talking robotstalkingrobots.dfki.de/cms/wp-content/uploads/2011/10/5.intro-tarot... · talking...
TRANSCRIPT

Talking RobotsIntroducing Tarot (1)
Geert-Jan M. Kruijff
Monday, January 16, 2012

Talking Robots @ German Research Center for AI
Geert-Jan M. Kruijff © 2011 http://talkingrobots.dfki.de
Tarot: The Talking Robots Toolkit
http://talkingrobots.dfki.de/?page_id=443
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Goal and overview
Goal
Introduce Tarot in terms of aim, structure; introduce one of the core concepts (Logical Forms), discuss parsing, content planning and realizing utterances.
Overview
1. Tarot: Aims and overview
2. Logical forms
3. Using tccg to parse with MOLOKO
4. Content planning: From proto-logical form to full form
5. Exercises
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Tarot: Aims
Tarot: Talking Robots Toolkit
Provide a comprehensive toolkit for building systems for situated dialogue processing for human-robot interaction, including the connection to robot middleware.
What would Tarot enable you to do?
Build a spoken dialogue system
Build connections to extra-linguistic representations, to influence comprehension & production
Build connections to robot middleware, to “control” a robot
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Tarot: Background
Situated dialogue as collaborative activity
Intention-based view on situated dialogue processing
Dialogue comprehension and -management based on intention / intension / denotation cycle
Ontological mediation to situate meaning
Ontologies, relational structure are considered core to establishing connections between different levels of representation,
be that within dialogue processing, or between dialogue and other (extra-linguistic) processes
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Tarot: Overview
Core
API: ASR, parsing, dialogue interpretation & management, content planning, realization, synthesis
Resources: CCG grammar (MOLOKO)
All API packages and resources come with documentation
Additional
Bridges to commercial ASR packages (Nuance, Loquendo)
R&D prototypes for different levels of functionality
Middleware
ROS, NAO
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
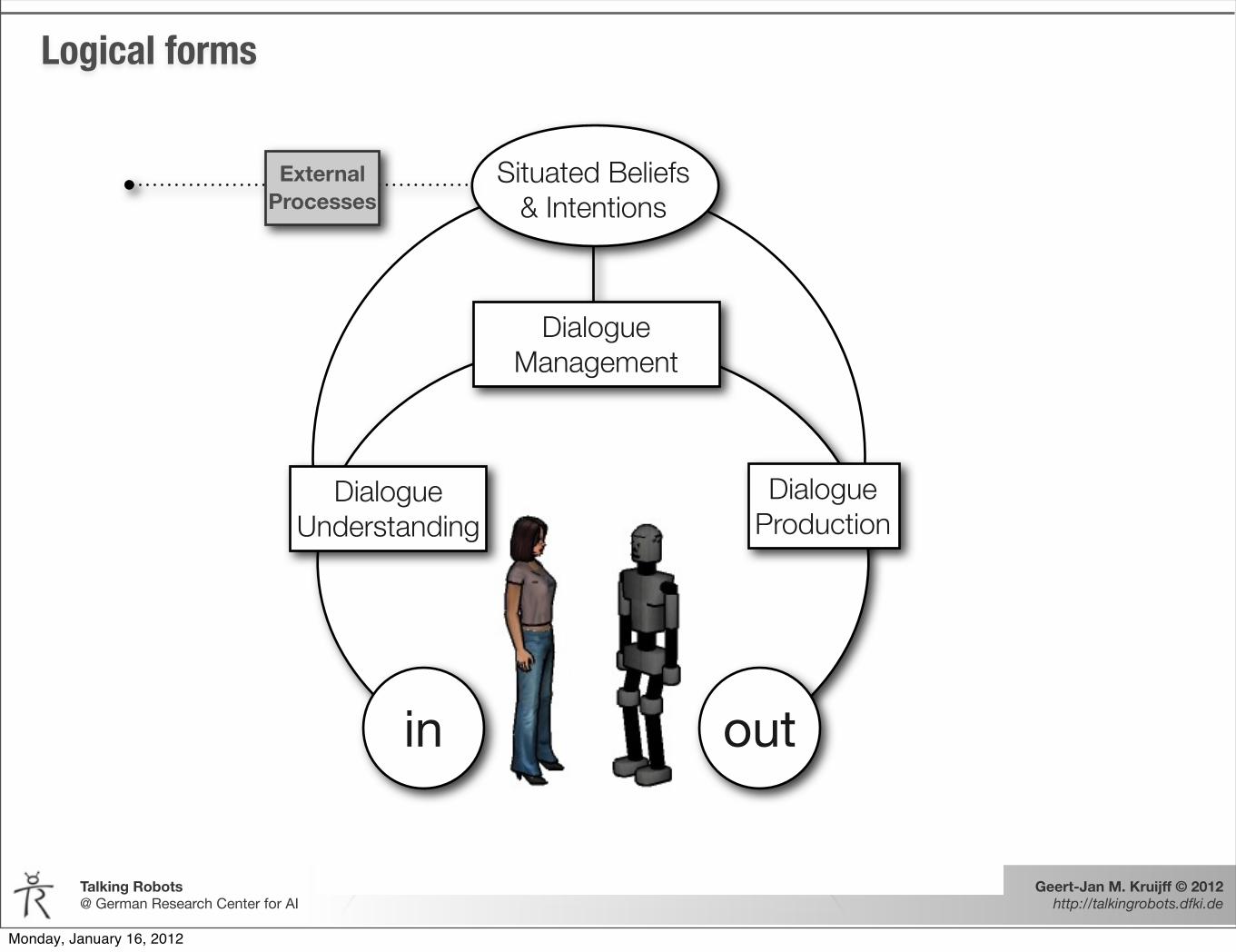
Logical forms
Situated Beliefs & Intentions
ExternalProcesses
Dialogue Management
Dialogue Production
in
Dialogue Understanding
out
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Getting to logical forms
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
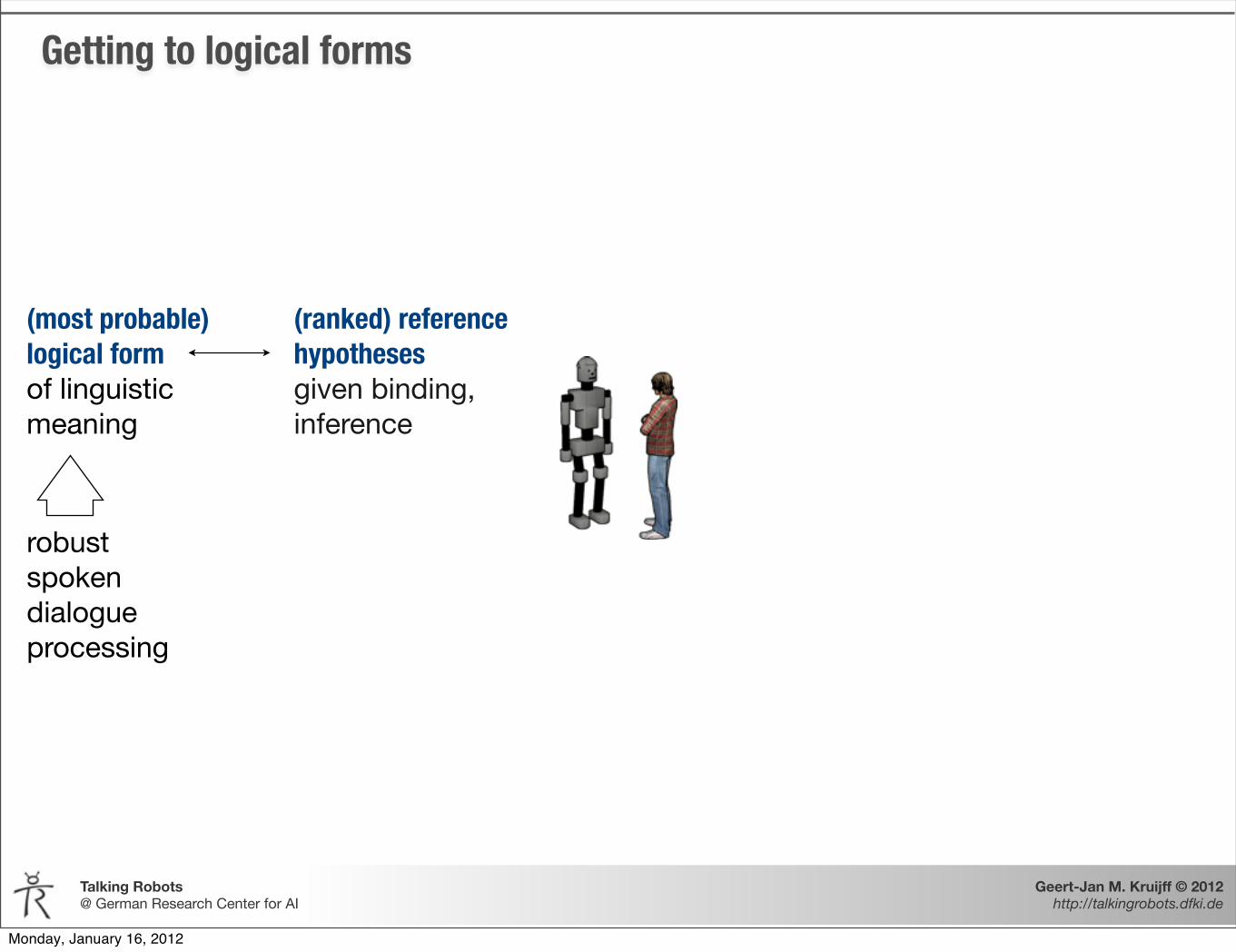
Getting to logical forms
robust spoken dialogue processing
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Getting to logical forms
robust spoken dialogue processing
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Getting to logical forms
robust spoken dialogue processing
(most probable)logical formof linguisticmeaning
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Getting to logical forms
robust spoken dialogue processing
(most probable)logical formof linguisticmeaning
(ranked) referencehypothesesgiven binding, inference
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Getting to logical forms
robust spoken dialogue processing
(most probable)logical formof linguisticmeaning
(ranked) referencehypothesesgiven binding, inference
binding
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Getting to logical forms
robust spoken dialogue processing
(most probable)logical formof linguisticmeaning
(ranked) referencehypothesesgiven binding, inference
binding
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Getting to logical forms
robust spoken dialogue processing
(most probable)logical formof linguisticmeaning
(ranked) referencehypothesesgiven binding, inference
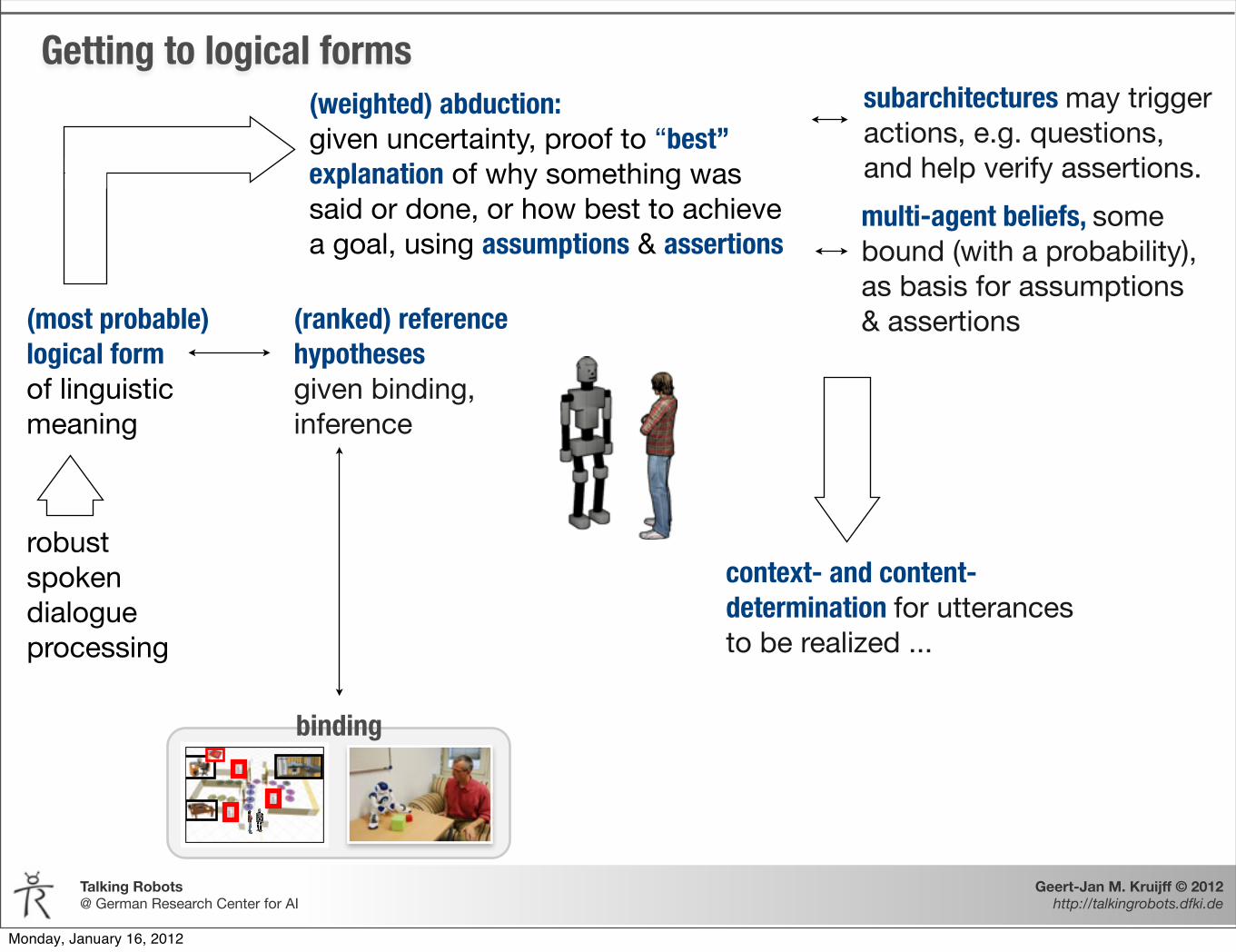
(weighted) abduction: given uncertainty, proof to “best” explanation of why something was said or done, or how best to achieve a goal, using assumptions & assertions
binding
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Getting to logical forms
robust spoken dialogue processing
(most probable)logical formof linguisticmeaning
(ranked) referencehypothesesgiven binding, inference
(weighted) abduction: given uncertainty, proof to “best” explanation of why something was said or done, or how best to achieve a goal, using assumptions & assertions
multi-agent beliefs, some bound (with a probability), as basis for assumptions & assertions
binding
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Getting to logical forms
robust spoken dialogue processing
(most probable)logical formof linguisticmeaning
(ranked) referencehypothesesgiven binding, inference
(weighted) abduction: given uncertainty, proof to “best” explanation of why something was said or done, or how best to achieve a goal, using assumptions & assertions
multi-agent beliefs, some bound (with a probability), as basis for assumptions & assertions
subarchitectures may trigger actions, e.g. questions, and help verify assertions.
binding
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Getting to logical forms
robust spoken dialogue processing
(most probable)logical formof linguisticmeaning
(ranked) referencehypothesesgiven binding, inference
(weighted) abduction: given uncertainty, proof to “best” explanation of why something was said or done, or how best to achieve a goal, using assumptions & assertions
multi-agent beliefs, some bound (with a probability), as basis for assumptions & assertions
subarchitectures may trigger actions, e.g. questions, and help verify assertions.
binding
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Getting to logical forms
robust spoken dialogue processing
(most probable)logical formof linguisticmeaning
(ranked) referencehypothesesgiven binding, inference
(weighted) abduction: given uncertainty, proof to “best” explanation of why something was said or done, or how best to achieve a goal, using assumptions & assertions
multi-agent beliefs, some bound (with a probability), as basis for assumptions & assertions
context- and content-determination for utterances to be realized ...
subarchitectures may trigger actions, e.g. questions, and help verify assertions.
binding
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Getting to logical forms
robust spoken dialogue processing
(most probable)logical formof linguisticmeaning
(ranked) referencehypothesesgiven binding, inference
(weighted) abduction: given uncertainty, proof to “best” explanation of why something was said or done, or how best to achieve a goal, using assumptions & assertions
multi-agent beliefs, some bound (with a probability), as basis for assumptions & assertions
context- and content-determination for utterances to be realized ...
subarchitectures may trigger actions, e.g. questions, and help verify assertions.
binding
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Getting to logical forms
robust spoken dialogue processing
(most probable)logical formof linguisticmeaning
(ranked) referencehypothesesgiven binding, inference
(weighted) abduction: given uncertainty, proof to “best” explanation of why something was said or done, or how best to achieve a goal, using assumptions & assertions
multi-agent beliefs, some bound (with a probability), as basis for assumptions & assertions
context- and content-determination for utterances to be realized ...
subarchitectures may trigger actions, e.g. questions, and help verify assertions.
