technical university of munich (tum) chair of media...
TRANSCRIPT

Eckehard Steinbach
Technical University of Munich (TUM)
Chair of Media Technology
European Wireless, EW’17
Dresden, May 17, 2017
Haptic Communication for the Tactile Internet

Telepresence
2Eckehard Steinbach Haptic Communication for the Tactile Internet
audiovisual
communication
Network
Although conversational services are bidirectional, audiovisual data communication is 2x unidirectional

Telepresence + Haptics = Teleoperation
3
Network
audio-visual-haptic
communication
Teleoperator in
remote environment
Haptic communication is by definition bidirectional
Operator with
Human-System-Interface
Local Control Loop Local Control Loop
Sensors
&
Actuators
R. Ferrell and T. B. Sheridan, “Supervisory control of remote
manipulation,” IEEE Spectrum, vol. 4, no. 10, pp. 81–88, October 1967.
Operator performance increases significantly in telemanipulation of remote objects when haptic feedback is provided
[Cohen Loeb 1983; Hannaford et al. 1993; Hirzinger et al. 1994; Srinisavan et al. 1997; Dennerlein et al. 2000; Basdogan et al. 2000; Cockburn et al. 2005; Tholey et al. 2005;
Hokayem et al. 2006; El Saddik 2007]
Eckehard Steinbach Haptic Communication for the Tactile Internet

Haptic Communication for the Tactile Internet
4Eckehard Steinbach Haptic Communication for the Tactile Internet
In this talk: Human-in-the-loop TI
Focus is on Quality of Interaction
Remote environment can be real or virtual

Haptics
5
Tactile PerceptionKinesthetic Perception
Perception ofform, position, surface texture, stiffness, friction, temperature, etc.
Image Source: Katsunari Sato,
Dept. of MEIP, The University of Tokyo/Japan
position & forces sense of touch of the skin
Eckehard Steinbach Haptic Communication for the Tactile Internet

Teleoperation with kinesthetic feedback
6
Network
Position / Velocity
Force / Torque Feedback
Operator
Teleoperator
1000 – 4000 Hz sampling/packet rate
Very strict delay constraints (< 10ms)
Closed loop communication
Lack of realism (hard contacts / surface details)
Eckehard Steinbach Haptic Communication for the Tactile Internet

Demo: Strict delay constraint
7Eckehard Steinbach Haptic Communication for the Tactile Internet
Operator TeleoperatorForce Feedback

Teleoperation with tactile feedback
8
Relaxed delay constraints
Improved realism
Open loop communication
Eckehard Steinbach Haptic Communication for the Tactile Internet

Communication of kinesthetic/tactile data
9
Communication of kinesthetic information
Communication of tactile information
Eckehard Steinbach Haptic Communication for the Tactile Internet

Communication of kinesthetic data: Packet rate reduction
10
Perceptual haptic data reduction [1]
• exploits limits of human haptic perception
• packet rate reduction of up to 90% (no perceivable distortion)
• leads to a variable packet rate event-based sampling and communication
local control local control
[1] P. Hinterseer, S. Hirche, S. Chaudhuri, E. Steinbach, and M. Buss, “Perception-Based Data Reduction and Transmission of Haptic Data in Telepresence
and Teleaction Systems,” IEEE Trans. Signal Process., vol. 56, no. 2, pp. 588–597, Feb. 2008.
t
Transmitted
signal update
position/velocity
kinesthetic signals (forces, torques) + audio + video
Eckehard Steinbach Haptic Communication for the Tactile Internet

Communication of kinesthetic data: Time-delayedteleoperation
11
delay damping(control)
transparency
Eckehard Steinbach Haptic Communication for the Tactile Internet

