transducer models 10 - iowa state universitye_m.350/transducer models 10.pdf · two port and three...
TRANSCRIPT

Transducer Modeling
Learning Objectives
Two port and three port transducer modelsSittig modelMason modelKLM Model
Acoustic radiation impedance
Transducer sensitivity, impedance
The sound generation process
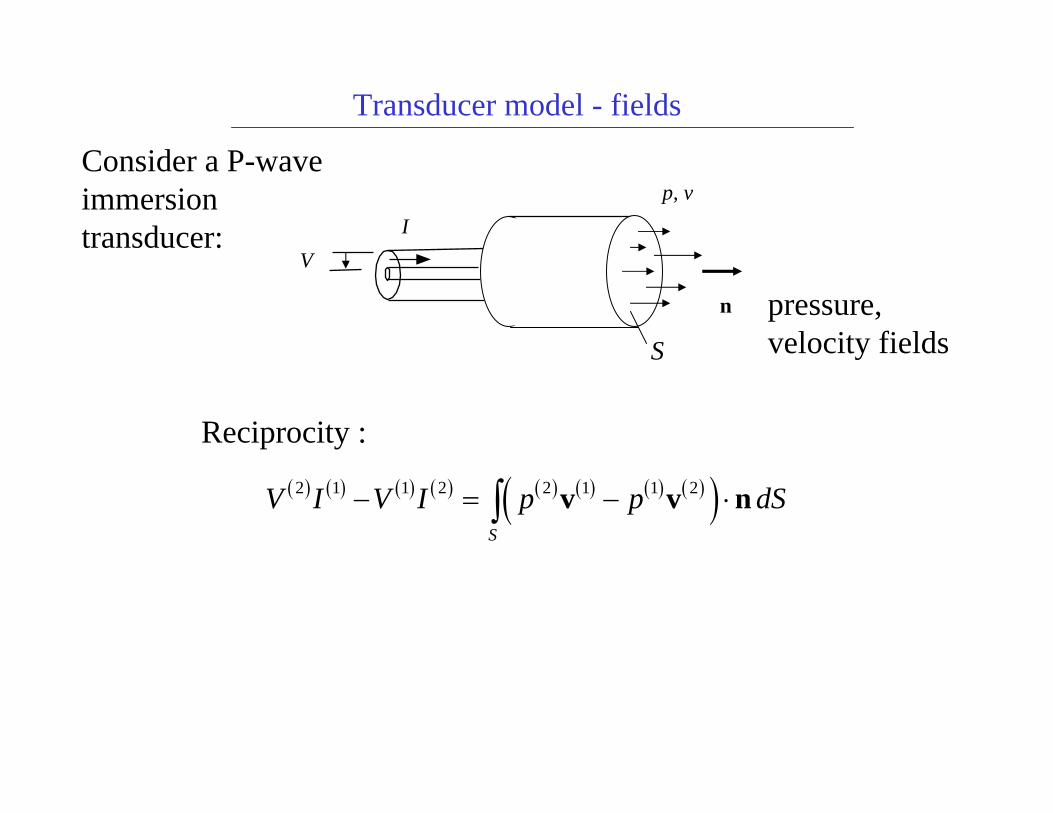
Transducer model - fields
Reciprocity :( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )( )2 1 1 2 2 1 1 2
S
V I V I p p dS− = − ⋅∫ v v n
Consider a P-waveimmersiontransducer:
pressure,velocity fields
p, v
VI
n
S

voltage
current
compressive force
velocity, v(x,ω)
( ) ( )( ) ( )
,
,S
v
F p dS
ω ω
ω ω
=
= ∫v x n
x
Transducer model- ‘lumped’ parameters
so reciprocity becomes:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )2 1 1 2 2 1 1 2V I V I F v F v− = −
Forpiston behavior
( ) ( ) ( ) ( ), ,p dS F vω ω ω ω⋅ =∫ x v x n
VI
Fv
pressure, p(x,ω)

