tesis doctoral para cgpi
TRANSCRIPT

INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y
ELÉCTRICA UNIDAD PROFESIONAL ADOLFO LÓPEZ MATEOS
SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
ESTUDIO DE LA FRACTURA EN EL ROTOR DEL SISTEMA ROTOR-MASA-CHUMACERAS
T E S I S
QUE PARA OBTENER EL GRADO DE
DOCTOR EN CIENCIAS
CON ESPECIALIDAD EN INGENIERÍA MECÁNICA
P R E S E N T A EL :
M. EN C. HOMERO JIMÉNEZ RABIELA
DIRECTOR DE TESIS:
DR. GUILLERMO URRIOLAGOITIA CALDERÓN
México D.F. Diciembre de 2004


Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________5
A G R A D E C I M I E N T O S
La realización de este proyecto de investigación ESTUDIO DE LA FRACTURA
EN EL ROTOR DEL SISTEMA ROTOR-MASA-CHUMACERAS ha sido
posible con la colaboración de las personas e instituciones siguientes:
Dr. GUILLERMO URRIOLAGOITIA CALDERÓN. Director de tesis y miembro de la Comisión Revisora de Tesis, principal
impulsor del programa de Doctorado en Ciencias en Ingeniería Mecánica.
Su apoyo orientación y confianza han sido trascendentes en mi formación
académica de posgrado.
Dr. LUIS HÉCTOR HERNÁNDEZ GÓMEZ. Profesor investigador de la SEPI – ESIME-IPN.
Su orientación en aspectos técnicos y académicos fue constante durante el
trabajo doctoral.
Dr. ORLANDO SUSARREY HUERTA. Profesor investigador de la SEPI – ESIME-IPN.
Su apoyo en temas relacionados con fatiga fue muy importante para lograr los
objetivos del trabajo doctoral.
Dr. ANTONIO DE ITA DE LA TORRE. Jefe del Área de Ciencia de Materiales, Departamento de Materiales, División
de Ciencias Básicas e Ingeniería, Universidad Autónoma Metropolitana Unidad
Azcapotzalco. Su apoyo hizo posible efectuar fisuras, de espesor controlado y
profundidad exacta, por el proceso de electro erosión.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________6
Dr. LUCIO VÁZQUEZ BRISEÑO. Profesor investigador del Área de Ciencia de Materiales, Departamento de
Materiales, División de Ciencias Básicas e Ingeniería, Universidad Autónoma
Metropolitana Unidad Azcapotzalco. Su apoyo hizo posible el estudio
metalurgico del rotor.
Dr. ALEXANDER BALANKIN. Dr. ALEJANDRO RODRÍGUEZ CASTELLANOS. Profesores investigadores de la SEPI – ESIME-IPN.
Su interés en el trabajo doctoral propició importantes comentarios y
observaciones en el campo de la fatiga.
Dr. JOSÉ RUBÉN DORANTES RODRÍGUEZ. Dr. CARLOS ALBERTO RIVERA SALAMANCA. Jefes del Departamento de Energía de la Universidad Autónoma Metropolitana
1998-2002 y 2002-2006, respectivamente.
Con el apoyo logístico y económico del primero fue posible terminar la maestría
e iniciar el doctorado. Con el apoyo del segundo me ha sido posible continuar
con mi trabajo doctoral.
Dr. JOSÉ SOLÍS ROMERO. Coordinador de Investigación del Instituto Tecnológico de Tlalnepantla.
Sus sugerencias en el aspecto molecular del crecimiento de la fractura mejoró
el trabajo doctoral.
Dr. JULIO CÉSAR GÓMEZ MANCILLA. Profesor investigador de la SEPI – ESIME-IPN.
Sus enseñanzas hicieron posible comprender con mayor detalle el
comportamiento de un rotor, fisurado, y desbalanceado.
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________7
El capítulo tres inciso dos denominado ANÁLISIS DE UN ÁRBOL, SOBRE
CHUMACERAS RÍGIDAS, FRACTURADO Y DESBALANCEADO está basado
en el artículo ANÁLISIS Y EXPERIMENTOS DE VIBRACIÓN PARA
CARACTERIZAR/DETECTAR EJES FRACTURADOS, presentado en el GRAN
CONGRESO DE INGENIERÍA MECÁNICA efectuado en Septiembre de 2002
en Monterrey Nuevo León, organizado por la Sociedad Mexicana de Ingeniería
Mecánica, por la Asociación Mexicana de Ingenieros Mecánicos y Electricistas,
y por la Academia de Ingeniería, así como en el artículo TÉCNICA DE
RESONANCIAS LOCALES PARA DETECTAR FISURAS EN EJES
ROTATORIOS, presentado en el TERCER CONGRESO INTERNACIONAL DE
INGENIERÍA ELECTROMECÁNICA Y DE SISTEMAS efectuado en Noviembre
de 2002 en la Ciudad de México D. F. organizado por la Sección de Estudios
de Posgrado e Investigación de la Escuela Superior de Ingeniería Mecánica y
Eléctrica del Instituto Politécnico Nacional; ambos artículos fueron elaborados
con la guía del Dr. Julio César Gómez Mancilla.
Dr. VALERI R. NOSSOV. Profesor investigador de la SEPI – ESIME-IPN.
Sus clases propiciaron el interés por conocer el desalineamiento, sus efectos y
su posible control a través de la presión del lubricante inyectado a las
chumaceras.
El capítulo tres inciso uno denominado ANÁLISIS DEL DESALINEAMIENTO
ENTRE ÁRBOL Y CHUMACERAS, está basado en el artículo CAMPO DE
PRESIÓN DEL LUBRICANTE EN CHUMACERAS DESALINEADAS DE
MÁQUINAS ROTATORIAS, presentado en el SEXTO CONGRESO NACIONAL
DE INGENIERÍA ELECTROMECÁNICA Y DE SISTEMAS efectuado en
Noviembre de 2001 en la Ciudad de México D. F., organizado por la Sección de
Estudios de Posgrado e Investigación de la Escuela Superior de Ingeniería
Mecánica y Eléctrica del Instituto Politécnico; dicho artículo fue elaborado con
la guía del Dr. Valeri R. Nossov.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________8
Dr. JOSÉ ANGEL ORTEGA HERRERA. Profesor investigador de la SEPI – ESIME-IPN.
Sus enseñanzas propiciaron una mayor comprensión del Método de Elemento
Finito, sus alcances y limitaciones.
Dr. JESÚS FIGUEROA NAZUNO. Profesor investigador del CIC-IPN.
Su apoyo hará posible construir la boquilla, para suministrar lubricante a alta
velocidad.
Ing. MARIO GÓMEZ VILLEDA. Profesor investigador del Departamento de Energía, División de Ciencias
Básicas e Ingeniería, Universidad Autónoma Metropolitana Unidad
Azcapotzalco.
Su apoyo para maquinar piezas con tolerancias reducidas, y para acondicionar
chumaceras usando el procedimiento a la cera perdida, fue importante para
reducir la incertidumbre en las variables medidas y calculadas.
INSTITUTO POLITÉCNICO NACIONAL. Cuna de mi formación académica a nivel licenciatura y doctorado, cuyo lema
LA TÉCNICA AL SERVICIO DE LA PATRIA es guía en mi desempeño
profesional.
UNIVERSIDAD AUTÓNOMA METROPOLITANA. Su Unidad Azcapotzalco me abrió puertas en Mayo de 1980 y me ha apoyado
logística y económicamente para realizar estudios de posgrado. En sus aulas,
laboratorios, y talleres; además de hacer investigación, he formado a nuevas
generaciones de ingenieros, transformadores de los recursos naturales en bien
indiscriminado de la humanidad. Adicional a la docencia y a la investigación,
agradezco la oportunidad recibida para participar en la difusión de la cultura.
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________9
SISTEMA DE TRANSPORTE COLECTIVO. En la Gerencia de Instalaciones Fijas colaboré en aspectos relacionados con la
operación, el servicio, y el mantenimiento. En su Gerencia de Ingeniería y
Desarrollo participe en diferentes proyectos tendientes a optimizar
automatismos y controles, para lograr el servicio rápido, eficiente, y seguro
estipulado en el decreto de creación. Es para mí, el invaluable punto de apoyo,
base para mi formación integral como profesionista y académico. Su apoyo
para realizar mis estudios de maestría será siempre grato recuerdo y motivo de
agradecimiento.
CONSEJO NACIONAL DE CIENCIA Y TECNOLOGÍA. Sin su apoyo económico no habría sido posible realizar mi trabajo doctoral.
PROGRAMA INSTITUCIONAL DE FORMACIÓN DE INVESTIGADORES (PIFI). La beca otorgada permitió vincularme estrechamente con el desarrollo de
proyectos de investigación de alto nivel académico.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________10

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________11
DEDICATORIAS
______________________________________________________________________________________________
A mis padres
CAMILO JIMÉNEZ CHÁVEZ
JOSEFINA RABIELA DE JIMÉNEZ
A mi esposa
FLORINDA MOJICA JIMÉNEZ
A mis hijos
ERIKA, FERNANDO, LILIANA, KARLA

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________12
A mi nieto
FERNANDO ESTRELLO JIMÉNEZ
A mis hermanos
CAMILO, CUAUHTEMOC
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________13
ÍNDICE GENERAL
ÍNDICE DE FIGURAS 17 ÍNDICE DE TABLAS 21 TERMINOLOGÍA 23 RESUMEN 25 ABSTRACT 27 JUSTIFICACIÓN 29 OBJETIVO 31 INTRODUCCIÓN 33 1.- ESTADO DEL ARTE. 37 1.1.- REVISIÓN BIBLIOGRÁFICA. 37
1.2.- PLANTEAMIENTO DEL PROBLEMA. 42
1.3.- SUMARIO DEL CAPÍTULO 1. 43
Referencias del capítulo 1. 44 2.- MARCO TEÓRICO. 51 2.1.- EL ROTOR JEFFCOTT. 51
2.1.1.- El Rotor Jeffcott Sobre Chumaceras Soporte Rígidas. 52 2.1.1.1.- Caso 1: Masa Excéntrica. 52 2.1.1.2.- Caso 2: Rotor con Flecha. 60 2.1.2.- El Rotor Jeffcott Sobre Chumaceras Soporte Flexibles. 63 2.2.- SISTEMA ESTATOR ASIMÉTRICO Y NO LINEAL. 72 2.2.1.- Sistema Lineal Anisotrópico. 73
2.3.- VIBRACIÓN ANGULAR. 78
2.3.1.- Ecuaciones de Movimiento. 78

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________14
2.3.2.- Vibraciones Libres y Momentos Giroscópicos. 81
2.3.3.- Vibraciones Forzadas. 85
2.4.- VIBRACIONES NO LINEALES. 87 2.4.1.- Causas y Expresiones de no Linealidad Elástica. 88
2.4.2.- Ecuaciones de Movimiento Usando Coordenadas Físicas. 96 2.4.3.- Solución por el Método de Balance Armónico. 97
2.5.- VIBRACIONES DE UN ROTOR FRACTURADO. 104 2.5.1.- Características Elásticas. 105
2.5.2.- Varios Tipos de Resonancias Debidas a una Fractura. 108 2.5.3.- Resonancia Armónica. 109
2.6.- VIBRACIONES INDUCIDAS POR EL FLUJO. 114
2.6.1.- Vibraciones Auto – Excitadas. 114
2.6.2.- Ecuación de Reynolds. 118
2.6.3.- Fuerza de la Capa de Lubricante. 122
2.6.3.1.- Aproximación de Chumacera Corta. 123 2.6.3.2.- Aproximación de Chumacera Larga. 126 2.7.- MÉTODO DEL ELEMENTO FINITO. 127 2.7.1.- Problemas en Ingeniería. 127
2.7.2.- Métodos Numéricos. 128
2.7.3.- El método del Elemento Finito. 129
2.7.4.- Pasos Básicos en el Método de Elementos Finitos. 130
2.7.5.- Formulación Directa. 131
2.7.6.- Formulación de Energía Potencial Total Mínima. 148
2.7.7.- Formulación de Residuos Ponderados. 151
2.8.- SUMARIO DEL CAPÍTULO 2. 158
Referencias del capítulo 2. 166

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________15
3.- ANÁLISIS GEOMÉTRICO Y MECÁNICO. 169 3.1.- ANÁLISIS DEL DESALINEAMIENTO ENTRE ÁRBOL Y CHUMACERAS. 169 3.1.1.- Modelo Matemático del Sistema Árbol-Chumaceras, con sus ejes longitudinales desalineados. 170 3.1.2.- Ecuación de Reynolds Para un Sistema Árbol-Chumacera con Ejes Desalineados. 179 3.1.3.- Solución de la Ecuación de Reynolds con Desalineamiento Angular. 181 3.2.- ANÁLISIS DE UN ÁRBOL, SOBRE CHUMACERAS RÍGIDAS, FRACTURADO Y DESBALANCEADO. 186 3.3.- SUMARIO DEL CAPÍTULO 3. 196
Referencias del capítulo 3. 200
4.- INVESTIGACIÓN DOCUMENTAL. 201 4.1.- FUNDAMENTOS TEÓRICOS. 201
4.2.- RESULTADOS. 209
4.3.- SUMARIO DEL CAPÍTULO 4. 210
Referencias del capítulo 4. 211 5.- TRABAJO EXPERIMENTAL. 213 5.1.- METODOLOGÍA. 213 5.2.- DESARROLLO. 213 5.3.- SUMARIO DEL CAPÍTULO 5. 217

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________16
6.- ESTUDIO ANALÍTICO. 219 6.1.- CÁLCULO DEL MOMENTO DE INERCIA. 219 6.2.- CÁLCULO DE LA FLEXIBILIDAD. 226 6.3.- SUMARIO DEL CAPÍTULO 6. 229 7.- VALIDACIÓN. 233 7.1.- COMPARACIÓN DEL DESALINEAMIENTO. 234
7.2.- COMPARACIÓN DE LA FLEXIBILIDAD. 234 7.2.1.- Comparación Documental Experimental. 235 7.2.2.- Comparación Experimental Analítica. 236 7.3.- SUMARIO DEL CAPÍTULO 7. 237 Referencias del capítulo 7. 238 8.- TRABAJO FUTURO. 239 9.- CONCLUSIONES. 241 10.- ANEXOS. 243
10.1.- ESTUDIO METALURGICO DEL ROTOR. 243 10.2.- CONDICIÓN DE CONTACTO. 246

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________17
ÍNDICE DE FIGURAS
Figura 1.- Movimiento forward. 23
Figura 2.- Movimiento backward. 24
Figura 2.1a.- Rotor Jeffcott sobre chumaceras soporte rígidas; la línea a- a -a
es el eje de rotación, el arco a- b -a es el eje elástico del rotor.
Distancia de a a b = s , distancia de b a c = q . 51
Figura 2.1b.- Rotor Jeffcott sobre chumaceras soporte flexibles. 52
Figura 2.2a.- Respuesta al desbalance (excentricidad de masa q ) contra velocidad
de rotación -rotor Jeffcott sobre chumaceras soporte rígidas. 54
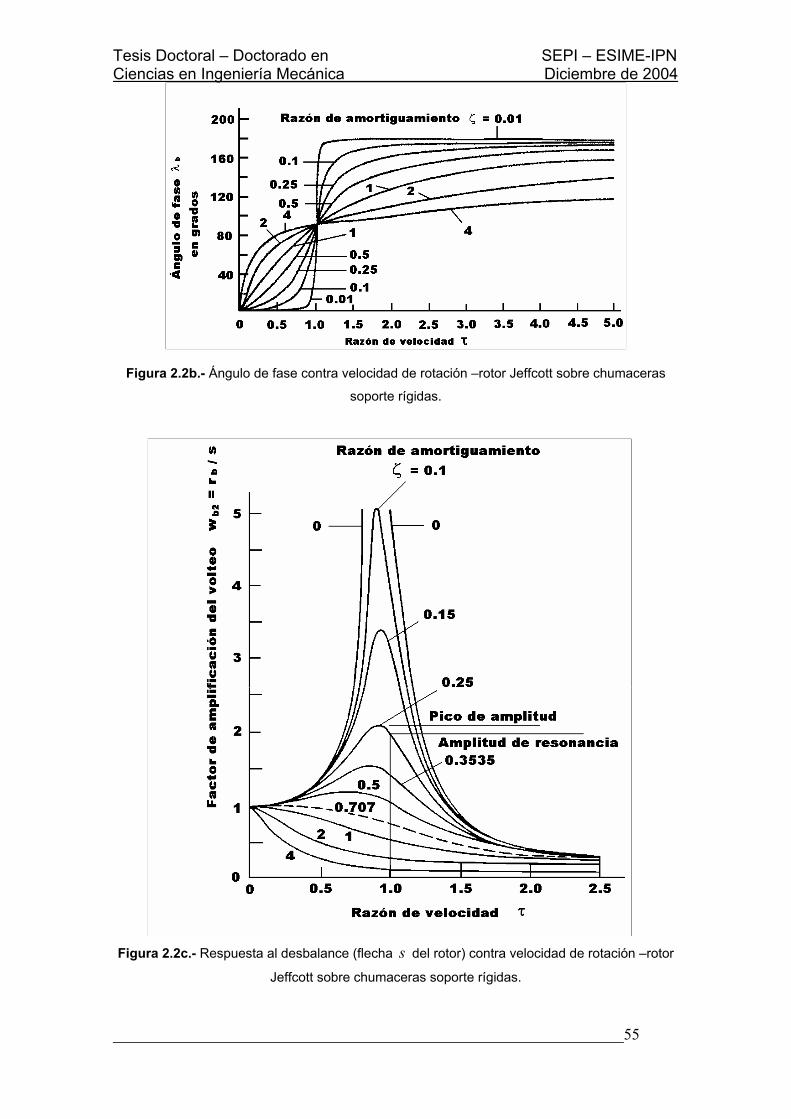
Figura 2.2b.- Ángulo de fase contra velocidad de rotación –rotor Jeffcott
sobre chumaceras soporte rígidas. 55
Figura 2.2c.- Respuesta al desbalance (flecha s del rotor) contra velocidad de
rotación –rotor Jeffcott sobre chumaceras soporte rígidas. 55
Figura 2.3a.- Diagrama vectorial, fuerzas y desplazamientos: rotor Jeffcott
sobre chumaceras soporte rígidas (excentricidad de masa q ). 57
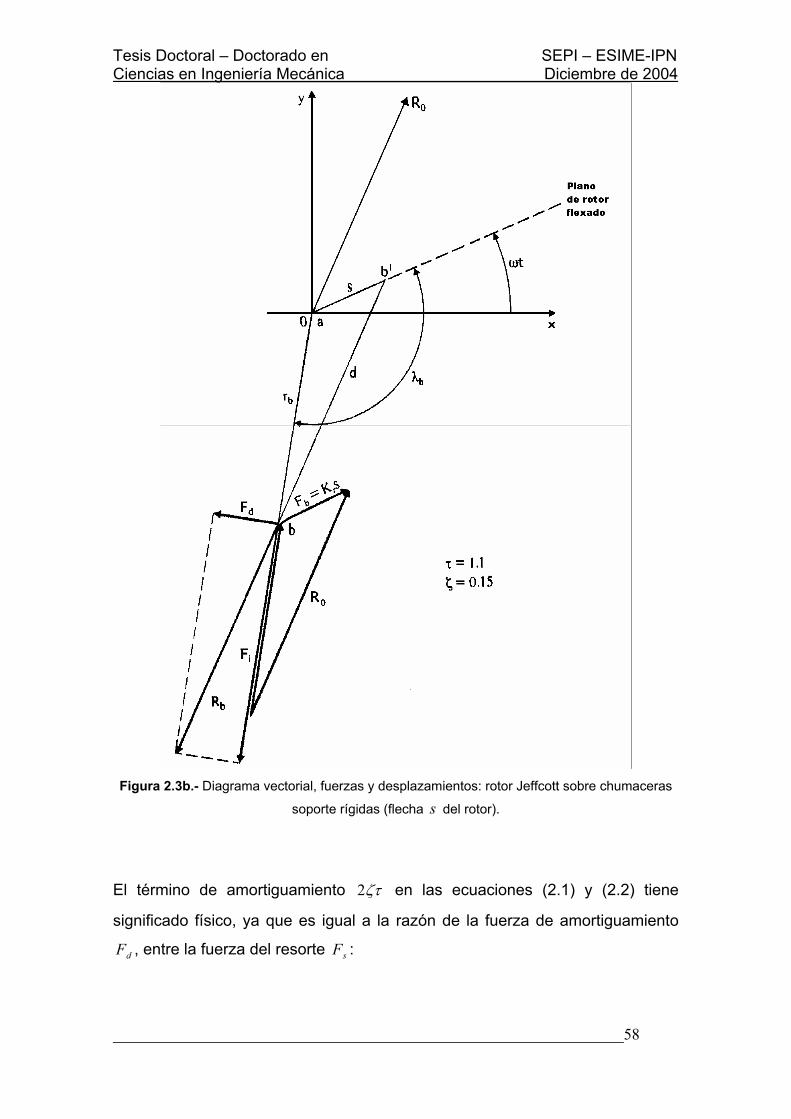
Figura 2.3b.- Diagrama vectorial, fuerzas y desplazamientos: rotor Jeffcott sobre
chumaceras soporte rígidas (flecha s del rotor). 58
Figura 2.4.- Respuesta al desbalance contra velocidad de rotación –rotor Jeffcott
sobre chumaceras soporte flexibles. 66
Figura 2.5.- Diagrama vectorial, desplazamientos y fuerzas –rotor Jeffcott sobre
chumaceras soporte flexibles. 67
Figura 2.6.- Pico de respuesta al desbalance contra razón de amortiguamiento –rotor
Jeffcott sobre chumaceras soporte flexibles. 69
Figura 2.7.- Razón de velocidad en picos de respuesta contra razón de
amortiguamiento –rotor Jeffcott sobre chumaceras soporte flexibles. 71
Figura 2.8.- Tres clases importantes de asimetría y no linealidad en la rigidez
del estator. 74
Figura 2.9.- Respuesta de un sistema lineal y anisotrópico. 75
Figura 2.10.- Ángulo de fase en la respuesta para ejes ortogonales de un
sistema con anisotropía. 77
Figura 2.11.- Rotor con dos grados de libertad para oscilación de inclinación. 79
Figura 2.12.- Vectores: (a) momentum angular (b) momento restaurador. 79
Figura 2.13.- Diagramas de frecuencias naturales (vibración de inclinación):
(a) caso II p > ; (b) caso II p < . 83

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________18
Figura 2.14.- Generación de momentos giroscópicos: (a) volteo forward de →
L ;
(b) dirección del momento giroscópico. 85
Figura 2.15.- Posiciones relativas de los ángulos τ y θ . 87
Figura 2.16.- Claro en chumaceras y características elásticas: (a) sistema rotor;
(b) rodamiento de bolas auto alineado de dos hileras; (c) rodamiento
de bolas de ranura profunda de una hilera. 89
Figura 2.17.- Distribución de energía potencial. 91
Figura 2.18.- Energía potencial del sistema con sólo la componente ( )1ε . 94
Figura 2.19.- Curvas equipotenciales: (a) caso con sólo una componente no lineal
asimétrica; (b) caso con sólo una componente no lineal simétrica. 94
Figura 2.20.- Curvas de resonancia a la velocidad crítica principal: (a) ángulo de
fase; (b) amplitud. 104
Figura 2.21.- Rotor fracturado (deflexión oscilación). 106
Figura 2.22.- Varias resonancias debidas a una fractura ( 1.0=pi , 1.0=τ ):
(a) desbalance localizado en el lado de la fractura; (b) desbalance
localizado en el lado opuesto de la fractura. 108
Figura 2.23.- Comparación de características elásticas. 111
Figura 2.24.- Resultado teórico para un modelo en series de potencias y resultado
numérico para un modelo parcialmente lineal
(desbalance grande, 1.0=τ ). 113
Figura 2.25.- Resultado teórico para un modelo en series de potencias y resultado
numérico para un modelo parcialmente lineal
(desbalance pequeño, 001.0=τ ). 114
Figura 2.26.- Rotor soportado por chumaceras: (a) sistema rotor – chumaceras;
(b) amplitud y frecuencia; (c) diagrama en cascada de un experimento
(c de Muszynska, 1988). 115
Figura 2.27.- Efecto inercial. 117
Figura 2.28.- Deducción de la velocidad whirling. 119
Figura 2.29.- Balance de Fuerzas en fluido: (a) vista agrandada; (b) balance de
fuerzas; (c) velocidades de fluido. 119
Figura 2.30.- Fuerza de la capa de lubricante y ubicación del muñón: (a) distribución
de presión; (b) distribución de presión y fuerza de la capa de lubricante;
(c) orbita de una posición de equilibrio. 122
Figura 2.31.- Condiciones de frontera: (a) condición de Sommerfeld; (b) condición de
Gumbel; (c) condición de Reynolds. 125
Figura 2.32.- Barra de sección variable sometida a carga axial. 131
Figura 2.33.- Subdividiendo la barra en elementos y nodos. 132

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________19
Figura 2.34.- Un elemento sólido de sección transversal uniforme sujeto
a una fuerza F . 133
Figura 2.35.- Diagramas de cuerpo libre de los nodos. 134 Figura 2.36.- Fuerzas transmitidas internamente a través de un elemento arbitrario. 138 Figura 2.37.- Fuerzas internas. 146
Figura 2.38.- Comportamiento elástico de un miembro sometido a una carga central. 148
Figura 3.1.- Árbol-chumacera: (a) ejes longitudinales colineales; (b) Ejes
longitudinales paralelos. 169 Figura 3.2.- Eje del árbol excéntrico con respecto al eje de la
chumacera, y girado alrededor de 1y . 171
Figura 3.3.- Eje del árbol excéntrico con respecto al eje de la chumacera, girado
alrededor de 1y y posteriormente girado alrededor de 2x . 172
Figura 3.4.- Eje del árbol, excéntrico con respecto al eje de la chumacera, girado
alrededor de 1y , y posteriormente girado alrededor
de 2x ; representación unifilar. 173
Figura 3.5.- Eje del árbol, excéntrico con respecto al eje de la chumacera, girado
alrededor de 1y , y posteriormente girado alrededor
de 2x ; representación unifilar; detalles para Z igual a cero
y para Z distinto de cero. 175
Figura 3.6.- Árbol-chumacera-disco; con ejes de árbol (en su posición sin flexar) y
chumacera colineales con el eje Z, y con el eje del disco paralelo al eje Z. 178
Figura 3.7.- Solución clásica de chumaceras cortas de Ocvirk. Aproximación de orden
cero. ( ) 5.00 =ε , βα tan0tan == , 5.0=DL/ , y 1000=l . 184
Figura 3.8.- Campo de presión con un desalineamiento vertical moderado, en
aproximación de orden mayor a uno pero menor de dos. ( ) 5.00 =ε ,
0tan =α , 0005.0tan =β , 5.0=DL/ , y 1000=l . 184
Figura 3.9.- Campo de presión para alto número de Sommerfeld, con
desalineamiento vertical únicamente, usando una aproximación
de orden mayor a uno pero menor de dos. ( ) 1.00 =ε ,
0tan =α , 0005.0tan =β , 5.0=DL/ , y 1000=l . 185
Figura 3.10.- Campo de presión con desalineamientos moderadamente altos.
( ) 1.00 =ε , 0004.0tan =α , 0008.0tan =β , 5.0=DL/ , 1000=l . 185
Figura 3.11.- Relación entre los sistemas de coordenadas. 186
Figura 3.12.- Estabilidad obtenida a partir de la ecuación (3.58c). 191

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________20
Figura 3.13.- Respuesta del sistema en condiciones de inestabilidad. 193
Figura 3.14.- Orbita en condiciones de inestabilidad. 193
Figura 3.15.- Respuesta del sistema en condiciones de estabilidad (árbol sin fractura). 194
Figura 3.16.- Orbita del sistema en condiciones de estabilidad (árbol sin fractura). 194
Figura 3.17.- Respuesta del sistema, con fractura y desbalance, en condiciones de
estabilidad debido a un alto amortiguamiento externo. 195
Figura 3.18.- Orbita del sistema, con fractura y desbalance, en condiciones de
estabilidad debido a un alto amortiguamiento externo. 195
Figura 4.1.- Modelo de sección transversal fracturada, en diferentes
posiciones angulares. 203
Figura 4.2.- Función adimensional de la profundidad de la fractura ( )µf contra la
profundidad adimensional de la fractura µ . 210
Figura 5.1a.- Diagrama físico del árbol fracturado, simplemente apoyado. 214 Figura 5.1b.- Diagrama físico del árbol fracturado, simplemente apoyado-vista frontal. 214
Figura 5.1c.- Detalle del árbol fracturado-vista frontal 215
Figura 6.1.- Características geométricas. 219, 229
Figura 6.2.- Sección transversal generada por la fractura cordal. 221 Figura 6.3.- Secciones transversales componentes. 222
Figura 6.4.- Áreas componentes del sector triangular. 223
Figura 6.5.- Áreas componentes del sector triangular para
2)( /πθ n= con ,......7,5,3,1=n 224
Figura 6.6.- Variación direccional local del momento de inercia. 225
Figura 6.7.- Diagrama unifilar del árbol fracturado simplemente apoyado. 226, 230
Figura 6.8.- Variación direccional de la flexibilidad. 228, 232
Figura 7.1.- Función adimensional de la profundidad de la fractura ( )µf contra la
profundidad adimensional de la fractura µ . 235
Figura A1.- Sección logitudinal completa macro atacada con ácido
clorhídrico 1:1 a 80 grados celsius durante 30 minutos. 244
Figura A2.- Sección logitudinal macro atacada con ácido clorhídrico 1:1 a
80 grados celsius durante media hora. 245
Figura A3.- Sección logitudinal atacada ligeramente con nital 2 % para
observar inclusiones. 245
Figura A4.- Micro Estructura de sección longitudinal a 100X atacada con nital 2 %.
Las manchas obscuras son inclusiones de sulfuros. 245
Figura A5.- Micro estructura de sección logitudinal a 500X, ataque con nital 2 %.
La micro estructura está formada por partículas globulares de
cementita, carburo de hierro (Fe3C) en una matriz de ferrita. 246

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________21
ÍNDICE DE TABLAS
Tabla 2.1.- Propiedades de los elementos en el problema. 142 Tabla 2.2.- Comparación de desplazamientos (in) resultantes por el método de
residuos ponderados. 158
Tabla 5.1.- Pesos medidos. 215
Tabla 5.2.- Deflexiones correspondientes al peso acumulado. 216
Tabla 5.3.- Deflexiones (mm.)correspondientes al peso (Kg.) acumulado. 216
Tabla 5.4.- Flexibilidad en milímetros sobre Kilogramo. 216
Tabla 5.5.- Variación de flexibilidad en milímetros sobre Kilogramo. 217
Tabla 5.6.- Función adimensional de la profundidad de la fractura. 228, 232
Tabla 6.1.- Variación direccional local del momento de inercia. 224
Tabla 6.2.- Variación direccional de la flexibilidad. 228, 232
Tabla 7.1.- Comparación de valores de flexibilidad. 236
Tabla 8.1.- Programación de trabajos futuros. 240

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________22

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________23
TERMINOLOGÍA
Eje.- Lugar geométrico de todos los puntos que equidistan del contorno de
una pieza de sección transversal constante.
Rotor.- Pieza de sección transversal circular, sin masa, que gira alrededor
de su eje.
Árbol.- Pieza de sección transversal circular, con masa, que gira alrededor
de su eje.
Oil whirl.- Volteo del lubricante.
Oil whip.- Movimiento circular de vaivén del lubricante.
Movimiento forward.- Movimiento de volteo, véase Figura 1, de un cuerpo
alrededor de un eje (Z), combinado con un movimiento de rotación, en la
misma dirección y en el mismo sentido, alrededor del propio eje (Z/).
Figura 1.- Movimiento forward.
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________24
Movimiento backward.- Movimiento de volteo, véase Figura 2, de un cuerpo
alrededor de un eje (Z), combinado con un movimiento de rotación, en la
misma dirección y en sentido contrario, alrededor del propio eje (Z/).
Figura 2.- Movimiento backward.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________25
RESUMEN
Esta tesis doctoral es el resultado de una investigación documental, de un
trabajo experimental, y de un estudio analítico. Describe los aspectos
conocidos hoy en día, en relación al comportamiento de la vibración del
sistema rotor-masa-chumaceras, con fractura transversal y al centro del claro
del rotor desbalanceado, y simplemente apoyado en sus extremos. El estudio
analítico se hace considerando comportamiento elástico; cuyos resultados se
comparan con los obtenidos en el trabajo experimental, elastoplástico,
efectuado en la Sección de Estudios de Posgrado e Investigación (SEPI) de la
Escuela Superior de Ingeniería Mecánica y Eléctrica (ESIME) del Instituto
Politécnico Nacional (IPN). Adicionalmente, los resultados anteriores se
comparan con los encontrados (experimentales) en la investigación
documental. Con rigor analítico se deducen relaciones funcionales para la
variación direccional local del momento de inercia en la fractura, en función de
su profundidad y ancho, a partir de las cuales se obtiene la variación
direccional de la flexibilidad del rotor. De la comparación de resultados
analíticos, experimentales, y documentales; se concluye que las expresiones
deducidas, que excluyen el comportamiento plástico, conducen a resultados
razonablemente aceptables, ya que las variaciones además de mínimas son
cualitativamente lógicas, considerando el comportamiento plástico presente en
los resultados experimentales y documentales, así como el comportamiento
geométrico direccionalmente distinto debido a la apertura y cierre de la fractura.
La deducción de las relaciones funcionales, para la variación direccional de la
flexibilidad del rotor, es una aportación de este trabajo al cúmulo de
conocimientos que sobre el tema se tenían hasta hoy. Es importante resaltar
que anteriormente, se había considerado la variación direccional de la
flexibilidad como función sólo de la profundidad de la fractura.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________26

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________27
ABSTRACT
This doctoral thesis is the result of a documentary investigation, an
experimental work, and an analytical study. It describes the known aspects up
today, in relation to the behavior of the vibration of the rotor-mass-bearings
system, with transverse fracture and on the centre of the unbalance, and
support simply rotor. The analytic study it was done paying attention in the
elastic behavior, its results are compared with the elastic and plastic results that
were obtained in the experimental work, that was done in the Research and
Post – grade Studies Section (SEPI in Spanish), of the Electrical and
Mechanical Engineering Superior School (ESIME in Spanish), of the National
Polytechnic Institute (IPN in Spanish). In addition, the before results are
compared with those experimental results founded in the documentary
investigation. With analytical rigor, functional relations are deduced for the local
directional variation of the moment of inertia in the fracture, in function of its
depth and width, in order to this, the directional variation of the flexibility of the
rotor is obtained. Comparing analytics, experimental, and documentary results;
It can be emphasized that the deduce expressions, who exclude the plastic
behavior, conduct to acceptable results, because the variations are minimums
and logical qualitatively, considering the plastic behavior in the experimental
and documentary results, whereas the geometrical behavior distinct
directionally, because of the opening and closing of the fracture. The deduction
of the functional relations, for the directional variation of the rotor/s flexibility, is a
contribution of this work to the pile of knowledge about the topic knows up
today. It is very important to stand out, that before of this work, the directional
variation of the flexibility; it was only considering function of the fracture/s depth.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________28

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________29
JUSTIFICACIÓN
Para incrementar la productividad y hacerla más eficiente debido a razones de
globalización y competencia internacional, las compañías mexicanas han
requerido aumentar el tiempo entre inspecciones y revisiones, favoreciéndose
el aumento de fracturas por fatiga estable. Esta situación incrementa el riesgo
de que ocurran fallas catastróficas en máquinas, lo cual no es un problema
aislado, pero si pocas veces documentado.
El aumento del tiempo entre inspecciones debe estar basado en la historia
clínica de la máquina, dispositivo o instrumento, las revisiones deben implicar el
cambio de partes con cualquier nivel de daño, para reducir las fracturas por
fatiga estable.
En aquellos casos cuya importancia de la operación y o del servicio lo
ameriten, la inspección debe ser un proceso continuo a través del cual se
puedan programar revisiones, que eviten los procesos correctivos propiciando
procesos preventivos y o predictivos.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________30

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________31
OBJETIVO
El objetivo del estudio de la fractura en el rotor del sistema rotor-masa-
chumaceras es detectar, cualificar y cuantificar las particularidades de su
respuesta estática y dinámica.
La fractura se considera transversal y al centro del claro del rotor simplemente
apoyado en sus extremos.
Dada la imposibilidad de eliminar el desbalance, éste se considera presente en
la caracterización dinámica.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________32

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________33
INTRODUCCIÓN
El objetivo del estudio de la fractura en el rotor del sistema rotor-masa-
chumaceras es detectar, cualificar y cuantificar las particularidades de su
respuesta estática y dinámica. La fractura se considera transversal y al centro
del claro del rotor simplemente apoyado en sus extremos. Dada la
imposibilidad de eliminar el desbalance, éste se considera presente en la
caracterización dinámica. Para lograrlo se deduce la variación direccional del
árbol, considerándolo elástico, y se comparan cualitativa y cuantitativamente
los resultados con respecto a los obtenidos de manera experimental y
documental. En este trabajo analítico, experimental, y documental; se hace una
descripción, en el capítulo 1, del estado del arte en relación al comportamiento
de la vibración del sistema rotor-masa-chumaceras. En el capítulo 2 se
describe el comportamiento del rotor Jeffcott, así como el de un sistema estator
lineal anisotrópico. También se hace el análisis de vibraciones: angulares, no
lineales, de un rotor fracturado, e inducidas por el flujo de lubricante. Dada la
aplicación del método, adicionalmente se explican los pasos a seguir, en la
solución de problemas usando el método de los elementos finitos. En el
capítulo 3 se analiza el desalineamiento entre árbol y chumaceras,
caracterizando el campo de presiones generado por el rotor desalineado y
rotando; se incluye el análisis de un árbol, sobre chumaceras rígidas,
fracturado y desbalanceado. En el capítulo 4 se incluyen fundamentos teóricos
experimentales obtenidos de la investigación documental; los que
posteriormente se usan para verificar la reproducibilidad experimental de los
resultados. En el capítulo 5 se deducen relaciones funcionales para la variación
direccional local del momento de inercia; a partir de las cuales se obtiene la
variación direccional de la flexibilidad del árbol. La validación analítica-
experimental-documental se incluye en el capítulo 6, al comparar cualitativa,
física, geométrica, y cuantitativamente los distintos resultados. En los capítulos
7 y 8 se indican los trabajos futuros y las conclusiones, respectivamente.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________34
En el presente trabajo doctoral, para predecir la existencia de una fractura en
un árbol rotando, se hace un análisis del comportamiento dinámico y estático
del mismo, con la finalidad de caracterizar ambos comportamientos y buscar
parámetros cuya variación sea considerable y debida de manera unívoca a la
presencia de la fractura, así como a la profundidad y ancho de la misma.
Para una mayor claridad en la exposición, el término árbol se usa para referirse
a un elemento con masa y volumen, el término rotor se usa para un árbol con
masa concentrada y sin volumen, el término eje se usa para referirse a ejes de
simetría.
Para expertos conocedores del tema de la rotodinámica se recomienda omitir la
lectura de los capítulos 1 y 2, debido a que el primero es una reseña del estado
del arte sobre el tema, y el segundo es una descripción de conceptos
fundamentales.
El capítulo 3 incluye un análisis del desalineamiento entre árbol y chumaceras;
así como el análisis de un árbol, sobre chumaceras rígidas, fracturado y
desbalanceado. Ambos son producto de artículos publicados por el autor con el
Dr. Valeri Nossov y con el Dr. Julio César Gómez Mancilla.
Los capítulos 4 y 5 incluyen fundamentos teóricos y experimentos obtenidos del
artículo de Mayes y Davies de 1984, así como experimentos realizados en el
laboratorio de rotodinámica y vibraciones de la Sección de Estudios de
Posgrado e Investigación de la ESIME.
El capítulo 6 constituye la aportación del presente trabajo doctoral y es original
en tanto que agrega conocimiento al estado del arte sobre el tema. La variación
direccional de la constante de resorte no es presupuesta para determinar su
nivel de acertividad en función de datos experimentales. Por el contrario, es

