sistemas electromecanicos 1. introducción 2....
TRANSCRIPT

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
1 de 35 (Versión 25/3/06)
SISTEMAS ELECTROMECANICOS 1. Introducción Los sistemas físicos consisten en componentes o elementos interconectados. El primer paso del análisis es obtener un modelo matemático que se forme con los modelos de cada componente. El modelo matemático es una serie de relaciones entre entradas y salidas. El modelo matemático de los componentes se obtiene de observaciones experimentales y/o la ayuda de ciertos postulados fundamentales. Una vez modelado el sistema puede resolverse la salida por técnicas analíticas o computacionales. 2. Clasificación de sistema 2.1. Una representación esquemática
Figura N° 1
r(t) = G.e(t) Puede haber varias excitaciones y respuestas simultáneas. 2.2. Sistemas continuos o discretos Son continuos si e(t) y r(t) son funciones continuas del tiempo y pueden variar en cualquier instante. Son discretos si e(t) y r(t) sólo pueden cambiar en ciertos instantes discretos 2.3. Sistemas variantes o invariantes con el tiempo Es invariante si: e(t) produce r(t)
y e(t-T) produce r(t-T)
Figura N° 2
e(t) r(t) Sistema G
e(t) r(t) e(t) r(t)
t t t t T T

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
2 de 35 (Versión 25/3/06)
2.4. Sistemas lineales o no lineales Son lineales si las excitaciones vector [e]1 produce [r]1 y también:
[e]2 produce [r]2 y se cumple G[a1[e]1 + a2[e]2 ] = a1[r]1 + a2[r]2
y entonces puede aplicarse superposición. 2.5. Sistemas de parámetros concentrados o distribuidos Concentrados si los componentes pueden considerarse en un punto del espacio, o sea que las relaciones matemáticas que describen G no involucran ninguna variable espacial. Por ejemplo una línea de transmisión de 1.000 metros (1 km) puede considerarse concentrada si la frecuencia a la que opera es baja (a 50 Hz la longitud de onda es 6.000 km, o sea que la línea es 6.000 veces más chica). Pero a 10 MHz la longitud de onda es de 30 metros o sea que la línea es algo mayor que 30 veces la longitud de onda y hay que modelarla como distribuida. En este capítulo de la materia se considerarán los sistemas como continuos, lineales, concentrados y casi siempre invariantes. 2.6. Modelos Resulta necesario describir un sistema en términos de un modelo idealizado. Por ejemplo la resistencia eléctrica R ideal satisface la ley de Ohm, pero las resistencias reales sólo la satisface aproximadamente (si la corriente es variable en el tiempo aparecen fenómenos inductivos, además de capacitivos). El cuerpo rígido también es un modelo ideal. 3. Revisión de la representación de sistemas eléctricos 3.1. Resistencia
)(.)( tiRtv = R[Ω] La energía se disipa como calor:
Rtitp ).()( 2= 3.2. Inductancia (ver Figura N°3b)
⇒=dt
tdiLtv )(.)( )0().(1).(1)(0
++== ∫∫ idttvL
dttvL
tit
L[H=Wb/A]

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
3 de 35 (Versión 25/3/06)
La energía almacenada será:
dtditLi
dtdWptLitW ).()(
21)( 2 ==⇒=
3.3. Capacitor (ver Figura N°3c)
dttdvCti
dtdqtiytvCtq )()()()(.)( =⇒== C[F=Coul/V]
también:
)0().(1).(1)(0 C
tvdtti
Cdtti
Ctv +== ∫∫
La energía almacenada será:
dttdvtCv
dtdWptCvtW )().()(
21)( 2 ==⇒=
θ
θ
φ
θ
Figura N° 3 : (a) R es Invariante con el tiempo, (b) L es Invariante con el tiempo, (c) C es Invariante con el tiempo

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
4 de 35 (Versión 25/3/06)
3.4. Fuentes independientes
Figura N° 4
La fuente vf o if puede o no depender del tiempo, pero es independiente del valor de corriente o tensión 3.5. Fuentes dependientes o controladas
µ
α
Figura N° 5
La Figura N°5(a) muestra la representación de una fuente de tensión controlada por corriente, la Figura N°5(b) muestra la representación de una fuente de tensión controlada por tensión, la Figura N°5(c) muestra la representación de una fuente de corriente controlada por tensión y la Figura N°5 (d) muestra la representación de una fuente de corriente controlada por corriente. 4. Analogías entre sistemas de distinto tipo Hay varios sistemas (mecánicos, térmicos, hidráulicos, acústicos, etc. ) que pueden ser reducidos a sistemas eléctricos “análogos” por estar descriptos por iguales ecuaciones diferenciales. Desarrollado el problema eléctrico, sus resultados pueden ser trasladados en forma directa e inmediata al problema real. No debe limitarse sin embargo el interés en este tema a las analogías con la batería de formas de resolución de problemas eléctricos que estudia el Ingeniero Electricista sino comprender conceptualmente el comportamiento físico de los distintos tipos de sistemas, lo que luego facilitará enormemente la interpretación intuitiva de cómo responderán las variables eléctricas del sistema eléctrico que interactúa con el otro.

