subspace-based cooperative spectrum...
TRANSCRIPT

SUBSPACE-BASED COOPERATIVE SPECTRUM SENSING FOR
COGNITIVE RADIOS
By
RAGHAVENDRA UDUPI RAO
Bachelor of Engineering in Telecommunication
Vishveshwaraya Technological University
Bangalore, Karnataka, India
2006
Submitted to the Faculty of theGraduate College of
Oklahoma State Universityin partial fulfillment ofthe requirements for
the Degree ofMASTER OF SCIENCE
May, 2010

SUBSPACE-BASED COOPERATIVE SPECTRUM SENSING FOR
COGNITIVE RADIOS
Thesis Approved:
Dr. Qi Cheng
Thesis Advisor
Dr. Martin T Hagan
Dr. Nazanin Rahnavard
Dr. A Gordon Emslie
Dean of the Graduate College
ii

ACKNOWLEDGMENTS
I would firstly like to thank my advisor Dr. Qi Cheng. Without her constant guidance
and support, this work would have never lifted off the ground and reach this stage. I
would also like to thank her for giving me the opportunity to work with her as a Re-
search assistant and in course, introducing me to the wonderful world of Statistical Signal
Processing and Cognitive radios.
I would like to thank my parents: Radhakrishna Rao and Tara Rao for their never
ending support and encouragement. Without their backing I could have not come this
far.
I would like to extend my sincere gratitude towards the members of the Statistical
signal processing lab for all the help that they have given.
Last but not the least, I would like to thank all my roommates and friends here in
Stillwater, for always being there and providing me with an excellent social life.
iii
TABLE OF CONTENTS
Chapter Page
1 INTRODUCTION 1
1.1 Spectrum scarcity and Cognitive Radio . . . . . . . . . . . . . . . . . . . . 1
1.2 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Organization of Thesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Literature review 9
2.1 Conventional Spectrum Sensing Techniques . . . . . . . . . . . . . . . . . . 10
2.1.1 Matched Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.2 Energy Detector . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1.3 Cyclostationary Feature Detection . . . . . . . . . . . . . . . . . . . 12
2.2 Narrow Band Spectrum Sensing Techniques . . . . . . . . . . . . . . . . . 12
2.3 Wide Band Spectrum Sensing Techniques . . . . . . . . . . . . . . . . . . . 14
2.4 Collaborative Spectrum Sensing . . . . . . . . . . . . . . . . . . . . . . . . 15
3 Subspace-based Cooperative spectrum sensing 22
3.1 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.2 Subspace-based spectrum sensing algorithm . . . . . . . . . . . . . . . . . 23
3.2.1 Estimation of K . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.3 Cooperative spectrum sensing algorithm . . . . . . . . . . . . . . . . . . . 28
3.3.1 Data Association . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3.2 Fusion of Estimates, the linear unbiased estimate . . . . . . . . . . 33
4 Simulations 36
4.1 Fading only . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.2 Shadowing plus fading . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
iv
5 CONCLUSIONS 47
A Derivation of the elements of the Q matrix 48
B Analysis of ESPRIT 52
C Tracy-Widom distribution 53
D More on k-means clustering technique using the MDL principle 55
D.1 k-means . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
D.2 MDL principle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
D.3 Instantiations of the MDL-Algorithm . . . . . . . . . . . . . . . . . . . . . 57
BIBLIOGRAPHY 61
v

LIST OF TABLES
Table Page
4.1 Detection performance of the proposed method for all the three configura-
tions. σ2 = 10dB, K=3, ρ = 10dB. . . . . . . . . . . . . . . . . . . . . . . 41
vi

LIST OF FIGURES
Figure Page
1.1 Spectrum utilization. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Cognitive Radio cycle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Spectrum hole concept. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1 Implementation of an energy detector. . . . . . . . . . . . . . . . . . . . . 11
2.2 Implementation of a cyclostationary feature detector. . . . . . . . . . . . . 12
2.3 An advantage of cooperative spectrum sensing in cognitive radio (CR) net-
works is depicted here; CR 1 is shadowed over the sensing channel and CR
3 is shadowed over the reporting channel, but the presence of PU is not
missed because of CR 2 reporting to the base station. . . . . . . . . . . . 16
2.4 Hidden terminal problem. . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.5 Exposed terminal problem. . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.6 Collaborative sensing with a fusion center. . . . . . . . . . . . . . . . . . . 20
2.7 Collaborative sensing without a fusion center. . . . . . . . . . . . . . . . . 21
3.1 PSD of a wide BOI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2 Illustration of the data association algorithm. SNR=-15dB, D = 10. There
are only three PU signals in the source located at 0.31, 1.57 and 2.83
rad/sample, respectively. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.1 The percentage of correct detections as a function of σ2 using one, five and
ten SUs, respectively. K = 3. . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.2 MSE performance as a function of 1/σ2 of all three PU signals using one,
five and ten SUs, respectively.MSE performance of all three fusion tech-
niques. Number of SUs collaborating is fixed at 10. . . . . . . . . . . . . . 38
vii

4.3 The percentage of correct detections as a function of 1/σ2 for various con-
figurations. K = 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.4 MSE performance for different configurations. . . . . . . . . . . . . . . . . 40
4.5 Probability of correct detection ofK as a function of the shadowing variance
ρ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.6 Optional caption for list of figures . . . . . . . . . . . . . . . . . . . . . . . 43
4.7 Optional caption for list of figures . . . . . . . . . . . . . . . . . . . . . . . 44
4.8 The probability of correct detection as a function of the number of SUs.
ρ =10dB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.9 MSE of estimation of ω1 as a function of the number of SUs. ρ =10dB. . . 45
4.10 Optional caption for list of figures . . . . . . . . . . . . . . . . . . . . . . . 46
C.1 Tracy-Widom density plots, corresponding to the values of β = 1, 2 . . . . 54
D.1 Illustration of the performance of the k-means algorithm, when initialized
with eight centers (a) and four centers (b). . . . . . . . . . . . . . . . . . . 56
D.2 Iterative algorithm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
viii

CHAPTER 1
INTRODUCTION
1.1 Spectrum scarcity and Cognitive Radio
Figure 1.1: Spectrum utilization.
The fixed spectrum assignment policy which characterizes today’s wireless network
has worked well in the past. But recently there has been a dramatic increase in the
access to the limited spectrum by various services. In addition, many portions of the
spectrum are used sporadically as illustrated in Fig 1.1. As seen in the figure the spectrum
usage is concentrated on certain portions of the spectrum while a significant amount
of the spectrum remains unutilized. A recent study from the Federal Communications
Commission (FCC) have shown that the variations in the utilization of the assigned
spectrum vary from 15% to 85% [1], which makes the efficient utilization of these bands
1

a more significant problem than the scarcity of the spectrum [2].
Spectrum utilization can be improved if the users are more aware of the radio environ-
ment around them. Cognitive Radio (CR), with its ability to sense its radio environment
and exploit the information to opportunistically find unused frequency bands which is
best suited for the user’s communication requirements, is viewed as a novel approach to
improve spectrum utilization. [3] has provided the following definition of a cognitive radio.
”Cognitive radio is an intelligent wireless communication system that is aware of its
surrounding environment (i.e., outside world), and uses the methodology of understanding-
by-building to learn from the environment and adapt its internal states to statistical vari-
ations in the incoming RF stimuli by making corresponding changes in certain operating
parameters (e.g., transmit-power, carrier-frequency, and modulation strategy) in real-time,
with two primary objectives in mind:
• highly reliable communications whenever and wherever needed;
• efficient utilization of the radio spectrum.”
The major tasks of a cognitive radio can then be classified as [3]:
• Radio scene analysis: In this task we deal with detecting the unused frequency
band. The other task is to determine the interference temperature, which provides
a measure of the acceptable amount of interference at a particular frequency band at
the receiver side, so any transmission in the band is considered to be sat- isfactory if
the noise is below the interference limit and is considered to be harmful if the noise
is above the interference temperature limit.
• Channel state estimation: The focus is on determining the channel capacity for
which the state of the channel also needs to be determined.
• Spectrum management: The main goal of this task is efficient spectrum sharing of
the vacant channels detected in the radio scene analysis stage. This can be achieved
by an appropriate channel allocation scheme, power allocation scheme and proper
selection of modulation strategies, etc.
2
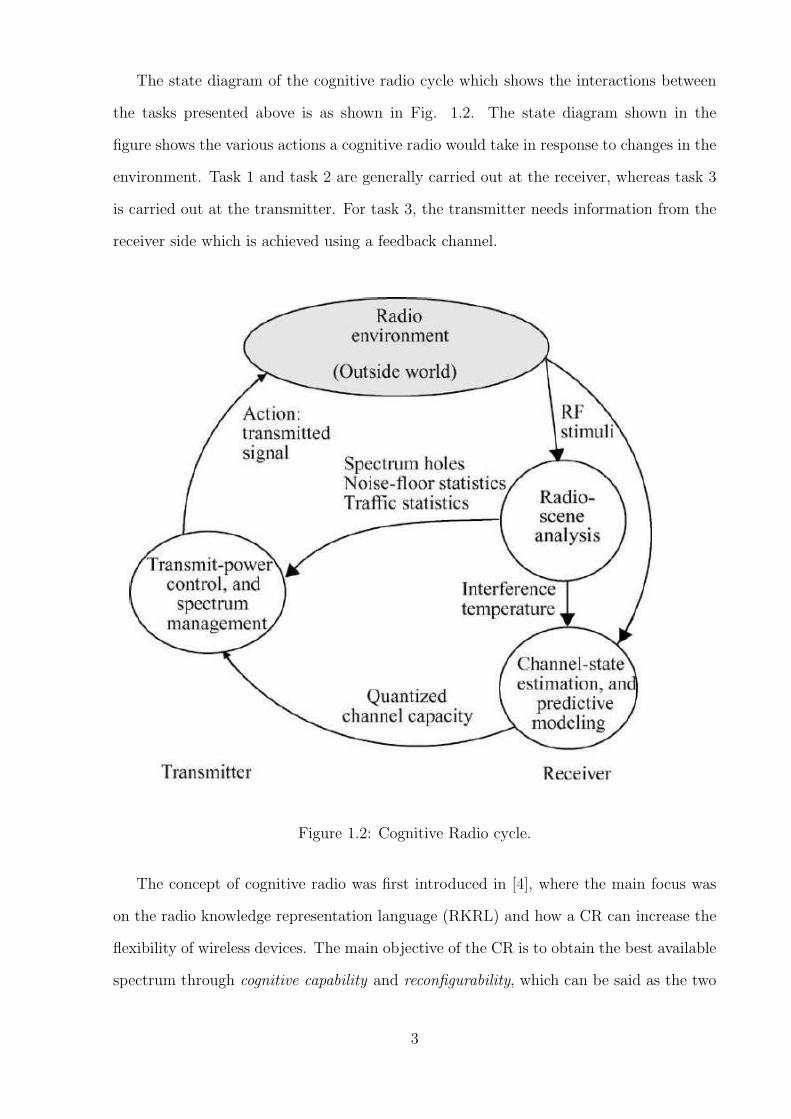
The state diagram of the cognitive radio cycle which shows the interactions between
the tasks presented above is as shown in Fig. 1.2. The state diagram shown in the
figure shows the various actions a cognitive radio would take in response to changes in the
environment. Task 1 and task 2 are generally carried out at the receiver, whereas task 3
is carried out at the transmitter. For task 3, the transmitter needs information from the
receiver side which is achieved using a feedback channel.
Figure 1.2: Cognitive Radio cycle.
The concept of cognitive radio was first introduced in [4], where the main focus was
on the radio knowledge representation language (RKRL) and how a CR can increase the
flexibility of wireless devices. The main objective of the CR is to obtain the best available
spectrum through cognitive capability and reconfigurability, which can be said as the two
3
main characteristics of the CR.
• Cognitive capability : Cognitive capability is the ability of the radio to sense the
information from its radio environment. This cannot simply be realized by moni-
toring the power levels in some frequency band of interest but more sophisticated
techniques are required in order to capture variations in the radio environment and
avoid interference to the licensed users. Through this capability, the unused portions
of the spectrum at a specific time or location can be identified. The best spectrum
and other operating parameters can be then selected.
• Reconfigurability : Reconfigurability enables the radio to be dynamically programmed
according to the radio environment. The CR can be programmed to transmit and
receive on a variety of frequencies and also change its parameter like power level,
modulation technique etc.
From the above two characteristics we see that once the CR senses the radio environ-
ment and chooses the best available channel, it should be able to change all its protocols
in order to suite the conditions in the available spectrum. Hence a lot of new functional-
ities are required to be added to the existing protocols in order to achieve the cognitive
ability.
The major tasks of a CR cycle can be summarized as follows:
• Spectrum sensing: CRs do not have any licensed frequency band to work with.
Through spectrum sensing they identify unused frequency bands for their operation.
This process has to be fast enough to go through a large chunk of the spectrum
quickly and accurate enough to not miss any unused band while maintaining the
false alarm rates.
• Spectrum management: Once the unused bands are recognized, the CR must choose
the best available spectrum for its communication needs.
• Spectrum mobility: When a communication has been established between CRs there
can be cases wherein the licensed user comes back again. The CRs must be able to
4

maintain seamless communication during the transition to another spectrum. This
function is analogous to the hand off function in cellular networks.
• Spectrum sharing: When many CRs coexist in the same area, a fair spectrum
scheduling method should be provided amongst them.
The ultimate objective of a CR is to obtain the best available spectrum. Since most of
the spectrum is already assigned, the most important challenge is to share the spectrum
without interfering with the transmission of licensed users. Through spectrum sensing,
the CR is able to find temporally unused spectrum, which is referred to as spectrum hole
or white space. If the licensed user comes back then the CR has to use other spectrum
holes or alter its transmission power to avoid interference. The spectrum hole concept is
further illustrated with the help of Fig 1.2.
Figure 1.3: Spectrum hole concept.
1.2 Motivation
From the above functionalities we can say that the spectrum sensing is the most important
part of the CR cycle. There are several approaches for sensing which are proposed includ-
5

ing matched filter detection, energy detection and the cyclocstationary feature detection
. The energy detector being a non coherent detection method is the most widely used
method since it proves to be more robust against multipath fading than the methods men-
tioned above. However, the energy detector is vulnerable to noise uncertainty and needs
to have an accurate knowledge of the noise floor. Another disadvantage of the above men-
tioned detection schemes is that they are narrowband, i.e., they concentrate one channel
at a time. Wideband sensing methods makes the spectrum sensing more efficient as they
sense the whole bandwidth in one go. For wideband sensing we use signal estimation and
detection methods using the eigendecomposition of statistical covariance matrices. These
methods can be broadly classified as subspace methods and the eigenvalue decomposition
separates the so-called structured (carrier signal) and the unstructured (noise) compo-
nents. The successful decomposition of the eigen values and eigen vectors provides a lot
of information about the properties of a spectrum band. The problem of estimating the
sinusoidal frequencies from uniformly sampled measurements has received considerable
attention in signal processing. There are many established methods such as MUSIC and
ESPRIT(also known as SURE) where the properties of the sinusoidal frequency estimates
are fairly understood.
Although the above mentioned methods provide an accurate estimate of the frequen-
cies, the estimation done at a particular CR always has a higher chance of error than when
done centrally. This happens due to the multipath and shadowing effects of the wireless
channel. Shadowing can cause the secondary user to completely miss the detection of a
particular primary user. Co-operation between several CRs can help combat shadowing
and fading effects. This method is very robust against severe shadowing environments as
the probability of all users in deep fade is very low. On the other hand due to the high
frequency values used for communication (typical operation occurs in the GHz range) the
effects of multipath fading vary significantly with minute displacements of the secondary
user (consider a band at 3 GHz, the wavelength at this range is 10 cm. So a displacement
of 2.5 cm will cause a phase shift of 90 degrees). To combat multipath effects the use of
multiple antennas at the secondary user is also suggested.
6

