torque ripple minimization of matrix converter-fed pmsm drives using advanced direct torque control
TRANSCRIPT
8/10/2019 TORQUE RIPPLE MINIMIZATION OF MATRIX CONVERTER-FED PMSM DRIVES USING ADVANCED DIRECT TORQUE CON…
http://slidepdf.com/reader/full/torque-ripple-minimization-of-matrix-converter-fed-pmsm-drives-using-advanced 1/18

8/10/2019 TORQUE RIPPLE MINIMIZATION OF MATRIX CONVERTER-FED PMSM DRIVES USING ADVANCED DIRECT TORQUE CON…
http://slidepdf.com/reader/full/torque-ripple-minimization-of-matrix-converter-fed-pmsm-drives-using-advanced 2/18
International Journal of Soft Computing, Mathematics and Control (IJSCMC), Vol. 3, No. 4, Noem!er "#$4
and output oltages and currents and it eploits the pulse 0idth modulation, 0hich 0as deelopedand improed in the $;;#s. he modern techniue, predictie control <5, =5 ealuates the effectof each possi!le s0itching state !& a cost function. he s0itching state 0hich minimi>es the costfunction 0ill !e selected to output. he C eploits the h&steresis comparators and SVMs0itching ta!les to o!tain high/performance ac dries, 0as etended to MC/fed inductionmachines (MC/C) in "##$ ?5. Normall&, MC/C adopts h&steresis comparators ands0itching ta!les 0hich eperiences the t0o ma@or shortcomingsA significant torue ripples andaria!le s0itching freuenc& $45. o oercome these dra0!ac-s, $:5 is implemented 0hichutili>es the dut& c&cle calculation. Since it reduces the torue ripples up to 3# B, it has somedisadantagesA
• It uses multileel h&steresis and su!diided oltage ectors to reduce torue ripple.o iscrete SVM should !e produced to o!tain :< irtual oltage ectors 0ith
different amplitude.• ormation of s0itching ta!le is offline D reuires more accurate calculation.
• *ploits the dut& c&cle control.o Complicated to implement Ddepends on motor parameters.
o aoid all these dra0!ac-s an adanced C techniue is proposed in this paper.• he Model predictie control strateg& is implemented 0ith the MC 7 C fed MSM
motor to minimi>e the torue ripples.• he generali>ed M/C $<5 is approached to reduce the s0itching losses.• he 2ranch and 2ound algorithm $=5 for MSM is carried out to reduce the
computational time of Cost function.
2. MC-DTC TOPOLOGY
2.1. Principle of Matrix converter
he matri conerter haing ; !i/directional s0itches that allo0 an& output phase to !e connectedto an& input phase. he circuit configuration is sho0n in ig.$. he input terminals of theconerter are connected to a three phase po0er suppl&, 0hile the output terminal are connected toa three phase load, li-e an induction motor. he relationship !et0een the input and output oltageand current of MC can !e epressed as
( ) ( ) ( )
( ) ( ) ( ) .
( ) ( ) ( )
a Aa Ab Ac A
b (a (b (c ( i
c Ca Cb Cc C
v ! t ! t ! t v
v ! t ! t ! t v M v
v ! t ! t ! t v
÷ ÷ ÷= =
÷ ÷ ÷ ÷ ÷ ÷
and
( ) ( ) ( )
( ) ( ) ( ) .
( ) ( ) ( )
a Aa (a Ca A
T
b Ab (b Cb ( o
c Ac (c Cc C
i ! t ! t ! t i
i ! t ! t ! t i M i
i ! t ! t ! t i
÷ ÷ ÷= = ÷ ÷ ÷ ÷ ÷ ÷
:"
($)
(")

8/10/2019 TORQUE RIPPLE MINIMIZATION OF MATRIX CONVERTER-FED PMSM DRIVES USING ADVANCED DIRECT TORQUE CON…
http://slidepdf.com/reader/full/torque-ripple-minimization-of-matrix-converter-fed-pmsm-drives-using-advanced 3/18
International Journal of Soft Computing, Mathematics and Control (IJSCMC), Vol. 3, No. 4, Noem!er "#$4
0here s pq(t ) is the state of s0itch S pq, p ∈ E8,2,CF, ∈ Ea, !, cF, and M is the transpose of transfer matri M . heoreticall&, the nine !i/directional s0itches of the matri conerter canassume :$" (";) different s0itching states . 2ut all of them cannot !e emplo&ed usefull&.Irrespectie to the control method of the matri conerter, the choice of s0itching statescom!inations must o!e& 0ith t0o !asic rules.
ig. $. Schematic representation of a matri conerter.
If the conerter is supplied !& a oltage source and feeds an inductie load, the input phasesshould neer !e short/circuited and the output currents should not !e interrupted. rom a practical
point of ie0 these rules impl& that one and onl& one !i/directional s0itch per output phase must !e s0itched on at an& instant. 2ecause of this o!lige, the matri conerter can follo0 "=s0itching com!inations onl&.
