transmission codage et traitement du signal (1)
TRANSCRIPT

1
012345678900012344455677789012334567890123456789012345678889011234567889901234

Transmission, Codage et Traitement du Signal
Jean-Pierre Costa
Universite d’Avignon et des pays du Vaucluse
CERI
BP 91228 84911 Avignon

Table des matieres i
Table des matieres
I Etude des signaux continus deterministes 1
1 Notion de signaux et systemes 2
1.1 Introduction a la theorie du signal . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Quelques signaux elementaires . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Exemples de systemes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Energie et puissance 5
2.1 Signaux a energie finie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 Signaux a puissance moyenne finie . . . . . . . . . . . . . . . . . . . . . . . . 5
2.3 Energie d’interaction de 2 signaux . . . . . . . . . . . . . . . . . . . . . . . . 6
2.4 Autocorrelation, intercorrelation, convolution . . . . . . . . . . . . . . . . . . 7
2.4.1 Fonction d’autocorrelation d’un signal . . . . . . . . . . . . . . . . . 7
2.4.2 Proprietes de la fonction d’autocorrelation . . . . . . . . . . . . . . . 8
2.4.3 Fonction d’intercorrelation . . . . . . . . . . . . . . . . . . . . . . . . 9
2.4.4 Produit de convolution . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.5 Exercices : Autocorrelation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3 Representation frequentielle 11
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.1.1 Le signal periodique elementaire . . . . . . . . . . . . . . . . . . . . . 11
3.1.2 Representation frequentielle du signal elementaire . . . . . . . . . . . 13
3.2 Developpement en serie de Fourier . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2.2 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15

ii Table des matieres
3.2.3 Egalite de Parseval . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2.4 Quelques proprietes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3 Proprietes des series de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.3.1 Liens entre les coefficients Sk, ak et bk . . . . . . . . . . . . . . . . . 17
3.4 Exercice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4 Filtrage 19
4.1 Filtrage des signaux a temps continu . . . . . . . . . . . . . . . . . . . . . . 19
4.1.1 Filtre lineaire continu et invariant dans le temps . . . . . . . . . . . . 19
4.1.2 Filtrage frequentiel . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.1.3 Puissance et energie des signaux avant et apres filtrage . . . . . . . . 21
4.1.4 Fenetrage temporel . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.1.5 Analyse blocs–diagrammes . . . . . . . . . . . . . . . . . . . . . . . . 23
4.1.6 Filtre sans distorsion . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.1.7 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.2 Transmission de signaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.2.1 Signaux a bande limitee . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.2.2 Transmission en bande de base . . . . . . . . . . . . . . . . . . . . . 27
4.2.3 Transmission par modulation . . . . . . . . . . . . . . . . . . . . . . 27
4.2.4 Definition d’un filtre de Hilbert . . . . . . . . . . . . . . . . . . . . . 27
4.2.5 Signal analytique associe a un signal reel . . . . . . . . . . . . . . . . 28
4.2.6 Enveloppe complexe des signaux bande etroite . . . . . . . . . . . . . 29
4.2.7 Amplitude et phase instantanees d’un signal bande etroite . . . . . . 30
II Transmission analogique 31
1 Modulation d’amplitude 32
1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
1.2 Modulation a bande laterale double . . . . . . . . . . . . . . . . . . . . . . . 33
1.2.1 Demodulation d’un signal BLD . . . . . . . . . . . . . . . . . . . . . 33
1.3 Modulation d’amplitude ordinaire . . . . . . . . . . . . . . . . . . . . . . . . 33

Table des matieres iii
1.3.1 Demodulation d’un signal AM . . . . . . . . . . . . . . . . . . . . . . 34
1.3.2 Index de modulation . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
1.4 Modulation a bande laterale unique . . . . . . . . . . . . . . . . . . . . . . . 36
1.4.1 Demodulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
1.5 Modulation a bande laterale residuelle . . . . . . . . . . . . . . . . . . . . . 37
1.6 Applications des modulations analogiques . . . . . . . . . . . . . . . . . . . . 37
1.6.1 Subdivisions des bandes de frequences . . . . . . . . . . . . . . . . . 37
1.6.2 Transposition de frequence . . . . . . . . . . . . . . . . . . . . . . . . 38
1.6.3 Multiplexage en frequence . . . . . . . . . . . . . . . . . . . . . . . . 39
1.7 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
1.7.1 Modulation BLD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
1.7.2 Multiplex frequentiel . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
III Transmission d’informations numeriques 43
1 Generalites 44
1.1 Le modele OSI des reseaux de communication . . . . . . . . . . . . . . . . . 44
1.2 Canal de communication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
1.3 Types de transmissions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
1.3.1 Quelques elements d’un systeme de transmission . . . . . . . . . . . . 46
1.3.2 Transfert entre 2 systemes . . . . . . . . . . . . . . . . . . . . . . . . 47
1.3.3 Transmission analogique/numerique . . . . . . . . . . . . . . . . . . . 47
1.4 Les supports physiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
1.4.1 Cables conducteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
1.4.2 Cables a fibre optiques . . . . . . . . . . . . . . . . . . . . . . . . . . 49
1.4.3 Transmissions sans fil . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2 Transmission analogique 51
2.1 Caracteristiques d’un canal . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
2.1.1 Deformation du signal emis . . . . . . . . . . . . . . . . . . . . . . . 51
2.1.2 La bande passante . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52

iv Table des matieres
2.1.3 Quelques definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.2 Transmission numerique par modulation d’une porteuse . . . . . . . . . . . 55
2.2.1 Generalites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
2.2.2 Modulation d’amplitude : A variable . . . . . . . . . . . . . . . . . . 56
2.2.3 Modulation de frequence : f0 variable . . . . . . . . . . . . . . . . . . 57
2.2.4 Modulation amplitude-frequence : A et f0 variables . . . . . . . . . . 58
2.2.5 Modulation de phase : ϕ variable . . . . . . . . . . . . . . . . . . . . 58
2.2.6 Modulations de phase differentielles . . . . . . . . . . . . . . . . . . . 61
2.2.7 Modulation d’amplitude et phase . . . . . . . . . . . . . . . . . . . . 61
2.2.8 Le multiplexage frequentiel . . . . . . . . . . . . . . . . . . . . . . . . 62
3 Transmission numerique en bande de base 63
3.1 La numerisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.1.2 Modulation par impulsions codees (MIC) . . . . . . . . . . . . . . . . 64
3.1.3 Echantillonnage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
3.1.4 les differentes Normes . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.2 Quantification non lineaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
3.2.1 Principe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
3.2.2 Exemple : la parole . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
3.3 Compression-Expansion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
3.3.1 Principe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
3.3.2 Loi µ (Etats Unis – Japon) . . . . . . . . . . . . . . . . . . . . . . . 68
3.3.3 Loi A (Europe) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
3.4 La modulation MIC differentielle DPCM et ADPCM . . . . . . . . . . . . . 69
3.5 Modulation DELTA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
3.5.1 Principe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
3.5.2 Modulateur delta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3.5.3 Demodulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3.5.4 Remarques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3.6 Multiplexage temporel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70

Table des matieres v
3.6.1 Principe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3.6.2 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
3.7 Codage en bande de base : formatage des signaux . . . . . . . . . . . . . . . 72
3.7.1 Code de type non retour a zero (NRZ) . . . . . . . . . . . . . . . . . 72
3.7.2 Code RZ (retour a 0) . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.7.3 Transcodage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.7.4 Codes a deux niveaux et rythme double . . . . . . . . . . . . . . . . 73
3.7.5 Codes de blocs binaires nBmB . . . . . . . . . . . . . . . . . . . . . . 74
3.7.6 Codes a 3 niveaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
3.7.7 Codage a spectre etale . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.7.8 Remarques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.8 Transmission parallele – Transmission serie . . . . . . . . . . . . . . . . . . . 76
IV Application 79
1 Une application : L’ADSL 80
1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
1.1.1 La jeune Histoire d’Internet . . . . . . . . . . . . . . . . . . . . . . . 80
1.2 La connexion a Internet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
1.2.1 Les avantages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
1.2.2 Les inconvenients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
1.2.3 L’evolution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
1.3 Les technologies xDSL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
1.3.1 Deux grandes familles . . . . . . . . . . . . . . . . . . . . . . . . . . 85
1.3.2 Description des differentes technologies . . . . . . . . . . . . . . . . . 86
1.3.3 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
1.4 L’ADSL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
1.4.1 Pourquoi l’ADSL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
1.4.2 Comment ca marche . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
1.4.3 Performances et limites . . . . . . . . . . . . . . . . . . . . . . . . . . 99
1.5 Conclusion ADSL ou Asymetric . . . . . . . . . . . . . . . . . . . . . . . . . 100

vi Table des matieres
V Etude des signaux discrets 101
1 L’echantillonnage 102
1.1 Notion d’echantillonnage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
1.2 Echantillonnage parfait . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
1.2.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
1.2.2 Theoreme d’echantillonnage en bande de base . . . . . . . . . . . . . 104
1.3 Echantillonnage regulier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
1.4 Filtre anti-repliement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
1.5 Interpolation par le bloqueur d’ordre 0 . . . . . . . . . . . . . . . . . . . . . 106
2 Signaux deterministes a temps discret 107
2.1 Signaux a temps discret elementaires . . . . . . . . . . . . . . . . . . . . . . 107
2.2 Proprietes des signaux a temps discret . . . . . . . . . . . . . . . . . . . . . 108
2.3 Transformee de Fourier des signaux a temps discret . . . . . . . . . . . . . . 109
2.3.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
2.3.2 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
2.4 Proprietes de la transformee de Fourier . . . . . . . . . . . . . . . . . . . . . 110
2.5 Transformee de Fourier discrete d’un signal discret . . . . . . . . . . . . . . . 111
2.5.1 Remarques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
2.5.2 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
2.6 Fenetres de ponderation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
2.6.1 Fenetre rectangulaire . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
2.6.2 Fenetre de Hamming . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
2.6.3 Fenetre de Kaiser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
2.6.4 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
2.7 La transformee de Fourier rapide . . . . . . . . . . . . . . . . . . . . . . . . 116
VI Etude des signaux aleatoires 118
1 Rappels sur les probabilites 119
1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119

Table des matieres vii
1.2 Probabilites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
1.2.1 Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
1.2.2 Definitions complementaires . . . . . . . . . . . . . . . . . . . . . . . 120
1.2.3 Algebre des evenements . . . . . . . . . . . . . . . . . . . . . . . . . 120
1.2.4 Probabilite d’un evenement . . . . . . . . . . . . . . . . . . . . . . . 120
1.3 Variables aleatoires reelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
1.3.1 Histogramme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
1.3.2 Fonction de repartition . . . . . . . . . . . . . . . . . . . . . . . . . . 123
1.3.3 Densite de probabilite . . . . . . . . . . . . . . . . . . . . . . . . . . 125
1.4 Lois de repartition particulieres . . . . . . . . . . . . . . . . . . . . . . . . . 127
1.4.1 Loi de Bernouilli x . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
1.4.2 Loi de poisson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
1.4.3 Loi uniforme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
1.4.4 Loi normale ou gaussienne . . . . . . . . . . . . . . . . . . . . . . . . 129
1.5 Moyennes statistiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
1.5.1 Esperance mathematique . . . . . . . . . . . . . . . . . . . . . . . . . 131
1.5.2 Fonction d’une variable aleatoire . . . . . . . . . . . . . . . . . . . . 131
1.5.3 Fonction de deux variables aleatoires . . . . . . . . . . . . . . . . . . 131
1.5.4 Remarques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
1.5.5 Moments et variance . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
1.5.6 Fonction caracteristique . . . . . . . . . . . . . . . . . . . . . . . . . 133
1.6 Moments conjoints et covariance . . . . . . . . . . . . . . . . . . . . . . . . . 133
1.6.1 Repartition conjointe . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
1.6.2 Repartition marginale . . . . . . . . . . . . . . . . . . . . . . . . . . 134
1.6.3 Repartition conditionnelle . . . . . . . . . . . . . . . . . . . . . . . . 135
1.6.4 Variables aleatoires independantes . . . . . . . . . . . . . . . . . . . . 135
1.6.5 Correlation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
1.6.6 Covariance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
1.6.7 Coefficient de correlation . . . . . . . . . . . . . . . . . . . . . . . . . 136
1.6.8 Evenements orthogonaux . . . . . . . . . . . . . . . . . . . . . . . . . 136
1.6.9 Variables conjointement gaussiennes . . . . . . . . . . . . . . . . . . . 137

viii Table des matieres
1.7 Changement de variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
1.7.1 Fonction de variables aleatoires . . . . . . . . . . . . . . . . . . . . . 138
1.7.2 Determination de la densite de probabilite . . . . . . . . . . . . . . . 138
1.7.3 Formule de changement de variables . . . . . . . . . . . . . . . . . . . 138
1.8 Somme d’un grand nombre de variables aleatoires independantes . . . . . . . 140
1.9 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
1.9.1 Variables aleatoires, fonctions de repartition et densites . . . . . . . . 140
1.9.2 Moyennes statistiques . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
2 Signaux aleatoires 142
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
2.2 Les moments temporels, les relations de base . . . . . . . . . . . . . . . . . . 143
2.2.1 Moyenne temporelle . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
2.2.2 Autocorrelation temporelle . . . . . . . . . . . . . . . . . . . . . . . . 143
2.3 Caracteristiques statistiques d’un processus aleatoire . . . . . . . . . . . . . 144
2.3.1 Moyenne statistique . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
2.3.2 Autocorrelation, autocovariance statistiques . . . . . . . . . . . . . . 144
2.4 Stationnarite, Ergodicite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
2.4.1 Stationnarite au sens strict . . . . . . . . . . . . . . . . . . . . . . . . 144
2.4.2 Processus aleatoire stationnaire au second ordre . . . . . . . . . . . . 145
2.4.3 Processus ergodique . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
2.5 Correlation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
2.5.1 Autocorrelation statistique . . . . . . . . . . . . . . . . . . . . . . . . 146
2.5.2 Intercorrelation statistique . . . . . . . . . . . . . . . . . . . . . . . . 146
2.5.3 Autocovariance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
2.5.4 Intercovariance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
2.6 Analyse spectrale des processus aleatoires . . . . . . . . . . . . . . . . . . . . 147
2.6.1 Densite spectrale de puissance . . . . . . . . . . . . . . . . . . . . . . 147
2.6.2 Le bruit blanc b(t) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
2.6.3 Le bruit colore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
2.7 Processus aleatoires particuliers . . . . . . . . . . . . . . . . . . . . . . . . . 148

Table des matieres ix
2.7.1 Sequences independantes et identiquement distribuees (i.i.d.) . . . . . 148
2.7.2 Processus aleatoire gaussien . . . . . . . . . . . . . . . . . . . . . . . 149
2.8 Filtrage des processus aleatoires . . . . . . . . . . . . . . . . . . . . . . . . . 150
2.8.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
2.8.2 Les relations en discret . . . . . . . . . . . . . . . . . . . . . . . . . . 151
2.8.3 Filtre lineaire invariant dans le temps . . . . . . . . . . . . . . . . . . 152
2.9 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
2.9.1 Stationnarite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
2.9.2 Filtrage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
2.9.3 Processus aleatoires particuliers . . . . . . . . . . . . . . . . . . . . . 154
3 Identification parametrique 155
3.1 La transformee en z . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
3.1.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
3.1.2 Transformee en z unilaterale . . . . . . . . . . . . . . . . . . . . . . . 156
3.1.3 Fonction de transfert . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
3.1.4 Systemes definis par une equation aux differences . . . . . . . . . . . 157
3.1.5 Filtres a reponse impulsionnelle finie . . . . . . . . . . . . . . . . . . 158
3.1.6 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
3.1.7 Filtres a reponse impulsionnelle infinie . . . . . . . . . . . . . . . . . 161
3.1.8 Comparaison entre les filtres RIF et RII . . . . . . . . . . . . . . . . 161
3.2 Processus aleatoire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
3.2.1 Processus MA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
3.2.2 Processus AR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
3.2.3 Processus ARMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
3.3 Application a la prediction lineaire . . . . . . . . . . . . . . . . . . . . . . . 165
3.3.1 Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
3.3.2 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
Bibliographie 171

1
Premiere partie
Etude des signaux continus
deterministes
CERI Avignon Traitement du signal J.-P.Costa

2 Chapitre 1. Notion de signaux et systemes
Chapitre 1 Notion de signaux et systemes
1.1 Introduction a la theorie du signal
La theorie du signal a pour objet l’etude des signaux et des systemes qui les transmettent.
L’observation d’un phenomene permet d’extraire certaines quantites qui dependent du temps
(de l’espace, d’une frequence, ou d’une autre variable). Ces quantites, supposees mesurable,
seront appelees des signaux. Elles correspondent, en mathematiques, a la notion de fonction
(d’une ou plusieurs variables : temps, espace, etc.) qui en constitue donc une modelisation.
Dans le cours de traitement du signal nous verrons que la notion de distribution est une
modelisation a la fois plus generale et plus satisfaisante des signaux.
On peut citer quelques exemples de signaux :
– intensite d’un courant electrique,
– position d’un mobile, repere par sa position au cours du temps, M = M(t),
– niveaux de gris des points d’une image g(i,j),
– un son,
– · · ·
Il existe plusieurs types de representations pour les signaux. En effet,
– on peut modeliser un signal de maniere deterministe ou aleatoire.
– Dans le cas ou la variable est continue, le signal est analogique (x = x(t)); dans le cas
ou elle est discrete, le signal est discret (x = (xn)n∈Z). Un signal discret est le plus
souvent le resultat d’une discretisation (echantillonnage) d’un signal analogique.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.2 Quelques signaux elementaires 3
– Les valeurs x = x(t) du signal seront considerees comme des valeurs exactes, reelles
ou complexes.
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01−1.5
−1
−0.5
0
0.5
1
1.5
Signal analogique
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01−1.5
−1
−0.5
0
0.5
1
1.5
Peigne de dirac
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01−1.5
−1
−0.5
0
0.5
1
1.5
Signal echantillonne
Les signaux sont vehicules a travers un systeme de transmission (ou canal de transmission).
D’une maniere generale, on appelle systeme toute entite, permettant de distinguer des
signaux d’entree et des signaux de sortie.
On distingue
– Les systemes analogiques dont les signaux d’entree–sortie sont analogiques.
– Les systemes discrets dont les signaux d’entree–sortie sont discrets.
On passe d’un signal discret a un signal analogique ou inversement, par des convertisseurs :
– convertisseur analogique – numerique, comme par exemple , l’echantillonneur,
– convertisseur numerique – analogique qui recompose un signal analogique a partir d’un
signal numerique. Par exemple le bloqueur, qui conserve la derniere valeur du signal
jusqu’a l’obtention de la valeur suivante.
1.2 Quelques signaux elementaires
1. Echelon unite (Heaviside) : on le note u(t) et il est defini par
Ce signal modelise l’etablissement instantane d’un regime constant.
2. La fonction porte, notee Πθ(t) est definie par
CERI Avignon Traitement du signal J.-P.Costa

4 Chapitre 1. Notion de signaux et systemes
u(t) =
{0 si t < 01 si t ≥ 0
−5 0 5 10 15 20 25 30−1
−0.5
0
0.5
1
1.5
2
2.5
3
u(t) u(t)
t
Πθ(t) =
{1 si |t| < θ0 si |t| > θ
θ > 0 donne
−30 −20 −10 0 10 20 30−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
3
−θ θ
Πθ(t)
t
3. Signal sinusoıdal pur : c’est un signal de la forme
x(t) = A cos(ωt+ ϕ)
ou A est l’amplitude du signal, ω la pulsation et ϕ la phase initiale.
1.3 Exemples de systemes
1. L’amplificateur ideal : y(t) = k x(t) avec k une constante fixee.
2. Ligne a retard y(t) = x(t− a) avec k une constante reelle.
3. Circuit RC Ce systeme est regit par une equation differentielle lineaire du premier
ordre a coefficients constants.
e(t) = s(t) +RC s′(t)
La fonction de transfertS(p)
E(p)=
1
1 +RC P
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

5
Chapitre 2 Energie et puissance
2.1 Signaux a energie finie
Lorsqu’on etudie les proprietes des signaux, il est important d’etudier l’energie d’un signal.
Par definition, l’energie E (exprimee en Joules) d’un signal a temps continu s(t) est
E =
∫ +∞
−∞|s(t)|2 dt
E =
∫ +∞
−∞s(t)s∗(t) dt
Si cette integrale est finie on parle de signaux a energie finie. La quantite p(t) = s(t)s∗(t)
s’appelle la puissance instantanee. Les signaux de duree limitee sont a energie finie.
2.2 Signaux a puissance moyenne finie
On definit, si elle existe, la puissance moyenne par
p = limτ→∞
1
τ
∫ +τ/2
−τ/2s(t)s∗(t) dt
Si cette limite est finie, on parle de signaux a puissance moyenne finie. Dans le cas des
signaux periodiques de periode T0, la puissance moyenne du signal correspond a la puissance
CERI Avignon Traitement du signal J.-P.Costa

6 Chapitre 2. Energie et puissance
moyenne sur une periode du signal.
p =1
T0
∫ +T0/2
−T0/2s(t)s∗(t) dt
p s’exprime en Watts (Joules par seconde).
Remarques:
– un signal d’energie finie (E <∞) a une puissance moyenne nulle,
– un signal d’energie E = 0 est considere comme egal a 0 (signal nul),
– 2 signaux x(t) et y(t) sont egaux si l’energie de leur difference est nulle∫ +∞−∞ |x(t) −
y(t)|2 dt = 0
Tous les signaux physiques sont a energie finie mais on les modelise mathematiquement
comme des signaux eternels dont on observe une certaine duree.
Signaux nuls E = 0
Signaux a energie finieE <∞P = 0
signaux de module fini et de support borne
Signaux a puissance moyenne finieE =∞P <∞
signaux periodiques
Autres signauxE =∞P =∞
s(t) = t, bruit blanc, dirac
2.3 Energie d’interaction de 2 signaux
Prenons comme exemple 2 sources ponctuelles S1 et S2 produisant en un point de l’espace
une onde de pression s1(t) et s2(t). Lorsque ces 2 sources agissent simultanement, l’onde de
pression en ce point est s(t) = s1(t) + s2(t). Si on veut calculer l’energie de s(t), on obtient
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

2.4 Autocorrelation, intercorrelation, convolution 7
alors :
E =
∫ +∞
−∞s(t)s∗(t) dt
=
∫ +∞
−∞s1(t)s
∗1(t) dt+
∫ +∞
−∞s2(t)s
∗2(t) dt+∫ +∞
−∞s1(t)s
∗2(t) dt+
∫ +∞
−∞s2(t)s
∗1(t) dt
E = E1 + E2 + E12 + E21
On a l’energie de chacune des 2 ondes plus des termes croises relatifs a l’interaction des 2
signaux.
On definit donc
– la puissance instantanee d’interaction de 2 signaux par:
Pxy(t) = x(t)y∗(t)
On remarque que Pyx(t) = P ∗xy(t),
– l’energie d’interaction de 2 signaux
Exy =
∫ +∞
−∞x(t)y∗(t) dt
avec |Exy|2 ≤ ExEy
2.4 Autocorrelation, intercorrelation, convolution
2.4.1 Fonction d’autocorrelation d’un signal
– a energie finie
Css(τ) =
∫ +∞
−∞s(t)s∗(t− τ) dt
CERI Avignon Traitement du signal J.-P.Costa

8 Chapitre 2. Energie et puissance
0 0.02 0.04 0.06
−1
−0.5
0
0.5
1
Signal utile x(t)
0 0.02 0.04 0.06−4
−2
0
2
4Signal bruité y(t), RSB=−7dB
0 0.02 0.04 0.06−100
−50
0
50
100Cxx(τ)
τ
0 0.02 0.04 0.06−100
−50
0
50
100
150
200
Cyy(τ)
τ
Autocorrelation d’une sinusoıde et d’une sinusoıde bruitee
– a puissance moyenne finie
Css(τ) = limT→∞
1
T
∫ +T/2
−T/2s(t)s∗(t− τ) dt
– periodique
Css(τ) =1
T0
∫ +T0/2
−T0/2s(t)s∗(t− τ) dt
La fonction d’autocorrelation traduit la similitude d’un signal au niveau de la forme en
fonction d’un decalage temporel. C’est une mesure de la ressemblance du signal avec lui
meme au cours du temps. Dans le cas d’un signal periodique, la fonction d’autocorrelation
le sera aussi et permettra de detecter cette periodicite.
2.4.2 Proprietes de la fonction d’autocorrelation
– Css(0) = Es ≥ 0 : l’autocorrelation est maximum en 0 et correspond a l’energie du
signal.
– Dans le cas ou s(t) est un signal reel, la fonction d’autocorrelation est paire Css(τ) =
Css(−τ).
– Dans le cas ou s(t) est un signal complexe, la fonction d’autocorrelation est a symetrie
hermitienne Css(τ) = C∗ss(−τ).
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

2.4 Autocorrelation, intercorrelation, convolution 9
0 0.05 0.1 0.15−4
−2
0
2
4
Signal émis
temps (t)0 0.05 0.1 0.15
−10
−5
0
5
10Signal recu
temps (t)
−0.15 −0.1 −0.05 0 0.05 0.1 0.15
−200
−100
0
100
200
300
400Intercorrélation Cxy(τ)
τ
Exemple d’une impulsion radar
2.4.3 Fonction d’intercorrelation
– a energie finie
Cxy(τ) =
∫ +∞
−∞x(t)y∗(t− τ) dt
– a puissance moyenne finie
Cxy(τ) = limT→∞
1
T
∫ +T/2
−T/2x(t)y∗(t− τ) dt
Puisque Cxy(τ) est une mesure de similitude, elle atteint son maximum pour une valeur de
τ lorsque la similitude est la plus grande.
2.4.4 Produit de convolution
Le produit de convolution est un outil tres pratique pour le calcul de la reponse d’un
systeme lineaire et invariant dans le temps. En effet la reponse y(t) d’un tel systeme a une
entree quelconque x(t) s’exprime comme le produit de convolution de x(t) avec la reponse
impulsionnelle h(t) du systeme, c’est a dire :
y(t) = x(t) ∗ h(t) = h(t) ∗ x(t) =
∫ +∞
−∞h(u)x(t− u) du =
∫ +∞
−∞x(u)h(t− u) du
CERI Avignon Traitement du signal J.-P.Costa

10 Chapitre 2. Energie et puissance
2.5 Exercices : Autocorrelation
Soit la fonction x(t) = S0 e−iω0t
1. Montrer que cette fonction est periodique de periode T0 (x(t+ T0) = x(t)).
2. Calculer la fonction d’autocorrelation Cxx(τ).
3. Verifier les proprietes de la fonction d’autocorrelation suivantes :
(a) Cxx(0) =Puissance moyenne,
(b) Cxx(τ) = C∗xx(−τ) : symetrie hermitienne,
(c) |Cxx| ≤ Cxx(0) : la fonction est maximum en 0,
(d) comme x(t) est periodique alors Cxx(τ) est periodique.
Soit la fonction x(t) = S0 e−αt u(t)
avec α > 0 et u(t) = 1 pour t ≥ 0 et 0 ailleurs
1. Representer sur le meme graphe l’allure de x(t) et de x(t− t0).
2. Montrer que la fonction d’autocorrelation Cxx(τ) est
Cxx(τ) =S20
2αe−ατ
3. Verifier les proprietes de la fonction d’autocorrelation (3a), (3b), (3c)
4. Memes questions pour la fonction porte Πθ(t).
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

11
Chapitre 3 Representation frequentielle
3.1 Introduction
3.1.1 Le signal periodique elementaire
Jusqu’a present tous les signaux etudies etaient de types analogiques et ils etaient representes
comme des grandeurs en fonctions du temps. Le signal periodique analogique elementaire
correspond au signal de type sinusoıdal d’equation :
x(t) = A sin(ω0 t+ ϕ) (3.1)
avec A l’amplitude du signal, ω = 2πf0 la pulsation, f0 la frequence du signal et ϕ la phase
a l’origine.
CERI Avignon Traitement du signal J.-P.Costa

12 Chapitre 3. Representation frequentielle
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02−10
−8
−6
−4
−2
0
2
4
6
8
10
Sinusoide de fréquence f0=150 Hz
Temps
Am
pli
tud
e
Fig. 3.1 – Representation temporelle.
Dans la realite les signaux etudies (signaux de parole, bruits, . . .), sont plus complexe (figure
3.2).
0 0.2 0.4 0.6 0.8 1 1.2 1.4−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Temps
Am
pli
tud
e
Fig. 3.2 – Signal reel.
Il faut donc proposer une nouvelle representation permettant de caracteriser ces signaux. En
effet, la representation temporelle ne permet pas a elle seule de caracteriser totalement ces
signaux. La representation utilisee dans ce cas est appelee ”la representation frequentielle”, le
but etant de transformer le signal temporel en un signal faisant intervenir des frequences. La
transformation permettant de realiser le passage d’un signal temporel en un signal frequentiel
est appelee la Transformee de Fourier (TF).
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

3.1 Introduction 13
3.1.2 Representation frequentielle du signal elementaire
L’equation de l’onde elementaire (Eq. 3.1) montre que x(t) contient une seule et unique
frequence f0. La representation en frequence de ce signal est donc la plus simple possible, cf
figure 3.3.
0 500 1000 1500 2000 2500 3000 3500 40000
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Fréquences
Am
plitu
de
Fig. 3.3 – Representation frequentielle du signal elementaire
Comme les signaux que l’on va etudier sont plus complexes que l’onde elementaire, ils
vont donc avoir une representation en frequence plus complexe, c’est a dire avoir plusieurs
composantes en frequences, comme la montre la figure 3.4.
Temps
Fre
qu
en
ce
s
Fig. 3.4 – Representation Temps–Frequence du signal reel.
Le raisonnement utilise par la TF est d’exprimer les signaux reels comme une somme infinie
de signaux elementaires, ou chacun d’eux est ponderes par un coefficient. L’utilisation de
CERI Avignon Traitement du signal J.-P.Costa

