thsis ins - the hydrographic society uk · pdf filethsis ins a review of the ... ins inertial...
TRANSCRIPT

www.fugro.com
THSiS INS
A review of the application of INS within Fugro

www.fugro.com
THSiS INS
Outline
History – quick review of INS
Fugro Uses – Where and how we use INS
Fugro Developments – Off the shelf v In house developments

www.fugro.com
History
INS has been around for a while….
Western Geophysical W-INS, late 1970’s (We invariably needed SHORAN)Shelltech/Itech land seismic use of INS for control (helicopter based Zupt’s) Mid/late 1970’sExxon/Honeywell’s DP reference systems – Riser and INS –1979British Oceanics/Intersub INS for manned submersible construction positioning (“used in place of unreliable acoustic systems”) – early 1980’s

www.fugro.com
What is it
IMU block diagram
www.fugro.com
What is it
Inertial Measurement Unit (IMU)What is it ?3 sensors measuring rotation around X, Y & Z axis3 accelerometers measuring acceleration along the X, Y and Z axisTime
Software takes raw rate and raw acceleration into a moreuseful product.AHRS Attitude Heading Reference SystemINS Inertial Navigation System

www.fugro.com
What is it
Conceptually an INS uses dead reckoning navigation
It adds results from current epoch to the sum of the previous
With no aiding there will be a growth in error
10 minutes 15 minutes
5 metres
20 metres

www.fugro.com
What is it
Many Aiding Observations can be usedDGPSDoppler Velocity (Acoustic and Radar)AltimetersDepth sensorsRange/Range
But why use a positioning system to aid ?
If I know where I am why do I need to be told ?
www.fugro.com
What is it
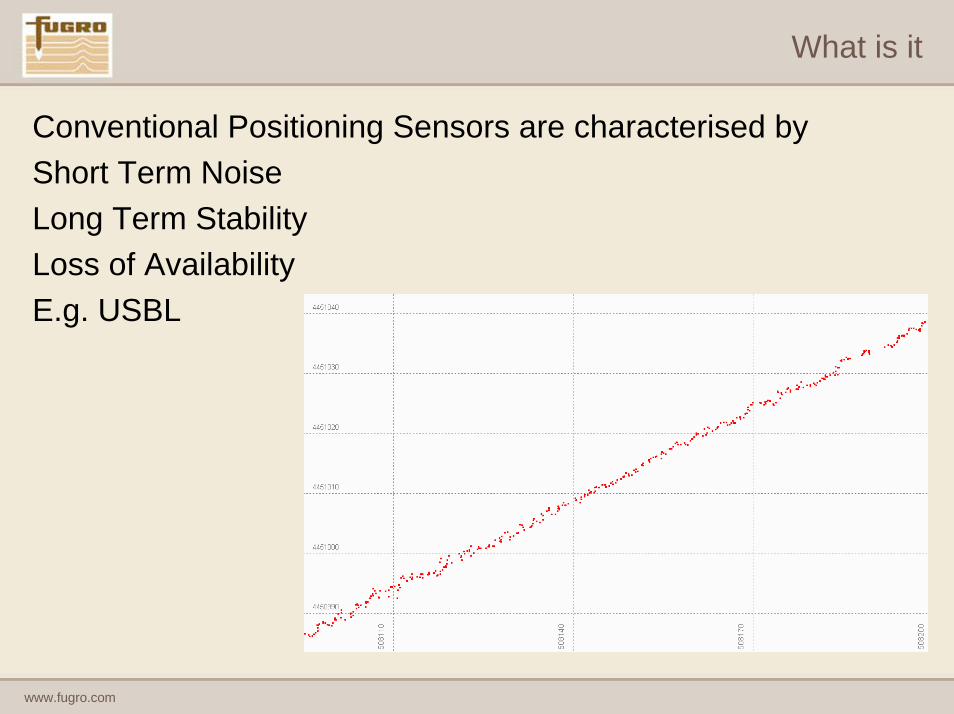
Conventional Positioning Sensors are characterised by Short Term NoiseLong Term StabilityLoss of AvailabilityE.g. USBL

www.fugro.com
What is it
Integrate INS with aiding or positioning system to –
Remove Short Term NoisePreserve Long Term StabilityImprove Availability
ScenariosDeep water untethered and or unmanned vehiclesAirborneReduced availability of positioning –
Environmental Effects

