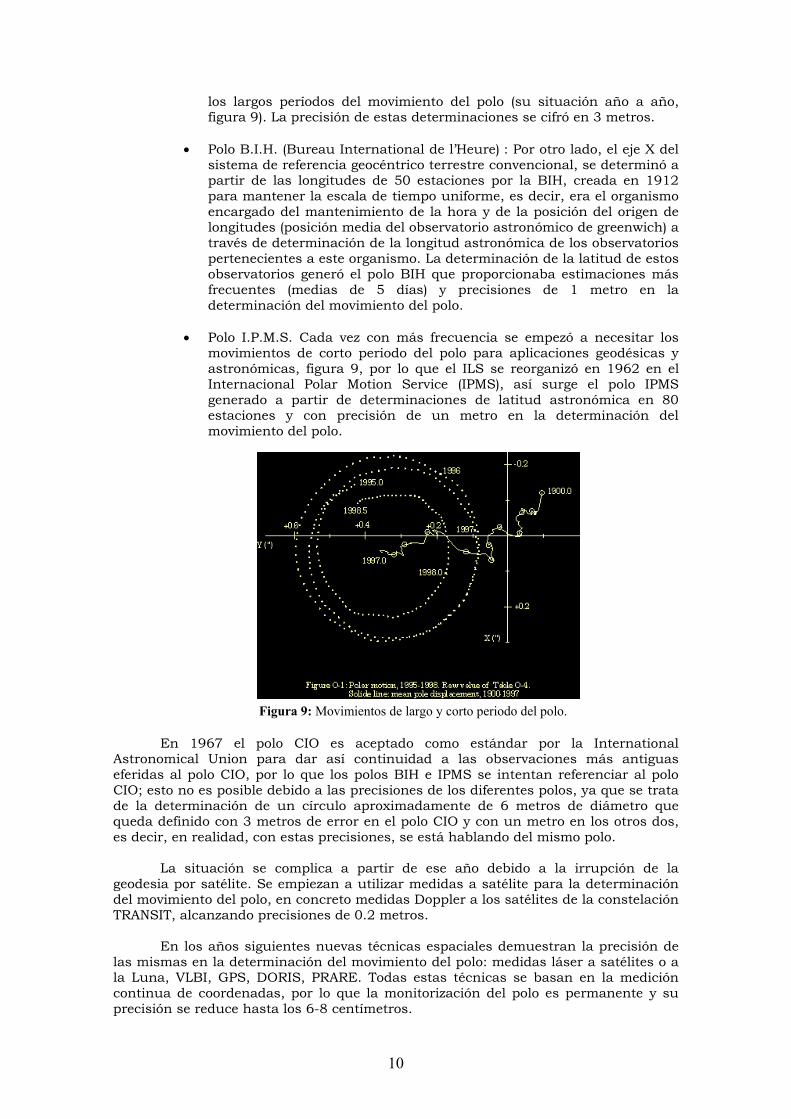
10
los largos periacuteodos del movimiento del polo (su situacioacuten antildeo a antildeo figura 9) La precisioacuten de estas determinaciones se cifroacute en 3 metros
bull Polo BIH (Bureau International de lrsquoHeure) Por otro lado el eje X del
sistema de referencia geoceacutentrico terrestre convencional se determinoacute a partir de las longitudes de 50 estaciones por la BIH creada en 1912 para mantener la escala de tiempo uniforme es decir era el organismo encargado del mantenimiento de la hora y de la posicioacuten del origen de longitudes (posicioacuten media del observatorio astronoacutemico de greenwich) a traveacutes de determinacioacuten de la longitud astronoacutemica de los observatorios pertenecientes a este organismo La determinacioacuten de la latitud de estos observatorios generoacute el polo BIH que proporcionaba estimaciones maacutes frecuentes (medias de 5 diacuteas) y precisiones de 1 metro en la determinacioacuten del movimiento del polo
bull Polo IPMS Cada vez con maacutes frecuencia se empezoacute a necesitar los
movimientos de corto periodo del polo para aplicaciones geodeacutesicas y astronoacutemicas figura 9 por lo que el ILS se reorganizoacute en 1962 en el Internacional Polar Motion Service (IPMS) asiacute surge el polo IPMS generado a partir de determinaciones de latitud astronoacutemica en 80 estaciones y con precisioacuten de un metro en la determinacioacuten del movimiento del polo
En 1967 el polo CIO es aceptado como estaacutendar por la International
Astronomical Union para dar asiacute continuidad a las observaciones maacutes antiguas eferidas al polo CIO por lo que los polos BIH e IPMS se intentan referenciar al polo CIO esto no es posible debido a las precisiones de los diferentes polos ya que se trata de la determinacioacuten de un ciacuterculo aproximadamente de 6 metros de diaacutemetro que queda definido con 3 metros de error en el polo CIO y con un metro en los otros dos es decir en realidad con estas precisiones se estaacute hablando del mismo polo
La situacioacuten se complica a partir de ese antildeo debido a la irrupcioacuten de la
geodesia por sateacutelite Se empiezan a utilizar medidas a sateacutelite para la determinacioacuten del movimiento del polo en concreto medidas Doppler a los sateacutelites de la constelacioacuten TRANSIT alcanzando precisiones de 02 metros
En los antildeos siguientes nuevas teacutecnicas espaciales demuestran la precisioacuten de
las mismas en la determinacioacuten del movimiento del polo medidas laacuteser a sateacutelites o a la Luna VLBI GPS DORIS PRARE Todas estas teacutecnicas se basan en la medicioacuten continua de coordenadas por lo que la monitorizacioacuten del polo es permanente y su precisioacuten se reduce hasta los 6-8 centiacutemetros
Figura 9 Movimientos de largo y corto periodo del polo
11
Asiacute en 1984 la BIH establecioacute un nuevo sistema de referencia terrestre basado
en las coordenadas cartesianas geoceacutentricas de las estaciones fundamentales donde teacutecnicas espaciales habiacutean sido aplicadas este nuevo sistema coincide con el polo CIO astronoacutemico si se tienen en cuanta las precisiones en la determinacioacuten del CIO lo cual permite dar continuidad a las coordenadas determinadas antiguamente
Finalmente en 1987 se creoacute la Internacional Earth Rotacion Service (IERS)
reemplazando a la BIH y a la IPMS para entre otras cosas monitorizar el movimiento del polo basaacutendose en teacutecnicas espaciales de forma continua (obtencioacuten del polo instantaacuteneo figura 10) con lo que el polo BIH determinado en 1984 pasoacute a llamarse polo IERS Desde abril de 2003 el nombre fue cambiado al de Internacional Earth Rotation and Reference Systems Service (IERS) proporcionando las coordenadas instantaacuteneas del polo para cada diacutea referidas al polo IERS cuyo eje X seraacute el meridiano de Greenwich convencional y el eje Y estaacute situado hacia el Oeste (direccioacuten de su sentido positivo) formando 90 grados las unidades de estas coordenadas son segundos de arco figura 11
En las paacuteginas httpwwwiersorg y httphpiersobspmfr se puede
encontrar mucha maacutes informacioacuten Como se ha dicho las mediciones se realizan en un momento determinado (t)
conociendo a traveacutes de los valores proporcionados por la IERS los valores para el movimiento del polo se podraacuten transformar los valores de latitud y longitud instantaacuteneos a valores de latitud y longitud absolutos sobre el sistema de referencia
Figura 10 Polo instantaacuteneo en lila y polo medio en amarillo
Figura 11 Sistema de referencia y coordenadas en las que se expresa el movimiento del polo
12
geoceacutentrico terrestre convencional Los valores de esta correccioacuten rondan los 01 segundos
24- Sistemas de referencia geodeacutesicos
241- Sistemas de referencia geodeacutesicos globales GRS80 y WGS84
Se definiraacute daacutetum como el conjunto de paraacutemetros que definen la posicioacuten de
un elipsoide respecto a la tierra Para determinarlo hace falta conocer la geometriacutea del elipsoide a y f su posicioacuten respecto al geocentro ∆X ∆Y ∆Z (coordenadas del centro del elipsoide respecto al geocentro) su orientacioacuten R1 R2 R3 (orientacioacuten de los ejes del elipsoide respecto a los terrestres) y la escala k
Si ∆X = ∆Y = ∆Z = 0 el daacutetum Geodeacutesico se llama Global o absoluto El Geodetic Reference System 1980 (GRS80) adoptado por la IUGG
(International Union of Geodesy and Geophysics) por su asamblea general de Camberra en 1979 pertenece a este grupo
Este sistema reemplaza al GRS67 por no representar adecuadamente el
tamantildeo forma y el campo gravitatorio con precisioacuten suficiente para la mayoriacutea de aplicaciones geodeacutesicas geofiacutesicas astronoacutemicas e hidrograacuteficas
Los principales paraacutemetros del sistema son
a = 6378137 m (Obtenido a partir de medidas SLR y Doppler) J2 = 10826310-8 (Obtenido a partir de perturbaciones en la oacuterbita de sateacutelites) GM = 3986005108 m3sg2 (Obtenido a partir de SLR LLR y pruebas espaciales) ω = 729311510-11 rdsg (Obtenido a partir de medidas astronoacutemicas) La orientacioacuten del eje Z seraacute la definida por el polo CIO como eje X el meridiano 0 definido por la BIH y el eje Y formando la tripleta dextroacutegira Este sistema sigue en vigor y no se ha actualizado en su definicioacuten ya que se debe tener en cuenta que por debajo del metro en la diferencia de paraacutemetros no existe una diferencia praacutectica en la determinacioacuten de coordenadas Asiacute las mejoras del mismo se consideran avances cientiacuteficos pero el estaacutendar (GRS80) no se debe cambiar
Cuando la informacioacuten sobre el datum se obtiene a partir de posiciones dentro de la oacuterbita de los sateacutelites (determinacioacuten dinaacutemica del sistema) los coeficientes del potencial gravitatorio (J2) asiacute como algunas constantes (ω velocidad de la luz constante gravitatoria geoceacutentrica) forman parte de la definicioacuten del datum ya que se calculan todas juntas
Un ejemplo de eacuteste uacuteltimo grupo es el World Geodetic System 1984 (WGS84)
utilizado por la teacutecnica GPS y obtenido exclusivamente a partir de los datos de la constelacioacuten de sateacutelites GPS
Los valores de sus principales paraacutemetros son
a = 6378137 m
J2 = 108262998310-8
GM = 3986004418108 m3sg2
13
ω = 729311510-11 rdsg
1f = 298257223563
El World Geodetic System 1984 (WGS84) utiliza como eje Z el polo IERS como eje X el meridiano 0 definido por el IERS y el eje Y formando la tripleta dextroacutegira Su origen coincide con el geocentro
A nivel praacutectico tal como se puede deducir el GRS80 y el WGS84 se pueden
considerar ideacutenticos 242- Sistemas de referencia geodeacutesicos locales ED50 Si ∆X ne ∆Y ne∆Z ne 0 nos encontramos ante un datum local El marco local queda definido por siete paraacutemetros (o mejor dicho 6 maacutes una condicioacuten) valores para a y f (geometriacutea del elipsoide) valores de las desviaciones de la vertical (ξ η) y de la ondulacioacuten del geoide (distancia entre el elipsoide de referencia y el geoide) con estos tres paraacutemetros se obtiene la orientacioacuten del elipsoide el acimut geodeacutesico de una liacutenea y como condicioacuten que el semieje menor del elipsoide y el eje medio de rotacioacuten terrestre sean paralelos Ademaacutes se intenta que el elipsoide se ajuste lo maacuteximo posible a la zona a cartografiar de manera que la reduccioacuten de observaciones sea lo maacutes sencilla posible Un ejemplo de este tipo de sistemas es el ED-50 (European Datum de 1950) sistema al que estaacute referida toda la cartografiacutea espantildeola Este sistema adoptoacute el elipsoide de Hayford o Internacional introducido por la IUGG en su asamblea general de 1924 en Madrid donde a y f fueron obtenidas a partir de mediciones astronoacutemicas y geodeacutesicas en los Estados Unidos a = 6378388 f = 1297 Como punto fundamental se adoptoacute Potsdam lugar donde la desviacioacuten de la vertical (diferencia angular entre la vertical geodeacutesica y astronoacutemica) y la ondulacioacuten del geoide son conocidas (ξ = 3rdquo36 η = 1rdquo78 N = 0) de manera que el elipsoide queda orientado respecto a la Tierra Cabe destacar que fijar los valores de la desviacioacuten de la vertical (ξ η) y el valor de la ondulacioacuten del geoide N en el punto fundamental para orientar el elipsoide es equivalente a fijarlo a partir de las coordenadas X Y Z de su centro respecto al geocentro figura 12 La exactitud de ED50 oscila entre unos pocos metros en el centro de Europa a maacutes de 10 en el sur aunque su precisioacuten relativa es mucho mayor y maacutes que suficiente para los levantamientos cartograacuteficos de pequentildeas y medianas escalas por lo que en 1968 el Servicio Geograacutefico del ejeacutercito lo adopta para su cartografiacutea baacutesica 150000 e igualmente el IGN en 1979
14
25- Marco de referencia terrestre internacional (ITRF) El sistema de referencia terrestre internacional convencional se materializa a traveacutes de las coordenadas de una serie de estaciones distribuidas por todo el mundo en ese sistema de referencia constituyendo el ITRF (Internacional Terrestrial Reference Frame) establecido y mantenido por la IERS Baacutesicamente el sistema que materializa se define como geoceacutentrico (incluyendo la atmoacutesfera y los oceacuteanos) la base para la escala la constituye el metro (en el sistema Internacional) y con orientacioacuten de sus ejes tal como establecioacute la BIH en 1984
bull Eje Z Polo medio determinado por la IERS y llamado IERS Reference Pole (IRP) o Convencional Terrestrial Pole (CTP)
bull Eje X Meridiano de Greenwich Convencional determinado por la IERS y
llamado IERS Reference Meridian (IRM) o Greenwich Mean Origin (GMO)
bull Eje Y Formando una tripleta dextroacutegira con los ejes anteriores sobre el
plano del ecuador convencional El marco estaacute formado por coordenadas cartesianas y velocidades de una serie
de estaciones equipadas con teacutecnicas de observacioacuten espacial (VLBI SLR LLR GPS desde 1991 y DORIS desde 1994) en la figura 13 se pueden ver las estaciones para el ITRF2000 Si se desean coordenadas geodeacutesicas se recomienda el uso del elipsoide GRS80 Estas coordenadas definen impliacutecitamente el origen la escala y la orientacioacuten de los ejes coordenados X Y Z del sistema de referencia
La historia de los diferentes ITRF comenzoacute en 1984 y a partir de ahiacute se han obtenido las soluciones 88 89 90 91 92 93 94 96 97 2000 2005 y recientemente la 2008 estas soluciones difieren unas de otras debido a la incorporacioacuten constante de nuevas estaciones nuevas observaciones en las estaciones ya existentes mejora en la precisioacuten de las mismas o nuevos meacutetodos de procesamiento
Figura 12 Sistema geodeacutesico local
Geoide
Elipsoide
X
Y
Z
X
Y
Zo
XoYo
a
b
o
PNbull
bull
(ξ η)
15
Cada una de las teacutecnicas (GPS VLBI LLR SLR o DORIS) genera su propio marco de referencia k con coordenadas y velocidades conocidas para cada estacioacuten i en cada eacutepoca ts de observacioacuten por lo tanto las soluciones de las teacutecnicas se deben
combinar para estimar las posiciones y velocidades en el marco ITRF ( iITRFX y
i
ITRFXbull
) en una eacutepoca de referencia t0 para cada estacioacuten i asiacute como los paraacutemetros de transformacioacuten (factor de escala Dk vector de traslaciones Tk en X Y Z y matriz de
rotaciones Rk sobre los ejes X YZ) y sus variaciones ( KDbull
KTbull
KRbull
) entre el marco ITRF (marco final combinacioacuten de todos los k) y el correspondiente k paraacutemetros que a su vez pueden estar referidos a un eacutepoca tK diferente de las anteriores La combinacioacuten general se ajusta a las ecuaciones
( ) ( )( )
01
i i i i i i i i iks ITRF s ITRF k k ITRF k ITRF s k k ITRF k ITRF
i i i is ITRF k k ITRF k ITRF
X X t t X T D X R X t t T D X R X
X X T D X R X
bull bull bull bull
bull bull bull bull bull
= + minus + + + + minus + +
= + + + La segunda ecuacioacuten se obtiene a partir de derivar la primera y considerar que las derivadas segundas son nulas (aceleracioacuten nula) y que la derivada de i
ITRFX (sobre 10 centiacutemetros por antildeo como media) multiplicada por DK o RK (que son del orden de 10-5) tambieacuten se pueden despreciar Este sistema de ecuaciones es vaacutelido para
bull Observaciones bajo la forma de serie temporal de coordenadas (por ejemplo soluciones semanales para cada estacioacuten y por tanto en su correspondiente eacutepoca ts para una determinada teacutecnica espacial) por lo que la segunda ecuacioacuten (velocidad) del sistema (1) no se utiliza y donde la solucioacuten no es maacutes que la acumulacioacuten de eacutepocas de observacioacuten
bull Observaciones bajo la forma de paraacutemetros globales (coordenadas y
velocidades) vaacutelidos para un intervalo de tiempo elevado (varios antildeos) y
Figura 13 Estaciones que forman el ITRF2000 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
16
centrado en una eacutepoca tk (que puede coincidir o no con la t0 para cada una de las teacutecnicas espaciales)
La conexioacuten entre las diferentes teacutecnicas de observacioacuten se realiza en aquellas estaciones (collocation sites) que posean dos o maacutes teacutecnicas de observacioacuten y sea posible la determinacioacuten precisa (plusmn4-5 mm de error) de los incrementos de coordenadas X Y Z (local ties) entre los instrumentos de medida (receptores GPS o DORIS telescopios y radiotelescopios) utilizando mediciones topograacuteficas o con GPS En cada una de estas estaciones se genera una solucioacuten maacutes de acuerdo con las ecuaciones (1) teniendo en cuenta los incrementos de coordenadas es decir si una estacioacuten posee instrumental VLBI y SLR y se han medido las diferencias entre los dos instrumentos de forma precisa (incrementos de X Y Z) se genera una ecuacioacuten del tipo (1) para la solucioacuten VLBI otra para la SLR y otra con los incrementos observados (por ejemplo la solucioacuten VLBI maacutes los incrementos de manera que se estaacuten dando coordenadas en el marco VLBI a la estacioacuten SLR) El establecimiento de un marco de referencia de precisioacuten no es tarea sencilla ya que la Tierra sufre deformaciones debido a su caraacutecter elaacutestico y las precisiones de las observaciones son cada vez mayores por lo que las observaciones deben ser corregidas por los efectos de
bull Mareas terrestres bull Carga atmosfeacuterica y oceaacutenica
bull Tectoacutenica de placas El modelo utilizado hasta el ITRF2005 (incluido) es el
NNR-NUVEL-1A basado en que no existen rotaciones sobre el manto de las placas tectoacutenicas y por tanto la suma de las velocidades de las placas sobre toda la Tierra es cero Para el ITRF2008 se utiliza un modelo basado en las propias velocidades de las estaciones ITRF observadas con teacutecnicas espaciales el APKIM2005 (las velocidades presentan tambieacuten error ya que se obtienen a partir de caacutelculos)
bull Movimientos locales y regionales Un ejemplo seriacutea el rebote postglacial de
Escandinavia
Por tanto y tal como se pude ver en la tabla 3 el ITRF es un marco dinaacutemico que cambia de acuerdo a las variaciones temporales de las coordenadas y velocidades debido a los efectos anteriores
251- ITRF2000 ITRF2005 e ITRF2008
El marco ITRF2000 estaacute basado en 800 determinaciones en cerca de 500 sitios figura 13 estaacute referido a la eacutepoca 19970 (t0=19970) quedando determinado a partir de soluciones globales para cada marco k en una eacutepoca de referencia tk Para resolver el sistema de ecuaciones (1) es necesario fijar el datum de alguna manera el datum de la solucioacuten ITRF2000 quedoacute definido de la siguiente manera