The main advantage of Co-operative schemes is that they provide better immunity to
fading and shadowing effects even when the channel is poorly modeled. Spatial diversity
has been explored extensively in wireless communication to combat fading. It can be
similarly applied in the context of spectrum sensing and such cooperation among several
secondary users provides significant advantages in alleviating the effect of destructive
channel fading. While most of the existing cooperative spectrum sensing schemes are
built on narrowband sensing approaches such as energy detection, there has not been
much focus on cooperative schemes for wideband sensing. Wideband sensing techniques
such as wavelet and subspace methods pose the problem of estimating the locations of
PU signals in the frequency domain. When cooperation is involved, we face the challenge
of grouping the estimates from different CRs that correspond to the same PU signal, i.e.,
the data association problem. Another important issue that should be addressed while
combining estimates is whether the fusion method is insensitive to a few bad estimates.
Bad estimates are defined as the estimates which are generated from false alarms and are
assumed to have significant errors. These issues motivate the use of the robust technique
for the fusion procedure.
In this paper, a cooperative wideband sensing scheme based on the subspace method
is explored. Specifically, the eigen-decomposition of the sample covariance matrix is con-
ducted at individual secondary users equipped with multiple antennas. The estimation
results regarding the number of primary signals and their corresponding carrier frequen-
cies within the band of interest (BOI) are combined at a fusion center. We address the
problem of data association through robust clustering techniques using the k-means al-
gorithm and the minimum description length (MDL) principle, which help not only in
grouping the estimates but also in rejecting bad estimates as outliers. In order to obtain
the optimal form of the linear fusion rule, the variances of the local frequency estimates
are derived using the bootstrap method, which is shown to improve the accuracy of final
estimates compared to using the existing result of the asymptotic variance for a large
number of samples. The effects of fading can be effectively suppressed through the collab-
oration among secondary users using the proposed method, leading to improved detection
7
performance and more accurate carrier frequency estimation.
1.3 Organization of Thesis
The remainder of the thesis is organized as follows. A literature review is presented
in chapter 2 wherein we have an overview of the various methods used for spectrum
sensing including some of the latest ongoing work. The problem under consideration is
formulated in section 3.1. In Section 3.2, the subspace method for spectrum sensing at
each SU using multiple antennas is derived. The cooperative scheme by combining local
estimates is proposed in Section 3.3. Chapter 4 demonstrates the effectiveness of the
proposed algorithm through simulations. Conclusions and future work are provided in
the last chapter.
8

CHAPTER 2
Literature review
Being the focus of this thesis, spectrum sensing by far is the most important component
in the cognitive radio cycle. Spectrum sensing is the task of getting to know the spectrum
usage and the existence of licensed PUs in a particular geographical area. This can be
achieved by using geolocation and database, beacons, or by local spectrum sensing at
SUs. There are many challenges which the spectrum sensing cycle poses to a CR. Some
of them can be listed as:
• Hardware Requirements : Spectrum sensing requires a CR to sense vast parts of the
spectrum in a short duration of time. This means that a CR should be equipped
with a sophisticated RF front end, have high resolution ADCs and must have a lot
of signal processing blocks.
• Hidden Terminal Problem: The hidden terminal problem is a very common occur-
rence in wireless networks. For a CR this is poses a bigger problem since it cannot
afford to miss out the presence of a particular PU. Cooperation is often used as a
solution to this problem and is discussed in detail in the next section.
• Spread Spectrum Users : For commercial wireless applications there are two kinds
of users: fixed spectrum and spread spectrum users. Spread spectrum users are
particularly hard to detect since they occupy large parts of the spectrum at low
powers. This problem can be avoided to an extent if perfect synchronization is
achieved and the hopping sequence is known. however, it is not straightforward to
design algorithms to detetct such users.
• Security : A malicious CR can emulate a PU signal to hog the entire bandwidth in
a particular area. This will render all the CRs in that area useless. Therefore, the
9
spectrum sensing should be able to differentiate between a signal and the actual PU
signal. Various methods have been proposed to counter the issue like checking the
coordinates of the sensed signal and identifying unique signatures of the PU signals.
• Sensing Frequency and Duration: A CR cannot spend all its time in sensing. The
performance of the most of the sensing algorithms greatly increase with the increase
in the number of samples take. A bound must be kept on this metric so that the
duration is minimized for the required performance levels. The frequency of sensing
is another issue that a CR must think about. If a PU signal is known to use the
spectrum frequently then the CR must increase the frequency of sensing and vice
versa.
The main focus is on the local spectrum due to its lower infrastructure requirements
and broader applications. Although spectrum sensing has been generally known as mea-
suring the radio frequency energy over the spectrum; when cognitive radio is considered,
it becomes a more general term involving knowing the spectrum usage characteristics,
determining the number of signals and their modulation techniques, bandwidth, carrier
frequency etc.. This chapter will first focus on the conventional spectrum sensing tech-
niques and then move on to explain some of the latest literature on spectrum sensing.
2.1 Conventional Spectrum Sensing Techniques
2.1.1 Matched Filter
Since a matched filter maximizes the signal to noise ratio, it is the optimal method for
any kind of signal detection [5]. However, matched-filtering requires the cognitive radio
to demodulate the received signals and therefore needs prior information about the sig-
nal, e.g., the packet length, the modulation type, pulse shaping. Although these can be
worked around by storing them in the cognitive radio memory, the main problem of the
matched filter is that it has to attain coherency for demodulation by performing synchro-
nization and channel equalization. For certain class of primary users this is still possible
as they provide synchronization details through pilots, preambles and spreading codes.
10

The advantage of a matched filter is that it requires the lowest amount of computational
complexity to achieve the required performance levels. However, as explained before, the
drawback is that cognitive radio will be required to store a lot of information about pri-
mary users and it also needs to change the receiver characteristics for different types of
primary users [6].
2.1.2 Energy Detector
Energy detector is a suboptimal detector that performs noncoherent detection. The work-
ing of a energy detector is similar to that of a spectrum analyzer where the received signal
is first sampled, then converted to the frequency domain by taking the fast fourier trans-
form (FFT) followed by squaring the coefficients and then taking the average. This value
is then compared to a predetermined threshold to check for the presence of a PU [8].
The whole process is outlined in Fig 2.1 [7]. Processing gain of an energy detector is
directly proportional to the number of bins used and observation time. However, the
computational time time is much more than that of the matched filter which is expected
due to the non-coherent feature [9]. Due to its simplicity and the non requirement of prior
knowledge, the energy detector becomes a very popular choice for spectrum sensing. But
there are several drawbacks that restricts its usage. First, the performance of a energy
detector is strongly related to the choice of the threshold, which makes the method highly
susceptible to unknown or changing noise levels. Second, energy detectors cannot differ-
entiate between a PU, noise and other SUs. Lastly, an energy detector does not work for
advanced modulation schemes like spread spectrum and frequency hopping techniques.
Figure 2.1: Implementation of an energy detector.
11

2.1.3 Cyclostationary Feature Detection
Most of the PU signals are coupled with sine waves, cyclic codes, pilot signals and/or
hopping sequences which result in built-in periodicity. The periodicity is introduced
intentionally so that a receiver can use them for estimating the carrier phase, the pulse
timing etc. This property can be used for signal detection of a particular type in the
presence of random noise and other signals. For cyclostationary signals the spectral
correlation function (SCF) has been introduced which is also known as the cyclic spectrum
[10]. Signal analysis in the cyclic spectrum domain preserves the phase and frequency
information related to timing parameters in modulated signals. As a result, the cyclic
spectrum shows unique features of modulated signals which are not seen by the power
spectral density [11]. When different types of modulated signals are analyzed, the cyclic
spectrum produces distinct results even though their power spectral densities turn out
to be identical. Implementation of cyclostationary feature detection is as shown in Fig.
2.2. From the figure we can see that the cyclostationary feature detection is similar to
the energy detector except that it has an added block which does the correlation. The
last block of the Fig. 2.2 depicts a feature detector which analyzes the SCF to estimate
the number of signals in the band of interest, their modulation types and the presence of
interferes [12].
Figure 2.2: Implementation of a cyclostationary feature detector.
2.2 Narrow Band Spectrum Sensing Techniques
Recently there has been a lot of interest in new methods of spectrum sensing that can
improve detection performance and recognize modulation type, the number and type of
signals in low SNR regimes. A new class of spectrum sensing technique called the blind
12

spectrum sensing method is introduced in [13] - [16]. As discussed in section 2.1, for con-
ventional spectrum sensing techniques, some kind of information about the primary user
or the accurate knowledge of the noise floor is needed. In blind spectrum sensing tech-
niques, there is no need for any kind of information that has to be predetermined. [13] uses
Akaike weights as a decision metric for the presence of a PU signal. The Akaike weights
can be interpreted as an estimate of the probability that the received signal distribution
fits the Gaussian one. Since pure noise can be modeled by a Gaussian distribution, an
empty band can be detected by analyzing the Akaike weights information. In [14], the
authors use the properties of eigenvalues of the signal covariance matrix for detection
purposes. The ratio of the maximum and minimum eigenvalues of the covariance matrix
is proposed as a statistic for signal detection. In [15] a modified energy detector is intro-
duced wherein, instead of directly comparing the received signal energy with a threshold
(which is the predetermined noise floor), the ratio of the signal energy and the minimum
eigenvalue of the signal covariance matrix is compared to a threshold. The difference here
is that this new threshold can be derived from the input samples by using the random
matrix theory and does not depend on the knowledge of the noise floor. Further analysis
is conducted in [16] and through new results in random matrix theory, the true distribu-
tion of the maximum and minimum eigenvalues of the signal covariance matrix is derived.
This makes the detector more accurate and its results tractable. Apart from using the
eigenvalues of the covariance matrix [17] directly uses the elements of the covariance ma-
trix for its detection purposes. Since noise is uncorrelated, its covariance matrix diagonal,
therefore the ratio of the diagonal elements to the non diagonal elements tends to be
larger if a PU is present. The threshold chosen for this detector can also be derived using
random matrix theory and is independent of the noise variance.
Although the covariance matrix based detection and maximum-minimum eigenvalue
detection are not related to noise uncertainty, their performances tend to degrade signif-
icantly at low SNR. [18] talks about improving the low SNR performance by using the
non-Gaussian property of a PU signal. The proposed algorithm calculates the statisti-
cal difference between the Gaussian noise and the primary user signal by applying the
13

