tesis 20112013 final
DESCRIPTION
tesis de 300TRANSCRIPT

INSTITUTO POLITÉ CNICO NACIONAL
UNIDAD PROFESIONAL ADOLFO LOPEZ MATEOS
Sección de Estudios de Posgrado e Investigación
Escuela Superior de Ingeniería Mecánica y Eléctrica
TESIS
Presentada para obtener el grado de
MAESTRO EN CIENCIAS EN INGENIERIA DE TELECOMUNICACIONES
PRESENTA:
Ing. Jesús Francisco Reyes Díaz
Investigación del Procedimiento de muestreo – Cuantificación – Reconstrucción de los
Procesos Gaussianos
Dirigida por
Dr. Vladimir V. Kazakov
México, D.F. 20 de Noviembre de 2013
2
Resumen
Actualmente los sistemas de comunicación interactúan en nuestro entorno de manera casi
imperceptible. La evolución del hombre ha llevado consigo el perfeccionamiento en la forma de
comunicarse, esto con el fin de poder llevar un mensaje de un lugar a otro, hoy en día es posible
comunicarnos rápida y confiablemente de un extremo a otro del planeta.
En la base de los sistemas de comunicación hemos investigado una parte importante dentro del
proceso de comunicación, del cual se puede extraer un conjunto de características que nos
permitirán visualizar hacia dónde vamos respecto al futuro de los sistemas de comunicación, así
como el desarrollo y mejoras aplicables a los mismos para optimizar la calidad de nuestros
sistemas.
La base de nuestra investigación este cimentado sobre la teoría de la esperanza matemática
condicional, la cual nos ofrece un tema poco estudiado en el ámbito del estudio del
procedimiento de muestreo-cuantificación-reconstrucción, dicha teoría se desarrolla a través de
métodos estadísticos los cuales nos dan un panorama general del comportamiento de nuestro
proceso. Los conjuntos de realizaciones que pueden generarse dentro de un proceso son variados
podría decirse que se comporta como procesos infinitos, es por eso que se busca un método que
evalué estos procesos y los trate de una forma que se aproveche el máximo desempeño de dichos
procesos.
El algoritmo óptimo de un sistema de comunicacion se basa en definir sus principales
características, como parte importante dentro de este trabajo se estudió a fondo la función de
cuantificación en el tiempo y en diferentes niveles, los cuales aplican un error de reconstrucción
que no siempre será igual a cero.
Para poder desarrollar nuestras simulaciones se llevó a cabo un conjunto de programas
desarrollados sobre la plataforma de Matlab©, en la cual se obtuvieron diversos resultados los
cuales se muestran en la presente tesis.

3
Abstract
Currently the communication systems interact in our environment almost imperceptibly. The human
evolution has involved the improvement in the way people communicate, this in order to convey a
message from one place to another, it is now possible to communicate quickly and reliably from
one end to another planet.
On the basis of the communication systems we have investigated an important part of the
communication process, which can extract a set of features that allow us to see where we are going
for the future of communication systems and the development and improvement applicable to them
to ensure the quality of our systems.
The basis of our research is grounded on the theory of conditional expectation, which gives us a
little studied topic in the field of sampling procedure-quantization-reconstruction, this theory is
developed through statistical methods which give us a overview of the behavior of our process. Sets
of outputs that can be generated within a process are arguably infinite variety, that is why they are
looking for a method to evaluate these processes and the question in a way that takes advantage the
most from these processes.
In order to develop our simulations was carried out a set of programs developed on the platform of
Matlab ©, in which different results were obtained which are shown in this thesis.
4
Temario
Resumen ............................................................................................................................ 2
Abstract ............................................................................................................................. 3
Temario ............................................................................................................................. 4
Índice de Imágenes ............................................................................................................ 6
Objetivos ........................................................................................................................... 9
Justificación ..................................................................................................................... 10
Capítulo 1 ........................................................................................................................ 12
Procedimiento de Muestreo Reconstrucción de realizaciones de procesos gaussianos ....... 12
1.1 Historia del muestreo ......................................................................................... 12
1.2 Característica estadística condicional de los procesos aleatorios ........................ 14
1.2.1 Procesos Aleatorios ............................................................................................ 15
1.2.2 Función de covarianza ............................................................................................. 18
1.2.3 Densidad Espectral De Potencia .............................................................................. 20
1.2.4 Procesos gaussianos y sus propiedades ................................................................... 21
1.3 Procedimiento de muestreo reconstrucción de realización de procesos gaussianos
estacionarios .................................................................................................................... 22
1.3.1 Procesos Markovianos ............................................................................................ 23
1.3.4 PMR de realizaciones del proceso Gaussiano en la salida de un filtro RC de dos
etapas (No Markovianos) ................................................................................................. 27
1.3.5 PMR de realizaciones a la salida de un filtro RC de tres etapas (No Markoviano) ... 30
Conclusión ....................................................................................................................... 33
Capítulo 2 ........................................................................................................................ 34
Cuantificación - Reconstrucción de realizaciones de un proceso gaussiano....................... 34
2.1 Cuantificación ............................................................................................................ 34
Conclusión ....................................................................................................................... 38
Capítulo 3 ........................................................................................................................ 40
5
Procedimiento para el cálculo del error de reconstrucción utilizando Función de densidad
de probabilidad uniforme ................................................................................................. 40
3.1 Análisis PMCR .......................................................................................................... 40
3.2 PMCR de las realizaciones a la salida de un filtro RC de 1 etapa ............................... 42
3.3 PMCR de realizaciones a la salida de un Filtro RC de dos etapas ............................. 44
3.4 PMCR de realizaciones a la salida de un Filtro RC de Tres etapas ............................. 47
3.5 Resultados PMCR con diferentes funciones de covarianza a la salida de un filtro. ...... 49
Conclusión ....................................................................................................................... 52
Capítulo 4 ........................................................................................................................ 53
Procedimiento para el cálculo del muestreo cuantificación y reconstrucción (PMCR) de
procesos gaussianos ......................................................................................................... 53
4.1 Procesos Markovianos ................................................................................................ 53
4.2 Procesos no Markovianos ........................................................................................... 65
4.3 Procesos no Markovianos a la salida de un filtro RC de 3 etapas ............................... 74
Conclusión ..................................................................................................................... 85
Conclusiones Generales ............................................................................................. 87
Trabajos citados ............................................................................................................... 89
Publicaciones ................................................................................................................. 101
6
Índice de Imágenes
Fig. 1 Esperanza matemática condicional .................................................................................................... 15
Fig. 2 Conjunto de Posibles Realizaciones de un Procesos aleatorio dado ..................................................... 16
Fig. 3 Ejemplo de FDP en diferentes tiempos ............................................................................................... 17
........................................................................................................ Fig. 4 Grafica de un proceso suave
.................................................................................................................................................................. 18
Fig. 5 Función de covarianza para un proceso suave ................................................................................... 18
Fig. 6 Grafico de proceso caótico ................................................................................................................. 19
Fig. 7 Función de covarianza para un proceso caótico.................................................................................. 19
Fig. 8 Función básica para un proceso markoviano ...................................................................................... 24
Fig. 9 Función de reconstrucción para un proceso markoviano con ............................................... 25
Fig. 10 Error de reconstrucción para proceso markoviano ............................................................................ 25
Fig. 11 Función básica para un proceso markoviano con .............................................................. 26
Fig. 12 Función de error de reconstrucción de un proceso markoviano con ................................... 27
Fig. 13 Función básica para un proceso no Markoviano ................................................................ 28
Fig. 14 Función de reconstrucción para un proceso no Markoviano .............................................. 28
Fig. 15 Función de error de reconstrucción para un proceso no Markoviano ................................. 29
Fig. 16 Función básica para un proceso no markoviano ................................................................ 29
Fig. 17 Función básica de error de reconstrucción para un proceso no markoviano ....................... 30
Fig. 18 Función básica para filtro RC de tres con ......................................................................... 31
Fig. 19 Función de reconstrucción para filtro RC de tres etapas .................................................... 32
Fig. 20 Función de error de reconstrucción para filtro RC de tres etapas ....................................... 32
Fig. 21 Señal Gaussiana con 5000 muestras ................................................................................................ 35
Fig. 22 Función de covarianza de la señal gaussiana .................................................................................... 35
Fig. 23 Función de distribución de probabilidad de la señal gaussiana ......................................................... 36
Fig. 24 Realización de una sección de las muestras del proceso Gaussiano ................................................... 36
Fig. 25 Diferencia entre las muestras reales y las muestras de la cuantización ............................................ 36
Fig. 26 Procesos Gaussiano a la salida del filtro RC ...................................................................................... 37
Fig. 27 Proceso Gaussiano discretizado a la salida del filtro tomando una sección de 0s a 5s........................ 37
Fig. 28 Proceso Gaussiano a la salida del filtro RC cuantificado .................................................................... 38
Fig. 29 error de reconstrucción + error de cuantificación .......................................................... 41
Para el primer caso aplicando la función de distribución uniforme hallaremos error de reconstrucción de la
cuantificación dado que este valor es uniforme, será igual para todos los niveles. Para Fig. 30
obtenemos = 0.1875, aquí se suma el error de cuantificación obteniendo un nuevo valor de error de
reconstrucción máximo para cada intervalo. .............................................................................................. 42
Fig. 31 Error de reconstruccion mas error de cuantificacion con L=4............................................................ 42
Fig. 32 Error de reconstruccion mas error de cuantificacion con L=8 ............................................................ 42
Fig. 33 Error de reconstruccion mas error de cuantificacion con L=32 .......................................................... 43
Fig. 34 Error de reconstruccion mas error de cuantificacion con L=4 ............................................................ 43
Fig. 35 Error de reconstruccion mas error de cuantificacion con L=128......................................................... 44
Fig. 36 Filtro Rc 2 etapas con L=4 ............................................................................................... 44

7
Fig. 37 Filtro Rc 2 etapas con L=8 ................................................................................................ 45
Fig. 38 Filtro Rc 2 etapas con L=16 .............................................................................................. 45
Fig. 39 Filtro Rc 2 etapas con L=32 .............................................................................................. 46
Fig. 40 Filtro Rc 2 etapas con L=64 .............................................................................................. 46
Fig. 41 Filtro Rc 2 etapas con L=128 ............................................................................................ 46
Fig. 42 Filtro Rc 3 etapas con L=4 ................................................................................................ 47
Fig. 43 Filtro Rc 3 etapas con L=8 ................................................................................................. 47
Fig. 44 Filtro Rc 3 etapas con L=16 .................................................................................................... 48
Fig. 45 Filtro Rc 3 etapas con L=32 ..................................................................................................... 48
Fig. 46 Filtro Rc 3 etapas con L=64 .................................................................................................... 48
Fig. 47 Filtro Rc 3 etapas con L=128 ................................................................................................... 49
Fig. 48 Error de reconstrucción promedio ........................................................................................... 51
Fig. 49 Error de reconstrucción optimo por función .................................................................. 51
Fig. 50 Reconstrucción original vs Reconstrucción Cuantificada ................................................................... 54
Fig. 51 Error promedio de cuantificación .............................................................................................. 54
Fig. 52 Error de reconstrucción sin cuantificar ............................................................................................. 55
Fig. 53 Error de reconstrucción total ....................................................................................................... 56
Fig. 54 Reconstrucción original vs reconstrucción cuantificada .................................................................... 57
Fig. 55 Promedio en tiempo proceso Markoviano con L=8 ........................................................................... 57
Fig. 56 Error de reconstrucción total ....................................................................................................... 58
Fig. 57 Diferencia de reconstrucción para 16 niveles ................................................................................... 58
Fig. 58 Promedio en tiempo con L=16 .......................................................................................................... 59
Fig. 59 Error de reconstrucción total............................................................................................................ 59
Fig. 60 Diferencia de reconstrucción para 32 Niveles RC1 ............................................................................ 60
Fig. 61 Factor promedio de error de reconstrucción para 32 niveles RC1 ...................................................... 60
Fig. 62 Error de reconstrucción 0.1016 ................................................................................................ 61
Fig. 63 Diferencia de reconstrucción para 64 Niveles RC1 ............................................................................ 61
Fig. 64 Factor promedio de error de reconstrucción ..................................................................................... 62
Fig. 65 Error de reconstrucción total 0.1001 ........................................................................................ 62
Fig. 66 Diferencia de reconstrucción para 128 Niveles RC1........................................................................... 63
Fig. 67 Factor promedio de error de reconstrucción para 128 Niveles .......................................................... 64
Fig. 68 Error de reconstrucción total 0.09977 ..................................................................................... 64
Fig. 69 Diferencia de reconstrucción RC2 4 Niveles ..................................................................................... 65
Fig. 70 Factor promedio de error de reconstrucción ..................................................................................... 66
Fig. 71 Error de reconstrucción total 0.1635........................................................................................ 66
Fig. 72 Diferencia de reconstrucción para 8 Niveles RC2 .............................................................................. 67
Fig. 73 Factor promedio de error de reconstrucción ..................................................................................... 67
Fig. 74 Error de reconstrucción total 0.04485 ...................................................................................... 68
Fig. 75 Diferencia de reconstrucción para 16 Niveles RC2 ............................................................................ 68
Fig. 76 Factor promedio de error de reconstrucción ..................................................................................... 69
Fig. 77 Error de reconstrucción total 0.0145 ........................................................................................ 69
Fig. 78 Diferencia de reconstrucción para 32 Niveles RC2 ............................................................................ 70
Fig. 79 Factor promedio de error de reconstrucción .................................................................................... 70

8
Fig. 80 Error de reconstrucción total 0.005494 .................................................................................... 71
Fig. 81 Diferencia de reconstrucción para 64 Niveles RC2 ............................................................................ 71
Fig. 82 Factor promedio del error de reconstrucción .................................................................................... 72
Fig. 83 Error de reconstrucción total 0.00327 ...................................................................................... 72
Fig. 84 Diferencia de reconstrucción para 128 Niveles ................................................................................. 73
Fig. 85 Factor promedio de error de reconstrucción ..................................................................................... 73
Fig. 86 Error de reconstrucción total 0.002886 .................................................................................... 74
Fig. 87 Diferencia de reconstrucción para 4 niveles RC3 ............................................................................... 75
Fig. 88 Factor promedio de error de reconstrucción ..................................................................................... 75
Fig. 89 Error de reconstrucción total 0.1681........................................................................................ 76
Fig. 90 Diferencia de reconstrucción con 8 Niveles RC3 ................................................................................ 77
Fig. 91 Factor promedio de error de reconstrucción ..................................................................................... 77
Fig. 92 Error de reconstrucción total 0.04405 ...................................................................................... 78
Fig. 93 Diferencia de reconstrucción para 16 Niveles RC3............................................................................ 78
Fig. 94 Factor promedio del error de reconstrucción .................................................................................... 79
Fig. 95 Error de reconstrucción total 0.01223 ...................................................................................... 79
Fig. 96 Diferencia de reconstrucción para 32 Niveles RC3 ............................................................................ 80
Fig. 97 Factor de error promedio ................................................................................................................. 80
Fig. 98 Error de reconstrucción total 0.003078 .................................................................................... 81
Fig. 99 Diferencia de reconstrucción para 64 Niveles RC3 ............................................................................ 81
Fig. 100 Factor promedio del error de reconstrucción .................................................................................. 82
Fig. 101 Error de reconstrucción total 0.0007057 ................................................................................ 82
Fig. 102 Diferencia de reconstrucción para 128 Niveles RC3 ......................................................................... 83
Fig. 103 Factor promedio de error de reconstrucción ................................................................................... 83
Fig. 104 Error de reconstrucción total 0.000305 .................................................................................. 84
Fig. 105 Grafico general de resultados de errores de reconstrucción máximo (Entre más cerca del cero se
encuentre mejor será la reconstrucción) ...................................................................................................... 85

9
Objetivos
Evaluar el procedimiento de muestreo-cuantificación-reconstrucción de los procesos gaussianos en
base a la regla de la esperanza matemática condicional.
Los objetivos particulares para nuestro trabajo considerando funciones de covarianza de procesos
Markovianos y no Markovianos para los procesos cuantizados son los siguientes:
Estudio del modelo de procesos Gaussianos Markovianos y no Markovianos
Calculo de las funciones de reconstrucción, error de reconstrucción y error
promedio de reconstrucción de los procesos gaussianos.
Desarrollo del algoritmo computacional para el cálculo de la reconstrucción y error
de reconstrucción.
Desarrollo del algoritmo computacional para el algoritmo del proceso de
cuantificación
Desarrollo de algoritmo de procedimiento de muestreo-cuantificación-
reconstrucción con dos variantes:
Usando el método de la distribución uniforme (se considera un error por cada nivel)
Usando el error de cuantificación de la diferencia de la reconstrucción y la
reconstrucción cuantizada.
Desarrollo del algoritmo computacional para el muestreo cuantificación y
reconstrucción de procesos aleatorios en sus dos variantes.

10
Justificación
En el presente trabajo se abordaran temas en materia de procesamiento de señales, los cuales están
estrechamente ligados a procesos estocásticos, el análisis de estos procesos tiene cierta inexactitud
si intentamos verlo desde el lado del receptor en un sistema de comunicación, el cual evalúa el
desempeño de estas realizaciones. El desarrollo de esta metodología poco estudiada nos dará una
pauta para obtener un conjunto de recomendaciones para el uso y el correcto desempeño de estos
algoritmos, los cuales serán utilizados durante el desarrollo de este trabajo.
recomiendo ampliamente este trabajo para próximas investigaciones en el área de calidad de
reconstrucción de señales, para evaluar un nuevo método el cual comprende de una serie de
funciones estadísticas que evalúen el desempeño de nuestra función de reconstrucción en sistemas
de comunicación de origen estocástico, así mismo esperamos tener un alcance dentro de los
modelos de procesamiento de señales que se desarrollan actualmente, esto con el fin de dar muchas
más posibilidades para el desarrollo de nuevas tecnologías, los resultados aquí mostrados esperan
satisfacer la curiosidad del investigador y llenar un pequeño espacio dentro de nuestro universo de
preguntas.

11
La presente página se dejó intencionalmente en blanco.
12
Capí tulo 1
Procedimiento de Muestreo Reconstrucción de
realizaciones de procesos gaussianos
Una de las características deseables dentro de un sistema de comunicación seria buscar definir el
comportamiento de sus procesos, de tal forma que estos sean completamente descritos, para lo cual
se trabajara en la base de la regla de la esperanza matemática condicional para realizaciones de
procesos gaussianos, las cuales serán alimentados a la entrada de un filtro con ruido blanco. Para
este capítulo obtendremos un error de reconstrucción y una función de error de reconstrucción a
partir de la salida de un filtro lineal aplicando diferentes funciones de covarianza.
1.1 Historia del muestreo
El estudio del procesamiento de las señales durante muchos años ha obtenido grandes avances,
la investigación de la reconstrucción de una señal que pasa a través de determinados puntos,
(muestras) ha sido objeto de estudio y uno de los primeros trabajos de los cuales se tiene registro
fue presentado por J. L. Lagrange en sus lecciones en la Ecole Normale de parís en 1795 [1] el
cual describe que existe un polinomio interpolador que actúa directamente sobre cada
muestra.
∑ (1.1)
Donde, k=0,1, …, n,
(1.2)
Esta interpolación entre muestras de su misma función fue también propuesto por E.T. Whitakker
en su conocido artículo publicado en 1915 [2]. Su desarrollo describe la forma de encontrar los
valores de una función que pasan a través de determinados puntos , donde
, donde , son complejos y . El conjunto de las funciones se le
llamo conjunto cotabular, asociado con la secuencia { } de los valores conocidos. En su
investigación destaca una ecuación es especial la cual llamo función cardinal del conjunto
cotabular, donde es igual a

