symulatory jazdy samochodem – wirtualne środowiska badań ... · ukŁadu...
TRANSCRIPT

ZBIGNIEW LOZIA
SYMULATORY JAZDY SAMOCHODEM – WIRTUALNE RODOWISKA BADA UKŁADU KIEROWCA-POJAZD-OTOCZENIE
Streszczenie Artykuł przedstawia przegl d konstrukcji symulatorów jazdy samochodem: od
prostych trena erów do symulatorów klasy wiatowej. Opisane b dzie wirtualne ro-dowisko symulatora jazdy samochodem autoPW zbudowanego na Wydziale Trans-portu Politechniki Warszawskiej oraz nowe konstrukcje symulatorów dynamicznych powstałych jako efekt współpracy z krajowym producentem symulatorów.
Słowa kluczowe: symulator jazdy samochodem, trena er, symulacja
1. WprowadzenieStatystyki wypadków drogowych wskazuj , e kierowcy s , w ogromnej wi kszo ci
przypadków, ich sprawcami. Poprawa bezpiecze stwa ruchu drogowego musi si wi za ze zmianzachowa kieruj cych pojazdami, wzrostem poczucia odpowiedzialno ci za swe zachowanie, podejmowane decyzje. Niezb dnym jest rozpoznanie zagro e płyn cych z ich strony. Badania kieruj cych pojazdem w warunkach ruchu drogowego jest niebezpieczne i drogie. Trudno jest uzyska powtarzalno wyników. Lepszym rozwi zaniem s testy na torze badawczym, bez udziału ruchu drogowego. Niedogodno ci zwi zan z tego typu badaniami jest zale no od warunków atmosferycznych, pory roku oraz trudno ci w dost pie do toru, co cz sto wi e si z niemałymi kosztami.
Rozwój technik symulacyjnych, wzrost wydajno ci komputerów i układów do generowania obrazów umo liwił budow wirtualnych rodowisk bada kierowców – symulatorów jazdy samochodem. Zastosowanie ich zwi ksza niezale no od warunków atmosferycznych, sprzyja wzrostowi powtarzalno ci wyników. Poza badaniami kierowcy i jego rodowiska pracy, wyposa enia i stanu technicznego pojazdu, obecnie symulatory s coraz powszechniej wykorzystywane w procesie szkolenia kierowców, co dopuszcza stosowna dyrektywa Parlamentu Europejskiego i Rady Europy (Dyrektywa 2003/59/WE).
2. Dyrektywa Unii Europejskiej 2003/59/WE a symulatory jazdy samochodemChodzi tu o Dyrektyw 2003/59/WE Parlamentu Europejskiego i Rady z dnia 15 lipca 2003 r.
w sprawie wst pnej kwalifikacji i okresowego szkolenia kierowców niektórych pojazdów drogowych do przewozu rzeczy lub osób, zmieniaj c rozporz dzenie Rady (EWG) nr 3820/85 oraz dyrektyw Rady 91/439/EWG i uchylaj ca dyrektyw Rady 76/914/EWG.

Zbigniew Lozia Symulatory jazdy samochodem – wirtualne rodowiska bada układu kierowca-pojazd-otoczenie
142
Dyrektywa ta zobowi zuje pa stwa członkowskie do zmiany systemu szkolenia kierowców autobusów i autokarów (od 10.09.2008r.) oraz samochodów ci arowych o dopuszczalnej masie całkowitej powy ej 3,5 tony (od 10.09.2009r.). W przewidywanym programie szkole du y nacisk jest poło ony na bezpiecze stwo na drogach, zmniejszenie emisji spalin i zu ycia paliwa. Kierowca nie posiadaj cy stosownych uprawnie (uwzgl dniane s w okresie pierwszych pi ciu lat tzw. prawa nabyte, wynikaj ce ze wcze niejszych regulacji prawnych) powinien przej kurs szkoleniowy dla kwalifikacji wst pnej ko cz cej si wydaniem wiadectwa Kompetencji Zawodowych (Karty Kwalifikacji Kierowcy) wa nej przez 5 lat. Po tym okresie kierowca zobowi zany jest do odbywania co 5 lat szkole okresowych. Kurs i test dla kwalifikacji wst pnejtrwa 280 godzin, z czego przynajmniej 20 godzin obejmowa musi indywidualn jazd pojazdem danej klasy. Przez maksymalnie 8 z 20 godzin jazdy osoba szkolona mo e kierowa pojazdem po szczególnym terenie lub na wysokiej klasy symulatorze w celu opanowania umiej tno ci kierowania pojazdem w ró nych warunkach drogowych i w przypadku ich zmiany wywołanej zmianwarunków pogodowych, w ró nych porach dnia lub nocy. Egzamin praktyczny mo e si tak e (w cz ci) odbywa w szczególnym terenie lub na wysokiej klasy symulatorze. Kierowca co 5 lat przechodzi szkolenia okresowe, obejmuj ce 35 godzin, w cyklach co najmniej siedmiogodzinnych i cz takiego szkolenia mo e by prowadzona na wysokiej klasy symulatorach. Kursy i testy dla kierowców mog si odbywa w o rodkach szkoleniowych zatwierdzonych przez wła ciwe władze pa stwa członkowskiego Unii Europejskiej. W dyrektywie nie zdefiniowano, niestety, poj : szczególny teren, wysokiej klasy symulator.
