surveying-chapter3
DESCRIPTION
Surveying hadoutTRANSCRIPT

1
經緯儀角度測量
目的:
使用經緯儀(Theodolite or Transit)度量
(1)水平角(Horizontal Angle)
(2)縱角(Vertical Angle)
以提供物空間三維坐標計算之資料
功能:
(1)水平角觀測
(2)縱角觀測
(3)視距測量
應用:
(1)地形測量
(2)工程放樣、公路(鐵路)定線
(3)工業量測

2
經緯儀角度測量
發展趨勢:
(1)與電子測距儀(EDM--Electronic Distance
Measurement)結合,並自動紀錄及前端處理:全測
站(Total Station)有助測量之全自動化,並提升成
果品質。
(2)與影像處理技術及人工智慧結合,進一步提升自動化
之程度。
思考:可否取代水準儀?

3
經緯儀之種類
依科技發展之順序,各種經緯儀問世之先後如下:
(1)工程經緯儀(Transit)
(2)光學經緯儀(Theodolite),亦稱方向經緯儀
(3)電子經緯儀(Electronic Theodolite)
(4)全測站(Total Station),亦稱全測儀
(5)數位經緯儀(Digital Theodolite)
註:1.(1)為雙軸,其餘為單軸 (例外:少數之(2))
2.(1)為游標讀數
為光學測微器讀數,其餘為電子式自動讀數(及紀錄)
3.(4)含EDM
4.(5)結合數位攝影機及影像處理技術
4
經緯儀之構造
1. 基座:
基座底鈑,中心固定螺旋,腳螺旋
2. 儀器下部:
下盤(水平度盤),外軸,制動螺旋(Clamp)及微動螺
旋(Tangent Screw)
3. 儀器上部:
上盤(水平度盤之游標盤),內軸,水平及垂直方向之
制動及微動螺旋、水準管、望遠鏡、橫軸、及垂直度盤。

5
經緯儀之構造
註:
1. 以上為工程經緯儀(雙軸經緯儀之構造)
2. 小部份光學讀數之經緯儀亦為雙軸。
3. 大部分之光學經緯儀、及全部之電子經緯儀、全測站及
數位經緯儀為單軸。
(儀器上下部合一)
4. 上述單軸經緯儀無游標之設置,而以光學測微系統或電
子感應式度盤取代。

6
• 雙軸經緯儀
• 游標

7
• 光學經緯儀

8
• 電子經緯儀

9
• 全測站

10
• 數位經緯儀

11
水平角觀測
步驟:
1. 定心(光學定心器)
2. 定平(調腳螺旋,使水準氣泡居中)
3. 消除視差(調目鏡,使十字絲清晰)
4. 尋目標及聚焦(調物鏡焦距)
5. 精密對正目標
6. 讀水平讀數,後視(BS, Back Sight)
(a)正鏡(Face Left,縱角度盤在左) (Direct)
(b)倒鏡(Face Right,縱角度盤在右) (Reverse)

12
水平角觀測
步驟:
7. 讀水平讀數,前視(FS, Fore Sight)
(a)(b)同6
8. 前視之正倒鏡平均值減去後視之正倒鏡平均值為由後視方向順時針轉至前視方向之水平角值。
9. 重複4、5、6、7以提升品質(精度)

13
水平角觀測
思考:
1. 正倒鏡觀測之目的為何?
2. 步驟8中,若(後視-前視)則意義為何?
(考慮水平度盤之刻劃方式)
3. 步驟2,若觀測方向不同,而氣泡位置改變,則有何意義?如何處理?
4. 步驟9為何可提升精度?
5. 水平角與目標高低是否有關?

