team cnh design a less expensive propulsion control system with equivalent or better performance...
Post on 21-Dec-2015
216 views
TRANSCRIPT
Team CNH
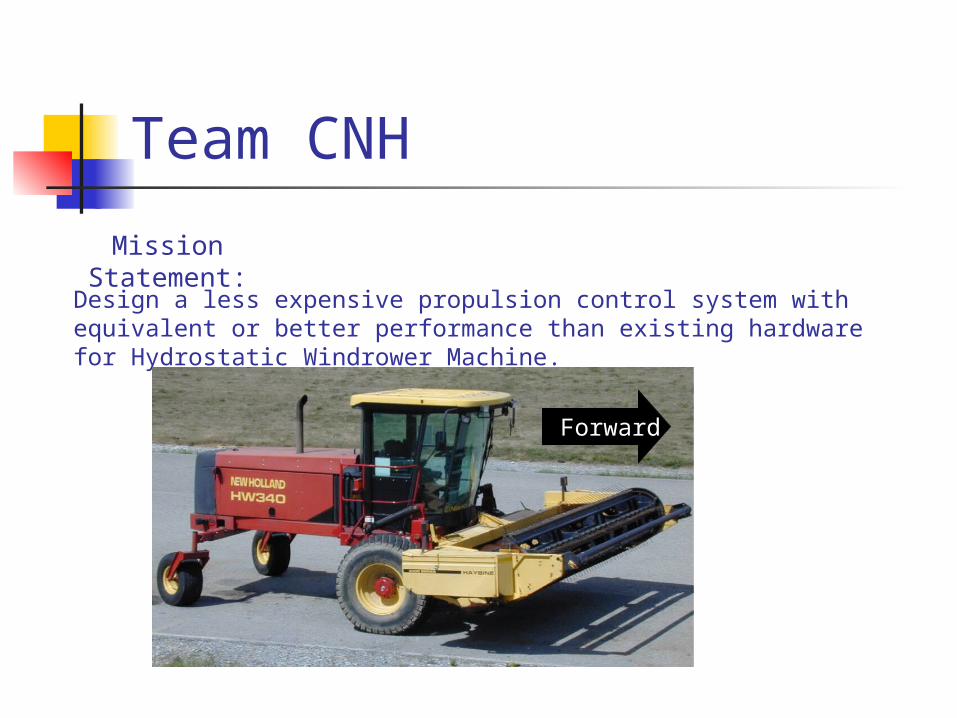
Design a less expensive propulsion control system with equivalent or better performance than existing hardware for Hydrostatic Windrower Machine.
Mission Statement:
Forward

Customer Wants
Low Cost Very Reliable Easy to Use Easy Maintenance High Level of Accuracy Comfortable to Use Minimal Machine Redesign Highly Repeatable Continued Operation Ability High Perception of Safety

Constraints
System Must Be Safe System Must Meet all ASAE Codes Total System < $300.00

Benchmarking
Current CNH System
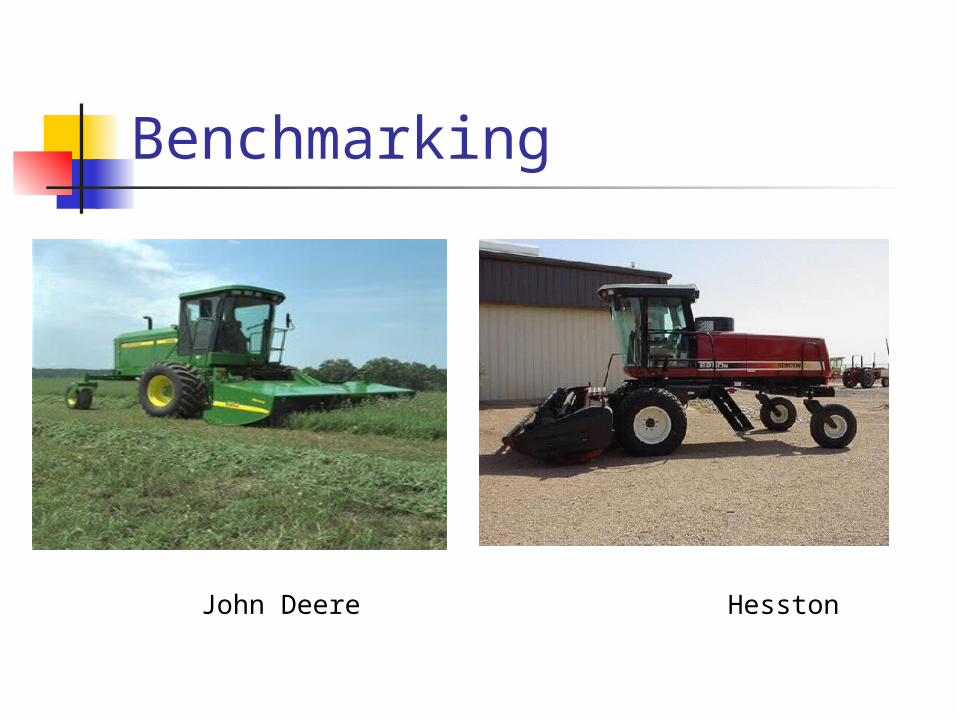
Benchmarking
John Deere Hesston

