sliding mode control of wind energy generation systems using pmsg and input-output linearization...
TRANSCRIPT
Sliding Mode Control of Wind Energy Generation Systems Using PMSG and Input-Output Linearization
Xiangjun Li, Wei Xu, Xinghuo Yu and Yong Feng RMIT University, Australia

Platform Technologies Research Institute 2
Outline
Background.
Introduction to PMSG.
Input-output linearization.
SMC design.
Simulation studies.

Platform Technologies Research Institute 3
Background
We need the energy supply to be sustainable!!!
Platform Technologies Research Institute 4
Background
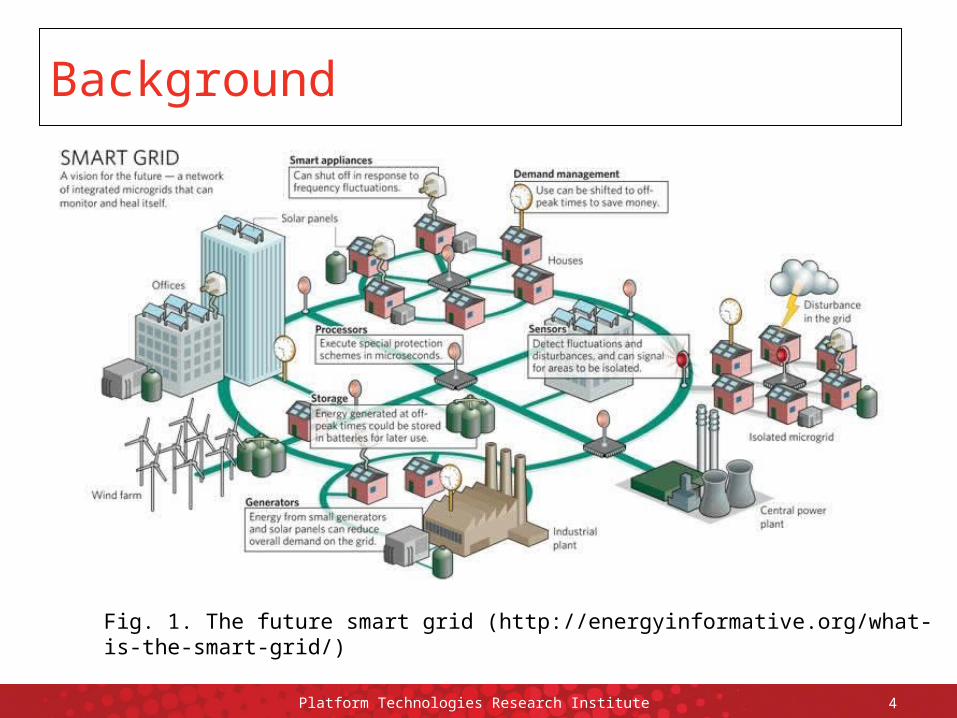
Fig. 1. The future smart grid (http://energyinformative.org/what-is-the-smart-grid/)

Platform Technologies Research Institute 5
Background
Fig. 2. The installed capacity of wind generation.

Platform Technologies Research Institute 6
Background
Several factors have made wind power generation cost competitive:
The improvement of aerodynamic efficiency of wind turbine;
The potential market and government incentives;
New control schemes for the variable-speed wind turbine which allow the optimization of wind turbine performance.
Platform Technologies Research Institute 7
Background
Constant speed system. Require sturdy mechanical design; Require stiff power grid.
Variable speed wind energy generation. Is able to optimize wind energy absorption; Smooth power output.