bull Escala Media ponderada de determinadas medidas VLBI y SLR de alta
precisioacuten Esto se materializa fijando a cero el valor de escala y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 y las estaciones seleccionadas
bull Oriacutegen Media ponderada de determinaciones SLR (el centro de la oacuterbita de los
sateacutelites corresponderaacute al geocentro terrestre) Esto se materializa fijando a cero el valor del vector de traslacioacuten y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 las estaciones seleccionadas
17
bull Orientacioacuten Seleccioacuten de determinadas estaciones ITRF (sus coordenadas y velocidades) de alta calidad geodeacutesica que cumpla con los siguientes criterios
1 Que posea observaciones continuas al menos de los 3 uacuteltimos antildeos 2 Localizado en plataforma riacutegida y lejos de zonas de deformacioacuten 3 Que se haya determinado la velocidad con una precisioacuten mejor a
3mmantildeo 4 Que la velocidad sea menor a 3mmantildeo
Basado en estos criterios las 54 estaciones seleccionadas se pueden ver en la figura 14 como puntos azules En el sistema de ecuaciones (1) se introduce una ecuacioacuten de condicioacuten de forma que para estos puntos seleccionados exista correspondencia entre la orientacioacuten del marco de referencia y la del marco de referencia anterior (ITRF19970 por lo que no seraacuten maacutes que las definidas en la orientacioacuten BIH para 19840) La variacioacuten en la orientacioacuten (variacioacuten de estas coordenadas) seraacute la del modelo NNR-NUVEL-1A
El marco ITRF2005 referido a la eacutepoca 20000 (t0=20000) se ha basado
uacutenicamente en determinaciones SLR VLBI DORIS y GPS en 608 estaciones situadas en 338 localizaciones diferentes figura 15 quedando definido a partir de series temporales continuas de observaciones (soluciones semanales para GPS entre 1996 y 2005 DORIS entre 1993 y 2005 y SLR entre 1993 y 2005 y sesiones diarias para VLBI entre 1981 y 2005) de esta manera se puede realizar un anaacutelisis maacutes riguroso de las observaciones y detectar aquellas que presenten error o discontinuidades en las series Cada eacutepoca genera sistema de ecuaciones (1) para cada teacutecnica y en caso de que una estacioacuten presente una discontinuidad en la serie una nueva posicioacuten y velocidad se deben calcular para esa estacioacuten por lo que las coordenadas y velocidades calculadas lo seraacuten para un cierto intervalo de tiempo El datum se define de la siguiente manera
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20000) y variacioacuten nula
de estos paraacutemetros entre ITRF2005 y las series SLR bull Escala Factor de escala nulo (para la eacutepoca 20000) y variacioacuten nula entre
ITRF2005 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20000) y variaciones nulas entre ITRF2005 y ITRF2000 (en las estaciones ITRF seleccionadas)
Figura 14 En azul se muestran los 54 puntos de la ITRF que cumplen con los 4 criterios y en rojo los que cumplen con los criterios 1 3 y 4
18
En la tabla 1 se pueden ver los paraacutemetros de transformacioacuten entre el marco ITRF2005 y el ITRF2000 usando 70 estaciones especiacuteficas para su caacutelculo (las mismas que las utilizadas para orientar el ITRF2005 al ITRF2000 por lo que no existen paraacutemetros de rotacioacuten en esta transformacioacuten) Los resultados muestran las traslaciones del geocentro en miliacutemetros y el factor de escala en partes por billoacuten (con la notacioacuten americana es decir 10-9) asiacute como sus variaciones temporales (miliacutemetrosantildeo y ppbantildeo) Los resultados de la transformacioacuten muestran una variacioacuten temporal de 18 miliacutemetros por antildeo entre ITRF2005 e ITRF2000 esta velocidad de movimiento del geocentro no genera la estabilidad deseada del marco de referencia por lo que este marco se debe cambiar raacutepidamente Se cree que este movimiento se debe a la reduccioacuten de estaciones SLR con el tiempo asiacute como a su mala distribucioacuten geograacutefica (muchas maacutes en el hemisferio Norte que en el Sur) asiacute como la utilizacioacuten de diferentes modelos de procesamiento SLR para la solucioacuten ITRF2005 y la ITRF2000
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) 01 -08 -58 040 -02 01 -18 008
En base a esta uacuteltima conclusioacuten el marco ITRF2008 referido a la eacutepoca 20050 (t0=20050) se basa en el reprocesamiento de todas las series de observaciones de las cuatro teacutecnicas espaciales utilizadas (VLBI entre 1980 y 2009 GPSGNSS entre 1997 y 2009 SLR entre 1983 y 2009 DORIS entre 1993 y 2009) de manera que utilicen estaacutendares actuales e ideacutenticos y el mismo software para la reduccioacuten modelizacioacuten y correccioacuten de observaciones (modelos de troposfera e ionosfera centros de fase de emisioacuten de los sateacutelites y receptores etc) De esta manera el marco ITRF conservaraacute su definicioacuten a lo largo del tiempo en cuanto a origen escala y orientacioacuten (se produciraacuten series temporales de observaciones homogeacuteneas) por lo que los estudios de deformacioacuten dinaacutemica terrestre saldraacuten beneficiados (por ejemplo es esencial para el estudio del nivel medio del mar y su variacioacuten global y regional que el marco de referencia se defina siempre igual) 608 estaciones situadas en 338 localizaciones diferentes constituyen el marco El datum ITRF2008 se define de la siguiente manera
Figura 15 Estaciones que forman el ITRF2005 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
Tabla 1 Paraacutemetros de transformacioacuten entre los marcos ITRF2005 e ITRF2000 los paraacutemetros de rotacioacuten y sus variaciones son cero
19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report
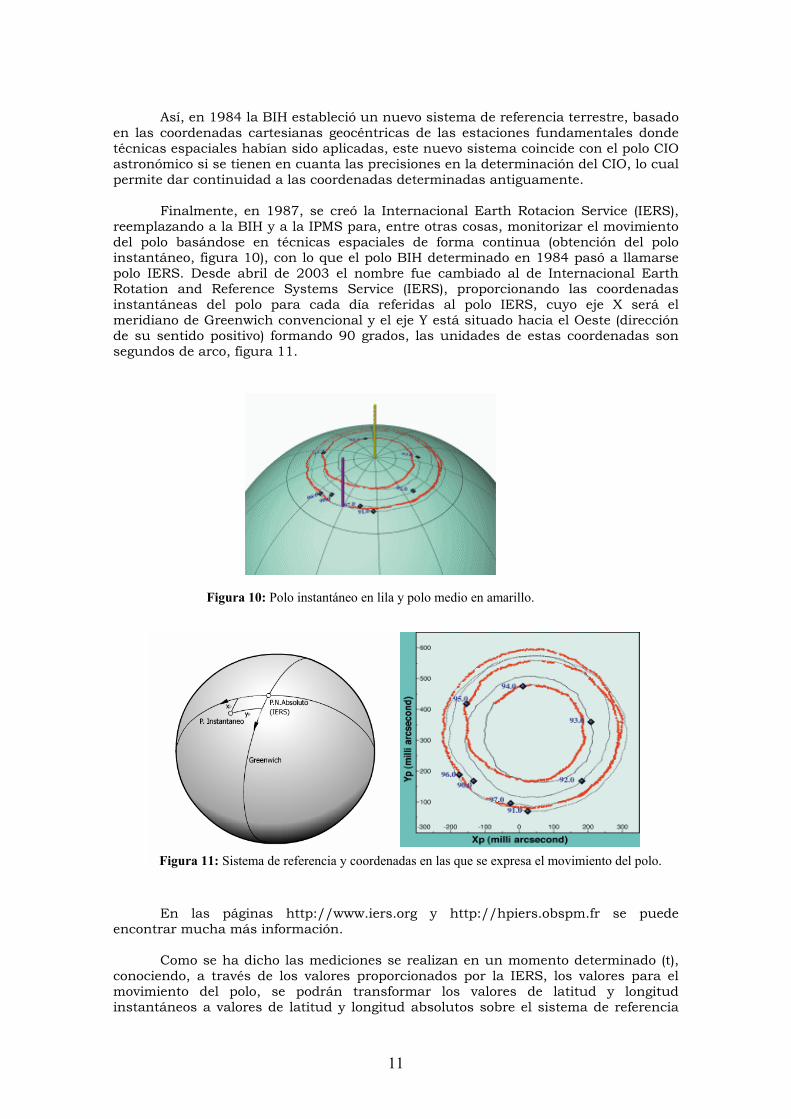
11
Asiacute en 1984 la BIH establecioacute un nuevo sistema de referencia terrestre basado
en las coordenadas cartesianas geoceacutentricas de las estaciones fundamentales donde teacutecnicas espaciales habiacutean sido aplicadas este nuevo sistema coincide con el polo CIO astronoacutemico si se tienen en cuanta las precisiones en la determinacioacuten del CIO lo cual permite dar continuidad a las coordenadas determinadas antiguamente
Finalmente en 1987 se creoacute la Internacional Earth Rotacion Service (IERS)
reemplazando a la BIH y a la IPMS para entre otras cosas monitorizar el movimiento del polo basaacutendose en teacutecnicas espaciales de forma continua (obtencioacuten del polo instantaacuteneo figura 10) con lo que el polo BIH determinado en 1984 pasoacute a llamarse polo IERS Desde abril de 2003 el nombre fue cambiado al de Internacional Earth Rotation and Reference Systems Service (IERS) proporcionando las coordenadas instantaacuteneas del polo para cada diacutea referidas al polo IERS cuyo eje X seraacute el meridiano de Greenwich convencional y el eje Y estaacute situado hacia el Oeste (direccioacuten de su sentido positivo) formando 90 grados las unidades de estas coordenadas son segundos de arco figura 11
En las paacuteginas httpwwwiersorg y httphpiersobspmfr se puede
encontrar mucha maacutes informacioacuten Como se ha dicho las mediciones se realizan en un momento determinado (t)
conociendo a traveacutes de los valores proporcionados por la IERS los valores para el movimiento del polo se podraacuten transformar los valores de latitud y longitud instantaacuteneos a valores de latitud y longitud absolutos sobre el sistema de referencia
Figura 10 Polo instantaacuteneo en lila y polo medio en amarillo
Figura 11 Sistema de referencia y coordenadas en las que se expresa el movimiento del polo
12
geoceacutentrico terrestre convencional Los valores de esta correccioacuten rondan los 01 segundos
24- Sistemas de referencia geodeacutesicos
241- Sistemas de referencia geodeacutesicos globales GRS80 y WGS84
Se definiraacute daacutetum como el conjunto de paraacutemetros que definen la posicioacuten de
un elipsoide respecto a la tierra Para determinarlo hace falta conocer la geometriacutea del elipsoide a y f su posicioacuten respecto al geocentro ∆X ∆Y ∆Z (coordenadas del centro del elipsoide respecto al geocentro) su orientacioacuten R1 R2 R3 (orientacioacuten de los ejes del elipsoide respecto a los terrestres) y la escala k
Si ∆X = ∆Y = ∆Z = 0 el daacutetum Geodeacutesico se llama Global o absoluto El Geodetic Reference System 1980 (GRS80) adoptado por la IUGG
(International Union of Geodesy and Geophysics) por su asamblea general de Camberra en 1979 pertenece a este grupo
Este sistema reemplaza al GRS67 por no representar adecuadamente el
tamantildeo forma y el campo gravitatorio con precisioacuten suficiente para la mayoriacutea de aplicaciones geodeacutesicas geofiacutesicas astronoacutemicas e hidrograacuteficas
Los principales paraacutemetros del sistema son
a = 6378137 m (Obtenido a partir de medidas SLR y Doppler) J2 = 10826310-8 (Obtenido a partir de perturbaciones en la oacuterbita de sateacutelites) GM = 3986005108 m3sg2 (Obtenido a partir de SLR LLR y pruebas espaciales) ω = 729311510-11 rdsg (Obtenido a partir de medidas astronoacutemicas) La orientacioacuten del eje Z seraacute la definida por el polo CIO como eje X el meridiano 0 definido por la BIH y el eje Y formando la tripleta dextroacutegira Este sistema sigue en vigor y no se ha actualizado en su definicioacuten ya que se debe tener en cuenta que por debajo del metro en la diferencia de paraacutemetros no existe una diferencia praacutectica en la determinacioacuten de coordenadas Asiacute las mejoras del mismo se consideran avances cientiacuteficos pero el estaacutendar (GRS80) no se debe cambiar
Cuando la informacioacuten sobre el datum se obtiene a partir de posiciones dentro de la oacuterbita de los sateacutelites (determinacioacuten dinaacutemica del sistema) los coeficientes del potencial gravitatorio (J2) asiacute como algunas constantes (ω velocidad de la luz constante gravitatoria geoceacutentrica) forman parte de la definicioacuten del datum ya que se calculan todas juntas
Un ejemplo de eacuteste uacuteltimo grupo es el World Geodetic System 1984 (WGS84)
utilizado por la teacutecnica GPS y obtenido exclusivamente a partir de los datos de la constelacioacuten de sateacutelites GPS
Los valores de sus principales paraacutemetros son
a = 6378137 m
J2 = 108262998310-8
GM = 3986004418108 m3sg2
13
ω = 729311510-11 rdsg
1f = 298257223563
El World Geodetic System 1984 (WGS84) utiliza como eje Z el polo IERS como eje X el meridiano 0 definido por el IERS y el eje Y formando la tripleta dextroacutegira Su origen coincide con el geocentro
A nivel praacutectico tal como se puede deducir el GRS80 y el WGS84 se pueden
considerar ideacutenticos 242- Sistemas de referencia geodeacutesicos locales ED50 Si ∆X ne ∆Y ne∆Z ne 0 nos encontramos ante un datum local El marco local queda definido por siete paraacutemetros (o mejor dicho 6 maacutes una condicioacuten) valores para a y f (geometriacutea del elipsoide) valores de las desviaciones de la vertical (ξ η) y de la ondulacioacuten del geoide (distancia entre el elipsoide de referencia y el geoide) con estos tres paraacutemetros se obtiene la orientacioacuten del elipsoide el acimut geodeacutesico de una liacutenea y como condicioacuten que el semieje menor del elipsoide y el eje medio de rotacioacuten terrestre sean paralelos Ademaacutes se intenta que el elipsoide se ajuste lo maacuteximo posible a la zona a cartografiar de manera que la reduccioacuten de observaciones sea lo maacutes sencilla posible Un ejemplo de este tipo de sistemas es el ED-50 (European Datum de 1950) sistema al que estaacute referida toda la cartografiacutea espantildeola Este sistema adoptoacute el elipsoide de Hayford o Internacional introducido por la IUGG en su asamblea general de 1924 en Madrid donde a y f fueron obtenidas a partir de mediciones astronoacutemicas y geodeacutesicas en los Estados Unidos a = 6378388 f = 1297 Como punto fundamental se adoptoacute Potsdam lugar donde la desviacioacuten de la vertical (diferencia angular entre la vertical geodeacutesica y astronoacutemica) y la ondulacioacuten del geoide son conocidas (ξ = 3rdquo36 η = 1rdquo78 N = 0) de manera que el elipsoide queda orientado respecto a la Tierra Cabe destacar que fijar los valores de la desviacioacuten de la vertical (ξ η) y el valor de la ondulacioacuten del geoide N en el punto fundamental para orientar el elipsoide es equivalente a fijarlo a partir de las coordenadas X Y Z de su centro respecto al geocentro figura 12 La exactitud de ED50 oscila entre unos pocos metros en el centro de Europa a maacutes de 10 en el sur aunque su precisioacuten relativa es mucho mayor y maacutes que suficiente para los levantamientos cartograacuteficos de pequentildeas y medianas escalas por lo que en 1968 el Servicio Geograacutefico del ejeacutercito lo adopta para su cartografiacutea baacutesica 150000 e igualmente el IGN en 1979
14
25- Marco de referencia terrestre internacional (ITRF) El sistema de referencia terrestre internacional convencional se materializa a traveacutes de las coordenadas de una serie de estaciones distribuidas por todo el mundo en ese sistema de referencia constituyendo el ITRF (Internacional Terrestrial Reference Frame) establecido y mantenido por la IERS Baacutesicamente el sistema que materializa se define como geoceacutentrico (incluyendo la atmoacutesfera y los oceacuteanos) la base para la escala la constituye el metro (en el sistema Internacional) y con orientacioacuten de sus ejes tal como establecioacute la BIH en 1984
bull Eje Z Polo medio determinado por la IERS y llamado IERS Reference Pole (IRP) o Convencional Terrestrial Pole (CTP)
bull Eje X Meridiano de Greenwich Convencional determinado por la IERS y
llamado IERS Reference Meridian (IRM) o Greenwich Mean Origin (GMO)
bull Eje Y Formando una tripleta dextroacutegira con los ejes anteriores sobre el
plano del ecuador convencional El marco estaacute formado por coordenadas cartesianas y velocidades de una serie
de estaciones equipadas con teacutecnicas de observacioacuten espacial (VLBI SLR LLR GPS desde 1991 y DORIS desde 1994) en la figura 13 se pueden ver las estaciones para el ITRF2000 Si se desean coordenadas geodeacutesicas se recomienda el uso del elipsoide GRS80 Estas coordenadas definen impliacutecitamente el origen la escala y la orientacioacuten de los ejes coordenados X Y Z del sistema de referencia
La historia de los diferentes ITRF comenzoacute en 1984 y a partir de ahiacute se han obtenido las soluciones 88 89 90 91 92 93 94 96 97 2000 2005 y recientemente la 2008 estas soluciones difieren unas de otras debido a la incorporacioacuten constante de nuevas estaciones nuevas observaciones en las estaciones ya existentes mejora en la precisioacuten de las mismas o nuevos meacutetodos de procesamiento
Figura 12 Sistema geodeacutesico local
Geoide
Elipsoide
X
Y
Z
X
Y
Zo
XoYo
a
b
o
PNbull
bull
(ξ η)
15
Cada una de las teacutecnicas (GPS VLBI LLR SLR o DORIS) genera su propio marco de referencia k con coordenadas y velocidades conocidas para cada estacioacuten i en cada eacutepoca ts de observacioacuten por lo tanto las soluciones de las teacutecnicas se deben
combinar para estimar las posiciones y velocidades en el marco ITRF ( iITRFX y
i
ITRFXbull
) en una eacutepoca de referencia t0 para cada estacioacuten i asiacute como los paraacutemetros de transformacioacuten (factor de escala Dk vector de traslaciones Tk en X Y Z y matriz de
rotaciones Rk sobre los ejes X YZ) y sus variaciones ( KDbull
KTbull
KRbull
) entre el marco ITRF (marco final combinacioacuten de todos los k) y el correspondiente k paraacutemetros que a su vez pueden estar referidos a un eacutepoca tK diferente de las anteriores La combinacioacuten general se ajusta a las ecuaciones
( ) ( )( )
01
i i i i i i i i iks ITRF s ITRF k k ITRF k ITRF s k k ITRF k ITRF
i i i is ITRF k k ITRF k ITRF
X X t t X T D X R X t t T D X R X
X X T D X R X
bull bull bull bull
bull bull bull bull bull
= + minus + + + + minus + +
= + + + La segunda ecuacioacuten se obtiene a partir de derivar la primera y considerar que las derivadas segundas son nulas (aceleracioacuten nula) y que la derivada de i
ITRFX (sobre 10 centiacutemetros por antildeo como media) multiplicada por DK o RK (que son del orden de 10-5) tambieacuten se pueden despreciar Este sistema de ecuaciones es vaacutelido para
bull Observaciones bajo la forma de serie temporal de coordenadas (por ejemplo soluciones semanales para cada estacioacuten y por tanto en su correspondiente eacutepoca ts para una determinada teacutecnica espacial) por lo que la segunda ecuacioacuten (velocidad) del sistema (1) no se utiliza y donde la solucioacuten no es maacutes que la acumulacioacuten de eacutepocas de observacioacuten
