systems design review - edgeedge.rit.edu/edge/p16241/public/systems level design documents... ·...
TRANSCRIPT

Systems Design ReviewP16241 – AUTONOMOUS PEOPLE MOVER PHASE I I I
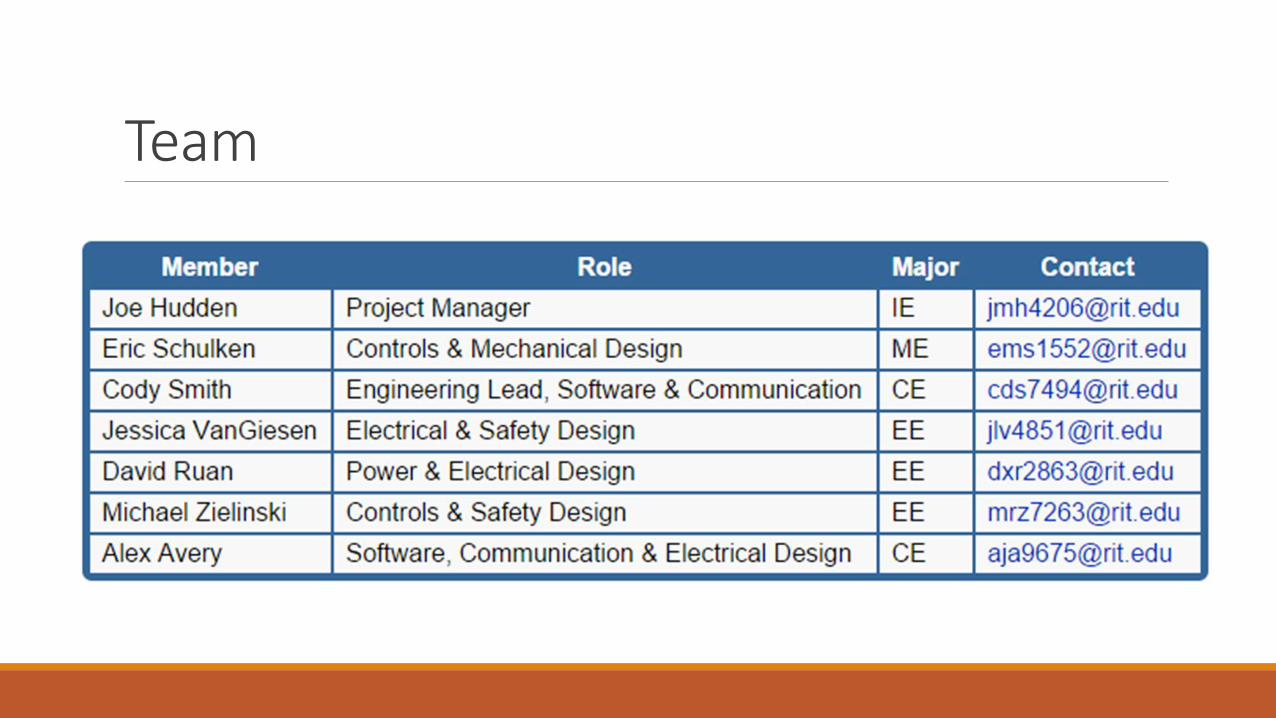
Team

Agenda•Problem Definition Review• Background
• Problem Statement
• Project Scope
• Customer Requirements
• Engineering Requirements
• House of Quality
•Systems Design• Functional Decomposition
• System Architecture
• Morphological Chart
• Considered Concepts
• Pugh Analysis Criteria
• Pugh Analysis
• Selected Concept
• Benchmarking
• Feasibility Analysis
• Risk Assessment
• Updated Schedule
BackgroundRochester Institute of Technology is re-entering the field of autonomous vehicle research.
Research and development of autonomous vehicles are becoming more and more popular in the automotive industry. It is believed that autonomous vehicles are the future for easy and efficient transportation that will make for safer, less congested roadways.
Our project will follow the work completed by the Phase I and II teams.

Problem Statement•Current State• There have been two phases of this project so far. The first phase focused on modifying a golf cart into a
remote controlled vehicle. The second phase is working on adding autonomous functionality to the APM in highly restricted settings.
•Desired State• APM is capable of localization, path planning, path following, and object avoidance. APM provides a
simple human-machine interface which displays diagnostic information. Passengers have the ability to take control of the vehicle whether it is moving or stationary.
•Project Goals• APM can drive autonomously on a closed course while avoiding static and moving obstacles, staying on
the designated path, and maintaining the safety of passengers and bystanders
•Constraints• Phase II & CE Team accomplishments; budget; time for research, testing, and debugging; maintaining
the safety of passengers and bystanders

Project ScopePhase I Phase II & CE Team Phase III
• Remote control
• Manual override
• Autonomous forward drive
• Static object detection &
avoidance (stopping)
• Closed course
• Remote & manual override
• Basic path following
• Mounting LiDAR, ultrasonics,
& camera
• Moving object detection &
avoidance