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________35
obtenida teóricamente considerando comportamiento elástico del árbol y
comparada con datos experimentales, obteniéndose desviaciones lógicas dado
el comportamiento elástico y plástico del árbol.
En el capítulo 7 se hace la comparación de los resultados experimentales
obtenidos en el laboratorio de rotodinámica y vibraciones, contra los obtenidos
por Mayes y Davies. Se hace también la comparación de los resultados
teóricos obtenidos en el capítulo 6 contra los resultados experimentales del
autor y de Mayes y Davies.
Puesto que la investigación es un proceso continuo, en el capítulo 8 se indican
los trabajos futuros del autor.
Las conclusiones al final de la tesis, son producto del análisis comparativo
entre resultados analíticos, experimentales y documentales.
En los anexos 1 y 2 se incluye el estudio metalúrgico del rotor y la condición de
contacto entre las caras de la fractura, respectivamente.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________36

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________37
1.- ESTADO DEL ARTE.
Como antecedente histórico se hace una revisión bibliográfica; y se plantea el
problema a resolver.
1.1.- REVISIÓN BIBLIOGRÁFICA.
Las investigaciones en roto dinámica tienen 135 años de historia, iniciando con
el artículo de Ranking sobre el movimiento de volteo de un rotor en 1869.
Progresaron significativamente a finales del siglo XIX. De Laval inventó una
turbina de vapor y logró su operación. Stodola [1] primero usó un rotor rígido,
después usó un rotor flexible y demostró que éste puede operar a una
velocidad de rotación igual a siete veces la velocidad crítica. Al inicio, el tema
principal para investigadores y diseñadores fue predecir la velocidad crítica,
porque lo que más interesaba a los diseñadores de maquinaria rotatoria era
evitar la resonancia. Dunkerley [2] derivó una formula experimental que daba la
velocidad crítica más baja para un sistema multirotor en 1894. Él fue el primero
en usar el término velocidad crítica para la velocidad rotacional de resonancia.
Holtzer [3] en 1921 propuso un método aproximado para calcular las
frecuencias y formas modales naturales de vibraciones torsionales.
El primer compendio de teoría fundamental de roto dinámica puede ser
encontrado en un artículo escrito por Jeffcott [4] en 1919. Podemos apreciar la
gran contribución de Jeffcott si recordamos que un rotor con un disco al centro
es llamado rotor Jeffcott. Este sistema rotor fundamental simplificado también
es llamado rotor Laval.
Los desarrollos hechos en roto dinámica al iniciar el siglo XX se describen en el
trabajo magistral de Stodola [1]. Este libro explica detalladamente

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________38
todo lo relacionado con el campo de las turbinas de vapor. Además de otros
temas, este libro incluye la dinámica de rotores elásticos con discos, la
dinámica de rotores continuos considerando momento giroscópico, el balanceo
de rotores rígidos, y métodos para determinar valores aproximados de
velocidades críticas de rotores con sección transversal variable.
Posteriormente, se consideró otros efectos. Como la velocidad de rotación por
arriba de la velocidad crítica, la ocurrencia de vibraciones auto-excitadas
implicando serios problemas. En los años veinte (1924), Newkirk [5] y
Kimball[6] reconocieron que la fricción interna de los materiales puede causar
un movimiento de volteo inestable. En 1925 Newkirk y Taylor [7] investigaron
una vibración inestable llamada oil whip, debida a la capa de lubricante en las
chumaceras. Este fenómeno, en el cual la fricción, que ordinariamente
amortigua la vibración, causa vibración auto – excitada, atrajo la atención de
muchos investigadores.
Aproximadamente una década después, inició el estudio de sistemas rotores
asimétricos. Inicialmente sistemas con diferencia direccional en la rigidez del
rotor, y más tarde aquellos con diferencia direccional en la inercia del rotor.
Generadores de dos polos son ejemplo de tales sistemas. Esta diferencia
direccional en el rotor implicó la aparición de términos con coeficientes
constantes en las ecuaciones de movimiento. Estos sistemas son clasificados
como sistemas excitados paramétricamente. La propiedad más característica
de sistemas asimétricos es la aparición de vibraciones inestables en algún
rango de la velocidad de rotación. El artículo de Smith [8] en 1933 es un trabajo
pionero en este tópico. Varios fenómenos relacionados con la asimetría de
rotores fueron investigados activamente a mediados del siglo veinte por Taylor
[9], Foote [10], Brozen y Crandall [11], y Yamamoto y Ota [12, 13, 14].
Fenómenos no estacionarios durante el paso a través de las velocidades
críticas se han estudiado desde que Lewis [15] reportó su investigación sobre
el rotor Jeffcott en 1932. Numerosos reportes sobre este tópico son clasificados

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________39
en dos grupos. (1) fenómenos no estacionarios que ocurren en un proceso con
aceleración constante y (2) aquéllos que ocurren con un torque impulsor
limitado. En el último caso, se debe considerar la interacción mutua entre el
torque impulsor y la vibración del árbol. Como el análisis teórico de tales
problemas transitorios es más difícil que el de las oscilaciones estacionarias,
muchos investigadores adoptaron la integración numérica. El desarrollo del
método asintótico de Mitropol´skii [16] en 1965 estimuló considerablemente la
investigación sobre este tema.
También fueron estudiadas las vibraciones de rotores con masas distribuidas
continuamente. El modelo de rotor continuo más simple, correspondiente a la
viga de Euler fue estudiado primero en el libro de Stodola(1924). En los 50 y
60, Bishop [17]; Bishop y Gradwell [18]; Bishop y Parkinson [19]; reportaron una
serie de artículos sobre la respuesta al desbalance de un rotor continuo.
Eshleman y Eubanks [20] dedujeron ecuaciones de movimiento más generales
considerando los efectos de la inercia de rotación, deformación cortante, y
momento giroscópico, e investigaron dichos efectos.
El más importante y fundamental procedimiento para amortiguar vibraciones
indeseables es eliminar el desbalance geométrico en el rotor. Las técnicas de
balanceo para un rotor rígido fueron establecidas relativamente temprano. Una
máquina de balanceo práctica basada en esta técnica fue inventada en 1909
por Miwa y Shimomura [21]. La aparición de máquinas rotatorias de alta
velocidad hizo necesario desarrollar técnicas de balanceo para rotores
flexibles. Dos teorías representativas fueron propuestas. Una fue el método de
balanceo modal propuesta en los 50 por Federn [22], y por Bishop y Gladwell
[18]. El otro es el método de coeficientes de influencia propuesto a principio de
los 60 y desarrollada principalmente en los E.E.U.U. con el progreso de las
computadoras.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________40
El oil Whip antes mencionado es una vibración representativa de rotores
inducida por el flujo. A mediados del siglo XX, Hori [23] logró explicar varias
características fundamentales del oil whip investigando la estabilidad de
árboles en movimiento y considerando fuerzas de presión debidas a la capa de
lubricante. Casi al mismo tiempo, otro tipo de vibraciones inducidas por el flujo
atrajo la atención de muchos investigadores. Uno de ellos fue una vibración
auto – excitada llamada volteo del vapor. El mecanismo de esta vibración fue
explicado: en turbinas por Thomas [24] en 1958 y en compresores por Alford
[25] en 1965. Estos fenómenos, por su importancia práctica, atraen todavía el
interés de muchos investigadores. La vibración de rotores huecos conteniendo
fluido es un problema relativamente nuevo de flujo induciendo vibraciones. En
1967, Ehrich [26] reportó que el fluido atrapado en árboles de máquinas induce
vibraciones asíncronas y también cambia la forma de las curvas de resonancia.
Un notable artículo sobre este fenómeno es el de Wolf [27], quien logró explicar
la aparición de un rango de velocidad inestable en una región súper crítica de
un sistema rotor conteniendo fluido no viscoso. Actualmente este tipo de
vibraciones auto – excitadas han sido estudiadas por muchos investigadores.
Cuando los rotores giran a altas velocidades, ocurren resonancias no lineales
tales como sub armónicas. Yamamoto [28 y 29] estudió varias clases de
resonancias no lineales reportando sub armónicas debidas a las bolas de los
rodamientos. Discutió sistemas con no linealidad débil que pueden ser
expresados por series de potencias de bajo orden. Además desde las
resonancias sub-armónicas, investigó también resonancias combinadas (las
llamó oscilaciones armónicas sumadas y diferenciales) y combinación de tonos.
En los 60, Tondl [30] estudió resonancias no lineales debidas a la capa de
lubricante en chumaceras. En 1966 Ehrich [31] reportó sub. armónicas
observadas en una turbina de gas. La causa de no linealidades fuertes en
turbinas de gas es el claro radial. Posteriormente, en 1988 y 1991 Ehrich [32 y
33] reportó la ocurrencia de varios tipos de resonancias sub armónicas de muy
alto orden y vibraciones caóticas en máquinas prácticas.
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________41
En el diseño práctico de maquinaria rotatoria, es necesario conocer
exactamente las frecuencias, modos, y respuestas forzadas naturales al
desbalance en sistemas rotores complejos. Las técnicas representativas
usadas para este propósito son el método de matriz de transferencia y el
método del elemento finito. En 1945 Prohl [34] usó el método de matriz de
transferencia en el análisis de un sistema rotor expandiendo el método de
Myklestad [35]. Este método analítico es particularmente útil para sistemas
rotores con muchas chumaceras y se ha desarrollado rápidamente desde los
60 por la contribución de muchos investigadores tales como Lund et al [36 y
37]. El método del elemento finito fue desarrollado primero en dinámica
estructural y luego usado en varios campos tecnológicos. La primera aplicación
del método del elemento finito a un sistema rotor fue hecha por Ruhl y Broker
en 1972 [38]. Luego, en 1976, Nelson y Mc Vaugh [39] lo generalizaron
considerando inercia rotativa, momento giroscópico, y fuerza axial.
En los 60, fueron encontradas fracturas en rotores de algunas turbinas de
vapor. Para prevenir serios accidentes se desarrollaron sistemas detectores de
fracturas, e iniciaron las investigaciones sobre vibraciones de árboles
fracturados. En 1976 Gasch [40], Henry y Okah-Avae [41] investigaron
vibraciones considerando la no linealidad en la rigidez debido a la apertura y
cierre del mecanismo. Ellos demostraron que una región inestable aparece y
desaparece en la velocidad crítica principal, dependiendo de la dirección del
desbalance.
El tópico más reciente en roto dinámica es un estudio de chumaceras
magnéticas, las cuales soportan un rotor sin tocarlo, y con amortiguamiento
activo. Este estudio ha recibido considerable atención desde que Schweitzer
[42] reportó su trabajo en 1975.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________42
1.2.- PLANTEAMIENTO DEL PROBLEMA.
El presente trabajo doctoral tiene como objetivo la detección temprana de
fracturas en árboles rotores flexibles sobre chumaceras soporte rígidas, con
una masa al centro. Para ello se aceptará que un árbol no puede estar
totalmente balanceado. Por otro lado se considerará que no hay vibraciones
debidas a elementos mecánicos tales como pedestales de chumaceras o
coples, ni vibraciones auto –excitadas debido al contacto.
La fractura se considerará transversal y al centro del árbol simplemente
apoyado en sus extremos.
Las variables independientes a usarse para caracterizar el comportamiento
estático y dinámico serán la profundidad y el ancho de la fractura cordal. Todo
parámetro distinto a los anteriores se considerará constante.
Para detectar, cualificar y cuantificar las particularidades del comportamiento,
se hará un análisis teórico de la variación direccional local del momento de
inercia en la sección transversal coincidente con la fractura; a partir de la cual
se obtendrá la variación direccional de la flexibilidad del árbol. Esta última se
usará para calcular la función adimensional de la profundidad de la fractura.
Los resultados anteriores se compararán contra resultados experimentales,
tanto reportados en la bibliografía como contra los obtenidos en el laboratorio
de rotodinámica y vibraciones.
El efecto del desbalance y su orientación se cualificará como agente
incrementador o reductor de la amplitud de la vibración.
La validación se hará en función de los resultados teóricos y experimentales,
separando el comportamiento puramente elástico (teórico) de aquel elástico
plástico (experimental).

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________43
1.3.- SUMARIO DEL CAPÍTULO 1.
Inicialmente el tema principal para investigadores y diseñadores fue predecir la
velocidad crítica, para evitar la resonancia. La presencia de momentos
giroscópicos y la condición de elasticidad se agregó a los rotores con discos.
La velocidad de rotación crítica dejó de ser límite para la velocidad de
operación de la maquinaria rotatoria. Las vibraciones inestables oil whirl y oil
whip debidas a la presión de la capa de lubricante han sido parcialmente
explicadas. Los estudios de sistemas asimétricos con diferencia direccional en
la rigidez y en la inercia del rotor, conocidos como sistemas excitados
paramétricamente, hicieron posible la detección y explicación de vibraciones
inestables en algún rango de la velocidad de rotación. Los fenómenos no
estacionarios durante el paso a través de las velocidades críticas se han
estudiado considerando aceleración constante y variable. El concepto de
masas concentradas fue sustituido por el de masas distribuidas continuamente.
Las vibraciones indeseables son minimizadas al balancear al rotor,
considerándolo rígido o flexible, usando el método de balanceo modal o el de
coeficientes de influencia. Los rotores a alta velocidad presentan resonancias
no lineales tales como sub armónicas, algunas de las cuales se deben a las
bolas de los rodamientos y/o al claro radial.
En el diseño práctico de maquinaria rotatoria, es necesario conocer
exactamente las frecuencias, modos, y respuestas forzadas naturales al
desbalance en sistemas rotores complejos. Las técnicas representativas
usadas para este propósito son el método de matriz de transferencia y el
método del elemento finito. El primer método es particularmente útil para
sistemas rotores con muchas chumaceras. El método del elemento finito fue
desarrollado primero en dinámica estructural y luego usado en varios campos
tecnológicos. La primera aplicación del método del elemento finito a un sistema
rotor fue hecha por Ruhl y Broker en 1972 [38]. Luego, en 1976, Nelson y Mc
Vaugh [39] lo generalizaron considerando inercia rotativa, momento
giroscópico, y fuerza axial.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________44
En los 60, fueron encontradas fracturas en rotores de algunas turbinas de
vapor. Para prevenir serios accidentes se desarrollaron sistemas detectores de
fracturas, e iniciaron las investigaciones sobre vibraciones de árboles
fracturados. En 1976 Gasch [40], Henry y Okah-Avae [41] investigaron
vibraciones considerando la no linealidad en la rigidez debido a la apertura y
cierre del mecanismo. Ellos demostraron que una región inestable aparece y
desaparece en la velocidad crítica principal, dependiendo de la dirección del
desbalance.
El tópico más reciente en roto dinámica es un estudio de chumaceras
magnéticas, las cuales soportan un rotor sin tocarlo, y con amortiguamiento
activo.
La detección temprana y la prevención de fracturas en árboles rotores flexibles
sobre chumaceras soporte rígidas en línea es importante para evitar efectos
catastróficos sobre los recursos humanos y materiales empleados para
producir satisfactores (bienes y/o servicios). Ésta detección es el objetivo del
presente trabajo doctoral.
Referencias del capítulo 1.
[1] Stodola, A. (1924), Dampf- und Gas-Turbine, Verlag von Julius Springer,
Berlin; English translation (1927), Steam and Gas Turbines, Mc Graw-Hill, New
York.
[2] Dunkerley, S., On the whirling and Vibration of Shaft, Philos. Trans. R. Soc.
London, Ser. A, Vol. 185, 1894, pp.279-359.
[3] Holtzer, H., Die Berechnung der Drehschwingungen, Springer-Verlag, Berlin,
1921.
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________45
[4] Jeffcott, H. H., The lateral vibration of loaded shafts in the neighborhood of a
whirling speed: the effect of want of balance, Philos. Mag., Vol. 37, 1919, pp.
304-315.
[5] Newkirk, B. L., Shaft Whipping, Gen Electr. Rev., Vol. 27, No. 3, 1924,
pp.169-178.
[6] Kimball, A. L., Internal Friction theory of shaft whirling, Gen. Electr. Rev.,
Vol. 27, No. 4, 1924, pp.244-251.
[7] Newkirk, B. L., y Taylor, H. D., Shaft whirling due to oil action in journal
bearings, Gen. Electr. Rev., Vol. 28, No. 7, 1925, pp.559-568.
[8] Smith, D. M., The motion of a rotor carried by a flexible shaft in flexible
bearings, Proc. R. Soc. London, Ser. A., Vol. 142, 1933, pp.92-118.
[9] Taylor, H. D., Critical speed behavior of unsymmetrical shafts, J. Appl.
Mech., Vol. 7, No. 2, 1940, pp.71-79.
[10] Foote, W. R., Poritski, H., y Slade, J. J., Jr., Critical speeds so a rotor with
unequal shaft flexibilities, mounted in bearings of unequal flexibility, I, Trans.
ASME, J. Appl. Mech., Vol. 10, No. 2, 1943, pp.77-84.
[11] Brozen, S. H., y Crandall, S. H., Whirling of un symmetrical rotors, Trans.
ASME, J. Appl. Mech., Vol. 28, No. 3, 1961, pp.355-362.
[12] Yamamoto, T., y Ota, H., On the vibrations of a shaft carrying an
unsymmetrical rotating body, Bull. JSME, Vol. 6, No. 21, 1963a, pp.29-36.
[13] Yamamoto, T., y Ota, H., Unstable vibrations of the shaft carrying an
unsymmetrical rotating body, Bull. JSME, Vol. 6, No. 23, 1963b, pp.404-411.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________46
[14] Yamamoto, T., y Ota, H., On the dynamically unstable vibrations of a shaft
carrying an unsymmetrical rotating body, Bull. JSME, Vol. 31, No. 3, 1964,
pp.515-522.
[15] Lewis, F. M., Vibrations during acceleration through a critical speed, Trans.
ASME, Vol. 54, No. 3, 1932, pp.253-261.
[16] Mitropol´skii, Y. A., Problems of the Asymptotic Theory of Non stationary
Vibrations, Israel Program for Science Translations, Jerusalem, 1965.
[17] Bishop, R. E. D., Vibration of rotating shafts, J. Mech. Eng. Sci., Vol. 1, No.
1, 1959, pp.50-65.
[18] Bishop, R. E. D., y Gladwell, G. M. L., The vibration and balancing of an
unbalanced flexible rotor, J. Mech. Eng. Sci., Vol. 1, No. 1, 1959, pp.66-77.
[19] Bishop, R. E. D., y Parkinson, A. G., Second order vibration of flexible
shafts, Philos. Trans. R. Soc. London, Ser. A., Vol. 259, No. 1095, 1965, pp.1-
31.
[20] Eshleman, R. L., y Eubanks, R. A., On the critical speeds a continuous
rotor, Trans. ASME, J. Eng. Ind., Vol. 91, No. 4, 1969, pp.1180-1188.
[21] Miwa, S., y Shimomura, G., Balancing of Rotating Machinery, Corona
Publishing Co., Tokyo, 1976 (en japans).
[22] Federn, K., Grundlagen einer Systematischen schwingungsentst..o rung
Wellenelastis-cher Rotoren, VDI Ber., Bd. 24, 1957, pp.9-25.
[23] Hori, Y., A theory of oil whip, Trans. ASME, J. Appl.Mech., Vol. 26, No. 2,
1959, pp.189-198.
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________47
[24] Thomas, J. J., Instabile Eigenschwingungen von Turbinenlaufern,
Angefacgt durch die Spaltstromungen, in Stopfbuchsen und Beschauflungen,
AEG-Sonderdruck, 1958, pp.1039-1063.
[25] Alford, J. S., Protecting turbo machinery from self-excited rotor whirl, Trans.
ASME, J. Eng. Power, Vol. 87, No. 4, 1965, pp.333-344.
[26] Ehrich, F. F., The influence of trapped fluids on high speed rotor vibration,
Trans. ASME, J. Eng. Ind., Vol. 89.
[27] Wolf, J. A., Whirl dynamics of a rotor partially filled with liquid, Trans.
ASME, J. Appl. Mech., Vol. 35, No. 4, 1968, pp.676-682.
[28] Yamamoto, T., On the critical speed of a shaft of sub-harmonic oscillation,
Trans. JSME, Vol. 21, No. 111, 1955, pp. 853-858 en japones.
[29] Yamamoto, T., On the vibrations of a rotating shaft, Chap. II: Non-linear
and non-symmetrical spring characteristics of the shaft supported by single-row
radial ball bearings; Chap. III: On the critical speed of a shaft of sub-harmonic
oscillation and sub-harmonic oscillation on rectilinear vibrations, Mem. Fac.
Eng. Nagoya Univ., Vol. 9, No. 1, 1957a, pp.25-40.
[30] Tondl, A., Some Problems of Rotor Dynamics, Czechoslovak Academy of
Sciences, Prague, Czechoslovakia, 1965.
[31] Ehrich, F. F., Sub harmonic Vibration of Rotors in Bearing Clearance,
ASME paper 66-MD-1, American Society of Mechanical Engineers, New York,
1966.
[32] Ehrich, F. F., High order sub harmonic response of high speed rotors in
bearing clearance, Trans. ASME, J. Vib. Acoust. Stress Reliab. Des., Vol. 113,
No. 1, 1988, pp. 50-56.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________48
[33] Ehrich, F. F., Handbook of Rotor dynamics, Mc Graw-Hill, 1991, New York.
[34] Prohl, M. A., A general method for calculating critical speeds of flexible
rotors, J. Appl. Mech., Vol. 12, No. 3, 1945, pp.142-148.
[35] Myklestad, N. O., A new method for calculating natural modes of uncoupled
bending vibrations of airplane wings and other types of beams, J. Aeronauti.
Sci., Vol. 11, No. 2, 1944, pp.153-162.
[36] Lund, J. W., y Orcutt, F. K., Calculation and experiments on the unbalance
response of a flexible rotor, Trans. ASME, J. Eng. Ind., Vol. 89, No. 4, 1967,
pp.785-795.
[37] Lund, J. W., Stability and damped critical speed of a flexible rotor in fluid-
film bearings, Trans. ASME, J. Eng. Ind., Vol. 96, No. 2, 1974, pp.509-517.
[38] Ruhl, R. L., y Booker, J. F., A finite element model for distributed parameter
turbo rotor system, Trans. ASME, J. Eng. Ind., Vol. 94, No. 1, 1972, pp.126-
132.
[39] Nelson, H. D., y Mc Vaugh, J. M., The dynamics of rotor bearing systems,
using finite elements, Trans. ASME, J. Eng. Ind., Vol. 98, No. 2, 1976, pp.593-
600.
[40] Gasch, R., Dynamic behavior of a simple rotor with a cross-sectional crack,
Proceeding of the International Conference on Vibrations in Rotating Machinery,
Institute of Mechanical Engineers, New York, 1976, pp.123-128.
[41] Henry, T. A., y Okah-Avae, B. E., Vibrations in cracked shaft, Proceeding of
the International Conference on Vibrations in Rotation Machinery, Institute of
Mechanical Engineers, New York, 1976, pp.15-17.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________49
[42] Schweitzer, G., Stabilization of self-excited rotor vibrations by an active
damper, in Dynamics of Rotors, Springer-Verlag, New York, 1975, pp.472-493.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________50

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________51
2.- MARCO TEÓRICO.
En este capítulo se describen conceptos fundamentales para comprender el
comportamiento dinámico de rotores.
2.1.- EL ROTOR JEFFCOTT1.
Para establecer algunos conceptos y definiciones importantes que proveen
información de utilidad general, es conveniente considerar el rotor Jeffcott, un
modelo muy simplificado de un rotor a alta velocidad que retiene muchas de las
características esenciales de sistemas más complejos en su respuesta al
desbalance. En dicho rotor la masa central está instalada en un elemento
flexible sin masa, soportado sobre dos chumaceras. Se consideran dos
condiciones de las chumaceras soporte: (1) chumaceras soporte rígidas, como
en la Figura 2.1a, y (2) chumaceras soporte flexibles (representadas por un
arreglo axisimétrico de resortes y amortiguadores), como en la Figura 2.1b.
Figura 2.1a.- Rotor Jeffcott sobre chumaceras soporte rígidas; la línea a- a -a es el eje de
rotación, el arco a- b -a es el eje elástico del rotor. Distancia de a a b = s ,
distancia de b a c = q
1 Fredric, F. Ehrich, Handbook of Rotodynamics, KRIEGER PUBLISHING COMPANY, MALABAR, FLORIDA 1997.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________52
Figura 2.1b.- Rotor Jeffcott sobre chumaceras soporte flexibles.
2.1.1.- El Rotor Jeffcott Sobre Chumaceras Soporte Rígidas.
En este modelo se asumen soportes simples infinitamente rígidos para las
chumaceras del rotor. El único amortiguamiento es el derivado del medio fluido
circundando al rotor. Dos tipos de desbalance son considerados
separadamente, como se muestra en la Figura 2.1a: (1) desbalance debido a la
excentricidad de masa q y (2) desbalance debido a la flecha s del rotor.
2.1.1.1.- Caso 1: Masa Excéntrica.- El centro de masa c del disco está
separado del eje elástico del rotor una distancia radial q . El eje elástico
intercepta al disco en el punto b , el cual es llamado centro elástico del disco. El
punto b con rotor parado coincide con el eje de rotación a- a -a (flecha s del
rotor igual a cero). Cuando la velocidad de rotación crece, la fuerza centrífuga
de la masa excéntrica M hace que el punto b se mueva hacia fuera y voltee
alrededor del eje de rotación con un radio de volteo br . Una solución de estado
estable de las ecuaciones diferenciales de movimiento del sistema conduce,
para la respuesta al desbalance [1], a

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________53
( ) ( )222
2
1
21 ζττ
τ
+−==
qr
w bb (2.1)
−
−=
212
arctanτ
ζτλb (2.2)
El factor de amplificación del volteo 1bw (el radio de volteo br normalizado por
la excentricidad de masa q ) y el ángulo de fase bλ (el ángulo de retraso del
vector desplazamiento con respecto al vector desbalance) son funciones de
dos variables adimensionales: (1) la razón de velocidad τ , la cual es igual a la
velocidad de rotación ω dividida entre la velocidad crítica no amortiguada ν
νω
τ = (2.3a)
donde MK r=ν (2.3b)
siendo rK y M la rigidez y masa del rotor, respectivamente, y (2) la razón de
amortiguamiento ζ , la cual es igual al amortiguamiento del sistema rB dividido
entre el amortiguamiento crítico νM2 , que es el valor máximo de
amortiguamiento por arriba del cual un sistema, al que se le aplica una carga
impulsiva, no oscila.
νζ
MBr
2= (2.4)
El factor de amplificación del volteo 1bw y el ángulo de fase bλ están graficados
contra la razón de velocidad τ en las Figuras 2.2a y 2.2b. Para bajos valores
de amortiguamientoζ y operación cercana a la velocidad crítica, el factor de
amplificación del volteo 1bw es muy grande. Con cero

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________54
amortiguamiento se hace infinito a la velocidad crítica ( 1=τ ). El ángulo de fase
es igual a 90 grados a la velocidad crítica –hecho que es útil al balancear el
rotor. A muy alta velocidad, el factor de amplificación del volteo se aproxima a
la unidad y el ángulo de fase se aproxima a 180 grados, lo cual significa que el
centro de masa, punto c , tiende a coincidir con el centro de rotación. Luego, la
operación supercrítica del rotor Jeffcott sobre chumaceras rígidas no posee
otro problema que el de acomodar el pico de amplitud encontrado al paso de la
región de velocidad crítica.
Figura 2.2a.- Respuesta al desbalance (excentricidad de masa q ) contra velocidad de rotación
-rotor Jeffcott sobre chumaceras soporte rígidas.
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________55
Figura 2.2b.- Ángulo de fase contra velocidad de rotación –rotor Jeffcott sobre chumaceras
soporte rígidas.
Figura 2.2c.- Respuesta al desbalance (flecha s del rotor) contra velocidad de rotación –rotor
Jeffcott sobre chumaceras soporte rígidas.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________56
Los valores pico del factor de amplificación del volteo en la Figura 2.2a ocurren
en valores de la razón de velocidad pτ más grandes que la unidad cuando hay
amortiguamiento.
ζτ
21
1
−=p cuando 707.0=
21
<ζ (2.5)
Para 707.0≥ζ , no hay picos y la amplificación del volteo se aproxima a la
unidad, cuando la razón de velocidad se aproxima al infinito.
Un mejor entendimiento de las Figura 2.2a y 2.2b puede lograrse construyendo
un diagrama de fuerzas y desplazamientos para el sistema. En la Figura 2.3a,
los vectores de desplazamiento y fuerza son mostrados para un punto típico en
el diagrama de la Figura 2.2a ( 1.1=τ y 15.0=ζ ). El movimiento del rotor es un
volteo estable alrededor de la línea central de rotación (a- a -a), con los puntos
b (centro elástico) y c (centro de masa) describiendo orbitas circulares. La
fuerza centrífuga resultante es la suma de vectores de la fuerza inercial iF y la
fuerza de desbalance uF . Es igual y opuesta a la fuerza de restricción
resultante, la cual es el vector suma de la fuerza de resorte radial sF y la fuerza
de amortiguamiento tangencial dF .
qMFu2ω= (2.6)
bi rMF 2ω= (2.7)
brs rKF = (2.8)
brd rBF ω= (2.9)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________57
Las dos fuerzas resultantes están separadas una de la otra y este torque
negativo es balanceado por el torque impulsor sobre el rotor.
Figura 2.3a.- Diagrama vectorial, fuerzas y desplazamientos: rotor Jeffcott sobre chumaceras
soporte rígidas (excentricidad de masa q ).
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________58
Figura 2.3b.- Diagrama vectorial, fuerzas y desplazamientos: rotor Jeffcott sobre chumaceras
soporte rígidas (flecha s del rotor).
El término de amortiguamiento ζτ2 en las ecuaciones (2.1) y (2.2) tiene
significado físico, ya que es igual a la razón de la fuerza de amortiguamiento
dF , entre la fuerza del resorte sF :

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________59
s
d
r
r
FF
KB
==2ω
ζτ (2.10a)
La reacción de las chumaceras sobre el rotor es la fuerza de restricción 0R ,
como se muestra en la Figura 2.3a:
( ) ( )220 += ds FFR (2.10b)
Un factor adimensional de reacción de las chumaceras se deriva desde la
ecuación (2.10a) después de sustituir sF y dF con las ecuaciones (2.8) y
(2.9):
( )21
0 21 ζτ+= br
wqK
R (2.10c)
Para el sistema no amortiguado ( 0=ζ ), el factor de reacción de las
chumaceras es igual al factor de amplificación del volteo 1bw . A velocidades
muy altas ( 1>>τ ), donde el centro de masa c coincide con el eje de rotación a-
a -a y el centro elástico b voltea con un radio q , la fuerza de reacción 0R se
hace igual a qK r . Ésta es la fuerza de resorte requerida para flexionar el eje
elástico una cantidad q .
El efecto del término de amortiguamiento en la ecuación (2.10b) es incrementar
el factor de reacción de las chumaceras, el porcentaje de cambio crece con el
incremento de velocidad. A muy alta velocidad ( 1>>τ ), el factor de reacción de
las chumaceras se aproxima a un valor infinito.
Es interesante examinar la naturaleza de la velocidad crítica más
detalladamente. Para el caso hipotético en el cual el rotor no tiene desbalance

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________60
( 0=q ) y no tiene amortiguamiento ( 0=ζ ), el balance entre la fuerza de inercia
y la fuerza de resorte es dada por
brb rKrM =2ω (2.11)
A la velocidad crítica, MK r /=ω , este balance de fuerzas es satisfecho para
todos los valores del radio de volteo br . En otras palabras, existe un estado de
equilibrio indefinido –el cual, por supuesto, es establecido en cualquier
situación real aún con cantidades ligeras de desbalance y amortiguamiento. La
velocidad crítica de un rotor puede estar definida por lo tanto como la velocidad
a la cual las fuerzas de inercia y las fuerzas de restitución elástica están en
perfecto balance para un sistema no amortiguado.
2.1.1.2.- Caso 2: Rotor con Flecha.- En este caso el centro de masa c se
asume coincidente con el centro elástico b ( 0=q ). El rotor estaría en perfecto
balance excepto por una flecha permanente en el eje elástico la cual sería
debida a daño físico o distorsión térmica durante la operación o a tolerancias
de manufactura. Luego, en paro, el centro elástico b estaría desplazado del eje
de rotación a- a -a por una distancia radial s , flecha en el rotor sin masa, como
se muestra en la Figura 2.1a. Con el incremento de velocidad desde el paro, el
punto b se mueve alejándose de su posición inicial /b bajo la influencia de la
fuerza centrífuga y voltea alrededor del eje de rotación con un radio de volteo
br . Una solución de estado estable de las ecuaciones diferenciales de
movimiento conducen a un factor de amplificación de volteo 2bw .
( ) ( )2222
21
1
ζττ +−==
sr
w bb (2.12a)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________61
El ángulo de fase bλ está dado por la ecuación (2.2) como en el caso 1. El
factor de amplificación del volteo 2bw (el radio de volteo br normalizado por la
flecha s del rotor) es una función de la razón de velocidad τ y la razón de
amortiguamiento ζ (como en el caso 1) y está graficado en la Figura 2.2c. Una
comparación de la Figura 2.2c para el caso 2 con la Figura 2.2a para el caso 1
sugiere que:
Cuando la razón de velocidad τ se aproxima a cero, el factor de amplificación
del volteo bw tiende a cero para el caso 1 y a la unidad para el caso 2. Para
velocidades de rotación muy altas ( 1>>τ ) lo inverso es válido; es decir, el
factor de amplificación del volteo se aproxima a la unidad para el caso 1 y a
cero para el caso 2.
A la velocidad crítica no amortiguada ( 1=τ ), se obtienen valores idénticos del
factor de amplificación del volteo para los dos casos.
En la Figura 2.3b, un diagrama de fuerzas y desplazamientos se ha graficado
para un punto típico en la gráfica de la Figura 2.2c ( 1.1=τ y 15.0=ζ ). Alguna
percepción adicional en la naturaleza de la solución para el rotor flexado puede
lograrse desde el diagrama. Una solución trigonométrica para el
desplazamiento elástico d del centro elástico (desde /b en paro a b a una
razón de velocidad τ ) la cual hace uso de la ecuación (2.12a) para el radio de
volteo br y de la ecuación (2.2) para el ángulo de fase bλ conduce a
( )24 2+= ζττbrd (2.12b)
La fuerza resultante bR en el centro elástico b es el vector suma de la fuerza
de inercia iF dada por la ecuación (2.7) y la fuerza de amortiguamiento dF
dada por la ecuación (2.9):

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________62
( ) ( ) ( )2422 2+=+= ζττbrdib rKFFR (2.12c)
Una comparación de las ecuaciones (2.12b) y (2.12c) muestra que la fuerza
resultante bR es proporcional al desplazamiento elástico resultante d , con un
factor de proporcionalidad igual a la rigidez del rotor rK . El vector fuerza
resultante y el vector desplazamiento resultante son colineales, como se
muestra en la Figura 2.3b.
La fuerza de reacción de las chumaceras 0R ejercida sobre el rotor es igual y
opuesta a la fuerza resultante bR actuando en el centro elástico. El momento
debido a la separación de estas fuerzas es balanceado por el torque impulsor.
El factor adimensional de reacción de las chumaceras desde las ecuaciones
(2.12c), (2.12a), y (2.1) es entonces
2
1
22
20 2
12
1
+=
+=
τζ
τζ
τ bbr
wwsK
R (2.12d)
El factor de reacción de las chumaceras del caso 2 para el sistema no
amortiguado ( 0=ζ ) es igual al factor de amplificación del volteo 1bw , como
para el caso 1.
El efecto del término de amortiguamiento en la ecuación (2.12d) es incrementar
el factor de reacción de las chumaceras. Con amortiguamiento, los factores de
reacción de las chumaceras para los casos 1 y 2 son idénticos en sólo dos
razones de velocidad, 0=τ y 1=τ (la velocidad crítica no amortiguada). A
valores muy grandes de la razón de velocidad ( 1>>τ ), el centro elástico b
para el caso 2 se mueve hacia el eje de rotación a- a -a. Luego en este límite de
la razón de velocidad la fuerza de reacción 0R es simplemente igual a la fuerza
de resorte sK r que es requerida para enderezar completamente el rotor
flexado.
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________63
2.1.2.- El Rotor Jeffcott Sobre Chumaceras Soporte Flexibles.
En este modelo, tanto el rotor como las chumaceras se tratan como elementos
flexibles. El único amortiguamiento en el sistema es aquel asociado con las
chumaceras soporte. El amortiguamiento debido al fluido circundando al rotor
es considerado despreciable, como es generalmente el caso para cualquier
sistema práctico de alta velocidad.
Primero se derivará ciertos cálculos básicos desde un caso especial del
sistema mostrado en la Figura 2.1b, donde se asume infinitamente rígido al
rotor ( ∞=rK ). Este caso especial es matemáticamente idéntico al sistema de
la Figura 2.1a (el rotor flexible sobre chumaceras soporte rígidas). La velocidad
crítica no amortiguada µ es ahora dada por
MK s=µ (2.13)
donde sK es la rigidez de las chumaceras y M es la masa del rotor.
La nueva razón de velocidad σ es igual a la velocidad de rotación ω dividida
entre la velocidad crítica no amortiguada µ
µω
σ = (2.14)
y la nueva razón de amortiguamiento η es igual al amortiguamiento de las
chumaceras sB dividido entre el amortiguamiento crítico µM2
µη
MBs
2= (2.15)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________64
Si σ es sustituido por τ y si η es sustituido por ζ , entonces las Figura 2.1a y
2.1b y las ecuaciones (2.1), (2.2), y (2.5), aplicadas a un rotor flexibles sobre
chumaceras soporte rígidas, pueden usarse para representar la respuesta al
desbalance del rotor rígido sobre chumaceras soporte flexibles.
Una solución de estado estable de las ecuaciones diferenciales de movimiento
para el sistema completo de la Figura 2.1b (rotor flexible y chumaceras
flexibles) conduce para la respuesta al desbalance a
( ) ( )223
21
2
+==
cccqr
w aa
σ (2.16)
−=
1
23arctanc
ccaλ (2.17)
( ) ( )23
2 ++1== kckwqr
w ab
b (2.18)
( ) ( )
++
−=
22
31
3
1arctan
kccck
cbλ (2.19)
donde ( ) 21 11 σkc +−= kc 2
2 1 σ−= ση23 =c
El factor de amplificación del volteo aw es igual al radio de volteo ar en la
localización de las chumaceras, normalizado por la excentricidad de masa q .
El ángulo de fase aλ es el ángulo relativo entre el vector desplazamiento ar y
el vector desbalance q . El factor de amplificación del volteo bw es igual al radio
de volteo br normalizado por la excentricidad de masa q . El ángulo de fase bλ
es el ángulo relativo entre el vector desplazamiento br y el vector desbalance