... including assignment of contextually appropriate intonationbinding
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Building up linguistic meaning with CCG
Combinatory Categorial Grammar
In the lexicon, words are assigned categories
A category specifies the grammatical use (syntactic behavior) of the word
A category can be atomic, or a function using “slashes” \ (left) and / (right)
Functional categories are written “result first”: RES |ARG1 ... |ARGn
Examples
Nouns: N
Adjectives: N / N
Determiners: NP / N
Transitive verbs: (S \ NP) / NP, also written as S \ NP / NP
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Application
Basic rules of combination
Forward application (>): X/Y Y ⇒ X
Backward application (<): Y X\Y ⇒ X
Example derivation
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Application
Basic rules of combination
Forward application (>): X/Y Y ⇒ X
Backward application (<): Y X\Y ⇒ X
Example derivation
Ed
np
saw
(s\np)/np
Ann
np
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Application
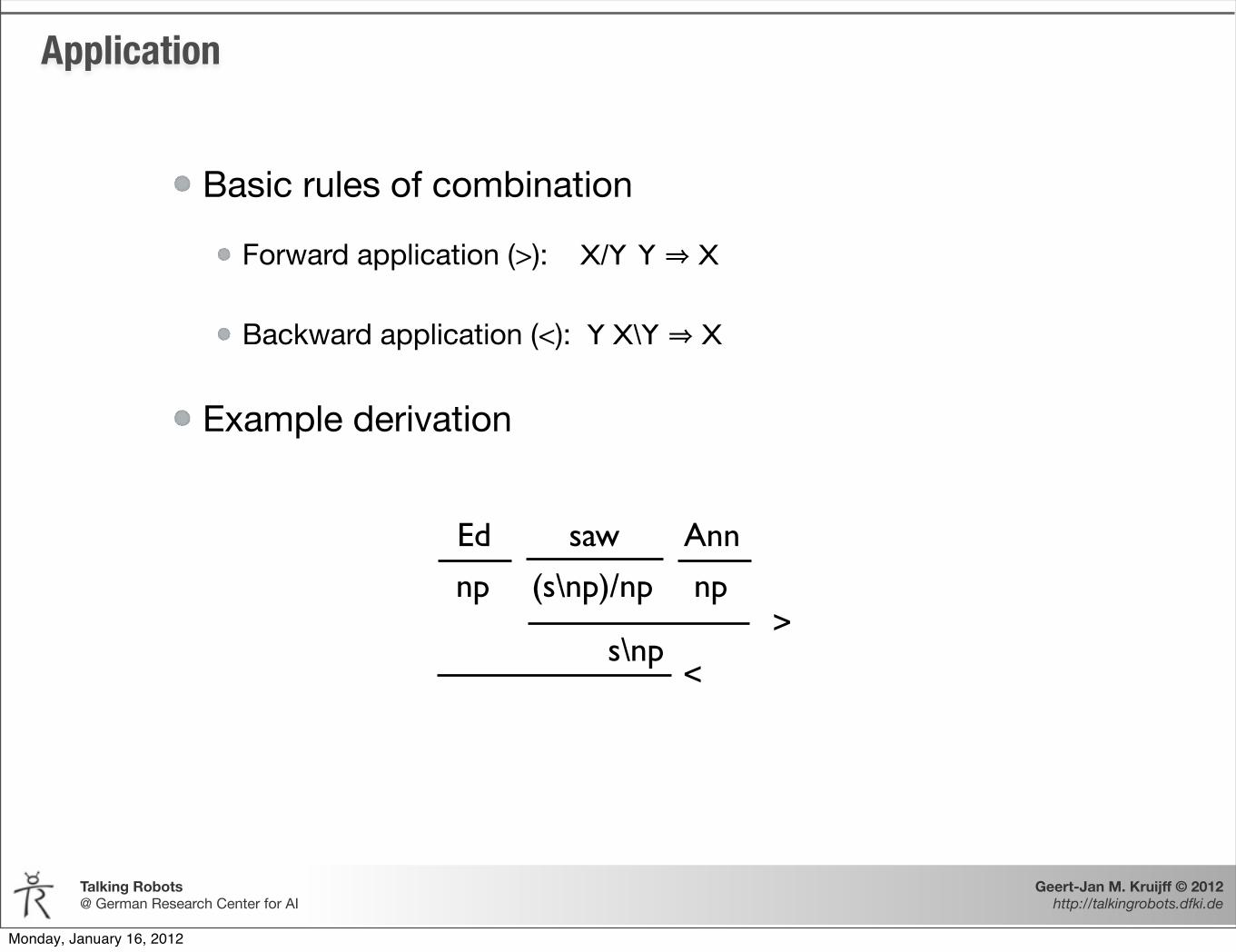
Basic rules of combination
Forward application (>): X/Y Y ⇒ X
Backward application (<): Y X\Y ⇒ X
Example derivation
Ed
np
saw
(s\np)/np
Ann
np>
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Application
Basic rules of combination
Forward application (>): X/Y Y ⇒ X
Backward application (<): Y X\Y ⇒ X
Example derivation
Ed
np
saw
(s\np)/np
Ann
np>
s\np
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Application
Basic rules of combination
Forward application (>): X/Y Y ⇒ X
Backward application (<): Y X\Y ⇒ X
Example derivation
Ed
np
saw
(s\np)/np
Ann
np>
s\np<
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Application
Basic rules of combination
Forward application (>): X/Y Y ⇒ X
Backward application (<): Y X\Y ⇒ X
Example derivation
Ed
np
saw
(s\np)/np
Ann
np>
s\nps
<
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Combinatory CG
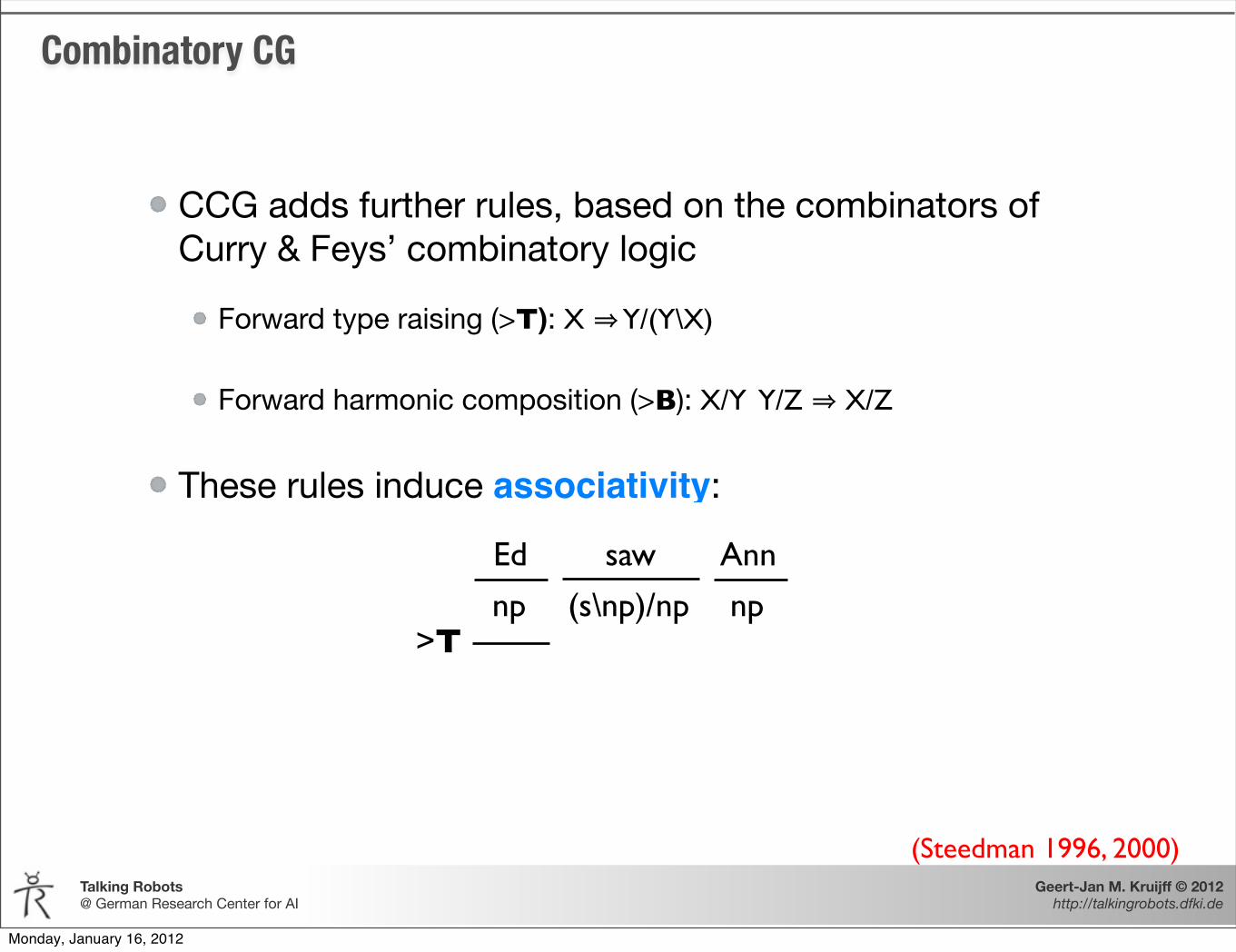
CCG adds further rules, based on the combinators of Curry & Feys’ combinatory logic
Forward type raising (>T): X ⇒ Y/(Y\X)
Forward harmonic composition (>B): X/Y Y/Z ⇒ X/Z
These rules induce associativity:
(Steedman 1996, 2000)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
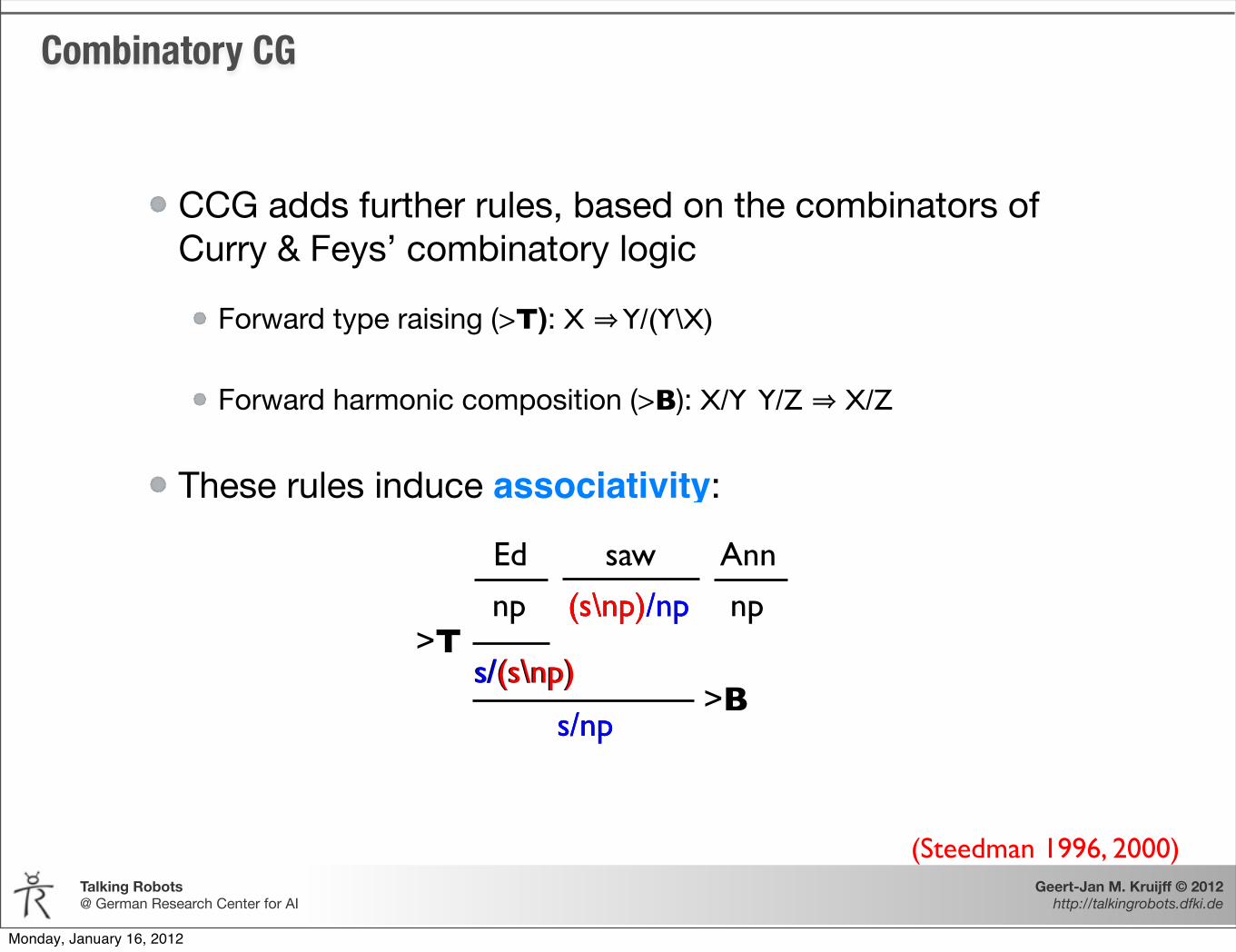
Combinatory CG
CCG adds further rules, based on the combinators of Curry & Feys’ combinatory logic
Forward type raising (>T): X ⇒ Y/(Y\X)
Forward harmonic composition (>B): X/Y Y/Z ⇒ X/Z
These rules induce associativity:
Ed
np
saw
(s\np)/np
Ann
np
(Steedman 1996, 2000)
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
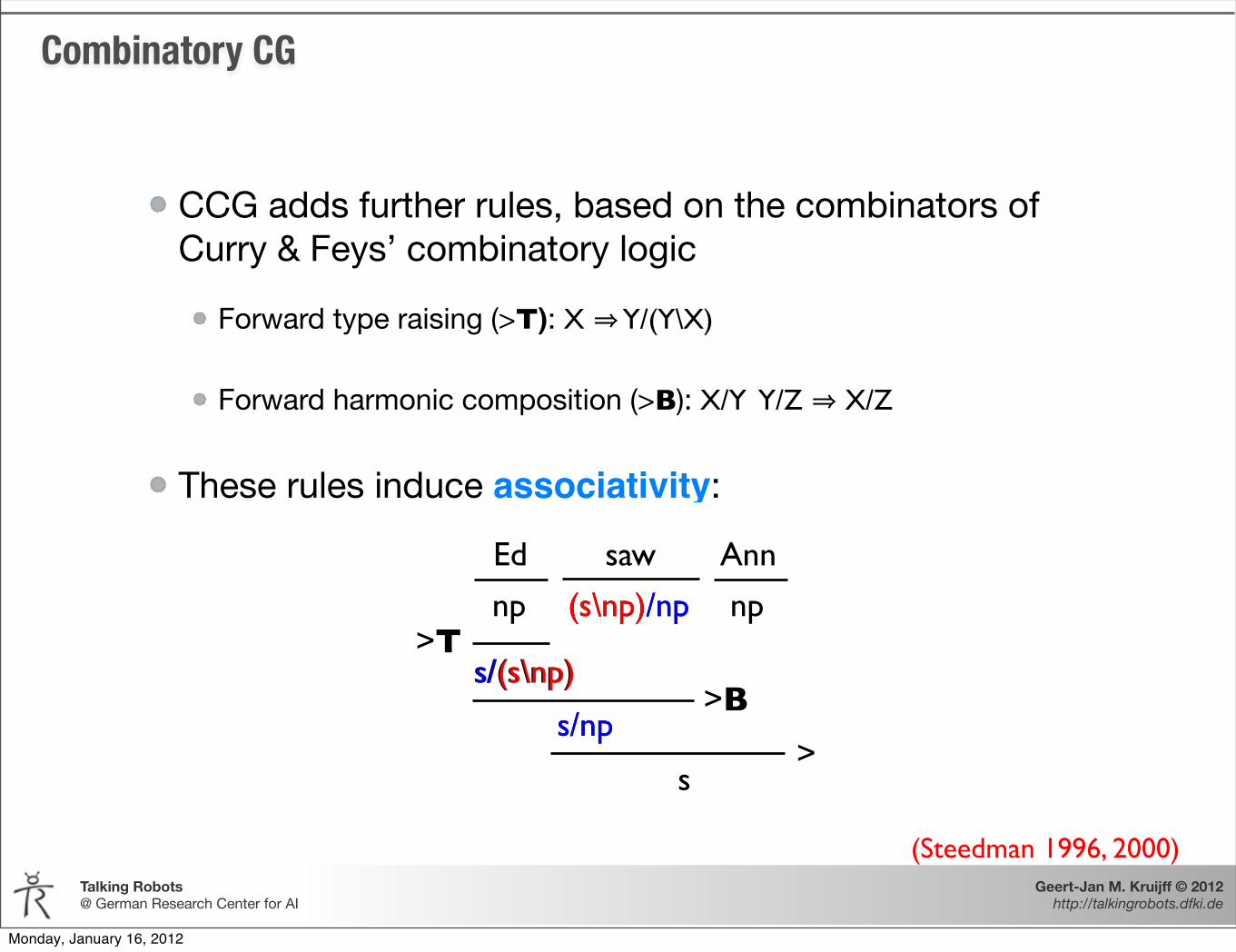
Combinatory CG
CCG adds further rules, based on the combinators of Curry & Feys’ combinatory logic
Forward type raising (>T): X ⇒ Y/(Y\X)
Forward harmonic composition (>B): X/Y Y/Z ⇒ X/Z
These rules induce associativity:
Ed
np
saw
(s\np)/np
Ann
np>T
(Steedman 1996, 2000)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Combinatory CG
CCG adds further rules, based on the combinators of Curry & Feys’ combinatory logic
Forward type raising (>T): X ⇒ Y/(Y\X)
Forward harmonic composition (>B): X/Y Y/Z ⇒ X/Z
These rules induce associativity:
Ed
np
saw
(s\np)/np
Ann
np>T
s/(s\np)
(Steedman 1996, 2000)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Combinatory CG