• Algorithms to utilize LiDAR,
ultrasonics, & camera
• More advanced object analysis
• Waterproofing electronics
• Path planning
• Basic user interface
• Emergency stop?
Customer RequirementsCustomer
Rqmt. #Importance Description
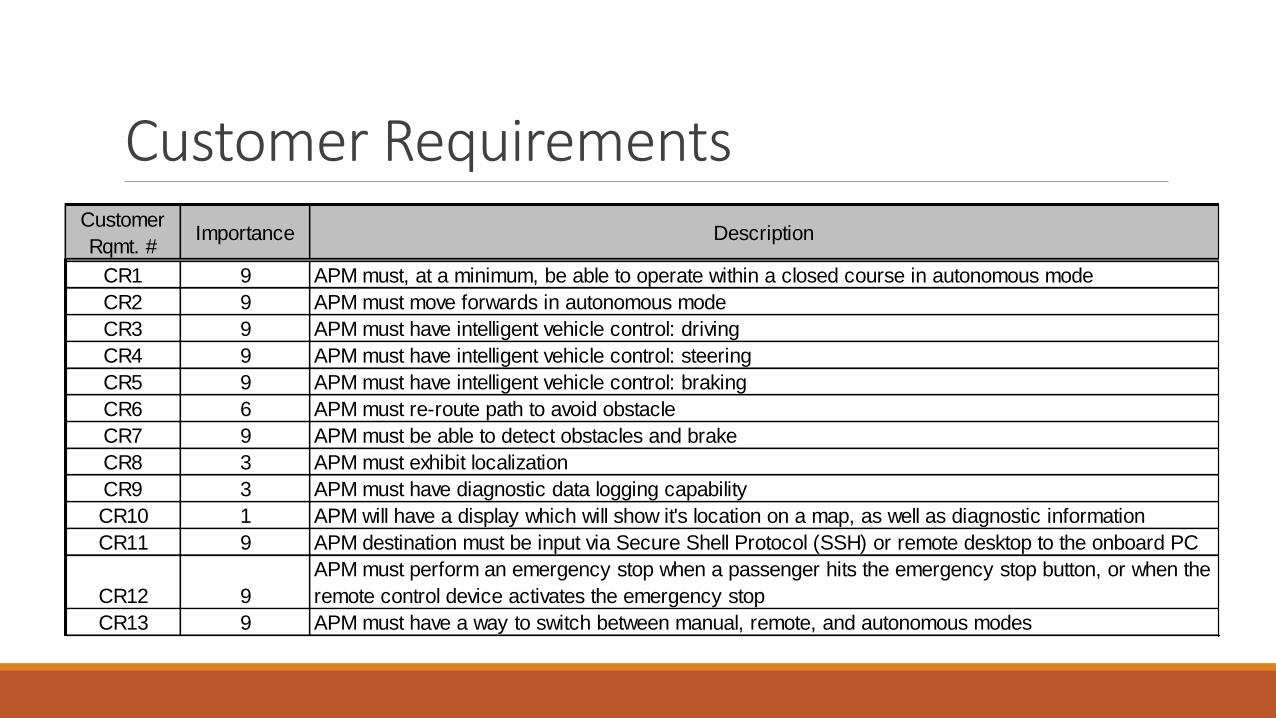
CR1 9 APM must, at a minimum, be able to operate within a closed course in autonomous mode
CR2 9 APM must move forwards in autonomous mode
CR3 9 APM must have intelligent vehicle control: driving
CR4 9 APM must have intelligent vehicle control: steering
CR5 9 APM must have intelligent vehicle control: braking
CR6 6 APM must re-route path to avoid obstacle
CR7 9 APM must be able to detect obstacles and brake
CR8 3 APM must exhibit localization
CR9 3 APM must have diagnostic data logging capability
CR10 1 APM will have a display which will show it's location on a map, as well as diagnostic information
CR11 9 APM destination must be input via Secure Shell Protocol (SSH) or remote desktop to the onboard PC
CR12 9
APM must perform an emergency stop when a passenger hits the emergency stop button, or when the
remote control device activates the emergency stop
CR13 9 APM must have a way to switch between manual, remote, and autonomous modes
Engineering RequirementsRqmt. # Engr. Requirement (metric)
Unit of
Measure
Minimum
Value
Target
ValueComments/Status
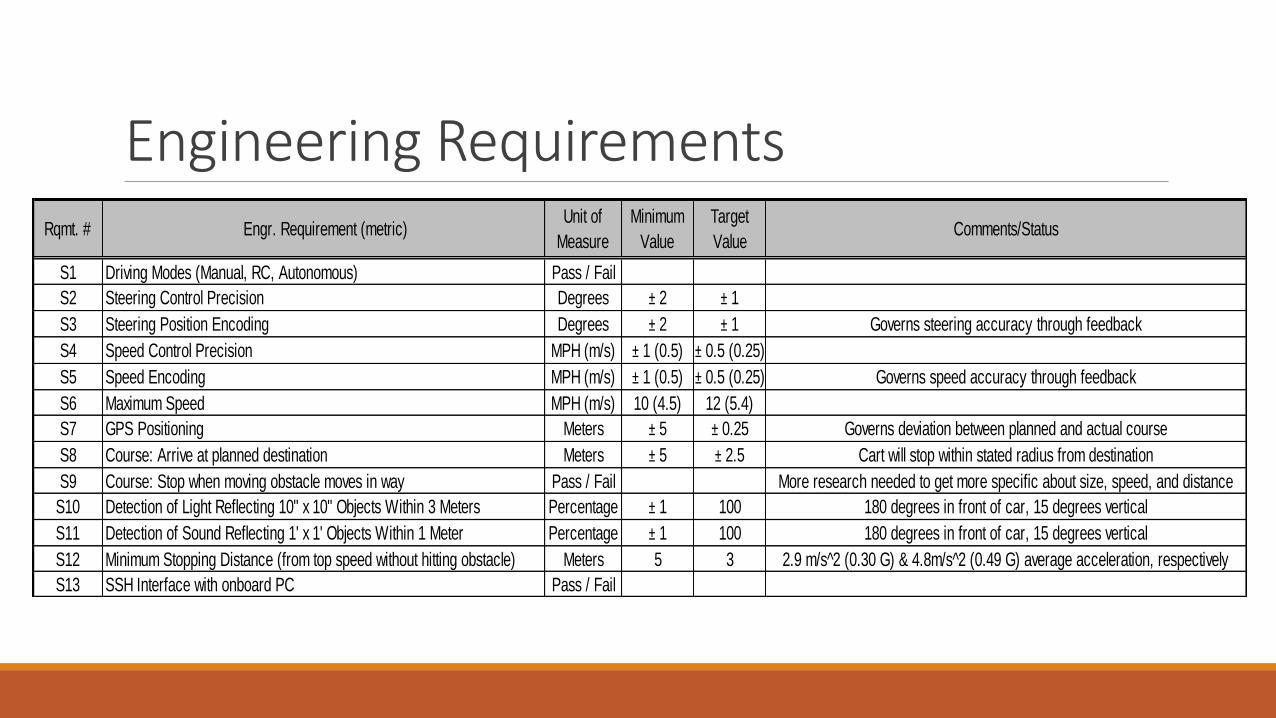
S1 Driving Modes (Manual, RC, Autonomous) Pass / Fail
S2 Steering Control Precision Degrees ± 2 ± 1
S3 Steering Position Encoding Degrees ± 2 ± 1 Governs steering accuracy through feedback
S4 Speed Control Precision MPH (m/s) ± 1 (0.5) ± 0.5 (0.25)
S5 Speed Encoding MPH (m/s) ± 1 (0.5) ± 0.5 (0.25) Governs speed accuracy through feedback
S6 Maximum Speed MPH (m/s) 10 (4.5) 12 (5.4)
S7 GPS Positioning Meters ± 5 ± 0.25 Governs deviation between planned and actual course
S8 Course: Arrive at planned destination Meters ± 5 ± 2.5 Cart will stop within stated radius from destination
S9 Course: Stop when moving obstacle moves in way Pass / Fail More research needed to get more specific about size, speed, and distance
S10 Detection of Light Reflecting 10" x 10" Objects Within 3 Meters Percentage ± 1 100 180 degrees in front of car, 15 degrees vertical