Time-delayed Teleoperation: Passivity-based
12
J. Ryu, J. Artigas and C. Preusche, 1994
B. Hannaford, and J. Ryu, 2002
pos./vel.
force
operator/master
teleoperator/slave
forcenetwork(delay)
video/audio
passivityobserver
video/audio
pos./vel.fT
bT
passivityobserver
mEsE
Stable haptic interaction for delays 10ms … 100ms
Energy dissipation leads to reduced transparency
Eckehard Steinbach Haptic Communication for the Tactile Internet
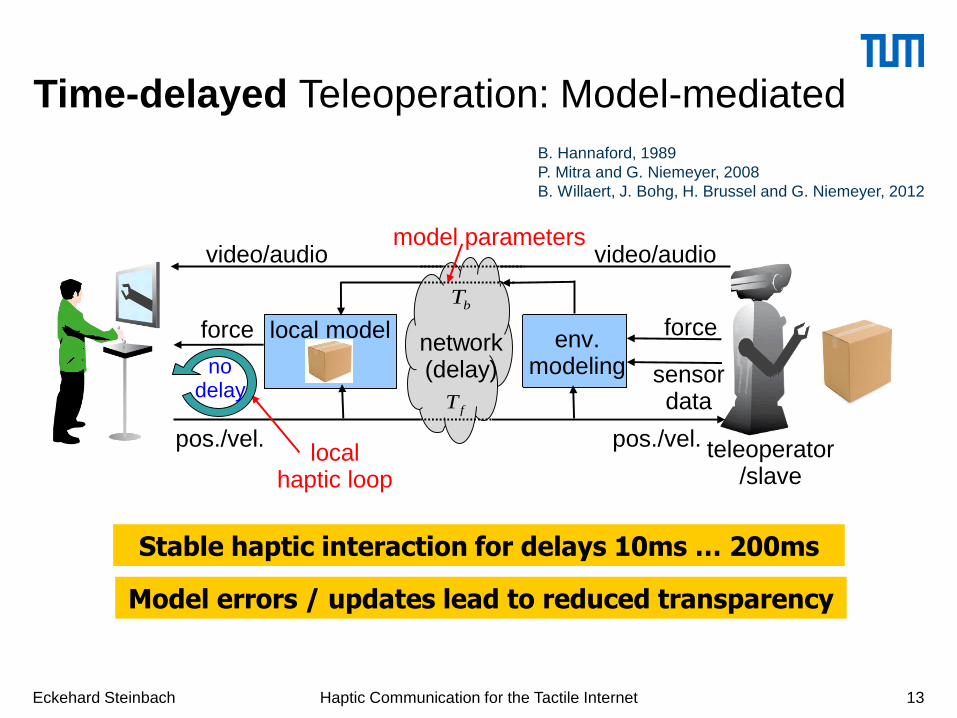
Time-delayed Teleoperation: Model-mediated
13
network(delay)
pos./vel.
force local model env.modeling
model parameters
sensor data
force
localhaptic loop
pos./vel.
nodelay
video/audio video/audio
teleoperator/slave
fT
bT
B. Hannaford, 1989
P. Mitra and G. Niemeyer, 2008
B. Willaert, J. Bohg, H. Brussel and G. Niemeyer, 2012
Stable haptic interaction for delays 10ms … 200ms
Model errors / updates lead to reduced transparency
Eckehard Steinbach Haptic Communication for the Tactile Internet

14
Demo: TDPA + Perceptual coding für different RTT
Eckehard Steinbach Haptic Communication for the Tactile Internet

Control & communication for different delayranges
15Eckehard Steinbach Haptic Communication for the Tactile Internet