13
∑
(1.3)
En el año de 1993 el teorema del muestreo fue presentado en la unión soviética en un artículo de
Kotelnikov [3], del cual Shannon (1948) [4] [5] utilizo para demostrar que una señal analógica
limitada en banda es equivalente a la serie de sus muestras, tomadas a una distancia definida
(Teorema de Nyquist). En este artículo se citó de la misma forma el trabajo de Whitaker,
posteriormente se establecieron algunas pruebas al teorema que es hoy conocido como el
teorema de muestreo de Whittaker-Kotelnikov-Shannon (WKS) el cual dice:
Toda función de una señal definida en que esta limitada en banda dentro de un intervalo
(donde > 0) puede ser completamente reconstruida con respecto a toda
partiendo de sus valores muestreados que son tomados en los puntos (donde
) igualmente espaciados sobre el eje real , en términos de
∑ (
)
(1.4)
Este teorema es válido en muchas de sus generalizaciones las cuales son válidas para funciones
determinísticas con espectros limitado [11, 12, 13, 14]. Esta generalización es conocida para
procesos aleatorios [6] estacionarios y que son citados en algunos artículos [15,16] entre ellos el
artículo que presento A.V. Balakrishnan [8] en 1957. El ejemplo más claro del teorema de
muestreo para procesos estocásticos estacionarios con el espectro finito está dado por el
teorema clásico WKS que generaliza A. Balakrishnan [8]. Este teorema es llamado en ocasiones el
teorema de WKS para los procesos estocásticos.
El teorema de Balakrishnan es hasta el día de hoy mencionado en los libros de investigación
como parte fundamental en la teoría de las comunicaciones, por lo tanto es importante
mencionar su teorema el cual esta formulado de la siguiente manera [8]:
Sea un procesos estocástico evaluado real o complejo, estacionario en el
“sentido amplio” y que posee una densidad espectral la cual desaparece fuera del intervalo de la
frecuencia angular [-2πW, 2πW], entonces x(t) tiene la representación :
∑
(1.5)
Para cada , donde simboliza el límite en el sentido cuadrático medio.
Más explícitamente, esto significa
14
{[ ∑ (
)
] } (1.6)
… se asume que todos los procesos tienen sus varianzas y sus promedios finitos.
El teorema comentado anteriormente carece de propiedades estadísticas para la descripción del
procedimiento de Muestreo-Reconstrucción de los procesos estocásticos, lo cual no significa que
sea incorrecta.
A partir de esta información se cuestiona el teorema de Balakrishnan del cual se precisan
limitaciones y los alcances del mismo:
El teorema no utiliza una de las principales características estadísticas del proceso aleatorio, su
FDP o sus funciones características ya sea multidimensional o unidimensional. Además su función
básica, la cual se multiplica con cada muestra de la realización, está determinada por la función
para todos los tipos de procesos aleatorios, así como no depende del número de
muestras, este teorema no contiene alguna característica estadística importante en el tiempo, de
algún proceso estocástico en sus diferentes momentos. Por ejemplo, la ausencia de la función de
covarianza. Con el teorema de Balakrishnan es necesario considerar la realización del proceso
estocástico dado el intervalo infinito del tiempo, de esto se cuestiona el hecho de utilizar el
número infinito de muestras, Para el caso de la función de reconstrucción se cuestiona porque es
igual a cero para todos los procesos estocásticos. Para obtener una reconstrucción óptima
completa de alguna realización en todos los procesos estocásticos con un error de cero utiliza la
frecuencia límite . Finalmente una última observación la cual no incluye el procedimiento de
extrapolación en su formulación.
∑ (1.7)
Donde es la función base para las muestras , en este caso la función base es también
llamada función SINC
(1.8)
1.2 Característica estadística condicional de los procesos aleatorios
Analizaremos las principales propiedades estadísticas de los procesos aleatorios, las cuales son
fundamentales para comprender el desarrollo del Procedimiento de Muestreo-Reconstrucción
(PMR), pero el porqué de este término, ya que en algún momento estas funciones trabajan de una
15
forma dependiente, es imposible hablar de un término solamente como lo es la reconstrucción ya
que esta depende del muestreo y viceversa. Los procesos aleatorios dado un conjunto de
muestras, las cuales pasaran a través de determinados filtros lineales definen los efectos que
tienen a la salida de dichos filtros. Se busca establecer una descripción que sea completa a la
salida del filtro con lo cual, para los procesos aleatorios es conveniente trabajar con la función de
covarianza y con la función de densidad espectral . De esta forma se analizara la
relación Entrada-Salida de un sistema lineal. Para el análisis de reconstrucción trabajaremos muy
fuertemente con filtros pasa-bajas (Filtros RC de una, dos y tres etapas) del cual se hablara en las
siguientes páginas.
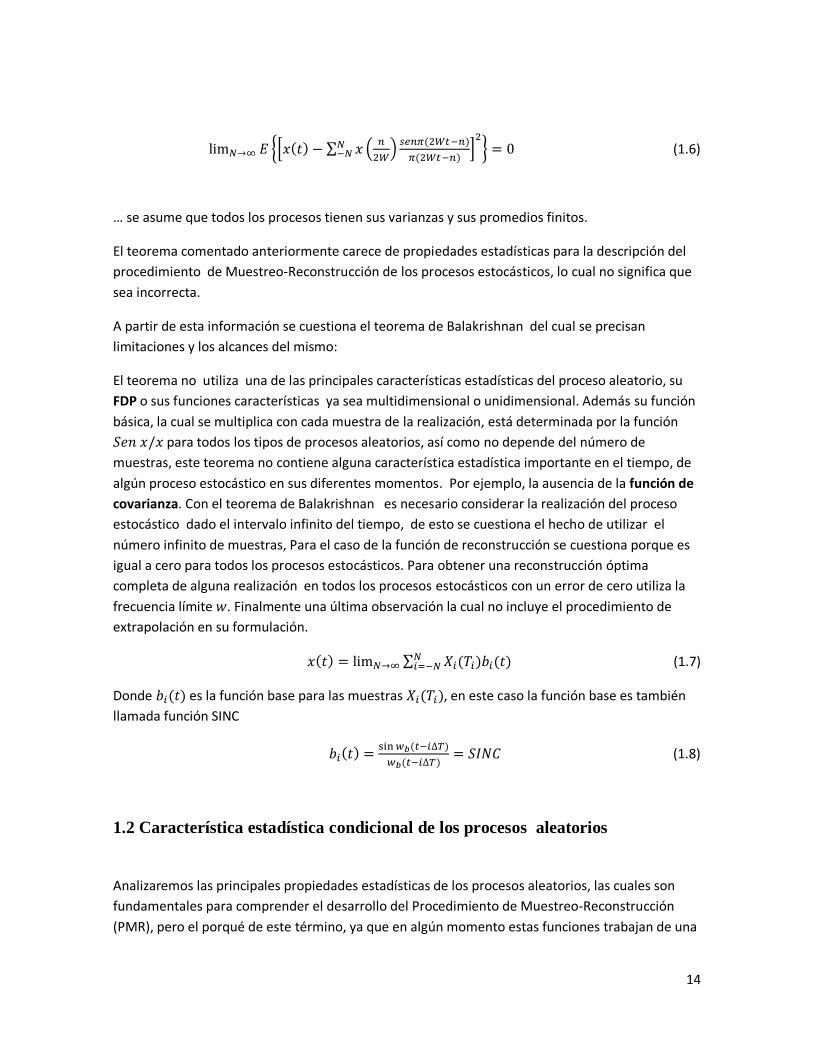
Fig. 1 Esperanza matemática condicional
Se plantearan las principales características que tiene la esperanza matemática condicional, como
un caso general en la reconstrucción de los procesos aleatorios, las muestras definirán las
condiciones para realizar la reconstrucción optima, por ejemplo, la función de covarianza o
función del espectro de potencia del proceso estocástico dado, su número de muestras y el
número actual del intervalo que existe entre cada muestra.
1.2.1 Procesos Aleatorios
Definimos un proceso aleatorio continuo como un conjunto de realizaciones
para los instantes de tiempo , donde es cualquier
entero positivo, cada una de estas realizaciones tiene una función probabilística descrita por sus
propiedades estadísticas que pueden ser expuestas bajo condiciones similares. Cada realización
puede ser definida como una continuidad de valores de sobre un intervalo finito o
dentro de un intervalo de .
|

16
Fig. 2 Conjunto de Posibles Realizaciones de un Procesos aleatorio dado
De la figura 2, las realizaciones están especificadas dentro de los intervalos ( ), ahora si
dividimos a x en un conjunto de L unidades , cada una con anchura y seleccionando un
intervalo ( ), si contamos el número de realizaciones que caen dentro
de ( ), por lo tanto es posible medir la probabilidad asociada en este intervalo:
(1.9)
Se pueden tomar los limites, cuando Y , de tal forma que obtenemos: la
probabilidad de que x en el tiempo cae en el intervalo
(1.10)
Iterando la formula anterior para cada unidad podemos encontrar la densidad de probabilidad
(FDP) deseada en cada intervalo. De esta misma forma podemos hallar la densidad de
probabilidad, esta existe en cada instante de tiempo , dentro de los intervalos de tiempo
( ) del proceso aleatorio y su función de densidad de probabilidad la
estructura de las realizaciones puede ser muy diferente en su diferentes tiempos, es por lo cual

17
muy importante tomar en cuenta los tiempos en la que estas probabilidades son
calculadas. Ya que sus estructura actual de su densidad puede ser diferente para tiempos
diferentes Fig. 3.
Fig. 3 Ejemplo de FDP en diferentes tiempos
Si conocemos su función de densidad de probabilidad en cada uno de sus tiempos ,
podremos obtener información estadística acerca del proceso, así como la función de la esperanza
matemática ⟨ ⟩ en sus instantes de tiempo , la función de la varianza
matemática ⟨ ⟩ y las funciones de sus momentos inicial y central de
orden n Tabla 1:
Función de esperanza matemática
⟨ ⟩ ∫
Función de la varianza:
⟨ ⟩ ∫ ( )
Función del momento inicial de orden n:
⟨ ⟩ ∫
Función del momento central de orden n:
⟨ ⟩ ⟨( ) ⟩ ∫ ( )
Tabla 1

18
1.2.2 Función de covarianza
La función de covarianza la cual describe al proceso como la relación de las diferentes
estructuras del tiempo, tal función es determinística con los dos argumentos del tiempo t1 y t2
que demuestran cómo el momento de covarianza cambia cuando la distancia entre estas dos
secciones cambia también.
⟨ ⟩ ∫ ( )( )
La función de covarianza define si una realización en la estructura de un proceso en el tiempo será
caótica o será suave, se detalla en Fig. 4 y Fig. 6. El proceso suave se observa cuando la función de
covarianza tiende a cero lentamente Fig. 5 , en cambio cuando la función de covarianza tiende a
cero rápidamente se dice que es un proceso caótico Fig. 7.
Fig. 4 Grafica de un proceso suave
Fig. 5 Función de covarianza para un proceso suave 𝝉 𝒕𝟐 𝒕𝟏
R ( = 0)

19
Fig. 6 Grafico de proceso caótico
Fig. 7 Función de covarianza para un proceso caótico
La función de covarianza es solo una función de la diferencia del tiempo cuando el
proceso es estacionario, por lo tanto la función de covarianza sera representada de la
siguiente forma , algunas propiedades que tiene esta funcionde covarianza son
las siguientes:
1) Tiene un valor máximo cuando t1=t2, en donde =t2-t1=0:
⟨ ⟩ ⟨ ⟩
2) Es una función par
0 1 2 3 4 5 6 70
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1

20
3) Tiende a cero cuando
4) Existe una función de covarianza normalizada donde:
5) Su rango de valores está contenido en:
| | , por lo tanto | |
6) Tiene relación con un parámetro llamado tiempo de covarianza en función de
∫ | |
El tiempo de covarianza indica el tiempo en que existe dependencia o influencia entre los
mismos valores del proceso, es muy utilizado para medir las características de la respuesta de un
filtro. Cuando el proceso es caótico se tiene que el valor de del proceso es pequeño comparado
con el tiempo de covarianza de un proceso mas suave.
1.2.3 Densidad Espectral De Potencia
Ahora abordaremos una característica importante, de la cual se toman las propiedades espectrales
de los procesos aleatorios a partir de su distribución de potencia de cada armónico en función de
la frecuencia. Es claro, que esta función espectral debe determinar las propiedades de todas las
realizaciones del proceso aleatorio dado. El teorema de Wiener-Khintchine sugiere que la función
de covarianza o auto correlación para procesos aleatorios esté relacionada con la función de
densidad espectral mediante la transformada de Fourier.
Teorema de Wiener-Khintchine: donde x(t) es un proceso estacionario en sentido amplio.
∫
(1.16)
∫
(1.17)
Siempre que sea lo suficiente mente pequeña para valores grandes de para que

21
∫ | |
(1.18)
Este teorema es válido para procesos no estacionarios siempre que remplacemos por
. Se puede definir que para un proceso suave la densidad espectral de potencia es mas
estrecha y para un proceso caótico la densidad espectral de potencia es más ancha. Y debido a los
atributos espectrales de la función de covarianza su transformada de Fourier tiene
las siguientes propiedades:
1) Siempre es real
2)
3) Es una función simétrica:
1.2.4 Procesos gaussianos y sus propiedades
Un proceso aleatorio Gaussiano aplicado a un filtro lineal estable siempre obtendrá a la salida un
proceso aleatorio Gaussiano. Si consideramos un conjunto de variables aleatorias
dado un proceso aleatorio en cada instante de tiempo ,
además si este proceso es gaussiano, entonces este conjunto de variables aleatorias son conjunta
mente gaussianas para cada y descritas completamente por su matriz de covarianza ( ) de
orden
[ ‖ ‖ ]
{
∑ ∑
[ ( ) ( )]} (1.19)
Donde ( ) es el determinante de la matriz de covarianza
[
] (1.20)
Y ‖ ‖ es la inversa de la matriz de covarianza
‖ ‖ ‖ ‖
, ∑ ( ) (1.21)
(1.22)

22
Si fijamos el conjunto de muestras , entonces la FDP condicional
será Gaussiana también. Y las principales características estadísticas de este proceso condicional
están dadas por las siguientes expresiones, donde el proceso gaussiano condicional es
completamente descrito.
∑ ∑ [ ( )]
(1.23)
∑ ∑ ( )
(1.24)
∑ ∑ ( )
(1.25)
Donde son los elementos de la matriz de covarianza inversa Ecuación 1.26
[
] (1.26)
De las expresiones anteriores (1.23-25) obtenemos el proceso gaussiano condicional
completamente descrito, como podemos observar un proceso condicional es principalmente no
estacionario. La fórmula (1.23) muestra que es una función lineal de las muestras y de (1.24)
podemos observar que la función de error de reconstrucción no depende de lo valores de las
muestras , pero si depende del lugar o la posición en la que se encuentre la muestra.
1.3 Procedimiento de muestreo reconstrucción de realización de procesos
gaussianos estacionarios
Para los siguientes capítulos consideraremos varios ejemplos de los cuales debemos tener en
cuenta dos aspectos a tomar muy importantes, el primero de ellos es demostrar la aplicación de
las formulas generales en alguna realización de proceso concreto, en segundo lugar tenemos
algunas características del procedimiento de muestreo reconstrucción para ir creando una base de
recomendaciones prácticas. Tomaremos ejemplos con procesos de espectro finito e infinito.
Las formulas (1.23) y (1.24) pueden ser simplificadas en el caso estacionario,
, entonces tenemos la expresión para la función de reconstrucción:

23
∑ ∑ ( )
∑ ( )
(1.27)
∑ (1.28)
Donde es la función base, como podemos recordar esta no es la función SINC es muy simple
escribir la función base para procesos no estacionarios ahora observaremos la expresión del error
de reconstrucción.
∑ ∑ ( )
(1.29)
1.3.1 Procesos Markovianos
Como primer ejemplo se tomara el PMR mediante la regla de la esperanza matemática
condicional, consideraremos un proceso aleatorio Gaussiano Markoviano Unidimensional a la
salida de un filtro RC lineal cuando la entrada es alimentada con ruido blanco. La respuesta del
filtro está dada por la función de covarianza normalizada tipo exponencial.
| | (1.30)
Conforme se vallan desarrollando las principales características estadísticas que definen a un proceso en su totalidad trabajaremos con funciones de covarianza igual a la unidad, con el fin de determinar el tiempo de influencia entre los valores de un proceso:
∫ | ∫ | |
(1.31)
Debemos tomar en cuenta que el valor de , para que el tiempo de covarianza de
nuestro proceso sea igual a la unidad debemos considerar el valor de igual a 1, para el caso
Markoviano.
La función de covarianza tiene las propiedades de un proceso Markoviano en la descripción
del Procedimiento de Muestreo-Reconstrucción, entonces concretando las expresiones, para la
función básica, de reconstrucción y la función de error de reconstrucción tenemos:
∑ ∑ | |
(1.32)
∑ ( ) ∑ ∑ | |
(1.33)
∑ ∑ | | | |
(1.34)

24
De las funciones de error obtenidas anteriormente dependerán de la matriz inversa de
covarianza con elementos
‖ ‖ ‖ ( )‖ (1.35)
Si analizamos el comportamiento de reconstrucción en la región de interpolación es decir, cuando
donde i=1…,N. para el cual observaremos la función básica , la función de
reconstrucción y la función de error de reconstrucción . Si se consideran 8 valores de un proceso
aleatorio en los instantes de tiempo tal como se muestra en la tabla 2
VALOR DE LA MUESTRA
INSTANTE DE MUESTREO
.8
Tabla 2
Fig. 8 Función básica para un proceso markoviano
La función básica depende principalmente del comportamiento de la función de covarianza de la
cual existe una función básica por cada muestra Fig. 8.
-0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Funció
n B
ásic
a
Tiempo (t)
Región de
Extrapolación Región de
Extrapolación
Región de Interpolación
25
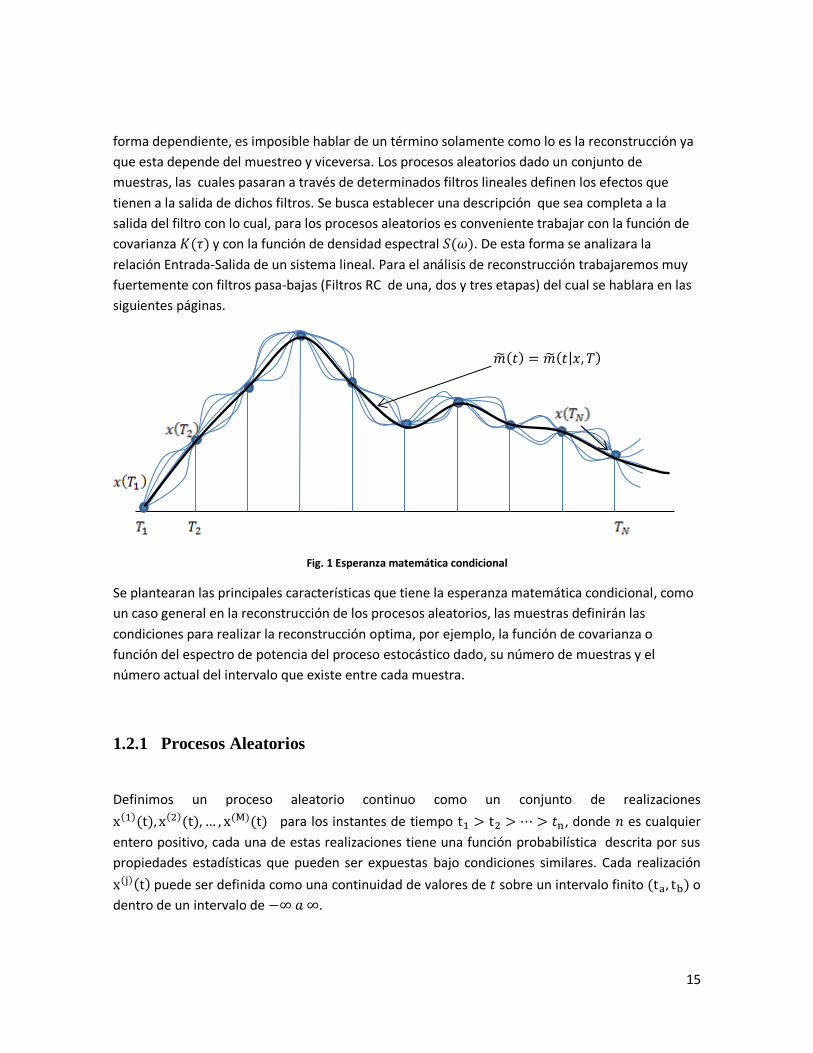
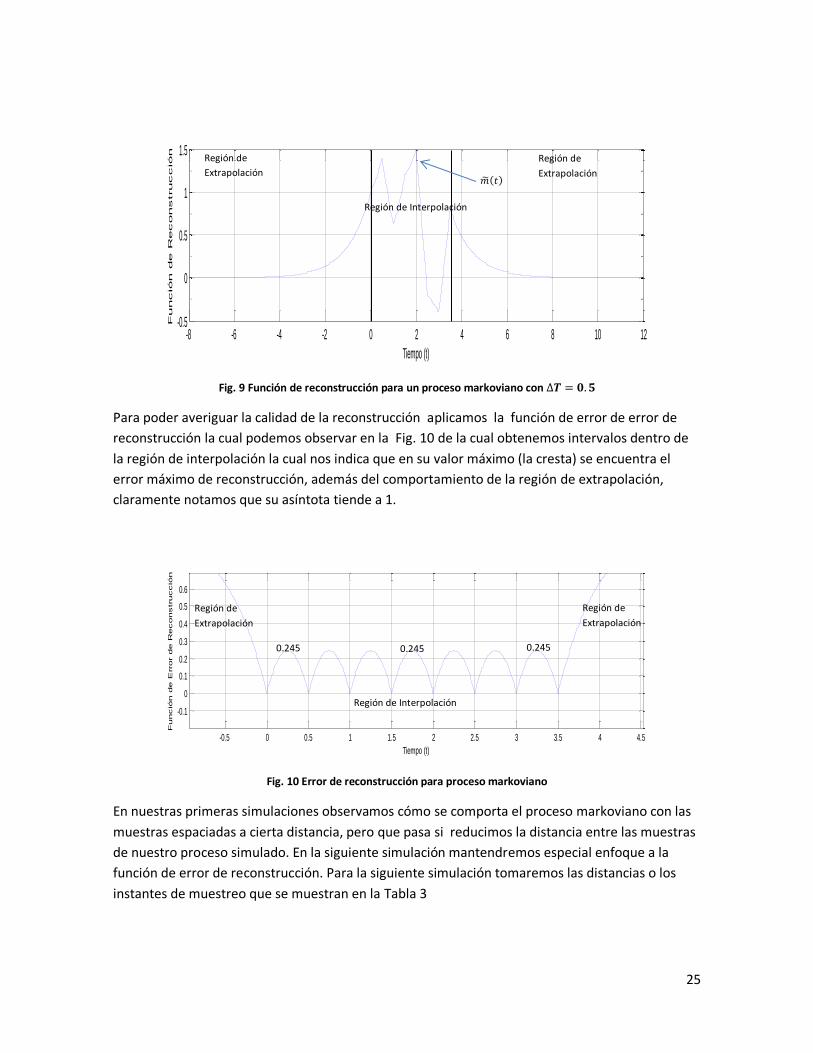
Fig. 9 Función de reconstrucción para un proceso markoviano con
Para poder averiguar la calidad de la reconstrucción aplicamos la función de error de error de
reconstrucción la cual podemos observar en la Fig. 10 de la cual obtenemos intervalos dentro de
la región de interpolación la cual nos indica que en su valor máximo (la cresta) se encuentra el
error máximo de reconstrucción, además del comportamiento de la región de extrapolación,
claramente notamos que su asíntota tiende a 1.
Fig. 10 Error de reconstrucción para proceso markoviano
En nuestras primeras simulaciones observamos cómo se comporta el proceso markoviano con las
muestras espaciadas a cierta distancia, pero que pasa si reducimos la distancia entre las muestras
de nuestro proceso simulado. En la siguiente simulación mantendremos especial enfoque a la
función de error de reconstrucción. Para la siguiente simulación tomaremos las distancias o los
instantes de muestreo que se muestran en la Tabla 3
-8 -6 -4 -2 0 2 4 6 8 10 12-0.5
0
0.5
1
1.5F
unción de R
econstrucción
Tiempo (t)
-0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Funció
n de E
rror de R
econstrucció
n
Tiempo (t)
Región de
Extrapolación
Región de
Extrapolación
Región de Interpolación
Región de Interpolación
Región de
Extrapolación
Región de
Extrapolación
0.245 0.245
0.245
26
VALOR DE LA MUESTRA
INSTANTE DE MUESTREO
.8
Tabla 3
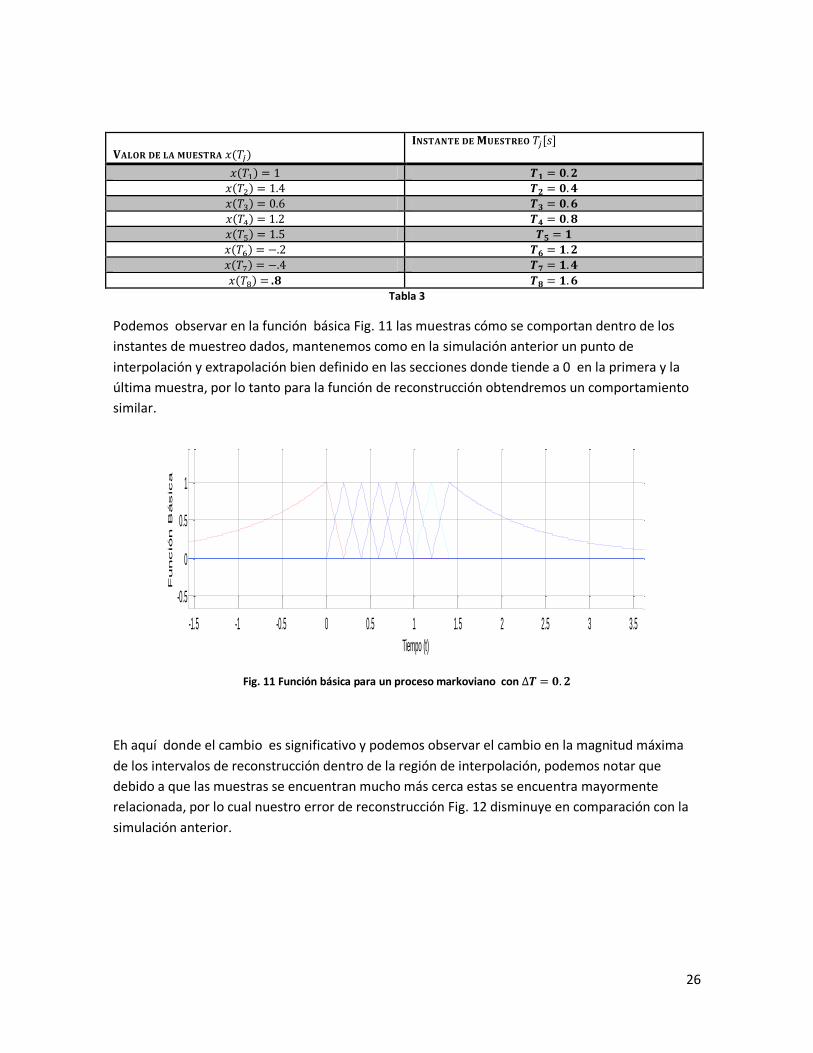
Podemos observar en la función básica Fig. 11 las muestras cómo se comportan dentro de los
instantes de muestreo dados, mantenemos como en la simulación anterior un punto de
interpolación y extrapolación bien definido en las secciones donde tiende a 0 en la primera y la
última muestra, por lo tanto para la función de reconstrucción obtendremos un comportamiento
similar.
Fig. 11 Función básica para un proceso markoviano con
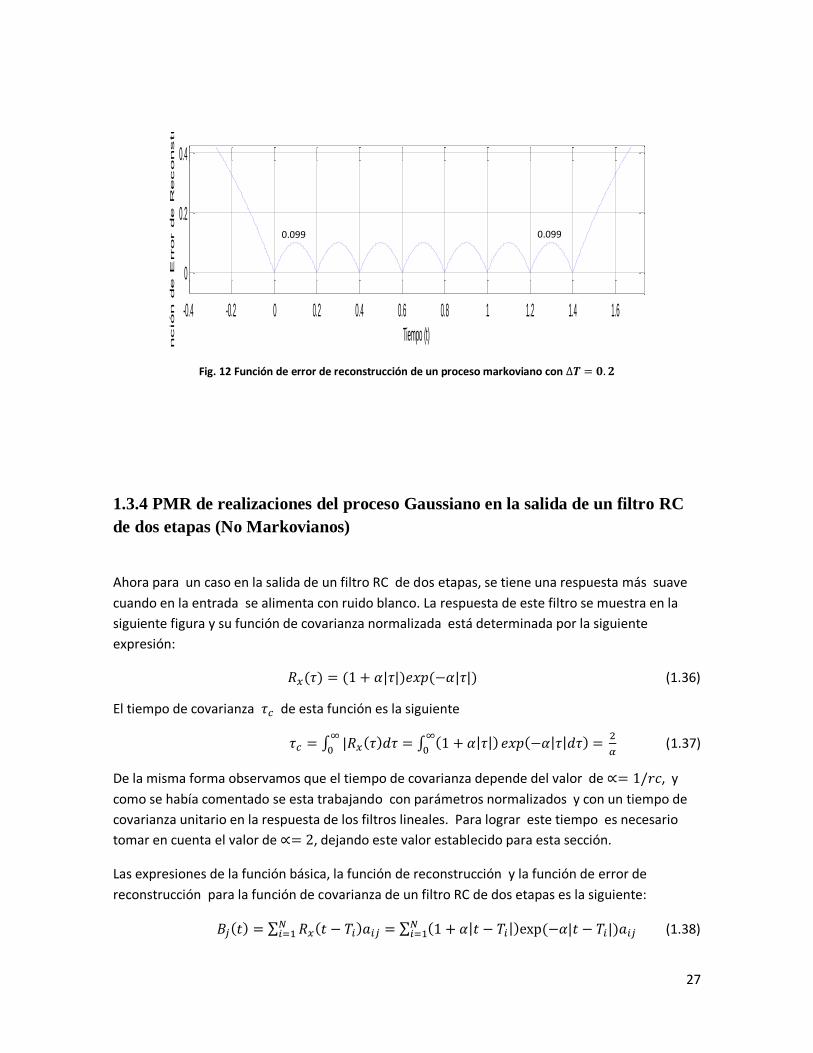
Eh aquí donde el cambio es significativo y podemos observar el cambio en la magnitud máxima
de los intervalos de reconstrucción dentro de la región de interpolación, podemos notar que
debido a que las muestras se encuentran mucho más cerca estas se encuentra mayormente
relacionada, por lo cual nuestro error de reconstrucción Fig. 12 disminuye en comparación con la
simulación anterior.
-1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5
-0.5
0
0.5
1
Función B
ásica
Tiempo (t)
27
Fig. 12 Función de error de reconstrucción de un proceso markoviano con
1.3.4 PMR de realizaciones del proceso Gaussiano en la salida de un filtro RC
de dos etapas (No Markovianos)
Ahora para un caso en la salida de un filtro RC de dos etapas, se tiene una respuesta más suave
cuando en la entrada se alimenta con ruido blanco. La respuesta de este filtro se muestra en la
siguiente figura y su función de covarianza normalizada está determinada por la siguiente
expresión:
| | | | (1.36)
El tiempo de covarianza de esta función es la siguiente
∫ | ∫ | | | |
(1.37)
De la misma forma observamos que el tiempo de covarianza depende del valor de , y
como se había comentado se esta trabajando con parámetros normalizados y con un tiempo de
covarianza unitario en la respuesta de los filtros lineales. Para lograr este tiempo es necesario
tomar en cuenta el valor de , dejando este valor establecido para esta sección.
Las expresiones de la función básica, la función de reconstrucción y la función de error de
reconstrucción para la función de covarianza de un filtro RC de dos etapas es la siguiente:
∑ ∑ | | | |
(1.38)
-0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
0
0.2
0.4F
unción de E
rror de R
econstrucción
Tiempo (t)
0.099 0.099
28
∑ ( ) ∑ ∑ | | | | | |
(1.40)
∑ ∑ | | | | | | | |
(1.41)
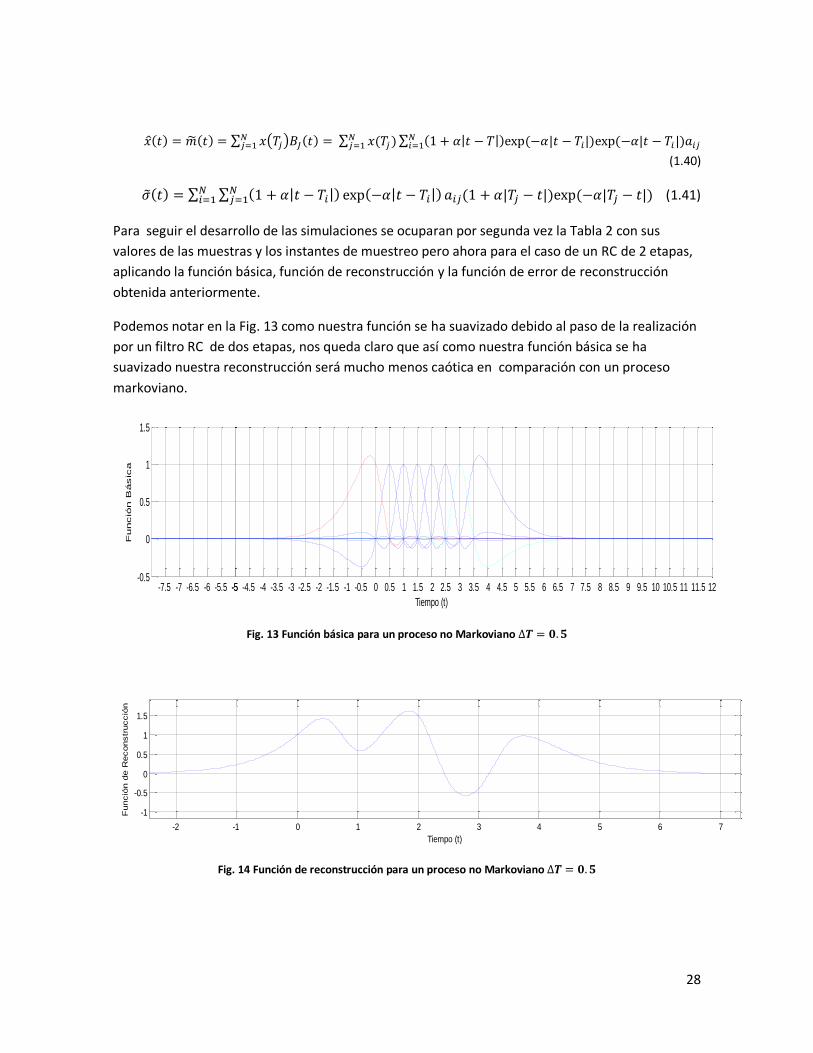
Para seguir el desarrollo de las simulaciones se ocuparan por segunda vez la Tabla 2 con sus
valores de las muestras y los instantes de muestreo pero ahora para el caso de un RC de 2 etapas,
aplicando la función básica, función de reconstrucción y la función de error de reconstrucción
obtenida anteriormente.
Podemos notar en la Fig. 13 como nuestra función se ha suavizado debido al paso de la realización
por un filtro RC de dos etapas, nos queda claro que así como nuestra función básica se ha
suavizado nuestra reconstrucción será mucho menos caótica en comparación con un proceso
markoviano.
Fig. 13 Función básica para un proceso no Markoviano
Fig. 14 Función de reconstrucción para un proceso no Markoviano
-5-7.5 -7 -6.5 -6 -5.5 -5 -4.5 -4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10 10.5 11 11.5 12-0.5
0
0.5
1
1.5
Funció
n B
ásic
a
Tiempo (t)
-2 -1 0 1 2 3 4 5 6 7
-1
-0.5
0
0.5
1
1.5
Funció
n d
e R
econstr
ucció
n
Tiempo (t)

