stat modeling and time series
TRANSCRIPT
1
Statistical modeling, Simulation and Time series
Leif Nilsson, Oleg SeleznjevDepartment of Mathematics and Mathematical Statistics
• Statistical models
• Simulation (Bootstrap)
• Time series (Correlated data)

2
Statistical modeling
• How do humans react on a specific drug. • How do the sizes of piston rings behave in a production process.• How do processing conditions, e.g. reaction time, reaction
temperature, and type of catalyst, affect the yield of a chemical reaction.
• When the government plans for the future they need good prediction models for e.g. the Gross National Product (GNP).
By making observations and using statistical methods we can handle these kind of situations.
In many cases it is very hard to mathematically model a situation without observations.

3
Statistical modeling
Sometimes we know the model apart from one or more parameters.These parameter can then be estimated from data.
Natural questions are• what accuracy and precision do the estimates have?• how accurate will a prediction be?
These questions can also be handled with statistical methods.
4
Statistical modeling
When we have a mathematical model for a situation it can be of importance to verify how well this model agree with the reality.This can be done by comparing observations with the model (or simulated observations from the model).Here can statistical methods be useful.
Sometimes it is more or less impossible to make observations,e.g. the amounts of large insurance losses, extreme floods, …The extreme value theory can be used to model such situations.

5
Statistical modeling
Consider the flow of current in a thin copper wire. A mechanistic model is Ohm’s law:
current = voltage/resistance (I=E/R)If we measure this more than once, perhaps at different days, the observed current could differ slightly because of small changes or variations in factors that are not completely controlled (temperature, measuring technique, …).A more realistic (statistical) model for the observed current might be
I = E/R + ε = μ + ε,where the term ε includes the effect of all of unmodeled sources of variability that effects this system.
6
Statistical modeling
Assume that Ohm’s law is not known, i.e. we know only that the current depends on voltage and resistance,
current = f( voltage, resistance) = f( E, R)where f is an unknown function.A workable model could be developed from a first-order Taylor series expansion:
current = β0 + β1E + β2R.If we take into account the unmodeled sources of variability that effect this system, we get an empirical model
current = β0 + β1E + β2R + ε.

7
Statistical modeling
What is a reasonable model for ε.
Often we believe that there exists a large number of small effects acting additively and independently on the measurements, i.e. ε is a sum of these small effects.
The Central Limit Theorem (CLT) tells us that the distribution of a sum of a large number of independent variables is approximately normal.
In that case, ε is assumed to be normally distributed with expected value 0 and standard deviation σ, ε ∈N(0, ) .
This means that the measurements are also normally distributed with standard deviation σ.
2σ

8
Statistical modeling
Sometimes the small effects are acting multiplicatively and independently on the measurements, i.e. ε is a product of these small effects.
In that case, it is reasonable to believe that the measurements(and ε) are log-normally distributed, that is log(measurement) and (log(ε)) is normally distributed.
Depending on the situation, one has to investigate what distribution the observations follow.
There exists a large amount of distributions: binomial, Poisson, uniform, beta, Cauchy, gamma, lognormal, normal, Weibull,….
9
Statistical modeling
Let Y represent the resistance of a resistor marked 3.9 kiloohmswith a tolerance of 5%.Assume that we measure 40 similar resistors. Statistical model:
Yj = μ + εj, j=1,2,…,40.where μ is the theoretical resistance of these resistors (not necessarily 3.9).Before the measures are taken Yi is said to be a random variable.μ is estimated by the sample mean⎯y = 3.8801What is εj representing?
yyyyyy

10
Statistical modeling
The measurements are varying.
A theoretical standard deviation σ exists and
is estimated with the sample standard deviation: s = 0.0030
If data is normally distributed, the 95% of the measurements should roughly lie within the interval
⎯y ± 1.96*s = 3.8801 ± 0.0059 = ( 3.8742, 3.8860).
2 2
1( ) / ( 1)
n
ii
s y y n=
= − −∑

11
Statistical modeling
We can test the hypothesis H0: μ =3.9 (alternative H1: μ ≠ 3.9)
by comparing⎯y with μ = 3.9.
The estimate of the standard deviation of ⎯y is s/√40 = 0.00047 Since the data consist of 40 measurements, the sample mean is (approximately) normally distributed with mean μ and standard deviation σ/√40 (CLT).A 95% confidence interval is calculated as
⎯y ± 1.96*s /√40 = 3.8801 ± 0.0009359 = (3.8792, 3.8810).
We can reject H0: μ =3.9.
How do we interpret the interval?

12
Statistical modeling
We can also test the hypothesis H0: μ =3.9 (H1: μ ≠ 3.9)
by computing p-values.
If the calculated p-value is smaller than the pre-chosen level of significance α
(usually α=0.05, correspond to 95% confidence interval),
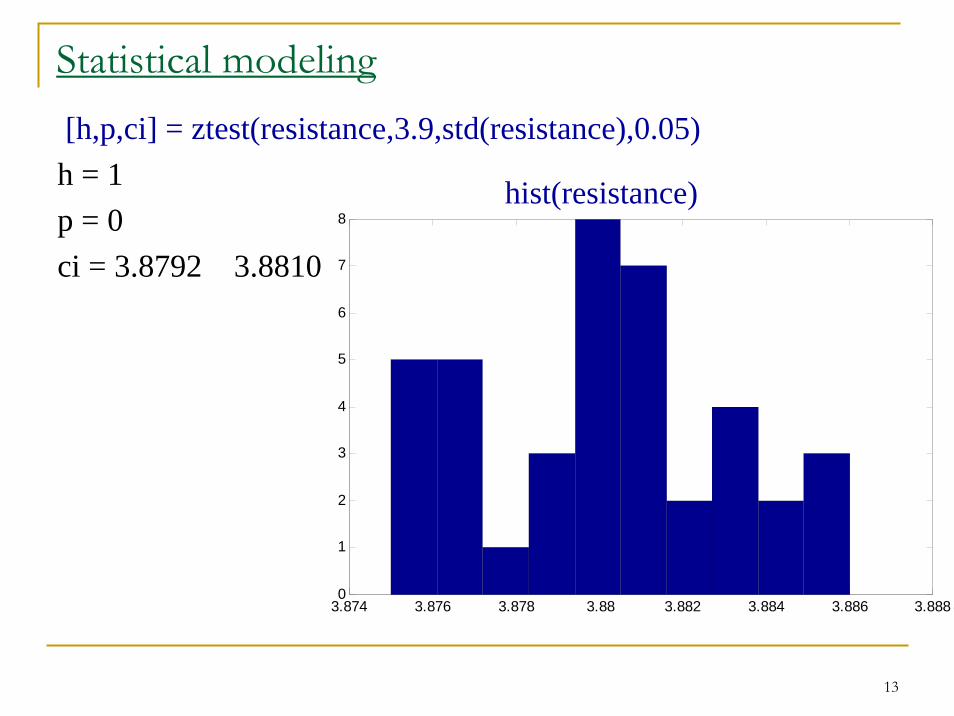
The null-hypothesis H0 is rejected. Let us calculate the p-value and confidence interval with Matlab (with Statistics toolbox)Data (resistance):3.883 3.883 3.880 3.875 3.881 3.877 3.880 3.877 3.877 3.881 3.876 3.881 3.881 3.875 3.875 3.880 3.878 3.875 3.884 3.880 3.877 3.883 3.882 3.886 3.877 3.880 3.883 3.884 3.880 3.879 3.880 3.881 3.882 3.879 3.885 3.886 3.879 3.881 3.880 3.881
13
Statistical modeling[h,p,ci] = ztest(resistance,3.9,std(resistance),0.05)h = 1p = 0ci = 3.8792 3.8810
3.874 3.876 3.878 3.88 3.882 3.884 3.886 3.8880
1
2
3
4
5
6
7
8hist(resistance)
14
Bootstrap
Simulation can be used to investigate the distribution of an estimator.
In order to do this we need random sources. In Matlab we can use the commandrand(n) to generate n uniformly distributed random numbers at the interval (0,1).
For other distributions Matlab has functions, e.g.
normrnd(mu,sigma) for normal distribution
binornd(N,P) for binomial distribution
15
Bootstrap
The term “Bootstrap” (Efron, 1979 ) is an allusion to the expression "pulling oneself up by one's bootstraps” (doing the impossible).
Traditional statistical methods are either
based upon the large sample theory or
prior beliefs or
inferences based upon small samples.
In most situations, bootstrap usually produces more accurate andreliable results than the traditional methods.
Bootstrap is especially useful when complicated estimators are to be analyze.

