statistical signal and array processing - george...
TRANSCRIPT
1
Statistical Signal and Array Processing
Harry L. Van TreesUniversity Professor Emeritus
Kristine L. BellApplied & Engineering Statistics
May 19, 2006
Van Trees & Bell 2
Objectives
• Apply statistical signal processing techniques to important new systems
• Advance the theory in the areas of:
• Array processing• Bayesian estimation• Nonlinear tracking/filtering
• Write / edit books

Van Trees & Bell 3
Activities
• Applications– Novel Satellite Communications (Argon ST / DARPA)– Space-time Adaptive Processing (STAP)
for Navy E2C (Lockheed Orincon / ONR)– Aeroacoustic Sensor Networks (Army Research Office)
• Theory– Recursive Bayesian bounds (DARPA SPO)– Tracking using sparse arrays (DARPA SPO)– Multistatic radar (DARPA SPO)
• Books– Optimum Array Processing, Part IV of
Detection, Estimation & Modulation TheoryH. L. Van Trees, 2002
– Bayesian Bounds, H. L. Van Trees and K. Bell,IEEE Press, 2006
Van Trees & Bell 4
Novel Satellite Communications
“ In the past, we successfully showed we can overcome the jamming of our satellite navigation systems. Can we also protectthe uplinks of our satellite communications systems? The Novel Satellite Communications program (NSC) is using new phenomenologies to overcome this vulnerability, ensuring that our troops will always have robust satellite communications available.Last year, we performed field testing that confirmed the properties of the antijam phenomenologies we are exploiting. This year, three teams are developing the algorithms and techniques that exploit these phenomena to provide a robust antijam capability for our communications satellites.”