14 Chapitre 3. Representation frequentielle
cette approche permet d’obtenir toutes les representations frequentielles possibles.
Avant d’etudier la transformee de Fourier il est important d’introduire celle-ci par l’etude
du developpement en serie de Fourier des signaux periodiques.
3.2 Developpement en serie de Fourier
3.2.1 Definition
L’idee de base d’un developpement en serie de Fourier est qu’un signal periodique peut etre
decompose en une somme de signaux harmoniques, c’est a dire de signaux dont la frequence
est multiple d’une frequence fondamentale.
Soit s(t) une fonction continue, periodique (T0). On peut decomposer ce signal en une somme
infinie d’exponentielles complexes de frequence multiple de f0 = 1/T0, de sorte que
s(t) =+∞∑
k=−∞
Skej2πk t
T0
Sk =1
T0
∫ +T0/2
−T0/2s(t)e
−2πk tT0 dt
ou les Sk representent les coefficients de Fourier. La suite des coefficients complexes Sk
constitue le spectre de raies discret du signal periodique s(t).
On peut egalement decomposer s(t) suivant :
s(t) = a0 ++∞∑k=1
ak cos(k2πt
T0) + bk sin(k2π
t
T0)
avec a0 correspondant a la valeur moyenne du signal sur une periode
a0 =1
T0
∫ +T0/2
−T0/2s(t) dt
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

3.2 Developpement en serie de Fourier 15
et
ak =2
T0
∫ +T0/2
−T0/2s(t) cos(k2π
t
T0) dt
bk =2
T0
∫ +T0/2
−T0/2s(t) sin(k2π
t
T0) dt
3.2.2 Exemple
Soit le signal periodique (T = 2π) suivant (cf fig 3.5):
f(t) =
1 si 0 ≤ |t| < π
−1 si π ≤ |t| < 2π
Calcul des coefficients ak et bk,
ak = 0 pour tout k
bk =2
kπ(1− (−1)k+1)
soit s(t) =+∞∑k=1
bk sin(kt)
avec bk = 0 pour les k pairs.
3.2.3 Egalite de Parseval
L’energie d’un signal periodique P est egale a la somme des energies de ses harmoniques.
P =1
T0
∫ +T0/2
−T0/2|s(t)|2dt =
+∞∑k=−∞
|Sk|2 = |a0|2 +1
2
+∞∑k=1
(|ak|2 + |bk|2))
ou chaque terme |Sk|2 represente la puissance moyenne apportee par la composante ej2πkt/T0
CERI Avignon Traitement du signal J.-P.Costa

16 Chapitre 3. Representation frequentielle
0 0.005 0.01 0.015 0.02
−4
−2
0
2
4
0 0.005 0.01 0.015 0.02
−4
−2
0
2
4
0 0.005 0.01 0.015 0.02
−4
−2
0
2
4
0 0.005 0.01 0.015 0.02
−4
−2
0
2
4
Signal Signal + S1
Signal + S3 Signal + S
5
Fig. 3.5 – Signal reconstruit
3.2.4 Quelques proprietes
On a vu que la composante a0 = S0 de s(t) est appelee composante continue. C’est la valeur
moyenne de s(t) sur une periode.
La frequence f0 = 1T0
est la frequence fondamentale et les composantes a1 et b1 constituent
l’amplitude du fondamental. Les frequences fk = k/T0 pour k > 1 constituent les harmoniques
d’ordre k (1er harmonique f2 = 2/T0 fois le fondamental).
De plus,
– Si s(t) est paire alors bk = 0 ∀ k.
– Si s(t) est impaire alors ak = 0 ∀ k.
– Si s(t) est reelle, ak, bk sont reels et Sk = S∗k .
– Si s(t) est complexe, ak, bk sont complexes.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

3.3 Proprietes des series de Fourier 17
3.3 Proprietes des series de Fourier
3.3.1 Liens entre les coefficients Sk, ak et bk
Pour k > 0,
S0 = a0 a0 = S0
Sk = 12(ak − j bk) ak = Sk + S−k
S−k = 12(ak + j bk) bk = j(Sk − S−k)
3.4 Exercice
Calcul des coefficients de la serie de Fourier du signal periodique s(t) de periode T0 = 3π2
sK(t) = a0 +K∑k=1
ak cos(k2π
T0t) + bk sin(k
2π
T0t)
– La valeur moyenne sur une periode est de : a0 = 23π
[∫ π/20
dt+∫ 3π/2
πdt]
= 23
– coefficients ak
ak =2
T0
[∫ π/2
0
cos(2πkt
T0) dt+
∫ 3π/2
π
cos(2πkt
T0) dt
]
ak =1
πk
[sin(2πk
π
2
2
3π) + sin(2πk
3π
2
2
3π)− sin(2πkπ
2
3π)
]=
2
kπsin(2πk/3)
CERI Avignon Traitement du signal J.-P.Costa

18 Chapitre 3. Representation frequentielle
0 2 4 6 8 10 12 14 16 18 20−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Coeficients ak
k
0 2 4 6−0.2
0
0.2
0.4
0.6
0.8
1
Signal original
0 2 4 6−0.2
0
0.2
0.4
0.6
0.8
1
Signal reconstruit K=20
0 2 4 6−0.2
0
0.2
0.4
0.6
0.8
1
Signal reconstruit K=50
temps (t)0 2 4 6
−0.2
0
0.2
0.4
0.6
0.8
1
Signal reconstruit K=100
temps (t)
Reconstruction du signal original
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

19
Chapitre 4 Filtrage
4.1 Filtrage des signaux a temps continu
4.1.1 Filtre lineaire continu et invariant dans le temps
Un systeme est dit lineaire si pour les entrees x1(t) et x2(t) respectivement on obtient les
sorties y1(t) et y2(t) alors pour l’entree a1 x1(t) + a2 x2(t) on obtient a1 y1(t) + a2 y2(t) avec
a1, a2 ∈ C.
Un systeme est dit invariant dans le temps si son comportement se reproduit de facon
identique au cours du temps. Si pour une entree x(t) on a une sortie y(t), alors pour x(t−τ)
on a y(t− τ).
Un systeme est dit instantane ou sans memoire si la relation entree–sortie est du type
y(t) = g[x(t)].
Un systeme est dit stable si la reponse a toute entre bornee est elle meme bornee.
Un systeme est continu ssi
CERI Avignon Traitement du signal J.-P.Costa

20 Chapitre 4. Filtrage
limn→∞ xn(t) = x(t) yn(t) = h(t) ∗ xn(t)
avec
limn→∞ yn(t) = y(t) y(t) = h(t) ∗ x(t)
ou H(p) (tranformee de Laplace) est la fonction de transfert du systeme.
On appelle filtre un systeme lineaire continu et invariant dans le temps.
4.1.2 Filtrage frequentiel
On appelle filtrage frequentiel, l’operation consistant a prelever, supprimer, ou seulement
attenuer tout ou une partie des composantes frequentielles d’un signal.
Par definition y(t) = h(t) ∗ x(t),
– H(f) s’appelle la reponse en frequences du filtre
– |H(f)| s’appelle le gain en frequences du filtre
– Arg(H(f)) s’appelle la phase du filtre.
La relation fondamentale des filtres est donnee par,
Y (f) = H(f)X(f) avec
X(f) = TF [x(t)]
X(f) = TF [x(t)]
on appelle h(t) = TF−1[H(f)] la reponse impulsionnelle du filtre. En effet, par TF inverse
y(t) = x(t) ∗ h(t) =
∫ +∞
−∞h(t′)x(t− t′) dt′
dans le cas ou x(t) = δ(t), y(t) = h(t) ∗ δ(t) = h(t), d’ou le nom de reponse impulsionnelle
pour h(t). h(t) ne peut pas commencer avant 0 c’est a dire preceder la cause. Un filtre est
realisable si sa reponse impulsionnelle h(t) est causale (h(t) = 0 pour t < 0) et s’il est stable.
On rappelle qu’un filtre est stable ssi a toute entree bornee correspond une sortie bornee,∫ +∞−∞ |h(t)| dt <∞.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

4.1 Filtrage des signaux a temps continu 21
4.1.3 Puissance et energie des signaux avant et apres filtrage
Filtrer un signal revient aussi a lui prelever une partie de son energie. Il est important de
considerer la puissance et l’energie des signaux avant et apres filtrage dans le temps et en
frequence.
Y (f) = H(f)X(f)
|Y (f)|2 = |H(f)|2 |X(f)|2
Or on a vu que |X(f)|2 = Γxx(f) correspond a la densite spectrale d’energie (signaux a
energie finie), d’ou :
Γyy(f) = |H(f)|2Γxx(f)
par TF inverse on montre que :
Cyy(τ) = Chh(τ) ∗ Cxx(τ)
avec Chh(τ) =∫ +∞−∞ h(t)h∗(t− τ) dt.
– Si x(t) est a energie finie, Γxx(f) est la densite spectrale d’energie,
Cxx(τ) =∫ +∞−∞ x(t)x∗(t− τ) dt =
∫ +∞
−∞Γxx(f)ej2πfτ df
Cxx(0) =∫ +∞−∞ x(t)x∗(t) dt =
∫ +∞
−∞Γxx(f) df = Ex
– Si x(t) est a puissance moyenne finie, Γxx(f) est la densite spectrale de puissance,
Cxx(τ) = limT→∞
1
T
∫ +T/2
−T/2x(t)x∗(t− τ) dt
Cxx(0) = limT→∞
1
T
∫ +T/2
−T/2x(t)x∗(t) dt = Px =
∫ +∞
−∞Γxx(f) df
– Si x(t) est un signal periodique de periode T0, Γxx(f) est la densite spectrale de
CERI Avignon Traitement du signal J.-P.Costa

22 Chapitre 4. Filtrage
puissance, et Cxx(τ) est de periode T0.
Γxx(f) = TF [Cxx(τ)] =+∞∑
k=−∞
|Xk|2 δ(f −k
T0)
De meme que le spectre X(f) d’un signal preriodique est une suite infinie de diracs de
poids Xk complexes, la densite spectrale de puissance est une suite infinie de diracs
de poids reels |Xk|2.
X(f) =+∞∑
k=−∞
Xk δ(f −k
T0)
4.1.4 Fenetrage temporel
On appelle fenetrage temporel, le fait de multiplier un signal de dure infinie par une fenetre
pour obtenir un signal a duree finie correspondant a un signal physique.
La fenetre la plus simple est la fenetre rectangulaire mais il en existe bien d’autres. L’effet
de cette fenetre temporelle sur le signal et sur son spectre est tres important. En effet, si
par exemple on a le signal temporel suivant :
x(t) = cos(2πf0t)
Si on lui applique une fenetre du type w(t) = Πτ/2(t) alors,
y(t) = x(t)w(t)
Y (f) = X(f) ∗W (f)
Le fenetrage en temps correspond a une convolution des spectres en frequence,
Y (f) =τ
2sinc[(f − f0)τ ] + τsinc[(f + f0)τ ]
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

4.1 Filtrage des signaux a temps continu 23
4.1.5 Analyse blocs–diagrammes
Tres souvent un systeme general est decompose en sous systemes, series, paralleles ou
boucles. Si chaque sous systeme est equivalent a un filtre, alors il a une fonction de transfert
frequentielle. Chaque fonction de transfert individuelle doit tenir compte des autres sous
systemes, ou bien etre isolee des blocs suivants.
Fonctions elementaires que l’on peut trouver :
– Multiplication par un scalaire (fonction gain)
y(t) = K x(t) −→ H(f) = K
– Derivation
y(t) =d x(t)
dt−→ H(f) = j2πf
– Integration
y(t) =
∫ t
−∞x(u) du −→ H(f) =
1
j2πf
– Retard pur
y(t) = x(t− t0) −→ H(f) = e−j2πft0
4.1.6 Filtre sans distorsion
On a vu qu’un filtre (systeme lineaire continu, invariant dans le temps) modifiait l’amplitude
et la phase des composantes sinusoidales du singal d’entree. En filtrage de signal, ceci peut
etre voulu lorsque par exemple, on cherche a eliminer certaines frequences.
En transmission de signal au contraire on souhaite transmettre un signal d’un point a un
autre, sans distorsion. On suppose que le canal de transmission peut etre modelise idealement
par un systeme lineaire invariant dans le temps (cest a dire un filtre). On definit le filtre
sans distorsion, commme un filtre qui apporte un gain K et un retard t0 au signal d’entree
CERI Avignon Traitement du signal J.-P.Costa

24 Chapitre 4. Filtrage
x(t),
y(t) = K x(t− t0)
Y (f) = K e−j2πft0X(f)
H(f) = K e−j2πft0
Le gain du filtre est K et la phase est Arg(H(f) = −2πft0.
Pour realiser un filtre sans distorsion il faut un gain constant ∀ f et une phase egale a une
fonction negative de la frequence. Ceci est irrealisable physiquement car h(t) est un dirac.
En fait dans la pratique on souhaite ces deux conditions seulement pour les frequences ou
le signal dentree a un contenu spectral. On dit que la bande passante du filtre doit contenir
les supports frequentiels des signaux a l’entree du filtre.
Remarque : l’oreille humaine est sensible a la distorsion de phase.
4.1.7 Exercices
- Soit le signal periodique s(t) defini par s(t) = A cos(2πf0t+ φ0)
1. Donner la fonction d’autocorrelation Css(τ) et la densite spectrale de puissance de
s(t).
2. Soit la sortie du filtre h(t) definie par y(t) = h(t) ∗ x(t) = x(t)− x(t− T )
(a) Quel est le signal de sortie si le signal d’entree x(t) est un dirac δ(t).
(b) Calculer la reponse en frequence du filtre H(f).
(c) Calculer |H(f)|2 et en deduire Chh(τ).
3. On considere maintenant que l’entree x(t) = s(t).
(a) Calculer la fonction d’autocorrelation Cyy(τ) de y(t).
(b) En deduire la puissance moyenne du signal de sortie.
(c) Calculer la densite spectrale du signal de sortie y(t).
(d) En deduire la puissance moyenne du signal de sortie, par Py =∫ +∞−∞ Γyy(f) df
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

4.1 Filtrage des signaux a temps continu 25
- Soit le signal x0(t) definit par
x0(t) =
A pour 0 ≤ t ≤ θ
−A pour θ ≤ t ≤ 2θ
0 ailleurs
avec θ = 2 s et A = 1V .
1. Dessiner ce signal.
2. Donner l’energie de ce signal.
3. Calculer et tracer la fonction d’autocorrelation de x0(t), Cx0x0(τ).
- Soit un signal x(t) reel non nul pour 0 < t < t1 et de fonction d’autocorrelation Cxx(τ).
Soit y(t) la sortie d’un filtre lineaire de reponse impulsionnelle h(t). On dit qu’un filtre est
adapte au signal x(t) si h(t) = x(t1 − t).
1. Calculer dans ce cas y(t) et l’exprimer en fonction de Cxx(τ).
2. Pour quelle valeur de t, la sortie y(t) est-il maximal? On utilisera une propriete des
fonctions d’autocorrelation.
- Soit le signal v(t) =∑+∞
n=−∞Πθ/2(t− nT )
1. Tracer ce signal.
2. Calculer la transformee de Fourier V (f) de ce signal
-Soit le signal y(t) = Av(t)x(t) avec x(t) = cos(2πf0t)
1. Tracer ce signal.
CERI Avignon Traitement du signal J.-P.Costa

26 Chapitre 4. Filtrage
2. Calculer la transformee de Fourier de ce signal en utilisant la convolution de V (f) et
X(f).
4.2 Transmission de signaux
4.2.1 Signaux a bande limitee
On a jusqu’a present consideree des signaux d’etendue spectrale infinie et utilise des modeles
mathematiques, mais ces signaux ne sont pas physiques.
Considerons un signal s(t) a transmettre dont le spectre, calcule par la TF est S(f). Pour
un signal physique reel on definit une frequence min fm et une frequence max fM telles
qu’on considere que le spectre S(f) est negligeable ou nul au dela : ceci forme le support
spectral. Par exemple en telephonie on considere que fm = 300 Hz et fM=3400 Hz, alors
qu’en haute fidelite fm = 20 Hz et fM=20000 Hz.
La transmission de ce signal s’effectue sur un canal de transmission necessairement imparfait
et qui laisse passer certaines frequences et pas d’autres. On parle de bande passante du canal
de transmission. Le canal de transmission peut etre un cable metallique, une fibre optique
ou encore le milieu aerien (ondes hertziennes).
signal passe-bas
Le signal a pour support [−B, B] avec fm = 0 et fM = B. Ce signal est aussi appele signal
en bande de base ou signal basse frequence.
signal passe bande
Un signal reel est passe bande si le support de sa TF est borne et ne contient pas la frequence
0. On peut trouver une frequence fp appelee frequence porteuse et une frequence B appelee
demi largeur de bande qui contiennent fm = f0−B et fM = f0 +B. Si f0 � B on parle de
signaux bande etroite.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

4.2 Transmission de signaux 27
Le support spectral du signal s(t) doit etre compris dans la bande passante du canal de
transmission. Il y a deux types de transmission :
1. la transmission en bande de base,
2. la transmission par modulation.
4.2.2 Transmission en bande de base
On ne fait rien, les signaux sont transmis dans leur support spectral original qui est adapte
a la bande passante du canal.
4.2.3 Transmission par modulation
On transpose la support spectral des signaux dans la bande passante du canal de transmission.
Ceci se fait par modulation. Si on appelle yp(t) = A cos(2πfpt+φp) l’onde porteuse, il existe
trois types de modulation
si A varie en fonction de x(t) −→ Modulation d’amplitude
si fp varie en fonction de x(t) −→ Modulation de frequence
si φ varie en fonction de x(t) −→ Modulation de phase
La transmission par modulation permet d’augmenter les distances de propagation.
4.2.4 Definition d’un filtre de Hilbert
On appelle filtre de Hilbert, le filtre de fonction de transfert
Q(f) = −j sign(f)
Le gain en frequence est egal a 1. Les frequences positives sont dephasees de −90◦, alors que
les frequences negatives sont dephasees de +90◦. Le filtre de Hilbert est un dephaseur pur
de −π2
appele aussi filtre en quadrature.
CERI Avignon Traitement du signal J.-P.Costa

28 Chapitre 4. Filtrage
Calcul de la reponse impulsionnelle
La TF de s(t) = sign(t) est egale a S(f) = 1jπf
. A partir du theoreme de dualie :
s(t)TF
−→S(f)
S(t)TF
−→s(−f)
on peut ecrire,
h(t) =1
πt
comme h(t) n’est pas causal, Q(f) n’est pas realisable physiquement.
Transformee de Hilbert
On definit la transformee de Hilbert x(t) comme la sortie d’un filtre quadratique,
x(t) =1
π
∫ +∞
−∞
x(t′)
t− t′dt′
X(f) = −j sign(f)X(f)
Cette integrale pose des problemes pour t = t′, aussi on prend la valeur principale au sens
de Cauchy,
x(t) =1
π
[limε→0−
∫ t+ε
−∞
x(t′)
t− t′dt′ + lim
ε→0+
∫ +∞
t+ε
x(t′)
t− t′dt′]
4.2.5 Signal analytique associe a un signal reel
L’idee est de dire que comme un signal x(t) reel possede un spectre X(f) a symetrie
hermitienne X(−f) = X∗(f) la connaissance de X(f) pour f > 0 est suffisante pour
caracteriser ce signal reel x(t).
On definit le signal analytique zx(t) associe au signal reel x(t) comme etant le signal complexe
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

4.2 Transmission de signaux 29
zx(t) tel que son spectre Zx(f) soit definit comme suit,
Zx(f) = 2X(f) si f > 0
= 0 si f < 0
Remarques
– zx(t) est forcement complexe car son spectre n’est pas a sysmetrie hermitienne.
–
Zx(f) = 2u(f)X(f) u : fonction Heaviside
Zx(f) = [1 + j(−j sign(f))]X(f)
Zx(f) = X(f) + j Q(f)X(f)
– par Fourier inverse,
zx(t) = x(t) + j x(t)
– puisque le spectre de zx(t) est nul pour f < 0
zx(t) = 2
∫ +∞
0
X(f) ej2πft dt
– passage de zx(t) a x(t) : x(t) = < [zx(t)]
– filtrage de signaux analytiques, y(t) = h(t) ∗ x(t) donne zy(t) = h(t) ∗ zx(t).
4.2.6 Enveloppe complexe des signaux bande etroite
On rappelle qu’un signal bande etroite est un signal passe bande reel tel que f0 � B. Pour
ces signaux on definit l’enveloppe complexe αx(t) d’un signal bande etroite x(t) associee a
la frequence f0, le signal complexe en bande de base tel que,
αx(f) = Zx(f + f0)
(On ramene le signal passe bande en bande de base).
CERI Avignon Traitement du signal J.-P.Costa

30 Chapitre 4. Filtrage
4.2.7 Amplitude et phase instantanees d’un signal bande etroite
αx(t) est un signal complexe,
αx(t) = ax(t) ejφx(t)
x(t) = ax(t) cos(2πf0t+ φx(t))
avec ax(t) l’amplitude instantanee du signal passe bande x(t), et φ est la phase instantanee.
On interprete un signal bande etroite x(t) autour de la frequence f0 comme une sinusoıde
de frequence f0 dont l’amplitude et la phase instantanee varient lentement par rapport a f0.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

31
Deuxieme partie
Transmission analogique
CERI Avignon Traitement du signal J.-P.Costa

32 Chapitre 1. Modulation d’amplitude
Chapitre 1 Modulation d’amplitude
1.1 Introduction
La modulation est un principe tres utilise en telecommunications. C’est un procede permettant
de transformer le signal que l’on souhaite transmettre s(t), en un signal adapte au canal de
transmission qui est a bande passante limitee. Il s’agit donc de transposer le signal de donnees
dans un domaine de frequence compatible avec le support (le canal de communication). Un
moyen d’obtenir cette transposition consiste a effectuer une modulation d’un signal appele
porteuse (signal module) par le signal utile (signal modulant). La modulation utilise une
onde sinusoıdale de reference appelee porteuse, dont la frequence est tres superieure au
signal modulant. La porteuse p(t) est representee par :
p(t) = Ap(t) cos(ωp t+ φ(t)), ωp = 2π fp
dans cette formule, fp represente la frequence porteuse,Ap(t) et φ(t) represente respectivement
l’amplitude instantanee et la phase instantanee de la porteuse modulee.
Lorsque Ap(t) depend lineairement de s(t) on a une modulation d’amplitude. Dans le cas ou
la phase φp(t) = ωp t+φ(t) depend lineairement de s(t) on a une modulation de phase ou de
frequence. Ces deux dernieres modulations sont regroupees sous l’appellation de modulation
d’argument.
Dans le cas de la modulation d’amplitude, la porteuse peut s’ecrire (φ(t) = 0) :
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.2 Modulation a bande laterale double 33
p(t) = Ap(t) cos(ωp t) (1.1)
suivant le type de relation spectrale entre s(t) et Ap(t) on distinguera plusieurs type de
modulations.
1.2 Modulation a bande laterale double
On est en presence d’une modulation BLD lorsque l’amplitude de la porteuse est proportionnelle
a s(t), c’est a dire que le signal resultant est de la forme
xbld = α s(t) cos(ωp t)
souvent α = 1.
Le principe de cette modulation revient a multiplier le signal utile s(t) par cos(ωp t)
La valeur de fp est souvent grande devant la frequence maximale de s(t).
1.2.1 Demodulation d’un signal BLD
En reception, il faut extraire le signal utile. Cette operation s’appelle demodulation. Le
message s(t) peut etre extrait du signal xbld en le multipliant par une porteuse locale
cos(ωp t), et en utilisant un filtre passe-bas pour eliminer les frequences hors du domaine du
signal utile.
xbld × cos(ωp t) =1
2s(t)(1 + cos(2ωp t))
La difficulte principale de cette methode de demodulation est de disposer d’un signal de
meme frequence que celle de la porteuse p(t).
1.3 Modulation d’amplitude ordinaire
C’est le procede de modulation d’amplitude le plus courant, utilise en radiodiffusion. Il
consiste a laisser une porteuse d’amplitude significative dans un signal a double bande
CERI Avignon Traitement du signal J.-P.Costa

34 Chapitre 1. Modulation d’amplitude
Fig. 1.1 – Modulation a bande laterale double
laterale.
Cette modulation d’amplitude, appelee AM, apparaıt comme une simple multiplication de
la porteuse par un signal k+αs(t), qui est une fonction lineaire du message. Le signal obtenu
est donc :
xam = [k + αs(t)] cos(ωp t) (1.2)
En general α = 1.
1.3.1 Demodulation d’un signal AM
L’avantage de ce procede AM est sa simplicite de demodulation, connue sous le nom de
detection d’enveloppe. La condition de bon fonctionnement d’un detecteur d’enveloppe en
AM est la suivante :
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.3 Modulation d’amplitude ordinaire 35
Fig. 1.2 – Signal AM et son enveloppe
k + s(t) > 0 quel que soit t
ou encore
k ≥ |min(s(t))| (1.3)
La forme la plus simple d’un detecteur d’enveloppe est d’associer une diode en serie avec
un circuit RC parallele. Lors de l’alternance positive du signal qui lui est applique, la diode
est polarisee dans le sens passant et la capacite C se charge rapidement a la valeur crete du
signal. Des que celui-ci se met a decroitre, la diode est polarisee en inverse et se bloque. La
capacite C se decharge lentement dans la reristance R jusqu’a l’alternance positive suivante.
Pour que ce detecteur fonctionne de facon correcte, il faut choisir une constante de temps
adequate pour la decharge de la capacite C. En pratique , il suffit d’avoir :
CERI Avignon Traitement du signal J.-P.Costa

36 Chapitre 1. Modulation d’amplitude
1
fp� 1
fM
Fig. 1.3 – Detecteur d’enveloppe en AM
1.3.2 Index de modulation
On definit pour la modulation d’amplitude un index de modulation µ :
µ =|min[s(t)]|
k
D’apres la relation 1.3, la condition pour pouvoir demoduler un signal AM au moyen d’un
detecteur d’enveloppe est :
µ ≤ 1
Lorsque µ > 1, le signal est dit surmodule, ce qui produit une distorsion de l’enveloppe
representant le signal utile.
1.4 Modulation a bande laterale unique
Les systemes de modulations AM et BLD ont une occupation spectrale excessive du spectre
de frequence puisqu’ils necessitent une largeur de bande egale a 2 fois celle du signal utile.
Comme l’une ou l’autre des 2 bandes contient a elle seule toute l’information necessaire pour
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.5 Modulation a bande laterale residuelle 37
reconstituer le signal, il suffit de n’en transmettre qu’une. On parle alors de transmission a
bande laterale unique (BLU).
Une methode permettant d’obtenir un signal BLU, consiste a supprimer une des 2 bandes
laterales par filtrage. Cette solution n’est cependant pas simple a mettre en oeuvre car il
impose des filtres de caracteristiques tres raides.
1.4.1 Demodulation
La demodulation des signaux BLU, peut s’effectuer par le produit du signal incident par
une porteuse locale et qu’on filtre le signal obtenu au moyen un filtre passe-bas.
1.5 Modulation a bande laterale residuelle
La modulation BLR est un compromis entre la BLU et la BLD. En effet, on transmet
une bande laterale dans sa presque totalite et seulement une fraction de l’autre. La bande
passante requise pour la transmission d’un tel signal est de l’ordre de 1.25 fois celle que
requiert un signal BLU. On utilise la methode BLR pour la diffusion des signaux video de
television.
1.6 Applications des modulations analogiques
1.6.1 Subdivisions des bandes de frequences
La modulation est systematiquement utilisee dans le domaine des liaisons radio, tant pour
la radiodiffusion que pour les reseaux radio civils ou militaires.
Pour une zone geographique donnee, chaque emetteur radio ou chaque reseau radio recoit un
intervalle de frequences dans lequel le signal module peut etre emis; de cette maniere, il n’y a
aucun recouvrement des differents spectres emis, et en principe, pas d’interferences mutuelles
entre reseaux radio. Pour le plupart des modulations (AM, FM, PM), la frequence centrale
de chaque intervalle correspond a la frequence fp de la porteuse. La largeur de chaque
intervalle de frequences, de meme que le type de modulation dependent de l’application
(radiodiffusion, reseau mobile, etc) et du mode de propagation des ondes.
CERI Avignon Traitement du signal J.-P.Costa

38 Chapitre 1. Modulation d’amplitude
Les subdivisions des bandes en frequences sont decrites sur les tableaux ci-dessous :
RadiodiffusionBande Denomination Type de modulation Bande passante150 - 260 kHz Ondes longues AM classique 10 kHz530 - 1605 kHz Ondes moyennes AM classique 10 kHz88 - 108 MHz VHF bande II FM 200 kHz
Reseaux militairesBande Denomination Type de modulation Bande passante1,5 - 30 MHz HF SSB-SC * 3 kHz30 - 88 MHz VHF FM 25 kHz225 - 400 MHz UHF (air-sol et air-air) AM classique 25 KHz
Tab. 1.1 – Subdivision des bandes de frequences, * single side bande suppressed carrier(frequency).
1.6.2 Transposition de frequence
Dans certaines applications, notamment en reception de signaux modules, on fait souvent
une transposition en frequence afin de decaler la bande occupee par le signal dans une autre
region du spectre de frequence. C’est ainsi que la plupart des recepteurs radio AM, recepteurs
commerciaux de la gamme moyennes ondes, les signaux radio-frequence (RF) recus (de 540
a 1600 kHz) sont transposes autour d’une frequence intermediaire FI de 455 kHz avant
d’etre plus facilement amplifies, filtres et demodules. On qualifie ainsi cette operation de
changement de frequence heterodynage.
Le probleme associe a l’heterodynage est l’apparition de frequences images. Supposons que
l’on regle le recepteur sur une station dont la frequence est de 600 kHz, l’oscillateur local
produira un a 1055 kHz. Supposons qu’il existe une autre station emettant sur 1510 kHz,
elle sera egalement recue par le recepteur, puisque la difference 1510-1055=455 kHz. Cette
deuxieme frequence 1510 = 600 + 2 × 455 est appelee frequence image de la premiere.
Apres l’operation d’heterodynage, elles sont impossibles a distinguer. On notera que cette
frequence image est distante de la frequence utile d’une valeur egale a 2 × FI.
On ecarte cette frequence indesirable au moyen d’un filtre haute frequence (radio frequence,
RF) qui precede le melangeur.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.6 Applications des modulations analogiques 39
Les avantages de ce procedes, dit detection heterodyne sont :
– en reception radio (son ou television), ceci permet d’utiliser le meme demodulateur,
operant sur la frequence intermediaire pour tous les canaux. On utilise aussi bien ce
procede en modulation d’amplitude qu’en modulation de frequence.
– il espace la frequence porteuse selectionnee de sa frequence image d’un intervalle de
frequence egal a 2 FI, ce qui facilite le filtrage. En effet, si 2 FI est superieure a la
bande occupee par l’ensemble des canaux devant etre recus, un filtre passe bande fixe
suffit a eliminer toutes les frequences image.
Ainsi, en reception de radiodiffusion ( de la bande FM, s’etendant de 87 a 108 MHz,
on passe par une frequence intermediaire de valeur : FI = 10,7 MHz.
1.6.3 Multiplexage en frequence
Principe
Le multiplexage est une technique permettant d’assembler plusieurs messages en un seul
message composite afin de le transmettre sur un seul et meme canal de communication. Il
existe 2 types de multiplexage, le multiplexage en frequence et le multiplexage temporel.
Dans le premier cas, les divers signaux sont repartis sur plusieurs frequences distinctes tandis
que, dans le second, ils sont segmentes dans le temps.
Le multiplexage frequentiel est utilise en telephonie, en radiodiffusion, en television et sur
les reseaux de communication.
Les stations de radiodiffusion en moyennes ondes emettent sur des frequences espaces de 10
kHz dans une gamme qui va de 540 kHz a 1600 kHz. Cette separation est insuffisante pour
la transmission AM en haute fidelite d’emissions musicales, qui exige pour la modulation
audio une bande passante d’au moins 15 KHz. C’est pourquoi l’on attribue les frequences
voisines qu’a des stations AM geographiquement distantes pour reduire les interferences.
Les emissions commerciales en modulation de frequence (FM), utilisent des canaux de
frequences distants de 200 kHz. Sur les liaisons telephoniques a grande distance, on sait
transmettre jusqu’a 600 communications (dont la bande passante s’etend de 200 Hz a 3.2
KHz) sur un cable coaxial ou un faisceau hyperfrequence en utilisant une modulation BLU
de frequences porteuses separees de 4kHz. Le signal composite obtenu par sommation des
CERI Avignon Traitement du signal J.-P.Costa

