sistemi di equazioni differenziali - giorgio.busoni.it · sistemi di equazioni differenziali ......
TRANSCRIPT

Sistemi di Equazioni Differenziali Nota introduttiva: Lo scopo di queste dispense non è trattare la teoria riguardo ai sistemi di equazioni differenziali, ma solo dare un metodo risolutivo pratico utilizzabile negli esercizi che richiedono di risolvere dei sistemi di equazioni differenziali lineari.
Introduzione Un sistemi di equazioni differenziali nxn è un insieme di n equazioni differenziali lineari con n funzioni incognite. Siccome ogni sistemi di questo tipo può essere ricondotto a un sistema in cui compaiono solo equazioni lineari di primo ordine,dovendo magari però aumentare la dimensione del sistema con sostituzioni del tipo
𝑓′ = 𝑔
Scegliamo di trattare solo sistemi di questo tipo, in quanto sono i più facili da trattare e risolvere.
Sistemi di Equazioni lineari e sistemi di equazioni non lineari Nei casi in cui il sistema non è lineare non si può operare la sopracitata sostituzione per ridurre le equazioni di ordine. Non ci occuperemo di tali sistemi, daremo solo delle nozioni per studiare sistemi non lineari di primo ordine localmente.
Sistemi di Equazioni a coefficienti costanti La classe dei sistemi di cui ci occuperemo è quella di sistemi di equazioni che contengono solo equazioni a coefficienti costanti, che possono essere cioè scritti in forma matriciale come
�̇� = 𝐴𝑋 + 𝐵
Dove A è una matrice nxn e B è un vettore. Un sistema non lineare può essere approssimato localmente a un sistema lineare di questo tipo.
Sistemi Omogenei e Non Omogenei Il sistema viene definito omogeneo nel caso in cui B=0.
Metodo risolutivo
Passo A: Diagonalizzare il sistema 1)Si trovano gli autovalori della matrice A risolvendo (𝐼 è la matrice identità, 𝜇 l’autovalore incognito)
𝐷𝑒𝑡(𝐴 − 𝜇𝐼) = 0
2)Per ogni autovalore reale con molteplicità algebrica maggiore di 1 si trova la dimensione degli auto spazi

3)Detti
𝜇𝑖 𝑔𝑙𝑖 𝑎𝑢𝑡𝑜𝑣𝑎𝑙𝑜𝑟𝑖
𝑛𝑖 𝑙𝑎 𝑑𝑖𝑚𝑒𝑛𝑠𝑖𝑜𝑛𝑒 𝑑𝑒𝑙𝑙′𝑎𝑢𝑡𝑜𝑠𝑝𝑎𝑧𝑖𝑜𝑎𝑠𝑠𝑜𝑐𝑖𝑎𝑡𝑜 𝑎 𝜇𝑖
𝑠 𝑖𝑙 𝑛𝑢𝑚𝑒𝑟𝑜 𝑑𝑒𝑙𝑙𝑒 𝑐𝑜𝑝𝑝𝑖𝑒 𝑑𝑖 𝑎𝑢𝑡𝑜𝑣𝑎𝑙𝑜𝑟𝑖 𝑐𝑜𝑚𝑝𝑙𝑒𝑠𝑠𝑖
𝑘 𝑖𝑙 𝑛𝑢𝑚𝑒𝑟𝑜 𝑑𝑒𝑔𝑙𝑖 𝑎𝑢𝑡𝑜𝑣𝑎𝑙𝑜𝑟𝑖 𝑟𝑒𝑎𝑙𝑖
Esisterà una base in cui la matrice ha assume la forma:
⎝
⎜⎜⎜⎜⎛
𝐽(𝜇1,𝑛1) 0 00 … 00 0 𝐽(𝜇𝑘 ,𝑛𝑘)
0
0
𝑅𝑒[𝜇𝑘+1] −𝐼𝑚[𝜇𝑘+1]𝐼𝑚[𝜇𝑘+1] 𝑅𝑒[𝜇𝑘+1] 0 0
0 … 0
0 0 𝑅𝑒[𝜇𝑘+𝑠] −𝐼𝑚[𝜇𝑘+𝑠]𝐼𝑚[𝜇𝑘+𝑠] 𝑅𝑒[𝜇𝑘+𝑠] ⎠
⎟⎟⎟⎟⎞
Per ogni auto valore bisognerà trovare l’autospazio e una base dell’autospazio, per poi scrivere le matrici di cambiamento di base
𝑀: 𝐵1 → 𝐵0 ; 𝐵0𝑒 𝑀−1:→ 𝐵1
NOTA: la matrice M sarà composta dai vettori delle basi degli auto spazi.
A questo punto bisogna solo imparare a risolvere sistemi del tipo
𝑋 =̇ 𝐽(𝜇,𝑛)𝑋 + 𝐵′
NOTA: B’ è il trasformato di B nella nuova base
Passo B: Trovare la soluzione del sistema Risoluzione dei Blocchi di Jordan
Caso n=1:
è banale, si tratta di una equazione differenziale lineare del primo ordine, l’integrazione è immediata
Caso n=2:
�̇� = �𝜇 10 𝜇�𝑋 + 𝐵′
L’integrazione della seconda equazione è immediata, dopodiché si va a sostituire la prima funzione nella prima equazione e si integra anche quella. Lo stesso procedimento ricorsivo può essere adottato per n qualsiasi.
Risoluzione dei Blocchi 2x2 legati a auto valori complessi
La matrice 2x2 può essere anche scritta così:

�𝑅𝑒[𝜇] −𝐼𝑚[𝜇]
𝐼𝑚[𝜇] 𝑅𝑒[𝜇] � = 𝜌 �𝐶𝑜𝑠𝛼 −𝑆𝑒𝑛𝛼𝑆𝑒𝑛𝛼 𝐶𝑜𝑠𝛼 �
Se in questo sistema B’=0 (caso omogeneo) si può passare in coordinate Polari e il sistema diventa
�𝑥𝑦� = 𝜌 �𝐶𝑜𝑠𝜃𝑆𝑒𝑛𝜃�
��̇��̇�� = �𝐶𝑜𝑠𝛼 0
0 0� �𝜌𝜃�+ � 0
𝑆𝑒𝑛𝛼�
Le due equazioni sono già disaccoppiate e sono direttamente integrabili. Per trovare la soluzioni nel caso non omogeneo si procede derivando la seconda equazione e andando a sostituire nella prima (o viceversa), per esempio, se:
𝐵 = �𝑓(𝑡)𝑔(𝑡)�
�̈� = 𝜌𝐶𝑜𝑠𝛼�̇� + 𝜌𝑆𝑒𝑛𝛼�̇� + 𝑔′(𝑡)
�̇� = 𝜌𝐶𝑜𝑠𝛼𝑦 + 𝜌𝑆𝑒𝑛𝛼𝑥 + 𝑔(𝑡)
E otteniamo
�̈� − 2𝜌𝐶𝑜𝑠𝛼�̇� + 𝜌2𝑦 = 𝑔′(𝑡) − 𝜌𝐶𝑜𝑠𝛼𝑔(𝑡) + 2𝜌𝑆𝑒𝑛𝛼𝑓(𝑡)
Si trovano le soluzioni col metodo di variazione delle costanti e quindi si va a sostituire y nella prima equazione ottenendo una equazione lineare del primo ordine per x.
NOTA: una volta risolta il sistema nella nuova base, per ottenere le soluzioni nella base di partenza basta fare un cambio di base moltiplicando il vettore soluzione per la matrice M
Sistemi di Equazioni non lineari Nel caso di sistemi non lineari si può risolvere localmente il sistema con il seguente teorema:
TEO: un sistema non lineare, nei punti in cui si annulla il gradiente (e quindi le derivate di tutte le funzioni), è equivalente al sistema dove al posto delle funzioni sostituiamo le loro serie di Taylor troncate dopo il primo ordine non nullo.
OSS: se il primo ordine non nullo è il 2°, il punto sarà di massimo, minimo o di sella a seconda dell’Hessiano.
OSS: per essere di massimo o di minimo il primo ordine non nullo deve essere necessariamente pari.