CCG adds further rules, based on the combinators of Curry & Feys’ combinatory logic
Forward type raising (>T): X ⇒ Y/(Y\X)
Forward harmonic composition (>B): X/Y Y/Z ⇒ X/Z
These rules induce associativity:
Ed
np
saw
(s\np)/np
Ann
np
>B
>Ts/(s\np)
(Steedman 1996, 2000)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Combinatory CG
CCG adds further rules, based on the combinators of Curry & Feys’ combinatory logic
Forward type raising (>T): X ⇒ Y/(Y\X)
Forward harmonic composition (>B): X/Y Y/Z ⇒ X/Z
These rules induce associativity:
Ed
np
saw
(s\np)/np
Ann
np
>Bs/np
>Ts/(s\np)
(Steedman 1996, 2000)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Combinatory CG
CCG adds further rules, based on the combinators of Curry & Feys’ combinatory logic
Forward type raising (>T): X ⇒ Y/(Y\X)
Forward harmonic composition (>B): X/Y Y/Z ⇒ X/Z
These rules induce associativity:
Ed
np
saw
(s\np)/np
Ann
np
>Bs/np
>Ts/(s\np)s/(s\np)
(Steedman 1996, 2000)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Combinatory CG
CCG adds further rules, based on the combinators of Curry & Feys’ combinatory logic
Forward type raising (>T): X ⇒ Y/(Y\X)
Forward harmonic composition (>B): X/Y Y/Z ⇒ X/Z
These rules induce associativity:
Ed
np
saw
(s\np)/np
Ann
np
>Bs/np
>Ts/(s\np)
(s\np)/np
s/(s\np)
(Steedman 1996, 2000)
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Combinatory CG
CCG adds further rules, based on the combinators of Curry & Feys’ combinatory logic
Forward type raising (>T): X ⇒ Y/(Y\X)
Forward harmonic composition (>B): X/Y Y/Z ⇒ X/Z
These rules induce associativity:
Ed
np
saw
(s\np)/np
Ann
np
>Bs/np
>Ts/(s\np)
(s\np)/np
s/(s\np)
s/np
(Steedman 1996, 2000)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Combinatory CG
CCG adds further rules, based on the combinators of Curry & Feys’ combinatory logic
Forward type raising (>T): X ⇒ Y/(Y\X)
Forward harmonic composition (>B): X/Y Y/Z ⇒ X/Z
These rules induce associativity:
Ed
np
saw
(s\np)/np
Ann
np
>Bs/np
>
>Ts/(s\np)
(s\np)/np
s/(s\np)
s/np
(Steedman 1996, 2000)
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Combinatory CG
CCG adds further rules, based on the combinators of Curry & Feys’ combinatory logic
Forward type raising (>T): X ⇒ Y/(Y\X)
Forward harmonic composition (>B): X/Y Y/Z ⇒ X/Z
These rules induce associativity:
Ed
np
saw
(s\np)/np
Ann
np
>Bs/np
s>
>Ts/(s\np)
(s\np)/np
s/(s\np)
s/np
(Steedman 1996, 2000)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Representing meaning
Kathy:person
book:object
read:event
park:region
locative
patient
actor
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
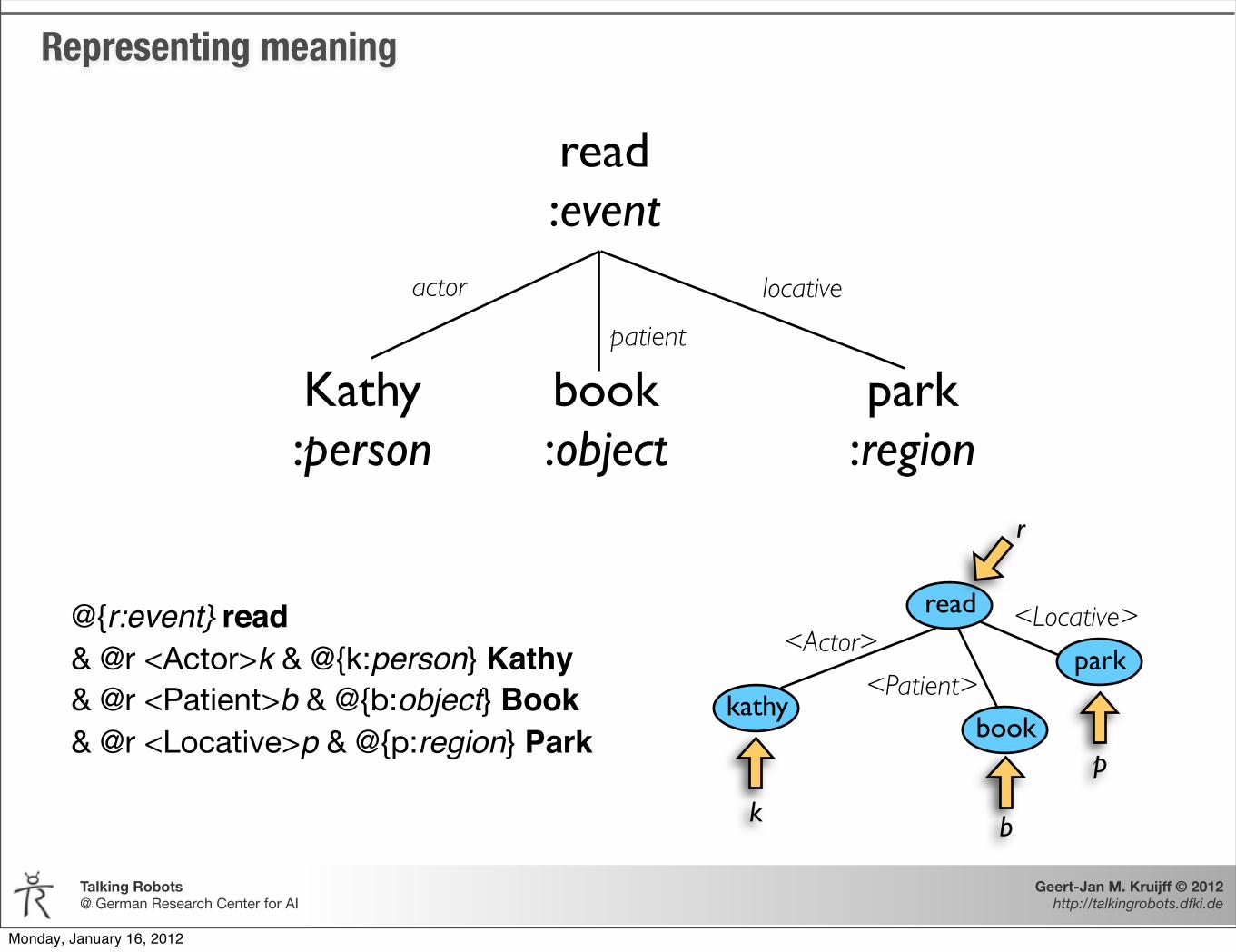
@{r:event} read & @r <Actor>k & @{k:person} Kathy& @r <Patient>b & @{b:object} Book & @r <Locative>p & @{p:region} Park
Representing meaning
Kathy:person
book:object
read:event
park:region
locative
patient
actor
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
@{r:event} read & @r <Actor>k & @{k:person} Kathy& @r <Patient>b & @{b:object} Book & @r <Locative>p & @{p:region} Park
Representing meaning
Kathy:person
book:object
read:event
park:region
locative
patient
actor
read
kathybook
park<Actor>
<Patient>
<Locative>
r
k b
p
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
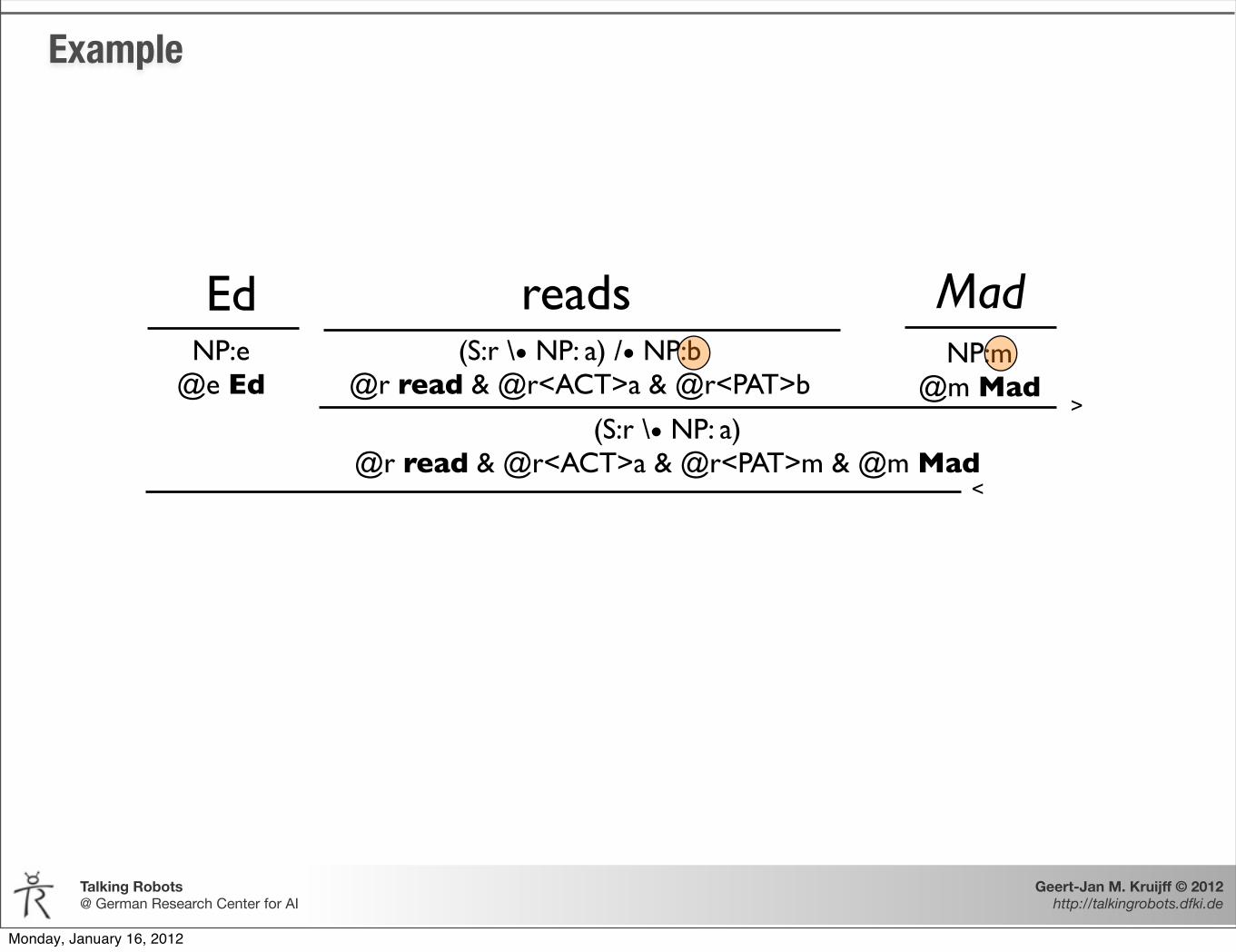
Syntax/semantics-interface
Basic idea follows older proposals by Zeevat (1988), Hoffman (1995), ...