40 Chapitre 1. Modulation d’amplitude
signaux elementaires transposes en frequence module habituellement une porteuse generale,
raison pour laquelle on appelle sous porteuse individuelles assurant les transpositions de
frequence en question.
Fig. 1.4 – Multiplex frequentiel
Application aux signaux telephoniques
En telephonie, l’ITU-T (International Telecommunication Union - Telephonie)a recommande
de limiter la largeur spectrale d’un signal telephonique a 3100 Hz dans la bande de 300 -
3400 Hz.
L’ITU-T a des lors recommande de consacrer un intervalle de frequence de 4000 Hz a chaque
voie de transmission telephonique. De plus, il a ete introduit une sorte de hierarchie pour
les signaux multiplex. Une fois que l’on a obtenu plusieurs signaux multiplex, ou groupe
primaires, comprenant chacun P voies de transmission, il est possible de multiplexer ces
groupes primaires entre eux pour former des groupes secondaires, et ainsi de suite.
Les normes de l’ITU-T recommande ce qui suit :
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.7 Exercices 41
Denomination Nb de groupes Nb de voies Largeur spectraleVoie de transmission 1 4 kHzGroupe primaire 1 12 48 kHzGroupe secondaire (Super) 5 60 240 kHzGroupe tertiaire (Master) 5 super 300 1,2 MHzGroupe quaternaire (Supermater) 3 master 900 3,6 MHz
Tab. 1.2 – Normes de l’ITU - T.
1.7 Exercices
1.7.1 Modulation BLD
1. Evaluer l’effet d’une erreur de phase de l’oscillateur local sur le detecteur synchrone
BLD.
2. Evaluer l’effet d’une erreur de frequence minime (∆ω) de l’oscillateur local sur le
detecteur synchrone BLD.
1.7.2 Multiplex frequentiel
1. Sachant que la bande radio AM s’etend de 540 a 1600 kHz, que le melangeur transpose
la frequence du signal recu fp a la frequence intermediaire FI de 455 kHz au moyen
d’un oscillateur local de frequence f0, determiner :
– la gamme de frequences dans laquelle doit fonctionner l’oscillateur local lorsque
f0 > fp,
– idem lorsque f0 < fp.
2. Pour assurer le secret des transmissions, on peut traiter le signal dans un systeme
represente par la figure suivante. analyser le systeme et dessiner le spectre du signal
de sortie.
3. En utilisant l’orthogonalite des fonctions sinus et cosinus, il est possible d’emettre et
de recevoir simultanement 2 signaux sur la meme frequence porteuse. Le principe
sur lequel repose ce genre de systeme, multiplexage a quadrature ou modulation
d’amplitude en quadrature (QAM) est illustre par la figure ci-apres. Montrer que
chacun des signaux peut etre extrait au moyen d’une detection synchrone faisant appel
CERI Avignon Traitement du signal J.-P.Costa

42 Chapitre 1. Modulation d’amplitude
a 2 oscillateurs locaux de meme frequence mais fonctionnant en quadrature (dephases
de π4).
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

43
Troisieme partie
Transmission d’informations
numeriques
CERI Avignon Traitement du signal J.-P.Costa

44 Chapitre 1. Generalites
Chapitre 1 Generalites
1.1 Le modele OSI des reseaux de communication
Le modele d’interconnexion des systemes ouverts (OSI, Open Systems Interconnection), sert
de modele a la conception de tous les reseaux. Il est compose de 7 couches decrites dans le
tableau 1.1. Il s’agit d’un modele de reference dans le cadre duquel chaque type de reseau a
ses propres normes, definies par divers organismes qui suivent ce modele.
Cette classification a un double interet car :
– elle permet de definir precisemment les differentes fonctions a assurer pour mettre en
communication 2 systemes de traitement de donnees
– elle definit, entre deux couches voisines, une interface normalisee permettant d’interconnecter
des equipements de constructeurs differents ou destines a des supports de transmission
differents.
Dans la suite nous allons nous interesser plus particulierement a la premiere couche representant
la couche physique qui met en oeuvre la transmission proprement dite et qui depend de la
nature physique du support.
1.2 Canal de communication
Quelque soit le type de transmission d’informations utilise, on peut le mettre sous la forme
du schema bloc represente par la figure 1.1.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.2 Canal de communication 45
N◦ Couche Fonction Forme des donnees
1 Physique Modulation/Demodulation,transcodage specifique au support utilise. bits
2 Liaison logique protocole d’echanges de donnees etcorrection d’erreurs de transmission trames
3 Reseau routage des paquets a travers le reseaux paquets
4 Transport transport du message, stabilitecontrole de flux flux
5 Session Mise en place du dialogue entre taches distantes,synchronisation, verification des droits d’acces
6 Presentation syntaxe et presentation des donnees echangees
7 Application Interfacage avec les systemes utilisateurs
←− Support physique −→
Tab. 1.1 – Le modele OSI.
La transmission de donnees se fait entre une source et un destinataire a travers un canal de
transmission (ou canal) correspondant au support physique.
La source emet un signal.
Le message est vehicule a travers le canal qui est le siege de phenomene de propagation
(bruits, defauts, perturbations) qui est munie d’equipement de transmission.
Ce message est transmis jusqu’au recepteur.
Remarques :
– La source et le destinataire peuvent etre un ordinateur ou un terminal, une antenne
et un recepteur radio, . . .
– Les canaux peuvent etre des lignes telephoniques, des faisceaux hertziens ou des voies
CERI Avignon Traitement du signal J.-P.Costa

46 Chapitre 1. Generalites
Source −→ Canal −→ Destinataire↑
Perturbations
Fig. 1.1 – Le canal de transmission
radioelectriques, . . .
– Ces differents canaux de transmissions ont des caracteristiques specifiques. Ils ne sont
pas concus pour transmettre des donnees binaires, il est donc necessaire d’adapter la
source et le destinataire au canal utilise. C’est le role des equipements de transmission.
1.3 Types de transmissions
1.3.1 Quelques elements d’un systeme de transmission
La figure 1.2 represente les differents elements intervenant dans la transmission des donnees.
Fig. 1.2 – Elements d’un systeme de transmission
La machine de traitement peut etre source ou collecteur de donnees : equipement de
traitement, de memorisation, d’acquisition de l’information (ordinateur, peripherique,. . . ).
Le controleur de communication est charge en particulier de la protection contre
les erreurs et du dialogue entre les deux systemes. Il peut constituer un sous ensemble
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.3 Types de transmissions 47
physiquement dissocie de la structure de traitement.
L’interface permet d’adapter le signal electrique au support physique de transmission.
Cette fonction est assuree en general par modulation/demodulation. L’equipement realisant
cette fonction s’appelle un modem.
1.3.2 Transfert entre 2 systemes
Le transfert d’informations entre 2 systemes A et B peut s’effectuer par :
1. Simplex : le canal est toujours utilise dans le meme sens
(unidirectionnel) A → B.
2. Half duplex : la transmission s’effectue alternativement dans un sens puis dans l’autre
(1 ou 2 canaux), la liaison est dite bidirectionnelle A B.
3. Full duplex : les echanges peuvent avoir lieu simultanement dans les deux sens, la
liaison est dite bidirectionnelle integrale A � B.
1.3.3 Transmission analogique/numerique
Les informations echangees peuvent etre de nature differentes. En effet, on peut avoir des
informations de type analogique ou numerique.
Les informations analogiques resultent de la transformation d’un signal physique, fonction
continue du temps, en un signal electrique. On y retrouve essentiellement le son (telephone,
radiodiffusion), les images. Pour les transmettre sous cette forme, il est necessaire que le
reseau de telecommunication deforme le moins possible le signal transmis. La bande passante
est la principale caracteritique pour la transmission des signaux analogiques.
Les informations numeriques sont des nombres entiers qui peuvent representer soit une
valeur numerique, soit une donnee codee.
Suivant la nature de l’information et la nature de la transmission on peut avoir :
1. Transmission analogique d’informations analogiques : emission de la parole sur
le reseau telephonique, emission d’images television sur le reseau de telediffusion,. . .
CERI Avignon Traitement du signal J.-P.Costa

48 Chapitre 1. Generalites
2. Transmission numerique d’informations numeriques : Les signaux sont transmis,
eventuellement apres un codage prealable, directement sur le support de transmission.
On parle de transmission en bande de base.
3. Transmission analogique d’informations numeriques : modulation d’une onde
porteuse par un signal numerique.
4. Transmission numerique d’informations analogiques : cette transmission necessite
une transformation du signal analogique en une suite de donnees binaires : c’est le
processus de numerisation.
L’interet est double :
– Le processus de transmission des donnees est le meme quelque soit la nature
initiale des donnees (analogique ou numerique).
– Le traitement, le stockage et la restitution des donnees sont largement facilites
en utilisant des donnees numeriques plutot que les donnees analogiques.
1.4 Les supports physiques
Les caracteristiques de la transmission sont fortement liees au type de support physique
utilise, on privilegiera un support par rapport a un autre en fonction des contraintes de
l’application et donc des contraintes de la transmission (robustesse aux perturbations, debit,
. . .).
1.4.1 Cables conducteurs
Ce sont les supports les plus employes au niveau des utilisateurs pour des raisons de cout,
d’existence prealable des cablages dans les batiments, de compatibilite directe des signaux
electriques avec les cartes electroniques des terminaux. Il en existe 2 types :
– les cables a paires symetriques : chaque paire est composee de 2 fils identiques en
general torsades sur lesquels se propage une onde electrique. Souples et economiques,
ces cables sont utilises pour les reseaux locaux et les lignes telephoniques d’abonnes.
Ils peuvent transporter des signaux de largeurs de bandes de plusieurs kHz pour la
telephonie analogique et modems et jusqu’a plusieurs dizaines de MHz en numerique.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.4 Les supports physiques 49
– les cables a paires coaxiales : sont principalement utilises en reseaux locaux informatiques
haut debit (plus haute qualite en haute frequence) et surtout en distribution video. Ils
sont pratiquement remplaces par les fibres optiques dans les reseaux etendus et longue
distance.
1.4.2 Cables a fibre optiques
Vehiculant des ondes lumineuses, les fibres optiques, sont beaucoup plus performantes et
aussi plus sures, souvent plus pratiques que les cables conducteurs. Ces cables sont un
support de transmission en pleine expansion dans les reseaux longue et tres longue distances.
Ils permettent la transmission de debits depassant plusieurs centaines de Mbit/s, atteignant
actuellement des dizaines de Gbits/s.
1.4.3 Transmissions sans fil
Bien qu’il n’y ait plus de support au sens materiel, les ondes electromagnetiques jouent
le role du support physique et la couche physique est presente sous la forme d’emetteurs,
de recepteurs et d’antennes. En particulier, les ondes radio sont de plus en plus utilisees
notamment par les satellites, mais aussi du fait de l’explosion des communications avec les
mobiles.
Contrairement aux supports precedents, la propagation n’est plus guidee, ce qui pose des
problemes specifiques, tels que la perturbation de la propagation des ondes, partages des
frequences, protection des informations.
Le domaine des frequences utilisees pour les telecommunications ne cesse de s’accroıtre : il
est passe des ondes courtes (3-30MHz) aux hyperfrequences (2-60 GHz) avec les faisceaux
hertziens et les satellites, et s’insere dans la bande UHF (200, 400, 900 et 1800 MHz) pour
les communications avec les mobiles.
Les ondes infrarouges connaissent un developpement croissant, pour les communications
en visilite directe a tres courte distance et de preference indoor (telecommande, robotique
CERI Avignon Traitement du signal J.-P.Costa

50 Chapitre 1. Generalites
mobile, . . .). Elles peuvent transporter de hauts debits et resolvent certains problemes de
perturbations et de confidentialite poses par les liaisons radio.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

51
Chapitre 2 Transmission analogique
2.1 Caracteristiques d’un canal
2.1.1 Deformation du signal emis
Une voie de transmission (canal) permet l’acheminement de l’information. Ces voies sont
caracterisees par leur comportement vis a vis d’ondes sinusoıdales que l’on appelle aussi
ondes elementaires.
Source −→ Canal −→ Destinataire↑
Perturbations
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
−10
−8
−6
−4
−2
0
2
4
6
8
10
Onde élémentaire
Temps
Fig. 2.1 – Perturbation du canal sur l’onde elementaire.
On rappelle que l’onde elementaire est definie par :
x(t) = A sin(ω0t+ ϕ)
ou A est l’amplitude, ω0 = 2πf0 la pulsation, f0 la frequence et ϕ la phase a l’origine.
CERI Avignon Traitement du signal J.-P.Costa

52 Chapitre 2. Transmission analogique
Les canaux ne peuvent pas acheminer n’importe quel signal. Les signaux doivent respecter
certaines contraintes (de frequence en particulier). De plus, ces signaux sont soumis a des
perturbations et des attenuations.
Il existe donc 3 grandeurs principales caracterisant l’influence du canal sur l’onde emise :
l’attenuation, le dephasage et la bande passante.
– L’attenuation : le signal en reception a une amplitude Ar plus faible que l’amplitude
de l’onde emise Ae.
– Le dephasage : represente le retard du signal recu par rapport au signal emis (∆(ϕ) =
ϕr − ϕe 6= 0).
Exemple
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02−10
−8
−6
−4
−2
0
2
4
6
8
10Déphasage 60° et Atténuation du signal émis
Temps
signal émis signal recu
Fig. 2.2 – Deformation du signal
2.1.2 La bande passante
La bande passante (BP) est la caracteristique essentielle d’un canal.
En pratique, les signaux emis ne sont pas aussi simples que les signaux elementaires de
type sinusoıdaux (1 pic en frequence). En effet, les signaux recouvrent une certaine plage
de frequences. Au cours de la transmission, le canal joue le role d’un filtre lineaire et agit
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

2.1 Caracteristiques d’un canal 53
plus ou moins, en fonction de la frequence, sur l’amplitude et le dephasage du signal. En
particulier, certaines frequences seront tellement affaiblies que l’on peut considerer qu’elles
ne sont pas transmises par le canal.
La reponse en frequence du filtre (G), exprime en dB, est donnee par la relation suivante :
G(f) = 20 log10
(|TF [signal recu]|| TF [signal emis]|
)Pour les frequences dont
– G(f) > 0 il y a un gain en amplitude,
– G(f) = 0 le filtre ne modifie pas l’amplitude et
– G(f) < 0 il y a une attenuation du signal.
La bande passante a 3dB correspond a la bande en frequence (f2−f1) pour laquelle Gmax ≤G(f) ≤ Gmax-3dB, f1 ≤ f ≤ f2
0 500 1000 1500 2000 2500 3000 3500 4000−35
−30
−25
−20
−15
−10
−5
0
5
Fréquences
Réponse en fréquences d’un filtre
Bande Passante (f2−f
1 )
f1
f2
Fig. 2.3 – Bande Passante d’une ligne telephonique BP=3100 Hz
2.1.3 Quelques definitions
– Intervalle significatif (seconde) : temps (T) pendant lequel les caracteristiques du
signal a transmettre ne sont pas modifiees.
– Rapidite de modulation (R en bauds) : Nombre de changements d’etats du signal
par seconde sur la ligne de transmission. C’est l’inverse de l’intervalle significatif (1/T).
CERI Avignon Traitement du signal J.-P.Costa

54 Chapitre 2. Transmission analogique
– Debit binaire (D en bits/sec) : quantite d’informations par seconde emise par la
source, D=nR ou n correspond au nombre de bits transmis par etat.
1.8 2 2.2 2.4 2.6 2.8 3 3.2
V0
V1
V2
V3
Temps
0 0 0 0 1 1 0 1 1 0
T
Fig. 2.4 – R=5 bauds, n=2 bits, D=10 bits/sec
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

2.2 Transmission numerique par modulation d’une porteuse 55
– Rapidite de modulation maximale : Rmax ≤ 2 BP
– Valence d’un signal (V) : Nombre d’etats significatif V=2n.
Donc n=log2(V) avec log2(x)=ln(x)/ln(2).
– Debit binaire maximal : Dmax = 2 BP log2 V
– Le bruit : afin de determiner l’influence du bruit, on considere le rapport de la
puissance du signal transmis sur celle du bruit (exprime en dB) : S/B=10 log10(PSPB
).
On parle de rapport signal sur bruit.
– Valence maximale : La presence du bruit limite le nombre de niveaux significatifs
Vmax=√
1 + PSPB
– Capacite maximale d’un canal (C en bits/sec)
Cmax = BP log2 (1+S/B)
Une ligne telephonique a une BP =3000 Hz et offre un S/B de 30 dB, C=3000 ln(1 +
103010 )/ ln 2 = 29902 bits/sec.
2.2 Transmission numerique par modulation d’une porteuse
2.2.1 Generalites
Dans le cas ou le canal a une bande passante etroite la transmission des signaux en bande
de base n’est pas adaptee. La modulation permet d’adapter le signal en bande de base
aux caracteristiques du canal a l’aide d’un signal elementaire (sinusoıdal) appele porteuse,
d’equation : A sin(ω0t+ ϕ). Il existe donc trois types de modulation :
Signal binaire
1. A variable La modulation d’amplitude Saut d’amplitude
2. f0 variable La modulation de frequence Saut de frequence
3. ϕ variable La modulation de phase Saut de phase
Certaines transmissions de donnees combinent plusieurs de ces modulations pour augmenter
la valence du signal.
On definit la frequence rythme Fr (=rapidite de modulation) comme etant l’inverse de la
duree T consacree a la transmission d’un symbole elementaire (un etat)
CERI Avignon Traitement du signal J.-P.Costa

56 Chapitre 2. Transmission analogique
2.2.2 Modulation d’amplitude : A variable
Principe
La modulation par saut d’amplitude ou commutation d’amplitude (ASK Amplitude shift
keying) consiste a affecter a chaque etat une valeur d’amplitude de la porteuse. En gardant ω0
et ϕ constant, on modifie A selon la suite des signaux binaires a transmettre. Par exemple, le
cas le plus simple et le plus employe, de modulation par saut d’amplitude, est la modulation
par tout ou rien (OOK On-Off Keying) :
A = 0 si le bit est a 0
A = +V si le bit est a 1
Dans cette modulation, a 1 correspond l’emission de la porteuse, a 0 correspond son interruption
(ou par convention l’inverse).
Message
0
1
+V
0
−V
Fig. 2.5 – Modulation d’amplitude
Demodulation
Une simple detection d’enveloppe permet de retrouver le signal en bande de base.
Caracteristique
Cette modulation est peu efficace et ne permet pas de distinguer le symbole zero de l’absence
d’information.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

2.2 Transmission numerique par modulation d’une porteuse 57
2.2.3 Modulation de frequence : f0 variable
Principe
La modulation par saut de frequence ou commutation de frequence (FSK Frequency shift
keying) consiste a affecter une frequence a chaque etat. En gardant A et ϕ constant on
modifie f0 selon la suite des signaux binaires a transmettre. Par exemple :
f0 si le bit est a 0
f1 = 2 f0 si le bit est a 1
Message
0
1
+V
−V
Fig. 2.6 – Modulation de frequence
Demodulation
Le demodulateur consiste en general a separer par filtrage les frequences f0 et f1, et a
demoduler separement 0 et 1. Cette demodulation peut-etre :
– incoherente : redressement et filtrage passe-bas, c’est la plus simple.
– coherente : demodulation synchrone sur chaque voie, qui suppose une recuperation
de la phase. Elle est plus efficace et permet de reduire l’ecart entre les frequences,
donc reduit l’encombrement spectral. Le demodulateur coherent est une realisation
du recepteur optimal lorsque la modulation est coherente, c’est a dire que f0 et f1
sont multiples entiers de Fr. Dans ce cas :
CERI Avignon Traitement du signal J.-P.Costa

58 Chapitre 2. Transmission analogique
∫ T
0
cos(2πf0t) cos(2πf1t) dt = 0 (les etats sont orthogonaux).
Caracteristique
Cette modulation a, par rapport a la modulation par tout ou rien, l’avantage de distinguer le
symbole 0 de l’absence de signal, ce qui autorise la transmission asynchrone. On l’utilise dans
des applications simples, lorsqu’il n’y a pas de restriction de bande passante : telecommande,
modem a 1200 bauds sur ligne telephonique (celui du minitel), ...
2.2.4 Modulation amplitude-frequence : A et f0 variables
En gardant ϕ constant on modifie A et f0 selon la suite des signaux binaires a transmettre
ou chaque etat est represente par plus d’un bit, ce qui augmente la valence du signal (2
bits=Valence de 4). Par exemple : l’amplitude depend du bit de poids fort et la frequence
du bit de poids faible.
Message
0
1
+V2
−V2
0 0 1 0 1 1 0 1
−V1
+V1
Fig. 2.7 – Modulation amplitude-frequence
2.2.5 Modulation de phase : ϕ variable
Les modulations de phase et modulation d’amplitude–phase sont beaucoup plus performantes
et plus utilisees que les precedentes.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

2.2 Transmission numerique par modulation d’une porteuse 59
Principe
La modulation par saut de phase ou commutation de phase (PSK Phase shift keying) consiste
a affecter une phase a chaque etat. En gardant ω0 et A constant on modifie ϕ selon la suite
des signaux binaires a transmettre. Par exemple :
ϕ = +π si le bit est a 0
ϕ = 0 si le bit est a 1
Message
0
1
+V
−V
Fig. 2.8 – Modulation de phase
En utilisant la notation exponentielle du signal module :
Re[A exp j(ωt+ ϕ)]
on fait apparaıtre une amplitude complexe A exp jϕ = x+ jy qu’on represente par un point
dans le plan complexe (dit de phase). A chaque etat est associe un point. En modulation
d’amplitude pure (ASK) les points sont sur l’axe des reels; en modulation de phase pure
(PSK) ils sont sur un cercle. On peut combiner les deux (cf paragraphe 2.2.7).
Modulation de phase a 2 etats
Dans cette modulation (BPSK Binary Phase Shift Keying), les 2 etats sont en opposition de
phase, avec par exemple la regle etablie plus haut. Ceci revient tout simplement a multiplier
la porteuse par le signal logique de niveaux ±1. Le spectre du signal est le spectre en bande
CERI Avignon Traitement du signal J.-P.Costa

60 Chapitre 2. Transmission analogique
90
270
180 0
90
270
180 0
90
270
180 01 0
11
10
01
00
000
001 011
010
110
111
100
101
2 états 4 états 8 états
Fig. 2.9 – Constellations : representation des etats
de base, transpose autour de la frequence porteuse, comme en modulation tout ou rien, mais
aucun symbole ne se confond avec l’absence d’information, et la puissance de la porteuse
reste constante.
Modulation de phase a 4 etats et plus
Dans les modulations a 2n etats, un mot de n bits est associe a un etat. La duree d’un etat
est donc nT (ou T est la duree d’un bit), ce qui permet de diviser la largeur du spectre par
n.
Pour la modulation de phase a 4 etats ou QPSK (Quadrature Phase Shift Keying), on peut
disposes les etats suivant un code de gray, c’est a dire que chaque etats voisins different d’un
seul bit. En cas de confusion d’un etat voisin, seul un bit est faux.
ϕ = π/4 correspond a 11
ϕ = 3π/4 correspond a 10
ϕ = 5π/4 correspond a 00
ϕ = 7π/4 correspond a 01
En modulation de phase a 8 etats, les phases des etats sont espacees de π/4 et correspondent
aux valeurs : k π/4+π/8. Les mots de 3 bits se succedent sur le cercle selon un code de Gray.
Au-dela de 8 etats, une modulation de phase pure donnerait des etats trop rapproches, ce qui
augmenterait le risque d’erreur de transmission. Aussi, on utilise une modulation combinant
l’amplitude et la phase, pour mieux espacer les etats dans le plan de phase.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

2.2 Transmission numerique par modulation d’une porteuse 61
2.2.6 Modulations de phase differentielles
C’est une variante dans laquelle l’information est contenue non pas dans l’ecart de phase
avec la porteuse, dont la phase absolue n’est pas facile a recuperer en reception, mais l’ecart
de phase par rapport a l’etat precedent.
La demodulation se fait en multipliant le signal recu par le signal de l’etat precedent, retarde
de T : le produit est positif si les phases sont les memes, negatif si les phases sont opposees.
Il faut pour cela que T soit un multiple de la periode de la porteuse, c’est que la modulation
soit coherente.
2.2.7 Modulation d’amplitude et phase
Elles sont aussi appelees QAM (Quadrature Amplitude Modulation) car obtenues par modulation
d’amplitude en quadrature. On utilise surtout les modulations a 16 etats qui ont une bonne
efficacite spectrale tout en gardant une sensibilite au bruit limite.
Les principales applications sont en transmissions radioelectriques (faisceaux hertziens a
haut debit) a cause de l’encombrement des frequences, ou sur lignes telephoniques, ou on
peut augmenter le debit des modems (9600 bits/s et plus dans une bande de 3 kHz).
La correspondance entre les 4 bits (d3d2d1d0) et les valeurs x et y dans le plan complexe,
est etablie pour que chaque voisin d’un etat ne differe de celui-ci que d’un bit (chaque etat
ayant 4 voisins au plus, c’est possible). Par exemple :
– x correspond a d3d2 ecrit en code de Gray (00-01-11-10),
– y correspond a d1d0 ecrit en code de Gray.
Q(k)
I(k)
CERI Avignon Traitement du signal J.-P.Costa

62 Chapitre 2. Transmission analogique
2.2.8 Le multiplexage frequentiel
Le multiplexage est une technique permettant d’assembler plusieurs messages en un seul
message composite afin de le transmettre sur un seul et meme canal de communication. Il
existe 2 types de multiplexage, le multiplexage en frequence et le multiplexage temporel.
Dans le premier cas, les divers signaux sont repartis sur plusieurs frequences distinctes tandis
que, dans le second, ils sont segmentes dans le temps.
Bien que le multiplexage en frequence soit plus adapte aux signaux analogiques, cette
technique peut s’appliquer a tout type de signaux.
Le principe de base consiste a moduler chaque information par une frequence porteuse
qui lui est propre. Les differentes porteuses dont l’espacement en frequence tient compte
de l’elargissement spectral du signal module, sont ensuite superposees. Elles pourront etre
separees par filtrage (ou demodulation synchrone). Ce procede permet de multiplexer des
informations de nature, de debits ou d’origines differentes.
Le multiplexage frequentiel est utilise en telephonie, en radiodiffusion, en television et sur les
reseaux de communication. En effet, dans le reseau telephonique analogique il a permis de
multiplexer 10 000 voies telephoniques sur un seul cable coaxial, dans la bande 4-60 MHz.
En Telex, il permet de multiplexer 24 voies telex (50bits/s) dans une voie telephonique
analogique a 3400 Hz et d’offrir un service particulierement economique. En distribution
video, il permet, il permet de multiplexer une trentaine de canaux TV analogiques dans la
bande 40-300 MHz.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

63
Chapitre 3Transmission numerique en
bande de base
On rappelle qu’il faut distinguer deux types de transmission possible :
– la transmission numerique d’informations numeriques. Les signaux sont transmis,
eventuellement apres un codage prealable, directement sur le support de transmission.
On parle de transmission en bande de base.
– La transmission numerique d’informations analogiques. Cette transformation necessite
une transformation du signal analogique en une suite de donnees binaires : c’est le
processus de numerisation.
L’interet de la transmission numerique est double :
– Le processus de transmission des donnees est le meme quelque soit la nature initiale
des donnees (analogique ou numerique).
– Le traitement, le stockage et la restitution des donnees sont largement facilites en
utilisant des donnees numeriques plutot que les donnees analogiques.
3.1 La numerisation
3.1.1 Introduction
Le role des traitements realises sur les donnees a transmettre consiste a augmenter les
performances du systeme de transmission ainsi que la fiabilite des donnees transmises. 3
types de traitement peuvent etre effectues sur les signaux.
1. Numerisation : passage d’un signal analogique a un signal numerique.
CERI Avignon Traitement du signal J.-P.Costa

64 Chapitre 3. Transmission numerique en bande de base
2. Codage en bande de base : transmission numerique d’un signal analogique.
3. Modulation : transmission analogique d’un signal numerique.
Pour transmettre des signaux analogiques, tels que la parole ou les signaux video, une
conversion A/N (CAN) est necessaire. La principale technique est la Modulation par Impulsions
Codees (MIC ou PCM : Pulse code modulation). Il existe d’autre type de modulation comme
par exemple la Modulation delta (DM : delta modulation).
3.1.2 Modulation par impulsions codees (MIC)
Quand un abonne telephonique, relie a un autocommutateur numerique, appelle un correspondant,
les signaux qui circulent sur la desserte locale sont des signaux analogiques. Avant de
penetrer dans le commutateur numerique, les signaux sont transformes en informations
numeriques, codees sur 8 bits, par un dispositif nomme codec (codeur-decodeur). Le codec
est l’inverse d’un modem. Il convertit un signal analogique afin qu’il puisse etre transmis
sous une forme numerique. En revanche, le modem transforme une information numerique
en un signal analogique module. Fonctionnellement, un codec preleve 8000 echantillons par
seconde de l’information analogique recue, soit un echantillon toute les 125 µs. Cette cadence
est suffisante, selon le theoreme de Nyquist, pour echantillonner tout signal compris dans
une bande de frequence de 300 a 3400 Hz.
Les principaux traitements sont dans l’ordre
I II III
l’ echantillonnage =⇒ la quantification =⇒ codage
– L’echantillonnage consiste a prelever des echantillons d’un signal analogique (temps
continu) a des instants discrets.
3.1.3 Echantillonnage
Theoreme d’echantillonnage : Shannon/Nyquist
Un signal x(t) d’energie finie dont le spectre est a support sur [−B,B] peut etre echantillonne
tous les Te sans perte d’information a condition que la frequence d’echantillonnage Fe (ici
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