Platform Technologies Research Institute 8
PMSG
Fig. 3. The rationale and structure of PMSG.
Magnetic induction of
electric current
Force on current
carrying lines

Platform Technologies Research Institute 9
PMSG
Fig. 4. Mechanical configurations.
Platform Technologies Research Institute 10
PMSG
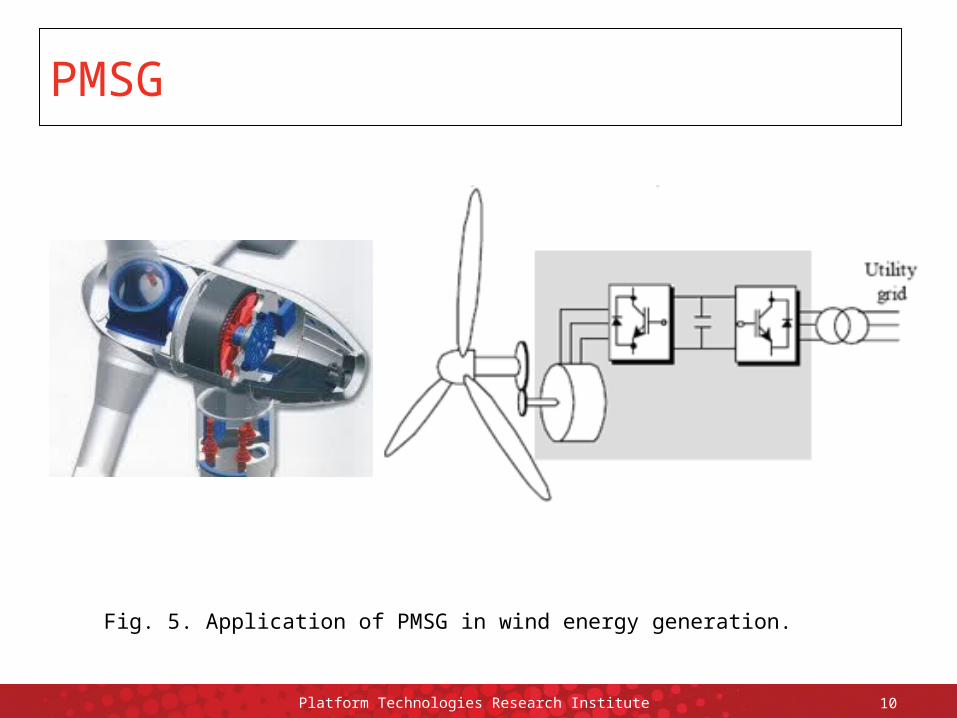
Fig. 5. Application of PMSG in wind energy generation.

Platform Technologies Research Institute 11
PMSG
Permanent magnetic synchronous generator is a type of generator in which the excitation field is generated by permanent magnet;
The mechanical frequency matches the required electrical frequency.
PMSG requires less parts than other generators such as induction generator. Thus, it is more mechanically reliable.
PMSG is widely used in wind energy generation and hydro electricity generation.

Platform Technologies Research Institute 12
PMSG
By field orientation control (FOC), it can operate the optimal working point and minimize the losses in generator and power electronic circuit;
The use of a multi pole synchronous generator (large diameter synchronous ring generator) can give direct drive function without a gearbox;
Higher efficiency for no additional power supply for the magnet field excitation;
Higher reliability due to the absence of mechanical components such as slip rings, lighter and therefore higher power to weight ratio.
Platform Technologies Research Institute 13
PMSG
The control schemes depend on the accurate generator parameter, which vary with temperature and frequency;
The permanent may increase the price of machine and meet with demagnetization phenomenon;
The power factor of machine cannot be adjusted easily.

Platform Technologies Research Institute 14
PMSG
Fig. 6. The electrical configuration of the PMSG.