Bussgang theorem. The Bussgang theorem states that when a real Gaussian stationary
process passes through a memoryless nonlinear device, the crosscorrelation function of
the input and the output is proportional to the autocorrelation function of the input [19].
Using this theorem [18] provides a statistical test to differentiate between a PU signal
and pure Gaussian noise. Going on the same lines of detecting a change of the statistical
properties of the received signal, [20] proposes a new spectrum sensing technique which
uses the quickest detection theory. Statistical tests are carried out to detect the change of
the observation distribution as quickly as possible. This helps us attain quick and robust
spectrum sensing. The well known cumulative sum (CUSUM) algorithm is modified to
include the generalized likelihood ratio test to form a new algorithm called successive
refinement.
The use of neural networks for signal classification is proposed in [21], where the
authors use the cyclostationary feature detector and combine it with a neural network set
to form a system which not only performs signal detection but also signal classification.
2.3 Wide Band Spectrum Sensing Techniques
Till now all the spectrum sensing methods that have been described have one thing in
common, they concentrate on one channel at a time. Having a sensing algorithm which
can scan a wide band of interest (BOI) at once is very advantageous since it reduces the
sensing time and also helps spectrum management algorithms get the information about
all the free bands at once.
Multicarrier communications generally use filter banks at the receiver side to effectively
demodulate the signals. [3] and [22]propose to use these filter banks to double up as
a spectrum analyzer. Thus signal analysis comes at no additional cost as the output
of the filter banks gives you the power spectral density of all the carrier frequencies
used for communication. Another approach is to use a tunable narrowband band pass
filter at the RF front end of the CR, over which the usual narrowband spectrum sensing
techniques can be performed. Recently, the same idea is adopted in [23] for OFDM
communication systems. Multiple sub bands are assumed to be present in which only
14
some of the orthogonal channels are being used by PUs. To detect the number of free
channels, the signal is received and demodulated into subbands by the discrete fourier
transform process and the subchannels are then checked for the presence of a PU by jointly
optimizing a bank of multiple narrowband detectors (energy detector)in order to improve
the opportunistic throughput capacity of cognitive radios. In general, a PU may use larger
bandwidth than just a subband, that is, a subset of adjacent subbands simultaneously.
In such a scenario, the spectrum monitoring can be considerably enhanced provided that
the SU has some knowledge about the group of subbands which may be occupied by a
specific PU [24]. By grouping, it means the integration of the information obtained from
such a group of subbands. All subbands in a group will have a common status regarding
the presence or the absence of the PU. Therefore, only one binary hypothesis is required
for a given group which results in a faster and more accurate spectrum sensing.
Wavelets have been used for wideband sensing [25] [26]. Given the power spectral
density (PSD) of the spectrum, a wavelet transform can be used to detect the edges
where transition from an occupied band to an empty band or vice versa occurs. By
looking at the power levels between these edges, the frequency spectrum can be classified
as empty or not.
2.4 Collaborative Spectrum Sensing
As mentioned in section 1.2, sensing done at a single SU is not always reliable, irrespective
of the accuracy shown by the method used. Fig. 2.3 shows a simple scenario where the
advantage of collaborative sensing is observed. The most common problem faced by
an SU is depicted in Fig. 2.4. As we can see, cognitive radio (CR) C is out of the
transmission range of PU A, and can miss out the presence of the PU. This will cause
interference when it tries to communicate with CR B. This is commonly known as the
hidden terminal problem. Another issue faced by a CR terminal, which is also generally
present in wireless networks is the exposed terminal problem. In Fig. 2.5, CR C can be
termed as the exposed terminal. CR C cannot communicate with CR D because it is
“exposed” to the transmission of PU B. The problem here is that CR C does not know
15
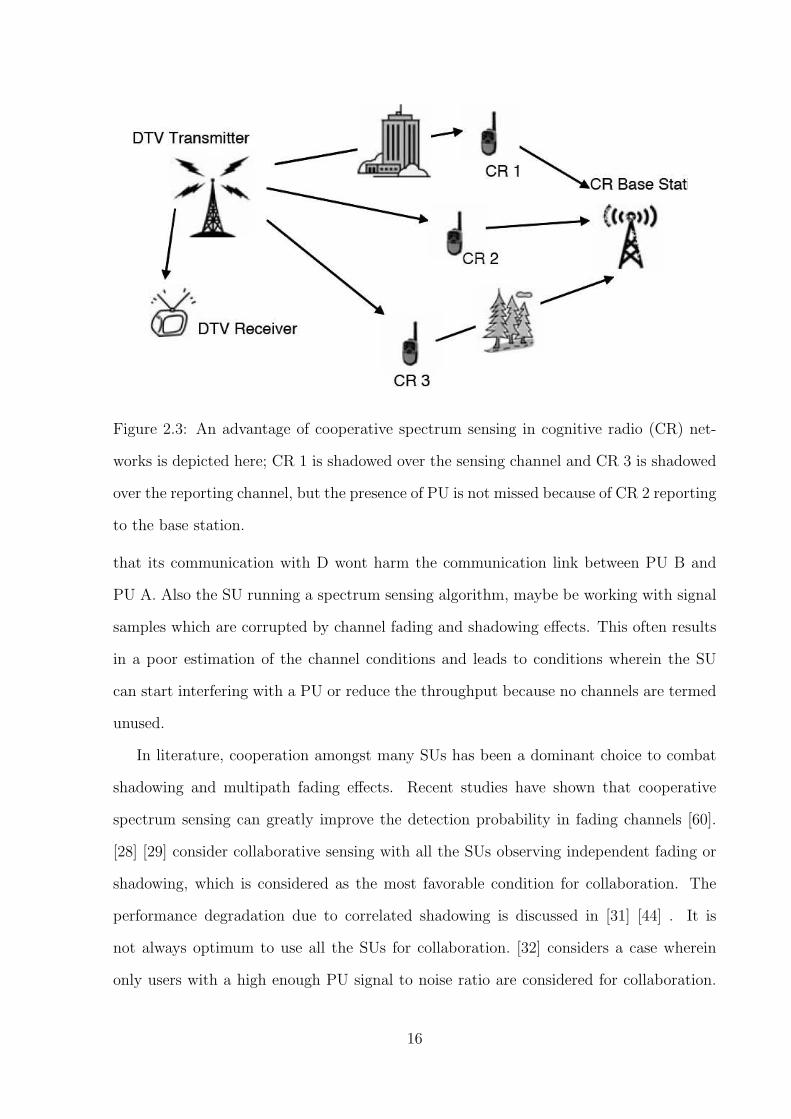
Figure 2.3: An advantage of cooperative spectrum sensing in cognitive radio (CR) net-
works is depicted here; CR 1 is shadowed over the sensing channel and CR 3 is shadowed
over the reporting channel, but the presence of PU is not missed because of CR 2 reporting
to the base station.
that its communication with D wont harm the communication link between PU B and
PU A. Also the SU running a spectrum sensing algorithm, maybe be working with signal
samples which are corrupted by channel fading and shadowing effects. This often results
in a poor estimation of the channel conditions and leads to conditions wherein the SU
can start interfering with a PU or reduce the throughput because no channels are termed
unused.
In literature, cooperation amongst many SUs has been a dominant choice to combat
shadowing and multipath fading effects. Recent studies have shown that cooperative
spectrum sensing can greatly improve the detection probability in fading channels [60].
[28] [29] consider collaborative sensing with all the SUs observing independent fading or
shadowing, which is considered as the most favorable condition for collaboration. The
performance degradation due to correlated shadowing is discussed in [31] [44] . It is
not always optimum to use all the SUs for collaboration. [32] considers a case wherein
only users with a high enough PU signal to noise ratio are considered for collaboration.
16
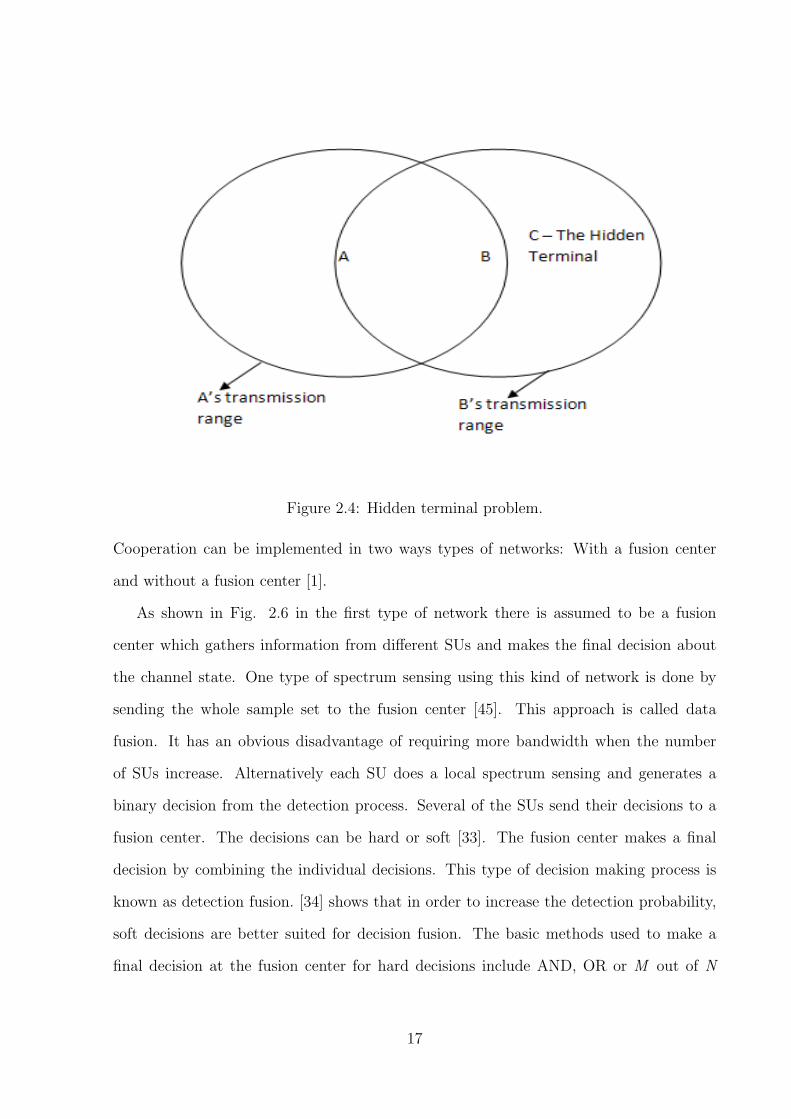
Figure 2.4: Hidden terminal problem.
Cooperation can be implemented in two ways types of networks: With a fusion center
and without a fusion center [1].
As shown in Fig. 2.6 in the first type of network there is assumed to be a fusion
center which gathers information from different SUs and makes the final decision about
the channel state. One type of spectrum sensing using this kind of network is done by
sending the whole sample set to the fusion center [45]. This approach is called data
fusion. It has an obvious disadvantage of requiring more bandwidth when the number
of SUs increase. Alternatively each SU does a local spectrum sensing and generates a
binary decision from the detection process. Several of the SUs send their decisions to a
fusion center. The decisions can be hard or soft [33]. The fusion center makes a final
decision by combining the individual decisions. This type of decision making process is
known as detection fusion. [34] shows that in order to increase the detection probability,
soft decisions are better suited for decision fusion. The basic methods used to make a
final decision at the fusion center for hard decisions include AND, OR or M out of N
17

Figure 2.5: Exposed terminal problem.
logic [32]. [61] goes further to prove that from the detection performance point of view
having a hard decision approach can almost work as good as the soft decision approach
when the number of SUs is large. [36] proposes sending quantized decisions to the fusion
center. The Chair-Varshney [37] rule gives the optimum rule for combining information
coming from sensors and is derived based on a log-likelihood ratio test. [42] uses the
Dempster-Shafers theory of evidence to combine the information coming from different
SUs. By classifying SUs according to their reliabilities, [43] has shown better results than
when taking into account the decisions from all the SUs in the network. The reliability
quotient of a SU is decided by taking into account the channel conditions and their
distance from a PU. The number of nodes required to satisfy certain false alarm constraint
is studied in [44]. In order to reduce the bandwidth required for the communication not
only is a hard decision implemented but also censoring of the nodes is used [46]. Censoring
can be implemented by using two threshold values instead of one.
Fig. 2.7 shows a schematic of the second type of network where the idea of a fusion
center is taken out, thus reducing the extra cost of having a backbone infrastructure.
Information is exchanged amongst many SUs, but the final decision on the which part of
18

spectrum to use is taken locally. This type of spectrum sensing architecture for cogni-
tive radio is studied in [47] [48] [49]. Observations at different SUs are shared amongst
neighbors to improve the sensing abilities of the whole network. In order to reduce the
bandwidth used for communication, [50] proposed the exchange of only the final decision
of the sensing process. Clustering of SUs without the help of a central unit is discussed
in [51]. A SU with a high PU SNR or closer to the PU will collaborate and form a cluster
with other SUs who are far away. This will help all the SUs in the cluster make a correct
decision. An incremental gossiping approach termed as GUESS (gossiping updates for
efficient spectrum sensing) is proposed in [52]. The algorithm helps in the coordination
between the SUs with advantages like low complexity and minimum protocol overhead. To
increase the efficiency in coordination, incremental aggregation and randomized gossiping
algorithms are also studied in [52].
External sensing is another approach wherein the sensing task is taken away from the
SUs. An external agent performs the sensing and broadcasts information regarding the
available channels to the SUs. The advantages include reduced complexity at the SUs and
since the sensing agents need not be fixed on mobile SUs which need to be powered by
batteries, power consumption does not become an issue any more. A sensor node detector
architecture is used in [53] wherein a network of sensing nodes look for passive receivers
by measuring the local oscillator (LO) power leakage. This information is then passed on
to the SUs who are inside the PU communication range through a control channel. [54]
adopts a similar architecture in which a dedicated network of sensing devices sense the
channel periodically and reports to a central node which then fuses all the information and
generates a report of the channel conditions which is then broadcast to the SUs. External
sensing is one of the methods proposed for identifying PUs in IEEE 802.22 standard [55].
19

Figure 2.6: Collaborative sensing with a fusion center.
20

Figure 2.7: Collaborative sensing without a fusion center.
21
CHAPTER 3
Subspace-based Cooperative spectrum sensing
3.1 Problem Formulation
Assume that there are Q secondary users trying to access the spectrum opportunistically,
with each user having Dq antennas, q = 1, 2, . . . , Q. There are K PU signals in the
bandwidth of interest, each with a carrier frequency fk, k = 1, 2, . . . , K. ωk is defined as
ωk = 2πfk∆T rad/sample, where ∆T is the sampling interval. The sampled signal sensed
at the dth antenna of the qth secondary user, d = 1, 2, . . . , Dq, can be expressed using the
following model,
zqd(n) =K∑
k=1
hqdkSk(n)ejωkn + wqd(n) n = 1, 2, · · · , N (3.1)
Here, hqdk is the complex channel gain for the kth PU signal at the dth antenna of the
qth secondary user. It is assumed to be zero mean1 and statistically independent across
antennas, SUs and PU signals. Sk(n) is the sample complex envelope of the kth PU signal
and is assumed to be a wide-sense stationary random process. wqd(n)Nn=1 is a sequence
of white Gaussian noise with mean zero, variance σ2 and is assumed to be statistically
independent across secondary users and their antennas. For most communication systems,
transmitted signals generally experience slow fading [63]. Therefore, we assume that the
channel gains do not change for the N samples. wqd(n)Nn=1 is a sequence of white
Gaussian noise with mean zero, variance σ2 and is assumed to be statistically independent
across secondary users and their antennas.
Fig. 3.1 shows the PSD of a wide BOI of interest. As we can see that there are
many kinds of signals each centered at different carrier frequencies and occupying dif-
1It is assumed to be a homogeneous scattering environment without line of sight.
22

ferent bandwidths.The objective is that based on the collected data sample zqd(n), Q
secondary users try to determine collaboratively how many carriers (what is the value of
K?) are occupied and what are they (what are the fk’s?). One approach is to collect all
these data samples at a central unit for centralized processing. This approach is straight-
forward, albeit it incurs a large amount of data transmission. The advantages of cognitive
radio diminish due the large overhead for spectrum sensing. Distributed processing is
more desirable and the cooperation of many SUs is realized through combining the most
important information from the individual users for the sensing task. The subsequent
tasks include extracting more detailed information regarding signal types and bandwidth
occupied. The secondary users will then try to access the unoccupied bandwidth oppor-
tunistically for data transmission. The second task is beyond the scope of this thesis and
only the sensing part is considered in this thesis.
Figure 3.1: PSD of a wide BOI.
3.2 Subspace-based spectrum sensing algorithm
In distributed sensing, each SU first processes locally collected measurements to esti-
mate the number of primary user signals and their carriers. Let zqd(n) be a vector
of m consecutive samples at the dth antenna of a secondary user SUq, i.e., zqd(n) =
[zqd(n), zqd(n+1), · · · , zqd(n+m− 1)]T . m is selected such that K < m ≪ N. Compared
23

with the sampling rate 1/∆T , signal Sk(n) can be considered as a slow-varying process.
We can assume that within m consecutive samples, Sk(n) ≈ Sk(n+ i), i = 1, . . . ,m− 1,
especially when m is small. The complete signal model at SUq can be represented in the
following matrix form
Zq(n) = [zq1(n), zq2(n), · · · , zqDq(n)]
= AS(n)Hq +Wq(n)(3.2)
where,
A =
1 1 . . . 1
ejω1 ejω2 . . . ejωK
......
. . ....
ejω1(m−1) ejω2(m−1) . . . ejωK(m−1)
S(n) =
S1ejω1n 0
S2ejω2n
. . .
0 SKejωKn
Hq =
hj11 hj21 . . . hjDj1
hj12 hj22 . . . hjDj2
......
. . ....
hj1n hj2n . . . hjDjK
and
Wj(t) =
wj1(n) wj2(n) . . . wjD(n)
wj1(n+ 1) wj2(n+ 1) . . . wjD(n+ 1)
......
. . ....
wj1(n+m− 1) wj2(n+m− 1) . . . wjD(n+m− 1)
24

The covariance matrix of Zq(n) is given by 2
R = E[Zq(n)ZHq (n)]
= E[AS(n)HqHHq S
H(n)AH ] + E[Wq(n)WHq (n)] (3.3)
= APAH +Dqσ2I
where
P = E[S(n)HqHHq S
H(n)]
= diag
[Dq∑
d=1
|hqd1|2|S1|
2,
Dq∑
d=1
|hqd2|2|S2|
2, . . . ,
Dq∑
d=1
|hqdK |2|SK |
2
](3.4)
|Sk|2 denotes the power of the kth PU signal. Equations (3.3) and (3.4) show that when
multiple antennas are considered, the signal model resembles equal gain combining which
is used in many communication systems to combat fading. Taking eigendecomposition of
matrix R, we shall have
R = UΛUH (3.5)
where U = [u1, · · · ,um] is a unitary matrix, the columns of which are eigenvectors. Λ =
diag[λ1, · · · , λm] contains the corresponding eigenvalues. If the eigenvalues are arranged in
the descending order, i.e., λ1 ≥ λ2 ≥ ... ≥ λm, then we have λk > Dqσ2 for k = 1, 2, . . . , K
and λK+1 = ... = λm = Dqσ2 [66].
Define the signal space which is composed of the eigenvectors corresponding to λk,
k = 1, 2, . . . , K, i.e., G1 = [u1,u2, · · · ,uK ] and the noise space composed of the remaining
eigenvectors, G2 = [uK+1,uK+2, · · · ,um]. If K is known, we can obtain the estimates of
frequencies ωkKk=1 as follows [65]. Let F1 = [Im−1 0]G1 and F2 = [0 Im−1]G1, where
Im−1 is the identity matrix of dimension (m − 1) × (m − 1) and 0 is a column vector
of zeros with length (m − 1). It can be shown that the frequency estimates ωkKk=1 are
angular positions of the eigenvalues of matrix ψ, where
ψ = (FH1 F1)
−1FH1 F2 (3.6)
2We will use the notation * for conjugate, T for transpose and H for hermitian.
25