Michael Zatman, DARPA Tech 2005, August 9-11, 2005

Van Trees & Bell 5
Van Trees & Bell 6
Overview
• Full Beam Set Algorithm – Provides a set of beampatterns that collectively “cover” an Area of
Interest (AOI) on the earth’s surface while suppressing up to NTjammers in the AOI
– Each beam may allow jmax jammers not to be nulled– Beams may be scanned to detect new users and jammers
• Beam Subspaces– For a known user (or set of users), beam subspaces are
collection of beams that span the user and un-nulled jammersubspaces
– Subspace processing provides reduced rank data for subsequent processing

Van Trees & Bell 7
Full Beam Set Generation
• Define Grid Points on AOI– e.g. hexagonal grid with 121 points
• For each Grid Point– Find maximum SINR beam with jmax
un-nulled jammers– MVDR with parametric interference
covariance matrix, pointing to Grid PointStart by excluding jmax closest jammers
Adjust jammer selection iteratively to improve SINR
-200 -100 0 100 200-250
-200
-150
-100
-50
0
50
100
150
200
250AOI
x (km) y
(km
)
Van Trees & Bell 8
Scenario
• 1084-element cantor ring array configuration• NT = 20 randomly distributed jammers• jmax = 3 un-nulled jammers per beam
• Beam set quality given as percent coverage of AOI at -3 dB SINR loss level
-10 -8 -6 -4 -2 0 2 4 6 8 10
-8