S11 Detection of Sound Reflecting 1' x 1' Objects Within 1 Meter Percentage ± 1 100 180 degrees in front of car, 15 degrees vertical
S12 Minimum Stopping Distance (from top speed without hitting obstacle) Meters 5 3 2.9 m/s^2 (0.30 G) & 4.8m/s^2 (0.49 G) average acceleration, respectively
S13 SSH Interface with onboard PC Pass / Fail
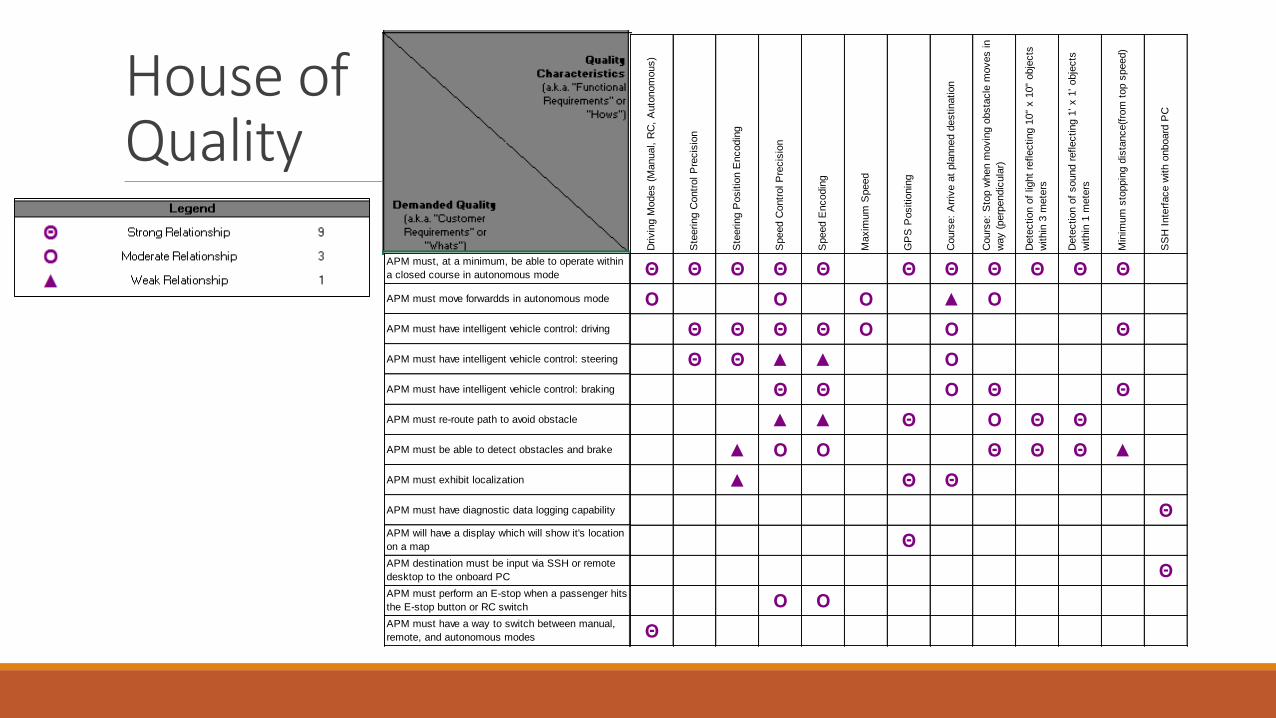
House of Quality
Θ Θ Θ Θ Θ Θ
Ste
ering C
ontr
ol P
recis
ion
Ste
ering P
ositio
n E
ncodin
g
Speed C
ontr
ol P
recis
ion
Speed E
ncodin
g
Maxim
um
Speed
Dete
ction o
f sound r
eflecting 1
' x 1
' obje
cts
within
1 m
ete
rs
Min
imum
sto
ppin
g d
ista
nce(f
rom
top s
peed)
SS
H I
nte
rface w
ith o
nboard
PC
Θ Θ Θ
GP
S P
ositio
nin
g
Cours
e:
Arr
ive a
t pla
nned d
estination
Cours
e:
Sto
p w
hen m
ovin
g o
bsta
cle
moves in
way (
perp
endic
ula
r)
Θ
Θ
Drivin
g M
odes (
Manual, R
C,
Auto
nom
ous)
Θ
Θ
Dete
ction o
f lig
ht
reflecting 1
0"
x 1
0"
obje
cts
within
3 m
ete
rs
Θ Ο
Ο▲ ▲
Ο
Θ
Θ
▲Ο Ο
Ο
Θ
Ο Ο
Θ Θ
▲
▲ ▲ Θ
Θ Θ Θ ▲Ο Ο
Θ
ΘΘ Θ
Ο Θ Θ
Θ▲
Θ
Θ
Θ
Θ
Ο Ο
APM must, at a minimum, be able to operate within
a closed course in autonomous mode
APM must have intelligent vehicle control: braking
APM must re-route path to avoid obstacle
APM must have intelligent vehicle control: steering
APM must move forwardds in autonomous mode
APM must have intelligent vehicle control: driving
APM must be able to detect obstacles and brake
APM must exhibit localization
APM must have diagnostic data logging capability
APM will have a display which will show it's location
on a map
APM destination must be input via SSH or remote
desktop to the onboard PC
APM must have a way to switch between manual,
remote, and autonomous modes
APM must perform an E-stop when a passenger hits
the E-stop button or RC switch
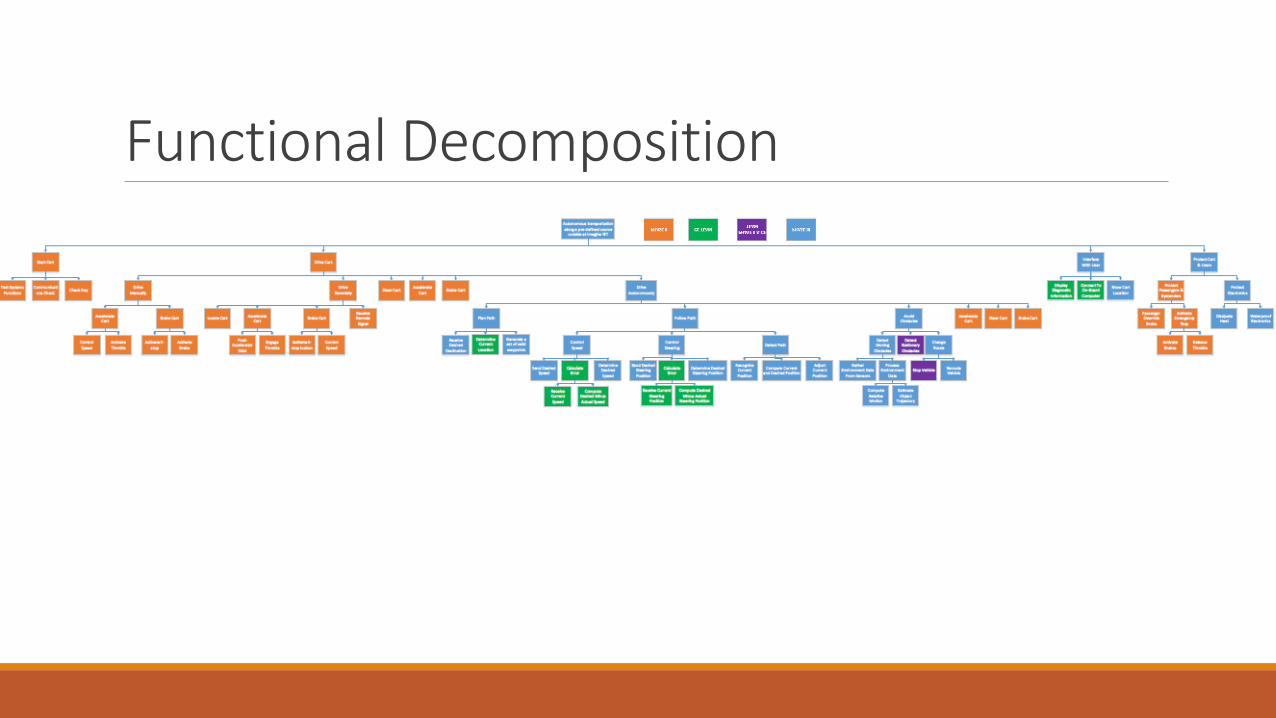
Functional Decomposition
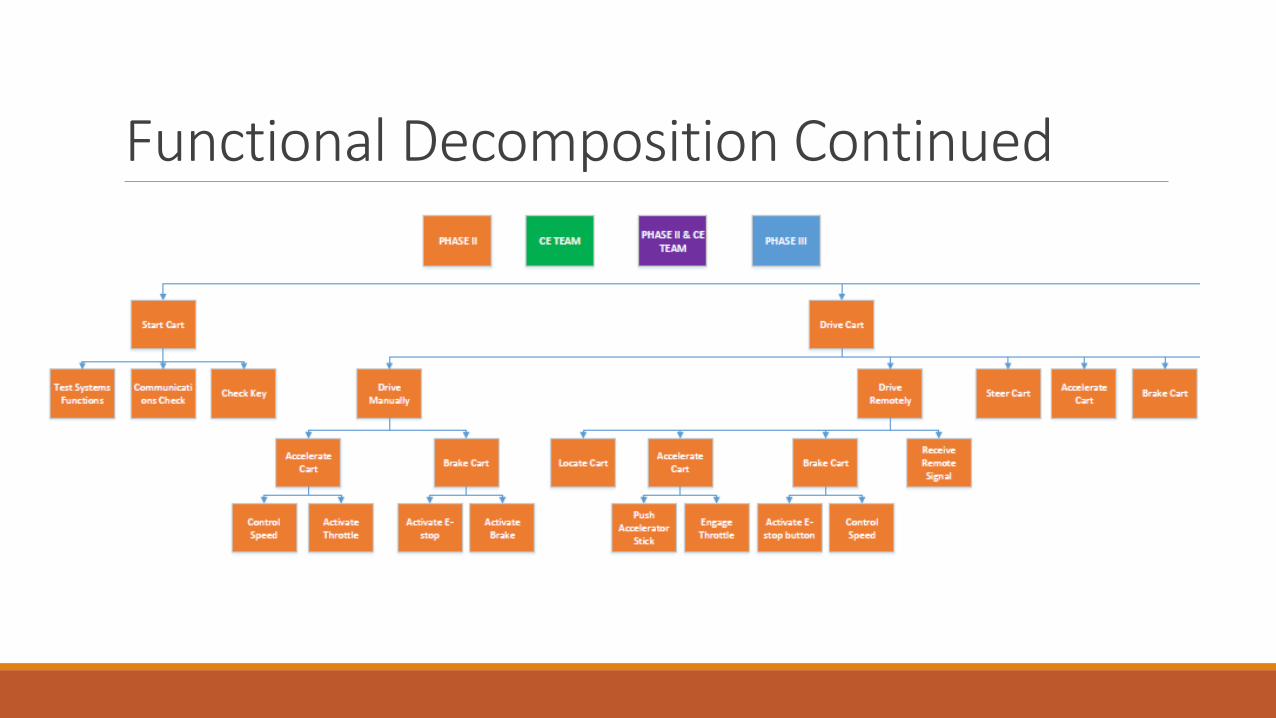
Functional Decomposition Continued
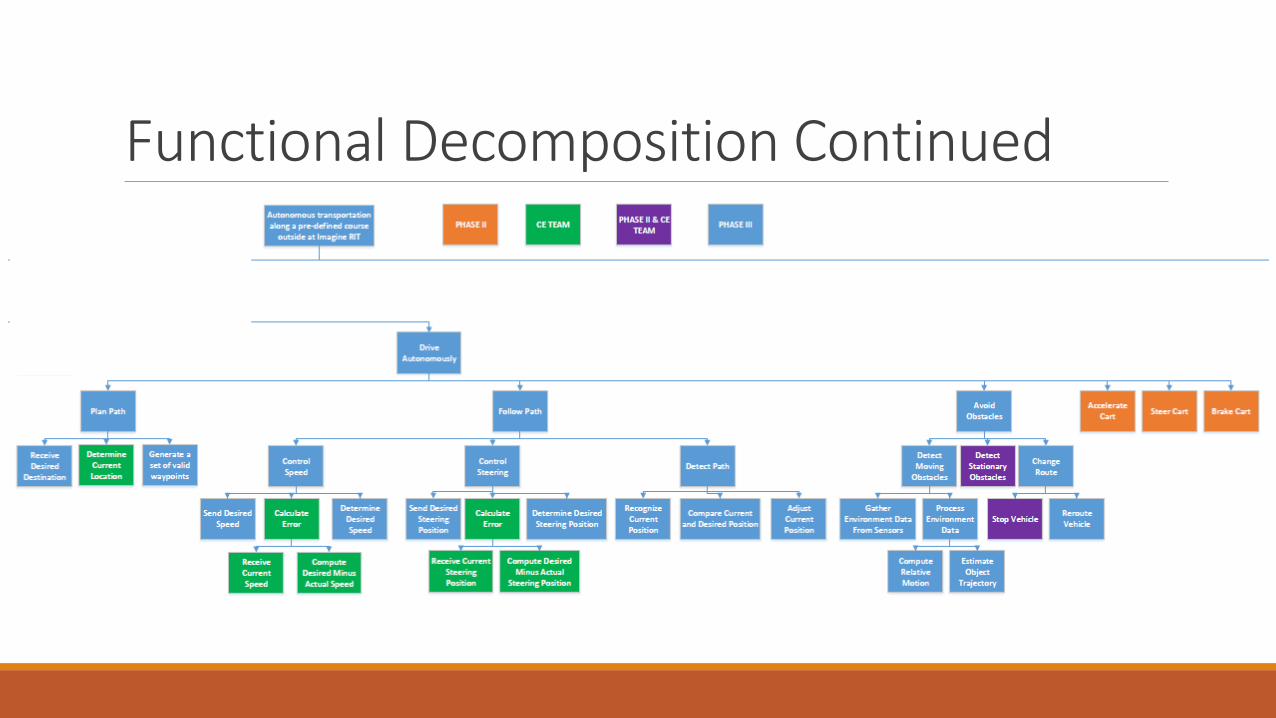
Functional Decomposition Continued

Functional Decomposition Continued

System Architecture - Physical
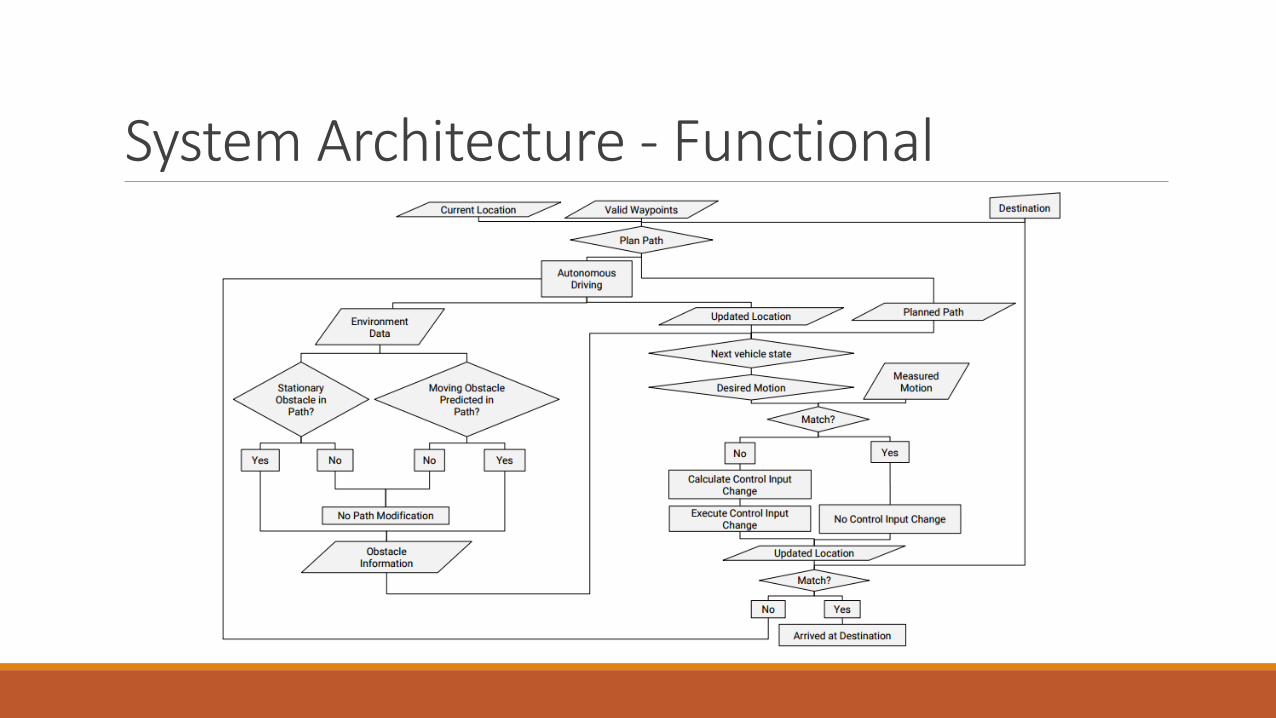
System Architecture - Functional
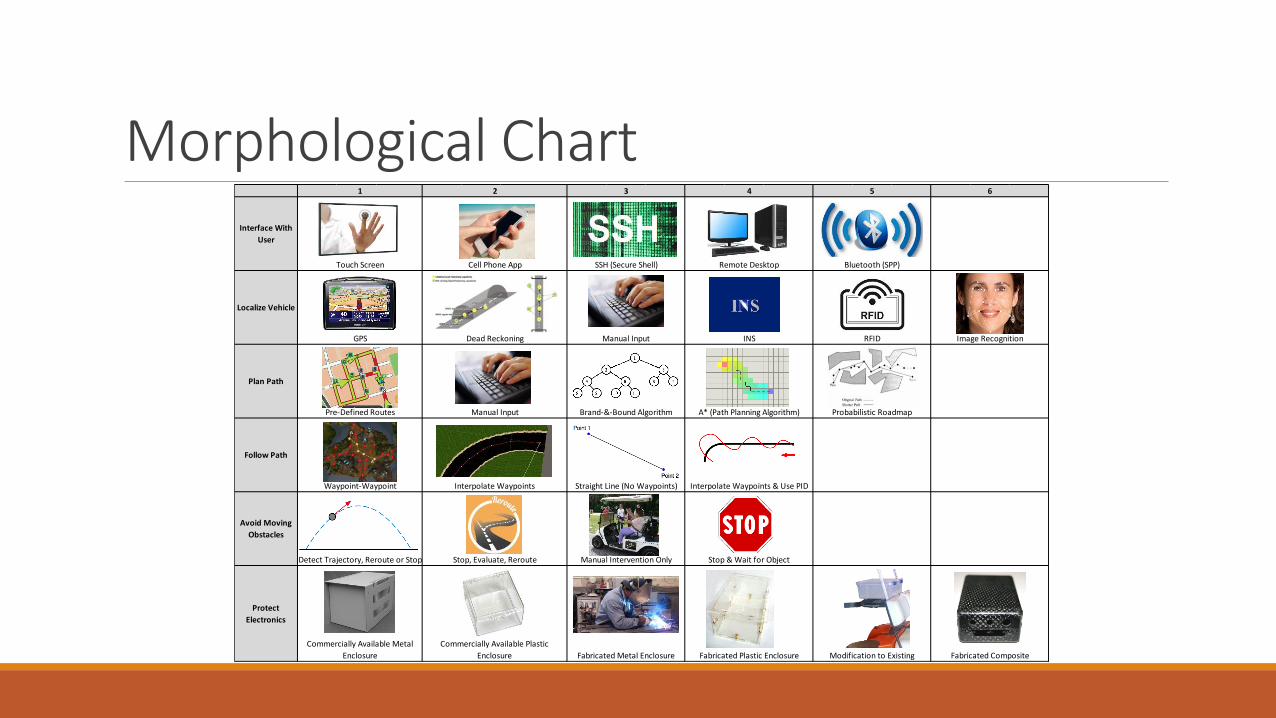
Morphological Chart
Image Recognition
Fabricated Composite
Bluetooth (SPP)
RFID
Probabilistic Roadmap
Modification to Existing