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________65
q . La razón de rigidez es igual a la rigidez de las chumaceras sK dividida entre
la rigidez del rotor rK :
r
s
KK
k = (2.20)
La razón k puede ser también considerada como razón de flexibilidad, definida
por la razón de la deflexión estática rδ en el rotor a la deflexión estática sδ en
las chumaceras, producida por el peso del rotor:
s
rkδδ
= (2.21a)
donde
rr K
W=δ (2.21b)
ss K
W=δ (2.21c)
=W Peso del rotor
No es posible representar la respuesta al desbalance dada por las ecuaciones
de la (2.16) a la (2.19) como un simple conjunto de gráficas, como en las
Figuras 2.2a y 2.2b. Por lo tanto, en la Figura 2.4 se presenta una gráfica
representativa de los factores de amplificación ( aw y bw ) y los ángulos de fase
( aλ y bλ ) como funciones de la razón de velocidad, para una simple
combinación de la razón de rigidez y de la razón de amortiguamiento ( 2=k y
1=η ). De particular interés en la Figura 2.4 son los valores pico de los factores
de amplificación del volteo para las chumaceras y para la masa en el rotor

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________66
( 26.1=bw y 01.5=aw ), los ángulos de fase correspondientes ( 0102−=bλ y
0143−=aλ y), y la razón de velocidad a la cual ocurren estos valores
( 65.0=pσ ). La velocidad a la cual se producen los picos de amplitud de volteo
es comúnmente referida como la velocidad crítica, amortiguada, o real.
Figura 2.4.- Respuesta al desbalance contra velocidad de rotación –rotor Jeffcott sobre
chumaceras soporte flexibles.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________67
Figura 2.5.- Diagrama vectorial, desplazamientos y fuerzas –rotor Jeffcott sobre chumaceras
soporte flexibles.
El diseñador usa frecuentemente a la velocidad crítica ν como su punto de
referencia. En la Figura 2.4, una escala para la razón de velocidad τ es

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________68
incluida en adición a la escala para la razón de velocidad σ . La relación entre
estas dos razones de velocidad está dada por
kστ = (2.22)
En la Figura 2.5 es desplegado un diagrama vectorial para las fuerzas y
desplazamientos en el sistema de la Figura 2.4 a la velocidad crítica
amortiguada ( 65.0=pσ ). Como en el sistema simple de la Figura 2.3 (el rotor
sobre chumaceras rígidas) el movimiento de este rotor a cualquier velocidad
dada es un volteo estable alrededor de la línea central de rotación (a- a -a). Los
puntos a , b , y c voltean en orbitas circulares con una relación espacial fija
entre ellos. La fuerza de resorte de las chumaceras sF y la fuerza de
amortiguamiento de las chumaceras dF actúan sobre a mientras que la fuerza
de inercia iF y la fuerza de desbalance uF están aplicadas sobre c . La fuerza
resultante de chumaceras y la fuerza centrífuga resultante son de igual
magnitud, paralelas, y opuestas; el torque debido a la separación entre ellas
( qR0 ) y el torque debido a la fuerza de amortiguamiento de las chumaceras
( ad rF ) están balanceados por el torque impulsor sobre el rotor.
Las fuerzas centrífugas uF y iF están definidas por las ecuaciones (2.6) y
(2.7), mientras las fuerzas de las chumaceras son ahora dadas por
ass rKF = (2.23)
asd rBF ω= (2.24)
también σηω
2==s
s
s
d
KB
FF
(2.25)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________69
De particular importancia para el diseñador es el pico de la respuesta al
desbalance del rotor sobre el rango de velocidad completo y el valor de la
velocidad a la cual ocurren. En la Figura 2.6 el valor pico del factor de
amplificación del volteo ( ) paw ha sido graficado como una función de la razón
de amortiguamiento η para una serie de valores constantes de la razón de
rigidez k .
Figura 2.6.- Pico de respuesta al desbalance contra razón de amortiguamiento –rotor Jeffcott
sobre chumaceras soporte flexibles.
Dos importantes conceptos son derivados desde esta gráfica: (1) Para
cualquier valor constante de la razón de amortiguamiento η , hay un dramático

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________70
aumento en el factor de amplificación del volteo ( ) paw con un incremento de la
razón de rigidez k . (2) Para cualquier valor asignado de la razón de rigidez, un
valor mínimo del factor de amplificación del volteo ocurre en algún nivel
intermedio de la razón de amortiguamiento. Cuando la razón de
amortiguamiento tiende a cero, el factor de amplificación del volteo para todos
los valores de la razón de rigidez se hace infinito debido a la ausencia de algún
sistema amortiguador. También cuando la razón de amortiguamiento tiende al
infinito, el factor de amplificación del volteo para todos los valores de la razón
de rigidez nuevamente se hace infinito debido a la rigidez de las chumaceras
soporte y la consiguiente pérdida de acción amortiguante. En la Figura 2.6 el
valor óptimo de la razón de amortiguamiento para mínima respuesta al
desbalance varía desde 0.707 para 0=k a 2.14 para 16=k .
En conjunción con la Figura 2.6 el valor de la razón de velocidad pσ a la cual el
valor pico del factor de amplificación del volteo ocurre ha sido graficado en la
Figura 2.7 contra la razón de amortiguamiento η para valores constantes de la
razón de rigidez k . Cuando la razón de amortiguamiento se aproxima a cero, la
razón de velocidad pσ tiene un límite de
kp +11
=σ (2.26)
el cual es la velocidad crítica no amortiguada. Cuando la razón de
amortiguamiento se aproxima al infinito, el valor límite para la razón de
velocidad pσ es
kp
1=σ (2.27)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________71
Figura 2.7.- Razón de velocidad en picos de respuesta contra razón de amortiguamiento –rotor
Jeffcott sobre chumaceras soporte flexibles.
Si se desea hacer referencia a la velocidad crítica no amortiguada ν para
chumaceras rígidas, entonces, en virtud de la ecuación (2.22), el valor límite
para la razón de velocidad pτ cambia a
kk
p +1=τ cuando 0→η (2.28)
1=pτ cuando ∞→η (2.29)
Las curvas para el valor cero de la razón de rigidez k en las Figuras 2.6 y 2.7
son derivadas desde el caso especial de rotor rígido sobre chumaceras
soportes flexibles. Con un incremento de la razón de amortiguamiento, el valor
pico del factor de amplificación del volteo disminuye a la unidad en 707.0=η ,

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________72
mientras la razón de velocidad pσ se incrementa desde la unidad a un valor
infinito en 707.0=η y se mantiene en infinito para valores de η mayores de
0.707.
El valor cero para la razón de rigidez resulta de fijar ∞=rK (rotor rígido). Un
valor cero para sK , el cual también haría cero la razón de rigidez, no es
admisible para las formulaciones matemáticas simplificadas con las cuales
estamos tratando, puesto que µ se haría igual a cero y los parámetros de
diseño σ y η se harían infinitos.
2.2.- SISTEMA ESTATOR ASIMÉTRICO Y NO LINEAL2.
En el análisis de las vibraciones forzadas para el diseño de maquinaria rotatoria
normalmente se asume simetría axial y linealidad en
• Las rigideces del sistema rotor y estator; la fuerza de reacción es
simplemente proporcional a la deflexión e independiente de la
orientación angular.
• Los amortiguamientos de rotor y estator; la fuerza de reacción es
simplemente proporcional a la velocidad e independiente de la
orientación angular.
• Los momentos de inercia principales del rotor.
Ciertas desviaciones de estas premisas pueden jugar un papel significativo
causando vibración auto excitada (es decir, asimetría en la rigidez o momento
de inercia del rotor causando inestabilidad paramétrica) o modificando el
comportamiento de vibración autoexitada (es decir, incrementando rigidez y
amortiguamiento en grandes amplitudes, limitando la amplitud de volteo de 2 Fredric, F. Ehrich, Handbook of Rotodynamics, KRIEGER PUBLISHING COMPANY, MALABAR, FLORIDA 1997.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________73
sistemas inestables; las rigideces anisotrópicas del estator afectando la
velocidad de establecimiento de ciertos tipos de volteo).
Asimetrías y no linealidades pueden también tener un profundo efecto sobre el
comportamiento de la vibración forzada de maquinaria rotatoria, causando
significativos ajustes en la amplitud y velocidad o frecuencia de picos de
amplitud a velocidad crítica. Ésto genera la aparición de picos de vibración a
velocidades seudo críticas, marcadamente diferentes de aquellas anticipadas
desde análisis lineal y de aquellas otras frecuencias sincronas (una por
revolución).
La Figura 2.8 muestra tres de las clases importantes de asimetría y no
linealidad en la rigidez del estator, comparándolas al caso axisimétrico lineal,
en términos de la relación fuerza – deflexión para los dos ejes de rigidez
principales del estator. Todas son comparadas a un sistema isotrópico
(axisimétrico) lineal donde ambos ejes tienen rigidez del estator lineal e igual.
1. Sistema lineal anisotrópico.- Ambos ejes del estator tienen rigidez lineal,
pero un eje es más rígido que el otro.
2. Sistema isotrópico (axisimétrico) no lineal.- Ambos ejes del estator
tienen la misma rigidez, pero es no lineal.
3. Sistema con asimetría plana.- Un eje del estator tiene una rigidez
asimétrica (fácil movimiento en un sentido y difícil movimiento en el otro
sentido). El otro eje tiene una rigidez lineal. 2.2.1.- Sistema Lineal Anisotrópico.
Un sistema tal se muestra en la Figura 2.8. Típicamente un estator montado
sobre un pedestal rígido tendrá una mayor rigidez en la dirección vertical que
en la dirección horizontal.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________74
Figura 2.8.- Tres clases importantes de asimetría y no linealidad en la rigidez del estator.
Esta diferencia de rigidez implica cambios en la respuesta vibratoria forzada del
sistema desbalanceado, como se muestra en forma general en la Figura 2.9
para el rotor Jeffcott. Puede demostrarse matemáticamente que las respuestas
de estado estable horizontal y vertical a cualquier velocidad de rotación son
esencialmente independientes la una de la otra. Como con cualquier sistema
lineal, la frecuencia de ambas respuestas vibratorias estará en sincronía con la
velocidad de rotación (es decir, uno por revolución). Pero la velocidad crítica
correspondiente al pico de amplitud será mayor para el eje del estator con

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________75
mayor rigidez, mostrado en la Figura 2.9 como el eje vertical. Como
consecuencia de las diferentes amplitudes de vibración horizontal y vertical a
cualquier velocidad de rotación, la orbita de deflexión del rotor no será circular
–elongada en la dirección horizontal cuando pasa a través de la velocidad
crítica horizontal y elongada en la dirección vertical cuando pasa a través de la
velocidad crítica vertical.
Figura 2.9.- Respuesta de un sistema lineal y anisotrópico.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________76
La desviación desde una orbita circular tiene una consecuencia de posible
significado. Cuando un rotor voltea en una orbita circular sincronizadamente
con la velocidad de rotación y en el mismo sentido que la rotación, se mueve
como un cuerpo con deflexión congelada en el marco de coordenadas del rotor.
Esto significa que los esfuerzos elásticos internos en el rotor son constantes, es
decir, las fibras del rotor no experimentan esfuerzos vibratorios y por lo tanto no
están sujetos a fatiga como consecuencia de la vibración forzada debida al
desbalance. Sin embargo, un rotor voltea con una orbita elíptica, sufrirá dos
deflexiones máximas y dos deflexiones mínimas en cada revolución, y por lo
tanto las fibras del rotor experimentarán esfuerzos de vibración a una
frecuencia doble de la velocidad de rotación. Debe tenerse mucho cuidado para
que estos esfuerzos vibratorios estén muy por abajo del límite de fatiga del
material del rotor.
Hay una segunda posible consecuencia de la anisotropía. Para el rotor Jeffcott,
el ángulo de fase de la respuesta con respecto al desbalance varía como una
función de la velocidad de rotación. A velocidades subcríticas bajas, las
deflexiones vibratorias están en fase una con otra. A la velocidad crítica, la
deflexión y el desbalance estarán defasadas 90 grados. A velocidades
supercríticas altas la deflexión y el desbalance estarán defasadas 180 grados.
Mientras las velocidades críticas vertical y horizontal sean idénticas, el cambio
de fase será idéntico a cualquier velocidad. Pero con anisotropía en el estator,
las velocidades críticas y, por lo tanto, el cambio de fase para los dos ejes
diferirán a cualquier velocidad de rotación, y de manera particular en el rango
de velocidades entre las dos velocidades críticas (ver Figura 2.10). Si la
diferencia entre los ángulos de fase de las vibraciones en los dos ejes a
cualquier velocidad de rotación es baja, el efecto es que los ejes mayor y
menor de la orbita se inclinen alejándose de los ejes elásticos principales del
estator. Si la diferencia entre los ángulos de fase es igual a 90 grados,
entonces la orbita es un movimiento elíptico degenerado. Si la diferencia entre
los ángulos de fase es mayor de 90 grados, el movimiento de volteo es en una

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________77
dirección opuesta al de rotación del rotor (es decir, el movimiento es backward),
como se indica en la orbita central mostrada en la Figura 2.9. Esto no tiene
mayores consecuencias prácticas, pero en el diseño es razonable asegurarse
que la vibración forzada debida al desbalance implique siempre movimiento de
volteo en una dirección igual al de rotación del rotor (es decir, movimiento
forward).
También se ha demostrado que la anisotropía en la rigidez del estator puede
aumentar sustancialmente la estabilidad del volteo de rotores.
Figura 2.10.- Ángulo de fase en la respuesta para ejes ortogonales de un sistema con
anisotropía.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________78
2.3.- VIBRACIÓN ANGULAR3.
Se analizará la vibración angular de un rotor elástico con un disco en su centro.
2.3.1.- Ecuaciones de Movimiento.
Considere una vibración angular de un disco instalado en el centro de un rotor
flexible. Este sistema de dos grados de libertad es el sistema rotor más simple
que tiene un efecto giroscópico. Se establecerán las ecuaciones de movimiento
para la vibración angular suponiendo ángulo de inclinación pequeño del disco.
La Figura 2.11 muestra un sistema rotor y el sistema de coordenadas xyzO − .
El rotor tiene un desbalance dinámico τ . Suponiendo que el rotor sólo se
inclina sin deflexión lateral y que el centro geométrico M del disco siempre
está sobre la línea de centros de las chumaceras. El ángulo de inclinación del
rotor en la posición del disco es denotada por θ y la línea de centros OA del
disco se inclina desde la dirección tangencial OB un ángulo τ . Estos dos
ángulos θ y τ no son generalmente en el mismo sentido. El ángulo de
inclinación de la línea OA, la cual coincide con el eje principal del momento
polar de inercia del disco, pI , es denotado por 1θ . Las proyecciones del ángulo
θ sobre los planos xz y yz son denotadas por xθ y yθ , y las de 1θ son
denotadas por x1θ y y1θ , respectivamente. Si el ángulo θ es pequeño
( ) ϕθθ cos≅x (2.30a)
( ) ϕθθ seny ≅ (2.30b)
3 Toshio Yamamoto, y Yukio Ishida, Linear and Nonlinear Rotordynamics, Edit. Wiley, U.S.A. 2001.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________79
donde ϕ es el ángulo entre la línea OB y el plano xz .
Figura 2.11.- Rotor con dos grados de libertad para oscilación de inclinación.
En el establecimiento de las ecuaciones de movimiento, el uso de los ángulos
Eulerianos es el más conveniente. Sin embargo, aquí usamos un procedimiento
más adecuado para describir el significado físico de cada cantidad.
Figura 2.12.- Vectores: (a) momentum angular (b) momento restaurador.
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________80
Introduciendo la representación vectorial, usando tornillo con cuerda a derecha,
la dirección y sentido de los vectores son como se indica en las Figuras 2.11 y
2.12.
Los vectores que representan el momentum angular correspondiente a la
Figura 2.11, son mostrados en la Figura 2.12a. Sean I e pI el momento de
inercia diametral y el momento polar diametral de inercia, respectivamente.
Cuando un rotor inclinado no está girando, xI 1
.θ es en el sentido positivo del
eje y e yI 1
.θ es en el sentido negativo del eje x . Si este disco está girando
alrededor del eje OA con la velocidad angular ω , ωpI es agregado en el
sentido OA. Para establecer las ecuaciones de movimiento, debemos obtener
primero los decrementos por unidad de tiempo de estos vectores. Suponga que
el vector ( )yx 111 ,θθθ→
cambia ( )yxd 111 ,θθθ→
en un tiempo pequeño dt .
Entonces aparecen las diferencias mostradas en la Figura 2.12a.
Concretamente, un incremento )( 1 yId.
θ aparece en el sentido negativo del eje
x debido al cambio en y1
.θ y )( 1 xId
.θ aparece en el sentido positivo del eje y
debido al cambio en x1
.θ . En adición, como el sentido del vector ωpI se mueve
cuando la magnitud de los ángulos x1θ y y1θ cambian, los incrementos
xp dI 1θω+ e yp dI 1θω+ aparecen en el sentido positivo de los ejes x y y ,
respectivamente. Por lo tanto, el incremento total por unidad de tiempo en el
sentido negativo del eje x es
dtd
Idt
Id xp
y 11 )( θω
θ−
.
y en el sentido positivo del eje y es

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________81
dt
dI
dtId y
px 11 )( θ
ωθ
+
.
Estos cambios son causados por el momento restaurador del rotor elástico. Las
componentes de este momento restaurador son xδθ en el sentido negativo del
eje y y yδθ en el sentido positivo del eje x , donde δ es la constante de
resorte del rotor para la inclinación. Aplicando la segunda ley de Newton
obtenemos
xypx II δθθωθ −=+ 11
... (2.31a)
yxpy II δθθωθ −=− 11
... (2.31b)
Sustituyendo las relaciones (ver Figura 2.11)
( ) txx ωτθθ cos1 += (2.32a)
( ) tsenyy ωτθθ +=1 (2.32b)
En las ecuaciones (2.31), obtenemos
( ) tIIII pxypx ωτωδθθωθ cos2−=++...
(2.33a)
( ) tsenIIII pyxpy ωτωδθθωθ 2- −=+...
(2.33b)
2.3.2.- Vibraciones Libres y Momentos Giroscópicos.
En ausencia del desbalance dinámico, las ecuaciones (2.33) cambian a

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________82
0=++ xypx II δθθωθ...
(2.34a)
0=+− yxpy II δθθωθ...
(2.34b)
Estas dos ecuaciones son acopladas debido a la existencia de los términos
giroscópicos.
Asumiendo que
( ) [ ]/βθ += ptAx cos (2.35a)
( ) [ ]/βθ += ptsenAy (2.35b)
Sustituyendo estas ecuaciones en las ecuaciones (2.34), se obtiene la
ecuación de frecuencia siguiente
02 =−− δωpIIp p (2.36)
Las raíces de esta ecuación, fp y bp , son dadas por
( )I
IIIp
pp
f 2
42 δωω ++= (2.37a)
( )I
IIIp
pp
b 2
4- 2 δωω += (2.37b)
Este resultado demuestra que las frecuencias naturales cambian como una
función de la velocidad de rotación ω . Si ω se asume positivo, fp es siempre
positivo y bp negativo. Esto significa que fp es la frecuencia natural de un

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________83
modo de volteo forward y bp es la frecuencia natural de un modo de volteo
backward. Adoptando la terminología usada en física para explicar el
movimiento de trompos, estos modos son algunas veces llamados precesión
forward (hacia delante) y precesión backward (hacia atrás), respectivamente.
Gráficas típicas de las frecuencias naturales fp y bp contra la velocidad de
rotación ω son mostradas en la Figura 2.13. La Figura 2.13a es un ejemplo de
un rotor con disco y la Figura 2.13b es un ejemplo de un rotor con cilindro.
Cuando la velocidad de rotación ω se incrementa, la frecuencia natural del
modo de volteo forward, fp , crece y se aproxima asintóticamente a la línea
recta ( )IIp p /ω= . Mientras que, el valor absoluto de la frecuencia natural del
modo de volteo backward, bp , decrece y tiende acero. Hay resonancias en el
punto de cruce de la línea ω=p y la curva fp .
Figura 2.13.- Diagramas de frecuencias naturales (vibración de inclinación): (a) caso II p > ;
(b) caso II p < .

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________84
La diferencia entre las ecuaciones para vibraciones laterales y las ecuaciones
(2.34) para vibraciones de inclinación es la existencia de ypI.
θω+ y xpI.
θω- ,
llamados términos giroscópicos y se deben al cambio direccional del vector
momentum angular ωpI . Los momentos expresados por estos términos pero
con el signo contrario son llamados momentos giroscópicos. En el caso de un
volteo circular con el ángulo de inclinación constante θ , la generación de los
momentos giroscópicos puede ser explicada físicamente como sigue: En la
Figura 2.14, →
L es un vector momentum angular en la dirección de la línea de
centros. La magnitud de este vector es ωpI . Suponga que el disco está
volteando en el sentido forward con la frecuencia natural p (.
ϕ= ). El vector →
L
se mueve desde OA a OB en un tiempo corto dt . El incremento de este
momentum angular, →→
= ABLd tiene la magnitud ( ) ϕωθϕ dIdMA p=____
, y su
dirección coincide con la línea tangente de la circunferencia en el punto A. Por
lo tanto, la variación por unidad de tiempo es ( ) ( ) pIdtdIdtdL pp ωθϕωθ == // . En
la posición mostrada en la Figura 2.14a, este vector tiene la componente
( ) xpp IsenpI.
θωϕωθ −= en el sentido negativo del eje x y la componente
( ) ypp IpI.
θωϕωθ −=cos en el sentido positivo del eje y . El momento
giroscópico gM→
es la inercia acoplada inducida por este cambio en el
momentum angular →
L . Este vector apunta en el sentido opuesto al vector →
AB y
tiene las componentes xpI.
θω− y ypI.
θω− en las direcciones x y y ,
respectivamente. La Figura 2.14b ilustra las direcciones de los momentos
giroscópicos para un volteo forward con frecuencia fp y un volteo backward
con frecuencia bp . En el caso de 0>= fpp , el momento giroscópico actúa
tendiendo a disminuir la inclinación del rotor, y por lo tanto la rigidez aparente
del rotor crece. Como este momento giroscópico es proporcional a ω , la
frecuencia natural fp crece con la velocidad de rotación. En el caso de

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________85
0<= bpp , el momento actúa en la dirección opuesta, y el valor absoluto de la
frecuencia natural bp decrece con la velocidad de rotación.
Figura 2.14.- Generación de momentos giroscópicos: (a) volteo forward de →
L ; (b) dirección del
momento giroscópico.
2.3.3.- Vibraciones Forzadas.
Las ecuaciones de movimiento de un sistema amortiguado son dadas como
sigue:
( )( ) tIIcII pxxypx ωτωδθθθωθ cos2−=+++....
(2.38a)
( )( ) tsenIIcII pyyxpy ωτωδθθθωθ 2−=++−....
(2.38b)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________86
La fuerza de desbalance no actúa si pII = . Por ejemplo pII = en el caso de
un rotor con cilindro cuya longitud es ( )23/ veces su diámetro. Tal rotor con
cilindro es dinámicamente igual a una esfera.
La solución de las ecuaciones (2.38) puede asumirse en la forma
( ) ( )βωθ += tPx cos (2.39a)
( ) ( )βωθ += tsenPy (2.39b)
Sustituyendo (2.39) en (2.38) e igualando los coeficientes de las mismas
funciones trigonométricas en ambos lados, podemos obtener las ecuaciones
para la amplitud P y la fase β . En el caso de amortiguamiento cero ( 0=c ) son
dadas por
( )( ) 2
2
ωδ
τω
p
p
II
IIP
−−
−= (2.40a)
−=
πβ
0 para
c
c
ωωωω
><
(2.40b)
La velocidad crítica principal es la velocidad de rotación en la cual la amplitud
se hace infinita, y es dada por ( ) ( )pc II −= /δω la cual existe sólo para un
rotor con cilindro ( pII > ). En la Figura 2.13, esto corresponde al hecho de que
la línea recta ω=p intersecta con la curva fp sólo en el caso de que pII > .
La Figura 2.15 ilustra las configuraciones del rotor a varias velocidades de
rotación. Note ahora las posiciones relativas del desbalance dinámico τ y el

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________87
cambio en la inclinación θ de acuerdo a la velocidad de rotación. La fuerza F
es la fuerza centrífuga actuando en cada mitad del rotor, y estas fuerzas
constituyen un par que tiende a inclinar al rotor. El sentido de este par cambia
dependiendo de las magnitudes relativas de pI e I . Cuando la velocidad de
rotación se hace infinita, la línea de centros del rotor coincide con la línea de
centros de las chumaceras. Esto es llamado efecto de auto centrado.
Figura 2.15.- Posiciones relativas de los ángulos τ y θ .
2.4.- VIBRACIONES NO LINEALES4.
Cuando la deflexión se hace grande, pueden ocurrir fenómenos debidos a la no
linealidad. Algunos elementos mecánicos de un sistema rotor producen varios
4 Toshio Yamamoto, y Yukio Ishida, Linear and Nonlinear Rotordynamics, Edit. Wiley, U.S.A. 2001.
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________88
tipos de no linealidad. Por ejemplo, claros en rodamientos, capa de lubricante
en chumaceras, y fuerza magnética entre rotor y estator, producen fuerzas de
restauración no lineales. Es sabido que la fricción entre elementos provoca
fuerzas de amortiguamiento no lineales. En sistemas no lineales, aparecen
fenómenos interesantes tales como saltos, resonancias subarmónicas,
resonancias combinadas, vibraciones caóticas, y ciclos límite.
2.4.1.- Causas y Expresiones de no Linealidad Elástica.
Cuando la fuerza de restauración es expresada como una función de la
deflexión, la no linealidad es frecuentemente clasificada en dos tipos. Es
llamada no linealidad débil cuando la desviación desde la relación lineal
llamada ley de Hooke es pequeña, y es llamada no linealidad fuerte cuando se
desvía apreciablemente de ella. En el primer caso, puesto que sus
características pueden ser aproximadas por series de potencias cuyos términos
tienen coeficientes pequeños, el tratamiento teórico es comparativamente fácil.
Sin embargo, el tratamiento teórico en el segundo caso es difícil en general.
Analizaremos el primer caso.
La Figura 2.16 muestra dos casos de características elásticas que son
obtenidas cuando el extremo inferior de un árbol elástico es soportado por dos
diferentes tipos de chumaceras. El extremo superior es soportado por un
rodamiento de bolas auto alineado de dos hileras en ambos casos. La Figura
2.16b es el caso donde el extremo inferior es soportado por un rodamiento de
bolas auto alineado de dos hileras. Como la superficie interior del anillo exterior
es esférica, el anillo interior puede girar libremente y la condición es de soporte
simple. En este caso, la elasticidad del árbol es lineal. La Figura 2.16c es el
caso donde el extremo inferior es soportado por un rodamiento de bolas de
ranura profunda de una hilera Yamamoto [2]. Debido a que las bolas ruedan en
las ranuras practicadas en ambos anillos interior y exterior, el anillo interior no
puede inclinarse en relación al exterior y por lo tanto la condición es de soporte

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________89
fijo. Sin embargo, debido a las pequeñas tolerancias en el anillo interior, bolas,
y anillo exterior, el anillo interior puede inclinarse un poco y la condición es
nuevamente de soporte simple. En la industria, los términos claro radial y axial
son comúnmente usados para expresar la exactitud de los rodamientos. Pero
como en el tratamiento de fuerzas de restitución es más conveniente expresar
el claro por el ángulo, se usará el término claro angular. Este último existe en
todas las direcciones y puede representarse por un cono como se muestra en
la Figura 2.16c. La condición es de soporte simple cuando la línea de centros
del árbol está localizada en este cono y cambia a soporte fijo cuando está fuera
del cono. Como un resultado, la fuerza de restitución es no lineal, como se
muestra en la Figura 2.16c. En la práctica, la transición de soporte simple a
soporte fijo ocurre gradualmente porque los claros alrededor de cada bola
desaparecen uno por uno cuando la inclinación del árbol crece. Por lo tanto, la
transición práctica es comparativamente suave y la elasticidad puede ser
aproximada por series de potencias de bajo orden. Esto es, la no linealidad es
débil.
Figura 2.16.- Claro en chumaceras y características elásticas: (a) sistema rotor; (b) rodamiento
de bolas auto alineado de dos hileras; (c) rodamiento de bolas de ranura profunda de una
hilera.
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________90
Ahora, consideremos un caso donde el extremo inferior es soportado por un
rodamiento de bolas de ranura profunda de una hilera. Si debido a
desalineamientos por ensamble el muñón se inclina un poco desde la línea de
centros de las chumaceras, la línea de centros del muñón cambia desde el
centro del cono, y las fuerzas de restauración difieren dependiendo de la
dirección. Por ejemplo, suponga que el anillo exterior se inclina en el plano yz
como se muestra en la Figura 2.16c, luego la elasticidad en la dirección x es
simétrica, pero en la dirección y es asimétrica. Sabemos desde tal ejemplo
que la elasticidad no lineal de un sistema rotor debe ser considerada en dos
dimensiones.
Para facilitar el tratamiento no lineal de la elasticidad, expresamos la elasticidad
en dos dimensiones por series de potencias de las deflexiones x y y del árbol
[2]. Aquí, los términos mayores que la tercera potencia son despreciados en las
fuerzas de restitución. Luego la energía potencial correspondiente es
representada por términos hasta de cuarto orden como expresa la ecuación
siguiente
3
032
122
213
302
02112
20 yxyyxxykxykxkV εεεε ++++++=
404
313
2222
331
440 yxyyxyxx βββββ +++++ (2.41)
donde ijk son constantes de resorte, y ijε y ijβ son los coeficientes de los
términos no lineales asimétricos y simétricos, respectivamente. Esta es la
expresión más general de las series hasta el cuarto orden.
Usaremos expresiones adimensionales para las ecuaciones de movimiento.
Suponga que todos los parámetros son adimensionalizados por un medio
apropiado. Adicionalmente, sea 011 =k por rotación del sistema de
coordenadas. Luego la ecuación (2.41) se transforma en

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________91
( ) 303
212
221
330
22
21
yxyyxxyxV εεεε +++++=
404
313
2222
331
440 yxyyxyxx βββββ +++++ (2.42)
La distribución de esta energía potencial ilustrada en la Figura 2.17 se desvía
irregularmente desde la parábola ( ) 222 /yxV += ( 0V≡ ). Las fuerzas de
restitución xF y yF se obtienen diferenciando parcialmente la ecuación (2.42)
con respecto a x y y como sigue:
( )xx NxxV
F +−=∂∂
−= (2.43a)
( )yx NyyV
F +−=∂∂
−= (2.43b)
donde los términos no lineales xN y yN están dados por
3
132
222
313
402
12212
30 23423 yxyyxxyxyxN x ββββεεε ++++++= (2.44a)
3
042
132
223
312
03122
21 43232 yxyyxxyxyxN y ββββεεε ++++++= (2.44b)
Figura 2.17.- Distribución de energía potencial.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________92
Suponga que se logra el ensamble perfecto en la Figura 2.16b. Luego la línea
de centros del muñón se localiza en el centro del cono y la elasticidad no lineal
es la misma para todas las direcciones, esto es, isotrópica. Por lo tanto, cuando
el rotor voltea con un radio constante, la fuerza de restitución es constante y
aparentemente en este movimiento no aparece la no linealidad. En otras
palabras, el carácter de no linealidad aparece en el movimiento radial que no
sea circular. Desde tal consideración, encontramos que la expresión en
coordenadas polares es más propia que la expresión en coordenadas
rectangulares. Por lo tanto, usando la transformación
( ) ϕcosrx = (2.45a)
( ) ϕsenry = (2.45b)
expresamos la ecuación (2.42) en coordenadas polares ( ϕ,r ), con las
ecuaciones siguientes:
( ) ( ) ( ) ( )[ ] 333112 33coscos21
rsensenrV scsc ϕεϕεϕεϕε ++++=
( ) ( ) ( ) ( ) ( )[ ] 444220 44cos22cos rsensen scsc ϕβϕβϕβϕββ +++++ (2.46a)
( ) ( ) ( ) ( )[ ] 33
31
12 3coscos21
rrV ϕϕεϕϕε −+−+=
( ) ( ) ( ) ( ) ( )[ ] 44
42
20 4cos2cos rϕϕβϕϕββ −+−++ (2.46b)
Entre los coeficientes de la ecuación (2.42) y aquellos de la ecuación (2.46) son
válidas las relaciones siguientes:
( ) ( )12301 3
41
εεε +=c , ( ) ( )03211 3
41
εεε +=s , ( ) ( )12303
41
εεε −=c

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________93
( ) ( )03213
41
εεε −=s , ( ) ( )0422400 33
81
ββββ ++= , ( ) ( )04402
21
βββ −=c
( ) ( )13312
41
βββ +=s , ( ) ( )0422404
81
ββββ +−=c , ( ) ( )13314
81
βββ −=s (2.47)
( ) ( )[ ] ( )[ ]22 ns
nc
n εεε += , ( )
( )
= −
nc
ns
n ε
εϕ 1tan ( )3,1=n
( ) ( )[ ] ( )[ ]22 ns
nc
n βββ += , ( )
( )
= −
nc
ns
n β
βϕ 1tan ( )4,2=n
De la ecuación (2.46), encontramos que la energía potencial puede ser
descompuesta en componentes teniendo forma regular de distribución. Por
ejemplo, la Figura 2.18 muestra la distribución de energía potencial y la
variación de su magnitud en la posición .cter = en el caso de
( ) ( ) ( )[ ] 3112 cos2/1 rsenrV sc ϕϕε ++= , donde sólo existen los tres primeros
términos de la ecuación (2.46). En este caso, la magnitud de la energía
potencial cambia sólo mientras la dirección del ángulo ϕ cambia desde cero a
π2 . La Figura 2.19 muestra líneas equipotenciales, esto es, las secciones
transversales de la superficie curvada ( )ϕ,rV cortada por el plano horizontal
.cteV = . Cada Figura muestra el caso en el que sólo existe uno de ( )1ε , ( )3ε , ( )0β , ( )2β , y ( )4β . Vemos que las notaciones ( )nε y ( )nβ son los coeficientes
de términos no lineales que representan componentes cuya energía potencial
cambia n veces mientras la dirección del ángulo ϕ cambia desde cero a π2
con r constante. Esta componente no lineal es representada por la notación
( )nN .

