table of contents - icnr2018.org · nobel laureates (and five popes). the pisa university system...
TRANSCRIPT

4th
International Conference on Neurorehabilitation
About ICNR…………………………………………………………………………………………………………........1
Letter from the ICNR Conference Chairs……………………………………………………………….…...………....2
Program at a glance………………………………………………………………………………………………...….…3
General conference information……………………………………………………………………….………………...4
Floor plans…………………………………………………………………………………………………………….……7
Conference committees………………………………………………………………………………………………….8
Special events and meetings……………………………………………………………………………………….....11
Conference excursion…………………………………………………………………………………………………12
Pre-conference workshops – oct ?……………………………………………………………………………..……..14
ICNR 2018 program – oct 16-19……………………………………………………………………………………...24
Plenary lectures………………………………………………………………………………………………………...37
Awards…………………………………………………………………………………………………………………...42
Poster session……………………………………………………………………………………………………………43
Exhibitor plan……………………………………………………………………………………………………………48
It is our pleasure to invite you to the 4th International Conference on NeuroRehabilitation
(ICNR2018) that will take place in Pisa (Italy) from October 16 to 20.
Restoring human sensory, motor and cognitive functions has been a fascinating research
area during the last century. Interfacing the human nervous system with electronic and mechatronic
systems to restore or compensate the neural function of patients is facing its crucial passage
between research and actual clinical reality.
The 2018 International Conference on Neurorehabilitation will bring together researchers
and students from the fields of Clinical Rehabilitation, Applied Neurophysiology, and Biomedical
Engineering to promote, feed and encourage this therapeutic global shift. Moreover, the conference
will be held in parallel with the International Symposium on Wearable Robotics (WeRob2018),
which will bring together researchers and innovators from all around the world to discuss novel
approaches, challenges and potential solutions in technologies for wearable robots, especially in the
clinical field.
TABLE OF CONTENTS
ABOUT ICNR

4th
International Conference on Neurorehabilitation
LETTER FROM THE ICNR CONFERENCE CHAIRS
PROGRAM AT A GLANCE

4th
International Conference on Neurorehabilitation
GENERAL CONFERENCE INFORMATION

4th
International Conference on Neurorehabilitation
ICNR2018 will be held at Il Palazzo dei Congressi di Pisa.
Pisa is a city in the Tuscany region of Central Italy straddling the Arno just before it empties into
the Ligurian Sea. It is the capital city of the Province of Pisa. Although Pisa is known worldwide
for its leaning (the bell tower of the city's cathedral), the city of over 91,104 residents (around
200,000 with the metropolitan area) contains more than 20 other historic churches, several medieval
palaces and various bridges across the Arno.
Pisa was the birthplace of Galileo Galilei (1564-1642), the father of modern science, who was also
professor of "Philosophia Naturalis" at Pisa University, founded in 1343 and alma mater of three
Nobel laureates (and five popes). The Pisa University system includes also the Scuola Normale
Superiore and the Scuola Superiore Sant'Anna (local organizer of the congress), which are reliably
at the top of their categories in international university rankings.

4th
International Conference on Neurorehabilitation

4th
International Conference on Neurorehabilitation
Getting there:
- By Train: Palazzo dei Congressi is 1,4 km from the Central Station of Pisa. It’s easily
reachable on foot in 15 min or by bus (Linea LAM ROSSA) until Matteotti 2 (or 4) bus
stop.
- By Plane: From the Airport (Aeroporto Internazionale di Pisa) you can reach the Central
Station in 10-15 min taking the Pisa-Mover (http://pisa-mover.com/), a fast train that links
the station with the airport. From the Central Station you can reach easily Palazzo dei
Congressi
on foot in 15 min or by bus (Linea LAM ROSSA) until Matteotti 2 (or 4) bus stop.
4th
International Conference on Neurorehabilitation
Accommodations:
FIVE STARS Hotels
Allegroitalia Pisa Tower http://towerplaza.allegroitalia.it/
Residence San Rossore https://www.residencesanrossore.it/home-eng
FOUR STARS Hotels
Hotel Repubblica Marinara http://www.repubblicahotelmarinarapisa.com
Hotel San Ranieri https://www.sanranierihotel.com/en/
Hotel Bologna http://hotelbologna.pisa.it/
Hotel AC Pisa https://www.marriott.it/hotels/travel/psaps-ac-hotel-pisa/
Hotel NH Pisa http://nh.hotels-pisa.com/it/
Grand Hotel Duomo http://www.grandhotelduomo.it/
Grand Hotel Bonanno http://www.grandhotelbonanno.it.directlybook.net/
THREE STARS Hotels
Hotel Di Stefano http://www.hoteldistefanopisa.com
Hotel Pisa Tower https://www.hotelpisatower.com
Hotel Minerva https://www.hotelminervapisa.it/
Hotel Roma http://www.hotelroma.pisa.it/
TWO STARS Hotels
Hotel Moderno https://www.hotelmoderno.pisa.it/
Hotel Amalfitana (website in Italian) http://www.hotelamalfitana.it/
Registration fees
Early Rate
(until July 15)
Regular Rate
(after July 15)
Conference Registration
General 550 € 750 €
Student 300 € 450 €
Single day general 300 € 450 €
Single day student 200 € 300 €
General +
Workshops 650 € 850 €
Students + 375 € 525 €

4th
International Conference on Neurorehabilitation
Workshops
Workshop Registration
General Registration
It includes participation to the Pre-conference Workshops (Tuesday 16) 175 €
Student Registration
It includes participation to the Pre-conference Workshops (Tuesday 16) 150 €
What does my Conference Registration include?
Max. nº
submissions
Oral &
Poster
sessions
Conference
material
Coffee
breaks
17-19
Oct
Daily
Lunch
17-19
Oct
Welcome
cocktail
16 Oct
Conference
banquet
18 Oct
Pre-
conference
Workshops
Conf. Registration
General 2
Student 1
General +
Workshops 2
Student +
Workshops 1
Additional tickets:
Name Badges:
Registration and Information Desk Hours

4th
International Conference on Neurorehabilitation
Internet Services
ICNR2016 is providing internet access as part of the 2018 conference registration. The wireless
code for the duration of the conference is
Network name:
Password:
If you require assistance, please visit the registration desk.

4th
International Conference on Neurorehabilitation
Room auditorium
Room a and b
FLOOR PLANS

4th
International Conference on Neurorehabilitation
Room Galilei
Room Fermi
4th
International Conference on Neurorehabilitation
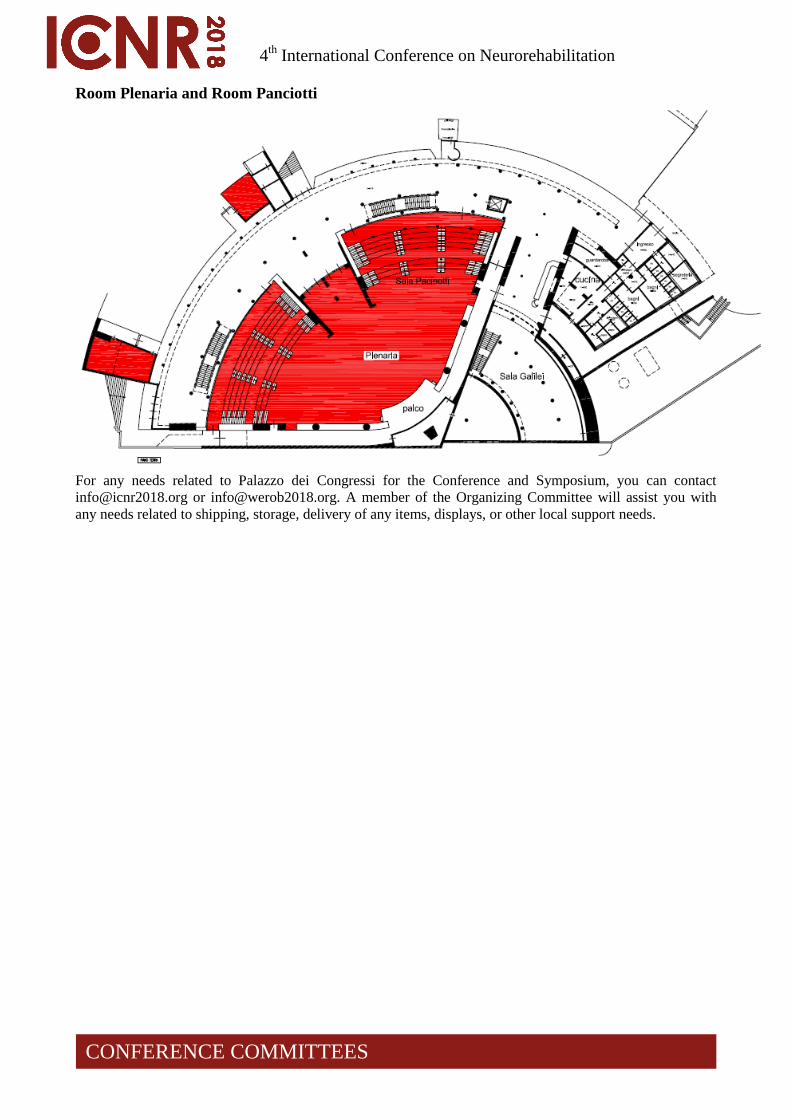
Room Plenaria and Room Panciotti
For any needs related to Palazzo dei Congressi for the Conference and Symposium, you can contact
[email protected] or [email protected]. A member of the Organizing Committee will assist you with
any needs related to shipping, storage, delivery of any items, displays, or other local support needs.
CONFERENCE COMMITTEES

4th
International Conference on Neurorehabilitation
International Steering Committee
Prof. Silvestro Micera, Chair, Scuola Superiore Sant’Anna, Italy
Prof. Jose L. Pons, Chair, Cajal Institute, CSIC, Spain
Prof. Metin Akay, University of Houston, USA
Prof. Dario Farina, Imperial College London, UK
Prof. Jose Carmena, Berkeley EECS, USA
Prof. Winnie Jansen, Aalborg University, Denmark
Prof. Ole Kæseler Andersen, Aalborg University, Denmark
Dr. Marco Molinari, Fondazione Santa Lucia, Italy
Local Organizing Committee
Program Chair: Prof. Lorenzo Masia, University of Twente
Program Co-Chairs: Prof. Zollo Loredana, Dr. Stefano Mazzoleni, Dr. Diego Torricelli, Dr.
Marco Controzzi
Finance Chair: Dr. Calogero Oddo, Scuola Superiore Sant’Anna
Finance Co-Chair: Dr. Diego Torricelli, Cajal Institute, CSIC
Exhibition Chair: Dr. Simona Crea, Scuola Superiore Sant’Anna
Workshop & Special session chair: Dr. Marco Controzzi, The BioRobotics Institute, Scuola
Superiore Sant’Anna, Italy
Publication & Social Media Chair: Dr. Alberto Mazzoni, Scuola Superiore Sant’Anna
Publication & Social Media Co-Chair: Ms. Pilar Raya, Cajal Institute, CSIC
SPECIAL EVENTS & MEETINGS

4th
International Conference on Neurorehabilitation
Opening Reception
Where? Palazzo dei Congressi
(Via Matteotti, 1. 56124 Pisa)
When? Tuesday 16 at 6.30pm
Conference Banquet Where? Officine Garibaldi
(Via Vincenzo Gioberti, 39, 56124 Pisa)
When? Thursday 18 at 8pm

4th
International Conference on Neurorehabilitation
When? Wednesday 17 at 5pm
CONFERENCE EXCURSIONS

4th
International Conference on Neurorehabilitation
For updated information about the workshops, including the final program, please visit regularly
the website.
WS1. BCIs for stroke rehabilitation and for assessment in disorders of consciousness
Organizers: Begonya Otal, Clinical R&D | Technical Sales Management
WS2. Worldwide consensus of NeuroRehabilitation
Organizers: Shingo Shimoda, Juna Moreno, Fady Alnajjar , Hitoshi Hirata, Jose-Luis Pons
WS3. State of the art and recent advances in HD-sEMG: prospects in neurorehabilitation
Organizer: Marco Gazzoni, Department of Electronics and Telecommunications, Politecnico di
Torino, Corso Duca degli Abruzzi 24, Torino, Italy.
WS4. Advances and Challenges on the Development, Testing and Assessment of Myo-Control
for Prostheses and Assistive/Rehabilitation Robots Organizers: Michele Barsotti, Domenico Buongiorno, Andrea D’Avella, Antonio Frisoli
WS5. Artificial Supernumerary Limbs for Clinical Neuroscience Organizers: Domenico Prattichizzo, Gionata Salvietti
WS6. The RONDA project: a robotic gym for stroke rehabilitation Organizers: Silvestro Micera, Guido Giudetti
WORKSHOPS – OCT 16

4th
International Conference on Neurorehabilitation
ICNR- WS1. BCIs for stroke rehabilitation and for assessment in disorders of consciousness
– Room Auditorium
Organizer Begonya Otal, Clinical R&D | Technical Sales Management
Authors Title
ICNR 2018 PROGRAM

4th
International Conference on Neurorehabilitation
Alexander Heilinger Introduction to major methodological approaches of BCI for stroke
rehabilitation, coma assessment and communication – 20 minutes
Strategies to run motor recovery training with BCI systems – 20 minutes
Cognitive assessment with BCI technology of DOC and locked-in
patients – 20 minutes
Practical session with a live demonstration of stroke rehabilitation
system using BCI technology – recoveriX – 45 minutes
Practical session with a live demonstration of an assessment system for
DOC patients using BCI technology – mindBEAGLE – 45 minutes
ICNR- WS2 - Worldwide consensus of NeuroRehabilitation – Room Auditorium
Organizers Shingo Shimoda, Juna Moreno, Fady Alnajjar , Hitoshi Hirata, Jose-
Luis Pons
Authors Title
Hitoshi Hirata Opening Remarks
Marco Molinari EU attitude of Neurorehabilitation from Medical viewpoint
Juan Moreno EU attitude of Neurorehabilitation from Engineering viewpoint

4th
International Conference on Neurorehabilitation
William Z Rymer US Clinical Experience with Wearable Exoskeletons as Therapeutic
Rehabilitation Devices Following Injury to the CNS: An Evolving Story
TBD US attitude of Neurorehabilitation from Engineering viewpoint
Ichiro Miyai Asian attitude of Neurorehabilitation from Medical viewpoint
Shingo Shimoda Role of engineering technieque for neurorehabilitation
Fady Alnajjar Middle East attitude of Neurorehabilitation from Engineering viewpoint
Panel discussion Chair: Prof. Hitoshi Hirata NeuroRehabilitation Consensus for
worldwide collaboration
ICNR- WS3. State of the art and recent advances in HD-sEMG: prospects in
neurorehabilitation – Room Pacinotti
Organizers Marco Gazzoni, Alberto Botter and Taian Vieira
Authors Title
Marco Gazzoni Introduction to the workshop
Taian Vieira Interpretation of Surface Electromyograms: The Spatial Localisation of
Muscle Activity

4th
International Conference on Neurorehabilitation
Alberto Botter Integration of HD-sEMG and ultrasounds for the assessment of muscle
function
Giacinto Luigi Cerone Wearable and Wireless HD-sEMG Acquisition Systems: Recent
advances
Ales Holobar Cumulative spike train outperforms the root-mean-square metric in
muscle excitation estimation from dynamic high-density EMG
Dario Farina High-Density EMG: Neurophysiology meets Biomechanics
ICNR- WS4. Advances and Challenges on the Development, Testing and Assessment of
Myo-Control for Prostheses and Assistive/Rehabilitation Robots – Room Fermi
Organizers Michele Barsotti, Domenico Buongiorno, Andrea D’Avella, Antonio
Frisoli
Authors Title
Domenico Buongiorno,
Michele Barsotti Introduction: Advances and challenges on MyoControl systems
Ivan Vujaklija Translating Advanced Myocontrol from the Laboratory to Clinics
Andrea Turolla Referral-to-therapy and treatment of upper limb using closed-loop
Myo-Control, in neurological disorders
Strahinja Dosen Closed-loop myoelectric interfacing in assistive robotics

4th
International Conference on Neurorehabilitation
Christian Cipriani Classification of Transient Myoelectric Signals for the Control of
Multi-Grasp Hand
Claudio Castellini Interactive (machine) learning, a key component of the HRI of the future
Vittorio Sanguineti,
Nicola Lotti
EMG-driven force fields: toward a myoprocessor for ’virtual
biomechanics
ICNR- WS5. Artificial Supernumerary Limbs for Clinical Neuroscience – Room Pacinotti
Organizers Domenico Prattichizzo, Gionata Salvietti
Authors Title
Etienne Burdet Motor control of 6-fingered hand
Domenico Prattichizzo
and Simone Rossi
(tandem talk)
The Robotic Sixth Finger: A wearable device for grasp compensation
and augmentation
Tamar Makin Neural correlated of hand augmentation
Antonio Bicchi An Active Supernumerary Hand for Grasping Assistance: the SoftHand
X

4th
International Conference on Neurorehabilitation
ICNR- WS6. The RONDA project: a robotic gym for stroke rehabilitation – Room Fermi
Organizers Silvestro Micera, Guido Giudetti
Authors Title
Silvestro Micera Introduction to the RONDA project
Cristina Spalletti Robotic Rehabilitation and Neuromodulation after stroke: novel
approaches in a mouse model
Emilio Trigili Design and control of upper-limb exoskeletons for rehabilitation and
assistance in daily-life activities
Antonio Frisoli -
Michele Barsotti- Fabio
Stroppa
Improved exoskeleton robotic training in post-stroke upper limb
rehabilitation: toward a motor learning paradigm
Federico Posteraro RONDA: a classification of upper limb robotic device to be used in
clinical practice
Carmelo Chisari -
Giuseppe Lamola
RONDA: Neurophysiological correlates of motor learning using upper
limb robotic devices in stroke patients
WeR2. Soft Wearable Robots – Room Galilei

4th
International Conference on Neurorehabilitation
Organizers
Conor J. Walsh, SEAS Harvard; Jesús Ortiz, IIT-ADVR; Eduardo
Rocon, CSIC; Lucia Beccai, IIT-CMBR; Chris Baten, RRD; Freygardur
Thorsteinsson, Össur; Julia Götz, Accelopment
Authors Title
Michele Xiloyannis, Domenico Chiaradia, Antonio Frisoli
and Lorenzo Masia
Characterisation of pressure
distribution at the interface of
a soft exosuit: towards a more
comfortable wear
Allan J Veale, Kyrian Staman and Herman van der Kooij
Realizing Soft High Torque
Actuators for Complete
Assistance Wearable Robots
Valerie Power, Adam de Eyto, Bernard Hartigan, Jesús Ortiz and
Leonard O'Sullivan
Application of a User-
Centered Design Approach to
the Development of XoSoft –
a Lower Body Soft
Exoskeleton
Ali Sadeghi, Alessio Mondini and Barbara Mazzolai
A Preliminary Experimental
Study on Variable Stiffness
Structures Based on Textile
Jamming for Wearable
Robotics
Massimo Totaro, Eliza Bottenberg, Richard Groeneveld, Laura
Erkens, Alessio Mondini, Ger Brinks and Lucia Beccai
Towards embroidered sensing
technologies for a lower limb
soft exoskeleton
Conor Walsh
Recent Results from
Evaluation of Soft Wearable
Robots in Clinical Populations
WeR3. Subject-centered based approaches for controlling Wearable Robots – Room Galilei
Organizers Samer Mohammed, Université Paris-Est Créteil (UPEC), France;
Mohamed Bouri, EPFL, Lausanne, Switzerland