Remote Desktop
INS
A* (Path Planning Algorithm)
Interpolate Waypoints & Use PID
Stop & Wait for Object
Fabricated Plastic Enclosure
SSH (Secure Shell)
Manual Input
Brand-&-Bound Algorithm
Straight Line (No Waypoints)
Manual Intervention Only
Fabricated Metal Enclosure
Cell Phone App
Dead Reckoning
Manual Input
Interpolate Waypoints
Stop, Evaluate, Reroute
Commercially Available Plastic
Enclosure
Touch Screen
GPS
Pre-Defined Routes
Waypoint-Waypoint
Detect Trajectory, Reroute or Stop
Commercially Available Metal
Enclosure
Interface With
User
Localize Vehicle
Plan Path
Follow Path
Avoid Moving
Obstacles
Protect
Electronics
1 2 3 4 5 6
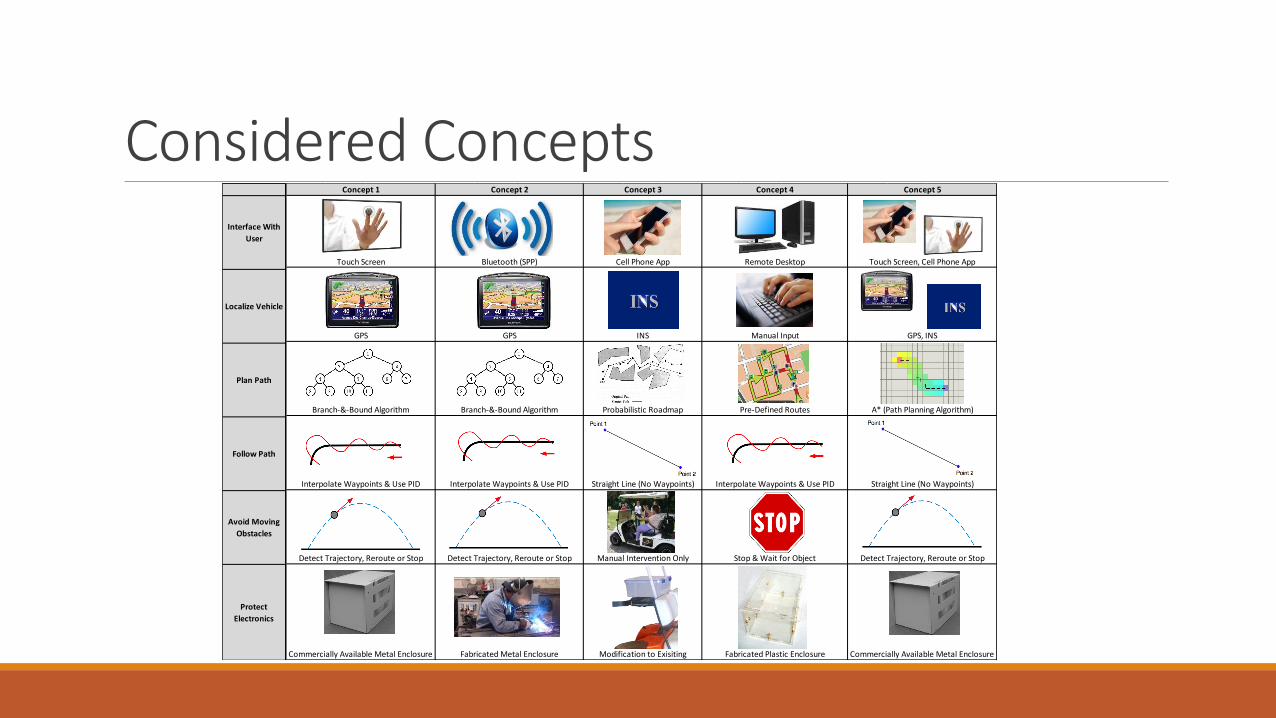
Considered Concepts
Image Recognition
Fabricated Composite
Bluetooth (SPP)
RFID
Probabilistic Roadmap
Modification to Existing
Remote Desktop
INS
A* (Path Planning Algorithm)
Interpolate Waypoints & Use PID
Stop & Wait for Object
Fabricated Plastic Enclosure
SSH (Secure Shell)
Manual Input
Brand-&-Bound Algorithm
Straight Line (No Waypoints)
Manual Intervention Only
Fabricated Metal Enclosure
Cell Phone App
Dead Reckoning
Manual Input
Interpolate Waypoints
Stop, Evaluate, Reroute
Commercially Available Plastic
Enclosure
Touch Screen
GPS
Pre-Defined Routes
Waypoint-Waypoint
Detect Trajectory, Reroute or Stop
Commercially Available Metal
Enclosure
Interface With
User
Localize Vehicle
Plan Path
Follow Path
Avoid Moving
Obstacles
Protect
Electronics
1 2 3 4 5 6
Commercially Available Metal Enclosure Fabricated Metal Enclosure Modification to Exisiting Fabricated Plastic Enclosure Commercially Available Metal Enclosure
Detect Trajectory, Reroute or Stop Detect Trajectory, Reroute or Stop Manual Intervention Only Stop & Wait for Object Detect Trajectory, Reroute or Stop
Interpolate Waypoints & Use PID Interpolate Waypoints & Use PID Straight Line (No Waypoints) Interpolate Waypoints & Use PID Straight Line (No Waypoints)
Branch-&-Bound Algorithm Branch-&-Bound Algorithm Probabilistic Roadmap Pre-Defined Routes A* (Path Planning Algorithm)
GPS GPS INS Manual Input GPS, INS
Touch Screen Bluetooth (SPP) Cell Phone App Remote Desktop Touch Screen, Cell Phone App
Concept 1 Concept 2 Concept 3 Concept 4 Concept 5

Pugh Analysis CriteriaCriteria Criteria Explanation