-6
-4
-2
0
2
4
6
8
meters
met
ers
Phased Array, N=1084

Van Trees & Bell 9
Typical Beams (jmax = 3)
Beam 17, SINRL=-0.98078 dB
x (km)
y (k
m)
-200 -100 0 100 200
-200
-100
0
100
200
-50
-40
-30
-20
-10
0Beam 50, SINRL=-2.6664 dB
x (km)
y (k
m)
-200 -100 0 100 200
-200
-100
0
100
200
-50
-40
-30
-20
-10
0
Beam 96, SINRL=-2.9547 dB
x (km)
y (k
m)
-200 -100 0 100 200
-200
-100
0
100
200
-50
-40
-30
-20
-10
0Beam 121, SINRL=-1.6157 dB
x (km)
y (k
m)
-200 -100 0 100 200
-200
-100
0
100
200
-50
-40
-30
-20
-10
0
Pointing Direction
Un-nulledjammers
Nulledjammers
Nulledjammers
Van Trees & Bell 10
STAP for E2C
• Program
– Replace rotating linear array with circular phased array
– Develop STAP algorithm
• Our role
– Full rank algorithms have too many DOF to be computationally feasible (e.g. 360) in real time
– Develop clever reduced-rank algorithms that have acceptable performance
Van Trees & Bell 11
Courtesy of Dr. R. David Dikeman
Van Trees & Bell 12
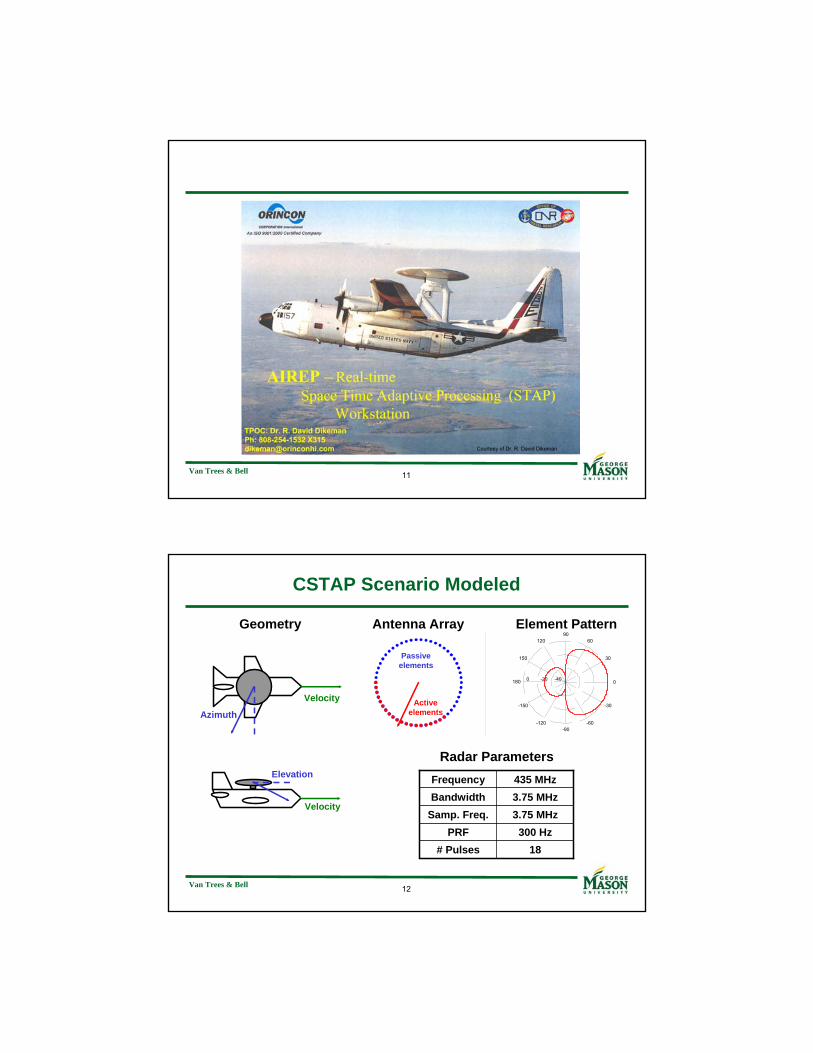
CSTAP Scenario Modeled
Velocity
Elevation
Velocity
Azimuth
Geometry
Passiveelements
Activeelements
Antenna Array
-40 -20 0
30
-150
60
-120
90
-90
120
-60
150
-30
180 0
Element Pattern
18# Pulses300 HzPRF
3.75 MHzSamp. Freq.3.75 MHzBandwidth435 MHzFrequency
Radar Parameters
Van Trees & Bell 13
Candidate techniques
• PRI LCMV – MQPC
• Adaptive Subspace
– Elgenspace
– Conjugate gradient / MSWF
Van Trees & Bell 14
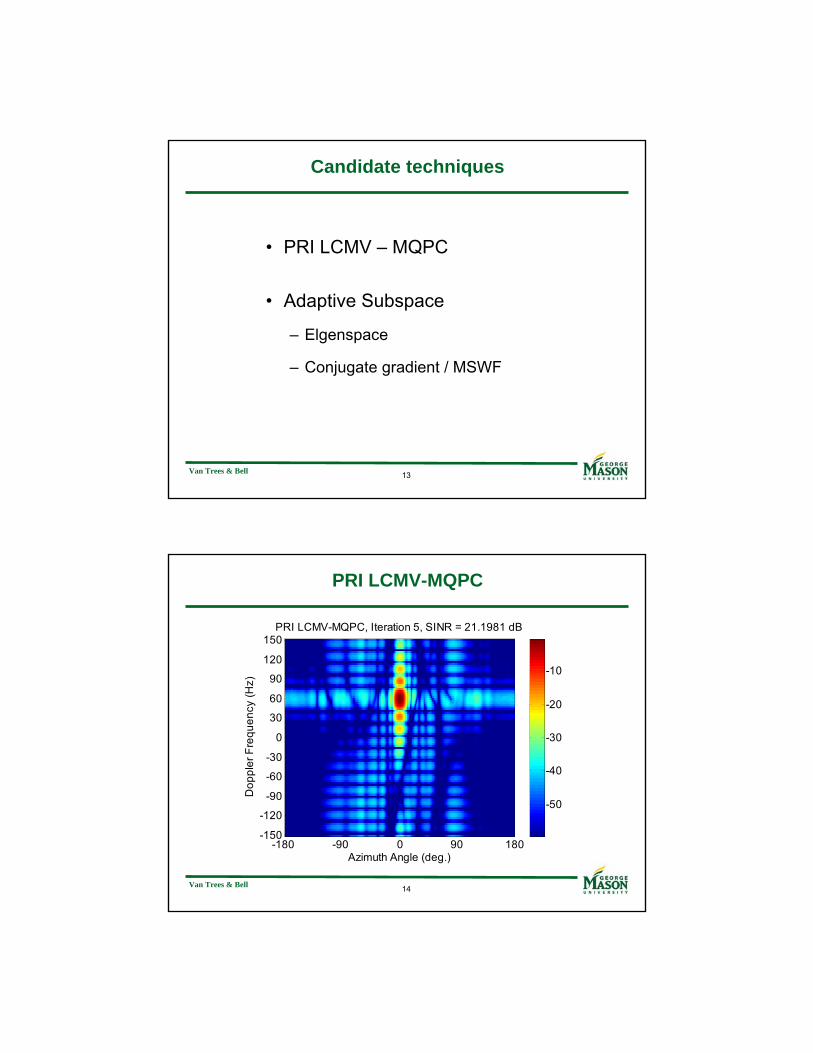
PRI LCMV-MQPC
Azimuth Angle (deg.)