Platform Technologies Research Institute 15
Problem Description
m
opt
windP
mdV
mqV mdV
mqi
mqV
mdi
mdU mqU DCV
ndV
nqi
nqV
ndi
ndU nqU
_grid dV
_grid qV
Fig. 7. Signal flow chart of the system.
Platform Technologies Research Institute 16
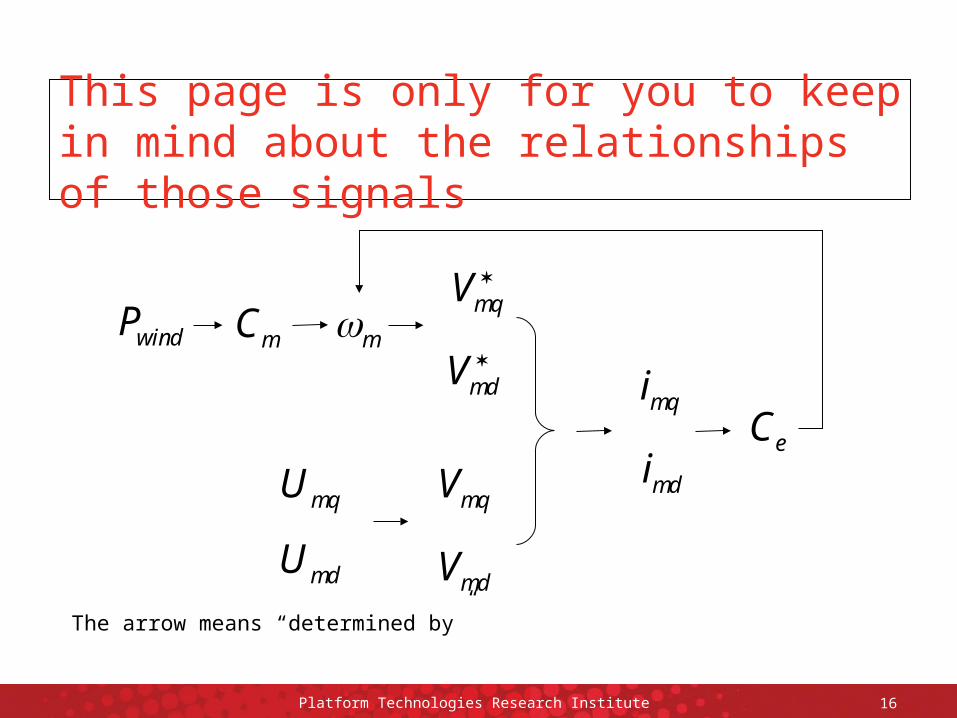
This page is only for you to keep in mind about the relationships of those signals
mdV
mqV
mmCwindP
mdV
mqVmqU
mdU
mdi
mqi
The arrow means “determined by”
eC

Platform Technologies Research Institute 17
Problem Description
31( , )
2 w pP AV c
2 0.1710.022 5.6
2pc e
2.237 m
mec
V
2.237
11.48opt
V p opt mecp
Wind power intensity
Mechanical power of wind turbine
Performance coefficient
Tip speed ratio
Optimal angular frequency