Effectiveness Concept's ideal capability of success
Feasibility
Concept's ability to be achieved with regards to resource risks and technical
challenges
Cost Effectiveness Concept's ability to be achieved within $500 budget
Safety Concept's safety to itself, passengers, and bystanders
Robustness Concept's repeatable performance in adverse conditions (overall durability)
Computational Efficiency Concept's use of computational resources is not wasteful
Passenger Experience
Concept's ability to provide an enjoyable experience for the passenger. Additionally,
it is easy to use and makes the passenger feel safe
Time to Build/Implement Concept's ability to be built within the two semesters given to build the project
Vehicle Performance
Concept's physical performance when operating including efficient travel and
smooth operation
Location Accuracy & Precision Concept's ability to locate itself accurately and precisely
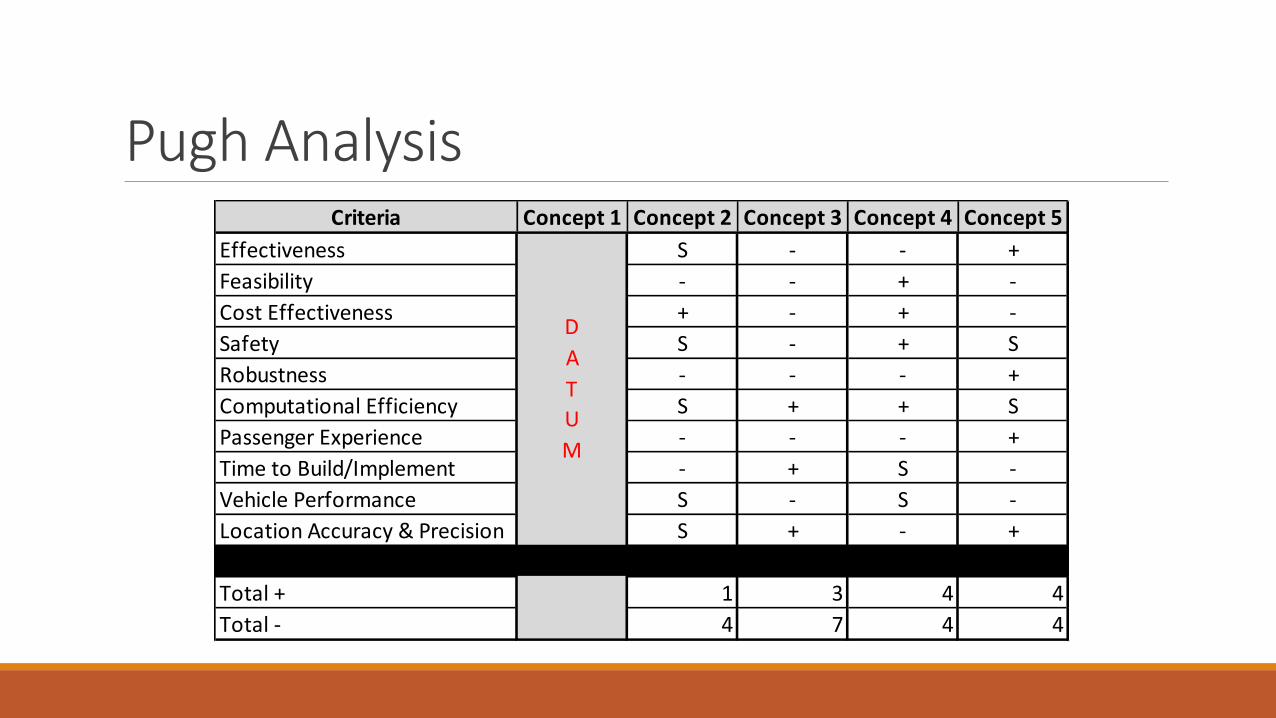
Pugh AnalysisCriteria Concept 1 Concept 2 Concept 3 Concept 4 Concept 5
Effectiveness S - - +
Feasibility - - + -
Cost Effectiveness + - + -
Safety S - + S
Robustness - - - +
Computational Efficiency S + + S
Passenger Experience - - - +
Time to Build/Implement - + S -
Vehicle Performance S - S -
Location Accuracy & Precision S + - +
Total + 1 3 4 4
Total - 4 7 4 4
D
A
T
U
M

Pugh AnalysisCriteria Concept 1 Concept 2 Concept 3 Concept 4 Concept 5
Effectiveness S - - +
Feasibility + - + -
Cost Effectiveness - - + -
Safety S - - S
Robustness + - S +
Computational Efficiency S S + -
Passenger Experience + - - +
Time to Build/Implement + - + -
Vehicle Performance S - - -
Location Accuracy & Precision S + - +
Total + 4 1 4 4
Total - 1 8 5 5
D
A
T
U
M
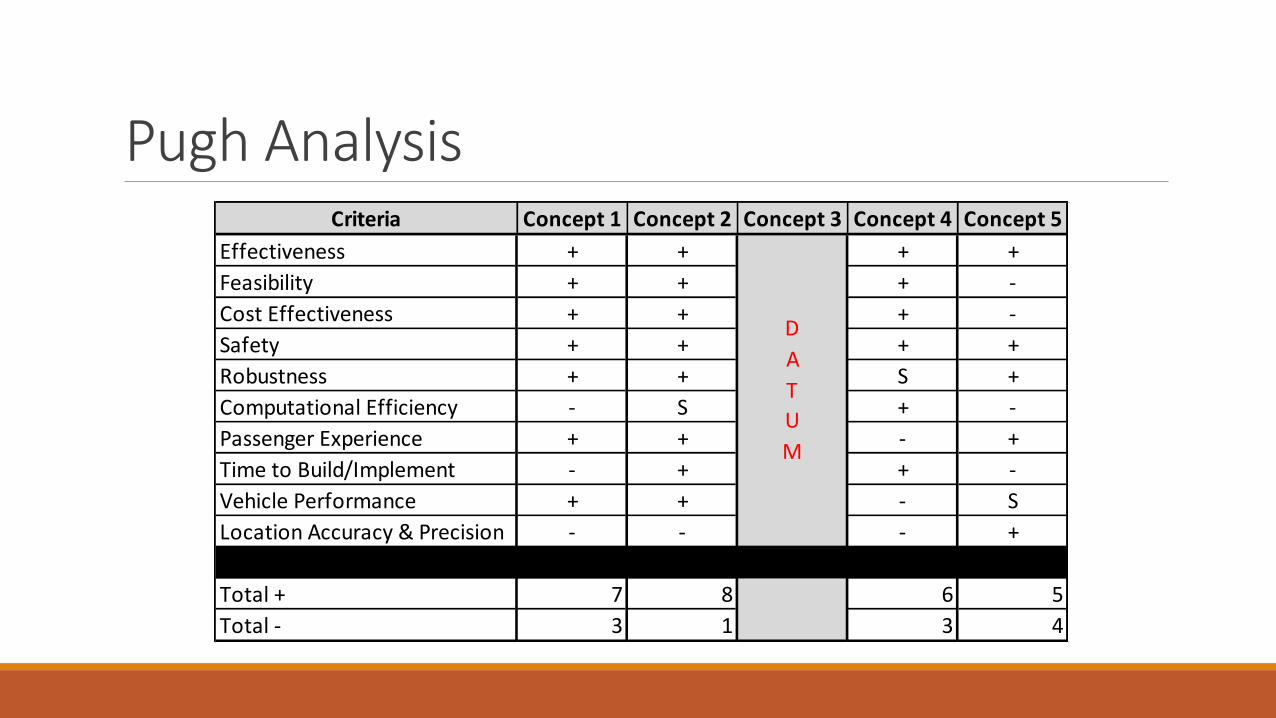
Pugh AnalysisCriteria Concept 1 Concept 2 Concept 3 Concept 4 Concept 5
Effectiveness + + + +
Feasibility + + + -
Cost Effectiveness + + + -
Safety + + + +
Robustness + + S +
Computational Efficiency - S + -
Passenger Experience + + - +
Time to Build/Implement - + + -
Vehicle Performance + + - S
Location Accuracy & Precision - - - +
Total + 7 8 6 5
Total - 3 1 3 4
D
A
T
U
M
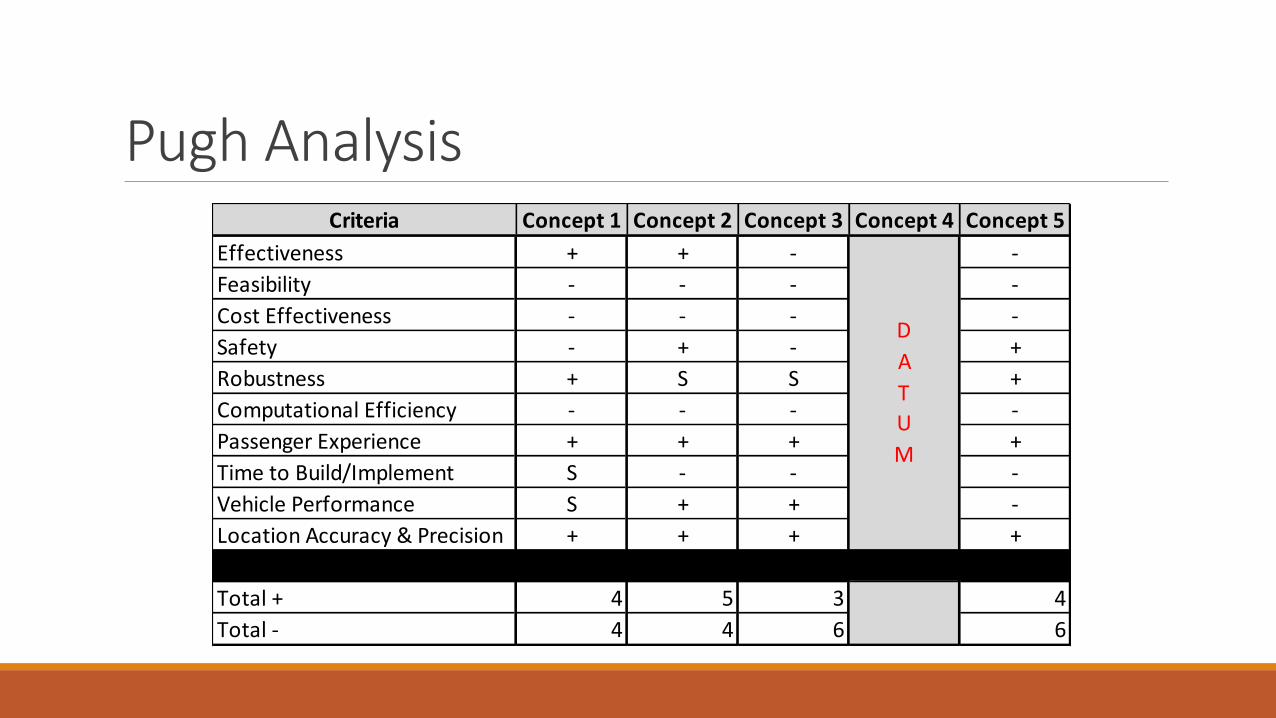
Pugh AnalysisCriteria Concept 1 Concept 2 Concept 3 Concept 4 Concept 5