3.1 La numerisation 65
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01−1.5
−1
−0.5
0
0.5
1
1.5
Signal analogique
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01−1.5
−1
−0.5
0
0.5
1
1.5
Peigne de dirac
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01−1.5
−1
−0.5
0
0.5
1
1.5
Signal echantillonne
frequence de Nyquist) verifie :
Fe = 1Te≥ 2B
Sans perte d’information signifie qu’on peut reconstruire x(t) ∀ instant t a partir de la suite
infinie des echantillons x(kTe).
x(t) =+∞∑
k=−∞
x(kTe)sin(πFe(t− kTe))πFe(t− kTe)
(3.1)
Cette derniere equation correspond a la formule d’interpolation de Shannon.
Quantification / Codage
– Quantification lineaire : La valeur exacte des differents echantillons n’est pas utilisee.
On se contente de rapporter chaque echantillon a une echelle de 2n niveaux appelee
echelle de quantification. Il n’y a donc qu’un ensemble de 2n valeurs possibles pour les
echantillons quantifies. L’erreur systematique que l’on commet en assimilant la valeur
reelle de l’echantillon au niveau de quantification le plus proche est appele bruit de
quantification.
– Codage : La derniere etape de la numerisation est le codage. Les 2n niveaux quantifies
vont etre codes par des valeurs numeriques allant de 0 a 2n − 1, donc elles pourront
etre codees par une suite de n bits. Ainsi, ce n’est pas la valeur du signal echantillonne
qui est transmise au recepteur, mais la valeur codee du niveau quantifie le plus proche
de lui.
Valeur Binaire Valeur Codee Niveau de Quantification
CERI Avignon Traitement du signal J.-P.Costa

66 Chapitre 3. Transmission numerique en bande de base
Valeur Binaire Valeur Codee Niveau de Quantification
111 7 3.5
110 6 2.5
101 5 1.5
100 4 0.5
011 3 -0.5
010 2 -1.5
001 1 -2.5
000 0 -3.5
∆ = le pas de quantification
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014−4
−3
−2
−1
0
1
2
3
4
∆
Pour une transmission par ligne telephonique on utilise n = 8 soit 256 niveaux, la frequence
d’echantillonnage est fe = 8000 Hz. Le debit binaire est donc 8000 echantillons/s × 8
bits/echantillon = 64 kbits/s.
3.1.4 les differentes Normes
Norme americaine
Malheureusement, l’Europe et les Etats-unis n’ont pas reussi a se mettre d’accord sur
le procede. Sur le continent nord-americain, la technique de la societe Bell System (T1)
consiste a multiplexer 24 voies telephoniques. Chaque voie est exploree puis quantifiee
periodiquement a la cadence de 8000 echantillons par secondes. Chaque voie est representee
par un mot de 8 bits. Sept bits representant la valeur quantifiee de l’echantillon preleve, on
dispose ainsi de 127 niveaux de quantification. Le huitieme bit est utilise pour la signalisation
de la voie telephonique.
On obtient ainsi un debit de 56 Kbit/s pour representer les signaux vocaux et un debit de
8 Kbit/s pour la signalisation telephonique qui s’y attache.
Le multiplexage conduit a 192 bits (24 voies a 8 bits). A ces 192 bits, on ajoute un bit pour
permettre d’etablir et de conserver la synchronisation entre trames. On obtient alors une
trame de 193 bits toutes les 125 µs, soit un debit de 1,544 Mbit/s.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

3.2 Quantification non lineaire 67
Norme europeenne
En ce basant sur les principes precedent, le CCITT a considere qu’un debit de 8 Kbit/s
consacre a la signalisation etait trop important. Il a ete decide d’attribuer les 8 bits associes
a une voie telephonique a la quantification exclusive des signaux vocaux. Ainsi au lieu des
7 bits par voie du canal T1 (Bell System), on utilise 8 bits, ce qui conduit a disposer de 256
niveaux de quantification.
Le CCITT propose une solution basee sur une trame de 256 bits contenant 32 voies a 64
Kbit/s, soit un debit total de 2,048 Mbit/s. Trente voies assurent le transport de l’information
utile, les deux autres voies sont assignees a la signalisation. Cela correspond a la technique
de signalisation par voie semaphore. Chaque groupe de 4 trames fournit ainsi 64 bits de
signalisation. 32 bits sont utilises pour la signalisation et 32 pour la synchronisation.
3.2 Quantification non lineaire
3.2.1 Principe
On utilise les informations a priori sur le signal pour augmenter les performances de la
quantification en appliquant un pas de quantification variable.
3.2.2 Exemple : la parole
Le signal de parole conserve un niveau relativement constant avec peu d’extremums. On
va donc favoriser les valeurs faibles du signal par un nombre de niveaux plus important, et
limiter les niveaux pour les autres valeurs.
2 4 6 8 10 12
x 10−3
−8
8
Niv
ea
ux
de
qu
an
tifi
ca
tio
n
CERI Avignon Traitement du signal J.-P.Costa

68 Chapitre 3. Transmission numerique en bande de base
3.3 Compression-Expansion
3.3.1 Principe
En pratique, afin d’obtenir une quantification non lineaire, on utilise la technique suivante.
On comprime la dynamique du signal puis on applique une quantification lineaire. Les
fonctions de compressions font l’objet de normes. C’est ainsi qu’il existe une loi de compression
pour le Japon et les Etats-Unis et une loi de compression pour l’Europe.
3.3.2 Loi µ (Etats Unis – Japon)
y(t) =ln(
1 + µ∣∣∣ x(t)max(x)
∣∣∣)ln (1 + µ)
sgn(x(t))
µ = 255
3.3.3 Loi A (Europe)
y =
A
1+lnA
(x(t)
max(x)
) ∣∣∣ x(t)max(x)
∣∣∣ ≤ 1A
(1+lnA∣∣∣ x(t)
max(x)
∣∣∣)1+lnA
sgn(x(t)) 1A≤∣∣∣ x(t)max(x)
∣∣∣ ≤ 1
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Caractéristique de compression
X
Y
A = 87,6
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

3.4 La modulation MIC differentielle DPCM et ADPCM 69
3.4 La modulation MIC differentielle DPCM et ADPCM
Toutes les methodes de compression reposent sur un meme principe qui considere que
l’amplitude du signal analogique change lentement par rapport a la vitesse d’echantillonnage
(8 Kbit/s). Il en resulte que les echantillons preleves et quantifies sur 7 ou 8 bits presentent
un fort degre de redondance.
Une technique, la modulation MIC differentielle (DPCM) consiste a ne pas transmettre la
valeur quantifiee presente mais la difference entre cette valeur presente et la valeur quantifiee
precedente. Par exemple, si l’on considere que les ecarts de valeur de ± 16 increments, ou
plus, sont tres peu probables dans une plage de 128 increments de quantification possibles,
alors un codage sur 4 bits peu etre suffisant. Dans un cas plus general, on peut utiliser
une prediction lineaire; on obtient alors un codage de type ADPCM (Adaptive Pulse code
modulation).
3.5 Modulation DELTA
3.5.1 Principe
Une autre technique consiste a considerer que chaque valeur quantifiee ne differe de la
precedente que de plus ou moins 1 increment de quantification. Dans ce cas, un seul bit est
transmis pour signaler un changement d’amplitude du signal analogique. Cette technique
n’est valable que pour un signal dont les variations sont lentes. C’est une conversion directe
d’un signal analogique en une suite de bits.
CERI Avignon Traitement du signal J.-P.Costa

70 Chapitre 3. Transmission numerique en bande de base
3.5.2 Modulateur delta
e(t) = m(t)− m(t)
d(t) = ∆sgn[e(t)]+∞∑
n=−∞
δ(t− nTech)
xDM = ∆+∞∑
n=−∞
sgn[e(nTech)]δ(t− nTech)
Le signal de sortie est donc constitue d’une suite d’impulsions de polarite positive ou
negative, suivant le signe de e(t) a l’instant ou l’on echantillonne m(t).
3.5.3 Demodulation
On demodule un signal DM en :
– integrant xDM(t) pour restituer l’approximation m(t) du signal originel m(t)
– puis en filtrant passe bas m(t) afin de le lisser, c’est a dire d’en eliminer les marches
d’escalier.
3.5.4 Remarques
– Il est necessaire que ∆ (les marches) soit de faible hauteur pour reproduire le signal
originel avec une precision suffisante, il faut donc augmenter la frequence d’echantillonage
pour pouvoir suiver les variations rapide du signal.
– Amelioration : modulateur delta adaptatif, la hauteur de marche ∆ est variable en
fonction du niveau du signal d’entree.
3.6 Multiplexage temporel
3.6.1 Principe
Le multiplexage temporel est l’application la plus systematiquement utilisee en telecommunication.
On fait appel a cette technique pour transmettre simultanement plusieurs signaux sur un
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

3.6 Multiplexage temporel 71
meme canal de transmission (cf figure 3.1) . On reduit tout d’abord la largeur de bande de
chacun des signaux a transmettre au moyen de filtre passe-bas, afin d’eliminer les frequences
qui ne sont pas utiles pour la restitution du signal.Les signaux filtres sont appliques a un
commutateur electronique qui echantillonne (fe) a tour de role chacun d’entre eux a une
frequence superieur ou egale a la frequence de Nyquist fM (en general fe = 1.1fM).
Le filtre passe-bas ainsi que la valeur de la frequence d’echantillonnage 1.1 superieur a fM
sont destines a eviter les problemes de recouvrement de spectre (aliasing), permettant ainsi
la reconstruction des signaux. Les echantillons sont donc transmis sur le canal en serie,
entrelaces, pour etre tries et reattribues a leur message d’origine l’arrivee. En reception,
le signal composite est demultiplexe au moyen d’un second commutateur electronique qui
distribue les signaux echantillonnes a leurs filtres passe-bas respectifs avant demodulation. Le
bon fonctionnement du systeme repose sur la synchronisation parfaite des deux commutateurs.
3.6.2 Exemples
1. Deux signaux analogiques m1(t) et m2(t) doivent etre transmis sur un meme canal
en multiplex temporel. La frequence la plus elevee de m1(t) est 3kHz tandis que celle
de m2(t) est de 3.5 kHz. Quelle est la valeur minimale admissible pour sa frequence
d’echantillonnage?
2. Un signal m1(t) presente une largeur de bande de 3.6 kHz; trois autres signaux m2(t),
m3(t) et m4(t) ont chacun une largeur de bande de 1.2 kHz. On desire transmettre ces
signaux sur un multiplex temporel.
(a) Quelle doit etre la frequence de prelevement des echantillons (en echantillons par
seconde) du commutateur.
(b) Si la sortie du commutateur presente 1024 niveaux de quantification, convertis
en binaire, quel est le debit de la liaison (en bits/seconde).
(c) Determiner la bande passante minimale requise pour la liaison.
(d) Dessiner le schema d’un tel systeme, chaque signal etant echantillonne a sa
frequence de Shannon.
CERI Avignon Traitement du signal J.-P.Costa

72 Chapitre 3. Transmission numerique en bande de base
3.7 Codage en bande de base : formatage des signaux
Le codage permet d’adapter le signal numerique qui est en bande de base au canal qui
est egalement en bande de base. Le codage en bande de base se compose de 2 operations
successives :
– Une regle de codage qui etablit une correspondance entre les elements binaires d’information
et des symboles codes.
– Une mise en forme a l’aide d’impulsions electriques pour ameliorer la transmission.
Le code est la loi qui fait correspondre les informations a representer et les configurations
binaires associees, chaque information correspondant a une et une seule configuration binaire.
Si la totalite des configurations binaires n’est pas utilisee, le code est dit redondant.
3.7.1 Code de type non retour a zero (NRZ)
Dans ce format, qui est le plus elementaire, le niveau du signal est constant pendant la
duree T du symbole. Les bits 1 et 0 sont representes par des impulsions d’amplitudes
respectivement positives et negatives de meme valeur absolue. Il n’y a pas de retour a
zero entre 2 bits consecutifs de meme valeur.
Le format NRZ presente plusieurs inconvenients :
– il possede une forte densite spectrale en basses frequences : si le canal ne les transmet
pas correctement de l’information sera perdue,
– il n’y a pas de raie a la frequence rythme, ce qui complique la recuperation de l’horloge,
– en cas de longues suites de symboles identiques, le rythme risque d’etre perdu.
3.7.2 Code RZ (retour a 0)
Dans ce format :
– a 1 correspond le niveau haut (+V), suivi d’un retour a zero,
– a 0 correspond le niveau zero
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

3.7 Codage en bande de base : formatage des signaux 73
3.7.3 Transcodage
On utilise le terme transcodage pour le distinguer du codage effectue a la source des donnees
(codage en ligne ou codage canal).
Cette operation plus complexe consiste a remplacer la suite de symboles par une autre avec
un triple but :
1. supprimer les composantes continues et basses frequences dans le spectre du signal
transcode, afin de ne pas perdre d’information si elles sont mal ou pas transmises,
2. creer des transitions les plus frequentes possibles, pour rendre possible la recuperation
du signal horloge, quelque soit le message d’origine,
3. permettre une mesure statistique du taux d’erreurs.
Concretement, afin de respecter les trois principes decrits ci-dessus on doit remplacer un
groupe de n bits par un groupe de m symboles (a 2, parfois 3 niveaux) dans lequel on cherche
le maximum de transitions et une valeur moyenne la plus constante possible. Ceci amene
a eliminer certaines combinaisons ou mots interdits ce qui suppose une redondance dans le
codage. La condition est donc :
qm > 2n
ou q est le nombre de niveaux des symboles de la traduction.
3.7.4 Codes a deux niveaux et rythme double
Dans ces codes, l’intervalle de temps symbole est divise par 2. On peut considerer que
l’information sera contenue dans la transition entre ces 2 demi-bits. Ces codes sont simples,
et remplissent bien les objectifs fixe ci-dessus. Leur principal inconvenient est de doubler la
frequence d’horloge; ils ne sont donc pas appropries aux hauts debits.
Code biphase Manchester simple
On introduit des transitions au milieu de l’intervalle. Les bits a 1 sont representes par un
front montant et les bits a 0 par un front descendant.
CERI Avignon Traitement du signal J.-P.Costa

74 Chapitre 3. Transmission numerique en bande de base
Code Manchester differentiel
On introduit des transitions au milieu de l’intervalle. Ce code tient compte du bit precedent.
Les bits a 0 sont representes par un changement de polarite au debut d’un temps ”bit” et
les bits a 1 sont caracterises par l’absence de changement de polarite.
3.7.5 Codes de blocs binaires nBmB
Un bloc de n bits est remplace par un bloc de m bits avec m>n. Parmi les 2m traductions
possibles on elimine celle qui :
– presente peu ou pas de transitions,
– ont une somme numerique SN, c’est a dire un difference entre le nombre de 0 et de 1,
trop forte.
Les codes precedents peuvent etre consideres comme des codes 1B2B qui appliquent ces
regles.
3.7.6 Codes a 3 niveaux
On les utilisent surtout pour la transmission sur paire metallique (cable coaxial ou ligne
telephonique). Les 3 niveaux etant alors +V,0,-V, on peut avoir une composante continue
nulle quel que soit le message et utiliser des canaux qui ne passent pas le continu. Sur cable,
ce codage permet egalement de superposer un courant continu d’alimentation et de le separer
du signal par filtrage. Ils permettent egalement de reduire l’encombrement spectral, ce qui
est tres important sur les cables coaxiaux dont l’attenuation augmente avec la frequence.
Les codes les plus utilises sont les suivants :
– le code bipolaire (AMI Alternance Mark Inversion): il consiste a coder 0 par une
tension nulle, 1 par une tension alternativement positive et negative (ou la convention
inverse)
– le code HDB3 (HDBn Haute densite bipolaire d’ordre n), est une variante du code
bipolaire dans laquelle apres une suite de 3 (ou n dans le code HDBn) zeros, le 4e
(n+1eme) est code par une tension non nulle violant la regle d’alternance des polarites,
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

3.7 Codage en bande de base : formatage des signaux 75
afin de maintenir le rythme en cas de longue suite de zeros; un bit de bourrage est
introduit ensuite pour retablir la neutralite electrique.
3.7.7 Codage a spectre etale
Cette technique est aussi appelee modulation a spectre etale (spread spectrum). Cette
technique a d’abord ete utilise pour les applications militaires, car apportant une certaine
protection des informations, le signal transmis prenant l’apparence d’un bruit, cette technique
est utilisee en communication radio (satellites, reseaux mobiles) pour les liaisons fortement
bruitees.
Le principe de cette technique consiste a transmettre sur une porteuse un signal code :
le signal numerique en bande de base de debit Db est multiplie par une sequence binaire
pseudo-aleatoire a un debit Dc beaucoup plus eleve et multiple entier du sien. Ceci permet
d’etaler le spectre considerablement dans un rapport Dc/Db.
A la reception, le signal recu est multiplie par la meme sequence binaire, ce qui restitue le
signal d’origine. Le rapport signal a bruit de fond va s’ameliorer de 10 log(Dc/Db). Si au
cours de la transmission des signaux se sont superposes, signaux de brouillage par exemple,
leur spectre est etale au decodage, car ils ne sont pas correles avec la sequence de codage.
3.7.8 Remarques
Il est important de noter qu’il existe une grande diversite de systeme de codage,
cela en raison des caracteristiques tres variables des canaux de transmission
exploites en telecommunication.
Les parametres importants a prendre en compte lors du choix d’un codage sont :
– l’encombrement spectral,
– sensibilite au bruit,
– le cout et la complexite de mise en oeuvre.
– la confidencialite,
– tolerance aux erreurs de transmission
– . . .
CERI Avignon Traitement du signal J.-P.Costa

76 Chapitre 3. Transmission numerique en bande de base
En d’autres termes, il n’y a pas de solution unique a un probleme de transmission, il faut
trouver des compromis respectant les contraintes de l’application cible.
3.8 Transmission parallele – Transmission serie
1. Transmission parallele : transmission dans laquelle N bits sont emis simultanement,
ce qui necessite N voies de transmission. Ce mode autorise des debits d’informations
eleves, mais a un cout prohibitif lorsque l’emetteur et le recepteur sont eloignes l’un
de l’autre.
2. Transmission serie : les bits sont emis successivement sur la meme voie. Ce mode
necessite une synchronisation entre l’emetteur et le recepteur.
– Transmission asynchrone : la synchronisation bit est re-initialisee au debut et
a la fin de chaque caractere par un ou plusieurs bits de Start et Stop . L’emetteur
transmet des donnees de facon independante du recepteur. C’est un mode de
transmission simple mais il diminue la capacite du canal.
– Transmission synchrone : la synchronisation est maintenue en permanence, en
l’occurrence par un signal d’horloge.
– Pour les transmission courtes, un conducteur separe transmet vers le recepteur le signal
d’horloge parallelement aux donnees.
– Pour les transmission longues distance on peut utiliser la synchronisation bit : Des bits
de synchronisation sont inclus dans le flot de donnees et le recepteur cale son horloge
sur les bits de synchronisation.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

3.8 Transmission parallele – Transmission serie 77
a) Commutation en multiplex temporel
0 0.005 0.01 0.015 0.02 0.025 0.03−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
m1(t)
m2(t)
t
b) Multiplexage temporel de deux signaux
Fig. 3.1 – Multiplexage temporel.
Horloge
Message
Code type NRZ
+V
−V
CERI Avignon Traitement du signal J.-P.Costa

78 Chapitre 3. Transmission numerique en bande de base
Horloge
Message
Manchester simple
+V
−V
Horloge
Manchester différentiel
Message
+V
−V
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

79
Quatrieme partie
Application
CERI Avignon Traitement du signal J.-P.Costa

80 Chapitre 1. Une application : L’ADSL
Chapitre 1 Une application : L’ADSL
Toutes informations contenues dans ce chapitre ont ete recueillies sur les sites suivants :
– http://igm.univ-mlv.fr/ duris/NTREZO/ADSL.pdf par les auteurs Fabrice AGU, Elodie
BERLIN, Nicolas PICARDAT,
– http://www.commentcamarche.net/technologies/adsl.php3,
– http://www.enssib.fr/autres-sites/dessid/dessid00/cv/gedyass.PDF
– http://reseauxtcpip.free.fr/docs/ADSL.htm
1.1 Introduction
1.1.1 La jeune Histoire d’Internet
En 1996 sur les quelques 130 000 serveurs recenses figurent les sources d’information les
plus diverses : Dessins animes, bandes dessinees, automobile, musique, films ou produits
diverses. D’innombrables bibliotheques d’images, de sons et de videos cohabitent avec les
theses scientifiques les plus savantes et les jeux de roles les plus debrides.
Mais comment une telle galaxie communicante a-t-elle vu le jour? Et surtout, comment a-t-
elle fait pour se developper aussi rapidement? Pour le savoir, il faut reprendre l’histoire a son
debut. En realite, Internet est ne il y a pres de trente ans et le principe sous-jacent (un reseau
d’ordinateurs communiquant librement entre eux) est ne d’une angoisse liee a la guerre
froide, au debut des annees 60. La Rand Corporation recoit une requete du gouvernement des
Etats-Unis : Serait-il possible de creer un systeme de communication infaillible entre toutes
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.1 Introduction 81
les bases disseminees dans le monde? Le cahier des charges impliquait de creer un modele qui
permette la transmission d’informations, meme en cas d’attaque nucleaire. L’architecture
informatique alors en vigueur (un puissant ordinateur central relie a des terminaux) etait
inadaptee car trop fragile. Le simple fait d’aneantir la source majeure d’information aurait
aneanti toute communication. La proposition remise en 1964 au Pentagone par les experts
Larry Roberts et Paul Baran definissait un modele remarquablement ingenieux. Chaque
ordinateur du reseau etant potentiellement vulnerable, la communication devait operer de
maniere a transcender cette faiblesse. L’idee de genie fut la suivante : Chaque message
echange entre deux points se verrait divise en plusieurs paquets, chacun d’entre eux portant
un numero et une adresse de destination. Ces paquets individuels pourraient voyager d’un
point a un autre en empruntant des itineraires divers. A l’arrivee ils seraient regroupes et
reordonnes afin de reconstituer le message d’origine. Si l’un d’eux manquait l’ordinateur
de destination le redemanderait, et le paquet suivrait automatiquement un autre chemin.
Il suffirait qu’un colis arrive a bon port pour qu’il puisse dire aux autres quel chemin
suivre... Grace a une telle methode de communication, baptisee Internet Protocol, il semblait
impossible de stopper un message transitant de Paris a San Francisco. Le concept propose
par la Rand Corporation a alors ete juge adequat pour creer l’architecture de communication
voulue par l’armee americaine puisque les premiers essais effectues au National Physical
Laboratory en Angleterre s’etaient reveles concluants.
Du Pentagone a l’universite
En decembre 1969, les quatre premiers ”noeuds” (ordinateurs) du reseau ont ete mis en place
sous l’egide du Pentagone, l’ensemble etant alors baptise Arpanet. Des 1972, il recensait 37
noeuds. En plus des militaires, savants et chercheurs ont commence a se connecter au reseau,
trop heureux de pouvoir - a partir d’Arpanet - exploiter les ressources d’un ordinateur
eloigne. Et rapidement, le reseau s’est vu detourne a des fins plus pratiques. Les utilisateurs
ont tout naturellement pris gout au courrier electronique, Arpanet facilitant l’echange de
theses et de rapports, et plus generalement d’informations entre confreres. La messagerie
est tres tot devenue la premiere utilisation du reseau. Le systeme des listes, permettant de
diffuser le meme message a un grand nombre d’utilisateurs concernes par un sujet, est ne
a peu pres a la meme epoque... Et l’une des premieres listes, SF-Lovers, etait dediee aux
CERI Avignon Traitement du signal J.-P.Costa

82 Chapitre 1. Une application : L’ADSL
amateurs de science fiction. Du fait de sa facilite d’adaptation a divers types de machines,
Arpanet a connu une croissance continue. Au milieu des annees 70, des universitaires ont
invente un standard de communication inter-reseau qu’ils ont baptise TCP/IP (Transmission
Control Protocol/Internet Protocol). TCP/IP etant diffuse gratuitement, de nombreux
laboratoires et universites deciderent de l’adopter, afin de faciliter la liaison entre leurs
reseaux respectifs. La popularite de TCP/IP fut telle qu’Arpanet l’adopta aussi... L’armee
americaine a alors juge la situation suffisamment preoccupante pour desolidariser des 1977
la partie militaire du lot. Et le reseau a peu a peu ete rebaptise par ses utilisateurs sous le
nom d’Internet. A partir de 1984, plusieurs agences gouvernementales se sont connectees au
reseau, ouvrant ainsi a tous leurs gigantesques bases de donnees : la NSF (National Science
Foundation), la NASA ou certains ministeres. Des universites du monde entier ont a leur
tour rejoint cette communaute virtuelle. A la fin des annees 80, Internet etait compose de
plusieurs dizaines de milliers de noeuds raccordant trois a quatre millions d’utilisateurs,
essentiellement issus du monde scientifique et universitaire. Le destin d’Internet va prendre
une nouvelle tournure en 1991, lorsque Tim Berners-Lee, un informaticien du CERN (Centre
europeen de recherche nucleaire, situe a Geneve) developpe le World Wide Web (litteralement :
Toile d’araignee mondiale). Grace a ce systeme, il devient possible de creer tres aisement
des ”pages” d’informations standardisees, et de creer des liens entre les divers serveurs
d’Internet. Pour ce faire, il suffit d’utiliser un langage simple concu par Berners-Lee : l’HTML.
La communaute Internet accueille le World Wide Web (alias WWW) avec le plus vif interet.
Les principaux serveurs decident de presenter desormais leurs informations sous forme de
pages ecrites en HTML. L’apparition du WWW est une etape majeure, car tout utilisateur
peut desormais consulter les informations d’Internet sans avoir a connaıtre la moindre
commande informatique. Toutefois, pour qu’Internet puisse etre accessible au grand public,
il manque encore un logiciel qui permettrait de naviguer sur le WWW par le biais d’une
interface graphique a la Macintosh/Windows. C’est un etudiant de 21 ans de l’Universite
de l’Illinois, Marc Andreessen, qui va prendre cette initiative, sans aucune arriere-pensee
commerciale. Le logiciel Mosaıc sort en janvier 1993 et, de par sa diffusion gratuite, se voit
adopte par la majorite des utilisateurs de systemes tels que Macintosh ou Windows. En
parallele, Al Gore, vice-president des USA, cite le reseau Internet comme un modele des
fameuses autoroutes de l’information censees relier demain chaque foyer americain. Comme
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.2 La connexion a Internet 83
il suffit de posseder un ordinateur et un modem pour se brancher, le grand public est
pris d’une soudaine frenesie de connexion. Il decouvre alors une masse d’informations si
variees que sa curiosite le pousse irresistiblement a rester connecte. En fait, on y trouve
tout et n’importe quoi : des oeuvres de Shakespeare aux clips des Rolling Stones, et de
l’Encyclopedia Britannica en version integrale aux reproductions des toiles de Dali...
1994, l’annee du plebiscite
La veritable explosion va se produire l’annee suivante, a la faveur de trois phenomenes. En
mars 1994, le reseau prive America Online - qui regroupe deja plus d’un million d’abonnes
- ouvre un acces a Internet. Presque immediatement, six cent mille curieux debarquent sur
les forums et sur le World Wide Web. Et comme les medias se font l’echo des merveilles
d’Internet, un grand nombre de societes apparaissent de part et d’autre de l’Atlantique,
afin d’offrir un acces Internet pour un tarif mensuel aux alentours de 200 francs. Certaines
enquetes evaluent alors le nombre d’utilisateurs a trente millions de par le monde... En
avril 1994, Jim Clarke quitte la presidence de Silicon Graphics et s’en vient solliciter
la collaboration de Marc Andreessen pour creer une version evoluee de Mosaıc. Baptise
Netscape Navigator, ce nouveau logiciel, diffuse des l’automne 1994, acheve de populariser
Internet aupres du grand public. La publicite fait son entree sur le Web l’annee suivante,
consacrant du meme coup le reseau comme un nouveau vehicule d’informations incontournable
a l’aube du XXleme siecle. Les ”veterans” d’Internet n’ont pas toujours vecu avec bonheur
cette intrusion du grand public sur leur reseau, les temps de reponse ayant largement souffert
de cette soudaine montee d’affluence. Mais que l’on regrette ou non une telle evolution,
Internet est devenu une realite que personne ne peut ignorer.
1.2 La connexion a Internet
Maintenant que nous avons vu ce qu’est Internet, nous allons essayer de voir plus precisement
comment on peut s’y connecter. Le moyen le plus simple bien sur est d’utiliser un modem
V90 (55,6Kbps) que l’on branche a sa ligne telephonique pour se connecter au web. Avant
l’arrivee des technologies xDSL, cette solution apportait de nombreux avantages mais aussi
quelques inconvenients.
CERI Avignon Traitement du signal J.-P.Costa

84 Chapitre 1. Une application : L’ADSL
1.2.1 Les avantages
L’utilisation des modems V90 (55,6Kbps) pour acceder a Internet offre de nombreux avantages :
– Les lignes telephoniques sont deja installees dans la plupart des batiments, ce qui
ne necessite aucun travail particulier, donc aucun frais de ce point de vue pour
l’utilisateur.
– Les frais se limitent en fait a l’achat du modem, au paiement des communications
telephoniques, et eventuellement au paiement d’un abonnement a Internet. Cette
facilite d’installation et ce cout reduit ont fait le succes de cette formule.
1.2.2 Les inconvenients
Il existe cependant plusieurs inconvenients :
– Le debit de l’information est peu eleve (55,6Kbps au maximum en debit theorique)
– On ne peut pas telephoner et se connecter a Internet en meme temps puisque la ligne
telephonique est utilisee dans sa globalite pour acceder a Internet.
– Le cout des communications peut devenir tres eleve si le temps de connexion est
important. Pour palier a ces inconvenients, plusieurs systemes ont ete imagines dont
les technologies xDSL et parmi celles-ci l’ADSL.
Fig. 1.1 – Les inconvenients
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.3 Les technologies xDSL 85
1.2.3 L’evolution
Le rapide developpement des technologies de l’information a fait apparaıtre de nouveaux
services gourmands en capacite de transmission. L’acces rapide a Internet, la visioconference,
l’interconnexion des reseaux, le teletravail, la distribution de programmes TV, etc font
parties de ces nouveaux services multimedia que l’usager desire obtenir a domicile ou au
bureau. Jusqu’a present les services a hauts debits existant comme le cable coaxial ou la fibre
optique n’etaient pas bien adapte aux besoins reels. En effet, remplacer ou meme installer
des fibres optiques coutent tres chers et une connexion en cable coaxial n’est pas toujours
tres stable. L’idee d’utiliser la paire torsadee semble donc la mieux adaptee puisque dans le
monde plus de 800 millions de connexions de ce type sont deja en place et qu’il suffit d’ajouter
un equipement au central telephonique ainsi qu’une petite installation chez l’utilisateur pour
pouvoir acceder a l’ADSL.
1.3 Les technologies xDSL
1.3.1 Deux grandes familles
Le terme DSL ou xDSL signifie Digital Subscriber Line (Ligne numerique d’abonne) et
regroupe l’ensemble des technologies mises en place pour un transport numerique de l’information
sur une simple ligne de raccordement telephonique. Les technologies xDSL sont divisees
en deux grandes familles, celle utilisant une transmission symetrique et celle utilisant une
transmission asymetrique. Ces deux familles seront decrites plus loin dans ce support.
Fig. 1.2 – La technologie DSL
CERI Avignon Traitement du signal J.-P.Costa