16
Bootstrap
Non-parametric bootstrap:
Assume that we are interested in an estimate of the observed sample (y1, y2, …, yn): e.g ⎯y, s, median, s /⎯y, ….
Construct artificial samples by resampling with replacement from the observed sample.
These artificial samples are regarded as new observed samples.
Calculate the estimate with the resampled data: e.g ⎯y*, s*, …
By doing this many times (say B times) we receive B estimates
that will behave approximately as the true estimator will behave.
Let us illustrate this in Matlab.
) y..., , y,(y *n
*2
*1
)y ..., ,y ,y( *B
*2
*1

17
BootstrapData (resistance): 3.883 3.883 3.880 3.875 3.881 3.877 3.880 3.877 3.877 3.881 3.876 3.881 3.881 3.875 3.875 3.880 3.878 3.875 3.884 3.880 3.877 3.883 3.882 3.886 3.877 3.880 3.883 3.884 3.880 3.879 3.880 3.881 3.882 3.879 3.885 3.886 3.879 3.881 3.880 3.881
CLT tells us that the sample mean will be approximately normallydistributed with mean μ and standard deviation σ/√40.
B = 10000;for i = 1:Bsample=randsample(resistance,40,true);boot.copy(i)=mean(sample);end
or shorterboot.copy = bootstrp(B, 'mean', resistance);
With replacement
18
Bootstrap
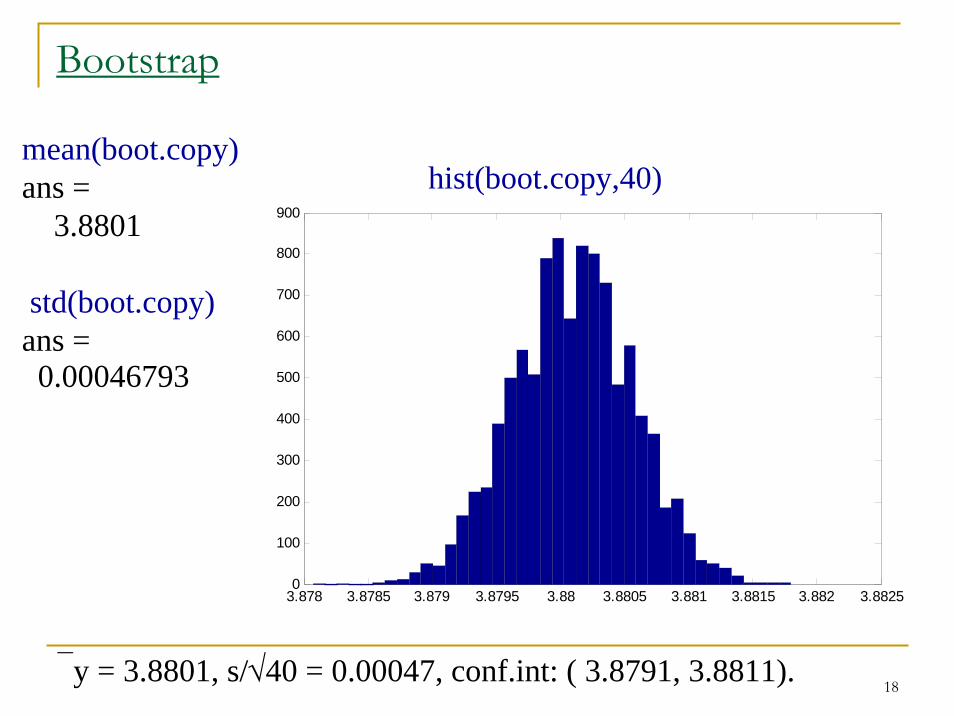
⎯y = 3.8801, s/√40 = 0.00047, conf.int: ( 3.8791, 3.8811).
mean(boot.copy)ans =
3.8801
std(boot.copy)ans =0.00046793
hist(boot.copy,40)
3.878 3.8785 3.879 3.8795 3.88 3.8805 3.881 3.8815 3.882 3.88250
100
200
300
400
500
600
700
800
900
19
BootstrapConfidence intervals can be estimated by the 2.5th and 97.5th percentiles.
quantile(boot.copy,[0.025 0.975])ans =
3.8792 3.8810
We can do all this with one command:bootci(B,{@mean, resistance})ans =
3.8791 3.8810
Since the sample should reflect the true distribution of the estimate we can see that 3.9 is not a reasonable value, hence we can reject H0: μ =3.9.
⎯y = 3.8801, s/√40 = 0.00047, conf.int: ( 3.8792, 3.8810).
20
Bootstrap
Parametric bootstrap:
Construct artificial samples by simulating samples of size n from an estimated distribution, e.g. Normal distribution with mean 3.8801 and standard deviation 0.0030.
Calculate the estimate with the simulated data many times. We receive B estimates that behave approximately as the true estimator.
Warning! For large enough n and B.
) y..., , y,(y *n
*2
*1
)y ..., ,y ,y( *B
*2
*1

21
BootstrapB=10000mu=mean(resistance);s=std(resistance);
for i = 1:Bsample= normrnd(mu,s,[1,40]);boot.copy(i)=mean(sample);end
mean(boot.copy)ans = 3.8801std(boot.copy)ans = 0.00047556quantile(boot.copy,[0.025 0.975])ans = 3.8792 3.8811
3.878 3.8785 3.879 3.8795 3.88 3.8805 3.881 3.8815 3.882 3.88250
100
200
300
400
500
600
700
22
Bootstraping the medianThere exist no explicit formulas for the distribution of the median of a sample (the sampling distribution of the median).
For large sample and normally distributed observations: σmedian = 1.253 σ/√n (approx.)
We can use simulation to look at the sample distribution of the median.
mu=0; stdev=1; B=10000; n=20;for i = 1:Bsample= normrnd(mu,stdev,[1,n]);sim.median(i)=median(sample);end
23
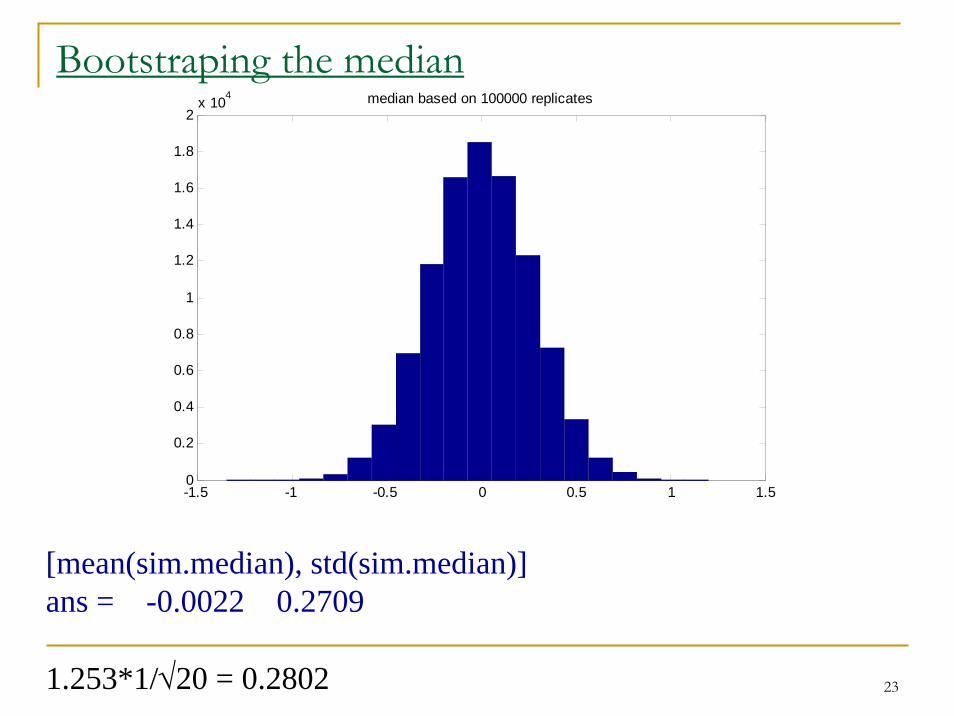
Bootstraping the median
[mean(sim.median), std(sim.median)]ans = -0.0022 0.2709
1.253*1/√20 = 0.2802
-1.5 -1 -0.5 0 0.5 1 1.50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2x 104 median based on 100000 replicates
24
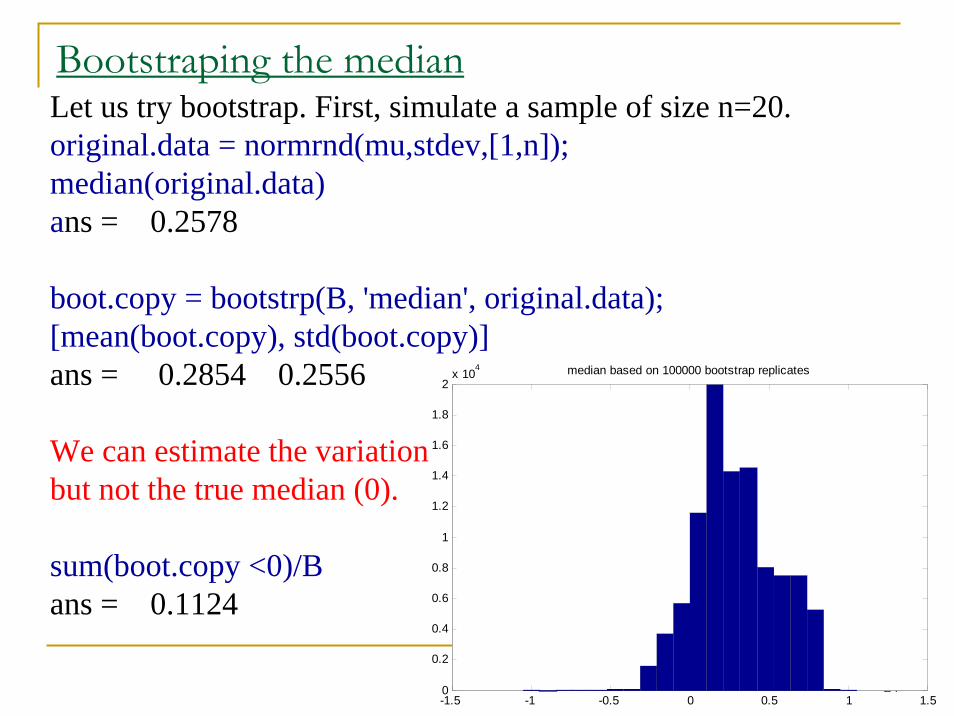
Bootstraping the medianLet us try bootstrap. First, simulate a sample of size n=20.original.data = normrnd(mu,stdev,[1,n]);median(original.data)ans = 0.2578
boot.copy = bootstrp(B, 'median', original.data);[mean(boot.copy), std(boot.copy)]ans = 0.2854 0.2556
We can estimate the variationbut not the true median (0).
sum(boot.copy <0)/Bans = 0.1124
-1.5 -1 -0.5 0 0.5 1 1.50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2x 10
4 median based on 100000 bootstrap replicates
25
Bootstraping the medianLet us assume that the distribution of the data are not normal (nor symmetric), e.g. exponentially distributed with μ = 2 (σ = 2).
mu=2; B=100000; n=20;for i = 1:Bsim.median(i)=median( exprnd(mu,[1,n]) );end[mean(sim.median),std(sim.median)]ans = 1.4382 0.4435 (approx: 1.253*2/√20 = 0.5604)original.data = exprnd(mu,[1,20]);median(original.data)ans = 1.6565boot.copy = bootstrp(B, 'median', original.data);[mean(boot.copy), std(boot.copy)]ans = 1.4656 0.3588

