tÉcnico en pesca deportiva y buceo … · buceo y al concluir el módulo el estudiante adquirirá...
TRANSCRIPT

TÉCNICO EN PESCA DEPORTIVA Y BUCEO
MÓDULO II
MÉXICO 2005
TÉCNICO EN PESCA DEPORTIVA Y BUCEO
MÓDULO II
MÉXICO 2005

Componente de Formación Profesional del Bachillerato Tecnológico
CARRERA DE TÉCNICO EN PESCA DEPORTIVA Y BUCEO
CLAVE: BTMPEP04
MÓDULO II Operación de embarcaciones con motor estacionario
CLAVE: PPE317
Agosto de 2005
2
Reforma Curricular del Bachillerato Tecnológico (Acuerdo 345)
Técnico en Pesca Deportiva y Buceo CLAVE: BTMPEP04
MÓDULO II Paquete didáctico
Profesores que elaboraron la estructura y el programa de estudio del módulo II Arturo Arzola Ayala, Raúl Salazar Miranda y Oscar Covarrubias Salazar. Coordinador del Componente de Formación Profesional: M. en C. Daffny Rosado Moreno Coordinadores de la DGECyTM: M. en C. Gildardo Rojo Salazar Ocean. Víctor Manuel Rojas Reynosa Q. B. P. Francisco Escamilla Rodríguez Biól. Rodrigo Nava Mora Edición: M. en C. Itzia Calixto Albarrán M. en C. Jessica Noemi Montaño Vargas Primera edición: 2005. Subsecretaría de Educación Media Superior, SEP. Dirección General de Educación en Ciencia y Tecnología del Mar. Dirección Técnica. ISBN: (En trámite)

3
DIRECTORIO
Dr. Reyes S. Tamez Guerra Secretario de Educación Pública Dra. Yoloxóchitl Bustamante Díez Subsecretaria de Educación e Investigación Tecnológicas Biól. Francisco Brizuela Venegas Director General de Educación en Ciencia y Tecnología del Mar M. en C. Gildardo Rojo Salazar Director Técnico de la DGECyTM Ing. Heriberto Nolasco Heredia Director de Operación de la DGECyTM C. P. María Elena Colorado Álvarez Coordinadora Administrativa de la DGECyTM Ocean. Víctor Manuel Rojas Reynosa Jefe del Departamento de Control Escolar de la DGECyTM Q. B. P. Francisco Escamilla Rodríguez Jefe del Departamento de Planes y Programas de Estudio de la DGECyTM

4
ÍNDICE PÁG. Directorio 3 Índice 4 Mensaje a los maestros del Bachillerato Tecnológico 5 I. Carrera de Técnico en Pesca Deportiva y Buceo 6 Antecedentes 7 Descripción de la carrera 9 Plan de estudios de la carrera 10 Perfiles de ingreso y egreso 11 Relación de módulos con normas de competencia y sitios de inserción laboral 12 II: Programas de estudio 13 Descripción general del módulo 14 Desarrollo didáctico de los submódulos 15 Submódulo I. Nomenclatura náutica y tecnología naval en embarcaciones con
motor estacionario 15 Submódulo II. Aspectos básicos del funcionamiento de los motores estacionarios 22 Submódulo III. Operación de equipo de navegación y comunicación 27 Submódulo IV Navegación en embarcaciones que operan con motor estacionario 31 III. Bibliografía 40 IV. Guía didáctica 41 V. Instrumento de evaluación 61 VI. Guía de aprendizaje 93

5
MENSAJE DE LA SUBSECRETARIA DE EDUCACIÓN MEDIA SUPERIOR
Con la Reforma Curricular del Bachillerato Tecnológico estamos construyendo la casa que queremos habitar y proponemos compartir con los estudiantes, los padres de familia, las comunidades y barrios donde se ubica cada plantel. Construimos un espacio para la mejor formación de las nuevas generaciones, para contribuir a elevar la calidad de vida de los mexicanos, para el mejor futuro de las culturas que amalgama la nación que amamos. El componente de formación profesional aporta al Bachillerato Tecnológico el carácter bivalente que le distingue, ya que los estudiantes pueden continuar sus estudios en la educación superior e incorporarse al trabajo, si así lo deciden. En la Reforma, procuramos que la estructura modular de las carreras se oriente hacia los sitios de inserción en los mercados de trabajo; que cada módulo desarrolle de manera integral las competencias profesionales, para responder a los requerimientos que reclaman los cambios en la producción de las diversas regiones de nuestro país y para favorecer la formación de los ciudadanos de la nación más equitativa, democrática y prospera que anhelamos. Los programas de los módulos son el resultado del trabajo colegiado de los profesores que imparten la formación profesional en el Bachillerato Tecnológico, quienes nos brindan su experiencia y conocimientos al elaborar esta propuesta inicial, que ahora está abierta para recibir los aportes de cada maestro. Maestro (a) le necesitamos para construir la casa que nos hace falta para formar mejor a nuestros jóvenes, a las mujeres y los hombres del mañana.
Yoloxóchitl Bustamante Díez

6
I. CARRERA DE TÉCNICO EN PESCA DEPORTIVA Y BUCEO

7
ANTECEDENTES
La generación del componente de formación profesional y el diseño de las carreras que lo integran se ha realizado de acuerdo con las directrices que se establecen en el Programa Nacional de Educación1, el Programa de Desarrollo de la Educación Tecnológica2, el Modelo de la Educación Media Superior Tecnológica3 y la Estructura del Bachillerato Tecnológico4. Para encausar el proceso de generación del componente se elaboraron los Lineamientos para la Estructuración del Componente de Formación Profesional, que establece los criterios para orientar una construcción que parte de la oferta de carreras preexistentes. Estas directrices fueron elaboradas por la Coordinación del componente, tomando en cuenta los resultados sucesivos del trabajo realizado en seis talleres, efectuados entre junio de 2003 y noviembre de 2004, con maestros de de la Dirección General de Educación Tecnológica Industrial (DGETI), de los Colegios de Estudios Científicos y Tecnológicos de los Estados (CECyTEs), de la Dirección General de Educación Tecnológica Agropecuaria (DGETA) y de la Dirección General de Educación en Ciencia y Tecnología del Mar (DGECyTM); docentes entre los cuales cabe mencionar la participación de quienes cuentan con experiencia en el diseño y la operación de programas de educación basada en competencias, que se han impartido en estas instituciones desde 1997. La diversidad de carreras preexistentes se organizó en campos de formación profesional, delimitados a partir de la identificación de procesos de trabajo similares de acuerdo con los objetos de transformación y el grado de calificación que les caracterizan. Este ordenamiento ha permitido, por una parte, valorar la evolución de la cobertura del conjunto de la oferta ante las tendencias de los sectores de la producción y el empleo en México, así como precisar prioridades para orientar cambio y dar seguridad a los avances. Por otra parte, mostró las carreras que resultan comunes entre las instituciones. En el diseño de las carreras del componente se ha procurado desarrollar a partir de las competencias profesionales asociadas con los posibles sitios de inserción en los mercados de trabajo, a los que cada uno se dirige; así como observar en el proceso de formación el cumplimiento de las normas de seguridad e higiene y de protección al medio ambiente. La propuesta que a continuación se presenta tiene el propósito de orientar el desarrollo del trabajo docente en las carreras que ahora son comunes entre la DGETI, DGETA, DGECyTM y CECyTEs, mediante la estructura de la carrera y la versión sintética de los programas de estudio del primer módulo. Ambos productos se obtuvieron en el taller realizado con los maestros convocados para ello, por cada una de esas instituciones, quienes son los autores principales de esa propuesta. La experiencia y los resultados de ese trabajo muestran un método para la generación de la estructura modular de las carreras y el diseño de los programas. Ahora se presentan los programas del primer módulo, los correspondientes a los siguientes módulos se integrarán a
1 Secretaría de Educación Pública, Programa Nacional de Educación 2001-2006, ISBN: 970-18-6213-9 2Secretaría de Educación Pública, Programa de de Desarrollo de la Educación Tecnológica 2001-2006, ISBN: 970-18-8043-9 3Consejo del Sistema Nacional de Educación Tecnológica, Modelo de la Educación Media Superior Tecnológica, ISBN 968-5961-00X 4Consejo del Sistema Nacional de Educación Tecnológica, Estructura del Bachillerato Tecnológico. ISBN 968-5961-01-8

8
este documento y estarán a su disposición de manera sucesiva próximamente. Asimismo, se ha previsto dar seguimiento a la operación de los programas con el propósito de establecer los ajustes que permitan mejorarlos. En cuanto a la estructura de la carrera, destaca la intención de procurar obtener del mundo del trabajo los criterios organizadores de cada propuesta de formación profesional. En los programas de estudios de los submódulos se aportan elementos para apoyarle en la elección que usted realizará de las estrategias específicas para lograr los aprendizajes de los estudiantes. En este sentido adquiere relevancia el lugar que se da a los resultados del aprendizaje en tanto referencia para orientar la definición de las tareas que permita alcanzarlos, sobre las cuales se identifican tres momentos didácticos: de apertura, desarrollo y cierre. En términos generales, la apertura se dirige a explorar y recuperar los conocimientos previos e intereses de los estudiantes y los aspectos del contexto que resultan relevantes. Explicitar estos hallazgos con los estudiantes permite afinar, entre otros aspectos, las principales actividades de aprendizaje y la evaluación de éste. En la fase de desarrollo, se avanza en el despliegue de nuevos conocimientos, habilidades y actitudes. Y en la de cierre, se propone a los estudiantes elaborar las conclusiones que le permiten advertir el aprendizaje que han logrado y, con ello, el distinto lugar en el que se encuentra cada uno después de transitar por las experiencias realizadas. En relación con estas fases en los programas, se sugieren los recursos de apoyo y las técnicas e instrumentos de evaluación. Mediante el análisis del programa de estudio, cada maestro podrá establecer la Guía didáctica propia, que defina las actividades específicas que estime pertinentes para lograr los resultados del aprendizaje de acuerdo con su experiencia, las posibilidades de los estudiantes, las condiciones del plantel y el contexto. Para la educación media superior tecnológica, usted maestro (a) es el (la) autor (a) de las experiencias que se despliegan en el taller, el laboratorio, el aula y el contexto laboral para favorecer aprendizajes significativos que contribuyan a mejorar la calidad de vida de los jóvenes estudiantes.

9
DESCRIPCIÓN DE LA CARRERA Las instituciones educativas que ofrecen la carrera de Técnico en Pesca Deportiva y Buceo se encuentran ubicadas en los puertos de la República Mexicana, donde se encuentran las zonas que reúnen las condiciones para desarrollar esta actividad. Es necesario formar técnicos en pesca deportiva y buceo de manera sistemática y suficiente, con la habilidad y destreza dado por un aprendizaje significativo que les permita el manejo del material, equipo y herramientas para la labor que van a desempeñar en el sector de la pesca deportiva, ribereña y servicios demandados por este sector Los estudiantes de esta carrera realizarán, en el primer módulo, la operación del motor fuera de borda, en el cual desarrollarán actividades de la operación y navegación de embarcaciones con motor fuera de borda; así como, realizara los trámites legales y ambientales para las embarcaciones con motor fuera de borda y al concluir el módulo el estudiante adquirirá la competencia como operador –navegador de embarcaciones con motor fuera de borda.. En el módulo II el estudiante operara una embarcación con motor estacionario y al concluir el módulo tendrá la competencia como patrón de embarcaciones pesqueras deportivas. En el módulo III denominado Preparación de los equipos pesqueros deportivos y al concluir el módulo el estudiante adquirirá la competencia como Preparador de artículos pesqueros deportivos. En el módulo IV llamado Operación de equipos pesqueros deportivos y técnicas básicas de buceo y al concluir el módulo el estudiante adquirirá competencia como operador de equipos pesqueros deportivos y de buceo. Al concluir el módulo V, denominado Guía de buceo deportivo, el estudiante habrá adquirido las competencias para desempeñarse como instructor de buceo deportivo.

10
PLAN DE ESTUDIOS DE LA CARRERA DE TÉCNICO EN PESCA DEPORTIVA Y BUCEO (Acuerdo345)
Horas/Semana
Semestre 1 Semestre 2 Semestre 3 Semestre 4 Semestre 5 Semestre 6
Álgebra 4 horas
Geometría y Trigonometría
4 horas
Geometría Analítica 4 horas
Cálculo 4 horas
Probabilidad y Estadística
5 horas
Taller de Matemática
Aplicada 5 horas
Inglés I 3 horas
Inglés II 3 horas
Inglés III 3 horas
Inglés IV 3 horas
Inglés V 5 horas
Optativa 5 horas
Química I 4 horas
Química II 4 horas
Biología 4 horas
Física I 4 horas
Física II 4 horas
Asignatura específica del área
propedéutica correspondiente (1)
5 horas
Tecnologías de la Información y la Comunicación
3 horas
Lectura, Expresión Oral y Escrita II
4 horas
Ciencia, Tecnología, Sociedad y Valores II
4 horas
Ecología 4 horas
Ciencia, Tecnología, Sociedad y Valores III
4 horas
Asignatura específica del área
propedéutica correspondiente (2)
5 horas Ciencia,
Tecnología, Sociedad y Valores
I 4 horas
Lectura, Expresión Oral y Escrita
4 horas
Operación de embarcaciones con
motor fuera de borda
17 horas
Operación de embarcaciones con motor estacionario
17 horas
Preparación de los equipos pesqueros deportivos 17 horas
Operación de los equipos pesqueros
deportivos y técnicas
básicas de buceo
12 horas
Guía de buceo deportivo 12 horas
COMPONENTE DE FORMACIÓN BÁSICA
COMPONENTE DE FORMACIÓN
PROPEDÉUTICA
COMPONENTE DE FORMACIÓN PROFESIONAL

11
PERFILES DE INGRESO Y EGRESO
DE INGRESO El candidato debe tener:
a) La habilidad para comunicarse apropiadamente e interpretar instrucciones escritas y verbales.
b) Razonamiento formal que le facilite la resolución de problemas lógicos y cotidianos. c) Disponibilidad para el trabajo en equipo. d) Aplicación de valores. e) Capacidad de construcción de su propio conocimiento. f) Sensibilidad a los aspectos ecológicos y de protección al ambiente. g) Conocimientos de matemáticas básicas y manejo de instrumentos de cálculo. h) Vocación de servicio i) Organizado j) Liderazgo: sociable, creativo y amable.
DE EGRESO El egresado tendrá una capacitación integral de los conocimientos adquiridos durante su formación profesional, aplicando las experiencias y habilidades para desarrollar la pesca deportiva y el buceo, que les permitirá insertarse en el sector productivo y laboral de una forma competente, cumpliendo con los requerimientos de las empresas dedicadas a la pesca deportiva, el buceo y las recreaciones acuáticas.

12
RELACIÓN DE MÓDULOS CON NORMAS DE COMPETENCIA Y SITIOS DE INSERCIÓN LABORAL
Módulo Normas de competencia Sitios de inserción
I. Operación de embarcaciones con motor fuera de borda
272 horas
CPES0273.02 UPES0640.02 UPES0641.02
CPESO081.01 UPES0192.01
• Empresas del sector social y privado dedicadas a la pesca deportiva, buceo y recreación.
• Tiendas de autoservicio y venta de motores fuera de borda y embarcaciones.
• Marinas húmedas. • Sociedades cooperativas dedicadas a la
pesca ribereña. • Sector privado dedicado a la pesca ribereña.• Instituciones públicas • En su propia empresa. • En los propios Centros de Estudios
Tecnológicos del Mar.
II. Operación de embarcaciones con motor estacionario
272 horas
CPES008101 UPES019201 E00515 E00516 E00517 E00518 UPES0193.01 E00519 E00520
• Empresas del sector social y privado dedicadas a la pesca deportiva, buceo y recreación.
• Marinas húmedas. • Sociedades cooperativas dedicadas a la
pesca ribereña. • Sector privado dedicado a la pesca ribereña.• Instituciones públicas • En su propia empresa. • Navieras marinas • En los propios Centros de Estudios
Tecnológicos del Mar. III Preparación de los equipos pesqueros deportivos
272 horas
IV Operación de los equipos pesqueros deportivos y técnicas básicas de buceo
192 horas
V. Guía de buceo deportivo
192 horas

13
I. PROGRAMA DE ESTUDIOS

14
DESCRIPCIÓN GENERAL DEL MÓDULO MÓDULO II: Operación de embarcaciones con motores estacionarios CLAVE: PPE317 Justificación del módulo
Actualmente, existe una importante demanda, de las empresas del sector social y privado dedicadas a la pesca deportiva, buceo y otros servicios, de contar con recursos humanos competentes en el manejo de instrumentos y equipos de navegación, para que operen sus embarcaciones con motores estacionarios y desarrollar las actividades de este sector. Por lo anterior, es de suma importancia la capacitación del estudiante en la operación de embarcaciones con motores estacionarios que les permitirá solventar las necesidades de estas empresas. Requisitos de ingreso al módulo
a) La habilidad para comunicarse apropiadamente e interpretar instrucciones escritas y verbales.
b) Razonamiento formal que le facilite la resolución de problemas lógicos y cotidianos. c) Disponibilidad para el trabajo en equipo. d) Aplicación de valores. e) Capacidad de construcción de su propio conocimiento. f) Sensibilidad a los aspectos ecológicos y de protección al ambiente. g) Conocimientos de matemáticas básicas y manejo de instrumentos de cálculo.
Duración del módulo 272 horas Submódulos que lo integran I.- Nomenclatura náutica y tecnología naval en embarcaciones con 44 horas motores estacionarios CLAVE: PPE31044 II.- Aspectos básicos del funcionamiento de los motores estacionarios 39 horas CLAVE: PPE32039 III.-Operación de equipo de navegación y comunicación 68 horas CLAVE: PPE33068 IV- Navegación con embarcaciones que operan con motor estacionario 121 horas CLAVE: PPE34121 Resultado de aprendizaje Navegar con embarcaciones que contengan motores estacionarios y operar los equipos de navegación y comunicación a bordo.

15
SUBMÓDULO I
Nomenclatura náutica y tecnología naval en embarcaciones con motores estacionarios

16
MÓDULO II Operación de embarcaciones con motores estacionarios 272 horas
SUBMÓDULO I Nomenclatura náutica y tecnología naval en embarcaciones con motores estacionarios 44 horas
ELEMENTOS DE EVALUACIÓN Lista de cotejo; Cuestionarios; Guía de observación.
RESULTADO DE APRENDIZAJE
Identificar los componentes generales, dimensiones y de seguridad en una embarcación con motor estacionario
GUÍA DIDÁCTICA
CONTENIDO ESTRATEGIAS DE APRENDIZAJE MATERIALES Y EQUIPO DE APOYO EVALUACIÓN
1.-Dimensiones de una embarcación con motor estacionario.
1.1 Conceptos generales 1.1.1 Eslora, manga,
puntal, francobordo, calado, asiento, desplazamiento y arqueo.
1.1.2 Componentes del
casco y cubierta 1.1.3 Elementos de amarre
ENCUADRE: Presentar los módulos y submódulos del componente profesional. Establecer el cumplimiento de las reglas de tareas y evaluaciones. Seleccionar al grupo en equipos de trabajo para identificar los componentes generales y dimensiones de una embarcación con motor estacionario. APERTURA: Utilizar técnicas de grupos con dinámicas acorde
• Modelos didácticos a escala de embarcaciones con motores estacionarios
• Barcos escuela • Embarcaciones
deportivas • Proyector de acetatos • Rota folios • Pizarrón • Videos • Televisión • Cañón • Videocasetera • Computadora
Lista de cotejo Cuestionarios Evaluación oral Evaluación escrita Guía de observación. Participación activa Actividades de campo Ejercicios prácticos

17
CONTENIDO ESTRATEGIAS DE APRENDIZAJE MATERIALES Y EQUIPO DE APOYO EVALUACIÓN
y fondeo 1.2 Estabilidad y
flotabilidad 1.2.1Definición de
estabilidad, flotabilidad, carena, empuje, centro de gravedad, metacentro, distribución de pesos a bordo, escora y asiento.
1.3. Equipo de seguridad. 1.3.1. Contra incendio
(clasificación de incendios y equipo)
1.3.2. Versos del capitán
Thomas Greay 1.3.3 Código internacional
de banderas
al tema propuesto. Demostrar el conocimiento previo de las dimensiones de embarcaciones, componentes del casco y cubierta, así como los elementos de amarre y fondeo. DESARROLLO: Indagar información bibliográfica y de campo sobre la nomenclatura náutica de embarcaciones con motor estacionario. Recopilar información bibliográfica y de campo sobre tecnología naval de embarcaciones con motor estacionario. Identificar las principales dimensiones de las embarcaciones con motores estacionarios. Calcular las diferentes capacidades de las embarcaciones con motores estacionarios. Señalar los componentes del casco. Señalar los componentes ubicados en la cubierta de las embarcaciones con motor estacionario
• Cabos • Cadena • Grilletes • Anclas • Boya • Bibliografía • Visitas • Conferencias • Software de seguridad
de la vida en el mar • Extinguidotes
(extintores) • Banderas (código)
Trabajos de indagación Entrevistas Planteamiento de problemas Juegos de roles Libreta de apuntes

18
CONTENIDO ESTRATEGIAS DE APRENDIZAJE MATERIALES Y EQUIPO DE APOYO EVALUACIÓN
1.3.4 Balizamiento 1.3.5 Boyas luminosas
Investigar e identificar los elementos de amarre utilizados en el sector marítimo (cabo, chicote, seno, gasa, firme, y vuelta). Investigar e identificar los elementos de fondeo utilizados en el sector marítimo (muertos, boyas y anclas). Mencionar los conocimientos previos sobre estabilidad. Definir el término de estabilidad Explicar el principio de flotabilidad Mencionar el principio de flotabilidad Explicar el centro de carena Describir el centro de carena Mencionar los principios de empuje Expresar los principios de empuje Explicar el centro de gravedad

19
CONTENIDO ESTRATEGIAS DE APRENDIZAJE MATERIALES Y EQUIPO DE APOYO EVALUACIÓN
Enunciar el centro de gravedad Describir el metacentro Definir el metacentro Explicar la distribución de los pesos a bordo Enunciar la distribución de los pesos a bordo. Explicar las escoras a bordo. Definir el término de escora Explicar el término de asiento. Enunciar la definición de asiento Explicar la clasificación y características de los incendios Describir la clasificación y características de los incendios Mencionar los equipos contra incendios Enlistar los equipos contra incendios.

20
CONTENIDO ESTRATEGIAS DE APRENDIZAJE MATERIALES Y EQUIPO DE APOYO EVALUACIÓN
Demostrar el uso de los equipos contra incendios Utilizar los equipos contra incendios. Ilustrar los versos del Cap. Thomas Gray Interpretar los versos del Cap. Thomas Gray. Explicar el código internacional de banderas. Describir el código internacional de banderas. Describir los elementos de balizamiento Interpretar los elementos de balizamiento. Ilustrar las diferentes boyas luminosas Interpretar el significado de las boyas luminosas. CIERRE: Realizar técnicas grupales por equipos. Realizar técnicas individuales.

