summary so far: free, undamped, linear (harmonic) oscillator free, undamped, non-linear oscillator...
TRANSCRIPT

Summary so far:• Free, undamped, linear (harmonic) oscillator• Free, undamped, non-linear oscillator• Free, damped linear oscillator
Starting today:• Driven, damped linear oscillator• Laboratory to investigate LRC circuit as example of driven, damped oscillator• Time and frequency representations• Fourier series
Reading: Main 5.1, 6.1Taylor 5.5, 5.6
THE DRIVEN, DAMPED HARMONIC OSCILLATOR
2
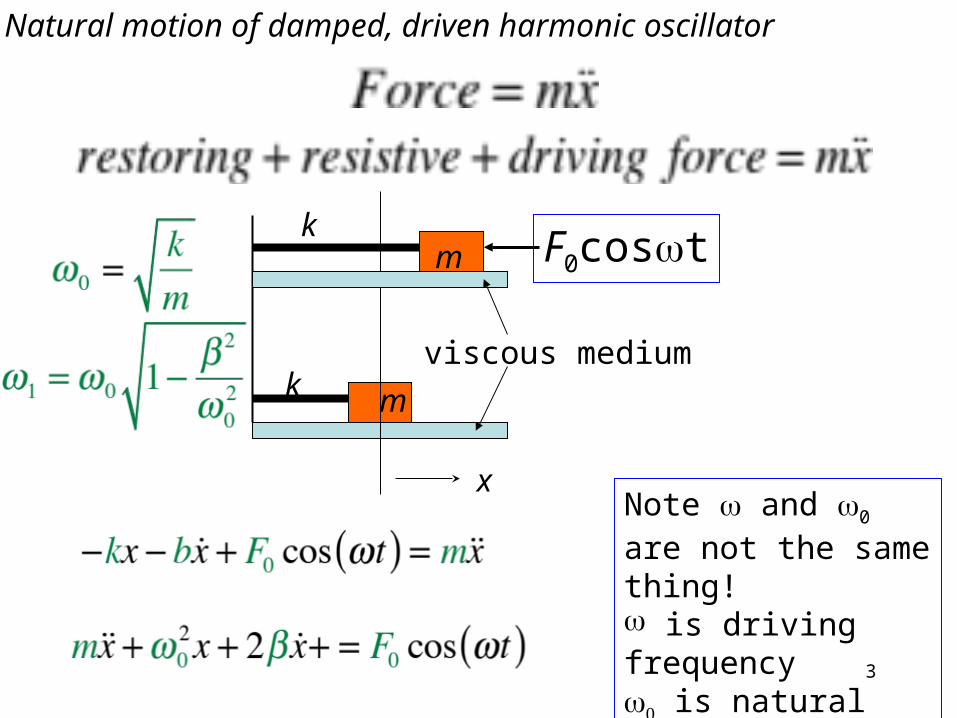
Natural motion of damped, driven harmonic oscillator
x
m
mk
kviscous medium
