tire sensors for the measurement of slip angle and …gurkan/sae 2011 presentation_2011-01...tire...
TRANSCRIPT
Tire Sensors for the Measurement of Slip Angle and FrictionCoefficient and Their Use in Stability Control Systems
Gurkan Erdogan, Sanghyun Hong, Francesco Borrelli, Karl Hedrick
Department of Mechanical EngineeringDepartment of Mechanical Engineering
University of California at Berkeley

Content � Objective
� Motivation� Integration of Tire Sensors and Vehicle Control Systems
� Background
� Estimation Algorithms
� Slip Angle
� Tire-Road Friction Coefficient
2
� Tire-Road Friction Coefficient
� Accelerometer Based Tire Sensor� Lateral Acceleration
� FAE Simulations
� Surface Transition Tests
2011-01-0095
Objective
� Understanding Tire Deformations
� Deflection Profiles
� Acceleration Profiles
� Developing Estimation Algorithms
� Slip Variables
� Friction Coefficient
3
� Tire Forces
� Integration of Tire Sensors and Vehicle Control Systems
� Stability Control Systems
� Traction Control Systems
2011-01-0095

� Estimation of slip angle, slip ratio, tire forces and tire road friction coefficient may
lead to significant improvements in vehicle control systems.
� Slip angle is directly related to skidding,
� Slip ratio is directly related to loss of traction
� Vertical forces are directly related to rollover
� Friction coefficient provides a good measure of the available tire forces.
Motivation
4
2011-01-0095

MotivationIntegration of Tire Sensors and Vehicle Control Systems
Benefit of Friction Estimation
� A stability control system enhanced with tire sensors can …
� Generate slip angle and yaw rate references based on the friction information coming from the roadway.
� Follow the references smoothly.
EXAMPLE SCENARIO :
Default value of the friction
5
Default value of the friction coefficient inside the controller is set to a high friction value, however the driver is executing a double lane change maneuver on a slippery road surface with a low friction coefficient.
2011-01-0095

MotivationIntegration of Tire Sensors and Vehicle Control Systems
Benefit of Slip Angle Estimation
� Uncertainties of each sensor and observer used in the estimation of tire slip angles reduce the accuracy and reliability of slip angle estimations.
+−= −
x
fy
ffv
Lv ψδα
&1tan
6
� Estimation of the tire slip angles directly from the tire sensor measurements can improve the accuracy and reliability.
xv
2011-01-0095

Tire Deformations
7
� Sidewall Deformations� Radial
� Lateral
� Tangential
� Tread Deformations� Radial
� Lateral
� Tangential
2011-01-0095

Background
8
� G. Erdogan, L. Alexander, R. Rajamani, “Estimation of Tire-Road Friction Coefficient Using a Novel Wireless Piezoelectric Tire Sensor,” IEEE Sensors, Volume 11, No. 2, pp. 267-279, February 2011.
� G. Erdogan, L. Alexander, R. Rajamani, “Measurement of Uncoupled Lateral Carcass Deflections with a Wireless Piezoelectric Sensor and Estimation of Tire Road Friction Coefficient”, Proceedings of the ASME Dynamic Systems and Control Conference, Cambridge, MA, September 2010
� G. Erdogan, L. Alexander, R. Rajamani, “A Novel Wireless Piezoelectric Tire Sensor for the Estimation of Slip Angle”, Measurement Science and Technology, Volume 21, No. 1, pp. 015201 , January 2010
2011-01-0095