Joint optimization of communication and control
16
Applicationjoint optimization
Experience (QoE)Task Performance
(QoTP)
Control (QoC) Network (QoS)
Joint optimization including the knowledge about the human user
models and metrics
models and metrics
models and metrics
models and metrics
Eckehard Steinbach Haptic Communication for the Tactile Internet
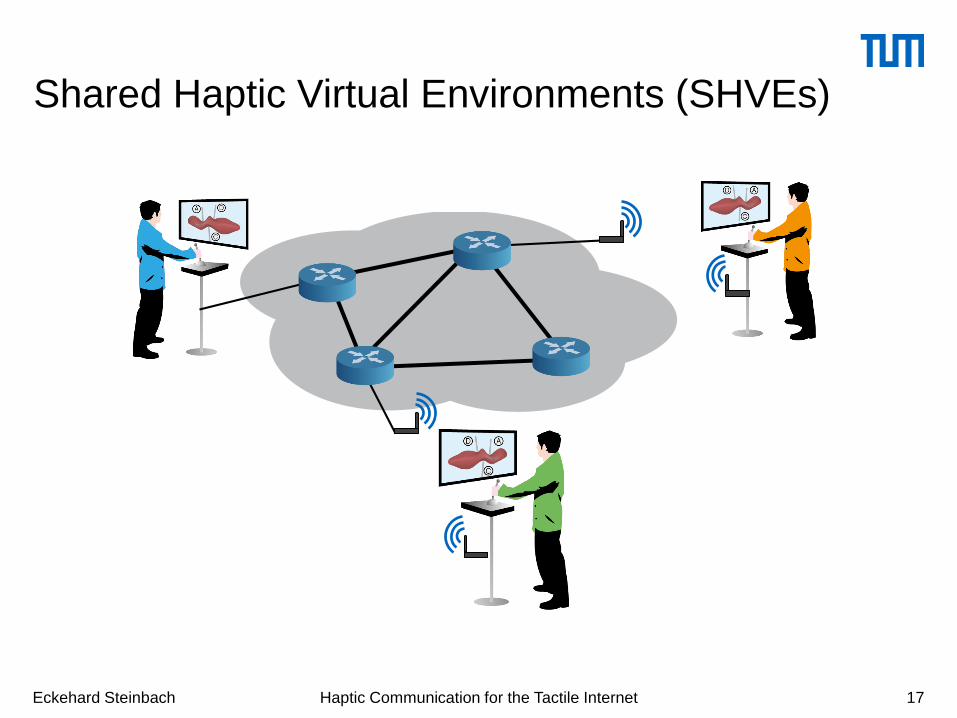
Shared Haptic Virtual Environments (SHVEs)
17Eckehard Steinbach Haptic Communication for the Tactile Internet

Example: Physical coupling of two users in a VE
18Eckehard Steinbach Haptic Communication for the Tactile Internet
Joint work with W. Kellerer and his team (LKN@TUM)

Communication of kinesthetic/tactile data
19
Communication of kinesthetic information
Communication of tactile information
Eckehard Steinbach Haptic Communication for the Tactile Internet

Vibrotactile communication
20Eckehard Steinbach Haptic Communication for the Tactile Internet

Communication of tactile information
21
Perceptual
model
R. Chaudhari et al., IEEE JSTSP 2015
Vibrotactile signals are similar to speech signals
Eckehard Steinbach Haptic Communication for the Tactile Internet

Sine detection thresholds and masking
22
R. Chaudhari et al., IEEE JSTSP 2015
custom-made stylus-like
handle mounted on Mini
SmartShakerTM
Eckehard Steinbach Haptic Communication for the Tactile Internet

Surface Material Perception
23Eckehard Steinbach Haptic Communication for the Tactile Internet
Source: Okamoto et al., 2013

Surface Analysis Devices
24Eckehard Steinbach Haptic Communication for the Tactile Internet

Surface Analysis Devices
25Eckehard Steinbach Haptic Communication for the Tactile Internet