4th
International Conference on Neurorehabilitation
Authors Title
Randa Kaddaj Mallat, Vincent Bonnet, Mohamad Khalil and
Samer Mohammed
Toward an Affordable Multi-
Modal Motion Capture
System Framework for
Human Kinematics and
Kinetics Assessment
Mehmet C. Yildirim, Ahmet Talha Kansizoglu, Polat Sendur and
Barkan Ugurlu
High Power Series Elastic
Actuator Development for
Torque-Controlled
Exoskeletons
Amalric Ortlieb, Peter Lichard, Florin Dzeladini, Romain Baud,
Auke Ijspeert, Hannes Bleuler and Mohamed Bouri
Investigation on Variable
Impedance Control for
Modulating Assistance in
Walking Strategies with the
AUTONOMYO exoskeleton
Fabian Just, Daniel Gunz, Jaime Duarte, Davide Simonetti, Robert
Riener and Georg Rauter
Improving Usability of
Rehabilitation Robots: Hand
Module Evaluation of the
ARMin Exoskeleton
Simon Gallo
Wearable and multimodal
haptic feedback for restoring
human body perception
Mohamed Bouri Lower Limb Exoskeletons,
From Specifications to Design
WeR4. Robotic and neuroprosthetic balance management approaches for walking assistance
– Room Galilei
Organizers Antonio del Ama, National Spinal Cord Injury Hospital, Spain; Juan
Moreno, Cajal Institute, Spain; and Jan Veneman, Hocoma AG.
Authors Title
Zlatko Matjacic, Matjaž Zadravec, Nataša Bizovičar, Nika
Goljar and Andrej Olenšek
Novel perturbation-based
approaches using pelvis
exoskeleton robot in gait and
balance training after stroke

4th
International Conference on Neurorehabilitation
Eva Swinnen, Jean-Pierre Baeyens, Nina Lefeber, Emma De
Keersmaecker, Stieven Henderix, Marc Michielsen and Eric
Kerckhofs
Balance during bodyweight
supported and robot-assisted
walking
Eleonora Croci, Roger Gassert and Camila Shirota
Maintaining gait balance after
perturbations to the leg:
kinematic and
electromyographic patterns
Mariangela Filosa, Ilaria Cesini, Elena Martini, Giacomo Spigler,
Nicola Vitiello, Calogero Maria Oddo and Simona Crea
A vibrotactile sensory
feedback system for lower-
limb amputees
Federica Barberi, Federica Aprigliano, Emanuele Gruppioni,
Angelo Davalli, Rinaldo Sacchetti, Alberto Mazzoni and Silvestro
Micera
Fast online decoding of motor
tasks with single sEMG
electrode in lower limb
amputees
Ilaria Cesini, Giacomo Spigler, Sahana Prasanna, Domitilla Taxis,
Filippo Dell’agnello, Elena Martini, Simona Crea, Nicola Vitiello,
Alberto Mazzoni and Calogero Maria Oddo
A wearable haptic feedback
system for assisting lower-
limb amputees in multiple
locomotion tasks
INBOTS1. The RONDA project: a robotic gym for stroke rehabilitation – Room D
Authors Title
Roberto Conti, Sarah
Terrreri Brief introduction of the workshop objectives
Nicola Vitiello, IUVO IUVO: a successful spin-off company on wearable robotics technologies
Francesco Ferro, PAL
Robotics PAL robotics: Humanoid robotics vision
Jody Saglia, Movendo Movendo: an IIT spin-off company
Andrea Bisson, Comau Comau Robotics: interactive robotics in the industrial field
4th
International Conference on Neurorehabilitation
Andrea Bisson, Comau Key Intellectual Property Aspects of Robotics
Sebastian Weide,
VDI/VDE Database tools for analysing the market
Roberto Conti, Sarah
Terrreri Final discussion about the two sessions
INBOTS2. Debate on legal, ethics & socio-economic aspects: TBD – Room D
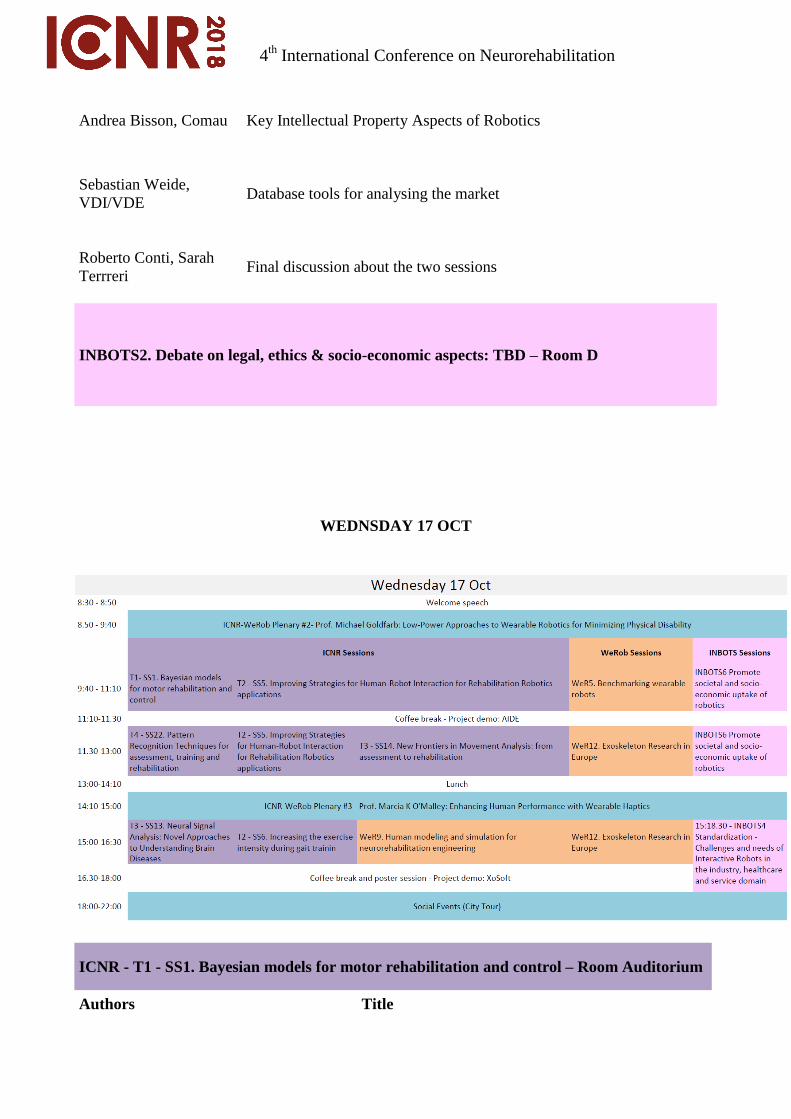
WEDNSDAY 17 OCT
ICNR - T1 - SS1. Bayesian models for motor rehabilitation and control – Room Auditorium
Authors Title

4th
International Conference on Neurorehabilitation
Organizer Luca Citi, University of Essex, UK
Camilla Pierella, Christian Giang, Elvira
Pirondini, Nawal Kinany, Martina Coscia,
Jenifer Miehlbradt, Cecile Magnin, Pierre
Nicolo, Adrian Guggisberg and Silvestro
Micera
Personalizing exoskeleton-based upper limb
rehabilitation using a statistical model: a pilot study
Sohail Siadatnejad, Francesco Negro and
Luca Citi
Hybrid Gaussian Point-Process Model for Finer
Control of Myoelectric Robotic Hands
Johannes Zajc, Markus Puchinger,
Michael Russold and Margit Gfoehler
Comparison of three control strategies for an upper
arm rehabilitation device
Matteo Bianchi
Human hand sensing and motor control: from
postural synergies to dynamic integration of touch
and proprioception
ICNR - T2 - SS5. Improving Strategies for Human-Robot Interaction for Rehabilitation
Robotics applications – Room Pacinotti
Authors Title
Organizers Giacomo Severini, Donal Holland.
Giacomo Severini A Perspective on the Use of Error Augmentation in
Robot-Assisted Gait Training of Stroke Survivors
Simone Benatti, Fabio Montagna, Victor
Javier Kartsch Morinigo, Abbas Rahimi
and Luca Benini
Towards Versatile Fast Training for Wearable
Interfaces in Prosthetics
Massimo Sartori, Guillaume Durandau,
Herman van der Kooij and Dario Farina
Multi-scale modelling of the human neuromuscular
system for symbiotic human-machine motor
interaction
Ivan Vujaklija Novel Control Strategies for Upper Limb Prosthetics
Krithika Swaminathan, Sangjun Lee,
Richard Nuckols, Dheepak Revi, Puneet
Singh, Rob Howe, Maurice Smith and
Conor Walsh
Biomechanics Underlying Subject-Dependent
Variability in Motor Adaptation to Soft Exosuit
Assistance
Demy Kremers, Justin Fong, Vincent
Crocher, Ying Tan and Denny Oetomo Sensorless Force Estimator in Rehabilitation Robotics
Conor Walsh Recent Results from Evaluation of Soft Wearable
Robots in Clinical Populations
Michele Barsotti, Fabio Stroppa, Nicola
Mastronicola, Simone Marcheschi and
Antonio Frisoli
Teleoperated bilateral-arm rehabilitation with ALEx
Rehab Station
Stefano Mazzoleni, Rossella Crecchi and
Federico Posteraro
Timing of motor recovery in subacute and chronic
stroke patients during upper limb robot-assisted
rehabilitation
Jaeyoung Kim, Minsu Chang and
Doyoung Jeon
The AI supervisor for the effective treadmill training
system of rehabilitation and exercise
Nicola Lotti, Davide Piscopiello and
Vittorio Sanguineti
An user model for adaptation of task parameters in
robot-assisted exercise
Mine Sarac, Daniele Leonardis,
Massimiliano Gabardi, Massimiliano
Solazzi and Antonio Frisoli
Bilateral Rehabilitation of Hand Grasping with an
Underactuated Hand Exoskeleton
4th
International Conference on Neurorehabilitation
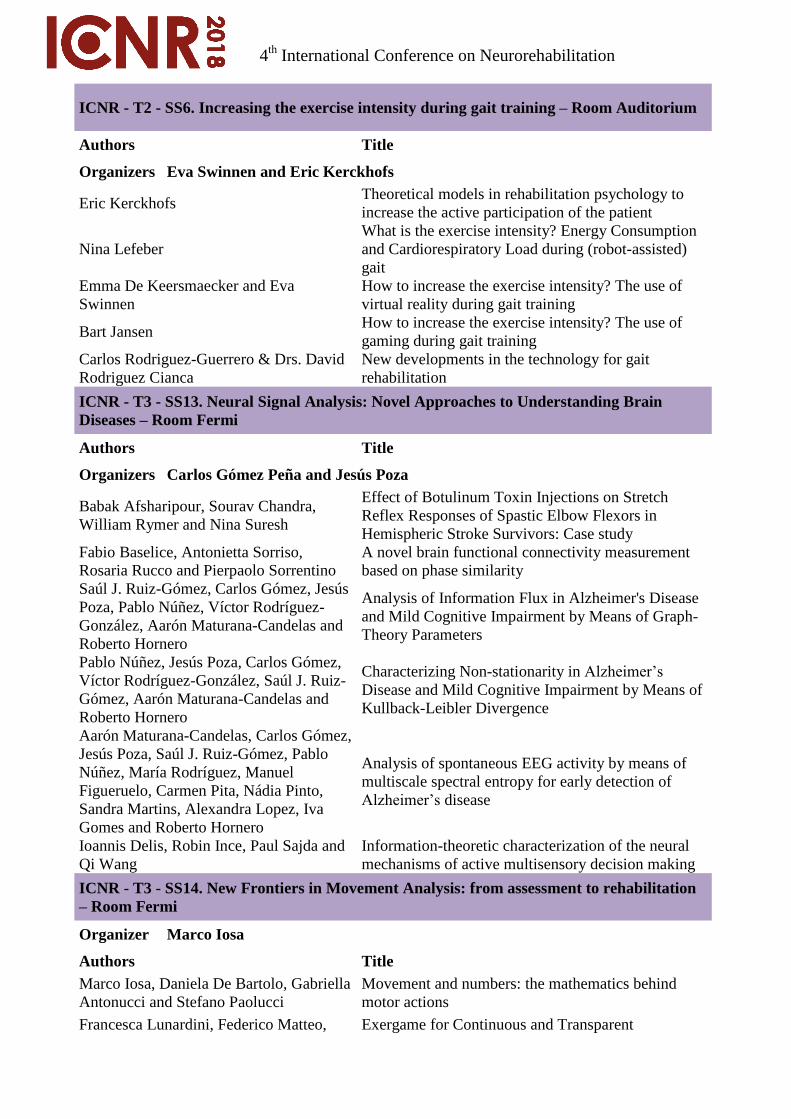
ICNR - T2 - SS6. Increasing the exercise intensity during gait training – Room Auditorium
Authors Title
Organizers Eva Swinnen and Eric Kerckhofs
Eric Kerckhofs Theoretical models in rehabilitation psychology to
increase the active participation of the patient
Nina Lefeber
What is the exercise intensity? Energy Consumption
and Cardiorespiratory Load during (robot-assisted)
gait
Emma De Keersmaecker and Eva
Swinnen
How to increase the exercise intensity? The use of
virtual reality during gait training
Bart Jansen How to increase the exercise intensity? The use of
gaming during gait training
Carlos Rodriguez-Guerrero & Drs. David
Rodriguez Cianca
New developments in the technology for gait
rehabilitation
ICNR - T3 - SS13. Neural Signal Analysis: Novel Approaches to Understanding Brain
Diseases – Room Fermi
Authors Title
Organizers Carlos Gómez Peña and Jesús Poza
Babak Afsharipour, Sourav Chandra,
William Rymer and Nina Suresh
Effect of Botulinum Toxin Injections on Stretch
Reflex Responses of Spastic Elbow Flexors in
Hemispheric Stroke Survivors: Case study
Fabio Baselice, Antonietta Sorriso,
Rosaria Rucco and Pierpaolo Sorrentino
A novel brain functional connectivity measurement
based on phase similarity
Saúl J. Ruiz-Gómez, Carlos Gómez, Jesús
Poza, Pablo Núñez, Víctor Rodríguez-
González, Aarón Maturana-Candelas and
Roberto Hornero
Analysis of Information Flux in Alzheimer's Disease
and Mild Cognitive Impairment by Means of Graph-
Theory Parameters
Pablo Núñez, Jesús Poza, Carlos Gómez,
Víctor Rodríguez-González, Saúl J. Ruiz-
Gómez, Aarón Maturana-Candelas and
Roberto Hornero
Characterizing Non-stationarity in Alzheimer’s
Disease and Mild Cognitive Impairment by Means of
Kullback-Leibler Divergence
Aarón Maturana-Candelas, Carlos Gómez,
Jesús Poza, Saúl J. Ruiz-Gómez, Pablo
Núñez, María Rodríguez, Manuel
Figueruelo, Carmen Pita, Nádia Pinto,
Sandra Martins, Alexandra Lopez, Iva
Gomes and Roberto Hornero
Analysis of spontaneous EEG activity by means of
multiscale spectral entropy for early detection of
Alzheimer’s disease
Ioannis Delis, Robin Ince, Paul Sajda and
Qi Wang
Information-theoretic characterization of the neural
mechanisms of active multisensory decision making
ICNR - T3 - SS14. New Frontiers in Movement Analysis: from assessment to rehabilitation
– Room Fermi
Organizer Marco Iosa
Authors Title
Marco Iosa, Daniela De Bartolo, Gabriella
Antonucci and Stefano Paolucci
Movement and numbers: the mathematics behind
motor actions
Francesca Lunardini, Federico Matteo, Exergame for Continuous and Transparent