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
5 de 35 (Versión 25/3/06)
El presente estudio se limitará a los sistemas mecánicos (de 2 y 4 terminales, de traslación y de rotación) cuyas variables dependan de una sola dimensión. Los sistemas mecánicos pueden ser: • Traslacionales • Rotacionales • Mixtos 5. Representación de sistemas mecánicos 5.1. Elementos activos Son los que suministran energía al sistema. Normalmente se los reducirá a fuentes o generadores puros o ideales, separando los elementos pasivos que contengan. Fuentes puras de:
Figura N° 6
5.2. Elementos pasivos de dos terminales de traslación Son los que disipan o almacenan energía. 5.2.1. Amortiguador:
vBtf .)( = [1]
v = velocidad relativa entre terminales. B = Constante de fricción viscosa [N.seg/m]. Resistencias al movimiento: ♦ De frotamiento ó roce: f = constante (Ej.: cojinetes al arrancar). ♦ Viscosa (se usará esta): f = B . v (Ej.: cojinetes) [2] ♦ Hidráulica: f = k . v2 (Ej.: ventiladores) ♦ Balística: f = k . vn o f = f(v). (Ej.: proyectiles).
Velocidad
Fuerza o Cupla
No se ven influidas por la carga

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
6 de 35 (Versión 25/3/06)
Figura N° 7
Sólo se considerará la fricción viscosa en el presente capítulo:
⎟⎠⎞
⎜⎝⎛ −=
dtdx
dtdxBtf 21.)( ; B [N/m/seg]
con f medido en la dirección x, es la fuerza externa aplicada. El amortiguador ejerce una fuerza que se opone a que exista diferente velocidad en cada uno de sus extremos. Potencia instantánea:
Bfv.Bv.f
dtdwp
22 ====
Siempre “ +” o sea que siempre consume energía, es disipativo.
dxfdtdtdxfdw ... =⎟
⎠⎞
⎜⎝⎛=
y si por ejemplo f fuera constante:
∫ ∫ ====B
tfdtBfxfdww ..
22
Crece con t. 5.2.2. Resorte f = k . x [3] Ley de Hook, f es la fuerza externa aplicada.
21 xxx −= ; k [N/m]

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
7 de 35 (Versión 25/3/06)
Figura N° 8 k = constante del resorte. x = “alargamiento”, definido así : x =(x1 – x2) - (x10- x20) = X - X0 Cuando el resorte es extendido, ejerce la fuerza f para recuperar su longitud original.
Figura N° 9
∫= dt.v.kf
dtdXvXX =⇒− 0
entonces:
⎟⎠⎞
⎜⎝⎛=
dtdf.
kv 1
kfkXdxXkdt
dtdXfdtvfw
22......
22
===⎟⎠⎞
⎜⎝⎛== ∫∫ ∫
y como no depende de t, almacena energía ( si x = 0 , w = 0 )

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
8 de 35 (Versión 25/3/06)
5.2.3. Masa: Se considera un cuerpo rígido.
).( vmdtdf = , si m es constante
⎟⎟⎠
⎞⎜⎜⎝
⎛=== 2
2
dtxd
dtdvm.m.af .m [4]
relaciona la fuerza externa aplicada con la aceleración que produce.
2......
2vmdtvmdtvfW =⎟⎠⎞
⎜⎝⎛== ∫ ∫ dtdv
también almacenador o acumulador de energía.
Figura N° 10
6. Circuito electromecánico
Figura N° 11
Dado el sistema de la Figura Nº11, al plantear las ecuaciones de cuerpo libre tenemos: • Según Newton: F - B . v - k . x = m . a [5] ó

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
9 de 35 (Versión 25/3/06)
• Según principio de D’Alambert:
0...0. =−−−⇒=−∑ amxkvBFamf (Kirchoff) [6] comparando con el circuito eléctrico serie (Analogía de malla), tenemos:
FdtdvmdtvkvB =++ ∫ ...
UdtdiLdti
CiR =++ ∫ ..1. [7]
surge una analogía inmediata pero con un inconveniente: Las variables se denominan: • Transvariables o entre 2 puntos: u, x, v, etc. • Pervariables o por 1 punto: i , f , T , etc. y la analogía resultó ser cruzada o inversa: • PER f ⇔ u TRANS • TRANS v ⇔ i PER Comparando en cambio con el circuito paralelo (analogía de nodos o directa) tenemos:
FdtdvmdtvkvB =++ ∫ ...
IdtduCdtu
LRu
=++ ∫ '..'
1'
[8]
Los parámetros van primados porque no tienen el mismo valor numérico que en la analogía anterior (inversa) Resultó ser directa: • PER f ⇔ i PER • TRANS v ⇔ u TRANS