26
Bootstraping the median
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
2
2.5x 104 median based on 100000 exp(2) replicates
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
2
2.5x 104 median based on 100000 bootstrap replicates
True Bootstrap

27
Correlated dataLet X and Y be two dependent random variables.μX = E(X) and μY = E(Y) denote their expected values.The variances are defined as V(X) = E(X - μX)2 and V(X) = E(Y - μY)2.The covariance is defined asCov(X, Y) = E((X - μX) (Y - μY)) = E(XY) - μXμY,and the correlation coefficient as
Corr(X, Y) =
All these measures are in practice usually not known and need tobe estimated from samples (observations).
V(X)V(Y)Y)Cov(X,
28
Correlated dataLet (x1, y1), (x2, y2), …, (xn, yn) be a paired sample from the random variables X and Y. The sample means (⎯x and ⎯y ) estimates the expected values.The sample variances
and
estimate the variances.The covariance is estimated by
and consequently the correlation by
( )1-n
x-xS 1i
2i2
X∑ ==
n ( )1-n
y-yS 1i
2i2
Y∑ ==
n
( )( )1-n
-yx-x1i ii∑ =
n y
( )( )( ) ( )∑∑
∑==
=nn
n
y
y
1i2
i1i2
i
1i ii
-yx-x
-yx-x
29
Correlated dataCounting rules:Let a and b be two constants, then
E(aX + bY) = aE(X) + bE(Y)
V(aX + bY) =
Cov(aX, bY) = ab Cov(X, Y)
Corr(aX, bY) = Corr(X, Y)
( ) ( ) ( )2 2a V X b V Y 2Cov aX, bY+ +
30
Correlated dataRemember that the correlation coefficient measures the linear dependency between two random variables. There exists a theory (approximate) for testing if the correlation is equal to zero, but with simulations this can be done in an elegant way.Assume that we have the following data:x: 1 2 3 4 5 6 7 8 9 10y: 6 5 7 6 6 5 7 6 8 8
By the command [R,P]=corr(x, y) (vector-columns!) in Matlab, find that the correlation coefficient is 0.6145 and a the p-value is 0.0587 corresponding to the test of zero correlation (significant!).

31
0 1 2 3 4 5 6 7 8 9 10 110
1
2
3
4
5
6
7
8
9
10y vs x
x
yCorrelated data

-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 10
100
200
300
400
500
600
700
800
900
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 10
100
200
300
400
500
600
700
800
900
32
BootstrapWe can use bootstrap to analyze the correlation coefficient.Remember that we need to retain the dependency structure, and this is done by pairwise resampling.B=10000;boot.copy=bootstrp(B,'corr',x,y);hist(boot.copy,50)sum(boot.copy < 0)/Bans =
0.0036Notice that this is a p-value for a one sided test
33
Permutation testAnother way of testing the hypothesis of no correlation is the permutation test:x: 1 2 3 4 5 6 7 8 9 10y: 6 5 7 6 6 5 7 6 8 8Under the assumption of zero correlation the pairwise ordering does not matter.An equally likely realization would be e.g.x: 10 9 8 7 6 5 4 3 2 1y: 6 5 7 6 6 5 7 6 8 8
By permutating x many times and calculate the correlation coefficent each time we will get an idea of the distribution of the correlation coefficient if the data is uncorrelated.There exist 10! = 3628800 permutations ⇒ simulate.
34
Permutation test[R,P] =corr(x,y);B=10000; perm=0; for i = 1:B
xperm=randsample(x,10,false);perm(i)=corr(xperm,y);
endpval=sum(perm > R)/Bpval =
0.0270Notice that this is a p-value for a one sided test

35
Correlated data
R = 0.6145
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 10
200
400
600
800
1000
1200hist(perm,20)
References
A. M. Zoubir, D. R. Iskander, Bootstrap techniques for signal processing. Cambridge Un Press, 2004A. M. Zoubir, D. R. Iskander, Bootstrap Matlab Toolbox http://www.csp.curtin.edu.au/downloads/bootstrap_toolbox.html
1
Time seriesDefinition: A time series is a sequence of random variables (r.v.) ordered in time {Yt , t ∈ T}.
A realization of a time series occurs when measurements are taken at successive times (often uniformly spaced) , .
Examples:• The annual population of lynx.• Daily stock prices• Brain activity measured with electroencephalography (EEG)• The annual crop yield of sugar beets• Daily maximum and minimum temperatures
Note that the r.v:s are dependent and the order is of highest importance.
, 0, 1, ...t k t k= Δ = ±

2
Time series
1850 1860 1870 1880 1890 1900 1910 1920 19300
10
20
30
40
50
60
70
80
Time Series Plot of Lynx
Time (seconds)
Time Series/Lynx
Tstool in Matlab
3
Objectives of Time series analysis
Applications:1. Description2. Relations between two or more time series3. Prediction of future values4. Hypothesis testing5. Process monitoring
Modeling paradigm1. Set up a family of probability models to represent data2. Estimate parameters of a model3. Check a model for goodness-of-fit
4
Time seriesA time series {Yt, t=1,2,…} can contain• a trend Tt (slowly varying)• a long time cyclic influence Zt (e.g. business cycle)• a short time cyclic influence St (e.g. seasonal effect)• an error term (random) εt.
Yt = Tt + Zt + St + εt, t = 1,2,…
In the Lynx data, it seems to be a cyclic behavior and no trend?!
Stationary modelsWe will start to consider time series without any trend or cyclic behavior.
Let {Yt, t=1,2,…} be a time series with E(Yt2) < ∞.
The mean function of {Yt, t=1,2,…} is defined as
μY(t) = E(Yt).
and
the covariance function of {Yt, t=1,2,…} is defined as
γY(r, s) = Cov(Yr , Ys) = E[(Yr - μY(r)) (Ys - μY(s))]
for all integers r and s.
Stationary models{Yt, t=1,2,…} is (weakly) stationary if
(i) μY(t) is independent of t.
(ii) γY(t, t + h) is independent of t for each h (γY(h)=γY(t, t + h)).
Let {Yt, t=1,2,…} be a stationary time series. The autocovariance function (ACVF) of {Yt} is
γY(h) = Cov(Yt+h , Yt).
The autocorrelation function (ACF) of {Yt} is
ρY(h) = γY(h) / γY(0) = Cor(Yt+h , Yt).
γY(0) = Cov(Yt , Yt) = V(Yt).
The correlation/covariance between Yt and Ys depends only on the distance h=t-s, which is called the lag.