ig. ". Gutput line/to/neutral oltage ector configuration
:3

8/10/2019 TORQUE RIPPLE MINIMIZATION OF MATRIX CONVERTER-FED PMSM DRIVES USING ADVANCED DIRECT TORQUE CON…
http://slidepdf.com/reader/full/torque-ripple-minimization-of-matrix-converter-fed-pmsm-drives-using-advanced 4/18
International Journal of Soft Computing, Mathematics and Control (IJSCMC), Vol. 3, No. 4, Noem!er "#$4
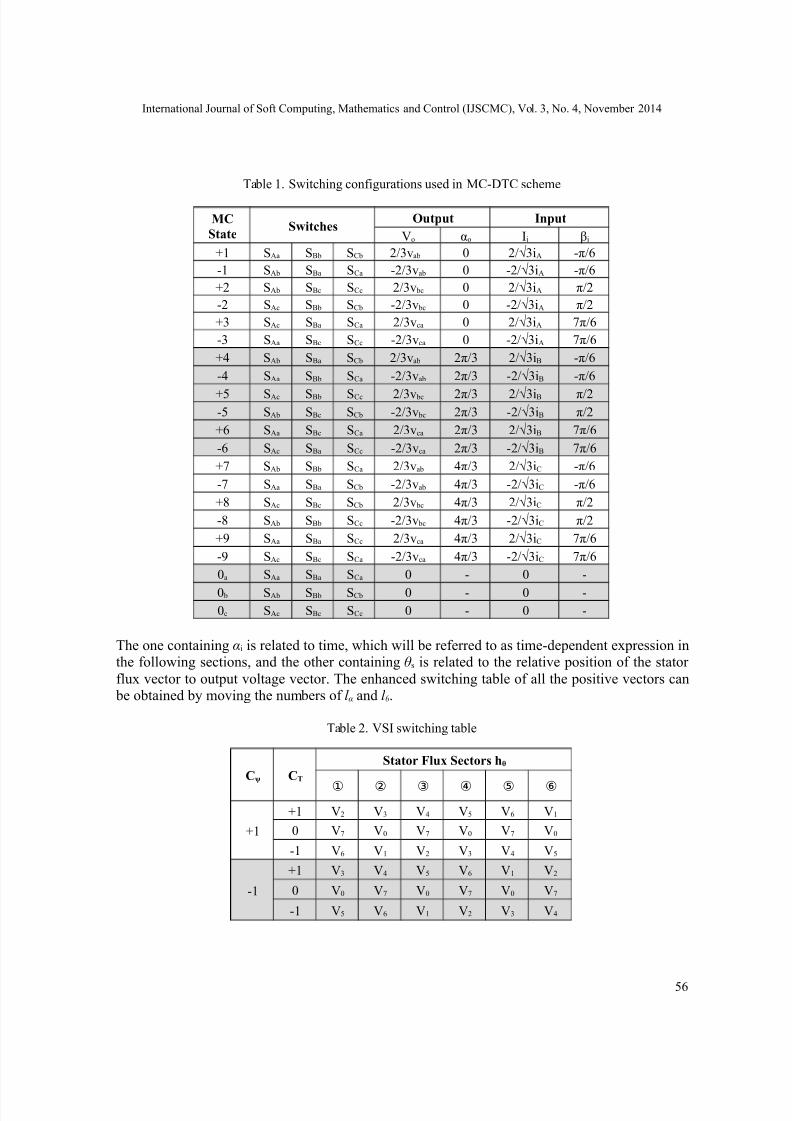
In the "= successie s0itching states, onl& "$ can !e practicall& eploited in the C algorithm.hese configurations are presented in a!le $. he first $? s0itching configurations hae thesame feature of connecting t0o output phases to the same input phase. he corresponding outputline/to/neutral oltage ector and input line current ector, hae fied directions, as representedin igs. " and 3, and 0ill !e named Hactie configurations. he magnitude of these ectorsdepends upon the instantaneous alues of the input line/to/neutral oltages and output linecurrents respectiel& as sho0n in a!le $. hree s0itching configurations regulate >ero inputcurrent and output oltage ectors and 0ill !e named H>ero configurations. he remaining sis0itching configurations hae the three output phases connected to a different input phase.
ig. 3. Input line current ector configuration
2.2. xi!tin" MC-DTC
Normall&, the VSI/C emplo&s one s0itching state from the VSI s0itching ta!le during onesampling period to increase or decrease motor torue or flu $?5. he output oltage ectors of MC hae the same direction as those deliered !& a VSI (V $ V <), as sho0n in ig. ". ence,MC/C !ased on VSI/C can ad@ust the input po0er factor on the grid side and torue andflu on the motor side at the same time, !& means of the second selection of s0itching states. Inig. ", the space is euall& diided into si sectors, 0hich are indeed !& h* (* K $ " " " $ $ $ " <),0ith the first sector coering from+, < to +, <. 8s a result, in each sector, there are t0o outputoltage ectors that hae the same direction as that of the VSI ector, and their related inputcurrent ectors @ust lie on different sides of the input oltage ector, in 0hich 0a& the phase
!et0een input oltages and currents could !e controlled.
he schematic diagram of the *isting MC/C $:5 is presented in ig. 4. Gne desired irtualVSI oltage ector is selected from the VSI s0itching ta!le (see a!le "). hen, one MCs0itching state is emplo&ed $:5 from a!le 3 !ased on the irtual VSI oltage ector. 9hen a>ero/oltage ector is reuired from a!le ", the >ero configuration of the MC, 0hich minimi>esthe num!er of commutations, is selected. he torue and flu are estimated, as sho0n in thelo0er part of ig. 4, in 0hich the reuired output oltage and input current can !e o!tained fromthe input oltage, output current, and transfer matri M .