qqcp
qcp
×++=
+=
ω&&&
Estimation Algorithms – Slip Angle
9
α−=∂∂
=∂∂
x
v
x
u0
cgy
cgx
Vs
v
x
vxV
Vs
u
x
uyV
∂∂
+∂∂
−−−=
∂∂
+∂∂
−=
ϕα
ϕ • Full Adhesion
• No Turn Slip
• Steady State
• Small Slip Angle
At the beginning of the contact patch, the slope of the deflection curve can be used to determine the slip angle.
2011-01-0095
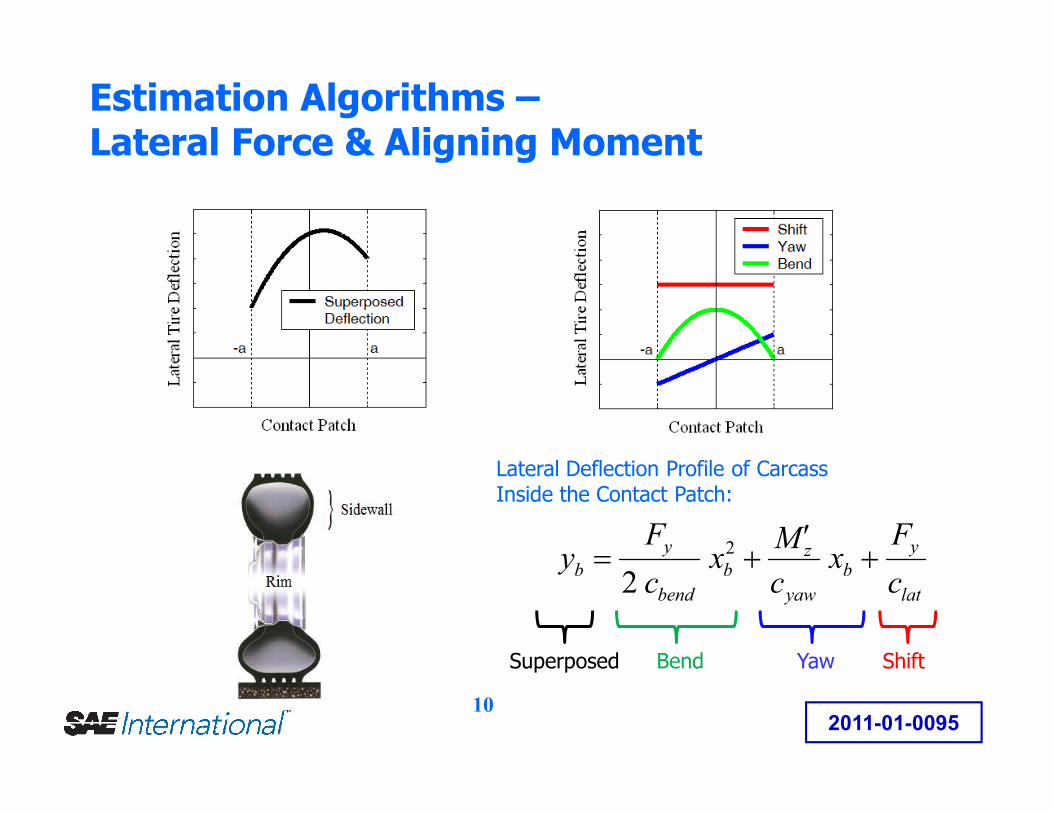
Estimation Algorithms –Lateral Force & Aligning Moment
10
Lateral Deflection Profile of Carcass Inside the Contact Patch:
lat
y
b
yaw
zb
bend
y
bc
Fx
c
Mx
c
Fy +
′+= 2
2
Bend Yaw ShiftSuperposed
2011-01-0095