Design Metrics Time to Reach Neutral Total Cost Response Time Serviceability Index Component Effects Energy Usage Repeatability Rate Number of Parts Changed

Design Target Values Stopping Time < 10 Seconds Total Cost < $250.00 Response Time < ¼ Second Serviceability Index < 237 12 Volt System, Draw < 30 Amps Mean Time Between Failures > 3,240
Hours Number of Parts Replaced <4
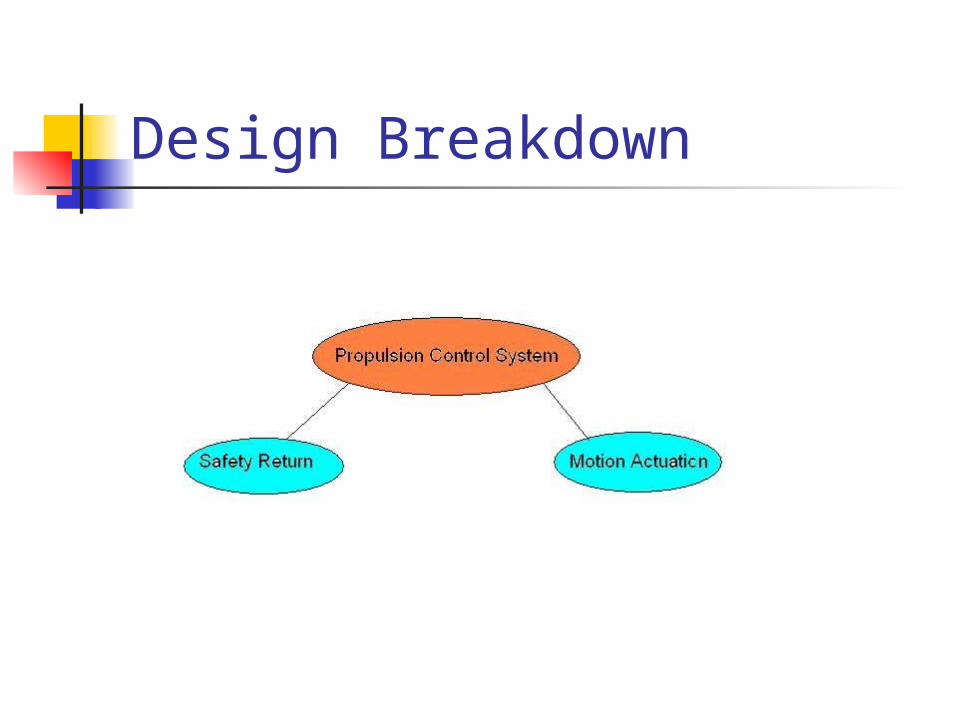
Design Breakdown

Motion Actuation

Motion Actuation
Concept 1- Rotary Actuator

Motion Actuation
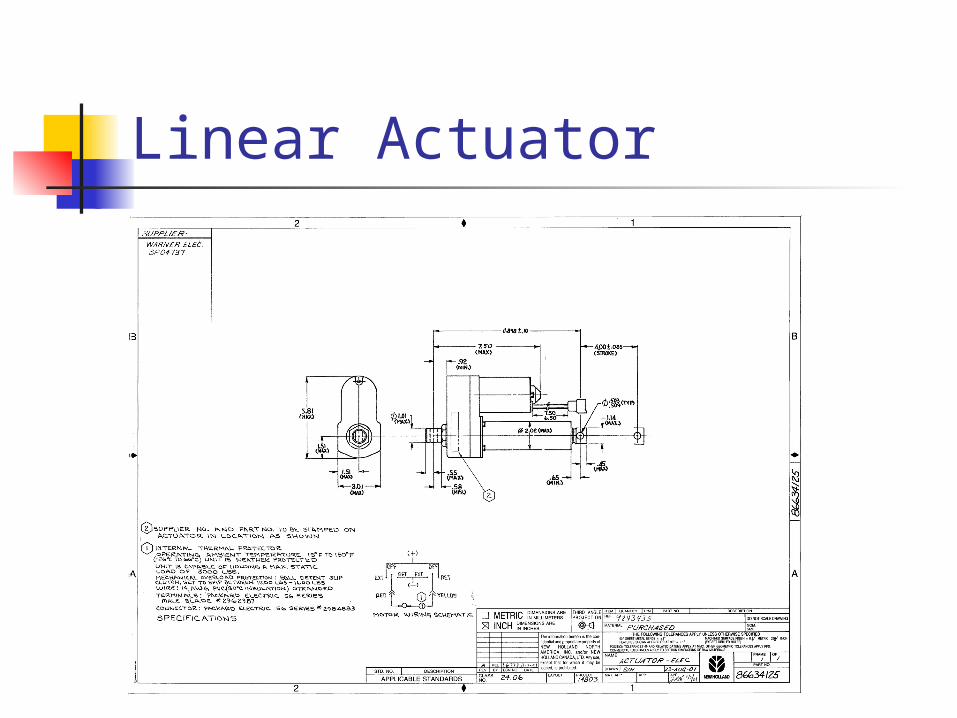
Concept 2- Linear Actuator

Actuation Design Decision
Chose to Use A Linear Actuator Because:
• Least Expensive Solution• Smallest Amount of Machine Redesign• More Durability• Lowest Energy Requirements

Safety Return

Safety Return
Concept 1- Engine ShutoffBenefits:Least Expensive and Easiest to Implement
Major Problems:Complete Loss of Operation After FailureCustomer Perception of “Unsafe”

Safety Return
Concept 2- Collapsible Linkage
Normal Operating Conditions Failure Mode
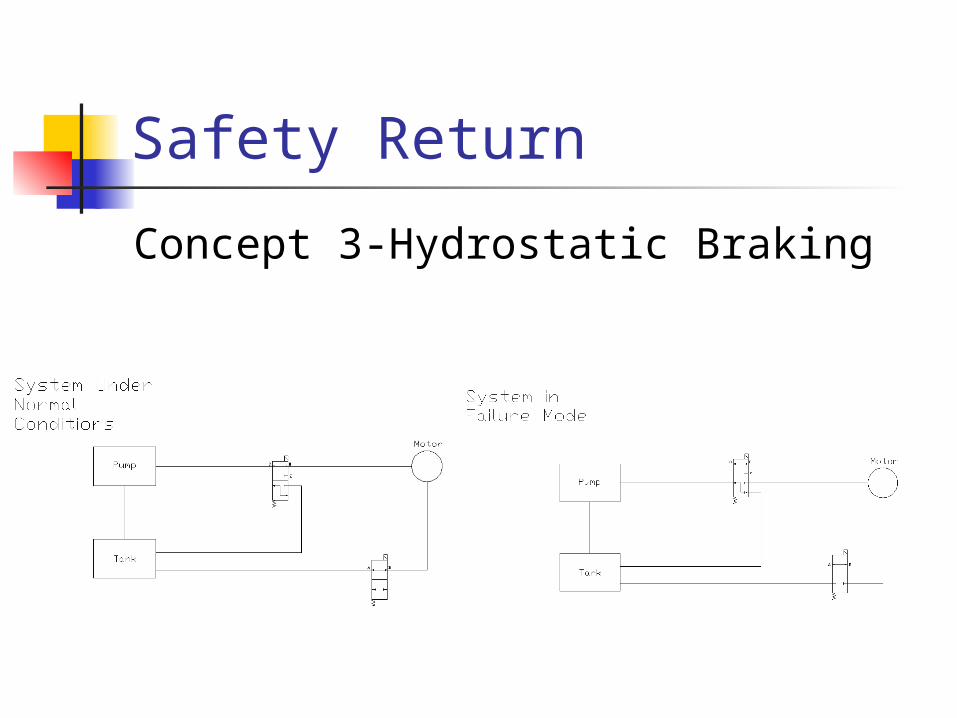
Safety Return
Concept 3-Hydrostatic Braking

Safety Return
Concept 4- Hydro-Mechanical Failsafe
Safety Return Design Decision
Chose the Hydro-Mechanical Failsafe Because: Safe Low Cost Quick Time to Reach Neutral Position Ability to Use Other Functions After
Propulsion Shutoff
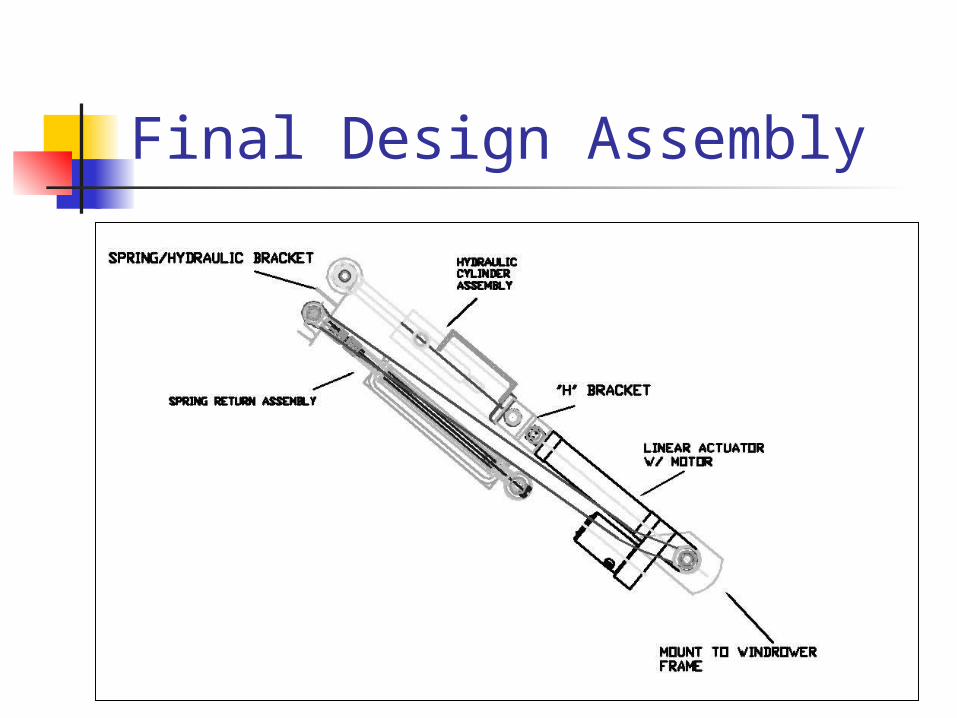
Final Design Assembly
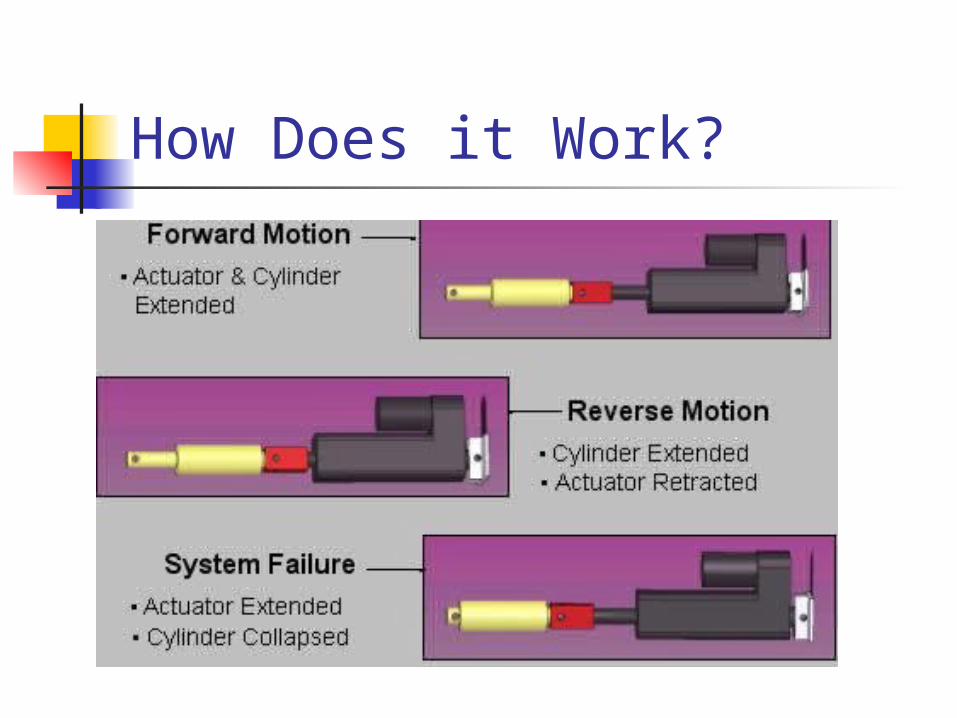
How Does it Work?