21
CONTENIDO ESTRATEGIAS DE APRENDIZAJE MATERIALES Y EQUIPO DE APOYO EVALUACIÓN
Verificar la nomenclatura náutica y tecnología naval en embarcaciones con motores estacionarios Demostrar los componentes contenidos en el casco de una embarcación con motor estacionario. Demostrar los componentes ubicados en la cubierta de una embarcación con motor estacionario. Realizar los diferentes tipos de amarres aplicados al sistema de anclaje Verificar los conceptos de estabilidad, flotabilidad, carena, empuje, centro de gravedad, metacentro, distribución de pesos a bordo, escora y asiento Verificar los conceptos y uso del equipo de seguridad marítima.

22
SUBMÓDULO II
Aspectos básicos del funcionamiento de los motores estacionarios

23
MÓDULO II Operación de embarcaciones con motores estacionarios 272 horas
SUBMÓDULO II Aspectos básicos del funcionamiento de los motores estacionarios 39 horas
ELEMENTOS DE EVALUACIÓN Lista de cotejo; Cuestionarios; Guía de observación.
RESULTADO DE APRENDIZAJE Identificar los principios del funcionamiento de motores estacionarios
GUIA DIDACTICA
CONTENIDO ESTRATEGIAS DE APRENDIZAJE RECURSOS MATERIALES EVALUACIÓN
2.0 Funcionamiento de los motores estacionarios.
2.1 Marcas principales y
potencia de los motores estacionarios
2.1.1 Caterpillar 2.1.2 Cummins 2.1.3 General Motors 2.1.4 Perkins
APERTURA: Realizar técnicas grupales por equipos con dinámicas acordes a las actividades a desarrollar. DESARROLLO: Relatar los antecedentes históricos y campos de aplicación de los motores estacionarios. Consultar información sobre las marcas principales y potencia de motores estacionarios. Identificar el turbo alimentador.
• Bibliografía • Videos • Televisión • Videocasetera • Acetatos • Proyector de acetatos • Pizarrón • Computadora • Rota folios • Revistas y folletos • Manual de operación de
motor estacionario • Embarcación • Motor estacionario kt
225H
Lista de cotejo Cuestionario Examen oral Guía de observación Participación activa Actividades de campo Planteamiento de problemas

24
CONTENIDO ESTRATEGIAS DE APRENDIZAJE RECURSOS MATERIALES EVALUACIÓN
2.2 Componentes de los motores estacionarios
2.2.1Turbo alimentador 2.2.2 Inyectores 2.2.3 Bomba de inyección 2.2.4 Múltiple de escape 2.2.5 Filtros de aceite y
agua 2.2.6 Escape 2.2.7 Generador 2.3 Sistemas de los
motores estacionarios 2.3.1 Sistema de
combustible 2.3.2 Sistema de
encendido
Señalar la ubicación de los inyectores. Localizar la bomba de inyección. Ubicar el múltiple de escape Distinguir los filtros de aceite y agua Identificar el escape Localizar el generador. Consultar los manuales de operación de los motores estacionarios Explicar las partes componentes del sistema de combustible. Mostrar las partes que componen el sistema de combustible. Explicar las partes componentes del sistema de encendido Identificar las partes componentes del sistema de encendido
225Hp • Motor estacionario
seccionado. • Kit de herramientas
Libreta de apuntes

25
CONTENIDO ESTRATEGIAS DE APRENDIZAJE RECURSOS MATERIALES EVALUACIÓN
2.3.3 Sistema de lubricación
2.3.4 Sistema de enfriamiento 2.3.5 Sistema de
transmisión 2.4 Mantenimiento
preventivo y correctivo menor
2.4.1 Cambio de aceite y
filtros 2.4.2 Cambio de bandas y
mangueras 2.4.3 Revisión de niveles
(aceite, agua y anticongelante).
Explicar las partes componentes del sistema de lubricación Mostrar las partes componentes del sistema de lubricación Explicar las partes componentes del sistema de enfriamiento Identificar las partes componentes del sistema de enfriamiento Explicar las partes componentes del sistema de transmisión. Mostrar las partes componentes del sistema de transmisión Demostrar el cambio de aceite y filtros. Aplicar el cambio de aceite y filtros. Demostrar el cambio de bandas y mangueras Aplicar el cambio de bandas y mangueras. Demostrar la revisión de los niveles (aceite, agua y anticongelante)

26
CONTENIDO ESTRATEGIAS DE APRENDIZAJE RECURSOS MATERIALES EVALUACIÓN
CIERRE: Técnicas grupales por equipos. Técnicas individuales. Enlistar las marcas principales y potencias de los motores estacionarios. Identificar los componentes de los motores estacionarios Explicar los sistemas de los motores estacionarios. Aplicar mantenimiento preventivo y correctivo menor en los motores estacionarios.

27
SUBMÓDULO III
Operación de equipo de navegación y comunicación

28
MÓDULO II Operación de embarcaciones con motores estacionarios 272 horas
SUBMÓDULO III Operación de equipo de navegación y comunicación 68 horas ELEMENTOS DE EVALUACIÓN Lista de cotejo; Cuestionarios; Guía de observación.
RESULTADO DE APRENDIZAJE Operar los equipos de navegación y comunicación
GUÍA DIDÁCTICA
CONTENIDO ESTRATEGIAS DE APRENDIZAJE MATERIALES Y EQUIPO DE APOYO EVALUACIÓN
3.0 Equipo de navegación y comunicación.
3.1 Sistema de
posicionamiento global (G.P.S.)
3.1.1. Funcionamiento del
G.P.S 3.1.2 Manual de operación
del G.P.S. 3.2 Videosonda
APERTURA: Realizar técnicas grupales por equipos con dinámicas acordes a las actividades a desarrollar. DESARROLLO: Explicar el funcionamiento del sistema de posicionamiento global G.P.S. Operar el funcionamiento del sistema de posicionamiento global G.P.S. Demostrar el funcionamiento del sistema de posicionamiento global G.P.S.
• Manuales de operación de los equipos de navegación.
• Manuales de operación de los equipos de comunicación
• Rota folio • Pizarrón • Visitas • Proyectores de acetatos
Lista de cotejo Cuestionario Guía de observación Participación activa Actividades de campo Planteamiento de problemas Libreta de apuntes

29
CONTENIDO ESTRATEGIAS DE APRENDIZAJE MATERIALES Y EQUIPO DE APOYO EVALUACIÓN
3.2.1 Funcionamiento de la videosonda
3.2.2 Manual de operación
de la videosonda. 3.3 Radar 3.3.1 Funcionamiento del
radar 3.3.2 Manual de operación
del radar 3.4 Radio V.H.F. marino 3.4.1 Funcionamiento del
radio V.H.F marino 3.4.2 Manual de operación
del radio V.H.F. marino 3.5 Radio H.F. 3.5.1 Funcionamiento del
radio H.F.
Explicar el funcionamiento de la video sonda. Operar el funcionamiento de la video sonda Demostrar el funcionamiento de la video sonda. Explicar el funcionamiento del radar Operar el funcionamiento del radar Demostrar el funcionamiento del radar Explicar el funcionamiento del radio V.H.F marino Operar el funcionamiento del radio V.H.F. marino Demostrar el funcionamiento del radio V.H.F marino. Explicar el funcionamiento del radio H.F. Operar el funcionamiento del radio H.F Demostrar el funcionamiento del radio H.F.
• G.P.S. fijo marca FURUNO 1500
• G.P.S. portátil marca
MAGELLAN O GILLIGAN 500
• Videosonda Marca FURUNO
• Radar FURUNO • Radio V.H.F Marino
marca YASU de 156 - 180 Mhz
• Radio H.F. marca
FURUNO o YASU de 2 – 30 Mhz

30
CONTENIDO ESTRATEGIAS DE APRENDIZAJE MATERIALES Y EQUIPO DE APOYO EVALUACIÓN
3.5.2 Manual de operación
del radio H.F.
CIERRE : Técnicas grupales. Técnicas individuales. Verificar el funcionamiento del G.P.S, vides sonda, radar, radio V.H.F. marino y radio H.F.

31
SUBMÓDULO IV
Navegación en embarcaciones que operan con motor estacionario

32
MÓDULO II Operación de embarcaciones con motores estacionarios 272 horas
SUBMÓDULO IV Navegación en embarcaciones que operan con motor estacionario 121 horas ELEMENTOS DE EVALUACIÓN Lista de cotejo; Cuestionarios; Guía de observación.
RESULTADOS DE APRENDIZAJE Navegar en embarcaciones con motores estacionarios
GUIA DIDACTICA
CONTENIDO ESTRATEGIAS DE APRENDIZAJE MATERIALES Y EQUIPO DE APOYO EVALUACIÓN
4. Navegación con embarcaciones para pesca deportiva y recreativa.
4.1 Esfera terrestre 4.1.1. Definición de :
ejes, polos, ecuador, paralelos, meridianos, latitud y longitud
4.2 Compás magnético
APERTURA: Realizar introspección a cerca del dominio del tema por parte del grupo. DESARROLLO: Explicar el término de ejes terrestres Definir el término de ejes Explicar la definición de polos. Definir el concepto de polos
• Bibliografía • Planisferio • Globo terráqueo • Compás magnético • Cartas de navegación• Escuadras • Paralelas • Compás de punta • Embarcación
deportiva con motor estacionario
• Cabos de poliamida
• Lista de cotejo • Cuestionario • Guía de observación • Participación activa • Actividades de
campo • Planteamiento de
problemas

33
CONTENIDO ESTRATEGIAS DE APRENDIZAJE MATERIALES Y EQUIPO DE APOYO EVALUACIÓN
4.2.1 Uso del compás magnético 4.2.2 Desvío del compás magnético. 4.3 Husos horarios 4.3.1 Tiempo universal. 4.3.2 Hora local 4.4 Cartas de navegación 4.4.1 Tipos de cartas de navegación. 4.4.2 Rumbos y
distancia entre dos puntos
4.5 Navegación 4.5.1 Costera 4.6 Maniobras de
Explicar la definición de ecuador Definir el concepto de ecuador Explicar la definición de paralelos Definir el concepto de paralelos Explicar la definición de meridianos Definir el concepto de meridianos Explicar la definición de latitud Definir el concepto de latitud Explicar la definición de longitud Definir el concepto de longitud Describir el funcionamiento del compás magnético Demostrar el funcionamiento del compás magnético Ilustrar la división de los rumbos en el compás magnético
de 1-2 pulgadas de diámetro
• Anclas tipo danforth • Rota folio • Pizarrón • Visitas • Proyectores de
acetatos .
• Libreta de apuntes

34
CONTENIDO ESTRATEGIAS DE APRENDIZAJE MATERIALES Y EQUIPO DE APOYO EVALUACIÓN
atraque y desatraque en muelles.
4.6.1 Con viento de tierra 4.6.2 Con viento de mar. 4.6.3 Con corriente 4.6.4 Con viento y corriente 4.7 Maniobras de remolque 4.7.1 Con buen tiempo 4.7.2 Con mal tiempo
Localizar rumbos en el compás magnético. Explicar el procedimiento para saber los grados de desvío del compás magnético Determinar los grados de desvío del compás magnético Explicar el término de tiempo universal de acuerdo al meridiano de greenwich Demostrar el cálculo del tiempo universal de un punto geográfico. Describir los diferentes tipos de cartas de navegación Identificar los diferentes tipos de cartas de navegación. Diferenciar los diferentes tipos de cartas de navegación. Explicar los conceptos de los tipos de rumbos. Enunciar los diferentes tipos de rumbos Demostrar la determinación de los diferentes tipos de rumbos. Calcular los diferentes tipos de rumbos

35
CONTENIDO ESTRATEGIAS DE APRENDIZAJE MATERIALES Y EQUIPO DE APOYO EVALUACIÓN
Demostrar la navegación costera a bordo de embarcaciones con motores estacionarios Realizar la navegación costera a bordo de embarcaciones con motores estacionarios Describir las maniobras de atraque con viento de tierra Interpretar las maniobras de atraque con viento de tierra Describir las maniobras de desatraque con viento de tierra Interpretar las maniobras de desatraque con viento de tierra Describir las maniobras de atraque con viento de mar. Interpretar las maniobras de atraque con viento de mar. Describir las maniobras de desatraque con viento de mar. Interpretar las maniobras de desatraque con viento de mar. Describir las maniobras de atraque con corriente Interpretar las maniobras de atraque con corriente. Describir las maniobras de desatraque con corriente.

36
CONTENIDO ESTRATEGIAS DE APRENDIZAJE MATERIALES Y EQUIPO DE APOYO EVALUACIÓN
Interpretar las maniobras de desatraque con corriente. Describir las maniobras de atraque con viento y corriente. Interpretar las maniobras de atraque con viento y corriente. Describir las maniobras de desatraque con viento y corriente. Interpretar las maniobras de desatraque con viento y corriente. Realizar las maniobras de atraque con viento de tierra a bordo de embarcaciones con motores estacionarios Demostrar las maniobras de atraque con viento de tierra a bordo de embarcaciones con motores estacionarios Realizar las maniobras de desatraque con viento de tierra a bordo de embarcaciones con motores estacionarios Demostrar las maniobras de desatraque con viento de tierra a bordo de embarcaciones con motores estacionarios Efectuar las maniobras de atraque con viento de mar a bordo de embarcaciones con motores estacionarios

37
CONTENIDO ESTRATEGIAS DE APRENDIZAJE MATERIALES Y EQUIPO DE APOYO EVALUACIÓN
Demostrar las maniobras de atraque con viento de mar a bordo de embarcaciones con motores estacionarios Efectuar las maniobras de desatraque con viento de mar a bordo de embarcaciones con motores estacionarios Demostrar las maniobras de desatraque con viento de mar a bordo de embarcaciones con motores estacionarios Realizar las maniobras de atraque con corriente a bordo de embarcaciones con motores estacionarios Demostrar las maniobras de atraque con corriente a bordo de embarcaciones con motores estacionarios Realizar las maniobras de desatraque con corriente a bordo de embarcaciones con motores estacionarios Demostrar las maniobras de desatraque con corriente a bordo de embarcaciones con motores estacionarios Efectuar las maniobras de atraque con viento y corriente a bordo de embarcaciones con motores estacionarios Demostrar las maniobras de atraque con viento y corriente a bordo de embarcaciones con motores estacionarios

38
CONTENIDO ESTRATEGIAS DE APRENDIZAJE MATERIALES Y EQUIPO DE APOYO EVALUACIÓN
Realizar las maniobras de desatraque con viento y corriente a bordo de embarcaciones con motores estacionarios Demostrar las maniobras de desatraque con viento y corriente a bordo de embarcaciones con motores estacionarios Explicar los procesos de maniobras de remolque en el mar con buen tiempo Describir los procesos de maniobras de remolque en el mar con buen tiempo Aplicar los procesos de maniobras de remolque en el mar con buen tiempo a bordo de embarcaciones con motor estacionario Demostrar los procesos de maniobras de remolque en el mar con buen tiempo a bordo de embarcaciones con motor estacionario. Explicar los procesos de maniobras de remolque en el mar con mal tiempo Describir los procesos de maniobras de remolque en el

39
CONTENIDO ESTRATEGIAS DE APRENDIZAJE MATERIALES Y EQUIPO DE APOYO EVALUACIÓN
mar con mal tiempo Aplicar los procesos de maniobras de remolque en el mar con mal tiempo a bordo de embarcaciones con motor estacionario Demostrar los procesos de maniobras de remolque en el mar con mal tiempo a bordo de embarcaciones con motor estacionario. CIERRE : Técnicas grupales. Técnicas individuales. Verificar el trazado de rumbos sobre las cartas de navegación Comprobar el proceso de navegación costera a bordo de la embarcación con motor estacionario Verificar las maniobras de atraque, desatraque y remolque de embarcaciones con motor estacionario.

40
BIBLIOGRAFÍA Yamaha Outboards, All Engines. 1998. Manual de motores fuera de borda. Editorial Distribuidora Occen, S.A. de C.V. México. Scott, F. 2000. Mercury – Mariner Outboards todos los motores. Editorial Distribuidora Occen, S.A de C.V. México. Joan, C., and Clarence. 1989. Marine outboard, Volumen I. Seloc´s Marine Outboard. Joan, C. and Clarence. 1988. Yamaha outboard, Volumen II. Seloc publications. Joan, C. and Clarence. 2003. Johson / Evinrude Outboards. Seloc Marine. México. Hewitt, D. 1998. Motores de barco. Ediciones Pirámide S.A.

41
CARRERA DE TÉCNICO EN PESCA DEPORTIVA Y BUCEO
CLAVE: BTMPEP05
GUÍA DIDÁCTICA
MÓDULO II Operación de embarcaciones con motores estacionarios
CLAVE: PPE317
Agosto de 2005

42
MÓDULO II Operación de embarcaciones con motores estacionarios. 272 horas
SUBMÓDULO I Nomenclatura náutica y tecnología naval en embarcaciones con motores estacionarios. 44 horas
ELEMENTOS DE EVALUACIÓN Cuestionarios; Guías de observación; Listas de cotejo
RESULTADOS DE APRENDIZAJE
Identificar los componentes generales, dimensiones y de seguridad en una embarcación con motor estacionario
GUÍA DIDÁCTICA
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M) RECURSOS MATERIALES
1. Dimensiones de una embarcación con motor estacionario
1.1 Conceptos generales
1.1.1 Eslora, manga, puntal, francobordo, calado, asiento, desplazamiento y arqueo
1.1.2 Componentes del casco y
cubierta
1.1.3. Elementos de amarre y fondeo
(M) Explicar los conceptos sobre tecnología naval de embarcaciones con motor estacionario. (A) Recopilar información bibliográfica y de campo sobre tecnología naval de embarcaciones con motor estacionario. (M) Explicar las principales dimensiones de las embarcaciones con motores estacionarios. (A) Identificar las principales dimensiones de las embarcaciones con motores estacionarios. (M) Resolver problemas relativos a las diferentes capacidades de las embarcaciones con motores estacionarios.
• Videos • Cabos • Cadena • Grilletes • Software de seguridad de la vida
en el mar • Modelos didácticos a escala de
embarcaciones con motores estacionarios
• Proyector de acetatos • Rota folios • Pizarrón • Televisión • Video casetera • Anclas

43
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M) RECURSOS MATERIALES
(T = 17 horas)
(A) Calcular las diferentes capacidades de las embarcaciones con motores estacionarios. (M) Mostrar los componentes del casco. (A) Señalar los componentes del casco. (M) Señalar los componentes ubicados en la cubierta de las embarcaciones con motor estacionario. (A) Mostrar los componentes ubicados en la cubierta de las embarcaciones con motor estacionario. (M) Mostrar los elementos de amarre utilizados en el sector marítimo (cabo, chicote, seno, gasa, firme, y vuelta). (A) Demostrar los elementos de amarre utilizados en el sector marítimo (cabo, chicote, seno, gasa, firme, y vuelta). (M) Realiza actividades con los elementos de fondeo utilizados en el sector marítimo (muertos, boyas y anclas). (A) Investigar e identificar los elementos de fondeo utilizados en el sector marítimo (muertos, boyas y anclas).
• Extinguidotes (extintores) • Cañón • Computadora

44
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M) RECURSOS MATERIALES
1.2. Estabilidad y flotabilidad 1.2.1. Definición de estabilidad,
flotabilidad, carena, empuje, centro de gravedad, metacentro, distribución de pesos a bordo, escora y asiento
(T = 10 horas)
(M) Mencionar los conocimientos previos sobre estabilidad. (A) Definir el término de estabilidad. (M) Explicar el principio de flotabilidad. (A) Mencionar el principio de flotabilidad. (M) Explicar y describir el centro de carena. (M) Describir el centro de carena. (M) Mencionar los principios de empuje. (A) Expresar los principios de empuje. (M) Explicar el centro de gravedad. (A) Enunciar el centro de gravedad. (M) Describir el metacentro. (A) Definir el metacentro. (M) Explicar la distribución de los pesos a bordo. (A) Enunciar la distribución de los pesos a bordo.
• Modelos didácticos a escala de embarcaciones con motores estacionarios
• Proyector de acetatos • Rota folios • Pizarrón

45
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M) RECURSOS MATERIALES
1.3. Equipo de seguridad. 1.3.1. Contraincendio
(clasificación de incendios y equipo)
1.3.2. Versos del capitán Thomas
Grey 1.3.3 Código internacional de
banderas 1.3.4 Balizamiento 1.3.5 Boyas luminosas
(T = 17 horas)
(M) Explicar las escoras a bordo. (A) Definir el término de escora. (M) Explicar el término de asiento. (A) Enunciar la definición de asiento. (M) Explicar la clasificación y características de los incendios. (A) Describir la clasificación y características de los incendios. (M) Mencionar los equipos contra incendios. (A) Enlistar los equipos contra incendios. (M) Demostrar el uso de los equipos contra incendios. (A) Utilizar los equipos contra incendios. (M) Ilustrar los versos del Cap. Thomas Grey. (A) Interpretar los versos del Cap. Thomas Grey. (M) Explicar el código internacional de banderas.
• Gasolina • Diesel • Estopa • Banderas (código) • Extinguidotes (extintores)

46
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M) RECURSOS MATERIALES
(A) Describir el código internacional de banderas. (M) Describir los elementos de balizamiento. (A) Interpretar los elementos de balizamiento. (M) Ilustrar e interpretar las diferentes boyas luminosas.