2.#. D$t% c%cle calc$lation
:4
8/10/2019 TORQUE RIPPLE MINIMIZATION OF MATRIX CONVERTER-FED PMSM DRIVES USING ADVANCED DIRECT TORQUE CON…
http://slidepdf.com/reader/full/torque-ripple-minimization-of-matrix-converter-fed-pmsm-drives-using-advanced 5/18
International Journal of Soft Computing, Mathematics and Control (IJSCMC), Vol. 3, No. 4, Noem!er "#$4
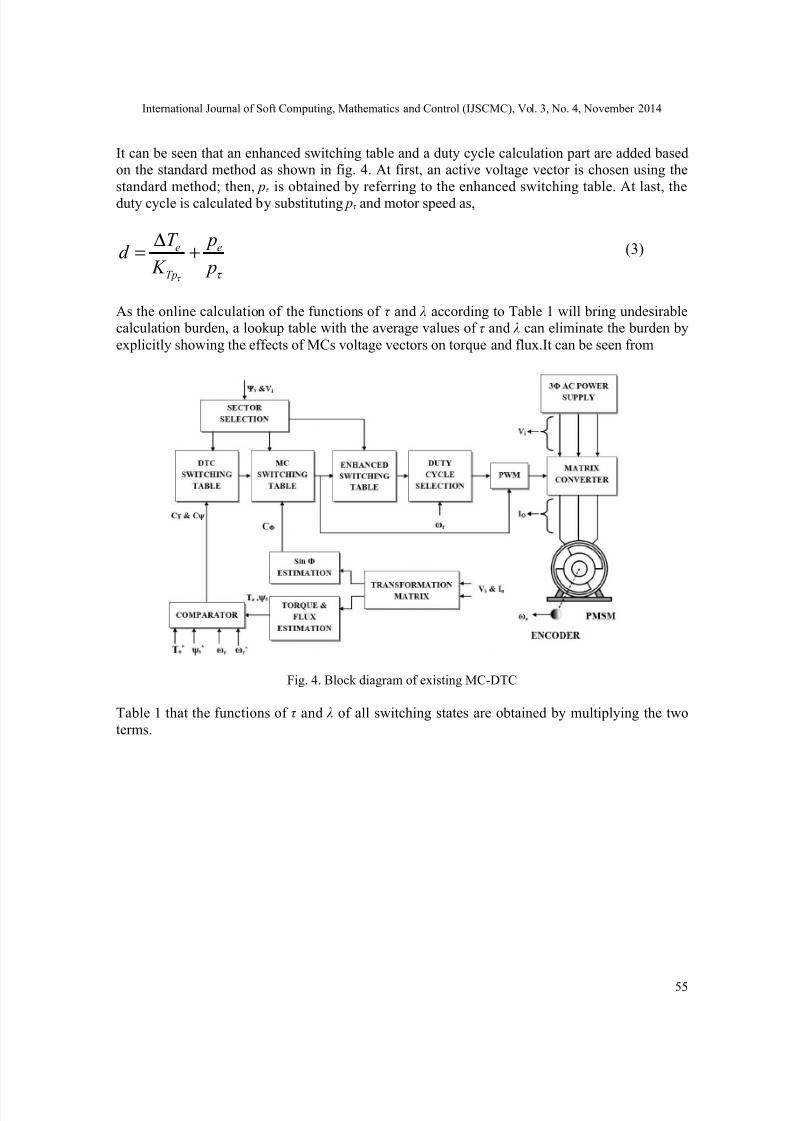
It can !e seen that an enhanced s0itching ta!le and a dut& c&cle calculation part are added !asedon the standard method as sho0n in fig. 4. 8t first, an actie oltage ector is chosen using thestandard methodL then, p is o!tained !& referring to the enhanced s0itching ta!le. 8t last, thedut& c&cle is calculated !& su!stituting p and motor speed as,
e e
Tp
T pd
. pτ τ
∆= +
8s the online calculation of the functions of and / according to a!le $ 0ill !ring undesira!lecalculation !urden, a loo-up ta!le 0ith the aerage alues of and / can eliminate the !urden !&eplicitl& sho0ing the effects of MCs oltage ectors on torue and flu.It can !e seen from
ig. 4. 2loc- diagram of eisting MC/C
a!le $ that the functions of and / of all s0itching states are o!tained !& multipl&ing the t0oterms.
::
(3)
8/10/2019 TORQUE RIPPLE MINIMIZATION OF MATRIX CONVERTER-FED PMSM DRIVES USING ADVANCED DIRECT TORQUE CON…
http://slidepdf.com/reader/full/torque-ripple-minimization-of-matrix-converter-fed-pmsm-drives-using-advanced 6/18
International Journal of Soft Computing, Mathematics and Control (IJSCMC), Vol. 3, No. 4, Noem!er "#$4
a!le $. S0itching configurations used in MC/C scheme
MC
&tate&'itc(e!
O$tp$t Inp$t
Vo o Ii i
O$ S8a S2! SC! "63a! # "6P3i8 /Q6</$ S8! S2a SCa /"63a! # /"6P3i8 /Q6<O" S8! S2c SCc "63 !c # "6P3i8 Q6"/" S8c S2! SC! /"63 !c # /"6P3i8 Q6"O3 S8c S2a SCa "63ca # "6P3i8 =Q6</3 S8a S2c SCc /"63ca # /"6P3i8 =Q6<O4 S8! S2a SC! "63a! "Q63 "6P3i2 /Q6</4 S8a S2! SCa /"63a! "Q63 /"6P3i2 /Q6<
O: S8c S2! SCc "63 !c "Q63 "6P3i2 Q6"/: S8! S2c SC! /"63 !c "Q63 /"6P3i2 Q6"O< S8a S2c SCa "63ca "Q63 "6P3i2 =Q6</< S8c S2a SCc /"63ca "Q63 /"6P3i2 =Q6<O= S8! S2! SCa "63a! 4Q63 "6P3iC /Q6</= S8a S2a SC! /"63a! 4Q63 /"6P3iC /Q6<O? S8c S2c SC! "63 !c 4Q63 "6P3iC Q6"/? S8! S2! SCc /"63 !c 4Q63 /"6P3iC Q6"O; S8a S2a SCc "63ca 4Q63 "6P3iC =Q6</; S8c S2c SCa /"63ca 4Q63 /"6P3iC =Q6<#a S8a S2a SCa # / # /
# ! S8! S2! SC! # / # /#c S8c S2c SCc # / # /
he one containing *i is related to time, 0hich 0ill !e referred to as time/dependent epression inthe follo0ing sections, and the other containing 0 s is related to the relatie position of the stator flu ector to output oltage ector. he enhanced s0itching ta!le of all the positie ectors can
!e o!tained !& moing the num!ers of l * and l 0 .
a!le ". VSI s0itching ta!le
C) CT
&tator *l$x &ector! (+
① ② ③ ④ ⑤ ⑥
O$
O$ V" V3 V4 V: V< V$
# V= V# V= V# V= V#
/$ V< V$ V" V3 V4 V:
/$
O$ V3 V4 V: V< V$ V"
# V# V= V# V= V# V=
/$ V: V< V$ V" V3 V4
:<

8/10/2019 TORQUE RIPPLE MINIMIZATION OF MATRIX CONVERTER-FED PMSM DRIVES USING ADVANCED DIRECT TORQUE CON…
http://slidepdf.com/reader/full/torque-ripple-minimization-of-matrix-converter-fed-pmsm-drives-using-advanced 7/18
International Journal of Soft Computing, Mathematics and Control (IJSCMC), Vol. 3, No. 4, Noem!er "#$4
a!le 3. MC s0itching ta!le
(, C&I ector!