Platform Technologies Research Institute 18
Problem Description
md s md sd md e sq mqv R i L i L i
'e m e
JC C
p
/m mecC P
PMSG model
mq s mq sq mq e sd md e pv R i L i L i
Electrical:
Mechanical:
( )e sq sq md mq mq pC p L L i i i
Platform Technologies Research Institute 19
Problem Description
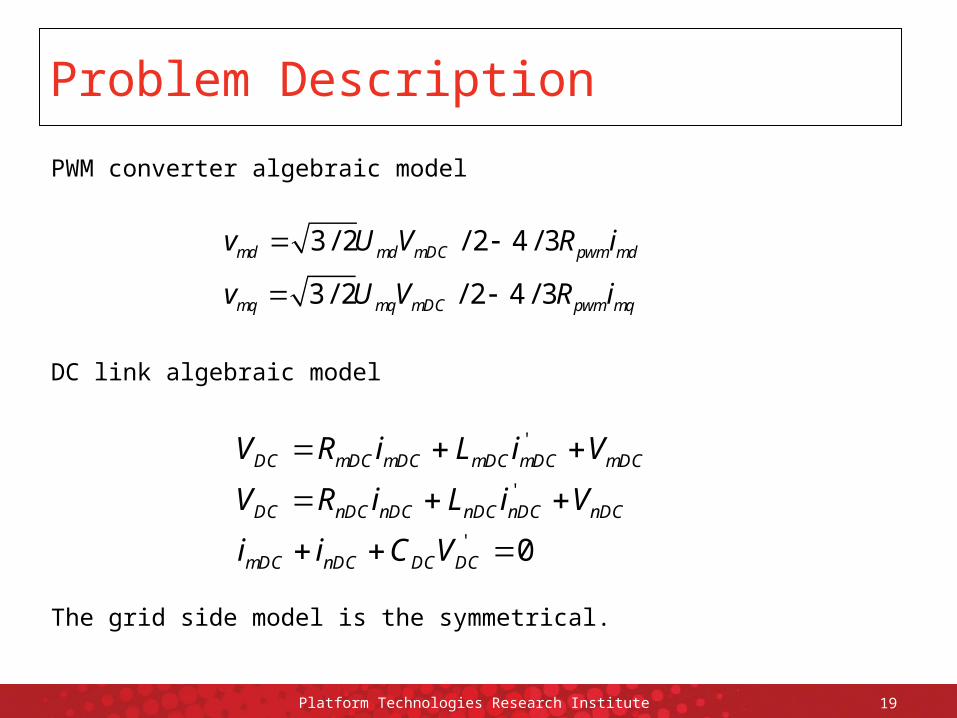
3 / 2 / 2 4 / 3
3 / 2 / 2 4 / 3
md md mDC pwm md
mq mq mDC pwm mq
v U V R i
v U V R i
'
'
' 0
DC mDC mDC mDC mDC mDC
DC nDC nDC nDC nDC nDC
mDC nDC DC DC
V R i L i V
V R i L i V
i i C V
PWM converter algebraic model
DC link algebraic model
The grid side model is the symmetrical.
Platform Technologies Research Institute 20
Problem Description
( ) ( )
( )
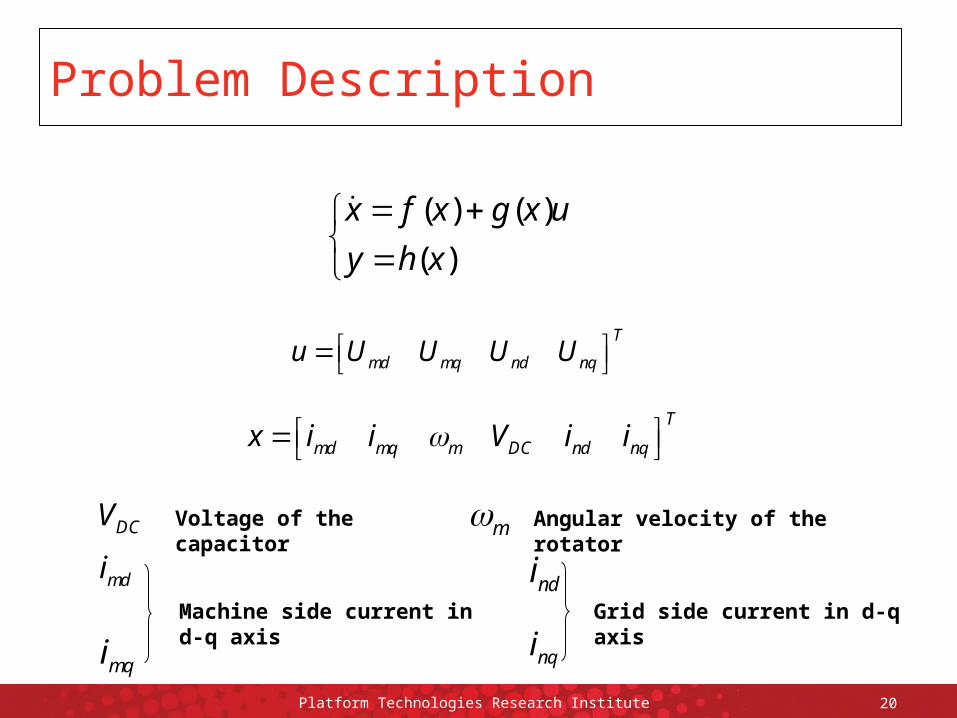
x f x g x u
y h x
T
md mq nd nqu U U U U
T
md mq m DC nd nqx i i V i i
mdi
mqi
ndi
nqi
mDCV Voltage of the capacitor Angular velocity of the rotator
Machine side current in d-q axis Grid side current in d-q axis