[TA]V
I
F
v
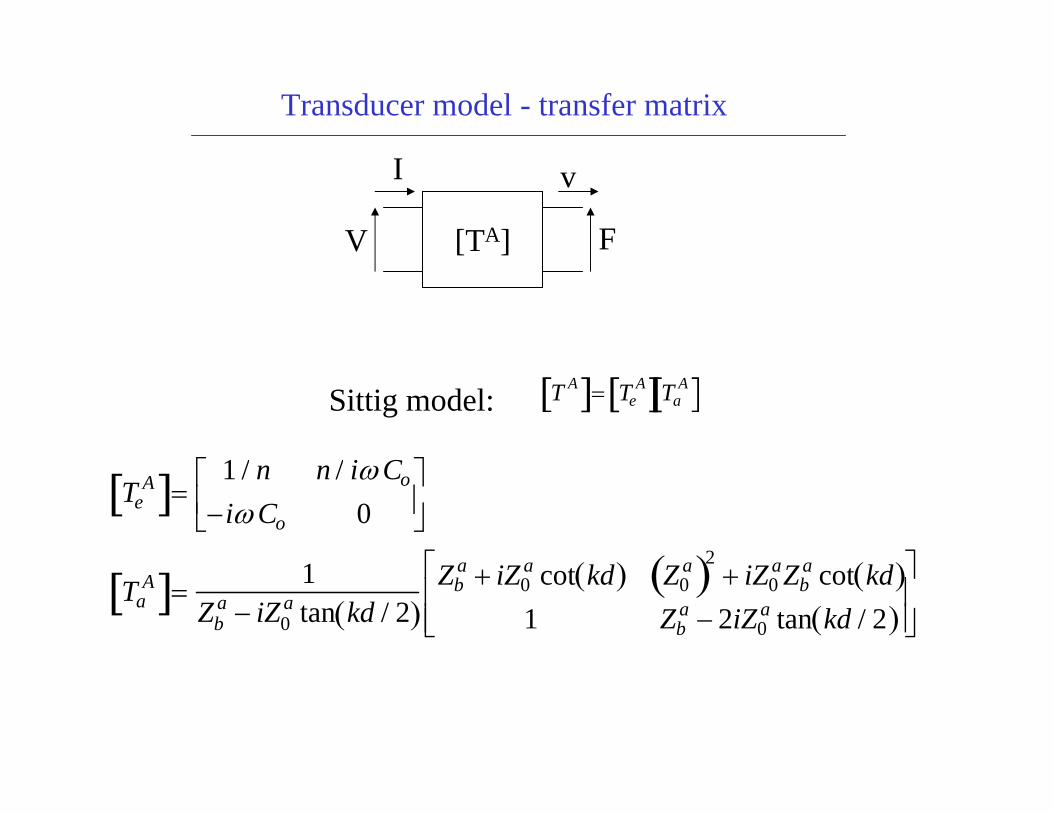
Transducer model - transfer matrix
VI
⎧ ⎨ ⎩
⎫ ⎬ ⎭
=T11
A T12A
T21A T22
A⎡
⎣ ⎢
⎤
⎦ ⎥
Fv
⎧ ⎨ ⎩
⎫ ⎬ ⎭
, det T A[ ]= 1
2-Port Transducer Model
From reciprocity
force
VI
F
v velocityA
I
[TA]V F
v
Transducer model - transfer matrix
Sittig model: T A[ ]= TeA[ ]Ta
A[ ]
TeA[ ]=
1 / n n / iω Co
−iω Co 0⎡
⎣ ⎢ ⎤
⎦ ⎥
TaA[ ]= 1
Zba − iZ0
a tan kd / 2( )Zb
a + iZ0a cot kd( ) Z0
a( )2+ iZ0
aZba cot kd( )
1 Zba − 2iZ0
a tan kd / 2( )
⎡
⎣ ⎢ ⎢
⎤
⎦ ⎥ ⎥
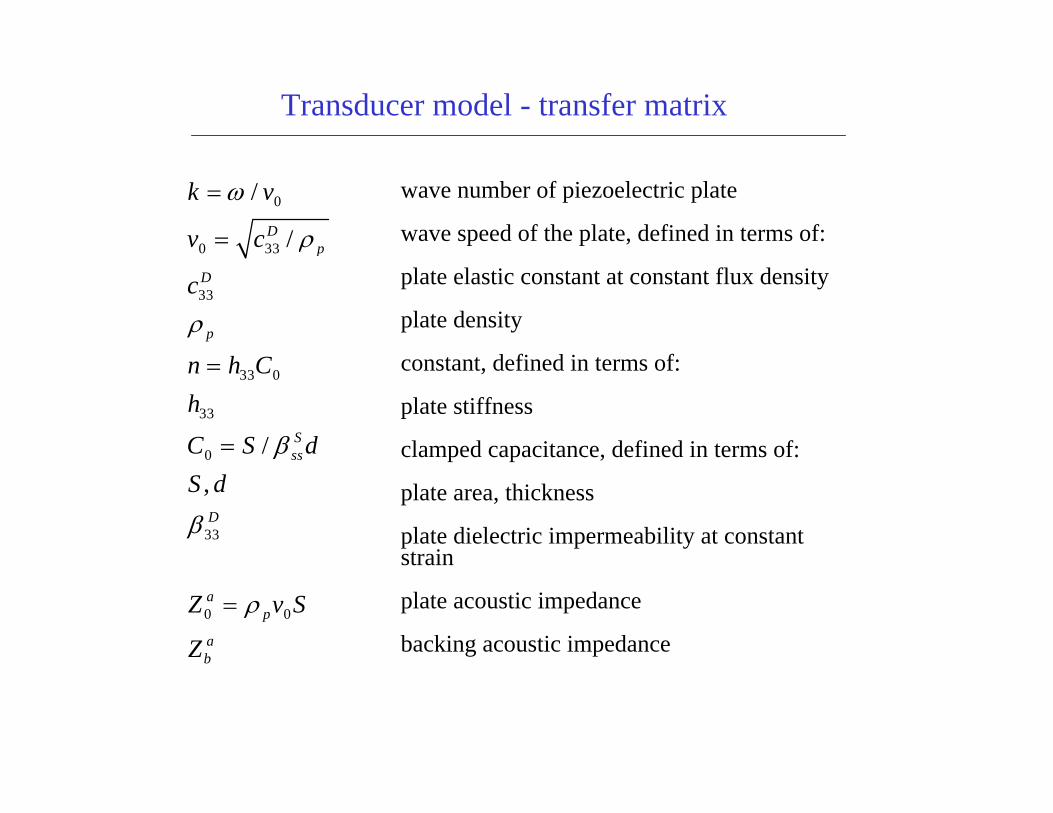
Transducer model - transfer matrix
0
0 33
33
33 0
33
0
33
0 0
/
/
/,
Dp
D
p
Sss
D
ap
ab
k v
v c
c
n h Ch
C S dS d
Z v S
Z
ω
ρ
ρ
β
β
ρ
=
=
=
=
=
wave number of piezoelectric plate
wave speed of the plate, defined in terms of:
plate elastic constant at constant flux density
plate density
constant, defined in terms of:
plate stiffness
clamped capacitance, defined in terms of:
plate area, thickness
plate dielectric impermeability at constant strain
plate acoustic impedance
backing acoustic impedance