29
Fig. 15 Función de error de reconstrucción para un proceso no Markoviano
De la Fig. 15 podemos notar la disminución del error máximo de reconstrucción en nuestro
modelo de función de covarianza con el cual mejoramos la calidad de la reconstrucción.
Volvemos a aplicar la misma simulación con un decremento en el instante de muestreo para esta
nueva función de covarianza y veremos qué pasa.
Fig. 16 Función básica para un proceso no markoviano
Podemos observar el mismo comportamiento en esta función en general, pero una disminución
en el error máximo de reconstrucción es notable, el cual nos indica una mejor reconstrucción en la
calidad de esta señal.
0 0.5 1 1.5 2 2.5 3 3.5-0.1
-0.05
0
0.05
0.1
0.15
Funció
n de E
rror de R
econstrucció
n
Tiempo (t)
-8 -6 -4 -2 0 2 4 6 8 10 12-1.5
-1
-0.5
0
0.5
1
1.5
2
Funció
n B
ásic
a
Tiempo (t)
0.0421
11
0.0421
11

30
Fig. 17 Función básica de error de reconstrucción para un proceso no markoviano
1.3.5 PMR de realizaciones a la salida de un filtro RC de tres etapas (No
Markoviano)
Ahora podemos agregar una etapa más al filtro RC anterior para poder observar los cambios que
sufre nuestra realización, es claro que con un filtro RC de tres etapas nuestra realización se
volverá mucho más suave con lo cual nuestro error de reconstrucción será muy ligero, tomaremos
la siguiente función de covarianza:
( | |
) | | (1.42)
Para esta función de covarianza tenemos un tiempo de covarianza mayor a los dos filtros
anteriores.
∫ | | ∫ | | |
| | |
(1.43)
Y por lo tanto para esta sección tomaremos a , y las expresiones de la función básica,
función de reconstrucción asi como la de el error de reconstrucción se mencionan a continuación
para poder definir nuestro siguiente conjunto de resultados:
∑ | |
| | (1.44)
∑ ∑ | |
| | (1.44)
-0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
-0.02
0
0.02
0.04
0.06
Funció
n de E
rror de R
econstrucció
n
Tiempo (t)
0.00332 0.00332
31
∑ ∑ ( | |
) | | | |
| | (1.45)
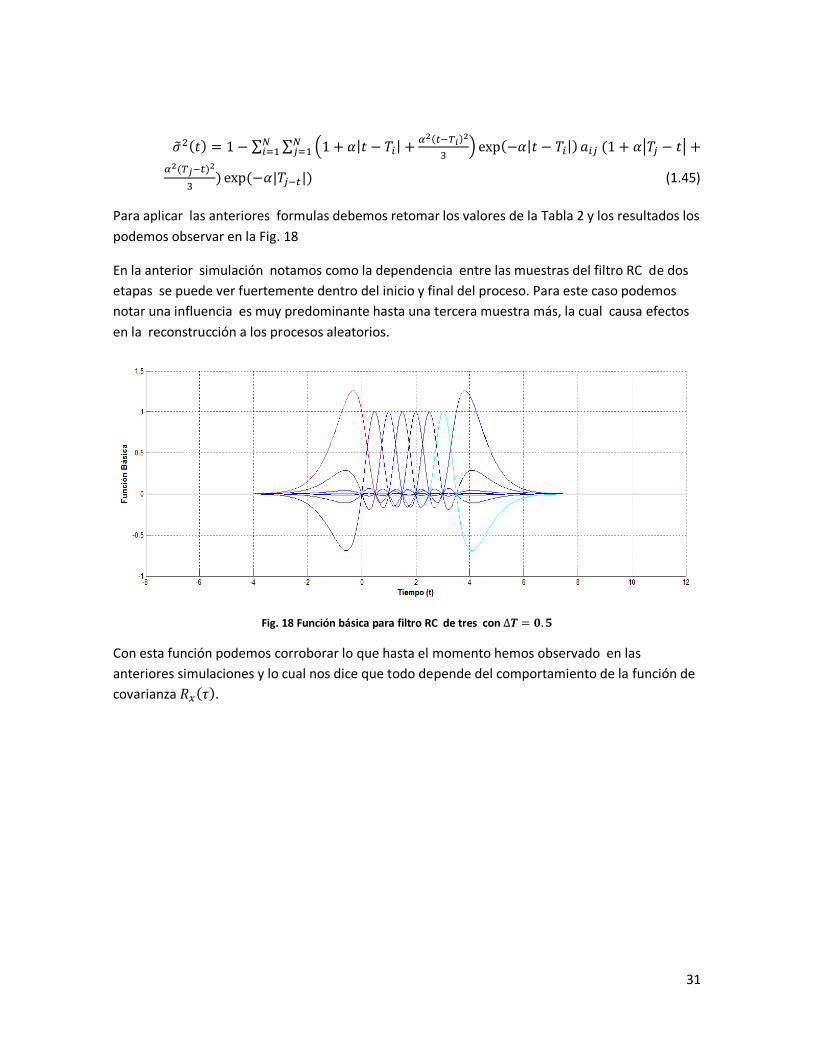
Para aplicar las anteriores formulas debemos retomar los valores de la Tabla 2 y los resultados los
podemos observar en la Fig. 18
En la anterior simulación notamos como la dependencia entre las muestras del filtro RC de dos
etapas se puede ver fuertemente dentro del inicio y final del proceso. Para este caso podemos
notar una influencia es muy predominante hasta una tercera muestra más, la cual causa efectos
en la reconstrucción a los procesos aleatorios.
Fig. 18 Función básica para filtro RC de tres con
Con esta función podemos corroborar lo que hasta el momento hemos observado en las
anteriores simulaciones y lo cual nos dice que todo depende del comportamiento de la función de
covarianza .

32
Fig. 19 Función de reconstrucción para filtro RC de tres etapas
Podemos entonces concluir que entre más suave sea el proceso dentro de un filtro lineal, más
fuerte será la influencia entre cada muestra, como consecuencia tendremos un incremento en el
número de muestras y la resolución de la definición de la reconstrucción de la señal será cercana
a su forma original.
Fig. 20 Función de error de reconstrucción para filtro RC de tres etapas
Como ya habíamos mencionado anteriormente en Fig. 20 el error de reconstrucción podemos
notar como, en donde el error se vuelve cero es donde nuestra función coincide con el intervalo
de muestreo , pues ya conocemos el valor que debe tener el proceso en esos puntos
exactamente, su máximo error que puede tener cada muestra se encuentra en la parte más alta
del intervalo. Si notamos más a detalle esta figura podemos observar como en los extremos el
0 0.5 1 1.5 2 2.5 3 3.5
0
0.005
0.01
0.015
0.02
0.025
0.03
0.01431
Fu
nc
ión
d
e E
rro
r d
e R
ec
on
stru
cc
ión
T iempo (t)
0.0143

33
error es mucho más grande que en sus muestras aledañas, esto es debido a que la influencia que
se ejerce sobre sus muestras aledañas disminuyen o aumentan el error según su distancia entre
cada una de ellas.
Podremos estar seguros de que las muestras a la salida de un filtro RC de tres etapas con un
tendrá una mejor reconstrucción debido a la influencia tan cercana entre las muestras
que tendríamos.
Conclusión
Es importante aclarar que el error de reconstrucción no depende del conjunto de valores de
nuestras muestras, dentro de dichas muestras existe una tendencia la cual dice que, mientras cada
muestra se mantiene alejada mayor será nuestro error de reconstrucción.
34
Capí tulo 2
Cuantificación - Reconstrucción de realizaciones
de un proceso gaussiano
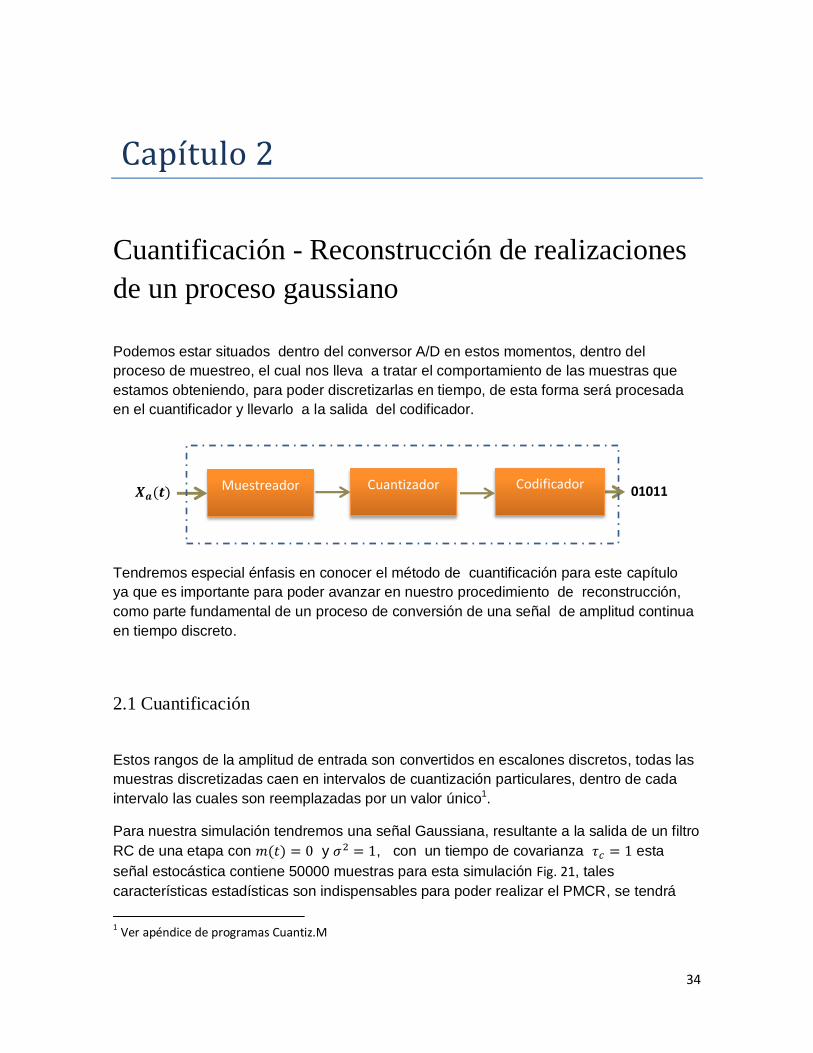
Podemos estar situados dentro del conversor A/D en estos momentos, dentro del
proceso de muestreo, el cual nos lleva a tratar el comportamiento de las muestras que
estamos obteniendo, para poder discretizarlas en tiempo, de esta forma será procesada
en el cuantificador y llevarlo a la salida del codificador.
Tendremos especial énfasis en conocer el método de cuantificación para este capítulo
ya que es importante para poder avanzar en nuestro procedimiento de reconstrucción,
como parte fundamental de un proceso de conversión de una señal de amplitud continua
en tiempo discreto.
2.1 Cuantificación
Estos rangos de la amplitud de entrada son convertidos en escalones discretos, todas las
muestras discretizadas caen en intervalos de cuantización particulares, dentro de cada
intervalo las cuales son reemplazadas por un valor único1.
Para nuestra simulación tendremos una señal Gaussiana, resultante a la salida de un filtro
RC de una etapa con y , con un tiempo de covarianza esta
señal estocástica contiene 50000 muestras para esta simulación Fig. 21, tales
características estadísticas son indispensables para poder realizar el PMCR, se tendrá
1 Ver apéndice de programas Cuantiz.M
Muestreador Cuantizador Codificador 01011
35
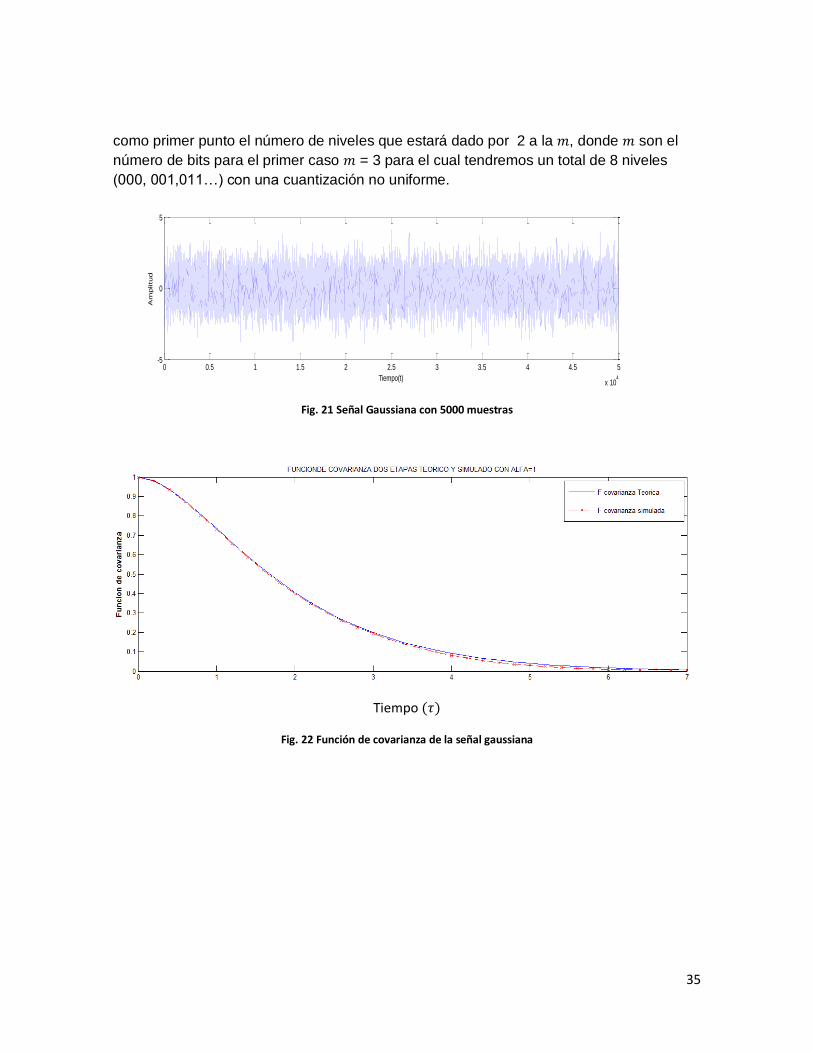
como primer punto el número de niveles que estará dado por 2 a la , donde son el
número de bits para el primer caso = 3 para el cual tendremos un total de 8 niveles
(000, 001,011…) con una cuantización no uniforme.
Fig. 21 Señal Gaussiana con 5000 muestras
Tiempo
Fig. 22 Función de covarianza de la señal gaussiana
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 104
-5
0
5
Tiempo(t)
Am
plitu
d