Effectiveness + + - -
Feasibility - - - -
Cost Effectiveness - - - -
Safety - + - +
Robustness + S S +
Computational Efficiency - - - -
Passenger Experience + + + +
Time to Build/Implement S - - -
Vehicle Performance S + + -
Location Accuracy & Precision + + + +
Total + 4 5 3 4
Total - 4 4 6 6
D
A
T
U
M

Selected ConceptCriteria Concept 1 Concept 2 Concept 3 Concept 4 Concept 5
Effectiveness S - - +
Feasibility - - + -
Cost Effectiveness + - + -
Safety S - + S
Robustness - - - +
Computational Efficiency S + + S
Passenger Experience - - - +
Time to Build/Implement - + S -
Vehicle Performance S - S -
Location Accuracy & Precision S + - +
D
A
T
U
M
Protect
Electronics
Interface With
User
Localize Vehicle
Plan Path
Follow Path
Avoid Moving
Obstacles
Concept 1
Touch Screen
GPS
Branch-&-Bound Algorithm
Interpolate Waypoints & Use PID
Detect Trajectory, Reroute or Stop
Commercially Available Metal Enclosure

Benchmarking – GPS ModulesProduct EM-506 BU-353S4 NVS NV08C-CSM-BRD SparkFun Venus GPS Adafruit MTK3339 UBLOX LEA-6T
Price ($) $39.95 $34.59 $64.00 $49.95 $39.95 $149.99
Positional Accuracy (m) < 2.5 < 2.5 < 1.5 < 2.5 < 1.8 < 2.5
Speed Accuracy (m/s) 0.01 N/A 0.05 0.1 0.1 0.1
Heading Accuracy (degrees) 0.01 N/A 0.05 0.1 0.1 0.5
Reacquistion Time (s) 0.1 0.1 N/A 1 N/A N/A
Hot Start Time (s) 35 1 3 1 1 1
Cold Start Time (s) 35 35 25 29 34 26
Update Frequency (Hz) 1 / 5 1 1 / 2 / 5 / 10 1 / 2 / 4 / 5 / 8 / 10 / 20 42014 42009
Sensitivity (dBm) -163 -163 -143 -165 -165 -160
Input Voltage (Vdc) 4.5-6.5 4.5-5.5 3-3.6 2.7-3.3 3-4.3 4.75-5.25
Communication UART USB UART UART / I2C UART UART / USB / I2C
DGPS/RTK Compatible DGPS Input N/A DGPS / RTK N/A DGPS DGPS / RTK
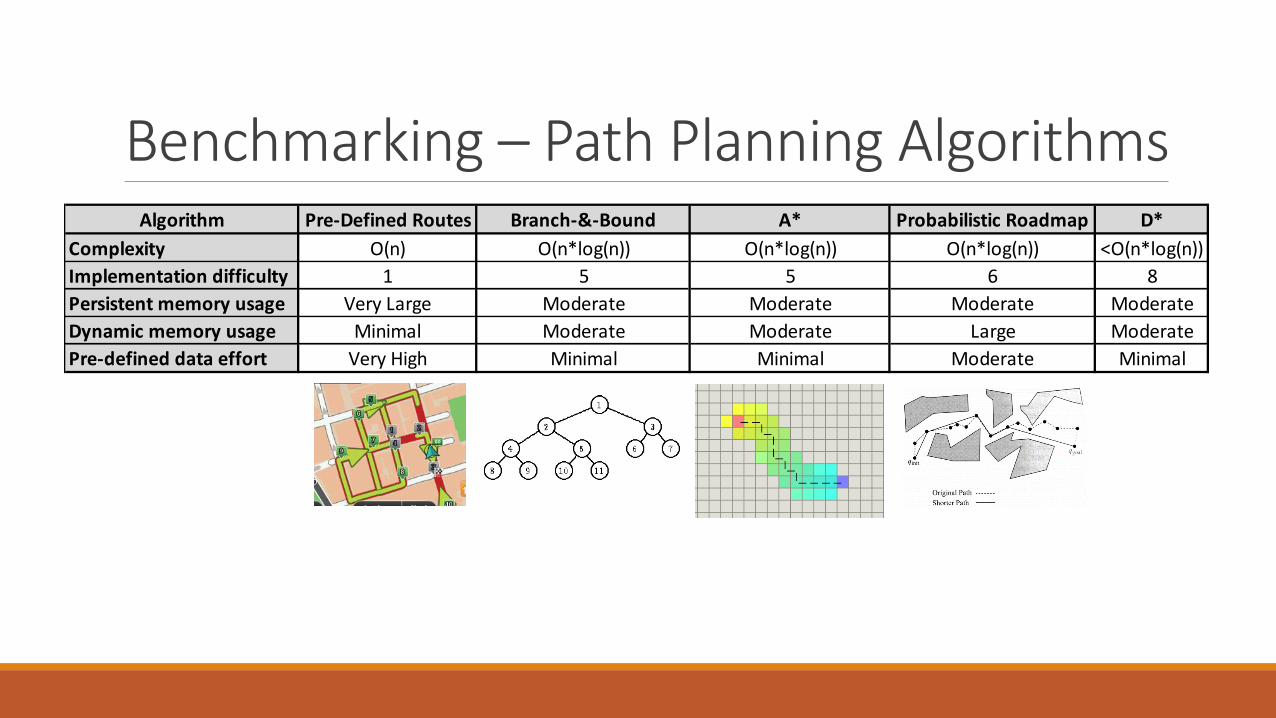
Benchmarking – Path Planning AlgorithmsAlgorithm Pre-Defined Routes Branch-&-Bound A* Probabilistic Roadmap D*
Complexity O(n) O(n*log(n)) O(n*log(n)) O(n*log(n)) <O(n*log(n))
Implementation difficulty 1 5 5 6 8
Persistent memory usage Very Large Moderate Moderate Moderate Moderate
Dynamic memory usage Minimal Moderate Moderate Large Moderate
Pre-defined data effort Very High Minimal Minimal Moderate Minimal
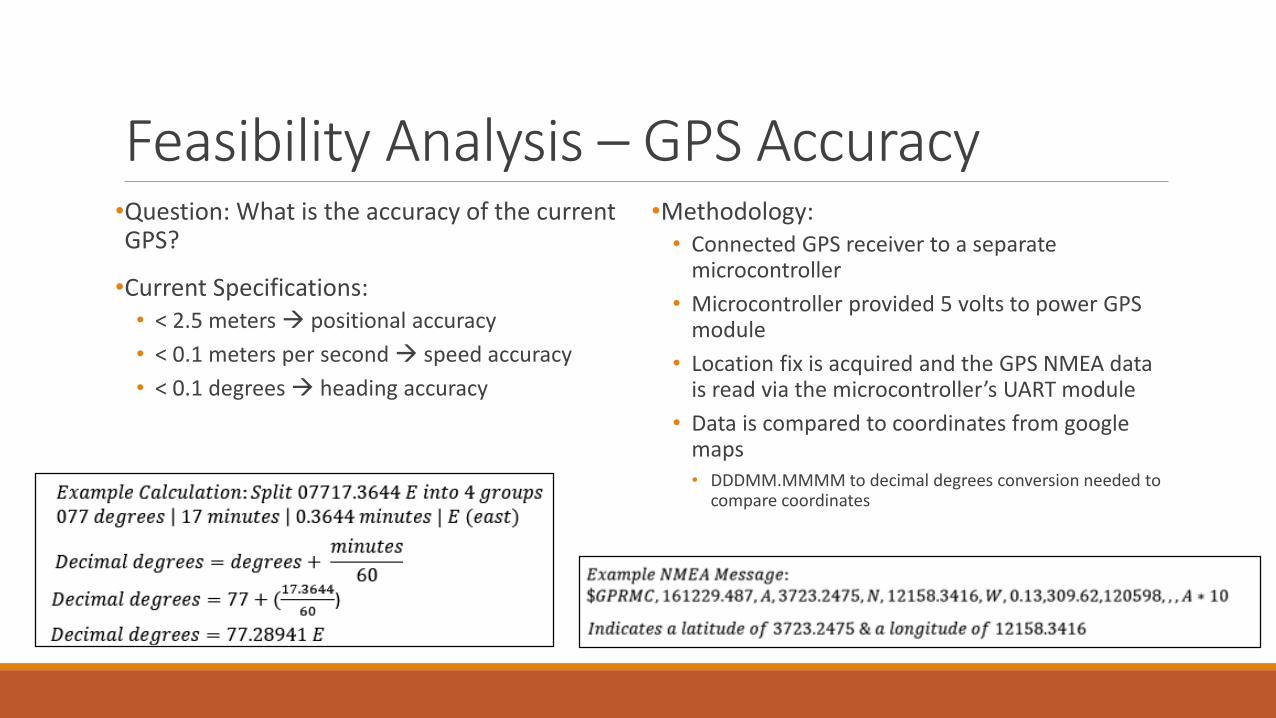
Feasibility Analysis – GPS Accuracy•Question: What is the accuracy of the current GPS?