Dop
pler
Fre
quen
cy (H
z)
PRI LCMV-MQPC, Iteration 5, SINR = 21.1981 dB
-180 -90 0 90 180-150
-120
-90
-60
-30
0
30
60
90
120
150
-50
-40
-30
-20
-10
Van Trees & Bell 15
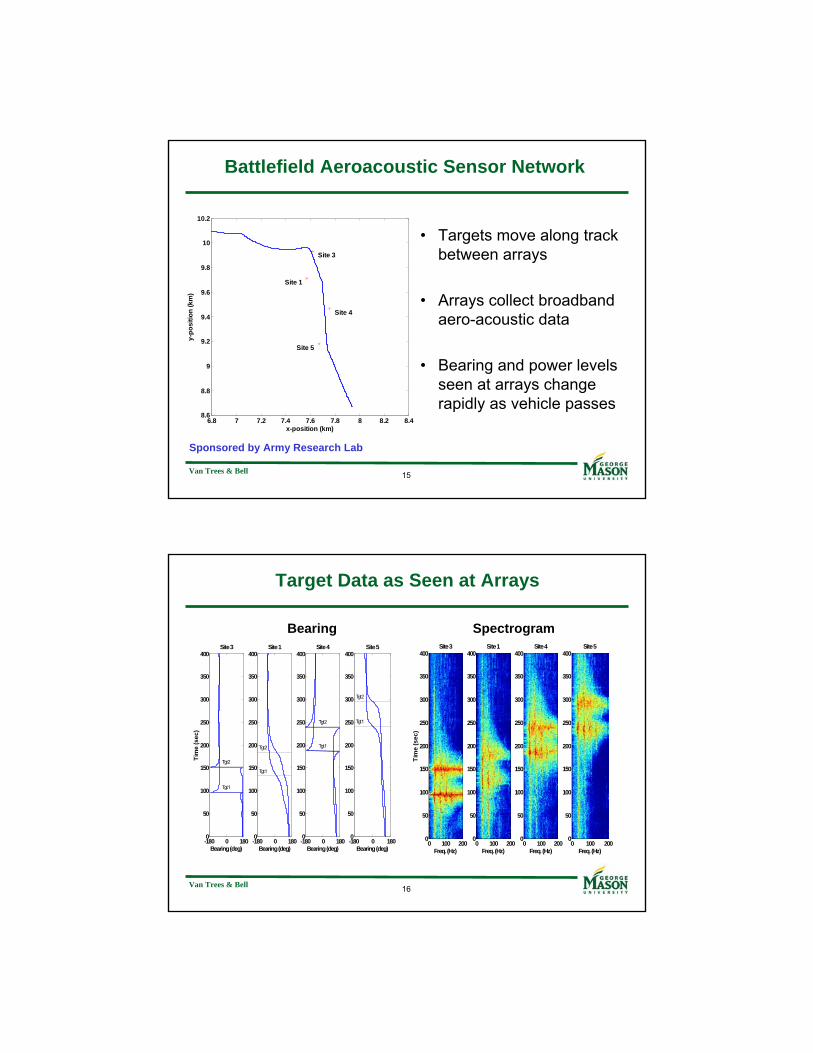
Battlefield Aeroacoustic Sensor Network
6.8 7 7.2 7.4 7.6 7.8 8 8.2 8.48.6
8.8
9
9.2
9.4
9.6
9.8
10
10.2
Site 3
Site 1
Site 4
Site 5
x-position (km)
y-po
sitio
n (k
m)
• Targets move along track between arrays
• Arrays collect broadband aero-acoustic data
• Bearing and power levels seen at arrays change rapidly as vehicle passes
Sponsored by Army Research Lab
Van Trees & Bell 16
Target Data as Seen at Arrays
Bearing SpectrogramSite 3
Tim
e (s
ec)
Freq. (Hz)0 100 200
400
350
300
250
200
150
100
50
0
Site 1
Freq. (Hz)0 100 200
400
350
300
250
200
150
100
50
0
Site 4
Freq. (Hz)0 100 200
400
350
300
250
200
150
100
50
0
Site 5
Freq. (Hz)0 100 200
400
350
300
250
200
150
100
50
0-180 0 1800
50
100
150
200
250
300
350
400
Tgt1
Tgt2Tim
e (s
ec)
Site 3
Bearing (deg)-180 0 1800
50
100
150
200
250
300
350
400
Tgt1
Tgt2
Site 1
Bearing (deg)-180 0 1800
50
100
150
200
250
300
350
400
Tgt1
Tgt2
Site 4
Bearing (deg)-180 0 1800
50
100
150
200
250
300
350
400
Tgt1
Tgt2
Site 5
Bearing (deg)
Van Trees & Bell 17
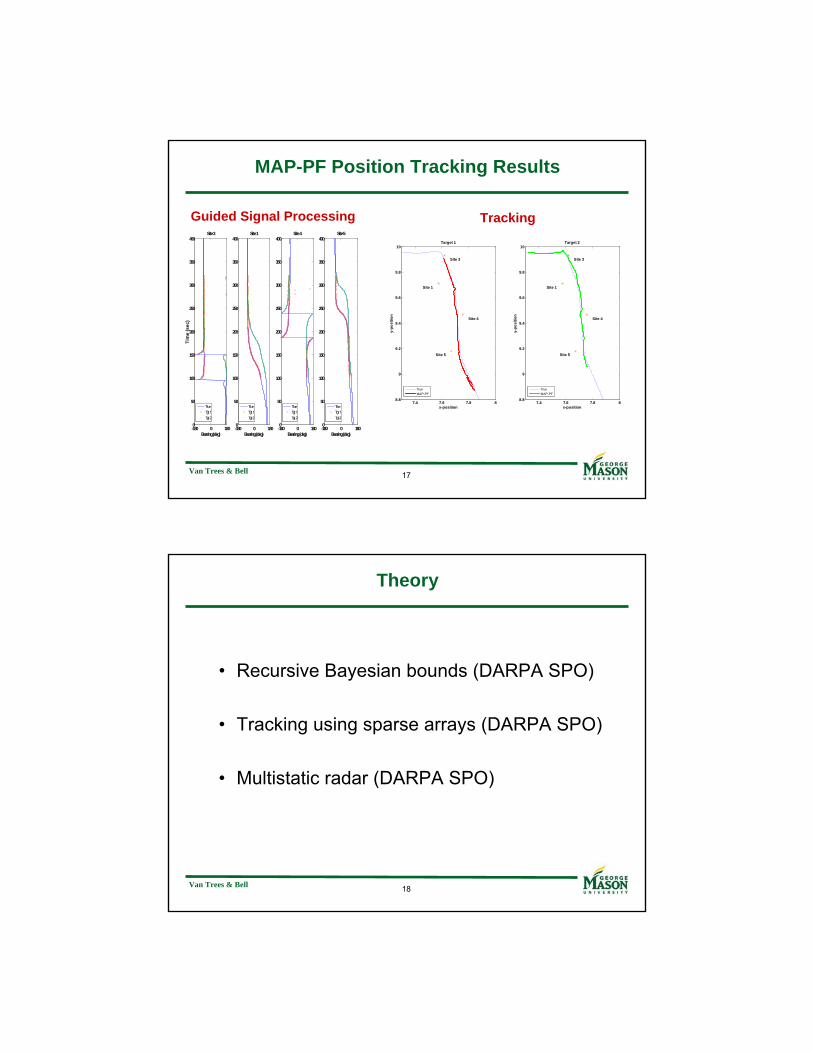
MAP-PF Position Tracking Results
7.4 7.6 7.8 88.8
9
9.2
9.4
9.6
9.8
10
Site 3
Site 1
Site 4
Site 5
x-position
y-po
sitio