Generally, we do not have the knowledge of the covariance matrix R. The sample
covariance matrix can be used instead,
R =1
N −m+ 1
N−m+1∑
n=1
Zq(n)ZHq (n) (3.7)
which is an unbiased and consistent estimate of R.Estimation of the frequency values
from the sample covariance matrix is straightforward if the number of signals present is
known. However, K is not known a priori. We need to estimate K based on the collected
data before frequency estimation. This can be achieved by several techniques and two
such techniques are discussed in the next section.
3.2.1 Estimation of K
Estimation of the frequency values from the sample covariance matrix is straightforward
if the number of signals present is known. However, K is not known a priori. We need
to estimate K based on the collected data before frequency estimation. Two statistical
tests are now presented to estimate the number of signals.
Chi square test
Proposition: If the dimension of the noise space r is chosen correctly, i.e., r = m − K,
then the normalized sum square of the last r eigenvalues of matrix R follows a chi-square
distribution of r degrees of freedom with an error of the order O(N−1/2) [66].
Let λr = [λm−r+1, λm−r+2, . . . , λm]T . If r = m −K and the eigenvalues are obtained
from the true covariance matrix R, then these r eigenvalues have the same value Dqσ2.
Due to the noise and the finite sample size, these r eigenvalues obtained from R are not
equal to Dqσ2 any more. Let µr = E[λr] and Ω = Cov[λr]. What the proposition means
is that γr = (λr − µr)HΩ−1
r (λr − µr) ∼ χ2r with negligible error when N is sufficiently
large. If r > m − K, then the normalized sum square does not follow the chi-square
distribution. In fact, the statistic γr is much larger because of the inclusion of signal
components. This result is similar to that obtained in [66]. The difference is that [66]
deals with real sample data in a vector form while here we have complex sample data in a
26

matrix form due to multiple antennas used by the SUs. The derivation of the normalized
sum square is provided in Appendix.
This suggests that we can start with r = m (the largest possible dimension of the
noise space) and conduct the following chi-square test:
H0 : r is the correct dimension, or γr ∼ χ2r.
H1 : r is larger than the correct dimension of the noise space.
If H0 is rejected, we reduce r by 1, i.e., r = m− 1 and test if it is the correct dimension.
This procedure continues until H0 is accepted. The estimate of the number of PU signals
is then Kq = m − r. Generally, the value corresponding to a significant level of 0.1% is
selected as the testing threshold.
Tacy Widom test
As N → ∞, the sample autocorrelation matrix converges with probability one to the
population autocorrelation matrix. Hence,
λi = ϑi + σ2
where ϑi = 0, for i > K. Therefore as N → ∞, it is very easy to detect any signal. But
for finite sample values the noise eigenvalues are not all equal to σ2 but may rather have
a significant spread. As shown by various authors, the largest eigenvalue of a pure noise
matrix is of the order of σ2(1 +√K/N). This puts a threshold on the signal strengths
in order to make them identifiable. [72] has proposed a solution for an estimator for the
number of signals based on a hypothesis tests. They test
H0: at most K signals
H1: at least K signals.
To reject H0, hence accepting the alternative hypothesis H1, the K-th sample eigen-
value must be significantly larger than the quantity expected under H0. It has been shown
in [73] that the largest eigenvalue of the covariance matrix of N pure noise observations
of length m is asymptotically distributed according to a Tracy-Widom distribution.
27

limm,N→∞
Pλ1 < αm,N + sγm,N = Fβ(s)
where β=1,2 for real and complex values respectively and the expressions for αm,N
and γm,N are given in [72]. Using this property of the largest eigen value corresponding
to the noise matrix, the estimator for the number of signals can be derived as
argK maxλK > σ2(K)[αm−K,N + s(τ)γm−K,N ]
τ is the required rate of false alarm and s(τ) can be obtained by inversing the Tracy-
Widom distribution. σ2(K) is the estimator for the noise level. An important point for
this test is the accurate estimation for the noise level which is discussed in detail in [72].
More on the tracy widom distribution is provided in the Appendix.
3.3 Cooperative spectrum sensing algorithm
The subspace-based PU signal detection and their carrier frequency estimation at indi-
vidual secondary users are not robust due to shadowing effects. There might be cases
where none of the antennas on a secondary user receive signals of respectable strengths.
To combat the effects of shadowing, a cooperative scheme with a fusion center among
the secondary users is considered. Each of the SUs implements a local subspace-based
algorithm and send its estimates (ωkKq
k=1) to the fusion center. The communication cost
is much reduced compared to sending all of the collected samples to the fusion center. To
effectively fuse the estimates, the fusion center has to deal with two problems,
1. There is a necessity of data association, i.e., to decide which estimates from different
secondary users belong to the same PU signal.
2. Once associated, how to fuse the estimates from different secondary users.
3.3.1 Data Association
Assume that SUd has Kd frequency estimates ωkdKj
k=1, j = 1, . . . , Q, 0 ≤ Kj < m. The
idea behind our data association algorithm is to group those estimates that are close
28
to each other into clusters. Each cluster can have at most one frequency estimate from
each SU. The estimate after fusion of the estimates within each cluster will be the final
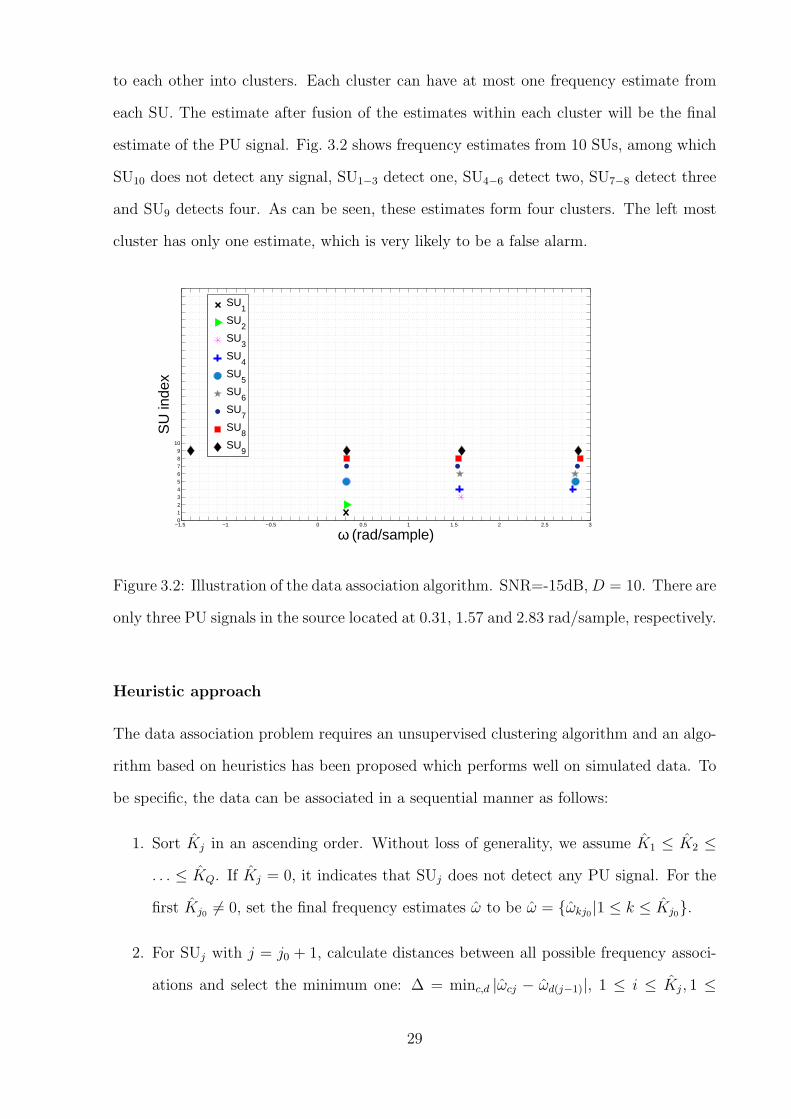
estimate of the PU signal. Fig. 3.2 shows frequency estimates from 10 SUs, among which
SU10 does not detect any signal, SU1−3 detect one, SU4−6 detect two, SU7−8 detect three
and SU9 detects four. As can be seen, these estimates form four clusters. The left most
cluster has only one estimate, which is very likely to be a false alarm.
−1.5 −1 −0.5 0 0.5 1 1.5 2 2.5 30123456789
10
ω (rad/sample)
SU
inde
x
SU1
SU2
SU3
SU4
SU5
SU6
SU7
SU8
SU9
Figure 3.2: Illustration of the data association algorithm. SNR=-15dB,D = 10. There are
only three PU signals in the source located at 0.31, 1.57 and 2.83 rad/sample, respectively.
Heuristic approach
The data association problem requires an unsupervised clustering algorithm and an algo-
rithm based on heuristics has been proposed which performs well on simulated data. To
be specific, the data can be associated in a sequential manner as follows:
1. Sort Kj in an ascending order. Without loss of generality, we assume K1 ≤ K2 ≤
. . . ≤ KQ. If Kj = 0, it indicates that SUj does not detect any PU signal. For the
first Kj0 6= 0, set the final frequency estimates ω to be ω = ωkj0|1 ≤ k ≤ Kj0.
2. For SUj with j = j0 + 1, calculate distances between all possible frequency associ-
ations and select the minimum one: ∆ = minc,d |ωcj − ωd(j−1)|, 1 ≤ i ≤ Kj, 1 ≤
29

d ≤ K(j−1). If ∆ < th where th is a predefined threshold,3 then (c0, d0) =
argminc,d |ωcj − ωd(j−1)|, indicating that ωc0j and ωd0(j−1) are the estimates of the
same PU signal. Then, remove this pair from the two frequency estimate sets and
find the data association for the next PU: (c1, d1) = argminc 6=c0,d 6=d0 |ωcj − ωd(j−1)|.
Follow these steps until all estimates in ω have been considered and possibly asso-
ciated. The frequency estimates are updated to ω = ωk(j)|1 ≤ k ≤ K(j) where
ωk(j) is the fused estimate4 of the associated estimates so far. Note that µ(d) may
be different from Kj because there may be false alarms from previous steps which
cannot be associated with any of the current list of estimates. Set j = j + 1 and go
back to step 2 until j = Q.
3. The final frequency estimates are given by ω = ωk(Q)|1 ≤ k ≤ K(Q). If ωk(Q) is
resulted from only one estimate, it is considered as a false alarm.
By removing the frequency estimates that we deem to be false alarms, we obtain the final
estimate of the number of PUs (K) and their carrier frequencies (ωkKk=1).
k-means clustering technique using the MDL principle
Using established clustering techniques like the k-means algorithm is also an option to
cluster all the frequency estimates. The main problem faced by these methods is their
dependence on the choice of the number of clusters. It has been shown that if there
has been a wrong choice of “k”, then these algorithms produce very different clustering
results [68]. Since at the fusion center we do not have any prior knowledge on the the
number of PU signals, applying algorithms such as k-means directly does not seem to be
straightforward. There have been many methods proposed in the literature which help
the k-means algorithm learn the number of clusters as it goes along.
The minimum description length (MDL) principle [69] [70] is adopted to guide the
clustering process. The idea is as follows. There are a total of∑Q
q=1 Kq frequency es-
3This step is to reduce the probability that estimates for two different frequencies be associated.
Usually, th can be chosen according to the accuracy of frequency estimation.4The fusion algorithm is provided next.
30

timates collected from all secondary users. To describe all these estimates, a total of
M∑Q
q=1 Kq bits are required, where M is the number of bits used to represent any real-
valued frequency estimates with certain precision, e.g., M=8 bits or 16 bits. In practice,
M can be determined based on the frequency range considered and the resolution that
needs to be achieved. If these estimates follow a certain pattern, e.g., form clusters in our
problem, then only the cluster centers and the errors between frequency estimates and the
corresponding cluster centers need to be described. The description length is guaranteed
to reduce because for the same precision, the number of bits required to represent the
error is smaller than that for the original data values. If there exist outliers (frequency
estimates that are false alarms), then they should be represented separately by M bits,
because to describe the difference from the nearest cluster centers may require more bits.
The best clustering result is obtained if the minimum description length is achieved, and
it provides the number of clusters (the number of PU signals) and outliers (false alarms).
The description length is a key objective function here. Given the number of clusters
K, the cluster centers C = ω1, . . . , ωK and outliers B = ωb|B|b=1 (B is a subset of
D, which is defined next), the description length for all the frequency estimates D =
ωk1K1
k=1, . . . , ωkQKQ
k=1 is composed of the following parts:
L = L1 + L2 + L3 + L4
where
L1 is the number of bits required to describe cluster centers, L1 = KM ;
L2 is the number of bits required to represent the memberships of the estimates except
outliers, L2 = (|D| − |B|)log2K;
L3 is the number of bits required to represent errors between cluster members and cluster
centers. For the same precision, the number of bits required for the error of each estimate
except outliers is proportional to the logarithm of the magnitude of error;
L4 is the number of bits required to represent outliers, L4 = |B|M .
The data association problem now becomes
minK,C,B
L
31
subject to the constraint that no two frequency estimates from the same secondary user
are in the same cluster.
Given D, the optimization problem theoretically can be solved through exhaustive
search. However, it is not computationally efficient since the number of partitions grow
exponentially with the number of the estimates. Instead, an iterative algorithm can be
adopted:
1. The algorithm is initialized with m clusters, i.e., K(0) = m, where m is the largest
possible number of PU signals.
2. At the lth iteration, the k-means clustering algorithm is used to cluster the data set
with the number of clusters as K(l−1) under the constraint that no cluster has more
than one estimate from the same SU.
3. Cluster center ωi is removed if L(−i) − L < 0, where L(−i) is the description length
when ωi is removed. When a cluster center is removed, all of its cluster members
have to be associated to new cluster centers. Care must be taken that these members
cannot be associated with any clusters which already have members from the same
SUs.
4. Outliers are identified if direct encoding requires less number of bits than as a
member of a certain cluster.
5. If no more outliers are detected, no more cluster centers are removed, and the
changes of the description lengths from step 2) are negligible, then stop and the
algorithm is said to have converged. Otherwise go to step 2), with the updated
number of clusters K(l).
This method can efficiently suppress false alarms. Since the false alarms are generated
mainly due to the noise and other random effects, the probability of them being closely
spaced is very low. Therefore they are generally termed as outliers by the MDL clustering
algorithm.
32
This iterative approach is very effective in clustering the estimates at the fusion center.
After the convergence step we are left with the number of clusters, cluster indices and
also the indices of the false alarms. The cost for this method is that it demands extra
computational power when compared to the first method. This is due to the number of
k-means runs which happen in the iterative algorithm. A more comprehensive analysis of
the iterative algorithm is provided in the Appendix.
3.3.2 Fusion of Estimates, the linear unbiased estimate
After data association, the number of clusters obtained denotes the number of PU signals
detected. Within each cluster, we have θk frequency estimates from SUs. θk can be
less than Q because some SUs may miss a certain PU signal. For optimum fusion of the
estimates obtained from different SUs, the complete statistical description of the estimates
is required. However it is very difficult to obtain analytically. It has been shown in [65]
and [64] that ωkq converges to ωk in the mean square sense using the MUSIC algorithm
and is unbiased using the ESPRIT algorithm. To simplify our analysis, we assume that
ωkq’s are unbiased. Furthermore, if an SU misses detecting the PU signal represented by
cluster k, a virtual estimate with mean ωk and variance infinity is assumed.
Based on these assumptions, we can rewrite the frequency estimates of the kth PU
signal from all SUs as the true frequency ωk plus estimation errors
ωk1
ωk2
...
ωkQ
= 1Qωk +
ωk1 − ωk
ωk2 − ωk
...
ωkQ − ωk
(3.8)
where 1Q is a Q×1 all one vector. Here, we adopt a linear unbiased estimator based on xk
to minimize the mean square error (MSE). The fused estimate for the kth PU frequency
is given by [67]
ωk = (1Qς−1k 1Q)
−11TQς
−1k xH
k (3.9)
where ςk is the covariance matrix of the estimation error ek. Since all SUs collect data
independently, ςk can be assumed to be a diagonal matrix with the diagonal elements
33