•Current Specifications:• < 2.5 meters positional accuracy
• < 0.1 meters per second speed accuracy
• < 0.1 degrees heading accuracy
•Methodology:• Connected GPS receiver to a separate
microcontroller
• Microcontroller provided 5 volts to power GPS module
• Location fix is acquired and the GPS NMEA data is read via the microcontroller’s UART module
• Data is compared to coordinates from google maps• DDDMM.MMMM to decimal degrees conversion needed to
compare coordinates
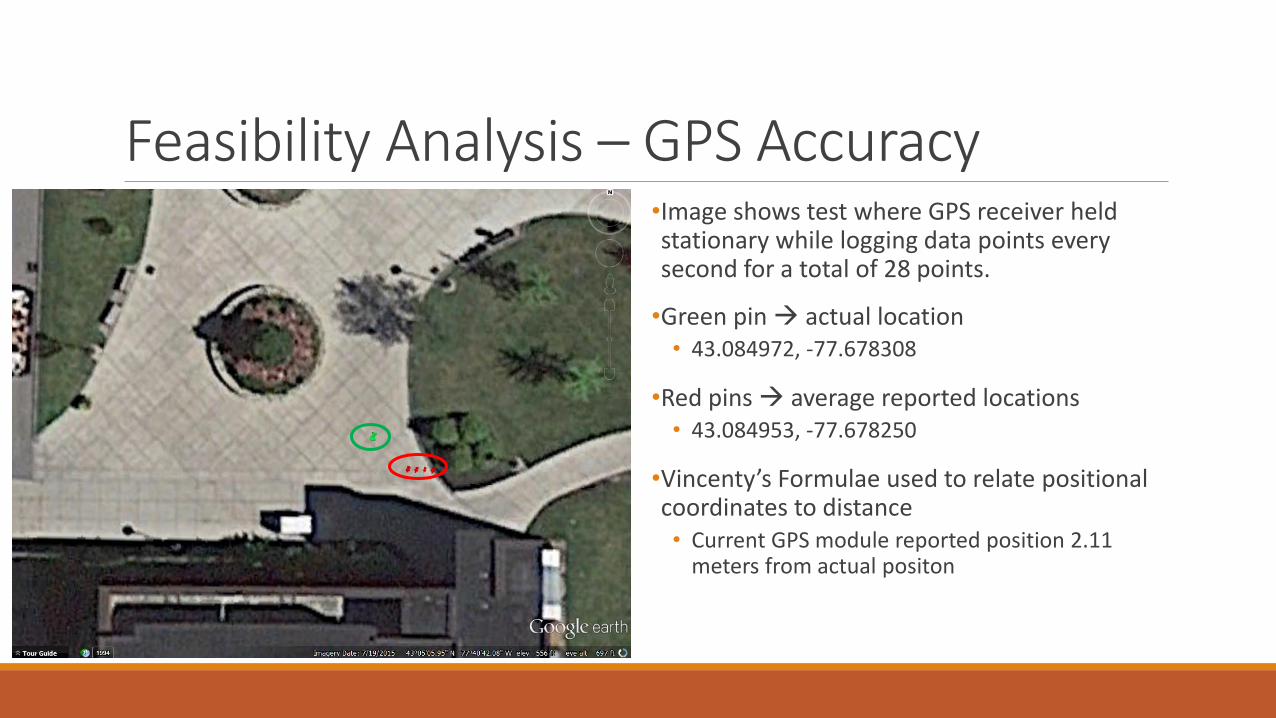
Feasibility Analysis – GPS Accuracy•Image shows test where GPS receiver held stationary while logging data points every second for a total of 28 points.
•Green pin actual location• 43.084972, -77.678308
•Red pins average reported locations• 43.084953, -77.678250
•Vincenty’s Formulae used to relate positional coordinates to distance• Current GPS module reported position 2.11
meters from actual positon
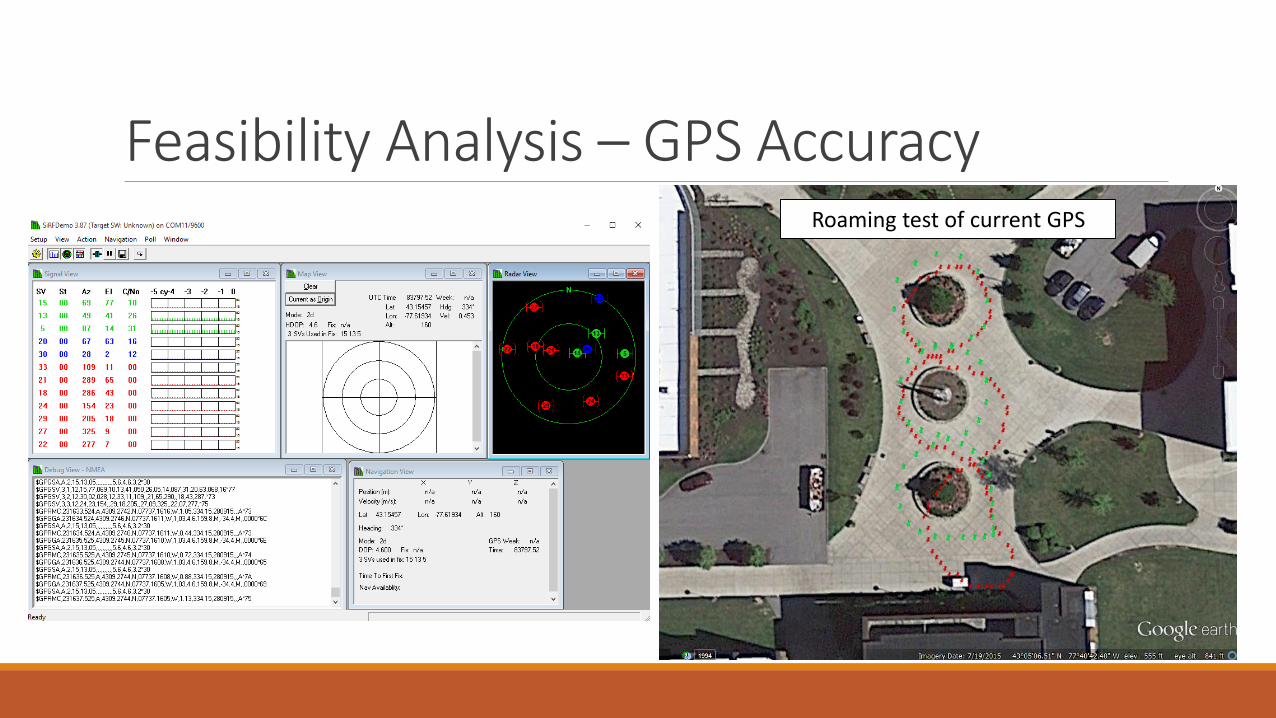
Feasibility Analysis – GPS AccuracyRoaming test of current GPS

Risk AssessmentCategory Risk Item Effect Cause L
ikeli
hood
Severit
y
Imp
orta
nce
What type of
risk is this?Describe the risk briefly What is the effect on any or all of the project deliverables if the cause actually happens? What are the possible cause(s) of this risk? L S L*S
Not enough bandwidth to send all sensor information Vehicle not able to react quick enough Design error 1 3 3
Control code error Vehicle operates improperly Design error 1 9 9
Not high enough resolution from sensors Vehicle not able to react quick enough, or detect objects properly Design error 1 3 3
Unable to determine current location Vehicle not able to reach final destination GPS sensor failure, weak signal 3 1 3
Sensor failure Object detection not possible Electrical failure 1 9 9
Sensor false reading Object detection not possible Coding error, electrical failure 3 9 27
Mechanical failure Loss of control Fatigue, vibration 1 9 9
Electrical failure Loss of detection and control Water intrusion in enclosure, disconnected wires 1 9 9
Power loss Loss of control in all modes Loose Connection, electrical shorts 1 9 9
Integration trouble with steering and obstacle avoidance Vehicle could possible hit objects Coding error, design error 1 3 3
LiDAR does not integrate well with other systems Developments tasks become difficult Phase 2 ROSS LiDAR integration not sucessful 1 1 1
PCB shorts out Damaged equipment; Loss of functionality Failure to weatherproof. Loose connections 1 9 9
Touch screen loses input User not able to give destination input to vehicle Wiring issue, major computer fault, touchscreen faulty 1 3 3
Touch screen stops displaying information User not able to see vehicle status Wiring issue, major computer fault 1 3 3
GPS getting incorrect signal Vehicle won't know location so it won't be able to plan route Inside building, cloudy day, interference in signal 1 9 9
Erradict object can't be identified Vehicle is uncertain what to do, hits bystander An object can't be identified, an object moves in an unpredictable way 1 9 9
Control electronics overheat Vehicle loses control Cooling system fails 3 9 27
Not enough waypoints to reach user destination Vehicle can't reach destination because it doesn't know how to get there Programing error 3 1 3
Need to buy additional sensors for all automation tasks object detection set back, put us over budget Our team realizes current sensors can't get all the data we need 3 1 3
Phase 2 does not meet all of their requirements Our scope could change, we might not be able to complete all tasks Phase I not completing their tasks, parts come in late 3 9 27
