the power of feedback - abo.fihtoivone/courses/isy/poweroffeedback.pdf · direction for steering a...
TRANSCRIPT

THE POWER OF FEEDBACK

FEEDBACK CONTROL
Let’s return to the problem of controlling the output y(t)
of a dynamical system in spite of disturbances d(t) using
the control signal u(t)
--
?
S yu
d
Assume that the system is described by
dy(t)
dt+ ay(t) = bu(t) + cd(t)
Our goal is keep the controlled output y(t) close to a
desired value r,
y(t) ≈ r
despite the effect of the disturbance d(t)
r: setpoint for y(t) (s. borvarde, fi. asetusarvo)
2

At first sight, using a purely static analysis and ignoring
the dynamic system behavior by setting dy(t)/dt = 0, it
would seem to make sense to cancel the effect of d(t) and
setting y(t) = r by selecting u(t) so that
ar = bu(t) + cd(t)
or
u(t) = −a
b[ar − cd(t)]
Then the transient, dynamic, behavior of the system is
then described by
dy(t)
dt+ ay(t) = ar
Comments:
• Method requires that the disturbance d(t) is known
(wind, friction, etc). This is impossible in practice!
• Method requires that system model is known, as can-
celing the effect of disturbance requires knowledge of
parameters a, b, c (which depend on mass of car, air
drag coefficient etc.). In practice knowledge of system
parameters is always more or less inexact.
• The dynamic response determined by parameter a
has not been affected. If a is small the response would
be very slow, and worse, if a < 0 the system would
even be unstable!
3

We need a better approach!
When manually driving a car, we use the current speed to
adjust the engine power, or the current course and road
direction for steering a car in the correct direction.
In other words:
We should use feedback from the signal we wish to
control!
4

Block diagram showing the connection between the vari-
ous signals and systems in feedback system:
?
d
Gcyuer Gp
6e+
−-- - -
Gp: system to be controlled
Gc: the controller
e(t) = r − y(t): control error
5

Let’s try to control the first-order system
dy(t)
dt+ ay(t) = bu(t) + cd(t)
using feedback from the measured output y(t).
Take the simple linear control law
u(t) = Kp [r − y(t)] (1)
where u(t) is proportional to the control error e(t) =
r − y(t).
Then the controlled system is described by
dy(t)
dt+ (a + bKp) y(t) = bKpr + cd(t)
Observations:
• For a constant disturbance d(t) = d0, we have
y(t) → bKp
a + bKpr +
c
a + bKpd as t → ∞
Hence for a sufficiently large Kp such that Kpb > 0
we havebKp
a + bKp≈ 1,
c
a + bKp≈ 0
and hence we have approximately y(t) → r.
• The transient response is determined by
a + bKp
and can be made faster by selecting a large Kp.
6
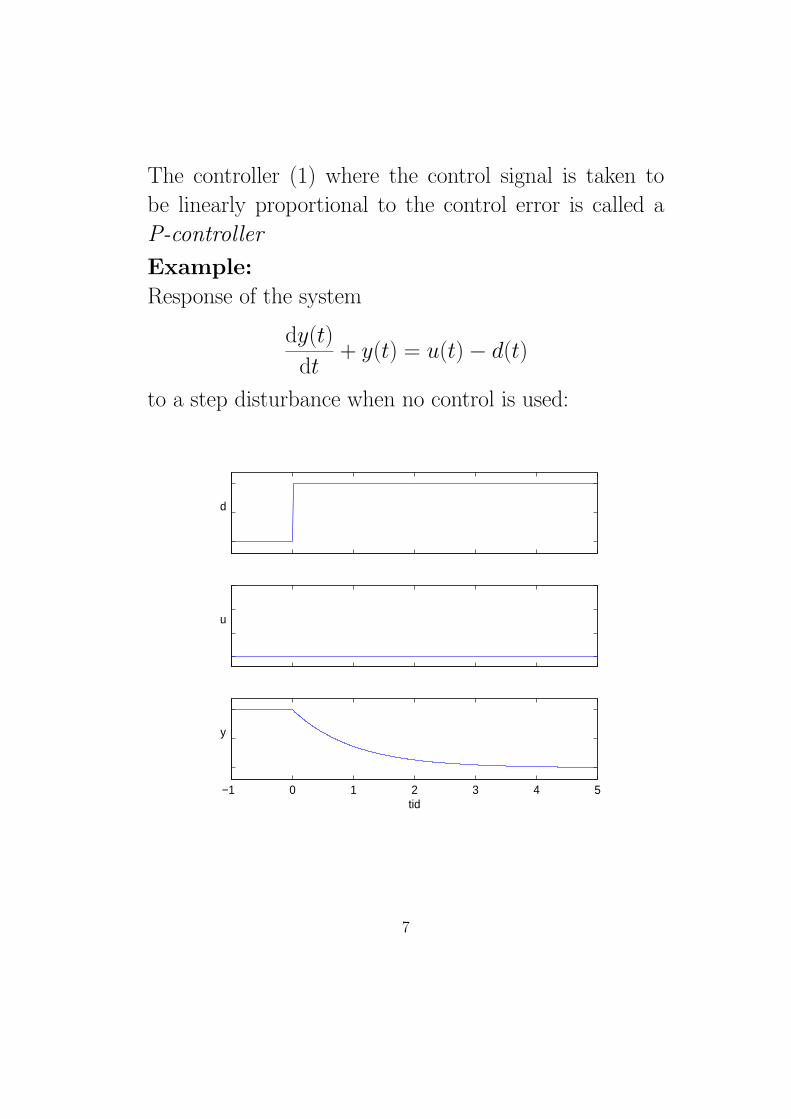
The controller (1) where the control signal is taken to
be linearly proportional to the control error is called a
P-controller
Example:
Response of the system
dy(t)
dt+ y(t) = u(t)− d(t)
to a step disturbance when no control is used:
d
u
−1 0 1 2 3 4 5
y
tid
7