being the variance of each SU estimate. (3.9) can be further simplified as
ωk =
1σ2
k1
ωk1 +1
σ2
k2
ωk2 + · · ·+ 1σ2
kQ
ωkQ
1σ2
k1
+ 1σ2
k2
+ · · ·+ 1σ2
kQ
(3.10)
This is a weighted sum of the local estimates and the weights are inversely proportional to
the estimation variances. For those SUs missing the kth PU signal, since their estimates
have infinite variance, they do not appear in (3.10). This implies that in practice, we can
simply ignore those SUs for the kth PU frequency estimation.
The proposed estimator requires the knowledge of variances of the local estimates.
Its performance depends on how accurate the information we have. We now provide two
methods to obtain the variance.
Asymptotic variance
It has also been shown in [65] that the large sample variance of the frequency estimate is
inversely proportional to the square of the SNR, where the proportionality factor depends
on m and the relative locations of the frequencies (not the frequency values themselves).
Specifically, at SUj,
1
σ2kj
∝ SNR2kj =
(λkj − σ2
j
σ2j
)2
(3.11)
where the noise power σ2j at SUd can be estimated as follows
σ2j =
1
m− Kj
m−Kj∑
k=1
λKj+k (3.12)
Bootstrap Variance
The bootstrap is a data-based simulation method for statistical inference. It is a practice of
estimating properties of an estimator (such as its variance) by measuring those properties
when sampling from an approximating distribution. In the case where a set of observations
can be assumed to be from an independent and identically distributed population, this
can be implemented by constructing a number of resamples of the observed dataset, each
of which is obtained by random sampling with replacement from the original dataset.
Bootstrapping for dependent data is a tricky process with respect to the methods used
34

for resampling the data. The resampling must be such that it preserves the dependence
structure. We propose to use the random subsampling method for our variance estimation.
In this method, resampling is done by choosing consecutive observations of length smaller
than that of the whole sample set. If N is the total length of samples and θN is an
estimate whose variance we want to estimate. Using random subsampling we draw a p
set of samples s1, s2, s3...., sp all of length l < N . The estimate θsi,l is computed each time
and the variance of θN is given by [71]
σ2 =l
Np
p∑
i=1
(θsi,l −1
p
p∑
i=1
θsi,l)2 (3.13)
Since the estimates are carried out p times, we will now have multiple estimates at
one particular SU. This case can be analogous to the fusion center having p users. To
get the final estimate we use the same data association algorithm that is being used at
the fusion center. After association the final estimate will be the sample mean and the
variance will be given by (3.13).
35
CHAPTER 4
Simulations
In this chapter, we present simulation results that illustrate the performance of the pro-
posed subspace-based cooperative spectrum sensing method. The chapter is broken down
into two sections. Section 4.1 demonstrates some of the earlier work done on the algo-
rithm wherein only small scale fading was considered. The clustering approach used was
the one based on heuristics.
4.1 Fading only
We consider a scenario wherein a group of D secondary users try to estimate the number
of primary user signals and their corresponding carrier frequencies. There are K = 3
primary users assumed to be centered at 100Hz, 500Hz and 800Hz.1 Furthermore, each
PU has a QPSK modulated signal with unit energy. The signals are subjected to random
channel gains and additive complex Gaussian noise with σ2 varying from 20dB to 0dB.
The dimension of the sample covariance matrix, m has to be greater than the maximum
number of possible PU signals in the BOI. In the experiment, m is set to be 10. This
indicates that the maximum number of signals that can be detected at any SU is 9.
Within 1s, each SU collects 2000 samples and implements the subspace-based method to
estimate the number of PUs and their carrier frequencies. The estimated frequencies and
their corresponding SNRs are sent to the fusion center and are combined by the global
fusion algorithm presented in the previous chapter. The channel gain hqdk = αqdk, where
αqdk follows a complex Gaussian distribution with zero mean and unit variance,
1These frequency values are chosen for illustration purpose only. For a more realistic scenario where
the BOI is at much higher frequency spectrum, it can be first converted to a lower frequency range using
mixers. The sampling rate and duration can be adjusted accordingly to avoid ambiguity.
36

For different values of noise power, the percentage of correct detections is shown in
The dramatic increase in Pd is expected because missed detections usually occur due to
deep fading and/or noise uncertainty, and false alarms mainly due to noise uncertainty.
With the collaboration of multiple SUs, the chance of deep fading at all SUs (all SUs miss
the signal) is reduced dramatically. The dramatic increase in the probability of correct
detection is expected because with the collaboration of multiple SUs, the chance of deep
fading at all SUs reduces drastically. For different values of noise power, the percentage
of correct detections is shown in Fig. 4.1 with σ2 varying from 20dB to 0dB for one, five
and ten SUs.
0 5 10 15 200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
σ2 (dB)
prob
abili
ty o
f cor
rect
det
ectio
n
1 user5 users10 users
Figure 4.1: The percentage of correct detections as a function of σ2 using one, five and
ten SUs, respectively. K = 3.
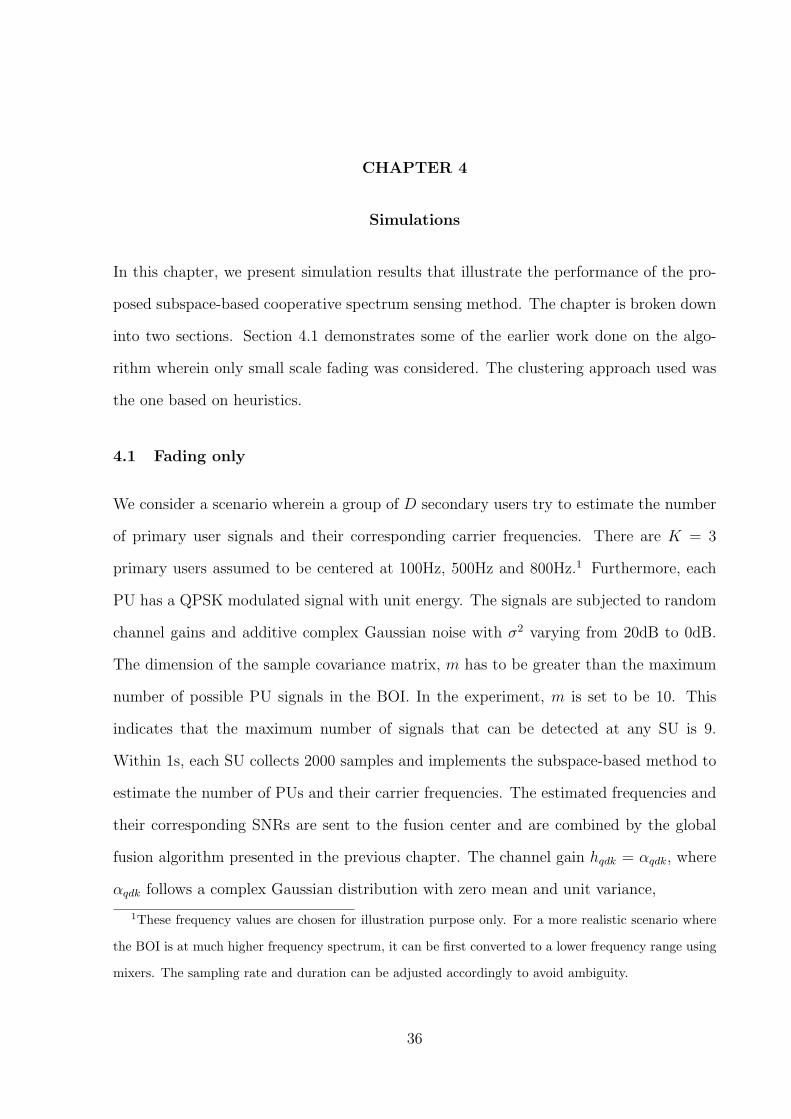
Next we compare the MSE performance of the proposed fusion method versus a simple
averaging scheme. Fig. 4.2 shows the performance of MSE for the fusion techniques with
σ2 ranging from 20dB to 0dB. The weights for the proposed estimator is obtained via
asymptotical results.
37
−20 −15 −10 −5 010
−6
10−5
10−4
10−3
10−2
10−1
100
1/σ2(dB)
MS
E(ω
1)
1 SUWeighted sum, 5 SUsWeighted sum, 10 SUsAverage, 5 SUsAverage, 10 SUs
Weighted Sum
Average
(a) MSE of estimation of ω1.
−20 −15 −10 −5 010
−6
10−5
10−4
10−3
10−2
10−1
100
1/σ2(dB)
MS
E(ω
2)
1 SUWeighted sum, 5 SUsWeighted sum, 10 SUsAverage, 5 SUsAverage, 10 SUs
Weighted Sum
Average
(b) MSE of estimation of ω2.
−20 −15 −10 −5 010
−6
10−5
10−4
10−3
10−2
10−1
100
1/σ2(dB)
MS
E(ω
3)
1 SUWeighted sum, 5 SUsWeighted sum, 10 SUsAverage, 5 SUsAverage, 10 SUs
Weighted Sum
Average
(c) MSE of estimation of ω3.
Figure 4.2: MSE performance as a function of 1/σ2 of all three PU signals using one,
five and ten SUs, respectively.MSE performance of all three fusion techniques. Number
of SUs collaborating is fixed at 10.
38

The extension of the results to the multiple antenna case provides different kind of
scenarios, with users having different number of antennas collaborating in a network trying
to find K and the corresponding ωk’s. The following set of figures show the performance
for many type of configurations (Fig. 4.3 and Fig. 4.4). From the figures the interesting
behavior to note is that when the total number of antennas are the same, the performance
tend to follow very close to each other. This is due to the absence of the shadowing effects.
The next section will reevaluate the performance of our systems under the dual effects of
shadowing and fading.
−20 −15 −10 −5 00
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
SNR in dB
p(µ)
1 SU 1 antenna1 SU 2 antennas5 SU 1 antenna5 SUs 2 antennas10 SUs 1 antenna10 SUs 2 antennas
Figure 4.3: The percentage of correct detections as a function of 1/σ2 for various config-
urations. K = 3.
4.2 Shadowing plus fading
We now consider three configurations: one secondary user equipped with ten antennas;
five secondary users each with two antennas; and ten secondary users each with one
antenna. Note that in all these configurations, the total number of antennas are fixed to
39

0 5 10 15 2010
−8
10−7
10−6
10−5
10−4
10−3
10−2
MS
E
σ2 (dB)
5 users 1 antenna5 users 2 antennas10 users 1 antenna10 users 2 antennas
(a) MSE of estimation of ω1.
0 5 10 15 2010
−7
10−6
10−5
10−4
10−3
10−2
MS
E
σ2 (dB)
1 user 10 antennas2 users 5 antennas5 users 2 antennas10 users 1 antennas
(b) MSE of estimation of ω2.
0 5 10 15 2010
−8
10−7
10−6
10−5
10−4
10−3
10−2
MS
E
σ2 (dB)
1 user 10 antennas2 users 5 antennas5 users 2 antennas10 users 1 antennas
(c) MSE of estimation of ω3.
Figure 4.4: MSE performance for different configurations.
40