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________94
Figura 2.18.- Energía potencial del sistema con sólo la componente ( )1ε .
Figura 2.19.- Curvas equipotenciales: (a) caso con sólo una componente no lineal asimétrica;
(b) caso con sólo una componente no lineal simétrica.
Asumamos que el sistema rotor está ensamblado sin desalineamiento. Luego
la elasticidad es isotrópica y la energía potencial V correspondiendo a la

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________95
ecuación (2.42) es representada por ( ) ( ) ( ) ...2/1 60402 +++= rrrV γβ , esto es,
una serie de potencias con sólo términos de la deflexión r elevados a
potencias pares. La magnitud de estos coeficientes generalmente tiene la
relación ( ) ( ) ...00 >>>> γβ . Cuando la posición de equilibrio cambia por a en la
dirección x debido a un desalineamiento, la elasticidad se hace asimétrica y la
energía potencial correspondiente es obtenida reemplazando x en 222 yxr +=
por ( )ax + . Puesto que términos a la potencia tercera o menor son inducidos
desde el término ( ) 40 rβ , términos a la potencia quinta o menor son inducidos
desde el término ( ) 60 rγ , y así, otras clases de componentes aparecen. Por
ejemplo, ( ) 40 rβ cambia a ( ) ( )[ ] =++2220 yaxβ (términos a la segunda
potencia o menor) ( ) ( )( ) ( ) ( )22202030 44 yxaxyax ++++ βββ . Por lo tanto, los
coeficientes en la ecuación (2.42) desde las ecuaciones (2.47) son dados por ( )a0
1230 4βεε == y 00321 == εε , y luego obtenemos ( ) ( )ac01 4βε = ,
( ) ( ) ( ) 0331 === scs εεε . Concretamente, la componente ( )1N aparece desde
( ) 40 rβ . En una forma similar, sabemos que las componentes ( )1N , ( )2N , y
( )3N aparecen desde ( ) 60 rγ .
En la práctica, es más deseable que aparezcan componentes derivadas desde ( )0β que aquellas derivadas desde ( )0γ , y es más deseable que aparezcan
componentes ( )0N y ( )1N con formas simples de distribución que las
componentes ( )3N y ( )4N con formas de distribución relativamente complejas.
Concretamente, resonancias no lineales debidas a ( )0N pueden aparecer con
apreciable intensidad cuando el ensamble es bueno, y aquellas debidas a ( )1N
pueden aparecer cuando hay desalineamiento.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________96
2.4.2.- Ecuaciones de Movimiento Usando Coordenadas Físicas.
Las ecuaciones (2.38) representan el sistema rotor más simple con momento
giroscópico. En esta sección, investigaremos resonancias usando estas
ecuaciones de movimiento con la adición de términos no lineales.
Introduciendo un ángulo representativo 0τ que tiene una magnitud del mismo
orden que la amplitud de vibración, definimos las cantidades adimensionales
siguientes:
0
*
τθ
θ xx = ,
0
*
τ
θθ y
y = , 0
*
ττ
τ = , I
Ii p
p = , I
cc
−=
δ
*
(2.48)
Itt
−
=δ* ,
I−
=
δ
ωω * ,
−=
δ
τεε 0* ij
ij , −
=δ
τββ
20* ij
ij
Usando estos parámetros, las ecuaciones de movimiento son expresadas
como sigue:
( ) tFNci xxxypx ωθθθωθ θ cos=++++....
(2.49a)
( ) tsenFNci yyyxpy ωθθθωθ θ =+++−....
(2.49b)
donde ( ) 21 τωpiF −= y los términos no lineales xNθ y yNθ se obtienen
reemplazando x y y en xN y yN de las ecuaciones (2.44) por xθ y yθ . Los
parámetros adimensionales representados por asteriscos son eliminados en
estas ecuaciones.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________97
La ecuación de frecuencias derivada desde las ecuaciones (2.49) es
( ) 01 2 =−+= ppipG p ω (2.50)
Las dos raíces fp ( 0> ) y bp ( 0< ) de esta ecuación tienen las relaciones
siguientes
ωpbf ipp =+ , 1−=bf pp (2.51)
2.4.3.- Solución por el Método de Balance Armónico.
Resolveremos las ecuaciones (2.49), escritas en coordenadas físicas, por el
método de balance armónico. En este método, asumiendo que existe una
solución periódica, representamos la solución en series de Fourier. Como
primera aproximación, almacenamos los términos que son considerados a
aparecer con magnitud apreciable y los sustituimos en las ecuaciones de
movimiento. Comparando los coeficientes de los términos con la frecuencia ω
sobre los lados derecho e izquierdo, obtenemos ecuaciones acopladas. En
sistemas rectilíneos ordinarios, estas ecuaciones dan las amplitudes y fases.
Sin embargo, en sistemas rotores, puesto que el número de tales ecuaciones
obtenidas desde las ecuaciones de movimiento en las direcciones xθ y yθ son
más que el número de incógnitas si aplicamos el método en una forma similar,
no se obtiene solución. Por ejemplo, asumamos la solución en la forma de las
ecuaciones (2.52) y consideremos que esta solución es exacta en ( )εO . Si la
sustituimos en las ecuaciones (2.49) y comparamos los coeficientes de
( )βω +tcos y ( )βω +tsen , obtenemos un total de cuatro ecuaciones. Puesto que
hay dos incógnitas P y β , no hay solución que satisfaga las cuatro ecuaciones
simultáneamente. Por lo tanto, tomando en cuenta las características de los
sistemas rotores, revisamos el método en la forma siguiente.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________98
Primero, podemos asumir una solución de ( )0εO en la vecindad de la velocidad
crítica principal cω en la forma siguiente:
( ) ( )βωθ += tPx cos (2.52a)
( ) ( )βωθ += tsenPy (2.52b)
donde las magnitudes de P y β son de ( )0εO . Sustituyendo esto en las
ecuaciones de movimiento e igualando los coeficientes, obtenemos las mismas
expresiones desde las ecuaciones de movimiento en las direcciones xθ y yθ
para una exactitud de ( )0εO . Puesto que la magnitud de F es asumida de
( )εO , no puede permanecer en estas expresiones. En este caso, obtenemos
sólo una solución trivial 0=P , la cual no da resonancia. Luego debemos
asumir una solución para la exactitud de ( )εO en la cual se consideren
pequeñas desviaciones en la orbita.
Cuando la solución en la forma de las ecuaciones (2.52), representando un
movimiento circular con la velocidad angular ω es sustituida en las ecuaciones
(2.49), pequeñas componentes con varias frecuencias se derivan a través de
términos no lineales. Concretamente, la componente de ( )0εO con la
frecuencia ω+ produce componentes de ( )εO con valor constante y con ω± ,
ω2± , ω3± , …, donde + representa un volteo forward y – representa un volteo
backward. Para una exactitud de ( )εO , debemos incluir estas componentes de
orden alto en la solución asumida desde el principio. Cuando ponemos
atención sólo en la frecuencia ω , asumimos la solución incluyendo sólo los
términos con las frecuencias ω± como sigue:
( ) ( ) ( ) ( ) ( ) ( )[ ]2111 coscoscos δωδωεβωθ +−++++= tbtatPx (2.53a)
( ) ( ) ( ) ( ) ( ) ( )[ ]2111 δωδωεβωθ +−++++= tsenbtsenatsenPy (2.53b)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________99
Los términos segundo y tercero representan las componentes derivadas de
modos de volteo forward y backward. Para mostrar explícitamente que un
término tiene la magnitud de ( )εO , el parámetro pequeño ε es usado en las
expresiones. Puesto que las expresiones en las ecuaciones (2.53) son
inconvenientes debido a la existencia de muchos tipos de fase con la misma
frecuencia, usamos las expresiones equivalentes
( ) ( ) ( ) ( ) ( ) ( )[ ]βωβωεβωθ +++++= tsenbtatPx coscos (2.54a)
( ) ( ) ( ) ( ) ( ) ( )[ ]βωβωεβωθ +++++= tbtsenatsenPy cos// (2.54b)
Cuatro incógnitas 1aε , 1bε , 1δ , y 2δ en las ecuaciones (2.53) son
reemplazadas por cuatro incógnitas equivalentes aε , bε , /aε , y /bε en las
ecuaciones (2.54). Sustituimos las ecuaciones (2.54) en (2.49) e igualamos los
coeficientes de ( )βω +tcos y ( )βω +tsen en los lados derecho e izquierdo para
una exactitud de ( )εO . En esta derivación, las amplitudes P , a , b , /a , y /b y
el ángulo de fase β se asumen como funciones del tiempo variando
lentamente, y ésto se representa concretamente haciendo ( )0εOP = ,
( )εOP =.
, y ( )2εOP..
en el proceso analítico. Desde las ecuaciones (2.49),
obtenemos
( ) ( ) ( ) βεωεωωω θ senFNbibPcPi xspp =+−−+−− /2212.
(2.55a)
( ) ( ) ( ) ( ) βεωεωωβω θ cos12 /22 FNaiaPGPi xcpp =++−++−.
(2.55b)
( ) ( ) ( ) ( ) βεωεωωβω θ cos12 /22 FNaaiPGPi yspp =+−+++−.
(2.55c)
( ) ( ) ( ) βεωεωωω θ senFNbbiPcPi ycpp −=+−+−+− /22 12.
(2.55d)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________100
donde xcN θ , xsN θ , ycN θ , y ysN θ son los coeficientes de
( ) ( ) ...cos ++++= βωβω θθθ tsenNtNN xsxcx y
( ) ( ) ...cos ++++= βωβω θθθ tsenNtNN ysycy
los cuales son obtenidos cuando los primeros términos de las ecuaciones
(2.54) son sustituidos en xN θ y yN θ en las ecuaciones (2.49). En tal análisis,
notamos que los coeficientes de términos no lineales son cantidades pequeñas
de ( )εO . Finalmente, obtenemos
32240 2
13 PN xc
+= ββθ , ( ) 313314
3PN xs ββθ += (2.56a)
( ) 313314
3PN yc ββθ += , 3
0422 321
PN ys
+= ββθ (2.56b)
La magnitud de ( )ωG dada por la ecuación (2.50) es ( )εO en la vecindad de la
velocidad crítica principal cω . A través de las ecuaciones (2.55) tenemos seis
incógnitas P , β , aε , bε , /aε , y /bε , las combinaciones (2.55b) + (2.55c),
(2.55a) – (2.55d) generan las ecuaciones (2.57), incluyendo sólo la amplitud P
y el ángulo de fase β si despreciamos los términos ( ) ( )/aaG +εω y
( ) ( )/bbG +εω de ( )2εO :
( ) ( ) ( ) ( ) βωβω θθ cos2222 FNNPGPi ysxcp =+++−.
(2.57a)
( ) ( ) ( ) βωω θθ senFNNPcPi ycxsp 2222 =−+−−.
(2.57b)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________101
Sustituyendo las ecuaciones (2.56) en las ecuaciones (2.57) y transfiriendo los
coeficientes a aquellos en coordenadas polares usando las ecuaciones (2.47),
obtenemos
( ) ( ) ( ) ( ) ββωβω cos42 30 FPPGPi p =++−.
(2.58a)
( ) ( ) βωω senFPcPi p =−−.
2 (2.58b)
En esta expresión, solamente se incluye ( )0β entre los coeficientes incluidos en
las ecuaciones (2.47). Esto significa que para una exactitud de ( )εO , sólo la
componente isotrópica ( )0N entre las componentes ( )0N ,..., ( )4N influye
esta resonancia armónica.
Haciendo 0=.P y 0=
.β en las ecuaciones (2.58) y rearreglandolas, obtenemos
las expresiones (2.59), las cuales dan las soluciones de estado estable 0PP = y
0ββ =
( ) ( ) ( ){ } ( )[ ]( ) 220
2220
04 FPcPG =++ ωβω (2.59a)
( ) ( )
+−= −
201
04
tanPG βω
ωβ (2.59b)
Gráficas fundamentales representando la inclinación de las curvas de
resonancia se obtienen haciendo 0=c y 0=F en las ecuaciones (2.59). Esta
expresión para una gráfica fundamental también da la relación entre la amplitud
y la frecuencia natural en un movimiento de volteo libre.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________102
Desde un punto de vista práctico, en un problema importante además de la
existencia de la solución también importa su estabilidad, para investigarla
consideremos pequeñas variaciones ( )tξ y ( )tη de ( )εO como sigue:
ξ+= 0PP (2.60a)
ηββ += 0 (2.60b)
Si ( )tξ y ( )tη decrecen con el tiempo, la solución es estable; de lo contrario, la
solución es inestable. Sustituyendo las ecuaciones (2.60) en las ecuaciones
(2.58) y linealizando en las variaciones ( )tξ y ( )tη , despreciando los términos
pequeños de ( )3εO y menores, obtenemos
ηξη ** ba +=.
(2.61a)
ηξξ ** dc +=.
(2.61b)
donde
( ) ( )
( ) 0
20
0*
212
PiPG
ap ω
β−
+= ,
( )( ) pp i
cPi
senFb
−−
=−
=22 0
*
ωβ
(2.62)
pic
c−−
=2
* , ( )( )
( ) ( )[ ]( )ω
βωβ
pp iPPG
iF
d−
+−=
−
−=
24
2cos 0
20
00*
Asumiendo las soluciones de las ecuaciones (2.61) como ( ) stAet =ξ y
( ) stBet =η , obtenemos ecuaciones algebraicas en A y B. Las ecuaciones
tienen una solución no trivial si el determinante compuesto por los coeficientes
no es cero. Esta condición produce la ecuación característica siguiente:
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________103
( ) ( ) 0******2 =−−+− cbdascbs (2.63)
Desde el criterio de Routh-Hurwitz, conocemos que las partes reales de las
raíces s son positivas cuando se cumplen las condiciones
( ) 0** >+− cb (2.64a)
( ) 0**** >−− cbda (2.64b)
Como la condición (2.64a) es siempre válida, desde la condición (2.64b)
tenemos la condición de estabilidad siguiente:
( ) ( ) ( )[ ] ( ) ( ) ( )[ ] 0412 2220
020
0 >+++ ωβωβω cPGPG (2.65)
Desde tal análisis, obtenemos las curvas de resonancia mostradas en la Figura
2.20. En esta figura, las curvas de resonancia se ilustran para varios valores de ( )0β en relación a componentes isotrópicos ( )0N . La curva de resonancia es
tipo resorte duro cuando ( ) 00 >β y es tipo resorte suave cuando ( ) 00 <β . En
estos casos, cuando el rotor es acelerado o desacelerado lentamente, la
amplitud salta desde la curva de resonancia de amplitud grande a aquella de
amplitud pequeña. En el caso de ( ) 00 =β , la forma de la curva de resonancia
es la misma como aquella de un sistema lineal aún si existen otras
componentes no lineales. Las curvas continuas e interrumpidas representan
solución estable y no estable, respectivamente. Los puntos con una tangente
vertical son la frontera de las condiciones estable e inestable. Esto puede ser
probado mostrando que la expresión obtenida diferenciando las ecuaciones
(2.59) con respecto a 0P y haciendo ( ) ( ) 00 =∂∂ P/ω coincide con la condición
de estabilidad de la ecuación (2.65) [3].

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________104
Figura 2.20.- Curvas de resonancia a la velocidad crítica principal: (a) ángulo de fase; (b)
amplitud.
2.5.- VIBRACIONES DE UN ROTOR FRACTURADO5.
Una fractura debida a fatiga es una de las principales causas de incidentes y
accidentes en rotores. En un rotor horizontal donde la fuerza de gravedad 5 Toshio Yamamoto, y Yukio Ishida, Linear and Nonlinear Rotordynamics, Edit. Wiley, U.S.A. 2001.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________105
actúa, hay tensión en la parte inferior y compresión en la parte superior.
Cuando el rotor gira, fuerzas periódicas actúan y ocurre la fractura debida a
fatiga. Puesto que la detección temprana de esta fractura es importante para
prevenir desastres, se han estudiado las características vibratorias para
desarrollar sistemas de monitoreo en varios campos [4]. Aquí se enfoca el
fenómeno desde el punto de vista de vibración no lineal. Se ha tratado, un
sistema rotor vertical. Ahora analizaremos un sistema rotor horizontal, donde
aparecen más tipos de resonancias que en un sistema vertical [5].
2.5.1.- Características Elásticas.
Gasch [6], Henry y Okah–Avae [7] investigaron el fenómeno de la vibración de
un rotor fracturado usando el modelo Jeffcott mostrado en la Figura 2.21c. Las
fracturas en maquinaria real tienen formas variadas, pero sus características
físicas son representadas por un modelo tipo media luna mostrado en la Figura
2.21b. La rigidez a la flexión de un rotor fracturado difiere dependiendo de la
dirección y sentido de la deflexión. El nivel de rigidez es bajo cuando la fractura
abre y alto cuando cierra. Bajo estas circunstancias, si consideramos el sistema
de coordenadas // yxO − girando con el rotor fracturado, la elasticidad en la
dirección /y está representada en la Figura 2.21c. La elasticidad en la
dirección /x es lineal. Gasch, Henry y Okah-Avae establecieron ecuaciones de
movimiento y las resolvieron por computadora. Sin embargo, un sistema rotor
tiene resonancias forward y backward en sus modos de volteo que
generalmente muestran diferentes características aún si sus frecuencias son
las mismas. Usaremos un modelo de inclinación de dos grados de libertad con
un momento giroscópico.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________106
Figura 2.21.- Rotor fracturado (deflexión oscilación).
Desde la Figura 2.21 conocemos que las características no lineales de un rotor
fracturado son representadas por
/
1/
xx kM θ=− (2.66a)
( )( )
∆+
∆−=− /
22
/22/
y
yy kk
kkM
θθ
00
/
/
<
>
y
y
θθ
(2.66b)
donde /xθ y /
yθ son las componentes del ángulo de inclinación definido en las
coordenadas rotando en la misma forma como en la Figura 2.11; /xM y /
yM son
las componentes del momento restaurador en los planos /zx y /zy .
Transformando esto en una expresión en coordenadas estáticas y conectando
con la ecuación de movimiento en la sección 2.3.1, podemos obtener las
ecuaciones de movimiento para un rotor fracturado. Además de las cantidades
adimensionales de las ecuaciones (2.48), adoptamos las siguientes

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________107
−
−
∆=∆
δ
δ*1 y
−
∆=∆
δ2
2*2
k (2.67)
las cuales están definidas por el promedio de las constantes de resorte
221 kk +
=−
δ y la diferencia entre ellas 2
21 kk −=∆
−
δ . Luego las ecuaciones de
movimiento son representadas como sigue:
( ) ( )( )tsentci yxxxypx ωθωθθθθωθ 22cos1 212 +∆±∆+∆+++ m....
( ) ( )αω += tM cos (2.68a)
( ) ( )( )ttsenci yxyyxpy ωθωθθθθωθ 2cos21 212 −∆±∆+∆++− m....
( ) ( ) 0MtsenM ++= αω (2.68b)
donde los parámetros adimensionales representados con asteriscos están
eliminados. 0M es un momento constante correspondiente a la gravedad. En
relación a los símbolos ± en las ecuaciones (2.68), tomar todos los signos
superiores dados por las expresiones para 0/ >yθ , y tomar todos los signos
inferiores dados por las expresiones para 0/ <yθ .
Estas ecuaciones de movimiento tienen, simultáneamente, las características
dinámicas siguientes:
• Rotor asimétrico con diferencia direccional en su rigidez.
• Rotación no lineal.
• Acción de un desbalance.
Dado que un rotor fracturado tiene simultáneamente estas tres características,
aparecen muchos fenómenos únicos.
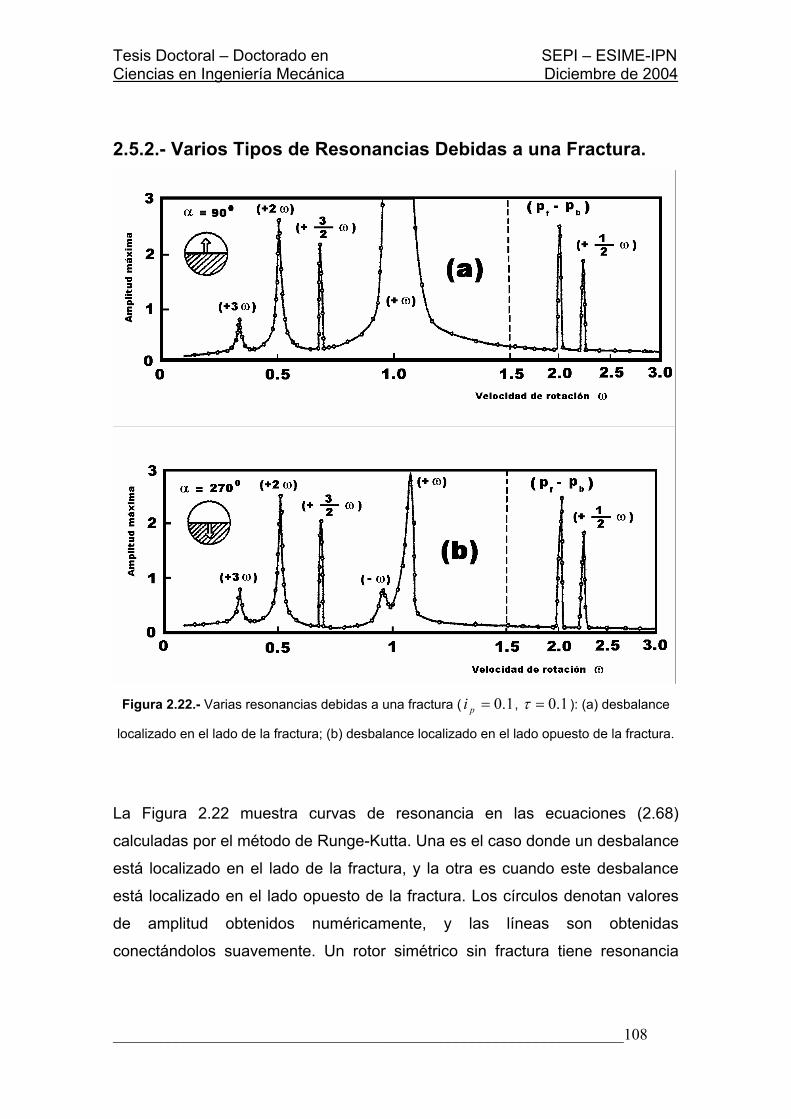
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________108
2.5.2.- Varios Tipos de Resonancias Debidas a una Fractura.
Figura 2.22.- Varias resonancias debidas a una fractura ( 1.0=pi , 1.0=τ ): (a) desbalance
localizado en el lado de la fractura; (b) desbalance localizado en el lado opuesto de la fractura.
La Figura 2.22 muestra curvas de resonancia en las ecuaciones (2.68)
calculadas por el método de Runge-Kutta. Una es el caso donde un desbalance
está localizado en el lado de la fractura, y la otra es cuando este desbalance
está localizado en el lado opuesto de la fractura. Los círculos denotan valores
de amplitud obtenidos numéricamente, y las líneas son obtenidas
conectándolos suavemente. Un rotor simétrico sin fractura tiene resonancia

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________109
sólo en la velocidad crítica principal; sin embargo, este rotor fracturado tiene las
resonancias siguientes:
• Oscilación inestable en la velocidad crítica principal, dependiendo de la
ubicación del desbalance.
• Resonancia armónica de un modo de volteo backward [ ]ω− .
• Resonancias superarmónicas de un modo de volteo forward [ ]ω2+ y
[ ]ω3+ .
• Resonancia subarmónica de un modo de volteo forward ( )[ ]ω21/+ .
• Resonancia súper-subarmónica de un modo de volteo forward
( )[ ]ω23 /+ .
• Combinación de resonancias [ ]bf pp − .
A través de estos cambios de resonancias y dependiendo de la dirección y
magnitud del desbalance, es posible detectar la ocurrencia de una fractura si
ponemos atención a estas resonancias.
2.5.3.- Resonancia Armónica.
Un cambio notable aparece a la velocidad crítica principal, dependiendo de la
dirección del desbalance. Este tipo de resonancia es explicado aquí. La
expresión lineal de las ecuaciones (2.66) es inconveniente para tratamiento
teórico porque debemos usar expresiones diferentes para las fuerzas restantes
dependiendo de la deflexión. Por lo tanto, aproximamos tales características
elásticas por una serie de potencias como sigue:
///xxx kM θ=− (2.69a)
( ) ( ) ( ) ...4/4
3/3
2/2
/// ++++=− yyyyyy kM θεθβθεθ (2.69b)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________110
Un resultado más exacto puede ser obtenido si términos de alto orden son
usados en la dirección /yθ , sin embargo, por simplicidad, la expresión está
limitada a términos de segundo orden. Después de transformar las ecuaciones
(2.69) por las expresiones obtenidas reemplazando /x , /y por /xθ , /
yθ en las
ecuaciones
tysentxx ωω += cos/ tytxseny ωω cos/ +−=
y sustituyéndolas en las ecuaciones (2.69), obtenemos las expresiones
siguientes:
( ) ( ) ( )αωωθωθθθωθ θ +=++∆+++ tMNtsentci xyxxypx cos22cos....
(2.70a)
( ) ( ) ( ) 02cos2 MtsenMNttsenci yyxyxpy ++=+−∆++− αωωθωθθθωθ θ
.... (2.70b)
con cantidades adimensionales, donde //
//
yx
yx
kk
kk
+
−=∆
representa la diferencia direccional en rigidez. Los términos no lineales xN θ y
yN θ están dados por
( )( ) ( ) ( )( )[ ]23131
231
2 234 yyxxx SSCCSSN θθθθ
εθ +−−++−= (2.71a)
( )( ) ( ) ( )( )[ ]23131
231
2 324 yyxyy SCSSCCN θθθθ
εθ +++−−= (2.71b)
donde las notaciones ( )tnCn ωcos= y ( )tnsenS n ω= son usadas por
simplicidad en la representación. En la Figura 2.23, una característica elástica

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________111
lineal es comparada con su aproximación por una serie de potencias hasta el
segundo orden. Estos valores son usados en los cálculos numéricos siguientes.
Figura 2.23.- Comparación de características elásticas.
Puesto que el rotor es horizontal, asumimos la solución armónica para una
exactitud de ( )εO como sigue.
( ) ( ) ( ) ( ) ( ) ( )[ ]βωβωεβωθ ++++++= tsenbtaAtP xx coscos (2.72a)
( ) ( ) ( ) ( ) ( ) ( )[ ]βωβωεβωθ ++++++= tbtsenaAtsenP yy cos// (2.72b)
Estas expresiones son obtenidas agregando términos constantes a las
ecuaciones (2.54), las cuales son la solución de un sistema rotor con momento
giroscópico, con resonancia no lineal, y usando dos grados de libertad.
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________112
Sustituyendo las ecuaciones (2.72) en las ecuaciones (2.69) y usando el
método de balance armónico para una exactitud de ( )0εO , obtenemos 0/ =xA
y 0/ MAy = . Similarmente, para una exactitud de ( )εO , obtenemos las
ecuaciones siguientes:
( ) ( ) ( )[ ] ( )βεββ senMPPGPPA f2
02
2 2341
2cos ++∆+=.
( ) ( ) ( )βαβε −−− cos341 2
2 MsenP (2.73a)
( ) ( ) ( )[ ] ( )βεβω cos241
2 20
22 MPsenPPcPA f ++∆+−=
.
( ) ( ) ( )βαβε −++ senMP 3cos41 2
2 (2.73b)
donde ( ) 02 >−= ωpf iA y ( ) 221 ωωω −+= piG . Por el procedimiento de
balance armónico, podemos obtener las soluciones armónicas e investigar su
estabilidad.
Las curvas de resonancia son mostradas en las Figuras 2.24 y 2.25. La primera
de estas Figuras es un caso con un desbalance comparativamente grande y
corresponde a la Figura 2.22. En este caso, las formas de las curvas de
resonancia cambian significativamente, dependiendo de la dirección del
desbalance. Cuando está localizado en el mismo lado de la fractura, las curvas
de resonancia exhiben una región de gran amplitud y, como resultado, aparece
una zona inestable. Por el lado contrario, cuando el desbalance está de lado
opuesto al de la fractura, la región inestable desaparece y sólo aparecen
vibraciones de estado estable. La Figura 2.25 es un caso con desbalance
comparativamente pequeño. Una zona inestable aparece para cualquier
dirección del desbalance. Esto es debido al efecto de términos paramétricos en
las ecuaciones de movimiento porque predominan debido al desbalance
pequeño. Si el caso no desbalanceado ( 0=M ) es calculado, también son
obtenidas curvas de resonancia con una zona inestable [5].

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________113
En estas Figuras, los resultados de la simulación numérica usando un modelo
parcialmente lineal son ilustrados por círculos. De la comparación aseveramos
que la aproximación de segundo orden produce un resultado razonablemente
bueno.
Figura 2.24.- Resultado teórico para un modelo en series de potencias y resultado numérico
para un modelo parcialmente lineal (desbalance grande, 1.0=τ ).

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________114
Figura 2.25.- Resultado teórico para un modelo en series de potencias y resultado numérico
para un modelo parcialmente lineal (desbalance pequeño, 001.0=τ ).
2.6.- VIBRACIONES INDUCIDAS POR EL FLUJO6.
Las chumaceras con capa de fluido son ampliamente usadas en maquinaria
rotatoria porque tienen varias ventajas, tal como gran capacidad de carga, vida
infinita con buena lubricación, y gran amortiguamiento. Pueden ser
hidrodinámicas o hidrostáticas dependiendo de cómo sea creada la presión del
lubricante.
2.6.1.- Vibraciones Auto – Excitadas.
En la Figura 2.26a se muestra un rotor elástico soportado por chumaceras en
ambos extremos. La parte del rotor en la chumacera es llamada muñón. La
razón del claro radial (espesor de la capa de fluido) entre el diámetro del
muñón cuando la excentricidad es cero, generalmente es más pequeña que
6 Toshio Yamamoto, y Yukio Ishida, Linear and Nonlinear Rotordynamics, Edit. Wiley, U.S.A. 2001.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________115
0.001. En un rotor horizontal donde la gravedad influye, el muñón se mueve
hacia abajo y hace contacto en el punto A cuando el rotor no está girando.
Cuando el rotor gira, el lubricante fluye en la parte con forma de cuña y se crea
alta presión, la cual soporta al muñón y también lo desplaza un ángulo θ . La
capa de fluido trabaja de manera equivalente a un resorte y un amortiguador, y
el rotor vibra alrededor de esta posición de equilibrio.
Figura 2.26.- Rotor soportado por chumaceras: (a) sistema rotor – chumaceras; (b) amplitud y
frecuencia; (c) diagrama en cascada de un experimento (c de Muszynska, 1988).

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________116
Puesto que el efecto de amortiguamiento es muy grande, las resonancias en
respuesta al desbalance son minimizadas. Sin embargo, si el diseño es
inapropiado, pueden producir violentas vibraciones auto excitadas arriba de la
velocidad crítica principal. La Figura 2.26b muestra la amplitud y frecuencia de
vibración de un rotor como función de la velocidad de rotación ω , cuando ésta
se incrementa, una resonancia armónica debida al desbalance ocurre en la
vecindad de la velocidad crítica principal cω . Cuando la velocidad crece aún
más, una vibración auto excitada llamada volteo de lubricante (oil whirl) ocurre
por arriba de la velocidad de rotación aω . La frecuencia de esta vibración es
alrededor de un medio de ω . Cuando un oil whirl ocurre, el rotor voltea en
sentido hacia delante (forward) con pequeña amplitud sin deformación,
equivalente a un rotor rígido. Muszynska [8] reportó que la frecuencia real es
ligeramente más pequeña que la mitad de la velocidad de rotación aún cuando
este valor varia dependiendo del tipo de chumacera y excentricidad estática. El
umbral de velocidad aω algunas veces es menor que la velocidad crítica
principal (en relación a la Figura 2.26c, este diagrama tridimensional del
espectro de varias velocidades de rotación es llamado diagrama en cascada).
Cuando la velocidad de rotación crece aún más, una vibración violenta auto
excitada inicia en alrededor de dos veces la velocidad crítica principal y persiste
en un amplio rango de velocidad por arriba de la mencionada anteriormente.
Esta vibración es llamada movimiento circular de vaivén del lubricante (oil
whip). La frecuencia de un oil whip es aproximadamente igual a una frecuencia
natural del sistema. Al acelerar el rotor, algunas veces no aparece el oil whip
aún si la velocidad excede el doble de la velocidad crítica principal. Sin
embargo, una vez que el oil whip ocurre, no desaparece a menos que la
velocidad se reduzca a un valor menor al doble de la velocidad crítica principal.
Como resultado se tiene la curva de amplitud mostrada en la Figura 2.27
cuando se acelera y desacelera el rotor. Tal fenómeno de histéresis es llamado
efecto inercial.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________117
Figura 2.27.- Efecto inercial.
El oil whip fue descubierto por Newkirk y Taylor [9]. Ellos dieron la explicación
siguiente. Asuma que el rotor está volteando con la velocidad angular ω y la
excentricidad e como muestra la Figura 2.28. Sea ν la velocidad del fluido en
la superficie del muñón y sea cero su velocidad en la superficie de la
chumacera estacionaria. Si se asume que la velocidad del fluido cambia
linealmente en la dirección radial considerando una capa de lubricante delgada,
la velocidad promedio sería 2/ν . Aquí consideramos el volumen del fluido
entrando y saliendo de la parte punteada ABDC durante la unidad de tiempo.
Sean 1, R , y c la longitud, radio interior, y claro radial de la chumacera,
respectivamente, y e la excentricidad del rotor. Luego los volúmenes del fluido
pasando a través de la sección AB (A y B se encuentran separados una
distancia c ) y CD (C y D se encuentran separados una distancia ec − ) por
unidad de tiempo son 2/cv y ( ) 2/vec − , respectivamente. Por lo tanto, el
exceso de lubricante es igual a 2/ev . Puesto que el lubricante es incompresible,
si no gotea, el muñón debe moverse para compensar la diferencia. Los
volúmenes de ABDC y EFBA son
22Re
c π- y
+22Re
c π ,
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________118
respectivamente, y su diferencia es 2/Reπ . Asumimos que el punto S rota el
ángulo θ por unidad de tiempo y la parte punteada toma en este incremento
2/ev . Luego, desde la relación
2
2
2Re
e
π
ν
πθ
= , tenemos 22ω
ν
θ == R .
esto muestra que la velocidad angular de precesión es 2/ω , esto es, la
velocidad angular de un oil whirl es la mitad de la velocidad de rotación.
Cuando la velocidad de rotación alcanza el doble de la velocidad crítica
principal durante la aceleración, la velocidad de precesión coincide con una
frecuencia natural forward, y un oil whip ocurre con gran amplitud por esta
estimulación. Sin embargo, notemos que ésta es una explicación cualitativa
muy elemental y no es una teoría completa. Por ejemplo, no se ha podido
explicar porque el oil whip persiste arriba de dos veces la velocidad crítica
principal ni porque ocurre el efecto inercial mostrado en la Figura 2.27.
2.6.2.- Ecuación de Reynolds.
Para obtener la fuerza actuando sobre el muñón debida a la capa de lubricante,
se debe conocer la distribución de presión en dicha capa. Para este propósito,
primero debe deducirse la ecuación de Reynolds. En la Figura 2.29 está una
vista agrandada de una parte de la capa de lubricante de la Figura 2.28. Se
asume que el lubricante es un fluido Newtoniano, incompresible y con flujo
laminar. El espesor de la capa de lubricante ( )txh , es tan delgado comparado
con el diámetro del muñón que la curvatura puede ser despreciada. El sistema
de coordenadas rectangular está ubicado como lo indica la Figura 2.29. La
superficie del muñón (radio igual a r ), girando a una velocidad ω , se mueve
con la velocidad circunferencial rU ω= .

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________119
Figura 2.28.- Deducción de la velocidad whirling.
Figura 2.29.- Balance de Fuerzas en fluido: (a) vista agrandada; (b) balance de fuerzas; (c)
velocidades de fluido.
Un pequeño paralelepípedo con dimensiones dx , dy , y dz es considerado en el
lugar geométrico ( )zyx ,, en la capa de lubricante como se muestra en la

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________120
Figura 2.29. Para deducir las ecuaciones de equilibrio de la presión p y del
esfuerzo cortante τ , se considera la segunda Ley de Newton despreciando la
inercia del fluido por ser suficientemente pequeña, en cuyo caso la relación
válida en la dirección x es la siguiente:
0=
∂∂
++−
∂
∂+− dxdzdy
ydxdzdydzdx
xp
ppdydzτ
ττ (2.74)
la que se reduce a yx
p∂∂
=∂
∂ τ (2.75)
Sean u , v , y w las velocidades del fluido en las direcciones x , y , y z , y µ la
viscosidad absoluta. Luego el esfuerzo cortante es dado por
yu
∂∂
= µτ (2.76)
Desde las ecuaciones 2.75 y 2.76, tenemos
2
2
yu
xp
∂
∂=
∂
∂µ (2.77)
Integrando (2.77) y asumiendo que la presión no cambia en la dirección y ,
obtenemos la expresión siguiente:
212
21
CyCyxp
u ++
∂∂
=µ
(2.78)
Al aplicar las condiciones de frontera 0=u en 0=y y Uu = en hy = se
obtiene

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________121
( ) yhU
yhyxp
u +−
∂
∂=
µ21
(2.79)
Similarmente obtenemos la velocidad w en la dirección z
( )yhyzp
w −
∂
∂=
µ21
(2.80)
A continuación, consideramos la continuidad del fluido concerniente al
elemento mostrado en la Figura 2.29c. Sean xq y zq las cantidades de fluido
por unidad de tiempo que pasan a través de las caras AEHD y DHGC en las
direcciones x y z , respectivamente. Desde las ecuaciones (2.79) y (2.80),
tenemos
+
∂∂
−== ∫ 212
3
0
Uhxph
dzudydzqh
x µ (2.81a)
∂
∂−== ∫ z
phdxwdydxq
h
z µ12
3
0 (2.81b)
Puesto que el lubricante es incompresible, el volumen de este elemento debe
crecer con h de tal manera que incluya el incremento del fluido en este
elemento durante el tiempo dt . Por lo tanto, debe valer lo siguiente:
dtth
dxdzdzdtz
qdxdt
xq zx
∂∂
=
∂
∂+
∂
∂− (2.82)
Sustituyendo (2.82) en las ecuaciones (2.81), llegamos a la ecuación de
Reynolds siguiente:

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________122
th
xh
Uzph
zxph
x ∂∂
+∂∂
=
∂∂
∂∂
+
∂∂
∂∂
12633
µµ (2.83)
2.6.3.- Fuerza de la Capa de Lubricante.
Figura 2.30.- Fuerza de la capa de lubricante y ubicación del muñón: (a) distribución de
presión; (b) distribución de presión y fuerza de la capa de lubricante; (c) orbita de una posición
de equilibrio.
La ecuación (2.83) permite obtener la distribución de presión. Si ésta es
conocida, podemos obtener la fuerza de reacción actuando sobre el muñón.
Sin embargo, puesto que es generalmente imposible resolver analíticamente
(2.83), debemos usar algún método aproximado o medios numéricos usando
computadora. Hori [10] simplificó el análisis asumiendo que la longitud de la
chumacera es infinita. El problema se reduce a dos dimensiones. Obtuvo la
expresión para la fuerza de la capa de lubricante y discutió la estabilidad del
sistema rotor completo. Funakawa y Tatara [11] mostraron que los resultados
teóricos deducidos asumiendo chumacera infinita poco pueden explicar los

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________123
resultados experimentales más precisos desde un punto de vista cuantitativo.
En chumaceras prácticas, la razón de su longitud entre el diámetro del muñón
(es decir, dl/ en la Figura 2.30) tiene un valor entre 1 y 2. Para tal valor
específico, la ecuación (2.83) debe ser resuelta numéricamente usando
computadora.
2.6.3.1.- Aproximación de Chumacera Corta.- En el análisis de chumacera
corta, consideramos que la variación de la presión en la dirección z es mucho
más grande que aquella en la dirección x
zp
xp
∂
∂<<
∂
∂
y se desprecia el primer término en el lado izquierdo de la ecuación (2.83).
Luego la ecuación de Reynolds se simplifica a
th
xh
Uz
ph∂∂
+∂∂
=∂
∂126
2
23
µ (2.84)
En las Figura 2.30a y 2.30b, adoptamos las condiciones de frontera siguientes:
0=∂
∂
zp
para 0=z y 0=p (presión atmosférica) para 2l
z ±= .
Poniendo Rx ϕ= y ωRU = e integrando la ecuación (2.84), obtenemos
−
∂∂
+∂∂
=4
23 3
23
lz
thh
hp
ϕω
µ (2.85)
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________124
Sean c , e , y cek /= el claro de la chumacera, la excentricidad, y la razón de
excentricidad, respectivamente. El espesor de la capa de lubricante es dado
por
( )ϕcos1 kch += (2.86)
Sustituyendo (2.86) en (2.85) se obtiene
( )
−
+−
+=
42cos2
cos1
3 22
32
lzsenkk
kcp ϕθωϕ
ϕ
µ .. (2.87)
donde reemplazamos .
ϕ por .
θ , porque conocemos la relación −ϕ ángulo
θ=BAOb desde la Figura 2.30b. Vemos que la presión en el punto A depende
también de las razones de cambio .k y
.θ cuando el rotor está volteando.
Conocemos desde esta expresión que cuando el muñón esta rotando en la
posición de equilibrio ( 0==..
ϕk ), la distribución de presión periférica en el plano
donde 0=z es simétrica alrededor de πϕ = , y es positiva en la zona desde
0=ϕ a πϕ = y negativa en la zona desde πϕ = a πϕ 2= en la Figura 2.30.
Esta distribución de presión es llamada condición de Sommerfeld y persiste
cuando la presión es muy pequeña. Sin embargo, en la práctica, la presión en
la zona desde πϕ = a πϕ 2= es casi cero (es decir, la presión atmosférica)
debido a la posibilidad de evaporación del lubricante y de aireamiento axial del
flujo. Tomando en consideración esta situación, la presión en la zona desde
πϕ = a πϕ 2= se establece como 0=p . Esta nueva distribución es llamada
condición de Gumbel. En la Figura 2.31 se muestran las dos distribuciones
anteriores, así como una tercera llamada condición de Reynolds, la cual
expresa la situación práctica con más precisión, sin embargo la condición de
Gumbel es usada ampliamente en análisis debido a su simplicidad.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________125
Figura 2.31.- Condiciones de frontera: (a) condición de Sommerfeld; (b) condición de Gumbel;
(c) condición de Reynolds.
Si la condición de Gumbel es adoptada, las fuerzas de la capa de lubricante en
las direcciones mostradas en la Figura 2.30b son dadas por
∫ ∫+
−
−=2/
2/ 0
cosl
l
dzdpRNπ
ϕϕ (2.88a)
∫ ∫+
−
=2/
2/ 0
l
l
dzdpsenRTπ
ϕϕ (2.88b)
Sustituyendo la ecuación (2.87) en las ecuaciones (2.88), se obtienen [11]
( )( )
( )
−
++
−
+
=2/52
2
22
232
1
21
1
22
21
k
kk
k
k
Rl
cR
N
..
πθω
µ (2.89a)
( ) ( )
−+
−
+
=222/32
32
1
4
12
2
21
k
kk
k
k
Rl
cR
T.
.θωπ
µ (2.89b)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________126
2.6.3.2.- Aproximación de Chumacera Larga.- Asumimos que la presión no
cambia en la dirección z (es decir, derivada de p respecto a z igual a cero) y
despreciamos el segundo término de lado izquierdo de la ecuación (2.83).
Cuando la condición de Gumbel es adoptada, se obtienen
( )( ) ( ) ( )
+−
−+
−+
−
=22/3222
22
28
21
212
226
kk
kkk
kRl
cR
Nπ
πθω
µ.
.
(2.90a)
( )( ) ( )( )
−++
−+
−
=2/1222/122
2
12
4
12
26
kk
kk
kk
kRl
cR
T.
.θωπ
µ (2.90b)
Cuando un rotor gira, las fuerzas de la capa de lubricante son generadas y el
muñón flota como muestra la Figura 2.30b. La posición de equilibrio ( )00 ,θkO j
del centro del muñón está determinada por el balance entre la carga de
gravedad 0F actuando hacia abajo y la fuerza de la capa de lubricante
( )00 ,TN , la cual se obtiene fijando ωθ =.
y 0=.k en las ecuaciones (2.89) y
(2.90). El resultado muestra que la posición de equilibrio está determinada por
la cantidad adimensional, llamada número de Sommerfeld:
mpn
cR
Sµ2
= (2.91)
donde n , en revoluciones por segundo, es la velocidad de rotación y
( ) ( )RlFp m 20 /= es la presión promedio en el muñón. Esto significa que aún si
la velocidad de rotación y la viscosidad del lubricante cambian, la posición de
equilibrio no cambia si el número de Sommerfeld es el mismo. La Figura 2.30c
muestra la ubicación de esta posición de equilibrio. La deflexión radial es

