tesi di laurea modellazione del comportamento termico ... sommario lo scopo di questa tesi è quello...
TRANSCRIPT

UNIVERSITA’ DEGLI STUDI DI UDINE
Facoltà di Ingegneria Corso di Laurea Specialistica in Ingegneria Meccanica
Dipartimento di Fisica
Tesi di Laurea
MODELLAZIONE DEL COMPORTAMENTO TERMICO DEGLI HALF STAVE DEL SILICON PIXEL DETECTOR
DELL’ESPERIMENTO ALICE
Relatore Laureando Prof. Francesca Soramel Michele A. Coppola
Correlatori Ing. Adriano Pepato Dott. Rosario Turrisi
Anno Accademico 2006/07


SOMMARIO
Lo scopo di questa tesi è quello di sviluppare un modello accurato agli elementi finiti per analizzare il comportamento termico di un generico half-stave, elemento base del rivelatore SPD (Silicon Pixel Detector), parte interna dell’ITS (Inner Tracking System) dell’esperimento ALICE situato al CERN (Centro Europeo per la Ricerca Nucleare) a Ginevra. ALICE è uno dei quattro grandi esperimenti in programma sull’LHC (Large Hadron Collider), l’acceleratore di particelle più potente costruito fino ad ora.
L’analisi è stata effettuata, come già accennato, sull’ half-stave: esso è costituito da dieci elementi base, ciascuno formato da un sandwich contenente il chip di lettura, il sensore, il bus per il trasporto dei segnali e la colla.
Le simulazioni consistono nel calcolare il campo termico che si sviluppa sull’half-stave stesso durante il suo funzionamento. Per fare ciò inizialmente è stato creato un modello per riprodurre le distribuzioni di temperatura misurate sperimentalmente sulla superficie esterna di un rivelatore specifico. Successivamente, cambiando le condizioni al contorno, ossia i parametri che influenzano lo scambio termico con il sistema di raffreddamento e la potenza dissipata nei chip di lettura, sono stati simulati alcuni possibili scenari di deterioramento del dispositivo, come ad esempio il degrado delle caratteristiche del grasso termico che consente ai chip di scambiare il calore dissipato con il fluido refrigerante. Nello sviluppo del modello sono state adottate delle semplificazioni sia sulla geometria che sulla fisica del problema. Sono state ad esempio trascurate le interazioni con il mondo esterno, ritenute trascurabili, come convezione naturale ed irraggiamento.
I risultati mostrano che il modello è capace di riprodurre alcuni casi particolari con disuniformità. Se ne deducono buone capacità predittive che verranno usate per prevedere il deterioramento, che non dovrebbe inficiare il corretto funzionamento del rivelatore. Si ha così uno strumento per l’analisi di eventuali comportamenti anomali futuri.


INDICE
Sommario Introduzione: L’esperimento ALICE ......................................................................pag. 1 - Generalità................................................................................................................... » 1 - Cenni di fisica dei quark........................................................................................ » 2 - Registrazione degli eventi..................................................................................... » 4 - Il rivelatore................................................................................................................ » 4 Capitolo 1: Il silicon pixel detector (SPD)..............................................................pag. 7 1.1 La struttura del rivelatore SPD....................................................................... » 7 1.2 La struttura dello stave...................................................................................... » 9 1.3 Il sistema di raffreddamento............................................................................ » 12 1.3.1 Funzionamento dell’impianto........................................................... » 13 1.3.2 Dati di progetto del sistema............................................................... » 16 Capitolo 2: Trasmissione del calore e FEM...........................................................pag. 19 2.1 Conduzione nello stato solido......................................................................... » 19 2.2 Convezione e determinazione del coefficiente α ...................................... » 23 2.3 Resistenze termiche, analogia elettrica......................................................... » 27 2.4 Evaporazione in convezione forzata.............................................................. » 29 2.5 Irraggiamento....................................................................................................... » 32 2.5.1 Radiazione di corpo nero................................................................... » 34 2.5.2 Superfici reali........................................................................................ » 35 2.5.3 Scambio termico radiativo................................................................. » 37 2.6 Metodo degli elementi finiti............................................................................ » 39 2.6.1 Metodo dei residui pesati................................................................... » 42 2.6.2 Metodo di Galerkin.............................................................................. » 44 2.6.3 Funzioni di forma................................................................................. » 47
Capitolo 3: Il modello .....................................................................................................pag. 53 3.1 Sviluppo del modello FEM di un half-stave ............................................... » 53 3.2 Tipo di elemento utilizzato.............................................................................. » 59 3.3 Alcuni esempi di simulazione del comportamento termico................... » 60
Capitolo 4: Simulazioni e risultati.............................................................................pag. 65 4.1 Confronto con i dati sperimentali................................................................... » 65

Indice
4.2 Previsioni del comportamento termico con deterioramento del grasso termico..................................................................................................................... » 83
Conclusioni.........................................................................................................................pag. 91
Bibliografia .........................................................................................................................pag. 93
Ringraziamenti

INTRODUZIONE: L’ESPERIMENTO ALICE • Generalità:
L’esperimento ALICE (A Large Ion Collider Experiment) è in funzione presso il CERN di Ginevra in attesa della produzione dei primi fasci dell’LHC.
LHC è situato in un tunnel circolare di 27 Km di circonferenza ad una profondità media di 100 m sotto al suolo, in parte francese ed in parte svizzero, nei pressi della città di Ginevra. É l’acceleratore di particelle più potente che sia mai stato costruito, capace di produrre collisioni ad un’energia di 14 TeV nel centro di massa dei nucleoni coinvolti nello scontro o di 5.5x208 TeV per ioni di piombo.
Figura 0.1: Vista aerea della zona ospitante l’anello dell’LHC.
ALICE, come ATLAS, CMS ed LHC-B, costituisce uno dei quattro esperimenti principali posti lungo l’anello dell’LHC. Il progetto è frutto della collaborazione di circa 1000 persone, fra ingegneri e scienziati, provenienti da 76 istituzioni in 27 nazioni diverse.

Introduzione
2
Figura 0.2: Vista in sezione della superficie terrestre dove è posto l’acceleratore LHC.
Lo scopo dell’esperimento è quello di studiare collisioni tra ioni di piombo, accelerati per mezzo di LHC, ad un’energia tale da poter separare i quark che formano i protoni e i neutroni presenti negli atomi coinvolti nella alla reazione. Di conseguenza si dovrebbe ottenere un plasma di quark e gluoni, che sono le particelle (bosoni) che trasportano la "forza forte", la quale tiene uniti i nuclei atomici ed i quark costituenti i nucleoni (protoni e neutroni).
Durante i primi istanti dell’universo, circa 10µs dopo il "Big Bang", la materia facente parte dell’universo si trovò in questo stato molto caldo e denso.
Per la prima volta nella storia, ALICE studierà approfonditamente questo stato della materia in cui i quark si comportano come particelle libere, e non legate come nelle osservazioni fatte fino ad oggi.
La scelta degli ioni di piombo è dovuta al fatto che più grandi sono i nuclei utilizzati più alta è la densità di energia che si ottiene, e di conseguenza si ha una maggior probabilità di produrre plasma di quark e gluoni. Infatti il piombo è tra gli atomi più massivi essendo formato da 208 particelle subatomiche fra neutroni e protoni. • Cenni di fisica dei quark:
La materia presente nell’universo odierno è costituita da atomi, i quali a loro volta contengono nuclei formati da protoni e neutroni circondati da “nuvole” di elettroni.
I protoni ed i neutroni sono composti da tre particelle più piccole, chiamate quark (detti “di valenza”), tenute insieme da altri quark (detti “del mare”) e da altre

L’esperimento Alice
3
particelle, i gluoni. La forza di legame è talmente forte da non permettere di separare i quark. Se si provasse a separare un quark da un adrone, ovvero una particella composta da essi, si otterrebbe un altro adrone.
La moderna teoria della forza “forte”, chiamata cromodinamica quantistica, prevede che ad altissime densità di energia i protoni ed i neutroni possono perdere la loro identità. Questo può avvenire a temperature 100000 volte più alte di quella del centro del sole, oppure a densità estreme come quelle esistenti nei nuclei delle stelle di neutroni, oggetti del diametro di alcuni chilometri aventi massa dell’ordine di quella del sole. In queste condizioni i partoni (quark e gluoni) non sono più confinati negli adroni e dunque formano uno stato della materia in cui sono liberi. Come già accennato si viene a creare un plasma di quark e gluoni (QGP – Quark-Gluon Plasma).
Il processo descritto è analogo ad altre transizioni di stato della materia, quali la fusione o l’evaporazione, come ad esempio nel caso in cui l’acqua allo stato solido si scioglie e diventa liquida a causa di un’assorbimento di calore, e poi eventualmente diventa vapore. Quindi si hanno caratteristiche come l’esistenza di una temperatura critica e di un ordine di transizione che si pensa di poter misurare.
Quando l’universo era molto caldo e denso, durante i primi stadi del Big Bang, la materia era sotto forma di plasma di quark e gluoni. Solo quando l’universo si è raffreddato scendendo al di sotto della temperatura critica questo plasma si è “congelato” e si sono formati per la prima volta gli adroni, come i protoni, i neutroni e di conseguenza i nuclei atomici. Basta immaginare di andare indietro nel tempo scaldando l’universo sempre di più fino ad arrivare alla temperatura critica per poi vedere il passaggio di stato e quindi vedere il plasma in questione.
Figura 0.3: Big Bang ed espansione dell’universo. La zona dello schema indicata con "Quark Soup" si riferisce al plasma di quark e gluoni.
Gli esperimenti i cui prodotti verranno rivelati con l’ausilio di ALICE mirano a ricreare questo plasma sotto forma di piccoli volumi ad alta densità di materia ed energia formatisi in seguito alla collisione tra nuclei pesanti, quali il piombo. Il rivelatore ALICE registrerà gli eventi che emergono dall’espansione e dal raffreddamento di queste piccole palle di fuoco, osservando come il plasma di quark e gluoni diede origine alla forma ordinaria della materia che riempie ora l’universo.

Introduzione
4
• Registrazione degli eventi:
Il plasma di quark e gluoni creato dalle collisioni tra nuclei si espande raffreddandosi fino a trasformarsi in materia ordinaria (adronizzazione). Si prevede la formazione di ~104 particelle, richiedendo la realizzazione di rivelatori traccianti estremamente performanti e di strumenti software all’avanguardia per l’analisi di una mole di dati senza precedenti [1].
Figura 0.4: Alcune istantanee dello sciame di particelle che si forma in seguito ad ogni collisione.
• Il rivelatore:
ALICE, nel suo complesso, è costituito da diversi rivelatori che utilizzano tecnologie differenti. Tali tecnologie sono adottate in funzione di diversi parametri quali:
- la varietà di particelle da rivelare; - l’intervallo di energia in cui si trovano, l’ordine di grandezza è tra i ~100
MeV ed i ~100 GeV; - il numero di particelle prodotte per evento, circa 104 nell’intervallo di angolo
solido coperto dal rivelatore. Uno degli aspetti più importanti della rivelazione è il tracciamento del percorso
seguito dalle particelle cariche e l’individuazione del loro punto di produzione

L’esperimento Alice
5
("vertexing"), così come del punto di collisione dei fasci. La ricostruzione di tale punto e dell’inizio della traccia viene realizzata tramite l’ITS (Inner Tracking System), che è un tracciatore e costituisce la parte centrale di ALICE.
Figura 0.5: Sezione dell’intero rivelatore ALICE. Misura 16m in altezza e 20 in lunghezza. In alto a destra è rappresentato l’ITS.
L’ITS è un insieme di tre rivelatori a simmetria cilindrica coassiale con il fascio costituito da sei strati, due per ciascun tipo di rivelatore. Questi rivelatori sono costruiti con tre diverse tecnologie, ognuna utilizzata per due strati adiacenti. Le tre tecnologie utilizzate, dal più interno al più esterno, sono:
- SPD (Silicon Pixel Detector); - SDD (Silicon Drift Detector); - SSD (Silicon Strip Detector).
Oggetto della tesi è lo studio del comportamento termico dei rivelatori a pixel di silicio che costituiscono l’SPD, cioè l’analisi delle distribuzioni di temperatura indotte dal carico termico sugli stave. A tal fine è stato utilizzato il codice commerciale ANSYS, un potente strumento per simulazioni numeriche basato sul metodo degli elementi finiti.
La tesi è strutturata in quattro capitoli: nel primo viene descritto il rivelatore SPD, il singolo stave ed il sistema di raffreddamento; nel secondo viene riportata una trattazione basilare di trasmissione del calore e la descrizione del metodo degli elementi finiti, con enfasi sulla soluzione dell’equazione della conduzione; nel terzo si descrive il modello e si riporta qualche esempio di risultati ottenuti dalle simulazioni; infine nel quarto capitolo vengono esposti e discussi i risultati delle simulazioni effettuate.

Introduzione
6

CAPITOLO 1 : IL SILICON PIXEL DETECTOR (SPD)
Nel capitolo corrente si riporta una descrizione dettagliata del Silicon Pixel Detector, seguita da un approfondimento sulle specifiche tecniche ed il funzionamento di un singolo stave, che si può considerare come elemento base della struttura del rivelatore. La comprensione del funzionamento e la conoscenza della struttura dello stave sono fondamentali per capire a pieno il lavoro che verrà svolto in seguito.
Inoltre, viene descritto in dettaglio l’impianto di raffreddamento, elemento di importanza fondamentale per il funzionamento del rivelatore.
1.1 La struttura del rivelatore SPD
Il rivelatore SPD è il rivelatore più interno di ALICE (figura 1.1). È costituito da dieci supporti in fibra di carbonio (CFSS – Carbon Fiber Support System) disposti con simmetria cilindrica attorno alla linea del fascio. Ogni CFSS supporta 6 piani di
rivelatori, chiamati stave, i quali a loro volta sono formati da due mezzi stave, o meglio half-stave. Su ogni CFSS, due stave si trovano sullo strato interno e quattro su quello esterno. Infatti il rivelatore intero ha uno strato interno, composto da 20 stave, posto ad una distanza radiale media dalla linea del fascio pari a 39 mm, ed uno strato esterno, comprendente 40 stave, posto ad una distanza radiale media di 76 mm. La lunghezza coperta dal rivelatore lungo la direzione del fascio è all’incirca di 286 mm.
Figura 1.1: Il rivelatore SPD dell’ITS.
L’ half-stave è l’entità elementare funzionale dell’SPD e, nell’intero rivelatore, ce ne sono 120.
Nella figura 1.2 si riporta un disegno in sezione del rivelatore SPD dove si può vedere come sono disposti gli stave nella maniera descritta sopra. La disposizione sui due piani è stata fatta in modo da ottimizzare l’angolo solido coperto dal rivelatore.

Capitolo 1
8
Figura 1.2: Sezione del rivelatore SPD. Si possono notare i dieci supporti in fibra di carbonio contenenti 6 stave ciascuno.
Nelle seguenti figure sono illustrati alcuni dettagli dei supporti CFSS.
Figura 1.3: Rappresentazione di un CFSS equipaggiato con i sei stave.

Il Silicon Pixel Detector (SPD)
9
Figura 1.4: Fotografia di un CFSS. Si possono notare le sei posizioni, due interne e quattro esterne, dove vengono posti i tubi di raffreddamento e gli stave.
I supporti in fibra di carbonio hanno uno spessore di 0.2 mm ottenuto dalla
sovrapposizioni di due strati da 0.1 mm di materiale composito. Le fibre di carbonio sono disposte parallelamente in ciascuno strato e ortogonalmente tra i diversi strati. La superficie esterna è rivestita con un deposito di parilene di 10 µm, il quale funge da isolante elettrico.
Nella zona sottostante ad ogni stave è posto un tubicino in phynox nel quale scorre il fluido di raffreddamento. Alle estremità di ciascun CFSS ci sono i collettori, uno per l’arrivo del fluido e l’altro per la ripresa, sui quali sono collegati i tubicini dei sei stave posti sul CFSS stesso [2].
1.2 La struttura dello stave
Ciascuno stave è composto da due half-stave di 143 mm di lunghezza, a sua volta formati da due ladder e da un modulo pilota. Un ladder è un parallelepipedo di silicio diviso in cinque unità, ciascune con 32x256 celle di dimensioni 50x425 µm. Ogni cella costituisce un pixel, cioè un unità elementare di rivelazione, ed è una giunzione pn. Su ognuna delle cinque unità del ladder è applicato un chip di lettura tramite una tecnica chiamata bump bonding. Esso collega ogni pixel del sensore ad ogni pixel del chip. Il modulo pilota (MCM – Multi Chip Module), situato all’estremità dell’half-stave, garantisce l’accoppiamento elettronico tra il rivelatore ed il sistema di acquisizione dei dati.