Co-index an argument in the meaning with the category that provides it
Constraints only get triggered through when an index on a category gets unified
Derivation over categories is the only source for triggering constraints
How do we build meaning?
read(S:h \ NP: a) / NP: b
@h read & @h<ACT>a & @h<PAT>b
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
EdNP:e
@e Ed
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
EdNP:e
@e Ed
reads(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
EdNP:e
@e Ed
reads(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
EdNP:e
@e Ed
reads(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad>
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
EdNP:e
@e Ed
reads(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad>
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
EdNP:e
@e Ed
reads(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad>
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
EdNP:e
@e Ed
reads(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad>
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
EdNP:e
@e Ed
reads(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad
(S:r \● NP: a)@r read & @r<ACT>a & @r<PAT>m & @m Mad
>
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
EdNP:e
@e Ed
reads(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad
(S:r \● NP: a)@r read & @r<ACT>a & @r<PAT>m & @m Mad
>
<
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
EdNP:e
@e Ed
reads(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad
(S:r \● NP: a)@r read & @r<ACT>a & @r<PAT>m & @m Mad
S:r@r read & @r<ACT>e & @e Ed & <PAT>m & @m Mad
>
<
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
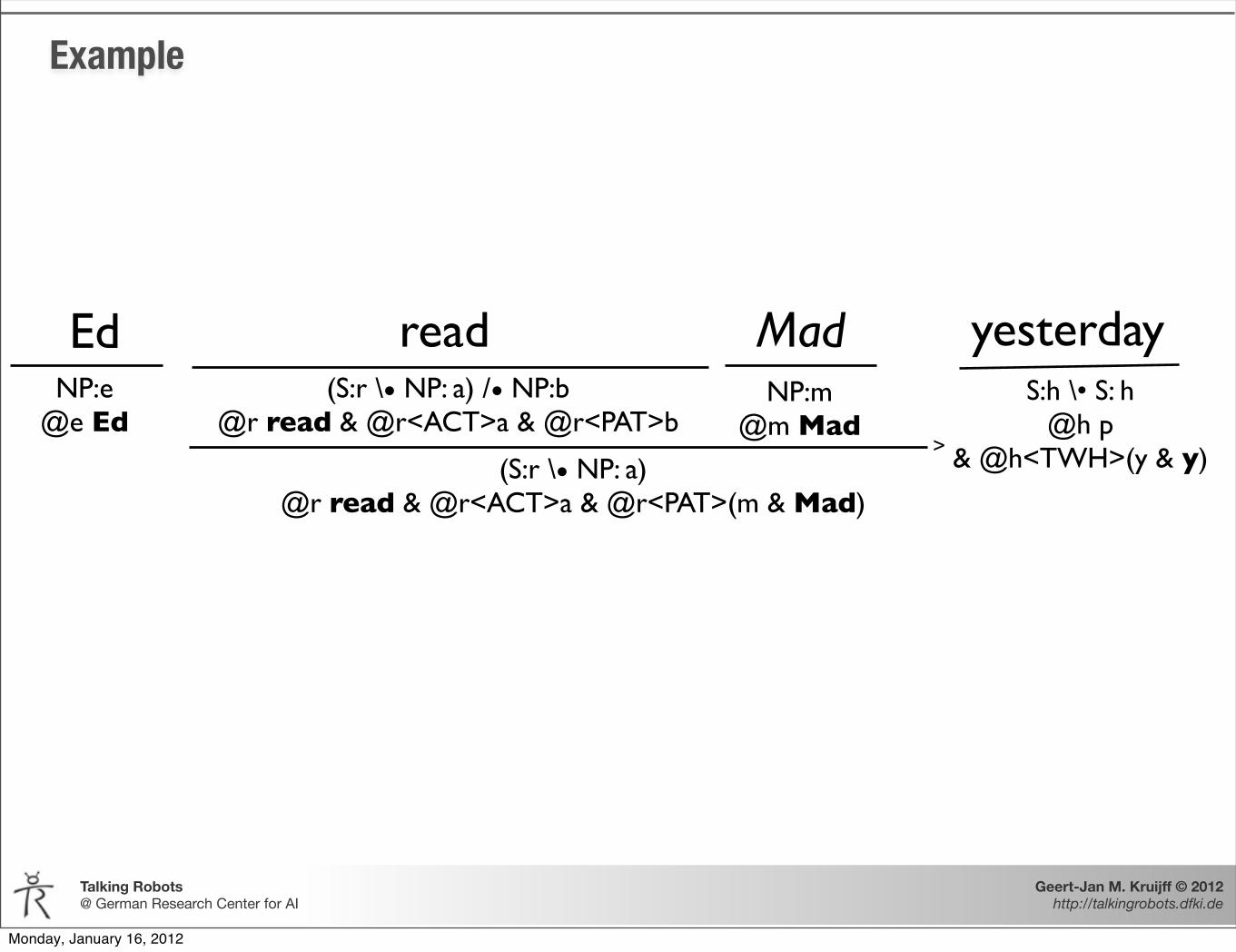
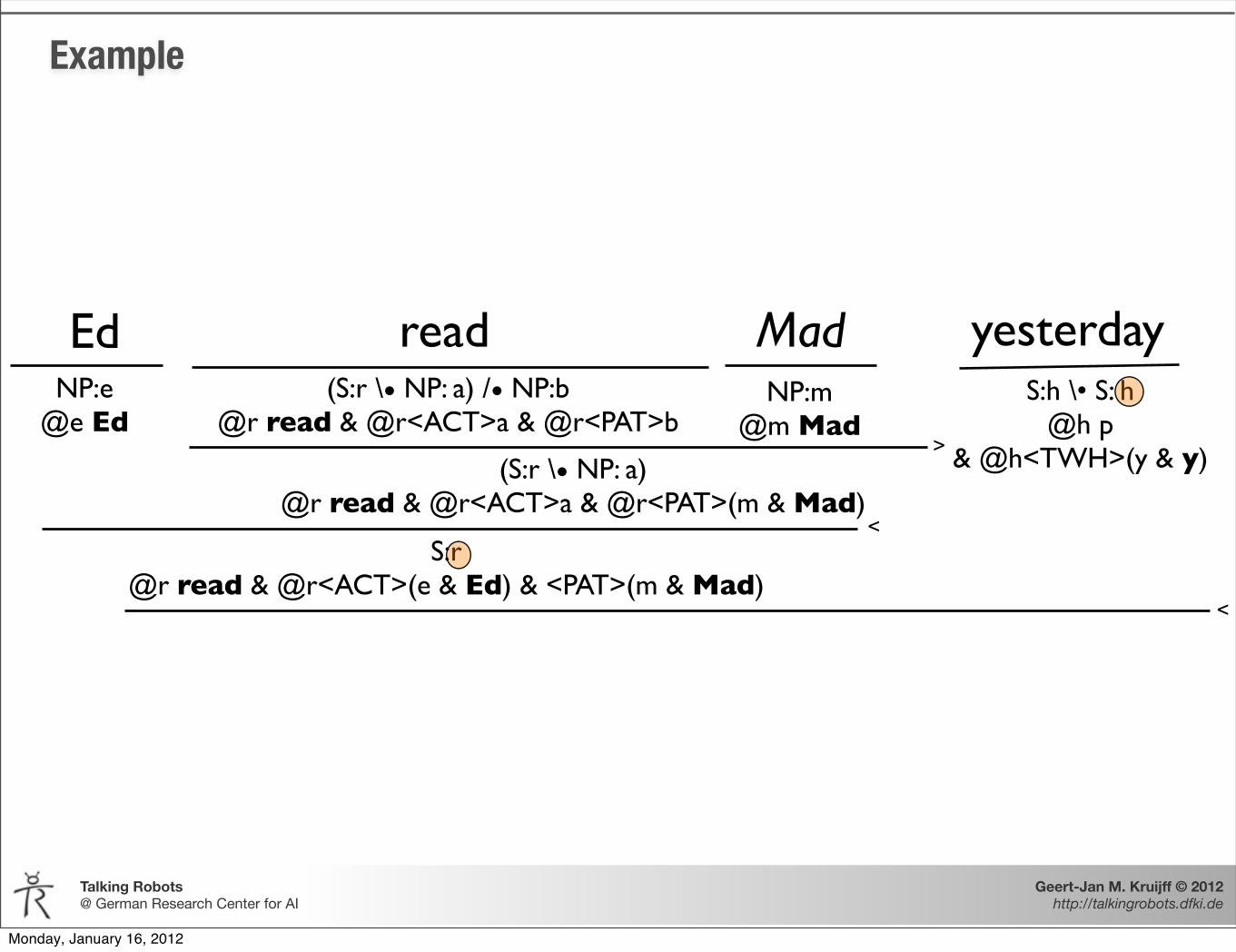
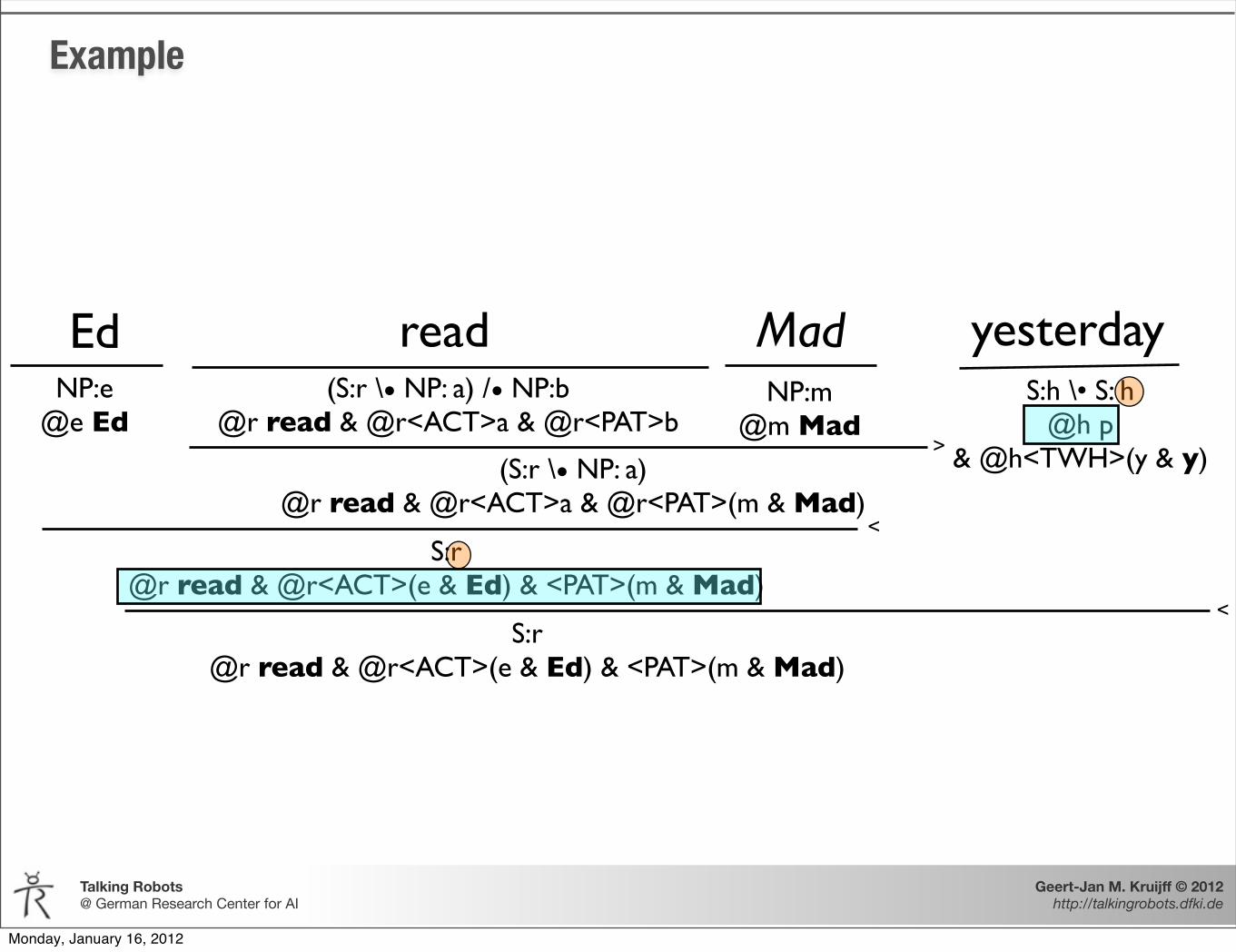
Arguments and adjuncts have different behavior
The way the meaning of an argument contributes to that of the head is specified by the head
Adjuncts use a specification that enables them to insert their meaning into that of the head they modify, extending the meaning of the head
Adjunct meaning
No longer do adjuncts act like “predicates”: yesterday(read(j,c)), we obtain (retain) a proper relational structure
yesterdayS:h \• S: h
@h p & @h <TWH>(y & yesterday)
Arguments and adjuncts
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
EdNP:e
@e Ed
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
EdNP:e
@e Ed
read(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
EdNP:e
@e Ed
read(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
yesterdayS:h \• S: h
@h p & @h<TWH>(y & y)
EdNP:e
@e Ed
read(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
yesterdayS:h \• S: h
@h p & @h<TWH>(y & y)
EdNP:e
@e Ed
read(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad>
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
yesterdayS:h \• S: h
@h p & @h<TWH>(y & y)
EdNP:e
@e Ed
read(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad
(S:r \● NP: a)@r read & @r<ACT>a & @r<PAT>(m & Mad)
>
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
yesterdayS:h \• S: h
@h p & @h<TWH>(y & y)
EdNP:e
@e Ed
read(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad
(S:r \● NP: a)@r read & @r<ACT>a & @r<PAT>(m & Mad)
>
<
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
yesterdayS:h \• S: h
@h p & @h<TWH>(y & y)
EdNP:e
@e Ed
read(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad
(S:r \● NP: a)@r read & @r<ACT>a & @r<PAT>(m & Mad)
S:r@r read & @r<ACT>(e & Ed) & <PAT>(m & Mad)
>
<
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
yesterdayS:h \• S: h
@h p & @h<TWH>(y & y)
EdNP:e
@e Ed
read(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad
(S:r \● NP: a)@r read & @r<ACT>a & @r<PAT>(m & Mad)
S:r@r read & @r<ACT>(e & Ed) & <PAT>(m & Mad)
>
<
<
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
yesterdayS:h \• S: h
@h p & @h<TWH>(y & y)
EdNP:e
@e Ed
read(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad
(S:r \● NP: a)@r read & @r<ACT>a & @r<PAT>(m & Mad)
S:r@r read & @r<ACT>(e & Ed) & <PAT>(m & Mad)
>
<
<
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
yesterdayS:h \• S: h
@h p & @h<TWH>(y & y)
EdNP:e
@e Ed
read(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad
(S:r \● NP: a)@r read & @r<ACT>a & @r<PAT>(m & Mad)
S:r@r read & @r<ACT>(e & Ed) & <PAT>(m & Mad)
>
<
<
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
yesterdayS:h \• S: h
@h p & @h<TWH>(y & y)
EdNP:e
@e Ed
read(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad
(S:r \● NP: a)@r read & @r<ACT>a & @r<PAT>(m & Mad)
S:r@r read & @r<ACT>(e & Ed) & <PAT>(m & Mad)
>
<
<S:r
@r read & @r<ACT>(e & Ed) & <PAT>(m & Mad)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
yesterdayS:h \• S: h
@h p & @h<TWH>(y & y)
EdNP:e
@e Ed
read(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad
(S:r \● NP: a)@r read & @r<ACT>a & @r<PAT>(m & Mad)
S:r@r read & @r<ACT>(e & Ed) & <PAT>(m & Mad)
>
<
<S:r
@r read & @r<ACT>(e & Ed) & <PAT>(m & Mad)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Example
yesterdayS:h \• S: h
@h p & @h<TWH>(y & y)
EdNP:e
@e Ed
read(S:r \● NP: a) /● NP:b
@r read & @r<ACT>a & @r<PAT>b
MadNP:m
@m Mad
(S:r \● NP: a)@r read & @r<ACT>a & @r<PAT>(m & Mad)
S:r@r read & @r<ACT>(e & Ed) & <PAT>(m & Mad)
>
<
<S:r
@r read & @r<ACT>(e & Ed) & <PAT>(m & Mad) & @r<TWH>(y & y)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Incremental processing with CCG
Building up meaning step-by-step
CCG enables “left-to-right” parsing
Rightward frontier shows expected category, meaning
Linguistic meaning is built up part-by-part,
using the possibility to see linguistic meaning as a conjunction over elementary predications
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Incremental processing with CCG
Building up meaning step-by-step
CCG enables “left-to-right” parsing
Rightward frontier shows expected category, meaning
Linguistic meaning is built up part-by-part,
using the possibility to see linguistic meaning as a conjunction over elementary predications
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Incremental processing with CCG
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Incremental processing with CCG
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Incremental processing with CCG
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Incremental processing with CCG
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Incremental processing with CCG
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
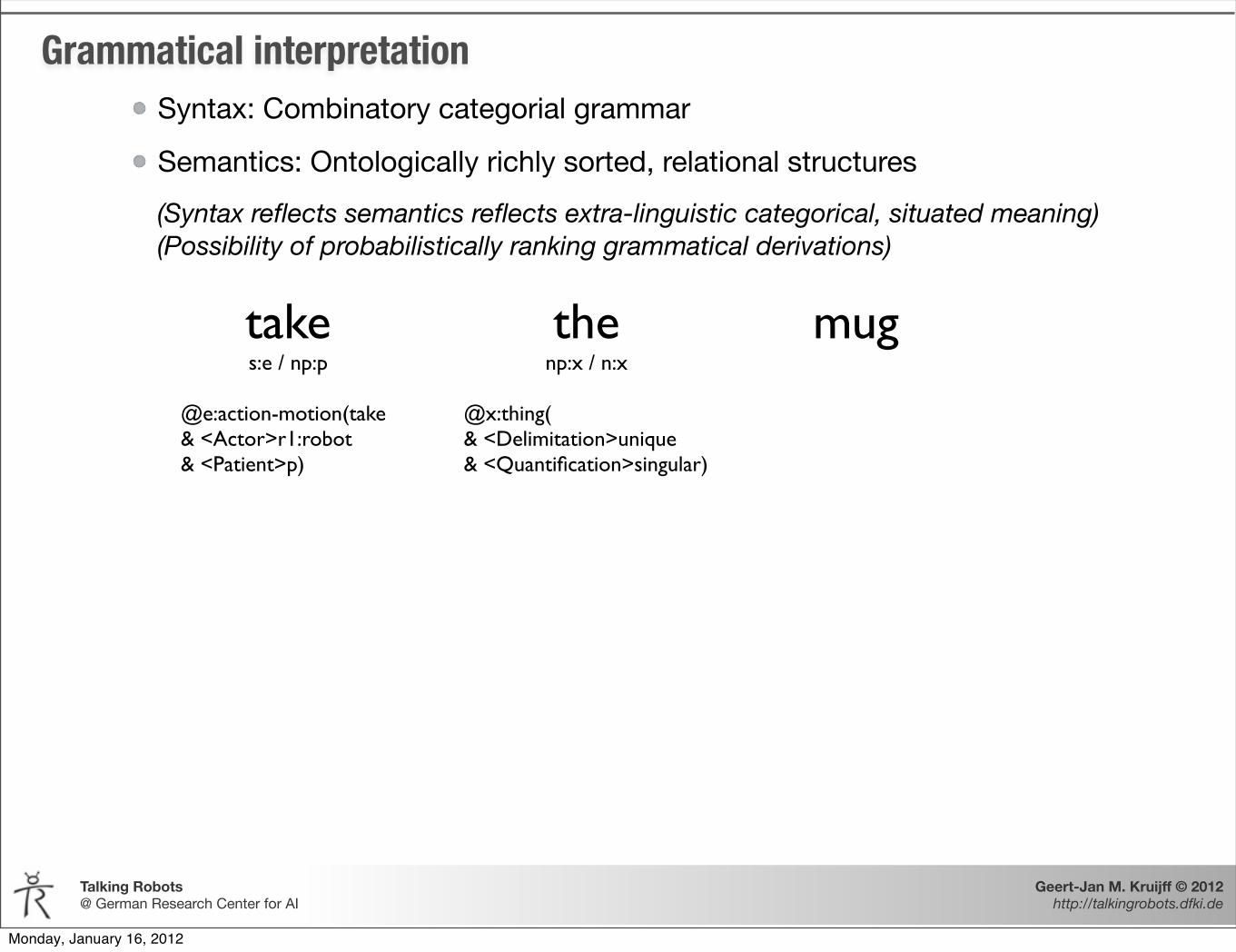
Grammatical interpretationSyntax: Combinatory categorial grammar
Semantics: Ontologically richly sorted, relational structures
(Syntax reflects semantics reflects extra-linguistic categorical, situated meaning) (Possibility of probabilistically ranking grammatical derivations)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Grammatical interpretationSyntax: Combinatory categorial grammar
Semantics: Ontologically richly sorted, relational structures
(Syntax reflects semantics reflects extra-linguistic categorical, situated meaning) (Possibility of probabilistically ranking grammatical derivations)
take the mug
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Grammatical interpretationSyntax: Combinatory categorial grammar
Semantics: Ontologically richly sorted, relational structures
(Syntax reflects semantics reflects extra-linguistic categorical, situated meaning) (Possibility of probabilistically ranking grammatical derivations)
s:e / np:p
@e:action-motion(take& <Actor>r1:robot& <Patient>p)
take the mug
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Grammatical interpretationSyntax: Combinatory categorial grammar
Semantics: Ontologically richly sorted, relational structures
(Syntax reflects semantics reflects extra-linguistic categorical, situated meaning) (Possibility of probabilistically ranking grammatical derivations)
s:e / np:p
@e:action-motion(take& <Actor>r1:robot& <Patient>p)
np:x / n:x