V$ V" V3 V4 V: V<
①O$ /3 O; /< O3 /; O</$ O$ /= O4 /$ O= /4
②O$ O" /? O: /" O? /:/$ /3 O; /< O3 /; O<
③O$ /$ O= /4 O$ /= O4/$ O" /? O: /" O? /:
④O$ O3 /; O< /3 O; /</$ /$ O= /4 O$ /= O4
⑤O$ /" O? /: O" /? O:/$ O3 /; O< /3 O; /<
⑥O$ O$ /= O4 /$ O= /4/$ /" O? /: O" /? O:
#. M/T0M/TIC/L MODLLING O* PM&M
In the rotating d /q frame, the d&namics of the surface mounted MSM is descri!ed as $;5
( ) $( ) ( ( ) )mr
r e m
m m
(d t t T t T
dt 1 1
ω ω = − + −
( ) $( ) ( ) ( ) ( )d s
d e d d
di t 2i t t i t v t
dt 3 3ω = − + +
( ) $ $( ) ( ) ( ) ( ) ( )
q sq e d e m q
di t 2i t t i t t v t
dt 3 3 3ω ω λ = − − − +
0here 4r (t ) is the rotor speed, 4e(t ) is the electrical rotational rotor speed, id (t ) and iq(t ) are thestator current in d /q frame, respectiel&. he electromagnetic torue of MSM is epressed as"#5
3 R R" sin R R ( ) sin "
4
se f q s q d
d q
pT 3 3 3
3 3
ψ ψ δ ψ δ = − −
0here 5 is the displacement angle !et0een the stator and permanent/magnet flu lin-age, 6 f is the permanent/magnet flu, 3d and 3 are the direct and uadrature stator inductances, respectiel&,and p is the num!er of pole pairs. rom (=), the change rate of torue can !e deried as
3 R Rcos R R ( ) cos "
"
se f q s q d
d q
pd d T 3 3 3
dt 3 3 dt
ψ δ ψ δ ψ δ = − −
:=
(4)
(:)
(<)
(=)
(?)

8/10/2019 TORQUE RIPPLE MINIMIZATION OF MATRIX CONVERTER-FED PMSM DRIVES USING ADVANCED DIRECT TORQUE CON…
http://slidepdf.com/reader/full/torque-ripple-minimization-of-matrix-converter-fed-pmsm-drives-using-advanced 8/18
International Journal of Soft Computing, Mathematics and Control (IJSCMC), Vol. 3, No. 4, Noem!er "#$4
he deriatie of 5 is gien !&( )
s r s r
d d
dt dt
θ θ δ ω ω
−= = −
0here 0 s and 0 r are the stator and rotor positions, respectiel&, and 4r is the rotor electrical angular elocit&.
. /D/NCD DTC
In this paper, the generali>ed C scheme 0ith Model redictie control is approached in ig.:.ere predictie control consists a model of the 0hole conerter and MSM in order to predict thes&stem !ehaiour after a computation period for each possi!le MC configuration. 8fter that a costfunction 0ill !e used to determine the configuration 0hich is to !e applied for the net computing
period.
.1. Moel Preictive control
In Model redictie Control "$5, the current control input is attained !& soling at each samplinginstant an inhi!ited optimal control pro!lem !ased on the predictions deliered !& an internalmodel of the controlled process. 1enerall& the optimal control pro!lem is formulated oer a finiteor infinite hori>on. he underl&ing optimi>ation procedure profits an optimal control seuence0hich minimi>es an o!@ectie function. he first control input of this seuence is applied inaccordance 0ith the so called receding hori>on polic&. 8t the net sampling instant, the controlseuence is recomputed oer a shifted hori>on, thus proiding feed!ac-.
.2. Recein" (ori3on polic%
he MC algorithm finds the seuence of optimal input u(-) that satisfies gien constraints ""5.rom that seuence of optimal input u(-), onl& the first input is applied to plant for net samplinginteral. he 0hole process is repeated for net samples. his method of optimi>ation of u is-no0n as online optimi>ation. he prediction hori>on -eeps on shifting to0ards right after eachsample and the si>e of prediction hori>on remains constant as sho0n in fig. <. So that thismechanism is termed as receding hori>on polic&.
:?
(;)

8/10/2019 TORQUE RIPPLE MINIMIZATION OF MATRIX CONVERTER-FED PMSM DRIVES USING ADVANCED DIRECT TORQUE CON…
http://slidepdf.com/reader/full/torque-ripple-minimization-of-matrix-converter-fed-pmsm-drives-using-advanced 9/18
International Journal of Soft Computing, Mathematics and Control (IJSCMC), Vol. 3, No. 4, Noem!er "#$4
ig. :. 2loc- diagram of 8danced MC/C.
.#. Moellin" of MP-DTC !c(e4e
.#.1. Per4anent Ma"net &%nc(rono$! Mac(ine Moel
he MSM can !e modelled 0ith the help of state space euations in the dq rotor frame ($#)0here 7 d , 7 q and 8 d , 8 q are stator currents and oltages epressed in the dq frame, 2 and 3 are thestator 0inding resistor and inductance respectiel&, 4 is the rotor angular speed and 9 is the flu
produced !& permanent magnets ""5.
( )
$( ) # #
( )( ). . ( ) ( )
( )( ) $ ( )( ) #
t d d
d q
2t
7 t 7 t 3 38 t 8 t
7 t 7 t 2 t t
3 3 3
ω
φ ω
ω
− ÷ ÷ = + ÷ ÷ ÷ ÷ ÷ ÷ ÷ − − − ÷ ÷
&
&
he Model parameters ( 2, 3 and 9) can !e considered as constant and rotor electrical speed ( 4)ariations can !e a!andoned for a short sampling period of the algorithm. ence the follo0ingmodel can !e found 0ith a first order *uler integration.
#$ ( ) #( $) ( ) ( ). .