www.fugro.com
Fugro Uses
AUV and UUV positioning
HP DGPS /HiPAPLinkQuest Acoustic ModemIXSEA IMU 90RDI DVLDigiquartz DepthTritech Altimeter
www.fugro.com
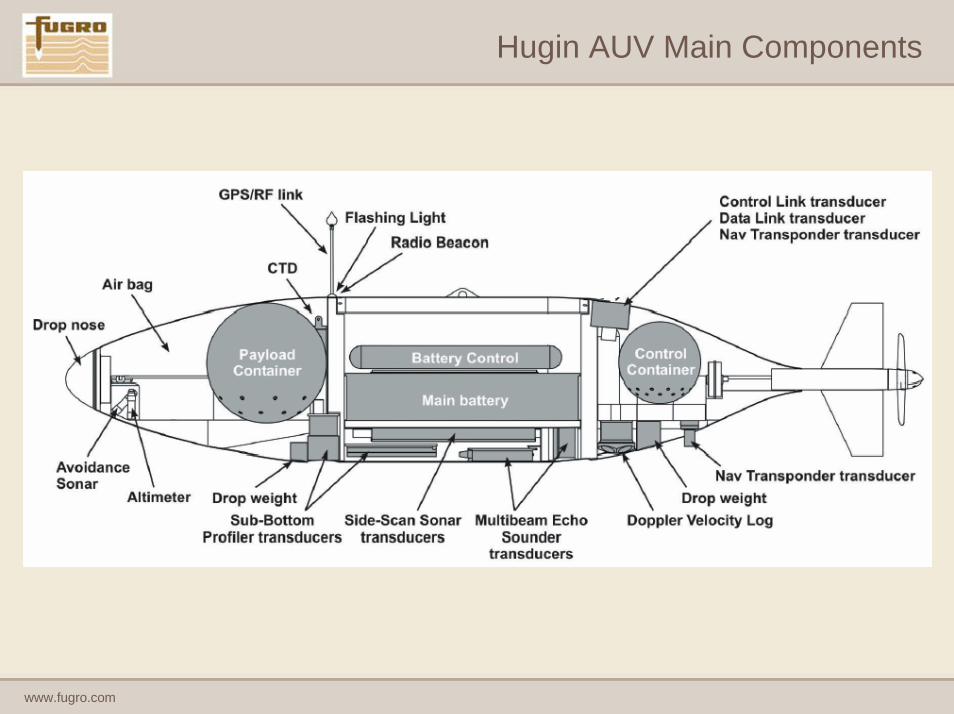
Hugin AUV Main Components

www.fugro.com
Recent AUV Positioning Verification
• Water Depth 1300m• Box in around as-supplied wellhead
position • 4 Lines – 4 Picks - mid swathe of
EM2000
Multibeam Survey
Easting Northing
M1_01 (090°) 619641.5 9376430.8
M1_04 (180°) 619639.1 9376431.0
M1_02 (270°) 619640.0 9376432.4
M1_03 (000°) 619641.8 9376432.0
Average 619640.6 9376431.6
Median 619640.8 9376431.5
ΔE/ΔN from as-supplied 0.1 -0.2
Absolute separation 0.2
SD 1.3 0.8

www.fugro.com

www.fugro.com
Fugro Uses
Deep Water ROV Positioning

www.fugro.com
Fugro Uses
• Sensors– Motion sensor, DVL– Position aiding: HP GPS HiPAP USBL– Finetrack L200 Post Processed
Pipe in trench
6m x 3m Matt
Pipeline Support

www.fugro.com
Fugro Uses
Surface Navigation Under Cover

www.fugro.com
Fugro Uses
• Sensors– Motion sensor, DVL– Position aiding: RTK
GPS (dual system)• Environment
– Signal masking, outliers in GPS positions
– GPS MOVIE
– INS MOVIE
Bad GPS position
www.fugro.com
Fugro Uses
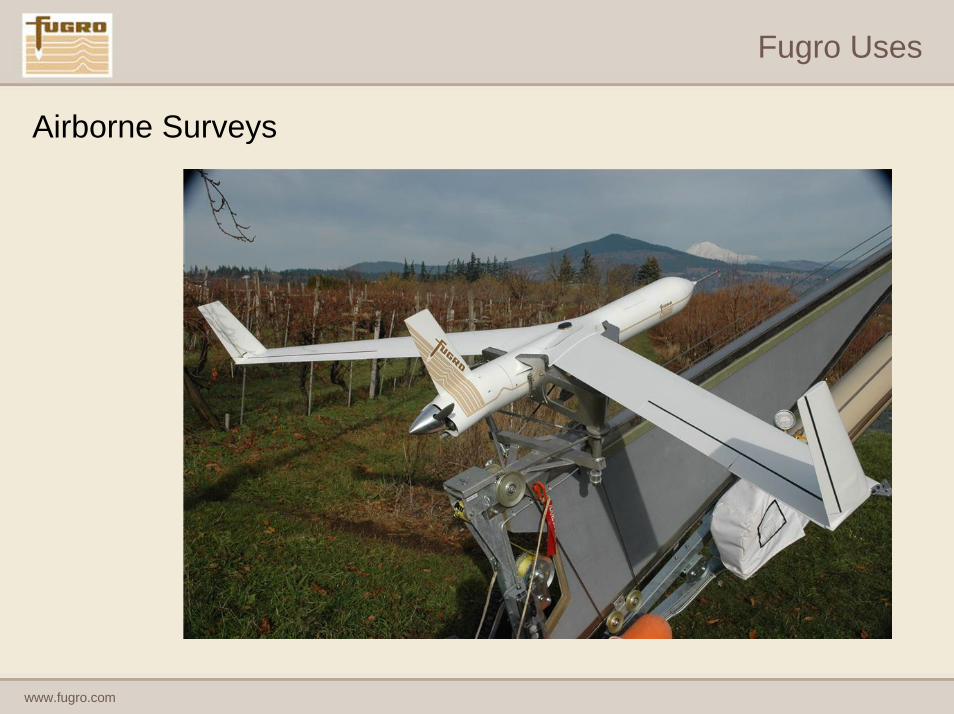
Airborne Surveys