@x:thing(& <Delimitation>unique& <Quantification>singular)
take the mug
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Grammatical interpretationSyntax: Combinatory categorial grammar
Semantics: Ontologically richly sorted, relational structures
(Syntax reflects semantics reflects extra-linguistic categorical, situated meaning) (Possibility of probabilistically ranking grammatical derivations)
s:e / np:p
@e:action-motion(take& <Actor>r1:robot& <Patient>p)
np:x / n:x
@x:thing(& <Delimitation>unique& <Quantification>singular)
take the mug
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Grammatical interpretationSyntax: Combinatory categorial grammar
Semantics: Ontologically richly sorted, relational structures
(Syntax reflects semantics reflects extra-linguistic categorical, situated meaning) (Possibility of probabilistically ranking grammatical derivations)
s:e / np:p
@e:action-motion(take& <Actor>r1:robot& <Patient>p)
np:x / n:x
@x:thing(& <Delimitation>unique& <Quantification>singular)
take the mug
s:e / n:x
@e:action-motion(take& <Actor>r1:robot& <Patient>(x:thing & <Delimitation>unique & <Quantification>singular)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
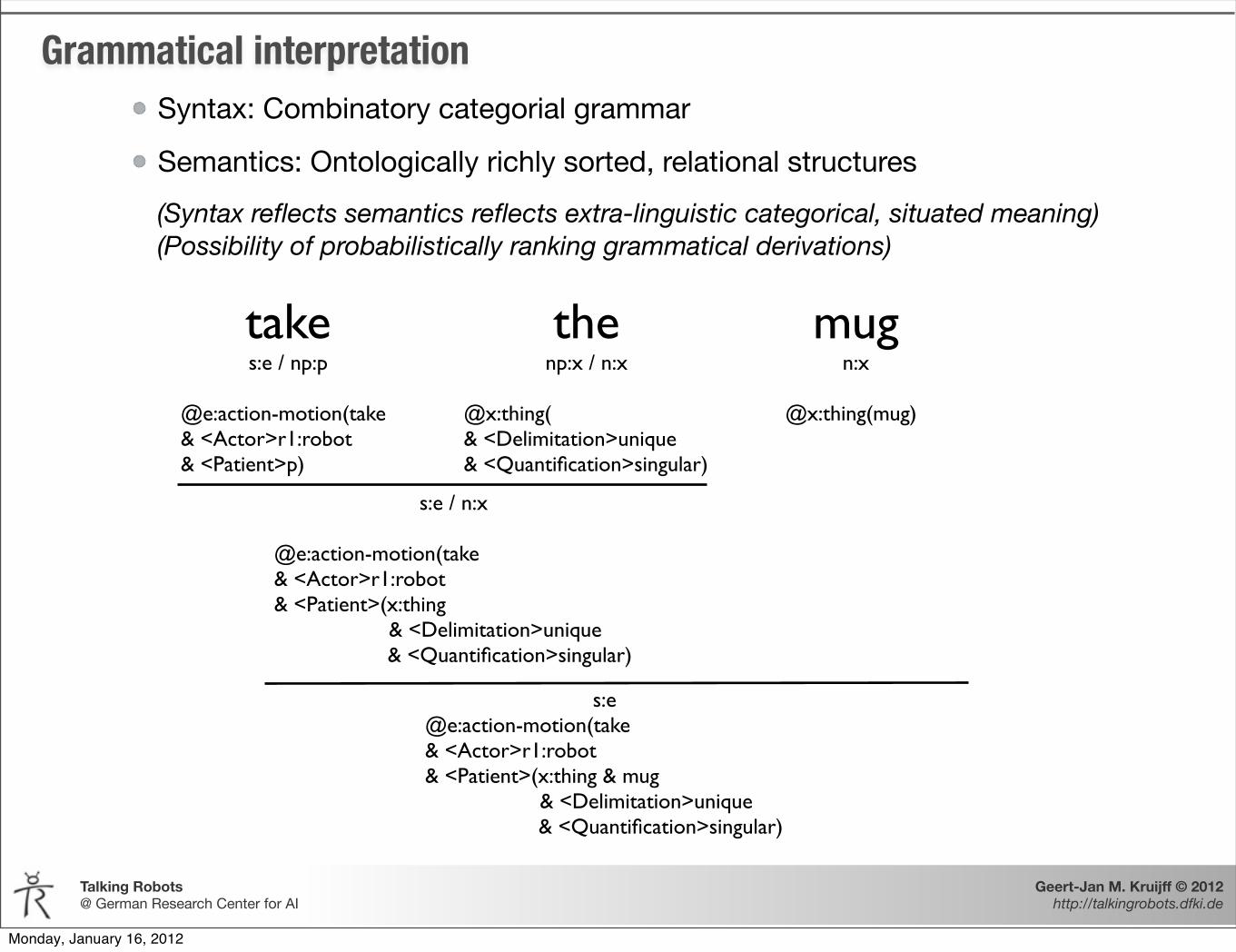
Grammatical interpretationSyntax: Combinatory categorial grammar
Semantics: Ontologically richly sorted, relational structures
(Syntax reflects semantics reflects extra-linguistic categorical, situated meaning) (Possibility of probabilistically ranking grammatical derivations)
s:e / np:p
@e:action-motion(take& <Actor>r1:robot& <Patient>p)
np:x / n:x
@x:thing(& <Delimitation>unique& <Quantification>singular)
take the mugn:x
@x:thing(mug)
s:e / n:x
@e:action-motion(take& <Actor>r1:robot& <Patient>(x:thing & <Delimitation>unique & <Quantification>singular)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Grammatical interpretationSyntax: Combinatory categorial grammar
Semantics: Ontologically richly sorted, relational structures
(Syntax reflects semantics reflects extra-linguistic categorical, situated meaning) (Possibility of probabilistically ranking grammatical derivations)
s:e / np:p
@e:action-motion(take& <Actor>r1:robot& <Patient>p)
np:x / n:x
@x:thing(& <Delimitation>unique& <Quantification>singular)
take the mugn:x
@x:thing(mug)
s:e / n:x
@e:action-motion(take& <Actor>r1:robot& <Patient>(x:thing & <Delimitation>unique & <Quantification>singular)
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Grammatical interpretationSyntax: Combinatory categorial grammar
Semantics: Ontologically richly sorted, relational structures
(Syntax reflects semantics reflects extra-linguistic categorical, situated meaning) (Possibility of probabilistically ranking grammatical derivations)
s:e / np:p
@e:action-motion(take& <Actor>r1:robot& <Patient>p)
np:x / n:x
@x:thing(& <Delimitation>unique& <Quantification>singular)
take the mugn:x
@x:thing(mug)
s:e / n:x
@e:action-motion(take& <Actor>r1:robot& <Patient>(x:thing & <Delimitation>unique & <Quantification>singular)
s:e@e:action-motion(take& <Actor>r1:robot& <Patient>(x:thing & mug & <Delimitation>unique & <Quantification>singular)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Logical forms in Tarot
MOLOKO
CCG grammar in DotCCG format
Large collection of (SVO) grammatical families,
and a large English dictionary
Parsing & realization
OpenCCG-based (API, tccg) parsing & realization support
Tarot API packages for parsing and realization extend OpenCCG
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Setting things up
Get OpenCCG running
Download OpenCCG from http://openccg.sf.net (v.0.9.4)
Install OpenCCG (cf. README)
Get MOLOKO v6
Download MOLOKO from http://talkingrobots.dfki.de/tarot
Unzip the library ...
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
The MOLOKO resource
Resource organization
Grammar provided in *.ccg format, under ccg-files
.ccg files organized (largely) by grammatical type
Resource compilation
OpenCCG works with XML format
Compilation from .ccg to XML
gj:[~/devel/moloko.v6]% ccg2xml moloko_FAST.ccg ccg2xml: Processing moloko_FAST.ccgOutputting XML file: ./moloko_FAST-lexicon.xmlOutputting XML file: ./moloko_FAST-grammar.xmlOutputting XML file: ./moloko_FAST-morph.xmlOutputting XML file: ./moloko_FAST-rules.xmlOutputting XML file: ./moloko_FAST-testbed.xmlOutputting XML file: ./moloko_FAST-types.xmlgj:[~/devel/moloko.v6]% mkdir moloko_FASTgj:[~/devel/moloko.v6]% mv moloko_FAST-*.xml moloko_FASTgj:[~/devel/moloko.v6]%
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
What compilation uses
ccg2xml
Python program to transform .ccg into XML
Different OpenCCG files are being generated (grammar, lexicon, morph, etc.)
Requires a single .ccg file to be transformed
moloko*.ccg
A single file .ccg: moloko, moloko-FAST, moloko-FULL
These files can be created by merge-ccg.pl
Merging grammar files
merge-ccg.pl runs over all .ccg files in a given directory
What files are merged is thus determined by what is there
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
What compilation creates
ccg2xml X.ccg
Creates XML files named X-abc.xml
Copy/move these to an individual subdirectory
OpenCCG
Within the individual subdirectory,
before running tccg,
rename the X-grammar.xml file to grammar.xml
gj:[~/devel/moloko.v6]% mv moloko_FAST-*.xml moloko_FAST
gj:[~/devel/moloko.v6]% cd moloko_FASTgj:[~/devel/moloko.v6]% mv moloko_FAST-grammar.xml grammar.xml
Monday, January 16, 2012

Talking Robots @ German Research Center for AI
Geert-Jan M. Kruijff © 2011 http://talkingrobots.dfki.de
And now let’s get things going!
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Starting up tccg
gj:[~/devel/moloko.v6/moloko_FAST]% tccgUnable to find a $JAVA_HOME at "/usr/", continuing with system-provided Java...Loading grammar from URL: file:/Users/gj/devel/moloko.v6/moloko_FAST/grammar.xmlGrammar 'moloko_FAST.ccg' loaded.
Enter strings to parse.Type ':r' to realize selected reading of previous parse.Type ':h' for help on display options and ':q' to quit.You can use the tab key for command completion, Ctrl-P (prev) and Ctrl-N (next) to access the command history, and emacs-style control keys to edit the line.
tccg> :h
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Starting up tccg
gj:[~/devel/moloko.v6/moloko_FAST]% tccgUnable to find a $JAVA_HOME at "/usr/", continuing with system-provided Java...Loading grammar from URL: file:/Users/gj/devel/moloko.v6/moloko_FAST/grammar.xmlGrammar 'moloko_FAST.ccg' loaded.
Enter strings to parse.Type ':r' to realize selected reading of previous parse.Type ':h' for help on display options and ':q' to quit.You can use the tab key for command completion, Ctrl-P (prev) and Ctrl-N (next) to access the command history, and emacs-style control keys to edit the line.
tccg> :h
Many options!
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Starting up tccg
gj:[~/devel/moloko.v6/moloko_FAST]% tccgUnable to find a $JAVA_HOME at "/usr/", continuing with system-provided Java...Loading grammar from URL: file:/Users/gj/devel/moloko.v6/moloko_FAST/grammar.xmlGrammar 'moloko_FAST.ccg' loaded.
Enter strings to parse.Type ':r' to realize selected reading of previous parse.Type ':h' for help on display options and ':q' to quit.You can use the tab key for command completion, Ctrl-P (prev) and Ctrl-N (next) to access the command history, and emacs-style control keys to edit the line.
tccg> :h
Many options!
:sh show current preference settings :v verbose output :reset reset options to defaults :feats (L) show features (or just show features in list L) :nofeats don't show features :sem show semantics :nosem don't show semantics :all show all parse results :notall don't show all parse results :derivs show derivations :noderivs don't show derivations :vison (FN) turn visualization on (saving to file with name FN) :visoff turn visualization off
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
:noderivs :sem tccg> :noderivstccg> put the box near the red ball17 parses found.
