target tracking using wsn vinod kulathumani west virginia university
TRANSCRIPT

Target tracking using WSN
Vinod Kulathumani
West Virginia University

2
Influence field (IF)
• IF of object j wrt given sensing modality: region wherein j can be detected by a sensor of this type
Experimentally measured soldier and vehicle influence fields wrt magnetometer
o Characterized by size and shape which depends on physical characteristics of object
o With sufficient density, estimating IF reduces to measuring number and distribution of sensors detecting j

3
Influence field (2)
• Differences in sizes and/or shapes of estimated influence fields form basis for classification and tracking of objects
• Influence Field Estimation
node-friendly
each node inside influence field only has to detect presence of object
network-friendly
each detecting node transmits only one time-stamped presence bit to the aggregator
robust
inherently spatially distributed, hence tolerant to individual sensor failures
4
Tracking using influence field
• Limits for resolution apply here also
localization patches can be formed based on detecting and non detecting
sensors to track objects
• We use different approach
locate object at centroid of estimated influence field
in discrete scenarios
consider convex region containing all sensors
object tracked at centroid of this region
computation and representation are simpler – works easily for 2d also
what is lost?
what is the spatial resolution we obtain?

5
Tracking using influence field
• Model
only 1 type of object
all sensors within distance R and none beyond distance R of object
detect objectObject
R

6
Tracking using influence field
• Tracking by centroid
low computational and representative complexity
does not consider negative information
Object
Object estimated

7
Differential Games on Large Scale Sensor Networks

8
Differential Games
• Dynamic Interaction of Agents with Conflicting Interests [Isaacs 75]
Pursuit Evasion Games
Asset Protection
Economy
• Classical Theory assumes global state of the game is observable by the players at all times.
Target

9
Tracking and Pursuit with Sensor Networks
• We study Differential Games when players track the game state through a WSN
•Formulate Solution and Equilibrium Concepts for Networked Games
•Derive Network Requirements for Optimal Pursuit

10
Tracking and Pursuit with Sensor Networks
• Main Results:
Network Requirements for Optimal Pursuit depends on the game state.
Optimal Pursuit in the Asset Protection Game requires the sampling
period and the network delays to scale linearly with the pursuer and evader distance
The pursuer should be able to dictate the information refresh rate based on the state of the game. Network Delay Performance should improve with decreasing distance between source and sink

11
Optimal Pursuit under Communication ConstraintsDiscrete Time Updates
•Optimal pursuit-evasion strategies of the perfect information game is the Nash equilibrium of the game with discrete time updates if

12
Optimal Pursuit under Communication ConstraintsDiscrete Time Updates
13
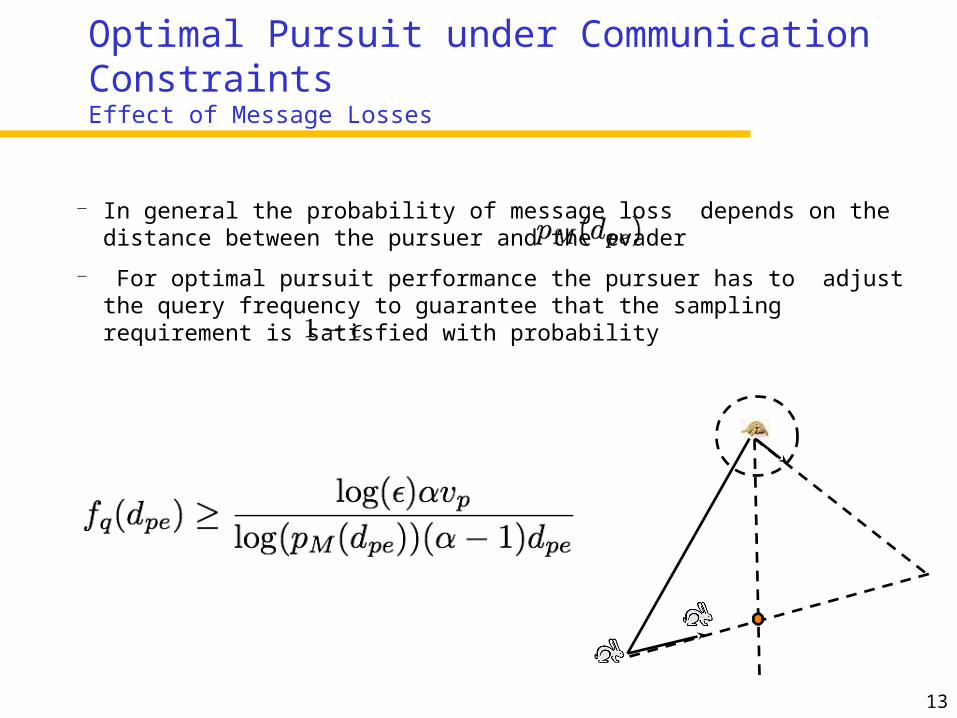
In general the probability of message loss depends on the distance between the pursuer and the evader
For optimal pursuit performance the pursuer has to adjust the query frequency to guarantee that the sampling requirement is satisfied with probability
Optimal Pursuit under Communication ConstraintsEffect of Message Losses