47
MÓDULO II Operación de embarcaciones con motores estacionarios. 272 horas
SUBMÓDULO II Aspectos básicos del funcionamiento de los motores estacionarios. 39 horas
ELEMENTOS DE EVALUACIÓN Cuestionarios; Guías de observación; Listas de cotejo, Reportes.
RESULTADOS DE APRENDIZAJE Identificar los principios del funcionamiento de motores estacionarios
GUÍA DIDÁCTICA
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M) RECURSOS MATERIALES
2.1. Marcas principales y potencia de los motores estacionarios
2.1.1. Caterpillar 2.1.2. Cummins 2.1.3. General Motors 2.1.4. Perkins
(T = 8 horas)
(M) Relatar los antecedentes históricos y campos de aplicación de los motores estacionario. (A) Consultar información sobre las marcas principales y potencia de motores estacionarios.
• Folletos

48
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M) RECURSOS MATERIALES
2.2. Componentes de los motores estacionarios
2.2.1. Turbo alimentador 2.2.2. Inyectores 2.2.3. Bomba de inyección 2.2.4. Múltiple de escape 2.2.5. Filtros de aceite y agua 2.2.6. Escape 2.2.7. Generador
(T = 17 horas)
(M) Señalar el turbo alimentador. (A) Mostrar el turbo alimentador. (M) Mostrar la ubicación de los inyectores. (A) Señalar la bomba de inyección. (M) Ubicar el múltiple de escape. (A) Identificar el múltiple de escape. (M) Mostrar los filtros de aceite y agua. (A) Distinguir los filtros de aceite y agua. (M) Señalar el escape. (A) Identificar el escape. (M) Mostrar el generador. (A) Localizar el generador.
• Videos • Acetatos • Rota folios • Revistas y folletos • Manual de operación de motor
estacionario • Televisión • Vídeo casetera • Proyector de acetatos • Pizarrón • Computadora • Embarcación

49
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M) RECURSOS MATERIALES
2.3. Sistemas de los motores estacionarios
2.3.1. Sistema de combustible 2.3.2. Sistema de encendido 2.3.3. Sistema de lubricación 2.3.4. Sistema de enfriamiento 2.3.5. Sistema de transmisión
(T = 8 horas)
(A) Consultar los manuales de operación de los motores estacionarios. (M) Explicar las partes componentes del sistema de combustible. (A) Mostrar las partes que componen el sistema de combustible. (M) Explicar las partes componentes del sistema de encendido. (A) Identificar las partes componentes del sistema de encendido. (M) Explicar las partes componentes del sistema de lubricación. (A) Mostrar las partes componentes del sistema de lubricación. (M) Explicar las partes componentes del sistema de enfriamiento. (A) Identificar las partes componentes del sistema de enfriamiento. (M) Explicar las partes componentes del sistema de transmisión. (A) Mostrar las partes componentes del sistema de transmisión.
• Motor estacionario kt 225Hp • Motor estacionario seccionado. • Kit de herramientas • Videos • Acetatos • Rota folios • Revistas y folletos • Manual de operación de motor
estacionario • Motor estacionario kt 225 HP • Motor estacionario seccionado • Televisión • Vídeo casetera • Proyector de acetatos • Pizarrón • Computadora • Embarcación

50
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M) RECURSOS MATERIALES
2.4. Mantenimiento preventivo y correctivo menor
2.4.1. Cambio de aceite y filtros 2.4.2. Cambio de bandas y
mangueras 2.4.3. Revisión de niveles (aceite,
agua y anticongelante)
(T = 6 horas)
(M) Demostrar el cambio de aceite y filtros. (A) Aplicar el cambio de aceite y filtros. (M) Demostrar y aplicar el cambio de bandas y mangueras. (A) Explicar la revisión de los niveles de aceite. (M) Demostrar la revisión de los niveles de aceite. (A) Explicar la revisión de los niveles de agua. (M) Demostrar la revisión de los niveles de agua. (A) Explicar y demostrar la revisión de los niveles de anticongelante.
• Kit de herramientas • Aceite • Anticongelante • Filtros de aceite • Filtros de combustible • Filtro para agua • Bandas • Mangueras corrugadas

51
MÓDULO II Operación de embarcaciones con motores estacionarios. 272 horas
SUBMÓDULO III Operación de equipo de navegación y comunicación. 68 horas
ELEMENTOS DE EVALUACIÓN Cuestionarios; Guías de observación; Listas de cotejo; Reportes de Investigación.
RESULTADOS DE APRENDIZAJE Operar los equipos de navegación y comunicación
GUÍA DIDÁCTICA
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M)
RECURSOS MATERIALES
3. Equipo de navegación y comunicación
3.1 Sistema de posicionamiento
global (G.P.S.) 3.1.1. Funcionamiento del G.P.S 3.1.2. Manual de operación del
G.P.S.
(T = 17 horas)
(M) Explicar el funcionamiento del sistema de posicionamiento global G.P.S. (M) Operar el funcionamiento del sistema de posicionamiento global G.P.S. (A) Demostrar el funcionamiento del sistema de posicionamiento global G.P.S.
• G.P.S. fijo marca FURUNO 1500• G.P.S. portátil marca Magallan o
Gilligan 500 • Manuales de operación del
G.P.S. fijo • Manuales de operación del
G.P.S. portátil • Rota folio • Pizarrón • Proyectores de acetatos • Marcadores • Borrador • Líquido para pizarrón blanco

52
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M)
RECURSOS MATERIALES
3.2. Video Sonda 3.2.1. Funcionamiento de la vídeo
sonda 3.2.2. Manual de operación de la
vídeo sonda
(T = 17 horas)
3.3. Radar 3.3.1. Funcionamiento del Radar 3.3.2 Manual de operación del
Radar (T = 17 horas)
(M) Explicar el funcionamiento de la vídeo sonda. (M) Operar el funcionamiento de la vídeo sonda. (A) Demostrar el funcionamiento de la vídeo sonda. (M) Explicar el funcionamiento del radar. (M) Operar el funcionamiento del radar. (A) Demostrar el funcionamiento del radar.
• Video sonda FURUNO • Manuales de operación de la
video sonda • Rota folio • Pizarrón • Proyectores de acetatos • Marcadores • Borrador • Radar FURUNO • Manuales de operación del radar • Rota folio • Pizarrón • Proyectores de acetatos • Marcadores • Borrador • Líquido para pizarrón blanco
53
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M)
RECURSOS MATERIALES
3.4. Radio V.H.F. Marino 3.4.1. Funcionamiento del Radio
V.H.F marino 3.4.2. Manual de operación del
Radio V.H.F. Marino
(T = 9 horas)
(M) Explicar el funcionamiento del radio V.H.F marino. (M) Operar el funcionamiento del radio V.H.F. marino. (A) Demostrar el funcionamiento del radio V.H.F marino.
• Radio V.H.F Marino marca YASU de 156 - 180 Mhz.
• Manuales de operación del radio V.H.F. marino
• Rota folio • Pizarrón • Proyectores de acetatos • Marcadores • Borrador • Líquido para pizarrón blanco
3.5. Radio H.F. 3.5.1. Funcionamiento del Radio
H.F. 3.5.2 Manual de operación del
Radio HF
(T = 8 horas)
(M) Explicar el funcionamiento del radio H.F. (M) Operar el funcionamiento del radio H.F (A) Demostrar el funcionamiento del radio H.F.
• Radio H.F. marca YASU o FURUNO de 2–30 Mhz
• Manuales de operación del radio H.F.
• Rota folio • Pizarrón • Proyectores de acetatos

54
MÓDULO II Operación de embarcaciones con motores estacionarios. 272 horas
SUBMÓDULO IV Navegación en embarcaciones que operan con motor estacionario. 121 horas
ELEMENTOS DE EVALUACIÓN Cuestionarios; Guías de observación; Listas de cotejo; Reportes de Investigación.
RESULTADOS DE APRENDIZAJE Navegar en embarcaciones con motores estacionarios
GUÍA DIDÁCTICA
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M) RECURSOS MATERIALES
4. Navegación con embarcaciones para pesca deportiva y recreativa
4.1. Esfera terrestre 4.1.1. Definición de: ejes, polos,
ecuador, paralelos, meridianos, latitud y longitud
(T = 4 horas)
(M) Explicar el término de ejes terrestres. (A) Definir el término de ejes. (M) Explicar la definición de polos. (A) Definir el concepto de polos. (M) Explicar la definición de ecuador. (A) Definir el concepto de ecuador. (M) Explicar la definición de paralelos.
(A) Definir el concepto de paralelos. (B)
• Globo terráqueo • Pizarrón • Proyectores de acetatos • Planisferio • Cabos de poliamida de 1-2
pulgadas de diámetro

55
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M) RECURSOS MATERIALES
(M) Explicar la definición de meridianos. (A) Definir el concepto de meridianos. (M) Explicar la definición de latitud. (A) Definir el concepto de latitud. (M) Explicar la definición de longitud. (A) Definir el concepto de longitud.
•
4.2. Compás magnético 4.2.1. Uso del compás
magnético 4.2.2. Desvío del compás
magnético
(T = 4 horas 4.3 Husos horarios 4.3.1 Tiempo universal
(M) Describir el funcionamiento del compás magnético. (A) Demostrar el funcionamiento del compás magnético. (M) Ilustrar la división de los rumbos en el compás magnético. (A) Localizar rumbos en el compás magnético. (M) Explicar el procedimiento para saber los grados de desvío del compás magnético. (A) Determinar los grados de desvío del compás magnético. (M) Explicar el término de tiempo universal de acuerdo al meridiano de Greenwich.
• Globo terráqueo • Compás magnético • Escuadras • Paralelas • Compás de punta • Pizarrón • Proyector de acetatos • Globo terráqueo • Escuadras y paralelas • Pizarrón y rotafolio • Proyectores de acetatos • Planisferio • Cartas de navegación

56
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M) RECURSOS MATERIALES
4.3.2 Hora local
(T = 3 horas)
(A) Demostrar el cálculo del tiempo universal de un punto geográfico.
4.4. Cartas de navegación 4.4.1. Tipos de cartas de
navegación. 4.4.2. Rumbos y distancia entre
dos puntos
(T = 30 horas)
(M) Describir los diferentes tipos de cartas de navegación. (A) Identificar los diferentes tipos de cartas de navegación. (A) Diferenciar los diferentes tipos de cartas de navegación. (M) Explicar los conceptos de los tipos de rumbos. (A) Enunciar los diferentes tipos de rumbos. (M) Demostrar la determinación de los diferentes tipos de rumbos. (A) Calcular los diferentes tipos de rumbos.
• Globo terráqueo • Escuadras • Paralelas • Compás de punta • Pizarrón • Bancos para mesa de • cartas de navegación • Proyectores de acetatos • Mesas de cartas de • Navegación • Cartas de navegación • Rota folio
4.5 Navegación 4.5.1 Costera
(T = 50 horas)
(M) Demostrar la navegación costera a bordo de embarcaciones con motores estacionarios (A) Realizar la navegación costera a bordo de embarcaciones con motores estacionarios
• Compás magnético • Escuadras • Paralelas • Compás de punta • Embarcación deportiva de 8 mts
de eslora con motor estacionario • Cabos de poliamida de 1-2
pulgadas de diámetro • Ancla tipo danforth

57
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M) RECURSOS MATERIALES
• Diesel • Agua
4.6 Maniobras de atraque y desatraque en muelles
4.6.1 Con viento de tierra 4.6.2 Con viento de mar. 4.6.3 Con corriente
(M) Describir las maniobras de atraque con viento de tierra. (A) Interpretar las maniobras de atraque con viento de tierra. (M) Describir las maniobras de desatraque con viento de tierra. (A) Interpretar las maniobras de desatraque con viento de tierra. (M) Describir las maniobras de atraque con viento de mar. (A) Interpretar las maniobras de atraque con viento de mar. (M) Describir las maniobras de desatraque con viento de mar. A) Interpretar las maniobras de desatraque con viento de mar.
• Compás magnético • Embarcación deportiva con motor
estacionario de 8 metros de eslora
• Cabos de poliamida de 1-2 pulgadas de diámetro
• Anclas tipo danforth
4.6.4 Con viento y corriente
(T = 15 horas)
(M) Describir las maniobras de atraque con corriente. (A) Interpretar las maniobras de atraque con corriente. (M) Describir las maniobras de desatraque con corriente. (A) Interpretar las maniobras de desatraque con corriente.
• Cabos de poliamida de 1-2 pulgadas de diámetro
• Rota folio •

58
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M) RECURSOS MATERIALES
(M) Describir las maniobras de atraque con viento y corriente. (A) Interpretar las maniobras de atraque con viento y corriente. (M) Describir las maniobras de desatraque con viento y corriente. (A) Interpretar las maniobras de desatraque con viento y corriente. (M) Realizar las maniobras de atraque con viento de tierra a bordo de embarcaciones con motores estacionarios. (A) Demostrar las maniobras de atraque con viento de tierra a bordo de embarcaciones con motores estacionarios. (M) Realizar las maniobras de desatraque con viento de tierra a bordo de embarcaciones con motores estacionarios. (A) Demostrar las maniobras de desatraque con viento de tierra a bordo de embarcaciones con motores estacionarios. (M) Efectuar las maniobras de atraque con viento de mar a bordo de embarcaciones con motores estacionarios. (A) Demostrar las maniobras de atraque con viento de mar a bordo de embarcaciones con motores estacionarios.

59
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M) RECURSOS MATERIALES
(M) Efectuar las maniobras de desatraque con viento de mar a bordo de embarcaciones con motores estacionarios. (A) Demostrar las maniobras de desatraque con viento de mar a bordo de embarcaciones con motores estacionarios. (M) Realizar las maniobras de atraque con corriente a bordo de embarcaciones con motores estacionarios. (A) Demostrar las maniobras de atraque con corriente a bordo de embarcaciones con motores estacionarios. (M) Realizar las maniobras de desatraque con corriente a bordo de embarcaciones con motores estacionarios. (A) Demostrar las maniobras de desatraque con corriente a bordo de embarcaciones con motores estacionarios. (M) Efectuar las maniobras de atraque con viento y corriente a bordo de embarcaciones con motores estacionarios. (A).Demostrar las maniobras de atraque con viento y corriente a bordo de embarcaciones con motores estacionarios.

60
CONTENIDOS ACTIVIDADES DE LOS ALUMNOS (A) INTERVENCIÓN DEL MAESTRO (M) RECURSOS MATERIALES
4.7. Maniobras de remolque 4.7.1. Con buen tiempo 4.7.2. Con mal tiempo
(T = 15 horas)
(M) Explicar los procesos de maniobras de remolque en el mar con buen tiempo. (A) Describir los procesos de maniobras de remolque en el mar con buen tiempo. (M) Aplicar los procesos de maniobras de remolque en el mar con buen tiempo a bordo de embarcaciones con motor estacionario. (A) Demostrar los procesos de maniobras de remolque en el mar con buen tiempo a bordo de embarcaciones con motor estacionario. (M) Explicar los procesos de maniobras de remolque en el mar con mal tiempo. (A) Describir los procesos de maniobras de remolque en el mar con mal tiempo. (M) Aplicar los procesos de maniobras de remolque en el mar con mal tiempo a bordo de embarcaciones con motor estacionario. (A) Demostrar los procesos de maniobras de remolque en el mar con mal tiempo a bordo de embarcaciones con motor estacionario.
• Cabos de poliamida de 1-2 pulgadas de diámetro
• Diesel • Agua • Cabos de poliamida de 1-2
pulgadas de diámetro • Rota folio

61
CARRERA DE TÉCNICO EN PESCA DEPORTIVA Y BUCEO
CLAVE: BTMPEP04
INSTRUMENTOS DE EVALUACIÓN
MÓDULO II Operación de embarcaciones con motor estacionario
CLAVE: PPE317
Agosto de 2005

62
SUBMÓDULO I
Nomenclatura náutica y tecnología naval en embarcaciones con motores estacionarios

63
PLANTEL: GRUPO: NOMBRE DEL ESTUDIANTE(A): NOMBRE(S) DEL PROFESOR(ES): FECHA DE APLICACIÓN: CALIFICACIÓN:
SUBMÓDULO I. NOMENCLATURA NÁUTICA Y TECNOLOGÍA NAVAL EN EMBARCACIONES CON MOTORES ESTACIONARIOS 1. Instrumentos de medición
Guía de observación
Objetivo Este instrumento está orientado a la recopilación de evidencias por desempeño de la nomenclatura náutica y tecnología naval en embarcaciones con motores estacionarios. Descripción del instrumento El presente instrumento es una Guía de Observación, su contenido refiere un conjunto de acciones que sólo es posible evaluar observando en forma directa el desempeño del estudiante. Condiciones de aplicación La aplicación de esta guía de observación deberá realizarse cuando el candidato identifique los componentes generales, dimensiones y de seguridad en una embarcación con motor estacionario. Es importante verificar que en la situación de evaluación se cuente con el siguiente material: modelos didácticos a escala de embarcaciones con motores estacionarios, cabos, cadena, grilletes, anclas, boyas, extinguidores (extintores), banderas (códigos).

64
CUMPLE REACTIVOS SI NO OBSERVACIONES
Verificación de la nomenclatura náutica
1.- Identifica la eslora de una embarcación.
2.- Señala la manga de una embarcación.
3.- Identifica el puntal de una embarcación.
4.- Señala el franco bordo de una embarcación.
5.- Identifica el calado de una embarcación.
6.- Identifica el asiento o trimado de una embarcación.
7.- Señala las amuras de una embarcación.
8.- Identifica las aletas de una embarcación.
9.- Señala la cubierta de una embarcación.
10.- Identifica la obra viva de una embarcación.

65
CUMPLE REACTIVOS SI NO OBSERVACIONES
Verificación de la nomenclatura náutica
11.- Identifica la obra muerta de una embarcación.
12.- Identifica el casco de una embarcación.
13.- Identifica la serviola de una embarcación.
14.- Identifica la bita de una embarcación.
15.- Identifica las gateras de una embarcación.
16.- Identifica la parte de babor de una embarcación.
17.- Identifica la parte de estribor de una embarcación.
18.- Identifica la proa de una embarcación.
19.- Identifica la popa de una embarcación.
20.- Identifica cornamusa de una embarcación.

66
CUMPLE REACTIVOS SI NO OBSERVACIONES
Verificación de la nomenclatura náutica
21.- Identifica la quilla de una embarcación.
22.- Identifica la borda de una embarcación.
23.- Identifica la rueda del timón de una embarcación.
24.- Elabora el nudo as de guía sencillo.
25.- Elabora el nudo as de guía doble.
26.- Elabora el nudo as de guía por seno.
27.- Elabora el nudo vuelta de escota sencillo.
28.- Elabora el nudo vuelta de escota y medio.
29.- Elabora el nudo vuelta de escota doble.
30.- Elabora el nudo llano.

67
CUMPLE REACTIVOS SI NO OBSERVACIONES
Verificación de la nomenclatura náutica
31.- Elabora el nudo de ballestrinque sencillo.
32.- Elabora el nudo de ballestrinque doble.
33.- Elabora el nudo del pescador.
34.- Elabora el nudo de ajuste.
Verificación del equipo de contra incendio
1.- Emplea el extintor adecuado para apagar un incendio tipo Alfa.
2.- Emplea el extintor adecuado para apagar un incendio tipo Bravo.
3.- Emplea el extintor adecuado para apagar un incendio tipo Charlie.
4.- Emplea el extintor adecuado para apagar un incendio tipo Delta.
Interpretación de los versos del Cap. Thomas Gray
1.- Determina las maniobras a efectuar en el verso Nº 1.
2.- Determina las maniobras a efectuar en el verso Nº 2.
68
CUMPLE REACTIVOS SI NO OBSERVACIONES
Interpretación de los versos del Cap. Thomas Gray
3.- Determina las maniobras a efectuar en el verso Nº 3.
4.- Determina las maniobras a efectuar en el verso Nº 4.
5.- Determina las maniobras a efectuar en el verso Nº 5.
Interpretación del código internacional de banderas
1.- Identifica las banderas más usuales en pesca deportiva y buceo.
Interpretación de los elementos de balizamiento
2.- Señala los elementos de balizamiento usados en el sector marítimo.
Interpretación de los señalamientos con boyas
3.- Identifica las boyas de señalamiento más comunes.

69
PLANTEL: GRUPO: NOMBRE DEL ESTUDIANTE(A): NOMBRE(S) DEL PROFESOR(ES): FECHA DE APLICACIÓN: CALIFICACIÓN:
SUBMÓDULO I. NOMENCLATURA NÁUTICA Y TECNOLOGÍA NAVAL EN EMBARCACIONES CON MOTORES ESTACIONARIOS
Cuestionario Objetivo El instrumento está orientado a obtener evidencias de conocimiento de los componentes generales, dimensiones y de seguridad en una embarcación con motor estacionario. Descripción del instrumento El presente instrumento es un Cuestionario de respuesta abierta. Las preguntas incluidas investigan el sustento conceptual del candidato para la ejecución de algunos desempeños relacionados con los instrumentos de medición empleados en la en la nomenclatura náutica y tecnología naval en embarcaciones con motor estacionario. Condiciones de aplicación Su aplicación debe realizarse en un espacio donde el estudiante disponga de privacidad, y no enfrente ninguna distracción. El profesor deberá ofrecer al estudiante su apoyo para la aclaración de cualquier duda relativa a las instrucciones y redacción de las preguntas. Para su respuesta no podrá consultar ningún documento. Para su calificación el instrumento incluye las opciones de cumple y no cumple; el profesor deberá colocar una x en la opción que mejor califique su respuesta.

70
Cuestionario
1.- Menciona a que se le llama desplazamiento.
CUMPLE NO CUMPLE 2.- Defina el termino Arqueo:
CUMPLE NO CUMPLE 3.- Explica el termino de estabilidad de una embarcación:
CUMPLE NO CUMPLE 4.- ¿A que se le llama flotabilidad en una embarcación?
CUMPLE NO CUMPLE 5.- Enlista el nombre de los puntos de equilibrio en una embarcación.
CUMPLE NO CUMPLE

71
6.- Explique en que circunstancias una embarcación sufre escoramiento.
CUMPLE NO CUMPLE 7.- Definición de Asiento o trimado en una embarcación.
CUMPLE NO CUMPLE

72
PLANTEL: GRUPO: NOMBRE DEL ESTUDIANTE(A): NOMBRE(S) DEL PROFESOR(ES): FECHA DE APLICACIÓN: CALIFICACIÓN:
SUBMÓDULO II. ASPECTOS BÁSICOS DEL FUNCIONAMIENTO DE LOS MOTORES ESTACIONARIOS
Guía de observación Objetivo Este instrumento está orientado a la recopilación de evidencias por desempeño de los principios del funcionamiento de los motores estacionarios. Descripción del instrumento El presente instrumento es una Guía de Observación, su contenido refiere un conjunto de acciones que sólo es posible evaluar observando en forma directa el desempeño del estudiante. Condiciones de aplicación La aplicación de esta guía de observación deberá realizarse cuando el candidato realice las etapas del principio del funcionamiento, sistemas y mantenimiento preventivo y correctivo menor de los motores estacionarios. Es importante verificar que en la situación de evaluación se cuente con el siguiente material: Manual de operación del motor estacionario, kit de herramientas, lubricantes y refacciones

73
CUMPLE REACTIVOS SI NO OBSERVACIONES
Componentes de los motores estacionarios
4.- Identifica el turbo alimentador.
5.- Señala la ubicación de los inyectores.
6.- Localiza la bomba de inyección.
7.- Ubica el múltiple de escape.
8.- Diferencia los filtros de aceite, agua y combustible.
9.- Identifica el escape.
10.- Localiza el generador.
Sistemas de los motores estacionarios 1.- Muestra las partes que componen el sistema de combustible.
2.- Identifica las partes que componen el sistema de encendido.
3.- Muestra las partes componentes del sistema de lubricación.
4.- Identifica las partes componentes del sistema de enfriamiento.
5.- Muestra las partes componentes del sistema de transmisión.

74
PLANTEL: GRUPO: NOMBRE DEL ESTUDIANTE(A): NOMBRE(S) DEL PROFESOR(ES): FECHA DE APLICACIÓN: CALIFICACIÓN:
SUBMÓDULO II. ASPECTOS BÁSICOS DEL FUNCIONAMIENTO DE LOS MOTORES ESTACIONARIOS
Lista de cotejo Objetivo Este instrumento está orientado a la recopilación de evidencias del mantenimiento preventivo y correctivo menor de motores estacionarios Descripción del instrumento El presente instrumento es una Lista de Cotejo, su contenido refiere a los reportes del motor estacionario ubicado en la embarcación que debe cumplir un producto generado previamente por el estudiante. Condiciones de aplicación La aplicación del instrumento requiere que el estudiante entregue al profesor un reporte de las actividades realizadas en la etapa del mantenimiento preventivo y correctivo menor de los motores estacionarios, ubicados en la embarcación. La evidencia se considerará insuficiente si el estudiante no proporciona el formato Anexo 2, para presentar esta evidencia.