be ten, implying that the same amount of data is collected for spectrum sensing. The first
configuration is a degenerated case where the fusion center is not required and one normal
eigendecomposition of the sample covariance matrix is sufficient for PU signal detection
and their carrier frequency estimation. Assume that, there are three PUs with their carrier
frequencies centered at 200Hz, 500Hz and 600Hz, respectively. 2 Both shadowing and
Rayleigh fading factors are considered in sensing, i.e., the channel gain hqdk = αqdkβqk,
where αqdk follows a complex Gaussian distribution with zero mean and unit variance,
and βqk is a log-normal random variable with the standard deviation of ρ dB.
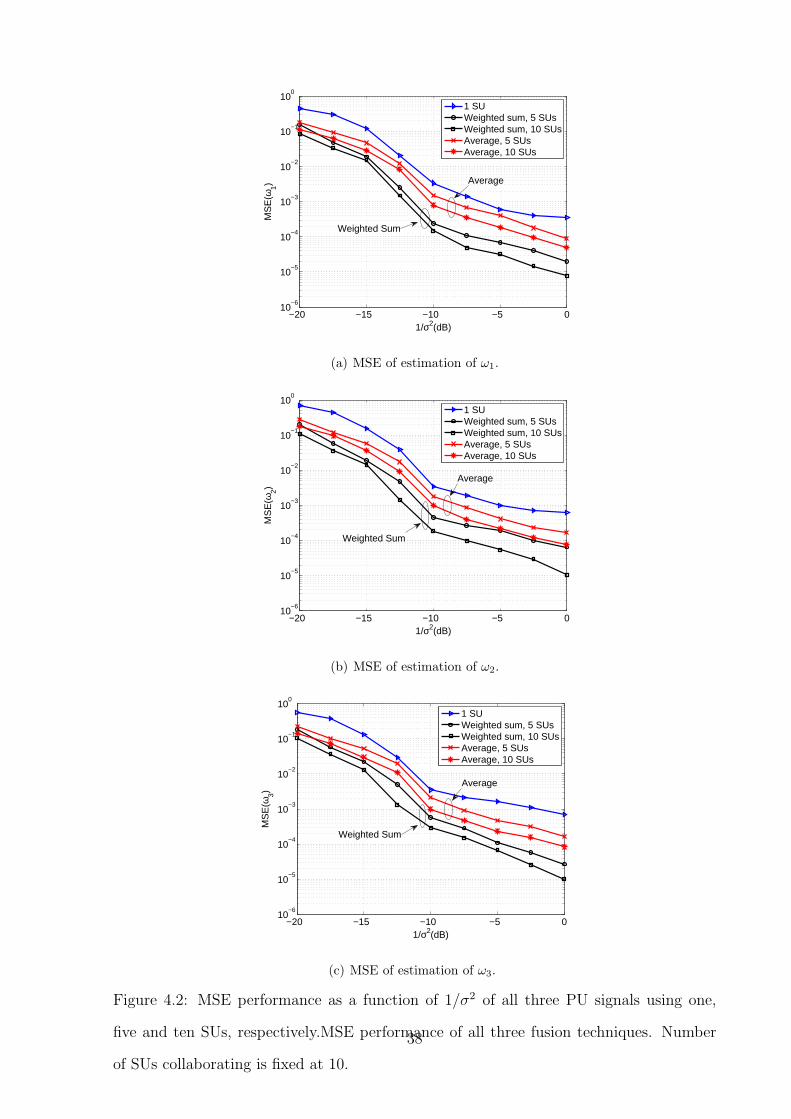
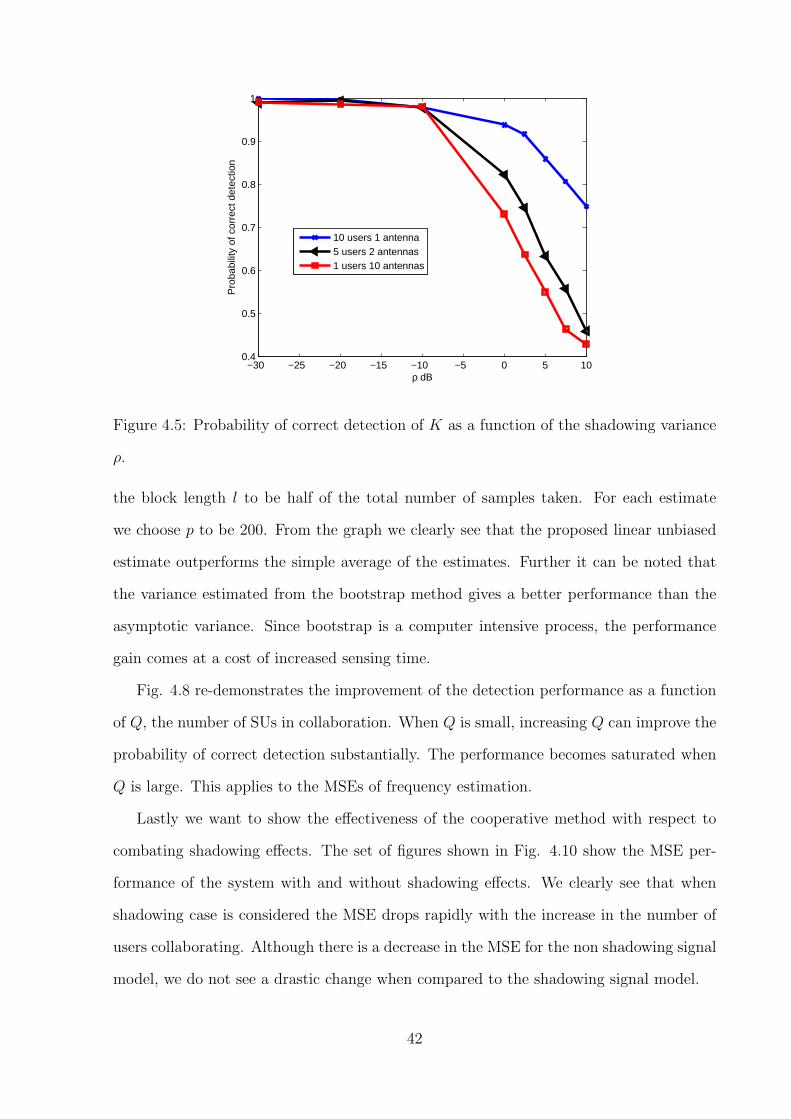
The detection performance of the proposed method is shown in Table 1. Both σ2 and
ρ are fixed at 10 dB. From the table we can clearly see that configuration 3 outperforms
all the others. This means that the more number of SUs rather than antennas will
improve the sensing performance. Fig 2. further proves this fact by showing the effect of
shadowing. While σ2 is fixed to be 10dB, ρ is varied from -30dB to 10dB. From the figure
we see that with the increase in ρ, the configuration with lesser number of SUs will have
a rapid degradation of its detection performance.
Table 4.1: Detection performance of the proposed method for all the three configurations.
σ2 = 10dB, K=3, ρ = 10dB.
Three misses Two misses One miss Correct detection One false alarm
1 user with 10 antennas 0.3851 0.0764 0.0153 0.4261 0.0095
5 users, 2 antennas each 0.1724 0.1415 0.2264 0.4594 0.0029
10 users, 1 antenna each 0.0198 0.0594 0.1754 0.7525 0.0003
We now compare the MSE performance of the proposed fusion method versus a simple
averaging scheme. We assume that there is a shadowing variance of 10dB and consider
configuration 3. Fig 4.6. shows the performance of MSE for the fusion techniques with
noise power ranging from 20dB to 0dB. For the bootstrap variance case we have taken
2This is another illustrative example. Note that the carrier frequencies are placed closer than the first
set. This is to demonstrate the efficiency of the MDL based k-means clustering algorithm.
41
−30 −25 −20 −15 −10 −5 0 5 100.4
0.5
0.6
0.7
0.8
0.9
1
ρ dB
Pro
babi
lity
of c
orre
ct d
etec
tion
10 users 1 antenna5 users 2 antennas1 users 10 antennas
Figure 4.5: Probability of correct detection of K as a function of the shadowing variance
ρ.
the block length l to be half of the total number of samples taken. For each estimate
we choose p to be 200. From the graph we clearly see that the proposed linear unbiased
estimate outperforms the simple average of the estimates. Further it can be noted that
the variance estimated from the bootstrap method gives a better performance than the
asymptotic variance. Since bootstrap is a computer intensive process, the performance
gain comes at a cost of increased sensing time.
Fig. 4.8 re-demonstrates the improvement of the detection performance as a function
of Q, the number of SUs in collaboration. When Q is small, increasing Q can improve the
probability of correct detection substantially. The performance becomes saturated when
Q is large. This applies to the MSEs of frequency estimation.
Lastly we want to show the effectiveness of the cooperative method with respect to
combating shadowing effects. The set of figures shown in Fig. 4.10 show the MSE per-
formance of the system with and without shadowing effects. We clearly see that when
shadowing case is considered the MSE drops rapidly with the increase in the number of
users collaborating. Although there is a decrease in the MSE for the non shadowing signal
model, we do not see a drastic change when compared to the shadowing signal model.
42

0 5 10 15 2010
−6
10−5
10−4
10−3
10−2
σ2(dB)
MS
E
AverageWeighted average, asymptotic varianceWeighted average, bootstrap variance
(a) MSE of estimation of ω1.
0 5 10 15 2010
−5
10−4
10−3
10−2
σ2(dB)
MS
E
AverageWeighted average, asymptotic varianceWeighted average, bootstrap variance
(b) MSE of estimation of ω2.
0 5 10 15 2010
−5
10−4
10−3
10−2
σ2(dB)
MS
E
AverageWeighted average, asymptotic varianceWeighted average, bootstrap variance
(c) MSE of estimation of ω3.
Figure 4.6: MSE performance of all three fusion techniques.
43

−30 −25 −20 −15 −10 −5 0 5 1010
−5
10−4
10−3
10−2
MS
E1
shadowing variance (dB)
10 users 1 antenna5 users 2 antennas1 user 10 antennas
(a) MSE of estimation of ω1.
−30 −25 −20 −15 −10 −5 0 5 1010
−4
10−3
10−2
MS
E2
shadowing variance (dB)
10 users 1 antenna5 users 2 antennas1 user 10 antennas
(b) MSE of estimation of ω2.
−30 −25 −20 −15 −10 −5 0 5 1010
−4
10−3
10−2
MS
E3
shadowing variance (dB)
10 users 1 antenna5 users 2 antennas1 user 10 antennas
(c) MSE of estimation of ω3.
Figure 4.7: MSE performance as a function of shadowing variance ρ for all three PU
signals.
44

2 4 6 8 10 12 14 16 18 200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Number of SUs
Pro
babi
lity
of c
orre
ct d
etec
tion
σ2=10dB
σ2=20dB
σ2=30dB
Figure 4.8: The probability of correct detection as a function of the number of SUs.
ρ =10dB.
2 4 6 8 10 12 14 16 18 2010
−5
10−4
10−3
10−2
Number of SUs
MS
E
σ2=10dB
σ2=20dB
σ2=30dB
Figure 4.9: MSE of estimation of ω1 as a function of the number of SUs. ρ =10dB.
45

2 4 6 8 10 12 14 16 18 2010
−6
10−5
10−4
10−3
MS
E
Number of SUs
ρ=10dBNo shadowing
(a) MSE of estimation of ω1.
2 4 6 8 10 12 14 16 18 2010
−5
10−4
10−3
10−2
MS
E
Number of SUs
ρ=10dBNo shadowing
(b) MSE of estimation of ω2.
2 4 6 8 10 12 14 16 18 2010
−5
10−4
10−3
10−2
MS
E
Number of SUs
ρ=10dBNo shadowing
(c) MSE of estimation of ω3.
Figure 4.10: MSE of estimation as a function of the number of SUs. σ2 = 10dB.
46
CHAPTER 5
CONCLUSIONS
In this thesis we have proposed a subspace-based cooperative spectrum sensing technique,
where several SUs collaboratively determine the number of PUs in a wide BOI and their
carrier frequencies. At each SU, a preliminary estimate based on its own sample covariance
matrix is obtained using the subspace method. These estimates are then sent to a fusion
center. The problem of grouping the corresponding estimates from different secondary
users is addressed by using the MDL-based k-means algorithm. The local estimates
within the same groups are combined using an unbiased linear minimum mean square
estimator which can be reduced to a weighted sum of local estimates and the weights
are proportional to the inverse of the variances of these estimates. We further improve
the performance by estimating the variances using the bootstrap method on the collected
samples. The performance of the proposed algorithm is investigated under different system
configurations. The accuracy of detecting PUs and estimating their carrier frequencies in
the presence of shadowing can be significantly improve through the collaboration among
secondary users.
Since the communication between SUs and the fusion center is assumed to be ideal,
there is scope for future work by considering noisy and faded communication channels.
The issues to be worked on could be to see the performance degradation when non ideal
channels are considered and ways to tackle them. Another issue that needs to be con-
sidered is the bandwidth constraint on the control channel. By quantizing the frequency
estimates and weights we would put a bound on the accuracy of the values being commu-
nicated which will result in the reduction of the estimation performance. There is thus a
need to also study the tardeoff issues between bandwidth requirements and the estimation
performance.
47

APPENDIX A
Derivation of the elements of the Q matrix
The eigenvalue λi of the noise space, i = 1, . . . , r is essentially the energy of the noise
projected to the direction represented by the eigenvector ui of the noise space. Since Dq
antennas are used at each SU and it is equivalent to equal gain combining when calculating
the sample covariance matrix R, eigenvalue λi can be written as follows
λi =1
N −m+ 1
N−m+1∑
n=1
Dq∑
d=1
∥∥uHi wqd(n)
∥∥2
The mean of λi is given by
E(λi) = E
(1
N −m+ 1
N−m+1∑
n=1
Dq∑
d=1
∥∥uHi wqd(n)
∥∥2)
(o)=
Dq
N −m+ 1
N−m+1∑
n=1
E
(uHi wqd(n)w
Hqd(n)uj
)(A.1)
= Dqσ2
Equality at (o) is from the fact that the noise samples are independent of each other and
across the antennas.
The ijth elements in Ωr is Cov(λi, λj), which can be derived as follows
Cov(λi, λj) = E[(λi −Dqσ2)(λj −Dqσ
2)]
= E
[(1
N −m+ 1
N−m+1∑
n=1
Dq∑
d=1
∥∥uHi wqd(n)
∥∥2 −Dqσ2
)(A.2)
(1
N −m+ 1
N−m+1∑
s=1
Dq∑
b=1
∥∥uHj wqb(s)
∥∥2 −Dqσ2
)]
To simplify the notation, define vi(p)∆= uH
i wqd(n), p = 1, · · · , Dq(N − m + 1) and p =
48

(d− 1)(N −m+ 1) + n. Then, (A.2) becomes
Cov(λi, λj) = E
1
N −m+ 1
Dq(N−m+1)∑
p=1
‖vi(p)‖2 −Dqσ
2
1
N −m+ 1
Dq(N−m+1)∑
t=1
‖vj(t)‖2 −Dqσ
2
=1
(N −m+ 1)2
Dq(N−m+1)∑
p=1
Dq(N−m+1)∑
t=1
E
(‖vi(p)‖
2 ‖vj(t)‖2
)−
Dqσ2
N −m+ 1
Dq(N−m+1)∑
p=1
(E(‖vi(p)‖
2)+ E(‖vi(p)‖
2))+D2
qσ4
=1
(N −m+ 1)2
Dq(N−m+1)∑
p=1
Dq(N−m+1)∑
t=1
E(‖vi(p)‖
2 ‖vj(t)‖2)−D2
qσ4(A.3)
Consider E(‖vi(p)‖
2 ‖vj(t)‖2) in (A.3). It can be regarded as the expectation of the
product of four Gaussian random variables and each of them has zero mean. Then,
E
(‖vi(p)‖
2 ‖vj(t)‖2
)= E
(vi(p)v
∗i (p)vj(t)v
∗j (t)
)
= E
(vi(p)v
∗i (p)
)E
(vj(t)v
∗j (t)
)+ E
(vi(p)vj(t)
)E
(v∗i (p)v
∗j (t)
)+
E
(vi(p)v
∗j (t)
)E
(v∗i (p)vj(t)
)(A.4)
Plug (A.4) into (A.3) and we have three terms in the double summation.
The first term is
1
(N −m+ 1)2
Dq(N−m+1)∑
p=1
Dq(N−m+1)∑
t=1
E
(vi(p)v
∗i (p)
)E
(vj(t)v
∗j (t)
)= D2
qσ4
The second term is
1
(N −m+ 1)2
Dq(N−m+1)∑
p=1
Dq(N−m+1)∑
t=1
E
(vi(p)vj(t)
)E
(v∗i (p)v
∗j (t)
)
(a)=
1
(N −m+ 1)2
Dq(N−m+1)∑
p=1
Dq(N−m+1)∑
t=1
E
(uHi wqd(n)u
Hj wqb(s)
)E
(wH
qd(n)uiwHqb(s)uj
)
=1
(N −m+ 1)2
Dq(N−m+1)∑
p=1
Dq(N−m+1)∑
t=1
E
(uHi wqd(n)w
Tqb(s)u
∗j
)E
(uTi w
∗qd(n)w
Hqb(s)uj
)
(b)=0
49