14
• Optimal pursuit-evasion strategies of the perfect information game is the Nash equilibrium of the game with delayed information
Optimal Pursuit under Communication ConstraintsNetwork Delays

Trail: network service for tracking

16
Motivating scenario
Mobile Objects tracked by network of static sensors over a large area Network runs a tracking service Application (residing on mobile objects) issues query of the
form “Find object X” to the tracking service

17
Motivation for Trail
• Queries answered by one (or more) central nodes not scalable
Depletes energy
Increases latency
• One way to make queries local
Publish object state everywhere
But upon every move, global update needed
• Global update for every object move not scalable
• We need to publish object information systematically

18
Informal problem statement
Network tracking service returns query results in time and work proportional to distance from object
Requirement 1: Find distance sensitivity
When an object moves, tracking protocol updates the track in time and work proportional to distance moved
Requirement 2: Update distance sensitivity
19
Trail tracking structure
• Trail protocol based on geometric ideas
Properties proved on continuous 2-d plane
Then implemented on discrete plane
• Model
2-d real bounded plane, C denotes center of this plane
Cost measured in Euclidean distance
• One track maintained for each object
Let P be object being tracked located at point p
Tracking data structure for P denoted as trailP
Pointers that lead to current location of P
• All tracks rooted at C

20
Trail intuition
• If trailP restricted to be a straight line, each move will involve update from C
C
p’
p
Instead, trailP marked with vertices on-the-fly Vertices serve as anchor points for update Distance between vertices increases exponentially
moving towards C Anchor updated depending on distance moved After sufficiently large distance, update from C

21
Examples of trailP
C
N3
N2
p
N1
c3
c2
c1
N3
N2
p
N1
c3
c2
c1
C
N3
N2
p
N1
c3
c2
c1
CC
N3
N2
p
N1
c3
c2
c1
N3
N2
N1
c3
c2c1
p
CC
N3
N2
p
N1
c3
c2c1
22
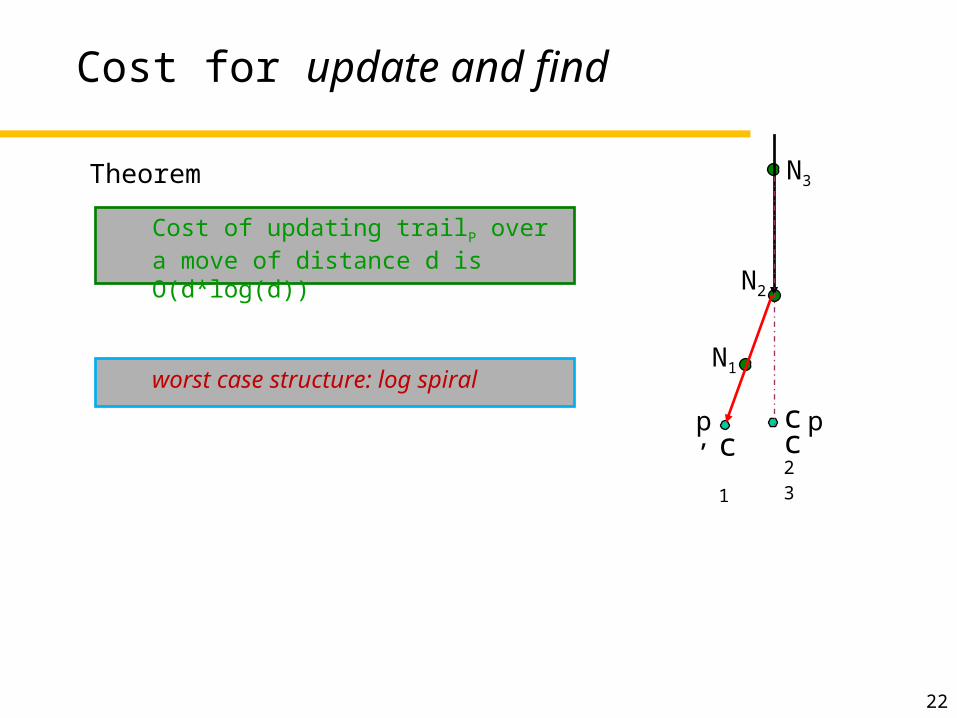
Cost for update and find
Cost of updating trailP over a move of distance d is O(d*log(d))
Theorem N3
N2
p’
N1
c3
c2
c1
p
worst case structure: log spiral