Stationary modelsEstimation of the ACF from an observed data {y1, y2, …, yn}.
We assume that data comes from a stationary time series.
The sample mean:
The sample autocovariance function:
The sample autocorrelation function:
∑===
n
i iY yn
yt1
1)(μ̂
( )( ) nhnyyyyn
h thn
t htY <<−−−= ∑ −
= +||
1 ||1)(γ̂
nhnhhY
YY <<−=
)0(ˆ)(ˆ)(ˆ
γγρ

Examples of models“IID noise”: {Yt, t=1,2,…} is a sequence of independent r.v’sthat are identically distributed with mean E(Yt) = 0 and variance V(Yt) = σ2 < ∞.
“White noise”: {Yt, t=1,2,…} is a sequence of uncorrelated r.v’swith mean E(Yt) = 0 and variance V(Yt) = σ2 < ∞.
IID noise ⇒ White noise
IID noise ⇔ White noise + normal distribution
μY(t) = E(Yt) = 0
γY(0) = Cov(Yt , Yt) = σ2 .
γY(h) = Cov(Yt+h , Yt) = 0 , h > 0.
Hence, stationary!
Examples of models“Random walk”: Yt = X1 + X2 + … + Xt =
= Yt-1 + Xt, t=1, 2, …,
where {Xt, t=1,2,…} is IID noise.
μY(t) = E(Yt) = 0
V(Yt) = Cov(Yt, Yt) = t σ2.
Cov(Yt+h , Yt) = t σ2.
Corr(Yt+h , Yt) = √t /√(t+h).
Depend on t, not stationary!
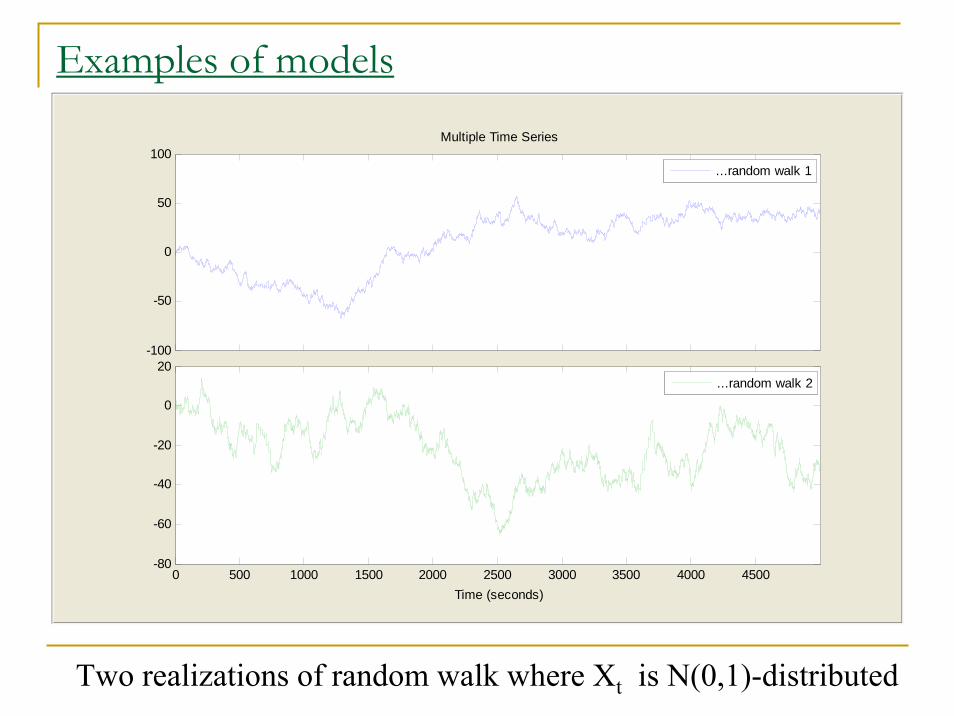
Examples of models
Two realizations of random walk where Xt is N(0,1)-distributed
-100
-50
0
50
100
Multiple Time Series
Time (seconds)0 500 1000 1500 2000 2500 3000 3500 4000 4500
-80
-60
-40
-20
0
20
...random walk 1
...random walk 2

Examples of modelsMA(1) (first-order moving average) process:
Yt = Xt + θ Xt-1, t = 0, ±1, ±2, …, where {Xt, t=1,2,…} is white noise and θ is a real-valued constant.
μY(t) = E(Yt) = 0
γY(0) = Cov(Yt, Yt) = (1 + θ2)σ2.
If h = ± 1 then
γY(h) = Cov(θ Xt-1, Xt) = θσ2 (otherwise 0),
Hence, stationary!
ρY(h) = γY(h) / γY(0) = θ/(1 + θ2) (otherwise 0).
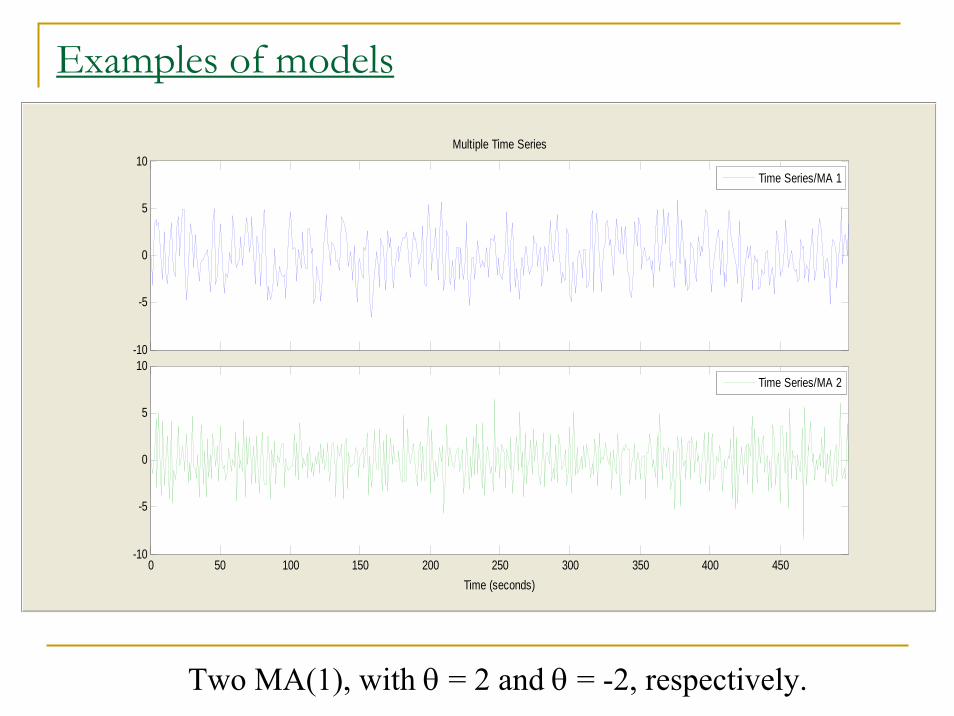
Examples of models
Two MA(1), with θ = 2 and θ = -2, respectively.
-10
-5
0
5
10
Multiple Time Series
Time (seconds)0 50 100 150 200 250 300 350 400 450
-10
-5
0
5
10
Time Series/MA 1
Time Series/MA 2
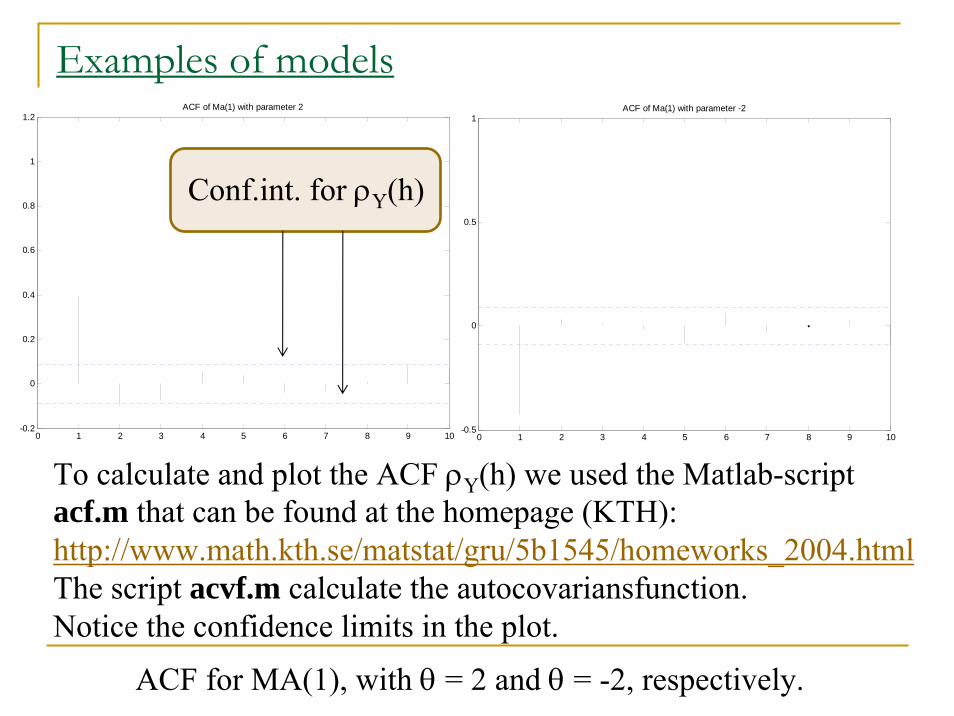
Examples of models
ACF for MA(1), with θ = 2 and θ = -2, respectively.
0 1 2 3 4 5 6 7 8 9 10-0.2
0
0.2
0.4
0.6
0.8
1
1.2ACF of Ma(1) with parameter 2
0 1 2 3 4 5 6 7 8 9 10-0.5
0
0.5
1ACF of Ma(1) with parameter -2
To calculate and plot the ACF ρY(h) we used the Matlab-script acf.m that can be found at the homepage (KTH): http://www.math.kth.se/matstat/gru/5b1545/homeworks_2004.htmlThe script acvf.m calculate the autocovariansfunction.Notice the confidence limits in the plot.
Conf.int. for ρY(h)