:
Parse 7: s : @w0:action-non-motion(put ^ <Mood>imp ^ <Actor>(a1:entity ^ addressee) ^ <Patient>(w2:thing ^ box ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific) ^ <Result>(w3:m-whereto ^ near ^ <Anchor>(w6:thing ^ ball ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific ^ <Modifier>(w5:q-color ^ red))) ^ <Subject>a1:entity)
Tells you whatyou get: the meaning, (witha syntactic category of course)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
:noderivs :sem tccg> :noderivstccg> put the box near the red ball17 parses found.
:
Parse 7: s : @w0:action-non-motion(put ^ <Mood>imp ^ <Actor>(a1:entity ^ addressee) ^ <Patient>(w2:thing ^ box ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific) ^ <Result>(w3:m-whereto ^ near ^ <Anchor>(w6:thing ^ ball ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific ^ <Modifier>(w5:q-color ^ red))) ^ <Subject>a1:entity)
Tells you whatyou get: the meaning, (witha syntactic category of course)
Parse 7: s------------------------------(lex) put :- s\!np/pp/np(lex) the :- np/^n(lex) box :- n(>) the box :- np(>) put the box :- s\!np/pp(lex) near :- pp/^np(lex) the :- np/^n(lex) red :- adj(gram) typechange-5: adj$1 => n/n$1(typechange-5) red :- n/n(lex) ball :- n(>) red ball :- n(>) the red ball :- np(>) near the red ball :- pp(>) put the box near the red ball :- s\!np(gram) typechange-17: s\!np => s(typechange-17) put the box near the red ball :- s
:derivs :nosem
Tells you howyou get there: the derivation, with all the lexical entries and rulesthat have been applied
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: Single words for entities
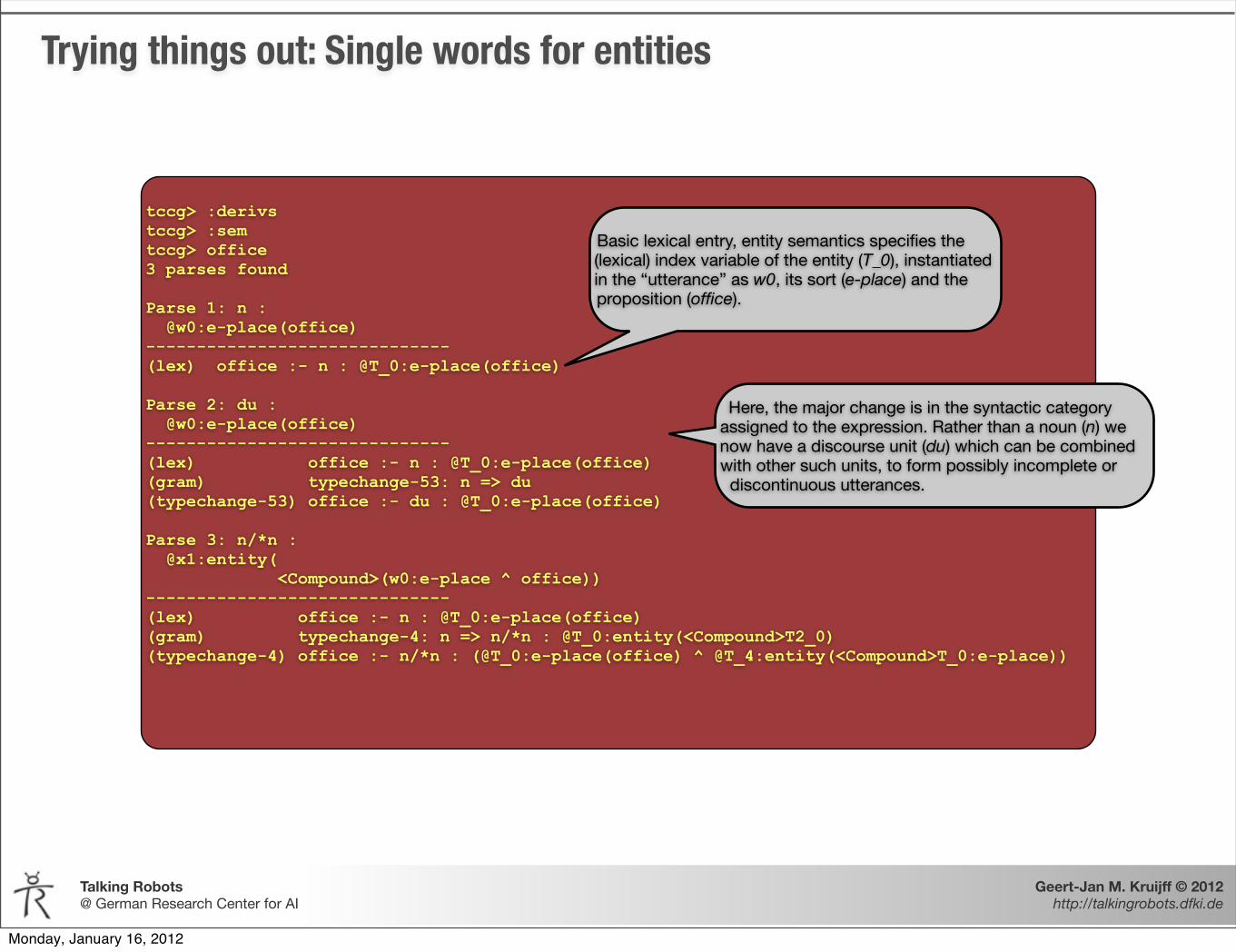
tccg> :derivstccg> :semtccg> office3 parses found
Parse 1: n : @w0:e-place(office)------------------------------(lex) office :- n : @T_0:e-place(office)
Parse 2: du : @w0:e-place(office)------------------------------(lex) office :- n : @T_0:e-place(office)(gram) typechange-53: n => du(typechange-53) office :- du : @T_0:e-place(office)
Parse 3: n/*n : @x1:entity( <Compound>(w0:e-place ^ office))------------------------------(lex) office :- n : @T_0:e-place(office)(gram) typechange-4: n => n/*n : @T_0:entity(<Compound>T2_0)(typechange-4) office :- n/*n : (@T_0:e-place(office) ^ @T_4:entity(<Compound>T_0:e-place))
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: Single words for entities
tccg> :derivstccg> :semtccg> office3 parses found
Parse 1: n : @w0:e-place(office)------------------------------(lex) office :- n : @T_0:e-place(office)
Parse 2: du : @w0:e-place(office)------------------------------(lex) office :- n : @T_0:e-place(office)(gram) typechange-53: n => du(typechange-53) office :- du : @T_0:e-place(office)
Parse 3: n/*n : @x1:entity( <Compound>(w0:e-place ^ office))------------------------------(lex) office :- n : @T_0:e-place(office)(gram) typechange-4: n => n/*n : @T_0:entity(<Compound>T2_0)(typechange-4) office :- n/*n : (@T_0:e-place(office) ^ @T_4:entity(<Compound>T_0:e-place))
Basic lexical entry, entity semantics specifies the (lexical) index variable of the entity (T_0), instantiated in the “utterance” as w0, its sort (e-place) and the proposition (office).
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: Single words for entities
tccg> :derivstccg> :semtccg> office3 parses found
Parse 1: n : @w0:e-place(office)------------------------------(lex) office :- n : @T_0:e-place(office)
Parse 2: du : @w0:e-place(office)------------------------------(lex) office :- n : @T_0:e-place(office)(gram) typechange-53: n => du(typechange-53) office :- du : @T_0:e-place(office)
Parse 3: n/*n : @x1:entity( <Compound>(w0:e-place ^ office))------------------------------(lex) office :- n : @T_0:e-place(office)(gram) typechange-4: n => n/*n : @T_0:entity(<Compound>T2_0)(typechange-4) office :- n/*n : (@T_0:e-place(office) ^ @T_4:entity(<Compound>T_0:e-place))
Basic lexical entry, entity semantics specifies the (lexical) index variable of the entity (T_0), instantiated in the “utterance” as w0, its sort (e-place) and the proposition (office).
Here, the major change is in the syntactic category assigned to the expression. Rather than a noun (n) we now have a discourse unit (du) which can be combined with other such units, to form possibly incomplete or
discontinuous utterances.
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: Single words for entities
tccg> :derivstccg> :semtccg> office3 parses found
Parse 1: n : @w0:e-place(office)------------------------------(lex) office :- n : @T_0:e-place(office)
Parse 2: du : @w0:e-place(office)------------------------------(lex) office :- n : @T_0:e-place(office)(gram) typechange-53: n => du(typechange-53) office :- du : @T_0:e-place(office)
Parse 3: n/*n : @x1:entity( <Compound>(w0:e-place ^ office))------------------------------(lex) office :- n : @T_0:e-place(office)(gram) typechange-4: n => n/*n : @T_0:entity(<Compound>T2_0)(typechange-4) office :- n/*n : (@T_0:e-place(office) ^ @T_4:entity(<Compound>T_0:e-place))
Basic lexical entry, entity semantics specifies the (lexical) index variable of the entity (T_0), instantiated in the “utterance” as w0, its sort (e-place) and the proposition (office).
Here, the major change is in the syntactic category assigned to the expression. Rather than a noun (n) we now have a discourse unit (du) which can be combined with other such units, to form possibly incomplete or
discontinuous utterances.
Finally, we see both syntactic category and semantic structure changed, to create a meaning in which “office” functions as part of a compound or multi-word expression, as e.g. in “the edge of GJ ‘s office door”
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: Entity descriptions
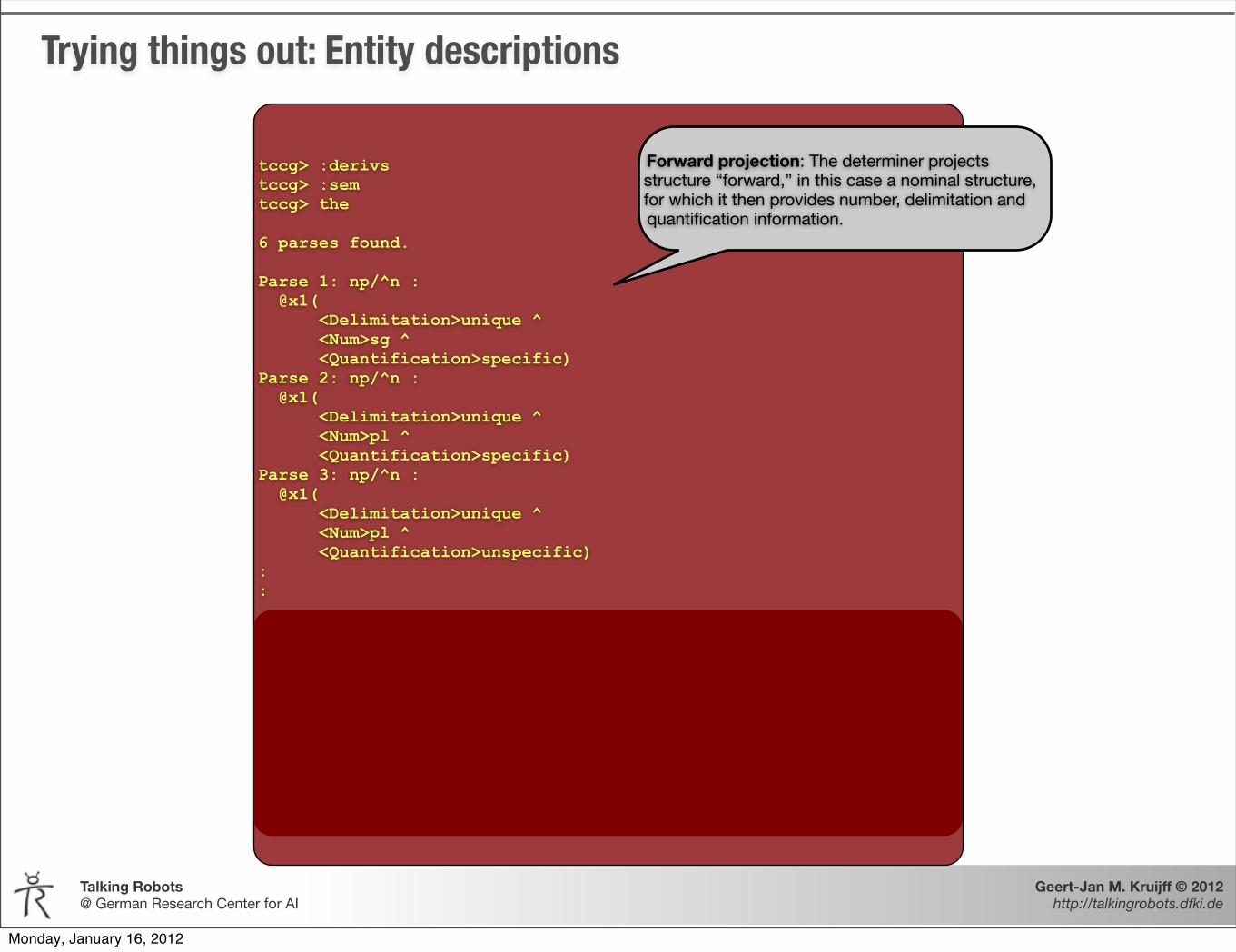
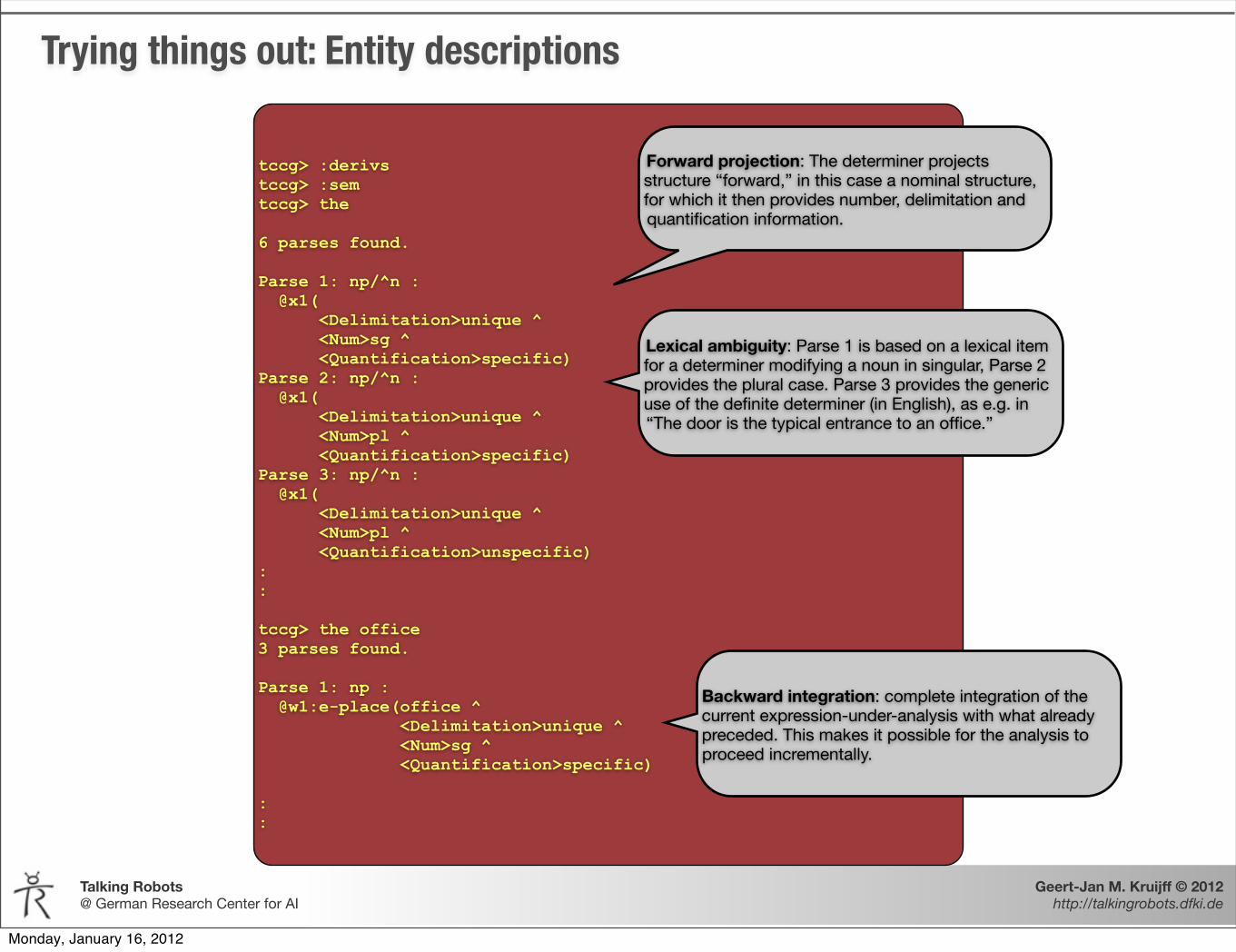
tccg> :derivstccg> :semtccg> the
6 parses found.