3. Struktura funkcjonalna symulatora jazdy samochodemRys. 1 przedstawia struktur funkcjonaln symulatora jazdy samochodem. Składaj si na ni
nast puj ce główne elementy: symulacja zjawisk fizycznych zwi zanych z ruchem pojazdu po nawierzchni drogi; symulacja otaczaj cego pojazd rodowiska wraz z innymi pojazdami oraz układ umo liwiaj cy kierowcy odbiór wielko ci charakteryzuj cych aktualny stan symulowanego obiektu (układ wizualizacji, audio – symulacja efektów d wi kowych, rzeczywista lub wirtualna deska rozdzielcza, układ ruchu symulatora, mechanizmy sterowania pojazdem: koło kierownicy, pedał hamulca, „gazu” i sprz gła, d wignia zmiany biegów). Symulator mo e by prostym stanowiskiem badawczym lub treningowym, daj cym si nawet przemieszcza (dla niektórych rozwi zakonstrukcyjnych) po podłodze pomieszczenia, w którym go umiejscowiono lub (w wersji mobilnej) by przewo onym na terenie całego kraju. Mo e to by tak e całe laboratorium, specjalnie zbudowane w celu prowadzenia bada lub szkolenia kierowców.
Wyró nia si symulator statyczny, w którym kabina i fotel kierowcy pozostaj nieruchome oraz symulator dynamiczny – wyposa ony w układ ruchu, wywołuj cy ruchy fotela kierowcy lub całej kabiny symulowanego pojazdu. Uwa a si (Lozia Z. [5], Weir D.H., Clark A.J. [8]), e dla manewrów charakteryzuj cych si przyspieszeniami nie wi kszymi ni 3,3m/s2 zachowanie kierowcy w symulatorze statycznym wiernie odpowiada rzeczywisto ci.
Operator symulatora (kierowca) poddany jest symulowanym bod com wyst puj cym w trakcie jazdy rzeczywistym samochodem. Najwa niejszymi z nich s bod ce wzrokowe. Kierowca około 80% informacji z otoczenia odbiera za pomoc wzroku (Kemeny A. [3], Lozia Z. [5])). Głównym ródłem tych informacji jest obraz widziany przez szyb przedni i lusterka wsteczne oraz deska

143
rozdzielcza. Do wizualizacji wykorzystuje si w symulatorze monitory, ekranowy układ projekcji (rys. 1) lub układ wizualizacji na głowie kierowcy: okulary VR (Virtual Reality) lub hełmy HMD (Head Mounted Display). Drugim ródłem bod ców s efekty d wi kowe towarzysz ce ruchowi pojazdu (praca silnika i układu nap dowego, hałas opon, opływ powietrza, inne pojazdy). Wa nym ródłem bod ców s opory mechanizmów sterowania pojazdem: opory na kole kierownicy, pedale
„gazu”, hamulca i sprz gła oraz na d wigni zmiany biegów. Informacje o ruchu pojazdu i siłach działaj cych na kierowc odbierane s tak e przez narz d przedsionkowy (równowagi) i receptory czuciowe. W symulatorze ródłem tego typu bod ców jest układ ruchu.
Poza bardzo prostymi rozwi zaniami, symulatory s zazwyczaj wyposa ane w miejsce pracy kierowcy zbli one do rzeczywistego. Chodzi tu głównie o mechanizmy sterowania i deskrozdzielcz . W bardziej zaawansowanych symulatorach stosuje si kompletne kabiny pojazdów (lub ich fragmenty), standardowo wyposa one. Ruch pojazdu oraz opisane wy ej bod ce ssymulowane na jednym lub kilku komputerach. Korzystaj one z rozbudowanych baz danych parametrów modeli ruchu i dynamiki pojazdów, modeli infrastruktury i ruchu drogowego. Sródłem sygnałów dla układów wykonawczych wizualizacji, generatorów d wi ku, mechanizmów
sterowania (opory) oraz układu ruchu. Cało ci pracy symulatora nadzoruje instruktor. Mo e wprowadza sytuacje awaryjne, sprawdzaj c w ten sposób czujno i podzielno uwagi osoby badanej.
Rysunek 1. Ogólna struktura symulatora jazdy samochodem ródło: Kemeny A. [3], Lozia Z. [5].
Studies & Proceedings of Polish Association for Knowledge Management Nr 47, 2011

Zbigniew Lozia Symulatory jazdy samochodem – wirtualne rodowiska bada układu kierowca-pojazd-otoczenie
144
Wi kszo symulatorów jazdy samochodem pracuje w trybie z zamkni t p tl sprz enia zwrotnego. Kierowca reaguje na bod ce wzrokowe, słuchowe i opory mechanizmów sterowania. S one efektem przetworzenia wymusze (k ta obrotu kierownicy, k ta otwarcia przepustnicy silnika, siły nacisku na pedał hamulca, itd.) pochodz cych od niego (kierowcy) przez oprogramowanie symulatora. Osoba badana steruje ruchem wirtualnego pojazdu, gdy jego ruch zale y od aktywno ci tej osoby.