( $) ( ) ( ) ( )( ) $ #
d d d
q q q
2T T T ' 7 ' 7 ' 8 ' 3 3T
7 ' 7 ' 8 ' 2T T ' T ' 3
3 3
ω
φ ω
ω
− ÷ ÷+ ÷= + + ÷ ÷ ÷ ÷ ÷ ÷+ − ÷ ÷ − − ÷ ÷
( )( $) ( ). ( ) ( )
( )
d
q
8 ' : ' A ' : ' ( '
8 '
+ = + + Φ ÷
:;
($#)
($$)
($")
8/10/2019 TORQUE RIPPLE MINIMIZATION OF MATRIX CONVERTER-FED PMSM DRIVES USING ADVANCED DIRECT TORQUE CON…
http://slidepdf.com/reader/full/torque-ripple-minimization-of-matrix-converter-fed-pmsm-drives-using-advanced 10/18
International Journal of Soft Computing, Mathematics and Control (IJSCMC), Vol. 3, No. 4, Noem!er "#$4
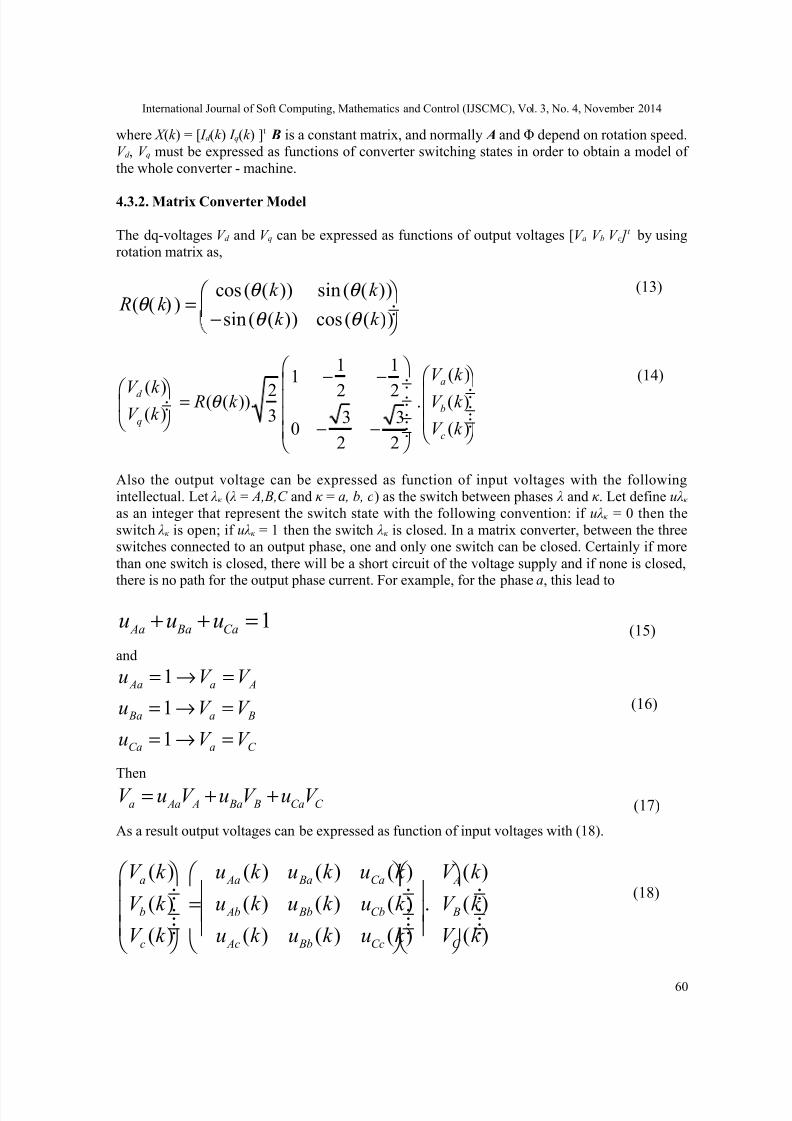
0here : (' ) K 7 d (' ) 7 q(' ) 5t B is a constant matri, and normall& A and depend on rotation speed.8 d , 8 q must !e epressed as functions of conerter s0itching states in order to o!tain a model of the 0hole conerter / machine.
.#.2. Matrix Converter Moel
he d/oltages 8 d and 8 q can !e epressed as functions of output oltages 8 a 8 b 8 c ;t !& using
rotation matri as,
cos ( ( )) sin ( ( ))( ( ) )
sin ( ( )) cos ( ( ))
' ' 2 '
' '
θ θ θ
θ θ
= ÷−
$ $( )$
( ) " " "( ( )). . ( )( ) 3 3 3
( )#" "
a
d b
q
c
8 '
8 ' 2 ' 8 ' 8 '
8 '
θ
− − ÷ ÷ ÷= ÷ ÷ ÷ ÷− − ÷
8lso the output oltage can !e epressed as function of input oltages 0ith the follo0ingintellectual. Tet /< ( / K A""C and < K a" b" c) as the s0itch !et0een phases / and < . Tet define u/<
as an integer that represent the s0itch state 0ith the follo0ing conentionA if u/< K # then thes0itch /< is openL if u/< K $ then the s0itch /< is closed. In a matri conerter, !et0een the threes0itches connected to an output phase, one and onl& one s0itch can !e closed. Certainl& if morethan one s0itch is closed, there 0ill !e a short circuit of the oltage suppl& and if none is closed,there is no path for the output phase current. or eample, for the phase a, this lead to
$ Aa (a Ca
u u u+ + =and
$
$
$
Aa a A
(a a (
Ca a C
u 8 8
u 8 8
u 8 8
= → =
= → =
= → =
hen
a Aa A (a ( Ca C 8 u 8 u 8 u 8 = + +8s a result output oltages can !e epressed as function of input oltages 0ith ($?).
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) . ( )
( ) ( ) ( ) ( ) ( )
a Aa (a Ca A
b Ab (b Cb (
c Ac (b Cc C
8 ' u ' u ' u ' 8 '
8 ' u ' u ' u ' 8 '
8 ' u ' u ' u ' 8 '
÷ ÷ ÷= ÷ ÷ ÷ ÷ ÷ ÷
<#
($3)
($4)
($:)
($?)
($<)
($=)

8/10/2019 TORQUE RIPPLE MINIMIZATION OF MATRIX CONVERTER-FED PMSM DRIVES USING ADVANCED DIRECT TORQUE CON…
http://slidepdf.com/reader/full/torque-ripple-minimization-of-matrix-converter-fed-pmsm-drives-using-advanced 11/18
International Journal of Soft Computing, Mathematics and Control (IJSCMC), Vol. 3, No. 4, Noem!er "#$4
8lso the *n ($:) can !e 0ritten for phase b and cL !& the 0a& there are "= allo0a!le s0itchingconfigurations for a three/phase to three/phase matri conerter. hese conerter configurationscan !e diided into three groups. In the first one, each output phase is connected to a differentinput phase (e.g. u Aa K u b K uCc K $). he corresponding output oltage ectors (in the *= stator frame) hae a constant amplitude and a aria!le direction. here is si configurations in thisgroup. In the second group, each output phase is connected to the same input phase (e.g. u Aa K u b
K uCc K $) here is three configurations in this group. he& lead to a null output oltage ector.inall& the eighteen other configurations are in the third group. 0o outputs are connected to thesame input (e.g. u Aa K u b K uCc K $). he corresponding output oltage ectors (in the *= stator frame) hae a constant direction and a aria!le amplitude. It is 0orth to note that, for each paper cited in reference, the si configurations from the first group are not considered. redictiecontrol can use these configurations.