14
各種水平角觀測方法
方法:
1. 單角法 (Direct Angle Method)
2. 右側角法 (Angle-to-the-Right)
3. 偏角法 (Deflection Angles)
4. 方向組法 (Direction Method)
5. 複測法 (Repetition Method)

15
1. 單角法
(1)經緯儀置於E,目標C、D,觀測θ
(2)FL,BS:C 得
FL,FS:D 得
(若為雙軸經緯儀則採上盤動作)
(3)FR,BS:C 得
FR,FS:D 得
(4)
C D
E
θ
cV
DV
2
21
CV
DV
CD VV2
C D V V 1

16
2. 右側角法
(1) 經緯儀於B,測夾角α
(2) BS:A 得
FS:C 得
(若為雙軸經緯儀,則採UM)
(3)
註:(1)以上僅採FL
(2)未做FR,有何影響?
B
A
C
α
AC VV
AV
CV

17
3. 偏角法
(1)經緯儀於B,測R角
(2)FR,BS:A 得
(3)FL,FS: C 得
(4)
註:(1) :+ 、 :-
(2)封閉之多邊形,偏角之總和為360度
C
D
L
R
A
B
AV
CV
AC VVR

18
4. 方向組法
(1)儀器於F,求各方向之讀數,方向之差即為夾角
(2)FL:A、B、C、D、E分別讀數
(3)FR:E、D、C、B、A分別讀數
(4)取 (2) 與 (3) 之均值,並化算使FA為O方向
(5)變換度盤,重複(2)、(3)、(4)之步驟變換度盤(起始
方向讀數)之原則:
(a) 先決定方向組數n
(b) 180°/n為每次變換度盤時之增量
例如:n=3則起始方向FA於三組方向觀測時,分別
為0°,60°,120°。近似即可
A
B C D
E
F

19
4. 方向組法
(6)將各方向組之值 (4) 取平均
註:(1)方向組法之目的為何?
(2)單一角度觀測,採方向觀測之概念有何優點?
(3)若使用雙軸經緯儀作方向組法,則
(a) 以UM結合LM作度盤變換FA
(b) 以UM進行FB、FC、FD、FE之觀測
(4)雙軸經緯儀作方向組法精密度較複測法差,方
向組法最適用於單軸經緯儀

20
5. 複測法
適用:雙軸經緯儀
目的:雙軸經緯儀之刻度較單軸經緯儀為粗,使用複測法可減少讀數誤差之影響(以正倒鏡複測三倍角為例)
(1)經緯儀於C,複測∠DCE
(2)上盤→;下盤
(3)∠DCE=
註:多方向夾角之複測法
如右圖,則每次測一角
))0()6((6
1

21
複測法之精密度:
1. 1. 若對點(瞄準)誤差為σp,讀數誤差為σR
2. 2. 假設測角誤差來源僅考慮〝對點〞及〝讀數〞(不考
3. 慮定心,...),則任一方向之誤差為
4. 就複測N倍角而言,
(依照誤差傳播定律),其中N為複測倍角數
2
1
22 )( RP
2
1
22 ]42[2
1PR N
N

22
複測倍數:N(正倒鏡各N次)
針對某一方向:
(讀數總誤差)2 =
(瞄準總誤差)2 =
角度總誤差=
共觀測2N次(正倒鏡各N)
∴ (每一角誤差)2=
∴
222 2 RRR
24 PN
22 42 PNR
22
2
422
1PR
NN
21
22 422
1
PRN
N

23
練習:若 , ,請依下列方法,計算∠BAC之中誤差:
(1)單角法(僅作正鏡觀測)一次
(2)單角法(僅作倒鏡觀測)一次
(3)單角法(正倒鏡均值)一次
(4)單角法(正倒鏡均值)三次平均
(5)複測法三倍正倒鏡
(6)複測法正鏡三倍
(7)複測法倒鏡三倍
A
B
C
5 P 02 R

24
使用經緯儀觀測水平角之主要誤差來源:
1. 儀器各軸間之幾何關係
2. 度盤刻劃誤差
3. 定心之誤差
4. 定平之誤差
5. 瞄準目標之誤差
6. 讀數之誤差
7. 天候條件
儀器精密度
人為觀測之誤差
天候影響