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
10 de 35 (Versión 25/3/06)
6.1. Resumen comparativo Para construir el circuito mecánico: a) se identifican los puntos rígidos del sistema (nodos) con un nodo de referencia para
ubicar las masas y que las fuerzas de inercia estén relacionadas con él. b) se ubican los elementos pasivos entre los nodos correspondientes c) se ubican las fuentes prestando atención a su sentido (un incremento de la fuerza
debe producir un incremento de la velocidad).
Figura N° 12
Nota 1: Obsérvese que la fuerza apunta al signo + si v y F son de igual sentido. La analogía de nodos es más natural y es la que se usa en la práctica. Se seguirá con ella a partir de aquí. Las equivalencias básicas son entonces:
dtdQi =
dtdp
dt)v.m(d
dtdv.ma.mf t====
tpQ ≡∴
con pt = m . v = cantidad de movimiento de traslación
dtdu λ=
con λ = flujo concatenado = N.Φ;

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
11 de 35 (Versión 25/3/06)
dtdxv =
λ≡∴ x
6.2. Potencias p = u . i; p = v . f 6.3. Energías
∫ ∫ ∫∫ ==== tdp.vdQ.udx.fd.iw λ (relaciones cruzadas, ver más adelante) El sistema es relajado cuando sus condiciones iniciales son nulas: x(0) = 0 v(0) = 0 es decir, cuando el sistema no tiene energía almacenada al aplicarse la excitación. 7. Elementos pasivos de dos terminales de rotación. Procediendo por analogía con el caso de traslación, se cambiará T por f y Ω por v. La validez de las ecuaciones que se obtienen puede verificarse por la aplicación de las leyes de la mecánica. 7.1. Amortiguador rotatorio T = B . Ω [9] T=cupla externa aplicada B = cte = fricción viscosa [N.m.seg]
dtθd
=Ω = velocidad angular
Ω
θ+
θ−
Figura N° 13

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
12 de 35 (Versión 25/3/06)
dtdpT r= , con
pr = m.v.r=m.r2 .Ω = J.Ω. (si se tratara de una masa m girando a velocidad tangencial v con un radio de rotación r) pr = momento de la cantidad de movimiento de rotación = momento cinético
La potencia: B
T.BT.p2
2 =Ω=Ω=
Y la energía: ∫∫ Ω=Ω= dt..Bdt..Tw 2 si cte=Ω
t..Bw 2Ω= entonces se ve que es disipativo.
Nota: θ
=⇒=ddwT
dxdwf [10]
7.2. Resorte torsional:
θ.kT = , k [N.m] [11] Luego:
( ) ( )[ ] ( ) ∫Ω=Θ−Θ=−−−= −+−+ dtkkkT .... 000 θθθθ
dtdT.
k1
=Ω∴
con k = rigidez elástica Ej: eje rígido:
∞===0TTk
θ
( )0Θ−Θ= ddθ
⇒==⎟⎠⎞
⎜⎝⎛=Ω=∴ ∫∫ k
TkdtdtdTdtTw
.22.....
22θθ Acumulador

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
13 de 35 (Versión 25/3/06)
Θ
Ω
Ω+ Ω
Figura N° 14
7.3. Volante
γ=Ω==•
.J.Jdt
dpT r [12]
∫=Ω dt.T.J1
θθθ
θθ ddtd
ddJd
dtdJdTdtTw ........ ⎟
⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛ Ω
=⎟⎠⎞
⎜⎝⎛ Ω
==Ω= ∫∫∫∫
2.Jd..Jw
2Ω=ΩΩ= ∫
ó ⇒Ω=Ω⎟⎠⎞
⎜⎝⎛ Ω=Ω= ∫∫ 2
.Jdt..dtd.Jdt..Tw
2
Acumulador
Figura N° 15 La analogía con la traslación es inmediata, poniendo:
θ→x Θ→X Tf → Ω→v Jm → 7.4. Ecuaciones dinámicas
∑=θ
i2
2
Tdtd.J (Newton)

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
14 de 35 (Versión 25/3/06)
ó
0Tdtd.J i2
2
=−θ ∑ (D’Alambert) [13]
Los circuitos equivalentes mecánico y eléctrico son iguales con el solo cambio en el mecánico de T, Ω y J. También se emplea la analogía paralelo, cuyo resumen de variables y magnitudes derivadas se expresa por las siguientes relaciones cruzadas:
λ
Ω
θ
--- - --- - ---> Potencia --------------> Energía
O Variables “Per” ó a través de un punto
Variables “Trans” ó entre dos puntos
Figura N° 16 8. RELACIONES CIRCUITALES 8.1. Impedancia:
Es la relación entre las variables derivadas Trans y Per. Admitancia es la relación
inversa. En mecánica tenemos: 8.1.1. Traslación:
fvZt =
vfYt =
8.1.2. Rotación:
TZr
Ω=
Ω=
TYr
Empleando el operador:

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
15 de 35 (Versión 25/3/06)
dtdp =
∫∞−
=t
dt p1
La impedancia operacional para la traslación será: Amortiguador:
v.Bf = B1)p(Zt =∴ B)p(Yt =
Resorte:
∫ ==pv.kdt.v.kf
kp)p(Zt =∴
pk)p(Yt =
Masa:
v.p.mdtdv.mf ==
p.m1)p(Zt =∴ p.m)p(Yt =
para la rotación igual salvo el intercambio de m por J. En resumen:
ο vΩ
Ω
θ
Figura N° 17
m).p ó J(pkB)p(Y ++= p.C
p.L1G)p(Y ++=
m).p ó J(1
kp
B1)p(Z ++=
p.C1p.LR)p(Z ++=

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
16 de 35 (Versión 25/3/06)
Para la traslación, si actúa la fuerza de gravedad:
Figura N° 18
Las masas definen los nodos en el circuito. Cuando f y v coinciden en su sentido, f apunta al nodo +. 9. Leyes de Kirchoff Se cumplen sin limitaciones. Dado, por ejemplo, un sistema de traslación, valen las siguientes leyes de equilibrio: • 0f
ii =∑ en todo nodo (o sea en las masas, por el principio de D’Alambert)
• 0vi
i =∑ en toda malla.
10. Variables de estado Si en un sistema con parámetros concentrados las ecuaciones diferenciales se escriben como una función matricial de la forma:
( )[ ]ttUtxftxdtd ),(),()( =⎥⎦
⎤⎢⎣⎡ , donde
[x] es un vector de n componentes [U] es un vector de m componentes que representa el conjunto de excitaciones t es el tiempo Se dice que las ecuaciones son ecuaciones de estado. El vector [x] representa el estado del sistema y sus componentes son las variables de estado. Una colección de datos puede llamarse estado de un sistema si satisface las condiciones siguientes:

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
17 de 35 (Versión 25/3/06)
a) para cada instante t1 el estado en t1 y el conocimiento de la forma de onda de la excitación entre t1 y t permite calcular el nuevo estado en t> t1 b) el conocimiento del estado en t y de la excitación en t debe permitir calcular en forma única el valor de las variables del sistema en t Si se considera al estado como un vector, las componentes de ese vector se llaman variables de estado. Este sistema de ecuaciones diferenciales tiene varias ventajas: - se puede aplicar el método de análisis a circuitos diversos - se establece un marco teórico para el estudio de sistemas lineales y no lineales - facilita el cálculo digital - el concepto de variable de estado tiene fuertes bases físicas Las variables de estado definen el estado energético de los elementos que acumulan energía y que en consecuencia pueden tener condiciones iniciales. Por ejemplo:
• 2.
.22.
.22. 22222 θk
kTxk
kfiL
=→=→ , donde i, f, x, T, θ son variables de estado
• 2.J
2v.m
2u.C 222
c Ω→→ , donde uc, v, Ω son variables de estado
La ventaja de su empleo radica en que las ecuaciones sólo tienen derivadas de primer orden (existen numerosas rutinas de resolución) y permiten determinar las constantes de integración fácilmente a través de las condiciones iniciales. En efecto, dado que : w(0-) = w(0+), (el caso contrario sería imposible:
∞== =0tdtdwp ), o sea que w(t) debe ser continua), se cumple que:
• il(0-) = il(0+), también serán continuas fk y Tk • uc(0-) = uc(0+), también serán continuas vm y ΩJ 10.1. Ejemplo introductorio
i.p.LR.iu +=
u.L1i.
LRi.p +⎟
⎠⎞
⎜⎝⎛−=
Comentario: rev 26-3-07
Comentario: rev 26-3-06

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
18 de 35 (Versión 25/3/06)
Figura N° 19, conexión de circuito RL
En general para un circuito complejo tenemos:
[ ] [ ] [ ] [ ] [ ]111
..mxnxnxUBxAx +=& [16]
expresión simbólica en forma canónica, con [x] vector de estado y [U] vector de excitación. Las matrices [A] y [B] sólo dependen de los parámetros y de la topología. Su solución inmediata es: [ ] [ ] [ ]( ) [ ][ ]UBApx ...1 1−−= [17] Tiene una solución inmediata que depende del valor de [x] en el instante inicial t0 y de la forma de onda de las componentes de [U] en el intervalo. Para el ejemplo anterior es:
( )Rp.Lu
Lu.
LRp
i+
=⎟⎠⎞
⎜⎝⎛ +
=1
[ ] [ ]( ) 1Ap.1
LRp
1 −−=⎟⎠⎞
⎜⎝⎛ +
y BL
=1
Cada una de las variables x = x(p) se halla con los métodos del análisis matemático (homogénea + particular = natural o libre + forzada):
t.pjfnf
je.Axxxx ∑+=+= Para el ejemplo dado: • Forzada:
RU
pLRui
Uupf =
+=
==0.
, con p = 0 por ser CC.
• Natural:

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
19 de 35 (Versión 25/3/06)
0u =
0p.LR =+∴ LRp1 −= τ
−−==
tt.LR
n e.ke.ki
Si ⇒= 0)0(i RUk0 += ⎟⎟
⎠
⎞⎜⎜⎝
⎛−= τ
−t
e1RUi
11. ELEMENTOS PASIVOS DE 4 TERMINALES Estos elementos también son llamados transductores : cambian unas variables en otras, de igual o distinta naturaleza. Todos ellos pueden ser representados por un transformador ideal con relación de transformación adecuada (var.entre1/var.entre2). 11.1. Palanca de traslación (ver Figura N°20)
∴= 2211 f.Lf.L 1
2
2
1
2
1
ff
LL
vv
== [18]
α
Figura N° 20
Se la puede reemplazar por un transformador ideal (sin consumo interno de energía), en el cual f2 sale por la convención adoptada para los sentidos de x, v, f
Comentario: rev 27-3-06

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
20 de 35 (Versión 25/3/06)
11.2. Torno de traslación- rotación
Tf
R1
v==Ω [19]
Ω
Ω
Figura N° 21
11.3. Engranajes ideales (J=B=0) Sean 2 engranajes de Z1 y Z2 dientes( Figura N° 22), despreciando la fricción viscosa entre ellos y considerándolos sin masa, tenemos:
α2,ω2
α1,ω1
Figura N° 22
1
2
1
2
2
12211
2
1
2
1 ;;22
ZZ
RR
RRRR
ZZ
====αα
ααππ
2
1
1
2
2
12211 ;
ZZ
TT
TT ===αα
αα
Transformador análogo Se puede modelizar el engranaje ideal con el siguiente circuito equivalente (transformador ideal, mallas o nodos):

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
21 de 35 (Versión 25/3/06)
Ω1 Ω2
T1 T2
Z2 : Z1 Z2 : Z1
Ω1 Ω2
Ω2
T2
T1
Figura N° 23
11.4. Engranaje no ideal
´1
112
12
11 Tdt
dB
dtd
JT ++=αα
22
222
2
2´2 T
dtd
Bdt
dJT ++=
αα
2
1
1
2´2
´1
ZZ
TT
==αα
de manera que, los circuitos análogos mecánico y eléctrico quedan:
T1
T´1
Ω1
ΩL
T´2
Ω2 TL
i´1
i1
e1
i´2
e2
vL
iL
Figura N° 24

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
22 de 35 (Versión 25/3/06)
11.5. Transductor de traslación:
).(___BdLidf ∧= (Ley de Ampere, Figura N°25a)
BLif ..=
)(___BvdLde ∧= • (Ley de Faraday, Figura N°25b)
( ) vLB
dxxLBde ....
==
ve
ifLB ==∴ . (Figura N°25c) [20]
Hay intercambio de energía eléctrica y mecánica pues f.v = e.i Ej.: “Pick up” de los viejos fonógrafos (“tocadiscos”).
Figura N° 25
11.6. Transductor de rotación
iLBf ..= NDiLBT .2.2
...= con N igual a Nº de espiras, 2 lados (Figura N°26a)
NDLBNvLBe .2.2
....2... Ω== Ω
==∴e
iTDLBN ... (Figura N°26b) [21]
También hay transferencia de energía mecánica y eléctrica. Ej.: Instrumentos de bobina móvil.

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
23 de 35 (Versión 25/3/06)
Figura N° 26
11.7. Caso particular: Máquina de rotación de corriente continua
Figura N° 27
Ω= ..φKe iKT ..φ=
iTeK =
Ω=∴ φ [22]

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
24 de 35 (Versión 25/3/06)
12. Problemas resueltos 12.1. Problema N°1 Plantear las ecuaciones que representan el sistema mecánico de la Figura N° 28 (a).
Figura N° 28
m1.g f(t)
v1
m2.gm1 m2
Figura N° 29
Primeramente se establece el circuito electromecánico según la Figura N° 29. Luego si se aplica el método de nodos se tiene:
gmtfvpkv
pkpm 12
111
1112 )(.B.BB
:1 nodo
+=⎟⎟⎠
⎞⎜⎜⎝
⎛+−⎟⎟
⎠
⎞⎜⎜⎝
⎛+++
gmvpk
pkpmv
pk
221
12
211
1 .B.B
:2 nodo
=⎟⎟⎠
⎞⎜⎜⎝
⎛++++⎟⎟
⎠
⎞⎜⎜⎝
⎛+−
Si se tuviera una fuente de velocidad se la debe convertir a fuente de fuerza para aplicar el método de nodos.