86 Chapitre 1. Une application : L’ADSL
Les solutions symetriques
Les solutions symetriques La connexion s’effectue au travers de paires torsadees avec un
debit identique en flux montant (upstream) comme en flux descendant (downstream).
Les solutions asymetriques
En etudiant differents cas de figure, on s’est apercu qu’il etait possible de transmettre
les donnees plus rapidement d’un central vers un utilisateur mais que lorsque l’utilisateur
envoie des informations vers le central, ceux-ci sont plus sensibles aux bruits causes par des
perturbations electromagnetiques car plus on se rapproche du central, plus la concentration
de cable augmente et donc ces derniers generent plus de diaphonie 1. L’idee est d’utiliser un
systeme asymetrique, en imposant un debit plus faible de l’abonne vers le central.
Ce systeme permet donc de faire coexister sur une meme ligne un canal descendant (downstream)
de haut debit, un canal montant (upstream) moyen debit ainsi qu’un canal de telephonie
(appele POTS en telecommunications qui signifie : Plain Old Telephone Service).
1.3.2 Description des differentes technologies
Les technologies DSL, sont connues depuis une dizaine d’annees. Elles reposent sur une
optimisation des installations telephoniques existantes et permettent la transmission d’informations
numeriques, a haut debit, sur le fil telephonique. Elles supposent une modification du
repartiteur telephonique (et donc un investissement pour l’operateur) ainsi que l’installation
d’un modem specifique chez l’abonne.
HDSL (High bit rate DSL)
Cette technologie est la premiere technique issue de DSL et a vu le jour au debut des annees
1990. Cette technique consiste a diviser le tronc numerique du reseau, T1 aux USA et E1
en Europe sur 2 paires de fils pour T1 et 3 paires de fil pour E1. Avec cette technique, il
est possible d’atteindre un debit de 2Mbps dans les 2 sens sur trois paires torsadees et 1,5
Mbps dans les 2 sens sur deux paires torsadees. Il est possible que le debit, s’il est a 2 Mbps,
1. Brouillage d’une voie de transmission telephonique ou informatique par des signaux provenant d’autresvoies.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa
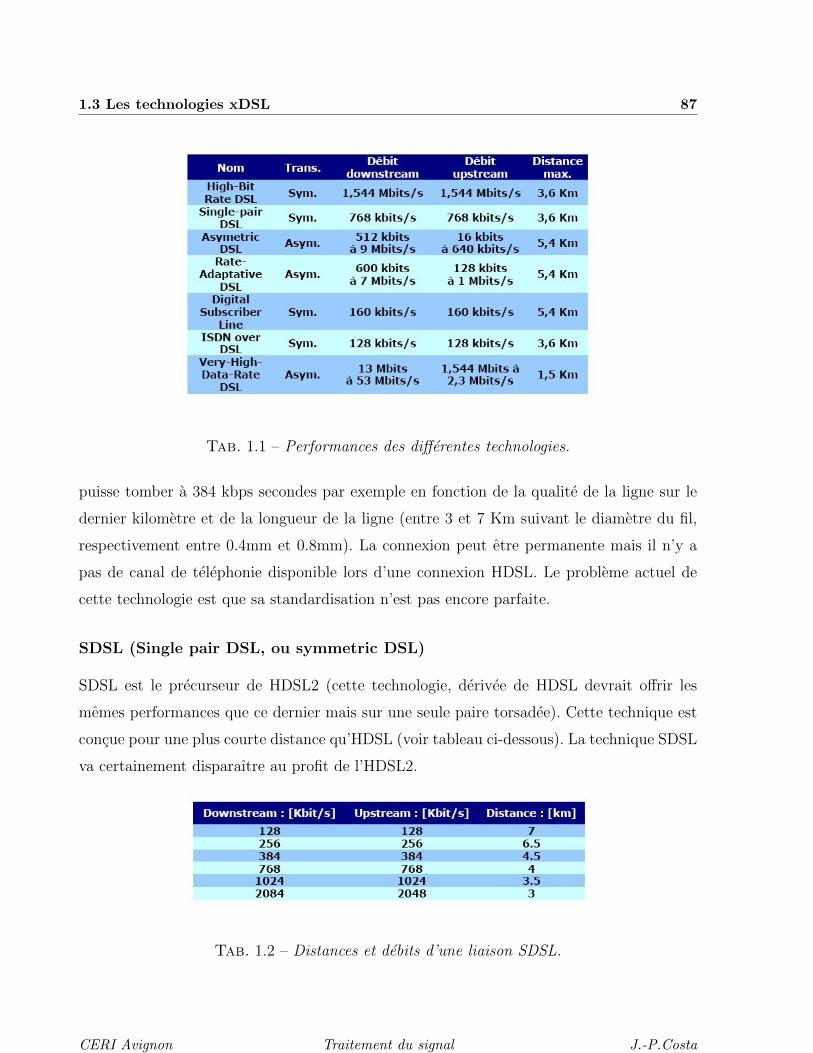
1.3 Les technologies xDSL 87
Tab. 1.1 – Performances des differentes technologies.
puisse tomber a 384 kbps secondes par exemple en fonction de la qualite de la ligne sur le
dernier kilometre et de la longueur de la ligne (entre 3 et 7 Km suivant le diametre du fil,
respectivement entre 0.4mm et 0.8mm). La connexion peut etre permanente mais il n’y a
pas de canal de telephonie disponible lors d’une connexion HDSL. Le probleme actuel de
cette technologie est que sa standardisation n’est pas encore parfaite.
SDSL (Single pair DSL, ou symmetric DSL)
SDSL est le precurseur de HDSL2 (cette technologie, derivee de HDSL devrait offrir les
memes performances que ce dernier mais sur une seule paire torsadee). Cette technique est
concue pour une plus courte distance qu’HDSL (voir tableau ci-dessous). La technique SDSL
va certainement disparaıtre au profit de l’HDSL2.
Tab. 1.2 – Distances et debits d’une liaison SDSL.
CERI Avignon Traitement du signal J.-P.Costa

88 Chapitre 1. Une application : L’ADSL
RADSL (Rate Adaptive DSL)
La technique RADSL est basee sur l’ADSL. La vitesse de transmission est fixee de maniere
automatique et dynamique en recherchant la vitesse maximale possible sur la ligne de
raccordement et en la readaptant en permanence et sans coupure. RADSL permettrait des
debits ascendants de 128kbps a 1Mbps et des debits descendants de 600kbps a 7Mbps, pour
une longueur maximale de boucle locale de 5,4 km. Le RADSL utilise la modulation DMT
(comme la plupart du temps pour l’ADSL). Il est en cours de normalisation par l’ANSI.
VDSL (Very High Bit Rate DSL)
VDSL est la plus rapide des technologies DSL et est basee sur le RADSL. Elle est capable
de supporter, sur une simple paire torsadee, des debits de 13 a 55.2 Mbps en downstream
et de 1,5 a 6 Mbps en upstream ou, si l’on veut en faire une connexion symetrique un
debit de 34Mbps dans les 2 sens. Donc il faut noter que VDSL est utilisable en connexion
asymetrique ou symetrique. VDSL a principalement ete developpe pour le transport de
l’ATM (Asynchronous Transfer Mode) a haut debit sur une courte distance (jusqu’a 1,5
Km). Le standard est en cours de normalisation. Pour le transport des donnees, l’equipement
VDSL est relie au central de raccordement par des fibres optiques formant des boucles SDH
a 155 Mbps, 622 Mbps ou 2,5 Gbps. Le transport de la voix entre l’equipement VDSL et le
central de raccordement peut egalement etre assure par des lignes de cuivre.
1.3.3 Conclusion
Avantages
Ces technologies presentent un triple avantage : la conservation de l’installation existante
(la paire de cuivre), un acces a Internet haut debit permanent et la possibilite (comme avec
le cable) de telephoner tout en surfant sur le Web. Le degroupage de la boucle locale, qui
consiste a donner un acces physique aux operateurs alternatif a la partie terminale du reseau
de l’operateur historique, devrait favoriser le deploiement de ces technologies en France. Le
VDSL (”V” pour very, tres grande vitesse), le HDSL (”H” pour high) et consorts annoncent
des debits tres prometteurs et seront, sans doute, reserves aux entreprises.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.4 L’ADSL 89
Inconvenients
Les technologies DSL presentent cependant trois inconvenients. D’une part, l’abonne ne
doit pas etre eloigne de plus de 5,4 Km de son central telephonique de rattachement (il
faut preciser que cette distance s’entend comme la distance reelle et non la distance a vol
d’oiseau). Cette technologie est donc reservee de fait a des zones d’habitat dense. D’autre
part le debit est directement dependant du trafic de la ligne, les debits sont tres variables, ce
qui en fait, en l’etat actuel du savoir-faire, une technologie destinee aux particuliers plutot
qu’aux entreprises. Enfin, les debits sont, pour les versions actuellement proposees sur le
marche, asymetriques, c’est-a-dire qu’elles sont bien adaptees a la consultation/reception de
donnees mais beaucoup moins a l’emission.
1.4 L’ADSL
1.4.1 Pourquoi l’ADSL
L’internaute, si son endroit d’habitation fait partie du reseau ADSL, peut aujourd’hui
beneficier de debits theoriquement dix fois superieurs aux debits obtenus avec le modem
classique (V90 a 56 kbits/s). Ces debits sont devenus parfois indispensables tant les sites
Internet sont de plus en plus ”lourds” a charger (a cause des animations notamment). De
plus, ils generent de surcroıt un confort d’utilisation non negligeable. L’ADSL, ”A” pour
Asymetric, developpee par le Centre national de recherche en telecommunications (Cnet,
aujourd’hui France Telecom R&D) fin 1970, fait partie de la famille des technologies DSL.
L’ADSL offre des debits theoriques de 512 Kb/s a 9 Mb/s en reception et de 16 Kb/s a 640
Kb/s en emission. ADSL signifie Asymetric Digital Subscriber Line soit en francais ligne
d’abonne numerique asymetrique. Le but de la technologie est d’augmenter les possibilites
de transmissions des lignes telephoniques afin qu’elles soient capables, en plus de la voix, de
vehiculer des donnees numeriques tres rapidement. Quand vous telephonez, vous n’utilisez
meme pas 10% des capacites des fils de cuivre de votre ligne telephonique. En effet, il reste
encore de la ”place” (de la bande de frequence) qui n’est absolument pas exploitee ! L’ADSL
utilise donc les 90 % restants pour vehiculer des donnees numeriques a grande vitesse.
CERI Avignon Traitement du signal J.-P.Costa

90 Chapitre 1. Une application : L’ADSL
Fig. 1.3 – Utilisation de la ligne telephonique.
1.4.2 Comment ca marche
L’ADSL permet d’utiliser toute la capacite des fils des lignes telephoniques en divisant la
liaison en 3 canaux bien distincts (c’est ce qu’on appelle le multiplexage).
Techniques de Multiplexage
a. FDM (Frequency Division Multiplexing)
FDM est une technique de multiplexage par repartition de frequence (MRF). Elle
est utilisee pour accroıtre les debits sur paires torsadees et plus particulierement
des lignes telephoniques. Le multiplexage frequentiel consiste a partager la bande de
frequences disponible en un certain nombre de canaux ou sous-bandes plus etroits et
a affecter en permanence chacun de ces canaux a un utilisateur ou a un usage exclusif.
L’organisation du groupe primaire ou groupe de base utilise en telephonie est basee
sur un multiplexage frequentiel. Ce dernier consiste a regrouper 12 voix telephoniques
de 4000 Hz chacune (3000 Hz utilisables plus 2 espaces inter-bandes de 500 Hz) ce qui
donne une largeur de bande de 48 kHz repartie entre 60 et 108 kHz (cf figure 1.4.2).
On trouve egalement un bon exemple de l’utilisation de FDM avec ADSL (Asynchronous
Digital Subscriber Line). ADSL est ne de l’observation qu’une ligne telephonique
possede une bande passante d’environ 1 Mhz dans laquelle seule, une largeur de
bande de 4 Khz est utilisee pour les communications telephoniques. Il reste donc
une bande passante importante disponible pour un autre usage. C’est un multiplexage
en frequence qui va permettre son utilisation. Une bande de 4 kHz est reservee pour
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.4 L’ADSL 91
Fig. 1.4 – Exemple de multiplexage frequentiel de trois canaux telephoniques.
la telephonie classique (POTS : Plain Old Telephone Service), une bande est reservee
pour le flux de donnees usager vers reseau (Upstream Data : Voie montante) et une
bande est reservee pour le flux de donnees reseau vers usager (Downstream Data :
Voie descendante). L’ensemble de la bande passante s’etend sur 1,1 MHz. La creation
de ces canaux est effectuee aux extremites des lignes telephoniques grace a des filtres
(Splitter).
Chez l’abonne, on procede a la pose de ces filtres destines a faire la difference entre la
voix et les donnees numeriques. Le splitter separe la bande passante reservee au service
telephonique grace a un filtre passe-bas (< 4kHz) de la bande passante utilisee pour
la transmission ADSL grace a un filtre passe-haut (> 25kHz). Il assure un decouplage
suffisant pour eviter que les signaux emis sur l’une des bandes frequences ne viennent
perturber le fonctionnement de l’autre.
A l’autre extremite de la ligne, chez l’operateur, on installe egalement un splitter. Son
filtre passe bas aiguille la voix vers un commutateur de circuits. Son filtre passe haut est
relie a un modem, qui reconstitue les donnees numeriques (DSLAM). Celui-ci regroupe
le trafic issu de plusieurs lignes d’usagers sur une meme ligne a haut debit. Le DSLAM
(Digital Subscriber Line Access Multiplexer) est un equipement generalement installe
dans les centraux telephoniques assurant le multiplexage des flux ATM vers le reseau
CERI Avignon Traitement du signal J.-P.Costa

92 Chapitre 1. Une application : L’ADSL
Fig. 1.5 – Liaison ADSL.
de transport. Cet element n’accueille pas seulement des cartes ADSL mais peut aussi
accueillir differents services DSL tels que SDSL ou HDSL en y inserant les cartes de
multiplexage correspondantes. Chaque carte supporte plusieurs modems ADSL. Les
elements regroupes dans le DSLAM sont appeles ATU-C (ADSL Transceiver Unit,
Central office end). En fait tous les services disponibles sur le reseau (Internet, LAN-
WAN, Teleshopping, Video MPEG) arrivent vers une station DSLAM pour etre ensuite
redistribues vers les utilisateurs. La maintenance et la configuration du DSLAM et des
equipements ADSL est effectuee a distance.
b. TDM (Time Division Multiplexing)
Le multiplexage TDM permet de regrouper plusieurs canaux de communications a bas
debits sur un seul canal a debit plus eleve.
On retrouve ce type d’utilisation sur les canaux T1 aux Etats-Unis qui regroupent
par multiplexage temporel 24 voies a 64 kbit/s en une voie a 1,544 Mbit/s ou sur les
canaux E1 en Europe qui regroupent 30 voies analogiques en une voie a 2,048 Mbit/s.
Les canaux T1 ou E1 peuvent etre multiplexes entre eux pour former des canaux a
plus hauts debits, etc. Cette hierarchie des debits est appelee hierarchie numerique
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.4 L’ADSL 93
Fig. 1.6 – Separation du telephone et des donnees chez l’usager en ADSL.
Fig. 1.7 – Schema de principe d’un multiplexage a repartition dans le temps.
plesiochrone ou PDH (Plesiochronous Digital Hierarchy).
Cette technique presente toutefois un inconvenient dans le cas de PDH. L’acces ou
l’insertion d’une information dans un canal E4 oblige a demultiplexer l’ensemble du
train numerique. De meme les technologies SONET (Synchronous Optical NETwork)
et SDH (Synchronous Digital Hierarchy) utilisees comme techniques de transport
dans les reseaux telephoniques des grands operateurs pratiquent un multiplexage
temporel pour assembler plusieurs lignes en une seule ligne de debit superieur. Le
multiplexage TDM peut etre utilise indifferemment sur paire torsadee ou fibre optique,
il est independant du media de transmission.
Techniques de modulation
a. DMT (Discret Multi Tone)
DMT est une technique de modulation utilisee dans certaines technologies xDSL.
L’ANSI (American Standards Institute) a defini la modulation de type DMT dans sa
CERI Avignon Traitement du signal J.-P.Costa
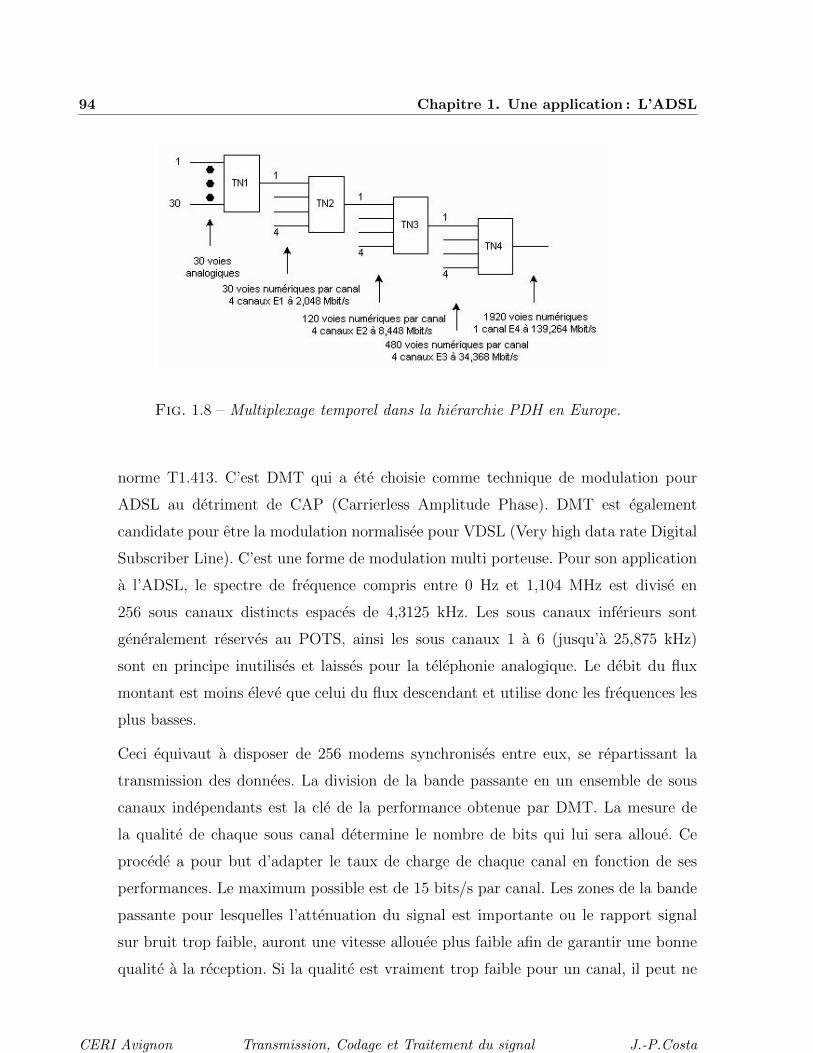
94 Chapitre 1. Une application : L’ADSL
Fig. 1.8 – Multiplexage temporel dans la hierarchie PDH en Europe.
norme T1.413. C’est DMT qui a ete choisie comme technique de modulation pour
ADSL au detriment de CAP (Carrierless Amplitude Phase). DMT est egalement
candidate pour etre la modulation normalisee pour VDSL (Very high data rate Digital
Subscriber Line). C’est une forme de modulation multi porteuse. Pour son application
a l’ADSL, le spectre de frequence compris entre 0 Hz et 1,104 MHz est divise en
256 sous canaux distincts espaces de 4,3125 kHz. Les sous canaux inferieurs sont
generalement reserves au POTS, ainsi les sous canaux 1 a 6 (jusqu’a 25,875 kHz)
sont en principe inutilises et laisses pour la telephonie analogique. Le debit du flux
montant est moins eleve que celui du flux descendant et utilise donc les frequences les
plus basses.
Ceci equivaut a disposer de 256 modems synchronises entre eux, se repartissant la
transmission des donnees. La division de la bande passante en un ensemble de sous
canaux independants est la cle de la performance obtenue par DMT. La mesure de
la qualite de chaque sous canal determine le nombre de bits qui lui sera alloue. Ce
procede a pour but d’adapter le taux de charge de chaque canal en fonction de ses
performances. Le maximum possible est de 15 bits/s par canal. Les zones de la bande
passante pour lesquelles l’attenuation du signal est importante ou le rapport signal
sur bruit trop faible, auront une vitesse allouee plus faible afin de garantir une bonne
qualite a la reception. Si la qualite est vraiment trop faible pour un canal, il peut ne
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.4 L’ADSL 95
Fig. 1.9 – Utilisation de la bande passante par DMT.
pas etre utilise. Pour calculer le debit, on utilise la formule suivante :
Debit total
=
Nb de canaux × Nb de bits/intervalle de modulation × Vitesse de modulation
Selon la norme T1.413, seuls les sous canaux 1 a 31 peuvent etre utilises pour le debit
upstream. Les sous canaux 1 a 6 sont utilises pour la telephonie, les sous canaux 7 a
31 pour le flux montant, le sous canal 32 est reserve, les sous canaux 33 a 256 sont
utilises pour les flux descendants. A noter que les sous canaux 16 et 64 sont utilises
pour transporter un signal ”pilote” et que les canaux 250 a 256 sont utilisables que
sur des lignes de raccordement de faible longueur.
Au dessus de 1 MHz, les perturbations sont trop grandes pour permettre un flux stable.
Dans ce cas, DMT utilise la technique d’annulation d’echo sur ces sous canaux ce qui
CERI Avignon Traitement du signal J.-P.Costa

96 Chapitre 1. Une application : L’ADSL
Fig. 1.10 – La separation des canaux en DMT.
resulte un flux en duplex sur les sous canaux 7 a 31. Si DMT avait applique FDM,
seuls les sous canaux superieurs (33 a 256) seraient utilises pour le downstream.
Les debits upstream et downstream sont separes soit par EC (Echo Cancelling) qui
permet d’utiliser les sous canaux inferieurs (de 1 a 31) pour le downstream et le
upstream ou soit par FDM (Frequency Division Multiplexing), qui est le plus utilise en
raison de sa simplicite et son faible cout, qui separe les sous canaux upstream/downstream
par un filtre passif. L’ajustement du debit par canal est constant. Si la qualite se
degrade sur un canal en cours de transmission, le systeme peut diminuer le nombre de
bits alloues sur ce canal, et les repartir sur d’autres.
Fig. 1.11 – Ajustement des debits par canaux en cours de transmission.
Cette possibilite d’ajustement a la qualite de la ligne en fait une technologie particulierement
adaptee au reseau telephonique commute dont la qualite peut etre tres inegale suivant
les localisations geographiques. DMT a ete retenu en 1993 par l’ANSI, le standard
T1.413 a ete finalise en 1995, l’UIT a confirme le choix de DMT pour son standard
ADSL en 1998. Malgre cet effort de normalisation, ADSL etait encore peu deploye.
L’usage initialement prevu de l’ADSL, a savoir la diffusion de video a la demande a
ete fortement concurrencee par les operateurs cable ou satellite. Une nouvelle cible est
apparue pour ADSL : l’acces a Internet. Mais pour seduire operateurs et utilisateurs,
il fallait un produit moins couteux et plus simple a installer. Comme par ailleurs
les debits necessaires pour un acces a Internet sont moindres que ceux necessaires
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.4 L’ADSL 97
a de la video, une nouvelle version d’ADSL a vu le jour : ADSL Lite. Adsl Lite
fait l’objet de la recommandation G.992.2 de l’UIT. Il reste base sur DMT, mais
utilise 127 sous-canaux, reduisant la bande totale a 550 kHz au lieu de 1,1 Mhz.
Les debits offerts sont de 1,5 Mbit/s en reception et 512 kbit/s en emission. Le
procede utilise pour la mise en oeuvre de DMT s’apparente a celui utilise par COFDM
(Coded Orthogonal Frequency Division Multiplexing). Il s’agit de la technique de
multiplexage adoptee par la norme de radiodiffusion numerique DAB (Digital Audio
Broadband). Comme nous l’avons vu, un equipement ADSL doit etre en mesure de
moduler ou demoduler jusqu’a 256 porteuses. L’utilisation de la technologie mise en
oeuvre pour le multiplexage FDM classique n’est pas envisageable techniquement sur
un si grand nombre de porteuses. Les concepteurs du processus de modulation COFDM
ont tourne la difficulte par l’utilisation d’une transformee de Fourier inverse. D’un
point de vue pratique, la necessite d’operer tres vite, en temps reel, conduit a utiliser
une FFT (Fast Fourier Transform = transformee de Fourier rapide) travaillant en
numerique, suivant des algorithmes tres performants. L’une des caracteristiques du
procede COFDM est l’utilisation des transmissions ” massivement paralleles ” dans
le domaine des frequences. L’information a transmettre est repartie sur un nombre
tres eleve de porteuses adjacentes. Ces porteuses ne sont pas issues de generateurs
ayant une existence concrete, comme dans tous les procedes classiques de modulation
numerique ou analogique, mais leur existence provient d’un artifice mathematique
utilisant une transformee de Fourier.
b. DWMT (Discrete Wavelet MultiTone )
DWMT est en cours de developpement pour des produits a haut debit, symetriques
ou asymetriques, de type VDSL. DWMT est une modulation dont le principe de
fonctionnement est proche de DMT. Elle s’appuie sur une base mathematique differente
de DMT qui est celle des transformees en ondelettes. Le codeur utilise une modulation
realisee par une transformee inverse rapide en ondelettes (IFWT : Inverse Fast Wavelet
Transform). La demodulation est realisee par une transformee rapide en ondelettes
(FWT : Fast Wavelet Transform). Grace a cette technique, les sous-canaux peuvent
avoir un espacement moitie moindre que celui necessaire a DMT. Les
CERI Avignon Traitement du signal J.-P.Costa

98 Chapitre 1. Une application : L’ADSL
performances promises par DWMT semblent nettement superieures a celles affichees
par DMT. Neanmoins, sa complexite semble prohibitive. D’avantage de travaux de
recherche seront necessaires pour reduire sa complexite et envisager une implementation.
c. QAM
ou MAQ (Modulation d’Amplitude en Quadrature) La MAQ va associer des niveaux
d’amplitude et de phase pour fournir des symboles representatifs d’un certain nombre
de bits. On nomme constellation la representation graphique de ces symboles. On va
alors parler de 16-MAQ, 32-MAQ, . . . , 256-MAQ , . . . 32768-MAQ, ce qui correspond
a la possibilite de transmettre 16, 32,. . ., 256, . . ., 32768 symboles differents. Chaque
symbole represente log2 16, log2 32, . . ., log2 256, . . ., log2 32768, soit 4,5,. . .,8,. . .,15
bits.
Fig. 1.12 – Exemple de constellation 16-MAQ.
Le debit binaire D pour une voie de rapidite de modulation R et pouvant transmettre
N symboles (N=2 nombre de bits/symboles), aura pour valeur :
D = R log 2(N)
Soit dans le cas d’un 16384-MAQ a 14 bits par symbole sur le RTC : D=4000 x 14=
56000 bit/s
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.4 L’ADSL 99
La norme G.lite
La norme G.Lite, qui definit la version ”legere” de l’ADSL (encore appelee ”Universal
ADSL”, ”splitterless ADSL”, ou ”lite ADSL”) permet :
– de fixer les debits : 1.5 Mbps dans le sens descendant, et 384 Kbps dans le sens
montant.
– D’integrer le splitter au modem (splitterless ADSL).
– D’imposer un modem auto-configurable (Plug and Play).
– De choisir le procede de modulation DMT (Discrete MultiTone), de preference
au procede CAP (Carrierless Amplitude and Phase).
1.4.3 Performances et limites
Les debits maximaux que nous avons evoques precedemment ne sont en realite que ”theoriques”.
De plus, les particuliers n’ont acces qu’a une version simplifiee de l’ADSL (ADSL Lite) qui
ne permet que des vitesses de 1 024 kbits/s pour les debits appeles descendants et de 128
kbits/s (parfois 256) pour les debits montants. Ces debits paraissent faibles par rapport a
ceux mentionnes en theorie mais ils sont quand meme environ dix fois superieurs que ceux
assures par le modem V90 (56 kbits/s). Plusieurs autres facteurs ont aussi une influence sur
les performances de l’ADSL :
– La longueur maximale d’une liaison entre un abonne et le central aux normes ADSL
est de 5,4 km tres precisement mais les operateurs n’assurent les debits maximaux
de 512 kbits/s et de 128 kbits/s que si l’abonne est a moins de 2,7 km d’un central
telephonique.
– Ces debits sont volontairement limites par l’operateur pour que les personnes pres des
centraux telephoniques (dans les grandes villes) ne soient pas favorisees par rapport
aux personnes plus eloignees. Il faut en effet savoir que la performance de l’ADSL est
moindre avec la distance.
– La qualite de la ligne telephonique a aussi un role considerable. Si votre ligne ou une
partie de celle-ci est vieille ou endommagee, il vous sera impossible d’atteindre ces
debits.
CERI Avignon Traitement du signal J.-P.Costa