Parse 1: np/^n : @x1( <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)Parse 2: np/^n : @x1( <Delimitation>unique ^ <Num>pl ^ <Quantification>specific)Parse 3: np/^n : @x1( <Delimitation>unique ^ <Num>pl ^ <Quantification>unspecific)::
tccg> the office3 parses found.
Parse 1: np : @w1:e-place(office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)
::
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: Entity descriptions
tccg> :derivstccg> :semtccg> the
6 parses found.
Parse 1: np/^n : @x1( <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)Parse 2: np/^n : @x1( <Delimitation>unique ^ <Num>pl ^ <Quantification>specific)Parse 3: np/^n : @x1( <Delimitation>unique ^ <Num>pl ^ <Quantification>unspecific)::
tccg> the office3 parses found.
Parse 1: np : @w1:e-place(office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)
::
Forward projection: The determiner projects structure “forward,” in this case a nominal structure, for which it then provides number, delimitation and quantification information.
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: Entity descriptions
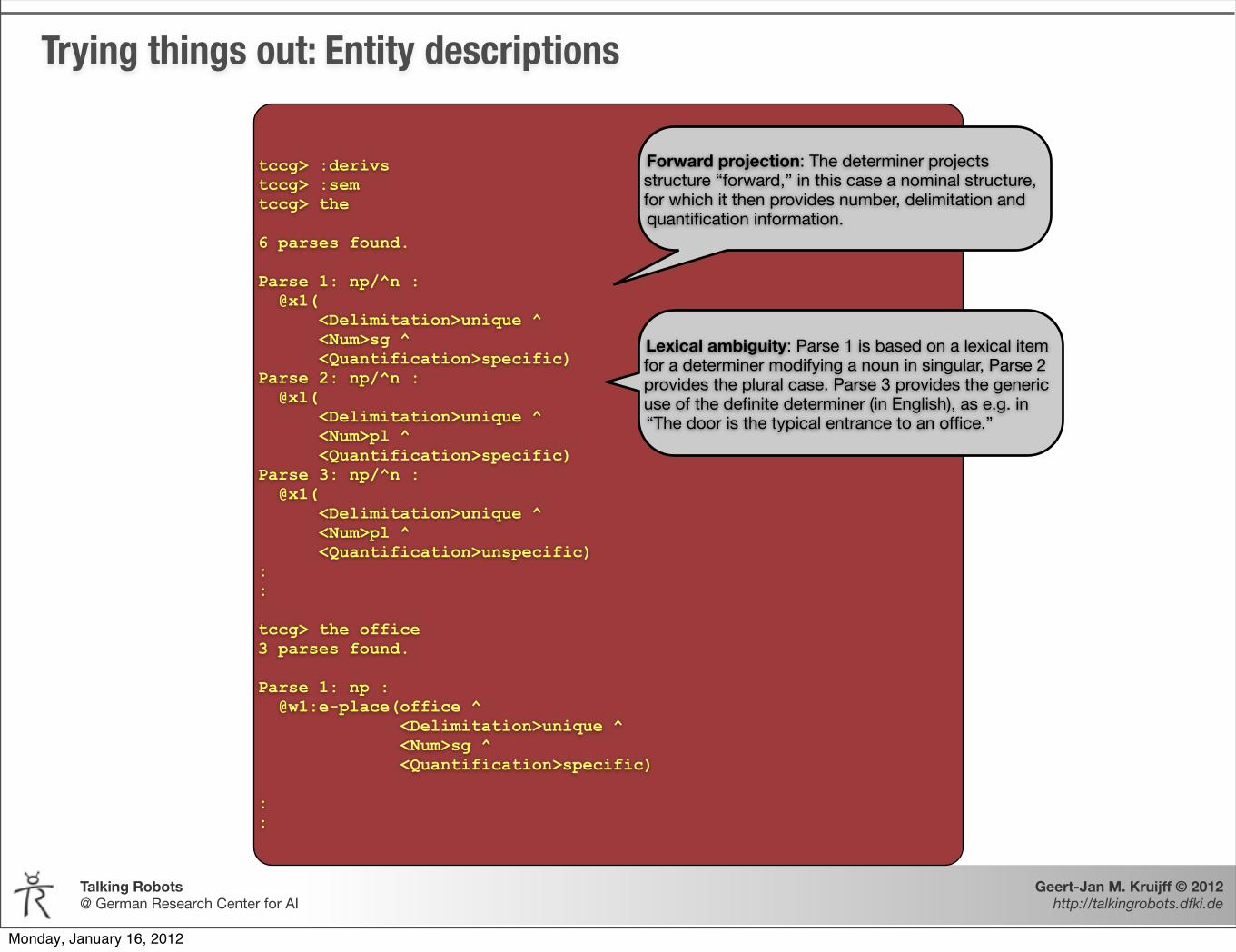
tccg> :derivstccg> :semtccg> the
6 parses found.
Parse 1: np/^n : @x1( <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)Parse 2: np/^n : @x1( <Delimitation>unique ^ <Num>pl ^ <Quantification>specific)Parse 3: np/^n : @x1( <Delimitation>unique ^ <Num>pl ^ <Quantification>unspecific)::
tccg> the office3 parses found.
Parse 1: np : @w1:e-place(office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)
::
Forward projection: The determiner projects structure “forward,” in this case a nominal structure, for which it then provides number, delimitation and quantification information.
Lexical ambiguity: Parse 1 is based on a lexical item for a determiner modifying a noun in singular, Parse 2 provides the plural case. Parse 3 provides the generic use of the definite determiner (in English), as e.g. in “The door is the typical entrance to an office.”
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: Entity descriptions
tccg> :derivstccg> :semtccg> the
6 parses found.
Parse 1: np/^n : @x1( <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)Parse 2: np/^n : @x1( <Delimitation>unique ^ <Num>pl ^ <Quantification>specific)Parse 3: np/^n : @x1( <Delimitation>unique ^ <Num>pl ^ <Quantification>unspecific)::
tccg> the office3 parses found.
Parse 1: np : @w1:e-place(office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)
::
Forward projection: The determiner projects structure “forward,” in this case a nominal structure, for which it then provides number, delimitation and quantification information.
Lexical ambiguity: Parse 1 is based on a lexical item for a determiner modifying a noun in singular, Parse 2 provides the plural case. Parse 3 provides the generic use of the definite determiner (in English), as e.g. in “The door is the typical entrance to an office.”
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: Entity descriptions
tccg> :derivstccg> :semtccg> the
6 parses found.
Parse 1: np/^n : @x1( <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)Parse 2: np/^n : @x1( <Delimitation>unique ^ <Num>pl ^ <Quantification>specific)Parse 3: np/^n : @x1( <Delimitation>unique ^ <Num>pl ^ <Quantification>unspecific)::
tccg> the office3 parses found.
Parse 1: np : @w1:e-place(office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)
::
Forward projection: The determiner projects structure “forward,” in this case a nominal structure, for which it then provides number, delimitation and quantification information.
Lexical ambiguity: Parse 1 is based on a lexical item for a determiner modifying a noun in singular, Parse 2 provides the plural case. Parse 3 provides the generic use of the definite determiner (in English), as e.g. in “The door is the typical entrance to an office.”
Backward integration: complete integration of the current expression-under-analysis with what already preceded. This makes it possible for the analysis to proceed incrementally.
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: Entity descriptions with modifierstccg> :derivstccg> :semtccg> GJ 's big office3 parses found.
Parse 1: np : @w3:e-place(office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific ^ <Modifier>(w2:q-size ^ big) ^ <Owner>(w0:person ^ GJ))Parse 2: du : @w3:e-place(office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific ^ <Modifier>(w2:q-size ^ big) ^ <Owner>(w0:person ^ GJ)):
tccg> GJ 's big office at the end of the hall3 parses found.
Parse 1: np : @w3:e-place(office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific ^ <Modifier>(w2:q-size ^ big) ^ <Modifier>(w4:m-location ^ at ^ <Anchor>(w6:e-region ^ end ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific ^ <Owner>(w9:e-place ^ hall ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific))) ^ <Owner>(w0:person ^ GJ))
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: Entity descriptions with modifierstccg> :derivstccg> :semtccg> GJ 's big office3 parses found.
Parse 1: np : @w3:e-place(office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific ^ <Modifier>(w2:q-size ^ big) ^ <Owner>(w0:person ^ GJ))Parse 2: du : @w3:e-place(office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific ^ <Modifier>(w2:q-size ^ big) ^ <Owner>(w0:person ^ GJ)):
tccg> GJ 's big office at the end of the hall3 parses found.
Parse 1: np : @w3:e-place(office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific ^ <Modifier>(w2:q-size ^ big) ^ <Modifier>(w4:m-location ^ at ^ <Anchor>(w6:e-region ^ end ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific ^ <Owner>(w9:e-place ^ hall ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific))) ^ <Owner>(w0:person ^ GJ))
Modifiers: Particularly for entity descriptions, modifiers are (mostly) modeled by Modifier relations. Distinguishing modifiers is done by looking at the type of information provided (e.g. q-size, meaning size)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: Entity descriptions with modifierstccg> :derivstccg> :semtccg> GJ 's big office3 parses found.
Parse 1: np : @w3:e-place(office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific ^ <Modifier>(w2:q-size ^ big) ^ <Owner>(w0:person ^ GJ))Parse 2: du : @w3:e-place(office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific ^ <Modifier>(w2:q-size ^ big) ^ <Owner>(w0:person ^ GJ)):
tccg> GJ 's big office at the end of the hall3 parses found.
Parse 1: np : @w3:e-place(office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific ^ <Modifier>(w2:q-size ^ big) ^ <Modifier>(w4:m-location ^ at ^ <Anchor>(w6:e-region ^ end ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific ^ <Owner>(w9:e-place ^ hall ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific))) ^ <Owner>(w0:person ^ GJ))
Modifiers: Particularly for entity descriptions, modifiers are (mostly) modeled by Modifier relations. Distinguishing modifiers is done by looking at the type of information provided (e.g. q-size, meaning size)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Verbs
Verbal structure
Grammatical subject
Verb frame-specific roles: Actor, Patient, Beneficiary, ...
Features indicating Tense, Aspect, Mood; (Modality is a Modifier)
Specific case: Copula verb “to be”
Ascription use: “The mug is green,” “Where is the mug”
Presentation use: “There is a mug on the table”
Relational structure using Cop-Restr and Cop-Scope, based on Partee’s tripartite structure
Design principles
Again, facilitate backward integration and forward projection
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: basic action verb structure
tccg> :noderivstccg> go15 parses found.
Parse 1: adv : @w0:m-manner(go):Parse 12: s : @w0:action-motion(go ^ <Mood>imp ^ <Actor>(a1:entity ^ addressee) ^ <Subject>a1:entity):tccg>
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: basic action verb structure
tccg> go to the office4 parses found.
Parse 1: s : @w0:action-motion(go ^ <Mood>imp ^ <Actor>(a1:entity ^ addressee) ^ <Modifier>(w1:m-whereto ^ to ^ <Anchor>(w3:e-place ^ office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)) ^ <Subject>a1:entity)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: basic action verb structure
tccg> go to the office4 parses found.
Parse 1: s : @w0:action-motion(go ^ <Mood>imp ^ <Actor>(a1:entity ^ addressee) ^ <Modifier>(w1:m-whereto ^ to ^ <Anchor>(w3:e-place ^ office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)) ^ <Subject>a1:entity)
Imperative use of the verb. The actor (and the grammatical subject) of the construction is defined contextually, as the addressee of the utterance.
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: basic action verb structure
tccg> could you go to the office7 parses found.
Parse 1: s : @w2:action-motion(go ^ <Mood>int ^ <Actor>(w1:person ^ you ^ <Num>sg) ^ <Modifier>(w0:modal ^ could) ^ <Modifier>(w3:m-whereto ^ to ^ <Anchor>(w5:e-place ^ office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)) ^ <Subject>w1:person)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: basic action verb structure
tccg> could you go to the office7 parses found.
Parse 1: s : @w2:action-motion(go ^ <Mood>int ^ <Actor>(w1:person ^ you ^ <Num>sg) ^ <Modifier>(w0:modal ^ could) ^ <Modifier>(w3:m-whereto ^ to ^ <Anchor>(w5:e-place ^ office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)) ^ <Subject>w1:person)
Interrogative use of the verb. The actor (and the grammatical subject) of the construction is given explicitly in the utterance.
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: basic action verb structure
tccg> could you go to the office7 parses found.
Parse 1: s : @w2:action-motion(go ^ <Mood>int ^ <Actor>(w1:person ^ you ^ <Num>sg) ^ <Modifier>(w0:modal ^ could) ^ <Modifier>(w3:m-whereto ^ to ^ <Anchor>(w5:e-place ^ office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)) ^ <Subject>w1:person)
tccg> can you go to the office7 parses found.
Parse 1: s : @w2:action-motion(go ^ <Mood>int ^ <Tense>pres ^ <Actor>(w1:person ^ you ^ <Num>sg) ^ <Modifier>(w0:modal ^ can) ^ <Modifier>(w3:m-whereto ^ to ^ <Anchor>(w5:e-place ^ office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)) ^ <Subject>w1:person)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: basic action verb structure
tccg> could you go to the office7 parses found.
Parse 1: s : @w2:action-motion(go ^ <Mood>int ^ <Actor>(w1:person ^ you ^ <Num>sg) ^ <Modifier>(w0:modal ^ could) ^ <Modifier>(w3:m-whereto ^ to ^ <Anchor>(w5:e-place ^ office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)) ^ <Subject>w1:person)
tccg> can you go to the office7 parses found.
Parse 1: s : @w2:action-motion(go ^ <Mood>int ^ <Tense>pres ^ <Actor>(w1:person ^ you ^ <Num>sg) ^ <Modifier>(w0:modal ^ can) ^ <Modifier>(w3:m-whereto ^ to ^ <Anchor>(w5:e-place ^ office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)) ^ <Subject>w1:person)
Interrogative use of the verb. The actor (and the grammatical subject) of the construction is given explicitly in the utterance.
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: basic action verb structure
tccg> could you go to the office7 parses found.
Parse 1: s : @w2:action-motion(go ^ <Mood>int ^ <Actor>(w1:person ^ you ^ <Num>sg) ^ <Modifier>(w0:modal ^ could) ^ <Modifier>(w3:m-whereto ^ to ^ <Anchor>(w5:e-place ^ office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)) ^ <Subject>w1:person)
tccg> can you go to the office7 parses found.
Parse 1: s : @w2:action-motion(go ^ <Mood>int ^ <Tense>pres ^ <Actor>(w1:person ^ you ^ <Num>sg) ^ <Modifier>(w0:modal ^ can) ^ <Modifier>(w3:m-whereto ^ to ^ <Anchor>(w5:e-place ^ office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)) ^ <Subject>w1:person)
Interrogative use of the verb. The actor (and the grammatical subject) of the construction is given explicitly in the utterance.
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: basic action verb structure
tccg> could you go to the office7 parses found.