bull Observaciones bajo la forma de paraacutemetros globales (coordenadas y
velocidades) vaacutelidos para un intervalo de tiempo elevado (varios antildeos) y
Figura 13 Estaciones que forman el ITRF2000 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
16
centrado en una eacutepoca tk (que puede coincidir o no con la t0 para cada una de las teacutecnicas espaciales)
La conexioacuten entre las diferentes teacutecnicas de observacioacuten se realiza en aquellas estaciones (collocation sites) que posean dos o maacutes teacutecnicas de observacioacuten y sea posible la determinacioacuten precisa (plusmn4-5 mm de error) de los incrementos de coordenadas X Y Z (local ties) entre los instrumentos de medida (receptores GPS o DORIS telescopios y radiotelescopios) utilizando mediciones topograacuteficas o con GPS En cada una de estas estaciones se genera una solucioacuten maacutes de acuerdo con las ecuaciones (1) teniendo en cuenta los incrementos de coordenadas es decir si una estacioacuten posee instrumental VLBI y SLR y se han medido las diferencias entre los dos instrumentos de forma precisa (incrementos de X Y Z) se genera una ecuacioacuten del tipo (1) para la solucioacuten VLBI otra para la SLR y otra con los incrementos observados (por ejemplo la solucioacuten VLBI maacutes los incrementos de manera que se estaacuten dando coordenadas en el marco VLBI a la estacioacuten SLR) El establecimiento de un marco de referencia de precisioacuten no es tarea sencilla ya que la Tierra sufre deformaciones debido a su caraacutecter elaacutestico y las precisiones de las observaciones son cada vez mayores por lo que las observaciones deben ser corregidas por los efectos de
bull Mareas terrestres bull Carga atmosfeacuterica y oceaacutenica
bull Tectoacutenica de placas El modelo utilizado hasta el ITRF2005 (incluido) es el
NNR-NUVEL-1A basado en que no existen rotaciones sobre el manto de las placas tectoacutenicas y por tanto la suma de las velocidades de las placas sobre toda la Tierra es cero Para el ITRF2008 se utiliza un modelo basado en las propias velocidades de las estaciones ITRF observadas con teacutecnicas espaciales el APKIM2005 (las velocidades presentan tambieacuten error ya que se obtienen a partir de caacutelculos)
bull Movimientos locales y regionales Un ejemplo seriacutea el rebote postglacial de
Escandinavia
Por tanto y tal como se pude ver en la tabla 3 el ITRF es un marco dinaacutemico que cambia de acuerdo a las variaciones temporales de las coordenadas y velocidades debido a los efectos anteriores
251- ITRF2000 ITRF2005 e ITRF2008
El marco ITRF2000 estaacute basado en 800 determinaciones en cerca de 500 sitios figura 13 estaacute referido a la eacutepoca 19970 (t0=19970) quedando determinado a partir de soluciones globales para cada marco k en una eacutepoca de referencia tk Para resolver el sistema de ecuaciones (1) es necesario fijar el datum de alguna manera el datum de la solucioacuten ITRF2000 quedoacute definido de la siguiente manera
bull Escala Media ponderada de determinadas medidas VLBI y SLR de alta
precisioacuten Esto se materializa fijando a cero el valor de escala y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 y las estaciones seleccionadas
bull Oriacutegen Media ponderada de determinaciones SLR (el centro de la oacuterbita de los
sateacutelites corresponderaacute al geocentro terrestre) Esto se materializa fijando a cero el valor del vector de traslacioacuten y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 las estaciones seleccionadas
17
bull Orientacioacuten Seleccioacuten de determinadas estaciones ITRF (sus coordenadas y velocidades) de alta calidad geodeacutesica que cumpla con los siguientes criterios
1 Que posea observaciones continuas al menos de los 3 uacuteltimos antildeos 2 Localizado en plataforma riacutegida y lejos de zonas de deformacioacuten 3 Que se haya determinado la velocidad con una precisioacuten mejor a
3mmantildeo 4 Que la velocidad sea menor a 3mmantildeo
Basado en estos criterios las 54 estaciones seleccionadas se pueden ver en la figura 14 como puntos azules En el sistema de ecuaciones (1) se introduce una ecuacioacuten de condicioacuten de forma que para estos puntos seleccionados exista correspondencia entre la orientacioacuten del marco de referencia y la del marco de referencia anterior (ITRF19970 por lo que no seraacuten maacutes que las definidas en la orientacioacuten BIH para 19840) La variacioacuten en la orientacioacuten (variacioacuten de estas coordenadas) seraacute la del modelo NNR-NUVEL-1A
El marco ITRF2005 referido a la eacutepoca 20000 (t0=20000) se ha basado
uacutenicamente en determinaciones SLR VLBI DORIS y GPS en 608 estaciones situadas en 338 localizaciones diferentes figura 15 quedando definido a partir de series temporales continuas de observaciones (soluciones semanales para GPS entre 1996 y 2005 DORIS entre 1993 y 2005 y SLR entre 1993 y 2005 y sesiones diarias para VLBI entre 1981 y 2005) de esta manera se puede realizar un anaacutelisis maacutes riguroso de las observaciones y detectar aquellas que presenten error o discontinuidades en las series Cada eacutepoca genera sistema de ecuaciones (1) para cada teacutecnica y en caso de que una estacioacuten presente una discontinuidad en la serie una nueva posicioacuten y velocidad se deben calcular para esa estacioacuten por lo que las coordenadas y velocidades calculadas lo seraacuten para un cierto intervalo de tiempo El datum se define de la siguiente manera
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20000) y variacioacuten nula
de estos paraacutemetros entre ITRF2005 y las series SLR bull Escala Factor de escala nulo (para la eacutepoca 20000) y variacioacuten nula entre
ITRF2005 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20000) y variaciones nulas entre ITRF2005 y ITRF2000 (en las estaciones ITRF seleccionadas)
Figura 14 En azul se muestran los 54 puntos de la ITRF que cumplen con los 4 criterios y en rojo los que cumplen con los criterios 1 3 y 4
18
En la tabla 1 se pueden ver los paraacutemetros de transformacioacuten entre el marco ITRF2005 y el ITRF2000 usando 70 estaciones especiacuteficas para su caacutelculo (las mismas que las utilizadas para orientar el ITRF2005 al ITRF2000 por lo que no existen paraacutemetros de rotacioacuten en esta transformacioacuten) Los resultados muestran las traslaciones del geocentro en miliacutemetros y el factor de escala en partes por billoacuten (con la notacioacuten americana es decir 10-9) asiacute como sus variaciones temporales (miliacutemetrosantildeo y ppbantildeo) Los resultados de la transformacioacuten muestran una variacioacuten temporal de 18 miliacutemetros por antildeo entre ITRF2005 e ITRF2000 esta velocidad de movimiento del geocentro no genera la estabilidad deseada del marco de referencia por lo que este marco se debe cambiar raacutepidamente Se cree que este movimiento se debe a la reduccioacuten de estaciones SLR con el tiempo asiacute como a su mala distribucioacuten geograacutefica (muchas maacutes en el hemisferio Norte que en el Sur) asiacute como la utilizacioacuten de diferentes modelos de procesamiento SLR para la solucioacuten ITRF2005 y la ITRF2000
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) 01 -08 -58 040 -02 01 -18 008
En base a esta uacuteltima conclusioacuten el marco ITRF2008 referido a la eacutepoca 20050 (t0=20050) se basa en el reprocesamiento de todas las series de observaciones de las cuatro teacutecnicas espaciales utilizadas (VLBI entre 1980 y 2009 GPSGNSS entre 1997 y 2009 SLR entre 1983 y 2009 DORIS entre 1993 y 2009) de manera que utilicen estaacutendares actuales e ideacutenticos y el mismo software para la reduccioacuten modelizacioacuten y correccioacuten de observaciones (modelos de troposfera e ionosfera centros de fase de emisioacuten de los sateacutelites y receptores etc) De esta manera el marco ITRF conservaraacute su definicioacuten a lo largo del tiempo en cuanto a origen escala y orientacioacuten (se produciraacuten series temporales de observaciones homogeacuteneas) por lo que los estudios de deformacioacuten dinaacutemica terrestre saldraacuten beneficiados (por ejemplo es esencial para el estudio del nivel medio del mar y su variacioacuten global y regional que el marco de referencia se defina siempre igual) 608 estaciones situadas en 338 localizaciones diferentes constituyen el marco El datum ITRF2008 se define de la siguiente manera
Figura 15 Estaciones que forman el ITRF2005 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
Tabla 1 Paraacutemetros de transformacioacuten entre los marcos ITRF2005 e ITRF2000 los paraacutemetros de rotacioacuten y sus variaciones son cero
19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

12
geoceacutentrico terrestre convencional Los valores de esta correccioacuten rondan los 01 segundos
24- Sistemas de referencia geodeacutesicos
241- Sistemas de referencia geodeacutesicos globales GRS80 y WGS84
Se definiraacute daacutetum como el conjunto de paraacutemetros que definen la posicioacuten de
un elipsoide respecto a la tierra Para determinarlo hace falta conocer la geometriacutea del elipsoide a y f su posicioacuten respecto al geocentro ∆X ∆Y ∆Z (coordenadas del centro del elipsoide respecto al geocentro) su orientacioacuten R1 R2 R3 (orientacioacuten de los ejes del elipsoide respecto a los terrestres) y la escala k
Si ∆X = ∆Y = ∆Z = 0 el daacutetum Geodeacutesico se llama Global o absoluto El Geodetic Reference System 1980 (GRS80) adoptado por la IUGG
(International Union of Geodesy and Geophysics) por su asamblea general de Camberra en 1979 pertenece a este grupo
Este sistema reemplaza al GRS67 por no representar adecuadamente el
tamantildeo forma y el campo gravitatorio con precisioacuten suficiente para la mayoriacutea de aplicaciones geodeacutesicas geofiacutesicas astronoacutemicas e hidrograacuteficas
Los principales paraacutemetros del sistema son
a = 6378137 m (Obtenido a partir de medidas SLR y Doppler) J2 = 10826310-8 (Obtenido a partir de perturbaciones en la oacuterbita de sateacutelites) GM = 3986005108 m3sg2 (Obtenido a partir de SLR LLR y pruebas espaciales) ω = 729311510-11 rdsg (Obtenido a partir de medidas astronoacutemicas) La orientacioacuten del eje Z seraacute la definida por el polo CIO como eje X el meridiano 0 definido por la BIH y el eje Y formando la tripleta dextroacutegira Este sistema sigue en vigor y no se ha actualizado en su definicioacuten ya que se debe tener en cuenta que por debajo del metro en la diferencia de paraacutemetros no existe una diferencia praacutectica en la determinacioacuten de coordenadas Asiacute las mejoras del mismo se consideran avances cientiacuteficos pero el estaacutendar (GRS80) no se debe cambiar
Cuando la informacioacuten sobre el datum se obtiene a partir de posiciones dentro de la oacuterbita de los sateacutelites (determinacioacuten dinaacutemica del sistema) los coeficientes del potencial gravitatorio (J2) asiacute como algunas constantes (ω velocidad de la luz constante gravitatoria geoceacutentrica) forman parte de la definicioacuten del datum ya que se calculan todas juntas
Un ejemplo de eacuteste uacuteltimo grupo es el World Geodetic System 1984 (WGS84)
utilizado por la teacutecnica GPS y obtenido exclusivamente a partir de los datos de la constelacioacuten de sateacutelites GPS
Los valores de sus principales paraacutemetros son
a = 6378137 m
J2 = 108262998310-8
GM = 3986004418108 m3sg2
13
ω = 729311510-11 rdsg
1f = 298257223563
El World Geodetic System 1984 (WGS84) utiliza como eje Z el polo IERS como eje X el meridiano 0 definido por el IERS y el eje Y formando la tripleta dextroacutegira Su origen coincide con el geocentro
A nivel praacutectico tal como se puede deducir el GRS80 y el WGS84 se pueden
considerar ideacutenticos 242- Sistemas de referencia geodeacutesicos locales ED50 Si ∆X ne ∆Y ne∆Z ne 0 nos encontramos ante un datum local El marco local queda definido por siete paraacutemetros (o mejor dicho 6 maacutes una condicioacuten) valores para a y f (geometriacutea del elipsoide) valores de las desviaciones de la vertical (ξ η) y de la ondulacioacuten del geoide (distancia entre el elipsoide de referencia y el geoide) con estos tres paraacutemetros se obtiene la orientacioacuten del elipsoide el acimut geodeacutesico de una liacutenea y como condicioacuten que el semieje menor del elipsoide y el eje medio de rotacioacuten terrestre sean paralelos Ademaacutes se intenta que el elipsoide se ajuste lo maacuteximo posible a la zona a cartografiar de manera que la reduccioacuten de observaciones sea lo maacutes sencilla posible Un ejemplo de este tipo de sistemas es el ED-50 (European Datum de 1950) sistema al que estaacute referida toda la cartografiacutea espantildeola Este sistema adoptoacute el elipsoide de Hayford o Internacional introducido por la IUGG en su asamblea general de 1924 en Madrid donde a y f fueron obtenidas a partir de mediciones astronoacutemicas y geodeacutesicas en los Estados Unidos a = 6378388 f = 1297 Como punto fundamental se adoptoacute Potsdam lugar donde la desviacioacuten de la vertical (diferencia angular entre la vertical geodeacutesica y astronoacutemica) y la ondulacioacuten del geoide son conocidas (ξ = 3rdquo36 η = 1rdquo78 N = 0) de manera que el elipsoide queda orientado respecto a la Tierra Cabe destacar que fijar los valores de la desviacioacuten de la vertical (ξ η) y el valor de la ondulacioacuten del geoide N en el punto fundamental para orientar el elipsoide es equivalente a fijarlo a partir de las coordenadas X Y Z de su centro respecto al geocentro figura 12 La exactitud de ED50 oscila entre unos pocos metros en el centro de Europa a maacutes de 10 en el sur aunque su precisioacuten relativa es mucho mayor y maacutes que suficiente para los levantamientos cartograacuteficos de pequentildeas y medianas escalas por lo que en 1968 el Servicio Geograacutefico del ejeacutercito lo adopta para su cartografiacutea baacutesica 150000 e igualmente el IGN en 1979
14
25- Marco de referencia terrestre internacional (ITRF) El sistema de referencia terrestre internacional convencional se materializa a traveacutes de las coordenadas de una serie de estaciones distribuidas por todo el mundo en ese sistema de referencia constituyendo el ITRF (Internacional Terrestrial Reference Frame) establecido y mantenido por la IERS Baacutesicamente el sistema que materializa se define como geoceacutentrico (incluyendo la atmoacutesfera y los oceacuteanos) la base para la escala la constituye el metro (en el sistema Internacional) y con orientacioacuten de sus ejes tal como establecioacute la BIH en 1984
bull Eje Z Polo medio determinado por la IERS y llamado IERS Reference Pole (IRP) o Convencional Terrestrial Pole (CTP)
bull Eje X Meridiano de Greenwich Convencional determinado por la IERS y
llamado IERS Reference Meridian (IRM) o Greenwich Mean Origin (GMO)
bull Eje Y Formando una tripleta dextroacutegira con los ejes anteriores sobre el
plano del ecuador convencional El marco estaacute formado por coordenadas cartesianas y velocidades de una serie
de estaciones equipadas con teacutecnicas de observacioacuten espacial (VLBI SLR LLR GPS desde 1991 y DORIS desde 1994) en la figura 13 se pueden ver las estaciones para el ITRF2000 Si se desean coordenadas geodeacutesicas se recomienda el uso del elipsoide GRS80 Estas coordenadas definen impliacutecitamente el origen la escala y la orientacioacuten de los ejes coordenados X Y Z del sistema de referencia
La historia de los diferentes ITRF comenzoacute en 1984 y a partir de ahiacute se han obtenido las soluciones 88 89 90 91 92 93 94 96 97 2000 2005 y recientemente la 2008 estas soluciones difieren unas de otras debido a la incorporacioacuten constante de nuevas estaciones nuevas observaciones en las estaciones ya existentes mejora en la precisioacuten de las mismas o nuevos meacutetodos de procesamiento
Figura 12 Sistema geodeacutesico local
Geoide
Elipsoide
X
Y
Z
X
Y
Zo
XoYo
a
b
o
PNbull
bull
(ξ η)
15
Cada una de las teacutecnicas (GPS VLBI LLR SLR o DORIS) genera su propio marco de referencia k con coordenadas y velocidades conocidas para cada estacioacuten i en cada eacutepoca ts de observacioacuten por lo tanto las soluciones de las teacutecnicas se deben
combinar para estimar las posiciones y velocidades en el marco ITRF ( iITRFX y
i
ITRFXbull
) en una eacutepoca de referencia t0 para cada estacioacuten i asiacute como los paraacutemetros de transformacioacuten (factor de escala Dk vector de traslaciones Tk en X Y Z y matriz de