Capitolo 1
10
I ladder sono costituiti da più strati di materiali differenti (Fig. 1.4). Partendo dal basso si ha:
- il grounding foil, fatto di kapton e alluminio su due strati. Ha la funzione di isolare elettricamente il rivelatore dal supporto in fibra di carbonio. Ha uno spessore di 75 µm, 25 di alluminio e 50 di kapton; - i cinque chip di lettura, fatti di silicio, dello spessore di 150 µm e dimensioni 15.7x13.6 mm; - il bump bonding, che come già detto realizza il collegamento dei pixel dei chip con quelli del sensore; - il sensore, di silicio, spesso 200 µm con un area sensibile di 12.8x69.9 mm contenente 8192 pixel; - il bus per il trasporto dei dati e delle tensioni necessarie al funzionamento del rivelatore. E’ formato da strati alternati di colla, kapton ed alluminio con uno spessore totale di 280 µm. La figura 1.5 riporta i disegni di alcuni dei componenti di un half-stave.
Figura 1.5: Disegni tecnici dei componenti di un half-stave.
I collegamenti elettrici tra i chip di lettura ed il bus sono effettuati mediante il
wire-bonding. Tra i vari materiali costituenti il ladder ci sono degli strati di colla. Invece, al fine
di garantire un buon contatto termico, e di agevolare la trasmissione del calore tra i chip di lettura ed il tubicino del sistema di raffreddamento, è stato posto un grasso termico (thermal grease) nelle aperture effettuate nel grounding-foil. Infatti, il grasso

Il Silicon Pixel Detector (SPD)
11
termico non è steso su uno strato continuo, ma è messo su piccole aree poste in corrispondenza alle aperture del grounding-foil appena citate, dette pads e posizionati al di sotto di ogni chip in modo da evitare che il grasso termico fluisca da un chip all’altro rischiando di intaccare il bump-bonding. Durante il posizionamento dell’half-stave sul CFSS, il grasso termico viene compresso in modo da distribuirsi su tutta la superficie disponibile. Inoltre, con questo sistema è anche possibile compensare la non planarità, sia del tubicino, sia dei chip facenti parte dell’half-stave.
Raffreddare il rivelatore è di importanza cruciale per evitare di distruggere l’SPD. Ogni stave deve smaltire una potenza di 25 W e, data la compattezza del rivelatore, un raffreddamento ad aria risulterebbe inefficiente. Va ricordato che ALICE è un rivelatore a simmetria cilindrica costituito da più rivelatori coassiali: l’SPD corrisponde ai due cilindri più interni [3][4].
Figura 1.6: Sezione trasversale di un ladder: sono rappresentati tutti i materiali che compongono il ladder, oltre al CFSS e al tubo di raffreddamento.
Figura 1.7: Vista assonometrica dell’half-stave. Sono etichettati i vari componenti.

Capitolo 1
12
1.3 Il sistema di raffreddamento
Il sistema di raffreddamento sviluppato per l’SPD deve rispondere alle seguenti specifiche di progetto:
- deve essere in grado di rimuovere una potenza complessiva di 1500 W, sviluppata da 60 stave. Ciò vuol dire che deve asportare 25 W da ciascun stave;
- deve mantenere la temperatura del fluido refrigerante all’interno del tubicino al di sopra di 15°C, in modo da evitare condensa;
- deve mantenere la temperatura dello stave tra i 25-30°C; - deve minimizzare il gradiente di temperatura lungo tutto lo stave; - deve lavorare a pressioni ragionevoli al fine di poter minimizzare la quantità
di materiale richiesto; - non deve permettere perdite di fluido refrigerante. I tubicini sono molto sottili con spessore delle pareti di circa 40 µm. Nella scelta del sistema di raffreddamento da adottare sono state fatte diverse
analisi: è stato valutato il possibile utilizzo dell’acqua come fluido refrigerante, in quanto essa possiede buone caratteristiche termiche e idrauliche, tuttavia eventuali perdite danneggerebbero l’SPD. Successivamente è stata valutata la possibilità di utilizzare dei fluidi dielettrici, come ad esempio i fluoro carburi ed i fluoro idrocarburi. Infine il fluido refrigerante scelto è il C4F10 (perfluorobutano). La sua scelta è principalmente dovuta al fatto che non presenta idrogeno nella sua struttura molecolare: l’idrogeno favorisce la formazione di acidi HF altamente corrosivi per il phynox, in seguito ad una esposizione a radiazioni ionizzanti. In contrasto si ha che le prestazioni termiche ed idrauliche del C4F10 sono scarse, come vale per gran parte dei fluidi dielettrici, avendo una capacità termica relativamente bassa ed una perdita di carico notevole. Di conseguenza, per avere dei flussi adeguati all’asportazione del calore dissipato lungo lo stave, è necessaria una rilevante differenza di pressione alle estremità del tubicino.
Al fine di migliorare la capacità termica del fluido refrigerante scelto, si è preferito utilizzare un sistema di raffreddamento evaporativo, che permette inoltre di utilizzare portate di fluido minori.
Questa scelta è stata influenzata anche dai seguenti motivi: - aumento del coefficiente di scambio convettivo. In figura 1.8 è riportato un
grafico dell’andamento di questo coefficiente lungo un tratto di tubo. Si può notare la zona con valore massimo, circa 5000 W/m2K, alla quale si opererà approssimativamente proprio sotto allo stave;
- temperatura mantenuta costante lungo lo stave. Siccome si ha un fluido in coesistenza di fase, la temperatura è costante;
- limitazione delle deformazioni indotte nel tubo inseguito alla minor caduta di pressione;
- minor massa circolante nel sistema, essendoci la coesistenza delle due fasi e non solo la fase liquida;
- possibilità di avere dimensioni ridotte del tubicino.

Il Silicon Pixel Detector (SPD)
13
Figura 1.8: Grafico rappresentante l’andamento del coefficiente di convezione in funzione della lunghezza del tubo e della frazione di vapore. Si nota come il coefficiente aumenti nella transizione da liquido saturo a liquido in ebollizione.
E’ da notare che nella parte di tubicino situata sotto allo stave si ha un’evaporazione in convezione forzata: in questa situazione il fluido riscaldato è bifase, ovvero è presente una miscela di liquido e vapore. Questa miscela può assumere diversi regimi di moto andando ad influenzare il valore del coefficiente di scambio termico.
1.3.1 Funzionamento dell’impianto
L’impianto di raffreddamento è basato sul ciclo termodinamico Joule-Thompson
(figura 1.9). In figura 1.10 invece, è riportato uno schema funzionale dell’impianto, dove sono segnati i punti corrispondenti nel diagramma termodinamico. Il C4F10 evapora all’interno dell’SPD a 15ºC e ad una pressione di 1.92 bar. Sebbene alla fine dello stave rimanga una percentuale di liquido non evaporato, le condizioni del fluido all’uscita del rivelatore si possono considerare di vapore saturo (punto E). Il tratto di ritorno all’impianto di raffreddamento, di circa 35 m, introduce un salto di pressione e porta il vapore all’equilibrio termico con l’ambiente in cui si trova il rivelatore, cioè la caverna, la quale si trova ad una temperatura attorno ai 22 ºC. All’ingresso del compressore lo stato termodinamico del fluido è di vapore surriscaldato (punto F).

Capitolo 1
14
La velocità del compressore viene regolata mediante un regolatore PID in anello chiuso, in modo da mantenere una pressione di evaporazione costante, e dunque una
temperatura costante nel tratto di tubicino passante per lo stave. Questa caratteristica consente di poter scegliere la temperatura di evaporazione entro un intervallo limitato tra i 14°C e i 18°C. All’uscita del compressore (punto G), il vapore entra nel condensatore, si raffredda, e cambia stato cedendo calore al circuito dell’acqua fredda. Il liquido saturo (punto H) viene raccolto in fondo al condensatore, e poi sottoposto ad un ulteriore raffreddamento tramite un secondo scambiatore ad acqua fredda (punto A), allo scopo di evitare cavitazione nella pompa.
Figura 1.9: Diagramma termodinamico del ciclo Joule-Thompson
La pompa innalza la pressione del liquido (punto B) ad un valore abbastanza alto
da consentire al liquido di fluire fino al rivelatore, situato a circa 50 m di distanza e 5 m al di sopra del livello di partenza, e raggiungere i capillari allo stato di liquido sottoraffreddato (punto C), ma in equilibrio termico con la caverna. Allo stesso modo della pressione di ingresso al compressore, la pressione all’uscita della pompa può essere impostata mediante la regolazione della velocità del rotore, così da poter a sua volta regolare la portata massica di fluido nei capillari. Ciò consente di adattare il flusso di refrigerante ai diversi regimi di dissipazione entro un intervallo limitato che dipende dalla lunghezza e dal diametro dei capillari. L’espansione all’uscita dei capillari porta il C4F10 alla pressione ed alla temperatura per la quale si ha la coesistenza di fase liquida e vapore (punto D). Lungo lo stave, la frazione di liquido diminuisce mentre avviene l’evaporazione dovuta all’assorbimento del calore dissipato dal rivelatore.
Figura 1.10: Schema funzionale dell’impianto.

Il Silicon Pixel Detector (SPD)
15
Nella figura seguente si riporta uno schema più dettagliato del circuito, dove sono indicati i componenti presenti nell’impianto.
1 → Filtro 2 → Valvola Schrader 3 → Filtro assorbitore di O2 4 → Sensore di temperatura 5, 25, 36 → Manometri 6, 24, 38, 41, 42 → Sensori di pressione termoelettrici 7, 20, 21, 39, 44, 28 → Valvole ad aria compressa 8, 26, 31, 40 → Valvole di sicurezza 9, 32, 43 → Interruttori di pressione 10 → Filtro assorbitore di H2O e HF 11 → Serbatoio sottovuoto 12 → Pompa 13 → Scambiatore di calore 14, 27 → Valvole regolatrici 15, 16 → Misuratori di portata 17 → Bilancia (monitoraggio perdite liquido) 18, 22 → Tubo flessibile 19 → Finestra di controllo 23 → Condensatore 29 → Compressore 30 → Valvola di controllo 33 → Misuratore di flusso 34, 35 → Valvole di chiusura manuale 37 → Serbatoio polmone 45 → Distribuzione pneumatica
Figura 1.11: Schema complessivo dell’impianto con i vari componenti.

Capitolo 1
16
Le valvole di sicurezza sono poste all’uscita per evitare un riflusso verso il rivelatore che causerebbe un notevole danneggiamento al rivelatore stesso. L’installazione delle due pompe in parallelo permette il funzionamento dell’impianto anche durante la manutenzione di una delle due. In un periodo recente, è stata adottata la ridondanza anche del compressore, per le stesse ragioni. 1.3.2 Dati di progetto del sistema Questi valori sono indicativi perché dipendono dal flusso iniettato e dalle condizioni termiche ambientali. 1) Calcolo della portata.
Il flusso di massa m& del fluido refrigerante per ogni stave è stimabile nel seguente
modo:
sgkgkJkgkJ
W
hh
stavePotenzam
ED
/3.0/223/307
25/ ≈−
=−
=&
con hD ed hE i valori dell’entalpia rispettivamente ai punti D ed E del ciclo termodinamico in figura 1.9.
Nella seguente tabella (tabella 1.1) sono riportate le portate per uno stave, per un settore e per l’intero rivelatore.
Densità a 15°C [kg/m3]
Portata stave Portata settore
(6 stave) Portata rivelatore
(60 stave)
[l/s] [l/s] [l/s] Liquido saturo
Vapore saturo
[g/s] in out
[g/s] in out
[g/s] in out
1536 20.75 0.3 0.705 52.05 1.8 4.22 312.3 18 42.2 3123
Tabella 1.1: Dati portate volumetriche e massiche per stave, settore e rivelatore completo. 2) Potenza da rimuovere al condensatore ed al sub-cooler.
Per il cambio di fase da vapore a liquido:
( ) ( ) Wmhh HG 3240036.0220310 =×−=− &
Per l’ulteriore raffreddamento (sub-cooling):
( ) ( ) Wmhh AH 288036.0212220 =×−=− &

Il Silicon Pixel Detector (SPD)
17
3) Stima della caduta di pressione lungo lo stave.
La stima teorica della caduta di pressione in un flusso bi-fase è difficile da ottenere. Per ottenere risultati abbastanza buoni invece, si può mediare la stima fatta su due casi ipotetici:
- 100% liquido (flusso laminare); - 100% vapore (flusso turbolento). Siccome la lunghezza dello stave è ridotta, 288 mm, l’approssimazione adottata
sarà la media aritmetica tra i due casi. E’ possibile calcolare il diametro idraulico equivalente del tubicino (la sezione è
rappresentata in figura 1.12) nel seguente modo:
( )( ) mm
bagnatoPerimetro
AreaDH 02.1
285.6
6027.14
6.026.08.24
6.06.06.08.2
4_
4
2
==×+×−
×+×−==
π
π
Figura 1.12: Sezione del tubicino di raffreddamento dello stave.
A 15°C la variazione della temperatura di evaporazione rispetto alla pressione di evaporazione è di:
mbarP
T
TEVA
EVA /C0149.0C15
°≈
∂∂
°=
Una stima del salto di pressione e di temperatura lungo lo stave è mostrata in
tabella 1.2 per due portate differenti.
Portata [g/s] Numero di Reynolds
(solo liquido)
Numero di Reynolds
(solo vapore)
∆p (solo liquido)
[mbar]
∆p (solo vapore)
[mbar]
∆TEVA lungo lo stave
[K]
0.6 (50 W) 1536 36805 6 214 1.6
0.3 (25 W) 767 18400 2.7 62 0.5
Tabella 1.2: Stime dei salti di temperatura e pressione lungo lo stave, per una potenza di 25 W e 50 W.

Capitolo 1
18
Si può osservare da queste stime che per rispettare un certo grado di uniformità della temperatura è necessaria una modifica della portata. Un eccesso di portata causa un gradiente di temperatura elevato lungo lo stave. La regolazione della portata è effettuata variando la pressione all’ingresso del capillare [5].

CAPITOLO 2 – Trasmissione del calore e FEM
Conoscere le principali modalità di scambio termico e le equazioni che descrivono
la trasmissione del calore è essenziale per capire la fisica del problema trattato i questa tesi. Inoltre, senza l’introduzione di questi concetti, non è possibile comprendere in fondo l’applicazione del metodo degli elementi finiti (FEM) a tali equazioni. In questo capitolo, pertanto, viene riportata una breve trattazione della trasmissione del calore e poi verrà esposto il metodo degli elementi finiti. Il metodo verrà applicato direttamente all’equazione della conduzione, dato che è l’equazione risolta numericamente dal codice ANSYS in questo problema.
2.1 Conduzione nello stato solido
In un corpo la trasmissione del calore avviene per mezzo di un flusso termico nel corpo stesso e viene chiamata conduzione. Nel presente caso la si studia in un corpo solido e si considera un materiale omogeneo ed isotropo. Il calore si muove sempre dalla zona a temperatura più alta a quella più bassa. L’obbiettivo è quello di trovare un’equazione che descriva questo fenomeno, ovvero l’equazione della conduzione, la quale fornisce come soluzione la distribuzione di temperatura nel corpo a partire dalle condizioni iniziali ed al contorno. In altre parole, note le condizioni iniziali e al contorno, determinare il campo termico T(x,y,z,t) significa studiare la conduzione nel corpo in esame (figura 2.1).
Figura 2.1: Campo termico nel corpo di volume V al tempo t.
Si parte dal primo principio della termodinamica, che esprime la conservazione
dell’energia, ed il postulato di Fourier, il quale mette in relazione il flusso termico con il gradiente di temperatura.

Capitolo 2
20
Il gradiente di temperatura è un vettore associato al campo scalare T ed ha la seguente espressione:
z
Tk
y
Tj
x
TiT
∂∂+
∂∂+
∂∂=∇
rrr
rappresenta il massimo differenziale termico e la sua direzione in ogni punto del dominio.
Dalle disuniformità termiche in un corpo si possono osservare due cose: 1 – Il flusso termico è sempre opposto al gradiente termico:
T
T
q
q
∇∇−=r
r
;
2 – L’intensità del flusso termico è direttamente proporzionale al modulo del
gradiente di temperatura: Tq ∇∝r
.
Queste due osservazioni fisiche vengono riassunte dal postulato di Fourier: Tq ∇−= λr
(1)
il quale può essere scomposto lungo le componenti:
x
Tqx ∂
∂−= λ y
Tqy ∂
∂−= λ z
Tqz ∂
∂−= λ
Il coefficiente di proporzionalità λ si
chiama conduttività termica, espressa in W/mK, ed è funzione del materiale e della temperatura. Siccome si è ipotizzato di avere un materiale omogeneo ed isotropo si può considerare λ funzione solo della temperatura, λ= λ(T).
Finora è stato considerando il flusso specifico, quello definito per unità di superficie, nel caso unidimensionale (figura 2.2) invece si definisce:
dx
dTAq λ−= (2)
Figura 2.2: Postulato di Fourier in una dimensione.