Reverse vs. Forward Engine Shutoff
Machine will not be cutting crop in reverse
Center of gravity is close to front of machine
Reverse speed much less than maximum forward speed
Machine will not be moving in reverse on roadways

Future Controller Design
Validation- Machine Tests
How Will Machine React if Engine is Shutoff While Operating in Reverse?

Validation- Machine Tests
Engine RPM
Cylinder Position
Ground Speed
Validation- FMEA
Failure Modes and Effects Analysis• Identifies Potential Failure Modes
• Estimates Occurrence Rate
• Assess Severity of Failure
• Evaluates Potential To Detect Failure
• Recommends a Design Action to Lower Risk if Needed

Sample FMEA

Validation- Cost Breakdown

Validation-Stress Analysis
Path Forward
Finalize Actuator Supplier Build Prototype Write Controller Code Test Mean Time Between Failure in
Lab Perform Field Tests

QUESTIONS ?
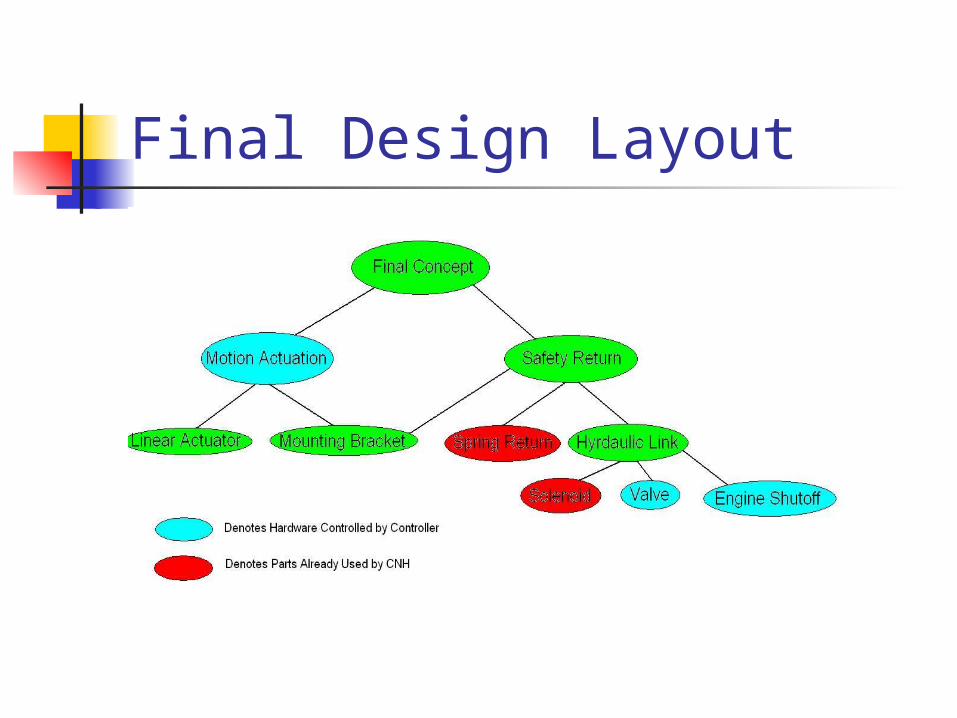
Final Design Layout

Spring Return Mechanism
Existing CNH Return Spring
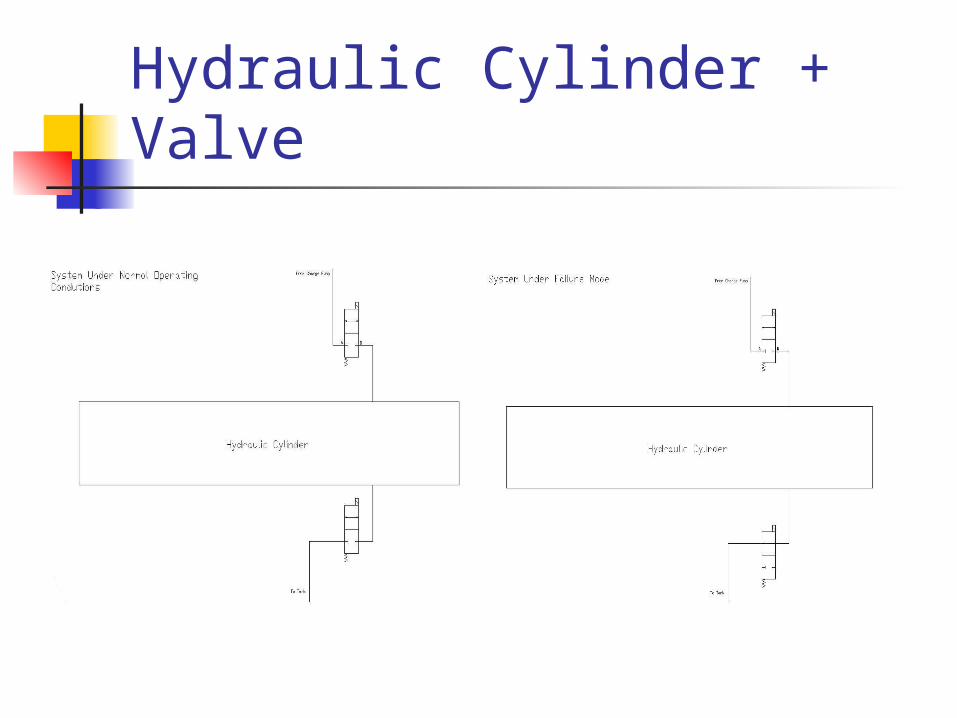
Hydraulic Cylinder + Valve
Linear Actuator

Hydraulic / Spring Connection
To Pintel Arm
To Spring Assembly
Hydraulic Connection

Actuator Mounting Bracket
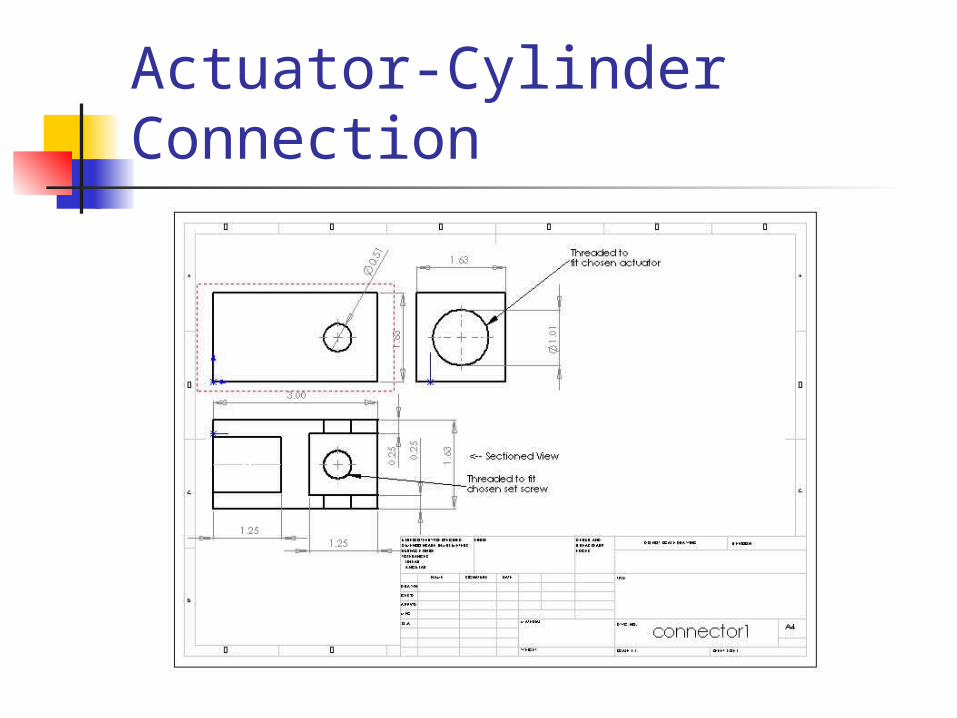
Actuator-Cylinder Connection

Controller Diagram
DC MotorCi PWM Screw
Linear actuator
Cd
rd ed ri ei ydyi
rd: Reference Displacement
ed: Error Displacement
Cd: Displacement Controller
Ri: Reference Current
Ei:Current Error
Ci/PMW: Current Controller
Yi: Output Current
Yd:Output Displacement

Validation- Stress Analysis