sscp 1143 mechanics rotation
TRANSCRIPT



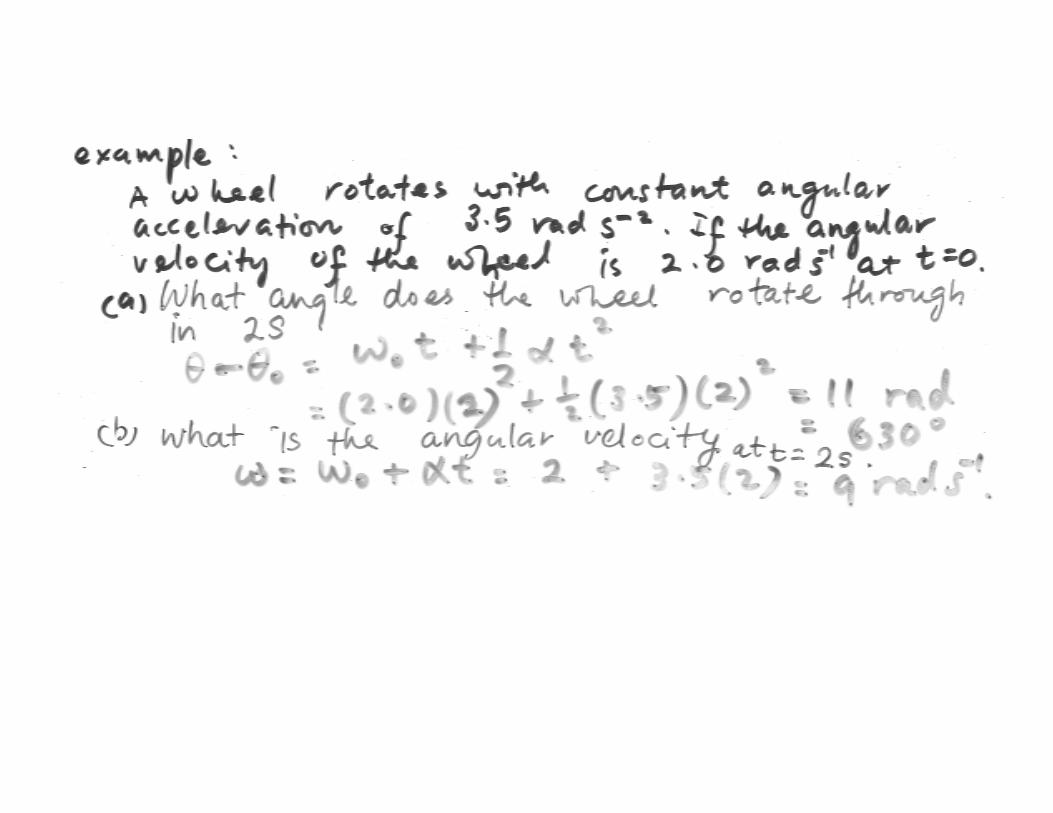
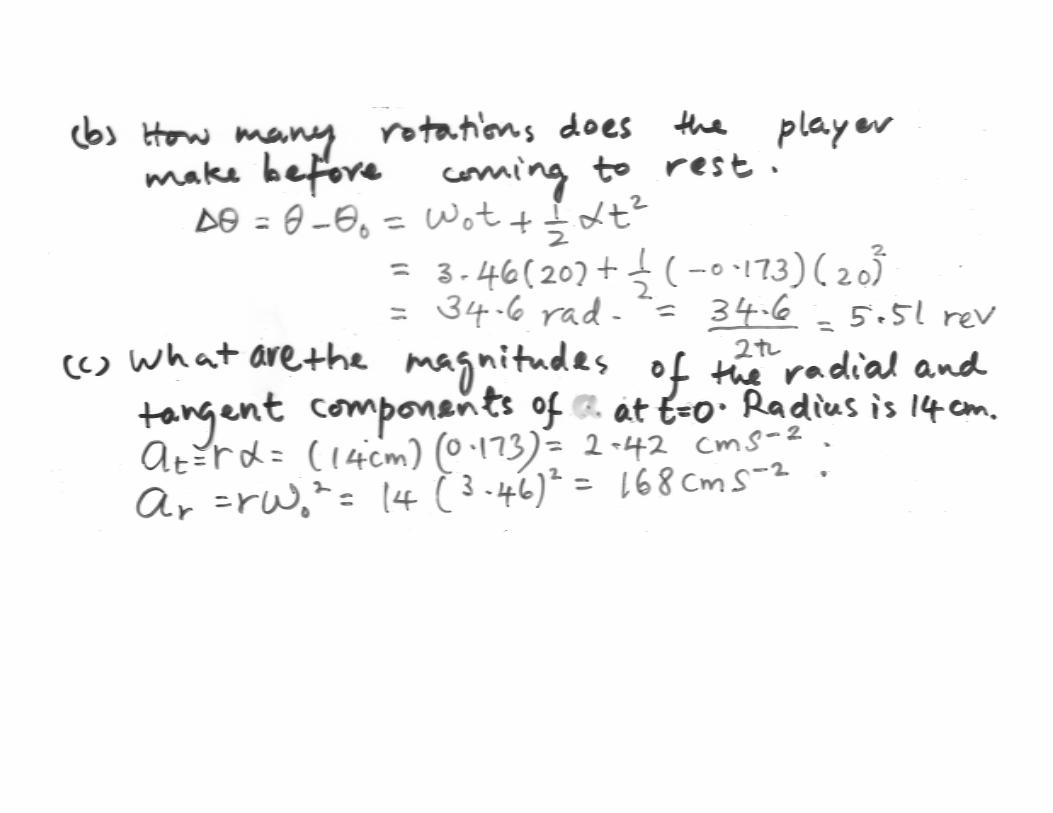
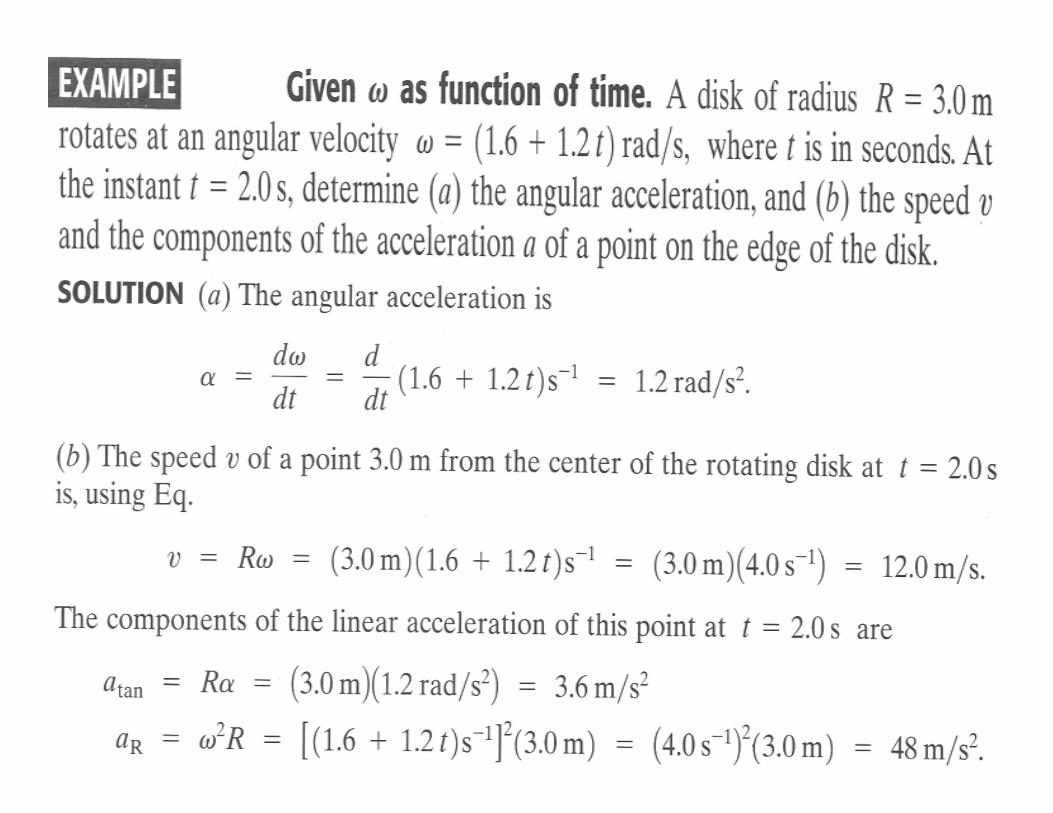
Rotation with Constant Angular Acceleration
When the angular acceleration is constant we can derive simple expressionsthat give us the angular velocity and the angular posit
αω ion as function of time
We could derive these equations in the same way we did in chapter 2 Instead weθ
We could derive these equations in the same way we did in chapter 2. Instead we will simply write the solutions by exploiting the analogy between translationaland rotational motion using the following correspondance between the two motions