75
CUMPLE REACTIVOS SI NO NA OBSERVACIONES
Mantenimiento preventivo y correctivo menor 1.- Las condiciones de seguridad e higiene son las adecuadas para realizar las actividades.
2.- Utiliza las herramientas adecuadas para efectuar el mantenimiento.
3.- Utiliza adecuadamente las herramientas para el proceso de mantenimiento.
4.- Realiza adecuadamente el cambio de aceite y filtros.
5.- Efectúa correctamente el cambio de bandas.
6.- Efectúa correctamente el cambio de mangueras.
7.- Realiza la revisión de niveles de aceite.
8.- Realiza la revisión de niveles de agua y anticongelantes.

76
PLANTEL: GRUPO: NOMBRE DEL ESTUDIANTE(A): NOMBRE(S) DEL PROFESOR(ES): FECHA DE APLICACIÓN: CALIFICACIÓN:
SUBMÓDULO II. ASPECTOS BÁSICOS DEL FUNCIONAMIENTO DE LOS MOTORES ESTACIONARIOS
Cuestionario Objetivo El instrumento está orientado a obtener evidencias de conocimiento a cerca de las marcas principales y potencias de los motores estacionarios. Descripción del instrumento El presente instrumento es un Cuestionario de respuesta abierta. Las preguntas incluidas investigan el sustento conceptual del candidato para la ejecución de algunos desempeños relacionados con las marcas principales, potencias y componentes de los motores estacionarios. Condiciones de aplicación Su aplicación debe realizarse en un espacio donde el estudiante disponga de privacidad, y no enfrente ninguna distracción. El profesor deberá ofrecer al estudiante su apoyo para la aclaración de cualquier duda relativa a las instrucciones y redacción de las preguntas. Para su respuesta no podrá consultar ningún documento. Para su calificación el instrumento incluye las opciones de cumple y no cumple; el profesor deberá colocar una x en la opción que mejor califique su respuesta.
77
Cuestionario
1.- Enliste el nombre de las principales marcas de los motores estacionarios.
CUMPLE NO CUMPLE 2.- Escriba los valores de potencias que presentan los diferentes motores estacionarios.
CUMPLE NO CUMPLE 3.- Explica el funcionamiento del sistema de combustible.
CUMPLE NO CUMPLE 4.- Describa el sistema de encendido.
CUMPLE NO CUMPLE 5.- Mencione como se lleva acabo la lubricación de los motores estacionarios.
CUMPLE NO CUMPLE

78
6.- Describe el proceso del sistema de enfriamiento de un motor estacionario.
CUMPLE NO CUMPLE 7.- Describa el sistema de transmisión de un motor estacionario.
CUMPLE NO CUMPLE

79
PLANTEL: GRUPO: NOMBRE DEL ESTUDIANTE(A): NOMBRE(S) DEL PROFESOR(ES): FECHA DE APLICACIÓN: CALIFICACIÓN:
SUBMÓDULO III. OPERACIÓN DE EQUIPO DE NAVEGACIÓN Y COMUNICACIÓN
Cuestionario Objetivo El instrumento está orientado a obtener evidencias de conocimiento en el funcionamiento y operación de los equipos de navegación y comunicación. Descripción del instrumento El presente instrumento es un Cuestionario de respuesta abierta. Las preguntas incluidas investigan el sustento conceptual del candidato para la ejecución de algunos desempeños relacionados con la operación de los equipos de navegación y comunicación. Condiciones de aplicación Su aplicación debe realizarse en un espacio donde el estudiante disponga de privacidad, y no enfrente ninguna distracción. El profesor deberá ofrecer al estudiante su apoyo para la aclaración de cualquier duda relativa a las instrucciones y redacción de las preguntas. Para su respuesta no podrá consultar ningún documento. Para su calificación el instrumento incluye las opciones de cumple y no cumple; el profesor deberá colocar una x en la opción que mejor califique su respuesta.

80
Cuestionario 1.- Explica el funcionamiento de los G.P.S.
CUMPLE NO CUMPLE 2.- Explica el funcionamiento del video sonda.
CUMPLE NO CUMPLE 3.- Explica el funcionamiento del radar.
CUMPLE NO CUMPLE 4.- Explica el funcionamiento del radio V.H.F. MARINO.
CUMPLE NO CUMPLE 5.- Explica el funcionamiento del radio H.F.
CUMPLE NO CUMPLE

81
PLANTEL: GRUPO: NOMBRE DEL ESTUDIANTE(A): NOMBRE(S) DEL PROFESOR(ES): FECHA DE APLICACIÓN: CALIFICACIÓN:
SUBMÓDULO III. OPERACIÓN DE EQUIPO DE NAVEGACIÓN Y COMUNICACIÓN
Lista de cotejo Objetivo Este instrumento está orientado a la recopilación de evidencias del funcionamiento y operación de equipo de navegación y comunicación. Descripción del instrumento El presente instrumento es una Lista de Cotejo, su contenido refiere a los reportes de la operación de los equipos de navegación y comunicación que debe cumplir un producto generado previamente por el estudiante. Condiciones de aplicación La aplicación del instrumento requiere que el estudiante entregue al profesor un reporte de las actividades realizadas durante la operación de los equipos de navegación y comunicación. La evidencia se considerará insuficiente si el estudiante no proporciona el formato Anexo 3, para presentar esta evidencia.

82
CUMPLE REACTIVOS SI NO NA OBSERVACIONES
Sistema de posicionamiento global G.P.S.
1.- Utiliza los botones adecuados para el encendido y apagado.
2.- Aplica los botones adecuados para grabar coordenadas.
3.- Presiona los botones adecuados para acceder a la memoria de archivos.
4.- Utiliza el botón de ZOOM IN adecuadamente.
5.- Utiliza el botón ZOOM OUT adecuadamente.
6.- Utiliza el botón adecuado para grabar una posición o punto geográfico.
7.- Aplica el botón adecuado para grabar un punto durante la travesía.
8.- Emplea el botón adecuado para marcar.
9.- Presiona el botón correcto para acceder a la rosa de los vientos.
Video sonda
1.- Utiliza los botones adecuados para el encendido y apagado.
2.- Aplica adecuadamente el botón de MODE.

83
CUMPLE REACTIVOS SI NO NA OBSERVACIONES
Video sonda
3.- Presiona el botón correcto para seleccionar la escala.
4.- Utiliza el botón adecuado para acceder a otras funciones.
5.- Utiliza el botón correcto para acceder a la ganancia.
6.- Utiliza el botón adecuado para fijar la alarma.
7.- Interpreta adecuadamente la lectura de la pantalla.
Radar
1.- Utiliza los botones adecuados para el encendido y apagado.
2.- Aplica adecuadamente el botón de espera.
3.- Presiona el botón adecuado para seleccionar el rango de escala.
4.- Utiliza el botó correcto para el control de ganancia.
5.- Utiliza el botón correcto para el control de anillo de distancia.
6.- Utiliza el botón adecuado parra calibrar la rosa de los vientos.
7.- Presiona el botón adecuado para instalar el sistema de alarma.

84
CUMPLE REACTIVOS SI NO NA OBSERVACIONES
Radar
8.- Utiliza el botón adecuado del medidor de rango variable.
Radio V.H.F.
1.- Utiliza los botones adecuados para el encendido y apagado.
2.- Aplica adecuadamente el botón seleccionador de canales.
3.- Presiona el botón correcto para intercomunicarse.
4.- Utiliza el canal adecuado para escuchar los boletines del tiempo.
5.- Utiliza el canal correcto para solicitar auxilio.
Radio H.F.
1.- Utiliza los botones adecuados para el encendido y apagado.
2.- Aplica adecuadamente el botón seleccionador de canales.
3.- Presiona el botón correcto para intercomunicarse.
4.- Utiliza el canal adecuado para escuchar los boletines del tiempo.
5.- Utiliza el canal correcto para solicitar auxilio.

85
PLANTEL: GRUPO: NOMBRE DEL ESTUDIANTE(A): NOMBRE(S) DEL PROFESOR(ES): FECHA DE APLICACIÓN: CALIFICACIÓN:
SUBMÓDULO IV. NAVEGACIÓN EN EMBARCACIONES QUE OPERAN CON MOTORES ESTACIONARIOS
Cuestionario Objetivo El instrumento está orientado a obtener evidencias de conocimiento en la navegación de embarcaciones que operan con motor estacionario. Descripción del instrumento El presente instrumento es un Cuestionario de respuesta abierta. Las preguntas incluidas investigan el sustento conceptual del candidato para la ejecución de algunos desempeños relacionados con la navegación en embarcaciones que operan con motores estacionarios. Condiciones de aplicación Su aplicación debe realizarse en un espacio donde el estudiante disponga de privacidad, y no enfrente ninguna distracción. El profesor deberá ofrecer al estudiante su apoyo para la aclaración de cualquier duda relativa a las instrucciones y redacción de las preguntas. Para su respuesta no podrá consultar ningún documento. Para su calificación el instrumento incluye las opciones de cumple y no cumple; el profesor deberá colocar una x en la opción que mejor califique su respuesta.

86
Cuestionario 1.- Escriba el nombre de los principales ejes terrestres.
CUMPLE NO CUMPLE 2.- Escriba la definición de polos.
CUMPLE NO CUMPLE 3.- Explique el término ecuador.
CUMPLE NO CUMPLE 4.- Explique la diferencia entre paralelos y meridianos.
CUMPLE NO CUMPLE 5.- Escriba la definición de latitud.
CUMPLE NO CUMPLE

87
6.- Escriba el concepto de longitud.
CUMPLE NO CUMPLE 7.- Escriba la definición de latitud.
CUMPLE NO CUMPLE 8.- Explica el término de tiempo universal de acuerdo al meridiano de Greenwich.
CUMPLE NO CUMPLE 9.- Explique que es una carta de navegación.
CUMPLE NO CUMPLE 10.- Enliste el nombre de las diferentes cartas de navegación.
CUMPLE NO CUMPLE

88
11.- Definición de rumbo.
CUMPLE NO CUMPLE 12.- Escriba los nombres de los diferentes tipos de rumbos en la navegación.
CUMPLE NO CUMPLE 13.- Ilustra los procesos de maniobra de atraque con viento y corriente.
CUMPLE NO CUMPLE 14.- Redacta los procesos de maniobras de remolque con mal tiempo.
CUMPLE NO CUMPLE

89
PLANTEL: GRUPO: NOMBRE DEL ESTUDIANTE(A): NOMBRE(S) DEL PROFESOR(ES): FECHA DE APLICACIÓN: CALIFICACIÓN:
SUBMÓDULO IV. NAVEGACIÓN EN EMBARCACIONES QUE OPERAN CON MOTORES ESTACIONARIOS
Guía de observación Objetivo Este instrumento está orientado a la recopilación de evidencias por desempeño de la navegación en embarcaciones que operan con motor estacionario Descripción del instrumento El presente instrumento es una Guía de Observación, su contenido refiere un conjunto de acciones que sólo es posible evaluar observando en forma directa el desempeño del estudiante. Condiciones de aplicación La aplicación de esta guía de observación deberá realizarse cuando el candidato realice las etapas de navegación en embarcaciones con motores estacionarios. Es importante verificar que en la situación de evaluación se cuente con el siguiente material: Planisferio, globo terráqueo, compás magnético, cartas de navegación, escuadras, paralelas, compás de punta y embarcación para pesca deportiva.

90
CUMPLE REACTIVOS SI NO OBSERVACIONES
Compás magnético
1.- Señala los rumbos obtenidos en la primera división.
2.- Señala los rumbos obtenidos en la segunda división.
3.- Señala los rumbos obtenidos en la tercera división.
4.- Señala los rumbos obtenidos en la cuarta y última división.
Cartas de navegación
1.- Calcula adecuadamente los rumbos.
2.- Aplica correctamente el uso de las paralelas.
3.- Emplea adecuadamente el compás de punta.
4.- Traza correctamente los rumbos.
Navegación
1.- Efectúa la navegación costera.
2.- Gobierna la embarcación adecuadamente.

91
CUMPLE REACTIVOS SI NO OBSERVACIONES
Navegación
1.- Desatraca la embarcación correctamente.
2.- Atraca la embarcación adecuadamente.
3.- Aplica la longitud de cabo correcta para efectuar maniobras de remolque a otra embarcación.

92
PLANTEL: GRUPO: NOMBRE DEL ESTUDIANTE(A): NOMBRE(S) DEL PROFESOR(ES): FECHA DE APLICACIÓN: CALIFICACIÓN:
SUBMÓDULO IV. NAVEGACIÓN EN EMBARCACIONES QUE OPERAN CON MOTORES ESTACIONARIOS
Lista de cotejo Objetivo Este instrumento está orientado a la recopilación de evidencias de la navegación en embarcaciones que operan con motores estacionarios. Descripción del instrumento El presente instrumento es una Lista de Cotejo, su contenido refiere a los reportes de la navegación en embarcaciones que operan con motores estacionarios siendo un producto generado previamente por el estudiante. Condiciones de aplicación La aplicación del instrumento requiere que el estudiante entregue al profesor un reporte de las actividades realizadas durante la navegación en embarcaciones que operan con motores estacionarios. La evidencia se considerará insuficiente si el estudiante no proporciona el formato Anexo 3, para presentar esta evidencia.
CUMPLE REACTIVOS SI NO NA
OBSERVACIONES
Navegación
1.- Efectúa correctamente el cálculo de los rumbos.
2.- Utiliza adecuadamente las cartas de navegación.
3.- Traza correctamente el rumbo a seguir.

93
CARRERA DE TÉCNICO EN PESCA DEPORTIVA Y BUCEO
CLAVE: BTMPEP04
GUÍA DE APRENDIZAJE
MÓDULO II Operación de embarcaciones con motor estacionario
CLAVE: PPE317
Agosto de 2005

94
Reforma Curricular del Bachillerato Tecnológico (Acuerdo 345)
Componente de formación profesional
MÓDULO II Operación de embarcaciones con motor estacionario
CLAVE: PPE317
Profesores que elaboraron la estructura y el programa de estudio del módulo II: Arturo Arzola Ayala, Raúl Salazar Miranda y Oscar Covarrubias Salazar. Coordinadores de la DGECyTM: M. en C. Gildardo Rojo Salazar Ocean. Víctor Manuel Rojas Reynosa Q. B. P. Francisco Escamilla Rodríguez Biól. Rodrigo Nava Mora Edición: M. en C. Itzia Calixto Albarrán M. en C. Jessica Noemi Montaño Vargas Primera edición: 2005. Subsecretaría de Educación Media Superior, SEP. Dirección General de Educación en Ciencia y Tecnología del Mar. Dirección Técnica. ISBN: (En trámite)

95
DIRECTORIO
Dr. Reyes S. Tamez Guerra Secretario de Educación Pública Dra. Yoloxóchitl Bustamante Díez Subsecretaría de Educación Media Superior M. en C. Daffny Rosado Moreno Secretario Ejecutivo del CoSNET Biól. Francisco Brizuela Venegas Director General de Educación en Ciencia y Tecnología del Mar M. en C. Gildardo Rojo Salazar Director Técnico de la DGECyTM Ing. Heriberto Nolasco Heredia Director de Operación de la DGECyTM C.P. María Elena Colorado Álvarez Coordinadora Administrativa de la DGECyTM Ocean. Víctor Manuel Rojas Reynosa Jefe del Departamento de Control Escolar de la DGECyTM Q.B.P. Francisco Escamilla Rodríguez Jefe del Departamento de Planes y Programas de Estudio de la DGECyTM

96
ÍNDICE PÁG Objetivo 98 Introducción 98 Submódulo I. Nomenclatura náutica y tecnología naval en embarcaciones con motores estacionarios
99
1.- Dimensiones de una embarcación con motor estacionario 99 1.1.- Conceptos generales 99 1.1.1 Eslora, manga, puntal, francobordo, calado, asiento, desplazamiento y arqueo 99 1.1.2 Componentes del casco y cubierta 101 1.1.3 Elementos de amarre y fondeo 106 1.2 Estabilidad y flotabilidad 108 1.3. Equipo de seguridad 115 1.3.1 Contra incendio (clasificación de incendios y equipo) 115 1.3.2 Versos del Capitán Thomas Grey 119 1.3.3 Código internacional de banderas 120 1.3.4 Balizas y boyas 124 Submódulo II. Aspectos básicos del funcionamiento de los motores estacionarios 127 2. Funcionamiento de los motores estacionarios 127 2.1 Marcas principales y potencia de los motores estacionarios 127 2.1.1 Caterpillar 127 2.1.2 Cummins 127 2.1.3 General motors 127 2.1.4 Perkins 127 2.2 Componentes de los motores estacionarios 127 2.2.1 Turbo alimentador 127 2.2.2 Inyectores 127 2.2.3 Bomba de inyección 128 2.2.4 Múltiple de escape 129 2.2.5 Filtro primario tipo decantador 129 2.2.6 Escape 130 2.2.7 Generador 130 2.3 Sistemas de los motores estacionarios 130 2.3.1 Sistema de combustible 130 2.3.2 Sistema de encendido 131 2.3.3 Sistema de lubricación 131 2.3.4 Sistema de enfriamiento 132 2.3.5 Sistema de transmisión 132 2.4 Mantenimiento preventivo y correctivo menor 2.4.1 Cambio de aceite y filtros 2.4.2 Cambio de bandas y mangueras 2.4.3 Revisión de niveles (aceite, agua y anticongelante) Submódulo III. Operación de equipo de navegación y comunicación

97
3. Equipo de navegación y comunicación 133 3.1 Sistema de posicionamiento global (G.P.S.). 133 3.1.1 Funcionamiento del G.P.S. 133 3.1.2 Manual de operación del G.P.S. 140 3.2 Video Sonda 142 3.2.1 Funcionamiento de la Video Sonda 142 3.2.2 Manual de operación de la Video Sonda 142 3.3 Radar 142 3.3.1 Funcionamiento del Radar 142 3.3.2 Manual de operación del Radar 144 3.4 Radio V.H.F. marino 144 3.4.1 Funcionamiento del Radio V.H.F. marino 144 3.4.2 Manual de operación del Radio V.H.F. marino 145 3.5 Radio H.F. 145 3.5.1 Funcionamiento del Radio H.F. 145 3.5.2 Manual de operación del Radio H.F. 145 Submódulo IV. Navegación en embarcaciones que operan con motor estacionario 145 4. Navegación con embarcaciones para pesca deportiva y recreativa 145 4.1 Esfera terrestre 145 4.1.1 Definición de : ejes, polos, ecuador, paralelos, meridianos, latitud y longitud 147 4.2 Compás magnético 147 4.2.1 Uso del compás magnético 149 4.2.2 Desvío del compás magnético 151 4.3 Husos horarios 152 4.3.1 Tiempo universal 153 4.3.2 Hora civil local 153 4.4 Cartas de navegación 154 4.4.1 Tipos de cartas de navegación 154 4.4.2 Rumbos y distancia entre dos puntos 155 4.5 Navegación 159 4.5.1 Costera 160 4.5.2 Estima 4.5.3 Electrónica 161 4.6 Maniobras de atraque y desatraque en muelles 163 4.6.1 Con viento de tierra 164 4.6.2 Con viento de mar 165 4.6.3 Con corriente 165 4.6.4 Con viento y corriente 165 4.7 Maniobras de remolque 166 4.7.1 Con buen tiempo y mal tiempo 166 Bibliografía 167

98
OBJETIVO Este material ha sido diseñado para facilitar el trabajo del alumno de la especialidad de Técnico en Pesca Deportiva y Buceo para el módulo II: Operación de embarcaciones con motores estacionarios, al proporcionarle una guía donde se especifican los contenidos y las actividades de dichos módulos y, de esta manera facilitarle la construcción de conocimientos, el desarrollo de habilidades y la formación de actitudes, que les permitan solventar las necesidades de las empresas del sector social y privado dedicadas a la pesca deportiva, buceo y otros servicios.
INTRODUCCIÓN El presente material ha sido elaborado con la finalidad de que el alumno de la carrera de Pesca Deportiva y Buceo en el módulo II: Operación de embarcaciones con motores estacionarios, cuente con la información necesaria que le permitirá construir el conocimiento a cerca de las herramientas manuales y la operación de las embarcaciones con motores estacionarios. Este material contribuirá a la construcción de conocimientos, al desarrollo de las habilidades y la formación de actitudes de los alumnos de la especialidad, cuyo propósito en este segundo módulo es operar embarcaciones con motores estacionarios. Los datos aquí presentados han sido recopilados de las fuentes de información actualizada y reproducida en la temática tratada, así como de las principales marcas de motores estacionarios que se encuentran actualmente en el mercado y cuyos datos aparecen en la bibliografía al final de este manual.

99
MÓDULO II. OPERACIÓN DE EMBARCACIONES CON MOTORES ESTACIONARIOS SUBMÓDULO I. Nomenclatura náutica y tecnología naval en embarcaciones con motores
estacionarios 1. Dimensiones de una embarcación con motor estacionario 1.1 Conceptos generales 1.1.1 Eslora, manga, puntal, francobordo, calado, asiento, desplazamiento y arqueo Eslora máxima: longitud de la embarcación. Es la distancia medida paralelamente a la línea de agua de diseño, entre dos planos perpendiculares a la línea de crujía, uno a proa y otro a popa, sin considerar elementos no estructurales del casco. Manga máxima: anchura de la embarcación. Es la máxima anchura del casco con las estructuras fijas. Máxima dimensión vertical medida desde la parte superior de la quilla hasta cubierta principal. Cada uno de los pilares que soportan las cubiertas. Palo para manejar cargas.
Dimensiones de una embarcación (eslora y manga)

100
Puntal: tiene tres posibles acepciones.
Dimensiones de una embarcación (puntal, francobordo y calado)
Francobordo: distancia vertical desde la línea de flotación en carga máxima y la cubierta estanca superior. Calado: profundidad de la embarcación. Es la máxima dimensión sumergida del casco medida verticalmente, sin contar el timón, la orza, las colas de los motores y otros apéndices similares. Calado a popa: distancia entre la parte inferior de la quilla y la línea de flotación a popa de la embarcación. Calado a proa: distancia entre la parte inferior de la quilla y la línea de flotación a proa de la embarcación. Calado en el medio: distancia entre la parte inferior de la quilla y la línea de flotación en el medio de la eslora de la embarcación. Calado medio: semisuma de los calados a popa y a proa.
Tipos de calados

101
Asiento: es la diferencia entre los calados de proa y de popa. Asiento positivo: el calado de proa es menor que el de popa. Asiento negativo: el calado de proa es mayor que el de popa. Asiento neutro: los calados de proa y de popa son iguales.
Tipos de asientos
Desplazamiento: peso del barco, medido en toneladas métricas. Desplazamiento máximo: peso máximo de la embarcación en condiciones de seguridad. Arqueo: expresa el volumen interior de la embarcación. Medido en toneladas Moorson (1Tmo= 2,83 m3 = 100 pies3) (sinónimo: Tonelada de Registro Bruto o TRB). Arqueo neto: es el volumen de los espacios de uso comercial del buque. 1.1.2 Componentes del casco y cubierta Proa: es la parte delantera de la embarcación que abre camino a las aguas. Popa: es la parte posterior de la embarcación. Babor: la parte izquierda de la embarcación mirando de popa a proa. Estribor: la parte derecha de la embarcación mirando de popa a proa.