Trasmissione del calore e FEM
21
dove A è l’area ortogonale alla direzione del flusso. Il flusso calcolato è quello totale passante attraverso una superficie data, ed è uno scalare.
Per una superficie piana di area A il flusso totale si calcola, a partire da quello specifico, facendo il seguente prodotto scalare:
Anqq
rr ⋅=
con nr
vettore unitario normale alla superficie (figura 2.3a). Per una superficie generica A si passa all’integrale:
∫ ⋅=A
dAnqqrr
(3)
dove dA rappresenta la superficie infinitesima (figura 2.3b).
Figura 2.3a: Flusso q attraverso A. Figura 2.3b: Flusso attraverso una superficie generica.
Il calore che viene trasmesso all’interno del corpo proviene da una sorgente, o fonte, data da reazioni chimiche o nucleari, da una resistenza elettrica o da altre origini. Si parla dunque di generazione interna di calore, con dimensioni di una potenza su unità di volume, dato che si tratta di energia termica prodotta nell’unità di tempo in una determinata regione del corpo tridimensionale. Indicando con q& la generazione interna di calore e con Q il calore generato in una regione di volume V si ha la seguente uguaglianza:
∫=∂∂
VdVq
t
Q& (4)
Ora che si hanno a disposizione le espressioni del flusso termico e della
generazione interna di calore si può passare a ricavare l’equazione della conduzione. Considerando un volume di controllo finito, di cui si ha uno schema in figura 2.4,
dal bilancio energetico dovuto al primo principio si ricava:
∫ ∫∫ +⋅−=∂∂
A VVdVqdAnqdV
t
Tc &
rrρ (5)

Capitolo 2
22
in cui il primo termine rappresenta la variazione di energia interna, ρ è la densità del mezzo e c il calore specifico.
Figura 2.4: Volume di controllo V delimitato dalla superficie A. Si ha sia generazione interna di calore che flusso totale attraverso l’area A.
Applicando il teorema della divergenza di Gauss al termine contenente il flusso
termico:
∫ ∫ ⋅∇=⋅A V
dVqdAnqrrr
(6)
il bilancio di primo principio risulta un’equazione integrale sul volume considerato:
∫ ∫∫ +⋅∇−=∂∂
V VVdVqdVqdV
t
Tc &
rρ (7)
Togliendo il segno di integrale e utilizzando il paradosso di Fourier si giunge alla
conclusione:
( ) qTt
Tc &+∇−⋅−∇=
∂∂ λρ (8)
che è la forma più generale dell’equazione della conduzione. Siccome il materiale è omogeneo ed isotropo, la conducibilità termica non dipende dalle coordinate spaziali e di conseguenza la forma finale dell’equazione è:
λq
Tt
T
a
&+∇=
∂∂ 21
(9)
dove a è la diffusibilità termica definita come a=λ/ρc ed è espressa in m2/s.

Trasmissione del calore e FEM
23
La (9) è un’equazione differenziale alle derivate parziali che in coordinate cartesiane assume la forma:
λq
z
T
y
T
x
T
t
T
a
&+
∂∂+
∂∂+
∂∂=
∂∂
2
2
2
2
2
21 (10)
Questa equazione fa parte della classe delle equazioni paraboliche. In regime stazionario, che è il caso di interesse in questo trattato, l’equazione si
semplifica nel modo seguente:
λq
T&
−=∇2 (11)
che è l’equazione di Poisson ed è un’equazione ellittica [6].
I metodi di soluzione analitica non verranno riportati visto che lo scopo della trattazione è quello di risolvere numericamente l’equazione mediante il metodo degli elementi finiti.
Per quanto riguarda le condizioni al contorno, possono venire introdotte nei seguenti tre modi:
1 – condizione al contorno del I tipo o di Dirichlet: si impone una T=TS sulla
superficie del corpo in esame. 2 – condizione al contorno del II tipo o di Neumann: si impone un flusso termico
in direzione normale alla superficie:
n
Tqs ∂
∂−= λ (12)
3 – condizione al contorno del terzo tipo o di Robin (convettiva): ( )fTTq −= α (13)
α è il coefficiente di convezione [W/m2K].
2.2 Convezione e determinazione del coefficiente α Lo scambio termico convettivo, o per convezione, richiede il moto di un fluido. Il
fenomeno è caratterizzato dalla simultanea presenza di conduzione, fra gli strati adiacenti di fluido a temperatura diversa, e dall’avvezione associata al movimento del fluido e quindi ai flussi entalpici.
Ci sono due tipologie principali di convezione: la naturale e la forzata. In quella naturale il movimento del fluido è dato dalla differenza di densità nelle varie regioni

Capitolo 2
24
del fluido dovute alla presenza del campo termico stesso, quindi il fluido è mosso dalla forza di galleggiamento. Mentre in quella forzata il fluido viene messo in movimento a spese di lavoro meccanico, per esempio da una pompa nel caso di liquido in tubazione o da un ventilatore se si tratta di aria o gas.
Nel processo di convezione il fluido in movimento lambisce la superficie di un corpo a T=Ts. Nella zona adiacente al corpo colpito dal fluido è presente uno strato sottile in cui il fluido è rallentato ed ha velocità compresa tra zero e quella del fluido indisturbato u∞ (lontano dalla superficie). Si tratta dello strato limite dinamico (figura 2.5a). Inoltre, è presente sempre in prossimità della superficie, lo strato limite termico (figura 2.5b), zona nella quale la temperatura è compresa tra quella della superficie e quella del fluido indisturbato.
Figura 2.5a: Strato limite dinamico con profili di velocità.
Figura 2.5b: Strato limite termico con profili di temperatura.
Una volta note la temperatura TS della superficie e la T∞ del fluido lontano dalla
parete, studiare la convezione significa trovare il coefficiente di proporzionalità tra il flusso termico e ∞− TTs , infatti si può dedurre che:
∞−∝ TTq s
e quindi: ( )∞−= TTq sα se TS>T∞
(14) ( )sTTq −= ∞α se T∞>TS

Trasmissione del calore e FEM
25
Per determinare il coefficiente di proporzionalità α, cioè il coefficiente di convezione, bisogna conoscere lo strato limite dinamico, ovvero il campo delle velocità all’interno di esso.
L’equazione che consente di trovare le correlazioni per determinare α è quella dell’energia.
Figura 2.6: Volume di controllo di fluido nello strato limite.
Considerando il generico volume di controllo, di fluido questa volta, riportato in
figura 2.6, il bilancio di primo principio diventa:
qhmhmt
Uuuee +−=
∂∂
∑∑ && (15)
in cui U è l’energia interna, em& ed um& sono le portate rispettivamente entranti ed
uscenti dal volume di controllo, eh ed uh le entalpie medie ed infine q è il flusso
termico conduttivo attraverso la superficie che delimita il volume di controllo. Sono state trascurate le variazioni di energia cinetica e potenziale, i lavori
compiuti dalle forze viscose e la generazione interna di calore. I flussi entalpici, dati dal prodotto delle portate e delle entalpie, si chiamano flussi avvettivi. Si definisce un vettore flusso termico specifico convettivo che tiene conto dei due flussi presenti:
TTcuqhuJ p ∇−=+=′′ λρρ rrrr (16)
dove cp è il calore specifico a pressione costante e u
r la velocità del fluido passante
per A. Integrando la distribuzione del flusso specifico convettivo sulla superficie A si
ottiene:
( ) ∫∫∑∑ ⋅′′−=⋅+−=+−AAuuee dAnJdAnqhuqhmhm
rrrrr&& ρ (17)
dove il segno negativo deriva dall’orientamento verso l’esterno del versore n
r.

Capitolo 2
26
Applicando il teorema della divergenza si ottiene l’uguaglianza:
( )dVTTcudVJdAnJV pVA ∫∫∫ ∇−⋅∇=′′⋅∇=⋅′′ λρr
rrr (18)
L’energia interna è legata alla temperatura dalla legge ( ) ( )Tcdud v=ˆ , per cui il
termine di variazione può essere riscritto come:
( ) ( )∫∫
∂∂=
∂∂=
∂∂
V vVTc
tdVu
tt
U ρρ ˆ (19)
vc è il calore specifico a volume cotante, ed u è la l’energia interna specifica.
Dalla (15), (17), (18) e (19) si ottiene l’integrale:
( ) ( ) 0=
∇−⋅∇+∂∂
∫ dVTTcuTctV pv λρρ r
(20)
valida per qualsiasi volume si scelga.
Dato che l’integrando di un integrale nullo è pari a zero, si giunge all’equazione dell’energia in forma conservativa:
( ) ( ) ( )TTcuTct pv ∇⋅∇=⋅∇+
∂∂ λρρ r
(21)
e se il prodotto ρcp è costante si ricava la forma non conservativa:
( )TTuct
Tc pv ∇⋅∇=∇⋅+
∂∂ λρρ r
(22)
Infine, se λ è costante e ci si trova in regime stazionario l’equazione si riduce a: TaTu 2∇=∇⋅r (23) Le condizioni al contorno da applicare sono analoghe a quelle per l’equazione
della conduzione [7]. Come già anticipato questa equazione consente di trovare delle correlazioni per
calcolare il coefficiente di convezione α nella tipologia di convezione in esame. Queste correlazioni esprimono il legame tra parametri adimensionali definiti in modo opportuno.
Il primo parametro adimensionale da definire è il numero di Reynolds Re, il quale esprime il rapporto tra le forze inerziali e viscose. E’ un parametro del moto del fluido ed è definito come:
µ
ρLu∞=Re (24)

Trasmissione del calore e FEM
27
dove L è una lunghezza caratteristica e µ è la viscosità dinamica del fluido. Altro parametro è il numero di Nusselt Nu che rappresenta con quale pendenza il
profilo di velocità si stacca dalla parete, ed è definito dalla seguente uguaglianza:
λ
αLNu = (25)
Si osserva che questo parametro è legato al coefficiente di convezione, infatti è
dalla sua determinazione che lo si trova. L’ultimo parametro utile alla descrizione della convezione forzata (per la naturale
ne serve un altro) è il numero di Prandtl Pr, il quale lega gli spessori degli strati limite dinamico e termico, ed ha l’espressione:
a
ν=Pr (26)
con a la diffusibilità termica e ν la viscosità cinematica del fluido. Ora che sono stati definiti i parametri adimensionali si riporta un esempio di
correlazione per il caso di convezione forzata: ( ) baCfNu PrRePrRe, == (27)
i parametri a,b,C dipendono dal problema. Una volta conosciuto il Nu si ricava α [8]. Riassumendo, i passi principali da effettuare per studiare la convezione sono: - fissare una temperatura, di solito la media fra TS e T∞, alla quale si possono
studiare le proprietà del fluido quali λ, ρ, µ, cp e cv; - calcolare Re e Pr; - scegliere la correlazione in funzione della geometria e del Re; - ricavare α da Nu: - calcolare il flusso termico ( )∞−= TTAq sα , dove A indica l’area interessata
nello scambio termico.
2.3 Resistenze termiche, analogia elettrica
Come per i circuiti elettrici, in cui si hanno delle resistenze al passaggio della corrente messa in moto dalla differenza di potenziale applicata ai capi, in trasmissione del calore si possono definire delle resistenze al passaggio del flusso termico dovuto alla presenza di un differenziale di temperatura. Esse si chiamano resistenze termiche [9].
Nel caso elettrico il valore della corrente è dato dal rapporto fra la differenza di potenziale e la resistenza, ovvero;
R
Vi
∆= (28)

Capitolo 2
28
mentre, in maniera analoga, nel caso termico il flusso termico è dato dal rapporto fra il differenziale termico e la resistenza, cioè in generale:
R
Tq
∆= (29)
Figura 2.7: Analogia tra resistenza elettrica e termica.
La figura 2.7 riporta gli schemi concettuali della definizione di resistenza, sia
elettrica che termica. A titolo esemplificativo si considera il caso in cui si hanno pareti piane parallele.
Una volta note la conducibilità termica e lo spessore del materiale le resistenze termiche è definita nel seguente modo:
- resistenza specifica di conduzione λλx
R∆=′′
W
Km2
;
- resistenza di conduzione A
xR
λλ∆=
W
K;
- resistenza di convezione αα1=′′R
W
Km2
;
- resistenza di convezione A
Rαα1=
W
K.
Per altre geometrie il calcolo delle resistenze viene fatto a partire dalla definizione
(29) e dal postulato di Fourier. Sempre restando al caso delle pareti piane parallele, se si ha una parete
multistrato, o non, si può definire un coefficiente di scambio termico globale che ingloba sia il contributo conduttivo che quello convettivo. L’espressione di tale termine ha la seguente forma:
1
21
111−
+
∆+=
′′= ∑∑ i
i
i
i i
x
RU
αλα
Km
W2
(30)
ed il flusso termico totale allora diviene: TUAq ∆= (31)
La situazione è rappresentata in figura 2.8.

Trasmissione del calore e FEM
29
Figura 2.8: Parete multistrato ed analogia elettrica.
2.4 Evaporazione in convezione forzata
Un caso interessante per gli scopi di questa tesi è quello della convezione forzata in tubazione con un fluido soggetto a cambio di fase, dato che il sistema di raffreddamento dell’SPD sfrutta questo fenomeno. Il fluido dunque si trova alla temperatura di saturazione ed è caratterizzato da un certo titolo, riferito alle portate di liquido e vapore rispettivamente lm& e vm& espresse in kg/s:
v
v l
mx
m m=
+&
& & (32)
La presenza delle due fasi ha influenza sul tipo di moto, visto anche che il titolo di
vapore cresce lungo il tragitto nel tubo occupando gran parte della sezione. La frazione della sezione del tubo occupata dal vapore, frazione di vuoto, è esprimibile dalla:
1
11 v v
l l
u xu x
Φ ρρ
= −+ (33)
in cui le u sono le velocità medie del vapore e del liquido e le ρ le densità. L’aumento del titolo dà luogo alla presenza di diversi regimi di moto lungo la direzione

Capitolo 2
30
longitudinale al flusso. I tipi di moto che si hanno sono, in ordine a partire dal tratto iniziale in cui avviene la fornitura di calore, i seguenti:
1 - moto a bolle, in cui lo scambio termico è dominato dalla nucleazione (formazione di bolle localizzata);
2 - moto a tappi, caratterizzato da uno scambio termico prevalentemente dovuto
alla nucleazione in cui le bolle incominciano a unirsi formando dei tappi; 3 - moto anulare, in cui, a causa dell’aumento del titolo, il vapore scorre
circondato da un piccolo strato di fluido; 4 - zona di transizione dove, a causa dell’assottigliarsi dello strato di fluido, il
meccanismo della trasmissione di calore inizia ad essere prevalentemente convettivo; 5 - moto a nebbia, in cui l’aumento del titolo toglie stabilità allo strato di fluido
formando un aerosol di vapore con delle particelle di liquido sospese; 6 - zona nella quale è presente solo il vapore.
Figura 2.9: Moto di un fluido in ebollizione in conduttura. Sono schematizzati i vari regimi di moto.
La figura 2.9 riporta una schematizzazione della situazione appena descritta, ed in
figura 2.10 viene riportato l’andamento del coefficiente di convezione in funzione della frazione di vuoto..
Figura 2.10: Coefficiente di scambio convettivo per fluido in ebollizione.