Transducer - three port model
IV
F2 , v2F1 , v1
transducer crystalPlating(thickness neglected)
F1
F2
V
⎧ ⎨ ⎪
⎩ ⎪
⎫ ⎬ ⎪
⎭ ⎪ = i
Z0a cot kl( ) Z0
a / sin kl( ) h33 / ωZ0
a / sin kl( ) Z0a cot kl( ) h33 / ω
h33 / ω h33 / ω 1/ ω C0
⎡
⎣
⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥
v1
v2
I
⎧ ⎨ ⎪
⎩ ⎪
⎫ ⎬ ⎪
⎭ ⎪
V I
F2
v2
F1
v1
3x3 impedance matrix

Transducer - Mason equivalent circuit
v1 v2
V
IF1F2
1: n
C0
- C0
iZ0 /sin(kl)a
- iZ0 tan(kl/2)a - iZ0 tan(kl/2)a

Transducer - KLM equivalent circuit model
1 : φ
- i X
C0V
I
F1
v1
F2
v2l/2 l/2
Z0Z0a a
φ =2M sin(kl/2)
1
X = Z0 M2 sin(kl)a
M = h33 / (ωZ0 )a

Sittig model with crystal facing layers
Backing (Zb )a
crystal facing layers(epoxy bonding, wear plate, etc.)
Acoustic layer: F1
v1
F2
v2
[Tl]
Commercial transducer:[TA] = [TA] [TA] [Tl] ...
F1
v1
⎧ ⎨ ⎩
⎫ ⎬ ⎭
=cos kala( ) −iZ0
a sin kala( )−isin kala( ) / Z0
a cos kala( )⎡
⎣ ⎢
⎤
⎦ ⎥
F2
v2
⎧ ⎨ ⎩
⎫ ⎬ ⎭
e a
[TA]V
I
Ft
v
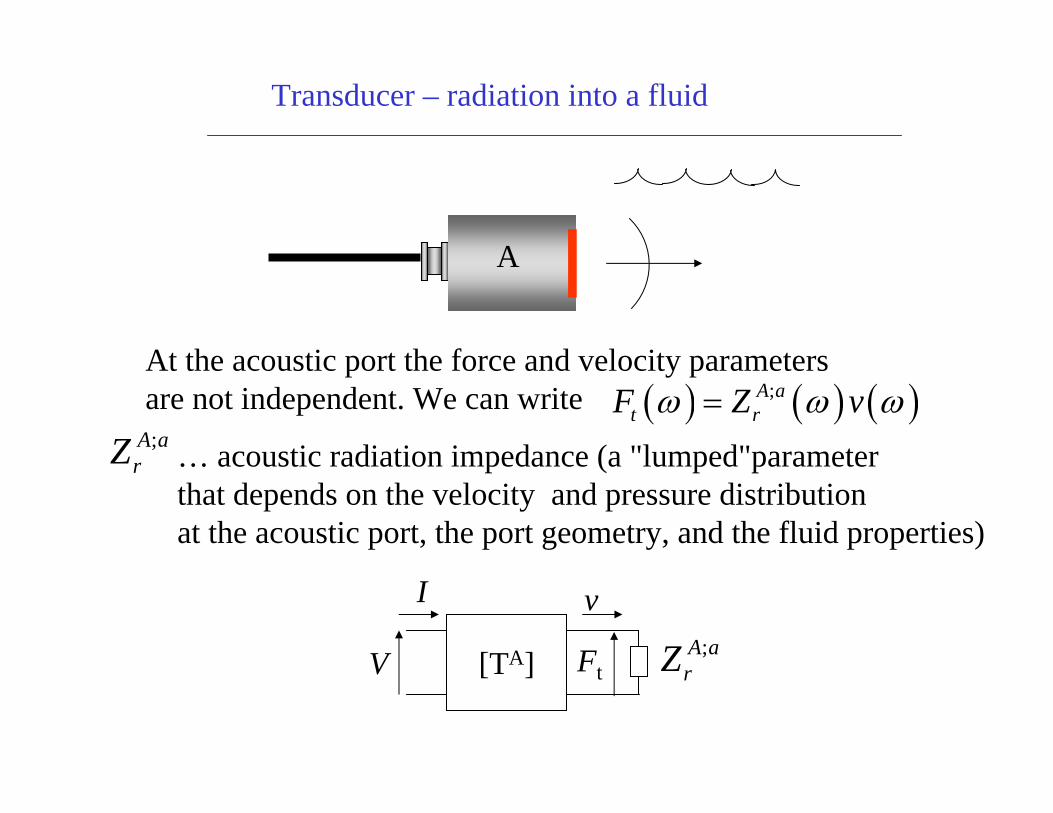
Transducer – radiation into a fluid
At the acoustic port the force and velocity parametersare not independent. We can write ( ) ( ) ( );A a
t rF Z vω ω ω=;A a
rZ … acoustic radiation impedance (a "lumped"parameter that depends on the velocity and pressure distributionat the acoustic port, the port geometry, and the fluid properties)
;A arZ
A