W przypadku symulatorów jazdy samochodem, pracuj cych w trybie z otwart p tlsprz enia zwrotnego, bod ce nie zale od osoby badanej. Reaguje ona na sekwencj wideo zarejestrowan w trakcie jazdy samochodem kierowanym przez inn osob . Oceniane jest działanie osoby badanej na mechanizmach sterowania. Jest ono porównywane z zarejestrowanym wzorcem. Tego typu symulator (tzw. wideo-symulator, SINTEF [17]) jest zainstalowany w norweskiej organizacji badawczej SINTEF. Od roku 1992 wykorzystywany jest on do oceny kierowców z osłabionym wzrokiem, ułomno ciami w zakresie percepcji, zdolno ci nabywania wiedzy oraz zaburzeniami, wynikaj cymi z urazów głowy, chorób mózgu. Badania te zlecane s przez Ministerstwo Zdrowia Norwegii i regionalnych naczelnych lekarzy. Maj na celu ocen zdolno ci testowanej osoby do prowadzenia samochodu.
4. Klasyfikacja symulatorów jazdy samochodemW chwili obecnej istnieje bardzo du a liczba symulatorów jazdy samochodem (ponad 100). S
to urz dzenia o ró nym przeznaczeniu, stopniu zaawansowania technologicznego, gabarytach i kosztach wykonania. Korzystaj c z sugestii zawartych w pracy Weir D.H., Clark A.J. [8] dokonano umownego podziału symulatorów jazdy samochodem na:
- proste symulatory treningowe (ang. simple training simulators), - symulatory klasy redniej (ang. mid-level driving simulators), - wyrafinowane symulatory „klasy wiatowej” (ang. very sophisticated „world class”
driving simulators). Oto ich krótka charakterystyka i przykłady konkretnych konstrukcji.
Proste symulatory treningowe (rys. 2 i 3) maj cechy wspólne z grami komputerowymi. Ró ni je od nich bardziej realistyczne mechanizmy sterowania. W pierwszych konstrukcjach tego typu stosowano ubo sz grafik i efekty d wi kowe. Wbrew pozorom te cechy s zaletami, gdyw grach komputerowych nie dba si zazwyczaj o zgodno własno ci ruchowych modelu pojazdu z obiektem rzeczywistym a chodzi jedynie o zafascynowanie gracza i przyci gni cie jego uwagi. Obecnie oferowane symulatory tej klasy maj bardzo zaawansowan grafik i efekty d wi kowe. Na rys. 2 widoczna jest rodzina prostych symulatorów FAROS (Francja).

145
Rysunek 2. Rodzina prostych symulatorów treningowych FAROS, Francja (FAROS ródło: [12].
S to typowe symulatory treningowe. Program szkolenia jest zgodny z Francuskim Narodowym Programem Nauki Jazdy (French National Program of Driving Training) obejmuj cym testy w rzeczywisto ci wirtualnej, przed nauk w warunkach rzeczywistych. Głównym celem szkolenia jest osi gni cie u przyszłych kierowców zrozumienia ryzyka i zagro etowarzysz cych je dzie samochodu. W Polsce produkcj prostych symulatorów zajmuje sie firma EduCar (rys. 3). Oferuje stanowiska wykorzystywane w trakcie szkolenia kierowców samochodów osobowych, ci arowych, autobusów i niektórych samochodów specjalnych. Proste symulatory treningowe nie spełniaj oczekiwa Dyrektywy 2003/59/WE. Stanowi mog istotny element uzupełniaj cy w trakcie szkolenia kierowców.
Studies & Proceedings of Polish Association for Knowledge Management Nr 47, 2011

Zbigniew Lozia Symulatory jazdy samochodem – wirtualne rodowiska bada układu kierowca-pojazd-otoczenie
146
Rysunek 3. Prosty symulator treningowych EduCar, Polska EduCar ródło: [11].
Symulatory klasy redniej (rys. 4–9) charakteryzuj si nast puj cymi, wymaganymi własno ciami (Lozia Z. [5], Weir D.H., Clark A.J. [8]): du ym ekranem (ekranami), na którym dokonuje si projekcji obrazu widzianego przez kierowc przed pojazdem (przek tna co najmniej 1,5 m); k tem widzenia 50÷60° w płaszczy nie poziomej; obrazem generowanym komputerowo; realistyczn kabin pojazdu, ze wszystkimi mechanizmami sterowania i desk rozdzielcz oraz naturalnymi polami widzenia przez szyby kabiny; modelem matematycznym ruchu pojazdu opisuj cym dynamik wzdłu n i poprzeczn , z uwzgl dnieniem zmian reakcji normalnych drogi, nieliniowo ci charakterystyk kół ogumionych, w tym ł cznego opisu sił wzdłu nych i bocznych opony; powinien by wyposa ony w system akwizycji danych (rejestracja wyników bada ). Układ ruchu symulatora nie jest konieczny. Mo e to by statyczny symulator. Powinien umo liwiaw łatwy sposób zmiany danych pojazdu oraz otoczenia w jakim badany jest ruch. Obszarami zastosowa powinny by : badania kierowców przez psychologów transportu, ocena rozwi zakonstrukcyjnych pojazdów oraz organizacji ruchu drogowego.