Response when using the control law
u(t) = Kp (r − y(t)) , Kp = 2
d
u
−1 0 1 2 3 4 5
y
tid
8

We see that by using feedback the effect of the disturban-
ce can been reduced:
- without the need to know the disturbance
- without knowing exact values of the system parameters
Limitations of P-controller:
- only one design parameter, Kp by which the response
can be affected
- complete cancellation of constant step disturbance requires
infinite gain Kp
These limitations can be overcome by using a controller
which integrates the control error. This gives the
I-controller:
u(t) = Ki
∫ t
τ=0(r − y(τ )) dτ
Idea:
As long as y(t) < r, the integral grows, and hence u(t)
is increased/decreased until y(t) = r, and vice versa,
as long as y(t) > r, the integral reduces, and hence u(t)
is decreased/increased until y(t) = r.
9

Example:
Using the I-controller for previous example
(Ki = 5)
d
u
−1 0 1 2 3 4 5
y
tid
The I-controller cancels the effect of an unknown constant
step disturbance by an adaptation mechanism (u(t) is
adjusted as long as y(t) = r)
10

Limitations of I-controller:
- the controller still has only one design parameter, Ki,
by which the response can be affected
- response may be sluggish, as it takes some time for the
integral to grow or decrease
- the slow change of the integral may lead to oscillatory
response (cf. figure)
These limitations can be overcome by combining the P-
and I-controllers. This gives the
PI-controller:
u(t) = Kp [r − y(t)] +Ki
∫ t
τ=0(r − y(τ )) dτ
Idea:
The proportional (P) component gives a fast response
when y(t) = r, and the integrating (I) component cancels
the effect of unknown step disturbances
11

Example:
Using the PI-controller for previous example
(Kp = 2, Ki = 5)
d
u
−1 0 1 2 3 4 5
y
tid
The PI-controller gives a faster response than the I-controller
without oscillations, and cancels effect of constant distur-
bance
12

Limitations of PI-controller:
- the controller still has only two design parameters, Kp
and Ki, by which the response can be affected. Alt-
hough better than only one parameter, this still limits
how the response can be affected
- the controller reacts only when y(t) = r, i.e., after there
is a control error
The response can be made still faster by introducing a
derivative (D) component. This gives the
PID-controller:
u(t) = Kp [r−y(t)]+Ki
∫ t
τ=0(r − y(τ )) dτ+Kd
d(r − y(t))
dt
Idea:
The derivative (D) component reacts already to the rate
of change in the control error even before any error exists,
resulting in a faster response
13