Trasmissione del calore e FEM
31
Il fenomeno dell’evaporazione causa diversi regimi di moto i quali influenzano il coefficiente di convezione.
Verrà esposta la correlazione per il calcolo del coefficiente medio di scambio, il quale è somma di due contributi, uno che tiene conto dell’ebollizione nucleata αen, l’altro che tiene conto della convezione bifase αc:
cen ααα += (34)
Il coefficiente αc è legato al coefficiente di convezione αl che avrebbe la fase
liquida se scorresse nel tubo: lc Fαα = (35)
Il coefficiente αl viene calcolato mediante la correlazione seguente: 4.08.0 PrRe023.0 LLl =α (36)
dove
( )
LL
dxG
µ−= 1
Re (37)
L
plLL
c
λµ
=Pr (38)
F è un coefficiente di intensificazione che serve per tenere conto della presenza
delle due fasi e si calcola tramite le relazioni:
1=F se 1.01 ≤
ttX
736.0
213.01
35.2
+=
ttXF se 1.0
1 >ttX
con Xtt il parametro di Lockart-Martinelli per moto turbolento:
1.05.09.0
1
−=l
v
l
vtt x
xX
µµ
ρρ
(39)
Il contributo dato dall'ebollizione nucleata è calcolabile secondo la: Senen
'αα = (40)

Capitolo 2
32
nella quale S indica un fattore di soppressione dell'ebollizione calcolabile come:
( )[ ] 117.125.16 Re1053.21−
⋅+= FS L (41) ed α’
en è pari a: plLen c79.0' 00122.0 λα = (42)
Quella appena esposta è la correlazione di Chen per tubo verticale, ma è
applicabile anche al caso di deflusso orizzontale se il diametro del tubo è di dimensioni ridotte e la portata è elevata. Un’altra correlazione molto usata è quella di Gungor-Winterton:
bl SE ααα += (43)
in cui 4.08.0 PrRe023.0=lα (42)
5.0
55.012.0
3
2
log55 −−
−
= M
p
p
p
pq
ccbα (45)
dove M indica la massa molecolare del fluido frigorigeno, pc la pressione critica e q il flusso termico specifico [10]. I coefficienti E ed S si calcolano invece mediante le espressioni: 86.016.14 37.1104.21 −+⋅+= ttXBoE (46)
( ) 117.126 Re1015.11−⋅+= ES (47)
2.5 Irraggiamento
L’irraggiamento è una modalità di scambio termico in cui il calore, o energia termica, viene trasmesso da onde elettromagnetiche. Ogni corpo che si trova ad una data temperatura emette un certo spettro di onde elettromagnetiche. Una caratteristica di tale onde è che si propagano anche nel vuoto, quindi non c’è bisogno di un mezzo, che sia fluido o solido, per trasmettere il calore da un corpo ad un altro. Soltanto le superfici esterne di un corpo opaco irradiano l’ambiente esterno o assorbono energia sottoforma di onde, ciò avviene nello spessore di un µm. Per questo motivo, nello studio della trasmissione del calore per irraggiamento, si considerano le superfici che

Trasmissione del calore e FEM
33
delimitano un corpo opaco e le relative temperature. Nei corpi trasparenti invece, le radiazioni vengono assorbite in strati di centinaia di metri, per cui il loro contributo verrà trascurato.
La prima grandezza da definire per l’analisi della radiazione termica è l’intensità monocromatica direzionale, che misura l’intensità di radiazione emessa per unità di superficie, per unità di lunghezza d’onda e per unità di angolo solido:
( )3
ecos
d q
d A d dθλ =Ω λ
I
mstm
W
µ2 (48)
dove q è il flusso termico in W, λ indica la lunghezza d’onda in µm, Ω l’angolo solido in steradianti, A l’area in m2 e θ l’angolo zenitale in radianti. E’ una grandezza direzionale perché dipende dalla posizione in cui ci si trova rispetto al corpo che emette la radiazione. Infatti il prodotto Acosθ è la proiezione dell’area di emissione su di un piano perpendicolare alla direzione in cui si considera l’emissione. In figura 2.11 è rappresentata la situazione considerata.
Figura 2.11: Elemento di superficie irradiante.
Integrando sulla semisfera relativa alla superficie in questione si trova il potere
emissivo monocromatico ed integrando ulteriormente sull’intero spettro elettromagnetico si trova il potere emissivo globale in W/m2:
∫ Ω=π
λλ θ2
0
cos dIE e (49)
∫∞
=0
λλ dEE (50)
Se la radiazione è diffusa, cioè non direzionale, le (49) e (50) si riducono alle
semplici espressioni: λλ π eIE ⋅= (51)
∫∞
=⋅=0
λππ λ dIIE ee (52)
Capitolo 2
34
La seconda grandezza da introdurre è la radiazione incidente su di una superficie, definita in modo del tutto analogo, utilizzando: l’intensità monocromatica di radiazione incidente I iλ , definita nello stesso modo di Ieλ , l’integrale sull’angolo solido chiamato irradiazione monocromatica e l’integrale sullo spettro elettromagnetico chiamato irradiazione globale (o totale):
∫ Ω=π
λλ θ2
0
cos dIG i (53)
∫∞
=0
λλ dGG (54)
La terza ed ultima grandezza è la radiosità J che tiene conto sia della radiazione
emessa che di quella riflessa dalla superficie. Tale grandezza fa sempre riferimento all’intensità di radiazione emessa e riflessa Ie+r ed agli integrali, analoghi a quelli precedenti:
( )∫ Ω= +
π
λλ θ2
0
cos dIJ re (55)
∫∞
=0
λλ dJJ (56)
La (53), (54), (55) e (56) possono essere espresse in maniera analoga alle (51) e
(52) se si tratta di radiazione diffusa [11].
2.5.1 Radiazione di corpo nero Per corpo nero si intende una superficie ideale che ha la caratteristica di assorbire
tutta la radiazione incidente e di emettere più di qualsiasi altra superficie che si trovi alla stessa temperatura. L’emissività del corpo nero è data dalla legge di Planck:
( ) ( )[ ]1/exp,
25
1
−=
TC
CTEn λλ
λλ (57)
dove C1=3,742E8 (Wµm4)/m2, C2=1,439E4 µmK. In figura 2.12 sono riportate delle curve dell’emissività a temperatura costante. Si nota che Enλ cresce con la temperatura ed ha valori più elevati per lunghezze d’onda piccole. I valori di massimo delle curve iso-T si trovano su un’iperbole equilatera descritta dalla legge di Wien: 3max CT =λ (58)

Trasmissione del calore e FEM
35
da questa si ricavano le lunghezze d’onda per cui si ha la massima emissione ad una data temperatura. La costante vale C3=2898 µmK.
Figura 2.12: Curve iso-T della legge di planck. La curva tratteggiata è la legge di Wien.
Come definito precedentemente, il potere emissivo globale viene calcolato
integrando il potere emissivo monocromatico su tutto lo spettro elettromagnetico. in questo caso, quello del corpo nero, si integra la legge di Planck ottenendo la legge di Stefan-Boltzmann:
∫∞
==0
4TdEE nn σλλ (59)
La costante σ è la costante di Boltzmann e vale 5,67E-8 W/m2K4 [12].
2.5.2 Superfici reali Le caratteristiche del corpo nero appena descritte fanno da riferimento per lo
studio dell’irraggiamento delle superfici reali. Come prima cosa si definisce l’emissività monocromatica della superficie. Essa è una grandezza direzionale dipendente dalla temperatura alla quale si trova la superficie in esame. E’ data dal rapporto seguente:
λ
λλε
nI
I=Ω , 10 ≤≤ Ωλε (60)
Se si considera radiazione diffusa, si considera un’emissività mediata sulla
direzione, l’emissività monocromatica media emisferica:

Capitolo 2
36
λ
λλε
nE
E= , 10 ≤≤ λε (61)
la dipendenza dalla temperatura può essere trascurata. L’emissività globale la si calcola con la seguente:
4
04
0)(T
dE
T
dE
E
ET
n
n σ
λε
σ
λε
λλλ ∫∫∞∞
=== (62)
e media il comportamento irregolare di Eλ come rappresentato in figura 2.13.
Figura 2.13: Emissività in funzione della lunghezza d’onda.
Ora allo stesso modo si introduce il coefficiente di assorbimento, la cui
dipendenza dalla temperatura è di nuovo trascurabile e si considera radiazione diffusa. Dunque si ha che
λ
λλα
nG
G= , 10 ≤≤ λα (63)
rappresenta il coefficiente di assorbimento monocromatico. Quello totale lo si calcola mediante la:
nn G
dG
G
G ∫∞
== 0λα
αλλ
(64)
La legge di Kierchoff dice che α(T)=ε(T). Infine restano altre due grandezze, la
riflessione ρ e la trasmissione τ. Il bilancio fra le grandezze, mediate sulla semisfera, porta alla conclusione che segue:

Trasmissione del calore e FEM
37
1=++ τρα (65) I casi limite per la trasmissione sono superfici opache τ=0 e corpi trasparenti τ=1
[13].
2.5.3 Scambio termico radiativo Nel meccanismo di scambio termico radiativo le superfici coinvolte nell’analisi si
considerano come assorbitori, riflettori diffusi ed emettitori. Se come mezzo interposto c’è aria, la sua presenza è ininfluente. Un parametro importante da considerare nella determinazione dell’intensità dello scambio radiativo è il fattore di vista F12, che rappresenta quale frazione di flusso proveniente dalla superficie 1 raggiunge la superficie 2. Una volta introdotto questo fattore, il flusso termico generato dalla superficie nera 1 che raggiunge la superficie nera 2 è:
1 2 1 1 12nq E A F→ = (66)
La figura 2.14 riporta un esempio della situazione che si ha quando si calcola F12.
Figura 2.14: Calcolo dei fattori di vista.
Per calcolare i fattori di vista F12 ed F21 si utilizzano le seguenti espressioni:
1 2
1 212 1 22
1
cos cos1
A A
F dA dAA r
θ θπ
= ∫ ∫
(67)
1 2
1 221 1 22
2
cos cos1
A A
F dA dAA r
θ θπ
= ∫ ∫

Capitolo 2
38
Il fatto che i corpi neri assorbono ed emettono il massimo conduce alla seguente legge di reciprocità:
1 12 2 21A F A F= (68)
Ora, per una superficie grigia i-esima, si calcolano l’emissione e la riflessione
date da: niiiii EGJ ερ += (69)
e facendo il bilancio termico sulla superficie si ottiene: ( )iiii GJAq −= (70)
Sostituendo la (69) nella (70) dopo alcuni passaggi algebrici si giunge alla:
( )inii
iii JE
Aq −
−=
εε
1 (71)
cioè il flusso termico netto uscente dalla superficie i-esima. Da notare l’analogia elettrica, come già riscontrato quando si sono trattate la conduzione e la convezione, se En-Ji viene interpretato come la differenza di potenziale ed il resto come l’inverso della resistenza elettrica (vedere la (28)). La situazione è rappresentata nella figura seguente [14].
Figura 2.15: Analogia elettrica per l’irraggiamento da superficie grigia.
Ne segue che analizzando lo scambio termico radiativo fra due superfici diffusive
opache, il flusso è dato da:
( ) ( ) ( )tot
nn
R
EE
R
JJJJFAq 21
12
212112112
−=
−=−= (72)
dove Rtot contiene il contributo delle resistenze di superficie e di passaggio:
1 2
1 1 1 12 2 2
1 11totR
A A F A
ε εε ε
− −= + + (73)

Trasmissione del calore e FEM
39
Figura 2.16: Resistenze termiche coinvolte nello scambio radiativo fra due superfici.
2.6 Metodo degli elementi finiti
Il metodo degli elementi finiti (FEM – Finite Element Method) è un metodo di soluzione numerica delle equazioni differenziali, dove l’equazione da integrare viene approssimata su porzioni del dominio chiamate appunto elementi. Per metodo di soluzione numerica si intende l’algoritmo da seguire per trovare una soluzione approssimata dell’equazione in punti discreti del dominio chiamati nodi. Il processo con cui il dominio viene suddiviso in sottodomini, o elementi, si chiama discretizzazione. La figura 2.17 riporta uno schema esemplificativo.
Figura 2.17: Esempio di suddivisione del dominio in elementi quadrangolari.
Il metodo è adottato nella stragrande maggioranza dei casi ingegneristici e fisici
vista l’impossibilità di trovare soluzioni analitiche (soluzioni esatte negli infiniti punti del dominio).
L’applicazione del metodo alla soluzione di un problema fisico o ingegneristico avviene con un processo sequenziale che comprende i seguenti passi:
1) il dominio viene suddiviso in elementi che non devono sovrapporsi ne lasciare buchi;

Capitolo 2
40
2) in base al tipo di elementi (determinato dal numero e dalla collocazione dei nodi) vengono scelte opportune funzioni di forma, le quali approssimano l’incognita all’interno degli elementi e lungo i bordi degli stessi, cioè nelle posizioni non nodali;
3) per ogni elemento viene scritta un’equazione algebrica in forma matriciale, basata su una forma integrale dell’equazione differenziale da risolvere;
4) le equazioni di ogni elemento vengono assemblate, mediante il processo di assemblaggio, in un sistema lineare valido per tutto il dominio. La soluzione di questo sistema dà il valore nodale dell’incognita;
5) il sistema lineare globale viene risolto mediante metodi di soluzione diretti o iterativi.
Va ricordato che la scelta di uno specifico tipo di elemento (in figura 2.18 ci sono alcuni esempi) in un programma software, in questo caso ANSYS, implica la scelta dell’equazione che verrà risolta, ovvero l’applicazione del metodo ad un determinato problema fisico o ingegneristico che sia.
Figura 2.18: Esempi di tipi di elementi.
Quando si discretizza il dominio, ad ogni nodo e ad ogni elemento viene
assegnato un numero di identificazione. I nodi, a loro volta, vengono identificati con due sistemi di numerazione: uno locale valido per ciascun elemento con numeri compresi fra 1 e r, dove r indica il numero di nodi presenti nell’elemento e l’altro globale con numeri compresi fra 1 e n, con n pari al numero di nodi di tutto il dominio. Il numero di ogni elemento nel sistema di riferimento globale va da 1 a m, con m il numero di elementi. La doppia numerazione dei nodi risulta utile a distinguere la formulazione dell’equazione matriciale di ciascun elemento da quella del sistema globale da risolvere.
Ad esempio, la temperatura nodale viene indicata nel seguente modo: e
it → con e tra 1 e m, i tra 1 e r quando t è riferita ai nodi dell’elemento m-esimo;
it → con i da 1 a n quando si considera il sistema globale.
L’incognita viene approssimata a tratti, elemento per elemento, sulla base dei
valori nodali eit e di apposite funzioni interpolanti eiN , chiamate funzioni di forma.

Trasmissione del calore e FEM
41
All’interno del generico elemento e monodimensionale, il valore dell’incognita alla coordinata x dell’elemento stesso risulta:
( ) ( ) ( ) ( ) ( )∑=
==++=≅r
i
eeei
ei
er
er
eee tNtxNtxNtxNxtxt1
11 ...~ (74)
dove ( )xt e~ è il valore approssimato dell’incognita, eN è il vettore riga delle
funzioni di forma e et è il vettore colonna delle incognite nodali. Sui nodi si deve avere: ( ) ( ) e
iei
ei txtxt =≅ ~
da cui ne segue la proprietà: 1)( =e
iei xN e ( ) 0=e
iej xN , ji ≠ (75)
dove e
ix sono le coordinate dell’i-esimo nodo dell’elemento e.
Deve inoltre valere la proprietà:
( )∑=
=r
i
ei xN
1
1 (76)
Dopo la fase di assemblaggio delle equazioni di ciascun elemento nel sistema
globale si ottiene l’approssimazione globale dell’incognita:
( ) ( ) ( )∑=
==≅n
iii tNtxNxtxt
1
~ (78)
e questa volta N è il vettore delle funzioni di forma globali iN , mentre t è il vettore
dei valori nodali dell’incognita a livello globale. Le funzioni di forma globali coincidono con le e
iN negli elementi che
condividono il nodo a cui si riferiscono e valgono zero negli elementi che non lo contengono.
La figura 2.19 riporta un esempio di approssimazione mediante il metodo degli elementi finiti di un caso monodimensionale in cui la soluzione esatta è data dalla funzione 21 xt −= . Il dominio è suddiviso in tre elementi e la soluzione approssimata è la t~ . Inoltre sono rappresentate anche le funzioni di forma, sia quelle dell’elemento che quelle globali [15].