23
Algorithm for find
Cost of finding P from object Q at point q is O(d) where d is dist(p,q)
Theorem
C
p c2
N3
N2
N1
c3
q
m
Draw successive circles of radii 20, 21, 22 .. 2(log
dist(C,q)) Until trailP is intersected Or reach C
Follow trailP to reach current location of P
Cost includes reaching trailP, following trailP, returning to q

24
Fault-tolerance and adaptivity of Trail
• Fault-tolerance
Nodes may fail after creating trail or old trails may not be deleted
Self-stabilizing actions using heartbeats along trail structure
Tolerating failures during update and find
Route around failures using a method such as left hand rule in GPSR
As size of holes increases, update and find cost proportionally increase
Trail supports graceful degradation
• Adaptivity (Trail yields family of protocols)
Can be tuned based on update and query frequency
When query frequency higher, publish structure increases and find increasingly straight
Extreme case – find is a straight line to C and publish in circles

25
Performance evaluation
• Experimental evaluation (Kansei testbed at OSU)
Used to demonstrate PE tracking application for NEST DARPA project
Intruder tracks collected from Richmond Field Station [140m X 60m]
Tracks injected into Kansei testbed nodes to emulate motion of evaders
15 X 7 node network, 3 ft spacing
3 pursuer 3 evader scenario
Study effect of interference on scaling in
Objects [2 - 10]
Query frequency [0.25 – 1 Hz]
• Simulations [JProwler]
8100 nodes (90 by 90)
Up to 50 objects (uniformly separated and collocated)
Garcia Robots as Pursuers

26
Summary of Trail features
• Trail – a distance sensitive network service
Assumes no hierarchical partitioning of network O(d) find time, cost for object distance d away O(d*log(d)) update time, cost for distance d moved Fault-tolerant
Self-stabilizing, graceful degradation
• When many objects come close together, network interference can cause delay
Synchronized push version? Distance sensitive snapshot service

Distance sensitive snapshot service
A brief overview

28
Informal problem statement
Given
• N nodes, with bounded memory, in f dimensions
• each can sense m-bit information at any time
• each can communicate at W bits per second
Deliver a global snapshot
• at each node (can be relaxed to a subset)
• that uniformly has distance sensitive latency (and distance sensitive resolution, and distance sensitive rate)
State of nearby nodes is fresher
State of nearby nodes more precise
State of nearby nodes refreshed more often
• periodically, as fast as possible (can be relaxed to lower rate)

29
Illustration

30
Illustration

31
Results
Maximum staleness in state of a node i received by a
snapshot at node j is O(log(n) * m * d) where d = dist(i, j)
Resolution of state of a node i in a snapshot received at node
j is Ω(1 / d2) where d = dist(i, j)
Communication cost to deliver a snapshot of one sample
from each node to all nodes is on average O(N * log(n) * m)