36
Tiempo
Fig. 23 Función de distribución de probabilidad de la señal gaussiana
Para este analisis solo se tomara una pequeña seccion del proceso x(t) Fig. 21, ademas
que es muy caotica y dificil de observar con mas precision se analizara en Fig. 24.
Fig. 24 Realización de una sección de las muestras del proceso Gaussiano
Fig. 25 Diferencia entre las muestras reales y las muestras de la cuantización
-5 -4 -3 -2 -1 0 1 2 3 4 50
0.01
0.02
0.03
0.04
0.05
0.06FDP calculada del proceso x(t)
Tiempo
FD
P
0 50 100 150 200 250 300 350-3
-2
-1
0
1
2
3
20 40 60 80 100 120 140
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
X: 43.99
Y: -1
X: 68.77
Y: 2.5
X: 72.9
Y: 0
X: 18.03
Y: 0
X: 33.96
Y: 2
X: 42.22
Y: 0.5
X: 99.45
Y: 1
X: 112.4
Y: -1
X: 134.3
Y: 0.5
X: 137.2
Y: -1.5
X: 127.8
Y: 2

37
Fig. 26 Procesos Gaussiano a la salida del filtro RC
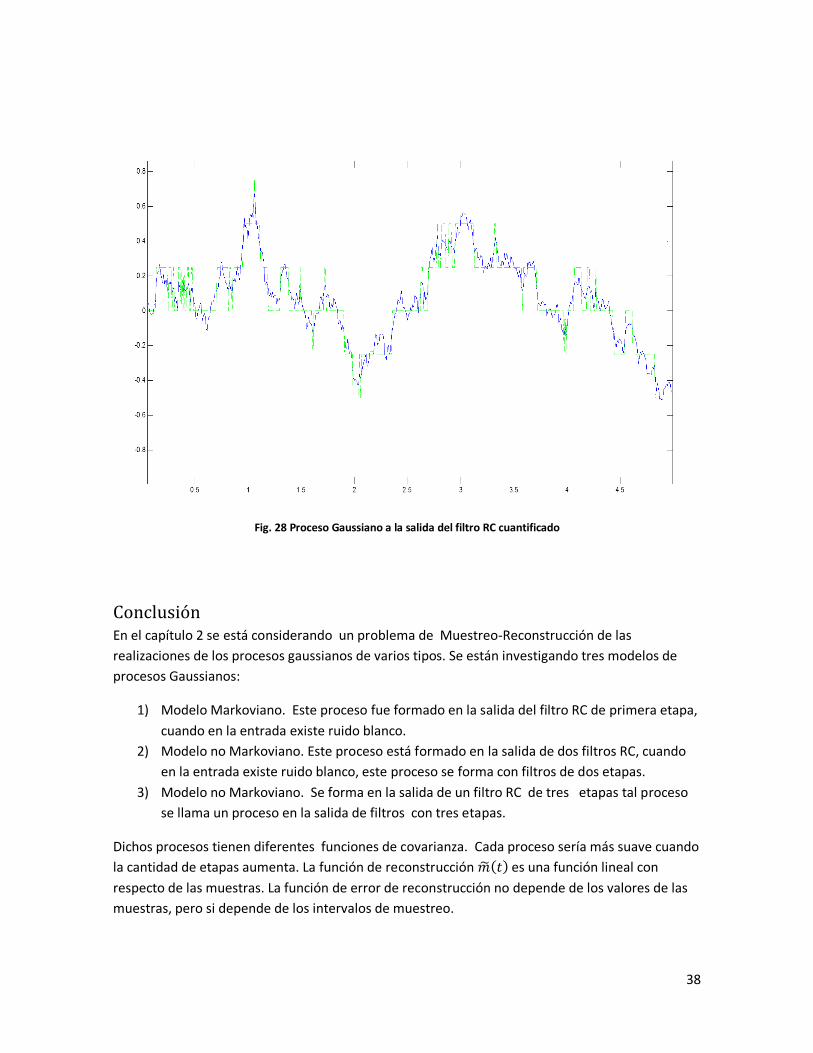
Para observar a detalle lo que ocurre en la realización que obtuvimos ampliaremos la
vista y tomaremos una sección de la muestra de 0s a 5s, como se muestra en la figura
siguiente, con la cual se pretende observar el comportamiento de la discretizacion en
forma escalonada Fig. 28.
Fig. 27 Proceso Gaussiano discretizado a la salida del filtro tomando una sección de 0s a 5s
0 10 20 30 40 50 60 70 80 90 100-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0.5 1 1.5 2 2.5 3 3.5 4 4.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Tiempo (t)
38
Fig. 28 Proceso Gaussiano a la salida del filtro RC cuantificado
Conclusión En el capítulo 2 se está considerando un problema de Muestreo-Reconstrucción de las
realizaciones de los procesos gaussianos de varios tipos. Se están investigando tres modelos de
procesos Gaussianos:
1) Modelo Markoviano. Este proceso fue formado en la salida del filtro RC de primera etapa,
cuando en la entrada existe ruido blanco.
2) Modelo no Markoviano. Este proceso está formado en la salida de dos filtros RC, cuando
en la entrada existe ruido blanco, este proceso se forma con filtros de dos etapas.
3) Modelo no Markoviano. Se forma en la salida de un filtro RC de tres etapas tal proceso
se llama un proceso en la salida de filtros con tres etapas.
Dichos procesos tienen diferentes funciones de covarianza. Cada proceso sería más suave cuando
la cantidad de etapas aumenta. La función de reconstrucción es una función lineal con
respecto de las muestras. La función de error de reconstrucción no depende de los valores de las
muestras, pero si depende de los intervalos de muestreo.

39
Para hacer la comparación correcta de los algoritmos se eligieron los parámetros iguales para
todos los procesos aleatorios con media igual a cero, =1 y . Para obtener un tiempo de
covarianza igual a 1 se necesita elegir el parámetro alfa de manera diferente para cada tipo
de proceso.
El resultado de nuestros cálculos muestra que el error de la reconstrucción sería menor cuando el
proceso es más suave. Además cuando el intervalo dentro de los muestreos es más grande, el
máximo de error de reconstrucción es más grande también.

40
Capí tulo 3
Procedimiento para el cálculo del error de
reconstrucción utilizando Función de densidad de
probabilidad uniforme
Se desarrolla un procedimiento para evaluar nuestra función de reconstrucción el cual
El error de cuantificación se ha estudiado en muy pocas investigaciones de las cuales no
se había tomado en cuenta la esperanza matemática, para efectos de reconstrucción es
el valor significativo el cual define una mejora en la reconstrucción de la señal.
3.1 Análisis PMCR
Para este capítulo analizaremos el cálculo del error de reconstrucción total, el cual se simula
mediante las muestras a intervalos no periódicos de 0.1, 0.3, 0.6 y 1.0, partiendo del primero
hasta el cuarto intervalo y aplicando el procedimiento de muestreo cuantificación y reconstrucción
para diferentes funciones de covarianza de un proceso Gaussiano. Aplicando la función de error de
reconstrucción (Ecuación 1.29) y sumando a dicho error el error de cuantificación en magnitud
podemos obtener un error máximo de reconstrucción.
(3.1)
(3.2)
Para el primer caso se tomó un rango de cuantificación con una FDP Gaussiana y
con N= 4 niveles de cuantificación.
Aplicando tenemos que para
41
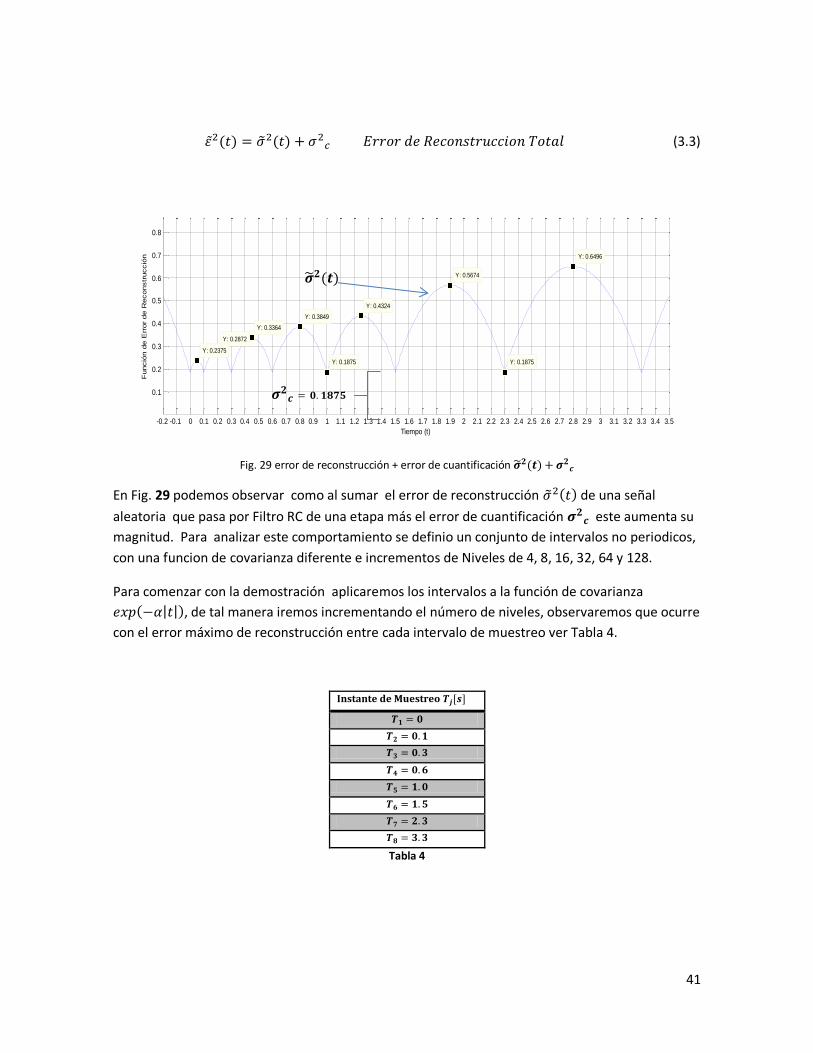
(3.3)
Fig. 29 error de reconstrucción + error de cuantificación
En Fig. 29 podemos observar como al sumar el error de reconstrucción de una señal
aleatoria que pasa por Filtro RC de una etapa más el error de cuantificación este aumenta su
magnitud. Para analizar este comportamiento se definio un conjunto de intervalos no periodicos,
con una funcion de covarianza diferente e incrementos de Niveles de 4, 8, 16, 32, 64 y 128.
Para comenzar con la demostración aplicaremos los intervalos a la función de covarianza
| | , de tal manera iremos incrementando el número de niveles, observaremos que ocurre
con el error máximo de reconstrucción entre cada intervalo de muestreo ver Tabla 4.
Instante de Muestreo
Tabla 4
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 3.4 3.5
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Y: 0.6496
Funció
n d
e E
rror
de R
econstr
ucció
n
Tiempo (t)
Y: 0.5674
Y: 0.4324
Y: 0.3849
Y: 0.3364
Y: 0.2872
Y: 0.2375
Y: 0.1875 Y: 0.1875

42
3.2 PMCR de las realizaciones a la salida de un filtro RC de 1 etapa
Para el primer caso aplicando la función de distribución uniforme hallaremos error de
reconstrucción de la cuantificación dado que este valor es uniforme, será igual para todos los
niveles. Para Fig. 30 obtenemos = 0.1875, aquí se suma el error de cuantificación
obteniendo un nuevo valor de error de reconstrucción máximo para cada intervalo.
Fig. 31 Error de reconstruccion mas error de cuantificacion con L=4
Para continuar con el análisis aplicaremos el algoritmo de error de cuantificación con 8 Niveles,
para este caso el error de cuantificación disminuye al aumentar el número de niveles en
comparación con el de 4 niveles. Por lo tanto el error de reconstrucción disminuye.
Fig. 32 Error de reconstruccion mas error de cuantificacion con L=8
Hasta ahorita hemos visto como la varianza disminuye con el incremento de sus niveles, ahora
observaremos que pasa con 32 niveles, recordemos que estamos trabajando con funciones de
covarianza de 1ra etapa por lo tanto el error en cada intervalo es más grande a pesar de tener un
intervalo de muestreo pequeño.
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 3.4 3.5
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Y: 0.6496
Funció
n d
e E
rror
de R
econstr
ucció
n
Tiempo (t)
Y: 0.5674
Y: 0.4324
Y: 0.3849
Y: 0.3364
Y: 0.2872
Y: 0.2375
Y: 0.1875 Y: 0.1875 Y: 0.1875Y: 0.1875
-0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 3.4 3.5 3.60
0.1
0.2
0.3
0.4
0.5
Y: 0.5088
Funció
n d
e E
rror
de R
econstr
ucció
n
Y: 0.4266
Y: 0.2914
Y: 0.2438
Y: 0.1958
Tiempo (t)
Y: 0.1465
Y: 0.09683
Y: 0.04688 Y: 0.04688 Y: 0.04688

43
Fig. 33 Error de reconstruccion mas error de cuantificacion con L=32
Se obtiene un mejor resultado con en comparación con los niveles anteriores tenemos
= 0.0029 una disminución de la varianza la cual se observa a grandes rasgos y por lo tanto la
disminución del error de reconstrucción es notable. Para los siguientes niveles de 64 y 128
obtuvimos un mucho mejor disminución del error de reconstrucción, para un mejor análisis se
tabularon los resultados al final de este capítulo así como se graficaron los errores óptimos para
esta función.
Fig. 34 Error de reconstruccion mas error de cuantificacion con L=4
Ya que hemos observado la disminución en nuestra varianza y por lo tanto el error de
reconstrucción también se hace notar en nuestro error de reconstrucción total.
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 3.4 3.5
0
0.1
0.2
0.3
0.4
0.5
Y: 0.05289
Funció
n d
e E
rror
de R
econstr
ucció
n
Tiempo (t)
Y: 0.1512
Y: 0.1998
Y: 0.2478
Y: 0.3829
Y: 0.4644
Y: 0.1026
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3
0
0.1
0.2
0.3
0.4
0.5
Y: 0.05069
Funció
n d
e E
rror
de R
econstr
ucció
n
Tiempo (t)
Y: 0.1004
Y: 0.1496
Y: 0.1981
Y: 0.2457
Y: 0.3807 Y: 0.4628

44
Fig. 35 Error de reconstruccion mas error de cuantificacion con L=128
3.3 PMCR de realizaciones a la salida de un Filtro RC de dos etapas Para el caso de los filtros RC de dos etapas con su función de covarianza: | | | | (3.4)
Podemos notar mucho menos pronunciado cada intervalo del error máximo, una disminución
considerable del error en comparación de un proceso Markoviano.
Fig. 36 Filtro Rc 2 etapas con L=4
Conforme incrementamos los niveles obtenemos una disminución en el error total de
reconstrucción para esta función de covarianza.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 3.4 3.50
0.1
0.2
0.3
0.4
0.5
Y: 0.05014
Funció
n d
e E
rror
de R
econstr
ucció
n
Tiempo (t)
Y: 0.09886
Y: 0.1491
Y: 0.1976
Y: 0.2451
Y: 0.3799 Y: 0.4623
-0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 3.4 3.5
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4Y: 0.4094
Funció
n d
e E
rror
de R
econstr
ucció
n
Tiempo (t)
Y: 0.3152
Y: 0.2267Y: 0.2078
Y: 0.1963Y: 0.1901Y: 0.188
45
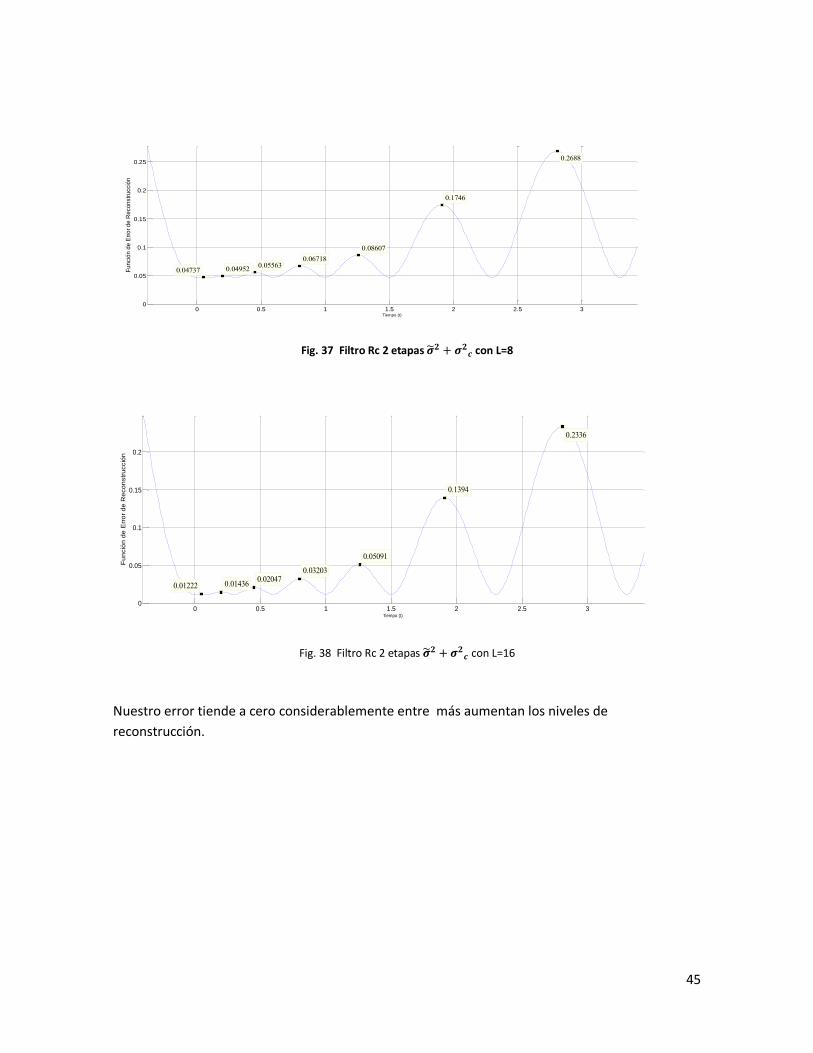
Fig. 37 Filtro Rc 2 etapas con L=8
Fig. 38 Filtro Rc 2 etapas con L=16
Nuestro error tiende a cero considerablemente entre más aumentan los niveles de
reconstrucción.
0 0.5 1 1.5 2 2.5 30
0.05
0.1
0.15
0.2
0.250.2688
Fu
nció
n d
e E
rro
r d
e R
eco
nstr
ucció
n
Tiempo (t)
0.1746
0.08607
0.067180.05563
0.049520.04737
0 0.5 1 1.5 2 2.5 30
0.05
0.1
0.15
0.2
0.01436
Fu
nció
n d
e E
rro
r d
e R
eco
nstr
ucció
n
Tiempo (t)
0.020470.03203
0.05091
0.1394
0.2336
0.01222
46
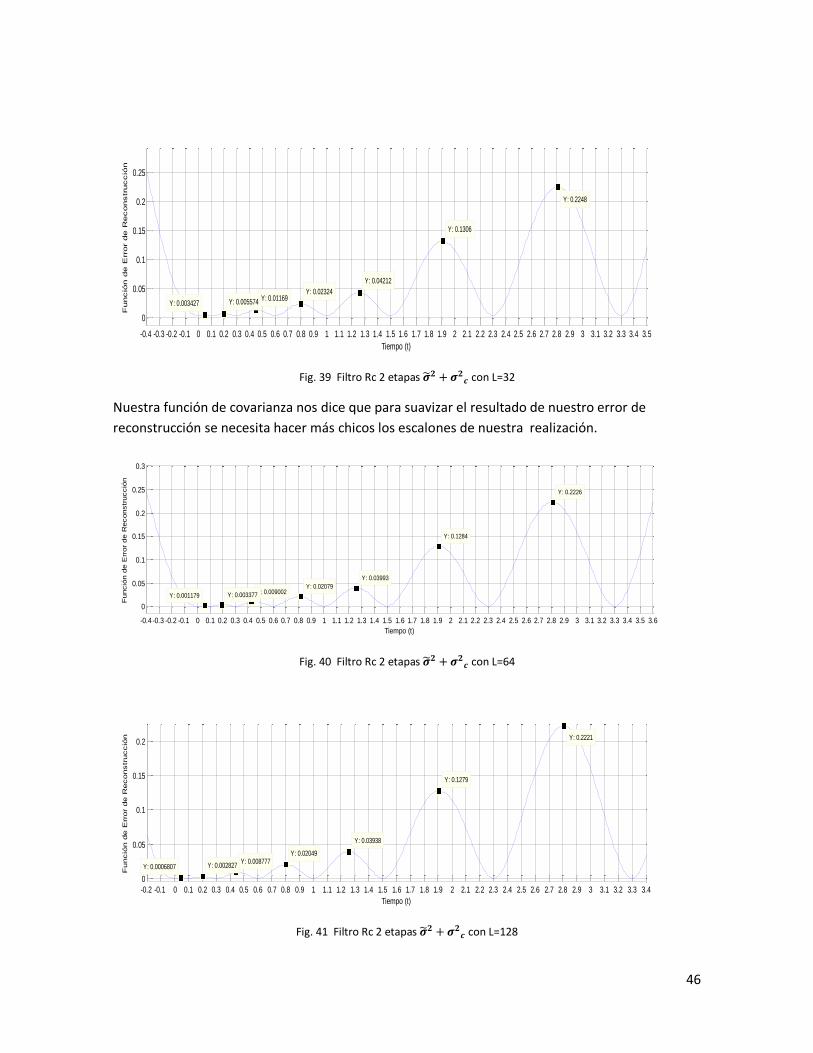
Fig. 39 Filtro Rc 2 etapas con L=32
Nuestra función de covarianza nos dice que para suavizar el resultado de nuestro error de
reconstrucción se necesita hacer más chicos los escalones de nuestra realización.
Fig. 40 Filtro Rc 2 etapas con L=64
Fig. 41 Filtro Rc 2 etapas con L=128
-0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 3.4 3.5
0
0.05
0.1
0.15
0.2
0.25
Y: 0.2248
Funció
n d
e E
rror
de R
econstr
ucció
n
Tiempo (t)
Y: 0.1306
Y: 0.04212
Y: 0.02324Y: 0.01169Y: 0.005574Y: 0.003427
-0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 3.4 3.5 3.6
0
0.05
0.1
0.15
0.2
0.25
0.3
Y: 0.2226
Funció
n d
e E
rror
de R
econstr
ucció
n
Tiempo (t)
Y: 0.1284
Y: 0.03993
Y: 0.02079Y: 0.009002Y: 0.003377Y: 0.001179
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 3.4
0
0.05
0.1
0.15
0.2Y: 0.2221
Funció
n d
e E
rror
de R
econstr
ucció
n
Tiempo (t)
Y: 0.1279
Y: 0.03938
Y: 0.02049Y: 0.008777
Y: 0.002827Y: 0.0006807