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________127
mostrada por la excentricidad adimensional k en esta figura. Cuando el rotor
no está girando (es decir, 0=S ), el muñón está en la parte más baja de la
chumacera. Cuando la velocidad de rotación crece (es decir, cuando S crece),
el centro del muñón flota y cambia su posición a lo largo de la circunferencia y
llega al centro de la chumacera cuando la velocidad de rotación se hace
extremadamente alta ( ∞=S ).
2.7.- MÉTODO DEL ELEMENTO FINITO.
El método del elemento finito es un procedimiento numérico que puede ser
usado para obtener soluciones de un gran número de problemas de ingeniería
involucrando análisis de esfuerzos, transferencia de calor, electromagnetismo,
y flujo de fluidos. ANSYS es un paquete, de propósito general, para elemento
finito que será empleado para este efecto.
2.7.1.- Problemas en Ingeniería.
Los problemas en ingeniería implican resolver modelos matemáticos de
situaciones físicas, ecuaciones diferenciales con un conjunto correspondiente
de condiciones iniciales y de frontera. Dichas ecuaciones son obtenidas con las
leyes y principios de la naturaleza aplicados a un sistema o a un volumen de
control. Estas ecuaciones gobernantes representan balance de masa, fuerza, o
energía. Cuando son posibles, las soluciones exactas de estas ecuaciones
determinan con detalle el comportamiento de un sistema bajo un conjunto dado
de condiciones. Las soluciones analíticas se componen de dos partes: (1) una
parte homogénea y (2) una particular. En cualquier problema dado de
ingeniería, hay dos conjuntos de parámetros que influyen en la forma en la cual
se comporta un sistema. Primero, hay aquellos parámetros que proveen
información relacionada con el comportamiento natural del sistema. Éstos

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________128
incluyen propiedades tales como módulos de elasticidad, conductividad
térmica, y viscosidad.
Por otro lado, hay parámetros que producen disturbios en un sistema. Ejemplos
de éstos incluyen fuerzas externas, momentos, diferencias de temperatura a
través de un medio, y diferencias de presión en flujo de fluidos.
Los parámetros relacionados con el comportamiento natural del sistema
aparecen en la parte homogénea de la solución. En contraste, los parámetros
que causan disturbios aparecen en la solución particular. Es importante
entender la función de estos parámetros en el modelado de elementos finitos
en términos de su respectiva aparición en las matrices de rigidez o
conductancia y las matrices de carga o fuerza.
2.7.2.- Métodos Numéricos.
Hay muchos problemas prácticos en ingeniería para los cuales no se pueden
obtener soluciones exactas. Para tratar con tales casos, recurrimos a
aproximaciones numéricas. En contraste a soluciones analíticas, las cuales
muestran el comportamiento exacto en algún punto dentro del sistema, las
soluciones numéricas se aproximan a las exactas sólo en puntos discretos,
llamados nodos. El primer paso de cualquier procedimiento numérico es la
discretización. Este proceso divide al medio de interés en un número de
pequeñas subregiones y nodos. Hay dos clases comunes de métodos
numéricos: (1) método de diferencias finitas y (2) método del elemento finito.
Con el primer método, la ecuación diferencial se escribe para cada nodo, y las
derivadas son reemplazadas por diferencias. Esta aproximación conduce a un
conjunto de ecuaciones lineales simultáneas. Aún cuando el método de
diferencias finitas es fácil de entender y aplicar en problemas simples, se hace
difícil su aplicación a problemas con geometrías o condiciones de frontera

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________129
complejas. Esta situación es también válida para problemas con propiedades
de material no isotrópicas.
En contraste, el método del elemento finito usa formulaciones integrales para
crear un sistema de ecuaciones algebraicas. Además, una función continua
aproximada es asumida para representar la solución en cada elemento. La
solución completa es luego generada conectando o ensamblando las
soluciones individuales, asegurando la continuidad en las fronteras entre
elementos.
Desde el punto de vista de la teoría de conjuntos, el método de diferencias
finitas puede ser considerado como un caso particular del método del elemento
finito. También pueden ser considerados como tales los métodos siguientes:
Elemento frontera, Elemento banda, y Volumen finito.
2.7.3.- El método del Elemento Finito.
El método de elementos finitos es un procedimiento numérico que puede ser
aplicado para obtener soluciones a una variedad de problemas en ingeniería;
incluyendo sistemas estables, transitorios, lineales, o no lineales; al analizar
esfuerzos, transferencia de calor, flujo de fluidos, y electromagnetismo. El
origen del método moderno de elementos finitos se remonta a los inicios del
siglo veinte, cuando algunos investigadores aproximaron y modelaron un
continuo elástico usando barras elásticas equivalentes discretas. Sin embargo,
Courant [12] fue el primero en desarrollar el método. En un artículo publicado a
principios de los años cuarenta, Courant usó interpolación polinomial sobre
subregiones triangulares para investigar problemas de torsión.
Fue hasta 1960 cuando Clough [13] acuño el popular término “elemento finito”.
Durante los años sesenta, los investigadores comenzaron a aplicarlo a otras
áreas de la ingeniería, tales como transferencia de calor y problemas de

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________130
visualización de flujos. Zienkiewicz and Cheung [14] escribieron el primer libro
dedicado completamente al método. En los 70, aparecieron por primera vez los
paquetes comerciales. Éstos pueden analizar problemas estáticos, dinámicos,
de transferencia de calor, de flujo de fluidos, y electromagnéticos. Para
cualquier paquete de elemento finito es imperativo conocer los conceptos
básicos y limitaciones del método.
2.7.4.- Pasos Básicos en el Método de Elementos Finitos.
Los pasos básicos involucrados en cualquier análisis de elementos finitos son:
Fase de Preproceso
1. Crear y discretizar el dominio de la solución en elementos finitos; esto
es, subdividir el problema en nodos y elementos.
2. Asumir una función de forma para representar el comportamiento físico
de un elemento; es decir, una función continua aproximada es asumida
para representar la solución de un elemento.
3. Desarrollar ecuaciones para un elemento.
4. Ensamblar los elementos para presentar el problema completo.
Construir la matriz de rigidez global.
5. Aplicar condiciones de frontera, condiciones iniciales, y cargas.
Fase de Solución
6. Resolver simultáneamente un conjunto de ecuaciones algebraicas
lineales o no lineales para obtener resultados nodales, tales como
valores de desplazamiento o valores de temperatura en diferentes
nodos.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________131
Fase de Posproceso
7. Obtener otra información importante a partir de los datos obtenidos en la
fase de solución.
En general, hay varias aproximaciones para formular problemas con elemento
finito: (1) Formulación Directa, (2) Formulación de Energía Potencial Total
Mínima, y (3) Formulación de Residuos Ponderados.
2.7.5.- Formulación Directa
El problema siguiente ilustra los pasos y el procedimiento involucrados en la
formulación directa.
y L
w1
P
2w
Figura 2.32.- Barra de sección variable sometida a carga axial.
Considere una barra de sección transversal variable soportando una carga P ,
como muestra la Figura 2.32. La barra está fija en un extremo y soporta la
carga P en el otro. Sean 1w y 2w el ancho en las partes superior e inferior,

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________132
respectivamente, t su espesor, y L su longitud. El módulo de elasticidad de la
barra será denotado por E . Estamos interesados en determinar que tanto se
deformará la barra en varios puntos a lo largo de su longitud cuando está sujeta
a la carga P . Despreciaremos el peso de la barra, asumiendo que la carga
aplicada es considerablemente más grande.
Fase de Preproceso
1. Discretización del dominio de la solución en elementos finitos.
L
P
1
2
3
4
5P
LA2
1A
3A
4A
l 1
2l
3l
4l
1u
L
P
1
elemento 1
u 2 elemento 22
u 3 elemento 33
u 4 elemento 44
u 55
Figura 2.33.- Subdividiendo la barra en elementos y nodos.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________133
Iniciamos subdividiendo el dominio en 5 nodos y 4 elementos como muestra la
Figura 2.33. Nótese que se puede incrementar la exactitud de nuestros
resultados generando un modelo con nodos y elementos adicionales. La barra
dada es modelada usando cuatro segmentos individuales, teniendo cada uno
de ellos una sección transversal diferente. El área de la sección transversal de
cada elemento es representada por el área promedio de las secciones
transversales en los nodos que definen el elemento.
2. Asumir una solución que aproxime el comportamiento de un elemento.
Para estudiar el comportamiento de un elemento típico, considérese la
deformación de un miembro sólido con una sección transversal uniforme A que
tiene una longitud l cuando se sujeta a una fuerza F , como muestra la Figura
2.34.
F
ll
F
x
Figura 2.34.- Un elemento sólido de sección transversal uniforme sujeto a una fuerza F .
El esfuerzo promedio en el elemento es dado por
AF
=σ (2.92)
La deformación normalizada promedio ε del elemento es definida como el
cambio en longitud l∆ entre la longitud original l del elemento:

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________134
ll∆
=ε (2.93)
nodo 1:
P
R1
nodo 2:
nodo 3:
nodo 4:
nodo 5:
k (u - u )1 2 1
121k (u - u )
232k (u - u )
232k (u - u )
343k (u - u )
343k (u - u )
454k (u - u )
454k (u - u )
Figura 2.35.- Diagramas de cuerpo libre de los nodos.
En la región elástica, los esfuerzos y las deformaciones se relacionan por la
Ley de Hooke
εσ E= (2.94)
donde E es el módulo de elasticidad del material. Combinando las ecuaciones
(2.92), (2.93), y (2.94) y simplificando, se obtiene

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________135
ll
AEF ∆
= (2.95)
Nótese que la ecuación (2.95) es similar a la ecuación para un resorte lineal,
kxF = .
Luego, un elemento de sección transversal uniforme cargado centralmente
puede ser modelado como un resorte con una rigidez equivalente
∆
=lE
k eq (2.96)
Retornando nuestra atención al problema de ejemplo, notamos nuevamente
que la sección transversal de la barra varia en la dirección y . Como una
primera aproximación, modelamos la barra como una serie de elementos
cargados centralmente con secciones transversales diferentes, como muestra
la Figura 2.33. Luego, la barra es representada por un modelo compuesto por
cuatro resortes elásticos (elementos) en serie, y el comportamiento elástico de
un elemento es modelado por un resorte lineal equivalente de acuerdo a la
ecuación
( ) ( ) ( ) ( )iiii
iip
iieq uul
EAAuu
l
EAuukf −
+=−=−= +
+++ 1
111 2
(2.97)
donde la rigidez equivalente del elemento es dada por
( )l
EAAk ii
eq 21 +
= + (2.98)
iA y 1+iA son las áreas de las secciones transversales de los elementos en los
nodos i e 1+i , respectivamente, y l es la longitud de los elementos.
Empleando el modelo anterior, consideremos las fuerzas actuando sobre cada

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________136
nodo. Los diagramas de cuerpo libre de los nodos, se muestran en la Figura
2.35.
El equilibrio estático requiere que la suma de las fuerzas actuando en cada
nodo sea cero. Esto nos lleva a las cinco ecuaciones siguientes:
nodo 1: ( ) 01211 =−− uukR
nodo 2: ( ) ( ) 0232121 =−−− uukuuk
nodo 3: ( ) ( ) 0343232 =−−− uukuuk (2.99)
nodo 4: ( ) ( ) 0454343 =−−− uukuuk
nodo 5: ( ) 0454 =−− puuk
Rearreglando las ecuaciones de equilibrio dadas por (2.99) separando la fuerza
de reacción 1R y la fuerza externa aplicada P de las fuerzas internas,
tendremos la ecuación (2.100) siguiente:
Pukukukukukuk
ukukukukukukukuk
Rukuk
=−=−−=−−=−−
−=−
5444
54444333
43333222
32222111
12111
000
Presentando las ecuaciones (2.100) en forma matricial, se obtiene

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________137
−
=
−−+−
−+−−+−
−
P
R
uuuuu
kkkkkk
kkkkkkkk
kk
000
00000
0000000 1
5
4
3
2
1
44
4433
3322
2211
11
(2.101)
En la matriz de carga también es importante distinguir entre las fuerzas de
reacción y las fuerzas aplicadas. Por lo tanto, la relación matricial (2.101)
puede ser escrita como:
−
−−+−
−+−−+−
−
=
−
Puuuuu
kkkkkk
kkkkkkkk
kkR
0000
00000
0000000
0000
5
4
3
2
1
44
4433
3322
2211
111
(2.102)
Se puede demostrar que bajo cargas nodales adicionales y otras condiciones
de frontera, la relación dada por la ecuación (2.102) puede expresarse en la
forma general
{ } [ ]{ } { }FuKR −= (2.103)
La cual establece
{ } [ ]{ } { }carga de matrizentosdesplazami de matrizrigidez de matrizreacción de matriz −=
Retornando nuevamente nuestra atención al problema, encontramos que
debido a que la barra está fija en la parte superior, el desplazamiento del nodo
es cero. Luego, en el primer renglón del sistema de ecuaciones dado por
(2.101) se debe hacer 01 =u . Luego, la aplicación de la condición de frontera
conduce a la ecuación matricial siguiente:

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________138
=
−−+−
−+−−+−
Puuuuu
kkkkkk
kkkkkkkk
0000
00000
000000001
5
4
3
2
1
44
4433
3322
2211
(2.104)
La solución de la ecuación anterior conduce a los valores de desplazamiento
nodal.
3. Desarrollo de ecuaciones para un elemento
Debido a que cada uno de los elementos tiene dos nodos, y con cada nodo
tenemos asociado un desplazamiento, necesitamos crear dos ecuaciones para
cada elemento. Estas ecuaciones deben involucrar a los desplazamientos
nodales y a la rigidez del elemento. Considérese las fuerzas transmitidas
internamente if y 1+if y los desplazamientos extremos iu y 1+iu de un
elemento, las cuales se muestran en la Figura 2.36.
u i+1
1unodo i
nodo i+1y
oynodo i+1
nodo i
u i+1
1u
(a) (b)
f = k (u - u )i eq i+1 i
i+1ieqif = k (u - u )
f = k (u - u )i+1 eq ii+1ii+1eqi+1f = k (u - u )
Figura 2.36.- Fuerzas transmitidas internamente a través de un elemento arbitrario.
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________139
Las condiciones de equilibrio estático requieren que la suma de if y 1+if sea
cero. Nótese que la suma antes mencionada es cero sin importar cual de los
diagramas de la Figura 2.36 es seleccionado. Sin embargo, para ser
consistentes, usaremos el mostrado en la Figura 2.36(b), de tal manera que if
y 1+if están dirigidas en el sentido positivo del eje y . Luego, escribimos las
fuerzas transmitidas en los nodos i e 1+i como sigue:
( )1+−= iieqi uukf
(2.105)
( )iieqi uukf −= ++ 11
La ecuación (2.105) puede ser expresada en forma matricial por
−
−=
++ 11 i
i
eqeq
eqeq
i
i
uu
kkkk
ff
(2.106)
4. Ensamble de los elementos para presentar el problema completo.
Aplicando la descripción elemental dada por (2.106) a todos los elementos y
ensamblándolos llegamos a la matriz de rigidez global. La matriz de rigidez
para el elemento (1) es dada por
[ ]( )
−
−=
11
111
kkkk
K
y su posición en la matriz de rigidez global está dada por

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________140
[ ]( )
−
−
=
5
4
3
2
1
11
11
1
000000000000000000000
uuuuu
kkkk
GK
La matriz de desplazamientos nodales se muestra a un lado de la posición del
elemento (1) en la matriz de rigidez global para ayudar a observar la
contribución de un nodo a sus elementos vecinos. Similarmente, para los
elementos (2), (3) y (4), obtenemos las matrices de rigidez elemental y su
posición en la matriz de rigidez global indicadas a continuación
[ ]( )
−
−=
22
222
kkkk
K [ ]( )
−−
=
5
4
3
2
1
22
222
000000000000000000000
uuuuu
kkkk
GK
[ ]( )
−
−=
33
333
kkkk
K [ ]( )
−−=
5
4
3
2
1
33
333
000000000000000000000
uuuuu
kkkkGK
[ ]( )
−
−=
44
444
kkkk
K [ ]( )
−−
=
5
4
3
2
1
44
44
4
000000
000000000000000
uuuuu
kkkk
GK
La matriz de rigidez global final es obtenida ensamblando, o sumando, las
matrices de rigidez elementales.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________141
[ ]( ) [ ]( ) [ ]( ) [ ]( ) [ ]( )GGGGG 4321 KKKKK +++=
[ ]( )
−−+−
−+−−+−
−
=
44
4433
3322
2211
11
00000
0000000
kkkkkk
kkkkkkkk
kk
GK (2.107)
Note que la matriz de rigidez global obtenida usando descripción elemental,
dada por (2.107), es idéntica a la matriz de rigidez global obtenida desde el
análisis de los diagramas de cuerpo libre de los nodos.
5. Aplicando condiciones de frontera y cargas.
La barra está fija en la parte superior, lo cual conduce a la condición de frontera
01 =u . La carga externa P es aplicada en el nodo 5. Aplicando estas
condiciones llegamos al conjunto de ecuaciones lineales siguiente:
=
−−+−
−+−−+−
Puuuu
kkkkkk
kkkkkkkk
00000
00000
000000001
5
4
3
2
44
4433
3322
2211
(2.108)
Nuevamente, debido a la condición de frontera, 01 =u , el primer renglón debe
contener un 1 seguido por cuatro ceros. También nótese que en problemas de
mecánica de sólidos, la formulación elemental finita conducirá siempre a la
formulación general siguiente:
[ ]{ } { }carga de matrizentosdesplazamidematrizrigidez de matriz =

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________142
Fase de Solución
6. Resolver simultáneamente un sistema de ecuaciones algebraicas.
Para obtener desplazamientos nodales numéricos, asumamos que E = 10.4 x
106 lb/in2 (aluminio), 1w = 2 in, 2w = 1 in, t = 0.125 in, L = 10 in, y P = 1000
lb. Mientras se sigue el proceso, es conveniente consultar la Tabla 2.1.
Tabla 2.1.- Propiedades de los elementos en el problema.
Elemento Nodos Área promedio de
la sección
transversal (in2)
Longitud
(in)
Módulo de
elasticidad
(lb/in2)
Coeficiente
de rigidez del
elemento
(lb/in)
1 1 2 0.234375 2.5 10.4 x 106 975 x 103
2 2 3 0.203125 2.5 10.4 x 106 845 x 103
3 3 4 0.171875 2.5 10.4 x 106 715 x 103
4 4 5 0.140625 2.5 10.4 x 106 585 x 103
La variación del área de la sección transversal de la barra en la dirección y
puede expresarse como:
( ) ( ) ( ) ( ) yytyL
wwwyA 0125.025.0125.0
1021
2121 −=
−+=
−+= (2.109)
Usando la ecuación (2.109), podemos calcular el área (en in2) de la sección
transversal en cada nodo:
A1 = 0.25 A2 = 0.25 – 0.0125(2.5) = 0.21875
A3 = 0.25 – 0.0125(5.0) = 0.1875 A4 = 0.25 – 0.0125(7.5) = 0.15625

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________143
A5 = 0.125
A continuación los coeficientes de rigidez equivalentes (en lb/in2) para cada
elemento se calculan desde las ecuaciones
( )l
EAAk ii
eq 21 +
= +
( )( )( )
( )9755.22
104.1025.021875.0 6
1 =+
=k x 310
( )( )( )
( )8455.22
104.1021875.01875.0 6
2 =+
=k x 310
( )( )( )
( )7155.22
104.101875.015625.0 6
3 =+
=k x 310
( )( )( )
( )5855.22
104.1015625.0125.0 6
4 =+
=k x 310
y las matrices elementales son
[ ]( )
−
−=
−
−−=
975975975975
10 3
11
111
kkkk
K
[ ]( )
−
−=
−
−=
845845845845
10 3
22
222
kkkk
K
[ ]( )
−
−=
−
−=
715715715715
10 3
33
333
kkkk
K

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________144
[ ]( )
−
−=
−
−=
585585585585
10 3
44
444
kkkk
K
Ensamblando las matrices elementales se obtiene la matriz de rigidez global:
[ ]( )
−−+−
−+−−+−
−
=
585585000585585715715000715715845845000845845975975000975975
10 3GK
Aplicando la condición de frontera 01 =u y la carga 1000=P lb, obtenemos
=
−−−
−−−−
35
4
3
23
1000000
58558500058513007150007151560845000845182097500001
10
uuuu
Debido a la condición de frontera 01 =u , sólo necesitamos resolver la matriz de
4x4 siguiente:
=
−−−
−−−
35
4
3
2
3
10000
585585005851300715007151560845008451820
10
uuuu
La solución de desplazamientos, en pulgadas, es:
1u = 0, 2u = 0.001026 3u = 0.002210 4u = 0.003608, y 5u = 0.005317

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________145
Fase de Posproceso
7. Discretización Obtención de otra información.
Para este problema podemos interesarnos en obtener otra información, tal
como el esfuerzo normal promedio en cada elemento. Estos valores pueden
determinarse desde la ecuación
( ) ( )
−=
−=
−== +
++
luu
EA
uul
EA
A
uuk
Af ii
promedio
iipromedio
promedio
iieq
promedio
11
1σ (2.110)
Puesto que los desplazamientos de los nodos son conocidos, la ecuación
(2.110) pudo haberse obtenido directamente desde la relación entre los
esfuerzos y las deformaciones,
−== +
luu
EE ii 1εσ (2.111)
Empleando la ecuación (2.111) podemos calcular el esfuerzo normal promedio
(en lb/in2) para cada elemento como
( ) ( ) ( )4268
5.20001026.0104.10 6
121 =−
=
−=
luu
Eσ
( ) ( ) ( )4925
5.2001026.0002210.0104.10 6
232 =−
=
−=
luu
Eσ
( ) ( ) ( )5816
5.2002210.0003608.0104.10 6
343 =−
=
−=
luu
Eσ

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________146
( ) ( ) ( )7109
5.2003608.0005317.0104.10 6
454 =−
=
−=
luu
Eσ
f=P
P
f=P
PP
Ly
Figura 2.37.- Fuerzas internas.
En la Figura 2.37, notamos que para este problema, sin importar a través de
que sección cortamos la barra, la fuerza interna en la sección es igual a 1000
lb. Obteniendo los esfuerzos normales promedio (en lb/in2) por otro camino,
( ) 4267234375.010001 ===
promedioAf
σ
( ) 4923203125.010002 ===
promedioAf
σ
( ) 5818171875.010003 ===
promedioAf
σ
( ) 7111140625.010004 ===
promedioAf
σ

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________147
Ignorando los errores obtenidos por redondeo de nuestras respuestas,
encontramos que estos resultados son idénticos a los esfuerzos normales
promedio para cada elemento calculado desde la información de los
desplazamientos. Esta comparación nos permite aseverar que el cálculo de
nuestros desplazamientos para este problema es bueno.
La fuerza de reacción puede ser calculada por diferentes caminos. Primero, en
referencia a la Figura 2.35, notamos que el equilibrio estático en el nodo 1
requiere
( ) ( ) ( ) 10000001026.010975 31211 =−=−= uukR lb
Como se recordará, podemos también calcular las fuerzas de reacción desde la
ecuación de reacción general
{ } [ ]{ } { }FuKR −= 0
{ } [ ]{ } { }carga de matrizentosdesplazami de matrizrigidez de matrizreacción de matriz −=
Debido a la simplicidad del problema, realmente no es necesario hacer
operaciones con matrices para calcular las fuerzas de reacción. Sin embargo,
como una demostración, el proceso se muestra a continuación. Desde la
ecuación general, obtenemos
−
−−−
−−−−
−
=
3
3
5
4
3
2
1
100000
005317.0003608.0002210.0001026.0
0
585585000585130071500071515608450008451820975000975975
10
RRRRR
donde 1R , 2R , 3R , 4R , y 5R representan las fuerzas de reacción de los nodos
correspondientes. Desde la operación matricial, obtenemos

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________148
−
=
0000
1000
5
4
3
2
1
RRRRR
El valor negativo de 1R significa simplemente que el sentido de la fuerza de
reacción es hacia arriba (porque asumimos que el sentido positivo del eje y es
hacia abajo). Por supuesto, como es de esperarse, el enfoque es el mismo que
en nuestros cálculos iniciales, porque los renglones de la matriz anterior
representan las condiciones de equilibrio estático en cada nodo.
2.7.6.- Formulación de Energía Potencial Total Mínima.
dy
dz
dxyσ
σy
z
y
x
lAEF = ( ) l = K y
F
(sin carga)elongar
longitud siny
yl
l
F
Figura 2.38.- Comportamiento elástico de un miembro sometido a una carga central.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________149
La formulación de energía potencial total mínima es una aproximación común
en la generación de modelos de elementos finitos en mecánica de sólidos. Las
cargas externas aplicadas a un cuerpo provocarán su deformación. Durante el
proceso, el trabajo hecho por la fuerza externa es almacenado en el material en
la forma de energía elástica, llamada energía de deformación. Considérese la
energía de deformación en un elemento sólido cuando está sujeto a una fuerza
central F , como muestra la Figura 2.38.
También se muestra en la Figura 2.38 un volumen diferencial de material del
miembro y el esfuerzo normal actuando en su superficie. Recientemente se
demostró que el comportamiento elástico del miembro puede ser modelado
como un resorte lineal. Cuando el miembro es elongado una cantidad
diferencial /dy , la energía almacenada en el material es
( ) //2/
0
//
0
/
21
21//
ykyykdykyFdydyy
====Λ ∫∫ (2.112)
Podemos escribir la ecuación (2.112) en función del esfuerzo normal y de la
deformación:
( ) dVdydxdzykyd y σεεσ21
21
21 // =
==Λ
Por lo tanto, para un miembro o un elemento sometido a carga axial, la energía
de deformación ( )eΛ es dada por
( ) ∫ ∫ ∫==Λ=ΛV V
e dVE
dVd22
2εσε (2.113)
donde V es el volumen del miembro. La energía potencial total Π para un
cuerpo compuesto de n elementos y m nodos es la diferencia entre la energía
de deformación total y el trabajo hecho por las fuerzas externas:

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________150
( ) ∑∑==
−Λ=Πm
iii
n
e
e uF11
(2.114)
El principio de la energía potencial total mínima establece simplemente que
para un sistema estable, el desplazamiento en la posición de equilibrio ocurre
de manera tal que el valor de la energía potencial total del sistema es un
mínimo.
( ) 011
=∂∂
−Λ∂∂
=∂
Π∂ ∑∑==
m
iii
i
n
e
e
ii
uFuuu
i = 1, 2, 3, ………., n (2.115)
Retornando nuestra atención al problema de la barra de sección transversal
variable, fija en uno de sus extremos y sometida a una carga axial en el otro.
Minimizando la energía de deformación con respecto a iu y 1+iu llegamos a
( )
( )1+−=∂Λ∂
iipromedio
i
e
uul
EA
u (2.116a)
( )
( )iipromedio
i
e
uul
EA
u−=
∂Λ∂
++
11
(2.116b)
y en forma matricial,
( )
( )
−
−=
∂Λ∂∂Λ∂
+
+
1
1
i
i
eqeq
eqeq
i
ei
e
uu
kkkk
u
u (2.117)
donde ( )
l
EAk promedio
eq = . Minimizando el trabajo hecho por las fuerzas externas
en los nodos i e 1+i de un elemento arbitrario ( )e , obtenemos

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________151
( ) iiii
FuFu
=∂∂
(2.118)
( ) 1111
++++
=∂
∂iii
i
FuFu
Para el problema, la formulación de la energía potencial total mínima conduce a
una matriz de rigidez global que es idéntica a la obtenida desde la formulación
directa:
[ ]( )
−−+−
−+−−+−
−
=
44
4433
3322
2211
11
00000
0000000
kkkkkk
kkkkkkkk
kk
GK
Además, considerando las cargas y aplicando las condiciones de frontera,
obtenemos
=
−−+−
−+−−+−
Puuuuu
kkkkkk
kkkkkkkk
0000
00000
000000001
5
4
3
2
1
44
4433
3322
2211
(2.119)
Los desplazamientos resultantes serán idénticos a los obtenidos con
anterioridad desde el método directo.
2.7.7.- Formulación de Residuos Ponderados.
El método de residuos ponderados está basado en asumir una solución
aproximada para la ecuación diferencial gobernante. Ésta debe satisfacer las

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________152
condiciones iniciales y de frontera del problema dado. Debido a que dicha
solución no es exacta, su sustitución en la ecuación diferencial conducirá a
algunos errores residuales. Establecido simplemente, cada método residual
requiere desvanecer el error sobre algún intervalo seleccionado o en algunos
puntos. Para mostrar este concepto, retornaremos nuestra atención al
problema de la barra. La ecuación diferencial gobernante y las condiciones de
frontera correspondientes son las siguientes:
( ) 0=− Pdydu
EyA con ( ) 00 =u (2.120)
A continuación, necesitamos suponer una solución aproximada. Teniendo en
mente que la solución asumida debe satisfacer la condición de frontera,
elegimos
( ) 33
221 ycycycyu ++= (2.121)
donde 1c , 2c , y 3c son coeficientes desconocidos. La ecuación (2.121)
ciertamente satisface la condición de frontera ( ) 00 =u . La sustitución de la
solución propuesta, en la ecuación diferencial gobernante, ecuación (2.120),
produce la función de error R :
( ) R=−++
−+ PycycctEy
Lww
w 2321
121 32 (2.122)
Sustituyendo para los valores de 1w , 2w , L , t , y E , del problema y
simplificando, obtenemos
( )( ) ( ) 62321 10154.96320125.025.0 −−++−= ycyccy
ER

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________153
Método de colocación.- En el método de colocación la función error, o residual,
R es forzada a ser cero en tantos puntos como coeficientes incógnita haya.
Porque la solución asumida en este problema tiene tres coeficientes incógnita,
forzaremos a la función error para que sea cero en tres puntos. Para este
efecto, elegimos a 3/Ly = , 3/2Ly = , y Ly = :
( ) 0,3/
==Ly
ycR
( ) 010154.963
103
310
23
100125.025.0 6
2
321 =−
+
+
−= −cccR
( ) 0,3/2
== Ly
ycR
( ) 010154.96320
3320
2320
0125.025.0 62
321 =−
+
+
−= −cccR
( ) 0, ==Ly
ycR
( )[ ] ( ) ( )[ ] ( ) 010154.96103102100125.025.0 62321 =−++−= −cccR
Este procedimiento crea tres ecuaciones lineales que podemos resolver para
obtener los coeficientes 1c , 2c , y 3c :
( ) 6321 10539.461
3100
320 −=++ ccc
( ) 6321 10924.576
3400
340 −=++ ccc
( ) 6321 10232.76930020 −=++ ccc

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________154
La solución de las ecuaciones anteriores conduce a ( ) 61 100776.423 −=c ,
( ) 152 1061.21 −=c , y ( ) 6
3 10153848.1 −=c . La sustitución de los coeficientes en la
ecuación (2.121) conduce al perfil de desplazamientos aproximados:
( ) ( ) ( ) ( ) 362156 10153848.11061.21100776.423 yyyyu −−− ++= (2.123)
Método del subdominio.- En el método del subdominio, la integral de la función
de error sobre algunos subintervalos seleccionados es forzado a ser cero. El
número de subintervalos elegidos debe ser igual al de coeficientes
desconocidos. Luego, para nuestra solución asumida, tendremos tres
integrales:
∫ =30
0L
dyR
( )( ) ( )[ ]∫ =−++− −30
62321 010154.96320125.025.0
L
dyycyccy
∫ =32
3
0L
L dyR
(2.124)
( )( ) ( )[ ]∫ =−++− −32
3
62321 010154.96320125.025.0
L
L dyycyccy
∫ =L
L dy3
2 0R
( )( ) ( )[ ]∫ =−++− −LL dyycyccy
32
62321 010154.96320125.025.0

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________155
La integración de las ecuaciones (2.124) producen tres ecuaciones lineales que
se pueden resolver para obtener los coeficientes desconocidos 1c , 2c , y 3c :
( ) ( ) ( ) ( ) 6321
3 10513333.3201018519.84691358.21088889.763 −− =++ ccc
( ) ( ) ( ) ( ) 4321 1020513333.34537041.471728395.6625.0 −=++ ccc
( ) ( ) ( ) ( ) 4321 1020513333.3694444.1000246917.84861111.0 −=++ ccc
Al resolver las ecuaciones anteriores se obtiene ( ) 61 1035088.391 −=c ,
( ) 62 10075.6 −=c , y ( ) 9
3 1061092.809 −=c . La sustitución de los coeficientes en la
ecuación (2.121) conduce al perfil de desplazamientos aproximados:
( ) ( ) ( ) ( ) 39266 1061092.80910075.61035088.391 yyyyu −−− ++= (2.125)
Método de Galerkin.- El método de Galerkin requiere que el error sea ortogonal
a algunas funciones ponderadas iΦ , de acuerdo a la integral
0=Φ∫b
a i dyR i = 1, 2, …, N (2.126)
Las funciones ponderadas son elegidas como parte de la solución aproximada.
Debido a que hay tres incógnitas en la solución aproximada asumida para el
problema, necesitamos generar tres ecuaciones. Recordemos que la solución
asumida es ( ) 33
221 ycycycyu ++= ; luego, las funciones ponderadas
seleccionadas son y=Φ1 , 22 y=Φ , y 3
3 y=Φ . Esta selección conduce a las
ecuaciones siguientes:

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________156
( )( ) ( )[ ]∫ =−++− −Ldyycyccyy
0
62321 010154.96320125.025.0
( )( ) ( )[ ]∫ =−++− −Ldyycyccyy
0
62321
2 010154.96320125.025.0 (2.127)
( )( ) ( )[ ]∫ =−++− −Ldyycyccyy
0
62321
3 010154.96320125.025.0
La integración de las ecuaciones (2.127) producen tres ecuaciones lineales que
pueden resolverse para obtener los coeficientes desconocidos 1c , 2c , y 3c :
0048077.011251666667.104333333.8 321 =++ ccc
0320513333.08750750083333.52 321 =++ ccc
240385.057143.714283333.5833375 321 =++ ccc
Al resolver las ecuaciones anteriores obtenemos ( ) 61 10642.400 −=c ,
( ) 62 10006.4 −=c , y ( ) 6
3 10935.0 −=c . La sustitución de los coeficientes en la
ecuación (2.121) conduce al perfil de desplazamientos aproximado:
( ) ( ) ( ) ( ) 36266 10935.010006.410642.400 yyyyu −−− ++= (2.128)
Método de mínimos cuadrados.- El método de mínimos cuadrados requiere que
el error sea minimizado con respecto a los coeficientes desconocidos en la
solución asumida, de acuerdo a la relación
∫
b
adymínimo 2R