rotaciones Rk sobre los ejes X YZ) y sus variaciones ( KDbull
KTbull
KRbull
) entre el marco ITRF (marco final combinacioacuten de todos los k) y el correspondiente k paraacutemetros que a su vez pueden estar referidos a un eacutepoca tK diferente de las anteriores La combinacioacuten general se ajusta a las ecuaciones
( ) ( )( )
01
i i i i i i i i iks ITRF s ITRF k k ITRF k ITRF s k k ITRF k ITRF
i i i is ITRF k k ITRF k ITRF
X X t t X T D X R X t t T D X R X
X X T D X R X
bull bull bull bull
bull bull bull bull bull
= + minus + + + + minus + +
= + + + La segunda ecuacioacuten se obtiene a partir de derivar la primera y considerar que las derivadas segundas son nulas (aceleracioacuten nula) y que la derivada de i
ITRFX (sobre 10 centiacutemetros por antildeo como media) multiplicada por DK o RK (que son del orden de 10-5) tambieacuten se pueden despreciar Este sistema de ecuaciones es vaacutelido para
bull Observaciones bajo la forma de serie temporal de coordenadas (por ejemplo soluciones semanales para cada estacioacuten y por tanto en su correspondiente eacutepoca ts para una determinada teacutecnica espacial) por lo que la segunda ecuacioacuten (velocidad) del sistema (1) no se utiliza y donde la solucioacuten no es maacutes que la acumulacioacuten de eacutepocas de observacioacuten
bull Observaciones bajo la forma de paraacutemetros globales (coordenadas y
velocidades) vaacutelidos para un intervalo de tiempo elevado (varios antildeos) y
Figura 13 Estaciones que forman el ITRF2000 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
16
centrado en una eacutepoca tk (que puede coincidir o no con la t0 para cada una de las teacutecnicas espaciales)
La conexioacuten entre las diferentes teacutecnicas de observacioacuten se realiza en aquellas estaciones (collocation sites) que posean dos o maacutes teacutecnicas de observacioacuten y sea posible la determinacioacuten precisa (plusmn4-5 mm de error) de los incrementos de coordenadas X Y Z (local ties) entre los instrumentos de medida (receptores GPS o DORIS telescopios y radiotelescopios) utilizando mediciones topograacuteficas o con GPS En cada una de estas estaciones se genera una solucioacuten maacutes de acuerdo con las ecuaciones (1) teniendo en cuenta los incrementos de coordenadas es decir si una estacioacuten posee instrumental VLBI y SLR y se han medido las diferencias entre los dos instrumentos de forma precisa (incrementos de X Y Z) se genera una ecuacioacuten del tipo (1) para la solucioacuten VLBI otra para la SLR y otra con los incrementos observados (por ejemplo la solucioacuten VLBI maacutes los incrementos de manera que se estaacuten dando coordenadas en el marco VLBI a la estacioacuten SLR) El establecimiento de un marco de referencia de precisioacuten no es tarea sencilla ya que la Tierra sufre deformaciones debido a su caraacutecter elaacutestico y las precisiones de las observaciones son cada vez mayores por lo que las observaciones deben ser corregidas por los efectos de
bull Mareas terrestres bull Carga atmosfeacuterica y oceaacutenica
bull Tectoacutenica de placas El modelo utilizado hasta el ITRF2005 (incluido) es el
NNR-NUVEL-1A basado en que no existen rotaciones sobre el manto de las placas tectoacutenicas y por tanto la suma de las velocidades de las placas sobre toda la Tierra es cero Para el ITRF2008 se utiliza un modelo basado en las propias velocidades de las estaciones ITRF observadas con teacutecnicas espaciales el APKIM2005 (las velocidades presentan tambieacuten error ya que se obtienen a partir de caacutelculos)
bull Movimientos locales y regionales Un ejemplo seriacutea el rebote postglacial de
Escandinavia
Por tanto y tal como se pude ver en la tabla 3 el ITRF es un marco dinaacutemico que cambia de acuerdo a las variaciones temporales de las coordenadas y velocidades debido a los efectos anteriores
251- ITRF2000 ITRF2005 e ITRF2008
El marco ITRF2000 estaacute basado en 800 determinaciones en cerca de 500 sitios figura 13 estaacute referido a la eacutepoca 19970 (t0=19970) quedando determinado a partir de soluciones globales para cada marco k en una eacutepoca de referencia tk Para resolver el sistema de ecuaciones (1) es necesario fijar el datum de alguna manera el datum de la solucioacuten ITRF2000 quedoacute definido de la siguiente manera
bull Escala Media ponderada de determinadas medidas VLBI y SLR de alta
precisioacuten Esto se materializa fijando a cero el valor de escala y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 y las estaciones seleccionadas
bull Oriacutegen Media ponderada de determinaciones SLR (el centro de la oacuterbita de los
sateacutelites corresponderaacute al geocentro terrestre) Esto se materializa fijando a cero el valor del vector de traslacioacuten y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 las estaciones seleccionadas
17
bull Orientacioacuten Seleccioacuten de determinadas estaciones ITRF (sus coordenadas y velocidades) de alta calidad geodeacutesica que cumpla con los siguientes criterios
1 Que posea observaciones continuas al menos de los 3 uacuteltimos antildeos 2 Localizado en plataforma riacutegida y lejos de zonas de deformacioacuten 3 Que se haya determinado la velocidad con una precisioacuten mejor a
3mmantildeo 4 Que la velocidad sea menor a 3mmantildeo
Basado en estos criterios las 54 estaciones seleccionadas se pueden ver en la figura 14 como puntos azules En el sistema de ecuaciones (1) se introduce una ecuacioacuten de condicioacuten de forma que para estos puntos seleccionados exista correspondencia entre la orientacioacuten del marco de referencia y la del marco de referencia anterior (ITRF19970 por lo que no seraacuten maacutes que las definidas en la orientacioacuten BIH para 19840) La variacioacuten en la orientacioacuten (variacioacuten de estas coordenadas) seraacute la del modelo NNR-NUVEL-1A
El marco ITRF2005 referido a la eacutepoca 20000 (t0=20000) se ha basado
uacutenicamente en determinaciones SLR VLBI DORIS y GPS en 608 estaciones situadas en 338 localizaciones diferentes figura 15 quedando definido a partir de series temporales continuas de observaciones (soluciones semanales para GPS entre 1996 y 2005 DORIS entre 1993 y 2005 y SLR entre 1993 y 2005 y sesiones diarias para VLBI entre 1981 y 2005) de esta manera se puede realizar un anaacutelisis maacutes riguroso de las observaciones y detectar aquellas que presenten error o discontinuidades en las series Cada eacutepoca genera sistema de ecuaciones (1) para cada teacutecnica y en caso de que una estacioacuten presente una discontinuidad en la serie una nueva posicioacuten y velocidad se deben calcular para esa estacioacuten por lo que las coordenadas y velocidades calculadas lo seraacuten para un cierto intervalo de tiempo El datum se define de la siguiente manera
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20000) y variacioacuten nula
de estos paraacutemetros entre ITRF2005 y las series SLR bull Escala Factor de escala nulo (para la eacutepoca 20000) y variacioacuten nula entre
ITRF2005 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20000) y variaciones nulas entre ITRF2005 y ITRF2000 (en las estaciones ITRF seleccionadas)
Figura 14 En azul se muestran los 54 puntos de la ITRF que cumplen con los 4 criterios y en rojo los que cumplen con los criterios 1 3 y 4
18
En la tabla 1 se pueden ver los paraacutemetros de transformacioacuten entre el marco ITRF2005 y el ITRF2000 usando 70 estaciones especiacuteficas para su caacutelculo (las mismas que las utilizadas para orientar el ITRF2005 al ITRF2000 por lo que no existen paraacutemetros de rotacioacuten en esta transformacioacuten) Los resultados muestran las traslaciones del geocentro en miliacutemetros y el factor de escala en partes por billoacuten (con la notacioacuten americana es decir 10-9) asiacute como sus variaciones temporales (miliacutemetrosantildeo y ppbantildeo) Los resultados de la transformacioacuten muestran una variacioacuten temporal de 18 miliacutemetros por antildeo entre ITRF2005 e ITRF2000 esta velocidad de movimiento del geocentro no genera la estabilidad deseada del marco de referencia por lo que este marco se debe cambiar raacutepidamente Se cree que este movimiento se debe a la reduccioacuten de estaciones SLR con el tiempo asiacute como a su mala distribucioacuten geograacutefica (muchas maacutes en el hemisferio Norte que en el Sur) asiacute como la utilizacioacuten de diferentes modelos de procesamiento SLR para la solucioacuten ITRF2005 y la ITRF2000
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) 01 -08 -58 040 -02 01 -18 008
En base a esta uacuteltima conclusioacuten el marco ITRF2008 referido a la eacutepoca 20050 (t0=20050) se basa en el reprocesamiento de todas las series de observaciones de las cuatro teacutecnicas espaciales utilizadas (VLBI entre 1980 y 2009 GPSGNSS entre 1997 y 2009 SLR entre 1983 y 2009 DORIS entre 1993 y 2009) de manera que utilicen estaacutendares actuales e ideacutenticos y el mismo software para la reduccioacuten modelizacioacuten y correccioacuten de observaciones (modelos de troposfera e ionosfera centros de fase de emisioacuten de los sateacutelites y receptores etc) De esta manera el marco ITRF conservaraacute su definicioacuten a lo largo del tiempo en cuanto a origen escala y orientacioacuten (se produciraacuten series temporales de observaciones homogeacuteneas) por lo que los estudios de deformacioacuten dinaacutemica terrestre saldraacuten beneficiados (por ejemplo es esencial para el estudio del nivel medio del mar y su variacioacuten global y regional que el marco de referencia se defina siempre igual) 608 estaciones situadas en 338 localizaciones diferentes constituyen el marco El datum ITRF2008 se define de la siguiente manera
Figura 15 Estaciones que forman el ITRF2005 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
Tabla 1 Paraacutemetros de transformacioacuten entre los marcos ITRF2005 e ITRF2000 los paraacutemetros de rotacioacuten y sus variaciones son cero
19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

13
ω = 729311510-11 rdsg
1f = 298257223563
El World Geodetic System 1984 (WGS84) utiliza como eje Z el polo IERS como eje X el meridiano 0 definido por el IERS y el eje Y formando la tripleta dextroacutegira Su origen coincide con el geocentro
A nivel praacutectico tal como se puede deducir el GRS80 y el WGS84 se pueden
considerar ideacutenticos 242- Sistemas de referencia geodeacutesicos locales ED50 Si ∆X ne ∆Y ne∆Z ne 0 nos encontramos ante un datum local El marco local queda definido por siete paraacutemetros (o mejor dicho 6 maacutes una condicioacuten) valores para a y f (geometriacutea del elipsoide) valores de las desviaciones de la vertical (ξ η) y de la ondulacioacuten del geoide (distancia entre el elipsoide de referencia y el geoide) con estos tres paraacutemetros se obtiene la orientacioacuten del elipsoide el acimut geodeacutesico de una liacutenea y como condicioacuten que el semieje menor del elipsoide y el eje medio de rotacioacuten terrestre sean paralelos Ademaacutes se intenta que el elipsoide se ajuste lo maacuteximo posible a la zona a cartografiar de manera que la reduccioacuten de observaciones sea lo maacutes sencilla posible Un ejemplo de este tipo de sistemas es el ED-50 (European Datum de 1950) sistema al que estaacute referida toda la cartografiacutea espantildeola Este sistema adoptoacute el elipsoide de Hayford o Internacional introducido por la IUGG en su asamblea general de 1924 en Madrid donde a y f fueron obtenidas a partir de mediciones astronoacutemicas y geodeacutesicas en los Estados Unidos a = 6378388 f = 1297 Como punto fundamental se adoptoacute Potsdam lugar donde la desviacioacuten de la vertical (diferencia angular entre la vertical geodeacutesica y astronoacutemica) y la ondulacioacuten del geoide son conocidas (ξ = 3rdquo36 η = 1rdquo78 N = 0) de manera que el elipsoide queda orientado respecto a la Tierra Cabe destacar que fijar los valores de la desviacioacuten de la vertical (ξ η) y el valor de la ondulacioacuten del geoide N en el punto fundamental para orientar el elipsoide es equivalente a fijarlo a partir de las coordenadas X Y Z de su centro respecto al geocentro figura 12 La exactitud de ED50 oscila entre unos pocos metros en el centro de Europa a maacutes de 10 en el sur aunque su precisioacuten relativa es mucho mayor y maacutes que suficiente para los levantamientos cartograacuteficos de pequentildeas y medianas escalas por lo que en 1968 el Servicio Geograacutefico del ejeacutercito lo adopta para su cartografiacutea baacutesica 150000 e igualmente el IGN en 1979
14
25- Marco de referencia terrestre internacional (ITRF) El sistema de referencia terrestre internacional convencional se materializa a traveacutes de las coordenadas de una serie de estaciones distribuidas por todo el mundo en ese sistema de referencia constituyendo el ITRF (Internacional Terrestrial Reference Frame) establecido y mantenido por la IERS Baacutesicamente el sistema que materializa se define como geoceacutentrico (incluyendo la atmoacutesfera y los oceacuteanos) la base para la escala la constituye el metro (en el sistema Internacional) y con orientacioacuten de sus ejes tal como establecioacute la BIH en 1984
bull Eje Z Polo medio determinado por la IERS y llamado IERS Reference Pole (IRP) o Convencional Terrestrial Pole (CTP)
bull Eje X Meridiano de Greenwich Convencional determinado por la IERS y
llamado IERS Reference Meridian (IRM) o Greenwich Mean Origin (GMO)
bull Eje Y Formando una tripleta dextroacutegira con los ejes anteriores sobre el
plano del ecuador convencional El marco estaacute formado por coordenadas cartesianas y velocidades de una serie
de estaciones equipadas con teacutecnicas de observacioacuten espacial (VLBI SLR LLR GPS desde 1991 y DORIS desde 1994) en la figura 13 se pueden ver las estaciones para el ITRF2000 Si se desean coordenadas geodeacutesicas se recomienda el uso del elipsoide GRS80 Estas coordenadas definen impliacutecitamente el origen la escala y la orientacioacuten de los ejes coordenados X Y Z del sistema de referencia
La historia de los diferentes ITRF comenzoacute en 1984 y a partir de ahiacute se han obtenido las soluciones 88 89 90 91 92 93 94 96 97 2000 2005 y recientemente la 2008 estas soluciones difieren unas de otras debido a la incorporacioacuten constante de nuevas estaciones nuevas observaciones en las estaciones ya existentes mejora en la precisioacuten de las mismas o nuevos meacutetodos de procesamiento
Figura 12 Sistema geodeacutesico local
Geoide
Elipsoide
X
Y
Z
X
Y
Zo
XoYo
a
b
o
PNbull
bull
(ξ η)
15
Cada una de las teacutecnicas (GPS VLBI LLR SLR o DORIS) genera su propio marco de referencia k con coordenadas y velocidades conocidas para cada estacioacuten i en cada eacutepoca ts de observacioacuten por lo tanto las soluciones de las teacutecnicas se deben
combinar para estimar las posiciones y velocidades en el marco ITRF ( iITRFX y
i
ITRFXbull
) en una eacutepoca de referencia t0 para cada estacioacuten i asiacute como los paraacutemetros de transformacioacuten (factor de escala Dk vector de traslaciones Tk en X Y Z y matriz de
rotaciones Rk sobre los ejes X YZ) y sus variaciones ( KDbull
KTbull
KRbull
) entre el marco ITRF (marco final combinacioacuten de todos los k) y el correspondiente k paraacutemetros que a su vez pueden estar referidos a un eacutepoca tK diferente de las anteriores La combinacioacuten general se ajusta a las ecuaciones
( ) ( )( )
01
i i i i i i i i iks ITRF s ITRF k k ITRF k ITRF s k k ITRF k ITRF
i i i is ITRF k k ITRF k ITRF
X X t t X T D X R X t t T D X R X
X X T D X R X
bull bull bull bull
bull bull bull bull bull
= + minus + + + + minus + +
= + + + La segunda ecuacioacuten se obtiene a partir de derivar la primera y considerar que las derivadas segundas son nulas (aceleracioacuten nula) y que la derivada de i
ITRFX (sobre 10 centiacutemetros por antildeo como media) multiplicada por DK o RK (que son del orden de 10-5) tambieacuten se pueden despreciar Este sistema de ecuaciones es vaacutelido para
bull Observaciones bajo la forma de serie temporal de coordenadas (por ejemplo soluciones semanales para cada estacioacuten y por tanto en su correspondiente eacutepoca ts para una determinada teacutecnica espacial) por lo que la segunda ecuacioacuten (velocidad) del sistema (1) no se utiliza y donde la solucioacuten no es maacutes que la acumulacioacuten de eacutepocas de observacioacuten
bull Observaciones bajo la forma de paraacutemetros globales (coordenadas y
velocidades) vaacutelidos para un intervalo de tiempo elevado (varios antildeos) y
Figura 13 Estaciones que forman el ITRF2000 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