4th
International Conference on Neurorehabilitation
Matteo Cesari, Nunzio Alberto Borghese
and Simona Ferrante
Monitoring of Handgrip Strength and Endurance
Fabrizio Patane Measurement accuracy in movement analysis
technology
Giovanni Morone, Simone Grandi,
Sheyda Ghanbari Ghoshchi, Marco Iosa
and Stefano Paolucci
Wearable devices and virtual reality for
neurorehabilitation: an opportunity for home
rehabilitation
Maurizio Petrarca The Development of Gait Analysis in Developmental
Age
Pietro Picerno, Pietro Caliandro, Chiara
Iacovelli, Chiara Simbolotti, Michele
Crabolu, Danilo Pani, Giuseppe Vannozzi
and Andrea Cereatti
Assessing reach-to-grasp movements in the stroke
unit: validity of an inertial sensor-based approach
ICNR - T4 - SS22. Pattern Recognition Techniques for assessment, training and
rehabilitation – Room Auditorium
Organizer Vitoantonio Bevilacqua
Authors Title
Michela Balconi, Davide Crivelli, Giulia
Fronda and Irene Venturella
Neuro-rehabilitation and neuro-empowerment by
wearable devices. Applications to well-being and
stress management
Laila Craighero The cortical motor code
Sara Invitto, Antonio Della Torre and
Ross Rinaldi
Neuroprosthetic haptic interface and haptic
stimulation: neuromorphic microtransduction and
EEG alpha variations
Lucia Billeci, Alessandro Tonacci,
Daniela Marino, Laura Insana, Giampaolo
Vatti and Maurizio Varanini
A machine learning approach for epileptic seizure
prediction and early intervention
Claudio Del Percio, Vitoantonio
Bevilacqua, Antonio Brunetti, Roberta
Lizio, Andrea Soricelli, Raffaele Ferri,
Flavio Nobili, Loreto Gesualdo, Giancarlo
Logroscino, Marina De Tommaso,
Antonio Ivano Triggiani, Marina Blūma,
Giovanni B Frisoni and Claudio Babiloni
Classification of healthy subjects and Alzheimer’s
disease patients with dementia from cortical sources
of resting state EEG rhythms: comparing different
approaches
Marina de Tommaso, Eleonora Gentile,
Katia Ricci, Anna Montemurno, Marianna
Delussi, Eleonora Vecchio, Giancarlo
Logroscino, Antonio Brunetti and
Vitoantonio Bevilacqua
Bioelectrical Correlates of Emotional Changes
Induced by Environmental Sound and Colour: from
Virtual Reality to Real Life
WeR5. Benchmarking wearable robots – Room Galilei
Organizers Diego Torricelli, Jan Veneman, Simona Crea
Authors Title
Jule Bessler, Leendert Schaake, Catherine
Bidard, Jaap Buurke, Aske Lassen, Kurt
Nielsen, José Saenz and Federico
Vicentini
COVR – Towards simplified evaluation and
validation of collaborative robotics applications
across a wide range of domains based on robot safety
skills
Matteo Lancini, Simone Pasinetti, Valeria Monitoring upper limbs during exoskeleton-assisted
4th
International Conference on Neurorehabilitation
Montini and Giovanna Sansoni gait outdoors
Roberto Conti, Francesco Giovacchini,
Lorenzo Saccares, Nicola Vitiello, Jose
Louis Pons and Diego Torricelli
What do people expect from robotic benchmarking?
Preliminary results of the EUROBENCH survey
Myunghee Kim, Ye Ding, Charles Liu,
Jinsoo Kim, Sangjun Lee, Nikolaos
Karavas, Conor Walsh and Scott
Kuindersma
Human-in-the-loop Bayesian Optimization of a
Tethered Soft Exosuit for Assisting Hip Extension
Diego Torricelli, David Pinto-Fernandez,
Roberto Conti, Nicola Vitiello and Jose
Luis Pons
A review of performance metrics for lower limb
wearable robots: preliminary results
Erik Prinsen and Jaap Buurke Human likeliness as a benchmarker for wearable
robotics
WeR9. Human modeling and simulation for neurorehabilitation engineering – Room C
Organizers J.M. Font-Llagunes, F.J. Alonso, J. Cuadrado.
Authors Title
Francisco Mouzo, Urbano Lugris, Javier
Cuadrado, Josep Maria Font-Llagunes and
Francisco Javier Alonso
Calibration and validation of a skeletal multibody
model for leg-orthosis contact force estimation
Matthew Millard, David
Franklin and Walter Herzog
A continuous and differentiable mechanical model of
muscle force and impedance
Friedl De Groote, Lorenzo Pitto, Hans
Kainz, Antoine Falisse, Eirini
Papageorgiou, Mariska Wesseling, Sam
Van Rossom, Kaat Desloovere and Ilse
Jonkers
SimCP: A Simulation Platform to Predict Gait
Performance Following Orthopedic Intervention in
Children with Cerebral Palsy
Renaud Ronsse Bio-inspired walking: from humanoids to assistive
devices
Peter Ferguson, Brando Dimapasoc, Yang
Shen and Jacob Rosen
Design of a Hand Exoskeleton for Use with Upper
Limb Exoskeletons
Marta Lorenzini, Wansoo Kim, Elena De
Momi and Arash Ajoudani
A Real-time Graphic Interface for the Monitoring of
the Human Joint Overloadings with Application to
Assistive Exoskeletons
WeR12. Exoskeleton Research in Europe – Room Galilei
Organizers Katja Mombaur, Jan Babic
Authors Title
Loris Roveda, Tito Dinon, Filippo Lucetti,
Nicola Pedrocchi and Lorenzo Molinari
Tosatti
H2020 CleanSky 2 EURECA: Design and Control of
a Cooperative Manipulator for Industrial Installation
Tasks
Jesús Ortiz, Christian Di
Natali and Darwin G. Caldwell
XoSoft - Iterative design of a modular soft lower limb
exoskeleton
Marco Caimmi, Ilaria Carpinella, Rachele
Di Giovanni, Dario Ellena, Lorenzo
Molinari Tosatti, Davide Cattaneo,
Maurizio Ferrarin and Claudio Solaro
Preliminary Usability and Efficacy Tests in
Neurological Patients of an Exoskeleton for Upper-
Limb Weight Support
Herman van der Kooij Symbitron: Symbiotic man-machine interactions in

4th
International Conference on Neurorehabilitation
wearable exoskeletons to enhance mobility for
paraplegics
Jesus Ortiz, Stefano Toxiri and Darwin
Caldwell
Beyond Robo-Mate: Towards the next generation of
industrial exoskeletons in Europe
Cristina Piazza, Manuel Giuseppe
Catalano, Matteo Bianchi, Emiliano
Ricciardi, Domenico Prattichizzo, Sami
Haddadin, Andreas Luft, Olivier
Lambercy, Roger Gassert, Eike
Jakubowitz, Herman Van Der Kooij,
Frederick Tonis, Fabio Bonomo,
Benjamin de Jonge, Tomas Ward, Kristin
D. Zhao, Marco Santello and Antonio
Bicchi
The Softpro project: Synergy-based Open-source
Technologies for Prosthetics and Rehabilitation
Diego Torricelli and Jose Luis Pons EUROBENCH: Preparing Robots for the Real World
Hannes Bleuler An Absolute MUST for Exoskeletons:
Personalization of Design, Actuation, Control
Jan Babič, Idsart Kingma, Jonas
Bornmann, Katja Mombaur, Matthias Näf,
Tadej Petrič, Han Houdijk, Jose
Gonzalez-Vargas, Saskia Baltrusch and
Nejc Šarabon
SPEXOR: Design and development of passive spinal
exoskeletal robot for low back pain prevention and
vocational reintegration
INBOTS4: Standardization - Challenges and needs of Interactive Robots in the industry,
healthcare and service domain – Room D
Authors Title
Saskia Maresch, DIN e. V./ Germany/
National Standardization Body
Standardization in the R&D phase – how can this
support SMEs?
Saskia Maresch, DIN e. V./ Germany/
National Standardization Body
Inclusive robots for a better society (Inbots) – what
is being done in relation to standardization
Prof. Gurvinder Singh Virk (InnoTecUK
and CLAWAR, United Kingdom/ ISO TC
299
ISO Safety and modularity standards for service
robots
Francesco Ferro (PAL Robotics/ Spain/
SME)
Certification process for service robots – CE mark
and challenges
Arantxa Renteria (TECNALIA/ Spain/
R&D)
Medical robotics and the daunting certification
process
Andras Toth (Budapest University of
Technology and Economics/Hungary /
R&D)
Attitudes in standards management at start-up and
developing SMEs – analysis of case studies from the
wearable robot domain
Massimo Di Pardo (Centro Ricerche Fiat/
Italy/ R&D)
Human robot collaboration criteria for the
implementation in the shop floor
Prof. Michiel de Looze (TNO/ the
Netherlands/ R&D)
Need for evaluation standards in relation to industrial
exoskeletons
Jule Bessler (Roessingh Research and
Development/ the Netherlands/ R&D)
COVR – towards simplified evaluation and
validation of collaborative robotics applications
across a wide range of domains based on robot safety
skills
Prof. Gurvinder Singh Virk, Andras Toth,
Jan Veneman, Prof. Michiel de Looze
Panel
Standardization - Challenges and needs of Interactive
Robots in the industry, healthcare and service domain

4th
International Conference on Neurorehabilitation
INBOTS6: Promote societal and socio-economic uptake of robotics – Room D
Authors Title
Prof. Robert Riener, ETH Zurich Rehabilitation 4.0: What robots will change!
Domenico Prattichizzo, Monica Malvezzi,
Gionata Salvietti, UNISI
Supernumerary Robotic Fingers to Compensate and
Augment Human Manipulation Abilities
Thomas Ryberg, Robotics Care AB Challenges and opportunities of robotic innovations
in elderly care
Kilian Baur, Florian L. Haufe, Roland
Sigrist, Katrin Dorfschmid, and Robert
Riener, ETH Zurich
The Cybathlon - Bionic Olympics to benchmark
assistive technologies
Dimitris Alimisis, Dimitrios Loukatos,
Emmanouil Zoulias, Rene Alimisi
The Role of Education for the Social and Economic
Uptake of Robotics: the Case of the eCraft2Learn
Project
THURSDAY 18 OCT
ICNR-T1-SS2. Translating research prototypes to bedside: the lesson-learnt of the
RETRAINER EU project – Room Auditorium
Organizers Alessandra Pedrocchi, Maria Bulgheroni, Emilia Ambrosini, and Walter
Baccinelli
Authors Title
Franco Molteni, Mauro Rossini, Giulio
Gasperini, Davide Proserpio, Karsten
A wearable hand neuroprosthesis for hand
rehabilitation after stroke: preliminary results of the
4th
International Conference on Neurorehabilitation
Krakow, Nancy Immick, Andreas
Augusten, Johannes Zajc, Andrea Crema
and Silvestro Micera
RETRAINER S2 randomized controlled trial
Michael Russold and Johannes Zajc The role of industry in a H2020 innovation action –
Transferring research into products
Walter Baccinelli, Franco Molteni and
Maria Bulgheroni
Smart objects in rehabilitation
Constantin Wiesener, Emilia Ambrosini,
Leo Blankenfeld, Simon Schneider, Björn
Grzywacz and Thomas Schauer
Wireless IMU- and EMG-sensors for controlled
Functional Electrical Stimulation
Markus Puchinger, Nithin Babu Rajendra
Kurup and Margit Gfoehler
Passive light-weight arm exoskeleton: possible
applications
Alessandra Pedrocchi and Maria
Bulgheroni
RETRAINER project: perspectives and lesson learnt
on clinical trial in rehabilitation robotics toward
industrial exploitation
Alberto Antonietti, Marta Gandolla, Emilia
Biffi, Eleonora Diella, Valerio Martocchi,
Grazia D'Angelo and Alessandra Pedrocchi
Clinical benefits and acceptability of two
commercial arm exoskeletons for patients with
muscular dystrophy
ICNR - T2 - SS8. Neurorehabilitation from clinical perspective and robotic perspective:
Contradictions and Integrations – Room Pacinotti
Organizers Shingo Shimoda, Fady Alnajjar, Juan Moreno, Hitoshi Hirata
Authors Title
Guillermo Asín-Prieto, Fady Alnajjar,
Aitor Martínez-Expósito, Shingo Shimoda,
José Luis Pons and Juan C. Moreno
Feasibility of submaximal force control training for
robot-mediated therapy after stroke
Katsuyuki Iwatsuki, Shintaro Oyama,
Minoru Hoshiyama, Shingo Shimoda and
Hitoshi Hirata
Evaluation of the brain function for the myoelectric
hand prosthesis with tacit learning system
Kei Kikuchi, Takashi Watanabe, Ryusei
Morita, Katsunori Murakami and Naomi
Kuge
A Pilot Study of Relationship between Hip Joint
Movement and FES Foot Drop Correction with a
Hemiplegic Subject
Nada Signal, Kelly Scott, Denise Taylor
and Nicola Kayes
What helps or hinders the uptake of new
technologies into rehabilitation practice?
Giovanni Morone, Marco Iosa, Daniela De
Bartolo, Gabriella Antonucci and Stefano
Paolucci
Tailored, Technological Therapy: physician and
therapists point of view on robotic rehabilitation
Belal Alsinglawi, Omar Mubin, Fady
Alnajjar and Mauricio Novoa
A Framework for Home-based Stroke Rehabilitation
Using Interactive Games and Augmented Reality
Feedback
ICNR - T2- SS9. Balance control during walking-related motor tasks – Room Auditorium
Organizers Federica Aprigliano and Dario Martelli
Authors Title
Herman van der Kooij Are ankle muscle responses in balance recovery
hard-wired?

4th
International Conference on Neurorehabilitation
Julia Marshall Leach, Sabato Mellone,
Pierpaolo Palumbo and Lorenzo Chiari
The Improvement of Turning Ability is a Key
Objective for Fall-Risk Reduction in Individuals
with Impaired Dynamic Stability
Volker Dietz Performance of functional arm and leg movements
depends on neural coupling
Carlotta Caramia, Cristiano De Marchis
and Maurizio Schmid
Differentiating the Effects of Motor and Cognitive
Dual-Tasks on Gait Performance of Young Healthy
Subjects
Federica Aprigliano, Vito Monaco,
Peppino Tropea, Dario Martelli, Nicola
Vitiello and Silvestro Micera
Counteracting balance loss by using wearable
robotics
Dario Martelli, Federica Aprigliano and
Sunil K. Agrawal
Gait Adjustments Against Multidirectional Waist-
pulls in Cerebellar Ataxia and Parkinson’s Disease
ICNR-T2 -SS10. The use of ambulant technology in stroke rehabilitation
Organizer Erik Prinsen
Authors Title
Franchino Porciuncula, Richard Nuckols,
Nikolaos Karavas, Chih-Kang Chang,
Teresa Baker, Dorothy Orzel, David Perry,
Terry Ellis, Lou Awad and Conor J. Walsh
Assisting Limb Advancement During Walking in
Stroke Using a Wearable Soft Hip Exosuit: A Proof-
of-Concept
Jeremia P. O. Held, Peter Veltink, Fokke
B. van Meulen, Andreas Luft and Jaap
Buurke
Measurement of upper limb function during daily
life after stroke
Jianjia Ma, Daniele Magistro and
Massimiliano Zecca
Synchronizing Connection-Oriented Distributed
Sensor Network using Bluetooth Low Energy with
Unmodified Android Device
Simone S. Fricke, Cristina Bayón, Herman
van der Kooij and Edwin H.F. van
Asseldonk
Pilot Study of a Performance-Based Adaptive
Assistance Controller for Stroke Survivors
Zhibing Song, Xiuqi Hu and Jiansheng Dai A Novel Design of Nonlinear Stiffness Actuator for
Neurorehabilitation Robots
Edwin Daniel Oña Simbaña, Alberto
Jardón Huete, Esther Monge Pereira,
Francisco Molina Rueda, Roberto Cano de
La Cuerda and Carlos Balaguer
Towards Automated Assessment of Upper Limbs
Motor Function Based on Fugl-Meyer Test and
Virtual Environment
ICNR - T3 - SS15. Modeling Joint Neuromechanics and Its Applications: System
Identification Approach - Room Pacinotti
Organizers Ehsan Sobhani Tehrani, Kian Jalaleddini, Robert E. Kearney
Authors Title
Alfred Schouten and Winfred Mugge Closed-loop identification to unravel the way the
human nervous system controls bodily functions
Winfred Mugge, Jacobus J. van Hilten,
Frans C. T. van der Helm and Alfred
Schouten
Reflex mechanisms in CRPS-related dystonia

4th
International Conference on Neurorehabilitation
Guilherme Aramizo Ribeiro, Lauren Knop
and Mo Rastgaar
Linear Correlation between Ankle Impedance and
EMG Signals
Ehsan Sobhani Tehrani, Kian Jalaleddini
and Robert Kearney
Short Segment and Parameter Varying Identification
of Time-Varying Dynamic Joint Stiffness
Mehdi M Mirbagheri
Applications of System Identification Techniques in
Characterizing and Tracking Neuromuscular
Abnormalities
Stefano Mazzoleni, Vi Do Tran, Gastone
Ciuti, Zhibin Song and Paolo Dario
A biomechanical model of the shoulder including
acromioclavicular joint ligaments: preliminary
results
ICNR-T3-SS16. Machine Learning in NeuroRehabilitation – Room Fermi
Organizer Zach McKinney
Authors Title
Juan Haladjian, Sajjad Taheri and Bernd
Bruegge
Wearable Sensors for Patients
Baojun Chen, Vito Papapicco, Andrea
Parri, Simona Crea, Marko Munih and
Nicola Vitiello
A preliminary study on locomotion mode
recognition with wearable sensors
Amanda Bernstein, Rejin J. Varghese,
Jindong Liu, Zhiqiang Zhang and Benny
Lo
An Assistive Ankle Joint Exoskeleton for Gait
Impairment
Ioannis Delis, Pauline M Hilt, Thierry
Pozzo and Bastien Berret
Simultaneous alignment of EMG data and
identification of spatial-temporal muscle synergies
Ines Bahej, Ieuan Clay, Martin Jaggi and
Valeria De Luca
Prediction of patient-reported physical activity
scores from wearable accelerometer data: a
feasibility study
ICNR-T3-SS17. Non-Invasive Stimulation At Different Level Of Nervous System In
Neurorehabilitation – Room Fermi
Organizer Hatice Kumru
Authors Title
Josep Valls-Sole Non-invasive cerebral and non-cerebral therapeutic
stimulation in Neurology
Luca Sebastianelli, Viviana Versace,
Raffaele Nardone and Leopold Saltuari
Repetitive Transcranial Magnetic Stimulation
(rTMS) for the improvement of upper limb function
in stroke patients
Christian Meyer, Ursula Hofstötter,
Michèle Hubli, Armin Curt and Marc
Bolliger
Transcutaneous electrical spinal cord stimulation –
Effects on motor control in individuals with
incomplete spinal cord injury
Guillermo C García Barajas, Diego
Serrano-Muñoz, Julio Gómez-Soriano,
Josue Fernández Carnero, Juan Avendaño,
Elena Demertzis and Julian Taylor
Targeting the Endogenous Pain Modulation System
Marco Paoloni Neurovibration in neurorehabilitation