Capitolo 2
42
Figura 2.19: Esempio di caso monodimensionale in cui il dominio è suddiviso in tre elementi. In basso a sinistra sono riportate le funzioni di forma dell’elemento, mentre a destra ci sono quelle globali. 2.6.1 Metodo dei residui pesati
È una variante del metodo degli elementi finiti a carattere del tutto generale [16]. Nel campo dell’analisi strutturale, per esempio, si sfrutta il principio dei lavori virtuali, che è un principio variazionale, e si costruisce il metodo basandosi su di esso. In questo caso si preferisce utilizzare un metodo più generale, il metodo dei residui pesati, che porta sempre ad una formulazione integrale dell’equazione differenziale che descrive il problema. È una procedura matematica e non un principio fisico come quello dei lavori virtuali.
L’equazione differenziale che si vuole risolvere può sempre essere messa nella forma più generale: ( ) 0=tA (79) valida nel dominio di definizione Ω (figura 2.20).
A causa della discretizzazione, la soluzione approssimata t~ in genere non soddisfa l’equazione differenziale e quindi si ha un residuo in ogni punto del dominio:
( ) 0~ ≠= tAε (80)
che indica la bontà dell’approssimazione. Al fine di rendere l’approssimazione la più
accurata possibile, un metodo sensato è quello di Figura 2.20: Dominio di definizione

Trasmissione del calore e FEM
43
imporre che si annulli l’integrale del residuo ε sul dominio Ω, e dunque:
( ) ∫∫ ΩΩ=Ω=Ω 0~ ddtA ε (81)
che è la condizione di accuratezza.
Facendo così si ha che l’equazione differenziale è soddisfatta mediamente perché ε mediamente nullo. Questa equazione da sola, però, non determina gli n valori dell’incognita in quanto sono necessarie n equazioni. Queste equazioni possono essere ottenute integrando su Ω il residuo moltiplicato per n funzioni di pesata Wi scelte in modo arbitrario. Si ottengono così n equazioni del tipo:
( ) 0~ =Ω∫Ω dtAWi (82)
Le funzioni di pesata devono rispettare le seguenti proprietà:
1) 0≠iW solo nell’intorno del nodo i-esimo al quale si riferisce, cioè pesa
il residuo solo nell’intorno del nodo i-esimo;
2) ∑=
=n
iiW
1
1 in tutti i punti del dominio Ω.
Si considera come esempio di applicazione l’equazione della conduzione in
regime stazionario con generazione interna di calore. Giusto appunto è l’equazione che viene risolta dal codice commerciale ANSYS nel problema affrontato in questa tesi.
Si ricorda che tale equazione, chiamata anche equazione di Poisson, ha la seguente forma:
( ) ( ) 0=+∇⋅∇= qttA &λ (83) Applicando il metodo dei residui pesati si avranno n equazioni del tipo:
( )∫ ∫Ω Ω=Ω+Ω∇⋅∇ 0dqWdtW ii &λ (84)
È conveniente applicare il teorema di Gauss-Green per abbassare l’ordine di
derivata. Si ricorda che il teorema dice che:
∫ ∫Ω⋅=Ω⋅∇
SdSnvdvrrr
(85)
dove S è la superficie che delimita il dominio Ω.
Ponendo tWv i ∇= λr si ottiene:
( ) ( ) ( )[ ] ∫∫ ∫ ⋅∇=Ω∇⋅∇+∇⋅∇=Ω∇⋅∇Ω Ω S iiii dSntWdtWtWdtW
rλλλλ (86)

Capitolo 2
44
Di conseguenza il primo termine dell’equazione della conduzione può essere scritto come:
( ) ( )∫ ∫∫ ΩΩ=⋅∇+Ω∇⋅∇−=Ω∇⋅∇
S iii dSntWdtWdtWrλλλ
( )∫ ∫Ω′′−Ω∇⋅∇−=
S ii dSqWdtW λ (87)
con ntq
r⋅∇−=′′ λ componente normale al contorno del flusso termico specifico. Infine l’equazione della conduzione si riduce alle seguenti n equazioni in forma
integrale:
( ) ∫∫∫ ΩΩ=Ω+′′−Ω∇⋅∇− 0~~ dqWdSqWdtW iS ii &λ (88)
dove t è stato sostituito con t~ .
Dall’applicazione delle formule di Gauss-Green si hanno due vantaggi: 1) basta che le funzioni di forma utilizzate per approssimare t siano derivabili
una volta sola e continue; 2) è agevole imporre condizioni al contorno del 2° e 3° tipo. Ci sono anche due svantaggi: 1) le funzioni di pesata devono essere derivabili una volta; 2) le equazioni sono in forma debole, cioè ammettono soluzioni t~ che sono
derivabili anch’esse una sola volta. Gli integrali sul dominio Ω possono essere calcolati come somma degli integrali
sugli elementi:
( ) ( ) dSddSdn
eSees
,,1
,, ∑∫∫=
ΩΩΩ=Ω (89)
2.6.2 Metodo di Galerkin È la variante del metodo dei residui pesati nella quale le funzioni di pesata
coincidono con le funzioni di forma: ii NW =
È possibile fare ciò in quanto le funzioni di forma soddisfano tutti i requisiti
richiesti alle funzioni di pesata. È il metodo più usato perché ha due vantaggi: 1) si ha un unico insieme di funzioni; 2) in molti casi si ottengono matrici simmetriche nel sistema di equazioni finale. Le equazioni saranno del tipo:
( )∫Ω =Ω 0~ dtANi (90)