25
觀測方法之改善與精度之提升:
1. 正倒鏡觀測取平均(直立軸水準軸例外)
2. 方向組法
3. 定心器檢查,並自我要求
4. 水準管居中之檢查,並自我要求
5. 增加觀測回數
6. 避開中午之觀測
26
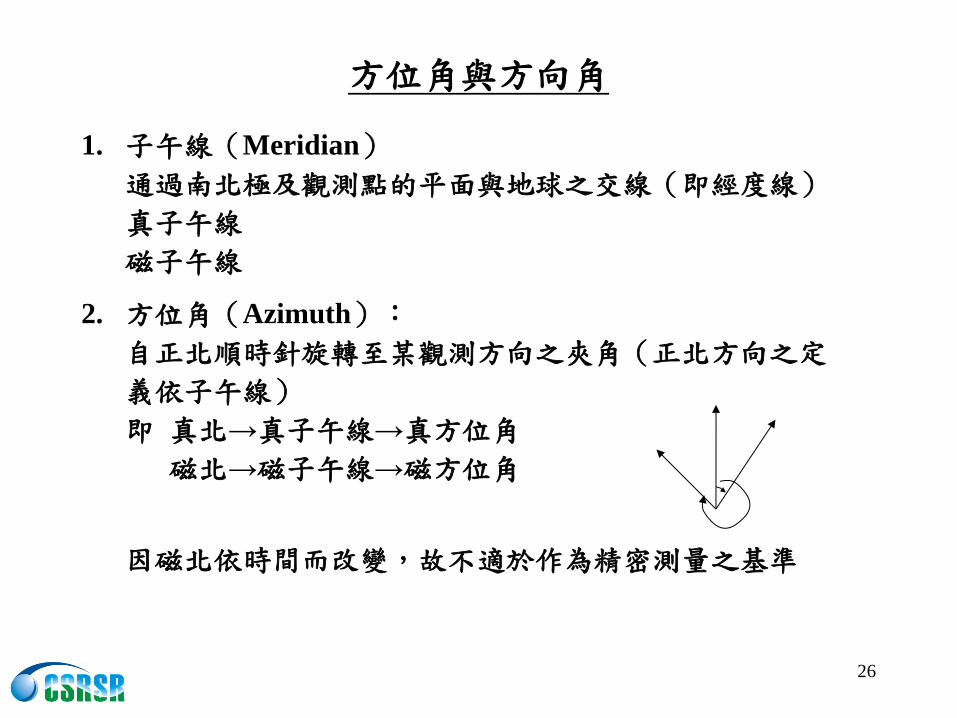
方位角與方向角
1. 子午線(Meridian)
通過南北極及觀測點的平面與地球之交線(即經度線)
真子午線
磁子午線
2. 方位角(Azimuth):
自正北順時針旋轉至某觀測方向之夾角(正北方向之定
義依子午線)
即 真北→真子午線→真方位角
磁北→磁子午線→磁方位角
因磁北依時間而改變,故不適於作為精密測量之基準

27
方位角與方向角
3. 方向角(Bearing):
OA:N70°E,AO:S70°W
OB:S35°E,BO:N35°W
OC:S55°W,CO:N55°E
OD:N30°W,DO:S30°E
註:本課程中使用(真)方位角為主
S
A
B
W
D N
C
O E
30° 70°
55° 35°

28
方位角計算
180 BAAB
AB BA
在小區域(本課程探討範圍)中,
為 之反方位角,反之亦然
若 150AB ,且順時針夾角為∠ABC=120°,
∠BCD=240°,∠CDE=120°,
BCCB CD DC DE求 、 、 、 、

29
方位角計算
則:
註:1. 繪草圖極為重要
2. 方位角大於360°者須減360°,方位角介於0°與360°之
間
150AB
330180 ABBA
90120 BABC
270180 BCCB
150360510240 CBCD
330180 CDDC
90120 DCDE

30
方位角計算
上例為無約制條件(應滿足之條件)之計算。
若有約制條件,同時考慮夾角觀測有誤差,則各夾角需修正。
例如上例,若已知 ,及
且各夾角之觀測值同上
則:由 推算至 之值為 ,此值與應滿足之量
有 之差。
此差稱:閉合差(Misclosure),應對三觀測角進行修正,
使閉合差為零。
150AB 009589 DE
AB DE 000090
009589 001

31
方位角計算
假設為等權觀測,每一夾角應修正 因此,修正後之
夾角分別為 、 、
各方位角為:
023
001
0495119 0495239 0495119
330BA
0495890495119330 BC
0495269 CB
02951490495239 CBCD
0295329 DC
0095890495119 DCDE
(check!)