Brush Model
Estimation Algorithms – Friction Coefficient
11
( )( )
( )( )
( )( )
+−=
slslsl
zy FFαα
αα
αα
µ2
2
tan
tan
3
1
tan
tan1
tan
tan3
( )slz
py
F
acαµ tan
3
2 2
=
Lateral Tire Force :
Friction Coefficient :
( )( )
( )( )
( )( )
( )( )
}|tan
tan|)
tan
tan(3|
tan
tan|31{
tan
tan 32'
slslslsl
zz aFMαα
αα
αα
αα
µ −+−−=Aligning Moment :
2011-01-0095
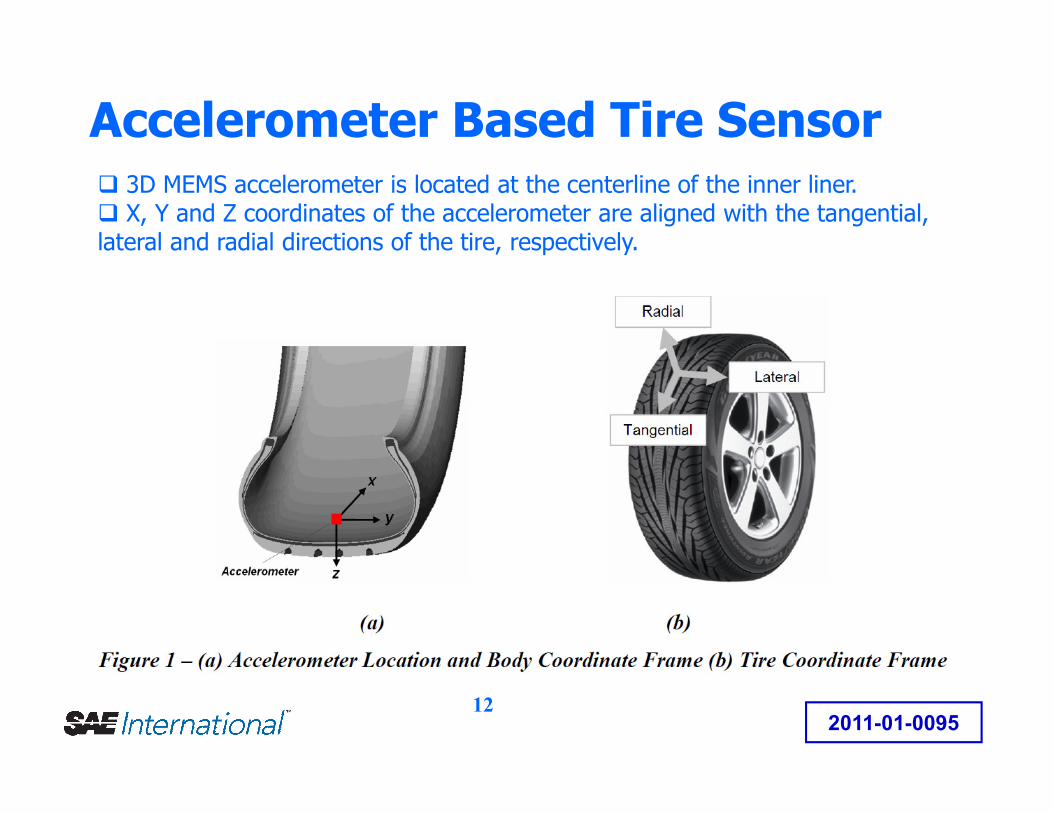
Accelerometer Based Tire Sensor� 3D MEMS accelerometer is located at the centerline of the inner liner.� X, Y and Z coordinates of the accelerometer are aligned with the tangential, lateral and radial directions of the tire, respectively.
12
2011-01-0095

Tire FEA Model
13
2011-01-0095
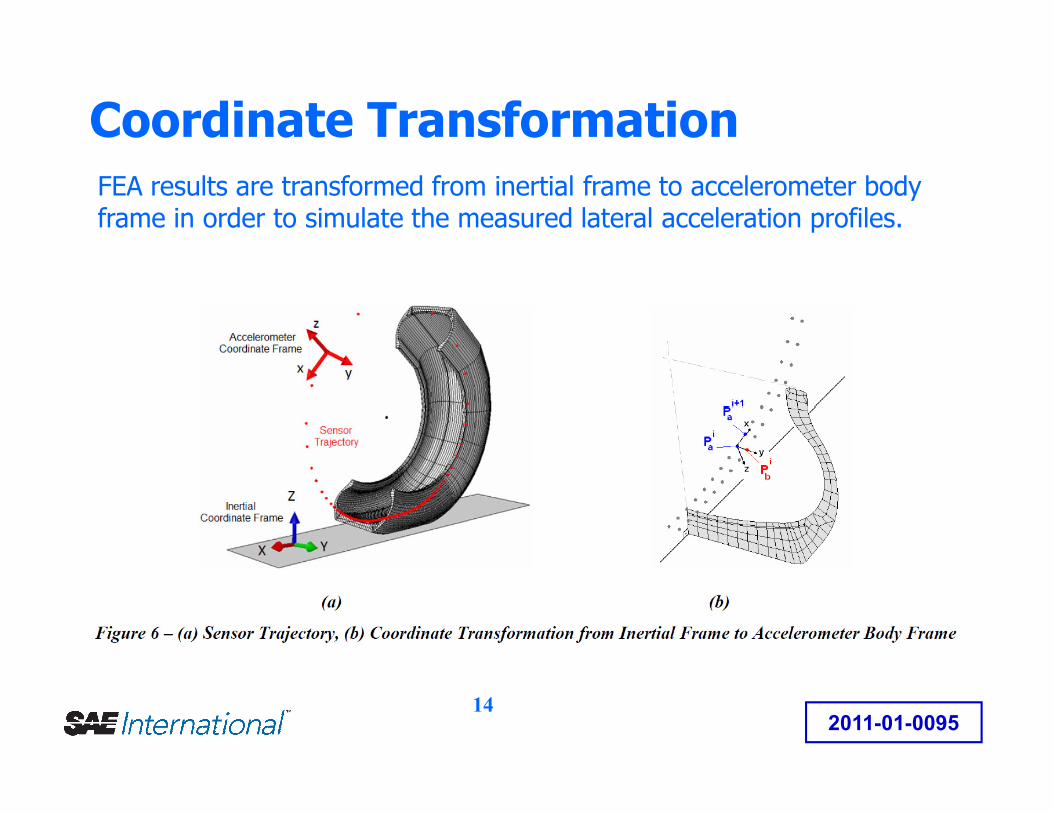
Coordinate Transformation
FEA results are transformed from inertial frame to accelerometer body frame in order to simulate the measured lateral acceleration profiles.
14
2011-01-0095