Trasmissione del calore e FEM
45
Applicando il metodo all’equazione della conduzione in coordinate cartesiane, in due dimensioni, si ottiene:
( ) 0=+
∂∂
∂∂+
∂∂
∂∂= q
y
t
yx
t
xtA &λλ (91)
e sostituendo nella (90) si giunge all’espressione:
0=Ω
+
∂∂
∂∂+
∂∂
∂∂
∫Ω dqy
t
yx
t
xNi &λλ (92)
Utilizzando il teorema di Gauss-Green e sostituendo t~ con t si ottiene la forma
debole:
0~~~
=Ω+′′−Ω
∂∂
∂∂
+
∂∂
∂∂
− ∫ ∫∫ ΩΩ S iiii dqNdSqNd
y
t
y
N
x
t
x
N&λλ (93)
dove
∫ ∫ ∫∫ ′′+′′+′′=′′2 3 1
~~~S S S icipiS i dSqNdSqNdSqNdSqN (94)
Su S2 si hanno condizioni al contorno del II tipo con pq ′′ imposto, su S3 si hanno
condizioni al contorno del III tipo e su S1 si hanno condizioni al contorno del I tipo. Data l’espressione approssimata dell’incognita (78) si possono calcolare le
derivate lungo le coordinate x e y:
∑= ∂
∂=
∂∂ n
jj
i tx
N
x
t
1
~
(95)
∑= ∂
∂=
∂∂ n
jj
i ty
N
y
t
1
~
e di conseguenza si può scrivere:
−Ω+Ω
∂∂
∂∂
+
∂∂
∂∂
∫∫ ∑∑ ΩΩ==
dqNdty
N
y
Nt
x
N
x
Ni
n
jj
jin
jj
ji&
11
λλ
(96)
0~~2 3 1
=′′−′′−′′− ∫ ∫ ∫S S S icipi dSqNdSqNdSqN
Le (96), riscritte, assumono la forma:

Capitolo 2
46
=
Ω
∂∂
∂∂
+
∂∂
∂∂
∑ ∫=
Ω j
n
j
jiji tdy
N
y
N
x
N
x
N
1
λλ
(97)
∫ ∫ ∫∫ ′′−′′−′′−Ω=Ω 2 3 1
~~S S S icipii dSqNdSqNdSqNdqN &
che, per i = 1,…, n, costituiscono un sistema di n equazioni lineari.
Il sistema, scritto in forma matriciale, diventa: ( )132 rrrSrStK −−−=−= (98)
in cui r i sono i vettori dei flussi nodali del I, II e III tipo, K è la matrice (simmetrica) di conduzione ed S il vettore di generazione interna. Le parentesi tonde che racchiudono il vettore r1 stanno ad indicare che questo vettore non è necessario alla soluzione del problema, in quanto il valore nodale della temperatura è già imposto in questi nodi.
I generici elementi della matrice e dei vettori che compaiono nella (98) hanno le seguenti espressioni:
Ω
∂∂
∂∂
+∂
∂∂
∂= ∫Ω d
y
N
y
N
x
N
x
Nk jiji
ji λλ, (99)
∫Ω Ω= dqNS ii & (100)
( ) ∫ ′′=22 S pii dSqNr (101)
per i quali è valida la regola (89).
I flussi nodali (r3)i sono di tipo convettivo e quindi dipendono dalla temperatura della superficiale incognita t~ , essendo ( )fc ttq −=′′ ~~ α , dove α è il coefficiente di
convezione e tf è la temperatura del fluido che lambisce la superficie esterna. Pertanto si può scrivere:
( ) ( )∫ ∫ =−=′′=3 33
~~S S ficii dSttNdSqNr α
(102)
∫∫ ∑ −
=
=33
1S fiS
n
jjji dStNdStNN αα
dove si ha che:
[ ] i
n
jS jiS
n
jjji tdSNNdStNN ∑ ∫∫ ∑
==⋅=
133
1
αα
e scritto in forma matriciale:

Trasmissione del calore e FEM
47
btBr +=3 (103) in cui i termini generici delle matrici e vettori sono:
∫=3S jiij dSNNB α (104)
∫−=3S fii dStNb α (105)
per i quali vale ancora una volta la regola (89). Il sistema finale in forma matriciale ora diventa: ( ) ftHbrStBK =⇒−−=+ 2 (106)
con H simmetrica.
È da ricordare, infine, che le matrici ed i vettori presenti nella (106) sono ottenuti da quelli degli elementi mediante il processo di assemblaggio. Infatti, il calcolo degli elementi delle matrici e dei vettori viene fatto sequenzialmente elemento per elemento utilizzando gli integrali descritti su ogni elemento Ωe di contorno Se. Poi, una volta fatto ciò, si assemblano le matrici ed i vettori del sistema lineare globale.
Il sistema finale (106) viene risolto mediante algoritmi diretti od iterativi e, come già accennato, la soluzione dà il valore nodale dell’incognita [17].
2.6.3 Funzioni di forma Sono le funzioni utilizzate per approssimare l’incognita e sono di tipo
polinomiale. Il loro ordine è uguale al grado del polinomio in ciascuna coordinata e dipende dal numero di nodi di ogni elemento.
Per gli elementi monodimensionali le eiN possono essere assunte uguali a
polinomi di Lagrange di grado r-1, la cui espressione generale è:
∏≠= −
−=
r
ijj
ej
ei
eje
i xx
xxN
1
(107)
dove e
jei xx , sono le coordinate dei nodi dell’elemento.
Nella numerazione locale degli elementi monodimensionali i nodi sono numerati in ordine crescente, secondo il verso positivo dell’asse x. Gli elementi monodimensionali più usati sono lineari a due nodi e quelli parabolici a tre nodi (vedere figura 2.20).
Per r=2, i polinomi di Lagrange (107) forniscono le funzioni di forma lineari per elementi monodimensionali a due nodi, che sono:

Capitolo 2
48
e
e
ee
ee
e
e
ee
ee
L
xx
xx
xxN
L
xx
xx
xxN
1
12
11
2
12
21
−=
−−
=
−=
−−
= (108)
Per r=3, invece, la (107) fornisce funzioni di forma per elementi parabolici a tre
nodi, ovvero:
ee
e
ee
ee
ee
e
ee
ee
ee
e
ee
ee
xx
xx
xx
xxN
xx
xx
xx
xxN
xx
xx
xx
xxN
23
2
13
13
32
3
12
12
31
3
21
21
−−
−−=
−−
−−
=
−−
−−=
(109)
La figura 2.21 riporta i grafici delle funzioni di forma (108) e (109).
Figura 2.21: Funzioni di forma per elemento monodimensionale. (a) Per elemento lineare a due nodi; (b) Per elemento parabolico a tre nodi.

Trasmissione del calore e FEM
49
È conveniente introdurre una coordinata locale normalizzata di tipo baricentrico:
e
ec
L
xx −= 2ξ , 11 <<− ξ (110)
in cui xe indica la coordinata del centro ed Le la lunghezza dell’elemento (figura 2.22). Le funzioni di forma si semplificano, di conseguenza, come:
)1(
2
1
)1(2
1
2
1
ξ
ξ
+=
−=
e
e
N
N (111)
per r=2, mentre per r=3:
ξξ
ξ
ξξ
)1(2
1
1
)1(2
1
3
22
1
+=
−=
−=
e
e
e
N
N
N
(112)
Figura 2.22: Elemento monodimensionale. (a) Sistema di riferimento locale; (b) Elemento a due nodi; (c) Elemento a tre nodi.
Per gli elementi bidimensionali si utilizzano quelli di tipo triangolare o
quadrangolare, eventualmente con i lati curvilinei. Quelli quadrangolari consentono di ottenere risultati più accurati a parità di numero di nodi. Gli elementi più usati sono quelli bilineari a quattro nodi o parabolici ad otto nodi. Per convenzione, nella numerazione locale, i nodi degli elementi bidimensionali sono numerati in senso antiorario, partendo da un nodo situato in uno dei vertici.

Capitolo 2
50
Il sistema di coordinate normalizzate baricentrico ora utilizzato viene definito mediante le:
b
yy
a
xx
eC
eC
−=
−=
η
ξ ,
11
11
<<−
<<−
η
ξ (113)
la cui definizione è chiarita dalla figura 2.23.
Figura 2.23: Elemento bidimensionale. (a) Sistema di riferimento locale; (b) Elemento a quattro nodi; (c) Elemento a otto nodi.
Con l’introduzione del sistema di riferimento locale appena descritto, le funzioni di forma per l’elemento bilineare a quattro nodi hanno la forma:
)1)(1(4
1
)1)(1(4
1
)1)(1(4
1
)1)(1(4
1
4
3
2
1
ηξ
ηξ
ηξ
ηξ
+−=
++=
−+=
−−=
e
e
e
e
N
N
N
N
(114)
Una generica funzione di questo tipo è esposta in figura 2.24.

Trasmissione del calore e FEM
51
Figura 2.24: Esempio di funzione di forma per elemento bilineare bidimensionale a quattro nodi.
Le funzioni di forma per l’elemento parabolico ad otto nodi, invece, hanno la forma:
)1)(1(2
1
)1)(1)(1(4
1
)1)(1(2
1
)1)(1)(1(4
1
)1)(1(2
1
)1)(1)(1(4
1
)1)(1(2
1
)1)(1)(1(4
1
28
7
26
5
24
3
22
1
ηξ
ηξηξ
ηξ
ηξηξ
ηξ
ηξηξ
ηξ
ηξηξ
−−=
−+−+−=
+−=
−+++=
−+=
−−−+=
−+=
−−−−−=
e
e
e
e
e
e
e
e
N
N
N
N
N
N
N
N
(115)
e due esempi sono riportati in figura 2.25.
Figura 2.25: Funzioni di forma per elemento parabolico bidimensionale a otto nodi. (a) Nodo al vertice; (b) Nodo centrale di un lato.

Capitolo 2
52
Per le analisi tridimensionali vengono utilizzati elementi, sempre tridimensionali, ad otto, venti o ventisette nodi. Le funzioni di forma, ovviamente, sono più complesse. Tuttavia si tratta di difficoltà di tipo puramente matematico, perché da un punto di vista concettuale nulla cambia rispetto a quanto sopraesposto [18].

CAPITOLO 3 : IL MODELLO
In questo capitolo si tratta la descrizione del modello sviluppato per l’analisi termica di un half-stave. Inizialmente ci si sofferma sulla modellazione vera e propria, ossia sugli aspetti geometrici e sulla discretizzazione del dominio, poi ci si concentra sull’applicazione delle condizioni al contorno, o sulla fisica del problema. Inoltre verrà descritto il tipo di elemento scelto per analizzare il dispositivo, la cui scelta determina il tipo di analisi effettuata. Infine si riportano alcuni esempi di risultati di simulazioni che si possono ottenere per mezzo del modello sviluppato.
3.1 Sviluppo del modello FEM di un half-stave
L’analisi agli elementi finiti presentata è stata fatta utilizzando il codice commerciale ANSYS.
Siccome la geometria di un half-stave è già stata descritta nel capitolo 1 non ci si soffermerà sui particolari relativi ad essa. La parte di modellazione riferita alla geometria è stata creata a partire dalla definizione dei key-points (punti chiave), scelti in maniera tale da garantire l’uniformità della mesh (dominio dicretizzato in elementi). Il modello finale è un insieme di volumi adiacenti definiti dai key-points creati. Le figure 3.1 e 3.2 mostrano alcuni dettagli relativi alla modellazione geometrica.
Figura 3.1: Sviluppo di un singolo elemento riferito ad un chip con gli strati soprastanti.

Capitolo 3
54
Figura 3.2: Sviluppo dell’intero half-stave a partire dal singolo elemento rappresentato nella figura precedente.
È importante mettere in evidenza gli strati adiacenti di materiali definiti nel
modello. Si ricorda che i materiali principali, come descritto nel capitolo 1, sono cinque:
- il silicio dei chip di lettura e del sensore; - il bump bonding; - la colla inserita tra i vari strati; - l’alluminio del bus, - il kapton del bus. Le proprietà di questi cinque materiali base sono riportate nella tabella 3.1. Gli strati generati nel modello invece sono sei, dal basso verso l’alto si ha: 1) il chip di lettura; 2) il bump-bonding; 3) il sensore; 4) la colla; 5) il kapton più la colla degli strati del bus; 6) l’alluminio del bus. Gli spessori degli strati nel modello sono riassunti in tabella 3.2. La modellazione del bus, il quale è formato da 10 strati alternati di kapton e
alluminio, è stata semplificata facendo solo due strati, uno di alluminio più esterno e l’altro di kapton e colla più interno. Il kapton e la colla sono stati raggruppati dato che hanno il coefficiente di conducibilità termica dello stesso ordine di grandezza. Questa semplificazione non incide sui risultati della simulazione in quanto la resistenza termica totale del bus non varia in maniera significativa. Il bump-bonding, invece, è stato modellato aumentando lo spessore perchè altrimenti gli elementi finiti di esso avrebbero avuto un rapporto tra i lati troppo elevato, il che avrebbe causato dei problemi di natura numerica nella soluzione. Di conseguenza anche la conducibilità termica è stata aumentata in modo da mantenere la resistenza termica

Il modello
55
dello strato uguale a quella di partenza. Infatti, si ricorda che la resistenza termica di conduzione ha l’epressione seguente:
A
xR
λλ∆=
W
K
dunque, in seguito ad un aumento del valore del numeratore è necessario un’aumento di quello del denominatore perchè la resistenza resti costante. Inoltre, la conducibilità termica del bump-bonding non è isotropa siccome è formato da una serie di connessioni disposte su una superficie ed isolate una dall’altra. A causa di ciò, il calore, in questo strato, si propaga solo lungo la direzione z che è la direzione trasversale all’half-stave.
Il resto degli strati nel modello mantiene i valori reali degli spessori e conducibilità termiche isotrope.
Materiale Numero nel modello Conducibilità termica [W/mK]
Silicio 1 150
Bump-bonding 2 9
Colla 3 0.6
Kapton+colla 4 0.35
Alluminio 5 238 Tabella 3.1: Materiali utilizzati nel modello con relativo numero di identificazione e valore della conducibilità termica.
Strato Spessore [mm] Numero del materiale
Chip di lettura 0.150 1
Bump-bonding 0.100 2
Sensore 0.200 1
Colla 0.120 3
Kapton+Colla 0.142 4
Alluminio 0.135 5 Tabella 3.2: Spessore degli strati del modello con relativo materiale.
Lo strato del grounding-foil non è stato introdotto visto che lo scambio termico
verso l’esterno attraverso di esso risulta trascurabile, come d'altronde si trascura lo scambio termico con l’ambiente di tutto l’half-stave.
La figura 3.3 visualizza la geometria trasversale del modello.

Capitolo 3
56
Figura 3.3: Sezione trasversale dell’half-stave. Ogni colore identifica un tipo di materiale. Il viola chiaro corrisponde al kapton del bus, il blu all’alluminio sempre del bus, il rosso allo strato di colla, l’azzurro al silicio ed in fine il viola scuro al bump-bonding.
In figura 3.4, invece, si ha un ulteriore vista degli strati di cui è composto il modello.
Figura 3.4: Particolare della modellazione geometrica dell’half-stave.
Le pads di grasso termico non sono state modellate per mezzo di volumi. Si è preferito inglobare la loro resistenza termica conduttiva con quella convettiva, applicando così il coefficiente di scambio termico globale U, di cui si ricorda la formula, in corrispondenza delle superfici su cui sarebbero poste:
1
1−
+∆=αλ
xU
dove con ∆x si intende lo spessore della singola pad, con λ il coefficiente di conducibilità del grasso termico e con α il coefficiente di convezione nel tubicino di raffreddamento pari a 4000W/m2K.
Dopo aver completato il modello geometrico del dispositivo il secondo passo da fare è quello di discretizzare il dominio in elementi finiti ( meshing). Ciò viene fatto automaticamente da ANSYS dopo aver suddiviso ogni singola linea in un numero di segmenti a scelta. La mesh così ottenuta è riportata nelle seguenti figure 3.5 e 3.6.

Il modello
57
Figura 3.5: Particolare del modello a cui è applicata la mesh.
Figura 3.6: Vista di una parte del modello a cui è applicata la mesh.
Dalle figure si può notare la regolarità della griglia. Quando si ha una struttura regolare di questo tipo si tratta di mesh mappata. Siccome la mesh è piuttosto fitta (il numero di nodi per unità di volume è elevato) il modello risulta essere abbastanza

Capitolo 3
58
accurato da un punto di vista numerico, dato che, come è intuibile, più sono concentrati i nodi più la soluzione approssima quella analitica.
Ora restano da applicare le condizioni al contorno che nel caso corrente sono la generazione interna di calore, data dalla potenza dissipata nei chip di lettura, ed i coefficienti di scambio termico globale U descritti sopra, posti al di sotto di ciascun chip dove avviene lo scambio con il fluido refrigerante del tubicino.
Ricordando che un intero stave, in regime di funzionamento nominale, deve dissipare una potenza di 25W, si può facilmente calcolare che un singolo chip dissipa nominalmente 1.25W, visto che in ogni stave ci sono 20 chip (10 per ogni half-stave).
La generazione interna di calore rappresenta una potenza termica generata per unità di volume. Siccome la potenza è generata nei chip, perché sono attraversati da corrente elettrica, la generazione interna di calore è riferita al volume di ogni chip. In funzionamento nominale il suo valore viene calcolato tramite il seguente rapporto:
=⋅
== − 33938416621
102538.3
25.1
m
W
m
W
V
Pq
chip
n&
I coefficienti U sono funzione di due parametri, cioè U=f(∆x,α). Conoscendo i
valori di progetto si calcola un U di riferimento e lo si applica in corrispondenza di ogni area sulla quale c’è il contatto con il grasso termico. La situazione è mostrata nella figura 3.7.
Al fine di riprodurre degli andamenti di temperatura misurati sperimentalmente lungo l’half-stave, si modificano i valori di U singolarmente sotto a ciascun chip, il che viene giustificato dallo scostamento dei valori di ∆x e di α da quelli di progetto presi come riferimento.
Figura 3.7: Particolare del modello in cui sono visualizzate, tramite le righe rosse, le aree sulla quale viene applicato il coefficiente di scambio termico globale U.

Il modello
59
La temperatura dell’ambiente in cui si trova il rivelatore è stata posta pari a 22˚C e coincide con la temperatura iniziale impostata ai nodi.
Ogni altro tipo di condizione al contorno che interessa scambi termici con l’ambiente, come ad esempio la convezione naturale su tutta la superficie esterna e l’irraggiamento, vengono trascurate in quanto il loro contributo non incide significativamente sulla soluzione del problema.
Non si è interessati per il momento ai comportamenti transitori, quindi l’analisi è condotta unicamente sui regimi stazionari.
3.2 Tipo di elemento utilizzato L’elemento utilizzato per la simulazione è il SOLID70 ed è un elemento
tridimensionale a forma di parallelepipedo con otto nodi. Questo elemento permette di studiare la conduzione, infatti, come unico grado di libertà presenta il valore nodale della temperatura, inoltre, consente di simulare il flusso termico nei solidi. È utilizzabile sia per le analisi in regime stazionario che per quelle transitorie.
L’elemento SOLID70 può assumere una forma piramidale e prismatica come mostrato in figura 3.8.
Figura 3.8: Elemento SOLID70 e forme che può assumere. Ogni nodo, come si vede, è identificato da una lettera ed ogni faccia da un numero.
Le proprietà dei materiali che si possono assegnare all’elemento devono essere definite in funzione del sistema di riferimento utilizzato. Per esempio in questo caso, la conducibilità termica, se ortotropica, deve avere le componenti definite lungo gli assi del sistema di riferimento. Le grandezze che si possono definire sono, in

Capitolo 3
60