100 Chapitre 1. Une application : L’ADSL
– Pour atteindre le debit de 8 Mbits/s (meme si celui-ci n’est que theorique), il faudra
etre a moins d’un kilometre d’un central.
En fonction de la distance separant l’abonne de son central telephonique, les paires de cuivre
peuvent supporter des debits superieurs.
1.5 Conclusion ADSL ou Asymetric
Digital Subscriber Line designe l’utilisation de la ligne telephonique pour acceder a internet.
L’internaute, en surfant a haut debit, beneficie d’un transfert d’informations dix fois plus
rapide que les modems classiques. Cette technologie permet de profiter pleinement des
ressources offertes par Internet : jeux en reseau, chat, telechargements de MP3, Webcam...
Il reste encore deux freins au developpement de l’ADSL : son cout et sa disponibilite pour
les zones rurales.
La norme G.Lite, qui definit la version ”legere” de l’ADSL (encore appelee ”Universal
ADSL”, ”splitterless ADSL”, ou ”lite ADSL”), regle les principaux problemes :
Elle fixe les debits : 1.5 Mbps dans le sens descendant, et 384 Kbps dans le sens montant. Elle
integre le splitter au modem (splitterless ADSL). Elle impose un modem auto-configurable
(Plug and Play). Elle choisit le procede de modulation DMT (Discrete MultiTone), de
preference au procede CAP (Carrierless Amplitude and Phase).
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

101
Cinquieme partie
Etude des signaux discrets
CERI Avignon Traitement du signal J.-P.Costa

102 Chapitre 1. L’echantillonnage
Chapitre 1 L’echantillonnage
1.1 Notion d’echantillonnage
On appelle echantillonnage d’un signal analogique x(t) le fait de prelever regulierement (tous
les Te secondes) les valeurs x(k Te). Le signal x(k Te) est le signal echantillonne a la periode
d’echantillonnage Te. La frequence fe = 1Te
est appelee frequence d’echantillonnage.
Un signal echantillonne quantifie s’appelle un signal numerique. La quantification permet
de passer de valeurs continues en amplitude a des valeurs discretes. Un convertisseur A/N
(Analogique/Numerique) realise l’echantillonnage et la quantification d’un signal analogique
(continue en temps et en amplitude).
On va voir les conditions a respecter pour reconstituer le signal analogique a partir de ses
echantillons du signal echantillonne sans perte d’information.
La perte d’information est d’autant plus faible que la quantification est fine. L’erreur de
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
x(t)=sin(wt)
temps (t)
Signal analogique
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
x(kTe)=sin(wkTe)
temps (kTe)
Signal echantillonne
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Conversion en signal binaire
temps (kTe)
Conversion numerique
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.2 Echantillonnage parfait 103
quantification est modelise comme un bruit aleatoire,
x(kTe) = sq(kTe) + e(kTe)
1.2 Echantillonnage parfait
1.2.1 Definition
L’echantillonnage parfait est realise par la multiplication du signal analogique par un peigne
de dirac, c’est a dire, une suite de diracs separes par Te de poids 1 qui multiple le signal de
spectre [−B,B].
On definit le signal echantillonne xe(t) par :
xe(t) = x(t) Υ(t)
= x(t)+∞∑
k=−∞
δ(t− kTe)
=+∞∑
k=−∞
x(t) δ(t− kTe)
=+∞∑
k=−∞
x(kTe) δ(t− kTe)
On rappelle que la fonction Υ correspond au peigne de dirac et que
TF[Υ(t)] = Υ(f) = Fe
+∞∑k=−∞
δ(f − kFe)
alors Xe(f) s’ecrit
Xe(f) = X(f) ∗ Fe+∞∑
k=−∞
δ(f − kFe)
Xe(f) = Fe
+∞∑k=−∞
X(f − kFe)
CERI Avignon Traitement du signal J.-P.Costa

104 Chapitre 1. L’echantillonnage
Le spectre du signal echantillonne Xe(f) s’obtient en perodisant avec une periode Te = 1Fe
le
spectre X(f). Echantillonner dans le temps revient a periodiser dans l’espace des frequences.
Il y a un probleme lorsque Fe < 2B. En effet, dans ce cas il y a repliement des spectres ou
recouvrement ou ”aliasing”. Ceci implique qu’on ne peut plus reconstruire X(f) a partir
de Xe(f) et donc x(t) a partir de x(kTe). Dans le cas ou Fe ≥ 2B, pour obtenir X(f) a
partir de Xe(f), il suffit de filtrer xe(t) par un filtre passe bas ideal de reponse en frequences
H(f) = Te ΠFe(f) (h(t) = sinc(Fe t).
1.2.2 Theoreme d’echantillonnage en bande de base
Un signal x(t) d’energie finie dont le spectre est a support sur [−B,B] (signal en bande
de base) peut etre echantillonne tous les Te sans perte d’information a condition que le
frequence d’echantillonnage
Fe > 1Te≥ 2B
Sans perte d’information signifie qu’on peut reconstruire x(t) ∀ instant t, a partir de la suite
infinie des echantillons x(kTe). La frequence minimale d’echantillonnage Fe = 2B s’appelle
la frequence de Nyquist.
H(f) correspond a la reponse en frequence du filtre passe bas ideal,
y(t) = xe(t) ∗ h(t)
y(t) =+∞∑
k=−∞
x(kTe) δ(t− kTe) ∗ sinc(Fet)
y(t) =+∞∑
k=−∞
x(kTe) sinc (Fe(t− kTe))
Cette derniere equation correspond a la formule d’interpolation de Shannon.
1.3 Echantillonnage regulier
L’echantillonnage ideal n’est pas realisable mais l’echantillonnage regulier (ou par bloqueur
de duree τ) correspond au cas pratique.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.4 Filtre anti-repliement 105
xe(t) =+∞∑
k=−∞
x(kTe) Πτ (t− kTe)
xe(t) =+∞∑
k=−∞
x(kTe) δ(t− kTe) ∗ Πτ (t)
xe(t) = x(t)+∞∑
k=−∞
δ(t− kTe) ∗ Πτ (t)
Xe(f) = X(f) ∗
[Fe
+∞∑k=−∞
δ(f − kFe)
](τ sinc(τf))
Xe(f) = τFe sinc(fτ)+∞∑
k=−∞
X(f − kTe)
Pour retrouver le spectre X(f) on multiplie par un filtre passe bas ideal de largeur Fe et il
faut multiplier par l’inverse d’un sinc si on veut compenser et retrouver X(f).
1.4 Filtre anti-repliement
Pour de nombreux signaux physiques, X(f) n’est pas connu parfaitement. De plus, il
existe toujours un bruit de fond additionnel du au milieu de mesure (capteur, circuit
d’amplification). Donc, on effectue un filtrage passe bas appele prefiltrage du signal avant
son echantillonnage pour supprimer tout repliement spectral.
Si l’on desire observer le spectre d’un signal jusqu’a la frequence Fmax, il est souhaitable de
prendre une frequence d’echantillonnage Fe = nFmax avec n ≥ 2.
Un signal de TF a support borne a un support temporel infini donc on a besoin de tous
les echantillons de kTe de −∞ a +∞ afin de reconstruire le signal x(t). On ne peut pas
reconstruire en temps reel, il faudra le faire de facn approchee. En pratique pour transmettre
la parole par telephone on filtre entre [300Hz, 3400Hz], on echantillonne a 8000 Hz et on
quantifie sur 8 bits/echantillons ce qui correspond a 64000 b/s. Pour un compact disc avec
du son stereo on filtre entre [0 et 20 000 Hz], on echantillonne a 44,1 kHz.
CERI Avignon Traitement du signal J.-P.Costa

106 Chapitre 1. L’echantillonnage
1.5 Interpolation par le bloqueur d’ordre 0
Le probleme est de reconstituer x(t) a partir de ses echantillons x(kte). Une realisation
possible est le bloqueur d’ordre 0. La reconstitution a l’aide d’un bloqueur d’ordre 0 est
la plus employee car elle realisee par les convertisseurs N/A a l’entree desquels les valeurs
numeriques sont maintenues pendant la periode d’echantillonnage.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

107
Chapitre 2Signaux deterministes a
temps discret
On considere les signaux a temps discret comme des suites de nombres x(k) ∈ C avec
k ∈ Z. Ces signaux sont issus generalement de l’echantillonnage a la frequence fe = 1Te
de
signaux temporels x(t) analogiques et les nombres x(k) representent les echantillons x(kTe).
2.1 Signaux a temps discret elementaires
Impulsion unite
δ(k) = 1 si k = 0
= 0 si k 6= 0
Attention δ(k) ne doit pas etre confondu avec la distribution de dirac δ(t).
L’echelon unite
u(k) = 1 si k ≥ 0
= 0 si k < 0
La porte de longueur N
ΠN(k) = 1 si 0 ≤ k ≤ N/2− 1
= 0 si k ≥ N/2
CERI Avignon Traitement du signal J.-P.Costa

108 Chapitre 2. Signaux deterministes a temps discret
2.2 Proprietes des signaux a temps discret
Periodicite
Un signal x(k) est periodique de periode N ∈ N∗ si N est le plus petit entier tel que
x(k) = x(k +N) ∀ k
Energie
On definit l’energie par
Ex =+∞∑
k=−∞
|x(k)|2
Puissance moyenne
On definit la puissance moyenne par
Px = limN→∞
1
2N + 1
+N∑k=−N
|x(k)|2
Signaux a energie finie, a puissance moyenne finie
Si on a 0 < Ex <∞ alors Px = 0
Si on a 0 < Px <∞ alors Ex =∞
Fonction d’autocorrelation d’un signal
– a energie finie
Cxx(τ) =+∞∑
k=−∞
x(k)x∗(k − τ)
– a puissance moyenne finie
Cxx(τ) = limN→∞
1
2N + 1
+N∑k=−N
x(k)x∗(k − τ)
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

2.3 Transformee de Fourier des signaux a temps discret 109
– periodique
Cxx(τ) =1
T0
+T0/2∑k=−T0/2
x(k)x∗(k − τ)
Fonction d’intercorrelation
– a energie finie
Cxy(τ) =+∞∑
k=−∞
x(k)y∗(k − τ)
– a puissance moyenne finie
Cxy(τ) = limN→∞
1
2N + 1
+N/2∑k=−N/2
x(k)y∗(k − τ)
Produit de convolution
y(k) = x(k) ∗ h(k) = h(k) ∗ x(k) =+∞∑
u=−∞
h(u)x(k − u) =+∞∑
u=−∞
x(u)h(k − u)
2.3 Transformee de Fourier des signaux a temps discret
2.3.1 Definition
X(f) =+∞∑
k=−∞
x(k) e−j2πkf
X(f + 1) =+∞∑
k=−∞
x(k) e−j2πk(f+1)
X(f + 1) =+∞∑
k=−∞
x(k) e−j2πkf = X(f)
CERI Avignon Traitement du signal J.-P.Costa

110 Chapitre 2. Signaux deterministes a temps discret
Donc X(f) est periodique de periode 1. Les x(k) sont les coefficients de la serie de
Fourier de X(f) de periode 1,
x(k) =1
1
∫ 1/2
−1/2X(f) ej2πkfdf
L’intervalle [-1/2,1/2] est appele intervalle principal.
Attention le spectre X(f) du signal a temps discret x(k) est a la frequence continue et de
periode F0 = 1.
2.3.2 Exemple
Calcul de la TF de x(k) = ΠN(k),
X(f) =+∞∑
k=−∞
x(k) e−j2πkf
X(f) =N−1∑k=0
e−j2πkf
X(f) =1− e−j2pifN
1− e−j2πf
X(f) = e−jπf(N−1)sin(πfN)
sin(πf)
2.4 Proprietes de la transformee de Fourier
Linearite Z[ax(k) + by(k)] = aX(z) + bY (z)
Theoreme de la modulation TF[x(k) ej2πf0k] = X(f − f0)Relation de Parseval Ex =
∑+∞k=−∞ |x(k)|2 =
∫ 1/2
−1/2 |X(f)|2dfTF d’un produit TF[x(k)y(k)] =
∫ 1/2
−1/2X(f ′)Y (f − f ′)df ′
= X(f) ∗ Y (f)
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

2.5 Transformee de Fourier discrete d’un signal discret 111
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50
2
4
6
8
10
12
14
16
18
20
sin(pi f N)/sin(pi f)N sinc(N f)
2.5 Transformee de Fourier discrete d’un signal discret
La TF d’un signal discret est
X(f) = X(ej2πf ) =+∞∑
k=−∞
x(k) e−j2πkf
X(f) est periodique de periode 1. De plus, la TF inverse donne
∫ 1/2
−1/2X(f) ej2πfk df
Inconvenients : f varie de facon continue, on ne peut donc pas l’implanter sur un calculateur
numerique. Il faut une infinie de x(k). En pratique on peut :
1. prendre un nombre fini N dechantillons x(k) choisis de facon a conserver les valeurs
importantes du signal k = 0, . . . ,N − 1,
X(f) =N−1∑k=0
x(k)e−j2πkf
2. et discretiser la frequence f sur [0,1[. On choisit ∆ = 1/N , c’est a dire fn = n/N pour
n = 0, . . . ,N − 1.
CERI Avignon Traitement du signal J.-P.Costa

112 Chapitre 2. Signaux deterministes a temps discret
X(n
N) =
N−1∑k=0
x(k) e−j2πknN avec n = 0, . . . ,N − 1
On obtient ainsi N valeurs X(0),X(1/N), . . . ,X(N − 1/N) correspondant a la transformee
de Fourier discrete (TFD).
Par definition la TFD est une application lineaire qui a N valeurs complexes (x(0), . . . ,x(N−1)) associe N valeurs complexes (X0, . . . ,XN−1) et on note
Xn =N−1∑k=0
x(k) e−j2πknN avec n = 0, . . . ,N − 1
La suite Xn est une suite periodique de periode N .
La TFD inverse donne
x(k) =1
N
N−1∑n=0
Xn ej2πknN avec k = 0, . . . ,N − 1
2.5.1 Remarques
– La TFD represente les valeurs echantillonnees de la TF d’un signal discret de duree
finie, x0, . . . ,x(N − 1).
– Si x(k) n’est pas de duree finie, on a les valeurs echantillonnees de la TF du signal
discret x(k) ΠN(k), ΠN(k) etant le fenetre rectangulaire de longueur N . Ceci entraıne
des oscillations dans la TF et l’utilisation de fenetres de ponderation g(k) pour les
faire disparaıtre (Hamming, Hanning).
– La TFD ne represente les valeurs echantillonnees de la TF d’un signal a temps continu
x(t) que si x(t) est a duree limitee [0,NTe] et si sa TF X(f) a un spectre a bande
limitee [− 12Te, 12Te
]. Comme il n’existe pas de signaux a duree et a bande limitee, on
commet une erreur systematique en considerant les Xn comme des echantillons de la
TF X(f) .
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

2.6 Fenetres de ponderation 113
0 100 200 300 400 500 600 700 800 900 10000
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5TF pour N=256
Fréquence
N = 256
0 100 200 300 400 500 600 700 800 900 10000
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5TF pour N=260
Fréquence
N = 260
0 100 200 300 400 500 600 700 800 900 10000
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5TF pour N=266
Fréquence
N = 266
2.5.2 Exemple
On cherche a determiner la TFD Xn du signal
x(k) = A cos(2πf0fek)
Xn =N−1∑k=0
x(k) e−j2πknN avec n = 0, . . . ,N − 1
Signal reel −→ le module du spectre est une fonction paire
Signal echantillonnee −→ le module du spectre est une fonction periodique (fe)
TFD −→ frequences discretes
−→ Signal a support borne
multiplication en temps=convolution en frequence
2.6 Fenetres de ponderation
Nous allons dans ce paragraphe, decrire plusieurs fenetres de ponderation, en montrer les
avantages et leur limites.
Bien que ce ne soit pas une regle generale, dans ce paragraphe, les fenetres etudiees seront
placees symetriquement autour de l’origine pour simplifier les calculs. Les resultats etablis
dans ce cas pourront etre modifies aisement pour d’autres positions a l’aide du theoreme du
retard.
CERI Avignon Traitement du signal J.-P.Costa

114 Chapitre 2. Signaux deterministes a temps discret
80 90 100 110 120 130 140−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Temps
Fenêtre rectangulaire
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50
5
10
15
20
Fréquences
1/N
Module de la transformee de Fourier
80 90 100 110 120 130 140−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Temps
Fenêtre rectangulaire
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5−300
−250
−200
−150
−100
−50
0
50
Fréquences
Module de la transformee de Fourier en dB
2.6.1 Fenetre rectangulaire
La maniere brutale de limiter la duree d’un signal est de le multiplier par un signal rectangulaire
(fonction Porte), possedant N echantillons unites. Au niveau spectral cette multiplication
revient a convoluer la TF de x(t) par la TF de la fonction porte. Cette operation de
convolution a pour effet d’introduire des ondulations dans le spectre.
En regle generale la resolution en frequence sera d’autant meilleure que :
– le lobe principale (central) est etroit,
– les lobes secondaires (lateraux) sont bas.
Malheureusement la reduction en hauteur des lobes secondaires s’accompagne toujours de
l’elargissement du lobe principal. Il faut donc accepter un compromis entre ces deux effets.
2.6.2 Fenetre de Hamming
L’equation de la fenetre de Hamming est donne par la relation suivante pour α = 0.54 : w(k) = α + (1− α) cos(2πk/N)) pour |k| ≥ N/2
= 0 ailleurs(2.1)
Remarque
La fenetre de Hanning est obtenue pour α = 1/2 dans l’equation 2.1.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

2.6 Fenetres de ponderation 115
0 2 4 6 8 10 12 14 16 18 20−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Temps
Fenêtre de Hamming
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5−60
−40
−20
0
20
40
Fréquences
2.6.3 Fenetre de Kaiser
Une autre famille de fonctions fenetre a ete proposee par Kaiser. Elle permet selon la valeur
d’un parametre β, de specifier dans le domaine des frequences le compromis entre la largeur
de lobe principal et l’amplitude des lobes secondaires. Une caracteristique importante ce
cette famille de raffinee de fenetres est qu’il est possible d’obtenir de fortes attenuations
des lobes secondaires tout en conservant une largeur minimale pour la pic central. La forme
generale de cette fonction est la suivante : w(k) =I0[β√N2−4k2]
I0(βN)pour |k| ≥ N/2
= 0 ailleurs(2.2)
ou I0 est la fonction de Bessel de premiere espece d’ordre zeros et ou β caracterise l’echange
d’energie entre le pic central et les lobes secondaires. La largeur du pic central augmente
avec β.
2.6.4 Exemple
On genere un signal compose de deux sinusoıdes de frequence 200 et 400 Hz, echantillonne
a 8000 Hz et ayant 512 points. On calcule la TF de ce signal apres multiplication par
CERI Avignon Traitement du signal J.-P.Costa

116 Chapitre 2. Signaux deterministes a temps discret
0 2 4 6 8 10 12 14 16 18 200.6
0.7
0.8
0.9
1
1.1
Temps
Fenêtre de Kaiser
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5−60
−40
−20
0
20
40
Fréquences
β = 0.8
0 2 4 6 8 10 12 14 16 18 200.2
0.4
0.6
0.8
1
Temps
Fenêtre de Kaiser
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5−60
−40
−20
0
20
40
Fréquences
β = 2
une fenetre rectangulaire, de Hamming et de Kaiser. la resolution en frequence est donc
feN
= 16Hz.
2.7 La transformee de Fourier rapide
La transformee de Fourier rapide ou FFT (Fast Fourier Transform) est une technique de
calcul rapide de la TFD. L’algorithme de base, utilise un nombre de points N = 2p et son
gain en temps par rapport a un calcul direct est de l’ordre de N/log2(N). Pour N = 1024,
la FFT est donc environ 100 fois plus rapide.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

2.7 La transformee de Fourier rapide 117
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07−4
−3
−2
−1
0
1
2
3
4
5
x=2*cos(2*pi*200*t)+3*cos(2*pi*400*t)
Temps
0 100 200 300 400 500 600 700 800 900 10000
0.5
1
1.5
Fenêtre rectangulaire
Fréquences
0 100 200 300 400 500 600 700 800 900 10000
0.5
1
1.5
Fenêtre hamming
Fréquences
0 100 200 300 400 500 600 700 800 900 10000
0.5
1
1.5
Fenêtre kaiser
Fréquences
CERI Avignon Traitement du signal J.-P.Costa

118
Sixieme partie
Etude des signaux aleatoires
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

119
Chapitre 1 Rappels sur les probabilites
1.1 Introduction
Jusqu’a present, nous avons parle des signaux deterministes dans l’etude des systemes
lineaires invariant dans le temps, sans mentionner le role important que jouent les phenomenes
aleatoires en traitement du signal et plus particulierement en telecommunications.
En effet, le modele deterministe ne convient plus a expliquer tous les phenomenes qui peuvent
se produire dans une chaıne de transmission par exemple.
1.2 Probabilites
1.2.1 Definitions
Une experience est dite aleatoire si l’on ne peut prevoir son resultat, le lancer de des, le jeu
de pile ou face.
L’ensemble S de tous les resultats possibles d’une experience aleatoire est appele ”univers”
a cette experience. Chaque resultat d’un tirage aleatoire correspond a une epreuve. Un
ensemble d’epreuves constitue un ”evenement”. On dit qu’un evenement est lie a une
experience si pour tout resultat appartenant a S on sait dire si cet evenement a eu lieu
ou non. L’association de nombres reels aux evenements definis sur S constitue une mesure
de probabilite.
CERI Avignon Traitement du signal J.-P.Costa

120 Chapitre 1. Rappels sur les probabilites
1.2.2 Definitions complementaires
– le complementaire d’un evenement A, note A, est l’evenement constitue de l’ensemble
des elements de S qui n’appartient pas a A.
– L’union des evenements A et B, note A∪B est l’evenement constitue de des elements
qui appartiennent a A, a B, ou les deux a la fois.
– L’intersection des evenements A et B, notee A ∩ B, se compose de l’ensemble des
evenements qui appartiennent simultanement a A et B.
– L’evenement qui ne contient aucun element est dit evenement nul, note ∅.
– Deux evenements sont disjoints s’ils n’ont aucun point commun, c’est a dire si A∩B =
∅.
– Si tout point de A appartient a B, on dit que A est un sous-ensemble de B, et on le
note par A ⊂ B.
1.2.3 Algebre des evenements
– A ∪ A = S,
– A ∩ A = ∅,
– A ∩ S = A,
– (A ∪B) = A ∪B,
– (A ∩B) = A ∩B,
Les operations d’union et d’intersection possedent les proprietes suivantes :
– Commutativite : A ∪B = B ∪ A,A ∩B = B ∩ A.
– Associativite : A ∪ (B ∪ C) = (A ∪B) ∪ C, A ∩ (B ∩ C) = (A ∩B) ∩ C.
– Distributivite : A ∩ (B ∪ C) = (A ∩B) ∪ (A ∩ C), A ∪ (B ∩ C) = (A ∪B) ∩ (A ∪ C)
1.2.4 Probabilite d’un evenement
Definition classique
Une definition classique, postule que la probabilite d’un evenement A a pour expression :
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.2 Probabilites 121
P (A) =NA
N
ou N est le nombre de resultats possibles et NA le nombre de resultats faisant partie de
l’evenementA. Notons que dans cette definition, tous les resultats sont supposes equiprobables.
Definition axiomatique
La probabilite d’un evenement A, notee P (A), est un nombre reel associe a A qui satisfait
a l’ensemble des axiome suivants :
– Axiome 1 : P (A) ≥ 0
– Axiome 2 : P (S) = 1
– Axiome 3 : P (A ∪B) = P (A) + P (B) si A ∩B = ∅
A partir de ces trois axiomes, on peut etablir les proprietes suivantes, toutes tres interessantes :
– P (A) ≤ 1, il s’en suit que P (A) = 1− P (A),
– P (∅) = 0,
– P (A) ≤ P (B) si A ⊂ B,
– P (A ∪B) = P (A) + P (B)− P (A ∩B).
Probabilite conditionnelle
La probabilite conditionnelle d’un evenement A par rapport a l’evenement B, note P (A|B),
a pour definition :
P (A|B) =P (A ∩B)
P (B)(1.1)
ou P (B) 6= 0 et P (A ∩B) est la probabilite conjointe de A et B. On peut en deduire la loi
de Bayes :
P (B|A) =P (A|B)P (B)
P (A)(1.2)
ou P (B|A) est la probabilite conditionnelle de B par rapport a A.
CERI Avignon Traitement du signal J.-P.Costa

122 Chapitre 1. Rappels sur les probabilites
Evenements independants
Deux evenements A et B sont dits statistiquement independants si et seulement si :
P (A ∩B) = P (A)P (B)
alors l’equation 1.1 devient :
P (A|B) = P (A)
Soit A1,A2, . . . ,An un ensemble d’evenements definis sur S. Ces n evenements sont dits
mutuellement independants si et seulement si
P (Ai ∩ Aj) = P (Ai)P (Aj)
P (Ai ∩ Aj ∩ Ak) = P (Ai)P (Aj)P (Ak)
...
P (Ai ∩ Aj ∩ . . . ∩ Ak) = P (Ai)P (Aj) . . . P (An)
Probabilite totale
SoitN evenementsA1,A2, . . . ,AN mutuellement exclusifs constituant exhaustivement l’ensemble
S, c’est a dire verifiant les conditions suivantes :
Ai ∩ Aj = ∅ i 6= j = 1,2, . . . N
et
A1 ∪ A2 ∪ . . . ∪ AN = S
Soit B un evenement quelconque defini sur S. Alors :
P (B) =N∑k=1
P (B ∩ Ak) =N∑k=1
P (B|Ak)P (Ak)
que l’on appelle probabilite totale de l’evenement B.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.3 Variables aleatoires reelles 123
1.3 Variables aleatoires reelles
Une variable aleatoire (VA) X(λ) (en majuscule) est une fonction qui associe un nombre
reel, appele valeur x (en minuscule) de X(λ), a chaque epreuve λ de S en respectant les
conditions suivantes :
– L’ensemble {λ : X(λ) ≤ x} est un evenement pour tout nombre reel x.
– P{λ : X(λ) = −∞} = 0 et P (λ : X(λ) ≤ ∞) = 1
Si X ne peut prendre qu’un ensemble denombrable de valeurs distinctes, on dit que X est
une variable aleatoire discrete. Si X peut prendre une valeur quelconque sur un ou plusieurs
intervalles de la droite reelle, alors X est une variable aleatoire continue.
Le nombre d’appels telephoniques arrivant a un bureau est une variable aleatoire discrete,
alors que la date exacte de l’arrivee d’un de ces appels est une variable aleatoire continue.
1.3.1 Histogramme
Dans la majorite des cas, on peut associer a un evenement une mesure qui est un nombre
reel, par exemple une mesure de longueur ou de temperature. Pour caracteriser la variable,
on commence par decouper l’intervalle des reels en segments [xk,xk+1]. Puis, on effectue N
mesures et on construit un histogramme. Pour cela on compte le nombre de fois nk ou le
resultat de la mesure x appartient a chacun de ces segments. On tient compte du fait que
les segments couvrent l’axe des reels et sont disjoints et on definit la probabilite
proba(x ∈ [xk,xk+1[) = limN→∞
nkN
(1.3)
On reduit la taille des intervalles en faisant tendre leur nombre vers l’infini.
1.3.2 Fonction de repartition
On definit la fonction de repartition de la variable aleatoire X comme etant la probabilite
que X soit strictement inferieure a x :
FX(x) = P (X < x) pour tout x variant de −∞ a +∞ (1.4)
CERI Avignon Traitement du signal J.-P.Costa

124 Chapitre 1. Rappels sur les probabilites
−1.5 −1 −0.5 0 0.5 1 1.50
0.01
0.02
0.03
0.04
0.05
0.06
0.07
Valeurs de x
Nb d’occurences de x
Fig. 1.1 – Exemple d’histogramme
C’est une fonction non decroissante qui peut presenter des paliers et des discontinuites. Elle
tend vers 0 lorsque x→ −∞ et 1 lorsque x→ +∞.
Les proprietes de FX(x) sont les suivantes :
– FX(−∞) = 0,
– FX(∞) = 1,
– 0 ≤ FX(x) ≤ 1,
– FX(x1) ≤ FX(x2) si x1 ≤ x2,
– P{x1 < X ≤ x2} = FX(x2)− FX(x1).
Exemples
Le premier exemple correspond a la fonction de repartition d’un signal de type gaussien.
Le second exemple consiste a etudier le lancer de de (6 faces). La variable aleatoire est une
variable aleatoire discrete et si le de n’est pas truque on a
FX(x) =6∑i=1
P (xi)u(x− xi)
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.3 Variables aleatoires reelles 125
−1.5 −1 −0.5 0 0.5 1 1.50
0.02
0.04
0.06
0.08
0.1
0.12
0.14
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
valeur de x
Fonction de répartition
soit
−2 −1 0 1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Fonction de répartition pour le lancer de dé
1.3.3 Densite de probabilite
La probabilite que x appartienne a l’intervalle [xk,xk + dx[ est
CERI Avignon Traitement du signal J.-P.Costa