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
25 de 35 (Versión 25/3/06)
Estas ecuaciones son íntegro - diferenciales (pues aparecen p y 1/p). 12.2. Problema N°2 Establecer el circuito electromecánico del fonocaptor de tocadiscos (“pick up”) representado en la Figura N° 30.
Figura N° 30(a)
Detalle:
Figura N° 31 (b)
La púa se mueve por el disco y constituye una fuente de velocidad v(t). A través de k2 mueve la bobina respecto al imán permanente. Aparece una f.e.m. y circula una corriente
Pua
v3
B3
v

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
26 de 35 (Versión 25/3/06)
i. Esta corriente reacciona con B dando una fuerza f en sentido contrario al movimiento. Es un transductor de traslación; por ello el “transformador” en el modelo circuital. Los elementos elásticos y de amortiguación se han dibujado según el método de los nodos (estos elementos pasivos son lineales y se puede aplicar superposición si hace falta). Las masas tienen cada una, una velocidad v, ellas serán los nodos del sistema (v1, v2. v3 y 0, el último de “referencia”). Las fuentes de fuerza son: m1g: Peso de la púa. Esta fuerza impide que la púa se separe del surco. Va aplicada entre v1 y 0. m3g: Peso del imán, consecuencia de su montaje no rígido. Va aplicado entre v3 y 0. Con estos elementos ya es posible construir el circuito electromecánico como se muestra en la Figura N° 32. El signo de v es arbitrario (es una “CA”); luego debe entrar por el signo “+” de v.
Figura N° 32
Ahora ya se pueden plantear las ecuaciones para resolver este circuito. Las velocidades de los nodos respecto del de referencia equivalen a las tensiones de nodos. En cada nodo la sumatoria de las fuerzas debe ser cero (1º ley de Kirchoff). Habrá tantas ecuaciones de nodos como nodos independientes, es decir la cantidad de nodos sin contar el nodo de referencia, en general sería (N-1), donde N es el número total de nodos del circuito. En nuestro caso particular N=4, entonces habrá tres ecuaciones de nodos.
v2

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
27 de 35 (Versión 25/3/06)
12.3. Problema N°3 Un motor eléctrico mueve una carga mecánica según muestra el esquema de la Figura N° 33, se pide: a). Hallar el circuito electromecánico. b). Hallar el circuito eléctrico equivalente. c). La cupla que demanda la carga mecánica si se elimina el eje de transmisión y si se aplica:
1) TM=cte=Tn, con Tn cupla nominal del motor partiendo del reposo. 2) TM=según la Figura N° 34.
d). Potencia absorbida por el motor una vez establecida la velocidad. Datos: Motor: 100 HP, 3x380 V, 50Hz, η=0,9, cosϕ=0,95, n=1450 rpm
JM=30kg.m2, BM=0 Eje de transmisión: KE=1000 Nm/rad, BE=0,08 Ws2, JE=0 Carga mecánica: Jc=25 kg.m2, Bc=1,0 Ws2
Figura N° 33
eje de transmisión
Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
28 de 35 (Versión 25/3/06)
Figura N° 34
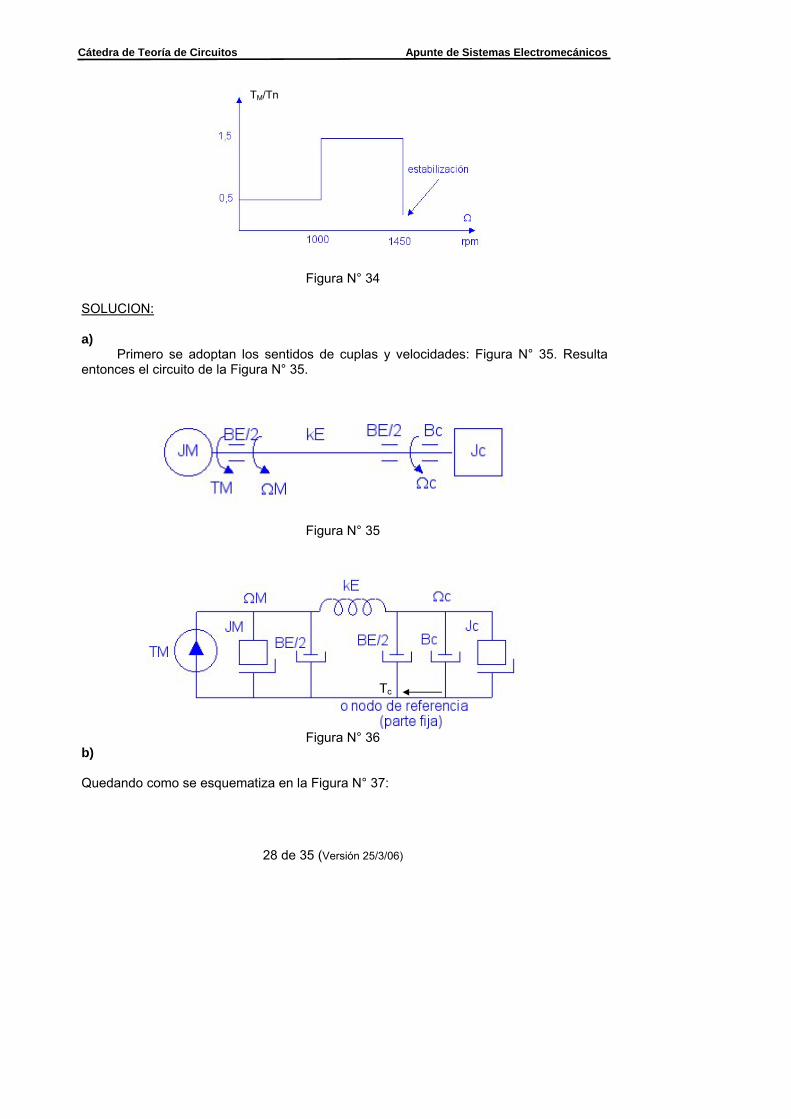
SOLUCION: a)
Primero se adoptan los sentidos de cuplas y velocidades: Figura N° 35. Resulta entonces el circuito de la Figura N° 35.
Figura N° 35
Figura N° 36 b) Quedando como se esquematiza en la Figura N° 37:
TM/Tn
Tc