32
• 使用經緯儀定延長線(Prolonging)之例子:
1. 延長線較短,且通視(Intervisibility)良好,由A、B定P
(經緯儀於A)
2. 延長線較長,通視良好,由A、B定P(經緯儀於B),
Double Centering:
(a)FL-1:A,FR-1:P1
(b)FR-2:A,FL-2:P2
(c)取P1和P2中點為P
A B C
A FR-2
FL-1
B
FR-1
FL-2
P2
P
P1

33
• 使用經緯儀定延長線(Prolonging)之例子:
註:
1. 正倒鏡所造成之方向偏差為對稱
2. 此處修正為P1、P2之半。
與儀器校正中,視準軸 橫軸誤差改正有差異,注
意之!

34
• 使用經緯儀定延長線(Prolonging)之例子:
3. 通視不良,延長線上有障礙物:
(1) 經緯儀於B,量偏角θ及長度d,定出C點(BC=d)
(2) 經緯儀於C,量偏角2θ及長度d,定出D點(CD=d)
(3) 經緯儀於D,量偏角θ,定出E之方向
B A
C
D E
2θA
θ θ

35
• 使用經緯儀定延長線(Prolonging)之例子:
3. 通視不良,延長線上有障礙物:
或
(1) 經緯儀分別於A、B,轉90°,量d=AC=BD,定出C、
D
(2) 由C、D定延長線,並選擇E、F定點
(3) 由E、F轉90°,並量取EG=FH=d,定出G、H點
檢核:∠ACD=∠CDB=∠EGH=∠GHF=90°之值是否在容
許限度內。
A B
C D E F
G H

36
• 使用經緯儀定延長線(Prolonging)之例子:
3. 通視不良,延長線上有障礙物:
或
(1) 經緯儀於B轉90°,量d=BC,定點C
(2) 經緯儀於C轉90°,選擇D,定點
(3) 經緯儀於D轉90°,量d=DE=BC,定點E
(4) 經緯儀於E轉90°,定出F之方向
思考:前述三種方法之優劣比較 思考方向:(1) 自由度
(2) 幾何性
A B
C D
E F

37
• 使用經緯儀定延長線(Prolonging)之例子:
4. 坐標法 (最重要的方法)
(1) 由已知點A、B,計算C、D、E、F之坐標
(2) 進行控制點量測(例如導線測點)求控制點G、H、I、
J、K之坐標
(3) 計算 、 、 、 、 、 、 、 等方位角及距離
(4) 由控制點後視相鄰控制點,並前視待定點方向,量距
後,定出C、D、E、F各點
(5) 檢核
A B
C D
E F
G
H I
J
K
ICICd ID
IDd JEJEd JF
JFd

38
縱角(Vertical Angle)觀測
◎目的:提供間接高程測量計算或水平距離計算之資料
例如:於三角高程測量中
(1) 已知A之高程 ,觀測斜距S,縱角α
,儀器高i及視高z,求B之高程H B
(2)
(3) AB之水平距d=S.cosα
(4) 若已知AB之水平距d,未觀測S
則
練習:自行模擬數據
, , , , ,求 及
(注意 之處理)
AH
ziSHH AB sin
zidHH AB tan
AHAH )( dS dS ii Zz BH
BH

39
縱角與天頂距:
◎縱角:自水平線起算,仰角為+,俯角為-
30°
30°
水平線
天頂
A
B
C
30AB
30AC

40
縱角與天頂距:
◎天頂距(Zenith Distance)
亦稱天頂角(Zenith Angle):自天頂起算
註:
(1) 縱角與水平角獨立不相關
(2) 縱角觀測之基準為水平線,故無後視前視之分別
(3) 縱角觀測亦應作正倒鏡觀測
水平線
天頂
A
B
C
60°
30°
60ABZ
120ACZ

41
縱角及指標差(Index Error):
◎指標差:視準軸水平時,縱角度盤之讀數。
(完美情況:指標差為零)
◎依不同之縱角度盤刻劃方式,縱角及指標差計算如下:
1. 工程經緯儀:0-90-0-90(象限式)
正鏡讀數:
倒鏡讀數:
縱角
指標差
iVV 1
iVV 2
2/)( 21 VVV
2/)( 12 VVi

42
縱角及指標差(Index Error):
2. 方向(單軸)經緯儀(含電子經緯儀):
0° – 90° – 180° – 270° (全周式)
正鏡讀數:I
倒鏡讀數:II
若無指標差,則 I+II=360° 指標差
註:計算前需由觀測量正倒鏡數值判斷為何種度盤刻劃,方
便進行計算。
1802
IIIi
2
)(360 IIIIiIZ