Acoustic radiation impedance
Rayleigh-Sommerfeld integral model of radiation ofwaves into a fluid by a piston transducer
( ) ( ) ( ) ( )exp,
2 S
i v ikrp dS
r
r
ω ρ ωω
π−
=
= −
∫x y
x y
( )( )
( )( ) ( ) ( )
,exp
2a sr
S S
p dSikriZ dS dS
v r
ωωρω
ω π⎧ ⎫−
= = ⎨ ⎬⎩ ⎭
∫∫ ∫
xy x
( )v ω
xyρ… fluid density
c … fluid wave speedk = ω/c
pressure

Greenspan, 1979: showed that for a circular piston transducer of radius a the acoustic radiation impedance obtained from the Rayleigh-Sommerfeld model could be found explicitly in the form
.
J1 … Bessel function
S1 … Struve function
SA = πa2
Acoustic radiation impedance
( ) ( );1 1/ 1 /A a
r AZ cS J ka iS ka kaρ = − −⎡ ⎤⎣ ⎦

Acoustic radiation impedance
>> ka=linspace(0, 25, 100);
>> ka = ka + eps*( ka ==0);
>> Z = 1 -(besselj(1,ka)-i*struve(ka))./ka;
>> plot(ka, abs(Z))
>> xlabel(' ka ')
>> ylabel( ' V/\rhocS')
>> ylabel( ' Z/\rhocS')
0 5 10 15 20 250.5
0.6
0.7
0.8
0.9
1
1.1
1.2
;A ar
A
ZcSρ
ka
Greenspan model of a circular piston transducer
velocity
Fv
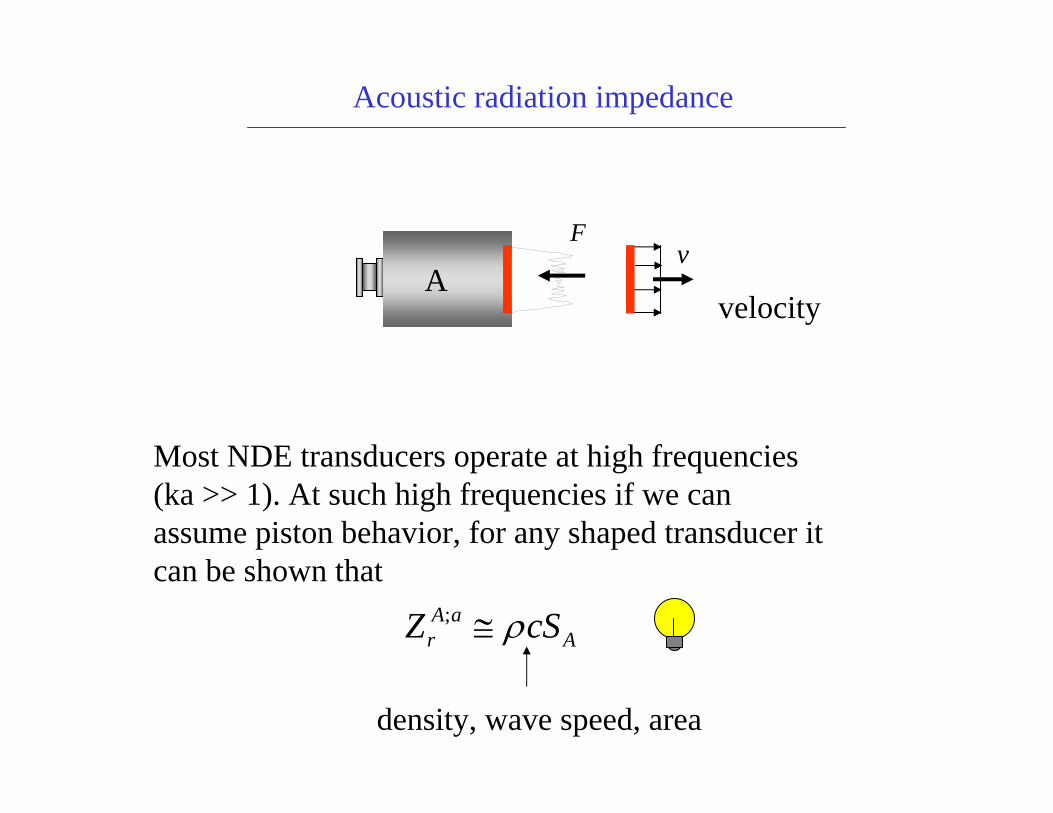
Acoustic radiation impedance
Most NDE transducers operate at high frequencies (ka >> 1). At such high frequencies if we canassume piston behavior, for any shaped transducer it can be shown that
;A ar AZ cSρ≅
density, wave speed, area
A