F0cost
Note and 0 are not the same thing! is driving frequency is natural frequency
3
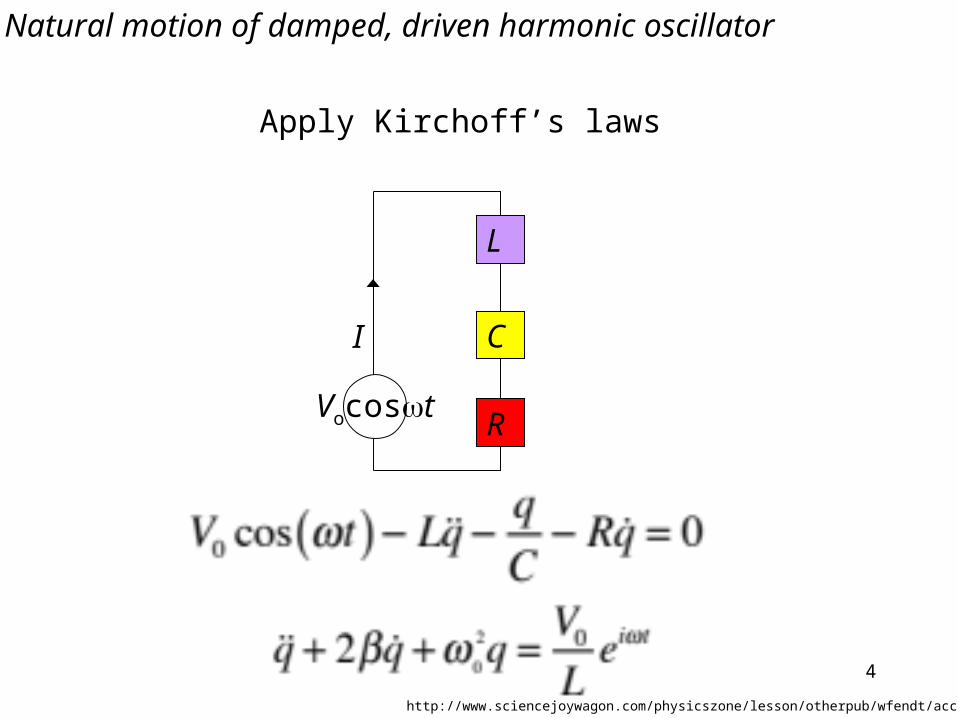
Natural motion of damped, driven harmonic oscillator
L
R
CI
Vocost
Apply Kirchoff’s laws
http://www.sciencejoywagon.com/physicszone/lesson/otherpub/wfendt/accircuit.htm
4

underdamped
large if is small compared to 0
Damping time or "1/e" time is = 1/(>> 1/if is very small)
How many T0 periods elapse in the damping time? This number (times π) is the Quality factor or Q of the system.
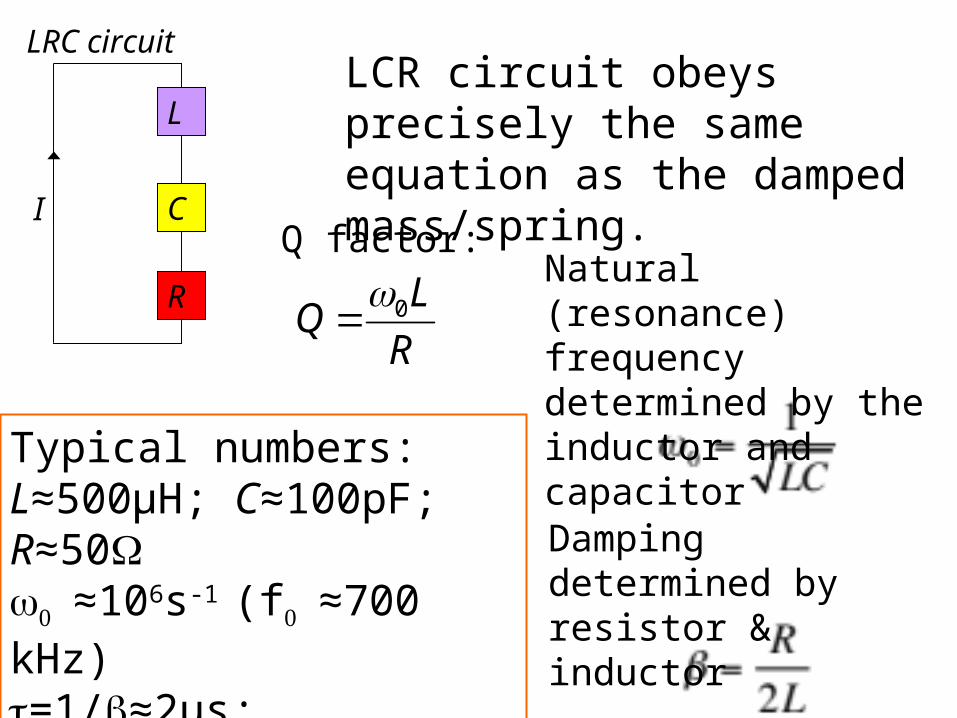
LCR circuit obeys precisely the same equation as the damped mass/spring.