Examples of models
Regression: yn = -0.042 + 0.397*yn-1
-8 -6 -4 -2 0 2 4 6-8
-6
-4
-2
0
2
4
6Regression Ma 1: Yn = -0.042 + 0.397*Yn-1

Examples of models
Regression: yn = -0.0817 - 0.0993*yn-2
-8 -6 -4 -2 0 2 4 6-8
-6
-4
-2
0
2
4
6Regression Ma 1: Yn = -0.0817 - 0.0993*Yn-2
Yn
Yn-1

Examples of modelsEstimation of MA(1): Maximum likelihood estimation is a common technique to estimate parameters, here we make it intuitively.
By using that ρY(1) = θ/(1 + θ2) and that
we can find estimates of θ for the two series.
We find the estimates 2.04 and -1.8 respectively, which is quite close to the true values 2 and -2.
Furthermore, γY(0) = (1 + θ2)σ2 and
give estimates of the variance, 1.11 and 1.15.
Close to the true variance 1.
0.3954 (1)ρ̂Y = 0.4246- (1)ρ̂Y =
5.7470 (0)γ̂Y = 4.9015 (0)γ̂Y =
Examples of modelsAR(1) (first-order auto-regressive) process:
Yt = φ Yt-1 + Xt, t = 0, ±1, ±2, …,
where {Xt, t=1,2,…} is white noise and -1 < φ < 1.
μY(t) = 0
γY(0) = σ2 /(1 - φ2)
γY(h) = σ2φ|h| /(1 - φ2)Hence, stationary!ρY(h) = γY(h) / γY(0) = φ|h|.
∑∞
= −=0j jt
jt XY φ

Examples of models
-10
-5
0
5
10
Multiple Time Series
Time (seconds)0 50 100 150 200 250 300 350 400 450
-10
-5
0
5
10
Time Series/AR 1
Time Series/AR 2
Two AR(1), with φ = 0.9 and φ = -0.9, respectively.

Examples of models
ACF for AR(1), with φ = 0.9 and φ = -0.9, respectively.
0 5 10 15 20 25 30 35 40 45 50-0.2
0
0.2
0.4
0.6
0.8
1
1.2ACF of AR(1) with parameter 0.9
0 5 10 15 20 25 30 35 40 45 50-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1ACF of AR(1) with parameter -0.9
Result from the Matlab-script acf:1.0000 0.9125 0.8311 0.7561 0.6884 0.6312 0.57161.0000 -0.8986 0.8175 -0.7437 0.6805 -0.6163 0.5444

Examples of modelsEstimation of AR(1):
Here we can use that ρY(h) = φ|h| for different h. If we choose h=1
we have two estimates of φ (one for each time series).
The true ones: 0.9 and -0.9.
Furthermore, γY(h) = σ2φ|h| /(1 - φ2)
give estimates of the variance: 0.93 and 1.06.
Close to the true variance 1.
0.9125 (1)ρ̂Y = 0.8986- (1)ρ̂Y =
5.5540 (0)γ̂Y = 5.4844 (0)γ̂Y =

Examples of modelsARMA(1,1):
A combination af a AR(1) and a MA(1).
Yt = φ Yt-1 + Xt + θXt-1, t = 0, ±1, ±2, …,
where {Xt, t=1,2,…} is white noise φ + θ ≠0.
These examples of models can be extended to “higher dimensions”: AR(p), MA(q) and ARMA(p,q).

Models with trendAssume that we also have a trend in the time series:
Xt = Tt + Yt, t = 1,2,…,n
where {Yt, t=1,2,…,n} is a stationary time series.
We need to estimate and eliminate the trend.
1.Finite moving average filer:
2.Polynomial fitting (Linear regression):
qntq,X12q
1T̂ q
-qj jtt −<<+
= ∑ = +
kk10t tβ̂tβ̂β̂T̂ +++=

Models with trendLinear trend: 1+0.1*t, stationary error: AR(1) with φ = 0.9.n=100; mu=0; stdev=1;for i = 1:2*n; Y(i+1)= 0.9*Y(i) + normrnd(mu,stdev,1); end;for i = 1:n; X(i)= 1+0.1*i+Y(n+i); end;
0 10 20 30 40 50 60 70 80 90 100-2
0
2
4
6
8
10
12
14
t
X
Time series with trend, Solid line = True trend
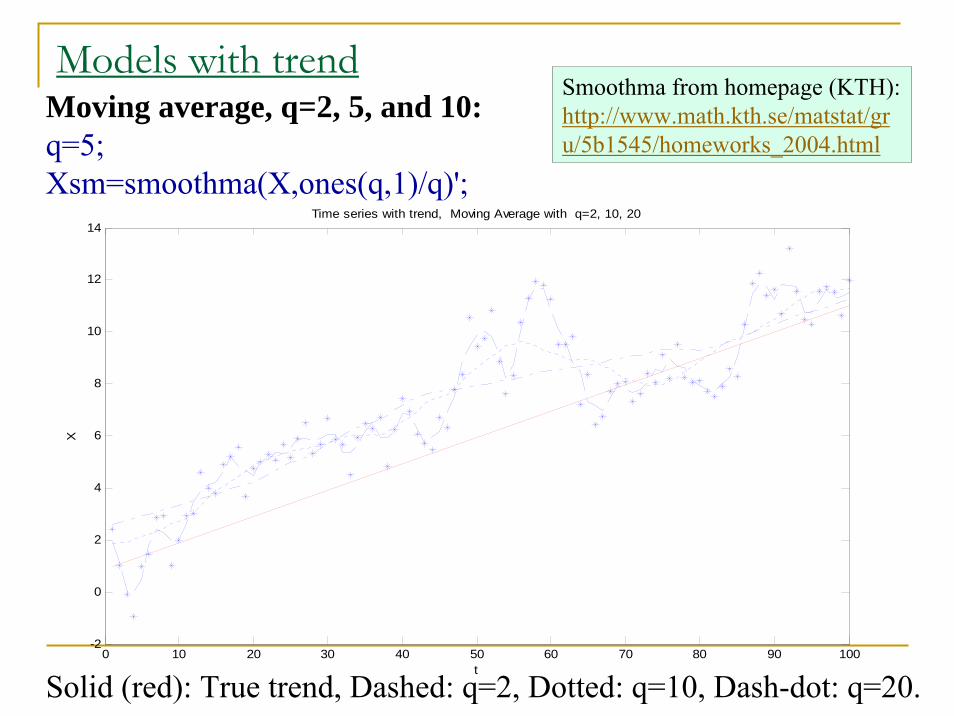
Models with trendMoving average, q=2, 5, and 10:q=5;Xsm=smoothma(X,ones(q,1)/q)';
Solid (red): True trend, Dashed: q=2, Dotted: q=10, Dash-dot: q=20.
Smoothma from homepage (KTH): http://www.math.kth.se/matstat/gru/5b1545/homeworks_2004.html
0 10 20 30 40 50 60 70 80 90 100-2
0
2
4
6
8
10
12
14
t
X
Time series with trend, Moving Average with q=2, 10, 20

Models with trendMoving average, q=2, 5, and 10:
Trend elimination:Ysm =X - Xsm; AC=acf(Ysm); AC([1:5])
ACF from the ‘trend eliminated’ series: ans = 1.0000 -0.5513 0.0866 -0.0643 -0.0253 (q=2)ans = 1.0000 0.5563 0.2690 0.0272 -0.0883 (q=10)ans = 1.0000 0.7292 0.5481 0.3847 0.2838 (q=20)
ACF from the ‘true’ AR(1)-series:ans = 1.0000 0.8177 0.6600 0.4950 0.3776
True = 1.0000 0.9 0.81 0.729 0.6561
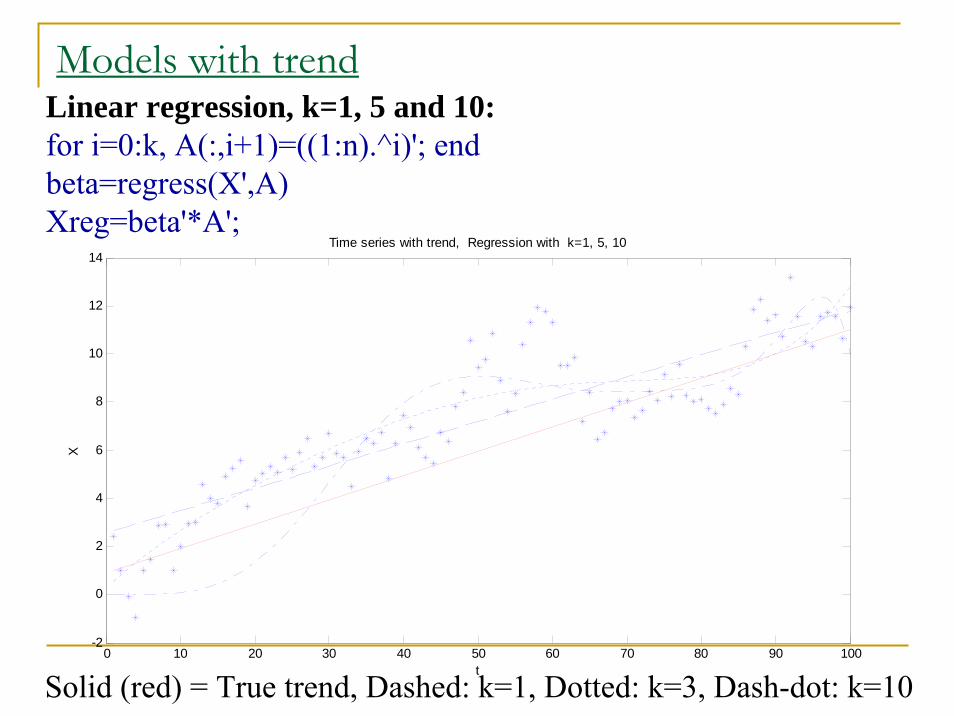
Models with trend
Solid (red) = True trend, Dashed: k=1, Dotted: k=3, Dash-dot: k=10
Linear regression, k=1, 5 and 10:for i=0:k, A(:,i+1)=((1:n).^i)'; endbeta=regress(X',A)Xreg=beta'*A';
0 10 20 30 40 50 60 70 80 90 100-2
0
2
4
6
8
10
12
14
t
X
Time series with trend, Regression with k=1, 5, 10