Rotational Motion Translational Motion x θ↔
xv
θ↔↔
aωα↔
02
02
(eqs.1)
(eqs.2)
2
2o o o
v v at
atx x v t tt
tω ω α
αθ θ ω
= +
= + +
= +↔
↔ = + +
( ) ( )2 2 22
( q )
2
(2
2 2
o o
o oo o
o
v v xa x ω ω α θ θ− = − − = −↔ eqs.3)







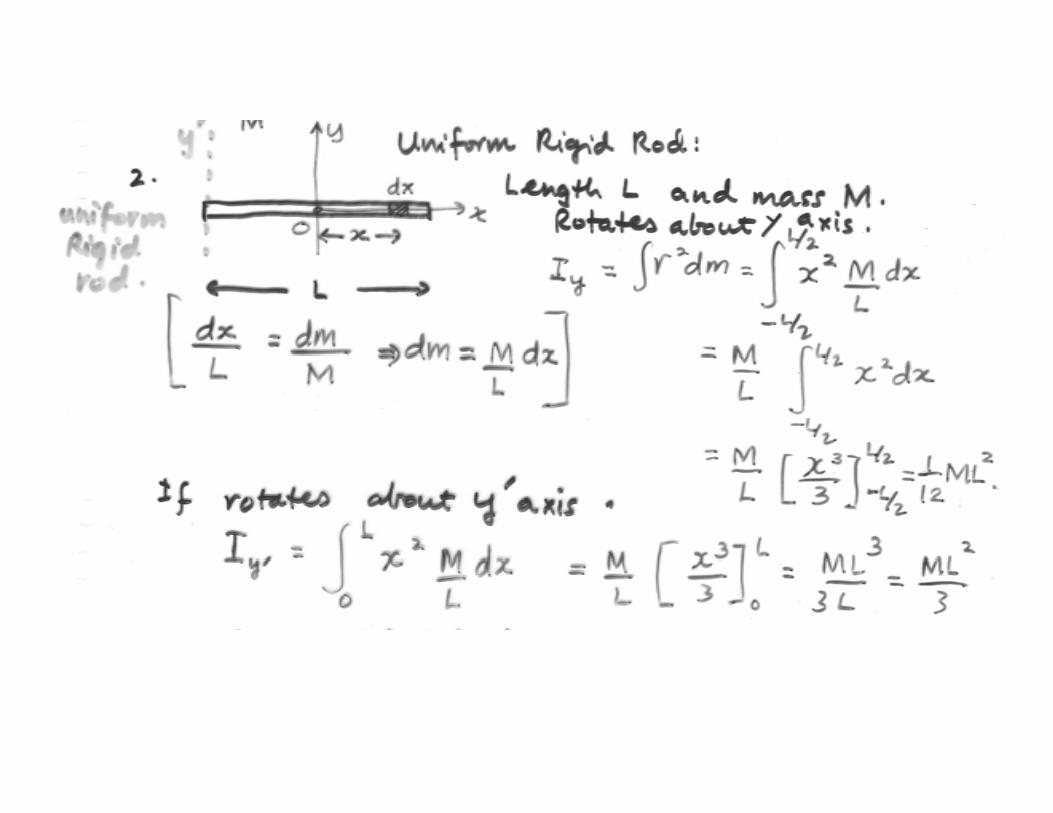


In fig.a we show a body which can rotate about an axis through
i t O d th ti f f li d t i t P di t
Torque
F point O under the action of a force applied at point P a distance
from O. In fig.b we resolve into two componets, ar dial
F
r F and tangential. The radial component cannot cause any rotationrFg p ybecause it acts along a line that passes through O. The tangentialcomponent sin on the other hand causes the rotation of the
r
tF F φ=
object about O. The ability of to rotate the body depends on themagnitude and also on the distance between points P and A.Thus we define as sitorque n
t
rF rF r F
FF r
τ φ ⊥= = =Thus we define as sitorque The distance is known a
ntrF rF r Fr
τ φ ⊥
⊥ s the and it is the
perpendicular distance between point O and the vector
moment arm
FThe algebraic sign of the torque is asigned as follows:
If a force tends to rotate an object in the coubtercF lockwise
di ti th i i iti If f t d t t tFdirection the sign is positive. If a force tends to rotate an object in the clockwise direction the sign is negative.