47
3.4 PMCR de realizaciones a la salida de un Filtro RC de Tres etapas
Para la función de covarianza para un filtro RC de tres etapas tenemos la expresión de la formula
( | |
) | | la cual hace mas suave y además disminuye el error de
reconstrucción mientras los escalones sean más y más chicos.
Podemos observar en las siguientes simulaciones la disminución del error de reconstrucción para
los niveles de 4,8,16,32,64 y 128 .
Fig. 42 Filtro Rc 3 etapas con L=4
Fig. 43 Filtro Rc 3 etapas con L=8
-0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 3.40
0.05
0.1
0.15
0.2
0.25
0.3
Y: 0.1877
Funció
n d
e E
rror
de R
econstr
ucció
n
Tiempo (t)
Y: 0.1875 Y: 0.1884 Y: 0.1912 Y: 0.1986
Y: 0.2497
Y: 0.3333
-0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 3.4 3.50
0.05
0.1
0.15
0.2
Y: 0.1927
Funció
n d
e E
rror
de R
econstr
ucció
n
Tiempo (t)
Y: 0.109
Y: 0.05795Y: 0.05057Y: 0.04782Y: 0.04703Y: 0.0469

48
Fig. 44 Filtro Rc 3 etapas con L=16
Fig. 45 Filtro Rc 3 etapas con L=32
Fig. 46 Filtro Rc 3 etapas con L=64
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 3.4 3.5
0
0.05
0.1
0.15
0.2
Y: 0.1575
Funció
n d
e E
rror
de R
econstr
ucció
n
Tiempo (t)
Y: 0.07388
Y: 0.02279Y: 0.01538Y: 0.01266Y: 0.01188Y: 0.01174
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 3.4 3.5
0
0.05
0.1
0.15
Y: 0.002952
Funció
n d
e E
rror
de R
econstr
ucció
n
Tiempo (t)
Y: 0.003872 Y: 0.006626Y: 0.014
Y: 0.06509
Y: 0.003087
Y: 0.1484
-0.4-0.3-0.2-0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 3.4 3.5 3.6 3.7 3.8 3.9
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
Y: 0.0007548
Funció
n d
e E
rror
de R
econstr
ucció
n
Tiempo (t)
Y: 0.001675 Y: 0.004429Y: 0.01172
Y: 0.06289
Y: 0.1465

49
Fig. 47 Filtro Rc 3 etapas con L=128
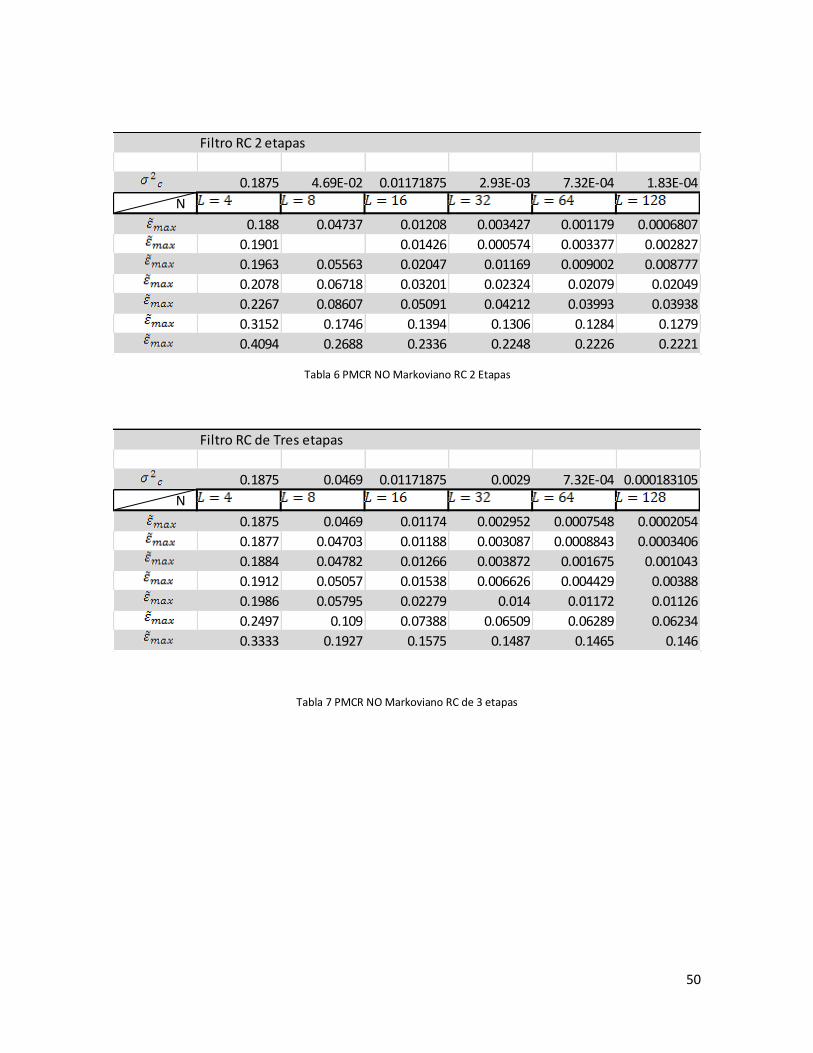
Podemos reunir los datos en las tablas para cada una de las funciones de covarianza, en la parte
superior de cada tabla tenemos el error de cuantificación , el cual menciona el incremento a
nuestro valor de reconstrucción, luego mencionamos por cada N niveles los errores de
reconstrucción total y hacia abajo los diferentes separaciones entre las muestras.
3.5 Resultados PMCR con diferentes funciones de covarianza a la salida de un
filtro.
Tabla 5 PMCR Markoviano
-0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 3.4 3.5 3.6
0
0.05
0.1
0.15
Y: 0.06234
Funció
n d
e E
rror
de R
econstr
ucció
n
Tiempo (t)
Y: 0.146
Y: 0.01126Y: 0.00388Y: 0.001043Y: 0.0003406Y: 0.0002054
Filtro RC de una etapa
0.1875 0.0469 0.0117 0.002929688 7.32E-04 1.83E-04
N
0.2375 0.09683 0.06168 0.05289 0.05069 0.05014
0.2872 0.1465 0.1114 0.1026 0.1004 0.09886
0.3353 0.1958 0.1606 0.1512 0.1496 0.1491
0.3849 0.2438 0.2091 0.1998 0.1981 0.1976
0.4309 0.2914 0.2566 0.2478 0.2457 0.2451
0.5674 0.4266 0.3896 0.3829 0.3807 0.3799
0.6496 0.5088 0.4738 0.4644 0.4628 0.4623
50
Tabla 6 PMCR NO Markoviano RC 2 Etapas
Tabla 7 PMCR NO Markoviano RC de 3 etapas
Filtro RC 2 etapas
0.1875 4.69E-02 0.01171875 2.93E-03 7.32E-04 1.83E-04
N
0.188 0.04737 0.01208 0.003427 0.001179 0.0006807
0.1901 0.01426 0.000574 0.003377 0.002827
0.1963 0.05563 0.02047 0.01169 0.009002 0.008777
0.2078 0.06718 0.03201 0.02324 0.02079 0.02049
0.2267 0.08607 0.05091 0.04212 0.03993 0.03938
0.3152 0.1746 0.1394 0.1306 0.1284 0.1279
0.4094 0.2688 0.2336 0.2248 0.2226 0.2221
Filtro RC de Tres etapas
0.1875 0.0469 0.01171875 0.0029 7.32E-04 0.000183105
N
0.1875 0.0469 0.01174 0.002952 0.0007548 0.0002054
0.1877 0.04703 0.01188 0.003087 0.0008843 0.0003406
0.1884 0.04782 0.01266 0.003872 0.001675 0.001043
0.1912 0.05057 0.01538 0.006626 0.004429 0.00388
0.1986 0.05795 0.02279 0.014 0.01172 0.01126
0.2497 0.109 0.07388 0.06509 0.06289 0.06234
0.3333 0.1927 0.1575 0.1487 0.1465 0.146

51
Fig. 48 Error de reconstrucción promedio
Los valores de error de reconstrucción óptimos fueron tomados de la segunda fila de las
tablas 5, 6 y 7.
Fig. 49 Error de reconstrucción optimo por función
4 8 16 32 64 128
RC1 0.413257143 0.272818571 0.23754 0.228798571 0.226855714 0.226142857
RC2 0.247642857 0.107024286 0.071818571 0.062350143 0.060754 0.060307814
RC3 0.219485714 0.078852857 0.04369 0.034903857 0.0326933 0.032152714
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45Er
ror
de
re
con
stru
ccio
n p
rom
ed
io
4 8 16 32 64 128
RC1 0.2872 0.1465 0.1114 0.1026 0.1004 0.09886
RC2 0.1901 0.04952 0.01426 0.000574 0.003377 0.002827
RC3 0.1877 0.04703 0.01188 0.003087 0.0008843 0.0003406
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Erro
r d
e r
eco
nst
rucc
ion
max

52
Para poder explicar la Fig. 49 es necesario explicar cómo estamos tratando a nuestros
resultados, lo cual nos dice que para un proceso Markoviano (En nuestro caso RC1 ) de 4 hasta
128 Niveles existe una disminución del error del 4 hasta el nivel 32, del 64 al 128 las diferencias
son mínimas observadas en la tabla de magnitudes obtenidas.
En el caso de los procesos no Markovianos(RC2 y RC3) existe cierto comportamiento muy similar,
el error se disminuye considerablemente, en comparación de un proceso Markoviano este
comportamiento se realiza dentro del rango investigados de los niveles, donde la disminución es
considerable y casi precisa simulando hasta 128 Niveles.
Conclusión
En este capítulo analizamos los algoritmos de Muestreo-Cuantificación-Reconstrucción para todos
los procesos descritos en el capítulo 2 y para varios números de los niveles de reconstrucción (L=
4, 8, 16, 32,64 y 128).
Para los algoritmos de este capítulo se utilizó un método simple para describir el error de
cuantificación. Suponiendo que el error de cuantificación durante cualquier nivel tiene la FDP
uniforme con la varianza
. El error total está caracterizado con la suma de dos diferentes
errores:
1) El error descrito con la varianza condicional o el error usual. El cual se define como
parámetro importante dentro del algoritmo óptimo y su reconstrucción.
2) El error de la cuantificación es claro cuando el número de niveles aumenta, el valor de
disminiuria, de lo contrario entre menor sea el numero de niveles mas grande será
nuestro error.
Los gráficos obtenidos nos dan una posibilidad a elegir una manera más simple de obtener los
intervalos de muestreo y los niveles de la cuantificación para muchas variantes del procedimiento
de Muestreo-Cuantificación-Reconstrucción (PMCR).

53
Capí tulo 4
Procedimiento para el cálculo del muestreo
cuantificación y reconstrucción (PMCR) de
procesos gaussianos
En el presente capitulo investigaremos un algoritmo mas de PMCR el cual es más preciso pero un
mayor grado de complejidad, de hecho no se acepta una variante cuando la FDP de error de
cuantificación es uniforme (Capitulo Anterior). Es muy difícil determinar analíticamente la FDP
precisamente, por eso debemos usar el método usando los resultados de la simulación de las
realizaciones de varios procesos Gaussianos.
4.1 Procesos Markovianos
Para este capítulo tenemos que tomar en cuenta que se ocupara una sección de 0s a 40s de la
realización Gaussiana con esperanza matemática igual a cero, varianza igual a 1 y función de
covarianza | | , esto con el fin de hacer claro el comportamiento de la realización y del
cual obtendremos su descripción completa a través de dichas funciones.
Comenzaremos aplicando la función de reconstrucción a la salida del filtro RC con y L =
4 niveles para la función de reconstrucción (4.1).
∑ ∑ | |
(4.1)
Y lo compararemos con la función de reconstrucción del cuantificador (4.2), pondremos especial
énfasis en ( ), la cual se expresara para una muestra cuantificada como entonces nuestra función
queda de la siguiente forma:
∑ ∑ | |
(4.2)
Podemos observar cómo se representan (4.1) y (4.2) en la Fig. 50

54
Fig. 50 Reconstrucción original vs Reconstrucción Cuantificada
Donde el subíndice c de indica el resultado de la simulación de la muestra, la cual se evalúa
mediante el método de redondeo, donde la muestra se coloca en el nivel más próximo. Por ejemplo la
muestra que se encuentra en 2.458 se mueve al siguiente nivel más próximo por lo tanto esta muestra se
convierte en 2.9609. A partir de la diferencia entre la reconstrucción del proceso cuantificado con la
reconstrucción original (4.3), de las dos funciones anteriormente realizadas obtendremos:
(4.3)
En Fig. 51 graficaremos las diferencia de estas funciones para obtener un factor de error de
cuantificación.
Fig. 51 Error promedio de cuantificación
1 1.5 2 2.5 3 3.5
-3
-1.5391
-0.0391
1.4609
2.96093
-0.7338
Dife
ren
cia
de
Re
co
nstr
uccio
ne
s
2.458
-0.09774
Tiempo (t)
Simulada
Cuantificada
0.1201
Tiempo
Dif
eren
cia
de
reco
nst
rucc
ión
Tiempo

55
De la figura anterior observamos la nueva realización que obtuvimos con , ahora para poder sumarla al
error de reconstrucción debemos obtener el error promedio en el tiempo de mediante (4.4):
∫
(4.4)
0.1201
De esta manera adicionamos al error de reconstrucción (4.5) de un proceso Markoviano el error
de cuantificación (4.4), Con lo cual obtenemos nuestro error total en la reconstrucción de un
proceso Markoviano (4.6).
∑∑ | | ( | |)
De esta forma se obtuvo el error de reconstrucción sin cuantificar figura 51 y el error de reconstrucción total
con cuantificación Fig. 52.
Fig. 52 Error de reconstrucción sin cuantificar
0 1 2 3 4 5 6 7
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
0.09967
Fu
nció
n d
e E
rro
r d
e R
eco
nstr
ucció
n
Tiempo (t)
0.09867

56
Fig. 53 Error de reconstrucción total
Con la función de error de reconstrucción se obtuvo el siguiente error total de la figura 53 con
y un error máximo total 0.2198, no se realiza promedio ya que los intervalos para
este ejemplo son periódicos, para poder tener una amplia descripción del procedimiento que se
llevó anteriormente en las siguientes hojas simularemos para 8, 16, 32, 64 y 128 niveles aunado
a intervalos periódicos de , no pretendemos simular mas separaciones entre muestras
ya que este comportamiento fue ampliamente explicado en el capitulo anterior, ahora lo que nos
interesa es observar el comportamiento de nuestro error máximo de reconstrucción, el cual
disminuirá o incrementara según la cantidad de los niveles.
Para nuestro siguiente ejemplo trabajaremos con 8 niveles de los cuales trabajaremos con las
mismas condiciones para nuestro proceso, en Fig. 54 se observan los niveles del cómo se
distribuyen a lo largo del eje Y, las muestras se colocan en las separaciones a los niveles más
cercanos.
0 1 2 3 4 5 6 7
0.12
0.14
0.16
0.18
0.2
0.22
0.24
0.2198
Tiempo (t)
2
0.2198

57
Fig. 54 Reconstrucción original vs reconstrucción cuantificada
De la diferencia de estas dos funciones obtenemos el factor de error de cuantificación y a partir
de sus muestras obtenemos su promedio en el tiempo Fig. 55.
Fig. 55 Promedio en tiempo proceso Markoviano con L=8
Volvemos a obtener una suma del error de reconstrucción más el factor del error de cuantificación
y obtenemos nuestro valor máximo (error de reconstrucción máximo) igual a 0.133 para 8
niveles Fig. 56.
0 2 4 6 8 10 12-3
-2.25
-1.5
-0.75
0
0.75
1.5
2.25
3
Difere
ncia
de R
econstr
uccio
nes
Tiempo (t)
0 1 2 3 4 5 6 7 8 9
0
0.02
0.04
0.06
0.08
0.1
0.12
2
Tiempo (t)
0.0334
Dif
eren
cia
de
reco
nst
rucc
ión
Tiempo
Tiempo

58
Fig. 56 Error de reconstrucción total
En este caso tendremos 16 niveles observando que la respuesta de la función de cuantificación
está aproximándose a la función de reconstrucción, las muestras se asignan a los niveles más
cercanos y entre más chicos los niveles más se acerca a su forma original.
Fig. 57 Diferencia de reconstrucción para 16 niveles
Ahora podemos observar el factor promedio de error de reconstrucción en Fig. 58 de la diferencia
entre las dos reconstrucciones anteriores 0.009893, observamos una disminución
considerable la cual afecta directamente en el error de reconstrucción total.
0 1 2 3 4 5 6 70
0.05
0.1
0.150.133
2
Tiempo (t)
0.133 0.133
0.03338 0.03338
0 1 2 3 4 5 6 7 8-3
-2.625
-2.25
-1.875
-1.5
-1.125
-0.75
-0.375
0
0.375
0.75
1.125
1.5
1.875
2.25
2.625
3
Dife
renc
ia d
e R
econ
stru
ccio
nes
Tiempo (t)
Tiempo
Dif
eren
cia
de
reco
nst
rucc
ión
Tiempo

59
Fig. 58 Promedio en tiempo con L=16
Podemos observar el error de reconstrucción total 0.1095 en Fig. 59 con lo cual notamos la
disminución del error para 16 niveles.
Fig. 59 Error de reconstrucción total
Ahora consideraremos un nuevo escalamiento para 32 niveles Fig. 60, del cual notamos la ligera
semejanza con las diferencias de reconstrucción.
0 1 2 3 4 5 6 7
0
0.005
0.01
0.015
0.02
0.025
0.03
2
Tiempo (t)
0 1 2 3 4 5 6 7 80
0.02
0.04
0.06
0.08
0.1
0.12
2
Tiempo (t)
0.009893
Tiempo
Tiempo

60
Fig. 60 Diferencia de reconstrucción para 32 Niveles RC1
Fig. 61 Factor promedio de error de reconstrucción para 32 niveles RC1
Por lo tanto el factor promedio ahora disminuye a comparación de las anterioes simulaciones
Markovianas Y por consecuencia su error también lo hace.
-1 0 1 2 3 4 5 6 7 8 9-3
-2
-1
0
1
2
3
Difere
ncia
de R
econstr
uccio
nes
Tiempo (t)
1 2 3 4 5 6 70
1
2
3
4
5
6
7
8
9
x 10-3
2
Tiempo (t)
0.001963
Dif
eren
cia
de
reco
nst
rucc
ión
Tiempo
Tiempo
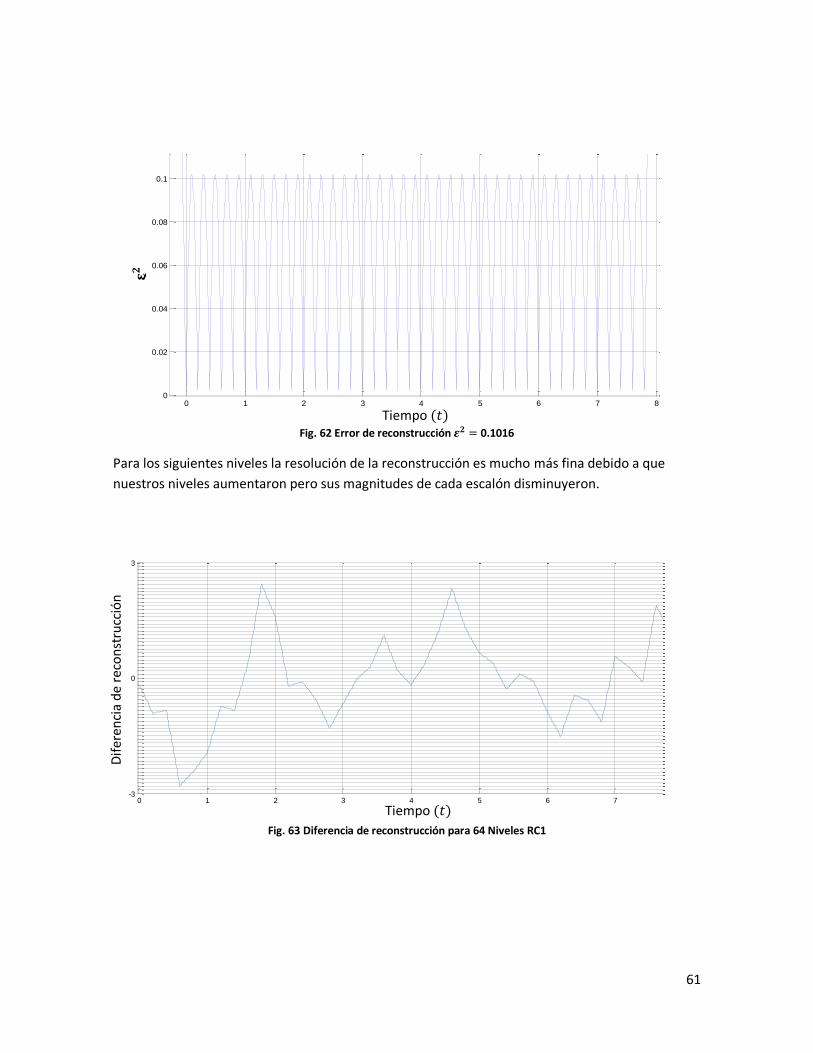
61
Fig. 62 Error de reconstrucción 0.1016
Para los siguientes niveles la resolución de la reconstrucción es mucho más fina debido a que
nuestros niveles aumentaron pero sus magnitudes de cada escalón disminuyeron.
Fig. 63 Diferencia de reconstrucción para 64 Niveles RC1
0 1 2 3 4 5 6 7 80
0.02
0.04
0.06
0.08
0.1
2
Tiempo (t)
0 1 2 3 4 5 6 7-3
0
3
Difere
ncia
de R
econstr
uccio
nes
Tiempo (t)
Tiempo
Dif
eren
cia
de
reco
nst
rucc
ión
Tiempo
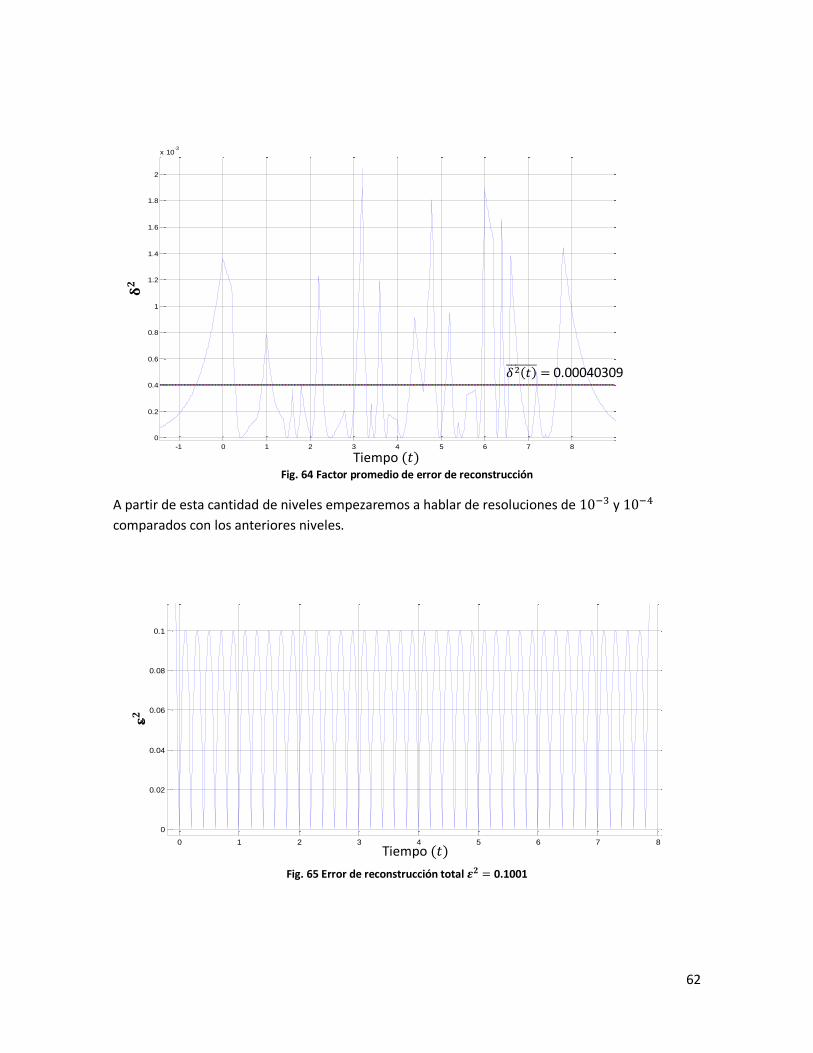
62
Fig. 64 Factor promedio de error de reconstrucción
A partir de esta cantidad de niveles empezaremos a hablar de resoluciones de y
comparados con los anteriores niveles.
Fig. 65 Error de reconstrucción total 0.1001
-1 0 1 2 3 4 5 6 7 8
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
x 10-3
2
Tiempo (t)
0 1 2 3 4 5 6 7 8
0
0.02
0.04
0.06
0.08
0.1
2
Tiempo (t)
0.00040309
Tiempo
Tiempo