Rysunki 4 i 5 przedstawiaj symulator autoPW zbudowany na Politechnice Warszawskiej. Jego pierwsza wersja została uruchomiona w roku 1998. Stanowi on główne wyposa enie Pracowni Bada Symulacyjnych Ruchu Samochodu Wydziału Transportu PW. Jest to symulator statyczny z w pełni wyposa on kabin samochodu osobowo-towarowego (odpowiada połowie kabiny samochodu osobowego). Urz dzenie umo liwia badania kierowcy w normalnych warunkach ruchu pojazdu oraz w sytuacjach przedwypadkowych.

147
Rysunek 4. Symulator klasy redniej autoPW zbudowany i eksploatowany na Politechnice Warszawskiej (grafika: wersja z 1998 r.)
ródło: Lozia Z. [5], autoPW [13].
Rysunek 5. Obraz widziany przez osob badan w symulatorze autoPW zbudowanym i eksploato-wanym na Politechnice Warszawskiej (grafika: wersja od 2003 r.)
ródło: Lozia Z. [5], autoPW [13].
Studies & Proceedings of Polish Association for Knowledge Management Nr 47, 2011

Zbigniew Lozia Symulatory jazdy samochodem – wirtualne rodowiska bada układu kierowca-pojazd-otoczenie
148
Na rys. 6 przedstawiono symulator firmy Autosim (Norwegia). Jest to typowo komercyjny produkt, jednak jego wielu nabywców pochodzi z instytucji badawczych i uniwersytetów. Firma oferuje symulatory statyczne oraz dynamiczne. Kabiny pojazdów maj standardowe wymiary i sw pełni wyposa one. Mo liwe jest ich adaptowanie dla niepełnosprawnych kierowców. Oprogramowanie graficzne i sprz t wizualizacyjny umo liwiaj prezentacj obrazów o k cie widzenia do 180° w płaszczy nie poziomej na prostok tnych lub cylindrycznych ekranach. Symulator wyposa ony jest w generator scenerii – program do budowy otoczenia graficznego, w którym porusza si wirtualny pojazd. Jest on uzupełniony o program do tworzenia ruchu drogowego i ulicznego wraz z algorytmami automatycznej oceny działa kierowcy.
Rysunek 6. Symulator klasy redniej firmy Autosim (Norwegia). Obrazy VR laboratorium z symulatorem samochodu ci arowego
ródło:Autosim [10]. Rys. 7 i 8 przedstawia jeden z symulatorów zbudowanych w Szwedzkim Narodowym
Instytucie Bada Dróg i Transportu (VTI Linköping). W 2003 roku oddano do eksploatacji najnowsz wersj symulatora VTI, nazywan VTI Driving Simulator III (rys. 7 i 8). Platforma wibracyjna wraz z podstaw mo e by przemieszczana wzdłu (dla testów z przewag hamowania i przyspieszania pojazdu) lub w poprzek (dla testów z przewag ruchu krzywoliniowego pojazdu) w zakresie ±3,75m z pr dko ci do 4m/s. Maksymalne symulowane przyspieszenie wzdłu ne lub boczne wynosi 8m/s2. Dodano wizualizacj obrazu otoczenia za pojazdem, wykorzystuj c do tego celu małe monitory zast puj ce lusterka wsteczne samochodu. Instytut VTI wykorzystuje zbudowane przez siebie symulatory do bada stateczno ci i kierowalno ci samochodów, do oceny