F
r Fτ ⊥= (10-13)

For translational motion Newton's second law connects Newton's Second Law for Rotation
the force acting on a particle with the resulting accelerationThere is a similar relationship between the torque of a forceapplied on a rigid object and the resulting angular acceleration
This equation is known as Newton's second law for rotation. We will explore q pthis law by studying a simple body which consists of a point mass at the end
of a massless rod of length . A force F is
m
r applied on the particle and rotates
the system about an axis at the origin. As we did earlier, we resolve F into a tangential and a radial component. The tangential component is responsible f th t ti W fi t l N t ' d l f ( 1)F Ffor the
( ) ( )2
rotation. We first apply Newton's second law for . (eqs.1)The torque acting on the particle is: (eqs.2) We eliminate
between equations 1 and 2:
t t t
t t
F F maF r F
ma r m r r mr I
τ τ
τ α α α
==
= = = =( ) ( )between equations 1 and 2:
tma r m r r mr Iτ α α α= = = =
(compare with: )F ma=Iτ α= (10-14)




Analogies between translational and rotational Motion
Rotational Motion Translational Motion
x θ↔
v ω↔
00
av v at t
αω ω α= + = +
↔↔ 0
2
0
2
2
2
o o o o
v v at
atx x v t
t
tt
ω ω α
αθ θ ω
+
= +
+
= +
↔
↔+ +
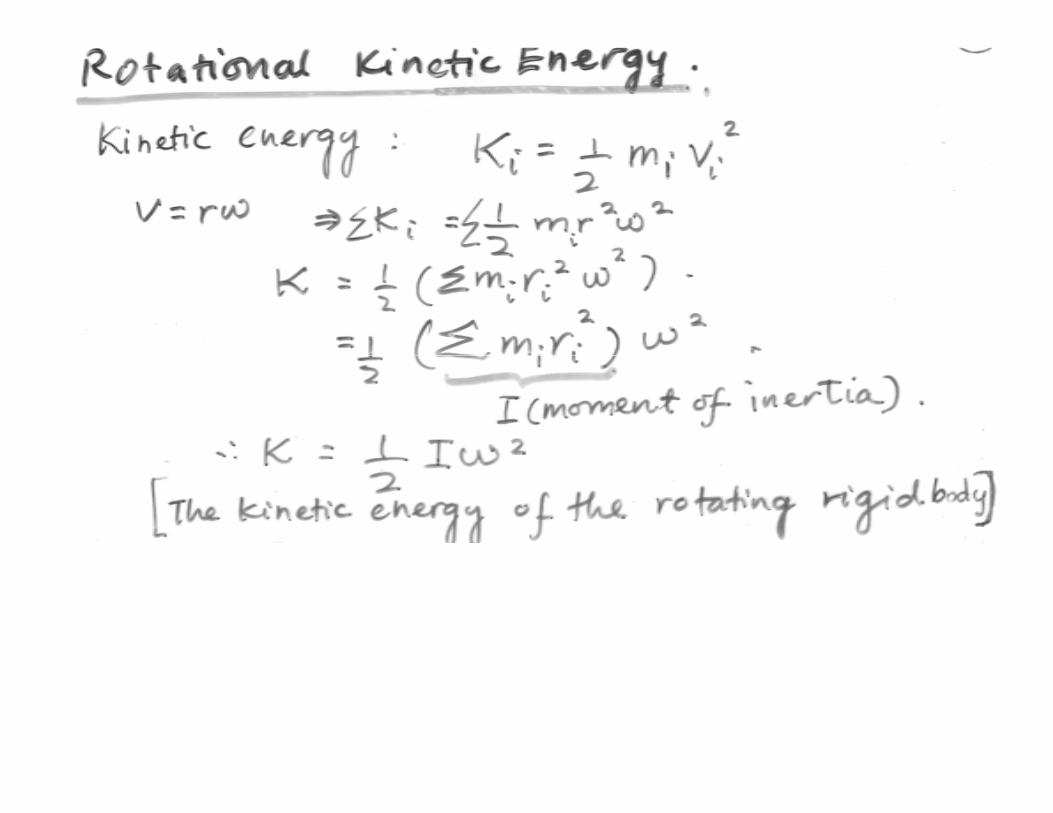
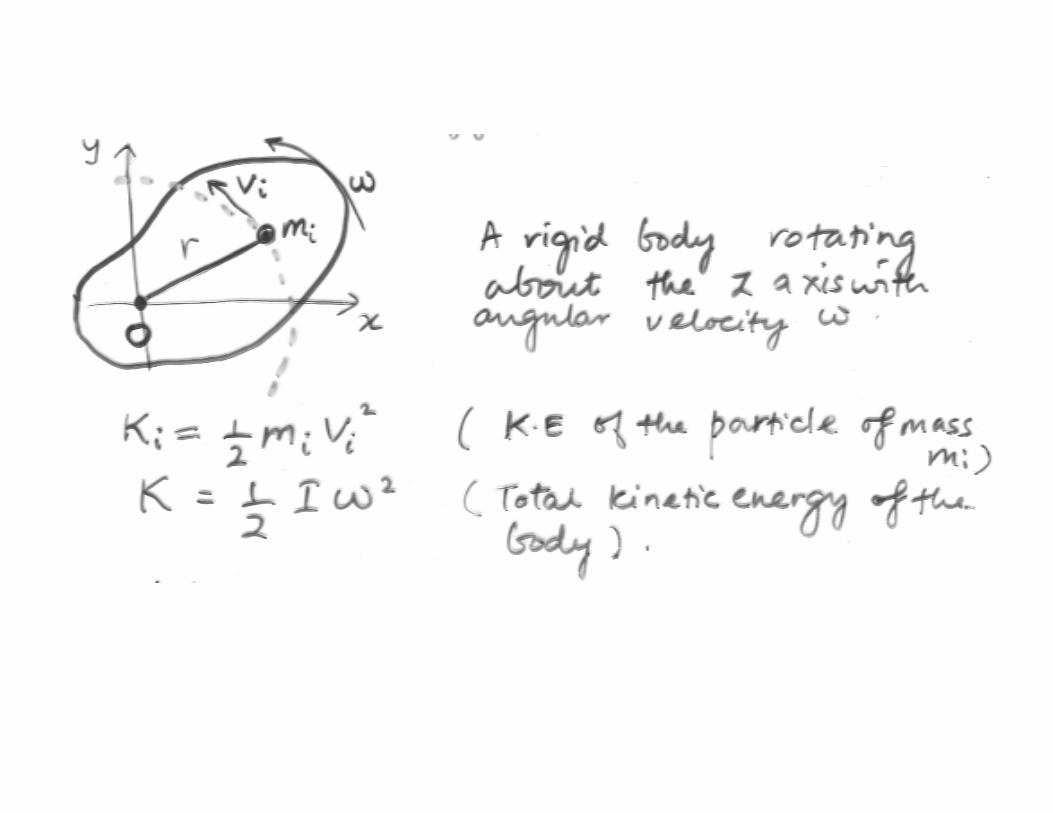
( ) ( )2 22 2 2 2o oo ov v a x x ω ω α θ θ−↔− − =− =2 2mvK IK ω
== ↔ 2
2
K
mF ma
K
IIτ α=↔=
↔
↔
F maF
P Fv
Iτ ατ=
↔=
↔↔
=
P τω=