.#.#. Moel of t(e '(ole converter 5 4ac(ine
irstl& 0ith ($), (") and ($?), if output currents, input oltages (8 in K 8 A 8 8 c 5
) , angular position and speed are measured, it is possi!le to predict eer& possi!le state ector after asampling period : n(' O $) ($ > n > "=) for each possi!le conerter configuration U n ($;).
( $) ( ). ( ) . ( ( )). . ( ). ( ) ( )n n in : ' A ' : ' ( 2 ' C ? ' 8 ' ' θ + = + + Φ
Secondl& as it is possi!le to achiee for currents a similar reasoning than the one used todemonstrate ($?), it is also possi!le to predict input currents in a fied frame A after a sampling
period for each conerter configuration ("#).
$
$ $ $ $$ $( $) " " " " "
. ( ).( $) 3 3 3 3 3
# #" " " "
( $). ( ) .
( $)
An t
n
(n
An
(n
7 ' ? '
7 '
7 ' 2 '
7 '
−
− − − − ÷ ÷+ ÷ ÷= ÷+ ÷ ÷ − − ÷ ÷ +
÷+ .#.. Co!t *$nction
8 cost function is used to determine 0hich configuration must !e applied. 8s the main goal of thecontrol scheme is to control output currents, a first cost function is proposed as the sum of differences !et0een the reference currents Id
U , I
U and the predicted currents ("$).
V U UR ( $) R R ( $) R . R sin( ( $)) R
n d dn q qn in@ 7 7 ' 7 7 ' c ' φ = − + + − + + +
9ith this cost function, onl& output currents are controlled. o0eer the matri conerter structure also allo0s to control input po0er factor. So input currents are computed 0ith ("#) inorder to compute the angle !et0een input current ector and input oltage ector if theconfiguration n is applied (9in). hen a third term is added in ("$) to ta-e into account input po0er factor and in order to ma-e it as close to unit& as possi!le ("").
<$
($;)
("#)
("$)

8/10/2019 TORQUE RIPPLE MINIMIZATION OF MATRIX CONVERTER-FED PMSM DRIVES USING ADVANCED DIRECT TORQUE CON…
http://slidepdf.com/reader/full/torque-ripple-minimization-of-matrix-converter-fed-pmsm-drives-using-advanced 12/18
International Journal of Soft Computing, Mathematics and Control (IJSCMC), Vol. 3, No. 4, Noem!er "#$4
V U UR ( $) R R ( $) R . R sin( ( $)) Rn d dn q qn in@ 7 7 ' 7 7 ' c ' φ = − + + − + + +
(a)
(!)
ig.<. MC operating principle. (a)heoretical case. (!) Implementation case
In ("") c is a 0eighting factor. 8ctuall& the instantaneous angle !et0een input current ector andinput oltage ector is used as a 0a& to act on input po0er factor. 9ith c, it is possi!le to o!tain atrade/off !et0een output current control and input po0er factor controls.
6. 7R/NC0 /ND 7OUND /LGORIT0M *OR MPC
he rediction of future !ehaiour is not er& simple from computational cost point of ie0. It !ecomes reall& comple 0hen prediction is to !e made for fe0 samples. he 2D2 approach $=5is !ased on the total set of feasi!le solutions that can !e partitioned into su!set of solutions 0hichare estimated to get the finest solution "45. 2ounding alue is the maimum cost at 0hich the
particular solution 0ill !e discarded and should not !e !ranched further. 2ranch and !oundscheme reduces the computational cost in three 0a&sA
• reious s0itching position of the MC is considered as the root node 0hich is further !ranched to its eight possi!le positions. hen each of the eight possi!le s0itching positions
<"
("")

8/10/2019 TORQUE RIPPLE MINIMIZATION OF MATRIX CONVERTER-FED PMSM DRIVES USING ADVANCED DIRECT TORQUE CON…
http://slidepdf.com/reader/full/torque-ripple-minimization-of-matrix-converter-fed-pmsm-drives-using-advanced 13/18
International Journal of Soft Computing, Mathematics and Control (IJSCMC), Vol. 3, No. 4, Noem!er "#$4
is to !e further !ranched to net eight possi!le positions. 2ut using the !ranch and !oundalgorithm, if an& s0itching position at first leel is found to !e unfeasi!le, it is not !ranchedi.e.it has reached the allo0a!le !ound so that node 0ill not !e further !ranched. Gne
particular case is eplained in ig. =. ere the minimum si>e of N is ". he root node is E$$#F. Suppose that four nodes at first leel E$# #F, E# $ $F, E# # $F and E$ # $F are not feasi!ledue to iolating either torue or flu limits. So these s0itching positions are not further
!ranched. It saes computational efforts at leel " and net leels if N is greater than ".• If at stage during the scan, a seuence is found 0ith minimum cost, the scanning process is
stopped and that seuence is decided as the most suita!le one.• 2efore enumerating an& node, the minimum possi!le cost of its child node seuences is
calculated from maimum s0itching seuence length. It is compared 0ith minimum costo!tained so far. If it is greater than the minimum cost till that stage, that particular node isdiscarded.
ig.=. 8n *ample of 2ranch D 2ound
8. *LO9 C0/RT O* MPC /LGORIT0M
he flo0chart for the proposed MC methodolog& is deried as per the 2ranch and 2ound8lgorithm and it is illustrated in the fig.?