16
centrado en una eacutepoca tk (que puede coincidir o no con la t0 para cada una de las teacutecnicas espaciales)
La conexioacuten entre las diferentes teacutecnicas de observacioacuten se realiza en aquellas estaciones (collocation sites) que posean dos o maacutes teacutecnicas de observacioacuten y sea posible la determinacioacuten precisa (plusmn4-5 mm de error) de los incrementos de coordenadas X Y Z (local ties) entre los instrumentos de medida (receptores GPS o DORIS telescopios y radiotelescopios) utilizando mediciones topograacuteficas o con GPS En cada una de estas estaciones se genera una solucioacuten maacutes de acuerdo con las ecuaciones (1) teniendo en cuenta los incrementos de coordenadas es decir si una estacioacuten posee instrumental VLBI y SLR y se han medido las diferencias entre los dos instrumentos de forma precisa (incrementos de X Y Z) se genera una ecuacioacuten del tipo (1) para la solucioacuten VLBI otra para la SLR y otra con los incrementos observados (por ejemplo la solucioacuten VLBI maacutes los incrementos de manera que se estaacuten dando coordenadas en el marco VLBI a la estacioacuten SLR) El establecimiento de un marco de referencia de precisioacuten no es tarea sencilla ya que la Tierra sufre deformaciones debido a su caraacutecter elaacutestico y las precisiones de las observaciones son cada vez mayores por lo que las observaciones deben ser corregidas por los efectos de
bull Mareas terrestres bull Carga atmosfeacuterica y oceaacutenica
bull Tectoacutenica de placas El modelo utilizado hasta el ITRF2005 (incluido) es el
NNR-NUVEL-1A basado en que no existen rotaciones sobre el manto de las placas tectoacutenicas y por tanto la suma de las velocidades de las placas sobre toda la Tierra es cero Para el ITRF2008 se utiliza un modelo basado en las propias velocidades de las estaciones ITRF observadas con teacutecnicas espaciales el APKIM2005 (las velocidades presentan tambieacuten error ya que se obtienen a partir de caacutelculos)
bull Movimientos locales y regionales Un ejemplo seriacutea el rebote postglacial de
Escandinavia
Por tanto y tal como se pude ver en la tabla 3 el ITRF es un marco dinaacutemico que cambia de acuerdo a las variaciones temporales de las coordenadas y velocidades debido a los efectos anteriores
251- ITRF2000 ITRF2005 e ITRF2008
El marco ITRF2000 estaacute basado en 800 determinaciones en cerca de 500 sitios figura 13 estaacute referido a la eacutepoca 19970 (t0=19970) quedando determinado a partir de soluciones globales para cada marco k en una eacutepoca de referencia tk Para resolver el sistema de ecuaciones (1) es necesario fijar el datum de alguna manera el datum de la solucioacuten ITRF2000 quedoacute definido de la siguiente manera
bull Escala Media ponderada de determinadas medidas VLBI y SLR de alta
precisioacuten Esto se materializa fijando a cero el valor de escala y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 y las estaciones seleccionadas
bull Oriacutegen Media ponderada de determinaciones SLR (el centro de la oacuterbita de los
sateacutelites corresponderaacute al geocentro terrestre) Esto se materializa fijando a cero el valor del vector de traslacioacuten y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 las estaciones seleccionadas
17
bull Orientacioacuten Seleccioacuten de determinadas estaciones ITRF (sus coordenadas y velocidades) de alta calidad geodeacutesica que cumpla con los siguientes criterios
1 Que posea observaciones continuas al menos de los 3 uacuteltimos antildeos 2 Localizado en plataforma riacutegida y lejos de zonas de deformacioacuten 3 Que se haya determinado la velocidad con una precisioacuten mejor a
3mmantildeo 4 Que la velocidad sea menor a 3mmantildeo
Basado en estos criterios las 54 estaciones seleccionadas se pueden ver en la figura 14 como puntos azules En el sistema de ecuaciones (1) se introduce una ecuacioacuten de condicioacuten de forma que para estos puntos seleccionados exista correspondencia entre la orientacioacuten del marco de referencia y la del marco de referencia anterior (ITRF19970 por lo que no seraacuten maacutes que las definidas en la orientacioacuten BIH para 19840) La variacioacuten en la orientacioacuten (variacioacuten de estas coordenadas) seraacute la del modelo NNR-NUVEL-1A
El marco ITRF2005 referido a la eacutepoca 20000 (t0=20000) se ha basado
uacutenicamente en determinaciones SLR VLBI DORIS y GPS en 608 estaciones situadas en 338 localizaciones diferentes figura 15 quedando definido a partir de series temporales continuas de observaciones (soluciones semanales para GPS entre 1996 y 2005 DORIS entre 1993 y 2005 y SLR entre 1993 y 2005 y sesiones diarias para VLBI entre 1981 y 2005) de esta manera se puede realizar un anaacutelisis maacutes riguroso de las observaciones y detectar aquellas que presenten error o discontinuidades en las series Cada eacutepoca genera sistema de ecuaciones (1) para cada teacutecnica y en caso de que una estacioacuten presente una discontinuidad en la serie una nueva posicioacuten y velocidad se deben calcular para esa estacioacuten por lo que las coordenadas y velocidades calculadas lo seraacuten para un cierto intervalo de tiempo El datum se define de la siguiente manera
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20000) y variacioacuten nula
de estos paraacutemetros entre ITRF2005 y las series SLR bull Escala Factor de escala nulo (para la eacutepoca 20000) y variacioacuten nula entre
ITRF2005 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20000) y variaciones nulas entre ITRF2005 y ITRF2000 (en las estaciones ITRF seleccionadas)
Figura 14 En azul se muestran los 54 puntos de la ITRF que cumplen con los 4 criterios y en rojo los que cumplen con los criterios 1 3 y 4
18
En la tabla 1 se pueden ver los paraacutemetros de transformacioacuten entre el marco ITRF2005 y el ITRF2000 usando 70 estaciones especiacuteficas para su caacutelculo (las mismas que las utilizadas para orientar el ITRF2005 al ITRF2000 por lo que no existen paraacutemetros de rotacioacuten en esta transformacioacuten) Los resultados muestran las traslaciones del geocentro en miliacutemetros y el factor de escala en partes por billoacuten (con la notacioacuten americana es decir 10-9) asiacute como sus variaciones temporales (miliacutemetrosantildeo y ppbantildeo) Los resultados de la transformacioacuten muestran una variacioacuten temporal de 18 miliacutemetros por antildeo entre ITRF2005 e ITRF2000 esta velocidad de movimiento del geocentro no genera la estabilidad deseada del marco de referencia por lo que este marco se debe cambiar raacutepidamente Se cree que este movimiento se debe a la reduccioacuten de estaciones SLR con el tiempo asiacute como a su mala distribucioacuten geograacutefica (muchas maacutes en el hemisferio Norte que en el Sur) asiacute como la utilizacioacuten de diferentes modelos de procesamiento SLR para la solucioacuten ITRF2005 y la ITRF2000
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) 01 -08 -58 040 -02 01 -18 008
En base a esta uacuteltima conclusioacuten el marco ITRF2008 referido a la eacutepoca 20050 (t0=20050) se basa en el reprocesamiento de todas las series de observaciones de las cuatro teacutecnicas espaciales utilizadas (VLBI entre 1980 y 2009 GPSGNSS entre 1997 y 2009 SLR entre 1983 y 2009 DORIS entre 1993 y 2009) de manera que utilicen estaacutendares actuales e ideacutenticos y el mismo software para la reduccioacuten modelizacioacuten y correccioacuten de observaciones (modelos de troposfera e ionosfera centros de fase de emisioacuten de los sateacutelites y receptores etc) De esta manera el marco ITRF conservaraacute su definicioacuten a lo largo del tiempo en cuanto a origen escala y orientacioacuten (se produciraacuten series temporales de observaciones homogeacuteneas) por lo que los estudios de deformacioacuten dinaacutemica terrestre saldraacuten beneficiados (por ejemplo es esencial para el estudio del nivel medio del mar y su variacioacuten global y regional que el marco de referencia se defina siempre igual) 608 estaciones situadas en 338 localizaciones diferentes constituyen el marco El datum ITRF2008 se define de la siguiente manera
Figura 15 Estaciones que forman el ITRF2005 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
Tabla 1 Paraacutemetros de transformacioacuten entre los marcos ITRF2005 e ITRF2000 los paraacutemetros de rotacioacuten y sus variaciones son cero
19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

14
25- Marco de referencia terrestre internacional (ITRF) El sistema de referencia terrestre internacional convencional se materializa a traveacutes de las coordenadas de una serie de estaciones distribuidas por todo el mundo en ese sistema de referencia constituyendo el ITRF (Internacional Terrestrial Reference Frame) establecido y mantenido por la IERS Baacutesicamente el sistema que materializa se define como geoceacutentrico (incluyendo la atmoacutesfera y los oceacuteanos) la base para la escala la constituye el metro (en el sistema Internacional) y con orientacioacuten de sus ejes tal como establecioacute la BIH en 1984
bull Eje Z Polo medio determinado por la IERS y llamado IERS Reference Pole (IRP) o Convencional Terrestrial Pole (CTP)
bull Eje X Meridiano de Greenwich Convencional determinado por la IERS y
llamado IERS Reference Meridian (IRM) o Greenwich Mean Origin (GMO)
bull Eje Y Formando una tripleta dextroacutegira con los ejes anteriores sobre el
plano del ecuador convencional El marco estaacute formado por coordenadas cartesianas y velocidades de una serie
de estaciones equipadas con teacutecnicas de observacioacuten espacial (VLBI SLR LLR GPS desde 1991 y DORIS desde 1994) en la figura 13 se pueden ver las estaciones para el ITRF2000 Si se desean coordenadas geodeacutesicas se recomienda el uso del elipsoide GRS80 Estas coordenadas definen impliacutecitamente el origen la escala y la orientacioacuten de los ejes coordenados X Y Z del sistema de referencia
La historia de los diferentes ITRF comenzoacute en 1984 y a partir de ahiacute se han obtenido las soluciones 88 89 90 91 92 93 94 96 97 2000 2005 y recientemente la 2008 estas soluciones difieren unas de otras debido a la incorporacioacuten constante de nuevas estaciones nuevas observaciones en las estaciones ya existentes mejora en la precisioacuten de las mismas o nuevos meacutetodos de procesamiento
Figura 12 Sistema geodeacutesico local
Geoide
Elipsoide
X
Y
Z
X
Y
Zo
XoYo
a
b
o
PNbull
bull
(ξ η)
15
Cada una de las teacutecnicas (GPS VLBI LLR SLR o DORIS) genera su propio marco de referencia k con coordenadas y velocidades conocidas para cada estacioacuten i en cada eacutepoca ts de observacioacuten por lo tanto las soluciones de las teacutecnicas se deben
combinar para estimar las posiciones y velocidades en el marco ITRF ( iITRFX y
i
ITRFXbull
) en una eacutepoca de referencia t0 para cada estacioacuten i asiacute como los paraacutemetros de transformacioacuten (factor de escala Dk vector de traslaciones Tk en X Y Z y matriz de
rotaciones Rk sobre los ejes X YZ) y sus variaciones ( KDbull
KTbull
KRbull
) entre el marco ITRF (marco final combinacioacuten de todos los k) y el correspondiente k paraacutemetros que a su vez pueden estar referidos a un eacutepoca tK diferente de las anteriores La combinacioacuten general se ajusta a las ecuaciones
( ) ( )( )
01
i i i i i i i i iks ITRF s ITRF k k ITRF k ITRF s k k ITRF k ITRF
i i i is ITRF k k ITRF k ITRF
X X t t X T D X R X t t T D X R X
X X T D X R X
bull bull bull bull
bull bull bull bull bull
= + minus + + + + minus + +
= + + + La segunda ecuacioacuten se obtiene a partir de derivar la primera y considerar que las derivadas segundas son nulas (aceleracioacuten nula) y que la derivada de i
ITRFX (sobre 10 centiacutemetros por antildeo como media) multiplicada por DK o RK (que son del orden de 10-5) tambieacuten se pueden despreciar Este sistema de ecuaciones es vaacutelido para
bull Observaciones bajo la forma de serie temporal de coordenadas (por ejemplo soluciones semanales para cada estacioacuten y por tanto en su correspondiente eacutepoca ts para una determinada teacutecnica espacial) por lo que la segunda ecuacioacuten (velocidad) del sistema (1) no se utiliza y donde la solucioacuten no es maacutes que la acumulacioacuten de eacutepocas de observacioacuten
bull Observaciones bajo la forma de paraacutemetros globales (coordenadas y
velocidades) vaacutelidos para un intervalo de tiempo elevado (varios antildeos) y
Figura 13 Estaciones que forman el ITRF2000 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
16
centrado en una eacutepoca tk (que puede coincidir o no con la t0 para cada una de las teacutecnicas espaciales)
La conexioacuten entre las diferentes teacutecnicas de observacioacuten se realiza en aquellas estaciones (collocation sites) que posean dos o maacutes teacutecnicas de observacioacuten y sea posible la determinacioacuten precisa (plusmn4-5 mm de error) de los incrementos de coordenadas X Y Z (local ties) entre los instrumentos de medida (receptores GPS o DORIS telescopios y radiotelescopios) utilizando mediciones topograacuteficas o con GPS En cada una de estas estaciones se genera una solucioacuten maacutes de acuerdo con las ecuaciones (1) teniendo en cuenta los incrementos de coordenadas es decir si una estacioacuten posee instrumental VLBI y SLR y se han medido las diferencias entre los dos instrumentos de forma precisa (incrementos de X Y Z) se genera una ecuacioacuten del tipo (1) para la solucioacuten VLBI otra para la SLR y otra con los incrementos observados (por ejemplo la solucioacuten VLBI maacutes los incrementos de manera que se estaacuten dando coordenadas en el marco VLBI a la estacioacuten SLR) El establecimiento de un marco de referencia de precisioacuten no es tarea sencilla ya que la Tierra sufre deformaciones debido a su caraacutecter elaacutestico y las precisiones de las observaciones son cada vez mayores por lo que las observaciones deben ser corregidas por los efectos de
bull Mareas terrestres bull Carga atmosfeacuterica y oceaacutenica
bull Tectoacutenica de placas El modelo utilizado hasta el ITRF2005 (incluido) es el
NNR-NUVEL-1A basado en que no existen rotaciones sobre el manto de las placas tectoacutenicas y por tanto la suma de las velocidades de las placas sobre toda la Tierra es cero Para el ITRF2008 se utiliza un modelo basado en las propias velocidades de las estaciones ITRF observadas con teacutecnicas espaciales el APKIM2005 (las velocidades presentan tambieacuten error ya que se obtienen a partir de caacutelculos)
bull Movimientos locales y regionales Un ejemplo seriacutea el rebote postglacial de
Escandinavia
Por tanto y tal como se pude ver en la tabla 3 el ITRF es un marco dinaacutemico que cambia de acuerdo a las variaciones temporales de las coordenadas y velocidades debido a los efectos anteriores
251- ITRF2000 ITRF2005 e ITRF2008
El marco ITRF2000 estaacute basado en 800 determinaciones en cerca de 500 sitios figura 13 estaacute referido a la eacutepoca 19970 (t0=19970) quedando determinado a partir de soluciones globales para cada marco k en una eacutepoca de referencia tk Para resolver el sistema de ecuaciones (1) es necesario fijar el datum de alguna manera el datum de la solucioacuten ITRF2000 quedoacute definido de la siguiente manera
bull Escala Media ponderada de determinadas medidas VLBI y SLR de alta
precisioacuten Esto se materializa fijando a cero el valor de escala y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 y las estaciones seleccionadas
bull Oriacutegen Media ponderada de determinaciones SLR (el centro de la oacuterbita de los
sateacutelites corresponderaacute al geocentro terrestre) Esto se materializa fijando a cero el valor del vector de traslacioacuten y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 las estaciones seleccionadas
17
bull Orientacioacuten Seleccioacuten de determinadas estaciones ITRF (sus coordenadas y velocidades) de alta calidad geodeacutesica que cumpla con los siguientes criterios
1 Que posea observaciones continuas al menos de los 3 uacuteltimos antildeos 2 Localizado en plataforma riacutegida y lejos de zonas de deformacioacuten 3 Que se haya determinado la velocidad con una precisioacuten mejor a
3mmantildeo 4 Que la velocidad sea menor a 3mmantildeo
Basado en estos criterios las 54 estaciones seleccionadas se pueden ver en la figura 14 como puntos azules En el sistema de ecuaciones (1) se introduce una ecuacioacuten de condicioacuten de forma que para estos puntos seleccionados exista correspondencia entre la orientacioacuten del marco de referencia y la del marco de referencia anterior (ITRF19970 por lo que no seraacuten maacutes que las definidas en la orientacioacuten BIH para 19840) La variacioacuten en la orientacioacuten (variacioacuten de estas coordenadas) seraacute la del modelo NNR-NUVEL-1A