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
29 de 35 (Versión 25/3/06)
Figura N° 37
siendo:
30JC MM ==
2508,02
B2R
EE ===
3101000
11 −===E
E kL
111
B1RC
C ===
25JC CC == Todo en unidades MKS. c)
Para resolver este punto debe hallarse ic, por ejemplo según el método de mallas. Este conduce a un sistema de ecuaciones diferenciales. Pero con las condiciones impuestas, el problema se simplifica considerablemente si se aplican estas simplificaciones: Quedando la Figura N°39.
Figura N° 38
Figura N° 39
C1)

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
30 de 35 (Versión 25/3/06)
cteIti ==)(
39)N (Figura °+=+=dtduC
RuiiIC
CR .
homogénea:
τ
ττ
τ
t
k.eu t-ln(k)-n(u)
.con y ,0.
−=⇒=∴−=⇒
⇒==+
∫∫ ldtudu
RCCR
udtdu
CC
particular: se ensaya con u=U=cte:
IRCIU
C . U =∴=τ
solución completa o general:
τt
k.e−
+= Uu condiciones de borde
-Uk 1.0)0( =⇒+== kUu ∴
)e1.(utτ
−−= U
ahora se puede calcular ic:
⎟⎟⎠
⎞⎜⎜⎝
⎛+==+−=+=
−−−τττ
τ
ttt
e1...e.)e1(..1
M
C
CC
CC
CC C
CRUUC
RU
dtduCu
Ri
o sea
⎟⎟⎠
⎞⎜⎜⎝
⎛+Ω=
−τt
e1..M
CnCC J
JBT
reemplazando valores:

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
31 de 35 (Versión 25/3/06)
Figura N° 40
Nmsrad
HPWHPPT
T
sradnf
nM
C
mecn
491/152
/746.10055s25)1.(302530C
31) (figura e30251.152.1
152601450..2
60..2..2
55t
≅=Ω
=
=+=⇒+=
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
≅===Ω
−
τ
πππ
C2) La curva mostrada en la Figura N° 40 corresponde aproximadamente a la curva cupla - velocidad de un motor asincrónico real. La solución es análoga a la anterior, pero teniendo en cuenta los límites de validez de las Ω. La cupla motora final es TM=Bc . Ωn=152 N.m . d)
Como )0dtdv o( 0
dtdu
== cuando se estabiliza la velocidad, la ecuación diferencial
queda:
kWPPkWB
Ruu
RuuiP
RuiI
MabsorbidaC
CCnMM
CR
7,259,01,231.231.152.
..
22
2
===∴==Ω⇒
===⇒==
η
13. Problemas propuestos 1) Un motor eléctrico acciona un peso y contrapeso según el esquema de la Figura N°
41, se pide: 2) 1. Determinar los esquemas mecánico y eléctrico según la analogía directa o de nodos. 2. Calcular la cupla y la potencia necesarias en el eje del motor en régimen permanente. Datos:
Tacel
Tn=TM

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
32 de 35 (Versión 25/3/06)
2
M m.kg2J = rpmnn 1000=
dientes 10Z1 = dientes 200Z1 =
2M W.s1,0B =
2A W.s50B =
m2,0r = kg500m1 = kgm 3002 =
Figura N° 41
3) Un motor de combustión interna tiene su pistón desplazándose según x=l/2.sen(ΩE.t),
y mueve una carga de momento de inercia JC, imponiendo una velocidad angular ΩE=cte. El esquema del dispositivo se muestra en la Figura N° 42.

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
33 de 35 (Versión 25/3/06)
Figura N° 42
Determinar: a) Esquema electromecánico equivalente según la analogía directa. Poner en evidencia
que el mecanismo biela - manivela obliga a colocar un transformador de relación de transformación variable con el tiempo a=a(t), y que ello, a su vez, conduce a ecuaciones diferenciales de coeficientes variables.
b) La velocidad de régimen permanente del volante cuando nE=1000rpm si:
1) ∞=Ek 2) radNmkE /103=
14. BIBLIOGRAFIA 1) “Conversión de la Energía Electromecánica” de V. Gourishankar (P18072). 2) “Teoría de Sistemas y Circuitos” de Gerez Murray Lasso. 3) “Manual de uso del programa utilitario PSPICE”.