Example:
Using the PID-controller for previous example
(Kp = 2, Ki = 5, Kd = 0.5)
d
u
−1 0 1 2 3 4 5
y
tid
Controller reacts instantaneously when dy(t)/dt = 0,
resulting in faster response.
14

Limitation of PID-controller:
- Derivation is sensitive to noise, and in practice it can
therefore not be applied in pure form
- Derivative action in a controller would lead to sudden
step changes in control signal (cf. above figure), which
would result in excessive wear of equipment
Remedy:
Instead of taking the time derivative of the output y(t)
directly, we filter it first. A common method is to modify
the PID-controller as follows:
u(t) = Kp [r − y(t)] +Ki
∫ t
τ=0(r − y(τ )) dτ +Kd
dx(t)
dt
where x(t) is obtained by filtering the control error ac-
cording to
dx(t)
dt+ aix(t) = bi (r − y(t))
15
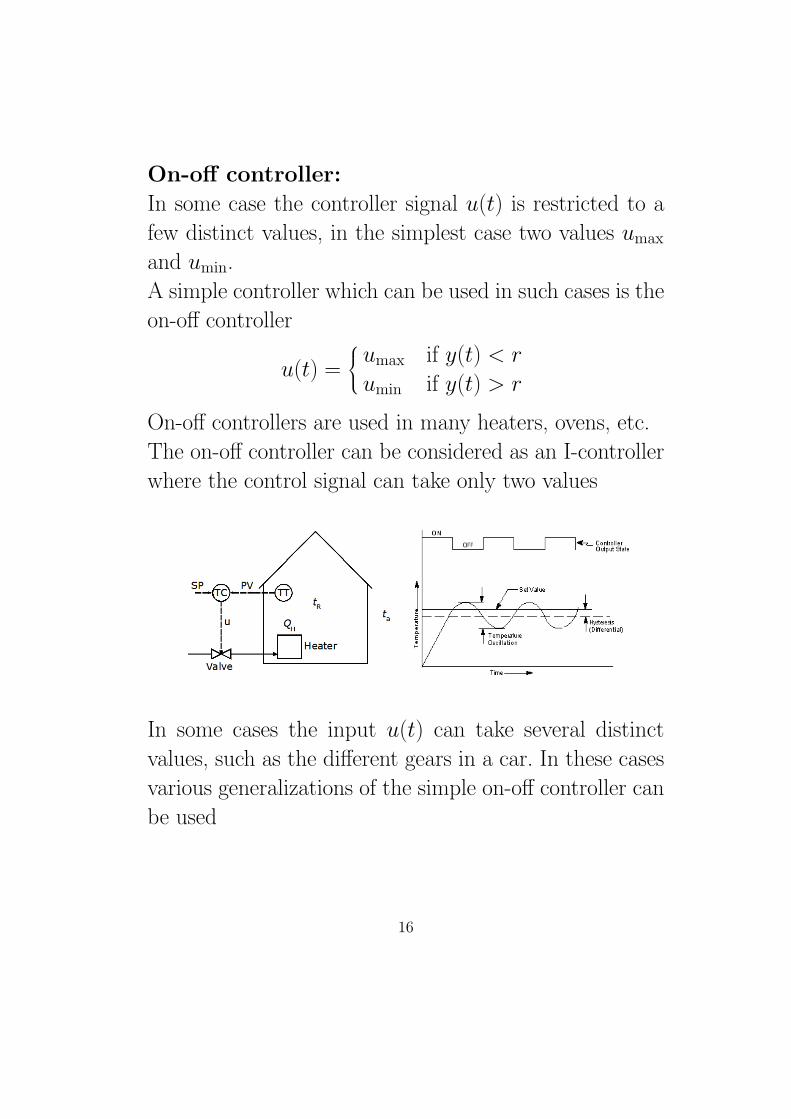
On-off controller:
In some case the controller signal u(t) is restricted to a
few distinct values, in the simplest case two values umax
and umin.
A simple controller which can be used in such cases is the
on-off controller
u(t) =
umax if y(t) < r
umin if y(t) > r
On-off controllers are used in many heaters, ovens, etc.
The on-off controller can be considered as an I-controller
where the control signal can take only two values
In some cases the input u(t) can take several distinct
values, such as the different gears in a car. In these cases
various generalizations of the simple on-off controller can
be used
16