102
Componentes del casco
Costados: cada una de las partes laterales y exteriores del casco. Se suele confundir con las Bandas. Bandas: cada una de las mitades que divide la línea proa-popa (crujía). Amuras: partes delanteras de los costados, desde el través convergiendo en la proa. Aletas: partes posteriores de los costados, desde través convergiendo en la popa. Línea de crujía: eje longitudinal (popa-proa) de la embarcación. Línea de flotación: es la intersección entre la parte sumergida y la parte que emerge del agua de la embarcación. Obra viva: es la parte del casco por debajo de la línea de flotación (sinónimo: carena). Obra muerta: es la parte del casco por encima de la línea de flotación. Cubierta: cada uno de los pisos de la embarcación. Obra viva y obra muerta. Plan: es el piso más bajo de la embarcación.
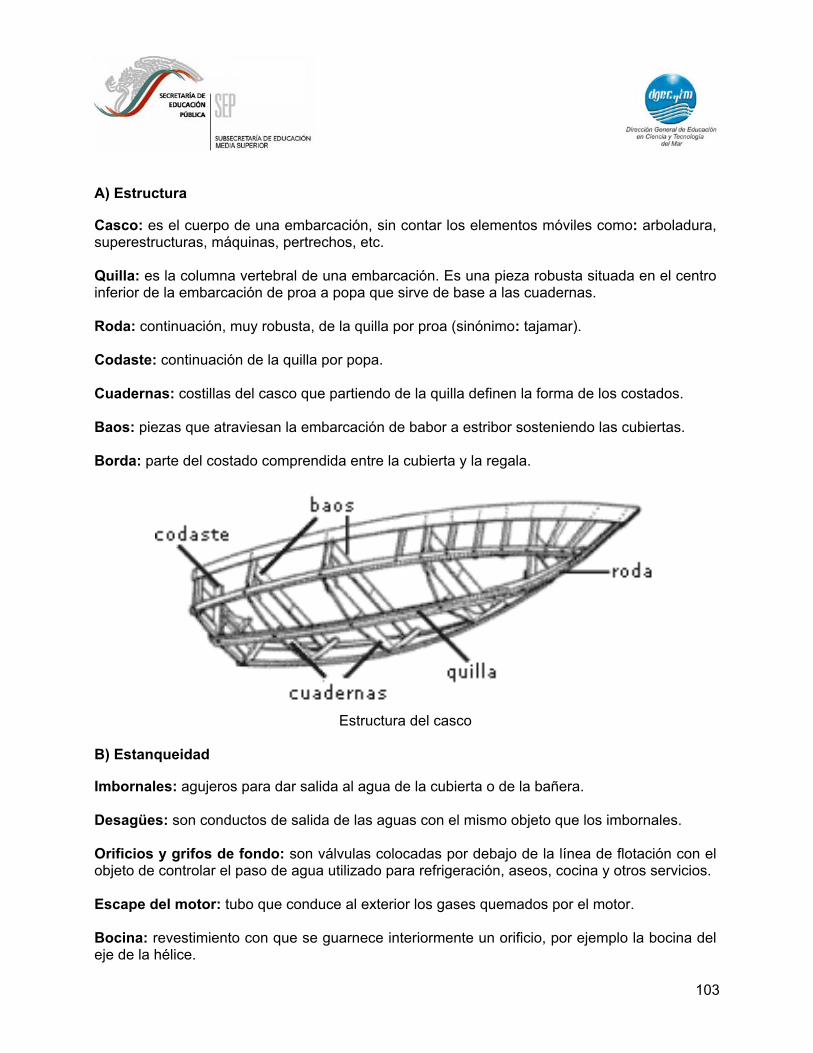
103
A) Estructura Casco: es el cuerpo de una embarcación, sin contar los elementos móviles como: arboladura, superestructuras, máquinas, pertrechos, etc. Quilla: es la columna vertebral de una embarcación. Es una pieza robusta situada en el centro inferior de la embarcación de proa a popa que sirve de base a las cuadernas. Roda: continuación, muy robusta, de la quilla por proa (sinónimo: tajamar). Codaste: continuación de la quilla por popa. Cuadernas: costillas del casco que partiendo de la quilla definen la forma de los costados. Baos: piezas que atraviesan la embarcación de babor a estribor sosteniendo las cubiertas. Borda: parte del costado comprendida entre la cubierta y la regala.
Estructura del casco
B) Estanqueidad Imbornales: agujeros para dar salida al agua de la cubierta o de la bañera. Desagües: son conductos de salida de las aguas con el mismo objeto que los imbornales. Orificios y grifos de fondo: son válvulas colocadas por debajo de la línea de flotación con el objeto de controlar el paso de agua utilizado para refrigeración, aseos, cocina y otros servicios. Escape del motor: tubo que conduce al exterior los gases quemados por el motor. Bocina: revestimiento con que se guarnece interiormente un orificio, por ejemplo la bocina del eje de la hélice.

104
Limera del timón: es el orificio por donde atraviesa el casco la parte superior del eje de giro de la pala del timón. Portillos: aberturas, generalmente de forma circular, que se practican en los costados de la embarcación o en los mamparos de las superestructuras para dar luz y ventilación. Escotillas: aberturas, generalmente rectangulares, practicadas en las cubiertas para establecer comunicación entre los distintos de departamentos de la embarcación. Tambucho: cierre para proteger la abertura de bajada al interior de la embarcación. Lumbreras: tambuchos cubiertos con cristal para dar luz y ventilación a las cámaras interiores. Manguerotes de ventilación: tubos de acero o fibra de vidrio situados de forma vertical sobre la cubierta y coronados con un capuchón semiesférico u oval que sirven para ventilación. Bombas de achique: Son máquinas destinadas a elevar líquidos, generalmente con objeto de extraerlos de los compartimentos interiores de la embarcación. C) Accesorios Cornamusas: pieza sólida en forma de T que afirmados a cualquier parte de la embarcación sirven para amarrar cabos. Se colocan vertical u horizontalmente.
Bitas: cada uno de los portes de madera o hierro que, fuertemente asegurados a la cubierta en las proximidades de la proa. Sirven para dar vuelta a los cables del ancla cuando se fondea la nave. Siempre se colocan horizontales. Serviola. Componente de la embarcación donde descansa el ancla y a su vez ayuda al cobrado de esta por medio de su rodillo. Ancla: instrumento pesado y fuerte en forma de arpón o anzuelo doble, que unido al extremo de un cabo, cadena o cable, firme a la embarcación y arrojado al agua sujeta la embarcación al fondo. Molinete: máquina de eje horizontal utilizada para levar cadenas (sinónimo: chigré, winche).

105
Escobén: orificio por donde sale la cadena del ancla (sinónimo: gatera). Timón: Plancha o pala que colocada a popa sirve para su gobierno (sinónimos: caña). Pala: parte que ejerce presión sobre el agua para producir el giro de la embarcación.
Palas
Mecha: eje del timón. Caña o rueda: mecanismos para indicar el giro a la pala del timón. Hélices: es el elemento propulsor de una embarcación equipada con motor.
Hélices
Paso: es lo que una hélice avanzaría teóricamente, en un medio sólido al dar una vuelta completa.

106
1.1.3 Elementos de amarre y fondeo A) Elementos de amarre Cabos: son las caballerías utilizadas a bordo de las embarcaciones. Estructura de los cabos: Varias fibras torsionadas forman la filástica, varias filásticas componen el cordón y varios cordones el cabo. Chicote: extremo de un cabo o cable. Seno: arco o curvatura que forma el cabo entre los extremos que lo sujetan. Firme: parte más larga o principal del cabo.
Elementos de un cabo
Gaza: anillo u óvalo que se hace en el chicote de un cabo y que sirve para hacer firme el cabo o enganchar algo en él. Puede ser fijo trenzando los cordones del chicote y el firme o provisional por medio de un nudo como el as de guía. Boza: es un trozo de cabo que permite sujetar un cabo, cadena o cable que está bajo tensión para manipularlo. Muertos: piezas sólidas y pesadas que descansan sobre el fondo y a los que se sujetan las boyas o balizas. Boyas: elementos flotantes amarrados a los muertos que sirven para amarre de las embarcaciones o señalización (objetos que permiten determinar la posición de un arte de pesca). Defensas: accesorio para proteger al atracar las embarcaciones del roce o golpes con otras embarcaciones o con el muelle.

107
B) Fondeo Definición: es la acción de afirmar una embarcación al fondo mediante anclas y amarras o cadenas. Buenos tenederos: arena fina y dura, fango compacto, arena fangosa y similar. Malos tenederos: los de piedra, los que estén en pendiente y los de fondo duro (piedra, etc.). Lugar: nos debe ofrecer resguardo del viento y de las corrientes. Debe disponer de la profundidad adecuada al calado y longitud de nuestros dispositivos de fondeo. Debe tener una buena salida para en caso de mal tiempo. Longitud del fondeo: la cantidad de cadena que debe dejarse caer oscila entre tres y cuatro veces la profundidad del lugar. Si hay mal tiempo o mucha corriente, cinco o seis veces la profundidad del lugar. Círculo de borneo: es el círculo que forma el barco al pivotar alrededor del ancla por efecto del viento o la corriente. Garreo: se produce cuando el ancla no se queda bien fijada y firme al fondo y arrastra sobre él. Se evita largando más cadena, cambiando de fondeadero, fondeando otra ancla o aguantando con máquina avante. Vigilancia durante el fondeo: una embarcación fondeada no debe ser considerada de igual forma que una embarcación amarrada y debe mantenerse una adecuada vigilancia durante el fondeo. Marcas: es conveniente hacer marcaciones a referencias en la costa a fin de comprobar si se está produciendo el garreo del ancla. Orinque: es el cabo que se hace firme a la cruz del ancla y se sujeta una boya para saber dónde está fondeada y para poder recuperar el ancla en caso de que se enroque.
Acción de fondear una embarcación

108
Maniobra de Fondeo Con un ancla: se apea el ancla y se desembraga el borboten. Nos aproximamos al lugar elegido proa al viento. Abrimos el freno del borboten filando cadena mientras vamos atrás. Una vez filada la cadena necesaria, la hacemos firme abordo. Con dos anclas: se suele usar en mal tiempo o por la mala calidad del fondeadero. Dos anclas por la proa: las dos anclas están muy próximas. Fondearemos con un ancla y dando un poco avante fondearemos la segunda. Levar: es la acción de cobrar (recuperar) el ancla y la cadena eliminado la situación de fondeo. Para ello daremos avante e iremos cobrando la cadena hasta estar a pique (llamar por la proa), continuaremos cobrando cadena hasta que esta se separe del fondo (zarpe), una vez liberada podremos iniciar la marcha con cuidado mientras terminamos del cobrar la cadena y hacemos firme el ancla abordo. 1.2 Estabilidad y flotabilidad A) Estabilidad En un cuerpo flotante la posición del metacentro (punto de intersección de las líneas ascendentes de los empujes verticales) con respecto al centro de gravedad es la que determina si el equilibrio es estable o inestable, cualquiera que sea la posición del centro de carena con respecto al centro de gravedad. Estabilidad inicial es la tendencia que tiene el buque a adrizarse por sí mismo cuando los ángulos de escora son pequeños (hasta 15º); forma parte del concepto de estabilidad transversal. En cambio, la estabilidad longitudinal es la tendencia de un buque a oponerse a un cambio de asiento. B) Flotabilidad Principio de Arquímedes Flotabilidad. ¿Por qué un trozo de plomo de (por ejemplo) algunos gramos se hunde en el agua y sin embargo un barco de varias toneladas flota en ella? El principio de Arquímedes explica la naturaleza de la flotabilidad. "Un cuerpo sumergido total o parcialmente en un líquido experimenta una fuerza ascendente igual al peso del líquido desplazado".

109
El volumen de agua desplazada es idéntico al volumen de la parte sumergida del cuerpo. Un cubo de 1 metro de arista, totalmente sumergido, desplazará exactamente 1 m3 de agua. Si el peso de este m3 de agua fuese 1,000 Kg, entonces el cubo experimentaría una fuerza ascendente de 1,000 Kg. Si el peso del cubo fuese 900 Kg, la fuerza ascendente sería mayor, por lo que el cubo subiría hasta que el peso del agua desplazada sea 900 Kg. El cubo estaría parcialmente sumergido (estaría flotando) y el volumen sumergido desplazaría exactamente 900 Kg de agua. El cubo tiene flotabilidad positiva. Asimismo, si el peso del cubo fuese 1,000 Kg, la fuerza ascendente sería igual al peso del cubo, por lo que tendría una flotabilidad neutra. Si el cubo pesara 1,100 Kg, la fuerza ascendente sería menor que su peso, por lo que se hundiría. En todo caso, dentro del agua el cuerpo está sometido a la fuerza ascendente de 1,000 Kg, por lo que tendría un peso aparente de sólo 100 Kg. El cuerpo tiene flotabilidad negativa. Ya hemos visto que la fuerza ascendente que actúa sobre un cuerpo parcial o totalmente sumergido es igual al peso del líquido desplazado. ¿De qué depende este peso? De la densidad del líquido y del volumen del cuerpo sumergido. El agua de mar es más densa que el agua dulce, por lo que 1 litro de agua de mar pesará mas que 1 litro de agua dulce. Un buceador sumergido en agua de mar desplazará igual cantidad de agua que él mismo sumergido en agua dulce; sin embargo, puesto que el peso del agua de mar será mayor al del agua dulce, el empuje (o fuerza ascendente) será mayor en el primer caso que en el segundo. Por tal razón será más fácil flotar en agua salada que en agua dulce. Asimismo, un buceador con mayor volumen desplazará mayor cantidad de agua que uno de menor volumen. Cuando un buceador inmerso en el agua infla su chaleco compensador, lo que está haciendo es aumentar su volumen, sin modificar su peso. Al aumentar su volumen aumenta también el volumen de agua desplazado, por lo que aumenta su empuje y adquiere flotabilidad positiva. El cuerpo humano tiene una densidad similar al del agua, por lo tanto tiene una flotabilidad neutra. Para nosotros es relativamente fácil hundirnos y salir a flote si sólo nos vestimos con trajes de baño. Sin embargo al utilizar un traje de buceo, nuestro volumen aumenta considerablemente, por lo que adquirimos flotabilidad positiva y se torna muy difícil sumergirnos. Por ello es necesario utilizar lastre adicional, de tal forma de volver a experimentar flotabilidad neutra o negativa.

110
C) Carena y empuje.
Centro de Carena, de empuje, de presión o volumen, en el centro de gravedad del volumen de la carena o sea, el punto de aplicación del empuje que el agua ejerce sobre la parte sumergida del buque y que por la simetría de este se halla en el plano diametral, se simboliza por “B”.
Centro de gravedad y carena. D) Centro de gravedad El punto en donde se considera que están concentrados todos los pesos que forman el desplazamiento del buque.
Centro de gravedad longitudinal (CLG). Es el centro de gravedad en el mismo sentido cuya línea de referencia para ubicarlo es la sección media (parte central del buque en el sentido longitudinal. Se abrevia O y es, generalmente, el centro del buque para efectos de cálculos); si este se encuentra a popa de O se considera negativo y si está a proa positivo.
Centro de gravedad longitudinal.

111
Centro de gravedad transversal (CTG). Centro de gravedad en el sentido transversal, la línea de referencia, es la central.
Centro de gravedad transversal.
Centro de gravedad vertical (CVG). Centro de gravedad en sentido vertical, su línea de referencia es la parte baja de la quilla.
Centro de gravedad vertical
E) Metacentro
Es el punto donde se corta la línea central del barco con la línea de acción de la fuerza de empuje.

112
Donde: G = Centro de gravedad B = Centro de carena GZ = Brazo de adrizamiento cuando es positivo GZ = Brazo de adrizamiento cuando es negativo GM = Altura metacéntrica (es la medida de la estabilidad inicial o la habilidad del buque de
resistir escoras iniciales partiendo de la posición inicial) BM = Es el radio metacéntrico Sen θ = Es el ángulo de escora F) Distribución de pesos a bordo Efectos de los pesos a bordo. Los efectos de los pesos pueden ser considerados bajo las siguientes condiciones:
• Elevación o descendimiento de pesos ya colocados a bordo. • Aumento o removimiento de pesos. • Suspensión de pesos (esto es en una pluma). • Movimiento transversal de pesos fijos a bordo.
Levantamiento de un peso a bordo
Pesos que están a bordo
Si un peso de (w) toneladas es levantado a una distancia (d) pies, el Centro de Gravedad del buque también ascenderá a una nueva posición G1. La altura metacéntrica GM decrecerá en una cantidad G G1. La fuerza (w) multiplicada por la distancia (d) es llamada el MOMENTO. Este es equivalente a peso o desplazamiento del barco multiplicada por el efecto (distancia G G1) sobre G. Esto es: w x d = W x G G1 ;

113
Donde la pérdida de la altura metacéntrica es G G1 = w x d / W Donde W (a menudo designado por) es el desplazamiento del barco en toneladas. Adviértase que no hay cambio ni en asiento cuando un peso ya a bordo es elevado. Bajando un peso se obtiene el efecto contrario por el incremento de GM. Pesos añadidos y removidos
Los pesos añadidos y removidos de un barco causarán: a) Aumento o disminución del desplazamiento b) Aumento o disminución del calado c) Alteración del cambio de asiento hacia popa o proa a menos que se añada el peso al centro
del buque d) Elevación o descendimiento de G (centro de gravedad) e) Alteración de B y M (centro de carena y metacentro) f) Escora a menos que se añada el peso sobre la línea central del buque pero esto no es
significante para pesos moderados Aunque la posición de M y G cambien no habrá, en efecto, cambio en su posición relativa en el caso de que el valor de GM permaneciera el mismo. G) Escora Inclinación que adopta un buque por efectos de la estiba de la carga, fuerza del viento o cualquier otra causa. Escora a estribor. Cuando el costado de estribor está a más profundidad que el de babor
Escora a estribor

114
Escora a babor. El costado de babor está más profundo que el de estribor
Escora a babor
H) Asiento Recibe el nombre de asiento o trimado, la diferencia de calados entre popa y proa. Llamamos asiento apopante o positivo, cuando el calado de popa es mayor que el de proa, y aproante o negativo, cuando el calado proa es mayor que el de popa.
Asiento apopante y asiento aproante.

115
Alteración. Cuando el asiento del buque por traslado o embarque de pesos. La alteración puede ser positiva o apopante y negativa o aproante, según el sentido de la variación del asiento final con respecto al inicial.
Podemos prescindir del signo en la alteración, poniendo el asiento mayor de minuendo y llamando a la alteración de igual forma que a este asiento; o sea, sí el mayor es el asiento apopante, así será la alteración. 1.3 Equipo de seguridad 1.3.1 Contra incendios (clasificación de incendios y equipo) • Generalidades de la lucha contra incendio Sobre el fuego y tipos de incendio El fuego es una oxidación rápida, en la que se produce emisión de luz. Se limita el uso de la palabra "combustión" a una oxidación lenta, sin que se produzca llama. Tres elementos deben existir para que sea posible el fuego: un combustible, oxígeno, y una temperatura alta (variable según el combustible) que inicie la reacción, este último es llamado "fuente de ignición". Esto es lo que suele llamarse "el triángulo del fuego". En algunos casos deben considerarse también otros factores, pero para la mayoría de los fuegos podemos tener en cuenta estas tres. Cuando un material es sometido a su temperatura de ignición, comienza a reaccionar oxidándose, y libera más calor. Se produce entonces una reacción en cadena, que continuará hasta que se consuma todo el combustible o algún factor externo la inhiba. Las fuentes de ignición se clasifican (un poco arbitrariamente) de tres tipos: químicas (dos productos se mezclan combinándose en una reacción exotérmica), biológica, cuando esa reacción se origina en organismos vivos (una fermentación), o física (aplicación de temperatura de una fuente externa).

116
En relación al combustible (material inflamable), puede disponerse de información respecto de sus características. Para empezar, definimos la inflamabilidad como la capacidad de combinarse con el oxígeno e incendiarse. El punto de ignición es la temperatura a la que, en presencia de oxígeno, el material se inflama. Todos los métodos de extinción de incendios trabajan tratando de restar uno de estos tres elementos. Así, por ejemplo, un extintor de CO2 (anhídrido carbónico) actúa desplazando el aire (que contiene oxígeno) y reemplazándolo por el gas del extintor. En cambio cuando se usa agua sobre un madero encendido, el efecto principal de ésta es enfriar de forma tal que no pueda encenderse. Cuando cubrimos de espuma una superficie de combustible encendido, lo que estamos haciendo es separar el combustible del oxígeno del aire, asfixiándolo. Debe tenerse en cuenta que un puede iniciarse de muchas formas, y no sólo por aplicación de una llama. Así pues, el carbón húmedo reacciona con el oxígeno del aire, lentamente y sin producir llama. Pero el calor que desprende esta reacción, acumulado en un espacio cerrado (una bodega) puede acelerar el proceso hasta provocar un incendio de proporciones. Prácticamente todos los materiales que nos rodean pueden arder, aunque la temperatura a la que lo hacen varía enormemente. De acuerdo a las normas ISO 2941 y NFPA10, los incendios se clasifican en tres clases, según el tipo de elementos combustibles: Clase "A": Sólidos Son generalmente de naturaleza orgánica, y tal que la combustión se produce dejando rescoldos. Maderas, colchones, cortinas, revestimientos etc. Se combate principalmente por ENFRIAMIENTO, utilizando:
• manguera con chorro de agua y matafuego portátil de espuma
Incendio tipo “A” (sólidos).

117
Clase "B": Líquidos Son sustancias líquidas o sólidos licuables. Petróleo crudo, livianos, aguarrás pintura, sentina. Se combate por SOFOCACION, utilizando:
• Espuma (de matafuegos portátiles, del sistema fijo de espuma a cubierta, o de lanzas o equipos portátiles)
• CO2 (anhídrido carbónico) de matafuegos o del sistema fijo de CO2 a cuarto de bombas y sala de máquinas
• polvo químico seco (de matafuego manual o sobre ruedas)
• vapor (instalaciones fijas)
Incendio tipo “B” (líquidos) Clase "C": Eléctricos Tableros cableados y equipos eléctricos.
Se combate por SOFOCACION, utilizando:
• CO2 (matafuegos portátiles o sistema fijo a cuarto de bombas o sala de máquinas
• Polvo químico seco (de matafuego manual o sobre ruedas)
Incendio tipo “C” (eléctrico). Clase "D": Metales Son:
• Espuma aquellos que afectan a metales combustibles (magnesio, titanio, sodio, circonio, litio, potasio)
• Se combate con polvos químicos especiales.