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________157
la cual conduce a
∫ =∂∂b
ady
c0
1
RR i = 1, 2, …, N (2.129)
Debido a que hay tres incógnitas en la solución aproximada del problema, la
ecuación (2.129) genera tres ecuaciones. Recordemos que la función de error
es
( )( ) ( ) 62321 10154.96320125.025.0 −−++−= ycyccy
ER
Diferenciando la función de error con respecto a 1c , 2c , y 3c y sustituyendo en
la ecuación (2.129), obtenemos:
( )( ) ( )[ ]( )∫ =−−++− −10
0
62321 00125.025.010154.96320125.025.0 dyyycyccy
( )( ) ( )[ ]( )∫ =−−++− −10
0
62321 020125.025.010154.96320125.025.0 ydyyycyccy
( )( ) ( )[ ]( )∫ =−−++− −10
0
262321 030125.025.010154.96320125.025.0 dyyyycyccy
La integración de las ecuaciones anteriores produce tres ecuaciones lineales
que podemos resolver para obtener los coeficientes incógnita 1c , 2c , y 3c :
000180289.025864583333.2364583333.0 321 =++ ccc
001602567.075.343333333.33864583333.2 321 =++ ccc
015024063.0928571.388375.34325 321 =++ ccc
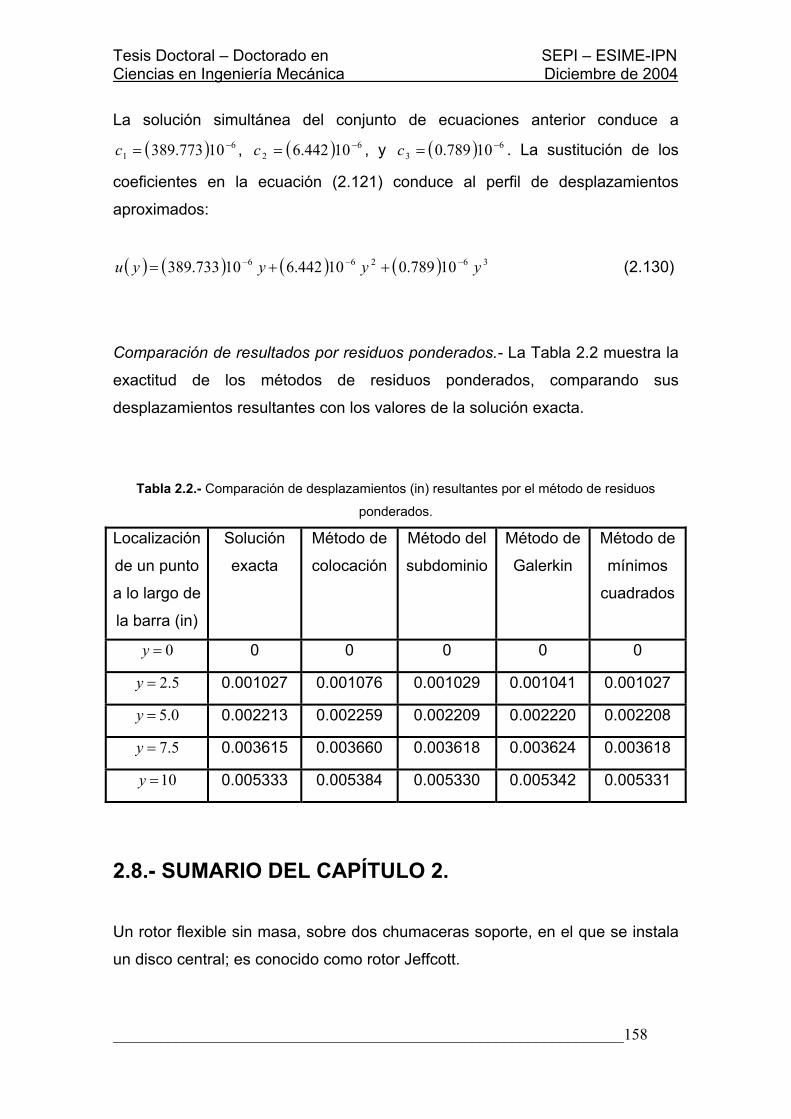
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________158
La solución simultánea del conjunto de ecuaciones anterior conduce a
( ) 61 10773.389 −=c , ( ) 6
2 10442.6 −=c , y ( ) 63 10789.0 −=c . La sustitución de los
coeficientes en la ecuación (2.121) conduce al perfil de desplazamientos
aproximados:
( ) ( ) ( ) ( ) 36266 10789.010442.610733.389 yyyyu −−− ++= (2.130)
Comparación de resultados por residuos ponderados.- La Tabla 2.2 muestra la
exactitud de los métodos de residuos ponderados, comparando sus
desplazamientos resultantes con los valores de la solución exacta.
Tabla 2.2.- Comparación de desplazamientos (in) resultantes por el método de residuos
ponderados.
Localización
de un punto
a lo largo de
la barra (in)
Solución
exacta
Método de
colocación
Método del
subdominio
Método de
Galerkin
Método de
mínimos
cuadrados
0=y 0 0 0 0 0
5.2=y 0.001027 0.001076 0.001029 0.001041 0.001027
0.5=y 0.002213 0.002259 0.002209 0.002220 0.002208
5.7=y 0.003615 0.003660 0.003618 0.003624 0.003618
10=y 0.005333 0.005384 0.005330 0.005342 0.005331
2.8.- SUMARIO DEL CAPÍTULO 2.
Un rotor flexible sin masa, sobre dos chumaceras soporte, en el que se instala
un disco central; es conocido como rotor Jeffcott.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________159
Si las chumaceras soporte son rígidas, el desbalance se debe a la
excentricidad de masa q y a la flecha s del rotor. Si además, la flecha del rotor
es cero (caso 1), para amortiguamientos pequeños y operación cercana a la
velocidad crítica, el factor de amplificación del volteo es muy grande; se hace
infinito, si el amortiguamiento es nulo y la razón de velocidad es unitaria. A la
velocidad crítica, el ángulo de fase es igual a 90 grados. A muy alta velocidad,
el factor de amplificación del volteo se aproxima a la unidad y el ángulo de fase
se aproxima a 180 grados. Los valores pico del factor de amplificación del
volteo ocurren cuando la razón de velocidad es igual al inverso de la raíz
cuadrada de la diferencia entre la unidad y el doble de la razón de
amortiguamiento.
Si las chumaceras soporte son rígidas, el desbalance se debe a la
excentricidad de masa q y a la flecha s del rotor. Si además el centro de masa
coincide con el centro geométrico (caso 2), cuando la razón de velocidad se
aproxima a cero, el factor de amplificación del volteo tiende a cero para el caso
1 y a la unidad para el caso 2. Para razones de velocidad muy altas el factor de
amplificación del volteo se aproxima a la unidad para el caso 1 y a cero para el
caso dos.
Si las chumaceras soporte son flexibles, se derivan dos importantes conceptos:
(1) Para cualquier valor constante de la razón de amortiguamiento, hay un
dramático aumento en el factor de amplificación del volteo al aumentar la razón
de rigidez. (2) Para cualquier valor asignado de la razón de rigidez, un valor
mínimo del factor de amplificación del volteo ocurre en algún nivel intermedio
de la razón de amortiguamiento. Adicionalmente, para razón de rigidez cero,
con un incremento en la razón de amortiguamiento, el valor pico del factor de
amplificación del volteo disminuye a la unidad cuando la razón de
amortiguamiento es igual a la raíz de 2, mientras la razón de velocidad
correspondiente se incrementa desde la unidad a un valor infinito,
manteniéndose en infinito para razones de amortiguamiento mayores a la raíz
de 2.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________160
Típicamente un estator montado sobre un pedestal rígido tendrá una mayor
rigidez en la dirección vertical que en la horizontal. La velocidad crítica
correspondiente al pico de amplitud será mayor para el eje del estator con
mayor rigidez. Como consecuencia de las diferentes amplitudes de vibración
horizontal y vertical a cualquier velocidad de rotación, la orbita de deflexión del
rotor no será circular –elongada en la dirección horizontal cuando pasa a través
de la velocidad crítica horizontal y alongada en la dirección vertical cuando
pasa a través de la velocidad crítica vertical.
Cuando un rotor voltea en una orbita circular sincronizadamente con la
velocidad de rotación y en el mismo sentido que la rotación, se mueve como un
cuerpo con deflexión congelada en el marco de coordenadas del rotor. Esto
significa que los esfuerzos elásticos internos en el rotor son constantes, es
decir, las fibras del rotor no experimentan esfuerzos vibratorios y por lo tanto no
están sujetos a fatiga como consecuencia de la vibración forzada debida al
desbalance. Sin embargo cuando un rotor voltea con una orbita elíptica, sufrirá
dos deflexiones máximas y dos deflexiones mínimas en cada revolución, y por
lo tanto las fibras del rotor experimentarán esfuerzos de vibración a una
frecuencia doble de la velocidad de rotación. Debe tenerse mucho cuidado para
que estos esfuerzos vibratorios estén muy por abajo del límite de fatiga del
material del rotor.
Además, para el rotor Jeffcott, el ángulo de fase de la respuesta con respecto
al desbalance varía como una función de la velocidad de rotación. A
velocidades subcríticas bajas, las deflexiones vibratorias están en fase una con
otra. A la velocidad crítica, la deflexión y el desbalance estarán defasadas 90
grados. A velocidades supercríticas altas la deflexión y el desbalance estarán
defasadas 180 grados. Mientras las velocidades críticas vertical y horizontal
sean idénticas, el cambio de fase será idéntico a cualquier velocidad. Pero con
anisotropía en el estator, las velocidades críticas y por lo tanto el cambio de
fase para los dos ejes diferirán a cualquier velocidad de rotación, y de manera
particular en el rango de velocidades entre las dos velocidades críticas. Si la

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________161
diferencia entre los ángulos de fase de las vibraciones en los dos ejes a
cualquier velocidad de rotación es baja, el efecto es que los ejes mayor y
menor de la orbita se inclinen alejándose de los ejes elásticos principales del
estator. Si la diferencia entre los ángulos de fase es igual a 90 grados,
entonces la orbita es un movimiento elíptico degenerado. Si la diferencia entre
los ángulos de fase es mayor de 90 grados, el movimiento de volteo es en una
dirección opuesta al de rotación del rotor (es decir, el movimiento es backward),
como se indica en la orbita central mostrada en la Figura 2.9. Esto no tiene
mayores consecuencias prácticas pero en el diseño es razonable asegurarse
que la vibración forzada debida al desbalance implique siempre movimiento de
volteo en una dirección igual al de rotación del rotor (es decir, movimiento
forward).
Para vibración angular, Cuando la velocidad de rotación ω se incrementa, la
frecuencia natural del modo de volteo forward, fp , crece y se aproxima
asintóticamente a la línea recta ( )IIp p /ω= . Mientras que, el valor absoluto de
la frecuencia natural del modo de volteo backward, bp , decrece y tiende acero.
Hay resonancias en el punto de cruce de la línea ω=p y la curva fp .
Con momento giroscópico, un par es aplicado al rotor; para que dicho par
tienda a centrar al rotor es necesario que el momento de inercia sea menor al
momento polar de inercia. Dicho de otra manera, el disco instalado en el rotor
no debe tender a ser un cilindro, longitud menor o igual a su diámetro
multiplicado por la raíz de tres medios.
Desde el análisis de vibraciones no lineales, la curva de resonancia es tipo
resorte duro cuando los coeficientes de términos no lineales simétricos son
menor que cero y es tipo resorte suave cuando son mayores que cero. La
condición de inestabilidad se produce cuando la amplitud es menor; para
evitarla, el ángulo de fase debe ser mayor de 90 grados para velocidades
supercríticas y menor a 90 grados para velocidades subcríticas.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________162
Un rotor simétrico sin fractura tiene resonancia sólo en la velocidad crítica
principal; sin embargo, un rotor fracturado tiene las resonancias siguientes:
• Oscilación inestable en la velocidad crítica principal, dependiendo de la
ubicación del desbalance.
• Resonancia armónica de un modo de volteo backward [ ]ω− .
• Resonancias superarmónicas de un modo de volteo forward [ ]ω2+ y
[ ]ω3+ .
• Resonancia subarmónica de un modo de volteo forward ( )[ ]ω21/+ .
• Resonancia súper-subarmónica de un modo de volteo forward
( )[ ]ω23 /+ .
• Combinación de resonancias [ ]bf pp − .
A través de estos cambios de resonancias y, dependiendo de la dirección y
magnitud del desbalance, es posible detectar la ocurrencia de una fractura si
ponemos atención a estas resonancias.
Para ecuaciones de movimiento considerando
• Rotor asimétrico con diferencia direccional en su rigidez.
• Rotación no lineal.
• Acción de un desbalance.
características que un rotor fracturado tiene simultaneamente, aparecen
fenómenos únicos.
Las curvas de resonancia con un desbalance comparativamente grande
cambian significativamente, dependiendo de la dirección del desbalance.
Cuando está localizado en el mismo lado de la fractura, las curvas de
resonancia exhiben una región de gran amplitud y, como resultado, aparece
una zona inestable. Por el lado contrario, cuando el desbalance está de lado
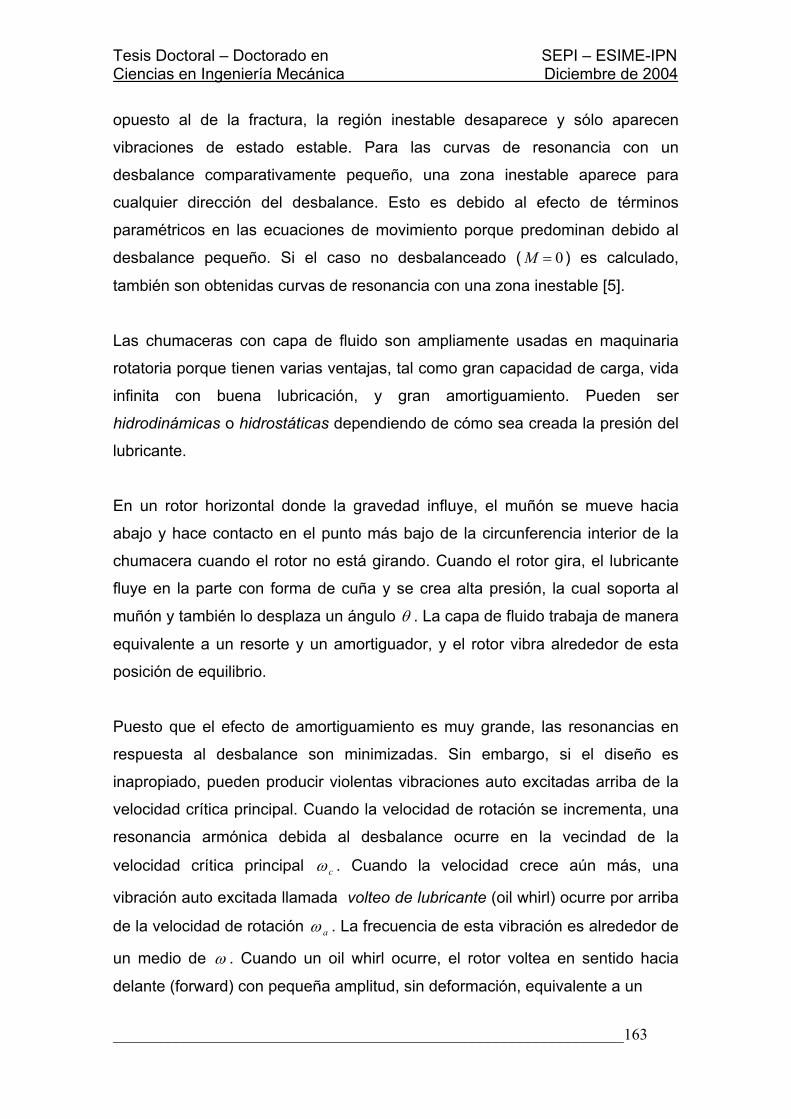
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________163
opuesto al de la fractura, la región inestable desaparece y sólo aparecen
vibraciones de estado estable. Para las curvas de resonancia con un
desbalance comparativamente pequeño, una zona inestable aparece para
cualquier dirección del desbalance. Esto es debido al efecto de términos
paramétricos en las ecuaciones de movimiento porque predominan debido al
desbalance pequeño. Si el caso no desbalanceado ( 0=M ) es calculado,
también son obtenidas curvas de resonancia con una zona inestable [5].
Las chumaceras con capa de fluido son ampliamente usadas en maquinaria
rotatoria porque tienen varias ventajas, tal como gran capacidad de carga, vida
infinita con buena lubricación, y gran amortiguamiento. Pueden ser
hidrodinámicas o hidrostáticas dependiendo de cómo sea creada la presión del
lubricante.
En un rotor horizontal donde la gravedad influye, el muñón se mueve hacia
abajo y hace contacto en el punto más bajo de la circunferencia interior de la
chumacera cuando el rotor no está girando. Cuando el rotor gira, el lubricante
fluye en la parte con forma de cuña y se crea alta presión, la cual soporta al
muñón y también lo desplaza un ángulo θ . La capa de fluido trabaja de manera
equivalente a un resorte y un amortiguador, y el rotor vibra alrededor de esta
posición de equilibrio.
Puesto que el efecto de amortiguamiento es muy grande, las resonancias en
respuesta al desbalance son minimizadas. Sin embargo, si el diseño es
inapropiado, pueden producir violentas vibraciones auto excitadas arriba de la
velocidad crítica principal. Cuando la velocidad de rotación se incrementa, una
resonancia armónica debida al desbalance ocurre en la vecindad de la
velocidad crítica principal cω . Cuando la velocidad crece aún más, una
vibración auto excitada llamada volteo de lubricante (oil whirl) ocurre por arriba
de la velocidad de rotación aω . La frecuencia de esta vibración es alrededor de
un medio de ω . Cuando un oil whirl ocurre, el rotor voltea en sentido hacia
delante (forward) con pequeña amplitud, sin deformación, equivalente a un

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________164
rotor rígido. Muszynska [8] reportó que la frecuencia real es ligeramente más
pequeña que la velocidad de rotación, aún cuando este valor varia
dependiendo del tipo de chumacera y excentricidad estática. El umbral de
velocidad aω algunas veces es menor que la velocidad crítica principal.
Cuando la velocidad de rotación crece aún más, una vibración violenta auto
excitada inicia en alrededor de dos veces la velocidad crítica principal y persiste
en un amplio rango de velocidad por arriba de la mencionada anteriormente.
Esta vibración es llamada movimiento circular de vaivén del lubricante (oil
whip). La frecuencia de un oil whip es aproximadamente igual a una frecuencia
natural del sistema. Al acelerar el rotor, algunas veces no aparece, aún si la
velocidad excede el doble de la velocidad crítica principal; sin embargo, una
vez que ocurre, no desaparece a menos que la velocidad se reduzca a un valor
menor al doble de la velocidad crítica principal. Como resultado se tiene el
fenómeno de histéresis llamado efecto inercial.
Conociendo la distribución de presión sobre el muñón, podemos obtener la
fuerza de reacción, debida al lubricante. Si la condición de Gumbel es
adoptada, para chumaceras cortas dicha fuerza de reacción es la suma de las
componentes siguientes:
( )( )
( )
−
++
−
+
=2/52
2
22
232
1
21
1
22
21
k
kk
k
k
Rl
cR
N
..
πθω
µ (2.89a)
( ) ( )
−+
−
+
=222/32
32
1
4
12
2
21
k
kk
k
k
Rl
cR
T.
.θωπ
µ (2.89b)
Para chumaceras largas, y la misma condición, las componentes son:

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________165
( )( ) ( ) ( )
+−
−+
−+
−
=22/3222
22
28
21
212
226
kk
kkk
kRl
cR
Nπ
πθω
µ.
.
(2.90a)
( )( ) ( )( )
−++
−+
−
=2/1222/122
2
12
4
12
26
kk
kk
kk
kRl
cR
T.
.θωπ
µ (2.90b)
Cuando un rotor gira, las fuerzas de la capa de lubricante son generadas y el
muñón flota. La posición de equilibrio ( )00 ,θkO j del centro del muñón está
determinada por el balance entre la carga de gravedad 0F actuando hacia
abajo y la fuerza de la capa de lubricante ( )00 ,TN . El resultado muestra que la
posición de equilibrio está determinada por la cantidad adimensional, llamada
número de Sommerfeld:
mpn
cR
Sµ2
= (2.91)
donde n , en revoluciones por segundo, es la velocidad de rotación y
( ) ( )RlFp m 20 /= es la presión promedio en el muñón. Esto significa que aún si
la velocidad de rotación y la viscosidad del lubricante cambian, la posición de
equilibrio no cambia si el número de Sommerfeld es el mismo. Cuando el rotor
no está girando (es decir, 0=S ), el muñón está en la parte más baja de la
chumacera. Cuando la velocidad de rotación crece (es decir, cuando S crece),
el centro del muñón flota y cambia su posición a lo largo de la circunferencia y
llega al centro de la chumacera cuando la velocidad de rotación se hace
extremadamente alta ( ∞=S ).

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________166
Referencias del capítulo 2.
[1] Myklestad, N. O., Fundamentals of Vibration Analysis, Mc Graw-Hill, New
York, 1956.
[2] Yamamoto, T., Ishida, Y. y Kawasumi, J., Oscillations of a rotating shaft with
symmetrical nonlinear spring characteristics, Bull. JSME, Vol. 18, No. 123,
1977, pp965-975.
[3] Yamamoto, T. y Ota, H., Unstable vibrations of the shaft carrying an
unsymmetrical rotating body, Bull. JSME, Vol. 6, No. 23, 1963, pp.404-411.
[4] Dimarogonas, A. D. y Paipetis, S. A., Analytical Methods in Rotor Dynamics,
Applied Science Publishers, Parking, Essex, England, 1983.
[5] Ishida, Y., Yamamoto, T. y Hirokawa, I., Vibrations of a rotating shaft
containing a transverse crack (a major critical speed of a horizontal shaft),
Proceedings of the 4th International Conference on Rotor Dynamics, 1994,
pp.47-52.
[6] Gasch, R. Dynamic behavior of a simple rotor with a cross-sectional crack,
Proceedings of the International Conference on Vibrations in Rotating
Machinery, Institute of Mechanical Engineers, New York, 1976, pp.123-128.
[7] Henry, T. A. y Okah-Avae , B. E., Vibrations in cracked shaft, Proceedings of
the International Conference on Vibrations in Rotation Machinery, Institute of
Mechanical Engineers, New York, 1976, pp15-17.
[8] Muszynska, A. Tracking the mystery of oil whirl, Sound Vib., 1987, pp8-11.
[9] Newkirk, B. L. y Taylor, H. D., Shaft whirling due to oil action in journal
bearings, Gen. Electr. Rev., Vol. 28, No. 7, 1925, pp.559-568.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________167
[10] Hori, Y. A theoryof oil whip, Trans. ASME, J. Appl. Mech., Vol. 26, No. 2,
1959, pp.189-198.
[11] Funakawa, M. y Tatara, A., Stability criterion o fan elastic rotor in journal
bearings, Trans. JSME, Vol.30, No. 218, 1964, pp.1238-1244 (en japonés).
[12] Courant, R. Variational Methods for the Solution of Problems of Equilibrium
and Vibrations, Bulletin of the American Mathematical Society, Vol. 49,
Providence, RI, 1943, pp.1-23.
[13] Clough, R. W. The Finite Element Method in Plane Stress Analysis,
Proceedings of American Society of Civil Engineers, 2nd Conference on
Electronic Computations, Vol. 23, Pittsburgh, 1960, pp.345-378.
[14] Zienkiewicz, O. C., and Cheung, Y. K. K., The Finite Element Method in
Structural and Continuoum Mechanics, McGraw-Hill, London, 1967.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________168

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________169
3.- ANÁLISIS GEOMÉTRICO Y MECÁNICO.
En este capítulo se analiza el campo de presión del lubricante, y su efecto
sobre el muñón de un árbol cuyo eje está desalineado respecto al eje de su
chumacera. También se analiza la respuesta de un árbol sobre chumaceras
rígidas, fracturado y desbalanceado.
3.1.- ANÁLISIS DEL DESALINEAMIENTO ENTRE ÁRBOL Y CHUMACERAS7.
O
a)
J
b)
θ
Figura 3.1.- Árbol-chumacera: (a) ejes longitudinales colineales; (b) Ejes longitudinales
paralelos.
Si se considera colineales los ejes longitudinales de árbol y chumaceras (ver
Figura 3.1a), el espesor normalizado ( h ) de la capa de lubricante es expresado
como
7 Nossov, R. V., Gómez, M. J. C., Jiménez, R. H., Campo de presión de lubricante en chumaceras desalineadas de máquinas rotatorias, Sexto Congreso Nacional de Ingeniería Electromecánica y de Sistemas, SEPI – ESIME, México D. F., noviembre de 2001, pp.276-280.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________170
1==rC
Hh (3.1)
donde H es el espesor de la capa de lubricante, y rC es el claro radial entre
árbol y chumacera con sus ejes longitudinales colineales.
El caso expresado por (3.1) es ideal, nunca ocurrirá, debido a:
• Flexión, por carga térmica y mecánica, en el árbol.
• Flexión por carga mecánica, en las chumaceras.
• Ensamble con desalineamiento entre árbol, chumaceras, y coples.
Al considerar paralelos a los ejes longitudinales de árbol y chumaceras (ver
Figura 3.1b), h variará de ε+1 a ε−1 para πθ ≤≤0 , donde la excentricidad
normalizada ε es la excentricidad ( =E distancia de O a J) entre rC . El espesor
normalizado de la capa de lubricante se puede expresar como
θε cos1+=h (3.2)
La ecuación (3.1) restringe fuertemente su capacidad de modelar
adecuadamente la realidad, debido a que es imposible evitar el
desalineamiento angular.
3.1.1.- Modelo Matemático del Sistema Árbol-Chumacera, con sus ejes longitudinales desalineados.
Para un modelo matemático más realista, considérense las Figuras 3.2, 3.3,
3.4, 3.5, y 3.6.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________171
Figura 3.2.- Eje del árbol excéntrico con respecto al eje de la
chumacera, y girado alrededor de 1y .
Sea J un punto sobre el eje del árbol, en la sección transversal media de la
chumacera; y O el punto en la parte media del eje de la chumacera; ambos en
el plano XY. Considérese (ver Figura 3.4) los sistemas de coordenadas
siguientes:
1. El sistema (X, Y, Z) ubicado en O; con Z y Y coincidiendo con el eje de
la chumacera y con la gravedad, respectivamente.
2. El sistema ( 1x , 1y , 1z ) paralelo al 1 y ubicado en J.
3. El sistema ( r , θ , Z) con origen en O y donde r y θ son las
coordenadas polares en la sección transversal media de la chumacera.
El ángulo θ es medido desde la dirección de máxima distancia entre
árbol y chumacera.
4. El sistema ( 2x , 2y , 2z ) con el origen en J, es obtenido al girar ( 1x , 1y ,
1z ) un ángulo α alrededor de 1y .
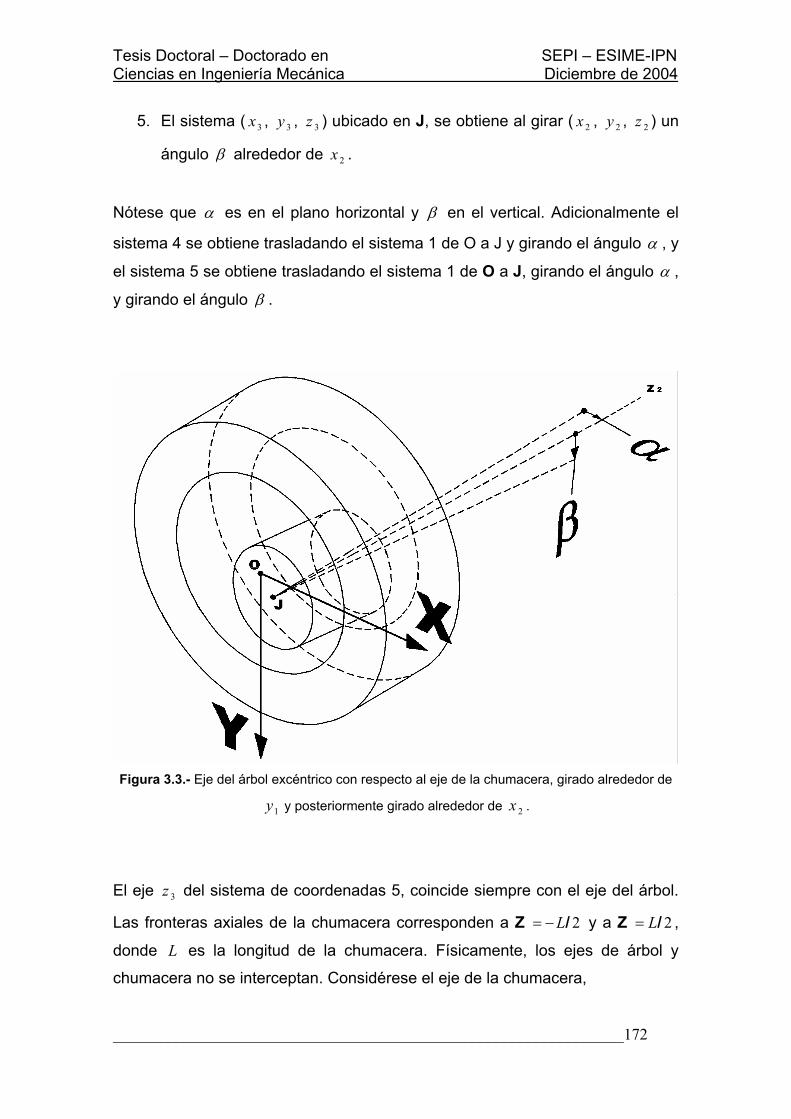
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________172
5. El sistema ( 3x , 3y , 3z ) ubicado en J, se obtiene al girar ( 2x , 2y , 2z ) un
ángulo β alrededor de 2x .
Nótese que α es en el plano horizontal y β en el vertical. Adicionalmente el
sistema 4 se obtiene trasladando el sistema 1 de O a J y girando el ángulo α , y
el sistema 5 se obtiene trasladando el sistema 1 de O a J, girando el ángulo α ,
y girando el ángulo β .
Figura 3.3.- Eje del árbol excéntrico con respecto al eje de la chumacera, girado alrededor de
1y y posteriormente girado alrededor de 2x .
El eje 3z del sistema de coordenadas 5, coincide siempre con el eje del árbol.
Las fronteras axiales de la chumacera corresponden a Z 2/L−= y a Z 2/L= ,
donde L es la longitud de la chumacera. Físicamente, los ejes de árbol y
chumacera no se interceptan. Considérese el eje de la chumacera,

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________173
perpendicular al plano XY, descrito por las ecuaciones X = 0, y Y = 0. Si las
coordenadas de J son la excentricidad en X para Z = 0, ( )0xE , y la
excentricidad en Y para Z = 0, ( )0yE , el eje del árbol es una línea recta en el
espacio, pasando por J, representada por las ecuaciones:
xE (Z) = Z ( )0tan xE+α (3.3)
yE (Z) = Z ( )0tan yE+β (3.4)
donde α y β son valores pequeños.
Figura 3.4.- Eje del árbol, excéntrico con respecto al eje de la chumacera, girado alrededor de
1y , y posteriormente girado alrededor de 2x ; representación unifilar.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________174
En la Figura 3.5, la distancia OA es igual a la excentricidad en X cuando Z = 0,
( )0xE , la distancia AJ es igual a la excentricidad en Y cuando Z = 0, ( )0yE .
De la misma figura se obtienen las relaciones siguientes:
( ) ( ) ( )000 222yx EEE += (3.5)
( ) ( ) ( )000 γsenEE x = (3.6)
( ) ( ) ( )0cos00 γEE y = (3.7)
( ) ( )( )00
0tany
x
EE
=γ (3.8)
La excentricidad local E (Z) en el plano Z 0≠ , para ≤−2L
Z 2L
≤ , es igual a
E (Z) ( ) ( ) ( )[ ] ( )[ ]22 0tan0tan yx EEEE +++=+= βα ZZZZ 2y
2x (3.9)
Las funciones trigonométricas del ángulo local ( )Zγ en el plano Z 0≠ , para
22 /Z/ LL ≤≤− , son:
( ) ( )( )0tan0tan
tany
x
EE
+
+=
βα
γZZ
Z (3.10)
( )( )
( )ZZ
ZE
E y=γcos (3.11)
( ) ( )( )ZZ
ZE
Esen x=γ (3.12)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________175
Figura 3.5.- Eje del árbol, excéntrico con respecto al eje de la chumacera, girado alrededor de
1y , y posteriormente girado alrededor de 2x ; representación unificar; detalles para Z igual a
cero y para Z distinto de cero.
La restricción impuesta por la geometría de la chumacera, al movimiento del
árbol, implica una excentricidad máxima menor o igual a rC
rCL
E ≤
−2
(3.13a)
rCL
E ≤
2 (3.13b)
( ) ( ) ryx CEL
EL
≤
+
−+
+
−22
0tan2
0tan2
βα (3.14a)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________176
( ) ( ) ryx CEL
EL
≤
+
+
+
22
0tan2
0tan2
βα (3.14b)
En el caso límite ( ) 00 =xE , y ( ) 00 =yE se obtiene un valor máximo de los
ángulos α y β .
( ) ( ) rCL
≤+ 22 tantan2
βα (3.15)
( ) ( )LD
RC
LC rr =≤+
2tantan 22 βα (3.16)
donde D y R son, el diámetro y el radio interiores, respectivamente, de la
chumacera.
En la práctica, la mayoría de las chumaceras cumplen con las desigualdades
siguientes:
5.01.0 ≤≤DL
(3.17)
002.0001.0 ≤≤R
C r (3.18)
Para el valor mínimo de R
C r (0.001), la desigualdad (3.17) es equivalente a
rr CLC 1000200 ≤≤ (3.19)
Además, para las chumaceras más cortas, 1.0=DL/ , de la desigualdad (3.16)
se obtiene

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________177
( ) ( ) ( ) 01.010001.0tantantan 22 =≤=+ γβα (3.20)
La excentricidad normalizada ( )Zε es igual a
( ) ( ) ( ) ( )ZZZ
Z 221yx
rr
EECC
E+==ε (3.21)
( ) ( )[ ] ( )[ ]22 0tan0tan yx EEE +++= βα ZZZ (3.22)
El espesor de la capa de lubricante depende de la coordenada axial Z, y del
ángulo θ
( ) ( ) ( ) ( )[ ]0costan,tan,tan,tan, γγθβαβαθ +−+= ZECH r (3.23)
Nikolakopoulos y Papadopoulos [1], usaron para el espesor de la capa de
lubricante la expresión
( ) ( ) ( ) ( )[ ]00coscos01, ϕθψϕθψθεθ +++++= senh xyZZ
La cual es similar a nuestra expresión (3.23). La principal diferencia consiste en
la expresión utilizada para los parámetros de desalineamiento y también en que
nuestra [2] expresión es una función no lineal de Z.
La desigualdad (3.20) debe cumplirse, tanto en condiciones estáticas como en
condiciones dinámicas. Considérese la condición estática de la viga sometida a
una carga concentrada al centro (peso del disco igual a W ) y a una carga
uniformemente distribuida debida al propio peso del árbol ( q ). Por resistencia
de materiales
( ) ( )48
2324 243 xlqlWqxxWqlEIy
+−−+= (3.24)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________178
En la que E es el módulo de elasticidad, I es el momento de inercia de la
sección transversal con respecto a un eje contenido en su plano neutro, l es la
longitud de la viga, y y es su deflexión a una distancia x de su extremo
izquierdo.
Derivando (3.24) con respecto a x :
( ) ( )48
23812 232 lqlWqxxWqldxdy
EI+−−+
= (3.25)
Figura 3.6.- Árbol-chumacera-disco; con ejes de árbol (en su posición sin flexar) y chumacera
colineales con el eje Z, y con el eje del disco paralelo al eje Z.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________179
De las Figuras 3.3, 3.4, 3.5, y 3.6 se puede notar que si ( ) 00 =E , y 0=α ;
( ) βγ =Z ; por lo que, considerando la ecuación (3.20), la ecuación (3.25) se
puede escribir como
( ) ( )01.0arctan
4823812 232
≤+−−+
==EI
lqlWqxxWqldxdy
γ (3.26)
El peso del disco; el material, la sección transversal, y la densidad del árbol;
deberán ser tales que γ cumpla con la ecuación (3.26); teniendo un valor muy
por abajo del arco cuya tangente es 0.01; lo anterior para permitir su
incremento por fuerzas inerciales.
3.1.2.- Ecuación de Reynolds Para un Sistema Árbol-Chumacera con Ejes Desalineados.
Para un diseño de chumacera presurizada y controlable, se obtienen
expresiones que pueden ser usadas para reducir los problemas de amplitud de
vibración, adecuando la ubicación y la presión de inyección del lubricante.
La ecuación de Reynolds para posición de estado estable de árbol y
chumacera con ejes desalineados, y correspondiendo al espesor de capa de
lubricante dado por la ecuación (3.23), es la siguiente:
( )( ) ( ) ( )[ ]0
62
2323 γγθε
ωµθθ
+−−=
∂
∂
∂∂
+
∂
∂
∂∂ ZZ
ZZsen
C
rphr
ph
r
(3.27)
Aquí, p es el campo de presiones del lubricante en la chumacera, µ es la
viscosidad absoluta, r y ω son el radio y la velocidad angular del árbol. Los
ángulos ( )0γ , ( )Zγ están definidos por (3.8) y (3.10).

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________180
Como en la teoría clásica de chumaceras cortas de Ocvirk [3], suponemos que
el primer término en el lado izquierdo de la ecuación de Reynolds (3.27) puede
ser despreciado, y consideramos la ecuación de chumacera corta siguiente:
=
=
−
βαθβαθ
βαθ tan,tan,,tan,tan,,
tan,tan,,3-
-
-
-
-Z
Z
ZZ
Zf
d
pdh
d
d
( )
+
−
− 0tan,tan,tan,tan,6 γβαγθβαε
--ZZ sen (3.28)
En la ecuación (3.28)
µω
βαθβαθ
=
−
tan,tan,,tan,tan,,
-
-Z
Zp
p (3.29)
y rC
ZZ-
= (3.30)
son adimensionales.
Como condición de frontera para la ecuación (3.28) se usan las expresiones
clásicas
−==
−−
2,0
2,
lp
lp θθ (3.31)
con rC
Ll = (3.32)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________181
La ecuación (3.28), con las condiciones de frontera dadas por (3.31) es el
modelo para chumaceras cortas, con los ejes de árbol y chumaceras
desalineados.
3.1.3.- Solución de la Ecuación de Reynolds con Desalineamiento Angular.
La solución de (3.28) puede obtenerse por integración directa, pero este
camino es suficientemente complicado, puesto que el lado derecho es una
función complicada de Z. Primero desarrollaremos el lado derecho de la
ecuación en series de los parámetros αtan , βtan
( ) ( ) ( ){ }
++−=
βθαθθεβαθ tantan06tan,tan,, 21 ggsenf
--ZZ
( )βα 22 tantan ++ O (3.33)
donde:
( ) ( ) ( ) ( )[ ]00coscos01 γθθγθγθ +=+= sensenseng (3.34)
( ) ( ) ( ) ( )[ ]0cos00cos2 γθθγθγθ −=−= sensenseng (3.35)
( ) ( )r
xx C
E 00 =ε (3.36)
( )( )r
yy C
E 00 =ε (3.37)
( ) ( )rC
E 00 =ε (3.38)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________182
Integrando la ecuación (3.28) con respecto a la variable -Z con el lado derecho
expresado por (3.33), obtenemos
( )βαθβαθ
tan,tan,tan,tan,,
1Cd
dp=
-
-
Z
Z
( ) ( ) ( ){ }
+
+
− βθαθθεβαθ
tantan2
0tan,tan,,
621
2
3
ggsenh
-
-
-
ZZ
Z
(3.39)
Aquí, ( )βαθ tan,tan,1C es una constante de integración, no depende de -Z .
Expandamos ahora el lado derecho de (3.39) en series con respecto a los
parámetros αtan , βtan .
Integrando las series una vez con respecto a la variable -Z y usando las
condiciones de frontera impuestas para determinar las constantes de
integración, obtenemos la expresión final para la solución de la ecuación (3.28)
con las condiciones de frontera (3.31).
( )
−
=
=
−
22
0 2
tan,tan,,tan,tan,,
lg
pp
-
-
-Z
ZZ θ
µω
βαθβαθ
( ) ( )[ ] ( ) ( )[ ]2222
43 tantan2
tantan2 βαβθαθ ++
−
++ O
lgg
--ZZ (3.40)
en la que
( ) ( )( )[ ]30
cos0106
θε
θεθ
+=
seng (3.41)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________183
( ) ( ) ( ) ( )[ ]( )[ ]
( ) ( )[ ]( )[ ]443
cos01
005
cos01
0cos0cos0
θε
γθθε
θε
γθγεθ
+
−−
+
−+=
senseng (3.42)
( ) ( ) ( ) ( )[ ]( )[ ]
( ) ( )[ ]( )[ ]444
cos01
005
cos01
000
θε
γθθε
θε
γθγεθ
+
−+
+
−−−=
sensensenseng (3.43)
Remarquemos que ambos términos en las series (3.40) satisfacen las
condiciones de frontera (3.31) separadamente, debido a la apropiada elección
de las constantes de integración. En el campo de presiones, con
desalineamiento, expresado por (3.40), el primer término corresponde a la
solución clásica para las chumaceras cortas de Ocvirk. El segundo término en
(3.40), son las correcciones de primer orden ocasionadas por los parámetros
perturbadores αtan , βtan y que sin embargo producen cambios significativos
en la configuración del campo de presión total. La anterior aproximación,
permite una alta precisión tanto en el campo de presión, como en el cálculo de
las fuerzas y momentos resultantes. Es importante observar también que
pequeños ángulos de desalineamiento (que sin embargo son grandes
comparándolos con el pequeño claro) producen alteraciones significativas en el
campo de presión.
Al comparar las Figuras 3.7, 3.8, 3.9, y 3.10; se observa que sin
desalineamiento angular (ver Figura 3.7), la línea en que la presión del
lubricante es igual a cero es paralela al eje Z, para πθ = . Por otro lado, con
desalineamiento angular (ver Figura 3.8, 3.9, y 3.10), en la Figura 3.8 la línea
deja de ser paralela al eje Z, y ahora pasa aproximadamente por 5.2=θ (en Z
= l5.0 ), y por 5.3=θ (en Z = l5.0− ). Esta misma observación se acentúa aún
más en los casos de las Figura 3.9 y 3.10 en donde la excentricidad producida
por un alto número de Sommerfeld es menor en magnitud.
Como se puede anticipar, el campo de presión del lubricante generará fuerzas
y momentos, que a su vez influirán sobre el equilibrio del sistema, provocando
nuevos valores de la estabilidad dinámica.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________184
Figura 3.7.- Solución clásica de chumaceras cortas de Ocvirk. Aproximación de orden cero.
( ) 5.00 =ε , βα tan0tan == , 5.0=DL/ , y 1000=l .
Figura 3.8.- Campo de presión con un desalineamiento vertical moderado, en aproximación de
orden mayor a uno pero menor de dos. ( ) 5.00 =ε , 0tan =α , 0005.0tan =β , 5.0=DL/ , y
1000=l .
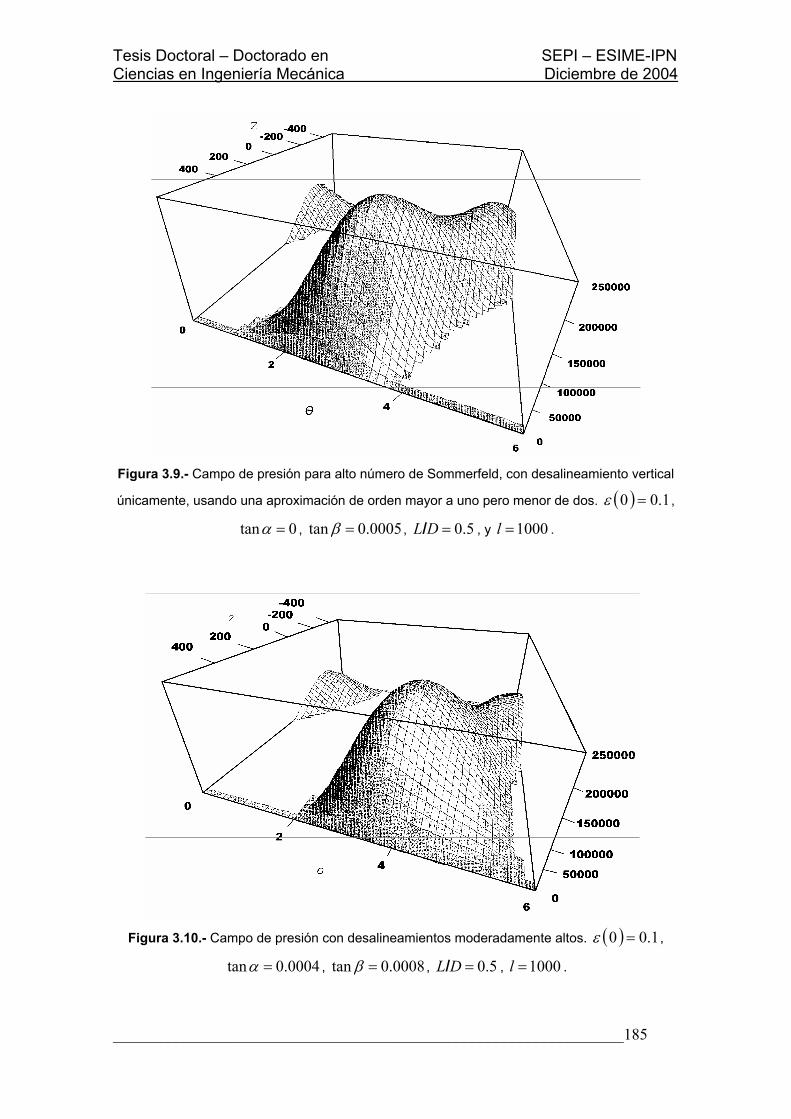
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________185
Figura 3.9.- Campo de presión para alto número de Sommerfeld, con desalineamiento vertical
únicamente, usando una aproximación de orden mayor a uno pero menor de dos. ( ) 1.00 =ε ,
0tan =α , 0005.0tan =β , 5.0=DL/ , y 1000=l .
Figura 3.10.- Campo de presión con desalineamientos moderadamente altos. ( ) 1.00 =ε ,
0004.0tan =α , 0008.0tan =β , 5.0=DL/ , 1000=l .

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________186
3.2.- ANÁLISIS DE UN ÁRBOL, SOBRE CHUMACERAS RÍGIDAS, FRACTURADO Y DESBALANCEADO8.
El sistema a analizar consta de un árbol desbalanceado flexible con un disco y
una fractura transversal al centro, soportado rígidamente en sus extremos.
Para este efecto, se usarán dos sistemas de coordenadas:
1. ( ZYX ,, ) cuyo eje Z es colineal con el eje de las chumaceras.
2. ( Z,,ηξ ) fijo al árbol.
Figura 3.11.- Relación entre los sistemas de coordenadas.
8 Gómez, M. J. C., Jiménez, R. H., Análisis y experimentos de vibración para caracterizar/detectar ejes fracturados, Gran Congreso de Ingeniería Mecánica, Asociación Mexicana de Ingenieros Mecánicos y Electricistas, Sociedad Mexicana de Ingenieros Mecánicos, Academia de Ingeniería, Monterrey Nuevo León, septiembre de 2002, pp.1-10.
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________187
Relacionados (ver Figura 3.11) por las expresiones siguientes:
( )βϕωξξ ++=Φ= tcoscosX (3.44)
( )βϕωηη ++=Φ= tcoscosY (3.45)
donde ω es la velocidad angular del árbol en radianes cada segundo y t es el
tiempo en segundos.
El modelo simplificado [4] para analizar las vibraciones es una masa
concentrada, soportada por un resorte lineal con un grado de libertad. La
primera frecuencia natural sería mkc /=ω donde, si el árbol es relativamente
rígido comparado con las chumaceras, la masa efectiva ( m ) es la masa total
del árbol y del disco, y la rigidez efectiva ( k ) es la rigidez de las chumaceras. Si
el árbol es flexible comparado con las chumaceras, la masa efectiva será,
principalmente, la del disco; y la rigidez efectiva será la del árbol. Este último
sistema se analizará a continuación.
Sea M el centro de masa del disco y J su centro geométrico (Figura 3.11). La
distancia entre J y M es el vector de desbalance U, el cual se normalizará con
respecto al claro radial rC .
rCU
u = (3.46)
Considerando un árbol soportado rígidamente, o con rigideces iguales en
ambos direcciones ortotrópicas; se tendrá el siguiente modelo matemático:

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________188
( )
( )
−−
−+
+
−+
−−
−−
−
−
η
ω
η
ξ
η
ξ
ωλωλ
ωλωλ
λω
ωλRR
R
R
R
R.
.
..
..
22
22
12
21
22
22
qD
Dq
D
D
e
e
=η
ξωUU2 (3.47)
donde
dm
kk
2ηξλ
+=
−
(3.48)
dm
kkq ηξλ
−=
− 2
2 (3.49)
d
ee m
cD =
−
λ2 (3.50)
d
ii m
cD =
−
λ2 (3.51)
ie DDD += (3.52)
R = respuesta del sistema.
q = ortotropía de rigidez del árbol.
eD = relación de amortiguamientos externos.
iD = relación de amortiguamientos internos.
ec = amortiguamientos externos.
ic = amortiguamientos internos.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________189
dm = masa del disco.
−
λ = frecuencia natural, tomando en cuenta q .
ηξ
ηξ
kk
kkq
+
−= (3.53)
El tamaño de la grieta es directamente proporcional a q .
Para analizar la estabilidad del sistema, se usarán las coordenadas ( Z,,ηξ ).
Asúmase como solución a
stAe=ξR (3.54a)
stBe=ηR (3.54b)
El proceso de solución [5] del eigenproblema, conduce a la ecuación
característica
( ) sDDDsDsDs ie
−++
+++
+
−−−−− 222
234
42124 ωω
( ) 0412
222
=−
+
−
+
−−
qDe ωω (3.55)
en la que
λs
s =−
(3.56)
−
−
=λ
ωω (3.57)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________190
Al aplicar el criterio de estabilidad de Routh-Hurwitz, a las raíces de la ecuación
característica, se obtiene
( ) 02
>+
−
−
DDD ie ω (3.58a)
( )[ ] 02
1 222
242
>+
+
−+
−
−−
Dq
DDD
ii ωω (3.58b)
( ) 041 22
2
22
>−
+
−
−−
qDe ωω (3.58c)
Para el criterio de estabilidad dado por (3.58a). Si ei DD < , ω es imaginario y
no hay inestabilidad. Si ei DD = , ω es infinito y no existe inestabilidad. Si
ei DD > , ω es real positivo y existe inestabilidad arriba de ω . Este criterio
puede desecharse ya que (3.58b) y (3.58c) predicen velocidades de
inestabilidad más estrictas y realistas.
De (3.58b), es fácil comprobar que, para un valor constante de iD , la velocidad
arriba de la cual ocurre la inestabilidad es directamente proporcional a eD .
Para un valor de iD constante menor, el comportamiento es cualitativamente
similar, produciendo un umbral de velocidad mayor.
La ecuación (3.58c) predice dos valores de velocidad, es decir, un rango de
velocidad del árbol en el que ocurre la inestabilidad. El comportamiento es
inestable alrededor de la resonancia ( 1=−
ω ).
De la Figura 3.12 se infiere que para valores dados de eD y de q , al aumentar
la velocidad del árbol desde cero hasta la velocidad de operación, se pasa por
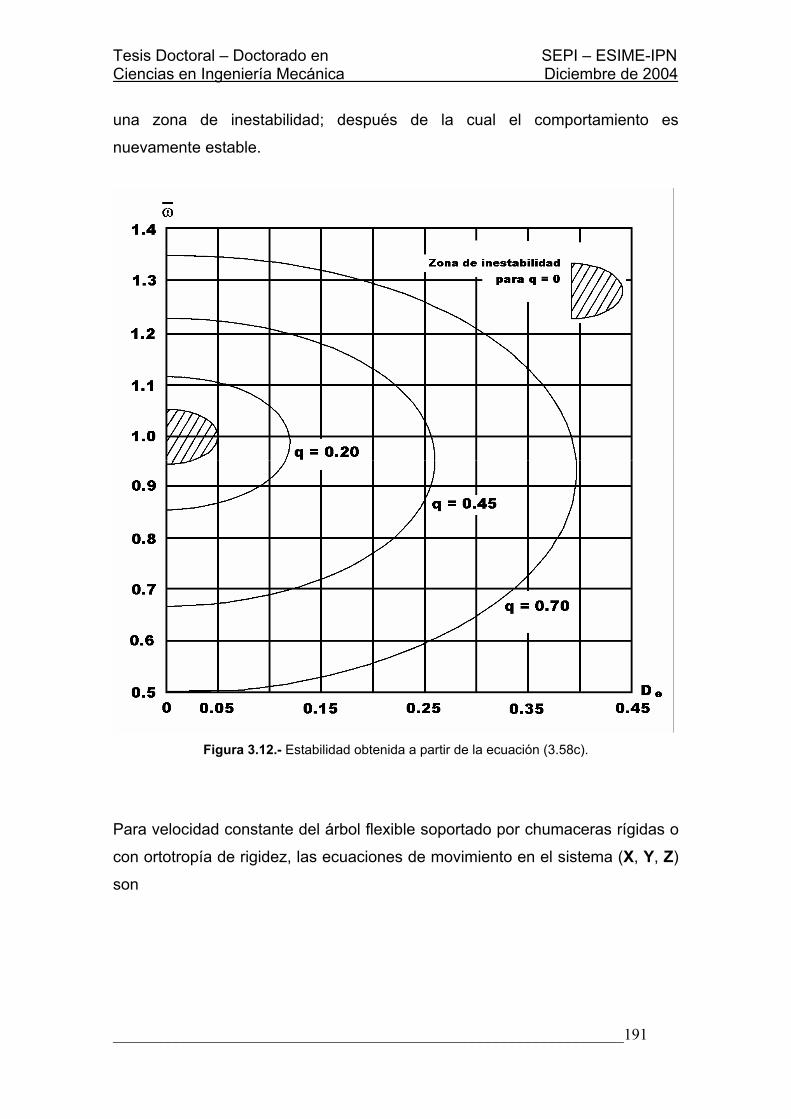
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________191
una zona de inestabilidad; después de la cual el comportamiento es
nuevamente estable.
Figura 3.12.- Estabilidad obtenida a partir de la ecuación (3.58c).
Para velocidad constante del árbol flexible soportado por chumaceras rígidas o
con ortotropía de rigidez, las ecuaciones de movimiento en el sistema (X, Y, Z)
son

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________192
( )
( )
−
+−
++
+
+
−−−
−−−
−
y
x
i
i
y
x
y
x
tqtsenqD
tsenqDtqD R
R
RR
RR
.
.
..
..
ωλωλωλ
ωλωλωλλ
2cos122
222cos12 22
22
=y
x
UU2ω (3.59)
las que al normalizarse se transforman en
−+−
+
+
+
+
−−−
−−
y
x
i
i
y
x
y
x
rr
tqtqsenD
tqsenDtq
rr
Drr
ωωω
ωωω
2cos122
222cos12 /
/
//
//
= −
−−
tsen
t
ω
ωω cos2
(3.60)
La solución [5] transitoria de (3.60) para 01.0== ie DD , 1=−
ω , y 25.0=q se
muestra en las Figuras 3.13 y 3.14. Puede verse el continuo y monotónico
incremento de la respuesta inestable. Asimismo, en las Figuras 3.15 y 3.16 se
observa la respuesta de un sistema estable, debido a que no tiene fractura.
En las Figuras 3.17 y 3.18, aún con fractura en el árbol, el amortiguamiento
externo suficientemente alto estabiliza el sistema.
En las Figuras de la 3.13 a la 3.18; el tiempo está normalizado al multiplicarlo
por la velocidad de operación ω en radianes cada segundo, la respuesta se
normalizó con respecto a la excentricidad.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________193
Figura 3.13.- Respuesta del sistema en condiciones de inestabilidad.
Figura 3.14.- Orbita en condiciones de inestabilidad.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________194
Figura 3.15.- Respuesta del sistema en condiciones de estabilidad (árbol sin fractura).
Figura 3.16.- Orbita del sistema en condiciones de estabilidad (árbol sin fractura).

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________195
Figura 3.17.- Respuesta del sistema, con fractura y desbalance, en condiciones de estabilidad
debido a un alto amortiguamiento externo.
Figura 3.18.- Orbita del sistema, con fractura y desbalance, en condiciones de estabilidad
debido a un alto amortiguamiento externo.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________196
3.3.- SUMARIO DEL CAPÍTULO 3.
El espesor de la capa de lubricante depende de la coordenada axial Z, y del
ángulo θ
( ) ( ) ( ) ( )[ ]0costan,tan,tan,tan, γγθβαβαθ +−+= ZECH r (3.23)
Nikolakopoulos y Papadopoulos [1], usaron para el espesor de la capa de
lubricante la expresión
( ) ( ) ( ) ( )[ ]00coscos01, ϕθψϕθψθεθ +++++= senh xyZZ
La cual es similar a nuestra expresión (3.23). La principal diferencia consiste en
la expresión utilizada para los parámetros de desalineamiento y también en que
nuestra expresión es una función no lineal de Z.
La desigualdad (3.20) debe cumplirse, tanto en condiciones estáticas como en
condiciones dinámicas. Considérese la condición estática de la viga sometida a
una carga concentrada al centro (peso del disco igual a W ) y a una carga
uniformemente distribuida debida al propio peso del árbol ( q ). Por resistencia
de materiales
( ) ( )48
2324 243 xlqlWqxxWqlEIy
+−−+= (3.24)
En la que E es el módulo de elasticidad, I es el momento de inercia de la
sección transversal con respecto a un eje contenido en su plano neutro, l es la
longitud de la viga, y y es su deflexión a una distancia x de su extremo
izquierdo.
Derivando (3.24) con respecto a x :

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________197
( ) ( )48
23812 232 lqlWqxxWqldxdy
EI+−−+
= (3.25)
De las Figuras 3.3, 3.4, 3.5, y 3.6 se puede notar que si ( ) 00 =E , y 0=α ;
( ) βγ =Z ; por lo que, considerando la ecuación (3.20), la ecuación (3.25) se
puede escribir como
( ) ( )01.0arctan
4823812 232
≤+−−+
==EI
lqlWqxxWqldxdy
γ (3.26)
El peso del disco; el material, la sección transversal, y la densidad del árbol;
deberán ser tales que γ cumpla con la ecuación (3.26); teniendo un valor muy
por abajo del arco cuya tangente es 0.01; lo anterior para permitir su
incremento por fuerzas inerciales.
La solución de la ecuación de Reynolds, con desalineamiento angular entre
árbol y chumacera, está dada por
( )
−
=
=
−
22
0 2
tan,tan,,tan,tan,,
lg
pp
-
-
-Z
ZZ θ
µω
βαθβαθ
( ) ( )[ ] ( ) ( )[ ]2222
43 tantan2
tantan2 βαβθαθ ++
−
++ O
lgg
--ZZ (3.40)
en la que
( ) ( )( )[ ]30
cos0106
θε
θεθ
+=
seng (3.41)
( ) ( ) ( ) ( )[ ]( )[ ]
( ) ( )[ ]( )[ ]443
cos01
005
cos01
0cos0cos0
θε
γθθε
θε
γθγεθ
+
−−
+
−+=
senseng (3.42)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________198
( ) ( ) ( ) ( )[ ]( )[ ]
( ) ( )[ ]( )[ ]444
cos01
005
cos01
000
θε
γθθε
θε
γθγεθ
+
−+
+
−−−=
sensensenseng (3.43)
Remarquemos que ambos términos en las series (3.40) satisfacen las
condiciones de frontera (3.31) separadamente, debido a la apropiada elección
de las constantes de integración. En el campo de presiones, con
desalineamiento, expresado por (3.40), el primer término corresponde a la
solución clásica para las chumaceras cortas de Ocvirk. El segundo término en
(3.40), son las correcciones de primer orden ocasionadas por los parámetros
perturbadores αtan , βtan y que sin embargo producen cambios significativos
en la configuración del campo de presión total. La anterior aproximación,
permite una alta precisión tanto en el campo de presión, como en el cálculo de
las fuerzas y momentos resultantes. Es importante observar también que
pequeños ángulos de desalineamiento (que sin embargo son grandes
comparándolos con el pequeño claro) producen alteraciones significativas en el
campo de presión.
Al comparar las Figuras 3.7, 3.8, 3.9, y 3.10; se observa que sin
desalineamiento angular (ver Figura 3.7), la línea en que la presión del
lubricante es igual a cero es paralela al eje Z, para πθ = . Por otro lado, con
desalineamiento angular (ver Figura 3.8, 3.9, y 3.10), en la Figura 3.8 la línea
deja de ser paralela al eje Z, y ahora pasa aproximadamente por 5.2=θ (en Z
= l5.0 ), y por 5.3=θ (en Z = l5.0− ). Esta misma observación se acentúa aún
más en los casos de las Figura 3.9 y 3.10 en donde la excentricidad producida
por un alto número de Sommerfeld es menor en magnitud.
Como se puede anticipar, el campo de presión del lubricante generará fuerzas
y momentos, que a su vez influirán sobre el equilibrio del sistema, provocando
nuevos valores de la estabilidad dinámica.
De la Figura 3.12 se infiere que para valores dados de eD y de q , al aumentar
la velocidad del árbol desde cero hasta la velocidad de operación, se pasa por

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________199
una zona de inestabilidad; después de la cual el comportamiento es
nuevamente estable.
Para velocidad constante del árbol flexible soportado por chumaceras rígidas o
con ortotropía de rigidez, las ecuaciones de movimiento en el sistema (X, Y, Z)
son
( )
( )
−
+−
++
+
+
−−−
−−−
−
y
x
i
i
y
x
y
x
tqtsenqD
tsenqDtqD R
R
RR
RR
.
.
..
..
ωλωλωλ
ωλωλωλλ
2cos122
222cos12 22
22
=y
x
UU2ω (3.59)
las que al normalizarse se transforman en
−+−
+
+
+
+
−−−
−−
y
x
i
i
y
x
y
x
rr
tqtqsenD
tqsenDtq
rr
Drr
ωωω
ωωω
2cos122
222cos12 /
/
//
//
= −
−−
tsen
t
ω
ωω cos2
(3.60)
La solución transitoria de (3.60) para 01.0== ie DD , 1=−
ω , y 25.0=q se
muestra en las Figuras 3.13 y 3.14. Puede verse el continuo y monotónico
incremento de la respuesta inestable. Asimismo, en las Figuras 3.15 y 3.16 se
observa la respuesta de un sistema estable, debido a que no tiene fractura.
En las Figuras 3.17 y 3.18, aún con fractura en el árbol, el amortiguamiento
externo suficientemente alto estabiliza el sistema.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________200
Referencias del capítulo 3.
[1] Nikolakopoulos, P. G., Papadopoulos, C. A., Controllable Misaligned Journal
Bearing, Lubricated with Smart Fluids, J. Intelligent Materials, Systems and
Structures. Vol. 8, 1997, pp.125-137.
[2] Nossov, V. R., Gómez, M. J. C., Jiménez, R. H., Campo de Presión del
Lubricante en Chumaceras Desalineadas de Máquinas Rotatorias, Sexto
Congreso Nacional de Ingeniería Electromecánica y de Sistemas, Vol. 1, No.
1, 2001, pp.273-280.
[3] Ocvirk, F., Short Bearing Approximation for Full Journal Bearings, NACA TN
20808, 1952.
[4] Tesis Magistral de Rafael García Illescas dirigida por el Dr. Julio César
Gómez Mancilla. Análisis de Vibración para Caracterizar el Comportamiento de
Rotores Fracturados Operando en Línea. 2001.
[5] García, I. R., Gómez, M. J. C., Estabilidad Lineal y Respuesta Transitoria de
Ejes Rotatorios Fisurados, Quinto Congreso Nacional de Ingeniería
Electromecánica y de Sistemas, 2000.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________201
4.- INVESTIGACIÓN DOCUMENTAL.
El objetivo es desarrollar una técnica de cálculo, capaz de predecir con
seguridad la respuesta vibratoria de un sistema, para hacer posible que las
fracturas puedan ser detectadas monitoreando la vibración, antes de que
ocurran fallas catastróficas.
4.1.- FUNDAMENTOS TEÓRICOS6.
Para esta sección [6] usaremos la nomenclatura siguiente:
=ija coeficientes de rigidez del soporte.
=ijb coeficientes de amortiguamiento del soporte.
=E Módulo de Young.
( ) =/, ssG Función de Green.
=I Momento de inercia de la sección transversal.
12 −=i .
=K Rigidez del árbol.
=cK Factor de concentración de esfuerzos.
2ηξ KK
K m
+= .
2ηξ KK
K−
=∆ .
=M Masa del árbol.
=fM Momento flexionante.
=m Masa por unidad de longitud.
=xp Componente en x , del vector fuerza externa.
=yp Componente en y , del vector fuerza externa.
=r Radio del árbol.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________202
=s Posición axial.
=t Tiempo.
( ) =su n Enésima eigenfunción.
=
yx
Sistema de coordenadas estacionario.
( ) =sy Desplazamiento del árbol.
=
ηξ
Sistema de coordenadas rotando.
=∆ Pequeño cambio en el parámetro que precede.
=ν Relación de Poisson.
=λ Flexibilidad del árbol.
=ω Frecuencia angular.
=ϕ Ángulo del eje normal a la fractura con respecto a la
horizontal positiva.
=µ Profundidad adimensional, igual a la profundidad de la fractura
entre el radio del árbol.
=.
Derivada con respecto al tiempo.
=/ Derivada con respecto a la posición.
=m Medio.
=ξ En dirección del eje ξ .
=η En dirección del eje η .
=x En dirección del eje x .
=y En dirección del eje y .
La apertura y cierre de la fractura es una función del momento flexionante, de
la ubicación de la fractura, y de la posición de los ejes principales. Los cambios
de rigidez son función de la apertura y cierre de la fractura. Lo anterior se
ilustra en la Figura 4.1.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________203
fracturadano
área
abiertascon carasfractura
cerradascon carasfracturaη
ϕ = 35o
ϕ = -35o
ϕ 75 o
ϕ = 0o
ξ
ξ
η
ϕ = 90o
ϕ = 30o
Figura 4.1.- Modelo de sección transversal fracturada, en diferentes posiciones angulares.
Cuando la fractura crece, las vibraciones del árbol pueden incrementarse a tal
nivel, que el momento flexionante adicional en la posición de la fractura,
interactuando con el momento flexionante debido al propio peso del árbol,
deberá ser tomado en cuenta. En este estado las fuerzas dinámicas trasmitidas
a las chumaceras serán del orden del peso del árbol, y no habrá duda de que la
máquina tiene un serio problema. Para determinar la profundidad de fractura
mínima que será detectable por monitoreo de la onda mecánica, se asume que
la apertura y cierre de la fractura, es dominada por la carga debida al propio
peso, y es por lo tanto una función periódica.
Asumiendo que para πϕ ≤≤0 , la parte de la fractura por arriba del diámetro
horizontal está cerrada, mientras que toda la fractura está totalmente abierta

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________204
para πϕ −≤≤0 . Este modelo implica que la dirección de los ejes principales
para πϕ ≤≤0 es una función de ϕ . Sin embargo, se percibe que este modelo
es un poco irreal debido a que las superficies de la fractura no cerrarán
abruptamente en el diámetro horizontal y que cerrará como se muestra en la
Figura 4.1. Para simplificar considérense los ejes principales fijos al árbol y en
las direcciones ( ηξ , ).
Las ecuaciones de movimiento de tal sistema fracturado son:
=
+
++
+
yx
aKaaaK
y
xbbbb
y
xM
M
m
m
2221
1211
2221
1211
00
.
.
..
..
+
∆−∆
∆∆−
y
x
pp
yx
tKtKsentKsentKωω
ωω2cos2
22cos (4.1)
obtenidas, transformando las coordenadas rotando ( ηξ , ) a coordenadas
estacionarias ( yx , ). El amortiguamiento externo se ha ignorado. xp , yp son
fuerzas aplicadas externamente como las debidas a la gravedad y a la capa de
lubricante.
La ecuación (4.1) es lineal con coeficientes periódicos y no es factible una
solución exacta. Es posible, sin embargo, obtener soluciones aproximadas si se
nota que el cambio fraccional en la rigidez ( K ) del árbol es siempre pequeño
(10 a 15 por ciento) para fracturas grandes. Términos de la forma ( )xtK∆
pueden ser removidos para la solución no homogénea de la ecuación (4.1) y
tratarlos como términos de fuerza adicional resolviendo la ecuación por
aproximaciones sucesivas.
Para lograrlo debe obtenerse una expresión analítica para la función ( )tK∆ , y
considerar la apertura y cierre de la fractura. Dada la periodicidad de la función
es claramente sensato expandirla como una serie de Fourier, el problema es la

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________205
elección de los coeficientes. Los resultados experimentales han indicado que
una función de la forma
( )21max ϕsenK −∆
(4.2)
es apropiada. Es cierto, sin embargo, que la apertura y cierre de la fractura
será una función de su profundidad, aún cuando el comportamiento dominante
será un efecto recíproco. La fractura causa cambios en la rigidez del árbol en
ambas direcciones ξ , y η , sin embargo el cambio en la dirección ξ es mayor.
No obstante, la variación en la dirección η no puede ser ignorada,
especialmente para fracturas grandes. Claramente el efecto de apertura y
cierre es en ambas direcciones y la misma función es usada, con diferente
maxK∆ .
La fractura es simulada por un cambio localizado en la geometría del árbol. Hay
dos variables asociadas con tal variación, la reducción de diámetro y de
sección transversal. Para relacionar las dos variables al tamaño de la fractura,
se debe determinar el efecto de dicha fractura sobre la rigidez del árbol. Esto
se ha discutido en la literatura (ver referencias al final del capítulo) y se
demostró cómo el cambio de rigidez de un cuerpo elástico está relacionado al
factor de concentración de esfuerzos en la fractura. Se ha considerado
fracturas circunferenciales, aquí se considera fractura cordal, ya que es más
realista.
Asumiendo que el factor de concentración de esfuerzos ( cK ), para una fractura
cordal en un árbol de sección transversal circular en flexión, es una función
sólo del momento flexionante en la fractura, por análisis dimensional este factor
puede escribirse como

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________206
( )µπ
µ fr
rMK c
3= (4.3)
donde ( )µf es una función adimensional a determinar; µ es la profundidad
normalizada, con respecto al radio ( r ) del árbol, de la fractura.
La deflexión y , en un punto s debido a la carga ( )/sP puede ser relacionada
por medio de la función de Green ( )/0 .ssG del sistema.
( ) ( ) ( ) ///
00 , dssPssGsy
L
∫= (4.4)
Puede demostrarse que la función de Green para el árbol fisurado es
( ) ( ) ( ) ( ) ( ) ( )µπ
ν fssGssGrEI
ssGssG cc ,,4
1,, /0
3
22/
0/
....
−+= (4.5)
en la que ν es la relación de Poisson, E es el módulo de elasticidad, e I es el
momento de inercia del área, y donde
( ) ( ) ( ) //22//
0
2 µµµµµµµ
ν dfF −= ∫ (4.6)
En la ecuación (4.5), todas las propiedades del árbol están contenidas en la
expresión, multiplicando la función ( )µf , la cual es por lo tanto, para una
forma de fractura dada, una función universal de su profundidad adimensional.
La relación entre la expresión analítica (4.5) para la función flexibilidad, en un
sistema con fractura y en un sistema con reducción de rigidez localizada, se
encontrará igualando los cambios en la frecuencia natural del enésimo modo
de los dos sistemas.
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________207
El cambio en la frecuencia de un sistema conteniendo una fractura, como el
descrito por (4.5) es
( ) ( ) ( ) ( )cnn sufrEI 2
23
22 14
−
−=∆
..µν
πω (4.7)
Cuando se considera perturbación al sistema, es usual asumir que la elástica
es la misma que la del sistema sin perturbar. Esto es permisible para pequeñas
perturbaciones, puesto que puede demostrarse que la contribución debida al
cambio en la elástica es de segundo orden respecto a la debida a la
perturbación. Una modificación al método de Rayleigh se usará asumiendo que
la segunda derivada de las elásticas están definidas por
..yEIM f = (4.8)
Aún cuando las elásticas para los dos casos son asumidas idénticas, el
momento flexionante resultante desde las fuerzas inerciales cambiará, porque
la frecuencia angular (ω ) natural de vibración varía. Luego para el sistema
original tenemos
( )( )
( )sI
sMsyE f
0
00 =
.. (4.9)
y para el sistema perturbado
( )( ) ( )( ) ( )sIsI
sMsMsyE ff
∆−
∆−=
0
0.. (4.10)
Tenemos también

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________208
( ) ( ) ( ) ( ) ( ) ///
0
/200 dssysmsssM
s
f ∫ −= ω (4.11)
( ) ( ) ( ) ( ) //
0
//2 dssysmsssMs
f ∫ −∆=∆ ω (4.12)
donde la suposición de elástica invariante se ha hecho en la ecuación (4.12).
Usando las ecuaciones (4.9) a (4.12) en el método de Rayleigh, considerando
el cambio en I∆ , y asumiendo constante la segunda derivada de la forma
modal, sobre esta longitud, obtenemos:
( )
∆−−
∆−
∆
=∆
20
2
0
2
02 1
1 ω
ωω
II
IyE..
(4.13)
donde ( )sy 0
.. e ( )sI 0 se evalúan en la posición de la sección reducida. Si
consideramos sólo cambios de primer orden en 2ω∆ , para lo cual es válida la
ecuación (4.7), tenemos desde las ecuaciones (4.7) y (4.13)
( ) ( )µπ
νfI
LrIII
03
2
0
14
−=
∆−∆
(4.14)
la cual, para un árbol circular, cambia a
( ) ( )µν
fL
rII
I 2
0
1−=
∆−∆
(4.15)
Que es la relación deseada.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________209
Debido a la falta de expresiones analíticas para el factor de concentración de
esfuerzos de una fractura cordal, y al rango limitado de valores calculados
usando análisis de esfuerzo por elemento finito, se decidió medir la función
( )µf experimentalmente. Para este propósito se usaron barras de acero de
magnitudes conocidas, simplemente apoyadas, con una fractura a la mitad del
claro. La carga fue aplicada en la zona adyacente a la fracturada y la deflexión
fue medida en esta posición. Si ( )/, ssG es evaluada, en el punto 2/ /Lss == ,
para un árbol simplemente apoyado; obtenemos
( ) ( )µπ
νλλ fErL
3
22
04
1−+= (4.16)
en donde λ (flexibilidad) es la inversa de la rigidez.
La cual puede ser usada para calcular ( )µf desde los datos experimentales.
4.2.- RESULTADOS.
Usando la ecuación (4.16) y después de medir experimentalmente la
flexibilidad del rotor sin y con fractura, variando la profundidad de la fractura,
Mayes graficó los resultados de la Figura 4.2. Para un valor de la profundidad
adimensional de la fractura 5.0=µ , la función adimensional, aproximada, de la
profundidad de la fractura es 0.89, obtenida experimentalmente.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________210
Figura 4.2.- Función adimensional de la profundidad de la fractura ( )µf contra la profundidad
adimensional de la fractura µ .
4.3.- SUMARIO DEL CAPÍTULO 4.
Debido a la falta de expresiones analíticas para el factor de concentración de
esfuerzos de una fractura cordal, y al rango limitado de valores calculados
usando análisis de esfuerzo por elemento finito, se decidió medir la función

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________211
( )µf experimentalmente. Para este propósito se usaron barras de acero de 10
milímetros de diámetro, 405 milímetros de longitud, simplemente apoyadas,
con una fractura a la mitad del claro. La carga fue aplicada en la zona
adyacente a la fracturada y la deflexión fue medida en esta posición. Si
( )/, ssG es evaluada, en el punto 2/ /Lss == , para un árbol simplemente
apoyado; obtenemos
( ) ( )µπ
νλλ fErL
3
22
04
1−+= (4.16)
en donde λ (flexibilidad) es la inversa de la rigidez.
La cual puede ser usada para calcular ( )µf desde los datos experimentales.
Referencias del capítulo 4.
[1] Paris, P. C., y Sih, G. C., Stress Analysis of Crack, ASTM, STP No. 381,
1965.
[2] Mayes, I. W., y Davies, W. G. R., The Vibrational Behaviour of a Rotating
Shaft System Containing a Traverse Crack, Paper C168/76, I. Mech. E.
Conference, Vibrations in Rotating Machinery, 1976.
[3] Gasch, R., Dynamic Behaviour of a Simple Rotor With a Cross-Sectional
Crack, Paper C178/76, I. Mech. E. Conference, Vibrations in Rotating
Machinery, 1976.
[4] Mayes, I. W., Crack Propagation in Rotating Shafts, paper 77-DET-164,
ASME Conference on Mechanical Vibrations, Chicago, 1977.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________212
[5] Grabowski, B., The Vibrational Behaviour of a Turbine Rotor Containing a
Transverse Crack, ASME Design Engineering Technical Conference, Paper No.
79-DET-67, St. Louis, 1979.
[6] Mayes, I. W., y Davies, W. G. R., Analysis of the Response of a Multi-Rotor-
Bearing System Containing a Transverse Crack a Rotor, J. of Vib., Acoustics,
and Reliability in Design, Vol. 106/143, 1984.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________213
5.- TRABAJO EXPERIMENTAL.
5.1.- METODOLOGÍA.
Del árbol apoyado simplemente sobre las chumaceras, como se ve en la Figura
5.1, se suspendieron sucesivamente discos usando un alambre. El peso de los
discos y del alambre fue medido. Para asegurar la perpendicularidad del eje del
árbol con respecto a la línea geodésica; se emplearon dos marmoles (patrones
de planicidad) para apoyar cada una de las chumaceras, la horizontalidad de
las superficies de apoyo de los marmoles y su pertenencia a un mismo plano,
se logró usando un nivel de burbuja. El árbol se colocó con la fractura hacia
arriba, horizontal, y hacia abajo, midiendose en cada caso la flexibilidad. Todas
las mediciones se efectuaron a temperatura constante y con instrumentos
previamente calibrados.
5.2.- DESARROLLO.
A árboles de acero de 10 milímetros de diámetro, 350.6 milímetros de longitud,
con una fractura controlada a la mitad del claro; se les midió la flexibilidad para
diferentes posiciones angulares de la fractura. Posteriormente, usando la
ecuación (4.16), se calculó ( )µf . La carga fue aplicada en la zona adyacente a
la fracturada y la deflexión fue medida en esta posición. Aquí se reportan los
resultados obtenidos para el árbol al que se le efectuó una fractura de 2.5
milímetros de profundidad, es decir 5.0=µ .
El diagrama físico, sin incluir al disco, se muestra en las Figuras 5.1.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________214
Figura 5.1a.- Diagrama físico del árbol fracturado, simplemente apoyado.
350.6
7.312.7
Figura 5.1b.- Diagrama físico del árbol fracturado, simplemente apoyado-vista frontal.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________215
2.5
0.06858
Figura 5.1c.- Detalle del árbol fracturado-vista frontal.
Para aplicar la carga se usó un disco y un alambre. Se pesaron con la balanza
TRIPLE BEAM marca OHAUS. Los pesos en gramos (Tabla 5.1) fueron:
Tabla 5.1.- Pesos medidos.
PIEZA ALAMBRE DISCO
PESO UNITARIO 1.3 806
Para medir la deflexión se usó un indicador de carátula (2937F-10) cuya
discriminación es de 0.0001 pulgadas. Las deflexiones, en diezmilésimas de
pulgada, correspondientes al peso acumulado en Kilogramos (Tabla 5.2)
fueron:

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________216
Tabla 5.2.- Deflexiones correspondientes al peso acumulado.
Peso acumulado Deflexión
0.8073 32.5 33 33.5
Fractura
Arriba
Fractura
horizontal
Fractura
abajo
En la Tabla 5.3 se indican las deflexiones en milímetros y los pesos en
Kilogramos.
Tabla 5.3.- Deflexiones (mm.) correspondientes al peso (Kg.) acumulado.
Peso acumulado Deflexión
0.8073 0.08255 0.08382 0.08509
Fractura
Arriba
Fractura
horizontal
Fractura
abajo
La flexibilidad, deflexión entre carga, se muestra en la Tabla 5.4.
Tabla 5.4.- Flexibilidad en milímetros sobre Kilogramo.
Peso acumulado Flexibilidad
0.8073 0.102254428 0.103827573 0.105400718
Fractura
arriba
Fractura
horizontal
Fractura
abajo
Considerando la flexibilidad original ( 0λ ) como aquella correspondiente a la
fractura arriba, y la flexibilidad ( λ ) como la correspondiente a la fractura abajo.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________217
La variación de flexibilidad ( 0λλ − ) se puede calcular. La Tabla 5.5 indica esta
variación de flexibilidad.
Tabla 5.5.- Variación de flexibilidad en milímetros sobre Kilogramo.
Peso acumulado Variación de flexibilidad
0.8073 0.00314629
Conocida la variación de flexibilidad ( 0λλ − ), con L = 350.6 milímetros (ver
Figuras 4.2), =r 5 milímetros. Obteniendo ν = 0.303 y E = 2.1 x 106 Kg./cm2 =
2.1 x 104 Kg./mm2 del Manual del Ingeniero Mecánico de Marks. Con la
ecuación (4.16) se puede calcular ( )µf , ver Tabla 5.6.
Tabla 5.6.- Función adimensional de la profundidad de la fractura.
Peso acumulado ( )µf
0.8073 0.929687341
Todas las mediciones se efectuaron a una temperatura de 250 C.
5.3.- SUMARIO DEL CAPÍTULO 5.
Fueron fracturados árboles de manera controlada usando el proceso de electro
erosión. La fractura cordal (con profundidades de 5, 2.5, y 1.25 milímetros)
hecha en cada uno de tres árboles, se efectúo con una placa de cobre
(electrodo) de 0.0027 pulgadas. La flexibilidad ( λ ) del árbol fue calculada para
diferentes posiciones angulares de la fractura.
La Tabla 5.6 indica el valor de la función para 5.0=µ .

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________218
Tabla 5.6.- Función adimensional de la profundidad de la fractura.
Peso acumulado ( )µf
0.8073 0.929687341
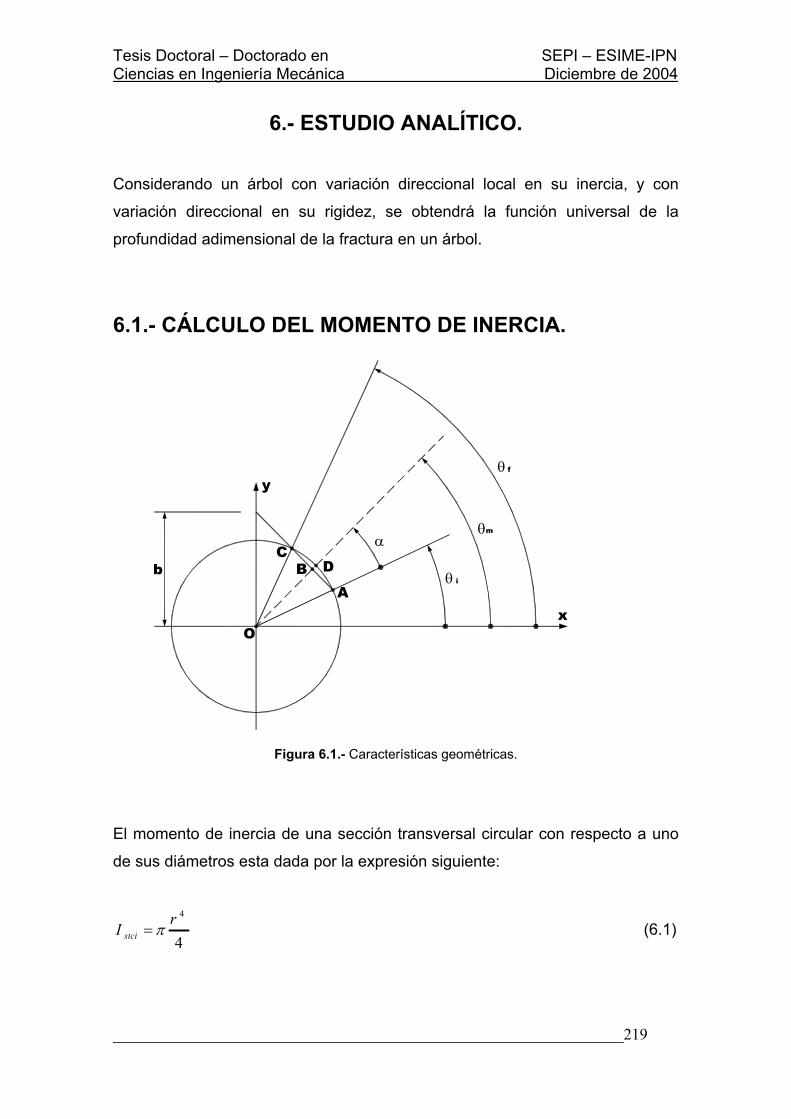
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________219
6.- ESTUDIO ANALÍTICO.
Considerando un árbol con variación direccional local en su inercia, y con
variación direccional en su rigidez, se obtendrá la función universal de la
profundidad adimensional de la fractura en un árbol.
6.1.- CÁLCULO DEL MOMENTO DE INERCIA.
b
θ f
θm
iθ
α
DC
BA
O
y
x
Figura 6.1.- Características geométricas.
El momento de inercia de una sección transversal circular con respecto a uno
de sus diámetros esta dada por la expresión siguiente:
4
4rI stci π= (6.1)
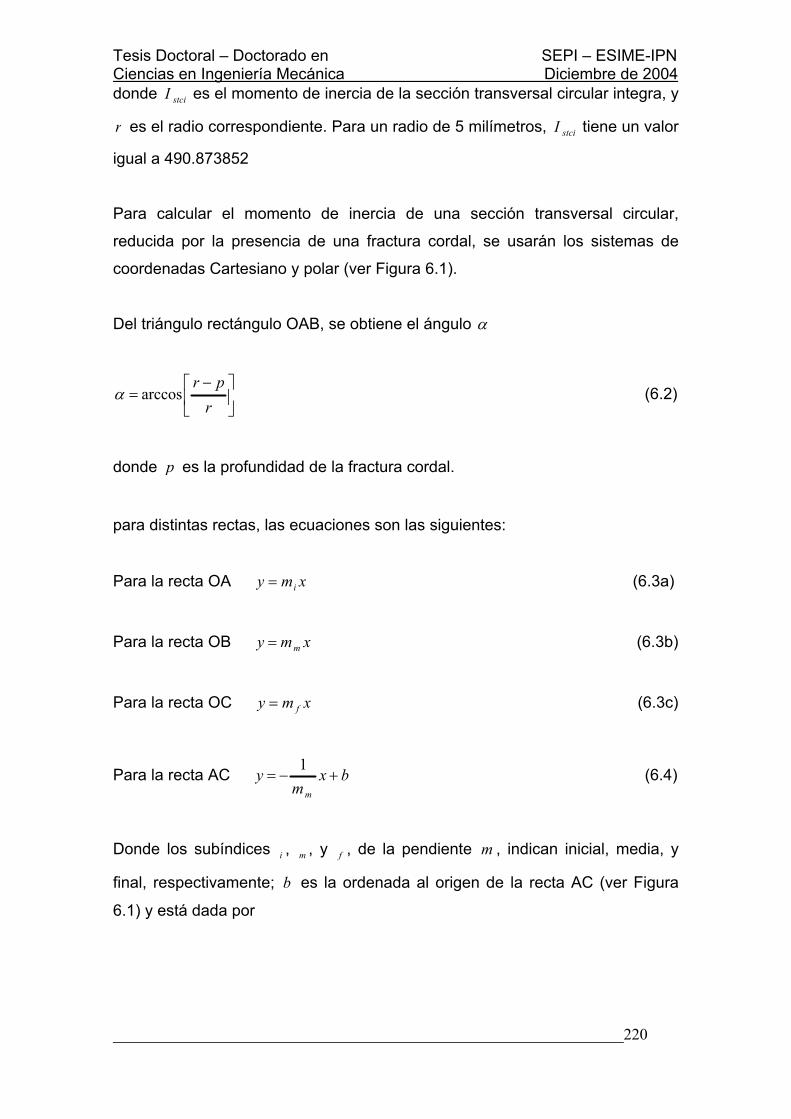
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________220
donde stciI es el momento de inercia de la sección transversal circular integra, y
r es el radio correspondiente. Para un radio de 5 milímetros, stciI tiene un valor
igual a 490.873852
Para calcular el momento de inercia de una sección transversal circular,
reducida por la presencia de una fractura cordal, se usarán los sistemas de
coordenadas Cartesiano y polar (ver Figura 6.1).
Del triángulo rectángulo OAB, se obtiene el ángulo α
−=
rpr
arccosα (6.2)
donde p es la profundidad de la fractura cordal.
para distintas rectas, las ecuaciones son las siguientes:
Para la recta OA xmy i= (6.3a)
Para la recta OB xmy m= (6.3b)
Para la recta OC xmy f= (6.3c)
Para la recta AC bxm
ym
+−=1
(6.4)
Donde los subíndices i , m , y f , de la pendiente m , indican inicial, media, y
final, respectivamente; b es la ordenada al origen de la recta AC (ver Figura
6.1) y está dada por

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________221
( )msenpr
bθ
−= (6.5)
La ecuación de la circunferencia es 222 ryx =+ (6.6)
La sección transversal (asurada) generada por la fractura cordal se muestra en
la Figura 6.2, y es igual al área de la Figura 6.3a menos el área de la Figura
6.3b.
El área del sector angular OADC menos el área del sector triangular OABC es
igual al área de la Figura 6.3b.
La variación direccional local en la inercia de la sección transversal generada
por la fractura cordal ( stgfcI ), se puede obtener en función de los momentos de
inercia de la sección transversal circular integra, del sector angular, y del sector
triangular, con la expresión siguiente:
stsastcistgfc IIII +−= (6.7)
x
CB
A
y
Figura 6.2.- Sección transversal generada por la fractura cordal.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________222
D
C
A
y y
O
AB
CD
x x
(a).- Sección transversal integra. (b) Sección transversal fracturada.
Figura 6.3.- Secciones transversales componentes.
En la ecuación (6.7) stciI es constante y está dado por la ecuación (6.1). El
segundo termino del segundo miembro de esta ecuación es el momento de
inercia del sector angular ( saI ), dependen del valor de mθ y está dado por
( )
−−
−=
−== ∫ 4
22
2442
244
442
4ifif
sa
sensenrsenrdsen
rI
f
i
f
i
θθθθθθθθ
θ
θ
θ
θ
−−
−=
4
22
24
4ifif
sa
sensenrI
θθθθ (6.8)
El tercer término del segundo miembro de la ecuación ( stI ) es el momento de
inercia del sector triangular. Se obtendrá en función de las áreas OEC y OEA
(ver Figura 6.4).

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________223
(b)(a)
A
O
y
xEE x
y
O
C
Figura 6.4.- Áreas componentes del sector triangular.
De las Figuras 6.4a y 6.4b, y por resistencia de materiales, stI es igual a
( ) ( ) ( ) ( ) ( )[ ]33333
cos1212cos12cos ifm
i
m
f
mst sensen
rprrsenprrsenprI θθ
θθ
θ
θ
θ−
−=
−−
−=
( ) ( ) ( )[ ]333
cos12 ifm
st sensenrpr
I θθθ
−−
= (6.9)
para todo ( ) 2/πθ n≠ con ,......7,5,3,1=n
Si ( ) 2/πθ n= con ,......7,5,3,1=n , las dos áreas serían infinitas y su diferencia
nula.
Para tal condición el momento de inercia del sector triangular (ver Figuras 6.5a
y 6.5b) sería
( ) ( ) ( )iiist
prrprr
prrI θθθ cos
212cos2
3cos2
333 −=
−−
−= (6.10)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________224
(b)(a)x
yC AAC
y
x(a)
Figura 6.5.- Áreas componentes del sector triangular para ( ) 2/πθ n= con ,......7,5,3,1=n
Tabla 6.1.- Variación direccional local del momento de inercia.
θm en
grados Istgfc
p=0.5
Istgfc
p=1.0
Istgfc
p=1.5
Istgfc
p=2.0
Istgfc
p=2.5
Istgfc
p=3.0
0 489.46 483.33 471.26 452.98 428.74 399.10
30 481.70 465.33 444.70 420.98 394.91 367.02
60 466.17 429.33 391.59 356.98 327.25 302.86
90 458.41 411.33 365.03 324.98 293.42 270.78
120 466.17 429.33 391.59 356.98 327.25 302.86
150 481.70 465.33 444.70 420.98 394.91 367.02
180 489.46 483.33 471.26 452.98 428.74 399.10
210 481.70 465.33 444.70 420.98 394.91 367.02
240 466.17 429.33 391.59 356.98 327.25 302.86
270 458.41 411.33 365.03 324.98 293.42 270.78
300 466.17 429.33 391.59 356.98 327.25 302.86
330 481.70 465.33 444.70 420.98 394.91 367.02
360 489.46 483.33 471.26 452.98 428.74 399.10
Si en la ecuación (6.7) sustituimos las ecuaciones (6.1) para stciI , (6.8) para
saI , y (6.9) o (6.10) para stI ; obtenemos la variación direccional local en el

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________225
momento de inercia de cualquier sección transversal localizada al centro del
árbol o a una distancia menor o igual a 2/A de dicho centro, siendo A el ancho
de la fractura. Dicha variación se muestra en la Tabla 6.1 y en la Figura 6.6;
para evitar una dimensión vertical excesiva de la tabla, se indican valores del
momento de inercia a cada 30 grados, la figura se hizo con variación unitaria
del ángulo mθ .
Los momentos de inercia en la tabla están dados en mm4, y se calcularon para
un radio del árbol igual a 5 mm, y una profundidad de fractura variable desde
0.5 mm hasta 3 mm de medio en medio milímetro.
Como se esperaba, al aumentar la profundidad de la fractura se disminuye el
momento de inercia; comparativamente se aumenta el rango de variación de
los momentos de inercia cuando ( ) 2/πθ nm = con n = 0, 2, 4, … y cuando
( ) 2/πθ nm = con n = 1, 3, 5, …
En la Figura 6.6 las series 1, 2, 3, 4, 5, y 6 corresponden a una profundidad de
fractura igual a 0.5, 1.0, 1.5, 2.0, 2.5, y 3.0 mm., respectivamente; se puede
notar que al variar la profundidad de la fractura, la variación del momento de
inercia es mayor cuando ( ) 2/πθ nm = con n = 1, 3, 5, …
MOMENTOS DE INERCIA
0
100
200
300
400
500
600
0 45 90 135 180 225 270 315 360
θm en grados
MIL
ÍMET
RO
S A
LA
CU
AR
TA P
OTE
NC
IA
Serie1Serie2Serie3Serie4Serie5Serie6
Figura 6.6.- Variación direccional local del momento de inercia.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________226
6.2.- CÁLCULO DE LA FLEXIBILIDAD.
Para analizar la flexibilidad considérese la Figura 6.7, en la que se muestra un
diagrama unifilar del árbol fracturado simplemente apoyado. La distancia A
representa el ancho de la ranura, el cual está amplificado para mayor claridad.
L 1 A
L
Figura 6.7.- Diagrama unifilar del árbol fracturado simplemente apoyado.
Por resistencia de materiales se plantean las ecuaciones siguientes:
para 10 Lx ≤≤
xP
dxyd
EI stci 22
2
= (6.11)
12
4Cx
Pdxdy
EI stci += (6.12)
213
12CxCx
PyEI stci ++= (6.13)
para
+≤≤
211A
LxL

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________227
xP
dxyd
EI stgfc 22
2
= (6.14)
32
4Cx
Pdxdy
EI stgfc += (6.15)
433
12CxCx
PyEI stgfc ++= (6.16)
En el tramo 10 Lx ≤≤ , si 0=x luego 0=y , de donde
02 =C (6.17)
En el tramo
+≤≤
211A
LxL , si
+=21A
Lx luego 0=dxdy
, de donde
2
13 24
+−=A
LP
C (6.18)
Si 1Lx = , la derivada de y con respecto a x , así como y misma deben tener
el mismo valor sin importar el tramo al que pertenezcan, de donde
( ) ( )213
211 44
LP
II
CLP
Cstgfc
stci −
+= (6.19)
( ) ( ) 133
12113
14 1212LCL
PI
ICLCL
PC
stci
stgfc−−
++= (6.20)

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________228
Tabla 6.2.- Variación direccional de la flexibilidad.
θm en
grados (y/P)
p=0.5
(y/P)
p=1.0
(y/P)
p=1.5
(y/P)
p=2.0
(y/P)
p=2.5
(y/P)
p=3.0
0 0.087098 0.087098 0.087100 0.087102 0.087105 0.087109
30 0.087098 0.087100 0.087103 0.087106 0.087110 0.087115
60 0.087100 0.087105 0.087110 0.087117 0.087123 0.087129
90 0.087101 0.087107 0.087115 0.087124 0.087132 0.087139
120 0.087100 0.087105 0.087110 0.087117 0.087123 0.087129
150 0.087101 0.087106 0.087113 0.087120 0.087127 0.087134
180 0.087098 0.087098 0.087100 0.087102 0.087105 0.087109
210 0.087098 0.087100 0.087103 0.087106 0.087110 0.087115
240 0.087100 0.087105 0.087110 0.087117 0.087123 0.087129
270 0.087101 0.087107 0.087115 0.087124 0.087132 0.087139
300 0.087100 0.087105 0.087110 0.087117 0.087123 0.087129
330 0.087098 0.087100 0.087103 0.087106 0.087110 0.087115
360 0.087098 0.087098 0.087100 0.087102 0.087105 0.087109
FLEXIBILIDAD
0.087070
0.087080
0.087090
0.087100
0.087110
0.087120
0.087130
0.087140
0.087150
0 45 90 135 180 225 270 315 360
θm en grados
MIL
ÍMET
RO
S/K
g
Serie1Serie2Serie3Serie4Serie5Serie6
Figura 6.8.- Variación direccional de la flexibilidad.
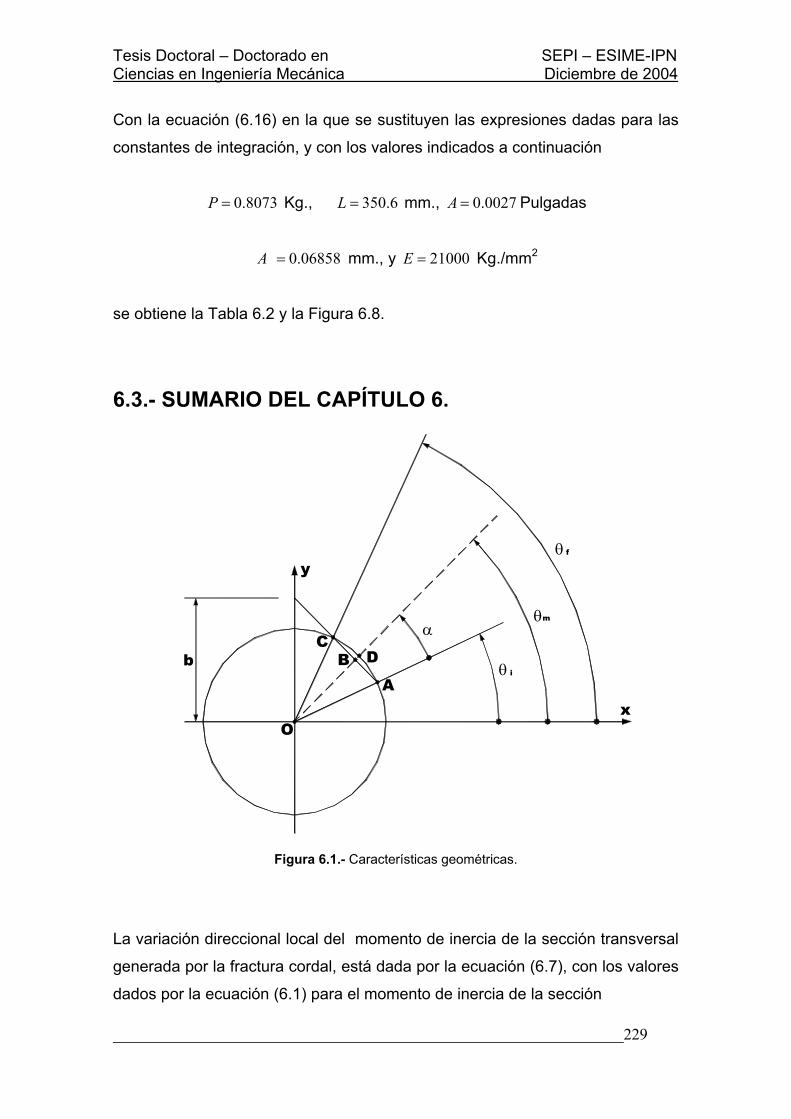
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________229
Con la ecuación (6.16) en la que se sustituyen las expresiones dadas para las
constantes de integración, y con los valores indicados a continuación
8073.0=P Kg., 6.350=L mm., 0027.0=A Pulgadas
A 06858.0= mm., y 21000=E Kg./mm2
se obtiene la Tabla 6.2 y la Figura 6.8.
6.3.- SUMARIO DEL CAPÍTULO 6.
b
θ f
θm
iθ
α
DC
BA
O
y
x
Figura 6.1.- Características geométricas.
La variación direccional local del momento de inercia de la sección transversal
generada por la fractura cordal, está dada por la ecuación (6.7), con los valores
dados por la ecuación (6.1) para el momento de inercia de la sección

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________230
transversal integra y por la ecuación (6.8) para el momento de inercia del sector
angular; El momento de inercia de la sección triangular está dado por la
ecuación (6.9) excepto cuando 2/πθ nm = con =n 1, 3, 5, … , en cuyo caso
está dado por la ecuación (6.10).
4
4rIstci π= (6.1)
stsastcistgfc IIII +−= (6.7)
−−
−=
4
22
24
4ifif
sa
sensenrI
θθθθ (6.8)
( ) ( ) ( )[ ]333
cos12 ifm
st sensenrpr
I θθθ
−−
= (6.9)
( )ist
prrI θcos
2
3−= (6.10)
L 1 A
L
Figura 6.7.- Diagrama unifilar del árbol fracturado simplemente apoyado.
La variación direccional local de la flexibilidad del árbol está dada por la
ecuación

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________231
433
12CxCx
PyEI stgfc ++= (6.16)
En la cual 3C y 4C se obtienen a partir de las ecuaciones
2
13 24
+−=A
LP
C (6.18)
( ) ( ) 133
12113
14 1212LCL
PI
ICLCL
PC
stci
stgfc−−
++= (6.20)
Las constantes de integración 1C y 2C se obtienen de las ecuaciones
( ) ( )213
211 44
LP
II
CLP
Cstgfc
stci −
+= (6.19)
02 =C (6.17)
P es la carga aplicada, stciI es el momento de inercia de la sección transversal
circular integra dado por la ecuación (6.1), stgfcI es el momento de inercia de la
sección transversal generada por la fractura cordal dado por la ecuación (6.7).
Con la ecuación (6.16) se obtiene la flexibilidad direccional, para diferentes
profundidades de ranura, como se muestra en la Tabla 6.2 y en la Figura 6.8.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________232
Tabla 6.2.- Variación direccional de la flexibilidad.
θm en
grados (y/P)
p=0.5
(y/P)
p=1.0
(y/P)
p=1.5
(y/P)
p=2.0
(y/P)
p=2.5
(y/P)
p=3.0
0 0.087098 0.087098 0.087100 0.087102 0.087105 0.087109
30 0.087098 0.087100 0.087103 0.087106 0.087110 0.087115
60 0.087100 0.087105 0.087110 0.087117 0.087123 0.087129
90 0.087101 0.087107 0.087115 0.087124 0.087132 0.087139
120 0.087100 0.087105 0.087110 0.087117 0.087123 0.087129
150 0.087101 0.087106 0.087113 0.087120 0.087127 0.087134
180 0.087098 0.087098 0.087100 0.087102 0.087105 0.087109
210 0.087098 0.087100 0.087103 0.087106 0.087110 0.087115
240 0.087100 0.087105 0.087110 0.087117 0.087123 0.087129
270 0.087101 0.087107 0.087115 0.087124 0.087132 0.087139
300 0.087100 0.087105 0.087110 0.087117 0.087123 0.087129
330 0.087098 0.087100 0.087103 0.087106 0.087110 0.087115
360 0.087098 0.087098 0.087100 0.087102 0.087105 0.087109
FLEXIBILIDAD
0.087070
0.087080
0.087090
0.087100
0.087110
0.087120
0.087130
0.087140
0.087150
0 45 90 135 180 225 270 315 360
θm en grados
MIL
ÍMET
RO
S/K
g
Serie1Serie2Serie3Serie4Serie5Serie6
Figura 6.8.- Variación direccional de la flexibilidad.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________233
7.- VALIDACIÓN TEÓRICO EXPERIMENTAL.
Los resultados obtenidos se compararán entre si y con los establecidos en al
menos un artículo sobre el tema.
Para validar los resultados del análisis del desalineamiento entre árbol y
chumaceras, éstos se compararán con los encontrados en la investigación
documental.
La validación de la flexibilidad, se hará tomando como referencia la función
universal de la profundidad adimensional de la fractura, así como la flexibilidad
misma. Los valores de tal función, obtenidos en la investigación documental y
en el desarrollo experimental; así como la flexibilidad obtenida en el desarrollo
experimental y en el estudio analítico, se compararán cualitativa y
cuantitativamente.
En el aspecto cualitativo se considerará que los valores de la función obtenidos
del estudio analítico, consideran al árbol como totalmente elástico; es decir, no
consideran el comportamiento plástico que se presenta por fatiga y
concentración de esfuerzos en la zona de la fractura debido a su apertura y
cierre, que se repiten cíclicamente al girar el árbol.
Dado que la variación de la flexibilidad en la investigación documental y en el
desarrollo experimental, se considera desde su valor para cuando la fisura esta
arriba, con respecto a cuando la fisura está abajo (por ser máxima); en el
estudio analítico se considera tal variación desde su valor para cuando la fisura
está horizontal, con respecto a cuando la fractura está hacia abajo.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________234
7.1.- COMPARACIÓN DEL DESALINEAMIENTO. El espesor de la capa de lubricante depende de la coordenada axial Z, y del
ángulo θ
( ) ( ) ( ) ( )[ ]0costan,tan,tan,tan, γγθβαβαθ +−+= ZECH r (3.23)
Nikolakopoulos y Papadopoulos [1], usaron para el espesor de la capa de
lubricante la expresión
( ) ( ) ( ) ( )[ ]00coscos01, ϕθψϕθψθεθ +++++= senh xyZZ
La cual es similar a nuestra expresión (3.23). La principal diferencia consiste en
la expresión utilizada para los parámetros de desalineamiento y también en que
nuestra [2] expresión es una función no lineal de Z.
7.2.- COMPARACIÓN DE LA FLEXIBILIDAD.
Los resultados obtenidos en el desarrollo experimental, se comparan contra los
obtenidos por Mayes [3], encontrados en la investigación documental. Se
tomará como referencia la función universal.
Los resultados obtenidos en el estudio analítico, se comparan contra los
obtenidos en el desarrollo experimental. Se tomará como referencia la
flexibilidad misma.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________235
7.2.1.- Comparación Documental Experimental.
En la Figura 7.1 se muestran los resultados obtenidos por Mayes. Para un valor
de la profundidad adimensional de la fractura 5.0=µ , la función adimensional,
aproximada, de la profundidad de la fractura es 0.89.
Figura 7.1.- Función adimensional de la profundidad de la fractura ( )µf contra la profundidad
adimensional de la fractura µ .

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________236
Para el desarrollo experimental descrito en el capítulo 5, el valor obtenido para
dicha función fue de 0.929687341.
Se puede aseverar que los resultados de la investigación documental y del
desarrollo experimental, son comparativamente aceptables.
7.2.2.- Comparación Experimental Analítica.
En la Tabla 7.1 se muestran los resultados obtenidos en el desarrollo
experimental, así como los obtenidos en el estudio analítico, para un valor de la
profundidad adimensional de la fractura 5.0=µ .
Tabla 7.1.- Comparación de valores de flexibilidad.
Procedimiento Peso
acumuladoFlexibilidad con fractura
Teórico 0.8073 0.087105 0.087132
Experimental 0.8073 0.103827573 0.105400718
Factor de Concentración de
esfuerzos
1.19198412 1.20966978
Orientación de la fractura Fractura
Horizontal
Fractura
abajo
Para comparar la flexibilidad obtenida teóricamente, con la obtenida
experimentalmente, es necesario hacer referencia a la Tabla 7.1. Dado que el
análisis teórico se hizo considerando comportamiento elástico sin
concentración de esfuerzos, es de esperarse que las flexibilidades difieran. Si

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________237
la fractura es la misma estando horizontal o estando abajo, el factor de
concentración de esfuerzos debe ser el mismo para ambas posiciones. En la
tabla, este factor de concentración de esfuerzos se calculó dividiendo la
flexibilidad experimental entre la flexibilidad teórica. Nótese que los factores de
concentración de esfuerzos son comparativamente iguales. Adicionalmente,
dado que cuando la fractura está horizontal puede haber contacto entre las
caras, se esperaba que el factor de concentración de esfuerzos fuese menor
que cuando la fractura está abajo. Puesto que la diferencia entre los factores
de concentración de esfuerzo fue mínima y fue en el sentido esperado, se
puede aseverar que la separación del comportamiento elástico (teórico) y del
comportamiento elástico y plástico (experimental) es adecuada y los resultados
se validan mutuamente.
7.3.- SUMARIO DEL CAPÍTULO 7.
Dada la similitud de la ecuación obtenida para el claro radial en condición de
desalineamiento expresada por la ecuación
( ) ( ) ( ) ( )[ ]0costan,tan,tan,tan, γγθβαβαθ +−+= ZECH r (3.23)
Con la reportada por Nikolakopoulos
( ) ( ) ( ) ( )[ ]00coscos01, ϕθψϕθψθεθ +++++= senh xyZZ .
Considerando que el valor experimental obtenido para la función adimensional
de la profundidad de la fractura (0.929687341) difiere muy poco con respecto al
reportado por Mayes (0.89).
Tomando en cuenta que la diferencia entre la flexibilidad obtenida por análisis
elástico, tanto para fractura orientada horizontalmente como para fractura

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________238
orientada verticalmente, difieren proporcionalmente respecto a las
correspondientes obtenidas experimentalmente.
Se puede concluir que los experimentos y los cálculos se validan mutuamente.
Referencias del capítulo 7.
[1] Nikolakopoulos, P. G., Papadopoulos, C. A., Controllable Misaligned Journal
Bearing, Lubricated with Smart Fluids, J. Intelligent Materials, Systems and
Structures. Vol. 8, 1997, pp.125-137.
[2] Nossov, V. R., Gómez, M. J. C., Jiménez, R. H., Campo de Presión del
Lubricante en Chumaceras Desalineadas de Máquinas Rotatorias, Sexto
Congreso Nacional de Ingeniería Electromecánica y de Sistemas, Vol. 1, No.
1, 2001, pp.273-280.
[3] Mayes, I. W., y Davies, W. G. R., Analysis of the Response of a Multi-Rotor-
Bearing System Containing a Transverse Crack a Rotor, J. of Vib., Acoustics,
and Reliability in Design, Vol. 106/143, 1984.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________239
8.- TRABAJO FUTURO.
Como trabajos complementarios, para ampliar el conocimiento sobre los
sistemas rotor – chumaceras, se efectuarán los siguientes:
1. Determinar analíticamente la constante de resorte dinámica y su
correspondiente variación direccional; de un árbol flexible,
simplemente apoyado sobre chumaceras rígidas,
desbalanceado, alineado y con fractura cordal transversal.
2. Determinar, por medio de elemento finito, la constante de
resorte dinámica y su correspondiente variación direccional; de
un árbol flexible, simplemente apoyado sobre chumaceras
rígidas, desbalanceado, alineado y con fractura cordal
transversal.
3. Determinar analíticamente la variación direccional de la
constante de resorte estática y dinámica; de un árbol flexible,
simplemente apoyado sobre chumaceras rígidas,
desbalanceado, alineado y con fractura cordal diagonal.
4. Determinar por medio de elemento finito, la variación direccional
de la constante de resorte estática y dinámica; de un árbol
flexible, simplemente apoyado sobre chumaceras rígidas,
desbalanceado, alineado y con fractura cordal diagonal.
5. Caracterizar, usando elemento finito, el comportamiento del
fluido (alta presión a la entrada y alta velocidad a la salida) en
una boquilla cónica para corte de materiales, y compararlo con
los resultados a partir de expresiones ya obtenidas
analíticamente.
A continuación se incluye un cronograma, por trimestres, en el que se
calendarizan las diferentes actividades a desarrollar.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________240
Tabla 8.1.- Programación de trabajos futuros.
No.
TRIMESTRE
13121110987654321
5
4
3
2
1
Act.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________241
9.- CONCLUSIONES.
La detección temprana de fracturas transversales y al centro de árboles
flexibles desbalanceados, con una masa al centro, rotando simplemente
apoyados sobre chumaceras soporte rígidas, sin vibraciones debidas a
elementos mecánicos tales como pedestales de chumaceras o coples, ni
vibraciones auto –excitadas debido al contacto; puede lograrse si se pone
atención a las resonancias armónicas, superarmónicas, subarmónicas, súper-
subarmónicas, y combinadas; que se generan por la variación direccional de la
flexibilidad del árbol.
El comportamiento elástico de un árbol se puede caracterizar, como una
función del ancho y de la profundidad de la fractura.
La variación direccional de la flexibilidad de un árbol es una función del
cuadrado del ancho de la fractura, así como del cociente del momento de
inercia de la sección transversal generada por la fractura cordal entre el
momento de inercia de la sección transversal circular integra, y de la inversa
del cociente anterior.
De la comparación de resultados analíticos, experimentales, y documentales;
se concluye que las expresiones deducidas, que excluyen el comportamiento
plástico, conducen a resultados razonablemente aceptables, ya que las
variaciones además de mínimas son cualitativamente lógicas, considerando el
comportamiento plástico presente en los resultados experimentales y
documentales, así como el comportamiento geométrico direccionalmente
distinto debido a la apertura y cierre de la fractura.
Las curvas de resonancia con un desbalance comparativamente grande y de
lado de la fractura, exhiben una región de gran amplitud y, como resultado,
aparece una zona inestable. Por el contrario, cuando el desbalance está de

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________242
lado opuesto al de la fractura, la región inestable desaparece y sólo aparecen
vibraciones de estado estable.
En las curvas de resonancia con un desbalance comparativamente pequeño
aparece una zona inestable para cualquier dirección del desbalance.
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________243
10.- ANEXOS.
10.1.- ESTUDIO METALURGICO DEL ROTOR. Este trabajo fue realizado por el Dr. Lucio Vázquez Briseño, en el Departamento de Materiales de la Universidad Autónoma Metropolitana Unidad Azcapotzalco. Se proporcionó una barra de acero para la determinación de la dirección de laminado (rolado) y de la micro estructura. La barra presenta un acabado brillante propio de una barra laminada enfrío después de haber sido laminada en caliente. Se cortó una sección de la barra de un cm. de longitud y a continuación se corto longitudinalmente en dos mitades. Las dos mitades se montaron en baquelita, se pulieron a espejo con lijas de grados 240 hasta 600, a continuación se pulieron las dos secciones espejo con una suspensión acuosa de alúmina de 0.050 micras. Una mitad se macro atacó con ácido clorhídrico 1:1 a 80°C durante media hora y después de enjuagarse con agua y alcohol y secarse se tomaron dos fotografías, una de ellas de la sección completa (Figura A1) y otra de una sección a 10 aumentos (2). En las dos fotografías se observan las líneas de flujo del ataque de las trazas de las fronteras del grano austenítico producido a la temperatura de laminación en caliente. Las líneas de flujo indican la dirección de laminación y son paralelas a la dirección longitudinal de la barra. La Figura A2 muestra más claramente la direccionalidad. La segunda mitad se atacó ligeramente con una solución de ácido nítrico en alcohol (nital) al 2 % (2 % de ácido nítrico y 98 % de alcohol) y se fotografió a 100 aumentos, se pueden observar inclusiones alargadas redondeadas en los extremos. Las inclusiones se alargan durante la deformación en caliente y conservan esa forma aunque el material sea sujeto a tratamiento térmico. La micrografía a 100x de la Figura A3 muestra las inclusiones. Esta misma mitad se atacó más intensamente y se observó a 100 y a 500 aumentos. La Figura A4 a 100 aumentos muestra la micro estructura destacando la dirección de laminación en el sentido longitudinal de la barra. A 500 aumentos se aprecia que la micro estructura consiste de cementita esferoidizada en una matriz ferrítica, Figura A5. La ferrita es una solución de
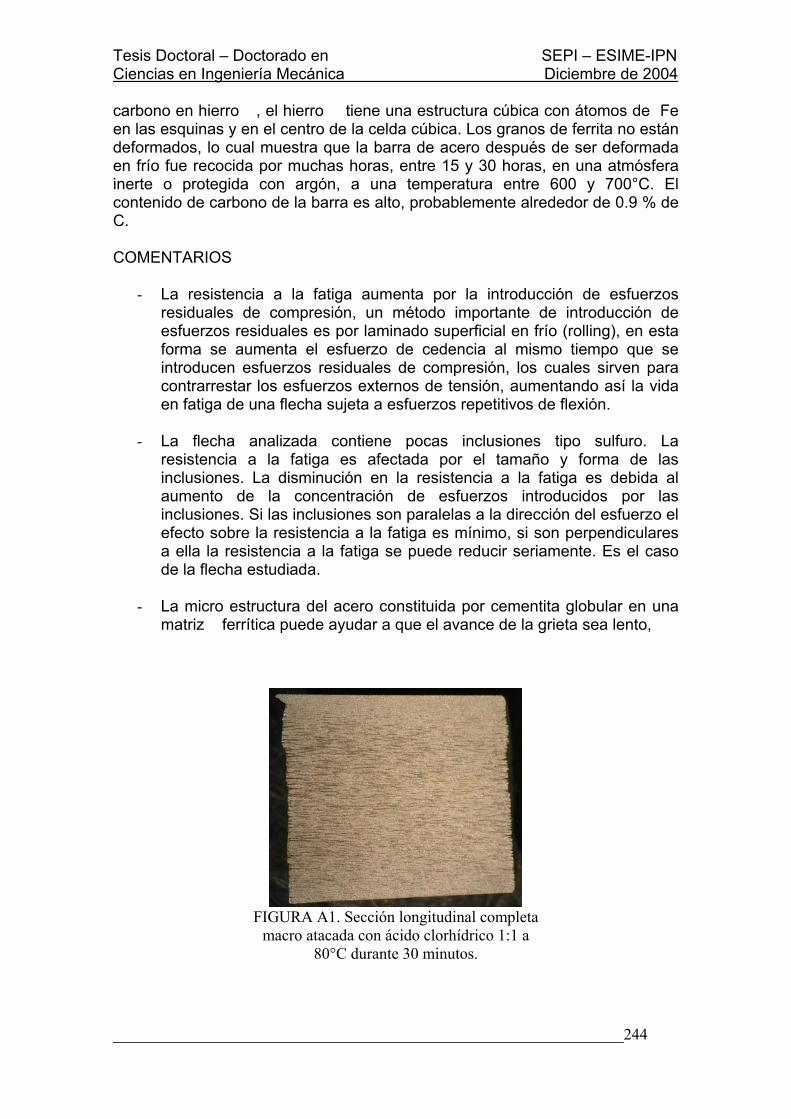
Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________244
carbono en hierro �, el hierro � tiene una estructura cúbica con átomos de Fe en las esquinas y en el centro de la celda cúbica. Los granos de ferrita no están deformados, lo cual muestra que la barra de acero después de ser deformada en frío fue recocida por muchas horas, entre 15 y 30 horas, en una atmósfera inerte o protegida con argón, a una temperatura entre 600 y 700°C. El contenido de carbono de la barra es alto, probablemente alrededor de 0.9 % de C. COMENTARIOS
- La resistencia a la fatiga aumenta por la introducción de esfuerzos residuales de compresión, un método importante de introducción de esfuerzos residuales es por laminado superficial en frío (rolling), en esta forma se aumenta el esfuerzo de cedencia al mismo tiempo que se introducen esfuerzos residuales de compresión, los cuales sirven para contrarrestar los esfuerzos externos de tensión, aumentando así la vida en fatiga de una flecha sujeta a esfuerzos repetitivos de flexión.
- La flecha analizada contiene pocas inclusiones tipo sulfuro. La
resistencia a la fatiga es afectada por el tamaño y forma de las inclusiones. La disminución en la resistencia a la fatiga es debida al aumento de la concentración de esfuerzos introducidos por las inclusiones. Si las inclusiones son paralelas a la dirección del esfuerzo el efecto sobre la resistencia a la fatiga es mínimo, si son perpendiculares a ella la resistencia a la fatiga se puede reducir seriamente. Es el caso de la flecha estudiada.
- La micro estructura del acero constituida por cementita globular en una
matriz ferrítica puede ayudar a que el avance de la grieta sea lento,
FIGURA A1. Sección longitudinal completa
macro atacada con ácido clorhídrico 1:1 a 80°C durante 30 minutos.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________245
FIGURA A2. Sección longitudinal macro atacada con ácido clorhídrico 1:1 a 80°C durante 0.5 horas
FIGURA A3. Sección longitudinal atacada
ligeramente con nital 2 % para observar inclusiones.
FIGURA A4. Micro estructura de sección longitudinal
a 100 X atacada con nital 2%. Las manchas oscuras son inclusiones de sulfuros.

Tesis Doctoral – Doctorado en SEPI – ESIME-IPN Ciencias en Ingeniería Mecánica Diciembre de 2004
________________________________________________________________246
FIGURA A5. Micro estructura de sección longitudinal
a 500X, ataque con nital 2 %. La micro estructura está formada por partículas globulares de cementita,
carburo de hierro (Fe3C) en una matriz de ferrita.
10.2.- CONDICIÓN DE CONTACTO.
La condición de mayor probabilidad de contacto entre las caras de la fractura, es cuando 090=mθ . Para determinar si se tocan o no, de la ecuación (5.15) se puede calcular ( )dxdy / en 1Lx = y con 5.2=p milímetros; al hacerlo se obtiene ( ) =dxdy / 9.84335x10-7, valor que NO implica contacto entre las caras de la fractura. Para que el contacto exista sin cambiar la geometría, se requeriría que =E 0.194607226 Kg./mm2; es decir, se requeriría que la rigidez del material fuese muy baja.