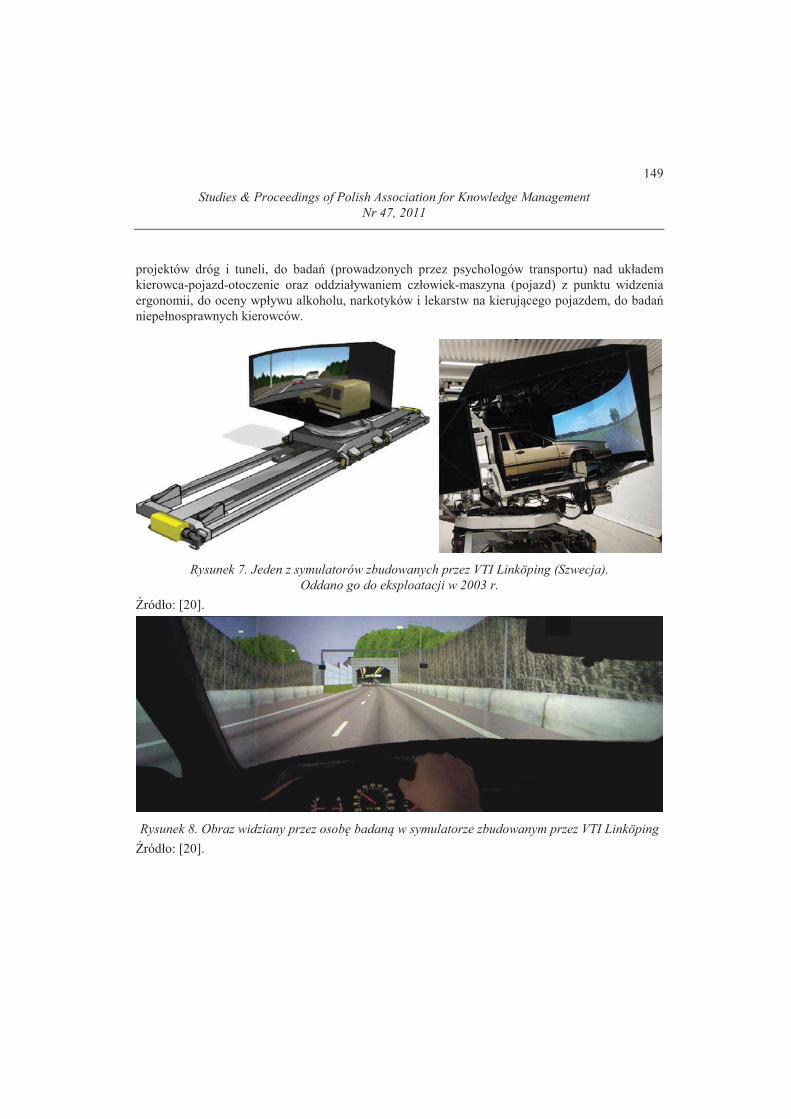
149
projektów dróg i tuneli, do bada (prowadzonych przez psychologów transportu) nad układem kierowca-pojazd-otoczenie oraz oddziaływaniem człowiek-maszyna (pojazd) z punktu widzenia ergonomii, do oceny wpływu alkoholu, narkotyków i lekarstw na kieruj cego pojazdem, do badaniepełnosprawnych kierowców.
Rysunek 7. Jeden z symulatorów zbudowanych przez VTI Linköping (Szwecja). Oddano go do eksploatacji w 2003 r.
ródło: [20].
Rysunek 8. Obraz widziany przez osob badan w symulatorze zbudowanym przez VTI Linköping ródło: [20].
Studies & Proceedings of Polish Association for Knowledge Management Nr 47, 2011

Zbigniew Lozia Symulatory jazdy samochodem – wirtualne rodowiska bada układu kierowca-pojazd-otoczenie
150
Na rys. 9 pokazano symulator klasy redniej Uniwersytetu Leeds (etap 3). Jest wykorzystywany przez multidyscyplinarny zespół badawczy „The ITS Safety Group”. W symulatorze wykorzystano kabin samochodu osobowego z w pełni działaj c deskrozdzielcz , aktywnymi oporami na mechanizmach sterowania. Nap dzany elektrycznie układ ruchu symulatora ma 8 stopniu swobody i mo liwo symulowania przyspiesze translacyjnych ±(5 plus 6 m/s2), przyspiesze k towych około 300°/s2, pr dko ci translacyjnych ±(od 2 do 3m/s plus 0,8 m/s), pr dko ci k towych od 40 do 50°/s. Układ projekcji obrazu składa si z o miu projektorów. K t widzenia w płaszczy nie poziomej wynosi 250° plus 60° centralnego widoku do tyłu widzianego w lusterku wstecznym wewn trznym i dwóch zewn trznych lusterkach bocznych (monitorach LCD); w płaszczy nie pionowej wynosi 45°. Symulator wyposa ono w układ ledz cy wzrok kierowcy. Kabina pojazdu jest wyposa ana w urz dzenia maj ce na celu wspomaganie pracy kierowcy. W zaprogramowanych testach oceniana jest przydatno tego dodatkowego wyposa enia samochodu. Symulator Uniwersytetu Leeds jest wykorzystywany w badaniach bezpiecze stwa ruchu drogowego, w ocenie zachowa kierowców i przydatno ci urz dzetelematycznych, ITS wprowadzanych do motoryzacji.
Rysunek 9. Symulator klasy redniej Uniwersytetu Leeds (Wielka Brytania, etap 3) ródło: [14].
Wyrafinowanymi symulatorami „klasy wiatowej” (rys. 10–12) s w chwili obecnej trzy sy-mulatory:
– symulator firmy Mercedes-Benz (wersja z roku 2010, rys. 10), Sindelfingen, Niemcy;
- symulator NADS (National Advanced Driving Simulator, 2001 r, rys. 11), Iowa, USA; - symulator firmy Toyota, Japonia (2007 r., rys. 12).