118
Clase "E" En algunos países se clasifica como "E" a los incendios que involucran gases. Nota: En cuanto a tipo de extintores, la O.M. Nº 04/76 sigue la clasificación A/B/C precedente, pero la reglamentación internacional (SOLAS/ IMO Res. A602 (15)) difiere, ya que en ésta la clase C son gases, siguiendo la norma ISO3441/EN. • Sistemas portátiles de lucha contra incendio Extintores En los buques se encuentran habitualmente cinco tipos de extintores: Agua, o espuma presurizada normalmente con (CO2 o nitrógeno). Este tipo de extintor, sólo apto para incendios del tipo “A” con suficiente eficacia, ha sido reemplazado por otros, encontrándose casi exclusivamente en instalaciones anteriores a 1970. Generalmente se encuentran en cilindros con capacidades de 10 litros, con el propelente instalado ya en un tubo interno, ya en uno exterior de menor tamaño. Bajo ningún concepto deben utilizarse sobre instalaciones eléctricas. El agua se congelará a 0º C. Química, en extintores de 10 y 9 litros y / o carros de 45 o más litros. La espuma se produce por reacción química entre dos soluciones acuosas (de sulfato de aluminio y bicarbonato de sodio). Para su uso se debe transportar en posición vertical hasta el lugar del incendio, y recién entonces se le da vuelta. Tras unos instantes se produce la reacción química, y comienza a salir espuma por el pico. Debe dirigirse no directamente hacia el fuego, sino de forma que se extienda cubriendo la superficie encendida (evitando que se produzcan salpicaduras de combustible si es un líquido). Puede congelarse a temperaturas menores de 5° C, o sufrir alteraciones a temperaturas mayores de 40° C. Se utiliza principalmente en incendios de tipo "A" y "B". Actualmente se tiende a reemplazar este tipo de extintor por los de polvo químico seco. Por ejemplo, en caso de una bandeja que contenga F.O. encendido, se debe dirigir el chorro contra una de las paredes de la misma, de forma que la espuma chorree extendiéndose luego por la superficie del líquido. De este modo formará una capa que al separar el combustible del aire, asfixiará al fuego, extinguiéndolo. Precauciones:
• Debe mantenerse el pico limpio, de otro modo la presión que se genera al formarse la espuma en el interior del mata fuegos puede hacerlo estallar.

119
• No puede usarse parcialmente. Basta con que se mezclen un poco los líquidos contenidos para que el extintor deba recargarse. Por este motivo los matafuegos de espuma nunca deben sacudirse ni moverse de lugar, a menos que se los vaya a utilizar.
• Por ningún motivo se usarán en instalaciones eléctricas o donde se presuma que puede
existir corriente. Podrían generar un corto circuito o provocar la muerte del operador por electrocución. En caso de que sea imprescindible utilizarlo sobre un circuito eléctrico, se asegurará primero de que el mismo se encuentre desconectado.
• Su duración normal es de aproximadamente un año, después de lo cual debe
recargarse.
• CO2 (anhídrido carbónico), habitualmente en extintores de 4.5, 5, 7 y 9 kg. Se deben utilizar teniendo en cuenta que: 1) el gas tiende a dispersarse, si el área no se halla confinada. 2) el gas es más pesado que el aire, y tenderá a acumularse en los lugares bajos. 3) al expandirse en la tobera.
1.3.2 Versos del Capitán Thomas Gray. Tabla 1. Versos del Capitán Thomas Gray
Versos De Thomas Gray I Si ambas luces de un vapor, por tu proa has avistado debes caer a estribor, dejando ver tu encarnado (rojo)
II Si da el verde con el verde o encarnado con su igual, entonces nada se pierde, siga su rumbo cada cual
III Si a estribor ves colorado, debes con cuidado maniobrar, cae a uno u otro lado, para máquinas o manda a ciar.
IV Si acaso por tu babor la verde se deja ver, sigue avante ojo avizor débase el otro mover.
V Está siempre vigilante y ten presente además, que si hay riesgo por delante, para máquinas o manda atrás.

120
1.3.2 Código Internacional de Banderas. Tabla 2. Código Internacional de Banderas
Código Internacional de Señales Bandera Letra Fonética Semáforo Morse Significado
A Alfa
.- Tengo un buzo sumergido, manténgase alejado de mi y a poca velocidad.
B Bravo
-... Estoy cargando, descargando o transportando mercancías peligrosas.
C Charlie
-.-. Afirmativo "SI", o "El significado de los grupos debe interpretarse en sentido afirmativo".
D Delta
-.. Manténgase alejado de mí, estoy maniobrando con dificultad.
E Echo
. Caigo a estribor.
F Foxtrot
..-.. Tengo avería, póngase en comunicación conmigo.
G Golf
--. Necesito práctico. (Cuando se hace por barcos pesqueros trabajando próximos en los bancos de pesca, significa: "Estoy cobrando las redes").
H Hotel
.... Tengo práctico a bordo.
I India
.. Caigo a babor.

121
Código Internacional de Señales Bandera Letra Fonética Semáforo Morse Significado
J Julieta
.--- Tengo incendio y llevo a bordo mercancías peligrosas, manténgase bien alejado de mí.
K Kilo
-.- Necesito comunicarme con usted.
L Lima
.-.. Pare su buque inmediatamente.
M Mike
-- Mi buque está parado y sin arrancada.
N November
-. Negativo "NO", o "El significado del grupo anterior debe ser interpretado en sentido negativo".
O Oscar
--- ¡Hombre al agua!
P Papa
.--. En puerto. Todo el personal debe regresar a bordo por tener el buque que hacerse a la mar.
Q Quebec
--.- Mi buque está "sano" y pido libre plática.
R Romeo
.-. "Recibido" o "He recibido su última señal"

122
Código Internacional de Señales Bandera Letra Fonética Semáforo Morse Significado
S Sierra
... Estoy dando atrás.
T Tango
- Manténgase alejado de mí. Estoy pescando al arrastre en pareja.
U Uniform
..- Se dirige usted hacia un peligro.
V Víctor
...- Necesito auxilio.
W Whiskey
.-- Necesito asistencia médica.
X X-Ray
-..- Suspenda usted lo que está haciendo y preste atención a mis señales.
Y Yankee
-.-- Mi ancla esta garreando.
Z Zulu
--..
Necesito remolcador. Cuando se hace por barcos pesqueros trabajando próximos en los bancos de pesca, significa: "Estoy cobrando redes"

123
Tabla 3. Código Internacional de numerales.

124
1.3.4 Balizas y boyas Se entiende por balizas, todas las señales flotantes y fijas (exceptuando los faros), que se utilizan para indicar los márgenes y ejes de canales navegables, los peligros naturales y naufragios, así como los puntos de recalada y de interés para los navegantes. Las marcas se distinguen de día por su color, forma y marca de tope y de noche, por sus luces. Al estar sometidas a las inclemencias meteorológicas, pueden desplazarse o desaparecer, por tanto, hay que utilizarlas con precaución. Las balizas fijas (postes o pilares en aguas poco profundas) nos indican canales o señalizan bajos fondos. Las boyas son balizas flotantes, de menos altura que éstas, que disponen de una luz de corto alcance. En las bocanas de los puertos la que hay que dejar a estribor es de color verde y de color rojo la que se deja a babor. Sistema lateral región "A" Existen dos zonas de balizamiento en el mundo. España está incluida en el Sistema A: Sistema combinado lateral y cardinal (rojo a babor y verde a estribor entrando de mar a tierra). Sistema lateral región “B” (rojo a estribor y verde a babor entrando de mar a tierra). Sistema Cardinal de peligro aislado, aguas navegables y especiales. Tabla 4. y Balizas y boyas.
Marcas laterales sirven para indicar los lados de los canales de navegación
Lateral Babor Lateral Estribor
Cilindro, castillete o espeque. Marca de tope un cilindro. Color rojo. Luz roja con cualquier combinación excepto Gp
Cónica, castillete o espeque. Marca de tope es un cono. Color verde. Luz verde con cualquier combinación excepto Gp (2+1)V. (2+1)R.

125
Marcas de bifurcación sirven para indicar una bifurcación y la dirección del canal principal
Bifurcación a babor con canal principal a Bifurcación a estribor con cestribor
anal principal a babor
Cilindro, castillete o espeque. Marca de tope un cilindro. Color rojo con franja verde. Luz roja Gp(2+1)R.
Cónica, castillete o espeque. Marca de tope es un cono. Color verde con franja horizontal roja. Luz verde Gp(2+1)V.
Peligro aislado Aguas navegables
e o espeque. Castillet
Marca de tope dos esferas negras superpuestas. Negro con franjas horizontales rojas Luz blanca Gp(2)B.
Esférico, castillete o espeque. Marca de tope Franjas verticales rojas y blancas. Luz blanca isofase, ocultaciones, destello caad 10seg. o señal mores "A"
es una bola roja.

126
Castillete o espeque. Marcas de tope son dos conos según el cuadrante. Franjas horizontales amarillas y negras. Luz blanca según el cuadrante
Marcas cardinales indican el lado navegable de algún punto de interés
Marcas especiales: Señalan zonas especiales. Son de color amarillo y de forma distinta a las señaladas anteriormente. La marca de tope es un aspa amarilla. Luz amarilla.
Señalamiento marítimo con balizas y boyas.

127
. Funcionamiento de los motores estacionarios 2.1 Marcas principales y potencias de los motores estacionarios.
2
Motores estacionarios marinos.
2.1.1 Caterpillar 2.1.2 Cummins 2.1.3 General motors 2.1.4 Perkins 2.2. Componentes de los motores estacionarios 2.2.1 Turbo alimentador 2.2.2 Inyectores El último eslabón importante en la cadena de inyección de combustible, son los inyectores. En ellos la cantidad medida de combustible suministrada a muy alta presión por la bomba de inyección levanta de su asiento una válvula cargada por un muelle y surge del extremo de la boquilla en forma de pulverización atomizada el combustible.

128
.- Tuerca de boquilla
.- Muelle 5.- Placa superior del muelle 6.- Tuerca de cabeza del muelle 7.- Tuerca de cabeza 8.- Arandela de junta 9.- Arandela de junta 10.- Arandela de junta 11.- Adaptador de alimentación 12.- Conexión del sobrante 13.- Perno anular 14.- Boquilla 15.- Válvula de aguja 16.- Orificios de pulverización
1.- Soporte de boquilla
23.- Varilla 4
cción
combustible el siguiente componente es la bomba de inyección. Casi con bomba en línea, con embolo independiente para cada cilindro o bien una
a de una bomba central con un elemento giratorio que distribuye el cada cilindro a medida que gira.
as posiciones típicas de purga
uede haber dos)
decantador)
7.- Carcasa del regulador mecánico 8.- Palanca de aceleración 9.- Acople del avance automático
Inyector de varios orificios. 2.2.3 Bomba de inye Siguiendo el flujo deeguridad será una s
bomba rotativa, que constcombustible al inyector de Las letras indican l
(A) Punto de purga del filtro secundario (B) Tornillo de purga de la bomba de inyección (p(C) Punto de purga del inyector
1.- Filtro primario (2.- Grifo de drenaje 3.- Bomba de alimentación 4.- Filtro secundario aglomerador 5.- Grifo de drenaje 6.- Bomba de inyección en línea

129
n frío (exceso de
ulador de control de sobrealimentación
imentación sitivo anti-
le de alta presión
1.- Botón de arranque ecomestible) 2.- Estrang3.- Unidad4.- Soporte de la válvula de al5.- Amortiguador de ralenti (dispocalado) 6.- Tubo de combustib7.- Inyector
Sistema de combustible de un motor diesel (bomba de inyección).
tible demás de filtrar las partículas sólidas más grandes.
Decosistema electrónico que dispara una alarma o corta la
limentación si el gua alcanza un cierto nivel. El vaso debe
se a la mar y hay que eriódicamente.
ador o difusor
2.2.4 Múltiple de escape 2.2.5 Filtro primario tipo decantador Diseñado para separar el agua del combusa
be tener un vaso transparente para que se vea la ntaminación, y los tipos más avanzados tienen un
aainspeccionarse antes de hacervaciarlo y limpiarlo p
(1) Cabeza del filtro (2) Elemento decant(3) Cámara de decantación (4) Tapón de drenaje (5) Punto de purga (6) Perno centra
Filtro primario (decantador)

130
ios
tema de combustible
ncia del combustible limpio es muy importante. El gasoleo debe cumplir las especificaciones que indique el manual del motor.
1.- Filtro primario (decantador) 2.- Grifo de drenaje 3.- Bomba de alimentación 4.- Filtro secundario aglomerador 5.- Grifo de drenaje 6.- Bomba de inyección en línea 7.- Carcasa del regulador mecánico
.- Palanca de aceleración 9.- Acople del avance automático 10.- Botón de arranque en frío (exceso de ombustible)
2.- Unidad de control de sobrealimentación n
4.- Amortiguador de ralenti (dispostivo anti-
2.2.6 Escape 2.2.7 Generador 2.3 Sistemas de los motores estacionar 2.3.1 Sis La importa
8
c11.- Estrangulador 113.- Soporte de la válvula de alimentació1calado) 15.- Tubo de combustible de alta presión 16.- Inyector
Sistema de combustible
ro secundario B. Tornillo de purga de la bomba de inyección
de purga del inyector
Las letras indican
A. punto de purga del filt
C. Punto

131
de encendido
lubricación
lubricación de un típico motor de 4 tiempos, sea e gasolina o diesel.
.- Colador del aceite cerca del fondo del
3.- Válvula de alivio de presión
jinete de
través del la
a través de la
válvulas
2.3.2 Sistema 2.3.3 Sistema de La figura muestra un diagrama del sistema ded
1cárter 2.- Bomba de aceite
4.- Refrigerador del aceite 5.- Filtro de aceite 6.- Galería de reparto 7.- Alimentación de aceite al co bancada 8.- Alimentación de aceite a cigüeñal al cojinete de cabeza de bie9.- Alimentación de aceite biela al cojinete de pie y al bulón 10.- Alimentación de aceite al mecanismo de11.- Varilla 12.- Bomba de vaciado 13.- Tapón de vaciado del cárter
Sistema de lubricación.
La mayoría de los motores marinos están refrigerados por agua, pero hay algunas unidades de aja potencia que se refrigeran por aire con una conducción
2.3.4 Sistema de enfriamiento
b adecuada y n ventilador.

132
2.3.5 Sistema de transmisión 2.4 Mantenimiento preventivo y correctivo me
aceite
nor.
y filtros.
ras.
.4.3 Revisión de niv les (aceite, agua y anticongelante).
2.4.1 Cambio de 2.4.2 Cambio de bandas y mangue 2 e

133
3.0 Equipo de navegación y comunicación 3.1 Sistema de posicionamiento global (G.P.S.) 3.1.1 Funcionamiento del G.P.S.
Constelación satelital.
sistema que sirve para determinar nuestra posición con coordenadas de Latitud, Longitud y Altura. Se basa en una constelación de 21 satélites que orbitan a la tierra a una altura de 20200 Km, necesitando 11h58m para describir una orbita completa.
GPS (Sistema de Posicionamiento Global). Es un
Satélite
Para conocer nuestra posición debemos poseer un receptor GPS, el sistema mide la distancia desde cada satélite a la antena del receptor. Para obtener la distancia los satélites envían ondas de radio a 300.000 km por segundo, mide el tiempo entre el momento que salió la señal y el momento en que llegó al receptor. Como distancia es igual a velocidad por tiempo (S=VxT), entonces podemos determinar sin ningún problema la distancia entre la antena y el satélite. Claro este cálculo lo realiza el receptor.

134
on un satélite se obtiene una distancia, esto quiere decir que la posición a determinar puede estar en cualquier punto de una esfera hueca a una distancia x desde el satélite.
C
Orbita satelital
Con dos satélites el punto uede estar en algún lugar del írculo de intercepción de las os distancias de los satélites.
pcd
Intercepción de las do
s distancias de los satélites
Midiendo la distancia desde tres satélites podemos reducir a dos puntos en el espacio el
lugar en que podemos encontrarnos. Esto quiere decir que una posición es verdadera y
la otra es falsa. El sistema en si puede determinar cual punto es incorrecto porque no
está cerca de la Tierra.
Intercepción de las tres distancias de los
satélites.

135
inalmente midiendo la distancia a cuatro satélites puedo determinar la posición de un punto. F
Intercepción de cuatro distancias de los satélites
Los receptores GPS están diseñados de acuerdo al tipo de aplicaciones como: Geodesia, Topografía, Navegación Marítima, Navegación Aérea, Navegación Terrestre, Cartografía, AVL
ehículo). Cada receptor posee funciones y precisiones licación. La precisión de los GPS varía desde 100 metros a
El G.P.S. (Global Positioning System) es un sistema de radionavegación espacial desarrollado por el Departamento de Defensa de los EE.UU. a partir del año 1973. Las primeras señales de prueba fueron emitidas por un satélite de pruebas lanzado en junio de 1977. Con el primer grupo de satélites (Bloque I), el sistema completo fue probado experimentalmente y refinado, al mismo tiempo que se construían las estaciones de seguimiento terrestres. Con los resultados
e las pruebas surgieron los satélites del Bloque II (año 1989). El GPS comenzó a ser completamente funcional a partir de 1994 y se diseñaron los satélites más modernos del Bloque IIR, destinados a reemplazar a los del Bloque II. Los satélites GPS de última generación, actualmente en proceso de diseño, se denominan Bloque III.
onstelación de 28 satélites operativos y sus correspondientes estaciones terrestres. En el segmento espacial, formado por los satélites y las e comunicaciones bidireccionales. No obstante, en el segmento terrestre los usuarios finales únicamente disponen de receptores, sin necesidad de
lite. Esta es una gran ventaja de cara a la miniaturización de los equipos receptores de GPS. El segmento de control está formado por cinco estaciones monitoras, situadas en Hawai, Kwajalein, la Isla Ascensión, Diego García y Colorado Springs; tres en la Isla Ascensión, Diego García y Kwajalein, y un ter
(Localización Automática de Vespecíficas de acuerdo a su apprecisión milimétrica. Descripción del GPS
d
Actualmente forman parte del sistema una c
staciones de control, se utilizan lógicamente
transmitir datos de ningún tipo hacia el saté
antenas terrestres, situadas a estación de control maestra (MCS, Mas

136
Control Station), ubicada en la Base Aérea de Schriever en Colorado (EE.UU.). Las estaciones e
on procesados por la estación de control maestra, que a su vez se encarga de actualizar los datos de navegación que transmitirá cada satélite. La MCS envía estos datos a los satélites a través de las estaciones dotadas de antenas terrestres. Funcionamiento del GPS En este apartado se ofrece una breve descripción del los fundamentos del sistema GPS, comenzando con los aspectos funcionales y ofreciendo algunas explicaciones técnicas. El GPS se basa en cinco puntos fundamentales, que se describen a continuación: Triangulación conociendo la distancia a tres satélites Como con cualquier otro sistema de radiolocalización, si calculamos la distancia a tres transmisores de posición conocida, podemos triangular nuestra posición en cualquier lugar de la Tierra.
sí pues, como primera premisa es necesario que nuestro receptor G.P.S. conozca la posición
tersección de la anterior esfera y otra actual de radio 17000 km alrededor tersección de ambas esferas es una circunferencia, luego con dos os en algún punto de dicha circunferencia.
resulta fundamental conocer la
1 de segundo, así que se hace necesaria la
monitoras realizan un seguimiento pasivo de los satélites, acumulando datos de telemetría qus
Aexacta de los satélites de la constelación. Supongamos que tomamos nuestra distancia respecto a un satélite y resulta ser de 18.000 km. Desde el punto de vista del satélite, nuestra posición estará en algún punto de una esfera de 18000 km. de radio alrededor de él. Ahora hacemos la misma medida de cara a otro satélite, y es de 17000 km. Por tanto, nuestra
osición estará en la inpde este satélite. La in
ediciones nos ubicamm Si además hacemos la misma medida con respecto a un tercer satélite y resulta ser de 20000 km, por ejemplo, precisaremos nuestra posición a la intersección de las tres esferas. La intersección de 3 esferas da lugar a dos puntos, de los cuales uno de ellos será una solución sin sentido para nuestro receptor. Como se verá más adelante, en la práctica es necesaria una medida adicional respecto a un cuarto satélite para precisar la posición. Forma de medir la distancia respecto a un satélite
omo ha quedado de manifiesto en el apartado anterior,Cdistancia a los satélites con una precisión lo más exacta posible para evitar errores. Para ello, nos valemos de la medida del tiempo que le cuesta llegar a una señal desde el satélite hasta nuestro receptor. Es decir, mediremos el tiempo de propagación de la señal electromagnética suponiendo que, idealmente, viaja a la velocidad de la luz.
stos tiempos son muy cortos, de alrededor de 1/1Eutilización de relojes de precisión. En los satélites es posible montar relojes atómicos de elevada precisión, pero los de los receptores terrestres forzosamente serán más imprecisos, luego la deriva del reloj será otro factor a tener en cuenta.
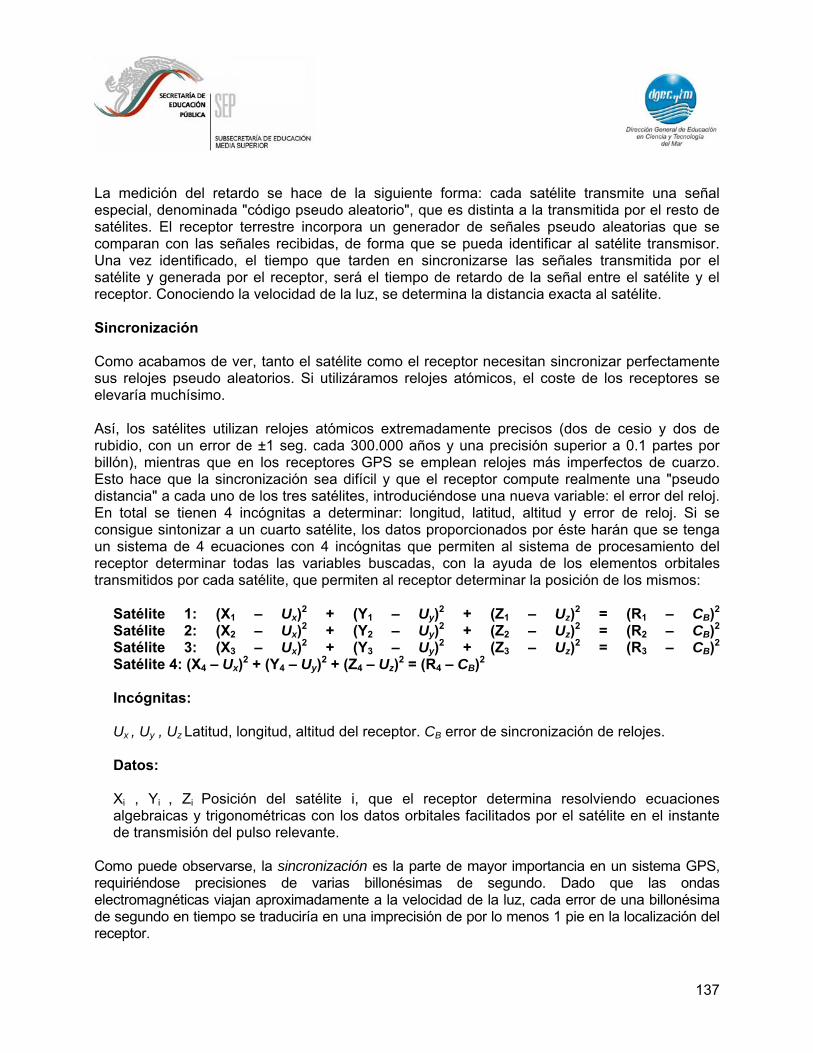
137
etardo de la señal entre el satélite y el ceptor. Conociendo la velocidad de la luz, se determina la distancia exacta al satélite.
incronización
de los receptores se levaría muchísimo.
sí, los satélites utilizan relojes atómicos extremadamente precisos (dos de cesio y dos de
ce que la sincronización sea difícil y que el receptor compute realmente una "pseudo istancia" a cada uno de los tres satélites, introduciéndose una nueva variable: el error del reloj.
s orbitales ansmitidos por cada satélite, que permiten al receptor determinar la posición de los mismos:
– Uz) = (R3 – CB) Satélite 4: (X – U ) + (Y – U ) + (Z – U ) = (R – C )
Datos:
Xi , Yi , Zi Posición del satélite i, que el receptor determina resolviendo ecuaciones
varse, la sincronización es la parte de mayor importancia en un sistema GPS,
a la velocidad de la luz, cada error de una billonésima e segundo en tiempo se traduciría en una imprecisión de por lo menos 1 pie en la localización del
La medición del retardo se hace de la siguiente forma: cada satélite transmite una señal especial, denominada "código pseudo aleatorio", que es distinta a la transmitida por el resto de satélites. El receptor terrestre incorpora un generador de señales pseudo aleatorias que se comparan con las señales recibidas, de forma que se pueda identificar al satélite transmisor. Una vez identificado, el tiempo que tarden en sincronizarse las señales transmitida por el satélite y generada por el receptor, será el tiempo de rre S Como acabamos de ver, tanto el satélite como el receptor necesitan sincronizar perfectamente sus relojes pseudo aleatorios. Si utilizáramos relojes atómicos, el coste e Arubidio, con un error de ±1 seg. cada 300.000 años y una precisión superior a 0.1 partes por billón), mientras que en los receptores GPS se emplean relojes más imperfectos de cuarzo. Esto hadEn total se tienen 4 incógnitas a determinar: longitud, latitud, altitud y error de reloj. Si se consigue sintonizar a un cuarto satélite, los datos proporcionados por éste harán que se tenga un sistema de 4 ecuaciones con 4 incógnitas que permiten al sistema de procesamiento del receptor determinar todas las variables buscadas, con la ayuda de los elementotr
Satélite 1: (X1 – Ux)2 + (Y1 – Uy)2 + (Z1 – Uz)2 = (R1 – CB)2 Satélite 2: (X2 – Ux)2 + (Y2 – Uy)2 + (Z2 – Uz)2 = (R2 – CB)2 Satélite 3: (X3 – Ux)2 + (Y3 – Uy)2 + (Z3 2 2
2 2 2 24 x 4 y 4 z 4 B
Incógnitas: Ux , Uy , Uz Latitud, longitud, altitud del receptor. CB error de sincronización de relojes.
algebraicas y trigonométricas con los datos orbitales facilitados por el satélite en el instante de transmisión del pulso relevante.
Como puede obserrequiriéndose precisiones de varias billonésimas de segundo. Dado que las ondas electromagnéticas viajan aproximadamentedreceptor.