4th
International Conference on Neurorehabilitation
Julia Scott Targeting the Endogenous Pain Modulation
System
ICNR-T4- SS19. Multimodal neural interfaces for rehabilitation and assistance of people
with disability – Room Fermi
Organizers Eduardo López-Larraz and Jaime Ibáñez
Authors Title
Roberta Lizio Monitoring of lifestyle and cognitive status in
seniors at risk of dementia: the SmartAging program
Natalie Mrachacz-Kersting, Susan
Aliakbaryhosseinabadi, Ning Jiang and
Dario Farina
The efficacy of a Real-time vs an Offline
Associative Brain-Computer-Interface
Eduardo López-Larraz, Niels Birbaumer
and Ander Ramos-Murguialday
Designing hybrid brain-machine interfaces to detect
movement attempts in stroke patients
Francesco Negro, Marta Cogliati,
Alessandro Cudicio, Luciano Bissolotti and
Claudio Orizio
Neural Biomarkers of Functional Recovery in
Patients with Injured Motor System
Aitor Martínez-Expósito, Jaime Ibañez,
Enrique Viosca and José Luis Pons
Brain-machine interface and functional electrical
stimulation for pedaling increases corticospinal
excitability in a stroke patient: A case study.
Floriana Pichiorri, Emma Colamarino,
Febo Cincotti and Donatella Mattia
An All-in-one BCI-supported Motor Imagery
Training Station: Validation in a Real Clinical
Setting with Chronic Stroke Patients
ICNR - T4 - SS25. Reshaping Perception and Action in Human-Machine Interfaces – Room
Auditorium
Organizers Maura Casadio, Ferdinando Mussa-Ivaldi and Ilana Nisky
Authors Title
Chen Avraham and Ilana Nisky
Integration of kinesthetic and tactile information for
manipulation and grip force control during force-
field adaptation
Ian Howard, Sae Franklin and David
Franklin
Characterization of neural tuning: visual lead-in
movements generalize in speed and distance
Joel Mintz, Dalia De Santis, Fabio
Rizzoglio, Ali Farshchiansadegh and
Sandro Mussa-Ivaldi
Designing visual feedback to reshape muscle
coordination
Sonmin Yun, Wen Wen, Qi An, Shunsuke
Hamasaki, Hiroshi Yamakawa, Yusuke
Tamura, Atsushi Yamashita and Hajime
Asama
Investigating the Relationship between Assisted
Driver's SoA and EEG
Valentina Ponassi, Elisa Galofaro, Giulia
Ballardini, Giorgio Carlini, Laura
Pellegrino, Francesca Marini, Pietro
Morasso and Maura Casadio
The interaction between position sense and force
control
Andria Farrens, Andrea Zonnino and
Fabrizio Sergi
The effects of force-field adaptation on neural
activation and resting-state functional connectivity
4th
International Conference on Neurorehabilitation
ICNR-T4-SS26. Brain-state dependent non-invasive neuromodulation of human cortex –
Room Auditorium
Organizers Christoph Zrenner and Mrachacz-Kersting
Authors Title
Ulf Ziemann, Debora Desideri, Paolo
Belardinelli and Christoph Zrenner
Brain-state dependent stimulation in human motor
cortex for plasticity induction using EEG-TMS
Natalie Mrachacz-Kersting, Strahinja
Dosen, Susan Aliakbaryhosseinabadi,
Esther M Pereira, Andrew Stevenson, Ning
Jiang and Dario Farina
Brain-state dependent peripheral nerve stimulation
for plasticity induction targeting upper-limb
Andrew J. T. Stevenson, Helle R. M.
Jørgensen, Kåre E. Severinsen, Susan
Aliakbaryhosseinabadi, Ning Jiang, Dario
Farina and Natalie Mrachacz-Kersting
Brain state-dependent peripheral nerve stimulation
for plasticity induction in stroke patients
Jaime Ibáñez, Ricci Hannah, Lorenzo
Rocchi and John C. Rothwell
Repeated directional TMS paired with motor
intentions– different responses of two sets of
interneuron circuits?
Francisco Resquin, Jaime Ibáñez, Oscar
Herrero, José González Vargas, Fernando
Brunetti and José Luis Pons
Brain State-Dependent Stimulation for Modulating
Cortical Excitability
Brigitte Zrenner, Pedro Gordon, Anna
Kempf, Eric McDermott, Christian
Plewnia, Surjo Soekadar, Andreas
Fallgatter, Christoph Zrenner, Ulf Ziemann
and Florian Müller-Dahlhaus
Alpha-synchronized stimulation of the dorsolateral
prefrontal cortex (DLPFC) in major depression: a
proof-of-principle EEG-TMS study
ICNR - T4 - SS27. The Future of Neurorehablitation: from regenerative medicine to
robotics to brain-computer interfaces – Room Fermi
Organizers Fabrisia Ambrosio, Michael Boninger
Authors Title
Jennifer L. Collinger, Ahmed Jorge, Jeffrey
M. Weiss, Kristin M. Quick, Elizabeth
Tyler-Kabara, Michael L. Boninger
Intracortical control of a powered hand exoskeleton
by a person with tetraplegia
Laura J Miller, Michael Boninger, Michel
M Modo and Fabrisia Ambrosio
CLINICIAN/RESEARCH COLLABORATIONS:
THE KEY TO THE TRANSLATIONAL SUCCESS
OF REGENERATIVE REHABILITATION
THERAPEUTICS
Maria Chiara Carrozza The future of robotics for rehabilitation and personal
assistance
Marzia Bedoni
Biophotonics platform for the detection of
circulating extracellular vesicles involved in
neurological diseases, pathogenesis, and response to
rehabilitation treatment
WeR7. Wearable Robotics for rehabilitation and assistance in Latin America – Room
Galilei

4th
International Conference on Neurorehabilitation
Organizers Juan-Manuel Ibarra Zannatha, Alberto-Isaac Pérez-SanPablo, Santos-
Miguel Orozco, Luís Eduardo Rodríguez Cheu,
Authors Title
Mauricio Adolfo Ramírez Moreno, Santos
Miguel Orozco-Soto, Juan Manuel Ibarra-
Zannatha and Dania Gutiérrez-Ruiz
Artificial Vision Algorithm for Object Manipulation
with a Robotic Arm in a Semi-Autonomous Brain-
Computer Interface
Alberto Isaac Perez Sanpablo, Catherine
Disselhorst-Klug, Juan Manuel Ibarra
Zannatha, Josefina Gutierrez-Martinez,
Alicia Meneses Peñaloza, Elisa Romero-
Avila and Santos Miguel Orozco-Soto
One degree of freedom wearable exoskeleton for
children with spasticity
Anacecilia Villa Parra, Denis Delisle
Rodriguez, Jessica Souza Lima, Teodiano
Freire Bastos and Anselmo Frizera-Neto
Stance Control with the Active Knee Orthosis
ALLOR for Post-Stroke Patients during Walking
Pablo Caicedo, Carlos Felipe Rengifo
Rodas, Luis Rodriguez Cheu and Wilson
Alexander Sierra Arevalo
Gait phase detection for lower limb prosthetic
devices
Antonio J. Del-Ama, José M Azorín, José
L. Pons, Anselmo Frizera, Thomaz
Rodrigues, Angel Gil-Agudo, Javier O.
Roa and Juan C. Moreno
Lower Limb Exoskeletons in Latin-America
Santos Orozco, Alberto Isaac Perez
Sanpablo, Pablo Vera Bustamante and Juan
Manuel Ibarra Zannatha
Visual-Inertial Motion Tracking System for
Spasticity Evaluation
WeR8. Wearable robotic solutions for factories of the future – Room Galilei
Organizers Carlos Rodriguez, K.Mombaur, Jan Babic
Authors Title
Stefano Toxiri, Andrea Calanca, Tommaso
Poliero, Darwin G. Caldwell and Jesús
Ortiz
Actuation requirements for assistive exoskeletons:
exploiting knowledge of task dynamics
Baojun Chen, Lorenzo Grazi, Francesco
Lanotte, Nicola Vitiello and Simona Crea
Lift movement detection with QDA classifier for an
active hip exoskeleton
Saskia Baltrusch, Jaap van Dieën, Sjoerd
Bruijn, Axel Koopman, Coen van
Bennekom and Han Houdijk
The Effect of a Passive Trunk Exoskeleton on
Functional Performance and Metabolic Costs
Matthias B. Näf, Axel S. Koopman, Carlos
Rodriguez-Guerrero, Bram Vanderborght
and Dirk Lefeber
Trunk Range of Motion in the Sagittal Plane with
and without a Flexible Back Support Exoskeleton
Mišel Cevzar, Tadej Petrič, Jan
Babič and Marko Jamšek
Real-time control of quasi-active hip exoskeleton
based on Gaussian mixture model approach
Monika Harant, Manish Sreenivasa,
Matthew Millard, Nejc Šarabon and Katja
Mombaur
Optimizing Design Characteristics of Passive and
Active Spinal Exoskeletons for Challenging
Working Tasks
IEEE BRAIN Initiative Symposium on Advanced Technology for NeuroRehabilitation –
Room Galilei
Organizer Metin Akay

4th
International Conference on Neurorehabilitation
Authors Title
Zev Rymer Translational Neural Engineering: Bringing
Neurotechnology into the Clinics
Jose Pons Bidirectional Hyper-Connected Neural Systems
Paul Sajda Rehabilitating the mind: Non-invasive
neurotechnology for treating psychiatric illness
Ted Berger A Hippocampal NeuroProsthesis for Human
Memory
Silvestro Micera Restoring sensory and motor function using
intraneural peripheral stimulation.
Dario Farina Interfacing spinal motor neurons for man-machine
interfacing
INBOTS3: Highly-accessible and multidisciplinary education tools in robotics – Room D
Authors Title
Emanuele Menegatti, University of Padova Educational Robotics! Because robotics is about
humans, not robots
Dimitris Alimisis (EDUMOTIVA)
Andre Seyfarth and Christian Schumacher
(TU Darmstadt)
COST Interactive presentation/discussion
Carina Girvan, Cardiff University Designing Educational Robotics Activities for All
Camila Shirota (COST, ETH)
Maria Pozzi/Monica Malvezzi/Domenico
Prattichizzo (INBOTS, UNISI)
INBOTS Interactive presentation/discussion/conclusion
INBOTS5: Regulatory &risk management framework – Room D
Authors Title
Joann Bryson (Bath University)
Gianpiero Negri (CNH R&D)
Marck Coecklberg (Vienna Univeristy)
Andrea Bertolini (SSSA)
Tatjana Evas (Policy Analyst, European
Commission)
Lillà Montagnani (Bocconi Univiersity)
FRIDAY 19 OCT
4th
International Conference on Neurorehabilitation
ICNR- T1 -SS3. Computer Models in the Design of Neurotechnologies and Rehabilitation
Tools – Room Auditorium
Organizer Marco Capogrosso
Authors Title
Scott Lempka, Hans Zander, Carlos Anaya,
Alexandria Wyant, John Ozinga and Andre
Machado
Model-based Analysis of Spinal Cord Stimulation
for Chronic Pain
Nathan Greiner and Marco Capogrosso
Anatomically Realistic Computational Model to
Assess the Specificity of Epidural Electrical
Stimulation of the Cervical Spinal Cord
Stanisa Raspopovic and Francesco Petrini A computational model for a design of lower-limb
sensorimotor neuroprostheses
Massimo Sartori, Guillaume Durandau,
Strahinja Dosen and Dario Farina
Decoding phantom limb neuro-mechanical function
for a new paradigm of mind-controlled bionic limbs
Matteo Saponati, Giulio Ceccarelli, Enrico
Cataldo and Alberto Mazzoni
A simple and complete model of thalamocortical
interactions for neuroengineering applications

4th
International Conference on Neurorehabilitation
ICNR - T1 - SS4. New perspectives in upper limb prosthetics: from the robotics laboratory
to clinical use – Room Auditorium
Organizers Antonio Bicchi, Matteo Bianchi, Manuel Giuseppe Catalano
Authors Title
Christian Cipriani
Non-invasive, temporally discrete feedback
improves grasp control of closed-loop myoelectric
transradial prostheses
Marco Santello Optimizing performance of a force-feedback-
enabled, soft-synergy-based prosthetic hand
Kristin Zhao SoftHand Pro, a clinical assessment
Marcia O’Malley Haptic Feedback for Intuitive Prosthesis Control,
Eike Jakubowitz Testing the SoftHand Pro – Clinical Insights from
and with Experienced Myoelectric Prosthesis User
Giuseppe Averta, Edoardo Battaglia,
Cosimo Della Santina, Manuel Giuseppe
Catalano and Matteo Bianchi
A synergistic behavior underpins human hand
grasping force control during environmental
constraint exploitation
Sigrid Dupan, Ivan Vujaklija, Martyna
Stachaczyk, Janne Hahne, Dick Stegeman,
Strahinja Dosen and Dario Farina
Online simultaneous myoelectric finger control
Cristina Piazza, Manuel Catalano, Antonio
Bicchi and Levi Hargrove
Preliminary Results Toward Continuous and
Proportional Control of a Multi-Synergistic Soft
Prosthetic Hand
Alireza Mohammadi, Jim Lavranos, Peter
Choong and Denny Oetomo
X-Limb: A Soft Prosthetic Hand with User-friendly
Interface
Giacomo Valle, Silvestro Micera and
Alberto Mazzoni
Long-term exploitation of intraneural stimulation in
three trans-radial amputees
Linda Paternò, Michele Ibrahimi, Elisa
Rosini, Leonardo Ricotti and Arianna
Menciassi
Residual limb volume changes in transfemoral
amputees due to physical activity
ICNR - T2 - SS7. Shaping robotic training to maximize patient outcome: new trends and
perspectives – Room Pacinotti
Organizers Roberto Colombo, Vittorio Sanguineti
Authors Title
Roberto Colombo, Alessandra Mazzone,
Carmen Delconte and Alfredo Raglio
Patient Motivation and Rewarding to Maximize
Outcome: a Sensory Perspective
Patrizio Sale Use of EEG signal information to optimize training
and promote plasticity
Sara Contu, Angelo Basteris, Tegan K
Plunkett, Christopher Wk Kuah, Karen S
Chua, Domenico Campolo and Lorenzo
Masia
Evolution of proprioceptive dysfunctions after
stroke: insights from robotic metrics
Martina Coscia, Laura Pellegrino, Camilla
Pierella, Elvira Pirondini, Nawal Kinany,
Jenifer Miehlbradt, Cecile Magnin, Pierre
Nicolo, Psiche Giannoni, Lucio Marinelli,
Training muscle synergies to relearn movement:
current perspectives and future trends

4th
International Conference on Neurorehabilitation
Adrian Guggisberg, Maura Casadio and
Silvestro Micera
Andrés Úbeda, Alessandro Del Vecchio,
Ivan Vujaklija and Dario Farina
Analysis of intramuscular motor unit coherence in
the tibialis anterior muscle as a tool for the
assessment of robot-assisted rehabilitation
Vittorio Sanguineti, Giulia Sedda, Rita
Franzosi, Alessandra Mazzone and Roberto
Colombo
Robot assisted exercise: modelling the recovery
process to personalise therapy
ICNR - T2 - SS11. Redundancy and modularity in motor control: neuroscience, prosthetic,
rehabilitative and assistive approaches – Room Pacinotti
Organizers Diego Torricelli, Cristiano De Marchis, Andrea D’Avella, Leonardo Cappello
Authors Title
Michele Xiloyannis, Letizia Galli,
Domenico Chiaradia, Antonio Frisoli,
Francesco Braghin and Lorenzo Masia
A Soft Tendon-Driven Robotic Glove: Preliminary
Evaluation
Elisabetta Peri, Emilia Ambrosini, Cristiano
De Marchis, Claudia Nava, Luca Longoni,
Alessandra Pedrocchi, Giorgio Ferriero and
Simona Ferrante
Does cycling training augmented by Functional
Electrical Stimulation impact on muscle synergies
in post-acute stroke patients?
Tomas A. Lenssen, Leonardo Cappello,
Dick H. Plettenburg, Christian Cipriani and
Marco Controzzi
Principal orientations of the wrist during ADLs:
towards the design of a synergetic wrist prosthesis
Giuseppe Averta, Franco Angelini, Antonio
Bicchi, Gaetano Valenza and Matteo
Bianchi
On the Role of Postural Synergies for Grasp Force
Generation and Upper Limb Motion Control
Dalia De Santis and Ferdinando Mussa-
Ivaldi
Guiding the reorganization of motor redundancy for
assistance and rehabilitation after spinal cord injury
Francesco Scotto di Luzio, Francesca
Cordella, Clemente Lauretti, Francesco
Draicchio and Loredana Zollo
Assessment of muscular activation patterns in 3D
upper limb robot-aided rehabilitation
ICNR - T3 - SS18. Cognitive approaches for rehabilitation of patients with neurological
disorders – Room Pacinotti
Organizer Francisco Molina Rueda
Authors Title
Lizbeth Peralta-Malváez and Gibran
Etcheverry
Individual Alpha Peak Frequency’s Dataset through
Neurofeedback’s protocol
Matteo Morando, Silvana Dellepiane,
Francesca Cecchi, Giorgia Giannarelli and
Serena Olivieri
Monitoring Home-Based Activity of Stroke
Patients: A Digital Solution for Visuo-Spatial
Neglect Evaluation
Martina Maier, Sock Ching Low, Belén
Rubio Ballester, Nuria Leiva Bañuelos,
Esther Duarte Oller and Paul F. M. J.
Verschure
Depression Modulates Attentional Processing after
Stroke
Leonardo Martini, Laura Fabbri, Silvia
Pancani, Irene Mosca, Filippo Gerli and
Federica Vannetti
Preliminary investigation of a newly developed tele-
rehabilitation program for people living with MCI
condition
4th
International Conference on Neurorehabilitation
Elisa Pedroli, Silvia Serino, Pietro Cipresso,
Gianluca De Leo, Karine Goulene, Sandra
Morelli, Giuseppe D'Avenio, Marco
Stramba-Badiale, Mauro Grigioni, Andrea
Gaggioli and Giuseppe Riva
An immersive cognitive rehabilitation program: a
case study
ICNR - T4 - SS20. Application of Functional Electrical Stimulation (FES) to lower limb
movement assistance – Room Fermi
Organizer Christine Azevedo Coste
Authors Title
Brian Andrews, Robin Gibbons, Simon
Goodey, Adrian Poulton and James Shippen
Towards the Development of Full Motion FES
Rowing with Accurate Ergometry: RowStim IV
Constantin Wiesener, Andreas Niedeggen
and Thomas Schauer Electrotactile feedback for FES-assisted swimming
Benoît Sijobert, Charles Fattal, Joanna
Pontier and Christine Azevedo Coste
FES-based control of knee joint to reduce stance
phase asymmetry in post-stroke gait: feasibility
study
Emilia Ambrosini, Simona Ferrante, Monica
Parati and Alessandra Pedrocchi
Cycling induced by Functional Electrical
Stimulation in Stroke Patients: a systematic review
and a meta-analysis of the evidence
Antônio Bó, Ana Claudia Lopes, Lucas
Fonseca, Claudia Ochoa-Diaz, Christine
Azevedo Coste and Emerson Fachin-
Martins
Experimental results and design considerations for
FES-assisted transfer for people with spinal cord
injury
Filipe Barroso, Bryan Yoder, Josephine
Wallner, Maria Jantz, Pablo Tostado,
Evonne Pei, Vicki Tysseling, Lee Miller and
Matthew Tresch
Cortically controlled FES for restoration and
rehabilitation of function following SCI in rats
ICNR - T4 - SS21. Uncovering neural mechanisms of post-stroke recovery using clinical
imaging tools – Room Fermi
Organizers Nawal Kinany and Elvira Pirondini
Authors Title
Pierre Nicolo, Cecile Magnin, Elena
Pedrazzini, Armin Schnider and Adrian
Guggisberg
Transcranial direct current stimulation reduces
secondary white-matter degradation after stroke
Nawal Kinany, Camilla Pierella, Elvira
Pirondini, Martina Coscia, Jenifer
Miehlbradt, Cécile Magnin, Pierre Nicolo,
Dimitri Van De Ville, Adrian Guggisberg
and Silvestro Micera
Resting-state functional connectivity in stroke
patients after upper limb robot-assisted therapy: a
pilot study
Elvira Pirondini, Camilla Pierella, Nawal
Kinany, Martina Coscia, Jenifer Miehlbradt,
Cecile Magnin, Pierre Nicolo, Adrian
Guggisberg, Silvestro Micera, Leon Deouell
and Dimitri Van de Ville
On the potential of EEG biomarkers to inform
robot-assisted rehabilitation in stroke patients
Emma Colamarino, Floriana Pichiorri,
Donatella Mattia and Febo Cincotti
Bipolar filters improve usability of Brain-Computer
Interface technology in post-stroke motor
rehabilitation
4th
International Conference on Neurorehabilitation
ICNR - T4 - SS24. Array electrode for the assessment of muscle functions; When, where and
why? – Room Fermi
Organizers Dejan B. Popović, Lana Popović Maneski
Authors Title
Dejan Popović, Ivan Topalovic, Suzana
Dedijer Dujovic and Ljubica Konstantinović
Wearable System for the Gait Assessment in Stroke
Patients
Babak Afsharipour, Subaryani Soedirdjo
and Roberto Merletti
Eliminating the bottleneck of sEMG recordings:
Array electrodes
Jacques Duchateau Muscle Fatigability: What, Why and How it
Constrains Motor Performance
Lana Popovic-Maneski and Ivan Topalovic EMG Map for Designing the Electrode Shape for
Functional Electrical Therapy of Upper Extremities
Jernej Kranjec and Ales Holobar
Advanced signal processing techniques for multi-
channel EMG – on the need for motor unit action
potential compensation
Catherine Disselhorst-Klug, Sybele
Williams and Sylvie von Werder
Surface Electromyography Meets Biomechanics or
Bringing sEMG to Clinical Application
Strahinja Dosen, Gauravkumar Patel,
Claudio Castellini, Janne Hahne and Dario
Farina
A novel physiologically-inspired method for
myoelectric prosthesis control using pattern
classification
WeR1. Wearable sensors for robotic exoskeletons – Room Galilei
Organizers Andrea Mannini and Simona Crea, Assistant Professor, The
BioRobotics Institute, Scuola Superiore Sant’Anna
Authors Title
Muhammad Raza Ul Islam, Kun Xu and
Shaoping Bai
Position sensing and control with FMG sensors for
exoskeleton physical assistance
Stefania Russo, Nicola Carbonaro and
Alessandro Tognetti
EIT-based tactile sensing patches for rehabilitation
and human machine interaction
Qining Wang Wearable sensors for motion recognition in
prosthetic control
Lucia Beccai Textile based mechanical sensors for wearables
Damiano Zanotto Machine Learning Regression Improves Accuracy
of Footwear-based Systems for Gait Analysis
Grega Logar, Zoran Ivanić and Marko
Munih
Wearable sensory apparatus performance while
using inertial measurement units
WeR6. Flexible and Transparent Technologies for Innovative Wearable Robotics – Room C
Organizers Anselmo Frizera Neto, Federal University of Espirito Santo (Brazil);
Carlos A. Cifuentes, Colombian School of Engineering (Colombia)
Authors Title
Arnaldo G. Leal-Junior, Anselmo Frizera,
Carlos Marques and Maria José Pontes
Development of Polymer Optical Fiber Sensors for
Lower Limb Exoskeletons Instrumentation
Miguel Manchola, Daya Serrano, Daniel
Gomez, Felipe Ballen, Diego Casas,
T-FLEX: Variable Stiffness Ankle-Foot Orthosis for
Gait Assistance