In spite of their simplicity, the P-, PI- and PID-controllers
are quite powerful, and for systems with a not-too-complex
dynamics they are the most commonly used controller
structures used in practice.
For practical work, a number of tuning rules to select
the controller parameters Kp, Ki and Kd have been de-
veloped. Of course, in order to tune a controller some
knowledge of the system dynamics must be available.
These simple controllers are, however, not sufficient for
systems with
• complex dynamic behaviour,
• most unstable systems,
• systems with many outputs to be controlled, and ma-
ny control inputs
There is a vast, and in many cases quite advanced, theory
of how to design controllers for all kinds of dynamical
systems.
17

Feedforward
In spite of the power of pure feedback from measured
system outputs, it still makes sense to use measurements
of disturbances as well when these are available. This is
called feedforward (s. framkoppling, fi. myotakytkenta)
control
?
d
Gcyuer Gp
Gf�
?e6e+
−-- -- -
18

Example:
in controlling the temperature in a building, the indo-
or temperature (controlled signal) is used for feedback,
whereas the outdoor temperature (disturbance) is used
for feedforward
We have the following control methods:
• In open-loop control, no measurement are used to
determine the control signal P .
• In pure feedback control, the control signal P is a
function of the controlled signal T only.
• In pure feedforward control, the control signal P is
a function of the disturbance signal Ty only.
• In combined feedback and feedforward control, the
control signal P is a function of both the controlled
signal T and the disturbance signal Ty.
19

Uses of feedback control
Feedback control can be applied in several ways:
• Servo control.
To control a system in such a way that y(t) follows
a given trajectory r(t) despite (unknown) disturban-
ces and (often) incomplete knowledge of the system
dynamics.
Examples: driving a car along a road, controlling mo-
vement of robot arm from one position to another.
20

• Regulator problem.
To control a system in such a way that y(t) is as close
to the setpoint r as possible despite disturbances.
The simulation examples above have all been regu-
lator problems, where the disturbance has been an
step disturbance.
Often the disturbance has the character of random
noise. Then the control objective is to minimize the
variance of the control error, E[(y(t)− r)2
].
This problem is important in statistical process con-
trol, where the objective is to make a high-quality
product, such as paper with constant thickness and
other properties.
21

Example of reducing the output variance.
0 100 200 300 400 500 600 700 800 900 1000−20
−15
−10
−5
0
5
10
y(t)
Without control
0 100 200 300 400 500 600 700 800 900 1000−20
−15
−10
−5
0
5
10
Time
y(t)
Minimum variance control
Above: without control
Below: using a controller which minimizes the output va-
riance
22

• Stabilization problem.
Feedback may be applied simply to stabilize an ot-
herwise unstable system, such as an exothermic che-
mical reactor, an airplane, a helicopter, an inverted
pendulum, or an unstable vehicle.
23

• To change system dynamics.
Feedback can be used to change the dynamical pro-
perties of a system, for example to make it easier
maneuverable for a human. For example,
- modern supersonic airplanes react rapidly and have
dynamic properties which make them difficult or
impossible to control manually. By changing the
dynamics with feedback control manual control
is possible.
- in precision instruments, such as electron microsco-
pes, telescopes, or robotic surgery accurate po-
sition of the instrument is made by a feedback
controller, although the desired position is deter-
mined manually.
24

Observe that these cases can be considered as servo
problems, where the reference signal r(t) is determi-
ned manually.
25

SOME EARLY EXAMPLES OF FEEDBACK CONTROL
Before the use of electrical circuits, feedback control had
to be implemented by mechanical constructions.
Various mechanical designs based on feedback to control
liquid levels and flows have been used early on.
26

Mechanical methods for level control have been used from
ancient times.
And are useful even today:
The controlled variable (water level) is used to determine
the control variable (valve). This is an on-off feedback
controller, as the control variable can have only two states
(open-closed).
27

Watt’s centrifugal speed governor (1788) was used to con-
trol the speed of steam engines:
The controlled variable (rotation speed) is used to de-
termine the control variable (valve that determines the
steam flow.
28

As long as controllers had to be implemented by me-
chanical constructions, many processes were controlled
manually. The possibilities offered by electrical circuits
and, later, digital techniques, have made it possible to
solve and implement more demanding control problems
in practice.
29