138
las frecuencias de transmisión de los
dose el e X en la dirección del meridiano de Greenwich y el eje X situado a 90º al Este del eje X. El
dicular al plano XY en la dirección del Polo Norte geográfico. El origen de oordenadas corresponde con el centro de masas de la Tierra, suponiendo ésta esférica.
s sabido que la Tierra no tiene forma esférica sino que presenta un "achatamiento" por los
el entro de la Tierra y en las dimensiones del elipsoide, el modelo físico de la Tierra que emplean
lassig a =e2 = 0.00669437999014 Al conjunto formado por un sistema de coordenadas y un elipsoide de referencia se de de El siguiente paso es la conversión de coordenadas XYZ basadas en un sistema cartesiano como el descrito, a las coordenadas LLA (latitud-longitud-altura) con las que estamos cono La sobre un mapa de las medidas realizadas con un GPS (y en coordenadas
nto no son valores únicos, dependen del datum seleccionado. Así, por ejemplo,
Finalmente, reseñar que los receptores GPS computan la velocidad a partir de la variación de la posición respecto al tiempo, el desplazamiento Doppler de satélites, o bien combinando ambos métodos. Sistemas de coordenadas La posición determinada por el GPS está referenciada a un sistema de coordenadas denominado ECEF (Earth-Centered, Earth-Fixed). Se trata de un sistema de coordenadas que gira con la Tierra. En él, el plano XY se sitúa en el plano ecuatorial de la Tierra, hallánejeje Z es perpenc Sistema de coordenadas ECEF EPolos, dándole más bien el aspecto de un elipsoide de revolución, modelo que resulta más exacto que el esférico. En este modelo, las secciones paralelas al Ecuador son circulares, mientras que las secciones perpendiculares al mismo y que contienen al eje de revolución son elipsoidales. Las dimensiones del elipsoide de referencia vienen completamente definidas por dos parámetros. Estos parámetros pueden aparecer relacionados con otros, como la excentricidad (e, eccentricity) o la planitud (f, flattening), que vienen definidos de la siguiente forma: Aunque existen numerosos modelos cuyas diferencias radican básicamente en la situación dc
aplicaciones GPS es el World Geodetic System de 1984 (WGS-84), caracterizado por los uientes valores:
6378137.000 metros
nomina datum.
múnmente familiarizados. En este proceso se ven implicadas complejas ecuaciones que rmalmente son resueltas por el propio software de los receptores.
representación LLA) no presentaría mayor problema si no fuera porque los mapas actuales no emplean el elipsoide de referencia WGS-84. Ello se debe, además de a causas cronológicas, a que si bien este elipsoide es el que mejor representa la forma de la Tierra globalmente, no es el que mejor lo hace localmente. Este hecho da lugar a una importante conclusión: latitud, longitud y altura de un pu

139
ientras en Europa occidental se emplea el European Datum de 1950 (ED 50), en Australia se
los asociados al propio método de navegación: rrores de hasta 1.5 km dependiendo del lugar del mundo que se represente y en qué
isión del orden de metros del GPS.
que los ejes de rotación son los mismos entre diferentes istemas (no siempre es así), los elipsoides diferirán en cinco parámetros: la posición del centro
sté utilizando.
memplea el Australian Geodetic Datum y en EE.UU. el North American Datum de 1983 (NAD 83). Este pequeño, en apariencia, detalle puede ser un grave problema, puesto que los errores cometidos pueden llegar a ser mayores que ecoordenadas, frente a la prec Adicionalmente surge el problema de la proyección de las medidas tomadas en una superficie esférica o elipsoidal sobre una superficie plana como es un mapa. Aunque existen más de 250 proyecciones diferentes sobre un mapa, si la región en que se lleva a cabo la medida es suficientemente pequeña, el error introducido podrá considerarse despreciable (no así en áreas grandes). El problema de la proyección se resuelve matemáticamente mediante una transformación matricial. Resumidamente y considerando sde coordenadas (determinada por tres coordenadas) y la longitud de los dos semiejes del elipsoide de referencia. Para usuarios europeos, el proceso de conversión, en el que también se ven implicadas complejas ecuaciones. Es fundamental que los receptores realicen la conversión adecuada para el datum que se e
Datum x y z a e2
WGS-84 0 0 0 6378137.000 m 0.00669437999014
ED 50 - 84 m - 107 m - 120 m 6378388.000 m 0.00672267002233
onocimiento de laC posición de cada satélite
nsa (DoD) de EE.UU. determinó las órbitas precisas para los satélites, general. Todos los receptores dispondrán de dicho plan (gracias a los
misión, el DoD monitoriza constantemente la posición de los satélites
El Departamento de Defe
e acuerdo con un plan dmensajes de navegación) para conocer la posición exacta de cada satélite en todo momento.
esde el control de Dutilizando radares precisos, determinando con precisión los denominados "errores de efemérides" debidos a la gravedad del Sol y la Luna, y a la presión de la radiación solar. Una vez realizada esta monitorización, se transmite a cada satélite su posición exacta para que éste a su vez la incluya en sus señales de sincronización y en su código pseudo aleatorio.

140
2. Si aparece algún mensaje como 2 de FIX o No FIX, sólo oprimir tecla enter para confirmar
aja hasta guardar y oprimir ENTER
r hasta la ubicación 3. Oprimir ENTER
de la segunda fila de nuevo se pulsa ENTER 6. Bajar con el cursor a guardar y oprimir ENTER
C) Sacar una numeración
1. O tec U2. Buscar base de datos con el cursor y darle ENTER 3. En usuario oprimir ENTER
gar a cualquier pantalla de navegación
3.1.2 Manual de operación del G.P.S. G.P.S. portátil marca Magellan 315 A) Marcar y poner nombre
1. Oprimir tecla GOTO por 2 segundos
orden 3. Subir el cursor hasta el nombre 4. Oprimir enter 5. Con el cursor se elige una letra y se la da ENTER, y así sucesivamente hasta completar
el nombre y al finalizar bajar el cursor hasta OK y darle ENTER 6. Con el cursor se b
B) Meter una numeración
1. Pulsar la tecla GOTO por 2 segundos 2. Subir con el curso
4. Con el cursor cambiar los números, para la primera fila se pulsa ENTER al final de los cambios y para accesar a la segunda fila.
5. Y al terminar los cambios
primir la la MEN
4. Con el cursor elegir y darle ENTER 5. Para salir es oprimir la tecla NAV hasta lle
D) Borrar
1. Pulsar tecla MENU 2. Con el cursor buscar base de datos y darle ENTER 3. En usuario darle ENTER 4. Con el cursor se elige lo que quiere borrar y oprimir ENTER 5. Oprimir MENU con el cursor bajar a WPT y oprimir ENTER 6. Confirmar con ENTER 7. Salir con NAV hasta llegar a cualquier pantalla de navegación

141
nda.
3.2 Video sonda. 3.2.1 Funcionamiento del Video so
FCV1100 Buscador de los pescados del LCD del colo El FCV1100 nuevo es un buscador de alto rendimiento, dual-frequency de los pescados para los 35-65-plus. Este buscador de pantallun iene con el transmisor un 1kW, un 2kW o un 3kW
utiliza el sintetizador bre de Furuno (FFS), que los medios usted
pue plia gam Video sonda El triple, fondo-cerradura, Uno-alcance, mezcla, NavData y más. Car
n del paisaje (de la pulgada TFT píxeles VGA-640x480)
• Gabinete de exhibición fundido a troquel rugoso incorporado, porque montaje tablero o
res de Furuno, al menú y a los ajustes
l azul, el fondo azul, azul marino, negro o blanco ligero
• Ocho gamas preestablecidas para 16 a 6000 10 a 1000 metros de los pies, o 5 a 500 as
• Cambio caminada de la gama a partir de la 0 a 6000 pies, a 2000 metros, o a 1000 brazas gama de 12000 pies, de 4000 metros, o de 2000 brazas
de M/Z, 5 a 200 metros, o 2 a 120
eriores continuos
os de Nav a elegir de: Alfanumérico, gráfico 1 o gráfico 2
• Uso simultáneo o independiente del LF y del HF con controles individuales del aumento • Zumbido triple, Fondo-cerradura del LF o del HF, zumbido inferior, o zumbido del marcador • Dos modificaron modos de funcionamiento para requisitos particulares como seleccionado
User-1 o User-2
r del 10.4"
pies de los barcoslos pescados del estado plus ultra ofrece una
a del color TFT LCD del 10.4"que presente cuadro notable agudo y brillante. El FCV1100
vfácilmente fijado. Tambiénli
den seleccionar fácilmente de una ama de frecuencias.
FCV1100 ofrece una variedad de los modos de exhibición incluyendo el LF, HF, LF y HF,
acterísticas de Estándar
• 10,4 color LCD, opinió
rasante • Transmisor "Automóvil-que empareja" a los transducto
del puente para otros • Visión del día o de la noche usando e• Blancos en hasta 16 colores, correspondiendo a la intensidad del eco
braz
• Cambio máxima de la• 16 a 600 pies de las gamas independientes de B/L y
brazas • Selección independiente de la gama en el modo dual-frequency• Cambio automática de la gama para la adquisición y seguir inf• Tres exhibiciones de dat• Características Avanzadas De la Detección De los Pescados

142
para identificar los pescados pequeños, especie de los pescados así como pescados cerca del fondo
ia de la Tri-pantalla, LF solamente, HF solamente, y mezcla de LF / HF
• El LF y el HF preestablecieron los controles del alboroto, menú fijado con los ajustes
HF preestablecieron controles de TVG, el menú fijado para el nivel de TVG y la distancia eficaz
el fondo al blanco para la detección inferior
ad y marcador vertical del acontecimiento
s con la helada del modo o del cuadro de la
transductores de solamente 50
mperatura del agua con la exhibición numéric l color y de la calibración *
3.3.1 El rada electrónico que permite detectar objetos fuera del alcance de la vista y deterradar corresponde a las iniciales de "radio detection and ranging", y fue utilizado por las fuerzas aliadas durante la II Guerra Mundial para designar diversos equipos de detección y para fijar posic denominado objetivelocidhoy s , la det Desarr Todo ite un haz de ra ida entre algunos centímetros y cerca de 1 m. Los objetos que se hallan en la trayectoria del haz reflejan las on de las on electr
• Uno-Alcance
• exhibición de la mezcla de la frecuenc
estándares, lineares o de encargo • El LF y el
• La exhibición blanca del marcador o de línea, fijóde los pescados
• Los alarmar audibles y visuales, seleccionan para los pescados, el fondo, los pescados en fondo, o la temperatura *
• Marcador variable horizontal de la profundid(NMEA TLL hecho salir *)
• Velocidad del avance del cuadro de ocho pasovelocidad de la nave.
• operación de 75 kilociclos usando Furuno específico kilociclos
• Gráfico de la te a en menú de
3.2.2 Manual de operación de la Video sonda 3.3 Radar
Funcionamiento del Radar
r es un sistema minar la distancia a que se encuentran proyectando sobre ellos ondas de radio. La palabra
iones. No sólo indicaban la presencia y distancia de un objeto remoto, vo, sino que fijaban su posición en el espacio, su tamaño y su forma, así como su
ad y la dirección de desplazamiento. Aunque en sus orígenes fue un instrumento bélico, e utiliza ampliamente para fines pacíficos, como la navegación, el control del tráfico aéreoección de fenómenos meteorológicos y el seguimiento de aeronaves.
ollo
s los sistemas de radar utilizan un transmisor de radio de alta frecuencia que emdiación electromagnética, con una radiación de longitud de onda comprend
das de nuevo hacia el transmisor. El radar se fundamenta en las leyes de la reflexióndas de radio, implícitas en las ecuaciones que controlan el comportamiento de las ondasomagnéticas, planteadas por el físico británico James Clerk Maxwell en 1864

143
Func Las ocompu misor, una antena, un receptor y un indicador. A diferencia de la radiodtransm hallarse juntos. El transmisor emite un haz de ondas electren la dirección deseada. Cuando las ondas chocan con un objeto que se halla en la trayectoria del haz, aseñal y la envía al receptor. Mediante un proceso de amplificación y tratamiento informático el recepcompu Transm
ionamiento
ndas de radio se desplazan a 300.000 Km. la velocidad de la luz. Los equipos de radar están estos por un transifusión, en la que el transmisor emite ondas de radio que son captadas por el receptor, los isores y receptores de radar suelen
omagnéticas a través de una antena que concentra las ondas en un haz coherente apuntando
lgunas se reflejan y forman una señal de eco. La antena capta la energía contenida en dicha
tor del radar genera una señal en el dispositivo de visualización, por lo general una pantalla de tadora.
isores
El funcionamiento del radar implica que el transmisor emita una cuantifi ínima fracción (una billonésima de una billonéde eco. Una forma de solucionar el problema de detectar este eco ínfimo en presencia de la enorme señal emitida es
Pantalla del radar
lapso de 0,1 a 5 microsegundos se emite un impulso de energía; a continuación, el nte un espacio de centésimas o milésimas de microsegundo.
te
1 kHz. Si el radar está diseñado de forma que rechace aquellos ecos que poseen la misma
el transmisor y sólo amplifique los de frecuencia distinta, únicamente visualizará
nor.
gran cantidad de energía para recibir, detectar y car una msima) de toda la energía de radio devuelta en forma
el sistema de impulsos.
urante un D
transmisor permanece en silencio durauran la fase de impulso, o emisión, el receptor queda aislado de la antena por medio de un D
conmutador TR (transmisor-receptor); durante el periodo entre impulsos, esta desconexión se efectúa con un conmutador ATR (anti-TR). El radar de onda continua emite una señal continua, en vez de impulsos. El radar Doppler, que se utiliza a menudo para medir la velocidad de objetos como un coche o una pelota, transmite con una frecuencia constante. Las señales reflejadas por objetos en movimiento respecto a la antena presentarán diferentes frecuencias a causa del efecto Doppler. La diferencia de frecuencias guarda la misma relación con la emitida que la existente entre las velocidades del objetivo y la de la luz. Un objetivo que se desplaza en dirección al radar con una velocidad de
79 km/h altera la frecuencia de un radar de 10-cm (3.000 MHz) exactamente en 1receptor del
ecuencia que frlos objetivos móviles. Tales receptores pueden seleccionar vehículos en movimiento en total oscuridad, como hace la policía para medir la velocidad de los automóviles. El radar de frecuencia modulada (FM) emite una señal continua cuya frecuencia va cambiando de manera uniforme. La diferencia entre la frecuencia del eco y la del transmisor en el momento de la recepción de aquél permite calcular la distancia existente entre transmisor y objetivo.
stos sistemas son más exactos que los de impulsos, aunque tienen un alcance meE

144
objetivos, la velocidad y la posición se pueden sobreponer a un mapa con la presentación de carreteras u otras características importantes. Ciertos radares aéreos o en
rocesan las señales que retornan de tierra y proyectan un mapa de alta solución del terreno. A menudo se pueden reconocer objetos tan pequeños como un camión a
eteorológicas adversas. La mayoría de radar son consecuencia de los de alta velocidad.
mas primarios y funcionan sobre el sivo procedente del objetivo. Hay otro grupo de equipos de radar,
bas sta del
Antenas Las antenas de radar tienen que ser muy directivas; es decir, tienen que generar un haz bastante estrecho. Como la anchura del haz es directamente proporcional a la longitud de onda de la radiación e inversa a la anchura de la antena, y dado que no resulta viable utilizar antenas grandes en las unidades móviles de radar, surgió la necesidad de construir el radar de microondas. Pantallas de radar Las pantallas modernas de radar recuerdan a los complejos visores de los videojuegos. La detección de reórbita espacial prevarios kilómetros de distancia, de noche y en condiciones mde los últimos avances en cuanto a pantallas y procesos adelantos en el mundo de las computadoras y la electrónica Sistema secundario de radar Los sistemas de radar descritos reciben el nombre de sisteprincipio de un eco paconocidos globalmente como sistemas secundarios, que se o
an en una respuebjetivo; la mayoría de estos equipos se utilizan en la navegación y en la comunicación.
3.3.2 Manual de operación del Radar 3.4 Radio VHF marino 3.4.1 Funcionamiento del Radio VHF marino
Cursos de Radio-VHF

145
.4.2 Manual de operación del Radio VHF marino
.5.2 Manual de operación del Radio HF
. Navegación con embarcaciones para pesca deportiva y recreativa
3 3.5 Radio HF. 3.5.1 Funcionamiento del Radio HF 3 4 4.1 Esfera terrestre
Líneas imaginarias en la esfera terrestre

146
Proyección cilíndrica
Proyección cónica
Proyección plana

147
4.1.1 Definición de: ejes, polos, ecuador, paralelos, meridianos, latitud y longitud. Eje: es el diámetro alrededor del cual gira la tierra. Polos: son los extremos del eje de la Tierra: Norte y Sur. Ecuador: es la circunferencia máxima perpendicular al eje de la Tierra, y divide a ésta en dos hemisferios: Norte y Sur. Meridianos: son circunferencias máximas que pasan por los Polos, perpendiculares al ecuador. Paralelos: son circunferencias menores paralelas al ecuador. Especial atención merecen el Trópico de Cáncer al Norte, el Trópico de Capricornio al Sur, el Círculo Polar Ártico y el Círculo Polar Antártico. Meridiano cero: al objeto de tomar punto de partida o de origen de la medición de los meridianos se adoptó universalmente el que pasa por el observatorio de Greenwich (Primer Meridiano, Meridiano de Greenwich o Meridiano Cero). Meridiano del lugar: es el meridiano que pasa por el punto en que nos encontramos. Las dos semicircunferencias del meridiano divididas por los polos se llaman meridiano superior (en el que nos encontramos) y meridiano inferior o antimeridiano.
Principales ejes de la tierra

148
Distribución de la radiación solar sobre la superficie de la tierra
dor y puede ser Norte (N) o Sur (S), y
180º Este (E) u Oeste (W) del primer eridiano
Latitud: es el arco de meridiano del lugar contado desde el ecuador hasta el paralelo del lugar. u símbolo es "l" minúscula. Se mide a partir del ecuaS
nunca tendrá un valor superior a 90º. Longitud: es el arco de ecuador contado desde el meridiano de Greenwich hasta el meridiano del lugar. Su símbolo es "L" mayúscula. Sus valores van de 0º a m
Representación de la latitud y longitud

149
4.2 Compás magnético Descripción: es una aguja imantada que tiende a señalar una misma dirección magnética. Está constituida básicamente por una serie de imanes. Rosa: disco ligero donde se sitúan los imanes y que tiene grabados los 360º del horizonte. Capitel y Estilo: en el centro de la rosa hay una hendidura (capitel o chapitel) donde se apoya sobre la punta del estilo que permite el giro horizontal. Motero: la caja metálica con tapa de cristal, que contiene todo el conjunto, que descansa sobre un sistema de suspensión llamado Cardan y que normalmente va lleno de agua destilada y alcohol. Línea de fe: ma
Ha de ser visible en todo momento para el timonel.
.2.1 Uso del compás magnético El compás de a bordo es como la de bolsillo, aunque de mayor tamaño y más complicado. Está montada en un soporte de metal (bitácora), que acostumbra a llevar una capucha de bronce, con un ventanillo de vidrio que protege el instrumento. A veces, en el interior de la capucha, una sirve para iluminarlo de noche. Las partes móviles de un compás se hayan dentro de un cuenco, colocado en suspensión en la bitácora, para compensar el balanceo y el cabeceo del buque. Metida en el cuenco, sobre un pivote central, está la escala o Rosa de los vientos. En la brújula marina se mueve la escala, no la aguja magnética. Debajo de la rosa de los vientos existen saetas o haces de alambres de acero imantado dentro de los tubos de bronce. Tienen la misión de mantener el norte de la escala en dirección del norte magnético. La parte alta del cuenco muestra una raya vertical (línea de fe) paralela a la quilla del barco. El punto o cifra de la rosa de los vientos próxima a ella señala la dirección del buque. Rosa de los vientos: o rosa náutica divide el horizonte en 32 partes iguales.
a primera división son los Rumbos Cardinales: N-0º E-90º S-180º W-270º Divididos por la mitad se obtienen los Rumbos Cuadrantales: NE-045º SE-135º SW-225º NW-315º
rca que indica la línea proa-popa (crujía).
Bitácora: soporte en el que va colocado el motero. Instalación: es conveniente instalarlo en la línea de crujía, de esta forma la línea de fe indicará a dirección proa-popa correctamente.l Perturbaciones: la aguja está sujeta a perturbaciones debidas a campos campo magnético diferentes al terrestre como son objetos metálicos, aparatos eléctricos y tormentas eléctricas. 4
L