4th
International Conference on Neurorehabilitation
Marcela Munera and Carlos A. Cifuentes
Tom Verstraten, Raphaël Furnémont, Pablo
López-García, Stein Crispel, Bram
Vanderborght and Dirk Lefeber
A Series Elastic Dual-Motor Actuator Concept for
Wearable Robotics
Matteo Sposito, Stefano Toxiri, Darwin
Gordon Caldwell, Jesus Ortiz and Elena De
Momi
Towards Design Guidelines for Physical Interfaces
on Industrial Exoskeletons: Overview on Evaluation
Metrics
Wilian Miranda Dos Santos and Adriano
Siqueira
Design and Control of a Transparent Lower Limb
Exoskeleton
Shaoping Bai, Simon Christensen,
Muhammad Islam, Sajid Rafique, Nauman
Masud, Per Mattsson, Leonard .O'Sullivan
and Valerie Power
Development and testing of full-body exoskeleton
AXO-SUIT for physical assistance of the elderly
WeR10. Smart human-machine systems for lower-limb assistance and rehabilitation after
paralysis – Room Galilei
Organizers Jose Contreras-Vidal (University of Houston IUCRC BRAIN Center,
USA); Jose Azorin (Miguel Hernández University of Elche, Spain)
Authors Title
Ann M Spungen, EdD Update from on-going exoskeletal-assisted walking
clinical trials in chronic and acute spinal cord injury
Jose Azorin, Ph.D. Control of lower-body exoskeletons by combining
stimulation and decoding of motor imagery
Jose Contreras-Vidal, Ph.D.
Early findings from the NeuroRex trial: Neural
mechanisms of BMI adaptation in smart human-
machine systems
Gail F. Forrest, Arvind Ramanujam, Ann M.
Spungen, Christopher Cirnigliaro, Kamyar
Momeni, Syed R. Husain, Jonathan
Augustine, Erica Garbarini, Pierre K.
Asselin and Steven Knezevic
Exoskeleton Controller and Design Considerations:
Effect on Training Response for Persons with SCI
WeR11. Biorobotics approaches to understand and restore human balance – Room Galilei
Organizers Thomas Mergner, Vittorio Lippi and Diego Torricelli
Authors Title
Thomas Mergner and Vittorio Lippi
Human and Robot Posture Control should be
Combined when Neuro-Rehabilitation Devices
support Standing Balance
Guillaume Durandau, Herman van der Kooij
and Massimo Sartori
A computational framework for muscle-level
control of robotic ankle exoskeletons
Xinyao Hu, Chuang Luo, Dongsheng Peng
and Xingda Qu
A Conductive Fabric based Smart Insole to Measure
the Foot Pressure Distribution with High Resolution
Edwin van Asseldonk, Amber Emmens,
Tycho Brug, Iolanda Pisotta, Matteo
Arquilla, Federica Tamburella, Marcella
Masciullo, Nevio Tagliamonte, Romain
Valette, Marco Molinari and Herman van
der Kooij
Training balance recovery in people with
incomplete SCI wearing a wearable exoskeleton

4th
International Conference on Neurorehabilitation
Andre Seyfarth, Maziar Sharbafi, Guoping
Zhao and Christian Schumacher
Modular Composition of Human Gaits Through
Locomotor Subfunctions and Sensor-Motor-Maps
Maximo Roa Model-Based Posture control for a Torque-
Controlled Humanoid Robot
Prof. M. Chiara Carrozza Scuola Superiore Sant’Anna
Prof. Maria Chiara Carrozza received the Laurea degree in physics from the University of Pisa,
Italy, in 1990 and the PhD in Engineering at Scuola Superiore Sant’Anna (SSSA), in 1994. Since
November 2006, she is Full Professor of Biomedical Engineering and Robotics at Scuola Superiore
Sant’Anna. Since Nov. 2004 to Oct. 2007, she was Director of the Research Division and elected
Member of the national Board of the Italian association of Biomedical Engineering. Since Nov.
2007, she is Rector of Scuola Superiore Sant’Anna. She was visiting professor at the Technical
University of Wien, Austria, with a graduate course entitled Biomechatronics, she is involved in the
scientific management of the Italy-Japan joint laboratory for Humanoid Robotics ROBOCASA,
Waseda University, Tokyo, and she is Guest Professor at the Zhejiang University, Hangzhou,
China. She has scientific and coordination responsibilities within several research projects, funded
under the Sixth and Seventh Framework Programme of the European Union (some recent projects
are CYBERLEGs, WAY, CogLaboration, Nanobiotouch, Evryon, SmartHand, Nanobiotact,
Neurobotics, RobotCub, CyberHand) and under national and regional programmes (some recent
projects are OPERA, EARLYRehab, AMulos, OpenHand, Tectum, Rita, Safehand, Neuro-Bike).
Since 2004 to 2007, she was the Coordinator of the ARTS Lab of SSSA. In the period 2006-2011
she supervised more than 45 PhD, Master and Bachelor theses and she currently leads a group of
about 35 researchers, PhD students and research assistants. She is author of several scientific papers
(more than 85 ISI papers and more than 150 papers in referred conference proceedings) and of 12
national and international patents. She served as Editor of at least 4 Special Issues of International
Journals, as Member of Committees for at least 13 International Conference organizations, she gave
more than 50 invited lectures and plenary speeches to national and international conferences, and
she is a recipient of at least 11 awards. She is member and of the IEEE Robotics and Automation
Society (RAS) and of the IEEE Engineering in Medicine and Biology. She is member of the RAS
Technical Committee “Micro/Nano Robotics and Automation”. Her research interests are in
ambient assisted living, technical aids, biorobotics, rehabilitation engineering, bionics, cybernetic
hands, humanoid robotics, systems for functional replacements and
augmentation, biomechatronic interfaces, tactile sensors, artificial skin,
harvesting microtechnologies, human touch.
Prof. Michael Goldfarb
PLENARY LECTURES

4th
International Conference on Neurorehabilitation
Vanderbilt University
Title: Low-Power Approaches to Wearable Robotics for Minimizing Physical Disability
Abstract: This talk will describe ongoing work in the design and control of prostheses and
exoskeletons intended to restore functionality or mobility to individuals with limb loss or
neuromuscular impairment. In contrast to previously described approaches involving “fully-
powered” wearable devices, this talk will explore opportunities in the development of low-power
approaches to the design and control of wearable robotics, where the robotic devices employ semi-
powered and/or modulated-passive behaviors that function in combination with power from the user
in an effort to provide assistive functionality in a lower-weight and/or more compact package
relative to fully-powered approaches. Such devices do not replace or displace fully-powered
approaches, but offer a complement to them along the continuum of care that perhaps trades range
of functionality for smaller size and lower weight.
Short CV: Michael Goldfarb received the B.S. degree in mechanical engineering from the
University of Arizona, Tucson, in 1988, and the S.M. and Ph.D. degrees in mechanical engineering
from Massachusetts Institute of Technology, Cambridge, in 1992 and 1994, respectively.
Since 1994, he has been with the Department of Mechanical Engineering, Vanderbilt University,
Nashville, TN, where he is currently the H. Fort Flowers Professor. His research interests include
the design and control of advanced upper and lower extremity prostheses, and gait restoration for
spinal cord injured persons.
Prof. Katja Mombaur
Heidelberg University
Katja Mombaur is a full professor at the Institute of Computer Engineering (ZITI) of Heidelberg
University and head of the Optimization in Robotics & Biomechanics (ORB) group as well as the
Robotics Lab. She holds a diploma degree in Aerospace Engineering from the University of
Stuttgart and a Ph.D. degree in Mathematics from Heidelberg University. She was a postdoctoral
researcher in the Robotics Lab at Seoul National University, South Korea. She also spent two years
as a visiting researcher in the Robotics department of LAAS-CNRS in Toulouse. Katja Mombaur is
coordinator of the newly founded Heidelberg Center for Motion Research. She also is PI in the
European H2020 project SPEXOR and the Graduate School HGS MathComp as well as in several
national projects. Until recently, she has coordinated the EU FP7 project KoroiBot and was PI in the

4th
International Conference on Neurorehabilitation
EU projects MOBOT and ECHORD–GOP. She is founding chair of the IEEE RAS technical
committee Model-based optimization for robotics. Her research focuses on understanding human
movement and using this knowledge to improve motions of humanoid robots and in the interactions
of humans with exoskeletons, prostheses and external physical devices. Her particular interest is on
dynamic motions such as walking, running, and other kinds of motions in sports, as well as motions
of daily life. She and her team use and develop dynamic models and optimization methods for
motion studies, based on the assumption that human movement is optimal. In this context they are
also interested in inverse optimal control which can determine what a human is optimizing in a
given situation.
Dr. Marcia K. O’Malley
Rice University
Dept. of Mechanical Engineering
Title: Enhancing Human Performance with Wearable Haptics
Abstract: Haptic feedback has long been known to improve human performance during
teleoperation tasks, where an individual can intuitively control a remote robot with visual and tactile
feedback. With increasingly mobile sensing and actuation technologies, wearable haptics offer new
opportunities for enhancing human performance outside of a typical laboratory setting. This talk
will describe a number of different haptic feedback modalities, including kinesthetic feedback,
vibration, and skin stretch, that can be embedded in wearable systems and integrated with robotic
devices. A number of application domains will be discussed that highlight the potential for wearable
haptics to restore lost sensory function, promote recovery from injury, and enhance human
capabilities through novel training methods.
Short CV: Marcia O’Malley received the B.S. degree in mechanical engineering from Purdue
University in 1996, and the M.S. and Ph.D. degrees in mechanical engineering from Vanderbilt
University in 1999 and 2001, respectively. She is currently Professor of Mechanical Engineering
and of Computer Science at Rice University and directs the Mechatronics and Haptic Interfaces
Lab. She is an Adjunct Associate Professor in the Departments of Physical Medicine and
Rehabilitation at both Baylor College of Medicine and the University of Texas Medical School at
Houston. Additionally, she is the Director of Rehabilitation Engineering at TIRR-Memorial
Hermann Hospital, and is a co-founder of Houston Medical Robotics, Inc. Her research addresses
issues that arise when humans physically interact with robotic systems, with a focus on training and
rehabilitation in virtual environments. In 2008, she received the George R. Brown Award for
Superior Teaching at Rice University. O’Malley is a 2004 ONR Young Investigator and the
recipient of the NSF CAREER Award in 2005. She is a Fellow of the American Society of
Mechanical Engineers.

4th
International Conference on Neurorehabilitation
Dr. Marco Santello
School of Biological and Health Systems Engineering
Arizona State University
Title: Sensorimotor hand function: Bridging the gap between control mechanisms and clinical
translation
Abstract: The sophistication of the hand’s neuromuscular system, while making it incredibly
versatile, also challenges our ability to improve sensorimotor deficits caused by neurodegenerative
disease, e.g., stroke, or replace basic function following traumatic injury, e.g., limb loss. Given
these challenges, understanding fundamental sensorimotor control mechanisms is critical to
optimize translational efforts and clinical outcomes.
Sensorimotor hand function can be described as a multidimensional space where mechanical,
neural, and cognitive factors interact to enable a rich repertoire of actions – from skilled
manipulation and playing musical instruments, to perceiving properties of our environment through
exploratory procedures. Within this repertoire of actions, dexterous object manipulation is a
hallmark of human evolution. Co-adaptation of anatomical features and sensorimotor control
mechanisms have made dexterous manipulation an effective means of interacting with the
environment. Humans’ ability to perform dexterous manipulation has also inspired research efforts
aiming at building dexterous robotic and prosthetic hands, and devices for rehabilitation of hand
function.
My laboratory strives to bridge basic and applied research on hand function by investigating
mechanisms underlying grasping and dexterous manipulation, and developing experimental
approaches to improve sensorimotor function. In my presentation, I will review insights obtained
from research on control of the hand’s multiple degrees of freedom, interaction between feedback
and feedforward force control mechanisms, and neural constraints on learning and transfer of
dexterous manipulation. This work will be discussed in the context of clinical applications with
emphasis on prosthetics, brain-machine interfaces, enhancement of sensorimotor learning processes
through non-invasive neuromodulation, and directions for future research.
Short CV: Marco Santello received a Bachelor in Kinesiology from the University of L’Aquila,
Italy, in 1990 and a Doctoral degree in Sport and Exercise Science from the University of
Birmingham (U.K.) in 1995. After a post-doctoral fellowship at the Department of Physiology (now
Neuroscience) at the University of Minnesota, he joined the Department of Kinesiology at Arizona
State University (ASU) (1999-2010). He is currently Professor of Biomedical Engineering,
Director, and Harrington Endowed Chair at the School of Biological and Health Systems
Engineering. His main research interests are motor control, learning, haptics, and multisensory
integration. His Neural Control of Movment laboratory uses complementary research approaches,
ranging from non-invasive neuromodulation transcranial magnetic stimulation to motion tracking,
electroencephalography, and virtual reality environments. His work (100+ publications) has been
published in neuroscience and engineering journals, and has been supported by the National
Institutes of Health, the National Science Foundation, DARPA, the Whitaker Foundation, The
Mayo Clinic, and Google. He has served as grant reviewer for US and European funding agencies,
Associate Editor for Neuroscience and Biomedical Engineering, and member of the Editorial Board