Classificazione Sistemi 2x2 Nel caso di sistemi 2x2 la classificazione è abbastanza semplice in quanto la matrice può avere solo 3 possibili forme canoniche: due blocchi di Jordan di dim=1, 1 blocco di dim=2 oppure un blocco 2x2 di due autovalori complessi.
Grafico della classificazione
CASO 1: 2 Blocchi di J di dim=1
• Entrambi gli auto valori Positivi: Nodo Instabile • Entrambi gli auto valori negativi: Nodo Stabile • Auto valori di segno opposto: sella
CASO 2: 1 Blocco di J di dim=2
• Nodo Improprio
CASO 3: 1 Blocco 2x2 associato ad auto valori Complessi
• Gli auto valori hanno parte reale positiva: Fuoco Instabile • Gli auto valori hanno parte reale negativa: Fuoco Stabile • Gli auto valori sono immaginari puri: Centri

Grafici sul Piano delle Fasi
Nodo: l’equazione è del tipo:
𝑦(𝑡) = 𝑦(0)�𝑥(𝑡)𝑥(0)�
𝜇2𝜇1
Gli auto vettori coincidono con la retta tangente a tutte le curve (𝑦 = 𝑦(0)) e alla sua perpendicolare (𝑥 = 𝑥(0)). Nel nodo stabile all’aumentare di t il punto si sposta verso il nodo (origine). Nel nodo instabile invece si allontana.

Sella: l’equazione è sempre del tipo
𝑦(𝑡) = 𝑦(0)�𝑥(𝑡)𝑥(0)�
𝜇2𝜇1
Ma ora l’esponente della x risulta negativo
Glia auto vettori coincidono con gli asindoti.

Nodo Improprio: l’equazione è del tipo
𝑦(𝑡) =𝑦(0)𝑥(0) 𝑥
(𝑡) +1𝜇𝑥(𝑡) ln�
𝑥(𝑡)𝑥(0)�
L’unico auto vettore è la retta tangente a tutte le curve (𝑥 = 𝑥(0)). Se l’auto valore è positivo il nodo è instabile e il punto si allontana dall’origine col passare del tempo. Se invece è negativo il punto di avvicina col passare del tempo.

Fuoco: L’equazione (Polare) è del tipo
𝜌(𝑡) = 𝜌(0)𝑒𝑡𝑔(𝜃(𝑡)−𝜃(0))
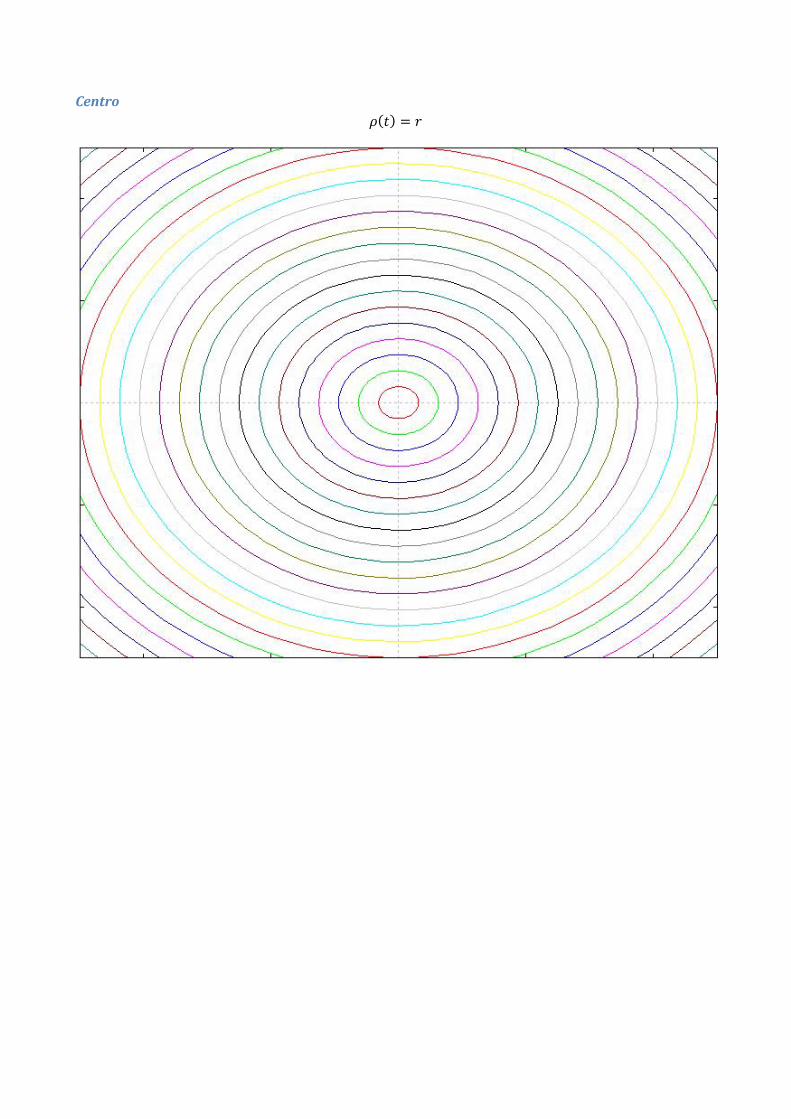
Centro 𝜌(𝑡) = 𝑟