Models with trendLinear regression, k=1, 5 and 10 :
Trend elimination:Yreg =X - Xreg; AC=acf(Yreg); AC([1:5])
ACF from the ‘trend eliminated’ series: ans = 1.0000 0.7686 0.6097 0.4679 0.3820 (k=1)ans = 1.0000 0.6623 0.4377 0.2616 0.1837 (k=5)ans = 1.0000 0.8226 0.7068 0.6016 0.5348 (k=10)
ACF from the ‘true’ AR(1)-series:ans = 1.0000 0.8931 0.7761 0.6959 0.6264
True = 1.0000 0.9 0.81 0.729 0.6561
Models with both trend and seasonalityAssume that we also have a trend in the time series:
Xt = Tt + St + Yt, t = 1,2,…,n
where {Yt, t=1,2,…,n} is a stationary, St+d = St and .
The period d is assumed to be known.
1.Eliminate the trend with a moving average filter: If d is even usemt = (0.5Xt-q + Xt-q+1 + … + Xt+q-1 + 0.5Xt+q)/d, q < t ≤ n-q
else use ordinary moving average filter.
2.Estimate the seasonal component:For each k=1,2,.. d, calculate averages of
0Sd
1j jt =∑ = +
kw
kw{ }k jd k jdX – m ,q k jd n q+ + < + ≤ − 1
1
ˆ; , 1,...,d
k k is w d w k d−= − =∑

Models with both trend and seasonalityLet us add seasonality to our previous time series.
S=repmat([-5,5,2,0,-2],1,20);
Here is d=5.
0 10 20 30 40 50 60 70 80 90 100-6
-4
-2
0
2
4
6
t
S
Model for Season

Models with both trend and seasonalityThe resulting time series.
Hard to see the seasonality!
0 10 20 30 40 50 60 70 80 90 100-10
-5
0
5
10
15
20
t
X
Time series with trend and season

Models with both trend and seasonalityThe resulting time series.
Now it is easier to see the seasonality!
0 10 20 30 40 50 60 70 80 90 100-10
-5
0
5
10
15
20
t
X
Time series with trend and season
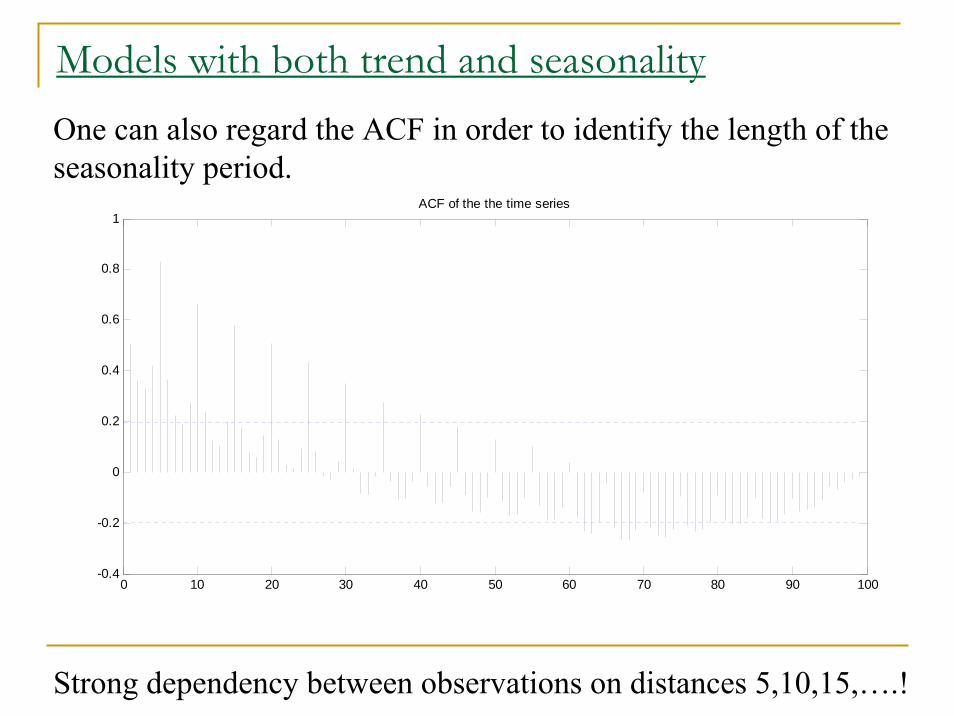
Models with both trend and seasonalityOne can also regard the ACF in order to identify the length of the seasonality period.
Strong dependency between observations on distances 5,10,15,….!
0 10 20 30 40 50 60 70 80 90 100-0.4
-0.2
0
0.2
0.4
0.6
0.8
1ACF of the the time series

Models with both trend and seasonality1. The estimation of the trend with moving average (q=5).
m=smoothma(X,ones(q)/q)';
0 10 20 30 40 50 60 70 80 90 100-4
-2
0
2
4
6
8
10
12
t
m
The m-estimate of the Trend
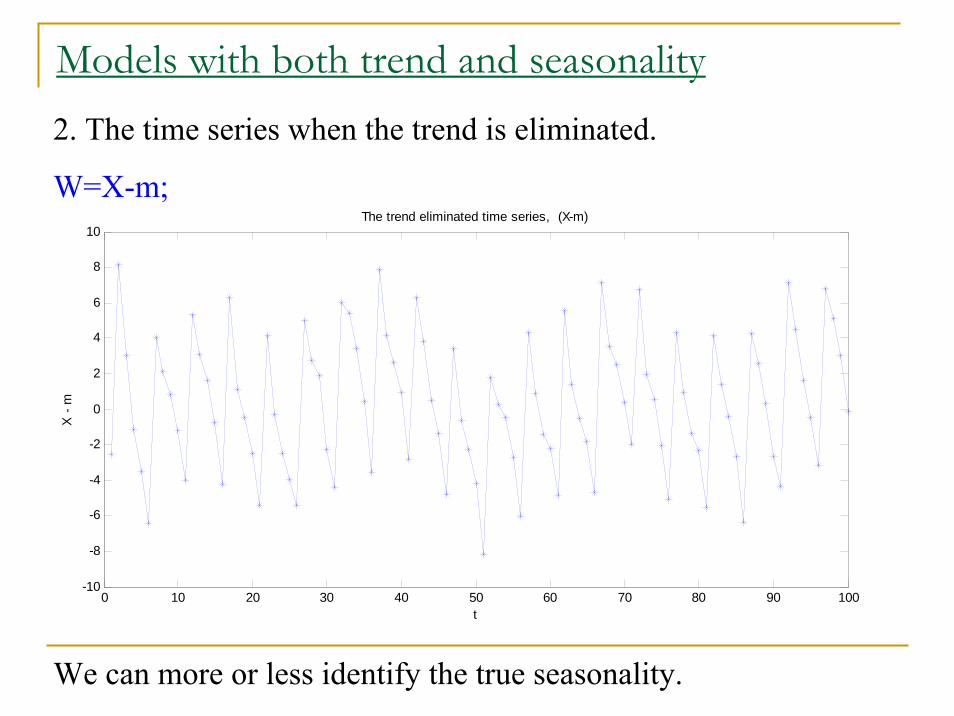
Models with both trend and seasonality2. The time series when the trend is eliminated.
W=X-m;
We can more or less identify the true seasonality.
0 10 20 30 40 50 60 70 80 90 100-10
-8
-6
-4
-2
0
2
4
6
8
10
t
X -
m
The trend eliminated time series, (X-m)
Models with both trend and seasonality3. For each seasonal time point k, take the averages over the
periods, k = 1,2,…, d.We get an estimate of the seasonality.
for i=1:4; Shat(i)=mean(W(mod((1:100),5)==i));end;
Shat(q) = mean(W(mod((1:100),5)==0));
Shat = -4.7014 5.4425 2.3385 0.4023 -1.7619
True = -5 5 2 0 -2