Space for testing on campus is not available Stall development process Space is already reserved. It is a safety concern. 3 3 9
Not having enough time to learn from Phase II Scope changes, might not be able to finish everything that we origionally planned Phase III not having enough time to meet with Phase II, conflictingn schedules, Phase II not having time to meet with us 3 3 9
Team loses a CE/programmer Localization, path planning, object detection not possible CE doesn't return for SDII 1 9 9
Team does not have enough budget to purchase a new GPS Localization not accurate Small budget, other high priority items are expensive 1 3 3
Enclosure costs more than budget Electronics could overheat or get wet Small budget, other high priority items are expensive 3 3 9
Driving the APM in bad weather Vehicle spins out, passenger gets frostbite Wheels aren't appropriate for weather, no wind shield for passengers 9 3 27
Object detection failure APM hits object damaging itself or injuring a passenger/bystander Bug in software code. Sensor malfunction. 3 9 27
E-stop failure APM doesn't brake, APM hits object design error, contacts on button fail, wires unattached 3 9 27
APM makes turn going to fast and passenger falls out Project cancelled, people injured, no one wants to use APM Speed isn't limited, design error 1 9 9
Team member gets injured working with APM Project gets cancelled, people injured, RIT sued Not taking precautionary measures when working, errors in design cause injury 1 9 9
Algorithm fails and APM hits bystander Project gets cancelled, people injured, RIT sued Design error, coding error 3 9 27
Passenger feels unsafe No one wants to use APM APM drives erradically 3 3 9
Pedestrians feel unsafe Petition to ban APM APM drives erradically 1 1 1
APM catches fire and starts more things on fire Completely destroy APM, injury Cart overheats near flammable objects, a person sets it on fire 1 9 9
User doesn't know how to use User Interface Vehicle won't function in the way the passenger wants it to User Interference is not easy to use, inexperienced user 1 3 3
Societal
Technical
Resource
Safety
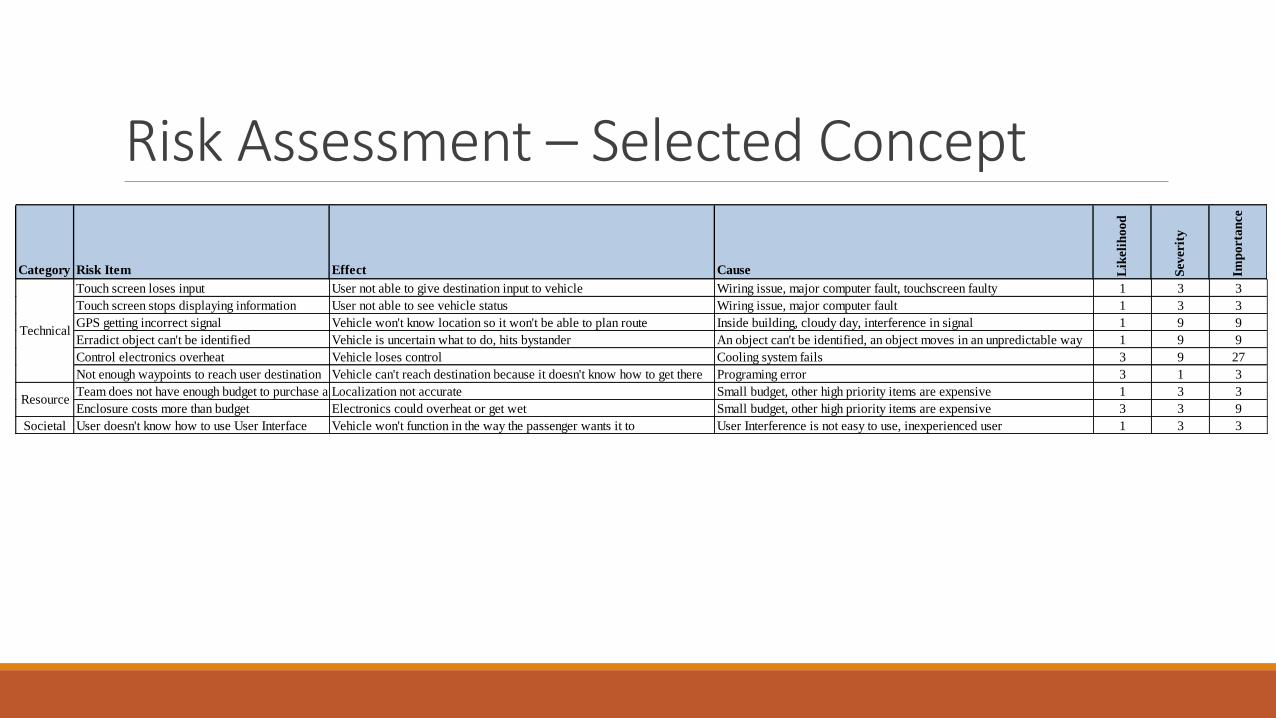
Risk Assessment – Selected Concept
Category Risk Item Effect Cause Lik
eli
ho
od
Sev
erit
y
Imp
orta
nce
Touch screen loses input User not able to give destination input to vehicle Wiring issue, major computer fault, touchscreen faulty 1 3 3
Touch screen stops displaying information User not able to see vehicle status Wiring issue, major computer fault 1 3 3
GPS getting incorrect signal Vehicle won't know location so it won't be able to plan route Inside building, cloudy day, interference in signal 1 9 9
Erradict object can't be identified Vehicle is uncertain what to do, hits bystander An object can't be identified, an object moves in an unpredictable way 1 9 9
Control electronics overheat Vehicle loses control Cooling system fails 3 9 27
Not enough waypoints to reach user destination Vehicle can't reach destination because it doesn't know how to get there Programing error 3 1 3
Team does not have enough budget to purchase a new GPSLocalization not accurate Small budget, other high priority items are expensive 1 3 3
Enclosure costs more than budget Electronics could overheat or get wet Small budget, other high priority items are expensive 3 3 9
Societal User doesn't know how to use User Interface Vehicle won't function in the way the passenger wants it to User Interference is not easy to use, inexperienced user 1 3 3
Technical
Resource
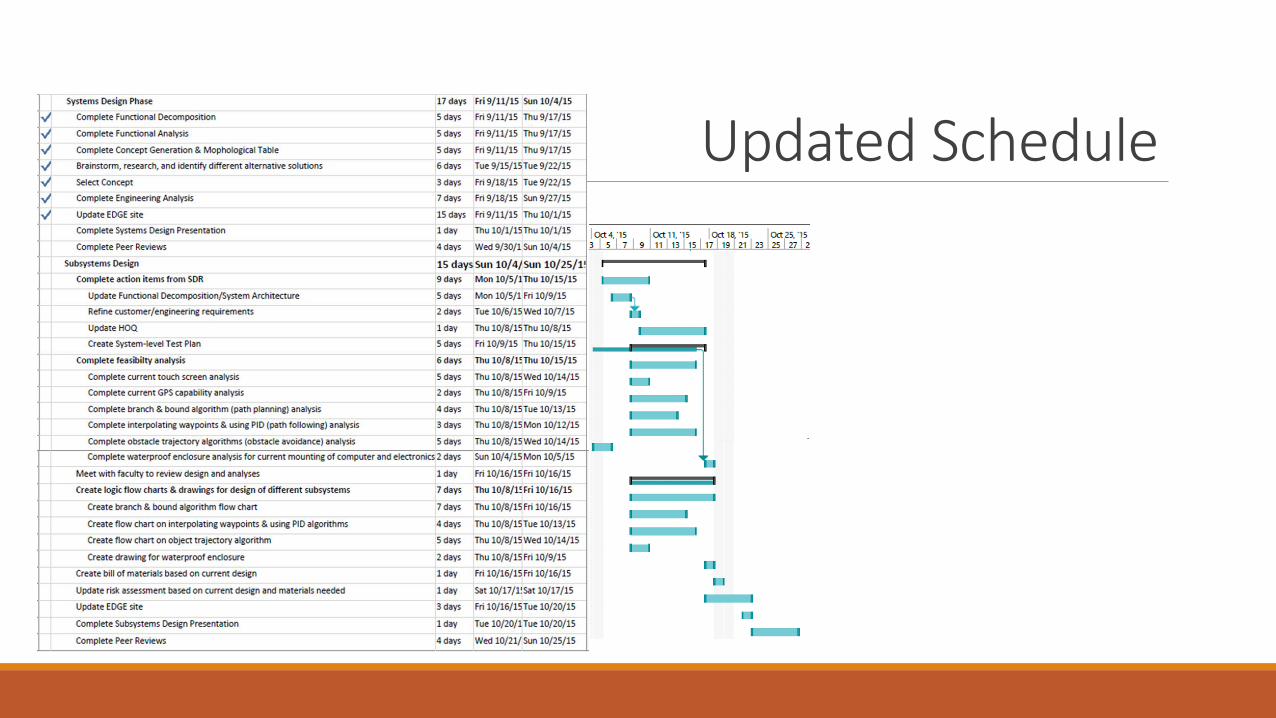
Updated Schedule

Questions & Feedback