Esempi pratici
Punti critici del pendolo semplice Il pendolo semplice soddisfa l’equazione
�̈� = −𝑔𝑙𝑠𝑒𝑛𝜃
Che può essere trasformata in un sistema con la sostituzione
�̇� = 𝜔
Ottenendo
��̇� = −𝑔𝑙𝑠𝑒𝑛𝜃
�̇� = 𝜔
Il gradiente si annulla nei punti
�𝜃 = 𝑛𝜋𝜔 = 0
Caso 1: 𝑛 pari
��̇� = −𝑔𝑙𝜃
�̇� = 𝜔
È omogeneo e
𝐴 = �0 −𝑔𝑙
1 0�
Gli autovalori sono complessi coniugati e immaginari puri, abbiamo un centro (il che significa che le oscillazioni sono armoniche).
Caso 2: 𝑛 dispari
��̇� = +𝑔𝑙𝜃
�̇� = 𝜔
È omogeneo e
𝐴 = �0 +𝑔𝑙
1 0�
Gli autovalori sono reali, uguali in valore assoluto, ma di segno opposto.
Abbiamo quindi una sella, segno che è un punto instabile.

Punti critici del pendolo semplice smorzato Il pendolo semplice soddisfa l’equazione
�̈� = −𝛾�̇� −𝑔𝑙𝑠𝑒𝑛𝜃
Che può essere trasformata in un sistema con la sostituzione
�̇� = 𝜔
Ottenendo
��̇� = −𝛾𝜔 −𝑔𝑙𝑠𝑒𝑛𝜃
�̇� = 𝜔
Il gradiente si annulla nei punti
�𝜃 = 𝑛𝜋𝜔 = 0
Caso 1: 𝑛 pari
��̇� = −𝛾𝜔 −𝑔𝑙𝜃
�̇� = 𝜔
È omogeneo e
𝐴 = �−𝛾 −𝑔𝑙
1 0�
Gli autovalori sono complessi coniugati e la traccia è negativa, abbiamo quindi o un fuoco o un nodo (proprio o improprio) stabili, a seconda se 𝛾2 > 4 𝑔
𝑙 (nodo proprio), 𝛾2 = 4 𝑔
𝑙 (nodo improprio) o 𝛾2 < 4 𝑔
𝑙
fuoco. I tre casi corrispondono allo smorzamento forte, smorzamento critico o a oscillazioni smorzate.
Caso 2: 𝑛 dispari
��̇� = −𝛾 +𝑔𝑙𝜃
�̇� = 𝜔
È omogeneo e
𝐴 = �−𝛾 +𝑔𝑙
1 0�
Gli autovalori sono reali, di segno opposto, quindi abbiamo quindi una sella, segno che è un punto instabile.

Punti Lagrangiani I punti lagrangiani sono 5 punti stabili nel problema dei 3 corpi.
Di seguito diamo i sistemi linearizzati approssimati numericamente nei vari punti nel caso 𝑚2𝑚1
= 0.02
L1
𝐴 = �−11.9947 00 4.46734�
Sella, punto equilibrio instabile.
L2
𝐴 = �−7.28173 00 2.11086�
Sella, punto equilibrio instabile.
L3
𝐴 = �−3.09531 00 0.0176571
�
Sella, punto equilibrio instabile.
L4, L5
𝐴 = � −0.765 −1.27306−1.27306 −2.295
�
Che ha autovalori
𝜇 = −3.01523;−0.0447715
E quindi è un punto (nodo) stabile.