Note that in (a) each index p corresponds to a unique pair of (d, n) and each index t
corresponds to a unique pair of (b, s). Equality at (b) is due to the independence of the
complex noise sequence and E[w2qd(n)] = 0.
The third term is
1
(N −m+ 1)2
(N−m+1)∑
p=1
(N−m+1)∑
t=1
E
(vi(p)v
∗j (t)
)E
(v∗i (p)vj(t)
)
=1
(N −m+ 1)2
Dq(N−m+1)∑
p=1
Dq(N−m+1)∑
t=1
E
(uHi wqd(n)w
Hqb(s)uj
)E
(uHj wqb(s)w
Hqd(s)ui
)
(A.5)
Since the expectations under the summation give nonzero values only when there is some
overlap between wqd(n) and wqb(s), i.e., they have common elements, (A.5) becomes
1
(N −m+ 1)2
Dq∑
d=1
N−m+1∑
n=1
n+m−1∑
s=n−m+1
E
(uHi wqd(n)w
Hqb(s)uj
)E
(uHj wqs(n)w
Hqb(s)ui
)
=Dqσ
4
N −m+ 1
(‖αij(0)‖
2 +m−1∑
p=1
(‖αij(p)‖
2 + ‖αji(p)‖2
))
where αij(p) = uHi J
puj. J is the m dimensional upper shift matrix with the (n,m)th
element Jn,m = δn+1,m with δij as the Kronecker delta symbol.
Combining all the results, the ijth element of Ωr becomes
Cov(λi, λj) = D2qσ
4 +D2
qσ4
N −m+ 1
‖αij(0)‖
2 +m−1∑
p=1
(‖αij(p)‖
2 + ‖αji(p)‖2
)−D2
qσ4
=D2
qσ4
N −m+ 1
‖αij(0)‖
2 +m−1∑
p=1
(‖αij(p)‖
2 + ‖αji(p)‖2
)(A.6)
Using (A.6) we can construct the covariance matrix Ωr. For implementation the noise
variance can be estimated the r-smallest eigenvalues of R for selected value of r
Dqσ2 =
1
r
r−1∑
i=0
λm−i (A.7)
ui and uj, i, j = 1, · · · , r can be approximated by the corresponding r eigenvectors of R.
The normalized sum square of the last r eigenvalues can be constructed for the Chi-square
test. The complete test procedure can be summarized as follows:
Given the data Zq(1), · · · ,Zq(N) , estimate the order-m autocorrelation matrix R
50

using (??); perform the eigendecomposition of this matrix and order its eigenvalues λi
by decreasing values and the eigenvectors accordingly. Then for r = m,m− 1,m− 2, · · ·
• estimate the noise variance using (A.7)
• build an estimate of (λr − µr):
[λm−r+1 −Dqσ
2, λm−r+2 −Dqσ2, · · · , λm −Dqσ
2]
• estimate its covariance matrix Ωr, using (A.6).
• combining all the relations compute γr:
γr =N −m+ 1
D2q σ
4(λr − µr)
HΩr(λr − µr)
and compare it to tr; if γr > tr then go to next r; if γr ≤ tr then stop and choose
m− K = r. The threshold tr , read from a chi-square table, is chosen to achieve a
given probability of underestimating m− K.
51

APPENDIX B
Analysis of ESPRIT
Consider the following prepositions:
Proposition 1 : APAHG1 = G1Λ1, with Λ1 = Λ1−σ2I where Λ1 = diag[λ1, λ2, · · · , λK ].
Proof : Multiplying (3.3) by G1 on both sides we get
RG1 = G1Λ1 = APAHG1 +G1σ2I
APAHG1 = G1(Λ1 − σ2I) = G1Λ1
Proposition 2 : G1 = AC where C = PAHG1Λ−1
1 and C−1 = GH1 A.
Proof : This can be obtained by using proposition 1.
Let
A1 = [Im−1 0]A
A2 = [0 Im−1]A (B.1)
We can see that A2 = A1D where D = diag[ejω1 , ejω2 , · · · , ejωK ]. From proposition 2 we
see that
F2 = A2C => F2 = A1DC = F1C−1DC = F1ψ
ψ = C−1DC and ψ = (FH1 F1)
−1FH1 F2
The structure of ψ clearly suggests that its eigenvalues will be the set to ωiKi=1.
52

APPENDIX C
Tracy-Widom distribution
The Tracy-Widom distribution can be expressed via the solution to the Painleve II dif-
ferential equation. Fβ can be explicitly given by
F2(s) = exp
(−
∫ ∞
s
(x− s)q2(s)dx
),
F1(s) = exp
(−1
2
∫ ∞
s
q(x)dx
)[F2(s)]
1/2
Here q(s) is the unique solution to the Painleve II differential equation
q = sq + 2q3 + α with α = 0,
satisfying the boundary condition
q(s) ∼ Ai(s), s → ∞,
where Ai(s) denotes the Airy function. Lot of programming has been done in Matlab
to help come up with a solution to the Painleve II differential equation and evaluate the
Tracy- Widom distributions. This allowed the tabulation of the Tracy Widom distribu-
tions, particularly for β = 1, 2, 4. The detailed tabulations can be found in [75]. This can
be used for statistical look-up use. The Tracy Widom density function is as shown in Fig.
53

Figure C.1: Tracy-Widom density plots, corresponding to the values of β = 1, 2
54

APPENDIX D
More on k-means clustering technique using the MDL principle
In section 3.3.1 an unsupervised clustering algorithm was presented which helps k-means
algorithm learn the number of clusters in an iterative approach. This appendix aims at
providing more information on the basis of k-means algorithm and how the MDL principle
is used to arrive at the optimum number of clusters. The algorithm provided in section
3.3.1 just provides the basic framework without specifying the details about the coding
procedures for the indices and the errors. We conclude this appendix by providing the
encodings for the index and error terms.
D.1 k-means
k-means is a type of clustering algorithm which breaks an n length data set into k subsets,
where the members of each of the k subset is closest to a mean ck. Thus if we have a d
dimensional data set X = x1, x2, · · · , xn, the k-means algorithms breaks the set S into
k (k < n) subsets S = S1,S2, · · · ,Sksuch that
minS
∑
i=1
k∑
xj∈Si
‖xj − ci‖2
where ci is called the mean of Si. The method has a requirement of having a decision
on the number of clusters in advance, and if the result is not correct, we tend to get
very different clustering results. This property of the k means algorithms is illustrated
in [68] through simulations. Fig. B.1 illustrates what happens if we take a simple cluster
structure (five clusters (30 points) and two isolated points) and initialize k-means with
the wrong number of centers. The figure shows how dependent the results are on the
initializations.
Since many of the applications do not have the knowledge of the number of clusters
55

beforehand, the direct application of the k means algorithm becomes very complicated.
These classes of problems are called unsupervised clustering techniques. Since the k-
means is a popular choice for clustering, there are many works in the literature which
propose algorithms which help learn the optimal value of k. In the next section we study
a principle used generally in algorithm complexity and see its application as a method to
learn the optimal value of k.
Figure D.1: Illustration of the performance of the k-means algorithm, when initialized
with eight centers (a) and four centers (b).
56
D.2 MDL principle
The minimum description length principle, introduced by Jorma Rissanen in 1978, is
obtaining the best hypothesis on a set of data which leads to the maximum compression
of the data set. Any data set can be represented by symbols. If the binary representation
of the data is considered, the aim of the MDL principle is to find any regularities in the
data set which can be used to reduce the number of bits required to represent them.
Therefore, if we know that the data set follows the property of being in cluster sets, then
the MDL principle becomes analogous to differential encoding. To compress the data we
can now assign reference data points and the data points are encoded by the reference
vector index and the error. This would obviously require lesser bits than encoding each
data point separately. The MDL principle avoids overfitting of data since it not only
considers the complexity of the data set given the hypothesis but also the hypothesis
itself. The algorithm in section 3.3.1 thus treats the cluster space as a network and starts
off with an overly complex network (having a lot of cluster centers). It then uses MDL
as a pruning technique and to identify estimates from false alarms termed as outliers,
gradually reducing the number of redundant cluster centers until it arrives at a point
which balances the error versus the number of cluster centers.
D.3 Instantiations of the MDL-Algorithm
The iterative algorithm can be represented by the flow graph shown in Fig. B.2. The
clustering problem is approached as a minimization of the length of the description of the
data set D through vector quantization. If the outliers are already identified as the set
B, then I = D − B is the data set which needs to described by the cluster centers D.
The length of encoding D by using the set C is given by
L(D(C)) = L(D) + L(I(C)) + L(ǫ(IC)) + L(B) (D.1)
We see that the length of encoding the data set is the sum of encoding the cluster center
set D, the length of encoding the frequency estimates using C, the sum of the residual
57

Figure D.2: Iterative algorithm.
58

errors for quantizing each frequency estimate using C and encoding the outliers. Since
the cluster centers are represented by M bits, (D.1) can be rewritten as
L(D(C)) = KM + L(I(C)) +K∑
i=1
∑
x∈Di
L(x− ωi) + |B|M (D.2)
Where Di is the set of frequency estimates belonging to the ith cluster and x is a
frequency estimate belonging to the set D. If we assume a simple type of encoding with
a fixed length code for each cluster center index, the amount of bits needed for each data
point is log2(K); L(I(D)) = |I|log2(K). It is assumed that the encoding length of the
error term is proportional to its magnitude and thus we have
L(x− ωi) = L(ǫ(x)) = log2(|x− ωi|
η)
η is the required accuracy of quantization. (D.2) can now be modified as
L(D(C)) = KM + |I|(log2(K) +K∑
i=1
∑
x∈Di
log2(|ǫ(x)|
η) + |B|M (D.3)
The iterative algorithm can now be approached using the results;
1. Initialization: The data set D is first initialized with a large number of cluster
centers. In our case we can start with m cluster centers.
2. Adaptation: The k-means clustering algorithm is adopted to cluster the data set.
3. Selection: The superfluous cluster centers are then removed. They are identified
by observing the change in L(D(C)) when we remove a cluster center, i.e.
∆Lωj= L(D(C− ωj))− L(D(C))
The goal is to minimize the description length, therefore if ∆Lωj< 0 we can term
that cluster center as superfluous. We can estimate ∆Lωjfrom (D.2)
∆Lωj= −M + L(I(C− ωj))− L(I(C)) +
∑
x∈Dj
(L(ǫ(−j)(x))− L(x− ωj))
59

where ǫ(−j)(x) is the error caused by the vector x when ωj is removed from C, i.e.,
ǫ(−j)(x) = (x−ωk), k = arg mini=1,··· ,j−1,j+1,··· ,K ‖x− ωi‖. The above term can now
be expressed using (D.3) as
∆Lωj= M + |I|(log2(K − 1)− log2(K)) +
∑
x∈Dj
log2
(|ǫ(−j)(x)|
|ǫ(x)|
)(D.4)
4. Outliers: According to the MDL principle, those estimates are termed to be outliers
which can be encoded with less bits directly rather than a reference vector quantizing
them. This can be easily calculated from (D.1) by checking the change in the coding
length when a data point y ∈ Di is termed as an outlier.
K < L((I− y)(C)) + L(y − ωi) + F|Di|=1M (D.5)
where
F|Di|=1 =
1 : |Di| = 1
0 : otherwise
is the indicator function, indicating if y is the only data point in cluster i.
5. Convergence: If there were no outliers detected nor any cluster centers were re-
moved and the changes in the adaptation step were too small then we decide to
stop. Otherwise we goto step 2.
60

BIBLIOGRAPHY
[1] I. F. Akyildiz, W. Lee, M. C. Vuran, S. Mohanty, “Next generation/dynamic spec-
trum access/cognitive radio wireless networks: A survey,” Computer Networks Jour-
nal, vol. 50, pp. 2127-2159, May 2006.
[2] M. A. McHenry, “NSF Spectrum Occupancy Measurements Projects Summary,”
Shared Spectrum Company Report, Aug. 2005.
[3] S. Haykin,“Cognitive radio: Brain Empowered Wireless Communications,” IEEE
Journal Selet. Area on Communications, vol. 23, no. 2, pp. 201-220, Feb. 2005.
[4] I. Mitola, J. and J. Maguire, G. Q.,“Cognitive radio: making software radios more
personal,” IEEE Personal Commun. Mag., vol. 6, no. 4, pp. 13-18, Aug. 1999.
[5] J. G. Proakis,” Digital Communications, 4th ed. McGraw-Hill, 2001.
[6] R. Tandra and A. Sahai,“Fundamental limits on detection in low SNR under noise
uncertainty,” in Proc. IEEE Int. Conf. Wireless Networks, Commun. and Mobile
Computing, vol. 1, Pacific Grove, California, USA, Nov. 2004, pp. 772-776.
[7] A. V. Oppenheim, R. W. Schafer and J. R. Buck,” Discrete-Tme Signal Processing,
Prentice Hall, 1999.
[8] H. Urkowitz, “Energy detection of unknown deterministic signals,” Proc. IEEE, vol.
55, pp. 523-531, Apr. 1967.
[9] A. Sahai, N. Hoven, R. Tandra, “Some Fundamental Limits on Cognitive Radio,”
Proc. of Allerton Conference, Monticello, Oct 2004.
[10] U. Gardner, WA, “Exploitation of spectral redundancy in cyclostationary signals,”
IEEE Signal Processing Mag., vol. 8, no. 2, pp. 14-36, 1991.
61

[11] K. Kim, I. A. Akbar, K. K. Bae, J. Urn, C. M. Spooner and J. H. Reed, “Cyclosta-
tionary Approaches to Signal Detection and Classification in Cognitive Radio,” IEEE
International Symposium on New Frontiers in Dynamic Spectrum Access Networks,
2007.
[12] J. Lunden, V. Koivunen, A. Huttunen and H. V. Poor, “Spectrum sensing in cog-
nitive radios based on multiple cyclic frequencies,” 2nd International Conference on
Cognitive Radio Oriented Wireless Networks and Communications, Orlando, FL, Jul.
2007.
[13] B. Zayen, A. Hayar and D. Nussbaum, “Blind spectrum sensing for cognitive radio
based on model selection,” IEEE CrownCom, May 2008.
[14] Y. Zeng, Y.C. Liang, “Maximum-Minimum Eigenvalue Detection for Cognitive Ra-
dio,” in 18th Annual IEEE International Symposium on Personal, Indoor and Mobile
Radio Communication (PIMRC), pp. 1-5, Sept. 2007.
[15] Y. Zeng, Y.C. Liang, “Eigenvalue based Spectrum Sensing Algorithms for Cognitive
Radio,” arXiv:0804.2960
[16] F. Penna, R. Garello, M. A. Spirito, “Cooperative Spectrum Sensing based on the
Limiting Eigenvalue Ratio Distribution inWishart Matrices,”accepted for publication
in IEEE Comm. Letters, 2009.
[17] Y. Zeng and Y. Liang, “Covariance based signal detections for cognitive radio,” in
Proc. IEEE DySpan07, pp. 202-207, Apr. 2007.
[18] Sung Sue Hwang, Dong Chan Park, Suk Chan Kim, Myung Sun Song,Sun Min
Lim, “Spectrum sensing using Bussgang theorem for IEEE 802.22 WRAN,” in Proc.
Military Communications Conference, 2008. MILCOM 2008. IEEE, pp. 1-5, Nov.
2008.
[19] J.J. Bussgang, “Cross-correlation function of amplitude-distorted gaussian signals,”
Res. Lab. Elec., Mas. Inst. Technol., Cambridge MA, Tech. Rep. 216, Mar. 1952.
62