LRC circuit
L
R
CI
Natural (resonance) frequency determined by the inductor and capacitor
Damping determined by resistor & inductor
Typical numbers: L≈500µH; C≈100pF; R≈50≈106s-1 (f≈700 kHz)=1/≈2µs; (your lab has different parameters)
Q factor:
0LQ
R

8
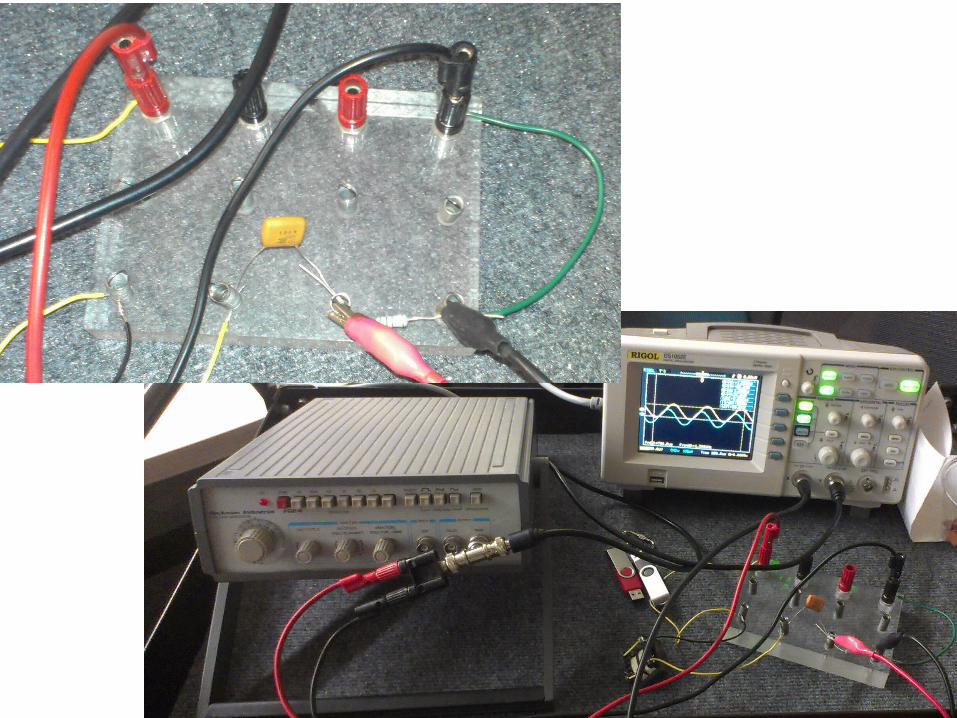
Measure the frequency!“ctrl-alt-del” for osc
Put cursor in track mode, one to track ch1, one for ch2
Menu off button “push”=enter
save to usb drive
measure Vout across R Vin to func gen
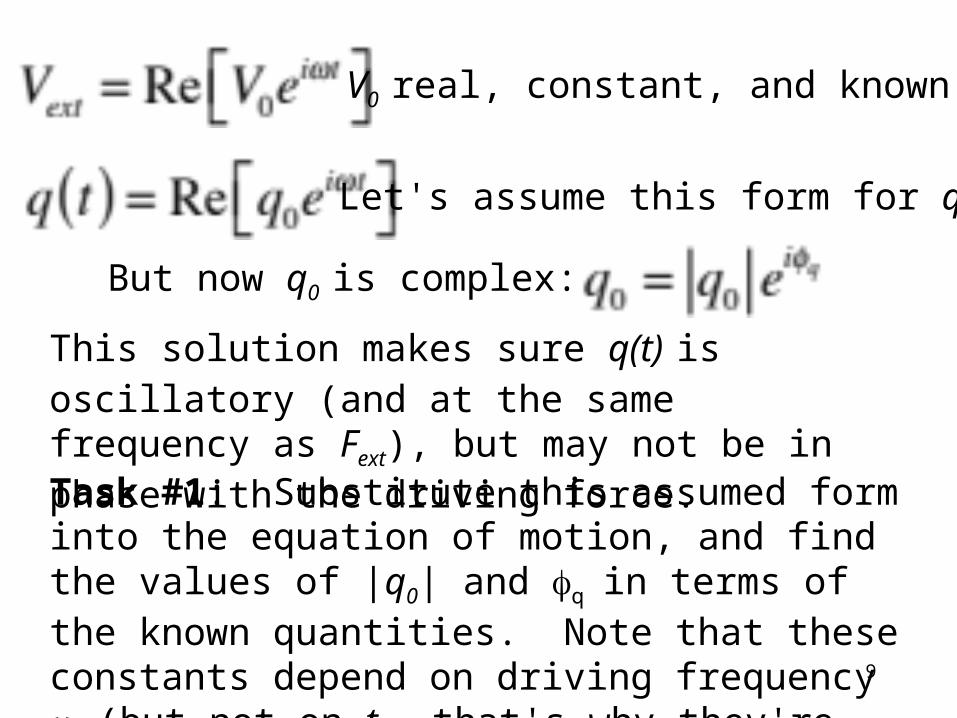
V0 real, constant, and known
But now q0 is complex:
This solution makes sure q(t) is oscillatory (and at the same frequency as Fext), but may not be in phase with the driving force.Task #1: Substitute this assumed form into the equation of motion, and find the values of |q0| and qin terms of the known quantities. Note that these constants depend on driving frequency (but not on t – that's why they're "constants"). How does the shape vary with 9
Let's assume this form for q(t)
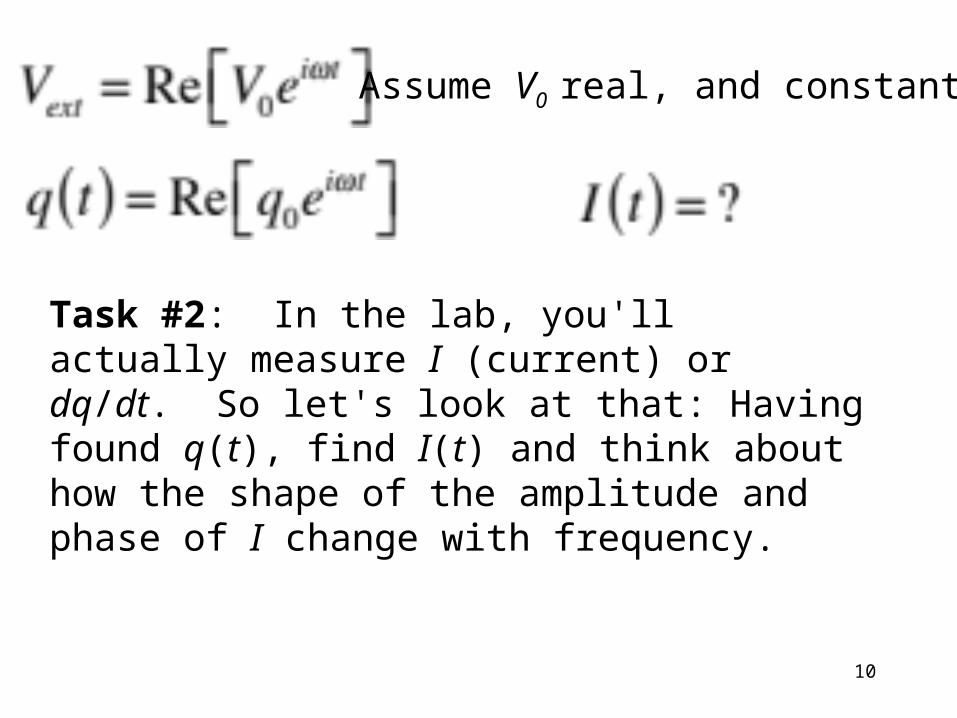
Assume V0 real, and constant
Task #2: In the lab, you'll actually measure I (current) or dq/dt. So let's look at that: Having found q(t), find I(t) and think about how the shape of the amplitude and phase of I change with frequency.