4th
International Conference on Neurorehabilitation
of the Journal of Assistive, Rehabilitative and Therapeutic Technologies. He is a member of the
Society for Neuroscience, the Society of Neural Control of Movement, and IEEE.
Dr. Stephen Scott
GSK Chair in Neuroscience
Centre for Neuroscience Studies
Queen’s University
Title: Potential of Robotic Technology to Assess Brain Function and Dysfunction
Abstract: Clinical assessment plays a crucial role in all facets of patient care, from diagnosing the
specific disease or injury, to management and monitoring of rehabilitation strategies to ameliorate
dysfunction. Most assessment scales for sensorimotor function are subjective in nature with
relatively coarse rating systems, reflecting that it is difficult for even experienced observers to
discriminate consistently small changes in performance using only the naked eye. Our general
hypothesis is that robotic technologies can provide an objective approach to quantify sensory, motor
and cognitive impairments. We developed a robotic device called KINARM, an exoskeleton robot
that is attached to the arm and permits movements at the shoulder and elbow joints in the horizontal
plane. The system includes two KINARM robots to assess each arm, and an integrated virtual
reality system that projects objects onto the horizontal workspace. We have also developed other
robotic platforms for clinical assessment including end-point robots that can be grasped by the
subjects, and systems that can be used while standing to assess coordination between voluntary
control of the arms and whole-body balance control. Eye-tracking technologies can also be
integrated into the systems to quantify oculomotor function and eye-hand coordination. Integral to
our approach is a suite of behavioural tasks to quantify sensory, motor and cognitive impairments
including automated scoring systems to compare subject performance to healthy controls
considering factors such as age, sex and handedness. These platforms are being used to quantify
impairments in many disorders/injuries including stroke, ALS, Parkinson’s disease, Multiple
Sclerosis, transient ischemic attack, migraine, concussion, and assess brain function in non-primary
neurological disorders including cardiac arrest, pre- and post-operative assessments and kidney
failure.
Short CV: His research focuses on how different regions of the brain are involved in motor control
and learning. He has developed a robotic device called KINARM that can both sense and perturb
planar arm movements. One of his research labs examines neural activity in different brain regions
of non-human primates during motor behavior. A second lab explores human motor performance
and learning. A third lab located at St. Mary’s of the Lake Hospital is used to quantify sensorimotor
impairments in stroke and other neurological disorders.
Prof. Herman van der Kooij
University of Twente
4th
International Conference on Neurorehabilitation
Title: Human Inspired Control of Exoskeletons
Prof. Dr. ir. Herman van der Kooij, chairs the BioMechatronics group of more than 20 people and is
vice head of the department of Biomechanical Engineering in that employs more than sixty people.
He received his Phd with honors (cum laude) in 2000 and is professor in Biomechatronics and
Rehabilitation Technology at the Department of Biomechanical Engineering at the University of
Twente (0.8 fte), and Delft University of Technology (0.2fte), the Netherlands. His expertise and
interests are in the field of human motor control, adaptation, and learning, rehabilitation and
wearable robots, diagnostic, and assistive robotics, virtual reality, rehabilitation medicine, and neuro
computational modeling. He has published over 200 publications in the area of biomechatronics and
human motor control. He is frequently invited as (keynote) speaker at international conferences.
He was awarded the prestigious Dutch VIDI and VICI personnel grants in 2001 and 2015
respectively. He is associate editor of IEEE TBME and IEEE Robotics and Automation Letters,
member of IEEE EMBS technical committee of Biorobotics and of the advisory board of the IEEE
conference BIOROB, chair of IEEE BIOROB2018, and was member of numerous scientific
program committees in the field of rehabilitation robotics, bio robotics, and assistive devices. He
participated in seven EU projects and was the coordinator of the European FP7 project Symbitron.
Currently he coordinates the national program Wearable Robotics and the national 4TU Soft
Robotics program.
- ICNR Best conference paper sponsored by OSSUR
- ICNR Best student paper sponsored by PRENSILIA
- WeRob Best conference paper sponsored by SPEEDSMART
- WeRob Best student paper sponsored by IUVO
- Best poster sponsored by OT BIOELETTRONICA
- Best demo sponsored by KINETEK WEARABLE ROBOTICS
AWARDS
4th
International Conference on Neurorehabilitation
TUESDAY 16 OCT
Masashi Sekine, Kazuya
Kawamura and Wenwei Yu
Optimizing body thickness of
watchband-type soft pneumatic
actuator for feedback of prosthesis
grasping force
WeR2. Soft Wearable
Robots
John Nassour, Sidhdharthkumar
Vaghani and Fred Hamker
Design of Soft Exosuit for Elbow
Assistance Using Butyl Tubes
Rubber and Textile
WeR2. Soft Wearable
Robots
Domenico Chiaradia, Michele
Xiloyannis, Massimiliano
Solazzi, Lorenzo Masia and
Antonio Frisoli
Comparison of a Soft Exosuit and a
Rigid Exoskeleton in an Assistive
Task
WeR2. Soft Wearable
Robots
Ivanka Veneva, Dimitar
Chakarov, Michail Tsveov and
Pavel Venev
Exoskeleton with Soft Actuation
and Haptic Interface
WeR2. Soft Wearable
Robots
Yi Sun, Aaron Jing Yuan Goh,
Miao Li, Hui Feng, Jin Huat
Low, Marcelo H. Ang. Jr and
Raye Chen Hua Yeow
Improved Fabrication of Soft
Robotic Pad for Wearable Assistive
Devices
WeR2. Soft Wearable
Robots
Rainier Natividad, Tiana Miller-
Jackson, Wai Hong Sin
and Chen-Hua Yeow
The Exosleeve: A Soft Robotic
Exoskeleton for Assisting in
Activities of Daily Living
WeR2. Soft Wearable
Robots
Jong-Won Lee, Juwhan Bae,
Chilyong Kwon and Gyoosuk
Kim
The Effect of Negative Damping at
the Hip Joint during Level
Walking: A Preliminary Testing
WeR3. Subject-centered
based approaches for
controlling Wearable
Robots
Maria Lazzaroni, Stefano Toxiri,
Darwin Caldwell, Elena De
Momi and Jesús Ortiz
Overview and challenges for
controlling back-support
exoskeletons
WeR3. Subject-centered
based approaches for
controlling Wearable
Robots
Nicola Secciani, Matteo Bianchi,
Alessandro Ridolfi, Federica
Vannetti and Benedetto Allotta
Assessment of a hand exoskeleton
control strategy based on user’s
intentions classification starting
from surface EMG signals
WeR3. Subject-centered
based approaches for
controlling Wearable
Robots
Olivier Bordron, Clément
Huneau, Eric Le Carpentier and
Yannick Aoustin
Contribution of a Knee Orthosis
over Walking
WeR3. Subject-centered
based approaches for
controlling Wearable
Robots
Titus Hanson, Chris Bitikofer,
Bahram Sobbi and Joel Perry
Design of MobIle Digit Assistive
System (MIDAS): A Passive Hand
Extension Exoskeleton for Post
Stroke Rehabilitation
WeR3. Subject-centered
based approaches for
controlling Wearable
Robots
Marko Jamšek and Jan Babič Human trunk stabilization with hip
exoskeleton for enhanced postural
control
WeR4. Robotic and
neuroprosthetic balance
management approaches
for walking assistance
POSTER SESSION

4th
International Conference on Neurorehabilitation
Amre Eizad, Muhammad Raheel
Afzal, Hosu Lee, Sung-Ki Lyu
and Jungwon Yoon
Development of a Wearable Haptic
Feedback System for Limb
Movement Symmetry Training
WeR4. Robotic and
neuroprosthetic balance
management approaches
for walking assistance
WEDNESDAY 17 OCT
Bertine M. Fleerkotte,
Jaap Buurke, Edwin
H. F. Van Asseldonk
and Johan. S. Rietman
The effect of assist-as-needed
support on energy expenditure
during gait training of chronic
stroke patients in LOPESII
SS10. The use of ambulant technology
in stroke rehabilitation
SS5. Improving Strategies for Human-
Robot Interaction for Rehabilitation
Robotics applications
SS6. Increasing the exercise intensity
during gait training
SS7. Shaping robotic training to
maximize patient outcome: new trends
and perspectives
SS8. Neurorehabilitation from clinical
perspective and robotic perspective:
Contradictions and Integrations
Gabriel Aguirre
Ollinger, Ashwin
Narayan, Francisco
Anaya Reyes, Hsiao-
Ju Cheng and
Haoyong Yu
An Integrated Robotic Mobile
Platform and Functional
Electrical Stimulation System
for Gait Rehabilitation Post-
Stroke
SS10. The use of ambulant technology
in stroke rehabilitation
SS6. Increasing the exercise intensity
during gait training
Rahul Kumar Singh,
Rejin John Varghese,
Jindong Liu, Zhiqiang
Zhang and Benny Lo
A Multi-sensor Fusion
Approach for Intention
Detection
SS11. Redundancy and modularity in
motor control: neuroscience,
prosthetic, rehabilitative and assistive
approaches
SS5. Improving Strategies for Human-
Robot Interaction for Rehabilitation
Robotics applications
Jonas Schröder, Sara
Kenis, Kris Goos,
Steven Truijen and
Wim Saeys
The effects of exoskeleton-
assisted overground gait
training in chronic stroke – a
pilot study
SS11. Redundancy and modularity in
motor control: neuroscience,
prosthetic, rehabilitative and assistive
approaches
SS5. Improving Strategies for Human-
Robot Interaction for Rehabilitation
Robotics applications
SS6. Increasing the exercise intensity
during gait training
SS7. Shaping robotic training to
maximize patient outcome: new trends
and perspectives

4th
International Conference on Neurorehabilitation
Silvia E. Rodrigo and
Claudia N. Lescano
The possible role of foot sole
mechanoreceptors for gait
neurorehabilitation. I – A
review
SS11. Redundancy and modularity in
motor control: neuroscience,
prosthetic, rehabilitative and assistive
approaches
SS5. Improving Strategies for Human-
Robot Interaction for Rehabilitation
Robotics applications
SS6. Increasing the exercise intensity
during gait training
SS7. Shaping robotic training to
maximize patient outcome: new trends
and perspectives
SS8. Neurorehabilitation from clinical
perspective and robotic perspective:
Contradictions and Integrations
Claudia N. Lescano
and Silvia E. Rodrigo
The possible role of foot sole
mechanoreceptors for gait
neurorehabilitation. II – A
dynamometric map of the foot
sole
SS11. Redundancy and modularity in
motor control: neuroscience,
prosthetic, rehabilitative and assistive
approaches
SS5. Improving Strategies for Human-
Robot Interaction for Rehabilitation
Robotics applications
SS6. Increasing the exercise intensity
during gait training
SS7. Shaping robotic training to
maximize patient outcome: new trends
and perspectives
SS8. Neurorehabilitation from clinical
perspective and robotic perspective:
Contradictions and Integrations
N. Alberto Borghese,
Jacopo Essenziale,
Manuel Pezzera,
Alessandro Tironi,
Renato Mainetti,
Roberta Cazzaniga,
Barbara Reggiori,
Simone Mercurio and
Paolo Confalonieri
Design and development of a
web-based platform for
comprehensive autonomous
home rehabilitation
management in multiple
sclerosis
SS11. Redundancy and modularity in
motor control: neuroscience,
prosthetic, rehabilitative and assistive
approaches
SS6. Increasing the exercise intensity
during gait training
Sabata Gervasio,
Kristian Hennings and
Natalie Mrachacz-
Kersting
Exploring the EEG signatures
of musculoskeletal pain
SS13. Neural Signal Analysis: Novel
Approaches to Understanding Brain
Diseases
Josep Dinarès-Ferran,
Marc Sebastián
Romagosa, Rupert
Ortner, Armin
Schnuerer, Christoph
Guger and Jordi Solé-
Casals
Exploring bands suppression in
artificial frames for a MI BCI
SS13. Neural Signal Analysis: Novel
Approaches to Understanding Brain
Diseases

4th
International Conference on Neurorehabilitation
Elsa Fernandez, Jordi
Solé-Casals, Pilar
Calvo, Marcos
Faundez-Zanuy and
Karmele López-De-
Ipiña
HAIDA: Biometric
technological therapy tools for
neurorehabilitation of
Cognitive Impairment
SS13. Neural Signal Analysis: Novel
Approaches to Understanding Brain
Diseases
Maria Marcella
Laganà, Alice
Pirastru, Laura
Pelizzari, Monia
Cabinio, Anna
Castagna, Valeria
Blasi and Francesca
Baglio
The Impact of a Connectogram
Based Visualization of the
Motor Network in a case of
Cervical Dystonia: role in the
clinical interpretation and
therapeutic approach
SS13. Neural Signal Analysis: Novel
Approaches to Understanding Brain
Diseases
Hiroshi R Yamasaki,
Ken-Ichi Ozaki,
Alvaro Costa-Garcia,
Matti Itkonen, Shotaro
Okajima, Masanori
Tanimoto, Ikue Ueda,
Kazuya Usami,
Masaki Kamiya,
Hiroshi Matsuo, Aiko
Osawa, Izumi Kondo
and Shingo Shimoda
Tuning of Homologous Muscle
Coupling during Bimanual
Steering Tasks in Slow Speed:
A Pilot Study
SS13. Neural Signal Analysis: Novel
Approaches to Understanding Brain
Diseases
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
Sylvain Cremoux,
Dimitri Elie, Cecilie
Rovsing, Helene
Rovsing, Mads
Jochumsen and Imran
Khan Niazi
Functional and
Corticomuscular Changes
Associated with Early Phase of
Motor Training
SS13. Neural Signal Analysis: Novel
Approaches to Understanding Brain
Diseases
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
Daniele Giansanti and
Giovanni Maccioni
Improving postural stability by
means of novel multimodal
biofeedback system based on
an Inertial Measurement Unit
SS13. Neural Signal Analysis: Novel
Approaches to Understanding Brain
Diseases
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
SS15. Modeling Joint
Neuromechanics and Its Applications:
System Identification Approach
SS16. Machine Learning in
NeuroRehabilitation
SS17. Non-Invasive Stimulation At
Different Level Of Nervous Sytem In
Neurorehabilitation
SS18. Cognitive approaches for
rehabilitation of patients with
neurological disorders

4th
International Conference on Neurorehabilitation
Daniele Giansanti and
Giovanni Maccioni
The Text Neck: Can
smartphone Apps with
biofeedback aid in the
prevention of this syndrome
SS13. Neural Signal Analysis: Novel
Approaches to Understanding Brain
Diseases
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
SS15. Modeling Joint
Neuromechanics and Its Applications:
System Identification Approach
SS16. Machine Learning in
NeuroRehabilitation
SS17. Non-Invasive Stimulation At
Different Level Of Nervous Sytem In
Neurorehabilitation
SS18. Cognitive approaches for
rehabilitation of patients with
neurological disorders
Álvaro Costa, Hiroshi
Yamasaki, Matti
Itkonen, Shotaro
Okajima and Shingo
Shimoda
sEMG frequency analysis to
evaluate changes in the
recruitment of fast-twitch
muscles fibers during elbow
flexion motions.
SS13. Neural Signal Analysis: Novel
Approaches to Understanding Brain
Diseases
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
SS18. Cognitive approaches for
rehabilitation of patients with
neurological disorders
Olga Trofimova,
Anaïs Mottaz and
Adrian G. Guggisberg
Resting-state alpha-band
functional connectivity predicts
implicit motor adaptation in a
Serial Reaction Time Task
SS13. Neural Signal Analysis: Novel
Approaches to Understanding Brain
Diseases
SS18. Cognitive approaches for
rehabilitation of patients with
neurological disorders
Tamaya Van
Criekinge, Wim
Saeys, Kyra
Blankaert, Zoë
Maebe, Charlotte van
der Waal, Marijke
Vink, Willem De
Hertogh and Steven
Truijen
The effect of trunk training on
trunk control, standing balance
and gait: A systematic review
and meta-analysis
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
Tamaya Van
Criekinge, Wim
Saeys, Ann Hallemans
and Steven Truijen
Trunk kinematics during
walking after sub-acute stroke
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
Cristian Camardella,
Luis Pelaez Murciego,
Shangjie Tang,
Federica Bertolucci,
Carmelo Chisari,
Michele Barsotti and
Simple tool for functional and
physiological stroke patients
assessment
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation

4th
International Conference on Neurorehabilitation
Antonio Frisoli
Erika D'Antonio,
Gaetano Tieri, Stefano
Paolucci, Fabrizio
Patané and Marco
Iosa
Postural sway responses to 3D
virtual dynamic visual
stimulation in post-stroke
patients
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
Serena Ricci, Aaron
Bruce Nelson, Elisa
Tatti, Giulio Tononi,
Chiara Cirelli and M.
Felice Ghilardi
The neural effects of extended
practice and the benefits of a
nap
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
Elisa Galofaro, Robert
A Scheidt, Ferdinando
A. Mussa-Ivaldi and
Maura Casadio
Testing the ability to represent
and control a contact force
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
Paolo Meriggi, Elena
Brazzoli, Tecla
Piacente, Marcella
Mazzola and Ivana
Olivieri
Smart Objects in Pediatric
Rehabilitation: some
Preliminary Results from a
Research Protocol
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
Mattia Corzani,
Alberto Ferrari, Pieter
Ginis, Alice
Nieuwboer and
Lorenzo Chiari
Analysis of Biofeedback
Effects in Parkinson’s disease
at Multiple Time-Scales
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
Daniele Coraci,
Marco Paoloni,
Massimiliano
Mangone, Chiara
Iacovelli, Francesco
Ruggeri, Valter
Santilli and Luca
Padua
Proposal of a method
supporting the interpretation of
gait analysis kinematic data.
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
Alice Mantoan,
Stefano Lai, Lucia
Moro, Alessandro
Pietro Bardelli,
Michela Ugazzi,
Andrea Turolla and
Luca Ascari
A preliminary study on
quantitative assessment of
functional tasks on stroke
patients using a novel wearable
platform
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
Andrea Zonnino and
Fabrizio Sergi
Model-based estimation of
individual muscle force given
an incomplete set of muscle
activity measurements
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
SS15. Modeling Joint
Neuromechanics and Its Applications:
System Identification Approach
4th
International Conference on Neurorehabilitation
Raffaele Conte,
Alessandro Tonacci,
Francesco Sansone,
Gianluca Diodato,
Maria Cristina
Scudellari, Andrea
Grande, Anna Paola
Pala, Guja Astrea,
Silvia Frosini and
Filippo Maria
Santorelli
PhysioTest: a dedicated
module to collect data from
physiotherapy assessments in
neuromuscular diseases
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
SS16. Machine Learning in
NeuroRehabilitation
Hamidreza Barnamei Effect of motor nerve on lower
limb coordination variability
during high-heel and barefoot
gait
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
SS17. Non-Invasive Stimulation At
Different Level Of Nervous Sytem In
Neurorehabilitation
Oscar I. Caldas, Oscar
F. Avilés, Mauricio
Mauledoux and Carlos
Rodriguez
Closed-loop system with
biofeedback for engagement
control in virtual rehabilitation
SS22. Pattern Recognition Techniques
for assessment, training and
rehabilitation
Ilaria Bortone,
Domenico
Buongiorno,
Giuseppina Lelli,
Andrea Di Candia,
Giacomo Donato
Cascarano, Gianpaolo
Francesco Trotta,
Pietro Fiore and
Vitoantonio
Bevilacqua
Gait Analysis and Parkinson’s
Disease: Recent trends on main
applications in healthcare
SS22. Pattern Recognition Techniques
for assessment, training and
rehabilitation
Jichai Jeong and
Sunghee Dong
Intra-Subject Invariant
Classification Modeling for
Spectral Features in EEG
signals using Decision Fusion
Method
SS22. Pattern Recognition Techniques
for assessment, training and
rehabilitation
Aitziber Mancisidor,
Asier Brull, Asier
Zubizarreta, Itziar
Cabanes, Ana
Rodriguez and Je
Hyung Jung
Measurement of
complementary trunk
movement in robot-mediated
upper limb rehabilitation
SS5. Improving Strategies for Human-
Robot Interaction for Rehabilitation
Robotics applications
Ana Cisnal de La
Rica, Rubén Alonso
Alonso, Javier P.
Turiel, Juan-Carlos
Fraile Marinero,
Víctor Lobo Granado
and Víctor Moreno
San Juan
EMG based bio-cooperative
direct force control of an
exoskeleton for hand
rehabilitation: A preliminary
study
SS5. Improving Strategies for Human-
Robot Interaction for Rehabilitation
Robotics applications