El marco ITRF2005 referido a la eacutepoca 20000 (t0=20000) se ha basado
uacutenicamente en determinaciones SLR VLBI DORIS y GPS en 608 estaciones situadas en 338 localizaciones diferentes figura 15 quedando definido a partir de series temporales continuas de observaciones (soluciones semanales para GPS entre 1996 y 2005 DORIS entre 1993 y 2005 y SLR entre 1993 y 2005 y sesiones diarias para VLBI entre 1981 y 2005) de esta manera se puede realizar un anaacutelisis maacutes riguroso de las observaciones y detectar aquellas que presenten error o discontinuidades en las series Cada eacutepoca genera sistema de ecuaciones (1) para cada teacutecnica y en caso de que una estacioacuten presente una discontinuidad en la serie una nueva posicioacuten y velocidad se deben calcular para esa estacioacuten por lo que las coordenadas y velocidades calculadas lo seraacuten para un cierto intervalo de tiempo El datum se define de la siguiente manera
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20000) y variacioacuten nula
de estos paraacutemetros entre ITRF2005 y las series SLR bull Escala Factor de escala nulo (para la eacutepoca 20000) y variacioacuten nula entre
ITRF2005 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20000) y variaciones nulas entre ITRF2005 y ITRF2000 (en las estaciones ITRF seleccionadas)
Figura 14 En azul se muestran los 54 puntos de la ITRF que cumplen con los 4 criterios y en rojo los que cumplen con los criterios 1 3 y 4
18
En la tabla 1 se pueden ver los paraacutemetros de transformacioacuten entre el marco ITRF2005 y el ITRF2000 usando 70 estaciones especiacuteficas para su caacutelculo (las mismas que las utilizadas para orientar el ITRF2005 al ITRF2000 por lo que no existen paraacutemetros de rotacioacuten en esta transformacioacuten) Los resultados muestran las traslaciones del geocentro en miliacutemetros y el factor de escala en partes por billoacuten (con la notacioacuten americana es decir 10-9) asiacute como sus variaciones temporales (miliacutemetrosantildeo y ppbantildeo) Los resultados de la transformacioacuten muestran una variacioacuten temporal de 18 miliacutemetros por antildeo entre ITRF2005 e ITRF2000 esta velocidad de movimiento del geocentro no genera la estabilidad deseada del marco de referencia por lo que este marco se debe cambiar raacutepidamente Se cree que este movimiento se debe a la reduccioacuten de estaciones SLR con el tiempo asiacute como a su mala distribucioacuten geograacutefica (muchas maacutes en el hemisferio Norte que en el Sur) asiacute como la utilizacioacuten de diferentes modelos de procesamiento SLR para la solucioacuten ITRF2005 y la ITRF2000
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) 01 -08 -58 040 -02 01 -18 008
En base a esta uacuteltima conclusioacuten el marco ITRF2008 referido a la eacutepoca 20050 (t0=20050) se basa en el reprocesamiento de todas las series de observaciones de las cuatro teacutecnicas espaciales utilizadas (VLBI entre 1980 y 2009 GPSGNSS entre 1997 y 2009 SLR entre 1983 y 2009 DORIS entre 1993 y 2009) de manera que utilicen estaacutendares actuales e ideacutenticos y el mismo software para la reduccioacuten modelizacioacuten y correccioacuten de observaciones (modelos de troposfera e ionosfera centros de fase de emisioacuten de los sateacutelites y receptores etc) De esta manera el marco ITRF conservaraacute su definicioacuten a lo largo del tiempo en cuanto a origen escala y orientacioacuten (se produciraacuten series temporales de observaciones homogeacuteneas) por lo que los estudios de deformacioacuten dinaacutemica terrestre saldraacuten beneficiados (por ejemplo es esencial para el estudio del nivel medio del mar y su variacioacuten global y regional que el marco de referencia se defina siempre igual) 608 estaciones situadas en 338 localizaciones diferentes constituyen el marco El datum ITRF2008 se define de la siguiente manera
Figura 15 Estaciones que forman el ITRF2005 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
Tabla 1 Paraacutemetros de transformacioacuten entre los marcos ITRF2005 e ITRF2000 los paraacutemetros de rotacioacuten y sus variaciones son cero
19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

15
Cada una de las teacutecnicas (GPS VLBI LLR SLR o DORIS) genera su propio marco de referencia k con coordenadas y velocidades conocidas para cada estacioacuten i en cada eacutepoca ts de observacioacuten por lo tanto las soluciones de las teacutecnicas se deben
combinar para estimar las posiciones y velocidades en el marco ITRF ( iITRFX y
i
ITRFXbull
) en una eacutepoca de referencia t0 para cada estacioacuten i asiacute como los paraacutemetros de transformacioacuten (factor de escala Dk vector de traslaciones Tk en X Y Z y matriz de
rotaciones Rk sobre los ejes X YZ) y sus variaciones ( KDbull
KTbull
KRbull
) entre el marco ITRF (marco final combinacioacuten de todos los k) y el correspondiente k paraacutemetros que a su vez pueden estar referidos a un eacutepoca tK diferente de las anteriores La combinacioacuten general se ajusta a las ecuaciones
( ) ( )( )
01
i i i i i i i i iks ITRF s ITRF k k ITRF k ITRF s k k ITRF k ITRF
i i i is ITRF k k ITRF k ITRF
X X t t X T D X R X t t T D X R X
X X T D X R X
bull bull bull bull
bull bull bull bull bull
= + minus + + + + minus + +
= + + + La segunda ecuacioacuten se obtiene a partir de derivar la primera y considerar que las derivadas segundas son nulas (aceleracioacuten nula) y que la derivada de i
ITRFX (sobre 10 centiacutemetros por antildeo como media) multiplicada por DK o RK (que son del orden de 10-5) tambieacuten se pueden despreciar Este sistema de ecuaciones es vaacutelido para
bull Observaciones bajo la forma de serie temporal de coordenadas (por ejemplo soluciones semanales para cada estacioacuten y por tanto en su correspondiente eacutepoca ts para una determinada teacutecnica espacial) por lo que la segunda ecuacioacuten (velocidad) del sistema (1) no se utiliza y donde la solucioacuten no es maacutes que la acumulacioacuten de eacutepocas de observacioacuten
bull Observaciones bajo la forma de paraacutemetros globales (coordenadas y
velocidades) vaacutelidos para un intervalo de tiempo elevado (varios antildeos) y
Figura 13 Estaciones que forman el ITRF2000 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
16
centrado en una eacutepoca tk (que puede coincidir o no con la t0 para cada una de las teacutecnicas espaciales)
La conexioacuten entre las diferentes teacutecnicas de observacioacuten se realiza en aquellas estaciones (collocation sites) que posean dos o maacutes teacutecnicas de observacioacuten y sea posible la determinacioacuten precisa (plusmn4-5 mm de error) de los incrementos de coordenadas X Y Z (local ties) entre los instrumentos de medida (receptores GPS o DORIS telescopios y radiotelescopios) utilizando mediciones topograacuteficas o con GPS En cada una de estas estaciones se genera una solucioacuten maacutes de acuerdo con las ecuaciones (1) teniendo en cuenta los incrementos de coordenadas es decir si una estacioacuten posee instrumental VLBI y SLR y se han medido las diferencias entre los dos instrumentos de forma precisa (incrementos de X Y Z) se genera una ecuacioacuten del tipo (1) para la solucioacuten VLBI otra para la SLR y otra con los incrementos observados (por ejemplo la solucioacuten VLBI maacutes los incrementos de manera que se estaacuten dando coordenadas en el marco VLBI a la estacioacuten SLR) El establecimiento de un marco de referencia de precisioacuten no es tarea sencilla ya que la Tierra sufre deformaciones debido a su caraacutecter elaacutestico y las precisiones de las observaciones son cada vez mayores por lo que las observaciones deben ser corregidas por los efectos de
bull Mareas terrestres bull Carga atmosfeacuterica y oceaacutenica
bull Tectoacutenica de placas El modelo utilizado hasta el ITRF2005 (incluido) es el
NNR-NUVEL-1A basado en que no existen rotaciones sobre el manto de las placas tectoacutenicas y por tanto la suma de las velocidades de las placas sobre toda la Tierra es cero Para el ITRF2008 se utiliza un modelo basado en las propias velocidades de las estaciones ITRF observadas con teacutecnicas espaciales el APKIM2005 (las velocidades presentan tambieacuten error ya que se obtienen a partir de caacutelculos)
bull Movimientos locales y regionales Un ejemplo seriacutea el rebote postglacial de
Escandinavia
Por tanto y tal como se pude ver en la tabla 3 el ITRF es un marco dinaacutemico que cambia de acuerdo a las variaciones temporales de las coordenadas y velocidades debido a los efectos anteriores
251- ITRF2000 ITRF2005 e ITRF2008
El marco ITRF2000 estaacute basado en 800 determinaciones en cerca de 500 sitios figura 13 estaacute referido a la eacutepoca 19970 (t0=19970) quedando determinado a partir de soluciones globales para cada marco k en una eacutepoca de referencia tk Para resolver el sistema de ecuaciones (1) es necesario fijar el datum de alguna manera el datum de la solucioacuten ITRF2000 quedoacute definido de la siguiente manera
bull Escala Media ponderada de determinadas medidas VLBI y SLR de alta
precisioacuten Esto se materializa fijando a cero el valor de escala y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 y las estaciones seleccionadas
bull Oriacutegen Media ponderada de determinaciones SLR (el centro de la oacuterbita de los
sateacutelites corresponderaacute al geocentro terrestre) Esto se materializa fijando a cero el valor del vector de traslacioacuten y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 las estaciones seleccionadas
17
bull Orientacioacuten Seleccioacuten de determinadas estaciones ITRF (sus coordenadas y velocidades) de alta calidad geodeacutesica que cumpla con los siguientes criterios
1 Que posea observaciones continuas al menos de los 3 uacuteltimos antildeos 2 Localizado en plataforma riacutegida y lejos de zonas de deformacioacuten 3 Que se haya determinado la velocidad con una precisioacuten mejor a
3mmantildeo 4 Que la velocidad sea menor a 3mmantildeo
Basado en estos criterios las 54 estaciones seleccionadas se pueden ver en la figura 14 como puntos azules En el sistema de ecuaciones (1) se introduce una ecuacioacuten de condicioacuten de forma que para estos puntos seleccionados exista correspondencia entre la orientacioacuten del marco de referencia y la del marco de referencia anterior (ITRF19970 por lo que no seraacuten maacutes que las definidas en la orientacioacuten BIH para 19840) La variacioacuten en la orientacioacuten (variacioacuten de estas coordenadas) seraacute la del modelo NNR-NUVEL-1A
El marco ITRF2005 referido a la eacutepoca 20000 (t0=20000) se ha basado
uacutenicamente en determinaciones SLR VLBI DORIS y GPS en 608 estaciones situadas en 338 localizaciones diferentes figura 15 quedando definido a partir de series temporales continuas de observaciones (soluciones semanales para GPS entre 1996 y 2005 DORIS entre 1993 y 2005 y SLR entre 1993 y 2005 y sesiones diarias para VLBI entre 1981 y 2005) de esta manera se puede realizar un anaacutelisis maacutes riguroso de las observaciones y detectar aquellas que presenten error o discontinuidades en las series Cada eacutepoca genera sistema de ecuaciones (1) para cada teacutecnica y en caso de que una estacioacuten presente una discontinuidad en la serie una nueva posicioacuten y velocidad se deben calcular para esa estacioacuten por lo que las coordenadas y velocidades calculadas lo seraacuten para un cierto intervalo de tiempo El datum se define de la siguiente manera
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20000) y variacioacuten nula
de estos paraacutemetros entre ITRF2005 y las series SLR bull Escala Factor de escala nulo (para la eacutepoca 20000) y variacioacuten nula entre
ITRF2005 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20000) y variaciones nulas entre ITRF2005 y ITRF2000 (en las estaciones ITRF seleccionadas)
Figura 14 En azul se muestran los 54 puntos de la ITRF que cumplen con los 4 criterios y en rojo los que cumplen con los criterios 1 3 y 4
18
En la tabla 1 se pueden ver los paraacutemetros de transformacioacuten entre el marco ITRF2005 y el ITRF2000 usando 70 estaciones especiacuteficas para su caacutelculo (las mismas que las utilizadas para orientar el ITRF2005 al ITRF2000 por lo que no existen paraacutemetros de rotacioacuten en esta transformacioacuten) Los resultados muestran las traslaciones del geocentro en miliacutemetros y el factor de escala en partes por billoacuten (con la notacioacuten americana es decir 10-9) asiacute como sus variaciones temporales (miliacutemetrosantildeo y ppbantildeo) Los resultados de la transformacioacuten muestran una variacioacuten temporal de 18 miliacutemetros por antildeo entre ITRF2005 e ITRF2000 esta velocidad de movimiento del geocentro no genera la estabilidad deseada del marco de referencia por lo que este marco se debe cambiar raacutepidamente Se cree que este movimiento se debe a la reduccioacuten de estaciones SLR con el tiempo asiacute como a su mala distribucioacuten geograacutefica (muchas maacutes en el hemisferio Norte que en el Sur) asiacute como la utilizacioacuten de diferentes modelos de procesamiento SLR para la solucioacuten ITRF2005 y la ITRF2000
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) 01 -08 -58 040 -02 01 -18 008
En base a esta uacuteltima conclusioacuten el marco ITRF2008 referido a la eacutepoca 20050 (t0=20050) se basa en el reprocesamiento de todas las series de observaciones de las cuatro teacutecnicas espaciales utilizadas (VLBI entre 1980 y 2009 GPSGNSS entre 1997 y 2009 SLR entre 1983 y 2009 DORIS entre 1993 y 2009) de manera que utilicen estaacutendares actuales e ideacutenticos y el mismo software para la reduccioacuten modelizacioacuten y correccioacuten de observaciones (modelos de troposfera e ionosfera centros de fase de emisioacuten de los sateacutelites y receptores etc) De esta manera el marco ITRF conservaraacute su definicioacuten a lo largo del tiempo en cuanto a origen escala y orientacioacuten (se produciraacuten series temporales de observaciones homogeacuteneas) por lo que los estudios de deformacioacuten dinaacutemica terrestre saldraacuten beneficiados (por ejemplo es esencial para el estudio del nivel medio del mar y su variacioacuten global y regional que el marco de referencia se defina siempre igual) 608 estaciones situadas en 338 localizaciones diferentes constituyen el marco El datum ITRF2008 se define de la siguiente manera
Figura 15 Estaciones que forman el ITRF2005 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
Tabla 1 Paraacutemetros de transformacioacuten entre los marcos ITRF2005 e ITRF2000 los paraacutemetros de rotacioacuten y sus variaciones son cero
19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report
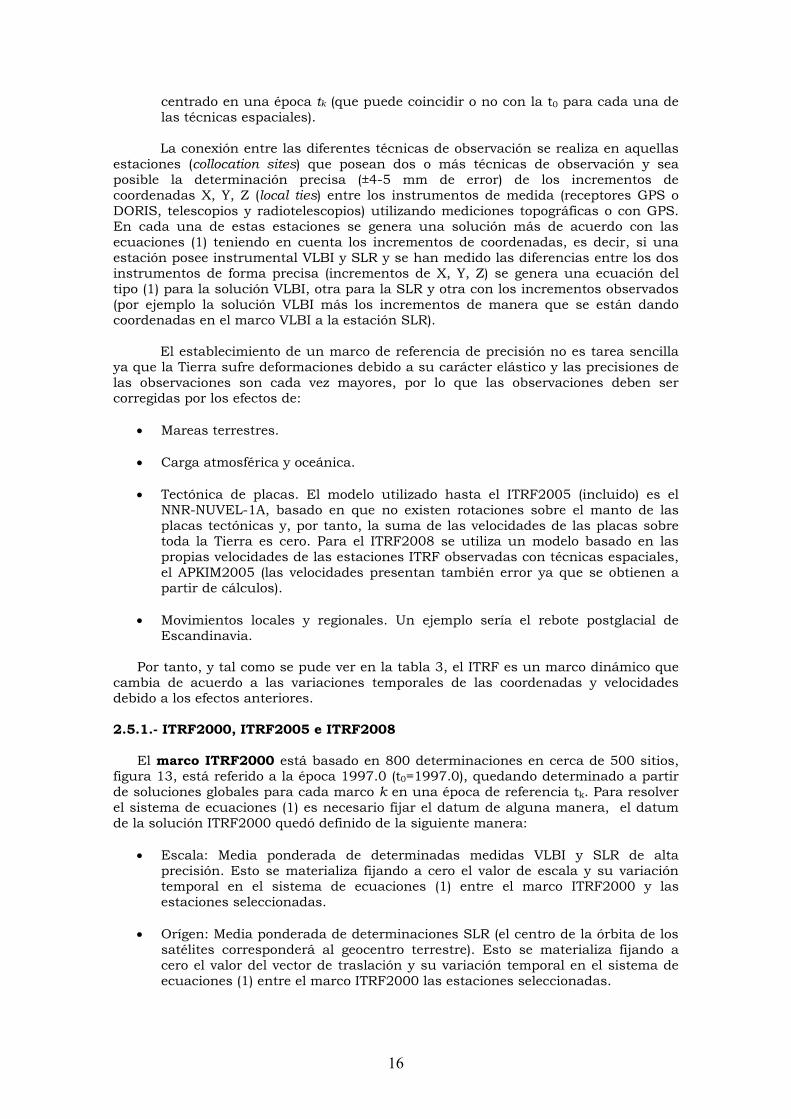
16
centrado en una eacutepoca tk (que puede coincidir o no con la t0 para cada una de las teacutecnicas espaciales)
La conexioacuten entre las diferentes teacutecnicas de observacioacuten se realiza en aquellas estaciones (collocation sites) que posean dos o maacutes teacutecnicas de observacioacuten y sea posible la determinacioacuten precisa (plusmn4-5 mm de error) de los incrementos de coordenadas X Y Z (local ties) entre los instrumentos de medida (receptores GPS o DORIS telescopios y radiotelescopios) utilizando mediciones topograacuteficas o con GPS En cada una de estas estaciones se genera una solucioacuten maacutes de acuerdo con las ecuaciones (1) teniendo en cuenta los incrementos de coordenadas es decir si una estacioacuten posee instrumental VLBI y SLR y se han medido las diferencias entre los dos instrumentos de forma precisa (incrementos de X Y Z) se genera una ecuacioacuten del tipo (1) para la solucioacuten VLBI otra para la SLR y otra con los incrementos observados (por ejemplo la solucioacuten VLBI maacutes los incrementos de manera que se estaacuten dando coordenadas en el marco VLBI a la estacioacuten SLR) El establecimiento de un marco de referencia de precisioacuten no es tarea sencilla ya que la Tierra sufre deformaciones debido a su caraacutecter elaacutestico y las precisiones de las observaciones son cada vez mayores por lo que las observaciones deben ser corregidas por los efectos de
bull Mareas terrestres bull Carga atmosfeacuterica y oceaacutenica
bull Tectoacutenica de placas El modelo utilizado hasta el ITRF2005 (incluido) es el