n
Target 1
TrueMAP-PF
7.4 7.6 7.8 88.8
9
9.2
9.4
9.6
9.8
10
Site 3
Site 1
Site 4
Site 5
x-position
y-po
sitio
n
Target 2
TrueMAP-PF
-180 0 1800
50
100
150
200
250
300
350
400
Tim
e (s
ec)
Site 3
Bearing (deg)
TrueTgt 1Tgt 2
-180 0 1800
50
100
150
200
250
300
350
400Site 1
Bearing (deg)
TrueTgt 1Tgt 2
-180 0 1800
50
100
150
200
250
300
350
400Site 4
Bearing (deg)
TrueTgt 1Tgt 2
-180 0 1800
50
100
150
200
250
300
350
400Site 5
Bearing (deg)
TrueTgt 1Tgt 2
Guided Signal Processing Tracking
Van Trees & Bell 18
Theory
• Recursive Bayesian bounds (DARPA SPO)
• Tracking using sparse arrays (DARPA SPO)
• Multistatic radar (DARPA SPO)

Van Trees & Bell 19
Recursive Bayesian Bounds
• Observe a nonlinear function of a vector parameter θ on the presence of noise
• Observe a nonlinear function of a discrete-time random process x(k) in the presence of noise
• In general, an analytic expression for the performance of the estimator cannot be found
• Lower bounds on performance are the primary approach
Van Trees & Bell 20
Parameter Estimation Bounds (Covariance Inequality)
Recursive WW[Rapoport & Oshman 04 (T)][Reece & Nicholson 05 (T)][Bell & Van Trees 06 (T/A)]
Weiss – Weinstein (WW)[Weiss & Weinstein 85, 88]
Recursive mixed[Bell & Van Trees 06]
Mixed Bayesian[Renaux et al 06]
Mixed[Abel 93]
[McAulay & Hofstetter 71]
RBZB[Reece & Nicholson 05 (T)]