63
Llegamos al nivel más alto de nuestras simulaciones con 128 niveles Fig. 66 , comparado con las
anteriores simulaciones de 4, 16, 32 y 64 niveles, las diferencias entre estos fue más notable en los
dos primeros.
Fig. 66 Diferencia de reconstrucción para 128 Niveles RC1
-1 0 1 2 3 4 5 6 7 8-3
0
Difere
ncia
de R
econstr
uccio
nes
Tiempo (t)
Dif
eren
cia
de
reco
nst
rucc
ión
Tiempo

64
Fig. 67 Factor promedio de error de reconstrucción para 128 Niveles
Fig. 68 Error de reconstrucción total 0.09977
0 1 2 3 4 5 6 7 80
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
x 10-4
2
Tiempo (t)
0 1 2 3 4 5 6 7 8
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
2
Tiempo (t)
0.00010478
Tiempo
Tiempo

65
4.2 Procesos no Markovianos
Para esta sección utilizaremos el algoritmo de reconstrucción al proceso de cuantificación, pero
con la diferencia de que utilizaremos en la salida de un filtro de dos etapas con función de
covarianza | | | | , el cual hará que la reconstrucción sea más suave.
Analizaremos como se comporta con cada incremento de nivel y cuál es el efecto del PMCR en
cada una de nuestras simulaciones.
Fig. 69 Diferencia de reconstrucción RC2 4 Niveles
-2 0 2 4 6 8 10-3
-1.5
0
1.5
3
Difere
ncia
de R
econstr
uccio
nes
Tiempo (t)
Dif
eren
cia
de
reco
nst
rucc
ión
Tiempo

66
Fig. 70 Factor promedio de error de reconstrucción
Si comparamos con el resultado de Fig. 51 se obtiene un resultado notable en la disminución de
su promedio. De igual forma el resultado del error de reconstrucción total se suaviza y disminuye
en comparación de un proceso Markoviano.
Fig. 71 Error de reconstrucción total 0.1635
-2 0 2 4 6 8 10
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
2
Tiempo (t)
0 1 2 3 4 5 6 70
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
2
Tiempo (t)
0.1608
Tiempo
Tiempo
Tiempo
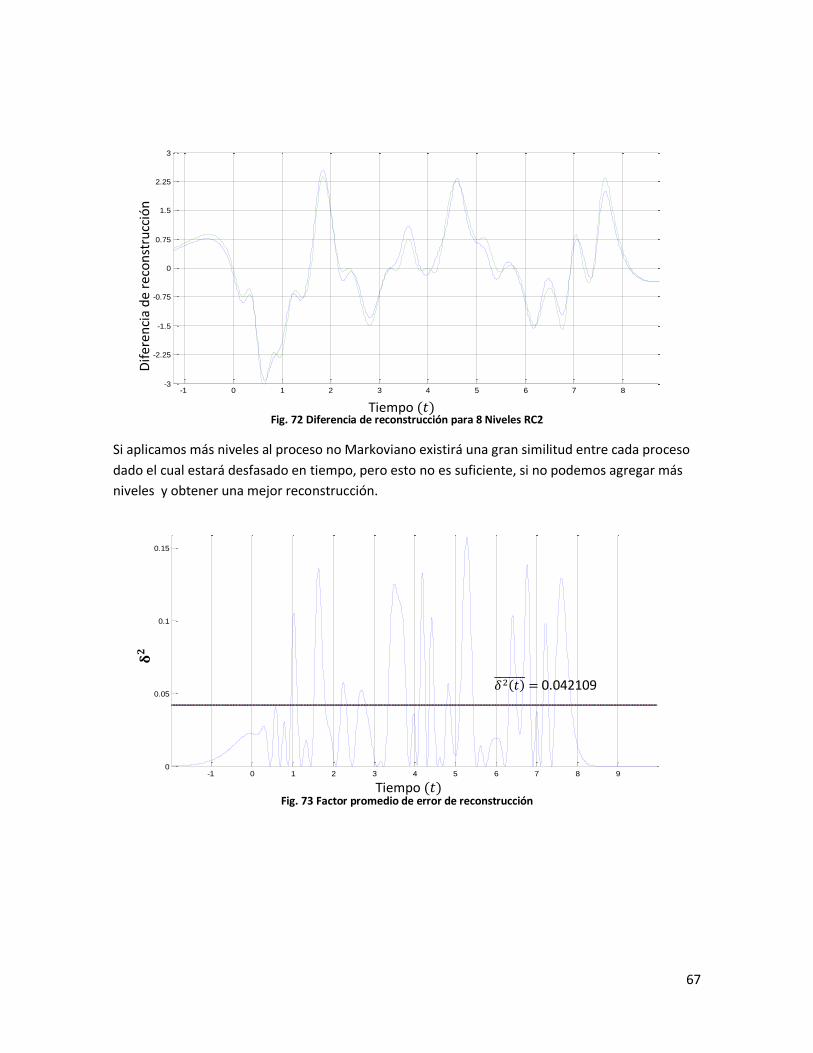
67
Fig. 72 Diferencia de reconstrucción para 8 Niveles RC2
Si aplicamos más niveles al proceso no Markoviano existirá una gran similitud entre cada proceso
dado el cual estará desfasado en tiempo, pero esto no es suficiente, si no podemos agregar más
niveles y obtener una mejor reconstrucción.
Fig. 73 Factor promedio de error de reconstrucción
-1 0 1 2 3 4 5 6 7 8-3
-2.25
-1.5
-0.75
0
0.75
1.5
2.25
3
Difere
ncia
de R
econstr
uccio
nes
Tiempo (t)
-1 0 1 2 3 4 5 6 7 8 90
0.05
0.1
0.15
2
Tiempo (t)
0.042109
Dif
eren
cia
de
reco
nst
rucc
ión
Tiempo
Tiempo
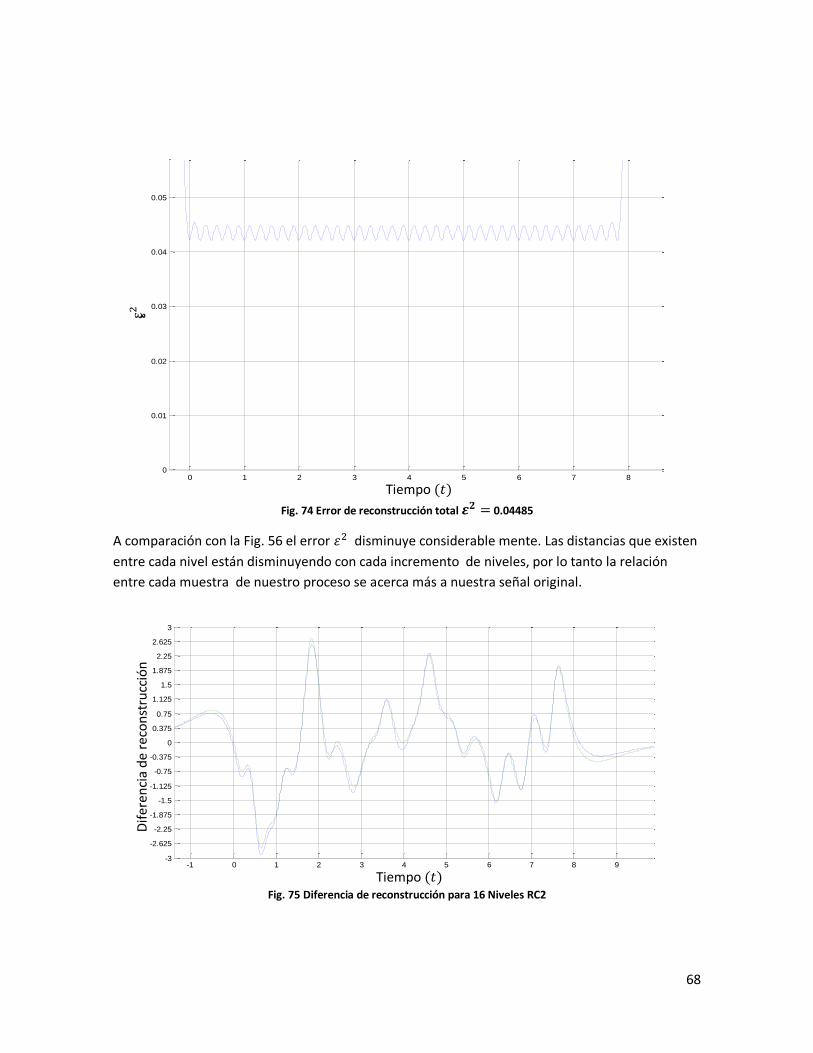
68
Fig. 74 Error de reconstrucción total 0.04485
A comparación con la Fig. 56 el error disminuye considerable mente. Las distancias que existen
entre cada nivel están disminuyendo con cada incremento de niveles, por lo tanto la relación
entre cada muestra de nuestro proceso se acerca más a nuestra señal original.
Fig. 75 Diferencia de reconstrucción para 16 Niveles RC2
0 1 2 3 4 5 6 7 80
0.01
0.02
0.03
0.04
0.05
2
Tiempo (t)
-1 0 1 2 3 4 5 6 7 8 9-3
-2.625
-2.25
-1.875
-1.5
-1.125
-0.75
-0.375
0
0.375
0.75
1.125
1.5
1.875
2.25
2.625
3
Difere
ncia
de R
econstr
uccio
nes
Tiempo (t)
Tiempo
Tiempo
Dif
eren
cia
de
reco
nst
rucc
ión

69
Fig. 76 Factor promedio de error de reconstrucción
Fig. 77 Error de reconstrucción total 0.0145
Se realizaron las mismas simulaciones para los niveles de 32, 64 y 128, como hemos podido
observar de las simulaciones anteriores la tendencia de cada función al aumentar el número de
niveles, el cual mejora su resolución y por lo tanto su reconstrucción comparado contra el proceso
original.
-2 0 2 4 6 8 100
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
2
Tiempo (t)
0 1 2 3 4 5 6 7 80
2
4
6
8
10
12
14
16
x 10-3
2
Tiempo (t)
0.011762
Tiempo
Tiempo
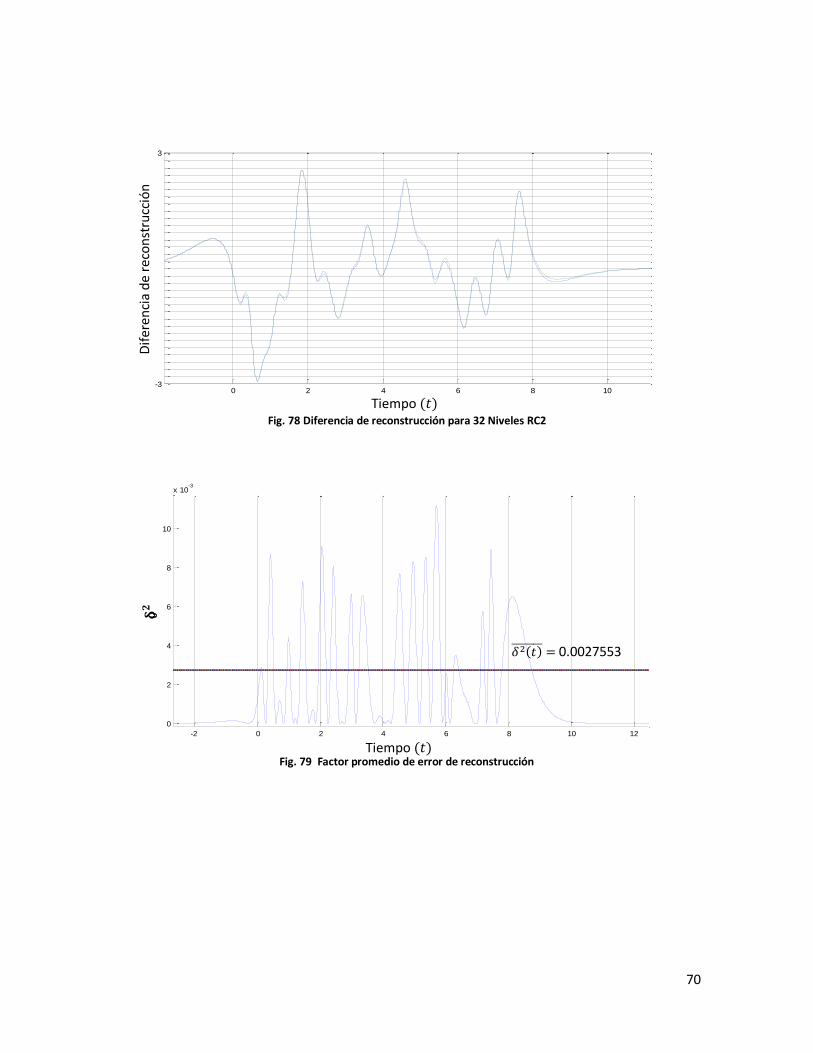
70
Fig. 78 Diferencia de reconstrucción para 32 Niveles RC2
Fig. 79 Factor promedio de error de reconstrucción
0 2 4 6 8 10-3
3D
ifere
ncia
de R
econstr
uccio
nes
Tiempo (t)
-2 0 2 4 6 8 10 12
0
2
4
6
8
10
x 10-3
2
Tiempo (t)
0.0027553
Tiempo
Dif
eren
cia
de
reco
nst
rucc
ión
Tiempo

71
Fig. 80 Error de reconstrucción total 0.005494
Fig. 81 Diferencia de reconstrucción para 64 Niveles RC2
Las líneas horizontales nos indica la cantidad de niveles que estamos ocupando, una resolución un
tanto precisa, y mucho mejor que un proceso cuantificado a 32 Niveles.
0 1 2 3 4 5 6 7 8
0
1
2
3
4
5
6
7
8
9
x 10-3
2
Tiempo (t)
-2 0 2 4 6 8 10-3
0
3
Difere
ncia
de R
econstr
uccio
nes
Tiempo (t)
Tiempo
Tiempo
Dif
eren
cia
de
reco
nst
rucc
ión
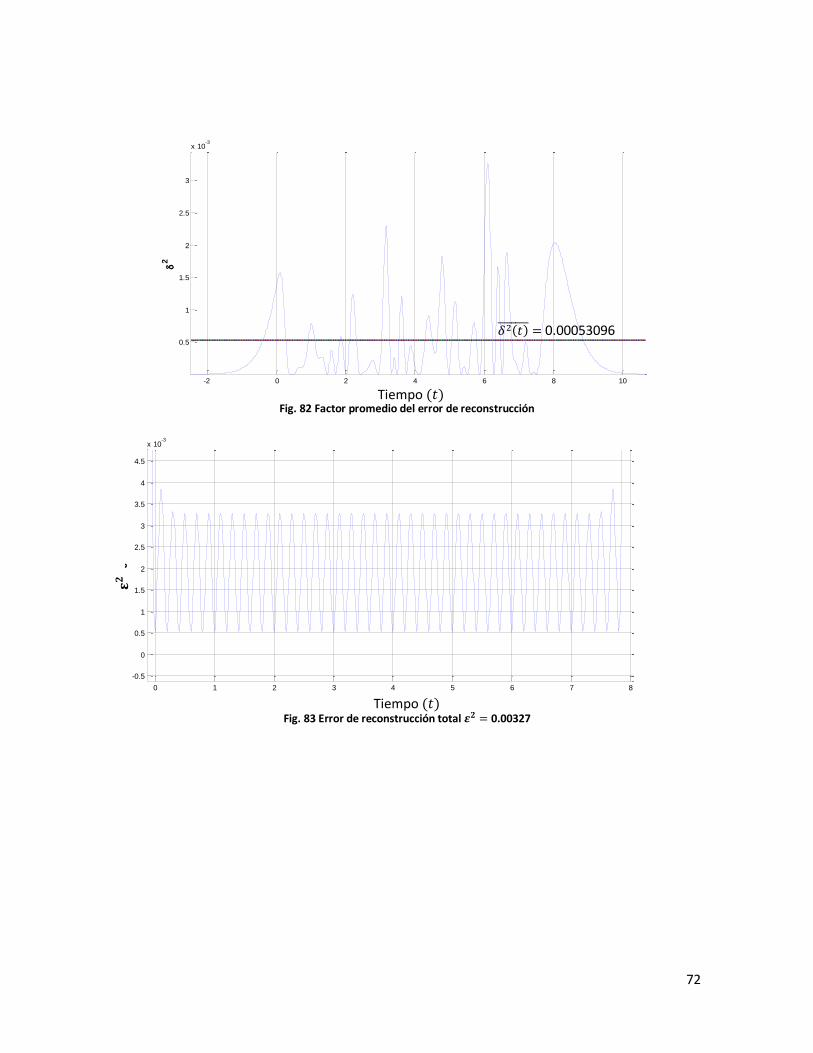
72
Fig. 82 Factor promedio del error de reconstrucción
Fig. 83 Error de reconstrucción total 0.00327
-2 0 2 4 6 8 10
0.5
1
1.5
2
2.5
3
x 10-3
2
Tiempo (t)
0 1 2 3 4 5 6 7 8
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
x 10-3
2
Tiempo (t)
0.00053096
Tiempo
Tiempo

73
Fig. 84 Diferencia de reconstrucción para 128 Niveles
Fig. 85 Factor promedio de error de reconstrucción
-1 0 1 2 3 4 5 6 7 8 9-3
-2
-1
0
1
2
3
Difere
ncia
de R
econstr
uccio
nes
Tiempo (t)
0 2 4 6 8 100
2
4
6
8
10
12
x 10-4
2
Tiempo (t)
0.00014711
Dif
eren
cia
de
reco
nst
rucc
ión
Tiempo
Tiempo

74
Fig. 86 Error de reconstrucción total 0.002886
Con el fin de comparar, evaluar e interpretar nuestros resultados, se generaron las tablas al final
de este capítulo teniendo algunos resultados muy interesantes.
4.3 Procesos no Markovianos a la salida de un filtro RC de 3 etapas
Para esta simulación notamos que en las regiones de extrapolación hay un incremento en las
curvas lo cual es un comportamiento normal para funciones en la salida de un filtro de tres
etapas con función de covarianza | |
| | , podríamos comprobar el
porqué de estos incrementos debido a la función exponencial que se encuentra dentro de la
función de reconstrucción Y la dependencia que existe entre cada muestra lo cual hace que en los
extremos el error sea mayor.
0 1 2 3 4 5 6 7 8
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
x 10-3
2
Tiempo (t)Tiempo

75
Fig. 87 Diferencia de reconstrucción para 4 niveles RC3
Para esta simulación notamos que en Fig. 87 pareciera un desfasamiento en la señal reconstruida,
lo que es en realidad el ajuste en el cambio de niveles al más cercano, esto debido al algoritmo
que estamos utilizando.
Fig. 88 Factor promedio de error de reconstrucción
-2 0 2 4 6 8 10 12-4
-3
-2
-1
0
1
2
3
4
Difere
ncia
de R
econstr
uccio
nes
Tiempo (t)
1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2
Tiempo (t)
0.16801
Dif
eren
cia
de
reco
nst
rucc
ión
Tiempo
Tiempo
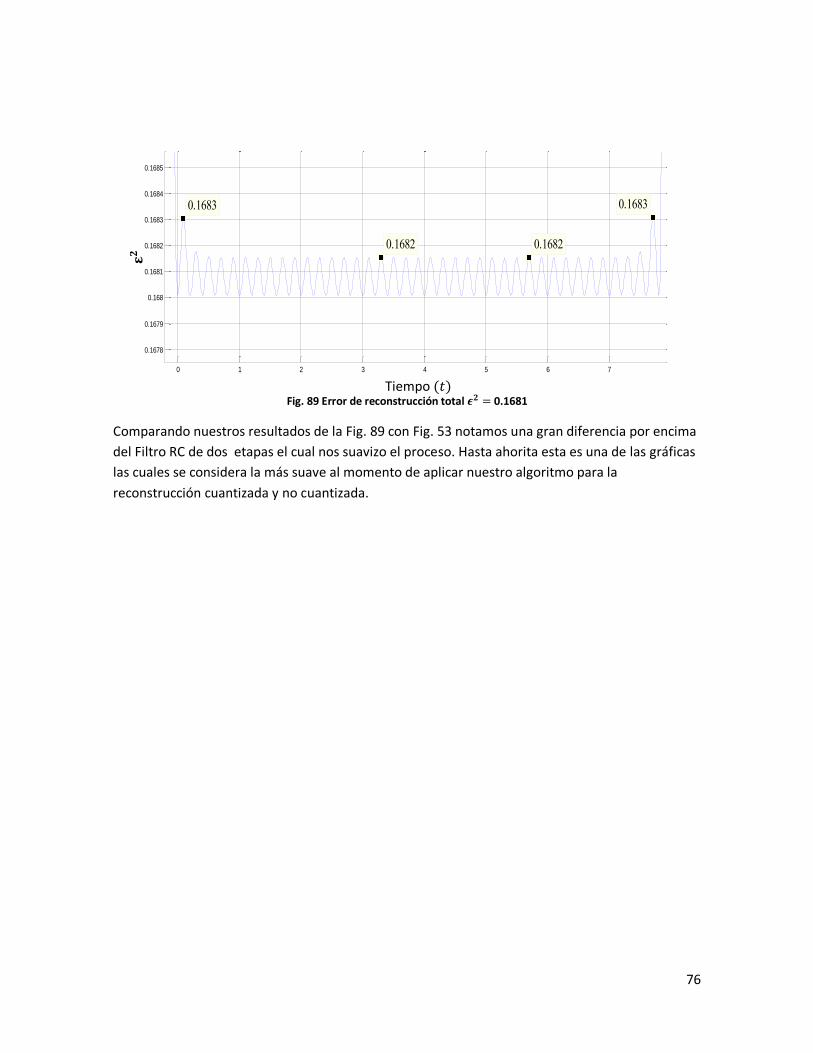
76
Fig. 89 Error de reconstrucción total 0.1681
Comparando nuestros resultados de la Fig. 89 con Fig. 53 notamos una gran diferencia por encima
del Filtro RC de dos etapas el cual nos suavizo el proceso. Hasta ahorita esta es una de las gráficas
las cuales se considera la más suave al momento de aplicar nuestro algoritmo para la
reconstrucción cuantizada y no cuantizada.
0 1 2 3 4 5 6 7
0.1678
0.1679
0.168
0.1681
0.1682
0.1683
0.1684
0.1685
0.1683
2
Tiempo (t)
0.1682
0.1683
0.1682
Tiempo