Platform Technologies Research Institute 21
Problem Description
2
( )0
m md m mq mq md
m mq m md md m p mq
sq sd md mq mq p m
nd nq pccd
nd nd
R i L i L
R i L i L
p L L i i i J pC Jf x
Ri Li v L
Ri Li L
0 0 0
0 0 0
0 0 0 0( )
0 0 0
0 0 0
DC md
DC mq
md DC mq DC nd DC nq DC
DC
DC
V L
V L
g xi C i C i C i C
V L
V L
1 2 3 4( ) ( ) ( )( () )T
m md nq
T
DC
h x h x h x h xh x
i i V
,

Platform Technologies Research Institute 22
PMSG
Parameter Description Value
Rated generator power 2MW
Rated generator voltage 4kV
Number of pole pairs 11
Moment of inertia 2.525*106kgm2
PM flux 166.8Wb
Stator d-axis inductance 0.367H
Stator q-axis inductance 0.250H
Stator resistance 0.08
Filter inductance 33mH
Filter resistance 0.078
Inductance between grid side conv. And grid 0.0295H
Resistance between grid side conv. And grid 0.086
DC link capacitance 100
mP
mV
PJp
sdL
sqL
sR
fnL
fnR
LRDCC F

Platform Technologies Research Institute 23
Input-Output Linearization
1
2, 1( ) ( , )m f h gu fL x L L h x u
2, 2( ) ( , )md f h gui L x L h x u
3, 3( ) ( , )nq f h gui L x L h x u
4, 4( ) ( , )nq f h guV L x L h x u
1( ) ( )Nu E x T x1m v
2mdi v
3nqi v
4nqV v

Platform Technologies Research Institute 24
Uncertainty Analysis
0
0
( ) ( ) ( )
( ) ( ) ( )
f x f x f x
g x g x g x
0 0
( ) ( )
( ) ( ) ( ) ( )
i f i gu i
f i g u i f i gu i
h L h x L h x u
L h x L h x u L h x L h x
0
0 0
1 2 3 4
1 ( ) / ( )
( ) ( ) ( ) / ( )
( , , , )
i gu i g u i i
f i f i gu i g u i
i i i
h L h x L h x v
L h x L h x L h x L h x
v v v v v
1 2 3 4( , , , ) ( ) ( 2,3,4)Ti iv v v v M x V i
1 2 3 4
TV v v v v 4( )iM x i is independent of iv

Platform Technologies Research Institute 25
Uncertainty Analysis
0
0
( ) ( ) ( )
( ) ( ) ( )
f x f x f x
g x g x g x
0 0 0 0
0 0 0
0
0
0 0
0
21 1 1 1
1 1 1
21 1 1
21 1 1
21 1 1 1
1
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
(
f g u f f f
gu f f f g u f
f gu f f gu
g u gu f gu gu
f f f f f
gu f
h L h x L L h x L L h x
L L h x L L h x L L h x
L h x L L h x L L h x
L L h x L L h x L h x
v L L h x L L h x L h x
L L h x
0
0
0
1 1
1 1
21 1
) ( ) ( )
( ) ( )
( ) ( )
g u f gu f
f gu f gu
g u gu gu
L L h x L L h x
L L h x L L h x
L L h x L h x
1 1 1 1 2 3 4 1 1 1 2 3 4( , , , ) ( , , , )h v v v v v v v v v 1 1 2 3 4 1( , , , ) ( )Tv v v v M x V
1 1 2 3 4( , , , ) ( )Tv v v v V Q x V 41( )M x 4 4( )Q x

Platform Technologies Research Institute 26
SMC Design
1 2 3 4( , , , )i i i ih v v v v v
0
0
( ) ( ) ( )
( ) ( ) ( )
f x f x f x
g x g x g x
1 1 1 1 2 3 4 1 1 1 2 3 4( , , , ) ( , , , )h v v v v v v v v v
sgn( ( )) 2,3,4i i iv U h x i
1 2
2 1 2( , )
z z
z H z z bv
1 1sgn Mv U z z