function y = struve(z)num = length(z);y=zeros(1,num);for k = 1:numy(k) = quadl(@struve_arg, 0, 1, [ ],[ ], z(k));end
function y = struve_arg(x, z)
y = (4./pi).*z.*x.^2.*sin(z.*(1-x.^2)).*sqrt(2-x.^2);
Acoustic radiation impedance
( ) ( )
( )
12 2
10
12 2 2
0
2 1 sin 1
4 sin 1 2
zH z t zt dt t x
z x z x x dx
π
π
= − = −
⎡ ⎤= − −⎣ ⎦
∫
∫
this uses
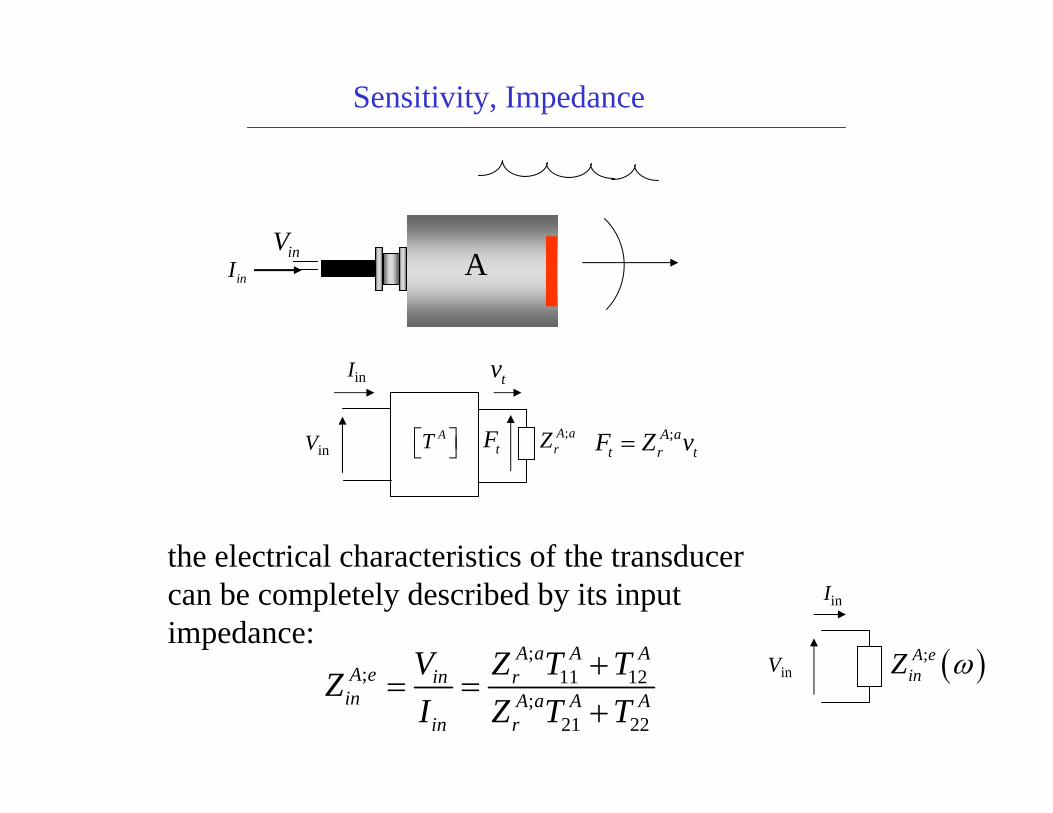
Sensitivity, Impedance
Vin
Iin
;A arZAT⎡ ⎤⎣ ⎦ tF
tv
;A at r tF Z v=
;; 11 12
;21 22
A a A AA e in rin A a A A
in r
V Z T TZI Z T T
+= =
+
inVinI
the electrical characteristics of the transducercan be completely described by its inputimpedance:
Iin
Vin ( );A einZ ω
A