77
Fig. 90 Diferencia de reconstrucción con 8 Niveles RC3
Fig. 91 Factor promedio de error de reconstrucción
-2 0 2 4 6 8
-3
-2
-1
0
1
2
3
Difere
ncia
de R
econstr
uccio
nes
Tiempo (t)
0 1 2 3 4 5 6 70
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
2
Tiempo (t)
0.0439
Dif
eren
cia
de
reco
nst
rucc
ión
Tiempo
Tiempo

78
Fig. 92 Error de reconstrucción total 0.04405
Fig. 93 Diferencia de reconstrucción para 16 Niveles RC3
0 1 2 3 4 5 6 7
0.0438
0.0439
0.044
0.0441
0.0442
0.0443
0.0442
2
Tiempo (t)
0.044070.04405 0.04405
0.04407
-2 0 2 4 6 8 10
-4
-3
-2
-1
0
1
2
3
Difere
ncia
de R
econstr
uccio
nes
Tiempo (t)
Tiempo
Tiempo
Dif
eren
cia
de
reco
nst
rucc
ión
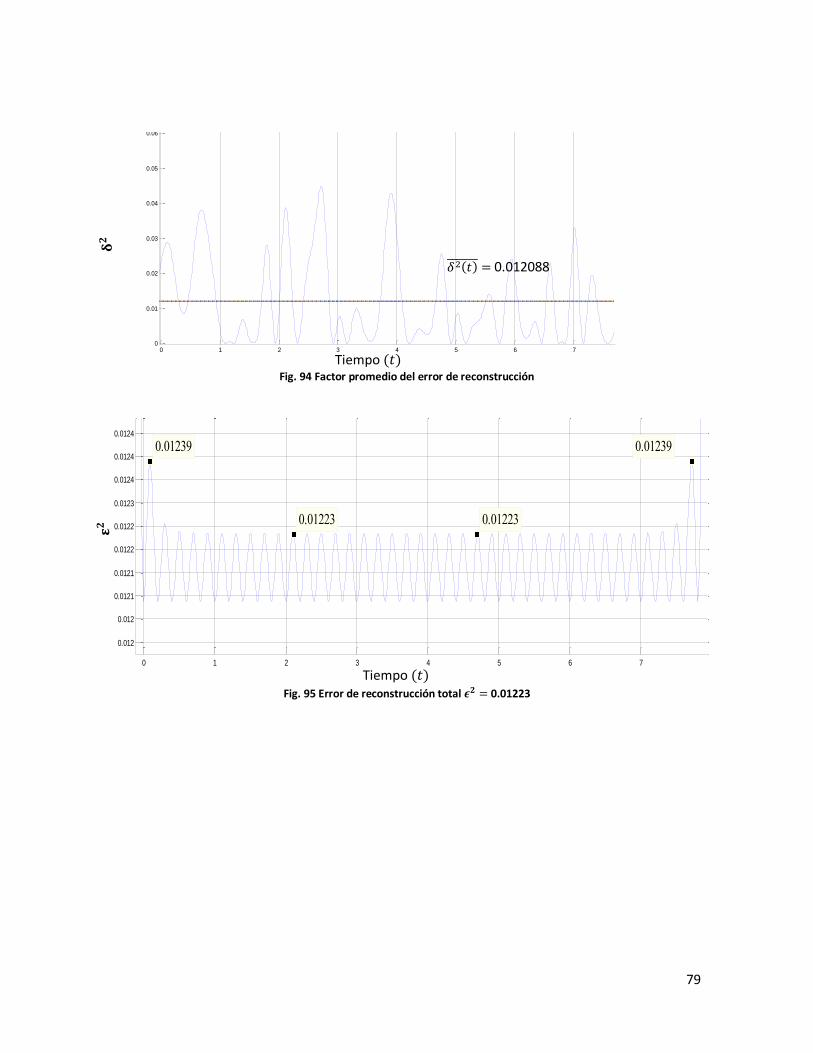
79
Fig. 94 Factor promedio del error de reconstrucción
Fig. 95 Error de reconstrucción total 0.01223
0 1 2 3 4 5 6 70
0.01
0.02
0.03
0.04
0.05
0.06
0.07
2
Tiempo (t)
0 1 2 3 4 5 6 7
0.012
0.012
0.0121
0.0121
0.0122
0.0122
0.0123
0.0124
0.0124
0.0124
2
Tiempo (t)
0.01239
0.01223 0.01223
0.01239
0.012088
Tiempo
Tiempo

80
Ahora para nuestra siguiente simulación de 32 niveles se observara una similitud perfecta a la
señal reconstruida originalmente.
Fig. 96 Diferencia de reconstrucción para 32 Niveles RC3
Fig. 97 Factor de error promedio
Con el error promedio de 29316x10-3 notamos que disminuye considerablemente.
-2 0 2 4 6 8 10
-3
-2
-1
0
1
2
3
Difere
ncia
de R
econstr
uccio
nes
Tiempo (t)
0 1 2 3 4 5 6 7 80
5
10
15
x 10-3
2
Tiempo (t)
0.0029316
Tiempo
Dif
eren
cia
de
reco
nst
rucc
ión
Tiempo

81
Fig. 98 Error de reconstrucción total 0.003078
Fig. 99 Diferencia de reconstrucción para 64 Niveles RC3
La situación para esta nueva figura es muy visible que el error sea imperceptible para el ojo
humano, pero en nuestros resultados ciertas variaciones las tiene que haber. Para lo cual se
definieron las tablas de error máximo de reconstrucción al final del capítulo.
0 1 2 3 4 5 6 7
2.9
2.95
3
3.05
3.1
3.15
3.2
3.25
3.3
x 10-3
2
Tiempo (t)
0.003227
0.003078 0.003078
0.003227
-2 0 2 4 6 8 10
-3
-2
-1
0
1
2
3
Difere
ncia
de R
econstr
uccio
nes
Tiempo (t)
Tiempo
Tiempo
Dif
eren
cia
de
reco
nst
rucc
ión
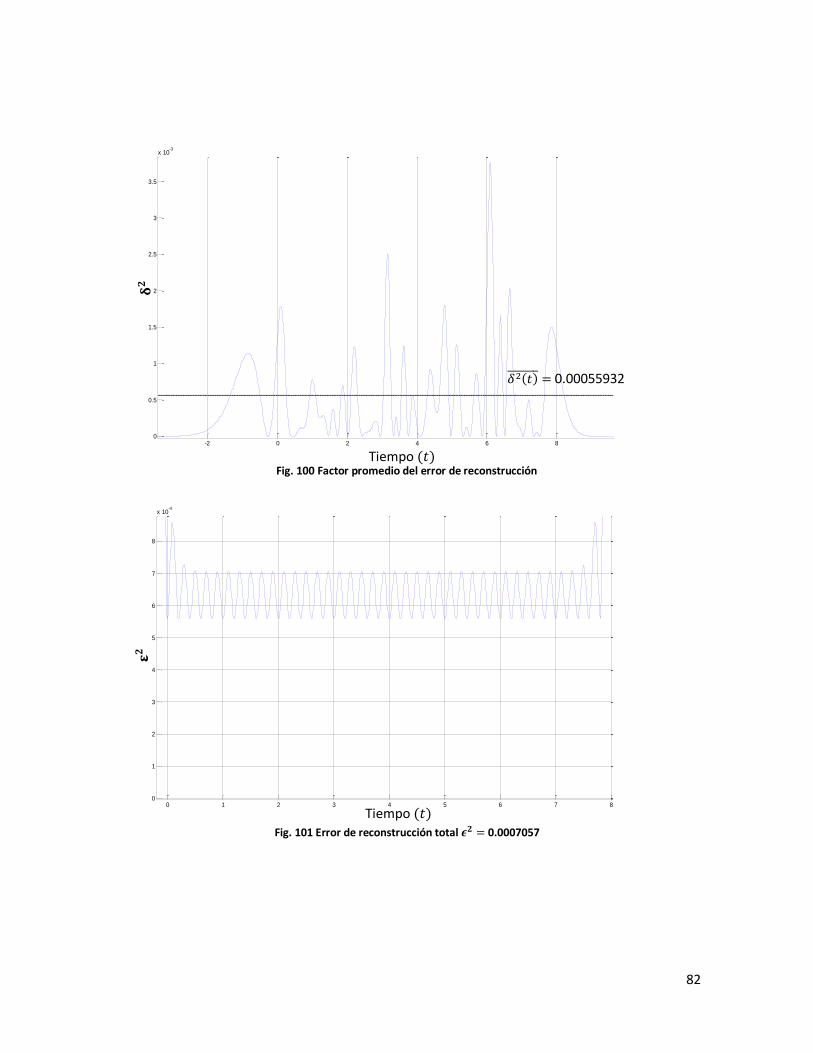
82
Fig. 100 Factor promedio del error de reconstrucción
Fig. 101 Error de reconstrucción total 0.0007057
-2 0 2 4 6 80
0.5
1
1.5
2
2.5
3
3.5
x 10-3
2
Tiempo (t)
0 1 2 3 4 5 6 7 80
1
2
3
4
5
6
7
8
x 10-4
2
Tiempo (t)
0.00055932
Tiempo
Tiempo
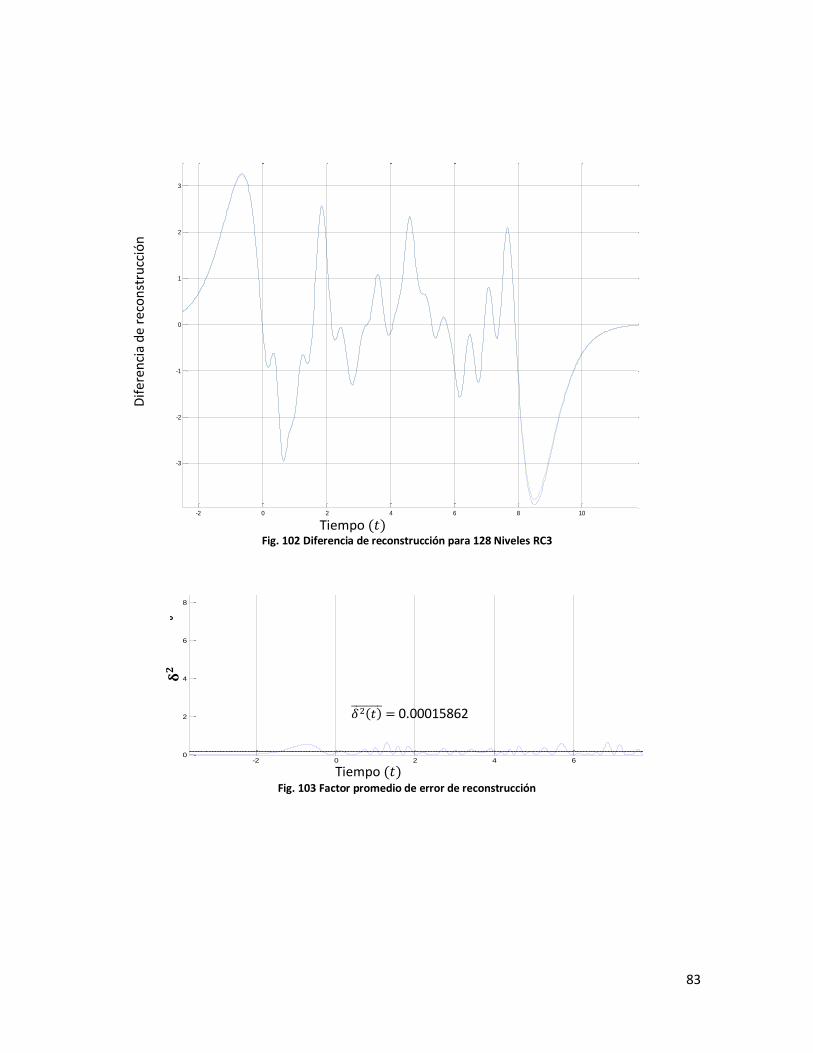
83
Fig. 102 Diferencia de reconstrucción para 128 Niveles RC3
Fig. 103 Factor promedio de error de reconstrucción
-2 0 2 4 6 8 10
-3
-2
-1
0
1
2
3
Difere
ncia
de R
econstr
uccio
nes
Tiempo (t)
-2 0 2 4 6 8 100
2
4
6
8
10
12
14
x 10-3
2
Tiempo (t)
0.00015862
Dif
eren
cia
de
reco
nst
rucc
ión
Tiempo
Tiempo

84
Fig. 104 Error de reconstrucción total 0.000305
Podemos notar en esta última figura la capacidad de resolución en la calidad del
proceso, con hasta 4 decimales a la izquierda podemos decir que en nuestra
reconstrucción influye la función de covarianza utilizada, la cual suaviza nuestro proceso
de una forma casi perfecta y la función de cuantizacion que se simula con 128 niveles, es
una resolucion muy grande por lo cual el error adicional es el mínimo.
0 1 2 3 4 5 6 7
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 10
-4
2
Tiempo (t)
Tiempo

85
Conclusión
En el presente Capitulo 4 restringimos nuestro análisis con un intervalo de muestreo ,
esta variante es importante para la práctica.
En el análisis del error de reconstrucción se incluyen dos tipos de errores:
1. La varianza condicional El cual básicamente es nuestro error de reconstrucción o la
diferencia de nuestro proceso original contra el proceso reconstruido.
2. Error adicional el cual ocurre gracias a que la función de reconstrucción esta reconstruida
en la base no de los muestreos originales pero si en la base de los muestreos que
coinciden con los diferentes niveles de los intervalos de cuantificación. el análisis se
cumplió para los tres modelos de los procesos gaussianos, los resultados de los cálculos
fueron acumulados en las barras de la Fig. 105
La presente metodología nos da una posibilidad de calcular diferentes errores de PMCR, en la base
de los resultados obtenidos, podemos establecer las recomendaciones para elegir los parámetros
importantes del PMCR.
La comparación de los resultados de los cálculos de los errores de la reconstrucción en el capítulo
3 y capitulo 4, nos demuestran que la metodología simple (Capitulo 3) tiene pequeñas diferencias
las cuales se pueden considerar como no tan precisas, dependiendo del tipo de proceso que
deseamos observar.
Fig. 105 Grafico general de resultados de errores de reconstrucción máximo (Entre más cerca del cero se encuentre mejor será la reconstrucción)
4 8 16 32 64 128
RC1 0.2198 0.133 0.1095 0.1016 0.1001 0.09977
RC2 0.1635 0.04485 0.0145 0.005494 0.00327 0.002886
RC3 0.1683 0.04405 0.01223 0.003078 0.0007057 0.000305
0
0.05
0.1
0.15
0.2
0.25
Erro
r d
e r
eco
nst
rucc
ion
max
.

86
Para tener más clara esta situación entre los dos métodos utilizados entre el capítulo 3 y 4
hemos resumido en un conjunto de tablas, cada una con su respectivo error de
reconstrucción al cuantificar y error de reconstrucción promedio, dado que son las
magnitudes que sumamos a nuestro error de reconstrucción en base a la esperanza
matemática condicional. La primera tabla muestra nuestros resultados a la salida de un
filtro RC de 1 etapa.
4 8 16 32 64 128
Tabla 8 Error de reconstrucción de la cuantificación comparado contra el error promedio para los
diferentes niveles aplicados de RC de 1 etapa
Podemos mostrar en la Tabla 8 Esta diferencia la cual resumimos, ya que de esta
magnitud depende nuestro error de reconstrucción total o máximo, en la primera línea
notaremos que estas magnitudes se vuelven a repetir tanto en la etapa 1, como en la dos
y por último en la tres, esta situación es un parámetro que conduce a definir el error de
cuantificación del capítulo 3 como un método más sencillo a diferencia del error promedio
que toma una definición más precisa en su algoritmo.
4 8 16 32 64 128
Tabla 9 Error de reconstrucción de la cuantificación comparado contra el error promedio para los
diferentes niveles aplicados de RC de 2 etapas
Entre la etapa 2 y la etapa 3 se nota una semejanza entre sus errores, pero aun así la
definición del filtro RC3 es un poco más pequeño, La tabla 8 y tabla 9 son casi
semejantes lo cual nos hace pensar que el algoritmo en sus dos últimas etapas puede ser
llevado a la práctica con la certeza de que el error será el mínimo en cualquiera de los dos
casos.
4 8 16 32 64 128
Tabla 10 Error de reconstrucción de la cuantificación comparado contra el error promedio para los
diferentes niveles aplicados de RC de 3 etapas
0.1875 0.0469 0.0117 0.00292969 7.32E-04 1.83E-04
0.1201 0.0334 0.009893 0.001963 4.03E-04 1.05E-04
0.1875 4.69E-02 0.01171875 2.93E-03 7.32E-04 1.83E-04
0.1608 0.042109 0.011762 0.0027553 5.31E-04 1.47E-04
0.1875 0.0469 0.01171875 0.0029 7.32E-04 0.00018311
0.16801 0.0439 0.012088 0.0029316 5.59E-04 1.59E-04
87
Conclusiones Generales
El procedimiento de muestreo cuantificación y reconstrucción juega un papel muy
importante en los procesos estocásticos, se convierte en un método muy práctico para
poder evaluar un sistema de reconstrucción óptimo para el proceso dado.
Con el algoritmo de cuantizacion esta reconstrucción se vuelve un método
extremadamente fino ya que al aumentar la cantidad de niveles, este procedimiento hace
que la resolución de nuestra grafica sea de una mejor calidad y el error de reconstrucción
disminuya consecuentemente.
Se trabajó en conjuntos de muestras, las cuales estarían separadas en tiempo para
poder evaluar los efectos de la relación entre cada muestra y sus efectos por cada nivel
de incremento. En nuestros resultados finales en las tablas se obtiene una perfecta
disminución del error de reconstrucción por lo cual se sugiere manejar filtros RC de 2 y 3
etapas para cuestiones de uso práctico ya que los filtros RC de 1 etapa están muy
alejados por debajo del error mínimo.
Para nuestros procesos hubo 3 diferentes funciones de covarianza. Cada proceso sería
más suave cuando la cantidad de etapas aumenta. La función de reconstrucción es
una función lineal con respecto de las muestras. La función de error de reconstrucción no
depende de los valores de las muestras, pero si depende de los intervalos de muestreo.
Para hacer la comparación correcta de los algoritmos se eligieron los parámetros iguales
para todos los procesos aleatorios con media igual a cero, =1 y . Para obtener un
tiempo de covarianza igual a 1 se necesita elegir el parámetro alfa de manera
diferente para cada tipo de proceso.
Para los algoritmos del capítulo 3 se utilizó un método simple para describir el error de
cuantificación. Suponiendo que el error de cuantificación durante cualquier nivel tiene la
FDP uniforme con la varianza
. El error total está caracterizado con la suma de
dos diferentes errores:
El error descrito con la varianza condicional
El error de la cuantificación es claro cuando el número de niveles aumenta, el valor de
disminiuria.
Para el Capítulo 4 el análisis del error de reconstrucción se incluye dos tipos de errores:
La varianza condicional

88
Error adicional, el cual ocurre gracias a que la función de reconstrucción no está
reconstruida en la base de los muestreos originales pero si en la base de los muestreos
que coinciden con los diferentes niveles de los intervalos de cuantificación.
El análisis se cumplió para los tres modelos de los procesos gaussianos, los resultados
de los cálculos de reconstrucción óptima fueron acumulados en las últimas tablas de este
trabajo.
La presente metodología nos da una posibilidad de calcular diferentes errores de PMCR
con dos diferentes métodos, dependiendo del nivel de precisión que se requiera en la
práctica, en la base de los resultados obtenidos, podemos establecer las
recomendaciones para elegir los parámetros importantes del PMCR.

89
Trabajos citados
1 Kazakov V. Sampling Reconstruction procedures of Gaussian Process Realizations.
Capitulo 9, Pag. 269-298. Probability Interpolation Theory and Aplications,
Edited By Y.S. Shmaliy Nova Science Publisher Inc. USA N.Y. 2012
2 Reyes J. F. Dr. V. Kazakov, “Investigación del procedimiento de muestreo
cuantificación y reconstrucción del proceso Gaussiano en la base de la simulación de
sus realizaciones” CNIES Congreso Nacional de Ingenieria electronica y de sistemas
IPN: 2013.
3 Reyes D. J. Francisco. Dr. V. Kazakov, “Análisis de Error de Reconstrucción del
Procesamiento de Cuantificación en la Base de la Regla de la Esperanza Matemática
Condicional”.IEEE Mexico Congreso ROC Acapulco; 2012.
4 Whittaker. ET. On the Fubctions which are represented by the expansion of the
interpolation Theory. Vol 35. edinburgh 1915.
5 Kotel´nikov VA. On the transmission Capacity of "Esther" and Wire in
electrocomunications. Moscow: iazd. Red. Upr. Suyasi RKKA; 1933.
6 Shannon CE. A mathematical Theory of comunication. Vol 27. Bell System Technical
Journal; 1948.
7 Shannon CE. Comunication in the Precense Of Noiise. Vol 37. Proc. IRE; 1949.
8 Whittaker JM. The Fourier Theory of the Cardinal Function. Vol 1. Edinburg: Math
Sociecity; 1929.
9 Nyquist H. Certain Topics in Telegraph Transmission Theory. Vol 47. AIEE Trans.;
1928.
10 Balakrishnan AV. A Note on the Sampling Principle For Continuos Signals. Vol IT-
3. IRE Trans on Inf. Theory; 1957.
11 D. P. Petersen and D. Middleton. “Sampling and Reconstruction of Wave Number-Limited Functions in N Dimensional Euclidean Spaces”, Information and Control, Vol. 5, pp. 279-323, 1962.
12 A. J. Jerri. "The Shannon Sampling Theorem - Its Various Extensions and
Applications: A Tutorial Review", Proc. IEEE, Vol. 65, No. 11, pp. 1565-1596,
1977.
13 R. J. Marks II, Editor, “Advanced Topics on Shannon Sampling and
Interpolation Theonf, Springer-Veriag, New York, 360 p.,1993.
14 F. Marvasti, Editor. “Nonurdform Sampling: Theory and Practice”, Kluwer
Academic/Plenum Publishers, New York, p. 924, 2001.
15 I. Zayed. “Advances in Shannon's Sampling Theonf, Boca Raton: CRC Press,
334 p., 1993.