Bobrovsky – Zakai (BZB)[Bobrovsky et al 76, 87][Reuven & Messer 97]
Barankin[Barankin 4-9]
[McAulay & Hofstetter 71]
RB Bhat.[Reece & Nicholson 05 (T)]
B Bhat. (BB)[Van Trees 66, 68]
Bhattacharyya[Bhat. 48]
RBCRB[Tichavsky et al 98]
BCRB[Van Trees 68]
Cramér-Rao[Fisher 22, Dugue 37, Cramér 46, Rao 45]
Recursive BayesianBayesianDeterministic

Van Trees & Bell 21
An SAT – type analogy
are to
−30 −25 −20 −15 −10 −5−45
−40
−35
−30
−25
−20
−15
−10
−5
0
SNR (dB)
Loca
l MS
E (
dB)
MLE Barankin Cramer−Rao
ESTIMATION THEORYBOUNDS
as
BASKETBALLREBOUNDS
- IN BOTH CASES -GEORGE MASON IS IN THE FINAL FOUR!
are to
Van Trees & Bell 22
Tracking using sparse arrays
d1 d2 … dN-2 dN-1
θ
Target TrackTarget

Van Trees & Bell 23
Tracking using sparse arrays
-1 -0.5 0 0.5 1-40
-35
-30
-25
-20
-15
-10
-5
0
u = cos(θ)
Bea
mpa
ttern
(dB
)
Van Trees & Bell 24
Tracking using sparse arrays
-1 -0.5 0 0.5 1
50
100
150
200
250
300
350
400
450
500
Bearing (u)
Tim
e
-50 -40 -30 -20 -10 00
50
100
150
200
250
300
350
400
450
500
RMSE
Tim
e
TrueTracks
SimBCRB
-1 -0.5 0 0.5 1
50
100
150
200
250
300
350
400
450
500
Bearing (u)
Tim
e
-50 -40 -30 -20 -10 00
50
100
150
200
250
300
350
400
450
500
RMSE
Tim
e
TrueTracks
SimBCRB
-1 -0.5 0 0.5 1
50
100
150
200
250
300
350
400
450
500
Bearing (u)
Tim
e
-50 -40 -30 -20 -10 00
50
100
150
200
250
300
350
400
450
500
RMSE
Tim
e
TrueTracks
SimBCRB
-1 -0.5 0 0.5 1
50
100
150
200
250