Models with both trend and seasonality4. Withdraw the seasonality from the original time series X (with
trend).
0 10 20 30 40 50 60 70 80 90 100-4
-2
0
2
4
6
8
10
12
14
t
X -
S
The season eliminated time series

Models with both trend and seasonality5. It remain to eliminate the trend.
This could be done e.g. with moving average or regression.If we use moving average with q= 5
0 10 20 30 40 50 60 70 80 90 100-4
-2
0
2
4
6
8
10
12
14
t
XT
Season eliminated Time series, Moving Average with q=5
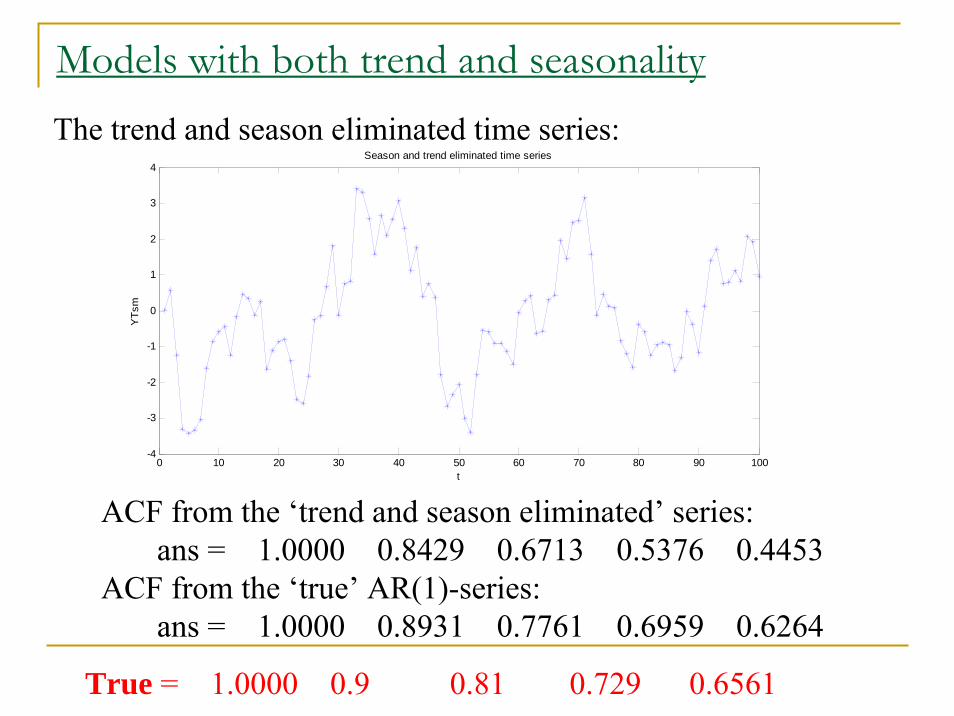
Models with both trend and seasonalityThe trend and season eliminated time series:
ACF from the ‘trend and season eliminated’ series: ans = 1.0000 0.8429 0.6713 0.5376 0.4453
ACF from the ‘true’ AR(1)-series:ans = 1.0000 0.8931 0.7761 0.6959 0.6264
True = 1.0000 0.9 0.81 0.729 0.6561
0 10 20 30 40 50 60 70 80 90 100-4
-3
-2
-1
0
1
2
3
4
t
YTs
m
Season and trend eliminated time series
Bootstrap for time series
IntroductionThe observations are time dependent:we cannot resample from the empirical distribution function Fn(or resampling with replacement) which does not reflect the timedependency.
Two main approaches:
-Using a parametric model for resampling
-Using blocks of the data to simulate the time series.
– Typeset by FoilTEX – 1

Model based resampling
We use standard time series models(ARMA)for defining the datagenerating process.
- Let {Xt} be a second order stationary time series, with zero meanand autocovariance function γk: for all t, k we have
E(Xt) = 0;Cov(Xt, Xt+k) = γk.
- The autocorrelation function is ρk = γk/γ0 for all k = 0, 1, 2, ....
- Some basic models
– Typeset by FoilTEX – 2
Moving Average, MA(1)
• The model Xt = Zt + θZt−1, t = . . . ,−1, 0, 1, . . .
• here {Zt} is a white noise process of innovations:
Zt ∼WN(0, σ2),uncorrelated
• the autocorrelation function is ρ1 = θ/(1+θ2) and ρk = 0 for |k| > 1,the variance γ0 = (1 + θ2)σ2
• Matlab Simulation of MA(1) series:Zt=randn(1,n); X=filter([1 b],1,Zt); % b = θ
– Typeset by FoilTEX – 3

AutoRegressive, AR(1)
• The model Xt = φXt−1 + Zt, t = . . . ,−1, 0, 1, . . .
• here |φ| < 1, and {Zt} is a white noise WN(0, σ2), Xt =∑∞0 φkZt−k
• the variance, Cov(Xt−k, Zt) = 0, k ≥ 1, γ0 = V ar(Xt) =V ar(φXt−1 + Zt) = φ2γ0 + σ2;and γ0 = σ2/(1− φ2).
• the autocorrelation function is ρk = φ|k| and for k = 1,
φ = ρ1 = γ1/γ0
• Matlab Simulation AR(1) series:Zt=randn(1,n); X=filter(1,[1 a],Zt); % a = −φ
– Typeset by FoilTEX – 4

AutoRegressive Moving Average, ARMA(p,q)
• The model
Xt =p∑k=1
φkXt−k + Zt +q∑
k=1
θkZt−k,
{Zt} is a white noise WN(0, σ2).
• Conditions on the coefficients to obtain a stationary process.
• Matlab Simulation of ARMA(1,1) series:Zt=randn(1,n); X=filter([1 b],[1,a],Zt); % b =θ, a = −φ
– Typeset by FoilTEX – 5

The bootstrap
• Fit the model to the data
• Constructed the residuals from the fitted model
• Re-center the residuals(mean zero as Zt)
• Generate new series by incorporating random samples from thefitted residuals in the fitted model
– Typeset by FoilTEX – 6
Example: AR(1) model
• We have a sample x1, . . . , xn, compute φ̂ = ρ̂1:we must have |φ̂| < 1
• For the normal model, V ar(φ̂) is approximately (1− φ2)/n.
• Estimated innovations(residuals):
Zt = xt − φ̂xt−1, for t = 2, . . . , n,
• Z1 is unavailable because x0 is unknown;
• re-center the residuals Z̃t = Zt − Z̄;
• draw with replacement from the set {Z̃t, t = 2, . . . , n} to obtain then+ 1 bootstrap innovations Z∗0 , . . . , Z∗n
– Typeset by FoilTEX – 7