150
obtener los Rumbos Octantales: Estos se dividen a su vez para NNE-22º30' ENE-67º30' ESE-112º30' SSE-157º30' SSW-202º30' WSW-247º30' WNW-292º30' NNW-337º30' Finalmente se vuelven a dividir para obtener finalmente las Cuartas con un valor de 11º15'.
División del compás magnético
Compás magnético

151
l lugar y la dirección de la aguja, el ángulo entre los dos se denomina esvío (∆). Puede ser positivo (NE) o negativo (NW).
ablilla de desvío: es la relación, realizada por un profesional, de los desvíos en cada 15º de mbo.
Cada barco debe de portar su tablilla de desvío, dado que este valor varia de un compás a otro. Un compás magnético se puede desviar al contacto con objetos de hierro, no obstante, una forma practica de identificar este desvío y así poder aplicar una corrección, es localizando la estrella polar en noches despejadas y oscuras, alineando el compás con esta estrella, esta es una lectura aproximada, pero útil y practica. 4.3 Husos horarios En la vida cotidiana llevamos un tiempo civil, estando esta hora civil del lugar de acuerdo con los movimientos del sol verdadero. Pero si nuestros relojes marcasen la hora civil local, los lugares de diferente longitud marcarían una hora distinta y al navegar tendríamos que estar cambiando la hora continuamente (Siempre que variase la longitud).
n una nación, abría en cada instante muchas horas diferentes, para eliminar este gran conveniente, los principales estados han adoptado el convenio de usos horarios por el cual se
divide la tierra en 24 zonas o usos, por medio de meridianos equidistantes, llamados usos horarios, los cuales tienen una amplitud n el ecuador de 15 ° (1 hora ) de longitud. Los husos horarios se representan por la letra Z y se numeran de 0 a 12 hacia el E y W teniendo signo de las longitudes (positivos los usos al W y negativos al E). El huso central es el huso 0 y queda dividido en dos partes iguales por el meridiano superior de Greenwich, esta limitado por los meridianos de longitudes 7°-30’ (30minutos) W y 7°-30´ (30 minutos) E. El huso + 1 esta comprendido entre los meridianos de longitudes 7°-30’ W y 22°-30’W (30m y 1h
–30m); el Z = +2 esta comprendido entre los meridianos de longitud 22°-30’W y 37°-30’W ( o sea entre 1h –30m y 2h –30m) y así sucesivamente. Todos los lugares que se encuentren en el mismo uso horario enen por este convenio, la misma hora, a la cual se le nombra ho
4.2.2 Desvío del compás magnético Desvío de la aguja: al producirse perturbaciones magnéticas sobre la aguja no coinciden el meridiano magnético ded Tru
Ein
vira legal.

152
Tiempo universal
Representación grafica de un Huso horario
Husos horarios

153
Valor en grados de los husos horarios
4.3.1 Tiempo universal El tiempo medio de Greenwich (T.M.G) es normalmente usado como tiempo universal (T.U.). Se llama tiempo universal al tiempo civil referido al meridiano de Greenwich. Es decir, esta regulado por el sol medio pero tomando como origen el meridiano inferior de Greenwich. La hora civil de Greenwich (HcG). Es el tiempo que ha transcurrido desde que el sol medio pasó por el meridiano inferior de Greenwich. La HcG también se representa por T.U. Hemos dicho que en mismo instante todos los lugares de distintas longitud tienen una hora civil del lugar (HcL) diferente, pero en cambio tendrá la misma HcG ya que se cuenta desde el mismo meridiano (meridiano de Greenwich), por ello, como Tiempo verdadero (T.V) y es con la que entra en el almanaque náutico para uso de los navegantes. 4.3.1 Hora civil local El día civil como todos, se divide en 24 horas a los cuales se les llama horas civiles. Se llama hora civil del lugar (HcL), el tiempo que ha transcurrido desde que el sol medio pasó por el meridiano inferior del lugar. Por contarse desde el meridiano inferior de lugar, cada meridiano tendrá una HcL diferente; como los meridianos varían con la longitud del observador, los lugares de longitudes diferentes tendrán en un mismo instante horas civiles de lugar diferente.

154
4.4 Cartas de navegación 4.4.1 Tipos de cartas de navegación Se llama carta náutica al documento que reúne las informaciones necesarias para permitir una navegación marítima, fluvial y lacustre segura; indicando para ello las profundidades del agua, naturaleza del fondo, altura, configuración y características de la costa, peligros y ayudas a la navegación, entre otras cosas. El objetivo de una carta determina la escala a la cual será elaborada, expresándose esta por la razón matemática entre las dimensiones lineales de la carta y sus correspondientes terrenos. Normalmente, las escalas naturales o numéricas son múltiplos de 5.000, ajustándose a las “Resoluciones Técnicas y Especificaciones Cartográficas de la Organización Hidrográfica Internacional”. La cartografía náutica de la Dirección General Adjunta de Oceanografía, Hidrografía y Meteorología utiliza proyección Mercator. Las cartas náuticas están destinadas a satisfacer principalmente las siguientes necesidades: • Ayuda, información y seguridad a la navegación • Navegación por rutas comerciales • Navegación e información de áreas de pesca • Navegación e información de rutas turísticas • Divulgación de informac de los intereses marítimos
e la nación mación base de estudios científicos y técnicos de desarrollo nacional.
Base de difusión de materias de índole educacional
ión náutica que contribuya a la difusiónd• Utilización como infor• General: las cartas náuticas son planos o mapas utilizados para la navegación. Tipos de cartas: Tabla 5. Cartas en función de su escala.
Cartas en función de su escala
Punto Carta Escala Uso
General 1/30.000.000 a 1/3.000.000 Navegación oceánica Menor
Arrumbamiento 1/3.000.000 a 1/200.000 Rumbos directos
Navegación costera 1/200.000 a 1/50.000 Navegación con la costa a la vista
Aproches o recalada 1/25.000 Aproximación a puertos u otros puntos de la costa
Mayor
Portulanos < 1/25.000 Puertos, fondeaderos u otros detalles de la costa

155
Índice catalogo de cartas náuticas
.4.2 Rumbos
umbo: es el ángulo formado por la línea proa-popa con el meridiano del lugar o con el norte. que nos referimos el rumbo será verdadero (geográfico), magnético o de
guja.
Por Grados: se mide de 000º a 360º en el sentido de las agujas del reloj.
adr se miden de 00º e cuentan a partir del N acia el E y W. Se expresan
Conversio De cuadra
cuaSegundo cuadrante: S45E = 180º - 45º = 135º. Tercer cua = 180º +Cuarto cua W = 360º -
4 RSegún el norte al a
Por Cu antes: a 90º y s o S hdiciendo N o S el número de grados desde este rumbo hacia el E o el W, por ejemplo, S80W.
nes
ntal a circular
Primer drante: N45E = 045º.
drante: S45Wdrante: N45
45º = 225º. 45º = 315º.

156
De circular al cuadrantal Primer cuadrante:
45E. Tercer cuadrante: W.
45W.
Sistema de medición de rumbos. Noción elemental del magnetismo terrestre
l magnetismo es la propiedad r ciertos metales. La Tierra se omporta como un gran imán esférico permanente, por lo que un imán que gira libremente se
pectivos polos magnéticos de la Tierra, que no coinciden exactamente con los
oincidir los polos geográficos con los polos magnéticos, existe una diferencia entre el los dos se denomina
(-).
rla: para obtener la dm de un determinado lugar para una fecha concreta basta los datos de la declinación que en ella se incluyen. Para corregirla
rmula:
45º = N45E. Segundo cuadrante: 135º = 180º - 135º = S
225º = 225º - 180º = S45Cuarto cuadrante: 323º = 360º - 323º = N
Ec
que tiene el imán de atraer o repele
orienta hacia los reseográficos. g
Declinación magnética Al no cmeridiano geográfico y el meridiano magnético del lugar, el ángulo entredeclinación magnética (dm). La dm puede ser hacia el NE (+) o hacia el NW Variación local: el valor de la dm es distinto para cada punto de la Tierra y va variando con el tiempo. La dm para un determinado lugar de la tierra se denomina Variación Local. Cc
ómo actualizaonsultar la carta y obtener
utilizaremos la siguiente fó

157
m = Variación Inic Anual * Número
3 obtendremos: dm = -4º25' + (+8' * 9) = -4º25' grados y décimas de grado)
Declinación magnética y desvío
Ct = (±dm) + (±∆)
= -7º + +3º = -4º
d ial + (± Variación Años) Si la carta indica 4º 25 W 1994 (8' E), para el 200+ (+1º12’) = -3º13' = -3,2º (lo expresamos como
Corrección total Cálculo a partir de la declinación y el desvío: es la suma algebraica (cada uno con su signo) de la declinación magnética y el desvío.
Si dm=7ºW y ∆=3ºE, Ct Norte: Norte verdadero: es el norte geográfico. Norte magnético: es el marcado por el polo magnético y tiene una declinación sobre el norte verdadero. Norte de aguja: es el que marca la aguja de abordo y tiene un desvío sobre el norte magnético.

158
Tipos de rumbos
Ubicación del norte magnético y norte geográfico.
e rumbo
ue forma la dirección de la proa con el meridiano erdadero del lugar. Es el que obtenemos en la carta de navegación.
gnético: (Rm) es el ángulo que forma la dirección de la proa con el meridiano agnético del lugar.
Rumbo de aguja: (Ra) es el ángulo formado por la dirección de la proa con la línea N-S de la aguja. Es el que obtenemos de la observación de la rosa magnética de abordo. Relación entre ellos: Para manejar las relaciones entre los distintos tipos de rumbos se utiliza la siguiente fórmula genérica: Rv = Ra + (±dm) + (±∆)
Clases d Rumbo Verdadero: (Rv) es el ángulo qv Rumbo mam

159
Esta fórmula se puede desplegar con las siguientes combinaciones: Tabla 6. Formula de conversión de rumbos
Conocemos
Rv Ra Rm
Rv = Rv = Ra + (±Ct) Rv = Rm + (±dm)
Ra Ra = Rv - (±Ct) = Ra = Rm - (±∆)
Obtenemos
Rm Rm = Rv - (±dm) Rm = Ra + (±∆ = ) 4.5 Navegación 4.5.1 Estima La navegación por estima es cuando tenemos en cuenta todos los rumbos y todas las distancias navegadas por la embarcación, hasta llegar a una nueva posición. La palabra estima implica por si misma “aproximación”. Así la situación que se dice estimada es aproximada, no exacta, ya que no podeos mantener perfectamente un rumbo, ni tampoco podemos medir exactamente las distancias navegadas. La navegación de estima permite que los marinos calculen su posición sin observar el Sol ni las estrellas. Resuelven el rumbo del buque desde el último punto conocido y la distancia que ha recorrido. Con cartas de las corrientes y los instrumentos de medición de los vientos, efectúan las correcciones que exigen dichos factores. Después calculan de m nes emplean también
. Es mucho menos preciso que los métodos en que intervienen la amento y el empleo del cronómetro; pero resulta rápido y útil.
odo amplio la nueva po ición. Los pilotos de avioseste procedimiento
bservación del firmo Esta navegación se hace siguiendo loxodrómica, ya que el rumbo forma ángulos iguales con los
eridianos. m

160
Línea loxodrómica
4.5.2 Costera La navegación costera, también llamada navegación de cabotaje, es la que se realiza a la vista de la costa, utilizando referencias de la misma para, con su ayuda, trazar líneas de posición. La mayor parte de la navegación deportiva y de recreo, se desarrolla en este ámbito. Con este
emoras y marcaciones permiten al patrón hallar su situación en la carta a la vista de la costa. Podrá trazar el rumbo a su destino, con las correcciones oportunas, teniendo en cuenta: vientos y corrientes. Aunque la navegación costera es fácil, requiere en cambio, grandes precauciones y mucha vigilancia, pues cualquier descuido puede causar la perdida del barco por navegar cerca de la costa, que, es donde los bajos y otros accidentes, serán frecuentes, así como estar alerta para gobernar a los numerosos buques que se encontrarán en esas aguas. Un pequeño error en el rumbo navegando en alta mar, no tendrá importancia y todo consistirá en hacer una recalada peor, en cambio, ese mismo error en un rumbo navegando cerca de la costa puede ser fatal.
espíritu se creo, hace ya tiempo, el titulo de patrón de yate, con atribuciones para mandar embarcaciones de recreo hasta 60 millas de la costa. D

161
Líneas de posición
4.5.3 Electrónica. Navegación Electrónica Este método de navegación se basa en el uso de equipos y sistemas en los que las ondas de radio y las técnicas electrónicas se utilizan para poner en una carta la posición y la ruta de un navío. La ayuda electrónica y la precisión en la mayoría de los casos han incrementado la seguridad de la navegación suministrando información importante rápidamente en periodos de baja visibilidad. El navegante moderno hace hoy gran uso de estos dispositivos. La radio proporciona al navegante información auxiliar, que incluye las señales horarias de radio, los informes meteorológicos, los anuncios de tormentas y los anuncios de navegación general con respecto a los riesgos de colisión que suponen aviones en tráfico. La radio como ayuda a la navegación fue utilizada por primera vez a comienzos del siglo XX en barcos. Los aviones fueron equipados en la década de los treinta con instrumentos de comunicaciones para

162
recibir la dirección de navegación desde la Tierra y tomar la dirección a partir de los transmisores de superficie. La ayuda en la navegación moderna consiste en indicar la dirección de radio utilizada en una de las siguientes formas: un avión toma la dirección a partir de transmisores instalados en el suelo y fija su posición relativa a dos o más transmisores, o toma la dirección mediante estaciones terrestres en una transmisión que desde un avión se correlacionan a un centro, lo que establece la posición del aparato. Los principales mecanismos y sistemas electrónicos se describen a continuación. Radiofaro direccional Los radiofaros direccionales y los D/F fueron la principal ayuda de la radionavegación antes de la II Guerra Mundial. Operan en bajas frecuencias (200 a 415 kilohercios) por lo que están sujetos a desviaciones, por efecto de la noche, y otras anomalías. Un radiofaro direccional consta de dos pares de antenas de transmisión en código Morse, una transmisión de la letra A (punto, raya), y la otra transmisión de la letra N (raya, punto). El tiempo de las dos letras es tal que el espacio entre ellas sólo iguala al tiempo de una raya, mientras que el espacio entre las dos partes de una letra equivale al tiempo de un punto. Las formas se entrelazan así hasta que si ambas son oídas a la vez, el sonido es continuo. La forma de transmisión desde cada par de antenas es direccional, y se proyecta dentro de dos 'cuadrantes' opuestos, cada uno de los cuales cubre 90 grados. Un avión en uno de los cuadrantes oirá solo una letra única, o A o N; sin embargo, si está en la línea de separación entre los dos cuadrantes, el navegante oirá el tono continuo, que se llamará señal en curso. Esta línea de separación se llama el haz, y suele estar sobre los 3° de ancho.
se oye ninguna señal. Este área se ncio y es pequeña en altitudes bajas, pero su tamaño se incrementa en
liza es una estación de radio equipada con una antena no direccional; se usa
Directamente sobre el alcance hay un área donde no denomina cono de silealtitudes más elevadas. Radio balizas Una baprincipalmente para dar la dirección por radio. Las balizas de poca potencia se denominan localizadores y se utilizan en conjunción con las brújulas de radio.
• CARTOGRAFÍA DIGITAL - Formatos Raster y vectorial - Cartas Náuticas digitales
• SISTEMAS DE SATÉLITES - GPS (Global Positioning System)

163
marras: son los cabos o cables utilizados para sujetar (amarrar) el barco a un muelle.
a por el través, perpendicular a la línea de proa-popa. Hay en proa, opa y en algunos casos de centro.
sprín: amarra que, partiendo de la proa o de la popa, llama hacia popa o hacia proa a sesgada. Hay de proa (amarrado a proa va hacia popa) y de popa
marrado a popa va hacia proa).
4.6 Maniobras de atraque y desatraque en muelles A Largo: amarra que llama de forma sesgada, hacia proa o hacia popa, por la amura o por la aleta en dirección al muelle. Hay largo de proa y largo de popa. Través: amarra que llamp Erespectivamente, de form(a Codera: amarra por el costado contrario al muelle donde estamos atracados normalmente a un muerto o pilote.
Tipos de amarres
Efectos:
Tabla 7. Procesos de maniobras. Largo de proa atraca la proa y movimiento avante " de popa atraca la popa y movimiento atrás T atraca el través ravés de proa " traca el través de popa aE traca la proa y movimiento atrás sprín de proa a" atraca la popa y movimiento avante de popa

164
la obra uerta se denomina abatimiento. Dependiendo de la forma de la obra muerta y la dirección
se alejado cualquier peligro que esté a sotavento y tener spacio de maniobra suficiente a esta banda.
el viento que existe en un momento dado. Se notará en una embarcación sin rrancada.
Viento aparente: en cuento tengamos arrancada el viento que notaremos a bordo será la resultante, tanto en dirección como intensidad, del viento real y el viento originado por la velocidad del barco.
Agentes que influyen en la maniobra Viento: el desplazamiento lateral de la embarcación por la acción del viento sobre mdel viento también es posible que la embarcación tienda a orzar (cerrarse hacia barlovento) o arribar (abrirse hacia sotavento). Corriente: el desplazamiento lateral de la embarcación por acción de la corriente sobre la obra viva se denomina deriva. Olas: afectan sobre el conjunto de la embarcación dificultando las maniobras. Libre a sotavento: es mantenere Viento real: es a
Agentes que influyen en la maniobra
4.6.1 Viento e perpendicu elle Atracar: el ángulo de ión Se amarrarán primero el largo y el esprín de proa, después el largo de popa. Desatracar: existen varias alternativas, el viento nos favorece soltar las amarras dejando el esprín de popa y una vez abiertos salimos de proa.
Con viento de tierra.
d lar al mu hacia el mar:
aproximac será de 60º-70º.
la maniobra. Se puede

165
o de proa y después el de popa
.6.3 Con corriente
a y luego el largo de popa. esatracar: se sitúa una defensa a proa, se deja el esprín de proa y se hace cabeza sobre la
de popa paralelo al muelle:
Atracar: se realizará una aproximación con muy poco ángulo (20º). Se amarrará primero el esprín de proa, luego el largo de popa y después el de largo de proa. Desatracar: se sitúa una defensa a proa, se deja el esprín de proa y se hace cabeza sobre la defensa abriendo la popa. 4.6.4 Con viento y corriente. Utilización según viento y corriente:
Maniobra con viento y co
Desatracar la proa Desatracar la popa
4.6.2 Con viento de mar Viento de perpendicular al muelle hacia el muelle: Atracar: el ángulo de aproximación será de 40º-50º, dejando que le viento nos acerque al muelle. Se amarrará primero el larg Desatracar: se sitúa una defensa a proa, se deja el esprín de proa y se hace cabeza sobre la defensa abriendo la popa. 4 Corriente de proa paralelo al muelle: Atracar: se realizará una aproximación con muy poco ángulo (20º). Se amarrará primero el largo de proDdefensa abriendo la popa. Se aleja marcha atrás. Corriente
rriente
Viento o corriente de proa
dejaremos el esprín de popa
dejaremos el largo de proa

166
Desatracar la proa Desatracar la popa
Viento o corriente de dejaremos el largo de popa.
dejaremos el esprín de proa
popa
Si el viento es muy fuerte de fuera: daremos una codera o dos a una boya, muelle o barco y las viraremos (cobraremos).
. 4.7 Maniobras de remolque 4.7.1 Con buen tiempo y mal tiempo Maniobra de aproximación: siempre se debe hacer como poca arrancada, procurando que el buque que lance las amarras quede a barlovento de quien las reciba. En el caso de que el
uque que remolque sea mucho mayor que el remolcado, se puede aprovechar el socaire de osible la aproximación se puede utilizar una boya para
cercar las amarras del remolque.
r absorber los tirones. La ngitud de cabo será mayor conforme el mar esté peor. Las amarras deben amarrarse a
Forma de navegar el remolcador y el remolcado: los cambios de rumbo deben ser suaves
a dor para describir un círculo en la maniobra y mantener tensas s amarras. Los cambios de velocidad deberán ser muy suaves, sobre todo con las amarras sin
s. Se deben vigilar las amarras y los puntos de amarre.
beste para facilitar la maniobra. Si no es pa Dar y tomar el remolque: las amarras deben ser resistentes y podelopuntos muy fuertes y seguros abordo.
(10º). El remolcado ha de gobernar tratando de seguir aguas al remolcador, pudiendo dar timón a la b nda contraria del remolca
latensión, y no deben superar los 10 nudo

167
DIX ión c info. DIRECCIÓN GENERAL DE ORGANIZACIÓN Y CAPACITACIÓN PESQUERA. 1982. Navegación (Manual de capacitación). DGOCP. México, D. F. VILLAR, S. O. Astronomía náutica y navegación para Capitanes de Yate. FIGUERAS, M. 1992. Señales en la mar. Editorial Noray. Barcelona, España.
AQUERO, R. J. 2002. Navegación costera. Ediciones pirámide. Madrid, España.
BIBLIOGRAFÍA
ON, C. 1985. Navegac ostera básica. Editorial paran Madrid, España.
V

168

Dr. Reyes S. Tamez GuerraSecretario de Educación Pública
Dra. Yoloxóchitl Bustamante DíezSubsecretaria de Educación Media Superior
M. en C. Daffny Rosado Moreno Secretario Ejecutivo del COSNET
Biól. Francisco Brizuela Venegas Director General de Educación en Ciencia y Tecnología del Mar
M. en C. Gildardo Rojo SalazarDirector Técnico
Ing. Heriberto Nolasco HerediaDirector de Operación
C.P. María Elena Colorado ÁlvarezCoordinadora Administrativa
Primera edición: 2005.
Ilustración de portada y portada posterior:El agua, origen de la vida (detalle), de Diego Rivera, 1951.
SUBSECRETARÍA DE EDUCACIÓN MEDIA SUPERIOR