Parse 1: s : @w2:action-motion(go ^ <Mood>int ^ <Actor>(w1:person ^ you ^ <Num>sg) ^ <Modifier>(w0:modal ^ could) ^ <Modifier>(w3:m-whereto ^ to ^ <Anchor>(w5:e-place ^ office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)) ^ <Subject>w1:person)
tccg> can you go to the office7 parses found.
Parse 1: s : @w2:action-motion(go ^ <Mood>int ^ <Tense>pres ^ <Actor>(w1:person ^ you ^ <Num>sg) ^ <Modifier>(w0:modal ^ can) ^ <Modifier>(w3:m-whereto ^ to ^ <Anchor>(w5:e-place ^ office ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)) ^ <Subject>w1:person)
Interrogative use of the verb. The actor (and the grammatical subject) of the construction is given explicitly in the utterance.
Observe that here the Tense is made explicit, whereas in the above example this is left implicit.
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: ambiguity in verb structure
tccg> put the ball near the box to the left of the computer44 parses found.
Parse 19: s : @w0:action-non-motion(put ^ <Mood>imp ^ <Actor>(a1:entity ^ addressee) ^ <Patient>(w2:thing ^ ball ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific) ^ <Result>(w3:m-whereto ^ near ^ <Anchor>(w5:thing ^ box ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific ^ <Modifier>(w6:m-location ^ to ^ <Anchor>(w8:e-region ^ left ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific ^ <Owner>(w11:thing ^ computer ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific))))) ^ <Subject>a1:entity)Parse 20: s : @w0:action-non-motion(put ^ <Mood>imp ^ <Actor>(a1:entity ^ addressee) ^ <Modifier>(w6:m-location ^ to ^ <Anchor>(w8:e-region ^ left ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific ^ <Owner>(w11:thing ^ computer ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific))) ^ <Patient>(w2:thing ^ ball ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific) ^ <Result>(w3:m-whereto ^ near ^ <Anchor>(w5:thing ^ box ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific)) ^ <Subject>a1:entity)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: Copula constructions
Copula “to be”
Something is predicated (Cop-Scope) over something (Cop-Restr)
Ascription: Ascribing a property to an entity, “the mug is green”
Presentation: Situating an entity, “there is a mug there”
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: Copula constructions
Copula “to be”
Something is predicated (Cop-Scope) over something (Cop-Restr)
Ascription: Ascribing a property to an entity, “the mug is green”
Presentation: Situating an entity, “there is a mug there”
tccg> the mug is blue10 parses found.
Parse 2: s : @w2:ascription(be ^ <Mood>ind ^ <Tense>pres ^ <Cop-Restr>(w1:thing ^ mug ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific) ^ <Cop-Scope>(w3:q-color ^ blue) ^ <Subject>w1:thing)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Trying things out: Copula constructions
Copula “to be”
Something is predicated (Cop-Scope) over something (Cop-Restr)
Ascription: Ascribing a property to an entity, “the mug is green”
Presentation: Situating an entity, “there is a mug there”
tccg> the mug is blue10 parses found.
Parse 2: s : @w2:ascription(be ^ <Mood>ind ^ <Tense>pres ^ <Cop-Restr>(w1:thing ^ mug ^ <Delimitation>unique ^ <Num>sg ^ <Quantification>specific) ^ <Cop-Scope>(w3:q-color ^ blue) ^ <Subject>w1:thing)
tccg> there is a mug there31 parses found.
Parse 1: s : @w1:presentational(be ^ <Mood>ind ^ <Tense>pres ^ <Modifier>(w0:m-location ^ context ^ <Proximity>m-distal) ^ <Presented>(w3:thing ^ mug ^ <Delimitation>existential ^ <Num>sg ^ <Quantification>specific ^ <Modifier>(w4:m-location ^ context ^ <Proximity>m-distal)))
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Exercises
Testsuite
To add an expression to a test suite (in tccg): :2tb XYZ.xml
The number of parses obtained in tccg is stored as the target in the test suite
To run all the examples in a test suite (cmd line): % ccg-test tb.xml
Exercises for MOLOKO
Extend the dictionary with entries for “staircase”, “stairs”, “victim”
Extend the dictionary with entries for “drive”, “enter”, “shall”
Create an OpenCCG XML distribution using moloko-FULL
Create a test suite for the utterances from “talking+acting” (slide#45)
Devise a (simple!) decision structure for modeling how to distinguish between (almost all of) the different readings
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Content planning
What is content planning?
Determining what content to convey,
in a sub-dialogue, possibly just an utterance
(Content aggregation and -distribution)
What does content planning start from?
Planning starts from a goal,
specifying what is to be conveyed.
What is a goal?
We specify a goal as a proto-logical form,
including the basic structure and contextual informationfor which the full logical form is to be generated
(This does not exclude access to external sources!)
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
CPLAN in Tarot
Logical Forms as Graphs
A CCG logical form can be interpreted as an acyclic graph:
@d1:dvp(<Content>(c1:ascription ^<Cop-Scope>(cs1:type ^ <Questioned>true))
<Wh-Restr>(:specifier ^ what ^ <Scope> (cs1:type)))
d1
dvp
ascription
c1
specifier
what
cs1
type
true
ID
TYPE
Content
Wh-Restr
ID
TYPE
Cop-Scope
TYPE
PROP
Scope
ID
TYPE
Questioned
Slide courtesy of Bernd KieferFull presentation at Tarot
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
CPLAN in Tarot
The content planner as a rule system
The planner uses a set of transformation rules which specify local modifications (to a logical form as graph)
The planner processes these rules with an engine which applies the rules to all sub-parts of the logical form, (following a specific strategy)
Transformation rules: Antecedent and consequent
The match part of a rule specifies what shape some substructure of the graph must exhibit to have the rule apply
The action part specifies the modifications to parts of the substructure
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
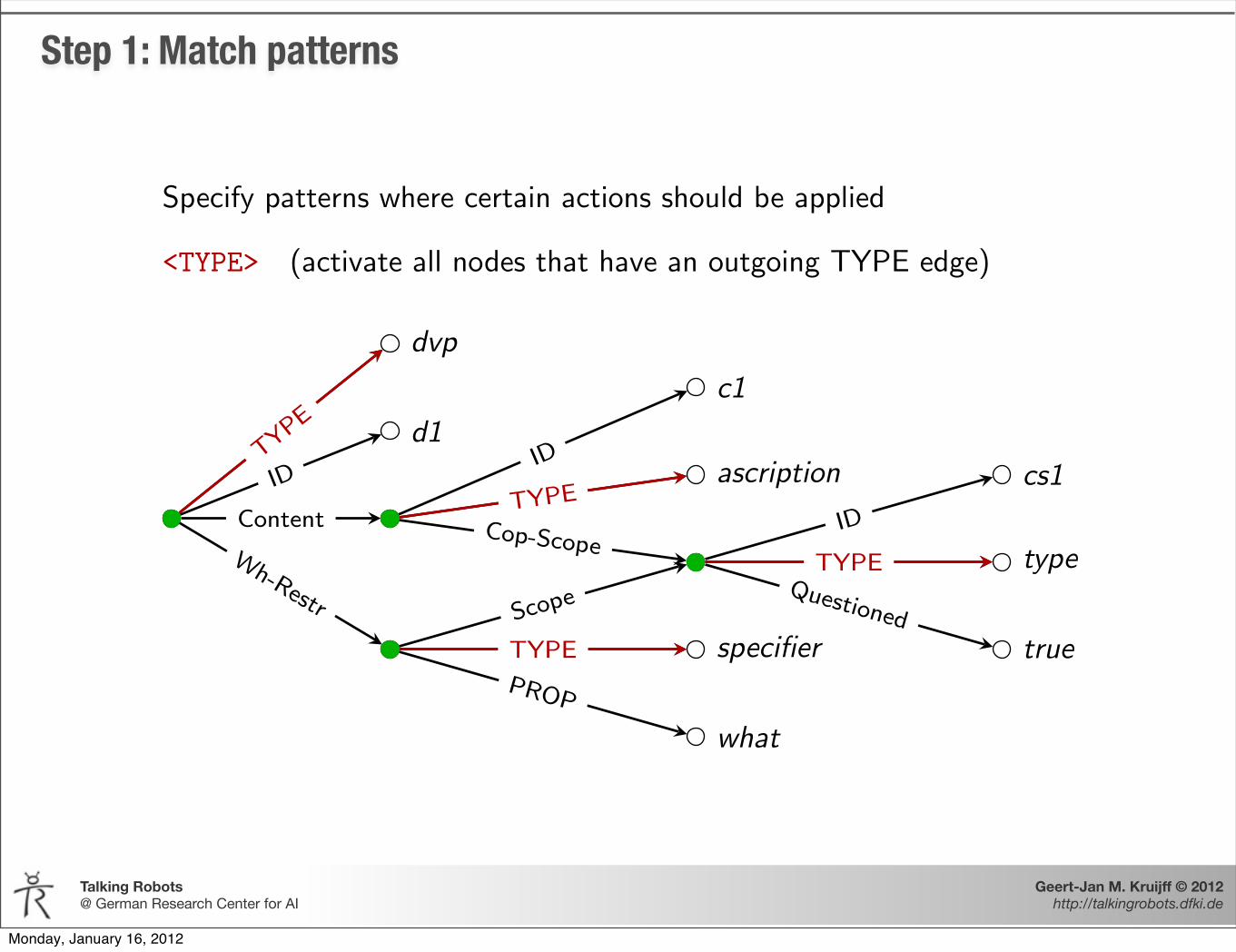
Step 1: Match patternsStep 1: Match Patterns
Specify patterns where certain actions should be applied
<TYPE> (activate all nodes that have an outgoing TYPE edge)
d1
dvp
ascription
c1
specifier
what
cs1
type
true
ID
TYPE
Content
Wh-Restr
ID
TYPE
Cop-Scope
TYPE
PROP
Scope
ID
TYPE
Questioned
TYPE
TYPE
TYPE
TYPE
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Step 1: Match patternsStep 1: Match Patterns
Specify patterns where certain actions should be applied
<TYPE> ascription (alternatively: :ascription)
d1
dvp
ascription
c1
specifier
what
cs1
type
true
ID
TYPE
Content
Wh-Restr
ID
TYPE
Cop-Scope
TYPE
PROP
Scope
ID
TYPE
Questioned
TYPEascription
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
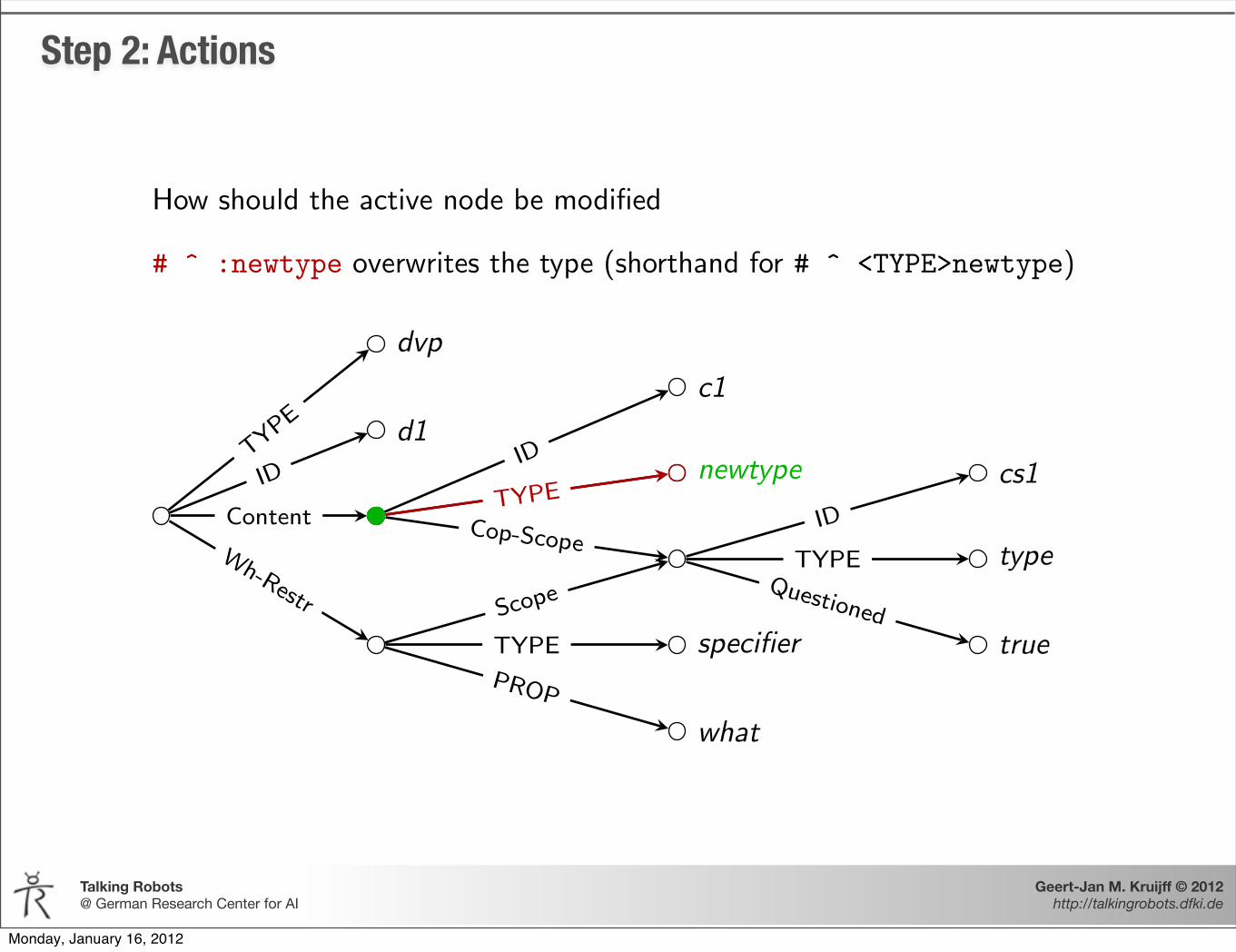
Step 2: ActionsStep 2: Actions
How should the active node be modified
# ^ :newtype overwrites the type (shorthand for # ^ <TYPE>newtype)
d1
dvp
ascription
c1
specifier
what
cs1
type
true
ID
TYPE
Content
Wh-Restr
ID
TYPE
Cop-Scope
TYPE
PROP
Scope
ID
TYPE
Questioned
TYPE
Monday, January 16, 2012
Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Step 2: ActionsStep 2: Actions
How should the active node be modified
# ^ :newtype overwrites the type (shorthand for # ^ <TYPE>newtype)
d1
dvp
c1
specifier
what
cs1
type
true
ID
TYPE
Content
Wh-Restr
ID
TYPE
Cop-Scope
TYPE
PROP
Scope
ID
TYPE
Questioned
TYPEnewtype
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Content planning: Proto logical forms
Proto-LFs specify intent and content
Some of the content provided ends up in the result,
other content is just there to drive the “decision making process” (captured by the transformation rules)
Between planning and realization
When writing rules for obtaining a particular outcome,
make sure that the resulting logical form exactly describes the content needed for the realizer: Not more, not less!
(Over- or underspecified logical forms are not realized by the OpenCCG realizer)
Therefore, make sure rules “clean up” meta-level content
Monday, January 16, 2012

Talking Robots@ German Research Center for AI
Geert-Jan M. Kruijff © 2012 http://talkingrobots.dfki.de
Exercises
Read the documentation
Content planner: General documentation for the GUI, and more detailed technical tutorial slides
Implement a planning rules for the “enter the office” suite
Try to cover at least 6 different examples, (statements and requests)
Start from a proto logical form for the action,
with a feature to indicate the (surface) intention (e.g. statement vs. request)
and possibly any other meta-level features you need to differentiate between the LFs
Have (simple) rules for simple expansions (e.g. subject, actor, ...) to create common structure
Design rules to introduce intention/function-specific content, to obtain the selection of different examples
Keep the number of meta-features to a minimum; vary in feature-values instead
Monday, January 16, 2012