300
350
400
450
500
Bearing (u)
Tim
e
-50 -40 -30 -20 -10 00
50
100
150
200
250
300
350
400
450
500
RMSE
Tim
e
TrueTracks
SimBCRB
Van Trees & Bell 25
Issues
• Bound performance of trackers
• Utilize sidelobe / grating lobe structure to improve performance
Van Trees & Bell 26
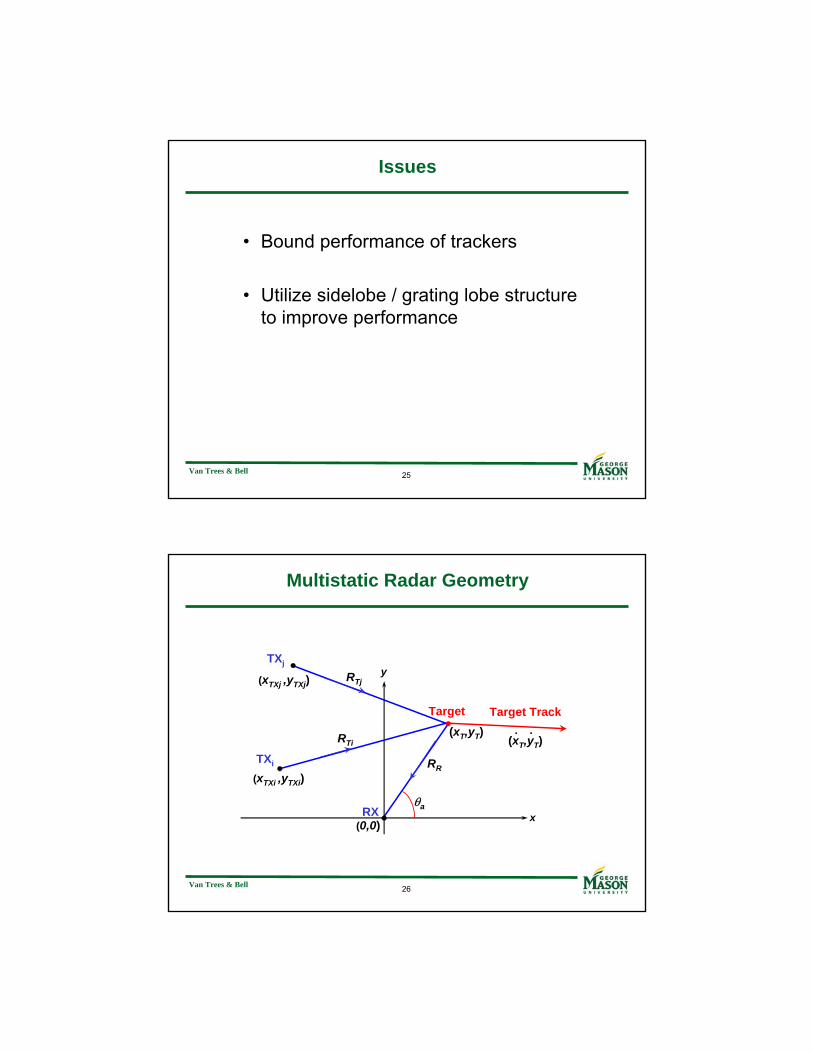
Multistatic Radar Geometry
y
Target Track
(xT,yT)
RR
xRX
TXi
θa
RTi(xT,yT) · ·
(xTXi ,yTXi)
(0,0)
Target
TXj
RTj(xTXj ,yTXj)

Van Trees & Bell 27
Two Transmitter Example
(x0,y0)
300 m/sec
200 sec
RX400 sec
–60 –40 –20 0 20 6040x (km)
y (km)
60
50
40
30
20
10
0TX2
TX1
0 sec
Van Trees & Bell 28
Multistatic Radar BCRB

Van Trees & Bell 29
Books
• Optimum Array Processing, Part IV of Detection, Estimation & Modulation Theory,
H. L. Van Trees, 2002
• Bayesian Bounds, H. L. Van Trees and K. Bell, IEEE Press, 2006
Van Trees & Bell 30
Optimum Array Processing
• Published in 2002
• Widely-used in graduate schools & industry
• In 4th printing
• Chinese edition in print
Van Trees & Bell 31
Bayesian Bounds
• An IEEE Press Reprint Book published in conjunction with Wiley
• Contains 80 selected papers which include most of the important results in the area
• Contains about 50 pages of new text to provide context and integration of the material
Van Trees & Bell 32
Summary
• An active research and educational program that combines theory and practical application