www.fugro.com
Fugro Uses
Reduced Navigation

www.fugro.com
To Develop ?
Various INS/IMU units on the market
Numerous aiding positioning systems
Some integrated systems available but manufacturer specific
HAIN good example
Fugro along with other contractors use this in Hugin 3000 AUV
Mother ship must have HiPAP
www.fugro.com
Finetrack
• Fugro developed family of filters for different hardware combinations
• Hardware Independent• Developed in house and in conjunction with other partners• FINETRACK

www.fugro.com
Finetrack
L series Loosely CoupledAid System Position/VelocityINS Position/Velocity Enter into Kalman
T series Tightly CoupledAid System raw observationsINS rate & accelerationsEnter into Kalman
www.fugro.com
Finetrack
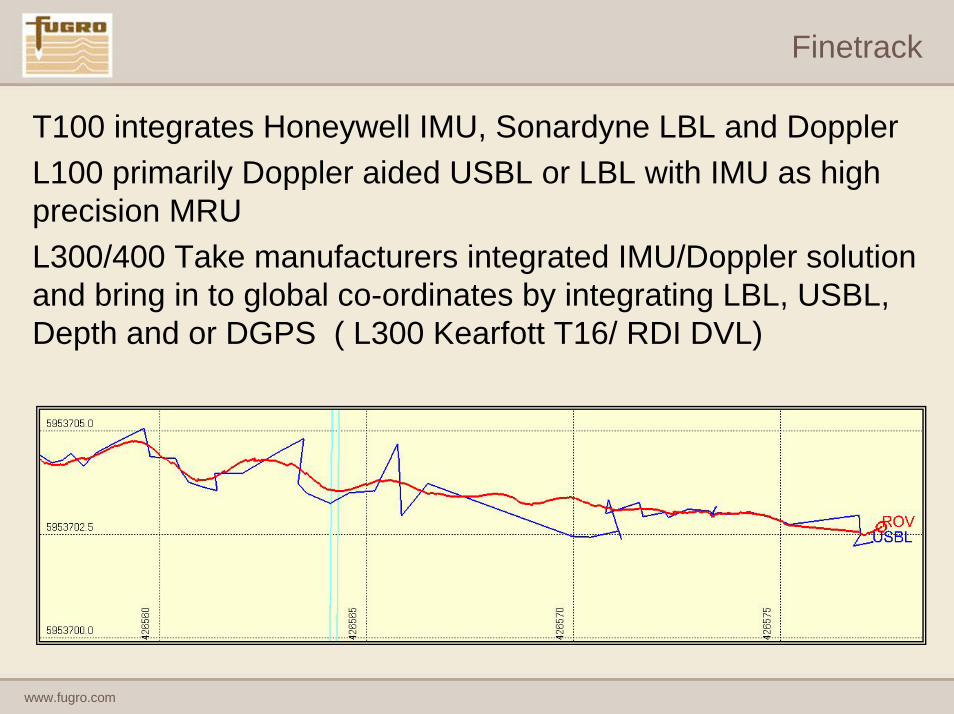
T100 integrates Honeywell IMU, Sonardyne LBL and DopplerL100 primarily Doppler aided USBL or LBL with IMU as high precision MRUL300/400 Take manufacturers integrated IMU/Doppler solution and bring in to global co-ordinates by integrating LBL, USBL, Depth and or DGPS ( L300 Kearfott T16/ RDI DVL)

www.fugro.com
Where Next ?
MEMS (micro-electro-mechanical systems )

www.fugro.com
Summary
INS after a long gestation is here to stay
Can be used in numerous applications
Off the Shelf availability, if tie to one manufacturer is OK
INS in Action