Sensitivity, Impedance
inVinI
The particular sensitivity we will use is:
;21 22
1A tvI A a A A
in r
vSI Z T T
≡ =+
to describe the conversion of electrical signals into acoustic signals, we could use the transducer's sensitivity, SOI, where
tv
tF
OIOSI
=
O … an output (force or velocity)I … an input (voltage or current)
A

Sensitivity, Impedance
;A at r tF Z v=
All the other sensitivities can be found from this sensitivity if the transducer electrical impedance and acoustic radiation impedance are known:
;
;
; ;
/
/
A tvI
in
A A a AtFI r vI
in
A A A etvV vI in
in
A A a A A etFV r vI in
in
vSIFS Z SIvS S ZVFS Z S ZV
=
= =
= =
= =
inVinI
tF
tvA

;A einZ
inI
inV
At vI inv S I=
inVinI
tv
tFA
Sensitivity, Impedance
Thus, we can replace the transfer matrix model of the transducerby a model consisting of an electrical impedance and an ideal "converter" that is defined by the transducer sensitivity:
;A a At r vI inF Z S I=
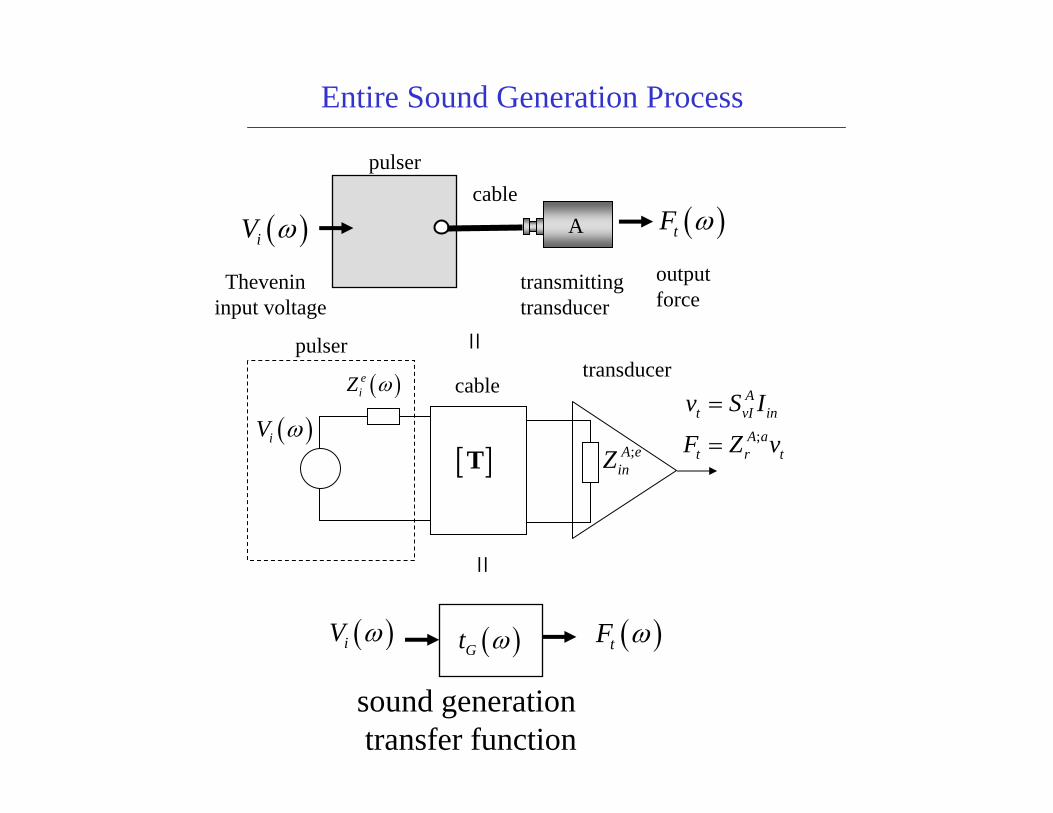
Entire Sound Generation Process
( )tF ω
transmittingtransducer
cablepulser
( )iV ωoutputforce
( )iV ω ( )tF ω( )Gt ω
Thevenininput voltage
A
( )iV ω
( )eiZ ω
[ ]T ;A einZ
;
At vI in
A at r t
v S I
F Z v
=
=
pulser
cabletransducer
sound generationtransfer function
==
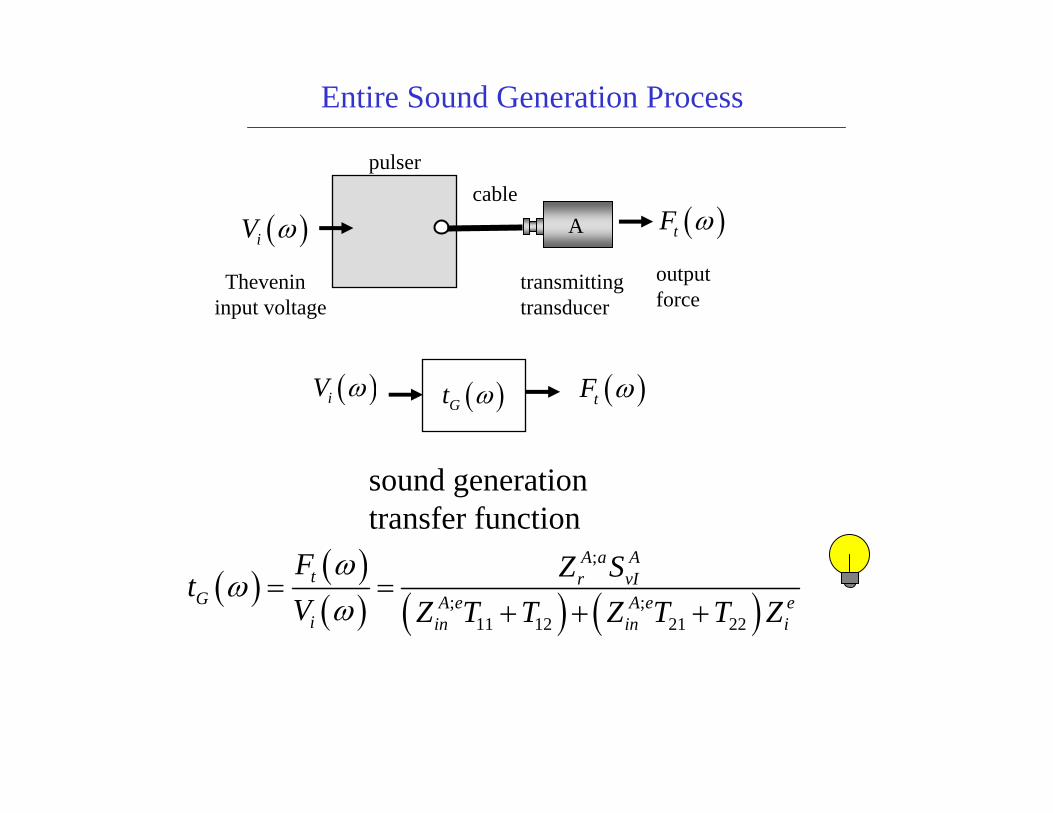
Entire Sound Generation Process
( )tF ω
transmittingtransducer
cablepulser
( )iV ωoutputforce
Thevenininput voltage
A
( )iV ω ( )tF ω( )Gt ω
( ) ( )( ) ( ) ( )
;
; ;11 12 21 22
A a At r vI
G A e A e ei in in i
F Z StV Z T T Z T T Z
ωω
ω= =
+ + +
sound generationtransfer function

References
Ristic, V.M., Principles of Acoustic Devices, John Wiley, 1983
Kino. G.S., Acoustic Waves - Devices, Imaging and Analog Signal Processing, Prentice-Hall, 1987.
Auld, B.A., Acoustic Fields and Waves in Solids, 2nd Ed., Vols. I and II, Krieger Publishing Co. , 1990.
Sacshe, W., and N.N. Hsu,” Ultrasonic transducers for materials testing and their characterization,” in Physical Acoustics, Vol. XIV,Eds. W.P. Mason and R.N. Thurston, 277-406, 1979.
Greeenspan, M., “Piston radiator: some extension of the theory,”J. Acoust. Soc. Am., 65, 608-621, 1979.