151
Charakteryzuj si one k tami widzenia 360° w płaszczy nie poziomej i ponad 35°w płaszczy nie pionowej. Układy ruchu tych symulatorów maj 7 (Mercedes-Benz) lub 12 (NADS, Toyota) stopni swobody. Kabina pojazdu ma 6 stopni swobody. Jest umieszczona na ramie poruszanej synergicznym sze ciokolumnowym układem wzbudników – heksapodem (k ty przechyłu wzdłu nego i bocznego ±25°). Układ ten jest posadowiony na ruchomej podstawie o szerokim zakresie ruchów wzdłu nych (±9,75m w przypadku NADS i ±17,5m w przypadkuToyoty) i bocznych (±6 m w przypadku Mercedes-Benza, ±9,75m w przypadku NADS i ±10m w przypadku Toyoty). Istotnymi elementami wyró niaj cymi symulatory NADS i Toyoty s : obrotowy stół o k cie obrotu ±330° umieszczony na platformie podtrzymywanej wzbudnikami (plus ±30° obrotu za pomoc heksapodu), cztery wzbudniki wysokocz stotliwo ciowe (amplituda ±0,05m) w punktach mocowania zawieszenia kół jezdnych oraz mo liwo wzdłu nego przemieszczania ruchomej podstawy. Układy ruchu tych symulatorów pozwalaj na uzyskanie chwilowych warto ci przyspiesze w trzech prostopadłych kierunkach (wzdłu nym, poprzecznym i pionowym) dochodz cych do 10–12m/s2 oraz przyspiesze k towych kabiny 120–200°/s2 (obrót wokół osi pionowej, przechył wzdłu ny i boczny).
Rysunek 10. Symulator klasy wiatowej firmy Mercedes-Benz (Niemcy, 2010 r.) ródło: Informacja medialne [15, 18].
Studies & Proceedings of Polish Association for Knowledge Management Nr 47, 2011

Zbigniew Lozia Symulatory jazdy samochodem – wirtualne rodowiska bada układu kierowca-pojazd-otoczenie
152
Rysunek 11. Symulator klasy wiatowej NADS. Kabina samochodu i obraz widziany przez osob badan
ródło: Lozia Z. [5], NHTSA 16].
Rysunek 12. Symulator klasy wiatowej firmy Toyota (oddany do u ytku jesieni 2007 r.). Widok ogólny oraz kabina samochodu i obraz widziany przez osob badan
ródło: Toyota [19], informacja medialna [21]. Budowa nowego centrum badawczego Mercedes-Benz, w którym istotn cz ci jest nowy
symulator, pochłon ła około 160 mln Euro (rok 2010). Symulator Toyoty kosztował około 36 mln Euro (2007 r.). Koszt budowy symulatora NADS wraz z infrastruktur wynosił nominalnie 45,68 mln USD (rok 1996). Roczny koszt jego utrzymania wynosi około 4 mln USD, za godzina wykorzystania kosztuje od 1000 do 2000 USD. Kwoty te pozwalaj uzmysłowi sobie skalprzedsi wzi cia zwi zanego z budow tego typu stanowisk badawczych.

153
5. Zastosowania symulatorów jazdy samochodemSymulatory s stosowane w szkoleniu i doszkalaniu kierowców, niektóre do treningu osób
niepełnosprawnych i sprawdzania, czy ich dysfunkcje nie ograniczaj mo liwo ci prowadzenia pojazdów. Wiele symulatorów słu y do oceny zachowania kierowców w sytuacjach przedwypadkowych, w stanie po spo yciu lekarstw, alkoholu, pod wpływem narkotyków, w stanie du ego zm czenia. Projektanci dróg i tuneli korzystaj z symulatorów w fazie opracowywania koncepcji rozwi za komunikacyjnych, o wietlenia dróg, okre lania kolorystyki i o wietlenia tuneli. Oceniane s zagro enia bezpiecze stwa ruchu drogowego, wynikaj ce z u ywania przez kierowc telefonu komórkowego lub nawigacji satelitarnej w trakcie jazdy samochodem. Symulatory o najbardziej zaawansowanej konstrukcji, dysponuj ce zło onymi modelami ruchu pojazdu wykorzystywane s tak e w badaniach nowych rozwi za konstrukcyjnych pojazdu, zwi kszaj cych jego bezpiecze stwo czynne. Oceniana jest tak e ergonomiczno nowych rozwi za konstrukcyjnych kabiny pojazdu.
W przypadku symulatorów treningowych podawane s nast puj ce korzy ci wynikaj ce z zastosowania symulatorów (za ródłami norweskimi i francuskimi: Autosim [10], Faros-Renault [12], SINTEF [17]): w o rodkach szkolenia kierowców zmniejszyły si koszty utrzymania pojazdów (o 30% koszty napraw, o 3–5% zu ycie paliwa), zmalało zagro enie osób szkol cych i szkolonych (o 15% mniej powa nych w skutkach wypadków); w cz ci szkolenia, w której zastosowano symulatory czas treningu zmniejszył si o 40–50%; nast piła poprawa zachowania kierowców w ruchu drogowym; armia norweska rocznie oszcz dza około 1mln Euro dzi ki wprowadzeniu symulatorów jazdy; badania prowadzone w Kanadzie wykazały spadek liczby wypadków o 22% dzi ki zastosowaniu w szkoleniu kierowców symulatorów jazdy samochodem. Osobami poddawanymi szkoleniu s głównie ludzie młodzi. Ta grupa przyszłych kierowców zwi zana jest z wysokim prawdopodobie stwem wyst pienia wypadku, co wynika z dwóch przyczyn: wieku (ludzie młodzi łatwiej podejmuj ryzyko), posiadanego do wiadczenia (a raczej jego braku).