• Then we define the bootstrap sample X∗0 , . . . , X∗n:
X∗0 = Z∗0
X∗t = φ̂X∗t−1 + Z∗t , t = 1, ..., n
• Then compute φ̂∗ from the observation X∗1 , ..., X∗n, and proceed asusual.
• In fact, the series {X∗t } is not stationary. For improving this:
– Start the series of X∗t at t = −k (in place of t = 0) and thendiscard the observations X∗−k, ..., X
∗0 .
– If k is large enough, the resulting bootstrap sample will beapproximatively stationary.
Can be used for testing hypothesis,confidence intervals(bootstrap t-percentile,. . .), prediction,. . .
– Typeset by FoilTEX – 8
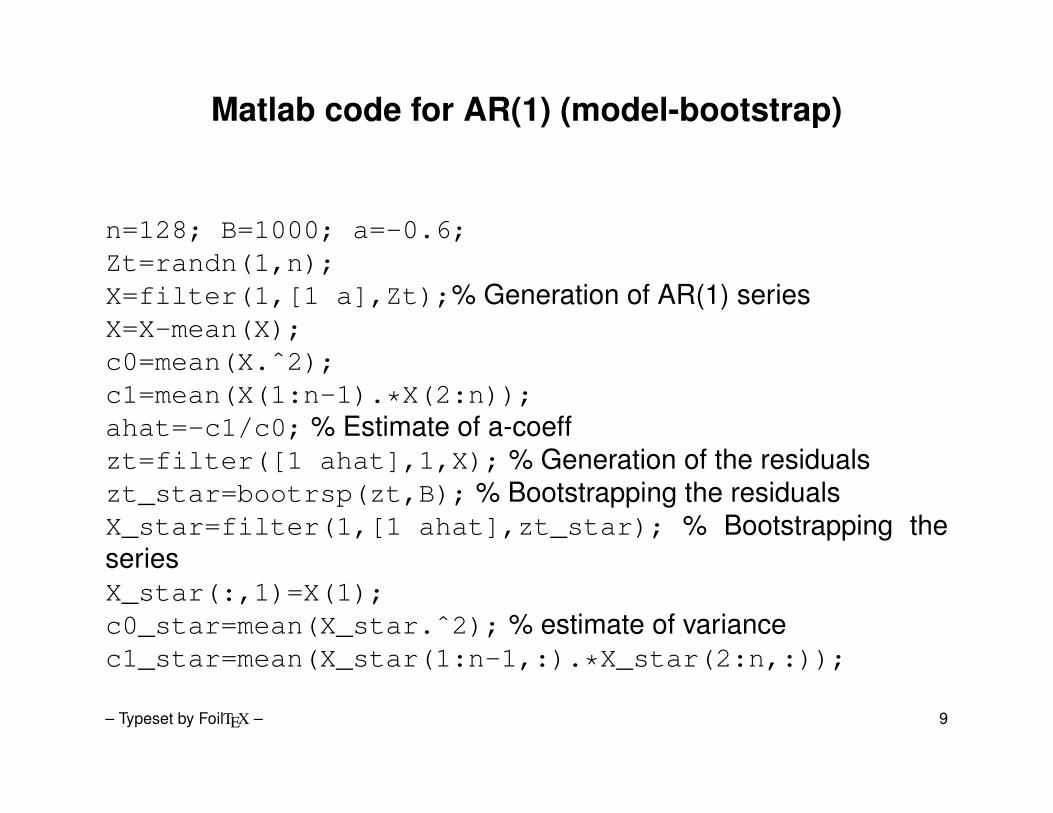
Matlab code for AR(1) (model-bootstrap)
n=128; B=1000; a=-0.6;Zt=randn(1,n);X=filter(1,[1 a],Zt);% Generation of AR(1) seriesX=X-mean(X);c0=mean(X.ˆ2);c1=mean(X(1:n-1).*X(2:n));ahat=-c1/c0; % Estimate of a-coeffzt=filter([1 ahat],1,X); % Generation of the residualszt_star=bootrsp(zt,B); % Bootstrapping the residualsX_star=filter(1,[1 ahat],zt_star); % Bootstrapping theseriesX_star(:,1)=X(1);c0_star=mean(X_star.ˆ2); % estimate of variancec1_star=mean(X_star(1:n-1,:).*X_star(2:n,:));
– Typeset by FoilTEX – 9
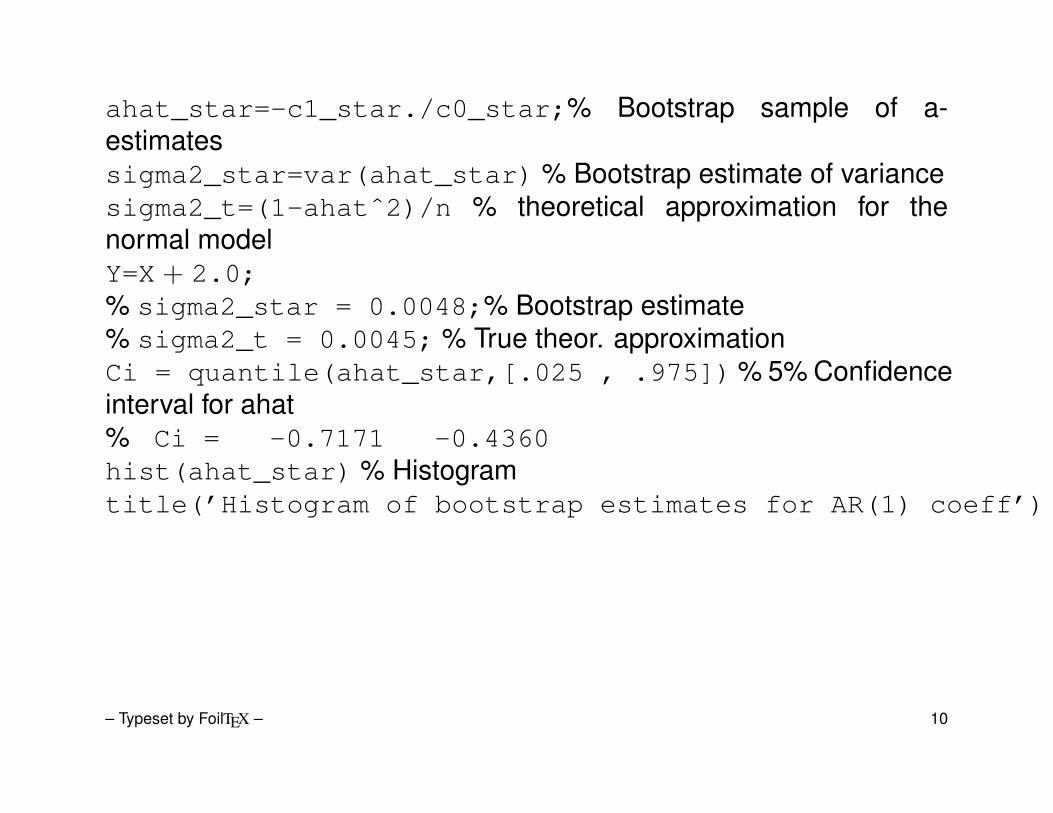
ahat_star=-c1_star./c0_star;% Bootstrap sample of a-estimatessigma2_star=var(ahat_star) % Bootstrap estimate of variancesigma2_t=(1-ahatˆ2)/n % theoretical approximation for thenormal modelY=X + 2.0;% sigma2_star = 0.0048;% Bootstrap estimate% sigma2_t = 0.0045; % True theor. approximationCi = quantile(ahat_star,[.025 , .975])% 5% Confidenceinterval for ahat% Ci = -0.7171 -0.4360hist(ahat_star) % Histogramtitle(’Histogram of bootstrap estimates for AR(1) coeff’)
– Typeset by FoilTEX – 10

−1 −0.9 −0.8 −0.7 −0.6 −0.5 −0.4 −0.30
50
100
150
200
250
300
350
400Histogram of bootstrap estimates for AR(1) coeff
Histogram of bootstrap estimates for AR(1) coefficient, a = −φ = −0.6
– Typeset by FoilTEX – 11
Block resampling
The idea here is not to draw from innovations defined with respectto a particular model but on blocks of consecutive observations. Wedon’t need a model here...The algorithm is as follows:
• Divide the data into b non-overlapping blocks of length l. So wesuppose n = lb.
– Typeset by FoilTEX – 12
• Define the blocks yj:
y1 = (x1, . . . , xl)
y2 = (xl+1, . . . , x2l)
. . .
yb = (x(b−1)l+1, . . . , x2l)
• Take a bootstrap sample of b-blocks drawn independently withreplacement from the set (y1, . . . , yb).
• This produce a bootstrap sample (y∗1, . . . , y∗b ) which gives a
bootstrap series of length n.
The idea is that if l is large enough, the original dependence in theseries is preserved
– Typeset by FoilTEX – 13
• So we hope that the bootstrap statistics T (X∗) will haveapproximatively the same distribution as the statistics T (X) in thereal world, with the real series...
• On the other hand we must have enough blocks b to estimate withaccuracy the bootstrap distribution of T (X∗)
- A good balance: should be of the order O(nγ) where γ ∈ (0, 1),so b = n/l→∞ as n→∞.
- There are several variants of the method (overlapping blocks,blocks of blocks, blocks of random length, pre-whitening,...).
- Theoretical works are still in progress(optimal choice of l, etc.)
– Typeset by FoilTEX – 14

Matlab code for AR(1)(block-bootstrap)
Function bpestcir from Bootstrap Matlab Toolbox
% [est,estvar]=bpestcir(X,estfun,L1,M1,Q1,L2,M2,Q2,B,PAR1,...) %% The program calculates the estimate and the variance% of an estimator of a parameter from the input vector X.% The algorithm is based on a circular block bootstrap% and is suitable when the data is weakly correlated.%% Inputs:% x - input vector data% estfun - the estimator of the parameter given as a Matlab function% L1 - number of elements in the first block (see ”segmcirc.m”)% M1 - shift size in the first block
– Typeset by FoilTEX – 15

% Q1 - number of segments in the first block% L2 - number of elements in the second block (see ”segmcirc.m”)% M2 - shift size in the second block% Q2 - number of segments in the second block% B - number of bootstrap resamplings (default B=99)% PAR1,... - other parameters than x to be passed to estfun%% Outputs:% est - estimate of the parameter% estvar - variance of the estimator%% Example:% [est,estvar]=bpestcir(randn(1000,1),’mean’,50,50,50,10,10,10);
[est,estvar]=bpestcir(Y,’mean’,20,20,20,10,10,10)% est = 1.9633; estvar = 0.0212;% est_tr=2.0 mean[est,estvar]=bpestcir(Y,’var’,20,20,20,10,10,10)
– Typeset by FoilTEX – 16

% Variance estimation c0% est = 1.7843; estvar = 0.0250 ;% est_tr=1.5625 variance
% Compare with the white noise% sigma_iid=var_mhat_iid=c0/n= 0.0109% Theor. estimate for the variance of mean for the white noise% Var(mhat)=estvar=0.0212
References
Simar, L. (2008) An Invitation to the Bootstrap: Panacea for Statistical Inference?Handouts. Dept. Stat., Louvain University.
A. M. Zoubir, D. R. Iskander, Bootstrap techniques for signal processing.Cambridge Un Press, 2004
A. M. Zoubir, D. R. Iskander, Bootstrap Matlab Toolboxhttp://www.csp.curtin.edu.au/downloads/bootstrap_toolbox.html
– Typeset by FoilTEX – 17