<3

8/10/2019 TORQUE RIPPLE MINIMIZATION OF MATRIX CONVERTER-FED PMSM DRIVES USING ADVANCED DIRECT TORQUE CON…
http://slidepdf.com/reader/full/torque-ripple-minimization-of-matrix-converter-fed-pmsm-drives-using-advanced 14/18
International Journal of Soft Computing, Mathematics and Control (IJSCMC), Vol. 3, No. 4, Noem!er "#$4
ig.?. lo0 Chart of roposed MC 7 2ranch D 2ound 8lgorithm
:. &IMUL/TION R &ULT
he Simulation studies are carried out in M8T826Simulin- to alidate the proposed MC/Cscheme for a <## 9 MSM drie s&stem. he considerations of the MSM are gien as follo0s.he rated po0er is <## 9Lmaimum speed is 3### +ML 2 s K #.$<: WL 3d K #."<? mL 3q K#.34" mL the oltage constant . e K ?.= V6-+ML the num!er of pole pairs is p K 4L and themomentum of inertia is 1 K #.#####? -gXm". he s0itching freuenc& of MC/SVM scheme is $#->, 0hich is t&picall& used in practical motor drie s&stems. he Simulin- diagram is sho0n infig.;. irstl&, at # sec. the MSM is operated at $# Nm Toad orue and then sudden changes of $: Nm, "# Nm and : Nm are applied at #.: sec, $ sec and $.: sec respectiel&. he stead&/state
performances of the proposed MC/C are sho0n in fig.$#. Moreoer, the proposed C canoutput a larger mean torue at the same operating condition, 0hich is important for drie s&stems
<4

8/10/2019 TORQUE RIPPLE MINIMIZATION OF MATRIX CONVERTER-FED PMSM DRIVES USING ADVANCED DIRECT TORQUE CON…
http://slidepdf.com/reader/full/torque-ripple-minimization-of-matrix-converter-fed-pmsm-drives-using-advanced 15/18
International Journal of Soft Computing, Mathematics and Control (IJSCMC), Vol. 3, No. 4, Noem!er "#$4
ig. ; . Simulin- iagram of roposed MC/C
.0 0.5 1 1.5
-400
-300
-200
-100
0
100
200
300
400
Time in Sec
R o t o r S p e e d i n w m
ROTOR SPEED
(a)
0 0.5 1 1.5-400
-300
-200
-100
0
100
200
300
400ELECTROMAGNETIC TORQUE
Time in Sec
E l e c t r o m a g n e t i c T o r q u e T m
(!)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4-500
-400
-300
-200
-100
0
100
200
300
400
500
Time in Sec
C u r r e n t ( A )
STATOR CURRENT ( ia, ib, ic )
(c)ig.$#.Stead& state response.(a)+otor speed,(!)*lectromagnetic orue, (c) Stator current i aD i !
<:

8/10/2019 TORQUE RIPPLE MINIMIZATION OF MATRIX CONVERTER-FED PMSM DRIVES USING ADVANCED DIRECT TORQUE CON…
http://slidepdf.com/reader/full/torque-ripple-minimization-of-matrix-converter-fed-pmsm-drives-using-advanced 16/18
International Journal of Soft Computing, Mathematics and Control (IJSCMC), Vol. 3, No. 4, Noem!er "#$4
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-500
-400
-300
-200
-100
0
100
200
300
400
500
INPUT RESPONSE OF THE MATRIX CONVERTER
Time in Sec
V o l t a g e ( V ) &
C u r r e n t ( A )
(a)
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-800
-600
-400
-200
0
200
400
600
800OUTPUT RESPONSE OF THE MATRIX CONVERTER
Time in Sec
V o l t a g e ( V ) & C u r r e n t ( A )
(!)
(c)
ig.$$. Stead& state response. (a)Input Voltage D Current,(!) Gutput Voltage D Current, (c) anal&sis of MCcurrent
;. CONCLU&ION /ND *UTUR 9OR<
In this paper, an adanced C scheme for MC fed MSM has !een introduced. he methodretains adantages inherited from the conentional *nhanced ta!le/ ut& c&cle estimationtechniue of C, and decreases the torue ripples 0ith the help of MC algorithm !&emplo&ing 2ranch and 2ound method. his method is more direct and a!le to adopt 0ith onlineestimation. In the future, this control method 0ill !e improed !& deriing more accuratealgorithm, in order to reach a milestone !& 0hich the torue ripple can !e reduced fairl&.
<<
8/10/2019 TORQUE RIPPLE MINIMIZATION OF MATRIX CONVERTER-FED PMSM DRIVES USING ADVANCED DIRECT TORQUE CON…
http://slidepdf.com/reader/full/torque-ripple-minimization-of-matrix-converter-fed-pmsm-drives-using-advanced 17/18
International Journal of Soft Computing, Mathematics and Control (IJSCMC), Vol. 3, No. 4, Noem!er "#$4
R *RNC&
$5 . She, . Tin, 2. e, Y. 9ang, T. Zue, and Y. 8n, HImplementation of oltage/!ased commutationin space/ector/modulated matri conerter, I*** rans. Ind. *lectron., ol. :;, no. $, pp. $:47$<<,
Jan. "#$"."5 C. Yia, . Song, . Shi, and Z. Zan, HChaotic d&namics characteristic anal&sis for matri conerter,
I*** rans. Ind. *lectron., ol. <#, no. $, pp. =?7?=, Jan. "#$3.35 J. +odrigue>, M. +iera, J. %olar, and . 9heeler, H8 reie0 of control and modulation methods for
matri conerters, I*** rans. Ind. *lectron., ol. :;, no. $, pp. :?7=#, Jan. "#$".45 M. Venturini, H8 ne0 sine 0ae in sine 0ae out, conersion techniue 0hich eliminates reactie
elements, in roc. o0ercon =, $;?#, pp. *36$7*36$:.:5 Y. 9ang, . Tin, . She, and 2. eng, H8 research on space ector modulation strateg& for matri
conerter under a!normal input/oltage conditions, I*** rans. Ind. *lectron., ol. :;, no. $, pp.;37$#4, Jan. "#$".
<5 M. +iera, 8. 9ilson, C. 8. +o@as, J. +odrigue>, J. +. *spino>a, . 9. 9heeler, and T. *mpringham,H8 comparatie assessment of model predictie current control and space ector modulation in adirect matri conerter, I*** rans. Ind. *lectron., ol. <#, no. ", pp. :=?7:??, e!. "#$3.
=5 S. %ouro, . Cortes, +. Vargas, '. 8mmann, and J. +odrigue>, HModel predictie control, a simpleand po0erful method to control po0er conerters, I*** rans. Ind. *lectron., ol. :<, no. <, pp.$?"<7$?3?, Jun. "##;.