Platform Technologies Research Institute 27
SMC Design
Theorem 1. System (1) can be stabilized by the control laws 1( ) ( )u E x N x
where
0
0
0
0
21 1 1
2 2
3 3
4 4
sgn( ( ) ) ( )
sgn( ( )) ( )( )
sgn( ( )) ( )
sgn( ( )) ( )
M f
f
f
f
U h x h L h x
U h x L h xN x
U h x L h x
U h x L h x
if
1
2,3,41 0
i i
i i
iU M
1 1 2 1 31,
2
2 2 1 3
2 2
2 2 1 3 2 2 1 3
1 1
, ,
1 , 1 4 0
1 1 4 1 1 4
2 2
iji j
Q a M a a
a a a a
a a a a a a a aU
a a
ijQ ij Q 1a 2a 3awhere is the th item of matrix , , , and are positive
constants.
Platform Technologies Research Institute 28
By choosing the uniform control gain for all subsystems , the coupling between them through uncertainty items can be decoupled.
After the decoupling, the stability of the overall system can be achieved by stabilizing each subsystem.
Here we only carry out the simulation study of the subsystem , which is the angular speed of the rotator. The units of the variables are unified. The angular speed and the angular acceleration are two states depicted in Figure 8 and Figure 9.
Simulation Studies:Sub-system 1( )mh
ih
1h

Platform Technologies Research Institute 29
Simulation Studies:Sub-system
Fig. 8. State trajectory of the closed-loop system.
1( )mh
Platform Technologies Research Institute 30
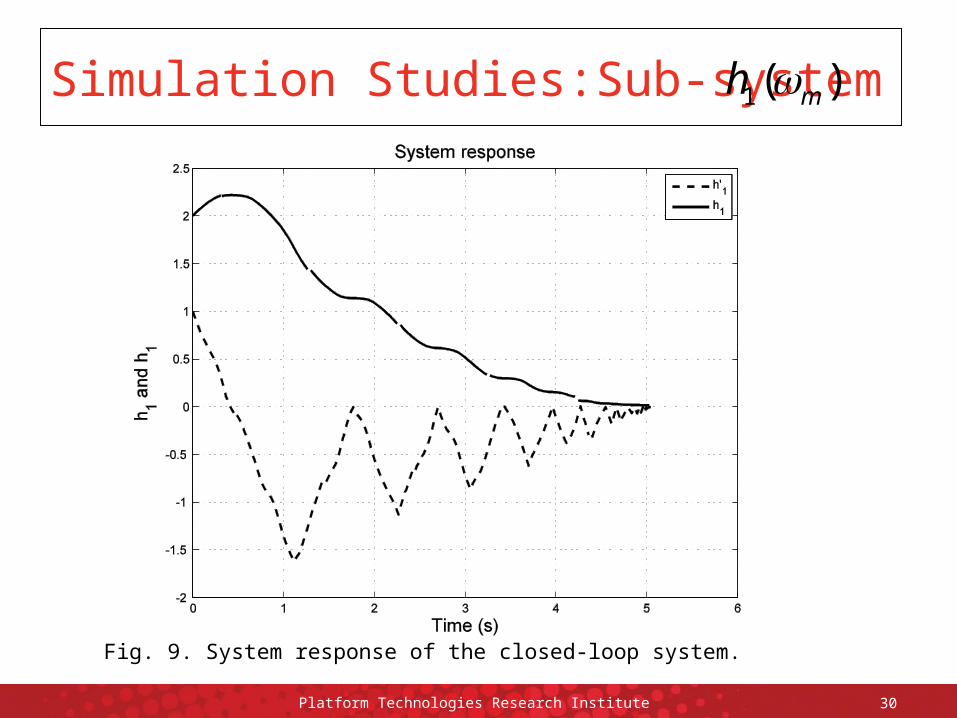
Simulation Studies:Sub-system
Fig. 9. System response of the closed-loop system.
1( )mh
Platform Technologies Research Institute 31
Conclusion
The structure of the wind energy generation system using PMSG has been introduced.
The system, which is described by mathematical model in state space, has been formulated and linearized by the input-output linearization technique.
Uncertainties are included in the modeling and linearization.
SMC controls have been designed to stabilize the system.
Simulation studies are conducted to verify the results.
Platform Technologies Research Institute 32
Thanks for your attention!
Questions please.