[20] H. Li, C. Li, and H. Dai, “Quickest spectrum sensing in cognitive radio,” in Proc. of
CISS’08, pp. 203- 208, Mar. 2008.
[21] Fehske, A. and Gaeddert, J. and Reed, J.H., “A new approach to signal classification
using spectral correlation and neural networks,” New Frontiers in Dynamic Spectrum
Access Networks, 2005. DySPAN 2005. 2005 First IEEE International Symposium
on, vol., no.pp. 144- 150, 8-11 Nov. 2005.
[22] Farhang-Boroujeny B. , “Filter Bank Spectrum Sensing for Cognitive Radios,” Signal
Processing, IEEE Transactions, Vol. 56, No. 5, pp.1801-1811, May 2008.
[23] Z. Quan, S. Cui, A.H. Sayed, and H.V. Poor, “Wideband spectrum sensing in cog-
nitive radio networks,” in Proc. IEEE Int. Communications Conf., Beijing, China,
May 2008, pp. 901-906.
[24] A. Taherpour, S. Gazor, and M. Nasiri-Kenari, “Wideband spectrum sensing in un-
known white Gaussian noise,” Special issue on Cognitive Spectrum Access in IET
Communications, Vol. 2, No. 6, pp.763-771, 2008.
[25] Z. Tian and G. B. Giannakis, “A wavelet approach to wideband spectrum sensing for
cognitive radios,” 1st Int. Conference on Cognitive Radio Oriented Wireless Networks
and Communications, Jun. 2006.
[26] Y. Hur, J. Park, W. Woo, K. Lim, C.-H. Lee, H. S. Kim and J. Laskar, “A wide-
band analog multi-resolution spectrum sensing technique for cognitive radio sys-
tems,” IEEE International Symposium on Circuits and Systems, May 2006.
[27] A. Ghasemi and E. S. Sousa, “Collaborative spectrum sensing for opportunistic access
in fading environments,” 1st IEEE Symp. New Frontiers in Dynamic Spectrum Access
Networks, Baltimore, USA, Nov. 2005,
[28] D. Cabric, A. Tkachenko, and R. Brodersen, “Spectrum sensing measurements of
pilot, energy, and collaborative detection,” in Proc. IEEE Military Commun. Conf.,
Washington, D.C., USA, Oct. 2006, pp. 17.
63
[29] X. Liu and S. Shankar, “Sensing-based opportunistic channel access,” Mobile Net-
works and Applications, vol. 11, no. 4, pp. 577-591, 2006.
[30] P. Pawetczak, G. J. Janssen, and R. V. Prasad, “Performance measures of dynamic
spectrum access networks,” in Proc. IEEE Global Telecomm. Conf. (Globecom), San
Francisco, California, USA, Nov./Dec. 2006.
[31] A. Ghasemi and E. S. Sousa, “Asymptotic performance of collaborative spectrum
sensing under correlated log-normal shadowing,” IEEE Commun. Lett., vol. 11, no.
1, pp. 34-36, Jan. 2007.
[32] E. Peh and Y.-C. Liang, “Optimization for cooperative sensing in cognitive radio
networks,” in Proc. IEEE Wireless Commun. and Networking Conf., Hong Kong,
Mar. 2007, pp. 27-32.
[33] E. Visotsky, S. Kuffner, and R. Peterson, “On collaborative detection of TV trans-
missions in support of dynamic spectrum sharing,” in Proc. IEEE Int. Symposium on
New Frontiers in Dynamic Spectrum Access Networks, Baltimore, Maryland, USA,
Nov. 2005, pp. 338-345.
[34] T. Weiss, J. Hillenbrand, and F. Jondral, “A diversity approach for the detection
of idle spectral resources in spectrum pooling systems,” in Proc. of the 48th Int.
Scientific Colloquium, Ilmenau, Germany, Sept.2003, pp. 37-38.
[35] S.M. Mishra, A. Sahai and R.W. Brodersen, “Cooperative Sensing among Cognitive
Radios,” IEEE International Conference on Communications, June 2006.
[36] J. Lunden, V. Koivunen, A. Huttunen, and H. V. Poor, “Spectrum sensing in cogni-
tive radios based on multiple cyclic frequencies,” in Proc. IEEE Int. Conf. Cognitive
Radio Oriented Wireless Networks and Commun. (Crowncom), Orlando, Florida,
USA, July/Aug. 2007.
[37] Z. Chair and P. K. Varshney, “Optimal data fusion in multiple sensor detection
systems,” IEEE Trans. Aerosp. Electron. Syst., vol. 22, no. 1, pp. 98-101, Jan. 1986.
64
[38] M. Gandetto, A. F. Cattoni, and C. S. Regazzoni, “A distributed approach to mode
identification and spectrum monitoring for cognitive radios,” in Proc. SDR Forum
Technical Conference, Orange County, California, USA, Nov. 2005..
[39] M. Gandetto, A. F. Cattoni, M. Musso, and C. S. Regazzoni, “Distributed coop-
erative mode identification for cognitive radio applications,” in Proc. International
Radio Science Union (URSI), New Delhi, India, Oct. 2005.
[40] A. F. Cattoni, I. Minetti, M. Gandetto, R. Niu, P. K. Varshney, and C. S. Regazzoni,
“A spectrum sensing algorithm based on distributed cognitive models,” in Proc. SDR
Forum Technical Conference, Orlando, Florida, USA, Nov. 2006..
[41] M. Gandetto and C. Regazzoni, “Spectrum sensing: A distributed approach for
cognitive terminals,” IEEE J. Select. Areas Commun., vol. 25, no. 3, pp. 546-557,
Apr. 2007.
[42] G. Shafer, “A Mathematical Theory of Evidence. Princeton, New Jersey, USA:
Princeton Univ. Press, 1976.
[43] P. Qihang, Z. Kun, W. Jun, and L. Shaoqian, “A distributed spectrum sensing scheme
based on credibility and evidence theory in cognitive radio context,” in Proc. IEEE
Int. Symposium on Personal, Indoor and Mobile Radio Commun., Helsinki, Finland,
Sept. 2006, pp. 15.
[44] P. Paweczak, G. J. Janssen, and R. V. Prasad, “Performance measures of dynamic
spectrum access networks,” Proc. IEEE Global Telecomm. Conf. (Globecom), vol. 25,
no. 3, pp. 546-557, Apr. 2007. San Francisco, California, USA, Nov./Dec. 2006.
[45] E. Visotsky, S. Kuffner, and R. Peterson, “On collaborative detection of TV trans-
missions in support of dynamic spectrum sensing,” Proc. IEEE Symp. New Frontiers
in Dynamic Spectrum Access Networks (Baltimore, USA), pp. 338-345, Nov. 811,
2005.
65
[46] C. Sun, W. Zhang, and K. B. Letaief, “Cooperative spectrum sensing for cognitive
radios under bandwidth constraints,” in Proc. IEEE Wireless Commun. and Net-
working Conf, Hong Kong, Mar. 2007, pp. 15.
[47] M. Gandetto, A. F. Cattoni, and C. S. Regazzoni, “A distributed approach to mode
identification and spectrum monitoring for cognitive radios,” in Proc. SDR Forum
Technical Conference, Orange County, California, USA, Nov. 2005.
[48] M. Gandetto, A. F. Cattoni, M. Musso, and C. S. Regazzoni, “Distributed coop-
erative mode identification for cognitive radio applications,” in Proc. International
Radio Science Union (URSI), New Delhi, India, Oct. 2005.
[49] M. Gandetto and C. Regazzoni, “Spectrum sensing: A distributed approach for
cognitive terminals,” IEEE J. Select. Areas Commun., vol. 25, no. 3, pp. 546-557,
Apr. 2007.
[50] A. Ghasemi and E. Sousa, “Collaborative spectrum sensing for opportunistic access in
fading environments,” in Proc. IEEE Int. Symposium on New Frontiers in Dynamic
Spectrum Access Networks, Baltimore, Maryland, USA, Nov. 2005, pp. 131-136.
[51] Wei Zhang, Mallik.R.K., Ben Letaief. K., “Cooperative spectrum sensing in cognitive
radio networks,” in PProc. IEEE Int. Symposium on New Frontiers in Dynamic
Spectrum Access Networks, Baltimore, Maryland, USA, Nov. 2005, pp. 137-143.
[52] N. Ahmed, D. Hadaller, and S. Keshav, “GUESS: gossiping updates for efficient
spectrum sensing,” in Proc. International workshop on Decentralized resource sharing
in mobile computing and networking, Los Angeles, California, USA, 2006, pp. 12-17.
[53] B. Wild and K. Ramchandran, “Detecting primary receivers for cognitive radio ap-
plications,” in PProc. IEEE Int. Symposium on New Frontiers in Dynamic Spectrum
Access Networks, Proc. IEEE Int. Symposium on New Frontiers in Dynamic Spec-
trum Access Networks,
66
[54] S. Shankar, C. Cordeiro, and K. Challapali, “Spectrum agile radios: utilization and
sensing architectures,” in Proc. IEEE Int. Symposium on New Frontiers in Dynamic
Spectrum Access Networks, Baltimore, Maryland, USA, Nov. 2005, pp. 160-169.
[55] Standard for Wireless Regional Area Networks (WRAN) - Specific requirements -
Part 22: Cognitive Wireless RAN Medium Access Control (MAC) and Physical Layer
(PHY) Specifications: Policies and procedures for operation in the TV Bands, The
Institute of Electrical and Electronics Engineering, Inc. Std. IEEE 802.22.
[56] R. Rao, Q. Cheng and P. Ray, “Subspace-based Cooperative Spectrum Sensing for
Cognitive Radio,” in Proc. 42nd Annual Asilomar Conference on Signals, Systems,
and Computers, Pacific Grove, CA, Oct. 2008.
[57] A. Sahai and D. Cabric, “Spectrum sensing: fundamental limits and practical chal-
lenges,” IEEE International Symposium on New Frontiers in Dynamic Spectrum
Access Networks, Nov. 2005.
[58] Z. Quan, S. Cui, A. Sayed and H. V. Poor, “Wideband Spectrum Sensing in Cognitive
Radio Networks,” ICC, May, 2008.
[59] A. Wagstaff and N. Merricks, “A Subspace-Based Method for Spectrum Sensing,”
2007.
[60] A. Ghasemi and E. S. Sousa, “Collaborative spectrum sensing for opportunistic access
in fading environments,” 1st IEEE Symp. New Frontiers in Dynamic Spectrum Access
Networks, Baltimore, USA, Nov. 2005,
[61] S.M. Mishra, A. Sahai and R.W. Brodersen, “Cooperative Sensing among Cognitive
Radios,” IEEE International Conference on Communications, June 2006.
[62] J. Unnikrishnan and V.V. Veeravalli, “Cooperative Sensing for Primary Detection in
Cognitive Radio,” IEEE Journal of Selected Topics in Signal Processing, Vol. 2, No.
1, pp. 18-27, Feb. 2008.
67

[63] T.S. Rappaport, Wireless Communications: Principles and Practice. Prentice Hall,
2002.
[64] R. Roy and T. Kailath, “ESPRIT-estimation of signal parameters via rotational
invariance techniques,” IEEE Trans. on Acoustics, Speech, and Signal Processing,
Vol. 37, No. 7, pp. 984-995, Jul 1989.
[65] P. Stoica and T. Soderstrom, “Statistical Analysis of MUSIC and Subspace Rotation
Estimates of Sinusoidal Frequencies,” IEEE Trans. Signal Processing, vol. 39, no. 8,
pp 1836-1847, 1991.
[66] J.-J. Fuchs, “Estimating the number of sinusoids in additive white noise,” IEEE
Trans. on Signal Processing, vol. 36, no. 12, pp. 1846-1853, Dec. 1988.
[67] S. M. Kay, Fundamentals of Statistical Signal Processing, Vol. I - Estimation Theory,
Prentice Hall, 1993.
[68] Horst Bischof, Ales Leonardis and Alexander Selb, “ MDL Principle for Robust
Vector Quantization, ” Pattern Analysis and Application 2, (1999) (1), pp. 59-72.
[69] J. Rissanen, “Universal coding, information, prediction, and estimation, ” IEEE
Transactions on Information Theory, pp. 629-636, 1984.
[70] J. Rissanen, “Stochastic Complexity in Statistical Inquiry, ” Series in Computer
Science, Vol-15, 1989.
[71] Jun Shao and Dongsheng Tu. The Jackkinfe and Bootstrap, Springer Series in Statis-
tics,
[72] S. Kritchman and B. Nadler. “Determining the number of components in a factor
model from limited noisy data, ”Chem. Int. Lab. Sys.,2008.
[73] I.M. Johnstone,On the distribution of the largest eigenvalues in principal components
analysis, ”Annals of Statistics, vol. 29, pp. 295-327, 2001.
68

[74] M. Inaba, N. Katoh , H. Imai, “Applications of weighted Voronoi diagrams and ran-
domization to variance-based k-clustering,” 10th ACM Symposium on Computational
Geometry, pp. 332-339, 1994.
[75] A. Bejan, “ Tracy-Widom and Painleve II : computational aspects and realization in
S-Plus, in Proc. ”14th Conference on Applied and Industrial Mathematics, Chisinau,
Moldova, 2006.
69

VITA
Raghavendra U Rao
Candidate for the Degree of
Master of Science
Thesis: SUBSPACE-BASED COOPERATIVE SPECTRUM SENSING FOR COGNI-TIVE RADIOS
Major Field: Electrical Engineering
Biographical:
Personal Data:Born in Bangalore, Karnataka, India on December 28, 1984.
Education:Received the B.E. degree from Vishveshwaraya Technological University, Ban-galore, Karnataka, India, 2006, in TelecommunicationCompleted the requirements for the degree of Master of Science with a majorin Electrical Engineering Oklahoma State University in May, 2010.
Experience:Worked as Research Assistant at the Statistical Signal Processing Lab underDr. Qi Cheng from January 2008 to May 2010. He was the teaching assistantfor the course “Stochastic System” in Fall 2009.Before joining Oklahoma State University he worked in Infosys TechnologiesLtd., India as a software engineer. He was also a summer intern as an embeddedsoftware engineer at Gramin International, Kansas over the summer of 2008.
Publications:R. Rao, Q. Cheng and P. Ray, “Subspace-based Cooperative Spectrum Sensingfor Cognitive Radio,” in Proc. 42nd Annual Asilomar Conference on Signals,Systems, and Computers, Pacific Grove, CA, Oct. 2008.
R. Rao, Q. Cheng and P. K. Varshney “ Subspace-based Cooperative SpectrumSensing for Cognitive Radios”, submitted IEEE Transactions for Sensores, Jan2010.

Name: Raghavendra Udupi Rao Date of Degree: May, 2010
Institution: Oklahoma State University Location: Stillwater, Oklahoma
Title of Study: SUBSPACE-BASED COOPERATIVE SPECTRUM SENSING FORCOGNITIVE RADIOS
Pages in Study: 69 Candidate for the Degree of Master of Science
Major Field: Electrical Engineering
Spectrum sensing is the first and the most important part in the Cognitive radio cycle. Inthis thesis, a wide band sensing scheme based on subspace methods to detect the presenceof the primary users under the dual effects of rayleigh fading and log-normal shadowingis considered. The use multiple antennas to combat multipath fading and cooperationamongst secondary users to negate the effects of shadowing is proposed. Specifically, basedon the collected samples of the received signals over multiple antennas, each secondaryuser estimates the number of primary user signals and their carrier frequencies using thesubspace method. Before fusing all local estimates, the fusion center needs to determinewhich estimates belong to which primary users. The k-means algorithm built on theminimum description length principle is proposed for the data association problem, whichcan further eliminate false alarms. A linear unbiased estimator is proposed for data fusionand it reduces to a weighted sum of local estimates that belong to the same primary user.Experiments are conducted to demonstrate the efficiency of the proposed algorithm indetecting the correct number of primary users and estimating their carrier frequencies.
ADVISOR’S APPROVAL: