the describing function
TRANSCRIPT

2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 1/21
The Describing Function
A Tool for Predicting Nonlinear System Oscillation
Why Nonlinear Analysis?
An Oscillating System
Another Nonlinearity - A Saturating Amplifier
Saturating Amplifier Example
Summary
Problems
You are at: Nonlinear Systems - Oscillating Nonlinear Systems - The Describing Function
Click here to return to the Table of Contents
Introduction - Why Nonlinear Analysis?
Control system analysis is based on the concept that the system is linear. That's not
always true, but the reason that designers do that is that there are very few analytical
techniques that can be used to predict the behavior of nonlinear systems. Prediction is the
key here. When control systems are designed it is imperative that users and customers know
how the system will behave in all situations. Linear analysis techniques are good in that way
because you can guarantee stability, for example. You would know that the system is stable
and that the stability of the system was in no way dependent upon the conditions in the
system, either the input(s) or the initial state of the system.
Nonlinear systems present a problem in that regard. Here are some facts about
nonlinear systems.
Nonlinear systems can exhibit instability when certain inputs are applied but may be
well behaved (stable) for all other inputs.
Nonlinear systems often have limit cycles, in which sustained oscillations occur but only
at a particular amplitude and frequency.
Linear systems might oscillate at a particular frequency, but oscillation at a
particular amplitude is a phenomenon peculiar to nonlinear systems.
There are very few analytical techniques that can be used to predict behavior of
nonlinear systems. For comparison, many universities teach courses in Linear Systems,
and in those courses general techniques for analysis of linear systems are taught.
General techniques for analysis of nonlinear systems are hard or impossible to find and
2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 2/21
we are often left to use very specific techniques for special situations and we are not
able to make general statements.
To make predictions of nonlinear system behavior designers often use
simulations. However, doing a simulation of a nonlinear system only tells the
designer about that situation. There could be other situations in which the system
misbehaves, and the designer will only find that out if s/he does a simulation for
that specific situation.
In this lesson we are going to examine a technique that will permit prediction of limit
cycles in certain situations.
An Oscillating System
We will begin by examining a very simple system. The system is nonlinear and has the
following characteristics.
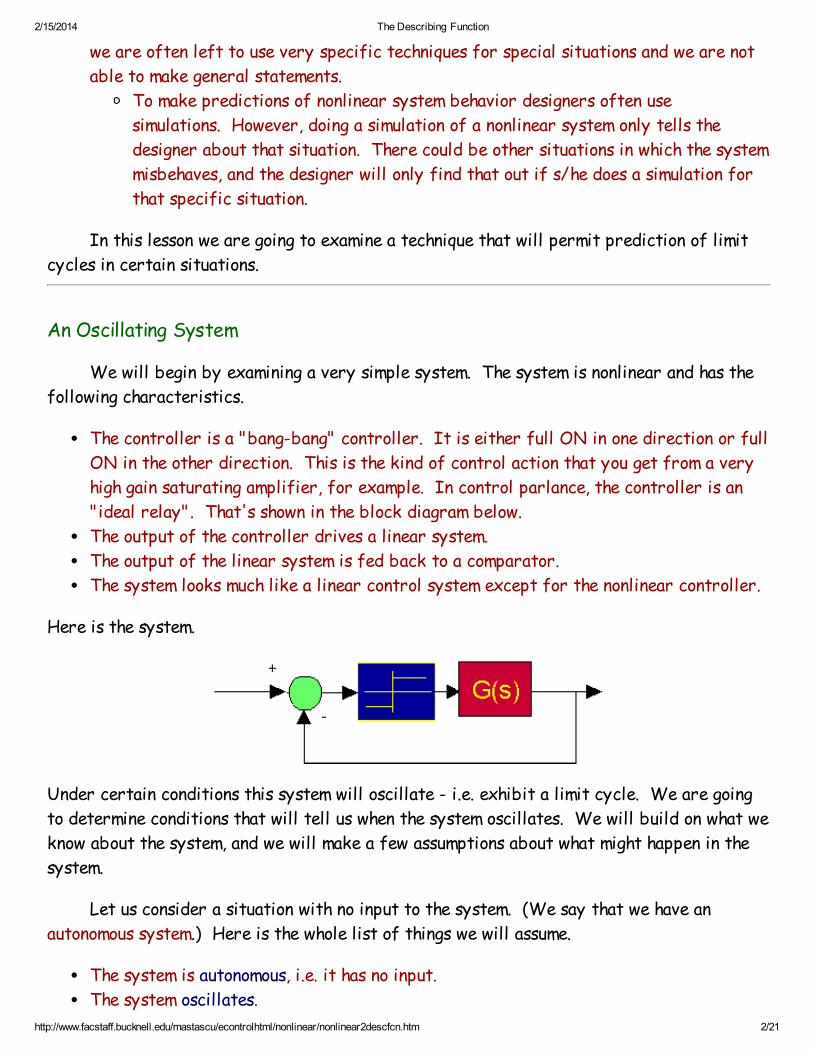
The controller is a "bang-bang" controller. It is either full ON in one direction or full
ON in the other direction. This is the kind of control action that you get from a very
high gain saturating amplifier, for example. In control parlance, the controller is an
"ideal relay". That's shown in the block diagram below.
The output of the controller drives a linear system.
The output of the linear system is fed back to a comparator.
The system looks much like a linear control system except for the nonlinear controller.
Here is the system.
Under certain conditions this system will oscillate - i.e. exhibit a limit cycle. We are going
to determine conditions that will tell us when the system oscillates. We will build on what we
know about the system, and we will make a few assumptions about what might happen in the
system.
Let us consider a situation with no input to the system. (We say that we have an
autonomous system.) Here is the whole list of things we will assume.
The system is autonomous, i.e. it has no input.
The system oscillates.
2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 3/21
At any point in the system there will be a periodic signal.
G(s) is a system that is a low-pass filter.
In actuality it may be a motor, or some other device that consumes large chunks
of power, but the important point is the form of the transfer function. When we
say that the system is a low-pass filter we mean that it has a DC gain, and that
the frequency response drops off as you go up in frequency.
Now, it isn't obvious, but under those conditions, if the system oscillates, then the
oscillations at the output of the closed loop system will be almost sinusoidal. We need to
work through the argument that leads to that conclusion.
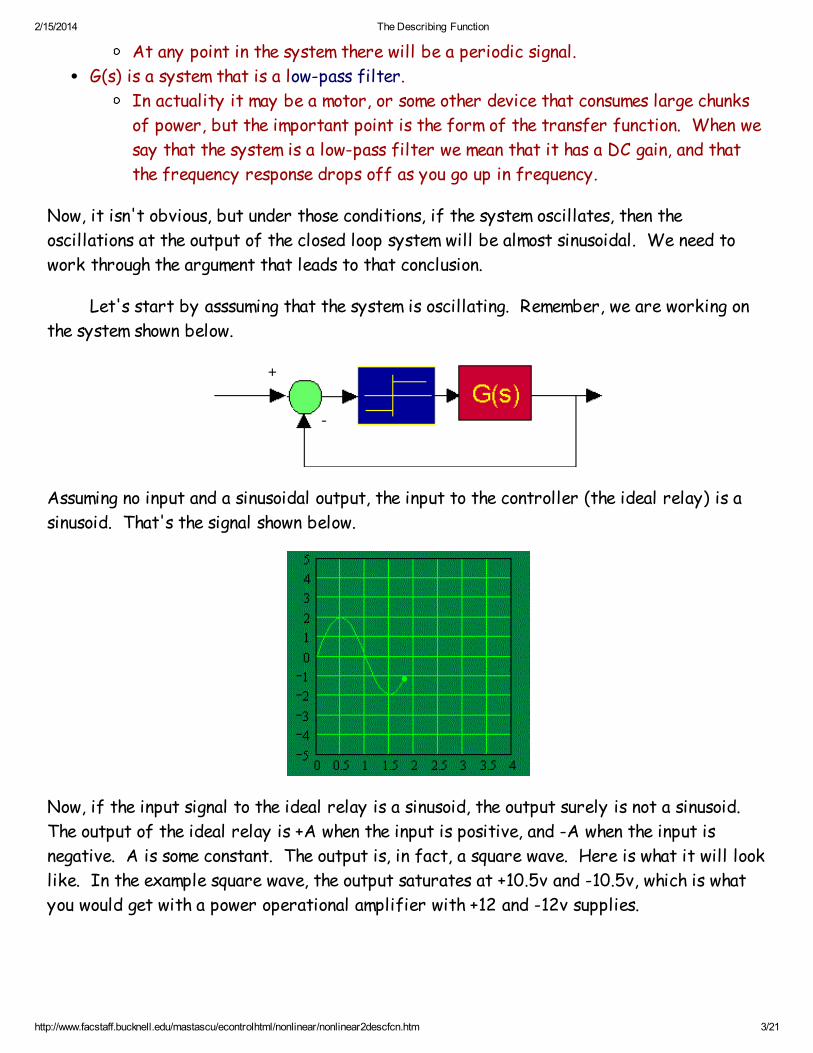
Let's start by asssuming that the system is oscillating. Remember, we are working on
the system shown below.
Assuming no input and a sinusoidal output, the input to the controller (the ideal relay) is a
sinusoid. That's the signal shown below.
Now, if the input signal to the ideal relay is a sinusoid, the output surely is not a sinusoid.
The output of the ideal relay is +A when the input is positive, and -A when the input is
negative. A is some constant. The output is, in fact, a square wave. Here is what it will look
like. In the example square wave, the output saturates at +10.5v and -10.5v, which is what
you would get with a power operational amplifier with +12 and -12v supplies.

2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 4/21
Now, you have to consider what happens to the square wave as it goes through the transfer
function, G(s). Remember that we are assuming that G(s) is the transfer function of a low-
pass filter. The periodic signal out of the ideal relay can be described by a Fourier Series.
If we have a square wave that "flips" between +A and -A, the Fourier series is given by:
What is important here is that the periodic signal - the square wave above - is composed of
sinusoids at different frequencies and that G(s) is the transfer function of a low-pass
filter. Here's what we need to argue and be sure of.
When the system oscillates, the output of the ideal relay - also the input to G(s) - is
periodic.
Periodic signals can be represented by a Fourier Series representation.
G(s) is a low-pass filter.
G(s) will selectively filter out the higher frequencies in the Fourier Series, and it will
slectively pass the lower frequencies.
Now, we are going to examine a particular system. Here is the block diagram of the
system. This block diagram is taken from a Simulink block diagram that was used to
calculate the response of the system. (Note, in this system, the ideal relay had no dead zone,
and the output amplitudes were +10.5 and -10.5, which would correspond to a saturating
operational amplifier with 12v supplies.)
2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 5/21
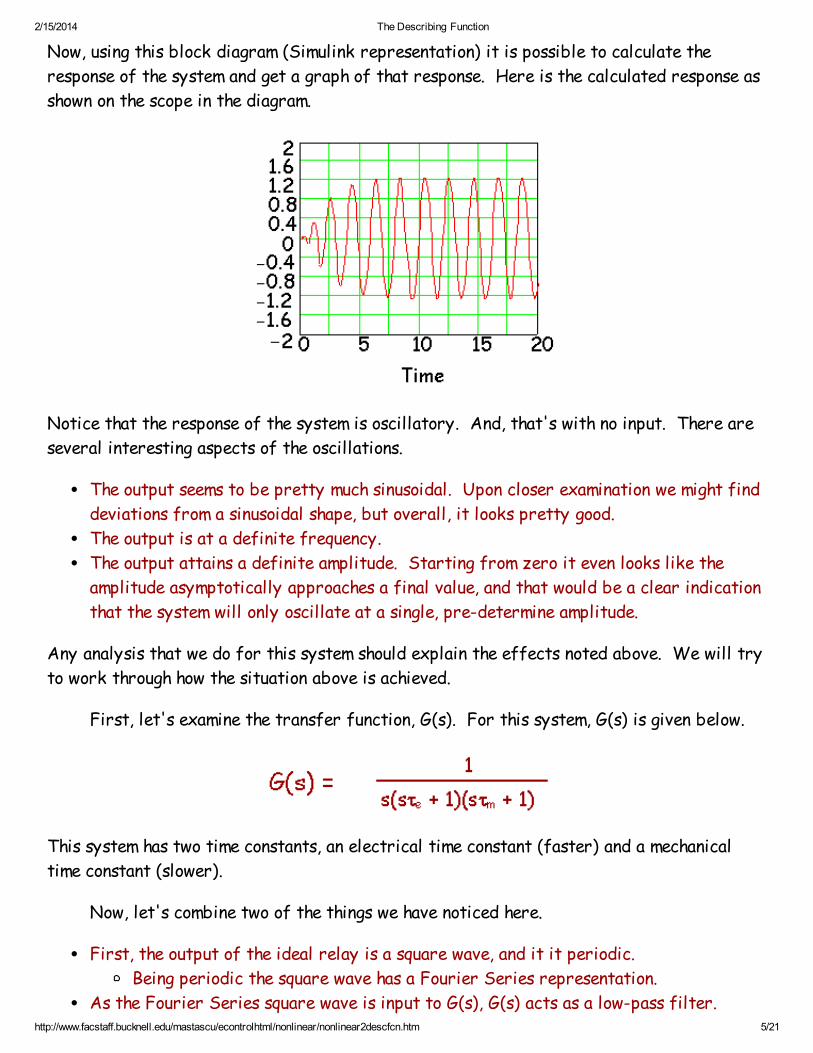
Now, using this block diagram (Simulink representation) it is possible to calculate the
response of the system and get a graph of that response. Here is the calculated response as
shown on the scope in the diagram.
Notice that the response of the system is oscillatory. And, that's with no input. There are
several interesting aspects of the oscillations.
The output seems to be pretty much sinusoidal. Upon closer examination we might find
deviations from a sinusoidal shape, but overall, it looks pretty good.
The output is at a definite frequency.
The output attains a definite amplitude. Starting from zero it even looks like the
amplitude asymptotically approaches a final value, and that would be a clear indication
that the system will only oscillate at a single, pre-determine amplitude.
Any analysis that we do for this system should explain the effects noted above. We will try
to work through how the situation above is achieved.
First, let's examine the transfer function, G(s). For this system, G(s) is given below.
This system has two time constants, an electrical time constant (faster) and a mechanical
time constant (slower).
Now, let's combine two of the things we have noticed here.
First, the output of the ideal relay is a square wave, and it it periodic.
Being periodic the square wave has a Fourier Series representation.
As the Fourier Series square wave is input to G(s), G(s) acts as a low-pass filter.

2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 6/21
That implies that signals will be attenuated as they pass through G(s).
The higher frequency signals will be attenuated more.
If G(s) has a good drop-off, the output of G(s) may well be pretty much the
fundamental of the Fourier Series. Higher frequency terms will be attenuated,
possible pretty severely.
If G(s) filters out everything but the fundamental (and we will assume that for now)
then, we can focus on the fundamental.
Since the system oscillates with no input, the output of the system will be the
input of the system - after we account for the sign change in the comparator.
That means that the output magnitude has to equal the input magnitude.
If also means that the output phase has to be shifted by -180o.
Now, given all of the above, the first thing we are going to do is to compute the
frequency at which the phase shifts by exactly -180o. We have chosen the transfer function
to be one where we can do that analytically (i.e. do a pencil and paper calculation).
Normally, you would probably have to use a Bode' plot for G(s) to determine that frequency.
So, let's look at the transfer function again. First, we will expand the denominator.
We do that because we will be better able to compute the point where phase shifts by
exactly -180o. (Click here if you want a the details on these computations in a shorter web
page.)
Since we are interested in frequency response we let s = jw. Then the frequency
response function, G(jw), becomes:
We want to compute the frequency at which the phase shifts by exactly -180o. Notice that
we always get exactly -90o from the integrator term, so we need to compute the frequency
for which we get -90o from the quadratic term. We'll get exactly -90o from the quadratic
term when the real terms disappear. To do that we must have:
-w2tetm+ 1 = 0
or:

2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 7/21
This should give us the frequency of oscillation of the closed loop system. Let's check that
for the example system. In the example system, we had:
te= 0.1
tm= 1.0
Computed oscillation frequency: wo= 3.16 rad/sec, or f = 0.5Hz.
Measured oscillation frequency: 5 cycles from t = 7 sec. to t = 18 sec. (estimated from
the graph above).
fmeas = 5/11 = 0.45Hz.
Given the accuracy of our estimates, this looks to be pretty close.
Now, that's the frequency, but we need to know the amplitude as well.
The amplitude of the oscillations can be computed fairly easily in this situation. We
know the Fourier Series of the relay output. That is repeated below.
The fundamental is 4A/p . Let us work on only the fundamental frequency component for a
while. That component is at a frequency of:
We can compute how the fundamental component changes as it passes through G(s).
Remember that the frequency response is given by:
And, at the oscillation frequency, wo, the magnitude of the frequency response can be
computed as:
Then, note that at the oscillation frequency, wo, we have:

2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 8/21
And, for the time constants for the example system, this works out to be 0.091. That means
that the output of G(s) will have a fundamental component with a magnitude of:
.091(4A/p )
For the system we simulated, we chose A = 10.5, which is about what you would get from a
saturating operational amplifier with +12v and -12v supplies. That yields an amplitude of
1.215v. Comparing that to the response, the amplitude seems to be on the money.
So, it seems like we have a good method for predicting the magnitude and frequency of
oscillations in this kind of system. There are just a few unresolved questions.
We didn't account for the higher frequency components in the signal.
We may not be able to proceed as easily if we don't have an ideal relay. We need to
be able to handle other kinds of nonlinearities.
Let's get the first question out of the way. Higher frequency components must be
accounted for, and we haven't done that. Since there is no component at twice the
fundamental, let's look at the component at three times the fundamental. At that frequency,
the frequency response has a magnitude of .008. Now, if we compute the magnitude of this
component we have:
Magnitude of component at 3xfundamenal = .008(4A/3p )
= .036v
So, comparing the first few components of the output signal we have (after computing

2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 9/21
another point):
Output Freq Magnitude
Fund 1.215v
3xFund .036v
5xFund .0057v
So, the output isn't a pure sine wave, but the harmonic content is not that large. Our
assumption that the output was sinusoidal was a fairly good assumption.
So, our conclusion has to be that this is a reasonable way to predict oscillations in a
system with an ideal relay. Here are the main points in the argument.
The controller is a "bang-bang" - i.e. an "ideal relay" - controller. It is either full
ON in one direction or full ON in the other direction.
The output of the controller drives a linear system.
The output of the linear system is fed back to a comparator.
That means that the block diagram of the system is the one below.
The process you use to analyze the system is as follows:
Assume that the relay output is a symmetrical square wave.
Determine where G(jw) has a phase shift of -180o. Call that frequency wo.
If the phase shift never reaches -180o, then the system probably does not
oscillate.
Calculate how large the fundamental signal is coming out of the transfer function G(s)
at wo.
Check that harmonics are not large because there is an assumption that the output is a
sine wave, and anything else might modify the relay input in a way that invalidates our
assumption of a symmetrical square wave out of the relay.
Other Nonlinearities

2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 10/21
If the nonlinearity is not a ideal relay, then the analysis above must be modified.
Another common situation would be a saturating amplifier. In that case, the block diagram
would look like the one below.
Now, if we want to determine whether the system oscillates we need to account for the
saturating amplifier. However, the output of the saturating amplifier is more complex than a
square wave, and the Fourier Series for the output will now have a fundamental component
that has a magnitude dependent upon the magnitude of the input sinusoid. The problem now is
to incorporate that fact into our analysis.
Let's assume that there is a sinusoid at the input of the nonlinearity - the saturating
amplifier. Here is a plot of the output of the saturating amplifier against the input
amplitude, A. In the plot the saturation levels are -10.5v and +10.5v.
Shown below is an example of a sine wave that saturates at +10.5 and at -10.5v. You can set
the amplitude of the sine wave by typing in a value in the text box provided. Be prepared
for a little "noise" when you type. The sine wave can react instantaneously. Click the
button to start after you type in your first value, but you can change amplitude "on the fly".

2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 11/21
We want to be able to compute the fundamental component of a general signal like the one
above, where the size of the sine part is variable, and the saturation takes place at a fixed
level, but at at different angle within the sine wave as the size/amplitude of the sine part
varies.
Let's consider what we are going to do.
We will assume that the signal resembles the one above. In particular:
We assume that they system is operating so that the saturation region is reached.
The symmetry of the signal above will ensure that it is composed of only sines,
with no cosine components.
The symmetry of the signal above also ensures that only odd harmonics are
present.
We will represent the signal by the following:
SatSine(t) = Asin(2pft) for 0 < t < ts.
SatSine(t) = Asat for ts < t < T/4.
We will compute the sine component of the fundamental.
We will assume what is a standard/typical representation of the Fourier Series
in which the typical term is ancos(2pnft) + bnsin(2pnft).
Givne that, the fundamental component is give by the expression below.
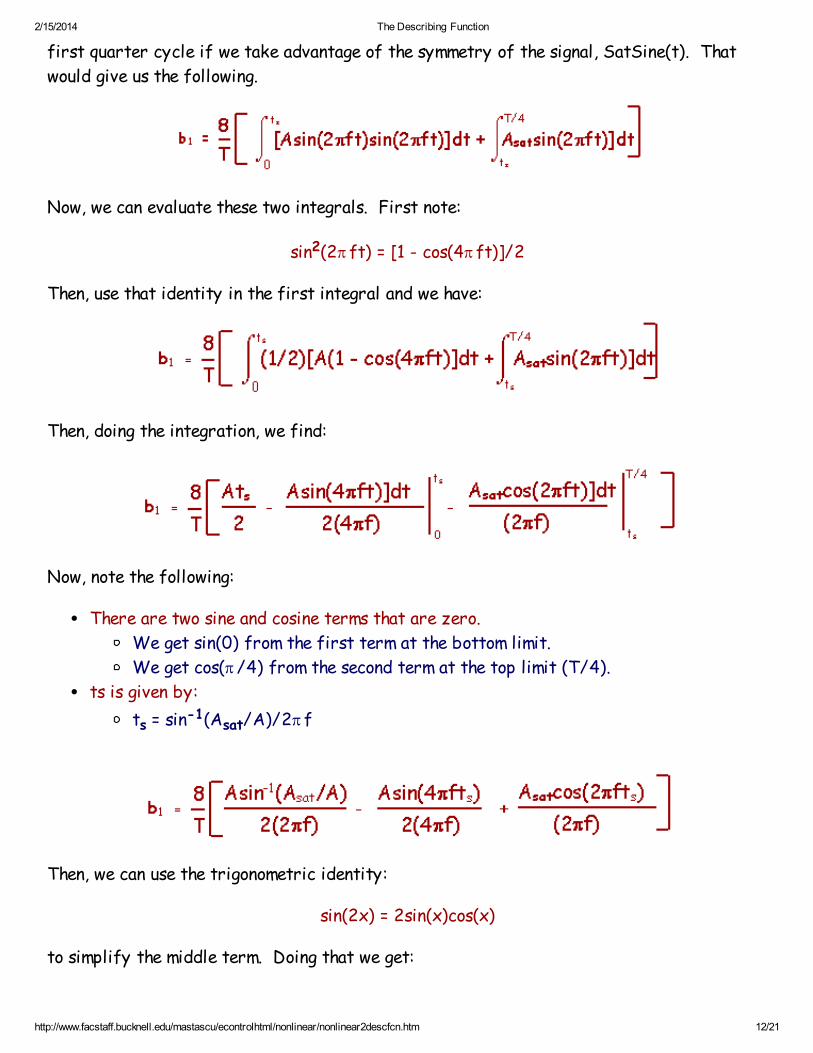
Actually, we can simplify the integral a little bit because we only need to integrate over the
2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 12/21
first quarter cycle if we take advantage of the symmetry of the signal, SatSine(t). That
would give us the following.
Now, we can evaluate these two integrals. First note:
sin2(2pft) = [1 - cos(4pft)]/2
Then, use that identity in the first integral and we have:
Then, doing the integration, we find:
Now, note the following:
There are two sine and cosine terms that are zero.
We get sin(0) from the first term at the bottom limit.
We get cos(p/4) from the second term at the top limit (T/4).
ts is given by:
ts = sin-1(Asat/A)/2pf
Then, we can use the trigonometric identity:
sin(2x) = 2sin(x)cos(x)
to simplify the middle term. Doing that we get:

2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 13/21
Now, we can take advantage of what we know about some of these quantities. For example,
we know:
Asin(2pfts) = Asat
So:
sin(2pfts) = Asat/A
Then, we can say:
Then, finally, we have:
or:
Now, sum up what we know.
If the input to a saturating element is a sinusoidal signal, then we have:
The output is a sine wave as long as the saturating element does not saturate. For
our calculations above, we have assumed a gain of 1.0 in this situation.
When the input is large enough to saturate the saturating element, the output has
a Fourier series and the first term has the magnitude given above as b1 above.
In doing the analysis above, we assumed that the saturating element had a gain of 1.0
until it saturated, and then saturated at a value of Asat.
The next question is how do we use the information we have above. Let's go back to the
system we began this section with. That's shown below.

2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 14/21
Now, let's note the following.
First, we assume that the input is zero, and that we want to know whether or not the
system will oscillate.
Secondly, we note that, if the system oscillates, there will be a sort of "steady state"
in the system. In other words, the system may oscillate, but the oscillations will not
grow or decay.
If the oscillations do not grow or decay, then as we go around the loop (say we start
from the input to the saturating element) the signals may get larger or smaller, but by
the time we get around the entire loop we have to have the same signal we started with.
We are going to make the same assumptions we made for the system we examined
earlier - the ideal relay system. Those assumptions are:
The output is periodic, and thus can be represented with a Fourier Series.
G(s) is a low pass system and filters out any harmonics, so that the output of G(s)
is only the fundamental in the Fourier Series.
We can examine the implications of all this. In effect, we are saying that the loop gain has
to be exactly one, at least for the fundamental. Let's look at the result we had earlier, but
cast things in the form of a gain for the fundamental component of the output signal.
The term on the right - the "equivalent gain" is the describing function. It is a function of
the input amplitude, A, and we will represent it as DF(A). It's not really a gain because it is
not constant. It depends on the input amplitude, A. Here is a plot of the describing
function plotted against A, the input amplitude to the nonlinearity.

2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 15/21
Note the following about this function.
For small amplitude inputs the gain is one.
A gain of 1.0 is what you expect since the system is operating linearly and the
gain is one in the linear region.
For amplitudes larger than the saturation level the "gain" decreases.
A decrease in gain should be expected because the amplitude of the output (at the
fundamental frequency) continues to increase, but reaches a limit. (In the limit,
as the input amplitude gets larger and larger, the output will look like the output
of an ideal relay. However, while the output amplitude does not increase, the
input increases and the ratio of output - at the fundamental - to the input goes
down - just like the graph shows.
However, that might be good because there might be an amplitude for which the loop gain is
one. First, rewrite the describing function as below.
Let's go back to the block diagram of the system. That's shown again below.
Now, treat the nonlinearity as a "variable gain" using the Describing Function. That means
that we will focus on the equivalent block diagram below.

2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 16/21
Then, taking into account the gain of the describing function, the gain of G(jw) and the
change in sign in the comparator/subtractor in the loop, we have to have the following for
sustained oscillations.
DF(A)G(jw) = -1
or
G(jw) = -1/DF(A)
Example
Let's see how this can be applied. Let's look at a particular system. It is similar to
what we have been considering, but it has a gain of 50 in front of the saturation. That will
simulate an amplifier that saturates at -10.5 and +10.5v. Here is the system.
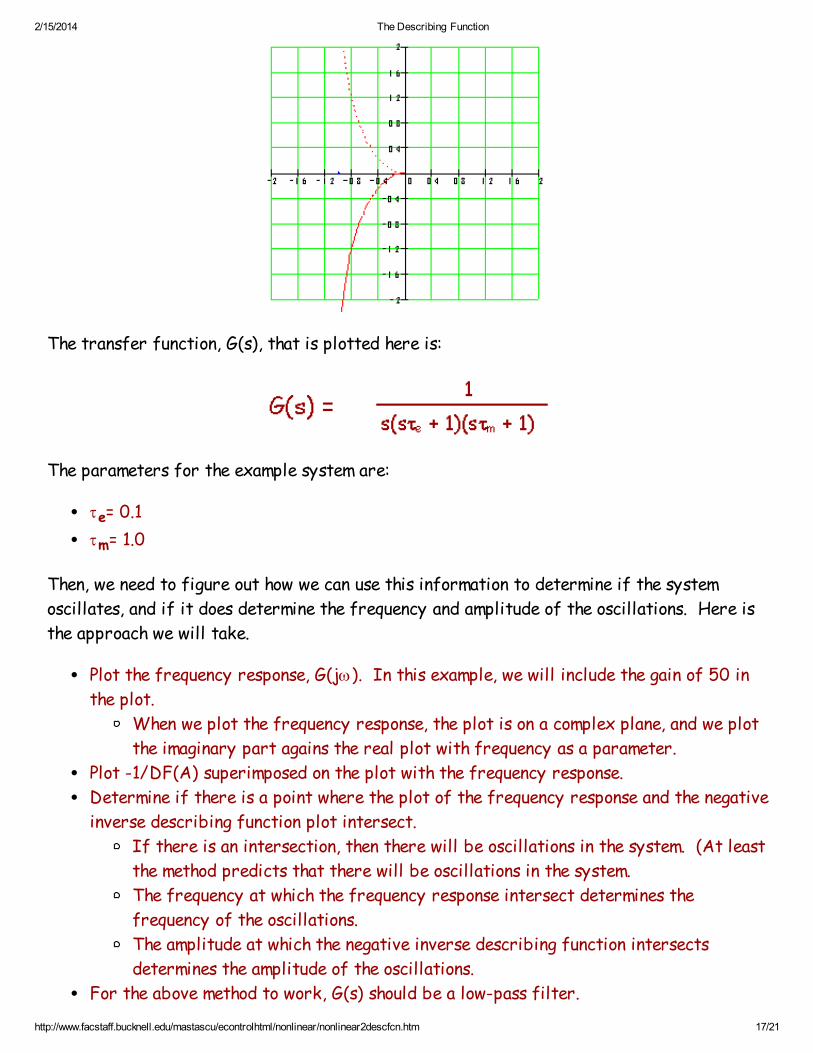
First, we need to consider how we can plot G(jw). The plot of choice is the Nyquist plot -
not a Bode' plot, not a Nichols Chart, whatever. The Nyquist plot for the transfer function
we are using as an example is shown below. This plot does not contain the gain of 50 in the
amplifier.
2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 17/21
The transfer function, G(s), that is plotted here is:
The parameters for the example system are:
te= 0.1
tm= 1.0
Then, we need to figure out how we can use this information to determine if the system
oscillates, and if it does determine the frequency and amplitude of the oscillations. Here is
the approach we will take.
Plot the frequency response, G(jw). In this example, we will include the gain of 50 in
the plot.
When we plot the frequency response, the plot is on a complex plane, and we plot
the imaginary part agains the real plot with frequency as a parameter.
Plot -1/DF(A) superimposed on the plot with the frequency response.
Determine if there is a point where the plot of the frequency response and the negative
inverse describing function plot intersect.
If there is an intersection, then there will be oscillations in the system. (At least
the method predicts that there will be oscillations in the system.
The frequency at which the frequency response intersect determines the
frequency of the oscillations.
The amplitude at which the negative inverse describing function intersects
determines the amplitude of the oscillations.
For the above method to work, G(s) should be a low-pass filter.

2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 18/21
Now, let's work through the steps outlined above. Here is a plot of the frequency response
and the negative inverse describing function shown together. The frequenc response is shown
in red and the negative inverse describing function is shown in blue. Adding a gain of 50 to
G(s) expands the frequency response plot, and the low frequency portion goes off scale. The
negative inverse descsribing function has a dot at -1 to show the value of the describing
function for a range of amplitudes up to the saturation value.
The frequency response intersects the negative inverse describing function at around -4.8.
At that point we can do the following computations.
The system should oscillate.
The frequency of oscillation - as determined from the frequency response - is 0.5 Hz.
Here we note that we computed the frequency at which G(jw) has a phase shift of
-180o above, and found that frequency to be 0.5 Hz.
The amplitude is found by determining when the describing function has a value of
1/4.8. That's about about .208. To determine that, we need to examine the plot of the
describing function.

2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 19/21
Estimating the point at which DF(A) = 0.21, that looks to be around A = 60. That gives
us the input to the saturation element. That's the output of an amplifier with a gain of
50, so the input to the amplifier is 1.2, and that also has to be the magnitude of the
output. We aren't concerned about the sign here, only the magnitude of the
oscillations.
Summarizing our predictions, we have:
The system oscillates.
The frequency of oscillation is 0.5 Hz.
The amplitude of the oscillations at the system output is 1.2.
We can check these predictions by doing a simulation in Simulink. Here is the system we will
use.
Compare this simulation with the block diagram of the system just for reference.
Then, examine the computed response of the system. That is shown below.

2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 20/21
We can compare the computed response with our predictions. Here is the comparison
The system oscillates. That's what we predicted.
The predicted frequency of oscillation is 0.5 Hz.
Measuring the frequency, we count 10 periods in 20 seconds, for a frequency of
0.5 Hz. That's what we predicted.
Notice that we examine the portion where we seem to be getting sustained
oscillations.
The predicted amplitude of the oscillations at the system output is 1.2.
The oscillations seem to have an amplitude of 1.25 or a little more compared to
the 1.2 that was predicted. That's close but not right on. We'll accept that.
Summary
We can summarize what has been presented in this lesson.
Nonlinear systems can exhibit sustained oscillations at a particular amplitude and
frequency.
A Describing Function is a kind of nonlinear gain that determines the ratio of the
fundamental of a periodic output of a nonlinearity when the nonlinearity is excited by
a sinusoidal input.
Using the describing function and the frequency response of the linear portion of the
system - which must have a low-pass transfer function it is possible to determine the
following:
Whether oscillations occur, and if they do occur to find:
Amplitude of the oscillations
Frequency of the oscillations
To determine the above, plot the frequency response of the linear portion of the
system using a Nyquist plot, and on the same plot superpose a plot of the negative
inverse of the describing function. The intersection will permit determination of
amplitude and frequency of the oscillations.
What if?
There are several points that should be noted.
The linear portion of the system is assumed to be a low-pass. That filters out any
harmonics in the periodic signal, and makes the assumption of a sinusoidal input to the
nonlinearity realistic. That's what allows you to use a describing function.
The nonlinearities we have examined here are "memoryless". In other words, the
output depends only upon the present value of the input. Nonlinearities that have
2/15/2014 The Describing Function
http://www.facstaff.bucknell.edu/mastascu/econtrolhtml/nonlinear/nonlinear2descfcn.htm 21/21
hysterisis may not depend only upon the present outut, and in those cases, the
describing function might be complex to account for phase shift in the fundamental.
These considerations may mean that you have to modify your analysis. In those cases
you may or may note have the comfort of a describing function analysis, and you may have to
rely upon doing simulations (using Simulink, for example) to compute response for various
sets of circumstances.
Problems
Problem Nonlinear1P01
Send us your comments on these lessons.