126 Chapitre 1. Rappels sur les probabilites
proba(x ∈ [xk,xk + dx[) = dFX(x)
proba(x ∈ [xk,xk + dx[) = pX(x)dx
avec FX(x) differentiable et pX(x) correspond a la densite de probabilite (ddp) de la variable
aleatoire X et a donc pour definition :
pX(x) =dFX(x)
dx(1.5)
C’est une fonction non negative, mais ce n’est pas une probabilite, elle n’est pas
necessairement inferieur a un.
les proprietes de pX(x) sont les suivantes :
– pX(x) ≥ 0,
–∫ +∞−∞ pX(x)dx = 1,
– FX(x) =∫ x−∞ pX(ε)dε,
– P{x1 < X ≤ x2} =∫ x2x1pX(x)dx
Dans le cas d’une variable aleatoire discrete, on a :
pX(x) =∑i
P (xi)δ(x− xi) (1.6)
On peut estimer la densite de probabilite en construisant un histogramme pour lequel le
pas d’echantillonnage de l’axe des reels est infiniment grand. Dans l’exemple de la figure
suivante, le nombre d’echantillons est de 1000, 10000 et enfin 100000.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa
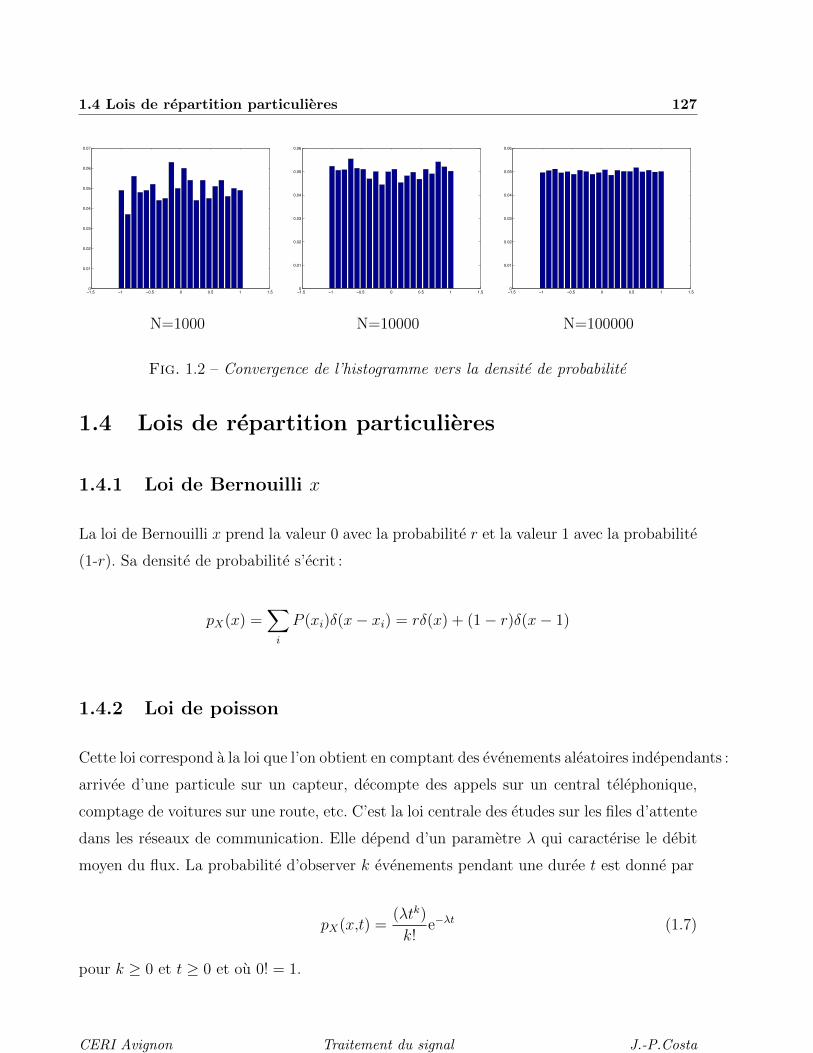
1.4 Lois de repartition particulieres 127
−1.5 −1 −0.5 0 0.5 1 1.50
0.01
0.02
0.03
0.04
0.05
0.06
0.07
N=1000
−1.5 −1 −0.5 0 0.5 1 1.50
0.01
0.02
0.03
0.04
0.05
0.06
N=10000
−1.5 −1 −0.5 0 0.5 1 1.50
0.01
0.02
0.03
0.04
0.05
0.06
N=100000
Fig. 1.2 – Convergence de l’histogramme vers la densite de probabilite
1.4 Lois de repartition particulieres
1.4.1 Loi de Bernouilli x
La loi de Bernouilli x prend la valeur 0 avec la probabilite r et la valeur 1 avec la probabilite
(1-r). Sa densite de probabilite s’ecrit :
pX(x) =∑i
P (xi)δ(x− xi) = rδ(x) + (1− r)δ(x− 1)
1.4.2 Loi de poisson
Cette loi correspond a la loi que l’on obtient en comptant des evenements aleatoires independants :
arrivee d’une particule sur un capteur, decompte des appels sur un central telephonique,
comptage de voitures sur une route, etc. C’est la loi centrale des etudes sur les files d’attente
dans les reseaux de communication. Elle depend d’un parametre λ qui caracterise le debit
moyen du flux. La probabilite d’observer k evenements pendant une duree t est donne par
pX(x,t) =(λtk)
k!e−λt (1.7)
pour k ≥ 0 et t ≥ 0 et ou 0! = 1.
CERI Avignon Traitement du signal J.-P.Costa

128 Chapitre 1. Rappels sur les probabilites
0 0.5 1 1.5 2 2.5 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Densité de probabilité
k=0
k=1
k=2
k=3
k=4
t
Fig. 1.3 – Densite de probabilite p(k,t) de la loi de poisson
1.4.3 Loi uniforme
On dit qu’une variable aleatoire X suit une loi uniforme si elle prend ses valeurs uniquement
dans l’intervalle [a,b[ et que sa densite de probabilite vaut
pX(x) =1
b− a(1.8)
En effet, la densite de probabilite correspond est une constante dans l’intervalle [a,b[.
∫ +∞
−∞pX(x) dx = 1∫ b
a
pX dx = 1
pX =1
b− a
Sa fonction de repartition est composee de 3 segments de droites.
– Pour x < a, pX(x) = 0 donc FX(x) = 0,
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.4 Lois de repartition particulieres 129
– pour [a,b[,
FX(x) =
∫ x
−∞pX(u)du
FX(x) =
∫ x
a
1
b− adu
FX(x) =x− ab− a
– pour x ≥ b, FX(x) = 1
−3 −2 −1 0 1 2 3−0.2
0
0.2
0.4
0.6
x
Densité de probabilité
−3 −2 −1 0 1 2 3−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Fonction de répartition
x
a=−0.5
a=−0.5
b=1.5
b=1.5
Fig. 1.4 – Loi uniforme
1.4.4 Loi normale ou gaussienne
On dit qu’une variable aleatoire X suit une loi normale si sa densite de probabilite a pour
expression :
pX(x) =1
σx√
2πe− (x−mx)2
2σ2x (1.9)
La densite de probabilite passe par son maximum pour x = mx. Cette loi presente plusieurs
caracteristiques importantes :
– Cette loi joue un role fondamental dans l’etude des phenomenes aleatoires que l’on
CERI Avignon Traitement du signal J.-P.Costa

130 Chapitre 1. Rappels sur les probabilites
rencontre dans les systemes physiques. La plupart des processus aleatoires naturels
sont pratiquement gaussiens. De plus, d’apres le theoreme central limite (cf paragraphe
1.8), la somme d’un grand nombre de variables aleatoires, sous certaines conditions
suit une loi normale.
– Tout l’information est donnee directement par la moyenne mx et la variance σx de la
variable aleatoire X. 95 % des valeurs de x sont contenues dans l’intervalle [x−2σ,x+
2σ].
– Elle permet des developpements mathematiques efficaces.
mx x
1/(2π)0.5
4 σ = 95%
Fig. 1.5 – Loi normale
1.5 Moyennes statistiques
Souvent on peut caracteriser une variable aleatoire uniquement par des informations partielles
comme la valeur moyenne de la variable aleatoire et sa dispersion autour de cette valeur
moyenne (variance).
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.5 Moyennes statistiques 131
1.5.1 Esperance mathematique
On appelle moyenne statistique (ou moment d’ordre 1), la quantite E est appelee esperance
mathematique :
E[X] = mx =
∫ +∞
−∞x pX(x) dx (1.10)
Si X est une variable aleatoire discrete, a partir de la relation 1.6, il vient :
E[X] = mx =
∫ +∞
−∞x
[∑i
P (xi)δ(x− xi)
]dx =
∑i
xi P (xi) (1.11)
Dans le cas ou les probabilites sont uniformement reparties, c’est-a-dire lorsque P (xi) = 1N
pour i = 1, . . . ,N , la relation 1.11 devient :
E[X] = mx =1
N
N∑i=1
xi (1.12)
ce qui donne la moyenne arithmetique des xi.
1.5.2 Fonction d’une variable aleatoire
L’esperance mathematique de Y = g(X) a pour expression :
E[Y ] =
∫ +∞
−∞y p(y)dy
soit
E[Y ] = E[g(X)] =
∫ +∞
−∞g(x)p(x)dx
Si X est une variable aleatoire discrete :
E[Y ] =∑i
g(xi)P (xi)
1.5.3 Fonction de deux variables aleatoires
L’esperance mathematique de Z = g(X,Y ) a pour expression :
CERI Avignon Traitement du signal J.-P.Costa

132 Chapitre 1. Rappels sur les probabilites
E[Z] = E[g(X,Y )] =
∫ +∞
−∞
∫ +∞
−∞g(x,y)p(x,y)dxdy
Si X et Y sont des variables aleatoires discretes alors :
E[Z] = E[g(X,Y )] =∑i
∑k
g(xi,yk)P (xi,yk)
ou P (xi,yk) = P [X = xi,Y = yk]
1.5.4 Remarques
On notera que l’esperance mathematique est un operateur lineaire :
E[X + Y ] = E[X] + E[Y ] (1.13)
E[cX] = c E[X] (1.14)
ou c est une constante.
1.5.5 Moments et variance
Le moments d’ordre n de la variable aleatoire X a pour expression :
Mn = E[Xn] =
∫ +∞
−∞xnp(x)dx (1.15)
Le moment d’ordre centre n de X a pour definition :
E[(X −mx)n] =
∫ +∞
−∞(x−mx)
n pX(x) dx (1.16)
avec mx = E[X].
Le moment centre d’ordre 2 de X est appele variance de X, soit :
var[X] = σ2x = E[(X −mx)
2] (1.17)
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.6 Moments conjoints et covariance 133
La racine carre de la variance, notee σx, est appelee ecart type de X. La variance est une
mesure de la dispersion des valeurs de X autour de sa valeur moyenne mx.
σ2x = E[X2 − 2mxX +m2
x] = E[X2]− 2mx E[X] +m2x = E[X2]−m2
x (1.18)
−4 −2 0 2 4 6 8 10 120
0.02
0.04
0.06
0.08
0.1
0.12
0.14
Densité de probabilité
0 50 100 150 200 250 300 350 400 450 500−2
0
2
4
6
8
10
12
Signal aléatoire de loi gaussienne
σ2x = 4, mx = 4
3 4 5 6 7 8 9 100
0.02
0.04
0.06
0.08
0.1
0.12
Densité de probabilité
0 50 100 150 200 250 300 350 400 450 5003
4
5
6
7
8
9
10
Signal aléatoire de loi gaussienne
σ2x = 1, mx = 6
Fig. 1.6 – Illustration de la moyenne et de la variance d’une variable aleatoire gaussienne
1.5.6 Fonction caracteristique
La fonction caracteristique d’une variable aleatoire X a pour definition :
ΦX(u) = E[ejuX ] =
∫ +∞
−∞ejuX pX(x) dx (1.19)
ou u est une variable reelle. Cette fonction passe par un maximum a l’origine et verifie la
propriete :
|ΦX(u)| ≤ ΦX(0) = 1
1.6 Moments conjoints et covariance
Un des objectifs fondamentaux du calcul des probabilites est d’etablir un lien eventuel entre
plusieurs resultats d’experiences. On est ainsi amene a etudier le comportement conjoint de
CERI Avignon Traitement du signal J.-P.Costa

134 Chapitre 1. Rappels sur les probabilites
plusieurs variables aleatoires comme le poids et la taille des individus d’un groupe, ou bien
l’age des conjoints d’un couple, etc.
1.6.1 Repartition conjointe
Soit deux variables aleatoires X et Y definies sur S. On definit FXY (x,y), la fonction de
repartition conjointe de X et Y , de la facon suivante :
FXY (x,y) = P (X ≤ x,Y ≤ y) (1.20)
Les evenements se composent de toutes les epreuves λ de S pour lesquelles on a simultanement
X(λ) ≤ x et Y (λ) ≤ y.
La densite de probabilite conjointe de X et Y a pour expression :
pXY (x,y) =∂2
∂x∂yFXY (x,y) (1.21)
ce qui implique que pXY (x,y) ≥ 0
1.6.2 Repartition marginale
Les fonctions FX(x) et FY (y) sont appelees fonction de repartition de probabilite marginales :
FX(x) = FXY (x,∞) (1.22)
FY (y) = FXY (∞,y) (1.23)
Les densite de probabilite marginales pX(x) et pY (y) ont pour expression :
pX(x) = F ′X(x) =
∫ +∞
−∞pXY (x,y)dy (1.24)
pY (y) = F ′Y (y) =
∫ +∞
−∞pXY (x,y)dx (1.25)
(1.26)
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.6 Moments conjoints et covariance 135
1.6.3 Repartition conditionnelle
La fonction de repartition conditionnelle deX par rapport a l’evenement A a pour definition :
FX(x|A) = P (X ≤ x|A) =P (X ≤ x,A)
P (A)avec P (A) 6= 0 (1.27)
ou P (X ≤ x,A est la probabilite de l’evenement conjoint X ≤ x ∪ A.
La densite de probabilite conditionnelle de X par rapport a A a pour definition :
pX(x|A) =dFX(x|A)
dx(1.28)
Soit X et Y deux variables aleatoires definies sur S. La densite de probabilite conditionnelle
de X par rapport a l’evenement Y = y a pour valeur :
pX|Y =pXY (x,y)
pY (y)avec pY (y) 6= 0 (1.29)
ou pY (y) est la densite de probabilite marginale de Y .
1.6.4 Variables aleatoires independantes
Deux variables aleatoires X et Y sont independantes si :
FXY (x,y) = FX(x)FY (y)
ou encore :
pXY (x,y) = pX(x) pY (y)
et pX|Y = pX(x)
Soit X et Y deux variables aleatoires de probabilite conjointe pXY (x,y).
1.6.5 Correlation
La correlation de X et de Y , que l’on note RXY , et qui a pour expression :
CERI Avignon Traitement du signal J.-P.Costa

136 Chapitre 1. Rappels sur les probabilites
RXY = E[XY ] =
∫ +∞
−∞
∫ +∞
−∞x y pXY (x,y) dxdy (1.30)
1.6.6 Covariance
La covariance de X et de Y , notee CXY , se definit comme suit :
CXY = E[(X −mx)(Y −my)] (1.31)
En developpant la relation, on obtient :
CXY = E[XY ]− E[X] E[Y ] = RXY −mxmy (1.32)
1.6.7 Coefficient de correlation
Le coefficient de correlation de X et Y a pour definition :
ρ ==CXYσx σy
(1.33)
ou σx, σy sont respectivement les ecarts types de X et Y . On peut montrer que |ρ| ≤ 1, il
s’en suit que |CXY | ≤ σx σy.
Si deux variables aleatoires X et Y sont non correlees si et seulement si CXY = 0. Dans ce
cas
E[XY ] = E[X] E[Y ] (1.34)
1.6.8 Evenements orthogonaux
Deux evenements sont dits orthogonaux (au sens de la correlation)si :
RXY = E[XY ] = 0 (1.35)
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.6 Moments conjoints et covariance 137
1.6.9 Variables conjointement gaussiennes
Les variables X et Y sont dites conjointement normales si leur probabilite conjointe a pour
expression :
pXY (x,y) =1
2πσxσy√
1− ρ2e
[(x−mxσx
)2−2ρ(x−mxσx
)(y−myσy
)+(y−myσy
)2](1.36)
Cette formule fait apparaıtre les variances de chacune des deux variables, leur moyenne, ainsi
que leur coefficient de correlation. Si le coefficient de correlation est nul (ρ = 0), pXY (x,y)
s’ecrit comme le produit
pXY (x,y) =
(1
σx√
2πe− (x−mx)2
2σ2x
)(1
σy√
2πe− (y−my)2
2σ2y
)(1.37)
Les variables sont donc independantes. La figure 1.7 represente pXY (x,y) pour mx = 0,
σx = 3, my = −1 et σy = 1).
−5
0
5
−5
0
5
0
0.02
0.04
0.06
x
p(x,y) de variables aléatoires gaussiennes
y
Fig. 1.7 – Densite de probabilite d’un couple de VA gaussiennes
CERI Avignon Traitement du signal J.-P.Costa

138 Chapitre 1. Rappels sur les probabilites
1.7 Changement de variables
1.7.1 Fonction de variables aleatoires
Etant donne une variable aleatoire X et une fonction g(x), l’expression
Y = g(X)
constitue une autre variable aleatoire dont la fonction de repartition est :
FY (y) = P (Y ≤ y) = P (g(X) ≤ y) (1.38)
1.7.2 Determination de la densite de probabilite
Pour trouver la densite de probabilite pY (y), on resout l’equation y = g(x). En designant
par xk les racines reelles de l’equation y − g(x) = 0, on a :
pY (y) =∑k
pX(x)
|g′(xk)|(1.39)
ou g′(x) est la derivee de g(x).
1.7.3 Formule de changement de variables
Definition
Soit deux variables aleatoires X1 et X2 de densite de probabilite conjointe pX1X2(x1x2) et
deux fonctions g1(x1,x2) et g2(x1,x2), considerons les deux variables aleatoires suivantes :
Y1 = g1(X1,X2)
Y2 = g2(X1,X2)
et supposons que la transformation soit bijective : a tout couple (y1,y2) donne, il existe alors
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.7 Changement de variables 139
une solution unique (x1,x2) qui s’ecrit : y1 = g1(x1,x2)
y2 = g2(x1,x2)⇔
x1 = h1(y1,y2)
x2 = h2(y1,y2)
Dans ce cas la densite de probabilite des variables aleatoires (Y1,Y2) a pour expression :
pY1Y2(y1,y2) = pX1X2(h1(y1,y2),h2(y1,y2)) |J(y1,y2)| (1.40)
ou J(y1,y2) represente le Jacobien de la transformation defini par :
J(y1,y2) = det
∣∣∣∣∣∣∂h1(y1,y2)
∂y1
∂h1(y1,y2)∂y2
∂h2(y1,y2)∂y1
∂h2(y1,y2)∂y2
∣∣∣∣∣∣ (1.41)
Plutot d’utiliser directement la formule 1.40 pour calcule la densite de probabilite, il est
parfois avantageux de revenir a la definition de la fonction de repartition de (Y1,Y2) en
determinant dans le plan (x1,x2) le domaine qui verifie {g1(x1,x2) ≤ y1} et {g2(x1,x2) ≤ y2},puis integrer sur ce domaine le fonction pX1X2(x1,x2). Pour obtenir la densite de probabilite,
il suffit ensuite de deriver successivement par rapport a y1 et y2 suivant la formule 1.21.
Exemple
Considerons deux variables aleatoires X et Y de densite de probabilite conjointe pXY (x,y)et
soit a calculer la densite de probabilite de la variable aleatoire Z = X + Y . Pour cela
considerons la transformation (x,y)→ (t,z)definie par :
t = x
z = x+ y⇔
x = t
y = z − t
Le Jacobien de la transformation s’ecrit :
J(t,z) =
∣∣∣∣∣∣∂x∂t
∂x∂z
∂y∂t
∂y∂z
∣∣∣∣∣∣ =
∣∣∣∣∣∣ 1 0
−1 1
∣∣∣∣∣∣ = 1
CERI Avignon Traitement du signal J.-P.Costa

140 Chapitre 1. Rappels sur les probabilites
et donc
pZ(t,z) = |J(t,z)|pXY (x,y) = pXY (t,z − t)
On en deduit la densite de probabilite de Z en integrant sur t (calcul de la loi marginale) :
pZ(z) =
∫ +∞
−∞pXY (t,z − t)dt
Dans le cas ou X et Y sont des variables aleatoires independantes, pXY (x,y) est a variables
separees et pZ(z) prend la forme d’un produit de convolution entre pX(x) et pY (y) :
pZ(z) =
∫ +∞
−∞pX(t)pY (z − t)dt (1.42)
1.8 Somme d’un grand nombre de variables aleatoires
independantes
La somme d’un grand nombre de variables aleatoires independantes de meme loi tend vers
une variable gaussienne. On peut generaliser ce resultat au cas ou les variables aleatoires ne
sont pas de meme loi et partiellement independantes. Ce qui justifie l’utilisation des variables
aleatoires gaussiennes pour representer les phenomenes aleatoires relativement complexes.
1.9 Exercices
1.9.1 Variables aleatoires, fonctions de repartition et densites
I. La densite de probabilite d’une variable aleatoire X a pour expression :
pX(x) =
k pour x ∈ [a1,a2[
0 ailleurs
ou k est une constante.
– Determiner la valeur de k.
– Soit a1 = −1 et a2 = 2. Evaluer la proba(|X| ≤ 1/2).
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

1.9 Exercices 141
II. La densite de probabilite de X a pour expression :
pX(x) = ke−axu(x)
ou a est une constante positive. Determiner la valeur de la constante k et dessiner
pX(x).
III. La probabilite conjointe de X et Y a pour expression :
pXY (x,y) = ke−(ax+by)u(x)u(y)
ou a et b sont des constantes positives. Determiner la valeur de k.
IV. La probabilite conjointe de X et Y a pour expression :
pXY (x,y) = xy e−(x2+y2)/2u(x)u(y)
– Evaluer les densites de probabilite marginales pX(x) et pY (y).
– X et Y sont-ils independants?
1.9.2 Moyennes statistiques
I. Soit Y = aX + b. Montrer que si la moyenne de X est mx et sa variance σ2x, alors,
my = amx + b et σ2y = a2σ2
x.
II. En utilisant l’equation 1.39, evaluer et tracer pY (y) pour Y = X2, lorsque X suit une
loi gaussienne avec mx = 0 et σ2x = 1.
III. Calculer la covariance de X et Y :
– lorsque X et Y sont independants.
– lorsqu’il existe entre X et Y la relation Y = aX + b.
CERI Avignon Traitement du signal J.-P.Costa

142 Chapitre 2. Signaux aleatoires
Chapitre 2 Signaux aleatoires
2.1 Introduction
Il existe de nombreux signaux naturels ou artificiels, comme les signaux de parole issu
d’un micro, la consommation d’electricite, un signal binaire de transmission, ou encore la
temperature journaliere releve a midi.
Dans ces exemples, on ne peut pas predire exactement l’echantillon suivant avant de l’avoir
observe. On ne peut donc pas considerer ces signaux comme deterministes ou il est difficile de
trouver un modele mathematique d’evolution, ou les variations fines ne sont pas interessantes
ou le signal est trop important a memoriser. Pour toutes ces raisons, on modelise ce signal
x(k) comme la realisation d’un processus aleatoireX(k). On ignorera les valeurs instantanees
du signal pour s’interesser aux valeurs statistiques (valeur moyenne, variance, fonction
d’autocorrelation,...).
L’analyse spectrale de processus aleatoire fait appel aux valeurs statistiques. Un processus
stochastique X(t) est une variable aleatoire indexee par le parametre continu t alors que le
processus X(t) peut-etre continu ou discret. Un processus stochastique a une energie infinie
et l’analyse spectrale est obtenue en prenant la TF de la fonction d’autocorrelation, c’est la
densite spectrale de puissance. On traitera dans la suite de ce cours, des processus aleatoires
stationnaires au second ordre et ergodiques.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

2.2 Les moments temporels, les relations de base 143
0 20 40 60 80 100 120 140 160 180 200−2
−1
0
1
2
Ep
reu
ve
1
Processus stochastique
0 20 40 60 80 100 120 140 160 180 2000
0.5
1
Ep
reu
ve 2
0 20 40 60 80 100 120 140 160 180 200−10
−5
0
5
10
Ep
reu
ve 3
Fig. 2.1 – Processus stochastique
2.2 Les moments temporels, les relations de base
2.2.1 Moyenne temporelle
On appelle moyenne temporelle, la quantite :
x(t) = limT→∞
1
T
∫ T/2
−T/2x(t) dt
2.2.2 Autocorrelation temporelle
On appelle autocorrelation temporelle, la quantite :
x(t)x(t+ τ) = Rxx(τ) = limT→∞
1
T
∫ T/2
−T/2x(t)x(t+ τ) dt
CERI Avignon Traitement du signal J.-P.Costa

144 Chapitre 2. Signaux aleatoires
2.3 Caracteristiques statistiques d’un processus aleatoire
2.3.1 Moyenne statistique
Definition
On appelle moyenne statistique, la quantite E appele esperance mathematique :
E[X(t)] = mx(t) =
∫ +∞
−∞x p(x,t) dx (2.1)
ou p(x,t) correspond a la densitete de probabilite de la variable aleatoire X(t).
2.3.2 Autocorrelation, autocovariance statistiques
On appelle autocorrelation statistique, la quantite :
Rxx(t1,t2) = E[X(t1)X(t2)] =
∫ ∫ +∞
−∞x1 x2 p(x1,x2; t1,t2) dx1 dx2 (2.2)
avec p(x1,x2; t1,t2) la densite de probabilite conjointe des deux variables aleatoires X(t1) et
X(t2).
On defini egalement la fonction d’autocovariance statistique par :
Cxx(t1,t2) = E[(X(t1)−mx(t1)) (X(t2)−mx(t2))] (2.3)
ainsi que la variance (t1 = t2) par Var[X(t)] = E[(X(t)−mx(t))2] = σ2
2.4 Stationnarite, Ergodicite
2.4.1 Stationnarite au sens strict
Un processus aleatoire X(t) est dit stationnaire au sens strict si ses proprietes statistiques
sont invariantes lorsqu’on change l’origine des temps :
p(x1,x2, . . . ,xn; t1,t2, . . . ,tn) = p(x1,x2, . . . ,xn; t1 + c,t2 + c, . . . ,tn + c) (2.4)
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

2.4 Stationnarite, Ergodicite 145
quel que soit c.
2.4.2 Processus aleatoire stationnaire au second ordre
Un processus aleatoire est stationnaire au sens large (au second ordre) ssi :
1. La moyenne E[X(t)] est independante du temps :
E[X(t)] = mx = cste .
2. La fonction d’autocorrelation ne depend que de τ = t2 − t1 :
Rxx(t1,t2) = Rxx(τ)
Dans ce cas la fonction d’autocovariance est donnee par
Cxx(τ) = Rxx(τ)−m2x
Dans le cas ou X(t) est centre mx = 0 et Rxx(τ) = Cxx(τ)
Exemple
Soit x(t) = A cos(ωt + φ) un processus aleatoire ou A et ω sont deterministes et φ est une
variable aleatoire equirepartie entre [0,2π]. Calculer E[x(t)] ainsi que la fonction d’autocorrelation
Rxx(t1,t2).
2.4.3 Processus ergodique
Un processus aleatoire est ergodique a l’ordre n si les moyennes temporelles jusqu’a l’ordre
n sont independantes du choix de la realisation. De plus, si les resultats obtenus a partir des
moyennes statistiques sont equivalents a ceux obtenus a partir des moyennes temporelles,
alors le processus est ergodique.
Un processus stationnaire du second ordre est ergodique si Rxx(τ) = Rxx(τ)
CERI Avignon Traitement du signal J.-P.Costa

146 Chapitre 2. Signaux aleatoires
2.5 Correlation
Dans la suite on suppose que les processus stochastiques sont stationnaires au sens large.
2.5.1 Autocorrelation statistique
L’autocorrelation de X(t) a pour valeur,
Rxx(τ) = E[X(t)X(t+ τ)] (2.5)
Proprietes
Les proprietes de Rxx(τ)
– fonction paire, Rxx(−τ) = Rxx(τ),
– maximum en 0, |Rxx(τ)| ≤ Rxx(0) = E[X2(t)],
2.5.2 Intercorrelation statistique
On definit la fonction d’intercorrelation de 2 processus aleatoires stationnaires X(t) et Y (t)
par :
Rxy(τ) = E[X(t)Y (t+ τ)] (2.6)
avec Rxy(τ) = Ryx(−τ).
Dans le cas ou les processus sont ergodiques, on definit
Rxy(τ) = Rxy(τ) = limT→∞
1
T
∫ T/2
−T/2x(t) y(t+ τ) dt
Les transformees de Fourier de Rxy et de Ryx sont appelees densites interspectrales de
puissance.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

2.6 Analyse spectrale des processus aleatoires 147
2.5.3 Autocovariance
Dans ce cas la fonction d’autocovariance est donnee par
Cxx(τ) = E [(X(t)− E[X(t)])(X(t+ τ)− E[X(t+ τ)])] (2.7)
Cxx(τ) = Rxx(τ)−m2x (2.8)
2.5.4 Intercovariance
L’intercovariance de X(t) et Y (t) a pour expression :
Cxy(τ) = E[(X(t)− E[X(t)])(Y (t+ τ)− E[Y (t+ τ)])] (2.9)
Cxy(τ) = Rxy(τ)−mxmy (2.10)
Les deux processus stochastiquesX(t) et Y (t) sont dit mutuellement orthogonaux si Rxy(τ) =
0.
Les deux processus stochastiques X(t) et Y (t) sont dit non correles lorsque
Cxy(τ) = 0.
2.6 Analyse spectrale des processus aleatoires
2.6.1 Densite spectrale de puissance
La densite spectrale de puissance d’un processus aleatoire stationnaire est la transformee de
Fourier de sa fonction d’autocorrelation statistique :
Rxx(τ)TF
−→Γxx(f) =
∫ +∞
−∞Rxx(τ) e−j2πfτ dτ (2.11)
(relation de Wiener–Khintchine)
La densite interspectrale de puissance Γxy ou Γyx correspond a la transformee de Fourier de
Rxy respectivement Ryx.
CERI Avignon Traitement du signal J.-P.Costa

148 Chapitre 2. Signaux aleatoires
2.6.2 Le bruit blanc b(t)
Parmi les processus aleatoires, le bruit blanc revet une importance particuliere car il represente
le modele de nombreux phenomenes physiques. Le mot blanc prend son origine dans l’analogie
avec la lumiere blanche, dont la puissance est uniformement repartie sur l’axe des frequences.
Un bruit blanc b(t) de variance σ2b est un signal aleatoire stationnaire au second ordre centre
(mb = 0) dont la fonction d’autocorrelation statistique
Rxx(τ) = E[b(t) b(t+ τ)] = σ2b δ(τ) (2.12)
d’ou
Rxx(τ)TF
−→Γ(f) = σ2
b (2.13)
donc
E =
∫ +∞
−∞Γ(f) df =∞
Le bruit blanc est un signal a energie et puissance infinie.
2.6.3 Le bruit colore
Dans de nombreuses applications, les systemes rencontres ont une largeur de bande limitee
(−B/2,B/2). On modelise souvent le bruit par un processus reel, dont la densite spectrale
de puissance est egale a σ2b dans cette bande et nulle partout ailleurs. Sa puissance est alors
Bσ2b . On parle dans ce cas de bruit colore.
2.7 Processus aleatoires particuliers
2.7.1 Sequences independantes et identiquement distribuees (i.i.d.)
Le modele le plus simple de suite aleatoire est celui ou toutes les variables de la suite ont la
meme loi et sont independantes.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