90
16 F. J. Beut^er. “Sampling Theorem and bases in a Hilbert Space”, Information and
Control, Vol. 4, pj). 97-rl 17, 1961.
17 S’. P. Lloyd. “A Sampling Theorem for Stationary (Wide Sense) Stochastic
Processes", Trans. Amer. Math. Soc., Vol. 92, pp. 1-12, 1959.
18 M. Zakai. “Band-Limited Functions and the Sampling Theorem”, Information and
Conirotr Vol. 8, ppt 143-158, 1965.
19 W. A. Gardner. “A Sampling Theorem for Nonstationary Random Processes”, IEEE
Trans, on Information theory, Vol. IT-18, pp. 808-809, Nov. 1972.
20 Z. A. Piranashvili. “On the Problem of Interpolation of Stochastic Processes”, Theory
of Probability and its Applications, Vol. 12, pp. 647-657, 1967.
21 B. D. Sharma and F. C. Metha. “A Generalized Sampling Theorem for
Nonstationary Processes”, J. Cybematics, pp. 87-95, 1974.
J. J. Clark, M. R. Palmer, P. D. Lawrence. “A Transformation Method for the
22 R.L. Stratonovich. “Topics in the Theory of Random Noise”, Vol. I, N.Y. Gordon &
Breach., 1963.
23 Walpole “Probabilidad y estadística para Ingenieros”, Prentice Hall, Sexta
Edición,1999, pp. 143-144.
24 Max J. “Quantizing For Minimum Distortion”. IEEE Trans. 1977, V. ASS pp.
25,115
25 Butzer AZaPL. Lagrange Interpolation And Sampling Therorems / NoUniform
sampling : Theory and Practice. Nueva York: F. Marvasti / Kluwer Academic;
2001.

91
Apé ndicé Programas
%% Calculo de la funcion de Recconstruccion y Error de reconstruccion
fprintf('PROGRAMA PARA CALCULAR LA FUNCIÓN DE RECONSTRUCCIÓN Y LA FUNCIÓN
DE ERROR DE RECONSTRUCCIÓN \nDE UN PROCESO GAUSSIANO') fprintf('\n\nCONTESTE LO SIGUIENTE:')
%etapa=input('\n\nTIPO DE FILTRO: \n 1. FILTRO RC DE UNA ETAPA \n 2.
FILTRO RC DE DOS ETAPAS \n 3. FILTRO RC DE TRES ETAPAS \n 4. FILTRO RC
IDEAL\n '); % N=input('\n\n Número de muestras: ');
%delta=input('\n\n Rango de separación entre muestras:');
for i=1:N fprintf('\n\n Valor de la muestra %d:', i) x(i)=input(' = '); end
delta=[0.0 0.1 0.3 0.6 1.0 1.5 2.3 3.3]; for i=1:N T(i)=delta(i); end
t=-5:0.01:(0.5.*(N+14));% para rc 1 etapas = -5 2 etapas -40 3 etapas
[m,n]=size(t); %Magnitud de t
%FILTRO RC DE UNA ETAPA if etapa==1 alfa=1; %Alfa %Matriz de covarianza a la entrada for i=1:N for j=1:N mce(i,j)=exp(-alfa.*abs(T(i)-T(j))); end end

92
%Matriz inversa mi=inv(mce); %Función básica for j=1:N fun=0; for i=1:N fun=fun+exp(-alfa.*abs(t-T(i))).*mi(i,j); end for i=1:n funbas(j,i)=fun(i); end end %Primer momento condicional a la entrada (Individual) for j=1:N unoentind=0; for i=1:N entind=exp(-alfa.*abs(t-T(i))).*mi(i,j).*x(j); unoentind=unoentind+entind; end for i=1:n uei(j,i)=unoentind(i); end end %Primer momento condicional a la entrada (Función de reconstrucción) unoent=0; for i=1:N for j=1:N ent=exp(-alfa.*abs(t-T(i))).*mi(i,j).*x(j); unoent=unoent+ent; end end
%Funcion de Cuantizacion recibimos la realizacion cuantizada y los %incrementos figure(4) [DeltaL, x1]=cuantizreyes(3,unoent,t); %error de reconstruccion cuantificada aplicando distribucion uniforme Ec=(DeltaL^2)/12;
%Varianza condicional a la entrada (Función de error de
reconstrucción) error=0; for i=1:N
for j=1:N
error=error+mi(i,j).*exp(-alfa.*abs(T(j)-t)).*exp(-
alfa.*abs(t-T(i))); %error=error+exp(-alfa.*abs(t-T(i))).*mi(i,j).*exp(-
alfa.*abs(T(j)-t)); % error=error+Ec; varent=1-error;
93
end % varent=varent+Ec; end end
%FILTRO RC DE DOS ETAPAS if etapa==2 alfa=2; %Alfa %Matriz de covarianza a la entrada for i=1:N for j=1:N mce(i,j)=(1+alfa.*abs(T(i)-T(j))).*exp(-alfa.*abs(T(i)-
T(j))); end end %Matriz inversa mi=inv(mce); %Función básica for j=1:N fun=0; for i=1:N fun=fun+(1+alfa.*abs(t-T(i))).*exp(-alfa.*abs(t-
T(i))).*mi(i,j); end for i=1:n funbas(j,i)=fun(i); end end %Primer momento condicional a la entrada (Individual) for j=1:N unoentind=0; for i=1:N entind=(1+alfa.*abs(t-T(i))).*exp(-alfa.*abs(t-
T(i))).*mi(i,j).*x(j); unoentind=unoentind+entind; end for i=1:n uei(j,i)=unoentind(i); end end %Primer momento condicional a la entrada (Función de reconstrucción) unoent=0; for i=1:N for j=1:N ent=(1+alfa.*abs(t-T(i))).*exp(-alfa.*abs(t-
T(i))).*mi(i,j).*x(j); unoent=unoent+ent; end end figure(4) [DeltaL, x1]=cuantizreyes(4,unoent,t); %error de reconstruccion cuantificada aplicando distribucion uniforme Ec=(DeltaL^2)/12;

94
%Varianza condicional a la entrada (Función de error de
reconstrucción) error=0; for i=1:N for j=1:N error=error+(1+alfa.*abs(t-T(i))).*exp(-alfa.*abs(t-
T(i))).*mi(i,j).*(1+alfa.*abs(T(j)-t)).*exp(-alfa.*abs(T(j)-t));
varent=1-error; end varent=varent+Ec; end
end
%FILTRO RC DE TRES ETAPAS if etapa==3 alfa=8/3; %Alfa %Matriz de covarianza a la entrada for i=1:N for j=1:N mce(i,j)=(1+alfa.*abs(T(i)-T(j))+(((alfa.^2).*((T(i)-
T(j)).^2))/3)).*exp(-alfa.*abs(T(i)-T(j))); end end %Matriz inversa mi=inv(mce); %Función básica for j=1:N fun=0; for i=1:N fun=fun+((1+alfa.*abs(t-T(i))+(((alfa.^2).*((t-
T(i)).^2))/3)).*exp(-alfa.*abs(t-T(i)))).*mi(i,j); end for i=1:n funbas(j,i)=fun(i); end end %Primer momento condicional a la entrada (Individual) for j=1:N unoentind=0; for i=1:N entind=((1+alfa.*abs(t-T(i))+(((alfa.^2).*((t-
T(i)).^2))/3)).*exp(-alfa.*abs(t-T(i)))).*mi(i,j).*x(j); unoentind=unoentind+entind; end for i=1:n uei(j,i)=unoentind(i); end end %Primer momento condicional a la entrada (Función de reconstrucción)

95
unoent=0; for i=1:N for j=1:N ent=((1+alfa.*abs(t-T(i))+(((alfa.^2).*((t-
T(i)).^2))/3)).*exp(-alfa.*abs(t-T(i)))).*mi(i,j).*x(j); unoent=unoent+ent; end end figure(4) [DeltaL, x1]=cuantizreyes(2,unoent,t); %error de reconstruccion cuantificada aplicando distribucion uniforme Ec=(DeltaL^2)/12;
%Varianza condicional a la entrada (Función de error de
reconstrucción) error=0; for i=1:N for j=1:N error=error+((1+alfa.*abs(t-T(i))+(((alfa.^2).*((t-
T(i)).^2))/3)).*exp(-alfa.*abs(t-T(i)))).*mi(i,j).*((1+alfa.*abs(T(j)-
t)+(((alfa.^2).*((T(j)-t).^2))/3)).*exp(-alfa.*abs(T(j)-t))); varent=1-error; end varent=varent+Ec; end end
% %FILTRO RC IDEAL if etapa==4 for i=1:N for j=1:N mce(i,j)=sin (2.*pi.*abs(T(i)-
T(j)))./(2.*pi.*abs(T(i)-T(j)));
if (i== j) mce(i,j)=1; end end end %Matriz inversa mi=inv(mce);
%Función básica for j=1:N fun=0; for i=1:N fun=fun+(sin (2.*pi.*(t-T(i))))./(2.*pi.*(t-T(i))).*mi(i,j); % fun=fun+sin (2.*pi.*(t(i)-T(j))); % fun=fun+fun; end for i=1:n funbas(j,i)=fun(i);

96
end end %Función de reconstrucción unoent=0; for j=1:N
ent=x(j).*((sin (2.*pi.*(t-T(j))))./(2.*pi.*(t-T(j)))); unoent=unoent+ent; end %funcion de error de reconstruccion error=0; for i=1:N for j=1:N error=error+((sin (2.*pi.*(t-T(i))))./(2.*pi.*(t-
T(i)))).*mi(i,j).*((sin (2.*pi.*(T(j)-t)))./(2.*pi.*(T(j)-t))); varent=1-error; end end
end
figure(1) %Función de reconstrucción plot(t,unoent) ylabel('Función de Reconstrucción') xlabel('Tiempo (t)') grid on
figure(2) %Función de error de reconstrucción hold on; plot(t,varent)
ylabel('Función de Error de Reconstrucción') xlabel('Tiempo (t)') grid on
figure(3) %Función básica hold on color=['r' 'b' 'c' 'y' 'g' 'm']; for i=1:N plot(t,funbas(i,:),color(i)) ylabel('Función Básica') xlabel('Tiempo (t)') grid on end
97
vmu=255; senal=unoent/max(abs(unoent));
Fx=sign(senal).*((log (1+(vmu*abs(senal))))/(log(1+vmu))); % haciendo la cuantificacion Fy=zeros(size(Fx)); for i=1: size(Fx)
if Fx(i)>0, b1=0; else b1=1; end up=1/8160; Fy(i)=abs(Fx(i)); end
%%calculo para el numero de niveles Cuantiz.M n=3; %Numero de Niveles N=5; %numero de muestras P=500; %numero de simulaciones T=10; %longitud del intervalo simulado delta=T/(N-1); %intervalo de muestreo alfa=1; mu=0; sigma=1; %alfa, media y varianza; NOTA. Es necesario
cambiar alfa de acuerdo a la etapa q se quiere simular t=0:delta:T; x=[-2.5 -0.3 1.5 2.6 2.5];
maximo=3/n; inter=-3:maximo:3; n=length(inter); N=n; for y=1:length(x) a=y; for i=1:N-1 % if (i==N-1 if (x(y)>=inter(i)) && (x(y)<inter(i+1)) op=(inter(i)+inter(i+1))/2; if x(y)<=op x1(y)=inter(i); else x1(y)=inter(i+1); end end end end plot(t,x,'b'); hold on;

98
plot(t,x1,'g--');
%%Programa para la simulacion de procesos aleatorios a la salida de
filtros %de una, dos y tres etapas y sus funciones de covarianza.
%% datos preliminares para el programa clear all N=25; %numero de muestras P=500; %numero de simulaciones T=40; %longitud del intervalo simulado delta=T/(N-1); %intervalo de muestreo alfa=1; mu=0; sigma=1; %alfa, media y varianza; NOTA. Es necesario
cambiar alfa de acuerdo a la etapa q se quiere simular t=0:delta:T; cero=zeros(1,N); x=zeros(1,N); %vector para el proceso x y=zeros(1,N); %vector para el proceso y e=zeros(1,N); %vector para el ruido
Rtx=zeros(1,N); %vector para la funcion de covarianza una etapa Rty=zeros(1,N); %vector para la funcion de covarianza dos etapas Rtz=zeros(1,N); %vector para la funcion de covarianza tres etapas
%% funciones de covarianza teoricas Rteorx=exp(-alfa*t); %RC UNA ETAPAS Rteory=(1+alfa*t).*exp(-alfa*t); %RC DOS ETAPAS Rteorz=(1+alfa*t+(alfa^2*t.^2/3)).*exp(-alfa*t);% RC TRES ETAPAS %% S=sqrt(1-exp(-2*alfa*(delta))); %factor del ruido
for c=1:P; %este for controla el número de simulaciones %% GENERACION DE PROCESOS %En esta parte se genera X = RC UNA ETAPA
e = normrnd(mu,sigma,N,1); %RUIDO CON DISTRIBUCION NORMAL; TAMBIEN SE
PUEDE UTILIZAR AWGN x(1)=mean(e); %solo es necesario definir el valor de la primer
muestra. esta se hace aleatoriamente
%este for genera el proceso a la salida del filtro RC de una etapa %ver tesis Belyaev
for i=2:N; x(i)=(exp(-alfa*delta)*x(i-1))+S*e(i); end %%%%%%%%%%%%%%%%%%%%%%%%%%
%en esta parte se genera Y = RC DOS ETAPAS
a0=1-exp(-alfa*(delta)/2);

99
a1=a0*exp(-alfa*(delta)/2); b1=exp(-alfa*delta);
y(1)=x(1); %En este caso se elige la primer muestra del proceso X como la
primer muestra del proceso Y %es decir, alimentamos la segunda etapa con el proceso a la %salida del filtro de una etapa
for i=2:N-1 %se genera el proceso a la salida de la segunda etapa y(i)=x(i-1)*a0+x(i-1)*a1+y(i-1)*b1; end y=y/std(y); %es necesario dividir entre la desviación estandar porque
se pierde energia de filtro en filtro "SE NORMALIZA"
%%%%%%%%%%%%%%%%%%%%%%%%%%
%En esta parte se genera Z= RC TRES ETAPAS % for j=1:NE; EN ESTE FOR SE DETERMINA 2+NE numero de etapas %POR EJEMPLO; SI SE QUIERE SIMULAR 5 ETAPAS
NE=3 z=zeros(1,N); z(1)=y(1); % dsv=1; %la primer vez que corre el "for NE" la
desviacion % estandar es uno % for k=1:2; % z=z/dsv; for i=2:N-1; %se genera la tercer etapa o la NE+2 ETAPAS en
su caso z(i)=y(i-1)+b1*(z(i-1)-y(i-1)); end dsv=std(z); %en el caso que se active NE se emplea dsv para %normalizar el proceso en la divicion z=z/dsv % end % end
%% Calculo de funciones de covarianza
Rx=zeros(1,N); %se define el vector Rx de la covarianza por cuestiones
de velocidad Ry=zeros(1,N); %se define el vector Ry de la covarianza por cuestiones
de velocidad Rz=zeros(1,N); %se define el vector Rz de la covarianza por cuestiones
de velocidad
%%%%%%%%%%funcion de covarianza de una etapa
for i=0:N-1; g=1:N-i; h=1+i:N;

100
f=(x(g)).*(x(h)); Rx(i+1)=(sum(f))/length(g); end Rtx=Rtx+Rx/P;
%%%%%%%%%%función de covarianza de dos etapas
for i=0:N-1; g=1:N-i; h=1+i:N; f=y(g).*y(h) ; Ry(i+1)=sum(f)/length(g); end Rty=Rty+Ry/P;
%%%%%%%%%Función de covarianza de tres etapas z=z/std(z); %es necesario dividir entre la desviación estandar porque se
pierde energia de filtro en filtro "SE NORMALIZA"
for i=0:N-1; g=1:N-i; h=1+i:N; f=z(g).*z(h) ; Rz(i+1)=sum(f)/length(g); end Rtz=Rtz+Rz/P; c % MUESTRA EL NUMERO DE SIMULACION QUE SE
ENCUENTRA CALCULANDO end %% se grafican las curvas de la funcion de covarianza hold on; figure(1); plot(t,Rteorx,t,Rtx,'R');xlim([0 7]);
title(['FUNCIONDE COVARIANZA UNA ETAPA TEORICO Y SIMULADO CON
ALFA=',num2str(alfa)]); hold on; figure(2); plot(t,Rteory,t,Rty,'R');xlim([0 7]);
title(['FUNCIONDE COVARIANZA DOS ETAPAS TEORICO Y SIMULADO CON
ALFA=',num2str(alfa)]); hold on; figure(3); plot(t,Rteorz,t,Rtz,'R');xlim([0 7]);
title(['FUNCIONDE COVARIANZA TRES ETAPAS TEORICO Y SIMULADO CON
ALFA=',num2str(alfa)]); figure(4);plot(t,x,t,y,t,z); title('PROCESOS SIMULADOS PARA UNA DOS Y
TRES ETAPAS ');

101
Publicacionés
102

103

104

105

106

107

108
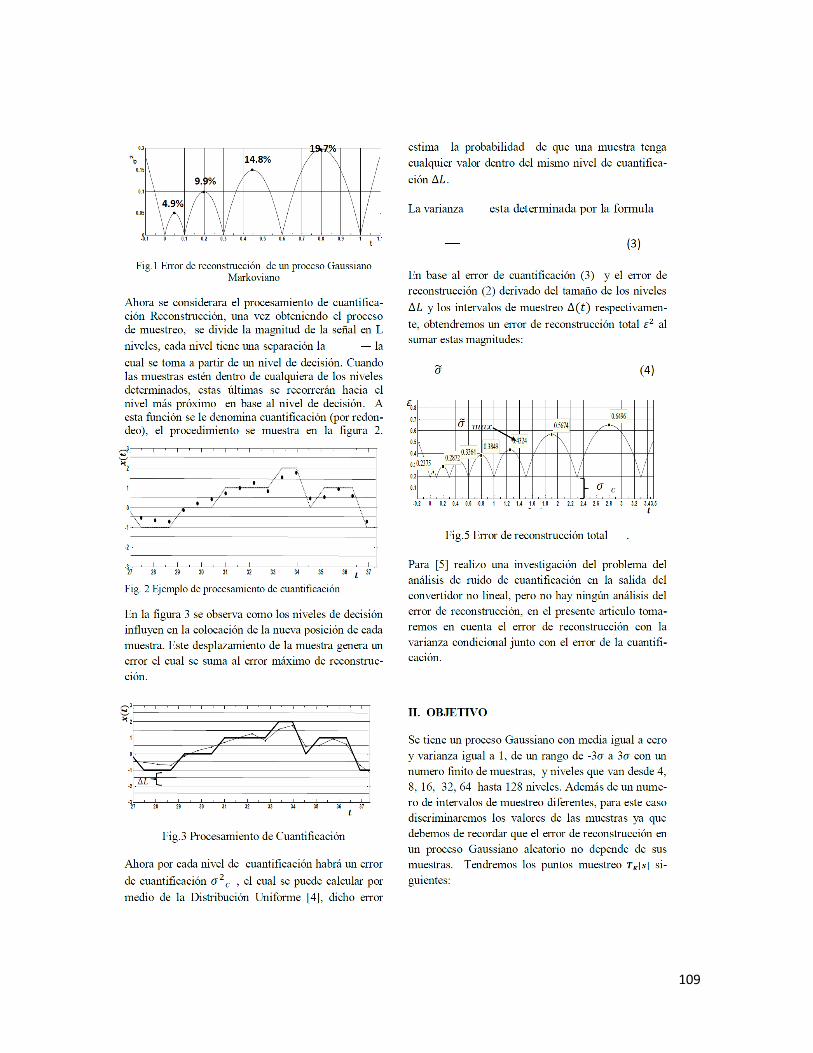
109

110
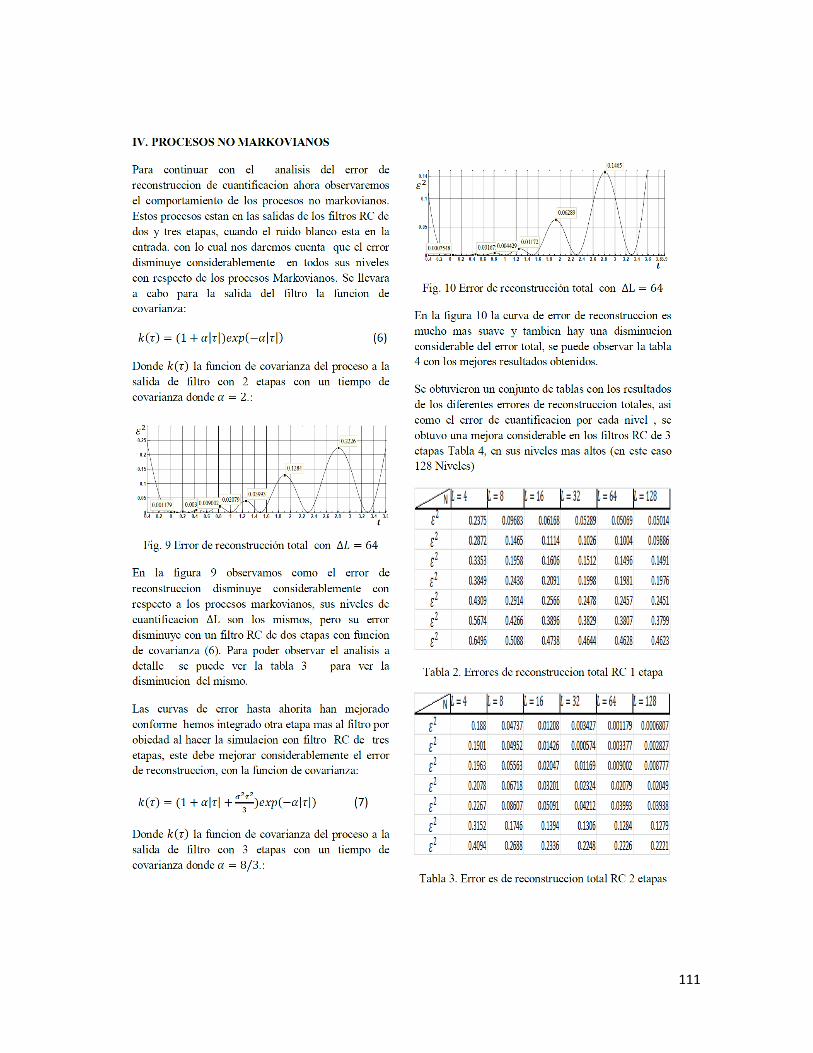
111

112