43
經緯儀之主軸及其間應滿足之關係:
1. 直立軸(Vertical Axis)VV:
平轉之旋轉軸
2. 橫軸(Horizontal Axis)HH:
縱轉之旋轉軸(亦稱水平軸)
3. 視準軸(Axis of Sight or Collimation Axis)SS:
物鏡主點與十字絲之連線
4. 水準管軸LL:同水準儀(勿與水平軸/橫軸混淆)

44
◎主軸間應滿足之幾何關係:
1. LL⊥VV
2. HH⊥VV
3. SS⊥HH
4. VV、HH、SS交於一點

45
經緯儀之校正
目的:使各主軸間滿足應有之幾何條件,使觀測量之系統
誤差降至最低
1. LL⊥VV:與水準儀相同(半半改正,盤面水準管校
正)
2. SS⊥HH:
方法一:雙倒鏡法
適用於水平度盤刻劃不夠精密之經緯儀(雙軸,複測,
工程)

46
經緯儀之校正
步驟:
(1) 選擇平坦地,使A、P、B、C約等高,BC間置水準
尺,BC約與AP垂直
(2) 經緯儀於P,FL:A FR:B,定B點
(3) 經緯儀於P,FR:A FL:C,定C點
(4) 定D,使CD = (BC)
(5) 校正十字絲,使視線通過D點
90-e 90-e
90-e 90-e
e
e
e
e
縱角度盤位置
A
P
M
D
C
B
4
1

47
經緯儀之校正
方法二:正倒鏡觀測法
步驟:
(1) 選擇平坦地(儀器中心A,與目標B約等高)
(2) FL:B 讀數R1
(3) FR:B 讀數R2
(4) R=[R1+(R2-180)] /2
(5) 設定水平角讀數為R(調測微器及水平微動螺旋)
(6) 校正十字絲,使視線通過B點
A B

48
經緯儀之校正
註:
為滿足SS⊥HH,所採用的兩種方法比較:
(1) 方法一不需讀水平度盤之讀數,方法二需讀水平度盤之
讀數。因此,若對雙軸經緯儀(複測經緯儀,工程經緯
儀)採用方法二,則因讀數之誤差較大,使得校正不完
整。
(2) 方法二之優點為程序較簡單,但需讀數較精密之經緯
儀。
*思考:不論如何校正,均不可能完美,因此於觀測時應
如何因應?
→正倒鏡觀測

49
經緯儀之校正
3. HH⊥VV
步驟:
(1) 選擇高處目標A
(2) 正鏡觀測A,縱轉望遠鏡(向下),使地面點B
(3) 倒鏡觀測A,縱轉望遠鏡(向下),使地面點C
(4) 取B、C之中點D
(5) 調水平微動,使經緯儀視線通過D點
(6) 縱轉望遠鏡(向上),校正橫軸,使視線通過A
*思考:因(1)橫軸校正困難
(2)校正不可能完美 則應如何因應?
→正倒鏡觀測

50
經緯儀之校正
4. 指標差校正
程序:
(1)先求指標差(選擇目標,作正倒鏡觀測)
(2)校正:
(a)工程經緯儀:指標校正螺旋
(b)光學(單軸)經緯儀:調傾斜螺旋,使目標之縱
角(天頂距)讀數正確,此時指標水準管之符合
氣泡不重合,校正該水準管之校正螺絲,使之符
合。
*思考:校正不可能完美,應如何因應?
→正倒鏡觀測

51
經緯儀之校正
註:俗稱Garbage in Garbage out
即:觀測量品質優良為成果優良之必要條件。此處所稱
〝品質〞之指標即為誤差之大小。而誤差中包括錯誤
、系統誤差及隨機誤差。儀器之校正主要在於降低系
統誤差。然而此種校正均不可能完美。因此於實務中
之觀測亦應將此一因素納入考慮,而採用適當之處
理。
即:正倒鏡觀測。然而,是否正倒鏡觀測可消除所有之系
統誤差?此一問題之解答需基於下面儀器誤差對角
度觀測影響分析。