NNR-NUVEL-1A basado en que no existen rotaciones sobre el manto de las placas tectoacutenicas y por tanto la suma de las velocidades de las placas sobre toda la Tierra es cero Para el ITRF2008 se utiliza un modelo basado en las propias velocidades de las estaciones ITRF observadas con teacutecnicas espaciales el APKIM2005 (las velocidades presentan tambieacuten error ya que se obtienen a partir de caacutelculos)
bull Movimientos locales y regionales Un ejemplo seriacutea el rebote postglacial de
Escandinavia
Por tanto y tal como se pude ver en la tabla 3 el ITRF es un marco dinaacutemico que cambia de acuerdo a las variaciones temporales de las coordenadas y velocidades debido a los efectos anteriores
251- ITRF2000 ITRF2005 e ITRF2008
El marco ITRF2000 estaacute basado en 800 determinaciones en cerca de 500 sitios figura 13 estaacute referido a la eacutepoca 19970 (t0=19970) quedando determinado a partir de soluciones globales para cada marco k en una eacutepoca de referencia tk Para resolver el sistema de ecuaciones (1) es necesario fijar el datum de alguna manera el datum de la solucioacuten ITRF2000 quedoacute definido de la siguiente manera
bull Escala Media ponderada de determinadas medidas VLBI y SLR de alta
precisioacuten Esto se materializa fijando a cero el valor de escala y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 y las estaciones seleccionadas
bull Oriacutegen Media ponderada de determinaciones SLR (el centro de la oacuterbita de los
sateacutelites corresponderaacute al geocentro terrestre) Esto se materializa fijando a cero el valor del vector de traslacioacuten y su variacioacuten temporal en el sistema de ecuaciones (1) entre el marco ITRF2000 las estaciones seleccionadas
17
bull Orientacioacuten Seleccioacuten de determinadas estaciones ITRF (sus coordenadas y velocidades) de alta calidad geodeacutesica que cumpla con los siguientes criterios
1 Que posea observaciones continuas al menos de los 3 uacuteltimos antildeos 2 Localizado en plataforma riacutegida y lejos de zonas de deformacioacuten 3 Que se haya determinado la velocidad con una precisioacuten mejor a
3mmantildeo 4 Que la velocidad sea menor a 3mmantildeo
Basado en estos criterios las 54 estaciones seleccionadas se pueden ver en la figura 14 como puntos azules En el sistema de ecuaciones (1) se introduce una ecuacioacuten de condicioacuten de forma que para estos puntos seleccionados exista correspondencia entre la orientacioacuten del marco de referencia y la del marco de referencia anterior (ITRF19970 por lo que no seraacuten maacutes que las definidas en la orientacioacuten BIH para 19840) La variacioacuten en la orientacioacuten (variacioacuten de estas coordenadas) seraacute la del modelo NNR-NUVEL-1A
El marco ITRF2005 referido a la eacutepoca 20000 (t0=20000) se ha basado
uacutenicamente en determinaciones SLR VLBI DORIS y GPS en 608 estaciones situadas en 338 localizaciones diferentes figura 15 quedando definido a partir de series temporales continuas de observaciones (soluciones semanales para GPS entre 1996 y 2005 DORIS entre 1993 y 2005 y SLR entre 1993 y 2005 y sesiones diarias para VLBI entre 1981 y 2005) de esta manera se puede realizar un anaacutelisis maacutes riguroso de las observaciones y detectar aquellas que presenten error o discontinuidades en las series Cada eacutepoca genera sistema de ecuaciones (1) para cada teacutecnica y en caso de que una estacioacuten presente una discontinuidad en la serie una nueva posicioacuten y velocidad se deben calcular para esa estacioacuten por lo que las coordenadas y velocidades calculadas lo seraacuten para un cierto intervalo de tiempo El datum se define de la siguiente manera
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20000) y variacioacuten nula
de estos paraacutemetros entre ITRF2005 y las series SLR bull Escala Factor de escala nulo (para la eacutepoca 20000) y variacioacuten nula entre
ITRF2005 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20000) y variaciones nulas entre ITRF2005 y ITRF2000 (en las estaciones ITRF seleccionadas)
Figura 14 En azul se muestran los 54 puntos de la ITRF que cumplen con los 4 criterios y en rojo los que cumplen con los criterios 1 3 y 4
18
En la tabla 1 se pueden ver los paraacutemetros de transformacioacuten entre el marco ITRF2005 y el ITRF2000 usando 70 estaciones especiacuteficas para su caacutelculo (las mismas que las utilizadas para orientar el ITRF2005 al ITRF2000 por lo que no existen paraacutemetros de rotacioacuten en esta transformacioacuten) Los resultados muestran las traslaciones del geocentro en miliacutemetros y el factor de escala en partes por billoacuten (con la notacioacuten americana es decir 10-9) asiacute como sus variaciones temporales (miliacutemetrosantildeo y ppbantildeo) Los resultados de la transformacioacuten muestran una variacioacuten temporal de 18 miliacutemetros por antildeo entre ITRF2005 e ITRF2000 esta velocidad de movimiento del geocentro no genera la estabilidad deseada del marco de referencia por lo que este marco se debe cambiar raacutepidamente Se cree que este movimiento se debe a la reduccioacuten de estaciones SLR con el tiempo asiacute como a su mala distribucioacuten geograacutefica (muchas maacutes en el hemisferio Norte que en el Sur) asiacute como la utilizacioacuten de diferentes modelos de procesamiento SLR para la solucioacuten ITRF2005 y la ITRF2000
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) 01 -08 -58 040 -02 01 -18 008
En base a esta uacuteltima conclusioacuten el marco ITRF2008 referido a la eacutepoca 20050 (t0=20050) se basa en el reprocesamiento de todas las series de observaciones de las cuatro teacutecnicas espaciales utilizadas (VLBI entre 1980 y 2009 GPSGNSS entre 1997 y 2009 SLR entre 1983 y 2009 DORIS entre 1993 y 2009) de manera que utilicen estaacutendares actuales e ideacutenticos y el mismo software para la reduccioacuten modelizacioacuten y correccioacuten de observaciones (modelos de troposfera e ionosfera centros de fase de emisioacuten de los sateacutelites y receptores etc) De esta manera el marco ITRF conservaraacute su definicioacuten a lo largo del tiempo en cuanto a origen escala y orientacioacuten (se produciraacuten series temporales de observaciones homogeacuteneas) por lo que los estudios de deformacioacuten dinaacutemica terrestre saldraacuten beneficiados (por ejemplo es esencial para el estudio del nivel medio del mar y su variacioacuten global y regional que el marco de referencia se defina siempre igual) 608 estaciones situadas en 338 localizaciones diferentes constituyen el marco El datum ITRF2008 se define de la siguiente manera
Figura 15 Estaciones que forman el ITRF2005 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
Tabla 1 Paraacutemetros de transformacioacuten entre los marcos ITRF2005 e ITRF2000 los paraacutemetros de rotacioacuten y sus variaciones son cero
19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

17
bull Orientacioacuten Seleccioacuten de determinadas estaciones ITRF (sus coordenadas y velocidades) de alta calidad geodeacutesica que cumpla con los siguientes criterios
1 Que posea observaciones continuas al menos de los 3 uacuteltimos antildeos 2 Localizado en plataforma riacutegida y lejos de zonas de deformacioacuten 3 Que se haya determinado la velocidad con una precisioacuten mejor a
3mmantildeo 4 Que la velocidad sea menor a 3mmantildeo
Basado en estos criterios las 54 estaciones seleccionadas se pueden ver en la figura 14 como puntos azules En el sistema de ecuaciones (1) se introduce una ecuacioacuten de condicioacuten de forma que para estos puntos seleccionados exista correspondencia entre la orientacioacuten del marco de referencia y la del marco de referencia anterior (ITRF19970 por lo que no seraacuten maacutes que las definidas en la orientacioacuten BIH para 19840) La variacioacuten en la orientacioacuten (variacioacuten de estas coordenadas) seraacute la del modelo NNR-NUVEL-1A
El marco ITRF2005 referido a la eacutepoca 20000 (t0=20000) se ha basado
uacutenicamente en determinaciones SLR VLBI DORIS y GPS en 608 estaciones situadas en 338 localizaciones diferentes figura 15 quedando definido a partir de series temporales continuas de observaciones (soluciones semanales para GPS entre 1996 y 2005 DORIS entre 1993 y 2005 y SLR entre 1993 y 2005 y sesiones diarias para VLBI entre 1981 y 2005) de esta manera se puede realizar un anaacutelisis maacutes riguroso de las observaciones y detectar aquellas que presenten error o discontinuidades en las series Cada eacutepoca genera sistema de ecuaciones (1) para cada teacutecnica y en caso de que una estacioacuten presente una discontinuidad en la serie una nueva posicioacuten y velocidad se deben calcular para esa estacioacuten por lo que las coordenadas y velocidades calculadas lo seraacuten para un cierto intervalo de tiempo El datum se define de la siguiente manera
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20000) y variacioacuten nula
de estos paraacutemetros entre ITRF2005 y las series SLR bull Escala Factor de escala nulo (para la eacutepoca 20000) y variacioacuten nula entre
ITRF2005 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20000) y variaciones nulas entre ITRF2005 y ITRF2000 (en las estaciones ITRF seleccionadas)
Figura 14 En azul se muestran los 54 puntos de la ITRF que cumplen con los 4 criterios y en rojo los que cumplen con los criterios 1 3 y 4
18
En la tabla 1 se pueden ver los paraacutemetros de transformacioacuten entre el marco ITRF2005 y el ITRF2000 usando 70 estaciones especiacuteficas para su caacutelculo (las mismas que las utilizadas para orientar el ITRF2005 al ITRF2000 por lo que no existen paraacutemetros de rotacioacuten en esta transformacioacuten) Los resultados muestran las traslaciones del geocentro en miliacutemetros y el factor de escala en partes por billoacuten (con la notacioacuten americana es decir 10-9) asiacute como sus variaciones temporales (miliacutemetrosantildeo y ppbantildeo) Los resultados de la transformacioacuten muestran una variacioacuten temporal de 18 miliacutemetros por antildeo entre ITRF2005 e ITRF2000 esta velocidad de movimiento del geocentro no genera la estabilidad deseada del marco de referencia por lo que este marco se debe cambiar raacutepidamente Se cree que este movimiento se debe a la reduccioacuten de estaciones SLR con el tiempo asiacute como a su mala distribucioacuten geograacutefica (muchas maacutes en el hemisferio Norte que en el Sur) asiacute como la utilizacioacuten de diferentes modelos de procesamiento SLR para la solucioacuten ITRF2005 y la ITRF2000
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) 01 -08 -58 040 -02 01 -18 008
En base a esta uacuteltima conclusioacuten el marco ITRF2008 referido a la eacutepoca 20050 (t0=20050) se basa en el reprocesamiento de todas las series de observaciones de las cuatro teacutecnicas espaciales utilizadas (VLBI entre 1980 y 2009 GPSGNSS entre 1997 y 2009 SLR entre 1983 y 2009 DORIS entre 1993 y 2009) de manera que utilicen estaacutendares actuales e ideacutenticos y el mismo software para la reduccioacuten modelizacioacuten y correccioacuten de observaciones (modelos de troposfera e ionosfera centros de fase de emisioacuten de los sateacutelites y receptores etc) De esta manera el marco ITRF conservaraacute su definicioacuten a lo largo del tiempo en cuanto a origen escala y orientacioacuten (se produciraacuten series temporales de observaciones homogeacuteneas) por lo que los estudios de deformacioacuten dinaacutemica terrestre saldraacuten beneficiados (por ejemplo es esencial para el estudio del nivel medio del mar y su variacioacuten global y regional que el marco de referencia se defina siempre igual) 608 estaciones situadas en 338 localizaciones diferentes constituyen el marco El datum ITRF2008 se define de la siguiente manera
Figura 15 Estaciones que forman el ITRF2005 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
Tabla 1 Paraacutemetros de transformacioacuten entre los marcos ITRF2005 e ITRF2000 los paraacutemetros de rotacioacuten y sus variaciones son cero
19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

18
En la tabla 1 se pueden ver los paraacutemetros de transformacioacuten entre el marco ITRF2005 y el ITRF2000 usando 70 estaciones especiacuteficas para su caacutelculo (las mismas que las utilizadas para orientar el ITRF2005 al ITRF2000 por lo que no existen paraacutemetros de rotacioacuten en esta transformacioacuten) Los resultados muestran las traslaciones del geocentro en miliacutemetros y el factor de escala en partes por billoacuten (con la notacioacuten americana es decir 10-9) asiacute como sus variaciones temporales (miliacutemetrosantildeo y ppbantildeo) Los resultados de la transformacioacuten muestran una variacioacuten temporal de 18 miliacutemetros por antildeo entre ITRF2005 e ITRF2000 esta velocidad de movimiento del geocentro no genera la estabilidad deseada del marco de referencia por lo que este marco se debe cambiar raacutepidamente Se cree que este movimiento se debe a la reduccioacuten de estaciones SLR con el tiempo asiacute como a su mala distribucioacuten geograacutefica (muchas maacutes en el hemisferio Norte que en el Sur) asiacute como la utilizacioacuten de diferentes modelos de procesamiento SLR para la solucioacuten ITRF2005 y la ITRF2000
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) 01 -08 -58 040 -02 01 -18 008
En base a esta uacuteltima conclusioacuten el marco ITRF2008 referido a la eacutepoca 20050 (t0=20050) se basa en el reprocesamiento de todas las series de observaciones de las cuatro teacutecnicas espaciales utilizadas (VLBI entre 1980 y 2009 GPSGNSS entre 1997 y 2009 SLR entre 1983 y 2009 DORIS entre 1993 y 2009) de manera que utilicen estaacutendares actuales e ideacutenticos y el mismo software para la reduccioacuten modelizacioacuten y correccioacuten de observaciones (modelos de troposfera e ionosfera centros de fase de emisioacuten de los sateacutelites y receptores etc) De esta manera el marco ITRF conservaraacute su definicioacuten a lo largo del tiempo en cuanto a origen escala y orientacioacuten (se produciraacuten series temporales de observaciones homogeacuteneas) por lo que los estudios de deformacioacuten dinaacutemica terrestre saldraacuten beneficiados (por ejemplo es esencial para el estudio del nivel medio del mar y su variacioacuten global y regional que el marco de referencia se defina siempre igual) 608 estaciones situadas en 338 localizaciones diferentes constituyen el marco El datum ITRF2008 se define de la siguiente manera
Figura 15 Estaciones que forman el ITRF2005 simbolizadas seguacuten el nuacutemero de teacutecnicas espaciales diferentes que utilizan
Tabla 1 Paraacutemetros de transformacioacuten entre los marcos ITRF2005 e ITRF2000 los paraacutemetros de rotacioacuten y sus variaciones son cero
19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

19
bull Origen Paraacutemetros de traslacioacuten nulos (en la eacutepoca 20050) y variacioacuten nula de estos paraacutemetros entre ITRF2008 y las series SLR
bull Escala Factor de escala nulo (para la eacutepoca 20050) y variacioacuten nula entre
ITRF2008 y las series VLBI
bull Orientacioacuten Paraacutemetros de rotacioacuten nulos para los ejes (en la eacutepoca 20050) y variaciones nulas entre ITRF2008 y ITRF2005 (en las estaciones ITRF seleccionadas) Dentro de la solucioacuten ITRF2005 se pueden encontrar los ficheros con las
discontinuidades en las observaciones de las cuatro teacutecnicas espaciales (cambios de antena o de receptor terremotos etc)
En la tabla 2 se pueden ver los paraacutemetros de transformacioacuten entre el marco
ITRF2008 y el ITRF2005 usando para su caacutelculo 171 estaciones especiacuteficas ubicadas en 131 localizaciones Como se puede apreciar la variacioacuten de los paraacutemetros lleva a definir el ITRF2008 como un marco altamente estable
TX (mm)
TY (mm)
TZ (mm)
D (ppb) XT
bull
(mm) YTbull
(mmantildeo) ZTbull
(mmantildeo) Dbull
(ppbantildeo) -05 -09 -47 094 03 00 00 00
252- Marco de Referencia WGS84 Los valores expuestos en el apartado 241 son los actuales pero en su origen
diferiacutean con ellos por lo que los paraacutemetros diferiacutean con los adoptados por la ITRF en base a estos resultados la US Defense Mapping Agency (DMA) decidioacute reemplazar el valor de la constante KM original por el valor de la IERS y refinar las coordenadas de las 5 estaciones de control GPS (que forman el marco del sistema GPS) de manera que el marco WGS84 se alineara con el ITRF (que es maacutes preciso) realizando esta alineacioacuten de forma perioacutedica figura 16
La primera versioacuten actualizada y revisada del WGS84 vaacutelida desde el 2 de