4th
International Conference on Neurorehabilitation
Fiorenzo Artoni,
Elena Massai and
Silvestro Micera
EEG decoding of rest and
overground walking: a
feasibility study
SS5. Improving Strategies for Human-
Robot Interaction for Rehabilitation
Robotics applications
Christopher Bitikofer,
Parker Hill, Eric
Wolbrecht and Joel
Perry
Analysis of Shoulder
Displacement During
Activities of Daily Living and
Implications on Design of
Exoskeleton Robotics for
Assessment
SS5. Improving Strategies for Human-
Robot Interaction for Rehabilitation
Robotics applications
Parker Hill,
Christopher Bitikofer,
Shawn Trimble, Eric
Wolbrecht and Joel
Perry
PANDORA: Design of a 2
DOF Scapulohumeral
Exoskeleton Device to Support
Translation of the
Glenohumeral Joint
SS5. Improving Strategies for Human-
Robot Interaction for Rehabilitation
Robotics applications
Yijun Niu, Zhibin
Song and Jiansheng
Dai
A Novel Parallel Mechanism
for Self-aligning Knee
Exoskeleton
SS5. Improving Strategies for Human-
Robot Interaction for Rehabilitation
Robotics applications
Mostafa Mohammadi,
Romulus Lontic,
Thomas B. Moeslund,
Hendrik Knoche,
Thomas Bak, Michael
Gaihede, Bo Bentsen
and Lotte N. Stroijk
Andreasen
Controlling a Drone by the
Tongue – A Pilot Study on
Drone Based Facilitation of
Social Activities and Sports for
People with Complete
Tetraplegia
SS5. Improving Strategies for Human-
Robot Interaction for Rehabilitation
Robotics applications
Javier Gil, Andrea
Ortiz, Antonio Del-
Ama, José Luis Pons
and Juan C. Moreno
Testing FES of ankle
plantarflexor and dorsiflexor
muscles to support unilateral
gait disorders
SS5. Improving Strategies for Human-
Robot Interaction for Rehabilitation
Robotics applications
Stefano Mazzoleni,
Elena Battini,
Alessandro Rustici
and Giulia
Stampacchia
An overground robotic
exoskeleton gait training in
complete spinal cord injured
patients
SS5. Improving Strategies for Human-
Robot Interaction for Rehabilitation
Robotics applications
SS6. Increasing the exercise intensity
during gait training
SS7. Shaping robotic training to
maximize patient outcome: new trends
and perspectives
Matti Itkonen, Shotaro
Okajima, Hiroshi
Yamasaki, Alvaro
Costa and Shingo
Shimoda
Orchestration of Sensors and
Actuators in Neuro-
rehabilitation Experiments and
Practice
SS5. Improving Strategies for Human-
Robot Interaction for Rehabilitation
Robotics applications
SS7. Shaping robotic training to
maximize patient outcome: new trends
and perspectives
Kadir Ozlem, Ozgur
Atalay, Asli Atalay
and Gokhan Ince
Textile Based Sensing System
for Lower Limb Motion
Monitoring
SS5. Improving Strategies for Human-
Robot Interaction for Rehabilitation
Robotics applications
SS7. Shaping robotic training to
maximize patient outcome: new trends
and perspectives
SS8. Neurorehabilitation from clinical
perspective and robotic perspective:

4th
International Conference on Neurorehabilitation
Contradictions and Integrations
Joel Perry, Rene
Maura, Christopher
Bitikofer and Eric
Wolbrecht
BLUE SABINO: development
of a bilateral exoskeleton
instrument for comprehensive
upper-extremity neuromuscular
assessment
SS5. Improving Strategies for Human-
Robot Interaction for Rehabilitation
Robotics applications
SS7. Shaping robotic training to
maximize patient outcome: new trends
and perspectives
SS8. Neurorehabilitation from clinical
perspective and robotic perspective:
Contradictions and Integrations
Suncheol Kwon and
Won-Kyung Song
Inference of Proprioception
using Kinematics in Robot
Assisted Reach Exercise for
Chronic Stroke Survivor
SS5. Improving Strategies for Human-
Robot Interaction for Rehabilitation
Robotics applications
SS7. Shaping robotic training to
maximize patient outcome: new trends
and perspectives
SS8. Neurorehabilitation from clinical
perspective and robotic perspective:
Contradictions and Integrations
Pablo Lopez Garcia,
Stein Crispel, Tom
Verstraten, Elias
Saerens, Bryan
Convens, Bram
Vanderborght and
Dirk Lefeber
Automotive Methods and
Principles in the Development
of New Transmissions for
Wearable Robotics
WeR5. Benchmarking wearable robots
María Carmen
Sánchez-Villamañán,
Diego Torricelli and
José L. Pons
Modeling Human-Exoskeleton
Interaction: Preliminary
Results
WeR5. Benchmarking wearable robots
THURSDAY 18 OCT
Hosu Lee, Muhammad
Raheel Afzal, Sanghun
Pyo and Jungwon Yoon
A Novel Gait Assistance System
based on an Active Knee
Orthosis and a Haptic Cane for
Overground Walking
SS10. The use of ambulant
technology in stroke rehabilitation
SS9. Balance control during
walking-related motor tasks
Bethel Osuagwu, Sarah
Timms, Ruth Peachment,
Sarah Dowie, Helen
Thrussell, Susan Cross,
Tony Heywood, Rebecca
Shirley and Julian Taylor
Clinical trial of the Soft Extra
Muscle Glove to assess orthotic
and long-term functional gain
following chronic incomplete
tetraplegia: preliminary
functional results
SS11. Redundancy and modularity
in motor control: neuroscience,
prosthetic, rehabilitative and
assistive approaches
SS7. Shaping robotic training to
maximize patient outcome: new
trends and perspectives
SS8. Neurorehabilitation from
4th
International Conference on Neurorehabilitation
clinical perspective and robotic
perspective: Contradictions and
Integrations
Sabata Gervasio, Kristian
Hennings and Natalie
Mrachacz-Kersting
Exploring the EEG signatures of
musculoskeletal pain
SS13. Neural Signal Analysis:
Novel Approaches to
Understanding Brain Diseases
Josep Dinarès-Ferran,
Marc Sebastián
Romagosa, Rupert Ortner,
Armin Schnuerer,
Christoph Guger and
Jordi Solé-Casals
Exploring bands suppression in
artificial frames for a MI BCI
SS13. Neural Signal Analysis:
Novel Approaches to
Understanding Brain Diseases
Elsa Fernandez, Jordi
Solé-Casals, Pilar Calvo,
Marcos Faundez-Zanuy
and Karmele López-De-
Ipiña
HAIDA: Biometric
technological therapy tools for
neurorehabilitation of Cognitive
Impairment
SS13. Neural Signal Analysis:
Novel Approaches to
Understanding Brain Diseases
Maria Marcella Laganà,
Alice Pirastru, Laura
Pelizzari, Monia Cabinio,
Anna Castagna, Valeria
Blasi and Francesca
Baglio
The Impact of a Connectogram
Based Visualization of the Motor
Network in a case of Cervical
Dystonia: role in the clinical
interpretation and therapeutic
approach
SS13. Neural Signal Analysis:
Novel Approaches to
Understanding Brain Diseases
Hiroshi R Yamasaki,
Ken-Ichi Ozaki, Alvaro
Costa-Garcia, Matti
Itkonen, Shotaro
Okajima, Masanori
Tanimoto, Ikue Ueda,
Kazuya Usami, Masaki
Kamiya, Hiroshi Matsuo,
Aiko Osawa, Izumi
Kondo and Shingo
Shimoda
Tuning of Homologous Muscle
Coupling during Bimanual
Steering Tasks in Slow Speed: A
Pilot Study
SS13. Neural Signal Analysis:
Novel Approaches to
Understanding Brain Diseases
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
Sylvain Cremoux, Dimitri
Elie, Cecilie Rovsing,
Helene Rovsing, Mads
Jochumsen and Imran
Khan Niazi
Functional and Corticomuscular
Changes Associated with Early
Phase of Motor Training
SS13. Neural Signal Analysis:
Novel Approaches to
Understanding Brain Diseases
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation

4th
International Conference on Neurorehabilitation
Daniele Giansanti and
Giovanni Maccioni
Improving postural stability by
means of novel multimodal
biofeedback system based on an
Inertial Measurement Unit
SS13. Neural Signal Analysis:
Novel Approaches to
Understanding Brain Diseases
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
SS15. Modeling Joint
Neuromechanics and Its
Applications: System Identification
Approach
SS16. Machine Learning in
NeuroRehabilitation
SS17. Non-Invasive Stimulation At
Different Level Of Nervous Sytem
In Neurorehabilitation
SS18. Cognitive approaches for
rehabilitation of patients with
neurological disorders
Daniele Giansanti and
Giovanni Maccioni
The Text Neck: Can smartphone
Apps with biofeedback aid in the
prevention of this syndrome
SS13. Neural Signal Analysis:
Novel Approaches to
Understanding Brain Diseases
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
SS15. Modeling Joint
Neuromechanics and Its
Applications: System Identification
Approach
SS16. Machine Learning in
NeuroRehabilitation
SS17. Non-Invasive Stimulation At
Different Level Of Nervous Sytem
In Neurorehabilitation
SS18. Cognitive approaches for
rehabilitation of patients with
neurological disorders
Álvaro Costa, Hiroshi
Yamasaki, Matti Itkonen,
Shotaro Okajima and
Shingo Shimoda
sEMG frequency analysis to
evaluate changes in the
recruitment of fast-twitch
muscles fibers during elbow
flexion motions.
SS13. Neural Signal Analysis:
Novel Approaches to
Understanding Brain Diseases
SS14. New Frontiers in Movement
Analysis: from assessment to
rehabilitation
SS18. Cognitive approaches for
rehabilitation of patients with
neurological disorders
Olga Trofimova, Anaïs
Mottaz and Adrian G.
Guggisberg
Resting-state alpha-band
functional connectivity predicts
implicit motor adaptation in a
Serial Reaction Time Task
SS13. Neural Signal Analysis:
Novel Approaches to
Understanding Brain Diseases
SS18. Cognitive approaches for
rehabilitation of patients with
neurological disorders

4th
International Conference on Neurorehabilitation
Arantzazu San Agustín,
Guillermo Asín-Prieto
and José Luis Pons
Fatigue Compensating Muscle
Excitability Enhancement by
Transcranial Magnetic
Stimulation: A Case Report
SS17. Non-Invasive Stimulation At
Different Level Of Nervous Sytem
In Neurorehabilitation
Maria Paola Tramonti
Fantozzi, Fiorenzo
Artoni, Marco Di Galante,
Lucia Briscese, Vincenzo
De Cicco, Diego
Manzoni, Tommaso
Banfi, Silvestro Micera,
Ugo Faraguna and Maria
Chiara Carboncini
Possible effect of the trigeminal
nerve stimulation on auditory
event-related potentials
SS17. Non-Invasive Stimulation At
Different Level Of Nervous Sytem
In Neurorehabilitation
Elena Madinabeitia-
Mancebo, Antonio
Madrid, Javier Cudeiro
and Pablo Arias
M1 inhibition dependency on
slowing of muscle relaxation
after brief and fast fatiguing
repetitive movements:
Preliminary results
SS17. Non-Invasive Stimulation At
Different Level Of Nervous Sytem
In Neurorehabilitation
Yvona Angerova, Petra
Sladkova and Olga
Svestkova
Day Program for Patients with
Brain Injury with Constraint
Induced Movement Therapy For
Upper and Lower Limbs
SS17. Non-Invasive Stimulation At
Different Level Of Nervous Sytem
In Neurorehabilitation
Antonio Madrid, Elena
Madinabeitia-Mancebo,
Amalia Jácome, Javier
Cudeiro and Pablo Arias
Changes in excitability at the
level of M1, spinal cord and
muscle during 3 minutes of
finger tapping at the maximal
possible rate
SS17. Non-Invasive Stimulation At
Different Level Of Nervous Sytem
In Neurorehabilitation
Kasper Leerskov, Lotte
N. S. Andreasen Struijk
and Erika G. Spaich
Assessment of Plastic Changes
Following Bio-Robotic
Rehabilitation of Spinal Cord
Injured Individuals - A Protocol
Proposal
SS17. Non-Invasive Stimulation At
Different Level Of Nervous Sytem
In Neurorehabilitation
María Rodriguez-Cañón,
Ignacio Delgado, Raimon
Jane and Guillermo
García-Alías
Temporal categorization of
upper limb muscle’s EMG
activity during reaching and
grasping
SS17. Non-Invasive Stimulation At
Different Level Of Nervous Sytem
In Neurorehabilitation
Kouhei Moriya,
Tomofumi Yamaguchi,
Yohei Otaka, Kunitsugu
Kondo and Satoshi
Tanaka
Transcranial direct-current
stimulation combined with
attention to the paretic hand
improves hand performance in
stroke patients: a double-blind,
sham-controlled study
SS17. Non-Invasive Stimulation At
Different Level Of Nervous Sytem
In Neurorehabilitation
Yasuto Tanaka, Reina
Umeki and Norihiko Saga
Voluntary motor imagery
demonstrated in
electroencephalography and
electromyography
SS17. Non-Invasive Stimulation At
Different Level Of Nervous Sytem
In Neurorehabilitation
SS18. Cognitive approaches for
rehabilitation of patients with
neurological disorders
Mario Covarrubias
Rodriguez, Teodora
Cianferoni, Beatrice
Neuro Rehabilitation System
through Virtual Reality, Harp
Music and Fragrance Therapy
SS17. Non-Invasive Stimulation At
Different Level Of Nervous Sytem
In Neurorehabilitation

4th
International Conference on Neurorehabilitation
Aruanno, Mauro Rossini,
Sofya Komarova and
Franco Molteni
SS18. Cognitive approaches for
rehabilitation of patients with
neurological disorders
Sayaka Morishita,
Hidekatsu Ito and Suguru
N. Kudoh
Prefrontal Activity Evoked by
Transcranial Magnetic
Stimulations (TMS) Enhanced
by observing the behavior of
others.
SS17. Non-Invasive Stimulation At
Different Level Of Nervous Sytem
In Neurorehabilitation
SS18. Cognitive approaches for
rehabilitation of patients with
neurological disorders
Woosang Cho, Alexander
Heilinger, Rupert Ortner,
Nensi Murovec, Ren Xu,
Manuela Zehetner,
Johannes Gruenwald,
Stefan Schobesberger,
Armin Schnuerer and
Christoph Guger
Feasibility of Brain-Computer
Interface triggered Functional
Electrical Stimulation and
Avatar for Motor Improvement
in Chronic Stroke Patients
SS19. Multimodal neural interfaces
for rehabilitation and assistance of
people with disability
Juan A. Barios, Santiago
Ezquerro García, Arturo
Bertomeu-Motos, Jorge
A. Díez, Jose M. Catalán,
Luis D. Lledó and Nicolás
García-Aracil
Modulation of functional
connectivity evaluated by
surface EEG in alpha and beta
during a motor-imagery based
BCI task
SS19. Multimodal neural interfaces
for rehabilitation and assistance of
people with disability
Juan Antonio Barios,
Santiago Ezquerro García,
Arturo Bertomeu-Motos,
Luis Daniel Lledó Pérez,
Marius Nann, Surjo R.
Soekadar and Nicolas
Garcia-Aracil
Sensory feedback with a hand
exoskeleton increases EEG
modulation in a brain-machine
interface system
SS19. Multimodal neural interfaces
for rehabilitation and assistance of
people with disability
SS21. Uncovering neural
mechanisms of post-stroke
recovery using clinical imaging
tools
Andrea Crema, Ivan
Furfaro, Flavio Raschellà
and Silvestro Micera
Development of a hand
neuroprosthesis for grasp
rehabilitation after stroke: state
of art and perspectives
SS2. Translating research
prototypes to bedside: the lesson-
learnt of the RETRAINER EU
project
Nancy Immick, Emilia
Ambrosini, Andreas
Augsten, Mauro Rossini,
Giulio Gasperini, Davide
Proserpio, Franco
Molteni, Johannes Zajc,
Simona Ferrate,
Alessandra Pedrocchi and
Karsten Krakow
Hybrid Robotic System for Arm
Training after stroke:
preliminary results of a
randomized controlled trial
SS2. Translating research
prototypes to bedside: the lesson-
learnt of the RETRAINER EU
project
Jose Vicente Garcia
Perez, David Lopez,
Axier Ugartemendia,
Iñaki Diaz, Luis Daniel
Lledo, Andrea Blanco,
Juan Barios, Arturo
Bertomeu and Nicolas
Garcia Aracil
Evaluation of an upper-limb
rehabilitation robotic device for
home use from patient
perspective
SS8. Neurorehabilitation from
clinical perspective and robotic
perspective: Contradictions and
Integrations
4th
International Conference on Neurorehabilitation
Ghada Bani Musa, Adel
Al-Jumaily, Fady Alnajjar
and Shingo Shimoda
Upper Limb Recovery
Prediction After Stroke
Rehabilitation Based On
Regression Method
SS8. Neurorehabilitation from
clinical perspective and robotic
perspective: Contradictions and
Integrations
Jemina Fasola,
Mohammed Bouri,
Hannes Bleuler and Olaf
Blanke
Preliminary Study: Effects of
Visual Distortion on Standing
Balance Motion Amplitude and
Visual Dependency on an
Unstable Surface
SS9. Balance control during
walking-related motor tasks
Michela Picardi, Antonio
Caronni, Peppino Tropea,
Maria Montesano, Chiara
Pisciotta, Davide
Pareyson and Massimo
Corbo
Instrumented balance and gait
assessment in patients with CMT
peripheral neuropathy
SS9. Balance control during
walking-related motor tasks
Michelangelo Guaitolini,
Federica Aprigliano,
Andrea Mannini, Angelo
Sabatini and Vito Monaco
Effects of Gait Speed on the
Margin of Stability in Healthy
Young Adults
SS9. Balance control during
walking-related motor tasks
Je Hyung Jung and Jan
Veneman
Preliminary comparison study on
CoM and CoP paths between
healthy subject and stroke
patient while straight walking
SS9. Balance control during
walking-related motor tasks
Tommaso
Poliero, Stefano Toxiri,
Darwin G. Caldwell
and Jesús Ortiz
Actuator Optimization for a
Back-Support Exoskeleton: The
Influence of the Objective
Function
WeR12. Exoskeleton Research in
Europe
WeR2. Soft Wearable Robots
WeR8. Wearable robotic solutions
for factories of the future
Berkay Guncan
and Ramazan Unal
ANT-M: Design of Passive
Lower-limb Exoskeleton for
Weight-bearing Assistance in
Industry
WeR2. Soft Wearable Robots
WeR6. Flexible and Transparent
Technologies for Innovative
Wearable Robotics
WeR7. Wearable Robotics for
rehabilitation and assistance in
Latin America
WeR8. Wearable robotic solutions
for factories of the future
Andrea Stefano Ciullo,
Manuel Giuseppe
Catalano, Antonio Bicchi
and Arash Ajoudani
A Supernumerary Soft Robotic
Hand-Arm System for
Improving Worker Ergonomics
WeR2. Soft Wearable Robots
WeR8. Wearable robotic solutions
for factories of the future
Axel Koopman, Stefano
Toxiri, Michiel de Looze,
Idsart Kingma and Jaap
van Dieën
Effects of an inclination-
controlled active spinal
exoskeleton on spinal
compression forces
WeR8. Wearable robotic solutions
for factories of the future
Stefano Toxiri, Matteo
Sposito, Maria Lazzaroni,
Lorenza Mancini, Darwin
G. Caldwell and Jesús
Ortiz
Towards standard specifications
for back-support exoskeletons
WeR8. Wearable robotic solutions
for factories of the future
4th
International Conference on Neurorehabilitation
Daegeun Park, Jesus Ortiz
and Darwin Caldwell
Novel Mechanism of Upper
Limb Exoskeleton for Weight
Support
WeR8. Wearable robotic solutions
for factories of the future
Jawad Masood, Angel
Dacal Nieto, Victor
Alonso Ramos, Maria
Isabel Fontano Blanco,
Anthony Voilque and
Julia Bou
Industrial Wearable Exoskeleton
and Exosuit Assessment Process
WeR8. Wearable robotic solutions
for factories of the future
Andrea Blanco Ivorra,
Jorge Antonio Díez
Pomares, David López
Pérez, José Vicente
García Pérez, José María
Catalán Orts and Nicolas
Garcia-Aracil
Human-centered design of an
upper-limb exoskeleton for
tedious maintenance tasks
WeR8. Wearable robotic solutions
for factories of the future
FRIDAY 19 OCT
Giacinto Luigi Cerone,
Jacopo Filippi and Marco
Gazzoni
A tendon-like orthosis
actuated by Shape Memory
Alloy wires and controlled by
myoelectric signals: a single-
finger prototype
SS11. Redundancy and modularity
in motor control: neuroscience,
prosthetic, rehabilitative and
assistive approaches
SS7. Shaping robotic training to
maximize patient outcome: new
trends and perspectives
Oscar Herrero Gimenez,
Alejandro Pascual-
Vandunciel and Francisco
Resquin
Rehabilitation of Reaching
Movements after Stroke
using a Hybrid Robotic
System triggered by motor
intent
SS11. Redundancy and modularity
in motor control: neuroscience,
prosthetic, rehabilitative and
assistive approaches
SS7. Shaping robotic training to
maximize patient outcome: new
trends and perspectives
Takashi Watanabe and
Takumi Tadano
An Examination of
Stimulation Timing Patterns
for Mobile FES Cycling
under Closed-loop Control of
Low Cycling Speed
SS20. Application of Functional
Electrical Stimulation (FES) to lower
limb movement assistance
Jenifer Miehlbradt, Camilla
Pierella, Nawal Kinany,
Martina Coscia, Elvira
Pirondini, Matteo Vissani,
Alberto Mazzoni, Cécile
Magnin, Pierre Nicolo,
Adrian Guggisberg and
Silvestro Micera
Evolution of cortical
asymmetry with post-stroke
rehabilitation: a pilot study
SS21. Uncovering neural
mechanisms of post-stroke recovery
using clinical imaging tools