6. Przykład symulatora spełniaj cego oczekiwania Dyrektywy Unii Europejskiej 2003/59/WEPolskie Ministerstwo Infrastruktury powołało grup robocz , której zadaniem było
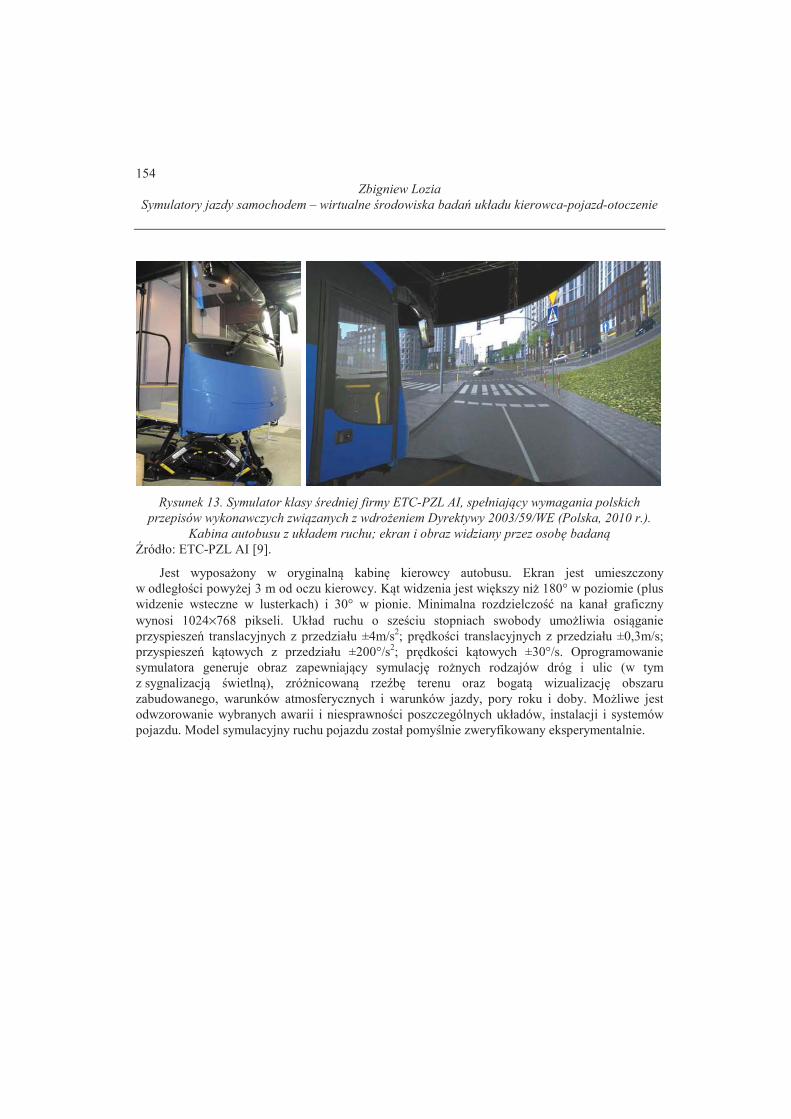
opracowanie zestawu wymaga minimalnych dla symulatorów wysokiej klasy. Wyniki prac zespołu przedstawiono w publikacji Lozia Z. i inni [6]. Wymagania te, po zako czeniu procesu konsultacji społecznych i mi dzyresortowych, stan si podstaw certyfikacji symulatorów w my l Dyrektywy 2003/59/WE. Wiele symulatorów, co najmniej klasy redniej, ma szanse spełni te wymagania. S to głównie produkty pochodz ce spoza Polski. Wyj tkiem s symulatory firmy ETC-PZL AI z Warszawy (ETC-PZL AI [9]). Rys. 13 przedstawia symulator klasy redniej firmy ETC-PZL AI, spełniaj cy wymagania polskich przepisów wykonawczych zwi zanych z wdro eniem Dyrektywy 2003/59/WE (Lozia Z. i inni [6]).
Studies & Proceedings of Polish Association for Knowledge Management Nr 47, 2011
Zbigniew Lozia Symulatory jazdy samochodem – wirtualne rodowiska bada układu kierowca-pojazd-otoczenie
154
Rysunek 13. Symulator klasy redniej firmy ETC-PZL AI, spełniaj cy wymagania polskich przepisów wykonawczych zwi zanych z wdro eniem Dyrektywy 2003/59/WE (Polska, 2010 r.).
Kabina autobusu z układem ruchu; ekran i obraz widziany przez osob badan ródło: ETC-PZL AI [9].