Experimental Verification
15
2011-01-0095

Slip Angle Estimations based on FAE Model
V = 40 km/hr
µµµµ = 0.9
16
2011-01-0095

Friction Estimations based on FAE Model
V = 40 km/hr
αααα = 2o
17
2011-01-0095

Recent Tests of Tire Sensors on a Vehicle
Lateral acceleration
profiles measured on a
18
2011-01-0095
profiles measured on a
vehicle at a slip angle
close to zero.
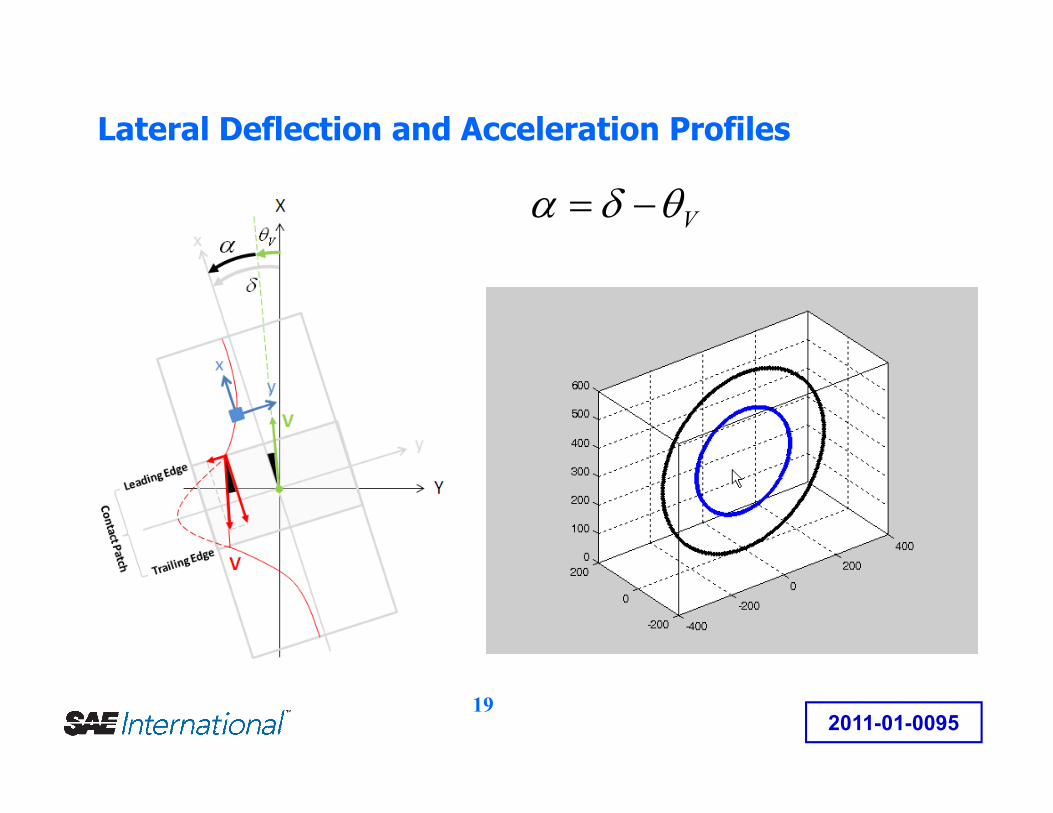
Lateral Deflection and Acceleration Profiles
Vθδα −=
19
2011-01-0095