?5 . Casadei, 1. Serra, and 8. ani, Hhe use of matri conerters in direct torue control of inductionmachines, I*** rans. Ind. *lectron., ol. 4?, no. <, pp. $#:=7$#<4, ec. "##$.
;5 C. Grtega, 8. 8rias, C. Caruana, J. 2alcells, and 1. 8sher, HImproed 0aeform ualit& in the directtorue control of matri/conerter/fed MSM dries, I*** rans. Ind. *lectron., ol. :=, no. <, pp."$#$7"$$#, Jun. "#$#.
$#5 %./2. Tee and . 2laa!@erg, HSensorless C/SVM for induction motor drien !& a matri conerter using a parameter estimation strateg&, I*** rans. Ind. *lectron., ol. ::, no. ", pp. :$"7:"$, e!."##?.
$$5 J. 9ang and J. Jiang, HVaria!le/structure direct torue control for induction motor drien !& a matriconerter 0ith oer modulation strateg&, in roc. <th I*** I*MC, Ma& "##;, pp. :?#7:?4.
$"5 . Yiao and M. . +ahman, HSensorless direct torue and flu controlled IM s&nchronous machinefed !& matri conerter oer a 0ide speed range, I*** rans. Ind. Informat., ol. ;, no. 4, pp. $?::7 $?<=, No. "#$3.
$35 *. Zamamoto, . ara, . 'chino, M. %a0a@i, . J. %ume, J./%. %ang, and ./. %rug, Heelopmentof MCs and its applications in industr&, I*** Ind. *lectron. Mag., ol. :, no. $, pp. 47$", Mar. "#$$.
$45 1. S. 2u@a and M. . %a>mier-o0s-i, Hirect torue control of 9M inerter/fed ac motors[8sure&, I*** rans. Ind. *lectron., ol. :$, no. 4, pp. =447=:=, 8ug. "##4.
$:5 C.Yia, J.\hao, Z.Zan, and .Shi , H8 Noel irect orue Control of Matri Conerter/ed MSMries 'sing ut& C&cle Control for orue +ipple +eduction, I*** rans.Ind.*lectron, ol. <$,no. <, pp. "=##/"=$3, Jun. "#$4.
$<5 .1e&er, and 1.apafotiou, HModel redictie irect orue Control of a Varia!le Speed rie 0ith aie/Teel Inerter, I*** Industrial *lectronics, 3:th 8nnual Conference , pp.$"#3/$"#?, No."##;
$=5 M. 8. Naeem, and %. M. asan , Hirect orue Control (C) of hree hase Induction Motor using Model !ased redictie Control (MC) scheme deplo&ing 2ranch and 2ound 8lgorithm,IC+*+8 "#$3, Madrid, Spain, Gct. "#$3
$?5 I. a-ahashi and . Noguchi, H8 ne0 uic- response and high efficienc& control strateg& for aninduction motor, I*** rans. Ind. *lectron., ol. I*/"", no. :, pp. ?"#7?"=, Sep. $;?<.
$;5 J. \houa and Z. 9ang, H+eal/time nonlinear adaptie !ac- stepping speed control for a Ms&nchronous motor, Control *ng. ract., ol. $3, pp. $":;7 $"<;, "##:.
"#5 T. \hong, M. +ahman, 9. u, and %. Tim, H8nal&sis of direct torue control in permanent magnets&nchronous motor dries, I*** rans. o0er *lectron., ol. $", no. 3, pp. :"?7:3<, Ma& $;;=.
"$5 C. *. 1arcia, . M. rett, and M. Morari, HModel predictie controlA heor& and practice 7 a sure&,8utomatica, ol. ":, no. 3, pp. 33:734?, Mar. $;?;.
<=

8/10/2019 TORQUE RIPPLE MINIMIZATION OF MATRIX CONVERTER-FED PMSM DRIVES USING ADVANCED DIRECT TORQUE CON…
http://slidepdf.com/reader/full/torque-ripple-minimization-of-matrix-converter-fed-pmsm-drives-using-advanced 18/18
International Journal of Soft Computing, Mathematics and Control (IJSCMC), Vol. 3, No. 4, Noem!er "#$4
""5 M.an, .Tin , and .Tan , HModel redictie irect orue Control for SMSM 0ith Toad 8ngleTimitation, rogress In *lectromagnetics +esearch 2, Vol. :?, "4: /":<, Mar."#$4
"35 M. acas and J. 9e!er, Hredictie direct torue control for the M s&nchronous machine, I***rans. Ind. *lectron., ol. :", no. :, pp. $3:#7$3:<, Gct. "##:.
"45 . 1e&er, HTo0 compleit& model predictie control in po0er electronics and po0er s&stems, h..dissertation, 8utomatic Control Ta!orator& * \urich, "##:.
/$t(or!
Mr.&.<annan = e completed his 2.* in *lectrical and *lectronics *ngineering from SasurieCollege of *ngineering, irupur, India and currentl& doing M.* in %.S.+. College of *ngineering ,iruchengode, India. e 0or-ed as a Tecturer in M.%umarasam& College of *ngineering, %arur, India for " &ears. is area of interest includes *lectrical Machines,o0er *lectronics D Soft computing echniues.
Mr.&.C(innai%a= e completed his M.* in o0er *lectronics and ries from 8nna'niersit&, Chennai, India and pursuing h. under 8nna 'niersit&, Chennai. e is a
lifetime mem!er in IS*. 8t present he is 0or-ing as an 8ssistant rofessor in ***epartment at %S+ College of *ngineering, iruchengode, India. is area of interest includesMatri Conerter, o0er ]ualit&, and Intelligent Controllers.
Dr.&.U.Pra>(a, She completed her M.*. in *lectrical Machines from 2harathiar 'niersit&,Coim!atore, India and her h. in o0er S&stems from Multimedia 'niersit&, Mala&sia. Sheis a lifetime mem!er in IS* and also a mem!er of I***. 8t present she is 0or-ing as arofessor and ead in *** epartment at Sri +ama-rishna *ngineering College, Coim!atore,India. She is a reie0er for arious International Journals. She has pu!lished more than "# research papersin arious International Journals and Conferences. er areas of interest are o0er S&stems and *lectrialMachines.
<?