generale, le entalpie, la densità, il calore specifico e la conducibilità termica. La conducibilità termica può essere costante o funzione della temperatura. I carichi termici, o condizioni al contorno, che possono essere assegnati sono di tipo convettivo (si imposta il coefficiente di convezione su una superficie di scambio termico, o sulle facce dell’elemento), di flusso termico imposto (si imposta un flusso termico sulle superfici di scambio, o sulle facce dell’elemento) e di generazione interna di calore (si applica ai volumi, ovvero ai nodi degli elementi contenuti in un certo volume).
Come risultatati, questo elemento fornisce il valore nodale della temperatura, i gradienti termici ed i flussi termici. Il tipo di soluzione può essere visualizzato come curve isolivello identificate da un colore, o in forma vettoriale. Per esempio se si scegliesse di visualizzare il flusso termico in modalità vettoriale, ANSYS assegnerebbe un vettore ad ogni nodo [19].
3.3 Alcuni esempi di simulazione del comportamento termico
Come esempio di risultati prodotti dal modello si riportano alcune immagini della distribuzione di temperatura sulla superficie esterna dell’half-stave. Inoltre verranno mostrati alcuni esempi della distribuzione di temperatura sotto ai chip, la quale non può essere rilevata sperimentalmente attraverso analisi termografiche, ma che può essere interessante in una fase successiva per lo studio dell’invecchiamento degli half-stave (ad esempio a causa dell’essiccazione del grasso per stress termici).
Figura 3.9: Distribuzione di temperatura sulla superficie esterna dell’half-stave. La prova è stata fatta sull’half-stave 0 del settore 7.

Il modello
61
Nel caso rappresentato in figura 3.9 tutti i chip tranne lo 0 sono a potenza nominale. Il chip 0 lavora a potenza più bassa. Nella simulazione vera e propria verranno confrontati i grafici ottenuti con le temperature rilevate per mezzo di una termocamera ad infrarossi lungo sezioni del bus. In figura 3.10 si riporta un ulteriore esempio di campo termico.
Figura 3.10: Altro esempio di campo termico sviluppato sulla superficie esterna del bus.
Figura 3.11: Vista della distribuzione di temperatura sulla parte inferiore dei chip.

Capitolo 3
62
In figura 3.11 è messo in evidenza il campo termico sulla superficie inferiore del chip sulla quale viene applicato il grasso termico. Si evidenzia dove passa il tubicino di raffreddamento dalle figure “ovali” di colore più scuro rispetto alle zone circostanti., le quali sono colorate diversamente fra loro a causa del diverso coefficiente U (quindi di una temperatura locale differente).
Figura 3.12: Flusso termico all’interno dell’half-stave 0 del settore 7, in corrispondenza dei chip 1 e 2, in uno specifico caso di funzionamento.
Figura 3.13: Flusso termico all’interno dell’half-stave 0 del settore 7, in corrispondenza dei chip 0 e 1, in uno specifico caso di funzionamento.

Il modello
63
Nelle figure soprastanti è rappresentato il flusso termico all’interno del dispositivo in corrispondenza di alcuni chip.
Figura 3.14: Flusso termico nell’half-stave 2 del settore 4, in corrispondenza del chip 8, in funzionamento nominale.
Infine, la figura 3.14 visualizza il flusso termico all’interno di un half-stave con il
tubicino posizionato diversamente rispetto a quello presente nelle due figure precedenti. Si può notare come il flusso converge in una zona più spostata verso la parte esposta dei chip (posta in basso sull’half-stave in figura 3.14) rispetto al caso precedente. Ciò è dovuto al fatto di avere il tubicino posto in posizione diversa, questo perché gli half-stave appartenenti a piani differenti (si ricorda che i piani sono due) hanno il tubicino, appunto, posto in posizioni diverse per ragioni costruttive. Nulla cambia nella sostanza comunque.

Capitolo 3
64

CAPITOLO 4 : SIMULAZIONI E RISULTATI In questo capitolo vengono esposti i risultati ottenuti tramite le simulazioni effettuate con il modello descritto precedentemente. Inizialmente i risultati delle simulazioni verranno confrontati con i grafici della distribuzione di temperatura sulla superficie esterna del bus ottenuti dall’analisi termografica fatta su alcuni half-stave. Da tale confronto si ha la misura dell'approssimazione con cui il modello riproduce il comportamento termico di un dato half-stave reale in particolari regimi di funzionamento Una volta appurata la validità del modello, lo si può utilizzare sfruttando tutte le sue potenzialità per prevedere il comportamento del dispositivo in presenza di deterioramenti quali, ad esempio, il degrado del grasso termico. In questo modo si è in grado di prevedere la rilevanza di un eventuale funzionamento anomalo futuro del dispositivo in funzione dei difetti che si potranno verificare con il passare del tempo.
4.1 Confronto con i dati sperimentali Nel primo caso si prendono come riferimento i dati delle analisi termografiche
effettuate sull’half-stave 0 lato A del settore 7 del rivelatore a pixel SPD. Tramite un software apposito sono stati tracciati dei grafici rappresentanti il
profilo di temperatura su di un dato percorso tracciato sulla superficie esterna del bus, sia in direzione longitudinale all’half-stave che trasversale in corrispondenza di un chip. La figura 4.1 mostra un esempio di immagine termografica dove sono segnati i tracciati sui quali si riprende il profilo di temperatura.
Figura 4.1: Mappa termografica della superficie esterna dell’half-stave 0 lato A del settore 7 funzionante con tutti i chip a potenza nominale. Sono riportati i tre tracciati dei profili di temperatura rilevati.

Capitolo 4
66
In linea di principio, se la realtà fosse perfettamente simmetrica e ordinata, o meglio, se si riuscisse a realizzare il dispositivo precisamente come da progetto, il profilo di temperatura lungo l’half-stave avrebbe un andamento simmetrico e pressappoco costante. A causa delle tolleranze meccaniche nella lavorazione dei supporti e negli incollaggi del rivelatore e a causa di una non perfettamente uniforme distribuzione di temperatura nel tubicino, la temperatura può variare entro pochi gradi (2-3) da un estremo all’altro della superficie del bus. Un esempio è riportato in figura 4.2 relativa al percorso 1 della figura precedente.
Figura 4.2: Esempio di profilo di temperatura rilevato sperimentalmente. Il grafico è ricavato dal percorso 1 dell’immagine in figura 4.1.
Per ricostruire un andamento simile con il modello agli elementi finiti bisogna,
prima di tutto, cercare di individuare quali sono i parametri che possono influenzare il fenomeno. Come già detto nel capitolo precedente, i parametri fisici di cui si è tenuto conto nello svolgimento delle simulazioni sono: la generazione interna di calore nei chip ed i coefficienti di scambio termico U con il fluido di raffreddamento, che sono funzione dello spessore della singola pad di grasso termico e del coefficiente di convezione, cioè U=f(∆x,α). Ciò implica, in conclusione, che i parametri su cui bisogna lavorare sono essenzialmente tre, ossia:
- la potenza dissipata in ciascuno dei dieci chip; - lo spessore della singola pad di grasso termico sottostante a ciascun chip; - il valore locale del coefficiente di scambio termico convettivo nel tubicino di
raffreddamento. Questi tre parametri hanno dei valori di progetto, ma, come già menzionato, i
valori reali possono discostare da questi. Non è detto che ogni chip dissipi esattamente 1.25W in funzionamento nominale, come non è neanche detto che ciascuna pad di grasso termico abbia lo stesso spessore ad ogni locazione. Infatti il singolo chip può dissipare potenze leggermente diverse (+/- 10%) dalla nominale (1.25W) e le pad di grasso termico possono avere spessori diversi. Anche il coefficiente di convezione, siccome la termofluidodinamica del fluido bifase è complicata, non è detto che abbia proprio lo stesso valore, considerato costante, in ogni punto del tubo sottostante all’half-stave.
Individuati i parametri da mettere a punto, agendo sulla imposizione dei carichi sul modello si procede a riprodurre l’andamento delle temperature ricavato dalle misure.
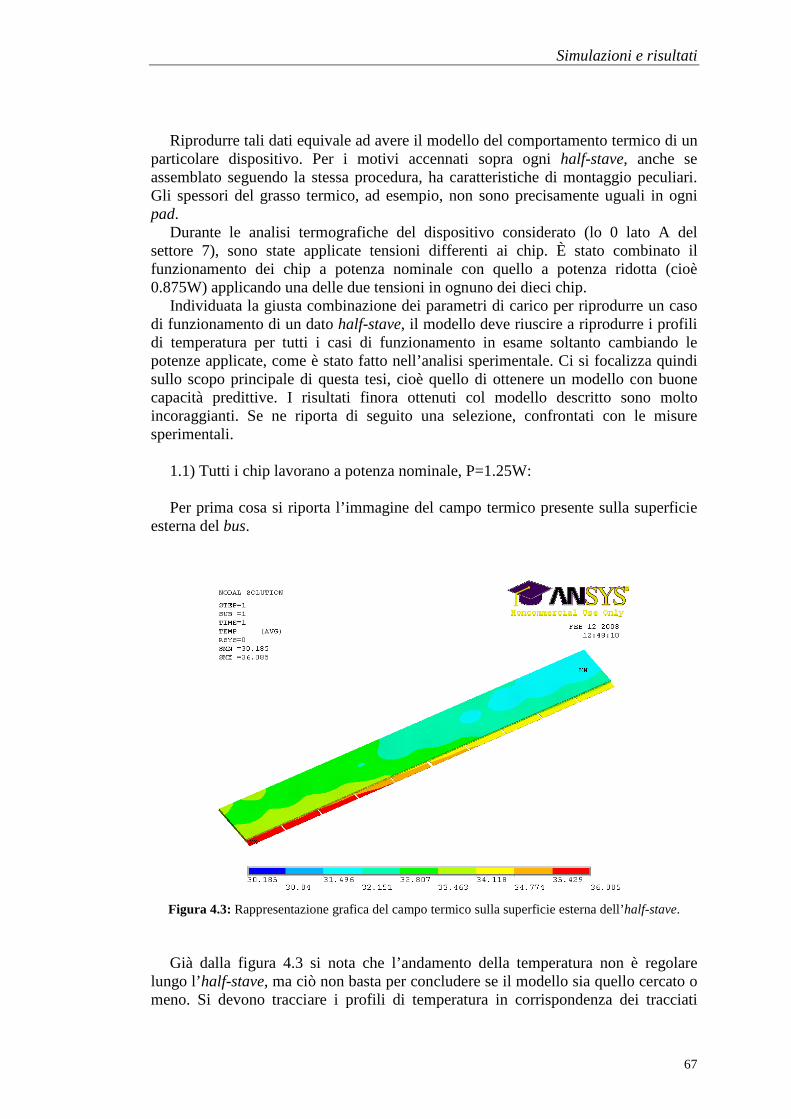
Simulazioni e risultati
67
Riprodurre tali dati equivale ad avere il modello del comportamento termico di un particolare dispositivo. Per i motivi accennati sopra ogni half-stave, anche se assemblato seguendo la stessa procedura, ha caratteristiche di montaggio peculiari. Gli spessori del grasso termico, ad esempio, non sono precisamente uguali in ogni pad.
Durante le analisi termografiche del dispositivo considerato (lo 0 lato A del settore 7), sono state applicate tensioni differenti ai chip. È stato combinato il funzionamento dei chip a potenza nominale con quello a potenza ridotta (cioè 0.875W) applicando una delle due tensioni in ognuno dei dieci chip.
Individuata la giusta combinazione dei parametri di carico per riprodurre un caso di funzionamento di un dato half-stave, il modello deve riuscire a riprodurre i profili di temperatura per tutti i casi di funzionamento in esame soltanto cambiando le potenze applicate, come è stato fatto nell’analisi sperimentale. Ci si focalizza quindi sullo scopo principale di questa tesi, cioè quello di ottenere un modello con buone capacità predittive. I risultati finora ottenuti col modello descritto sono molto incoraggianti. Se ne riporta di seguito una selezione, confrontati con le misure sperimentali.
1.1) Tutti i chip lavorano a potenza nominale, P=1.25W: Per prima cosa si riporta l’immagine del campo termico presente sulla superficie
esterna del bus.
Figura 4.3: Rappresentazione grafica del campo termico sulla superficie esterna dell’half-stave. Già dalla figura 4.3 si nota che l’andamento della temperatura non è regolare
lungo l’half-stave, ma ciò non basta per concludere se il modello sia quello cercato o meno. Si devono tracciare i profili di temperatura in corrispondenza dei tracciati

Capitolo 4
68
presenti in figura 4.1. La figura seguente riporta gli andamenti prodotti con ANSYS confrontati con i relativi casi reali.
Figura 4.4: Confronto fra i profili di temperatura presi sui tracciati di figura 4.1. A sinistra ci sono quelli sperimentali mentre a destra quelli calcolati con ANSYS.
I grafici ricavati dalla simulazione riproducono l’andamento dei dati sperimentali.
Il fatto che le scale di temperature siano diverse indica che le semplificazioni adottate portano ad avere una temperatura media più elevata di quella che si misura nelle prove. Attualmente il rivelatore è stato installato e non è più accessibile per le misure termografiche. Però, la temperatura media viene misurata da dieci PT1000 in due

Simulazioni e risultati
69
“daisy chain” 5+5 con lettura mediata incorporate su ciascun half-stave ed i valori che si leggono sono vicini a quelli della simulazione.
Bisogna mettere in evidenza che il calo improvviso di temperatura osservabile all’estrema destra dei grafici sperimentali è dovuto al fatto che nel campo inquadrato dalla termocamera è stata inclusa una porzione di half-stave più ampia della dimensione dei dieci chip, quindi l’estremo del profilo corrisponde a una zona dove non è dissipata potenza.
1.2) Il chip 0 funziona a potenza ridotta (P=0.875W) mentre il resto è a potenza
nominale:
Figura 4.5: Mappa termografica reale (sopra) e ottenuta dalla simulazione (sotto). I chip sono numerati a partire dallo 0 da destra a sinistra.

Capitolo 4
70
Come ci si poteva aspettare, la temperatura più bassa si riscontra in corrispondenza del chip 0. Ad una minor dissipazione di potenza deve corrispondere una generazione interna di calore più bassa, quindi, una temperatura più bassa nella zona adiacente a dove viene dissipata questa potenza. I grafici seguenti mostrano, a differenza di quelli di figura 4.4, la valle nel profilo di temperatura in prossimità del chip 0.
Figura 4.6: Confronto fra i profili di temperatura presi sui tracciati di figura 4.5. A sinistra ci sono quelli sperimentali mentre a destra quelli simulati con ANSYS.
L’andamento trasversale al chip 0, quello del tracciato 3 di figura 4.5 non è stato
riportato in quanto il suo confronto non è fondamentale nella verifica del funzionamento del modello.
Anche in questo caso, con lo stesso modello di prima, i dati sperimentali sono stati riprodotti con buona approssimazione.
Le considerazioni fatte per il valore medio di temperatura valgono anche per questo caso e per tutti quelli che seguono.
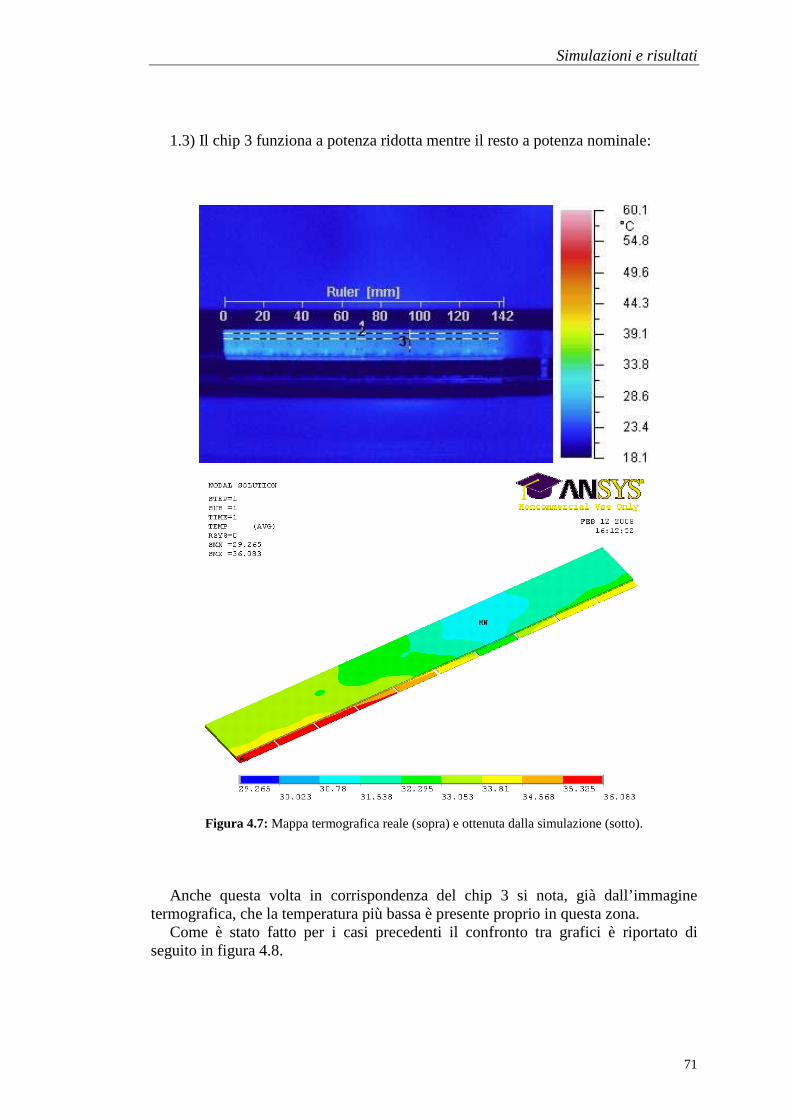
Simulazioni e risultati
71
1.3) Il chip 3 funziona a potenza ridotta mentre il resto a potenza nominale:
Figura 4.7: Mappa termografica reale (sopra) e ottenuta dalla simulazione (sotto).
Anche questa volta in corrispondenza del chip 3 si nota, già dall’immagine termografica, che la temperatura più bassa è presente proprio in questa zona.
Come è stato fatto per i casi precedenti il confronto tra grafici è riportato di seguito in figura 4.8.

Capitolo 4
72
Figura 4.8: Confronto fra i profili di temperatura presi sui tracciati di figura 4.7. A sinistra ci sono quelli sperimentali mentre a destra quelli simulati con ANSYS.

Simulazioni e risultati
73
1.4) Il chip 6 funziona a potenza ridotta mentre il resto è a potenza nominale: Nei due casi che seguono valgono tutte le considerazioni fatte nei casi precedenti.
I risultati sono visualizzati nelle figure seguenti (figura 4.9, 4.10, 4.11 e 4.12).
Figura 4.9: Mappa termografica reale (sopra) e ottenuta dalla simulazione (sotto).

Capitolo 4
74
Figura 4.10: Confronto fra i profili di temperatura presi sui tracciati di figura 4.9. A sinistra ci sono quelli sperimentali mentre a destra quelli simulati con ANSYS.

Simulazioni e risultati
75
1.5) Il chip 9 funziona a potenza ridotta mentre il resto è a potenza nominale:
Figura 4.11: Mappa termografica reale (sopra) e ottenuta dalla simulazione (sotto).

Capitolo 4
76
Figura 4.12: Confronto fra i profili di temperatura presi sui tracciati di figura 4.11. A sinistra ci sono quelli sperimentali mentre a destra quelli simulati con ANSYS.

Simulazioni e risultati
77
1.6) Il chip 7 funziona a potenza nominale mentre il resto è a potenza ridotta: A differenza dei casi precedenti, in questa prova un solo chip lavora a potenza più
elevata degli altri, dunque, in questo caso ci si aspetta di trovare un picco di temperatura in prossimità del chip 7, (figura 4.14).
Figura 4.13: Mappa termografica reale (sopra) e ottenuta dalla simulazione (sotto).

Capitolo 4
78
Figura 4.14: Confronto fra i profili di temperatura presi sui tracciati di figura 4.13. A sinistra ci sono quelli sperimentali mentre a destra quelli simulati con ANSYS.
Per ottenere i risultati sopraesposti sono state applicate al modello le seguenti
condizioni al contorno: - chip0 e 1: coefficiente di scambio termico globale pari a 3600[W/m2K]; - chip2 e 3: coefficiente di scambio termico globale pari a 3500[W/m2K]; - chip 4: coefficiente di scambio termico globale pari a 3400[W/m2K]; - chip 5: coefficiente di scambio termico globale pari a 3300[W/m2K]; - chip 6, 7 ,8 e 9: coefficiente di scambio termico globale pari a 3200[W/m2K]. Le potenze dissipate in funzionamento nominale sono: - dal chip 0 al 6: P=Pn=1,25W; - il resto dissipa un pochino in più: P=1,3W. La variazione del coefficiente di scambio termico globale da chip a chip è stata
introdotta per riprodurre diversi spessori di grasso termico, che incidono sulla resistenza termica alla conduzione, e una diversa efficienza del fluido dovuta all’evaporazione e alla perdita di carico lungo il tubicino. Le variazioni del coefficiente di convezione sono poco significative lungo il tratto di tubicino passante per lo stesso dispositivo.
Ora verranno riportati altri due esempi dei quali si evidenzierà solo il caso a
potenza nominale.

Simulazioni e risultati
79
2) Half-stave 2 lato A del settore 4:
Figure 4.15: Mappa termografica reale (sopra) e ottenuta dalla simulazione (sotto).
Si ha disposizione soltanto un profilo di temperatura a differenza del caso precedente (figura 4.16).

Capitolo 4
80
Figura 4.16: Confronto fra i grafici del profilo di temperatura preso sul tracciato di figura 4.15. A sinistra c’è quello rilevato sperimentalmente mentre a destra quello simulato con ANSYS.
Anche in questo caso il modello funziona in quanto riproduce bene il profilo di
temperatura in esame. La parte iniziale del grafico a sinistra in figura 4.16 non deve essere considerata in quanto corrisponde ad un tratto dell’half-stave che non costituisce la parte in esame.
Per ottenere questo nuovo modello, le condizioni al contorno che sono state applicate sono:
- chip0 e 9: coefficiente di scambio termico globale pari a 3500[W/m2K]; - chip1 e 3: coefficiente di scambio termico globale pari a 3300[W/m2K]; - chip 2: coefficiente di scambio termico globale pari a 3200[W/m2K]; - chip 4,5,6,7 e 8: coefficiente di scambio termico globale pari a 3400[W/m2K]. Le potenze dissipate in funzionamento nominale sono: - chip 0, 6, 7, 8 e 9: P=Pn=1,26W; - chip 1,2 e 3: P=1,4W; - chip 4 e 5: P=1,3W. Le variazioni delle condizioni al contorno sono dovute alle ragioni