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
34 de 35 (Versión 25/3/06)
15. Tabla de Contenidos SISTEMAS ELECTROMECANICOS ...........................................................................................................................1
1. INTRODUCCIÓN...................................................................................................................................................1
2. CLASIFICACIÓN DE SISTEMA .........................................................................................................................1
2.1. UNA REPRESENTACIÓN ESQUEMÁTICA ..................................................................................................................1 2.2. SISTEMAS CONTINUOS O DISCRETOS ......................................................................................................................1 2.3. SISTEMAS VARIANTES O INVARIANTES CON EL TIEMPO..........................................................................................1 2.4. SISTEMAS LINEALES O NO LINEALES ......................................................................................................................2 2.5. SISTEMAS DE PARÁMETROS CONCENTRADOS O DISTRIBUIDOS...............................................................................2 2.6. MODELOS ..............................................................................................................................................................2
3. REVISIÓN DE LA REPRESENTACIÓN DE SISTEMAS ELÉCTRICOS......................................................2
3.1. RESISTENCIA .........................................................................................................................................................2 3.2. INDUCTANCIA........................................................................................................................................................2 3.3. CAPACITOR............................................................................................................................................................3 3.4. FUENTES INDEPENDIENTES ....................................................................................................................................4 3.5. FUENTES DEPENDIENTES O CONTROLADAS ............................................................................................................4
4. ANALOGÍAS ENTRE SISTEMAS DE DISTINTO TIPO .................................................................................4
5. REPRESENTACIÓN DE SISTEMAS MECÁNICOS.........................................................................................5
5.1. ELEMENTOS ACTIVOS ............................................................................................................................................5 5.2. ELEMENTOS PASIVOS DE DOS TERMINALES DE TRASLACIÓN..................................................................................5
5.2.1. Amortiguador:.............................................................................................................................................5 Resistencias al movimiento: ......................................................................................................................................5 5.2.2. Resorte ........................................................................................................................................................6 5.2.3. Masa: ..........................................................................................................................................................8
6. CIRCUITO ELECTROMECÁNICO....................................................................................................................8
6.1. RESUMEN COMPARATIVO ....................................................................................................................................10 6.2. POTENCIAS ..........................................................................................................................................................11 6.3. ENERGÍAS ............................................................................................................................................................11
7. ELEMENTOS PASIVOS DE DOS TERMINALES DE ROTACIÓN.............................................................11
7.1. AMORTIGUADOR ROTATORIO ..............................................................................................................................11 7.2. RESORTE TORSIONAL:..........................................................................................................................................12 7.3. VOLANTE.............................................................................................................................................................13 7.4. ECUACIONES DINÁMICAS.....................................................................................................................................13
8. RELACIONES CIRCUITALES ..........................................................................................................................14
8.1. IMPEDANCIA:.......................................................................................................................................................14 8.1.1. Traslación: ................................................................................................................................................14 8.1.2. Rotación: ...................................................................................................................................................14
9. LEYES DE KIRCHOFF.......................................................................................................................................16
10. VARIABLES DE ESTADO..................................................................................................................................16
10.1. EJEMPLO INTRODUCTORIO ..............................................................................................................................17
11. ELEMENTOS PASIVOS DE 4 TERMINALES ................................................................................................19
11.1. PALANCA DE TRASLACIÓN ..............................................................................................................................19 11.2. TORNO DE TRASLACIÓN- ROTACIÓN ...............................................................................................................20 11.3. ENGRANAJES IDEALES (J=B=0) ......................................................................................................................20 TRANSFORMADOR ANÁLOGO ........................................................................................................................................20 11.4. ENGRANAJE NO IDEAL ....................................................................................................................................21 11.5. TRANSDUCTOR DE TRASLACIÓN: ....................................................................................................................22

Cátedra de Teoría de Circuitos Apunte de Sistemas Electromecánicos
35 de 35 (Versión 25/3/06)
11.6. TRANSDUCTOR DE ROTACIÓN .........................................................................................................................22 11.7. CASO PARTICULAR: MÁQUINA DE ROTACIÓN DE CORRIENTE CONTINUA ........................................................23
12. PROBLEMAS RESUELTOS...............................................................................................................................24
12.1. PROBLEMA N°1 ..............................................................................................................................................24 12.2. PROBLEMA N°2 ..............................................................................................................................................25 12.3. PROBLEMA N°3 ..............................................................................................................................................27
13. PROBLEMAS PROPUESTOS ............................................................................................................................31
14. BIBLIOGRAFIA ...................................................................................................................................................33
15. TABLA DE CONTENIDOS.................................................................................................................................34