10

Assume V0 real, and constant
Task #1: Substitute this assumed form into the equation of motion, and find the values of |q0| and in terms of the known quantities. Note that these constants depend on (but not on t – that's why they're “constants”). How does the shape vary with
11

ChargeAmplitude
|q0|
ChargePhase q
Driving Frequency------>
"Resonance"
0
-π
-π/2
12

Task #2: In the lab, you’ll actually measure I (current) or dq/dt. So let's look at that: Having found q(t), find I(t) and think about how the shape of the amplitude and phase of I change with frequency.
13

CurrentAmplitude|I0|
CurrentPhase
Driving Frequency------>
“Resonance”
14
0
π/2
-π/2

ChargeAmplitude
|q0|
Driving Frequency------>
“Resonance”
15
CurrentAmplitude|I0|
0
0
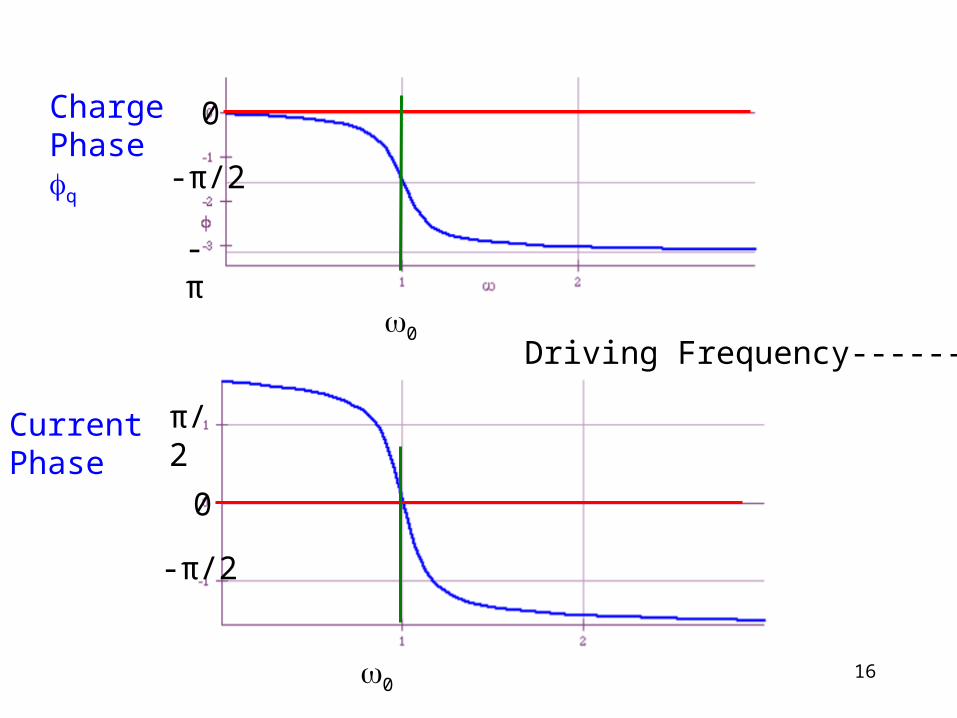
CurrentPhase
Driving Frequency------>
16
ChargePhase q
0
-π
-π/2
0
π/2
-π/2
0
0