Tactile feedback displays: Electrovibration-based
26Eckehard Steinbach Haptic Communication for the Tactile Internet
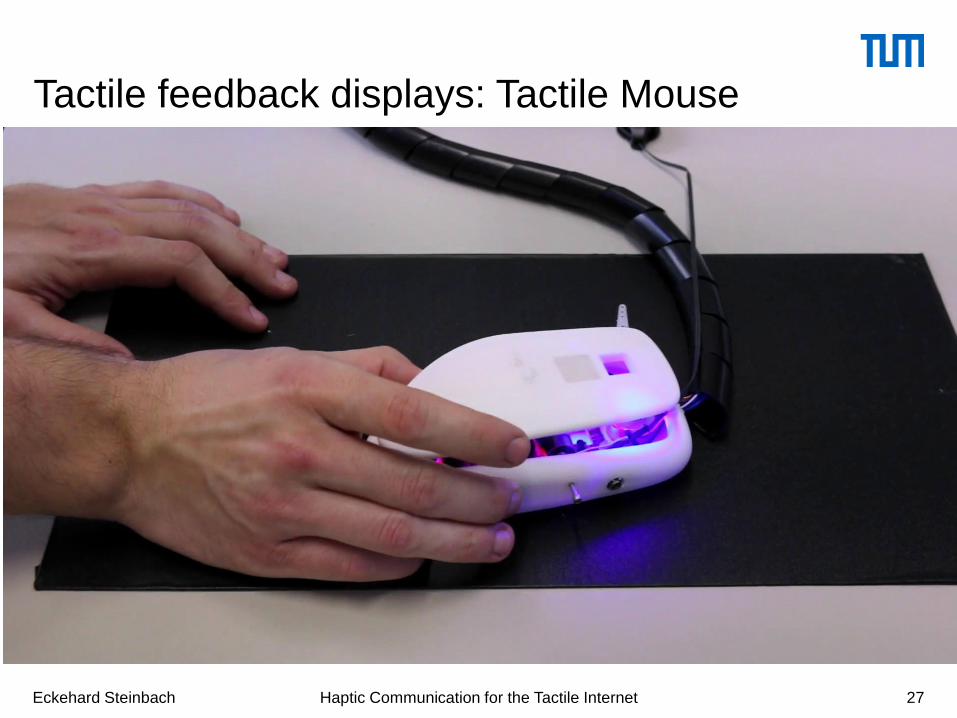
Tactile feedback displays: Tactile Mouse
27Eckehard Steinbach Haptic Communication for the Tactile Internet
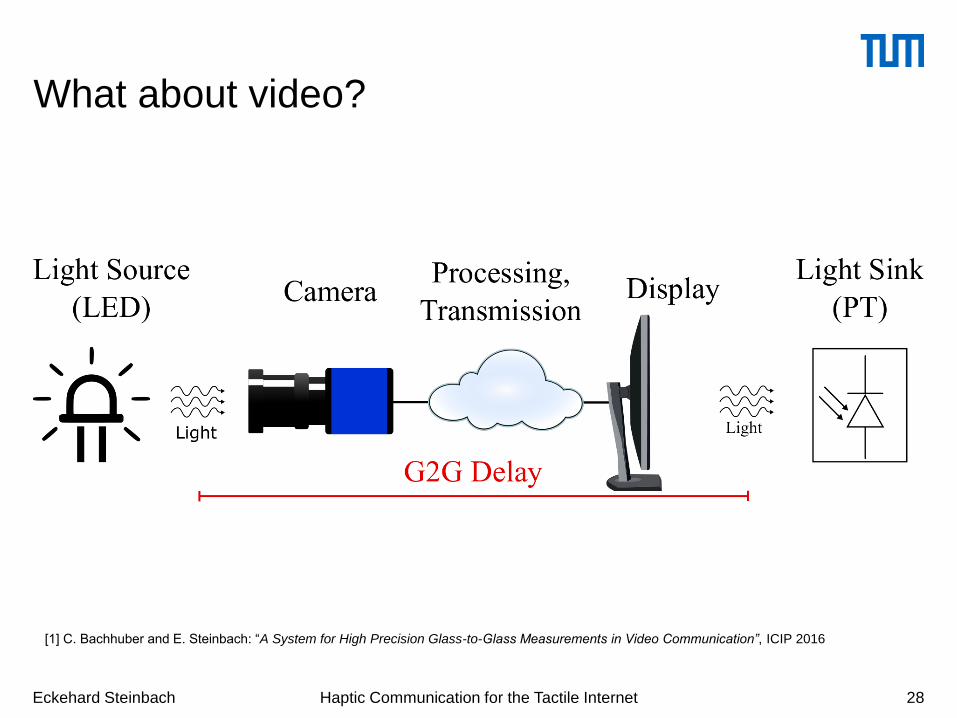
What about video?
28Eckehard Steinbach Haptic Communication for the Tactile Internet
[1] C. Bachhuber and E. Steinbach: “A System for High Precision Glass-to-Glass Measurements in Video Communication”, ICIP 2016

29Eckehard Steinbach (TUM)
Build instructions, Android Application and Arduino source code are available under
http://tinyurl.com/G2GDelay
Source: www.android.com Source: www.arduino.cc
Measuring G2G delay

G2G Delay Survey: Results
30
• Video conferencing systems
• G2G delay > 200ms

G2G Delay Survey: Results
31
• Video feedback in drone remote
control
• DJI > 250ms (focus on high quality
and reliability)
• FatShark analog 28ms
• FatShark digital 55ms
Source: www.droneuplift.com