Enero de 1994 se llamoacute WGS84(G730) donde G indica que las coordenadas se han obtenido con GPS y 730 es la semana GPS cuando la DMA implementoacute el sistema refinado
Figura 16 Localizacioacuten de las 5 estaciones de control originales que formaban el marco del sistema WGS84
Tabla 2 Paraacutemetros de transformacioacuten entre los marcos ITRF2008 e ITRF2005 los paraacutemetros de rotacioacuten y sus variaciones son cero
20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

20
En 1996 la US National Imagery and Mapping Agency (NIMA) sucesora de la
DMA implementoacute una nueva versioacuten refinada del marco que llamoacute WGS84(G873) vaacutelida desde el 29 de Septiembre de 1996 Este marco queda materializado por las coordenadas de las 5 estaciones de control anteriores figura 16
Para su alineacioacuten con el marco ITRF94 se fijaron las coordenadas de 13
estaciones ITRF94 en el proceso de caacutelculo y ajuste de las coordenadas WGS84(G873) finalmente los marcos ITRF94 para la eacutepoca 19970 y WGS84(G873) presentan diferencias menores a los 2 cm
Los refinamientos anteriores afectan a la precisioacuten de las coordenadas del
marco pero no cambian la definicioacuten original del sistema WGS84 (que sigue reteniendo el valor original para la constante KM)
Actualmente existe un nuevo refinamiento WGS84(G1150) ya que las
estaciones de referencia han aumentado de 5 a 16 10 de la fuerza aeacuterea Norteamericana y 6 de la NIMA figura 17 despueacutes de alinear esta actualizacioacuten al marco ITRF2000 fijando para el caacutelculo de las coordenadas WGS84 49 estaciones ITRF las diferencias entre WGS84(G1150) e ITRF2000 indican que se trata de marcos virtualmente ideacutenticos
253- Marco de Referencia IGS Otra realizacioacuten del ITRS es el marco IGS (Internacional GNSS Service) Ray et al (2004) Benciolini et al (2008) IGS es un organismo compuesto por maacutes de 200 agencias de todo el mundo que comparten recursos y datos de estaciones GPS o GLONASS permanentes de todo el mundo con el fin de generar productos GNSS de alta precisioacuten (oacuterbitas de los sateacutelites de las constelaciones GNSS estado de los relojes de los sateacutelites paraacutemetros de rotacioacuten terrestres etc) Este marco estaacute compuesto por cerca de 400 estaciones Figura 18 que cuentan uacutenicamente con la teacutecnica espacial GPS o GLONASS es por esto que si se utilizan uacutenicamente las observaciones de estas estaciones se puede formar un marco (el marco IGS) de referencia que seraacute maacutes consistente que el ITRF ya que no utiliza ni mezcla observaciones de otras teacutecnicas espaciales con esto no se quiere decir que sea un marco maacutes preciso que el marco ITRF Para preservar el datum (origen escala y orientacioacuten) de la solucioacuten ITRF en la solucioacuten IGS el marco IGS se alinea al marco ITRF mediante una transformacioacuten Helmert utilizando estaciones de alta calidad (90 para el marco IGSb00 y 132 para el IGS05) por lo que podemos encontrar coordenadas para una misma estacioacuten en los dos marcos de referencia IGS e ITRF que pueden llegar a variar algunos miliacutemetros
Figura 17 Marco actual del sistema WGS84
21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

21
La primera realizacioacuten fue la IGS00 (alineada al marco ITRF00 mediante 54 estaciones de alta calidad) realizacioacuten actualizada raacutepidamente a la IGSb00 Despueacutes de la realizacioacuten del ITRF2005 el 5 de Noviembre de 2006 se realizoacute la IGS05 Una de las principales diferencias entre los marcos IGS05 e IGSb00 o entre IGS05 e ITRF05 (en sus veacutertices GPS) radica en un refinamiento en la estrategia de caacutelculo para las coordenadas para obtener una gran precisioacuten de las coordenadas de un punto GPS es necesario conocer exactamente la posicioacuten del centro de fase tanto del sateacutelite como de la antena receptora La posicioacuten para la antena receptora se descompone en dos partes un sesgo entre el centro de fase y el punto de referencia de la antena y una variacioacuten respecto a este sesgo ya que el centro de fase no es algo fijo sino que depende de la elevacioacuten acimut y la intensidad de la sentildeal de los sateacutelites Normalmente los fabricantes dan las coordenadas (3D) del sesgo del centro de fase respecto al punto de referencia de la antena (normalmente la interseccioacuten de la vertical mecaacutenica con la parte baja de la antena) y se considera que las variaciones a este sesgo son despreciables por lo que se fijan a cero a este esquema se le denomina correcciones relativas del centro de fase de la antena Actualmente tanto los sesgos como las variaciones se pueden modelar Seeber (2003) para los diferentes tipos de antena existentes en el mercado esta modelizacioacuten dependeraacute de la elevacioacuten y acimut de los sateacutelites de los que recibe sentildeal El resultado final seraacute una mejora en la precisioacuten de las coordenadas determinadas en estas estaciones a este esquema se le denomina correcciones absolutas del centro de fase de la antena Este efecto afecta sobretodo a la determinacioacuten de la escala del marco IGS Asiacute el marco ITRF2005 no es consistente con las calibraciones absolutas de antena GPS Los usuarios GNSS que utilicen productos IGS (oacuterbitas paraacutemetros de rotacioacuten de la Tierra etc) en sus caacutelculos estaraacuten obteniendo las coordenadas finales de sus estaciones en el marco IGS (actualmente en el IGS05) por lo tanto seraacute el marco especiacutefico para usuarios GPS
Por uacuteltimo las actualizaciones del marco ITRF se producen aproximadamente cada 5 antildeos lo que provoca que la propagacioacuten de las coordenadas sea problemaacutetica en caso de discontinuidades (velocidades no lineales cambios de instrumentacioacuten etc) y que los datos de las estaciones despueacutes del 1 de Enero de 2006 no se tengan en cuenta por lo que no se refleja el actual estatus de la red de estaciones de referencia
Figura 18 Marco IGS
22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

22
para evitar estos problemas el marco IGS se actualiza cada semana y se distribuye en dos productos
a) Estimaciones semanales del marco referidas a la posicioacuten central de cada semana (producto muy interesante para el estudio de procesos con variacioacuten temporal no lineal)
b) Actualizaciones semanales del marco IGS El actual IGS05 se referidas a la
eacutepoca 2005 Cabe decir en este sentido que cuando se usan productos IGS variaciones inferiores a 1 cm se consideran despreciables por lo que las coordenadas de las estaciones permanentes no se cambian cada semana uacutenicamente cuando cambian 1 cm o maacutes y este cambio perdura en el tiempo lo que hace que uacutenicamente se deban cambiar las coordenadas de las estaciones de referencia 2-3 veces al antildeo
Finalmente se espera que el IGS cambie de ITRF2005IGS05 a ITRF2008IGS08 en abril de 2011 el impacto del uso de ITRF2008 e IGS08 en el anaacutelisis de los resultados de las estaciones GNSS permanentes seraacute investigado Basaacutendose en esa futura investigacioacuten se decidiraacute que marco se deberaacute utilizar para los caacutelculos en estaciones permanentes 254- Sistema y Marco de Referencia Terrestre Europeo (ETRF89) Los principales objetivos que en un principio debiacutea cubrir el marco de referencia Europeo son
bull Establecer un marco de referencia geoceacutentrico cara cualquier proyecto de ingenieriacutea y geodinaacutemico en Europa
bull Constituir una referencia de precisioacuten para geodesia y navegacioacuten en Europa
bull Eliminar los datums locales en Europa de manera que constituyese un marco
de referencia moderno que los diferentes servicios cartograacuteficos nacionales adoptasen
Dado que sobre la parte estable de Europa la precisioacuten de las posiciones individuales se encontraba ya en algunos pocos centiacutemetros en X Y y Z en 1989 se decidioacute que las coordenadas ITRF89 de las 36 estaciones europeas definieran el Marco de Referencia Terrestre Europeo (ETRF89) figura 19 el cual rota con la parte estable de la placa euroasiaacutetica y es coincidente con el ITRF en la eacutepoca 19890 Esto quiere decir que al ajustar el marco a los movimientos de la placa las coordenadas de las estaciones que forman el marco seraacuten siempre iguales (al margen de posibles movimientos producidos por causas locales) en la tabla 1 se puede ver a modo de ejemplo la coordenada Y del observatorio astronoacutemico de Robledo (Madrid) donde podemos ver que las coordenadas ITRF variacutean en las sucesivas determinaciones correspondiendo esta variacioacuten a la velocidad determinada mientras que las coordenadas en ETRF89 son constantes Como se desprende de esta tabla a cada determinacioacuten ITRF(antildeo) le corresponde una ETRF89(antildeo) o simplemente ETRF(antildeo) Actualmente la IERS pretende actualizar el marco de referencia aproximadamente cada cinco antildeos esto puede producir saltos en las coordenadas de las estaciones y discontinuidades que pueden llevar a cierto grado de confusioacuten (por ejemplo se ha constatado un salto en el eje Z entre ITRF2000 e ITRF2005 de 18 mmantildeo debido entre otras cosas a la incertidumbre de las medidas SLR en la determinacioacuten del geocentro terrestre como ya se ha dicho) evidentemente estos saltos pasaraacuten a la definicioacuten ETRF del antildeo correspondiente Este salto o offset se ha introducido en la correspondiente solucioacuten ETRF rompiendo con el caraacutecter teoacuterico de ldquocoordenadas constantesrdquo del marco europeo Para evitar que esto vuelva a suceder dado que estos saltos son inherentes del propio proceso de generacioacuten y caacutelculo de los sucesivos marcos ITRF se recomienda no utilizar el ETRF2005 (ni siquiera se ha creado) sino
23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

23
COORDENADA YVYITRF0097 -360488791plusmn0001 ETRF8900 -360488895plusmn0001
00196plusmn00002 -00006plusmn00002ITRF9797 -360488783plusmn0002 ETRF8997 -360488899plusmn0003
00197plusmn00003 -00004plusmn00004ITRF9697 -360488779plusmn0003 ETRF8996 -360488898plusmn0003
00201plusmn00004 -00008plusmn00004ITRF9493 -360488862plusmn0007 ETRF8994 -360488898plusmn0009
00193plusmn00015 -00000plusmn00015ITRF9393 -360488859plusmn0003 ETRF8993 -360488895plusmn0003
00193plusmn00004 -00001plusmn00004ITRF9288 -360488958plusmn0005 ETRF8992 -360488898plusmn0005
00203plusmn0001 -00001plusmn00010
que se debe adoptar el ETRF2000 como marco de referencia convencional definitivo (es decir se ldquocongelardquo el marco ETRF89 al ETRF2000) de todas formas para poder aprovechar las precisiones del marco ITRF2005 se recomienda que todas las estaciones europeas que posean solucioacuten en el marco ITRF2005 se expresen en el marco ETRF2000 llamando a estas coordenadas ETRF2000(R05) Esta decisioacuten se adoptoacute ademaacutes para armonizar las futuras realizaciones del sistema ETRS89 estableciendo asiacute un uacutenico marco de forma convencional comuacuten para toda Europa El marco de referencia se ha ido densificando poco a poco sobretodo gracias a las determinaciones GPS En 1990 se antildeadieron 30 estaciones maacutes a las originales desde entonces se han ido introduciendo estaciones sobretodo de Europa del Este Actualmente cerca de 90 forman la red EUREF permanente figura 20
Tabla 3 Coordenada Y y su velocidad (VY) del observatorio astronoacutemico de Robledo en el marco ITRF en sus diferentes definiciones y eacutepocas de referencia y en el marco ETRF89 en diferentes eacutepocas de referencia
Figura 19 Estaciones originales del marco ETRF89
24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

24
De igual manera que el marco IGS EUREF (IAG Sub-comission for the
European Referente Frame organismo encargado de la creacioacuten y mantenimiento del marco europeo) considera que ITRF2005 y por tanto ETRF(R05) no tiene en cuenta los datos de las estaciones despueacutes del 1 de Enero de 2006 por lo que no refleja el actual estatus de la red de estaciones permanentes para remediar este problema se ha decidido generar actualizaciones cada 15 semanas del ITRF2005 referidas a la eacutepoca 2005 generando por tanto las correspondientes actualizaciones de la densificacioacuten ETRF2000(R05) y separando las estaciones en dos categoriacuteas
-Clase A Coordenadas con 1 cm de precisioacuten en todas las eacutepocas de las
observaciones usadas clase por tanto reservada para las estaciones de referencia -Clase B Coordenadas con 1 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten -Clase C Coordenadas con 5 cm de precisioacuten en la eacutepoca de observacioacuten de
mayor precisioacuten Con el real decreto 10712007 del 27 de Julio de 2007 por el que se regula el
sistema geodeacutesico de referencia oficial se pone fecha de 1-1-2015 a la adopcioacuten oficial del sistema ETRS89 en toda la cartografiacutea y Bases de datos de informacioacuten geograacutefica y cartograacutefica producida o actualizada por las administraciones puacuteblicas en Espantildea por lo que cualquier profesional relacionado con la cartografiacutea la topografiacutea y la geodesia debe ser perfecto conocedor de ese sistema de referencia y como obtener coordenadas en el mismo BIBLIOGRAFIA Altamimi Z (2002) The SLR contribution to the ITRF 13th International Workshop on
Laser Ranging Proceedings from the science session Washington Altamimi Z Sillard P Boucher C (2002) ITRF2000 A new realease of the
international terrestrial reference frame for earth science applications Journal of Geophysical Research Vol 107 nordm B10 pp 2214-2233
Figura 20 Estaciones EUREF que forman el marco ETRF89 en la actualidad
25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

25
Altamimi Z Boucher C Sillard P (2002) New treds for the realization of the
International Terrestrial Reference System Advances in Space Research Vol 30 nordm 2 pp 175-184
Altamimi Z Sillard P Boucher C (2004) ITRF2000 from theory to implementation V
Hotine-Marussi Symposium on mathematical Geodesy IAG Vol 127 Springer pp 157-163
Altamimi Z Collilieux X Legrand J Garayt B Bouguer C (2007) ITRF2005 a new
realease of the internacional terrestrial referente frame based on series of stations positions and earth orientation parameters Journal of Geophysical Research Vol 112 nordmB09401
Altamimi Z Collilieux X Boucher C (2008) Accuracy Assessment of the ITRF datum
definition Observing our changing Earth IAG Vol 133 Springer pp 615-623 Altamimi Z Collilieux X (2009) IGS contribution to the ITRF Journal of Geodesy nordm
83 pp 375-383 Altamimi Z Collilieux X Boucher C (2009) Strengthes and limitations of the ITRF
ITRF2005 and beyond Geodetic Reference Frames IAG Vol 134 Springer pp 73-79
Angermann D Drewes H Gerstl M Kruumlgel M Meisel B (2009) DGFI combination
Methodology for ITRF2005 computation Geodetic Reference Frames IAG Vol 134 Springer pp 11-16
Benciolini B Biagi L Crespi M Manzino AM Roggero M (2008) Referente frames for GNSS positioning services some problems and proponed solutions Journal of Applied Geodesy 2 pp 53-62
Collilieux X Meacutetivier L Altamimi Z Van Dam T Ray J (2010) Quality assessment
of GPS reprocessed terrestrial referente frame GPS solutions nordm 4 ftp laregensgignfrpub Hofmann-wellenhof B Lichtenegger H Collins J (2001) GPS Theory and Practice 5th
edition Ed SpringerWienNewYork HttplaregensgignfrEUREF Httpwwwiersorg Httpwwwobspmfr Lambeck K (1986) The Earthrsquos Variable rotation some geophysical causes The
Earthrsquos rotation and reference frames for geodesy and geodynamics IAU symposium nordm 128 1-20
McCarthy D (2000) IERS Conventions (2000) IERS Technical Note International
Earth Rotation Service Moritz H (1984) Geodetic Reference System 1984 Bulletin Geacuteodeacutesique nordm 58 187-
192 Moritz H (1984) Sistemas de referencia en geodesia Cursillos de geodesia superior
cursos y seminarios nordm1 IGN IAG Madrid 1-44
26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report

26
Mueller J (1988) Reference coordinate systems an update Ohio State University Report nordm 394
Ray J Dong D Altamimi Z (2004) IGS reference frame status and future
improvements dentro de Proceedings of IGS Celebrating a decade of the International GPS Service Berna 1-5 de marzo de 2004
Rodriacuteguez E Catarla JL (1999) IBERIA95 Red Peninsular de Orden Cero
Publicacioacuten teacutecnica nordm 30 Ministerio de Fomento Instituto Geograacutefico Nacional
Seeber G (2003) Satellite Geodesy 2nd edition Ed Walter de Gruyter Sevilla MJ (2003) Actualizacioacuten de caacutelculos astronoacutemicos Cursos y seminarios nordm 8
Instituto de Astronomiacutea y Geodesia CSIC UCM Torge W (2001) Geodesy 3rd edition Ed Walter de Gruyter World Geodetic System 1984 (1991) DMA Technical Report