Lateral Deflection and Acceleration Profiles
Vθδα −=
20
2011-01-0095

Lateral Deflection and Acceleration Profiles - All Four Tires
21
2011-01-0095
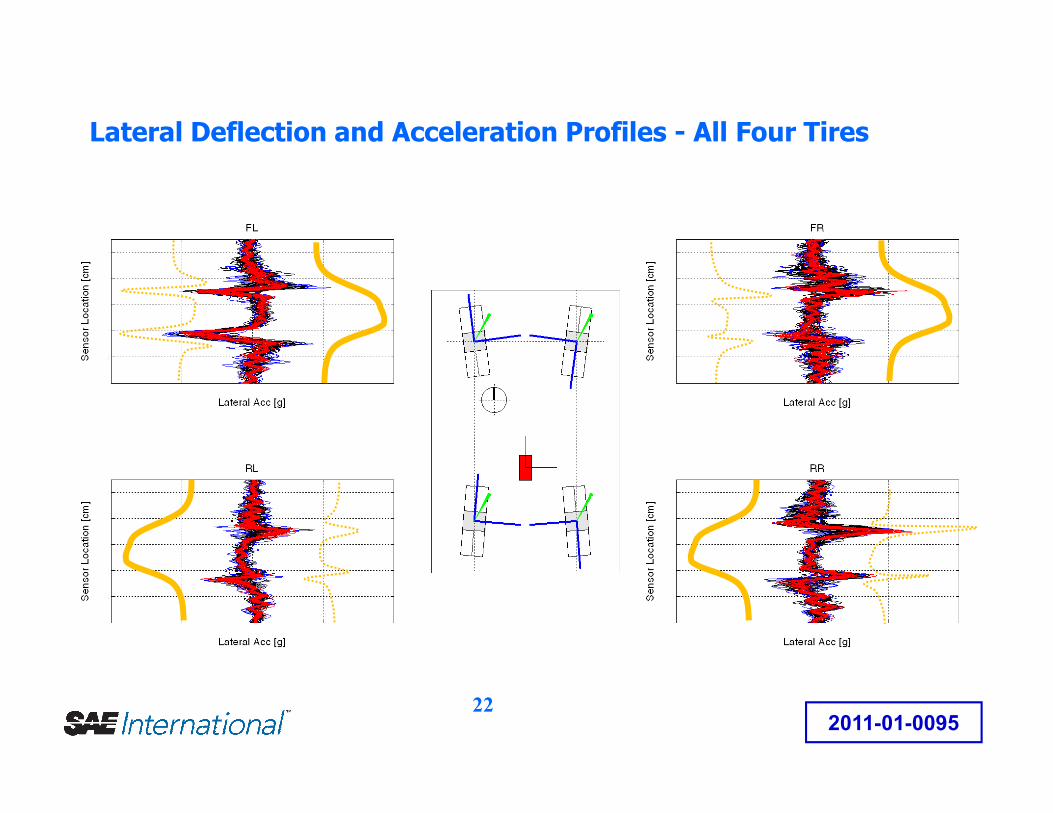
Lateral Deflection and Acceleration Profiles - All Four Tires
22
2011-01-0095

Acknowledgements
� Pirelli Tyre, SpA
� Giorgio Audisio
� Riccardo Tebano
� Roberto Villa
� Marco Sbrosi
Ford Research and Innovation Center
23
� Ford Research and Innovation Center
� Davor Hrovat
� Eric Tseng
� Michael Fodor
� Mitch McConnell
2011-01-0095

Thank you for listening …
24