G2G Delay Survey: Results
32
• Smartphones camera app
80-100ms
Source: www.pcadvisor.co.uk
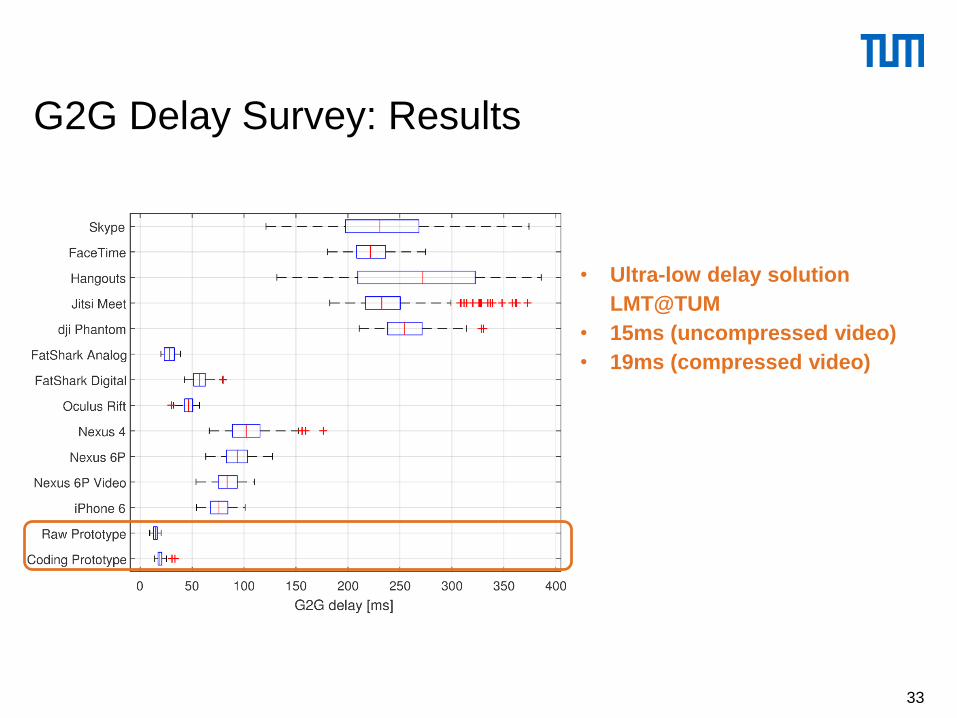
G2G Delay Survey: Results
33
• Ultra-low delay solution
LMT@TUM
• 15ms (uncompressed video)
• 19ms (compressed video)

Demo video
34

35
Standardization
https://standards.ieee.org/develop/project/1918.1.html
Eckehard Steinbach Haptic Communication for the Tactile Internet

Task Group: Haptic Codecs for the Tactile Internet
36
IEEE P1981.1.1
Chair: Eckehard Steinbach (TUM), Vice Chair: Mohammad Eid
(NYUAD), Secretary: Qian Liu (Dalian Univ.)
Scope
□ Protocol for the exchange of device capabilities (handshaking)
□ (Perceptual) codec for closed-loop kinesthetic information
□ (Perceptual) codec for open-loop tactile information
http://grouper.ieee.org/groups/1918/1/haptic_codecs/index.html
Eckehard Steinbach Haptic Communication for the Tactile Internet

Haptic communication as a key technology for physical interaction
across networks
Fundamental difference between kinesthetic interaction (closed-loop)
and tactile feedback (open-loop)
Compression of kinesthetic data fundamentally different from A/V
Time-delayed teleoperation requires joint optimization of
communication, compression and control
Different control approaches for different delay ranges
Tactile feedback displays open new opportunities
G2G delay of video communication solutions needs to be further
reduced
37
Summary
Eckehard Steinbach Haptic Communication for the Tactile Internet

Acknowledgments
38
Current and former PhD students: P. Hinterseer, J. Kammerl, F.
Brandi, R. Chaudhari, X. Xu, B. Cizmeci, C. Schuwerk, Matti
Strese
Collaborators
S. Chaudhuri (IIT Bombay)
S. Hirche, M. Buss and I. Vittorias (TUM)
B. Färber and V. Nitsch (University of Armed Forces Munich)
A. El Saddik and J. Cha (University of Ottawa)
K. Kuchenbecker (University of Pennsylvania)
S. Choi (POSTECH, Korea)
Funding
DFG SFB 453, DFG STE 1093/4-1, 1093/4-2, 1093/6-1
ERC Grant 258941 “ProHaptics”
European-Brazilian Network for Academic Exchange EUBRANEX
Eckehard Steinbach Haptic Communication for the Tactile Internet

The end
39
Thank you !
Eckehard Steinbach Haptic Communication for the Tactile Internet