4th
International Conference on Neurorehabilitation
Sigrid Dupan, Ivan
Vujaklija, Giulia De Vitis,
Strahinja Dosen, Dario
Farina and Dick F
Stegeman
HD-EMG to assess motor
learning in myoelectric
control
SS24. Array electrode for the
assessment of muscle functions;
When, where and why?
Filip Urh and Ales Holobar Cross-examination of motor
unit pulses improves the
accuracy of motor unit
identification from high-
density EMG
SS24. Array electrode for the
assessment of muscle functions;
When, where and why?
Andrés Jover, Gemma
Martí, Fernando Torres,
Santiago Puente and Andrés
Úbeda
Evaluation of hand-grip
features using low-cost
electromyography
SS3. Computer Models in the Design
of Neurotechnologies and
Rehabilitation Tools
Priscilla Corsi, Emanuele
Formento, Marco
Capogrosso and Silvestro
Micera
Role of Renshaw cells in the
mammalian locomotor
circuit: a computational study
SS3. Computer Models in the Design
of Neurotechnologies and
Rehabilitation Tools
Elisabetta Giannessi, Maria
Rita Stornelli and Pier
Nicola Sergi
A hybrid framework to
investigate physical stress
evolution in peripheral nerves
SS3. Computer Models in the Design
of Neurotechnologies and
Rehabilitation Tools
Pier Nicola Sergi, Winnie
Jensen, Ken Yoshida and
Silvestro Micera
Hybrid and fast: a novel in
silico approach with reduced
computational cost to predict
failures of \textit{in vivo}
needle-based implantations
SS3. Computer Models in the Design
of Neurotechnologies and
Rehabilitation Tools
Marco Controzzi,
Francesco Clemente, Diego
Barone, Lorenzo Bassi
Luciani, Neri Pierotti,
Michele Bacchereti and
Christian Cipriani
Progress towards the
development of the DeTOP
hand prosthesis: a sensorized
transradial prosthesis for
clinical use
SS4. New perspectives in upper limb
prosthetics: from the robotics
laboratory to clinical use
Marion Badi, Sophie
Wurth, Mélanie Kaeser,
Paul Cvancara, Thomas
Stieglitz, Grégoire
Courtine, Jocelyne Bloch,
Marco Capogrosso, Eric
Rouiller and Silvestro
Micera
Development of an
intraneural peripheral
stimulation paradigm for the
restoration of fine hand
control in non-human
primates
SS4. New perspectives in upper limb
prosthetics: from the robotics
laboratory to clinical use
Jessica Brand, Ilario
Imbinto, Michele
Bacchereti, Christian
Cipriani and Marco
Controzzi
Improvements on the design
of the S-Finger prosthetic
digit
SS4. New perspectives in upper limb
prosthetics: from the robotics
laboratory to clinical use
José Flores, Javier
Izquierdo and Jose Luis
Pons
Design, development and
evaluation of an experimental
protocol, to know objectively
the degree of acceptance of
the users of exoskeleton for
rehabilitation
SS7. Shaping robotic training to
maximize patient outcome: new
trends and perspectives

4th
International Conference on Neurorehabilitation
Irene Aprile, Marco
Germanotta, Arianna
Cruciani, Simona Loreti,
Cristiano Pecchioli, Angelo
Montesano, Silvia Galeri,
Francesca Cecchi, Manuela
Diverio, Catuscia Falsini,
Gabriele Speranza,
Emanuele Langone, Luca
Padua and Fdg Robotic
Rehabilitation Group
A Multicenter Randomized
Controlled Trial on the upper
limb robotic rehabilitation in
subacute stroke using a set of
robotic and sensor-based
devices: feasibility of the
InTeReSt study
SS7. Shaping robotic training to
maximize patient outcome: new
trends and perspectives
Luca Padua, Isabella
Imbimbo, Irene Aprile,
Claudia Loreti, Marco
Germanotta, Daniele
Coraci, Claudia Santilli,
Arianna Cruciani, Maria
Chiara Carrozza and Fdg
Robotic Rehabilitation
Group
The role of Cognitive
Reserve in the choice of
upper limb rehabilitation
treatment after stroke.
Robotic or Conventional? A
multicenter study of the Don
Carlo Gnocchi Foundation
SS7. Shaping robotic training to
maximize patient outcome: new
trends and perspectives
Maria Alvarez, Delia
Sepúlveda, Vicente Lozano,
Silvia Ceruelo, Ángel Gil,
Álvaro Gutiérrez and Ana
de Los Reyes
Preliminary development of
two serious games for
rehabilitation of Spinal Cord
injured patients
SS7. Shaping robotic training to
maximize patient outcome: new
trends and perspectives
Daniele Giansanti,
Giovanni Maccioni and
Mauro Grigioni
Integration of step counters in
neuro-motion rehabilitation:
from the selection of the
technologies in a kit to the
guidelines
SS7. Shaping robotic training to
maximize patient outcome: new
trends and perspectives
Juan Carlos Arceo, Jimmy
Lauber, Lucien Robinault,
Sebastien Paganelli, Mads
Jochumsen, Imran Khan
Niazi, Emilie Simoneau and
Sylvain Cremoux
Modeling and Control of
Rehabilitation Robotic
Device: motoBOTTE
SS7. Shaping robotic training to
maximize patient outcome: new
trends and perspectives
Maddalena Mugnosso,
Francesca Marini, Luca
Doglio, Chiara Panicucci,
Claudio Bruno, Paolo
Moretti, Pietro Morasso and
Jacopo Zenzeri
Quantitative muscle fatigue
assessment in neuromuscular
disorders: a pilot study on
Duchenne pediatric subjects
SS7. Shaping robotic training to
maximize patient outcome: new
trends and perspectives
SS8. Neurorehabilitation from
clinical perspective and robotic
perspective: Contradictions and
Integrations
Stefano Mazzoleni, Vi Do
Tran, Laura Iardella, Elisa
Falchi, Paolo Dario and
Federico Posteraro
Transcranial direct current
stimulation and wrist robot-
assisted integrated treatment
on subacute stroke patients: a
randomized, sham-controlled
trial
SS7. Shaping robotic training to
maximize patient outcome: new
trends and perspectives
SS8. Neurorehabilitation from
clinical perspective and robotic
perspective: Contradictions and
Integrations
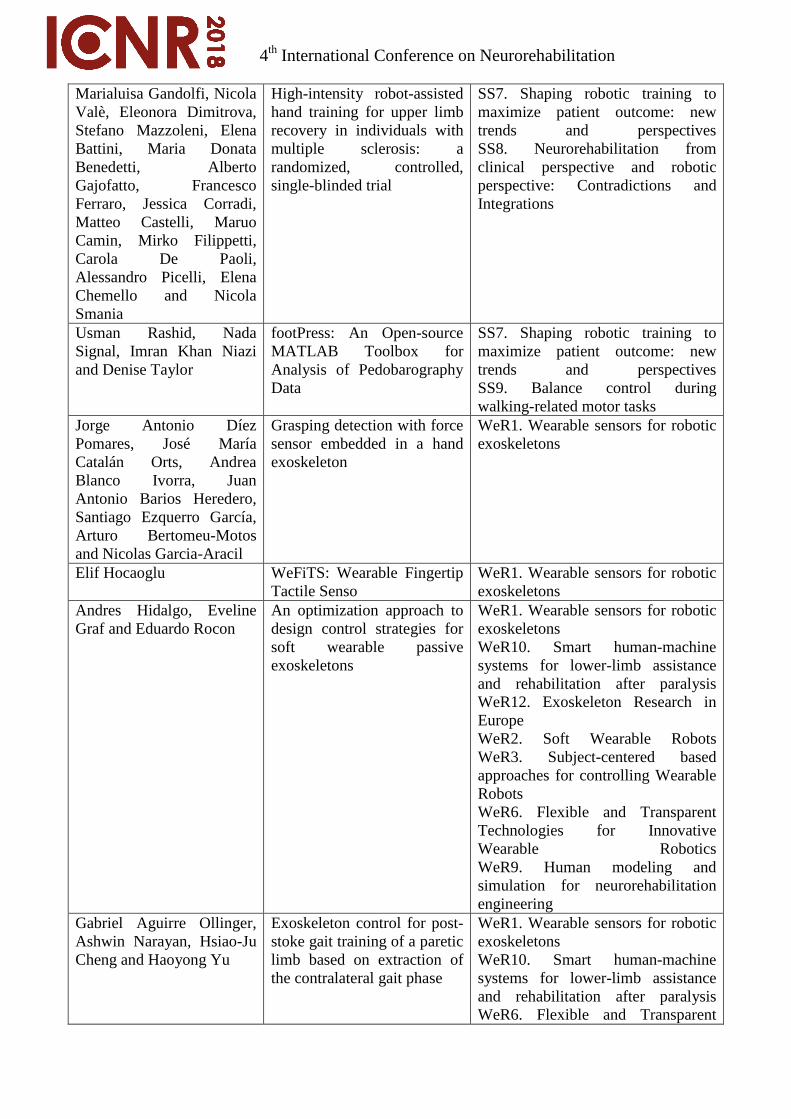
4th
International Conference on Neurorehabilitation
Marialuisa Gandolfi, Nicola
Valè, Eleonora Dimitrova,
Stefano Mazzoleni, Elena
Battini, Maria Donata
Benedetti, Alberto
Gajofatto, Francesco
Ferraro, Jessica Corradi,
Matteo Castelli, Maruo
Camin, Mirko Filippetti,
Carola De Paoli,
Alessandro Picelli, Elena
Chemello and Nicola
Smania
High-intensity robot-assisted
hand training for upper limb
recovery in individuals with
multiple sclerosis: a
randomized, controlled,
single-blinded trial
SS7. Shaping robotic training to
maximize patient outcome: new
trends and perspectives
SS8. Neurorehabilitation from
clinical perspective and robotic
perspective: Contradictions and
Integrations
Usman Rashid, Nada
Signal, Imran Khan Niazi
and Denise Taylor
footPress: An Open-source
MATLAB Toolbox for
Analysis of Pedobarography
Data
SS7. Shaping robotic training to
maximize patient outcome: new
trends and perspectives
SS9. Balance control during
walking-related motor tasks
Jorge Antonio Díez
Pomares, José María
Catalán Orts, Andrea
Blanco Ivorra, Juan
Antonio Barios Heredero,
Santiago Ezquerro García,
Arturo Bertomeu-Motos
and Nicolas Garcia-Aracil
Grasping detection with force
sensor embedded in a hand
exoskeleton
WeR1. Wearable sensors for robotic
exoskeletons
Elif Hocaoglu WeFiTS: Wearable Fingertip
Tactile Senso
WeR1. Wearable sensors for robotic
exoskeletons
Andres Hidalgo, Eveline
Graf and Eduardo Rocon
An optimization approach to
design control strategies for
soft wearable passive
exoskeletons
WeR1. Wearable sensors for robotic
exoskeletons
WeR10. Smart human-machine
systems for lower-limb assistance
and rehabilitation after paralysis
WeR12. Exoskeleton Research in
Europe
WeR2. Soft Wearable Robots
WeR3. Subject-centered based
approaches for controlling Wearable
Robots
WeR6. Flexible and Transparent
Technologies for Innovative
Wearable Robotics
WeR9. Human modeling and
simulation for neurorehabilitation
engineering
Gabriel Aguirre Ollinger,
Ashwin Narayan, Hsiao-Ju
Cheng and Haoyong Yu
Exoskeleton control for post-
stoke gait training of a paretic
limb based on extraction of
the contralateral gait phase
WeR1. Wearable sensors for robotic
exoskeletons
WeR10. Smart human-machine
systems for lower-limb assistance
and rehabilitation after paralysis
WeR6. Flexible and Transparent

4th
International Conference on Neurorehabilitation
Technologies for Innovative
Wearable Robotics
Chris Baten, Wiebe De
Vries de Vries, Leendert
Schaake, Juryt Witteveen,
Daniel Scherly, Konrad
Stadler, Andres Hidalgo
Romero, Eduardo Rocon,
Danny Plass-Oude Bos and
Jeroen Linssen
XoSoft Connected Monitor
(XCM) unsupervised
monitoring and feedback in
soft exo-skeletons of 3D
kinematics, kinetics,
behavioral context and
control system status
WeR1. Wearable sensors for robotic
exoskeletons
WeR12. Exoskeleton Research in
Europe
WeR2. Soft Wearable Robots
WeR6. Flexible and Transparent
Technologies for Innovative
Wearable Robotics
Merve Acer and Adnan
Furkan Yıldız
Force Localization
Estimation Using a Designed
Soft Tactile Sensor
WeR1. Wearable sensors for robotic
exoskeletons
WeR2. Soft Wearable Robots
John Nassour and Fred
Hamker
Tactile and Proximity
Servoing by A Multi-modal
Sensory Soft Hand
WeR1. Wearable sensors for robotic
exoskeletons
WeR2. Soft Wearable Robots
Evagoras Xydas and
Konstantinos Kostas
Passive-active knee
exoskeleton based on
optimized stacked four-bar
linkages for rehabilitation of
stroke survivors
WeR1. Wearable sensors for robotic
exoskeletons
WeR3. Subject-centered based
approaches for controlling Wearable
Robots
WeR7. Wearable Robotics for
rehabilitation and assistance in Latin
America
Mario Ortiz, Marisol
Rodriguez-Ugarte, Eduardo
Iáñez and Jose M. Azorín
Study of algorithms and
classifiers for an offline BMI
based on motor imagery of
pedaling
WeR10. Smart human-machine
systems for lower-limb assistance
and rehabilitation after paralysis
Luís Quinto, Sérgio
Gonçalves and Miguel
Silva
Design of a passive
exoskeleton to support sit-to-
stand movement: A 2D
model for the dynamic
analysis of motion
WeR10. Smart human-machine
systems for lower-limb assistance
and rehabilitation after paralysis
WeR11. Biorobotics approaches to
understand and restore human
balance
WeR2. Soft Wearable Robots
WeR9. Human modeling and
simulation for neurorehabilitation
engineering
Arvind
Ramanujam, Kamyar
Momeni, Syed Raza
Husain, Jonathan
Augustine, Erica Garbarini,
Peter Barrance, Ann
Spungen, Pierre Asselin,
Steven Knezevic and Gail
Forrest
Center of mass and postural
adaptations during robotic
exoskeleton-assisted walking
for individuals with spinal
cord injury
WeR10. Smart human-machine
systems for lower-limb assistance
and rehabilitation after paralysis
WeR11. Biorobotics approaches to
understand and restore human
balance
WeR9. Human modeling and
simulation for neurorehabilitation
engineering

4th
International Conference on Neurorehabilitation
Matteo Arquilla, Iolanda
Pisotta, Federica
Tamburella, Nevio Luigi
Tagliamonte, Marcella
Masciullo, Amy Wu, Cory
Meijneke, Auke Jan
Ijspeert, Herman van der
Kooij and Marco Molinari
Walking Assistance of
Subjects with Spinal Cord
Injury with an Ankle
Exoskeleton and
Neuromuscular Controller
WeR10. Smart human-machine
systems for lower-limb assistance
and rehabilitation after paralysis
WeR3. Subject-centered based
approaches for controlling Wearable
Robots
Andrea Calanca, Luca
Bettinelli, Mauro Serpelloni
and Paolo Fiorini
Introducing Series Elastic
Links
WeR2. Soft Wearable Robots
WeR6. Flexible and Transparent
Technologies for Innovative
Wearable Robotics
Claudia Haarman, Edsko
Hekman, Hans Rietman and
Herman van der Kooij
Pushing the Limits: A Novel
Tape Spring Pushing
Mechanism to be Used in a
Hand Orthosis
WeR2. Soft Wearable Robots
WeR6. Flexible and Transparent
Technologies for Innovative
Wearable Robotics
Julian Fraize, Mirjam Furth
and Damiano Zanotto
Design and Preliminary
Validation of a Smart
Personal Flotation Device
WeR2. Soft Wearable Robots
WeR6. Flexible and Transparent
Technologies for Innovative
Wearable Robotics
Arnaldo G. Leal-Junior,
Antreas
Theodosiou, Anselmo
Frizera, Maria F.
Domingues, Cátia Leitão,
Kyriacos Kalli, Paulo
André, Paulo Antunes,
Maria José Pontes and
Carlos Marques
Polymer Optical Fiber
Sensors Approaches for
Insole Instrumentation
WeR6. Flexible and Transparent
Technologies for Innovative
Wearable Robotics
Stein Crispel, Pablo Lopez
Garcia, Tom Verstraten,
Bryan Convens, Elias
Saerens, Bram
Vanderborght and Dirk
Lefeber
Introducing compound
planetary gears (C-PGTs): a
compact way to achieve high
gear ratios for wearable
robots
WeR6. Flexible and Transparent
Technologies for Innovative
Wearable Robotics
Matteo Bianchi, Nicola
Secciani, Alessandro
Ridolfi, Federica Vannetti
and Guido Pasquini
Model-based approach in
developing a hand
exoskeleton for children: a
preliminary study
WeR6. Flexible and Transparent
Technologies for Innovative
Wearable Robotics
Platinum Sponsors
EXHIBITOR PLAN
THANKS TO OUR SPONSORS

4th
International Conference on Neurorehabilitation
Gold Sponsor
Silver Sponsors
Research projects