52
儀器誤差對水平角觀測之影響:
(本單元因涉及球面三角之運算,故推導過程略,僅列結果)
1. SS HH,誤差為C,縱角h
則視準軸之水平方向誤差(C)=C.sec h
水平角觀測均考慮兩目標
故另一方向之誤差為(C)*=C.sec h*
水平角誤差△= C.(sec h*–sec h)
當h*=h,△=0
即當兩目標物高程相等,SS HH對水平角無影響。

53
儀器誤差對水平角觀測之影響:
【問題】:
(1)△= C.(sec h*-sec h)為何不用誤差傳播定律?
(2)h*≠h時,應如何處理?
【答】:
(1)因為探討者為系統誤差,純為幾何問題,與〝散佈〞
無關。
(2)採正倒鏡觀測後,取平均值即可。
因為:對任一目標,正鏡誤差(C)=C.sec h
倒鏡誤差(C)**= – C.sec h
故正倒鏡平均後((C)+(C)**)/2=0
注意:正倒鏡間,C方向相反,因此有正負號差異。

54
儀器誤差對水平角觀測之影響:
2. HH VV誤差為 i,縱角為h
則水平方向誤差:(i)=i.tan(h)
另一方向誤差:(i)*=i.tan(h*)
故水平角誤差: = i.(tan(h*) –tan(h))
若h*=h,=0
即當兩目標物高程相等時,HH VV對水平角無影響

55
儀器誤差對水平角觀測之影響:
【問題】:
(1) = i.(tan(h*) -tan(h))為何不用誤差傳播定律
(2)h*≠h時,應如何處理?
【答】:
(1)因為探討者為系統誤差,純為幾何問題,與〝散佈〞
無關。
(2)採正倒鏡觀測後,取平均值即可。
因為:對任一目標,正鏡誤差(i)=i.tan(h)
倒鏡誤差(i)**= – i.tan(h)
故正倒鏡平均後((i)+(i)**)/2=0
注意:正倒鏡間,i方向相反,因此有正負號差異。

56
儀器誤差對水平角觀測之影響:
3. VV LL,誤差為V
水平方向誤差:(V)=V.tan(h).sin u
其中h:縱角
u:最大傾斜方向與觀測方向線間之水平夾角
另一目標之水平方向誤差: (V*)=V.tan(h*).sin u*
水平角誤差: =(V)=V.(tan(h*)sin u*-tan(h)sin u)
◎注意:與前C即i之特性不同。即正倒鏡觀測間V之方向
不變;亦即其正負號不變。因此此種誤差無法由
正倒鏡觀測之平均值而抵銷。故VV⊥HH之校正
(半半改正)甚為重要,且於觀測過程中,隨時
注意盤面水準管氣泡是否居中。

57
儀器誤差對水平角觀測之影響:
思考:
水準管之設置在於使直立軸與垂線(重力線)相符。若直立軸與垂線相符,而水準氣泡不居中,則表示LL不正確,應進行半半改正。然而,更進一步思索:若LL VV,則是否可能保持VV與垂線相符?亦即若對未經改善(半半改正)完整之經緯儀是否仍可使用,而完成VV與垂線相符之目的?答案是〝可能〞。
方法:
先對某一目標,使氣泡居中,平轉180°,視氣泡偏若干,例如右偏兩格,則調腳螺旋修正一半,即偏一格。此時在平轉180°,可得氣泡左偏一格,此時VV與垂線已一致。因此,只要經緯儀在平轉180°之鏡位中,氣泡左、右偏為對稱,則VV與垂線一致。

58
儀器誤差對水平角觀測之影響:
4. 度盤偏心:
直立軸未通過度盤中心
補償:讀A、B游標(在180°對稱位置)並取平均。光
學經緯儀之測微系統中,上、下線對正之條件
已考慮此因素。
5. 視準軸偏心:
視準軸與直立軸不交於一點
補償:正倒鏡觀測取平均值

59
儀器誤差對水平角觀測之影響:
6. 度盤刻劃不均勻之誤差:
補償:變換度盤之起始方向
(方向組法之主要目的)
思考:
從隨機誤差、系統誤差、及錯誤等三個方向思考,為何
經緯儀水平角觀測時需做正倒鏡觀測
本單元練習題:參考附錄-單元III