Jest wyposa ony w oryginaln kabin kierowcy autobusu. Ekran jest umieszczony w odległo ci powy ej 3 m od oczu kierowcy. K t widzenia jest wi kszy ni 180° w poziomie (plus widzenie wsteczne w lusterkach) i 30° w pionie. Minimalna rozdzielczo na kanał graficzny wynosi 1024×768 pikseli. Układ ruchu o sze ciu stopniach swobody umo liwia osi ganie przyspiesze translacyjnych z przedziału ±4m/s2; pr dko ci translacyjnych z przedziału ±0,3m/s; przyspiesze k towych z przedziału ±200°/s2; pr dko ci k towych ±30°/s. Oprogramowanie symulatora generuje obraz zapewniaj cy symulacj ro nych rodzajów dróg i ulic (w tym z sygnalizacj wietln ), zró nicowan rze b terenu oraz bogat wizualizacj obszaru zabudowanego, warunków atmosferycznych i warunków jazdy, pory roku i doby. Mo liwe jest odwzorowanie wybranych awarii i niesprawno ci poszczególnych układów, instalacji i systemów pojazdu. Model symulacyjny ruchu pojazdu został pomy lnie zweryfikowany eksperymentalnie.

155
Bibliografia1. Allen W. R., Rosenthal T. J., Aponso B. L., Klyde D. H., Anderson F. G., Chrstos J.P., A low
cost PC based driving simulator for prototyping and hardware-in-the-loop applications.SAE 980222.
2. Drosdol J., Panik F., The Daimler-Benz Driving Simulator. A tool for vehicle development.SAE 850334.
3. Kemeny A., Simulation and perception. Driving Simulation Conference, DSC 1999. July 7–8, 1999. Paris, France. pp. 13–20.
4. Laurell H., Lidström M., Mor n B., Nordmark S., The use of simulators for studies of driverperformance. VTI särtryck, No 115. 1987.
5. Lozia Z., Symulatory jazdy samochodem. WKŁ. Warszawa. 2008.6. Lozia Z., Cup A., Mitraszewska I., Pi tka T., Wi ckowski D., Wymagania minimalne dla
„symulatorów wysokiej klasy” stosowanych w szkoleniu kierowców. Logistyka, nr 4, lipiec–sierpie 2010 r. Dział Logistyka – nauka, s. 20 plus tekst *.pdf na płycie CD (9 stron).
7. Nordmark S., The new Trygg Hansa Truck Driving Simulator. An advanced tool for researchand training. International Symposium on Advanced Vehicle Control 1992 (AVEC’92),17÷17 September 1992, Pacific Convention Plaza, Yokohama, Japan. (VTI särttryck, Nr 187,1992).
8. Weir D. H., Clark A. J., A survey of mid-level driving simulators. SAE 950172.9. http://www.ai.com.pl/.10. http://www.autosim.no/ lub http://www.autosim.biz .11. http://www.educar.pl/.12. http://www.faros.com/english/index.htm lub http://www.faros.com/eauto.html.13. http://www.it.pw.edu.pl/autopw/en/main.html.14. http://www.its.leeds.ac.uk/research/facilities/uolds/.15. http://www.newlaunches.com/archives/mercedesbenz_unveils_new_state_of_the_art_driving_
simulator_with_full_360_viewin.php. 16. http://www.nhtsa.dot.gov/people/perform/nads/ lub http://www-nrd.nhtsa.dot.gov/ depart-
ments/nrd-12/NationalAdvancedDriverSimulator.html or http://www.nads-sc.uiowa.edu/.17. http://www.sintef.no/content/page1____5513.aspx.18. http://www.topspeed.com/cars/car-news/new-state-of-the-art-driving-simulator-for-mercedes-
benz-ar97645.html.19. http://www.toyota.co.jp/en/news/07/1126_1.html.20. http://www.vti.se/eWeb/R&D/Simul.htm lub http://www.vti.se/info/foresurs/edetalj.asp? Re-
cID=646&Lang=E.21. http://www.zercustoms.com/photos/Toyota-Driving-Simulator.html.
Studies & Proceedings of Polish Association for Knowledge Management Nr 47, 2011

Zbigniew Lozia Symulatory jazdy samochodem – wirtualne rodowiska bada układu kierowca-pojazd-otoczenie
156
DRIVING SIMULATOR – VIRTUAL ENVIRONMENT FOR DRIVER-VEHICLE-SURROUNDING SYSTEM RESEARCH
Summary The paper presents the general design of a driving simulator and a brief over-
view of selected concepts in its construction. Three types of simulators have been discussed: simple for training purposes, mid-level and world-class simulators. Ex-emplary applications in testing behaviour of the driver during normal driving condi-tions have been listed and in preaccidental situations. A possibility has been men-tioned to use driving simulators during basic training and supplementary training of drivers, especially in the context of recommendations of the European Directive 2003/59/EC, which allows the use of top-of-the-range simulator simulators in the in-itial qualification and periodical training.
Keywords: driving simulators, trainers, simulation
Zbigniew Lozia Wydział Transportu Politechnika Warszawska ul. Koszykowa 75, 00-662 Warszawa e-mail: [email protected] Przemysłowy Instytut Motoryzacji (PIMOT) ul. Jagiello ska 55, 03-301 Warszawa