technical aspects of levitation - philips bound... · technical aspects of .levitation 47 it willhe...
TRANSCRIPT

R 284 Philips Res. Rep. 11, 45-56, 1956
TECHNICAL ASPECTS OF LEVITATION
by A. H. BOERDIJK 531.221.3:531.5:621.8.031.2
SummaryLevitation of a body is here defined as a state of either stable or in-different equilibrium relative to the earth in which material contactbetween the body and its environment is not essential. The possibili-ties and limitations of levitation by auxiliary gravitational forces,by reaction forces and by forces in electromagnetic fields are investi-gated. Levitation by gravitational forces or by radiation pressure is •not feasible in practice, whilst levitation by forces in electrostaticfields is theoretically impossible. Under certain conditions levitation.may be achieved by reaction forces and by forces in magnetostatic,stationary" and quasi-stationary electromagnetic fields. Publishedapplications comprise balances, centrifuges, and a method for meltingmetals in vacuo without a crucible.(
\
RésuméPar la présente on dëfinit que lëvitation d'un corps est l'état d'ëquili-bre stable ou indifférent par rapport à la terre dans lequel des contactsmatériels entre ce corps et son entourage ne sont pas essentiels, Lespossibilités d'obtenir Iëvitation par des forces de gravitation auxili-aires, par des forces de réaction et par des forces dans des champsêlectromagnëtiques sont examinées. La lëvitation par des forcesde gravitation auxiliaires ou par la pressure de radiation est impossibleà cause des limitations techniques. Dans un champ ëlectrostatique laIëvitation est impossible par des raisons théoretiques. Sous cértainesrestrictions on peilt obtenir la Iêvitation par des forces de rëaction .et par des forces dans des champs magnétostatiques, des champsstationnaires et quasi-stationnaires ëlectromagnëtiques. Les appli-cations publiëes comprennent des balances, des centrifuges et uneméthode pour fondre des métaux dans Ie vide sans creuset.
ZusaminenfassungMan definiert hier freies Schweben eines Körpers als denjenigenZustand stabielen oder indifferenten Gleichgewichtes gegenüber derErde, wobei materielle Kontakten zwischen dem Körper und seinerUmgebung nicht essentiellsind. Die Möglichkeiten zur Verwirklichungeines freien Schwebens mittels zusätzlicher Gravitationskräfte, mittelsReaktionskräfte und mittels Kräfte in einem elektromagnetischenFeld werden untersucht. Es wird gezeigt, daB freies Schweben durchzusätzliche Gravitationskräfte oder durch Strahlungsdruck technischunmöglich ist. Freies' Schweben durch Kräfte.in einem elektrostati-schen Feld ist theoretisch unmöglich. Unter gewissen Bedingungenkann man freies Schweben erhalten durch Reaktionskräfte und durchKräfte in einem magnetostatischen Feld oder einem stationnärenoder quasi-stationnären elektromagnetischen Feld. V.eröffentlichteAnwendungen umfassen Waagen, Zentrifugen und eine Methode ZUID
Schmelzen von Metallen in Vakuum ohne TiegeL
1. Introduction
There are numerous cases in which gravitational force is undesirable.The rotation and horizontal translation of bodies, for instance, are hin-

46 A. ;H. BOERDIJK
. dered by friction often largely caused by gravity. Many attempts havebeen made to compensate gravitational forces in such cases.
We shall deal here with that special type of compensation which bysome authors 9,14,28) is called "levitation". A body is said to be levitatedif it is in a state' of stable or of indifferent equilibrium relative to the earth, 'in which material contact between the body and its environment is .notessential.
It should be mentioned here that levitation has been for centuries (and still seems to he)an object of magic art and ·spiritism. Auto-levitation is said to accompany mystical ec-stacy" sometimes. Parapsychology deals with it as, a special kind of telekinesis or psycho-kinesis 29).
As the compensating forces have to be independent of contact we haveto exclude all kinds of forces which essentially have a short action radius(of the order of the separation distances of atoms in solids or shorter).So far as we see, a priori, three possibilities for the nature of the eompensat-ing forces are left.(A) Gravitational forces. An auxiliary body is placed vertically above thebody to be levitated in such a way that the, gravitational forces on thelatter body balance.(B) Reaction forces. A jet of material is ejected from the levitated bodyin a vertically downward direction. The reaction on the body compensatesthe, gravitational force, on it. '(C) Forces exerted by electromagnetic fields. We shall deal with three casesseparately: a radiation field, a static or stationary field, and a quasi-sta-tionary field. .
2. Levitation hy gravitational forces
To estimate the mass of the auxiliary body we suppose that this is a.homogeneous sphere of diameter D, density e and mass M. Denoting byDe, ee and Me the corresponding quantities' of the earth, we easily findthat for compensation of the terrestrial attractional force at the surfaceof the earth we must have· '
'e~M=-Me,e2
eeD..:...-De•eFor the densest material available on our planet [platina-iridium] e R::i 22700kg/m3, whereas ee R::i 5520 kg/m3. This leads to
M R::i 0·06 Me, D R::i 0·24De.
It turns out to he possible to obtain the same effect by means of an auxiliary bodywith a somewhat' smaller mass, because the optimal shape differs from il sphere. The im-provement, however, is small.

TECHNICAL ASPECTS OF .LEVITATION 47
It will he clear that the enormous mass of the auxiliary body is an abso- .,lute hindrance for experiments of this kind on our planet. It will not benecessary to discuss here possible solutions of the stability problem.
3. Levitation hy reaction forces
Much has been published concerning these forces, which are often usedin rockets (jet-propulsion). For stationary "rockets" certainsimple relations'can be derived from which the possibilities and limitations of this type oflevitation are readily apparent.If the levitated body has a mass m(t), and per unit of time a small frac>
tion e of its mass is ejected ~th an initial velocity v vertically downward,it follows from the impulse law (the relativistic correction taken intoaccount) that for compensation of the gravitational force gm(t) we shouldhave
evg = -====-Vl- v2jc2
(where c is the· velocity of light), from which follows
(1)
(2)
The minimal power P needed per unit of mass of the body will he, 1 2
P = ec2 (. - 1) = ~ (1 - -VI......:v2jc2),-Vl- v2jc2 v , .(3)
, .a function of v only. This power may be supplied either from outside(we suppose without any additional force; see also section 4) or from thelevitated 'body itself. We distinguish these cases by subscripts I and 2respectively.
Denoting by T the interval of time in which the mass of the body will. bave diminished to half of its initial value, we have for the first casedm(t) = -em(t)dt, which leads to
(4)
In the second case the mass of the body will decrease per unit of time'not only bythe amount em(t) of the ejectedmass, but also bythe equivalentmass of its energy, being Pm(t)jc2• This leads to .
v In 2T2=--·g
(5)
48 A. H. BOERDIJK
Eliminating v from eqs (3), (4) and (5) we find
PI = gc (l"l+k2:_ k),
P2= g~ (k- ¥k2-1).
(6)
(7)
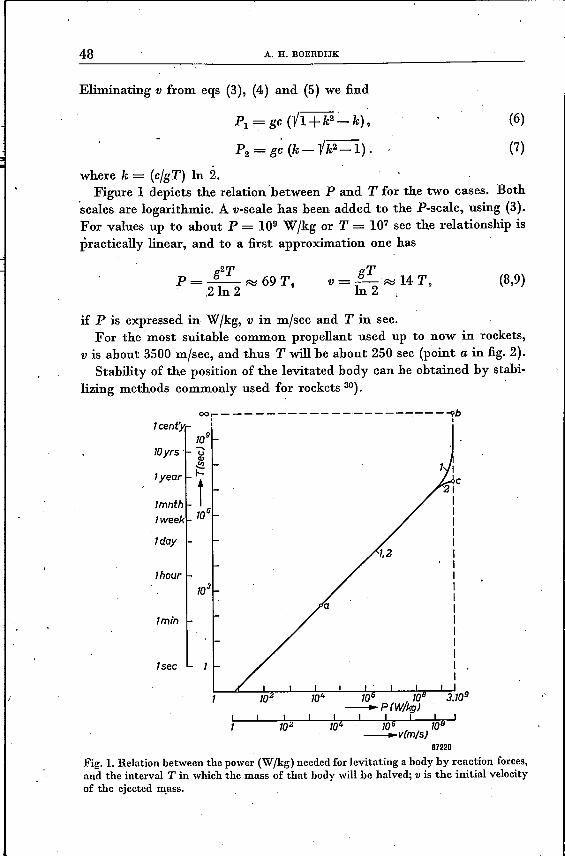
where k = (c/gT) In 2.Figure 1 depicts the relation 'between Pand T for the two cases. Both
'scales are logarithmic. A v-scale has been added to the P-scale, using (3).For values up to about P = 109 W/kg or T = 107 sec the relationship ispractically linear, and to a first approximation one has
g2TP=--~69T,
,21n 2gT
v= -- ~ 14 T,In2
(8,9)
if P is expressed in W/kg, v in m/sec and T in sec.For the most suitable common propellant used up to now in rockets,
v is about 3500 m/sec, and thus T will be about 250 sec (point a in fig. 2).Stability of the position of the levitated body can be obtained by stabi-
lizing methods commonly used for rockets 30).
lcent)'loo~---------------------~b
: I
109
tûyrs : .....0<IJ~
Iyear l-
j c21
Imnth II week 106 1
1
Iday11I1
Ihour 1103 I
1I
Imin II1I
Isec I1
la la-PM/kg)
I I I I I I I102 104 106 108
_v(m/s)8722D
Fig. 1.Relation between the power (Wjkg) needed for levitating a body by reaction forces,and the interval T in which the mass of that body will be halved; v is the initial velocityof the ejected m,ass.

TECHNICAL ASPECTS OF LEVITATION
IfP approaches ge ~ 3.109 WJkg, T approaches infinity (point b in fig. 2)in the first case and the value eIn2Jg ~ 2.12.107 'sec ~ 245 days in the se-cond (point e). The latter is the upper limit of values of T obtainable fora completely independent body with this type of'levitation. In section 4we shall revert to these cases.
4. Levitation by forces in a radiation field
First we shall suppose the wavelength of the radiation to be small ascompared to the horizontal dimensions of the body. The action on thebody can be described in terms of radiation pressure. We have to distin-guish two cases. In the first case the body emits radiation, in the secondit is situated in the radiation field of an external source. To make the radia-tion pre.ssure as effective as possible, the direction of the' radiation has tobe vertically downward in the first case and vertically upward in the se-cond one. -
Let us suppose that in the first case the emitted radiation bundle hasan. effective horizontal cross-section of area s, the power per unit area inthat cross-section being P: The radiation pressure must compensate thegravitational force mg on the body. So we have
mg = pe]c , (10)
For the radiation power per unit of mass of the body we find from (10)
. psP1=-=ge.m
(11)
This is exactly the same value as in the cases discussed in section 3,represented by points band c in fig. 2. This is not surprising. These pointsdo in fact represent levitation by radiation pressure. For P =ge eqs (2)and (3) lead to e = 0 and v = e. This means that no mass as such is eject-ed, but, energy with velocity a only, i.e., photons, radiation.The interval of time in which the weight of the body will be halved
can he found £rom (5) by substitution of v = e; it is equal to e In2Jg~ .2.12.107 sec ~ 245 days, as at point e of fig. 2.
In the second case the radiation will generally he partly absorbed andpartly reflected by the body. To obtain the largest possible compensatingforce there must be complete reflection. For the radiation power per unitof mass of the body we obtain
P2 = geJ2. (12)
If starting from the preceding case the wavelength is increased, thedirection of the radiation emitted or reflected by the body can no longerbe substantially vertical, owing to the decreased directivity of the emitter
49

50 A. H. BOERDIJK
or to scattering respectively. This effect tends to decrease the mean verticalcomponent of the impulse of the photons emitted or reflected by the body.By applying the impulse law we find that (11) and (12), respectively,are lower limits for the power per unit of mass.
By introducing repeated reflections each of the photons of the radiationbundle may he used a number of times for transfer of impulse to the body.in this way the net power per unit of mass could be made much smallerthan indicated by eqs (11) and (12). However, losses 'by absorption andscattering are unavoidable. Since the power indicated by (11) and (12)is of the order of 109 Wjkg, the net power will still he enormous even if therelative losses are extremely small, for instance, 10-3• Realization seemsnext to impossible. It will not be necessary to discuss here possible solu-tions of the stability problem.
5. Levitation by forces in static and stationary electromagnetic fields
5.1. Earnshaw's theorem
A priori levitation by means of magnetostatic or electrostatic fieldsseems very advantageous, since no power would be necessary. Severalsuggestions have been made for obtaining levitation by means of mutuallyrepelling permanent magnets 13, 16). But in cases in which success has beenreported at least one of the degrees of freedom of movement 'of the bodyhas been eliminated by some mechanical constraint essentially dependingon contact of the body with its environment 12, 21, 22, 23).
The basic theorem stating the instability of a static system consistingof particles which either repel or attract one another with forces varyinginversely with the squ,are of their distance, has been formulated and provedby Earnshaw 1). Ithas been applied by Maxwell ê) to the electrostatic fieldand by Tonks 14) to the magnetostatic field. The most complete theoryhas been given by Braunbek 10). He proves that levitation 'in electrostatic,magnetostatic and stationary electromagnetic fields is impossible becauseof instability if the relative dielectric constant er and the relative permea-
- bility /-lr are ~ 1 everywhere in the system. Since er~l for all materialsunder all circumstances, it follows that levitation is impossible in an elec-trostatic field, whereas it is at least not impossible if the field is magneticand materials 'with /-lr < 1 are present.There are two classes of such materials: diamagnetic materials for which
/-lr is slightly less than unity, and materials in the superconductive statewhich for our, purpose behave as if /-lr'= o. As the superconductive stateonly exists if the magnetic field does not exceed a critical value which is afunction of the temperature, the use of the latter class is restricted. Moreoverthe necessity of maintaining a sufficiently low temperature is troublesome.

TECHNICAL ASPECTS OF LEVITATION 5l
In general the body as well as its environment may contain sources ofthe magnetic field and diamagnetic or superconductive material. Weshall consider three cases.
5.2. Levitation of diamagnetics or superconductors in static' or stationarymagnetic fields
We consider a magnetic field in vacuo acting on a small volume eleme~tdV of a diamagnetic substance. Denoting by z the coordinate measuredin the vertical direction, increasing upward,' the force df exerted in thisdirection by the field will he, to a first approximation 4)',
. èJH2df=-t,uo (1-,uT) - dV,
èJz(13)
in which ,uo is the absolute permeability of empty space. For levitation,at least the gravitational force gdm = eg dV (where e is the density of thematerial) has' to be cornpensatedç, that means
èJH2 2g e--~-----.èJz . ,uo 1- ,uT
For practically all known diamagnetic materials e/(I-,uT} is very large.Relatively small values, of the order of 2.106 kg/m3, occur in a numberof organic substances such as Hg(CH3h, Hg(C2H5)2. Application of thesesubstances is not attractive because they are liquid at room temperaturesand moreover very poisonous. Next in the range we have graphite and
I bismuth for which e/(I-,uT} equals 2.3.107 and 6.1.107 kg/m3,respectively.These values are approximate because ,uT depends on the direction of themagnetic field relative to the crystal axes. For graphite we find
(14)
(IS)
Even if the strongest magnetic fields obtainable are applied inhomogenei-ties of this order can only be realized over short distances, of the order ofcentimetres at most. Levitation of significant loads attached to the gra-phite particle is out of question.
Braunbek 11} obtained levitation of small pieces of bismuth (8 mg) andgraphite (75 mg) in the magnetic field (Hmax ~ 23000 Oe) between special-ly shaped pole faces of an electromagnet (dissipating 530 W).
From simple dimensional considerations, it follows that if a certainmagnetic circuit is realized on a smaller scale the maximal value of Hnecessary to obtain the same inhomogeneity èJH2/0Z decreases with the squareroot of a linear dimension. We could therefore easily repeat Braunhek's

52 A. H. BOERDIJK
experiment on a somewhat smaller scale using permanent magnets only(fig. 2).If instead of the diamagnetic substance a material in the superconductive state is
applied, the maximal value of the field strength at the surface of the superconductor maynot exceed a critical value Hmax. We may conjecture that the vertical component of thepressure exerted by a magnetic field on the lower surface of the superconductor has amaximal value of !f-loHmax2• Under the most favourable circumstances this pressure iszero at the upper side. Therefore under the assumptions mentioned, the maximal valueof the total lifting force per unit area of the horizontal cross-section of the superconduc-tor will be tf-loHmax2 also. For pure metals Hmax is of the order of 103 Oe or 105 A/m.Higher values bave been found for some alloys, for instance 2.3.104 Oe ~ 1,8.106 A/mfor a Pb-Bi alloy. For this substance the maximal value mentioned above becomes
tf-loHmax2"""2.106 N/m2 """200 N/cm2. (16)Even if only a small fraction of this amount could be realized the lifting force would besufficient to levitate the superconductor itself as well as a load of interesting dimensions.
ILr
8702·1
Fig. 2. Permanent magnet with adjustable air gap and specially shaped pole faces, levi-tating a small piece of graphite just above the gap.
5.3. Levitation of permanent magnets by diamagnetic or superconductivesubstances
Let us consider two permanent magnets in vacuo, satisfying the follow-ing conditions: (a) the magnets have no point(s) of contact, (b) they aresituated in such a way relative to a horizontal plane and have such shapesand magnetizations that each magnet is the mirror-image of the otherrelative to the plane, (c) the mechanical moment exerted byeach magnet

TECHNICAL ASPECTS OF LEVITATION
on the other is zero, (d) the distance between 'the magnets is such that therepulsive for~e is equal to the weight of one magnet. It is easy to prove byexperiment that such pairs of magnets exist, Actually we could take twoparallel needles, with a length of several centimetre~, of "Ticonal" magne-tized parallel to the axes, or two thin circular plates of ferroxdure, with adiameter of a few centimetres, magnetized parallel to the axes.If the lower magnet is kept in a fixed position the upper one has no stable
equilibrium position. Only for horizontal displacements IS the'equilihriumlabile.
Now we suppose that the lower magnet is taken away and at the sametime the half-space below the horizontal plane is filled with a superconduc-'tive substance. The magnetic field in the upper half-space can he obtainedby superposition of the field of the remaining magnet and that of its mirror-image relative to the boundary plane 26). This field will therefore be iden-tical with that of the preceding case. The same is true for the moments andforces acting on the magnet. For horizontal displacements, however, theequilibrium here is indifferent Instead of labile, since the mirror-imagealways remains exactly vertically under the magnet. In this system levi-tation is therefore possible.
We do not need to fill the whole lower half-space with a superconductivesubsta~ce since the currents simulating the imag~ are restricted to a verythin sheet bounding the horizontal plane. Further, we may conjecture thatit is possible to realize the same repulsive force. for a somewhat decreasedheight of the magnet, by means of a sheet of finite area 'situàted verticallyunder the magnet. It canIndeed be easily shown that the contrihution ofa small element of the sheet to the repulsive force varies inversely with atleast the seventh power of the distance from the magnet. The effects ofthe edges of the sheet will cause the equilibrium to be labile instead ofindifferent. We may further conjecture that this lability can be changedinto stability by making the sheet slightly concave at the upper side, be-cause the fields, currents and forces effecting levitation will change verylittle as long as the radius of curvature of the concavity is very large ascompared with the dimensions of the magnet, the sheet and their distance,whereas obviously the lability decreases.
This has been verified by Arkadiev 19) who succeeded in levitating aferro-nickel-aluminium magnet, 4 X 4 X 10 mm in dimensions, having amass of about 1 g, above a concave superconductive lead disk 40 mm indiameter in a Dewar vessel over liquid helium.We will proceed the above line of thought a little further, starting from the system in
which a magnet is levitated by a half-space filled with a superconductor. Suppose wereplace the superconductive substance by a diamagnetic one of relative permeability pr.This will cause the mirror-image to decrease in strength by a factor 26)
n = (1+ Pr)/(l-Pr). (17)
53
54 A. H. BOERDIJK
The repulsive force will decrease by a somewhat smaller factor n' because of the decreaseddemagnetization of the magnet by the now-much-weaker image. From simple dimensionalconsiderations it follows that, if our model is reduced by the factor n' in alllinear dimen-sions, the repulsive force will again exactly compensate the weight of the magnet. For the 'same reasons as given above we may conjecture that we need not fill the whole half-spacewith the diamagnetic substance, and that stability can he obtained by providing the uppersurface of the diamagnetic substance to be slightly concave.As the factor n of eq. (17) is practically inversely proportional to I-Pr it is advantageous
to use a diamagnetic substance with I-Pr as large as possible, such as Bi, for whichl-PrRi 1'6.10,--4 and n Ri 1,2.104• It may be expected, therefore, that a magnetized par-ticle of suitable shape, and dimensions of at least a few microns, may he levitated abovethe concave upper surface of a piece of Bi with dimensions of a few millimetres.
5.4. Levitation of permanent magnets by permanent magnets and diamagneticsIor superconductors
From Earnshaw's· theorem it f~llows that a permanent magnet cannotbe levitated by means of one or more other permanent magnets alone he-cause of instability of the equilibrium position of the magnet.' Of coursethere is a possibility that this instability may he overcome by suitableapplication of superconductors or diamagnetics. In an experiment with oneof the most simple systems of this kind we did in fact succeed in obtaininglevitation.
A large permanent bar magnet M1 with vertical axis attracts a smallpermanent magnet M2 situated vertically below it. For small horizontaldisplacements of M2 the. equilibrium is stable, whereas for small, vertical
, displacements it is labile. This lability can be overcome by placing directlyunder M2 a diamagnetic body with a horizontal upper surface at such adistance from M1 that a small part of the weight of M2 is compensated bythe repulsive force exerted by the diamagnetic substance, the remainingpart of the weight being compensated by attraction by Mp If M2 is suf-ficiently small the repulsive force decreases so rapidly with increasing heightof M2 that the equilibrium for movements in vertical direction is stabilized.In our experiment M1 was a "Ticonal" bar magnet with a length of 30 cmand a diameter of 3 CID; M2 was a small circular ferroxdure plate with adiameter of 1 mm and 0·3 mm thick, magnetized parallel to the axis. Thediamagnetic body was a piece of graphite, cut from high-purity arc-lampcarbon.
6. Levitation in quasi-stationary electromagnetic fields
Earnshaw's theorem does not exclude the possibility of levitation in thiscase, even if ,ur> 1 and e-;» 1. Indeed levitation has been obtained. Wehave to distinguish two cases.
6.1. Levitation of electrical conductors in alternating fields
If an electrically conductive body is situated in an alternating magnetic

TECHNICAL ASPECTS OF LEVITATION 55
field, currents will be induced in the body which counteract the penetra- ,tion of the field in the conductor. We have a situation analogous to thecase ,ur<l of section 5.2.
Bedford, Peer and Tonks 9) obtained levitation of an aluminium diskwith a diameter of several decimetres in the field of a specially designedelectromagnet fed by alternating current with a frequency of 60 cis.Okress and co-werkers 28) realized levitation of masses of a few hundredsof grams by means of a coaxial coil system, fed by an alternating currentof about 700 A with a frequency of 104 cis. .6.2. Levitation in a quasi-stationary electromagnetic field with afeedback system
The general apparatus for levitation of this kind comprises the followingelements: (a) a source for generating the field, (b) the body to be levitated,(c) a sensing element for the vertical coordinate of the body, (d) a devicefor regulating the source in dependence of the output of the element (c)(feedback system) in such a way that the position of the body is stabilized.
In all published cases the source of the field is an electromagnet, mostlyfed by direct current, although alternating current has also been used 8).The levitated body contains a ferromagnetic material. The same kind oflevitation can be realized with a dielectric body in an electric field, but norecord of this alternative is available.
The sensing element is in most cases formed by a photocell and a beamof light partly intercepted by the body 5, 17,20,24,25). A sensing elementof a mechanical type has been suggested 3), and electrical types, eitherinductive 6, 15, 18) of capacitive 6, 8,017) have beén used.
The feedback system is always of normal electrical or electronic nature.Masses of the levitated hodies range from 10-2 mg 25) to 210 kg 8). The
lowest power per kg so far obtained 8) is 1·3 W.
7. Applications
Levitation by reaction forces has been practiced by special types ofaircraft vehicles as part of a landing scheme.
In such other published applications as we could :find, levitation wasobtained by forces in quasi-sationary electromagnetic fields.
The absence of mechanical friction for translational movements ledKernper 6, 7, 8) to the suggestion to apply levitation to such vehicles astrains. Arkadiev 19) suggested the revealing of superconductive inclusionsin a body directly by scattering over its surface small magnets. These will. roll to spots where superconductivity is absent. A .levitated body can beused as a balance, because its weight can be found from the current passingthrough the magnet coil20, 24, 25). Beams 25) obtained a precision of theorder of 10-5 mg.
56 A. H. BOERDIJK
The ahsence of mechanical friction in rotation is often used to ohtainhigh rotational speeds 6, 16, 17, 18, 25, 27). The rotor, generally a small steelhall, is spun in vacuo hy a rotating magnetic field. Beams 25) ohtained arotational.speed of 8.105 xev.]« and a centrifugal field in excess of 5.108 gwith a steel hall of 0·1 mm diameter. Holmes 5) ohtained residual frictionsof 10-2 dyne cm and residual torsional moments of 7.10-6 dyne cm/rad.
Okress and eo-workers 28) applied levitation in vacuo to the heating andmelting ·of metals without a crucible. Small amounts (of the order of 20 g)of Al and Ti could he levitated and molten. They suggest alloyingtechniques on this' hasis.
Eindhoven, December 1955
REFERENCES
1) S. Earnshaw, On the nature of the molecular forces, Trans. Cambridge phil. Soc.7, 97-112, 1842. ,
2) J. C. Maxwell, A Treatise on Electricity and Magnetism, Clarendon, Oxford, 1873,Vol. 1, pp. 139-141. .
3) B. Graemiger, Austrian patent 71 662, 1916.4) Handh. Experimentalphys., Akademische Verlagsges., Leipzig, 1932, vol. 11, part 1,
pp. 174-175.5) F. T. Holmes, Axial magnetic suspensions, Rev. sci. Instr. 8, 444-447,1937.G) H. Kemper, German patent 643 316, 1937. .7) H. Kemper, German patent 644.302, 1937.8) H. Kemper, Schwebende Aufhängung durch elektromagnetische Kräfte, Elektro-
tech. Z. 59, 391-395, 1938.9) B. D. Bedford, L. H. B. Peer and L. Tonks, The electromagnetic levitator, General
Electric Rev. 42, 246-247, 1939.10) W. Braunb ek , Freischwebende Körper im elektrischen und magnetischen Feld,
Z. Phys. 112, 753-763, 1939.11) W. Braunbek, Freies Schweben diamagnetischer Körper im Magnetfeld, Z. Phys.
112, 764-769, 1939. ,12) A. Hansèn, U.S. patent 225'4698, 1940.12) M. S. SneB, British patent 539 409, 1940.14) L. Tonks, Note on Earnshaw's theorem, Elect. Engng 59, 118-119, 1940.15) L. E. MacHattie, The production of high rotational speed, Rev. sci. Instr. 12,
429-435, 1941.16) E. C. Neal, U.S. patent 2323837, 1941.17) C. S. Smith, High rotational speeds in vacuum, Rev. sci. Instr. 12, 15-20, 1941.18) J. W. Beams, J. L. Young and J. W. Moore, The production of high centrifugal
fields, J. appl, Phys. 17, 886-890, 1946. .10) V. Arkadiev, A floating magnet, Nature 160, 330,1947. .'20) J. W. Clark, An electronic analytical balance, Rev. sci. Instr. 18, 915-918, 1947.21) I. F. Kinnard, A new watt-hour meter, Elect. Engng 67, 627-629, 932, 1948.22) M. Baermann, Netherlands patent 76674, 1949.23) F. H. Bush and G. R. Sturtevant, U.S. patent 2560260, 1949.24) J. W. Beams, Magnetic suspension balance, Phys. Rev. 78,471-472,1950.25) J. W. Beams, Magnetic suspensionfor small rotors, Rev. sci. Instr. 21,182-184, 1950.26) E. Weber, Electromagnetic Fields, Wiley, New York, 1950, Vol. 1, pp. 236-237.27) G. Shinoda and M. Itoh, On an ultra-high-rotational instrument, Tech. Rep. Osaka
Univ. 1, 151-156, 1951.2B) E. C. Okress, D. M. Wroughton, G. Comenetz, P. H. Brace and J. C. R. Kelly,
Electromagnetic levitation of solidand molten metals, J. appl. Phys. 23, 545-5,52, 1952.29) W. H. C. Tenhaeff, Inleiding tot de parapsychologie, Bijleveld, Utrecht, 1952,
pp. 125-126.30) J. M. J. Kooy, Principle electronic scheme for automatic pilot of long range rocket,
De Ingenieur 65, 0, 9-13, 1953.