precedentemente descritte. 3) Half-stave difettoso del settore 3: Il prossimo modello simula il comportamento termico anomalo di un half-stave
del settore 3. Questo comportamento è stato riscontrato durante le verifiche fatte ai dieci settori dell’SPD. Nella regione del ladder corrispondente ai chip 1, 2 e 3 la temperatura raggiunge valori che arrivano ben oltre a quelli constatati nel corretto funzionamento di un dispositivo. In questa zona la temperatura supera i 50˚C come si può notare dalla figura 4.17. In figura 4.18 si ha il confronto tra i profili di temperatura.

Simulazioni e risultati
81
Figura 4.17: Mappa termografica reale (sopra) e ottenuta dalla simulazione (sotto).
Figura 4.18: Confronto fra i grafici del profilo di temperatura lungo la superficie del bus di un half-stave del settore 3. A sinistra c’è quello rilevato sperimentalmente mentre a destra quello simulato con ANSYS. I grafici sono simmetrici soltanto perché le ascisse sono state prese una opposta all’altra.

Capitolo 4
82
Per riprodurre questo comportamento difettoso dell’half-stave del settore 3 in questione è stato diminuito il coefficiente di scambio termico globale del grasso termico in modo da tenere conto del solo effetto della convezione con l’aria. In questo modo non si ha più il contributo della resistenza termica conduttiva e ciò equivale all’assenza del grasso termico stesso nei chip 1, 2, e 3. Si sarebbe potuto tenere il valore del coefficiente U più alto di quello che considera solo convezione con l’aria sottostante ai chip così da inglobare, anche se in maniera poco accurata, l’effetto dello scambio termico radiativo tra due superfici a temperatura differente, ovvero quella inferiore del chip e quella del tubicino di raffreddamento.
Il modello sembra riprodurre l’andamento rilevato dalla mappa termografica con buona approssimazione come mostrato in figura 4.18. In corrispondenza del chip 2, dove si trova il picco nel grafico, la simulazione dà qualche grado in più. Ciò è dovuto essenzialmente al fatto di non aver simulato lo scambio radiativo in modo accurato. Sono state sfruttate le condizioni al contorno implementate negli altri modelli, come già detto intervenendo solo sul coefficiente di scambio termico globale U. Sebbene il modello sia sempre un’approssimazione della realtà dove vengono fatte diverse semplificazioni, il motivo principale della piccola discrepanza tra i dati si può giustificare con il motivo appena citato.
La figura 4.19 mostra un particolare del flusso termico sui chip 2, 3 e 4.
Figura 4.19: Flusso termico in corrispondenza dei chip 2, 3 e 4.

Simulazioni e risultati
83
4.2 Previsioni del comportamento termico con deterioramento del grasso termico
Al fine di prevedere il comportamento termico di un half-stave in presenza di un
deterioramento del grasso termico è stato utilizzato il primo modello presentato, quello relativo al chip 0 lato A del settore 7.
Il grasso termico, con il passare del tempo, tende ad essicarsi o a volatilizzare e di conseguenza a non essere più in grado di condurre il calore che fluisce dai chip verso il fluido di raffreddamento con la stessa efficienza. La zona di ciascuna pad che si essiccherà, o che volatilizzerà, per prima sarà quella più esterna, ovvero quella a contatto con l’aria. Ciò equivale ad una riduzione dell’area della pad stessa, area attraverso cui fluisce il calore da smaltire. Di conseguenza la resistenza termica di conduzione diventa più grande.
Nel modello agli elementi finiti questo effetto viene semplicemente simulato riducendo in maniera opportuna l’area sulla quale è applicato il coefficiente di scambio termico globale. Non serve andare ad intervenire sui carichi applicati ma soltanto sulla geometria. A questo scopo è stata introdotta una parametrizzazione nel modello in modo da definire l’area della pad in funzione della percentuale di grasso termico deteriorato. Per essere più precisi, i quattro lati del rettangolo azzurro di figura 4.20 devono accorciarsi in egual misura.
Figura 4.20: Immagine della parte base geometrica del modello. Il rettangolo azzurro rappresenta l’area sulla quale si applica il coefficiente di scambio termico globale ed è quella che verrà ridotta al diminuire della percentuale di grasso termico ancora funzionante.
Le simulazioni sono state fatte diminuendo di volta in volta del 10% l’area, a
partire da 90% di grasso rimasto fino ad arrivare al 10%. Per ogni prova è stato tracciato un profilo di temperatura, sempre sulla superficie esterna del bus, ed è stata

Capitolo 4
84
creata una mappa termografica per avere un’idea di che forma assumerà il campo termico sviluppato. In questo modo si riuscirà a sapere quali valori può raggiungere la temperatura media lungo l’half-stave al consumarsi del grasso termico.
Nella figura 4.21 sono riportate le prime sei mappe termografiche ricavate con il modello.
Figura 4.21: Mappe termografiche della superficie esterna dell’half-stave deteriorato. Partendo in alto da sinistra si ha: 10% di grasso termico consumato, 20%, 30%, 40%, 50% e 60%.
Come si nota dalla figura 4.21 le distribuzioni di temperatura sulla superficie
esterna non sembrano variare molto fino ad un deterioramento pari al 60% di grasso termico. L’effetto della mancanza di grasso si manifesta come innalzamento della temperatura media sull’half-stave.
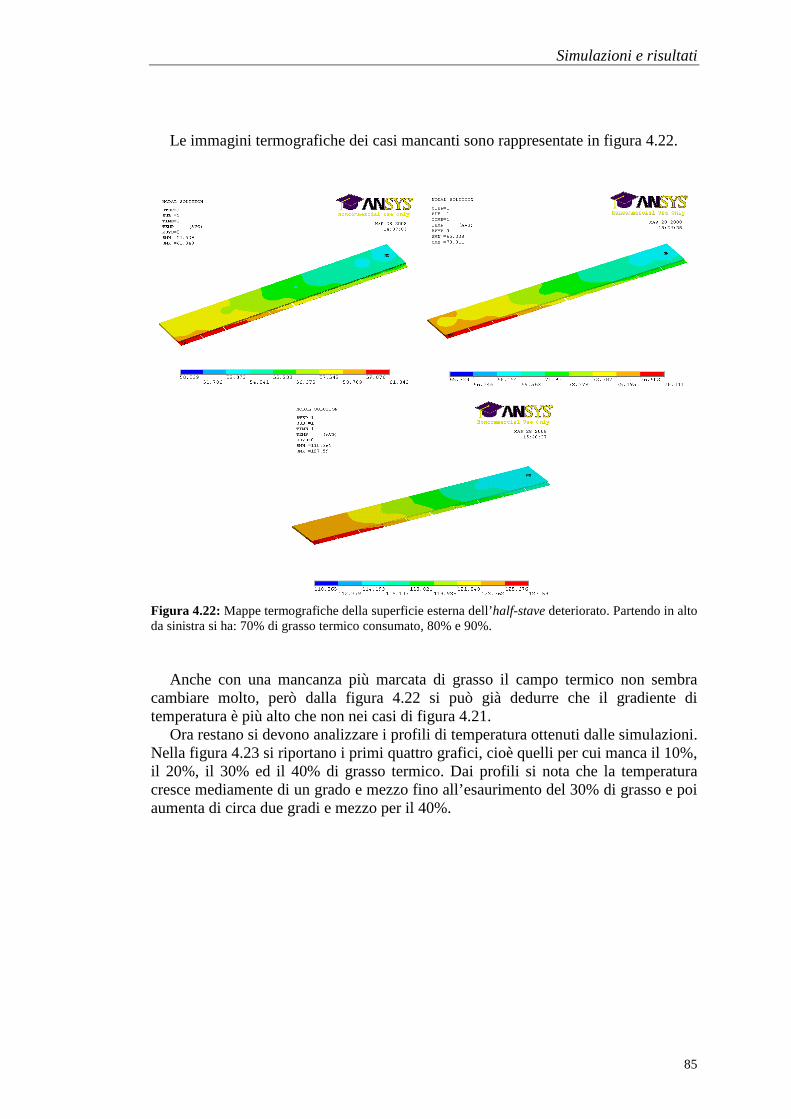
Simulazioni e risultati
85
Le immagini termografiche dei casi mancanti sono rappresentate in figura 4.22.
Figura 4.22: Mappe termografiche della superficie esterna dell’half-stave deteriorato. Partendo in alto da sinistra si ha: 70% di grasso termico consumato, 80% e 90%.
Anche con una mancanza più marcata di grasso il campo termico non sembra
cambiare molto, però dalla figura 4.22 si può già dedurre che il gradiente di temperatura è più alto che non nei casi di figura 4.21.
Ora restano si devono analizzare i profili di temperatura ottenuti dalle simulazioni. Nella figura 4.23 si riportano i primi quattro grafici, cioè quelli per cui manca il 10%, il 20%, il 30% ed il 40% di grasso termico. Dai profili si nota che la temperatura cresce mediamente di un grado e mezzo fino all’esaurimento del 30% di grasso e poi aumenta di circa due gradi e mezzo per il 40%.

Capitolo 4
86
Figura 4.23: Profili di temperatura calcolati sulla superficie esterna del bus. Partendo in alto da sinistra si ha: 10% di grasso termico consumato, 20%, 30% e 40%.
L’innalzamento della temperatura in questi casi è poco marcato, nei casi seguenti si noteranno delle variazioni molto più significative. I seguenti quattro casi sono evidenziati in figura 4.24.

Simulazioni e risultati
87
Figura 4.24: Profili di temperatura sulla superficie esterna del bus ottenuti tramite la simulazione. Partendo in alto da sinistra si ha: 50% di grasso termico consumato, 60%, 70% e 80%.
Ulteriori tre gradi e mezzo di temperatura vengono aggiunti quando il grasso
termico scende al 50%, altri cinque al 60%, altri nove al 70% ed altri sedici all’80%. Infine, il caso più grave simulato, quello con 90% di grasso inefficiente (figura
4.25), presenta una temperatura media attorno ai 120˚C ed una differenza di temperatura di 10˚C da un capo all’altro dell’half-stave.
Figura 4.25: Profilo di temperatura sulla superficie esterna del bus. Caso con 10% di grasso termico rimasto.

Capitolo 4
88
Per avere una rappresentazione più tangibile degli effetti che si hanno sulla temperatura in funzione del deterioramento del grasso termico è stato costruito un grafico che riporta la temperatura media in funzione sempre della parte di grasso deteriorata (figura 4.26). Come valore della temperatura media è stato preso quello al centro del profilo, che sembra approssimare abbastanza bene questo valore.
0
20
40
60
80
100
120
140
0 20 40 60 80 100
Grasso termico deteriorato [%]
Tm
[˚C]
Figura 4.26: Andamento della temperatura media sulla superficie esterna del bus in funzione della percentuale di grasso termico deteriorata.
La curva della temperatura media rappresentata nella figura 4.26 sembra avere un
andamento esponenziale. Gli effetti più marcati incominciano a manifestarsi oltre il 50% di grasso consumato.
È interessante anche avere una rappresentazione del flusso termico sviluppato in una delle configurazioni descritte, come esempio si è preso quello al 20% di grasso termico rimasto e le figure seguenti (4.27, 4.28 e 4.29) mostrano alcuni particolari.

Simulazioni e risultati
89
Figura 4.27: Flusso termico in corrispondenza del chip 3.
Figura 4.28: Vista laterale del flusso termico sviluppato nell’half-stave. È messo in evidenza come il flusso si incanala al di sotto dei chip per poi dirigersi all’esterno verso il tubicino di raffreddamento.

Capitolo 4
90
Figura 4.29: Altro particolare del flusso termico uscente dal fondo di un chip dell’half-stave.

CONCLUSIONI Nel lavoro esposto in questa tesi è stato costruito un modello, basato sul metodo
agli elementi finiti, del comportamento termico degli elementi base del rivelatore a pixel SPD dell’ITS dell’esperimento ALICE. Lo scopo dell’analisi effettuata è quello di riuscire a realizzare un modello che simuli il comportamento di alcuni specifici half-stave reali, dei quali è stato misurato il comportamento termico. Inoltre, per mezzo del modello creato, sono state fatte delle previsioni sul futuro funzionamento in presenza di deterioramento del grasso termico, in cui lo scambio termico con l’impianto di raffreddamento risulta poco efficiente.
Il modello è stato sviluppato utilizzando il metodo degli elementi finiti per mezzo del codice commerciale ANSYS. Le analisi sono sempre state condotte su di un intero half-stave, elemento base del rivelatore. La modellazione del dispositivo, pur introducendo opportune semplificazioni, permette di ricostruire con buona approssimazione la distribuzione di temperatura misurata sulla superficie esterna del bus per la trasmissione dei dati.
Per realizzare il modello sono stati inizialmente individuati i parametri che hanno maggiore incidenza sulla caratterizzazione del comportamento termico di uno specifico half-stave, parametri sia fisici che costruttivi. Fatto questo, lo sviluppo del modello è stato affrontato variando i valori dei parametri, in intervalli suggeriti dall'esperienza dei test col rivelatore, fino a trovare risultati confrontabili con quelli sperimentali e senza allontanarsi eccessivamente dai valori nominali dei parametri stessi. Ciò ha permesso di avere sotto controllo i fattori che caratterizzano un determinato dispositivo e di motivare l’andamento dei profili di temperatura osservati, che si discostano dall’andamento pressapoco costante che ci si aspetta di trovare in base ai dati progettuali del sistema. La conclusione principale cui si è giunti è che la causa principale dei profili termici misurati, risiede nelle variazioni di spessore, ancorché piccole, del grasso termico al di sotto dei diversi chip di un medesimo half-stave. Una seconda causa, anche se meno importante, va individuata nella leggera variazione di dissipazione di calore, sempre da chip a chip.
Con il rivelatore installato presso il CERN l’unico dato che si riesce a monitorare continuamente, tramite delle PT1000, è il valore della temperatura media sulla superficie esterna (bus) del singolo dispositvo. Tale valore si aggira attorno ai 32°C ed essendo molto vicino al valore ottenuto tramite le simulazioni, dà un’ulteriore conferma della validità, bontà e dell’accuratezza del modello.
Altro fatto interessante è che si riescono ad ottenere gli effetti prodotti da un’half-stave caratterizzato da un difetto di assemblaggio, che presentava una temperatura di circa 27°C superiore alla norma in corrispondenza a tre chip situati in uno dei due ladder costituenti l’half-stave. Attribuendo tale comportamento con l’assenza di contatto termico con l’impianto di raffreddamento al di sotto dei tre chip, i risultati che si ottengono riproducono in maniera piuttosto precisa l’andamento del profilo di temperatura misurato.
L’impianto di raffreddamento descritto in questo lavoro è stato realizzato per mantenere una temperatura pressoché costante, tra i 25°C e i 30°C. Se il contatto tra i chip che dissipano calore ed il tubicino in cui scorre il freon per il raffreddamento peggiorasse (ciò si traduce in una degradazione, o consumo, del grasso termico) il

Conclusioni
92
valore della temperatura crescerebbe. A tale proposito è stata sfruttata la potenzialità del modello per prevedere i valori medi di temperatura sul bus in presenza di un contatto termico deteriorato. Tramite le simulazioni è stata ottenuta una curva della temperatura media in funzione della percentuale di grasso termico che in futuro potrebbe venire a mancare, sia a causa dell’essicazione della stessa, sia perchè il materiale ha la tendenza a volatilizzare. I risultati mostrano che l’aumento della temperatura è tollerabile fino al consumo del 30-40% di grasso termico.

BIBLIOGRAFIA [1] http://aliceinfo.cern.ch/ [2] ALICE Collaboration, “ALICE Technical Paper1”, 10 Febbraio 2008 [3] Autori vari, “The Assembly of the first sector of the ALICE Silicon Pixel
detector”, Journal of Physics [4] A. Pepato et al., “The mechanics and cooling system of the ALICE silicon
pixel detector”, Nuclear Instruments and Methods in Physics Research [5] M.A. Pimenta dos Santos, “The ALICE Silicon Pixel Detector cooling
system”, 19 Febbraio 2003 [6] Capitolo 2.1, John H. Lienhard IV / John H. Lienhard V, “A Heat Transfer
Textbook”, 3rd ed., Phlogiston Press, Cambridge Massachusetts [7] Capitolo 2, G. Comini (a cura di), “Fondamenti di termofluidodinamica
computazionale”, SGEditoriali, Padova [8] G. Cortella, “Appunti del corso di trasmissione del calore, A.A. 2003/04”,
Facoltà di Ingegneria, Università degli studi di Udine [9] ibidem, G. Cortella, “Appunti del corso di trasmissione del calore, A.A.
2003/04”, Facoltà di Ingegneria, Università degli studi di Udine [9] G. Comini, “Fondamenti di termofluidodinamica computazionale”,
SGEditoriali, Padova [10] H. Aucher, “Evaporation of refrigerants in tubes”, Proc. Heat Exchanger
Technology, Centre for Renewable Energy Sources, Athen, May 1993 [11] Capitolo 11.3, G. Comini / G. Cortella, “Fondamenti di trasmissione del
calore”, SGEditoriali, Padova [12] ibidem, Capitolo 11.4, G. Comini / G. Cortella, “Fondamenti di trasmissione
del calore”, SGEditoriali, Padova [13] ibidem, Capitolo 11.5, G. Comini / G. Cortella, “Fondamenti di trasmissione
del calore”, SGEditoriali, Padova [14] ibidem, G. Cortella, “Appunti del corso di trasmissione del calore, A.A.
2003/04”, Facoltà di Ingegneria, Università degli studi di Udine [15] ibidem, Capitolo 4.2, G. Comini (a cura di), “Fondamenti di
termofluidodinamica computazionale”, SGEditoriali, Padova [16] ibidem, Capitolo 4.3, G. Comini (a cura di), “Fondamenti di
termofluidodinamica computazionale”, SGEditoriali, Padova [17] ibidem, Capitolo 4.3.1, G. Comini (a cura di), “Fondamenti di
termofluidodinamica computazionale”, SGEditoriali, Padova [18] ibidem, Capitolo 4.5, G. Comini (a cura di), “Fondamenti di
termofluidodinamica computazionale”, SGEditoriali, Padova [19] ANSYS 11.0 documentation, fornito con il software

Bibliografia
94

RINGRAZIAMENTI
Le prime persone da ringraziare per la stesura di questa tesi sono: Francesca Soramel, la mia relatrice, che è sempre stata a disposizione sin dall’inizio e nonostante tutti i suoi impegni ha sempre trovato tempo da dedicarmi per la buona riuscita dell’elaborato; Rosario Turrisi, uno dei miei due correlatori, che si è sempre interessato a questo lavoro e che mi è stato da guida durante tutta la fase di sviluppo della tesi; Adriano Pepato, l’altro mio correlatore, che grazie ai suoi consigli da ingegnere ed al tempo che mi ha dedicato mi ha consentito di sviluppare il modello nel migliore dei modi e di procedere con il lavoro nel modo più corretto ed efficacie. Inoltre ringrazio Luca T., compagno di università anche lui tesista in questo periodo, con cui ho trascorso in università tutti i giorni dedicati allo svolgimento di questo lavoro…senza dimenticare gli spritz insieme!
I ringraziamenti che seguono sono rivolti a coloro che mi hanno supportato e probabilmente sopportato durante tutti questi anni: mio papà Gerardo e mia mamma Roberta senza dei quali non sarei mai stato in grado di arrivare fin qua; mia nonna Diana; i miei fratelli Marco, Gabriella e Roberto; mio zio Brendan e mia zia Gianna che non hanno esitato ad invitarmi a stare da loro da quando sono venuto a Udine; le mie cugine Kate e Joanne; i miei zii Maria e Pino e zia Elena.
Ora ringrazio tutti i miei compagni di percorso con cui ho trascorso questi ultimi due anni di università (e con molti anche i precedenti), di cui, per non farla troppo lunga, ricordo coloro con cui ho passato la maggior parte del tempo: Claudio B., Paolo A., Luca T., Fabio P., Antonio B., Max F., Claudio M., Carlo C., Fabio B., Andrea B., Michele B., Claudio R..
Infine vengono tutti i miei amici di cui non riporto i nomi perché sono troppi!!!