2.7 Processus aleatoires particuliers 149
Considerons un processus aleatoireX(t) et definissons n variables aleatoiresX(t1),X(t2), . . . ,X(tn)
correspondant a n instants de mesure t1,t2, . . . ,tn. On forme un vecteur aleatoire X (n× 1),
qui a pour definition :
X =
X(t1)
X(t2)
. . .
X(tn)
(2.14)
La loi de probabilite d’une variable aleatoire de X, prise a un instant n quelconque, est
independant de n : on dit alors que X est identiquement distribuee.
Quel que soit le nombre d’instants et quelle que soit la suite des instants les variables
aleatoires X(t1),X(t2), . . . ,X(tn) sont mutuellement independantes.
Une telle sequence est designee par sequence aleatoire i.i.d. (Independantes et Identiquement
Distribuees).
Le bruit blanc est un exemple de sequence i.i.d. centree.
2.7.2 Processus aleatoire gaussien
Soit le vecteur aleatoire definit par l’equation 2.14 au paragraphe precedent. Soit x un
vecteur (n× 1) ayant pour definition :
x =
x1
x2
. . .
xn
(2.15)
Ce qui permet de noter {X ≤ x} l’evenement {X(t1) ≤ x1, . . . ,X(tn) ≤ xn}. X(t) est
par definition, un processus gaussien si X presente une densite multivariable conjointement
gaussienne pour tout ensemble fini de valeur ti et pour tout n.
La densite multivariable d’un processus gaussien a pour expression :
p(x) =1
(2π)n/2| det C|1/2exp
[−1
2(x-m)tC−1(x-m)
](2.16)
CERI Avignon Traitement du signal J.-P.Costa

150 Chapitre 2. Signaux aleatoires
ou t designe l’operation de transposition matricielle, m est le vecteur moyenne, C est la
matrice de covariance, d’expression :
m = E[X] =
m1
m2
. . .
mn
=
E[X(t1)]
E[X(t2)]
. . .
E[X(tn)]
(2.17)
C =
C11 . . . C1n
. . . . . . . . .
Cn1 . . . Cnn
(2.18)
ou Cij = CXX(ti,tj) = RXX(ti,tj) −mimj expression qui represente la covariance de X(ti)
et X(tj), tandis que det C est le determinant de la matrice C. Les proprietes les plus
importantes d’un processus gaussien sont enumerees ci-apres :
1. un processus gaussien est entierement defini par l’ensemble de ses moyennes mi ainsi
que par ses fonctions d’autocorrelation RXX(ti,tj) avec i,j = 1, . . . ,n.
2. Si l’ensemble des variables aleatoires X(ti), ne presentent aucune correlation , c’est a
dire si Cij = 0 i 6= j, alors les X(ti) sont independants.
3. Si un processus gaussien X(t) est stationnaire au sens large, alors il l’est au sens strict.
4. Si l’on applique un processus gaussien a l’entree d’un systeme lineaire, le processus
aleatoire en sortie est lui aussi gaussien.
2.8 Filtrage des processus aleatoires
2.8.1 Introduction
On se place dans le cas ou les signaux etudies sont stationnaires au sens large et ou le
systeme etudie est lineaire et invariant dans le temps.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

2.8 Filtrage des processus aleatoires 151
On a donc defini un sens a la densite spectrale de puissance d’un signal aleatoire pour
chaque frequence sans considerer la transformee de Fourier du signal x(t) lui-meme, mais la
transformee de Fourier de la fonction d’autocorrelation.
Attention ceci est un modele theorique c’est a dire que le calcul de Γ(f) a une frequence
necessite le calcul de l’autocorrelation Rxx(τ) de ]−∞,+∞[. En pratique :
1. On echantillonne les variables x(k), Rxx(k),
x(t)→ x(k) = x(kTe) : on n’a pas de perte d’information si x(t) a une frequence max
≤ fe2
(sinon on utilise un filtre antirepliement).
2. on considere un intervalle fini d’observation.
Le probleme majeur est qu’il faut considerer que le signal reel est stationnaire sur une
longue periode. Ceci n’est pas vrai et on dira que le signal est quasi-stationnaire sur
la preriode d’observation de N echantillons. On a seulement des estimes Rxx(k) de
Rxx(k) et donc Γ(f) sera entache d’erreur. De plus, on a un nombre fini de valeur de
Rxx(k). Pour toute ses raisons on ne parle plus d’analyse spectrale mais d’estimation
spectrale.
2.8.2 Les relations en discret
La fonction d’autocorrelation statistique discrete du processus X(n) aleatoire stationnaire
discret est :
Rxx(k) = E[X(n)X∗(n+ k)]
avec k ∈]−∞,+∞[
La fonction d’intercorrelation statistique entre deux processus X(n) et Y (n) aleatoires
stationnaires est
Rxy(k) = E[X(n)Y ∗(n+ k)]
La densite spectrale de puissance d’un processus aleatoire stationnaire est definie par la
transformee de Fourier de la fonction d’autocorrelation statistique discrete Rxx(k)
Γxx(f) =+∞∑
k=−∞
Rxx(k) e−j2πfk
CERI Avignon Traitement du signal J.-P.Costa

152 Chapitre 2. Signaux aleatoires
La densite interspectrale de puissance est :
Γxy(f) =+∞∑
k=−∞
Rxy(k) e−j2πfk
Un bruit blanc discret b(n) de variance σ2b est un processus aleatoire stationnaire, centre,
dont les echantillons b(n) ne sont pas correles entre eux d’ou
Rbb(k)) = σ2b δ(k)
Γbb(k)) = σ2b
avec δ(k)) = 1 pour k = 0 et 0 si k 6= 0.
2.8.3 Filtre lineaire invariant dans le temps
Soit le signal de sortie y(n) issue d’un systeme lineaire de reponse impulsionnelle h(n) excite
par un signal d’entree aleatoire x(n). La convolution lineaire s’ecrit alors,
y(n) =+∞∑l=−∞
h(l)x(n− l) = x(n) ∗ h(n)
L’autocorrelation du signal de sortie s’ecrit
Ryy(k) = E[y(n)y∗(n+ k)]
= E
[(+∞∑l=−∞
h(l)x(n− l)
)(+∞∑p=−∞
h∗(p)x∗(n+ k − p)
)]=
∑l
h(l)∑p
h∗(p)Rxx(k + n− p− n+ l)
=∑l
h(l)∑u
h∗(u+ l)Rxx(k − u)
=∑u
Rhh(u)Rxx(k − u)
Finalement on a
Ryy(k) = Rhh(k) ∗Rxx(k) (2.19)
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

2.9 Exercices 153
Par transformee de Fourier, on obtient
Γyy(f) = |H(f)|2 Γxx(f)
Dans le cas ou x(n) est un bruit blanc, Rxx(n) = σ2bδ(n) alors, Γyy(f) = σ2
b |H(f)|2.
2.9 Exercices
2.9.1 Stationnarite
I. On considere le processus aleatoire X(t) ayant pour definition :
X(t) = A cos(ωt) +B sin(ωt)
ou A et B sont des VA tandis que ω est une constante.
(a) Quelle est la condition sur E[X(t)] pour que X(t) soit stationnaire.
(b) Montrer que X(t) est stationnaire au sens large ssi A et B sont non correlees et
ont meme variance.
II. Montrer que si X(t) est stationnaire au sens large, on a la relation suivante :
E[(X(t+ τ)−X(t))2)
]= 2[Rx(0)−Rx(τ)]]
2.9.2 Filtrage
1. On definit la fonction d’intercorrelation entre deux signaux aleatoires discrets reels
par
Ryx(k) = E[y(n)x(n− k)]
On suppose que le signal y(n) est issu du filtrage de x(n) par un filtre numerique
lineaire stationnaire de reponse impulsionnelle h(n).
Donner la relation qui lie Ryx(k), h(n) et Rx(n) (fonction de correlation du signal
x(n)).
CERI Avignon Traitement du signal J.-P.Costa

154 Chapitre 2. Signaux aleatoires
2. On considere un filtre numerique de reponse impulsionnelle h(n) definie par
h(n) =
bn pour n ≥ 0
0 pour n < 0avec 0 < b < 1
Le signal d’entree x(n) est un signal discret stationnaire centre de fonction d’autocorrelation
Rx(k) = a|k| avec 0 < a < 1
On note y(n) le signal de sortie du filtre.
(a) Preciser pourquoi on a suppose que 0 < b < 1 et 0 < a < 1.
(b) Montrer que la densite spectrale de puissance de x(n) est egale a :
Sx(f) =1− a2
1 + a2 − 2acos(2πf)
(c) Montrer que la densite spectrale de puissance de y(n) est egale a :
Sy(f) =1
1 + b2 − 2bcos(2πf)Sx(f)
(d) Calculer l’intercorrelation Ryx(k).
2.9.3 Processus aleatoires particuliers
Soit X un vecteur aleatoire gaussien a n composantes independantes, selon la relation 2.7.2.
Montrer que la fonction de densite conjointe multivariable a pour expression :
p(x) =1
(2π)n/2∏n
i=1 σiexp
[−1
2
n∑i=1
(xi −mi
σi)2
]ou mi = E[Xi] et σ2
i = var(Xi)
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

155
Chapitre 3 Identification parametrique
3.1 La transformee en z
3.1.1 Definition
La transformee en z (bilaterale), X(Z), de x(n) est definie par la relation suivante :
X(Z) =+∞∑
n=−∞
x(n)Z−n (3.1)
Z est une variable complexe et la fonction X(Z) possede un domaine de convergence qui
en general est un anneau centree sur l’origine, de rayons R1 et R2. C’est dire que X(Z) est
definie pour R1 < |Z| < R2. Les valeurs de R1 et R2 dependent de la suite x(n).
Si la suite x(n) represente la suite des echantillons d’un signal echantillonnes a la periode
T , la transformation de Fourier de cette suite s’ecrit :
X(f) =+∞∑
n=−∞
x(n) e−j2πfnT
Ainsi pour Z = ej2πfT la transformee en Z de la suite x(n) coıncide avec sa transformee de
Fourier. C’est a dire que l’analyse d’un systeme discret peut se faire avec la transformee en
Z et pour connaıtre la reponse en frequence, il suffit de remplacer Z par ej2πfT .
CERI Avignon Traitement du signal J.-P.Costa

156 Chapitre 3. Identification parametrique
3.1.2 Transformee en z unilaterale
Dans le cas des signaux et systemes causaux, on utilise la transformee en z unilaterale definie
pour n ≥ 0 :
X(z) =+∞∑n=0
x(n)Z−n (3.2)
3.1.3 Fonction de transfert
Dans le cas d’un filtre lineaire, on rappelle que la relation d’entree (x(n)) sortie (y(n)) est
donnee par le produit de convolution suivant :
y(n) = h(n) ∗ x(n) =+∞∑i=−∞
h(i)x(n− i)
En prenant respectivement la transformee de Fourier et en z on obtient :
Y (f) = H(f)X(f) (3.3)
Y (Z) = H(Z)X(Z) (3.4)
H(Z) est appelee fonction de transfert du filtre et
H(f) =+∞∑
n=−∞
h(n) e−j2πfn
est appele la reponse en frequence. On note que
h(n) =
∫ 1/2
−1/2H(f)ej2πfn df (3.5)
Fonction de transfert d’un systeme stable
Si le systeme est stable, alors sa reponse impulsionnelle est absolument sommable :
+∞∑n=−∞
|h(n)| < ∞
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

3.1 La transformee en z 157
Cette condition entraıne que l’anneau de convergence doit necessairement contenir le cercle
unite.
Fonction de transfert d’un systeme causal stable
Si le systeme lineaire invariant est causal et stable, le cercle unite doit etre contenu dans
la region de convergence d’un systeme causal. Par consequent, pour un systeme causal et
stable, la fonction de transfert converge a l’interieur d’un cercle dont le rayon est en tout
cas plus petit que l’unite. Ainsi, les poles de la fonction de transfert d’un systeme lineaire
invariant causal et stable doivent se trouver a l’interieur du cercle unite.
On peut, par la position des poles dans ce plan, connaıtre immediatement si le systeme est
stable ou non.
3.1.4 Systemes definis par une equation aux differences
Les systemes lineaires invariants dans le temps, les plus interessants sont les systemes ou les
entrees sorties sont liees par une equation aux differences lineaire a coefficients constants. En
effet, d’une part ils correspondent a des realisations simples et d’autre part ils constituent
une excellente modelisation de nombreux systemes naturels.
Un systeme de ce type est defini par la relation suivante :
y(n) =N∑i=0
aix(n− i)−M∑j=1
bjy(n− j) (3.6)
En appliquant la transformation en z aux membres de cette equation, on obtient :
Y (Z) =N∑i=0
aiZ−iX(Z)−
M∑j=1
bjZ−jY (Z) (3.7)
soit
Y (Z) = H(Z)X(Z)
avec
H(Z) =a0 + a1Z
−1 + . . .+ aNZ−N
1 + b1Z−1 + . . .+ bMZ−M(3.8)
CERI Avignon Traitement du signal J.-P.Costa

158 Chapitre 3. Identification parametrique
La fonction de transfert du systeme H(Z) est une fraction rationnelle. Les ai et les bj sont
les coefficients du systeme. Certains coefficients du systeme peuvent etre nuls. Pour faire
apparaıtre la reponse en frequence, il suffit de remplacer dans H(Z), la variable Z par ej2πf .
En mettant en evidence les racines des deux polynomes, on peut exprimer H(Z) par :
H(Z) =N(Z)
D(Z)= a0
∏Ni=1(Z − Zi)∏Mj=1(Z − Pj)
(3.9)
Les Zi et Pj sont respectivement les zeros et les poles de la fonction de transfert H(Z).
L’analyse d’un systeme par sa reponse en frequence correspond a un fonctionnement en
regime permanent; elle est suffisante dans la mesure ou les phenomenes transitoires peuvent
etre negliges. Si ce n’est pas le cas il faut introduire les conditions initiales.
3.1.5 Filtres a reponse impulsionnelle finie
Les filtres numeriques a reponse impulsionnelle finie (RIF) sont des systemes lineaires
discret invariants dans le temps definis par une equation selon laquelle un nombre de sortie,
representant un echantillon du signal filtre, est obtenu par la somme ponderee d’un ensemble
fini de nombres d’entree, representant les echantillons du signal a filtrer. Les coefficients de
la sommation constituent la reponse impulsionnelle du filtre. Ce filtre est du type a memoire
finie, c’est a dire qu’il determine sa sortie en fonction d’informations d’entree d’anciennete
limitee.
L’equation d’entree–sortie est donnee par l’equation :
y(n) =N∑i=0
aix(n− i) (3.10)
Le filtre ainsi defini comporte un nombre N fini de coefficients ai. Considere comme un
systeme discret, il a pour reponse a la suite unitaire la suite h(i) telle que
h(i) = ai si 0 ≤ i ≤ N − 1
h(i) = 0 ailleurs
C’est a dire que la reponse impulsionnelle est simplement la suite des coefficients.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

3.1 La transformee en z 159
La fonction de transfert du filtre s’ecrit :
H(f) =N−1∑i=0
aie−2iπfT (TF) (3.11)
H(Z) =N−1∑i=0
aiZ−i (TZ) (3.12)
La fonction H(f) est une fonction periodique, de periode fe = 1T
. Les coefficients ai
constituent le developpement en serie de Fourier de cette fonction :
N−1∑i=0
|ai|2 =1
fe
∫ fe
0
|H(f)|2df (3.13)
3.1.6 Exemples
Filtre en cosinusoıde
Soit x(t) represente par ses echantillons x(nT ), preleves a la frequence fe = 1/T . Soit la
relation d’entree sortie suivante :
y(nT ) = 1/2 [x(nT ) + x((n− 1)T )]
Si Y (f) et X(f) designent les transformees de Fourier des signaux y(t) et x(t), il vient
Y (f) = 1/2X(f)(1 + e−2iπfT )
La fonction de transfert s’ecrit donc :
H(f) = e−iπfT cos(πfT )
C’est une operation de filtrage, qui conserve la composante continue et elimine la composante
a la frequence fe/2. Dans l’expression de H(f), le terme complexe e−2iπfT/2 caracterise un
retard τ = T/2 qui est le temps de propagation du signal a travers le filtre.
CERI Avignon Traitement du signal J.-P.Costa

160 Chapitre 3. Identification parametrique
La reponse impulsionnelle h(t) qui correspond au filtre de fonction de transfert |H(f)|s’ecrit :
h(t) = 1/2 [δ(t+ T/2) + δ(t− T/2)]
../../IUP2/TNS/arma01-eps-converted-to.pdf
Filtre en cosinusoıde
../../IUP2/TNS/arma02-eps-converted-to.pdf
Filtre en cosinusoıde surelevee
Filtre en cosinusoıde surelevee
Soit l’equation recurrente suivante :
y(nT ) = 1/4 [x(nT ) + 2x[(n− 1)T ] + x[(n− 2)T ]]
Comme le filtre precedent, il conserve la composante continue et elimine celle a fe/2. Elle
correspond a la fonction de transfert :
H(f) = 1/4(1 + 2e−2iπf2T + e−2iπf2T ) =e−2iπfT
2(1 + cos(2πfT ))
Le filtre obtenu est dit en cosinusoıde surelevee; son temps de propagation est τ = T . La
reponse impulsionnelle est donne par :
h(t) = 1/4 [δ(t+ T ) + 2δ(t) + δ(t− T )]
Ce filtre est un passe-bas plus selectif que le precedent et il apparaıt clairement que pour
obtenir une fonction de filtrage plus selective encore il suffit d’augmenter le nombre de
termes de la suite x(nT ) sur lesquels porte la sommation ponderee.
../../IUP2/TNS/arma03-eps-converted-to.pdf
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

3.1 La transformee en z 161
3.1.7 Filtres a reponse impulsionnelle infinie
Les filtres a reponse impulsionnelle infinie sont des systemes lineaires discrets invariants dans
le temps dont le fonctionnement est regi par une equation de convolution portant sur une
infinite de termes. En principe, il conserve une trace des signaux qui leur ont ete appliques
pendant une duree infinie, ils sont a memoire infinie. Une telle memoire est realisee par une
boucle de reaction de la sortie sur l’entree. Chaque element de la suite des nombres de sortie
est calcule par sommation ponderee d’un certain nombre d’elements de la suite d’entree et
d’un certain nombre d’elements de la suite de sortie precedents.
Le fait d’avoir cette reponse impulsionnelle infinie permet d’obtenir en general des fonctions
de filtrage beaucoup plus selectives que celles des filtre RIF a quantite de calculs equivalente.
Cependant la boucle de reaction complique l’etude des proprietes et la conception de ces
filtres et amene des phenomenes parasites.
Expression generale
Le filtre RII general a pour expression :
y(n) =N∑i=0
ai x(n− i)−M∑j=1
bj y(n− j) (3.14)
La fonction de transfert (en Z) de ce systeme s’ecrit :
H(Z) =a0 + a1Z
−1 + . . .+ aNZ−N
1 + b1Z−1 + . . .+ bMZ−M(3.15)
C’est le quotient de deux polynomes en Z. Les coefficients ai et bj etant reels, H(Z) est un
nombre complexe.
3.1.8 Comparaison entre les filtres RIF et RII
Les deux types de filtres examines RIF et RII, permettent de satisfaire un gabarit quelconque
donne. La question du choix entre ces deux approches se pose frequemment au concepteur
de systemes. Le critere est la complexite des circuits a mettre en oeuvre; en pratique la
comparaison se ramene principalement a l’evaluation du parametre simple qui constitue le
CERI Avignon Traitement du signal J.-P.Costa

162 Chapitre 3. Identification parametrique
nombre de multiplications a effectuer.
3.2 Processus aleatoire
L’idee d’utiliser des modeles de filtres pour representer des processus aleatoires est due a
l’origine de Yule (1927). Elle consiste a considerer une suite aleatoire (supposee centree),
comme la sortie d’un filtre lineaire excite par un bruit blanc.
3.2.1 Processus MA
On considere le processus aleatoire (i.i.d.) x(n) comme etant la combinaison lineaire suivante :
x(n) = b0w(n) + b1w(n− 1) + . . .+ bMw(n−M) (3.16)
ou w(n) designe un processus aleatoire reel, centre, stationnaire, blanc de variance σ2w non
correle avec x(n) et {bi} une suite de coefficients reels. Le processus ainsi construit apparaıt
comme la moyenne pondere des M + 1 dernieres valeurs des entrees par la suite {bi}. Pour
cette raison, on parle de moyenne mobile, qui se dit en anglais Moving Average (MA). Par
construction, x(n) est la sortie d’un filtre lineaire dont la reponse impulsionnelle est la suite
{bi}. Ce filtre a donc pour fonction de transfert :
H(z) = b0 + b1z−1 + b2z
−2 + . . .+ +bMz−M (3.17)
Cette fonction de transfert ne possede pas de poles. Elle correspond donc a un filtre a reponse
impulsionnelle fini (filtre stable). Ce modele permet de representer facilement des processus
ayant des ”vallees” dans leur densite spectrale.
3.2.2 Processus AR
Par definition on dit qu’un processus aleatoire x(n) est AutoRegressif (AR), si x(n) verifie
l’equation recurrente suivante :
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

3.2 Processus aleatoire 163
x(n) + a1x(n− 1) + a2x(n− 2) + . . .+ aNx(n−N) = w(n) (3.18)
x(n) = w(n)− a1x(n− 1)− a2x(n− 2)− . . .− aNx(n−N) (3.19)
ou tous les ai reels. La fonction de transfert du filtre ayant pour sortie la suite x(n) et pour
entree la suite w(n) est donnee par :
H(z) =1
1 + a1z−1 + . . .+ aNz−N(3.20)
Ce modele est tout pole, il correspond a un filtre a reponse impulsionnelle infinie, il pourra
representer des processus ayant des ”pics” dans la densite spectrale. On rappelle qu’un filtre
est stable si et seulement si tous les poles de sa fonction de transfert sont a l’interieur du
cercle unite; l’equation 3.19 admet alors une solution stationnaire unique x(n) qui s’exprime
a partir de w(n) de la maniere suivante :
x(n) =n∑
k=−∞
h(n− k)w(k) (3.21)
ou la suite h0,h1, . . . ,hp, . . . est la suite des coefficients du developpement en serie entiere de
H(z).
Exemple
Soit x(n) = sin(ω0nT ), sa transformee en Z est donne par :
X(Z) =Z sin(ω0T )
Z2 − 2Z cos(ω0T ) + 1=
Z−1 sin(ω0T )
1− 2Z−1 cos(ω0T ) + Z−2
La transformee inverse de cette equation est
x(n+ 2)− 2 cos(ω0T )x(n+ 1) + x(n) = 0
CERI Avignon Traitement du signal J.-P.Costa

164 Chapitre 3. Identification parametrique
Equation de Yule–Walker
L’equation de Yule–Walker exprime une relation entre les coefficients de l’equation 3.19 et
les covariances du processus x(n).
Considerons le processus AR reel d’ordre 1
x(n) = −a1x(n− 1) + w(n)
En prenant l’esperance mathematique de cette derniere equation, on trouve que le processus
x(n) est centre. En effet,
E[x(n)] + a1 E[x(n− 1)] = E[w(n)] (3.22)
comme E[w(n)] = 0 (processus centre), il vient que E[x(n)] = E[x(n− 1)] = 0.
Comme le processus x(n) est centre, la fonction d’autocovariance s’exprime par R(τ) =
E[x(n)x(n+ τ)] et verifie le systeme d’equations :
R(0) + a1R(1) = σ2w
R(−1) + a1R(0) = 0(3.23)
En effet, on obtient ces equations en prenant l’esperance mathematique de x(n)x(n) et
x(n)x(n− 1) a partir de l’equation .
Le systeme d’equation peut se mettre sous forme matricielle RA = c, ou on a pose A =
[1 a1]t et c = [σ2
w 0]t et :
R(0) R(1)
R(−1) R(0)
Partant de systeme d’equations, on peut en deduire a1 et σ2
w par :
a = −R(1)
R(0)et σ2
w = R(0)− R2(1)
R(0)(3.24)
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

3.3 Application a la prediction lineaire 165
Generalisation
Ces equation se generalisent au cas d’un modele AR d’ordreN dont la fonction d’autocovariance
verifie le systeme matriciel :
R(0) R(1) . . . R(N)
R(−1) R(0). . .
......
. . . . . . R(1)
R(−N) · · · R(−1) R(0)
1
a1...
aN
=
σ2w
0...
0
(3.25)
Comme x(n) est reel, cette matrice est symetrique. Elle depend de N(N + 1)/2 valeurs de
la fonction d’autocovariance, de plus, elle possede une forme particuliere appele matrice de
Toeplitz.
3.2.3 Processus ARMA
Les processus ARMA s’obtiennent en mettant en serie une structure AR et une structure
MA. Soit l’equation recurrente :
x(n) + a1x(n− 1) + . . .+ aNx(n−N) = b0w(n) + b1w(n− 1) + . . .+ bMw(n−M) (3.26)
L’equation du filtre est donne par l’equation 3.15.
On montre que cette equation recurrente admet une solution x(n), stationnaire au second
ordre, unique, qui s’exprime en fonction de w(n), si et seulement si les racines du denominateur,
qui sont les poles de la fonction de transfert, sont de modules inferieur a 1.
3.3 Application a la prediction lineaire
3.3.1 Definitions
Predicteur a un pas d’ordre p
Par definition le predicteur a un pas, d’ordre p cherche a predire le signal a l’instant n,
connaissant le signal aux instants n− 1, n− 2, . . ., (n− p).
CERI Avignon Traitement du signal J.-P.Costa

166 Chapitre 3. Identification parametrique
x(n|n− 1) = −p∑
k=1
akx(n− k) (3.27)
Predicteur a deux pas d’ordre p
Un predicteur a deux pas d’ordre p serait la valeur predite a l’instant n a partir des valeurs
aux instants n− 2, . . ., (n− p).
Predicteur a α pas d’ordre p
x(n|n− α) = −p∑
k=1
akx(n− α + 1− k)
Erreur de prediction
On definit l’erreur de prediction par :
e(n) = x(n)− x(n|n− 1) (3.28)
Dans le cas ou e(n) est un bruit blanc alors
x(n) = −p∑
k=1
akx(n− k) + e(n)
x(n) sera alors un processus AR. Le probleme est de connaıtre les coefficients ak connaissant
les mesures de x.
Pour determiner les parametres, il faudrait inverser la matrice d’autocovariance (eq. 3.25)
qui est symetrique. Il existe dans la litterature des algorithmes permettant de s’affranchir
de cette inversion. L’algorithme de Levinson en est un exemple.
Algorithme de Levinson
Il consiste a calculer de maniere recursive des predicteurs a un pas d’ordre croissant.
En considerant tout d’abord une matrice 2× 2 :
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

3.3 Application a la prediction lineaire 167
Rxx(0) Rxx(−1)
Rxx(1) Rxx(0)
1
a11
=
P1
0
On obtient facilement :
a11 = −Rxx(1)
Rxx(0)
P1 = (1− a11(a11)∗)
ou P (0) = Rxx(0) et P1 est la puissance (ou variance) de l’erreur de prediction et a11 est le
coefficient de reflexion. Il pour caracteristique d’avoir un module inferieur a l’unite.
L’algorithme de Levinson s’ecrit alors sous la forme generale :
P0 = Rxx(0)
ki = − [Rxx(i)+∑i−1j=1 a
i−1j Rxx(i−j)]
Pi−1
aii = ki
aij = ai−1j + ki(ai−1i−j
)∗, 1 ≤ j ≤ i− 1
Pi = (1− |ki|2)Pi−1
(3.29)
ou i et j correspondent respectivement a l’ordre et au pas.
3.3.2 Exemple
On cherche a determiner un predicteur a 1 pas.
x(n) = A cos(nω0T + φ)
φ est une variable aleatoire uniformement repartie sur [0,2π].
Rxx(k) =A2
2cos(kω0T )
CERI Avignon Traitement du signal J.-P.Costa

168 Chapitre 3. Identification parametrique
Methode directe
Predicteur a 1 pas d’ordre 1
Le predicteur a 1 pas s’ecrit x(n|(n− 1)) = a11 x(n− 1).
L’erreur de prediction est egale a e = x(n)− (x)(n|(n− 1)) = x(n)− a11x(n− 1)
La variance de l’erreur de prediction est donnee par V = E[(x(n)− a11x(n− 1))
2]
La meilleure valeur du coefficient a11 est celle qui rend V minimale.
V = E[x2(n)− 2a11x(n)x(n− 1) + (a11)
2x(n− 1)2]
V = Rxx(0)− 2a11Rxx(1) + (a11)2Rxx(0)
On cherche ∂V∂a11
= 0 :
−2Rxx(1) + 2a11Rxx(0) = 0
a11 =Rxx(1)
Rxx(0)= cos(ω0T )
La variance dans ce cas vaut : V = A2
2sin2(ω0T ) ≤ A2
2
Predicteur a 1 pas d’ordre 2
Le predicteur a 2 pas s’ecrit x(n|(n− 1)) = a21 x(n− 1) + a22x(n− 2).
L’erreur de prediction : ε(n) = x(n)− x(n|(n− 1)) = x(n)− a21 x(n− 1) + a22x(n− 2)
La variance de l’erreur de prediction :
V = E[(x(n)− a21x(n− 1)− a22x(n− 2)
)2]On determine les coefficients a2i par la minimisation de variance pour chaque coefficients.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

3.3 Application a la prediction lineaire 169
∂V
∂a21= E
[−x(n− 1)(x(n)− a21x(n− 1)− a22x(n− 2))
]= 0
∂V
∂a21= Rxx(1)− a21Rxx(0)− a22Rxx(1) = 0
et
∂V
∂a22= E
[−x(n− 2)(x(n)− a21x(n− 1)− a22x(n− 2))
]= 0
∂V
∂a22= Rxx(2)− a21Rxx(1)− a22Rxx(0) = 0
On obtient le systeme suivant :
Rxx(0) Rxx(1)
Rxx(1) Rxx(0)
a21
a22
=
Rxx(1)
Rxx(2)
Ce qui equivaut a :
R a = r
Pour determiner les coefficients a2i , il suffit d’inverser la matrice R; on obtient alors :
a = R−1r
avec Rxx(0) = A2
2, Rxx(1) = A2
2cos(ω0T ), Rxx(2) = A2
2cos(2ω0T ),
On trouve :
a21
a22
=1
sin2(ωoT )
1 − cos(ωoT )
− cos(ωoT ) 1
cos(ωoT )
cos(2ωoT )
=
2 cos(ω0T )
−1
CERI Avignon Traitement du signal J.-P.Costa

170 Chapitre 3. Identification parametrique
Algorithme de Levinson
Predicteur a 1 pas d’ordre 1
i = 1
k1 = −Rxx(1)
Rxx(0)= cos(ω0T )
a1 = k1 = − cos(ω0T )
P0 = Rxx(0) =A2
2
P1 = (1− (k1)2)P0 = (1− cos(ω0T ))
A2
2
i = 2
k2 = −[Rxx(2) + a11Rxx(0)
P1
]= 1
P2 = (1− 1)P1 = 0
a22 = k2 = 1
a21 = a11 + k2a11 = −2 cos(ω0T )
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa

Bibliographie 171
[]
CERI Avignon Traitement du signal J.-P.Costa

172 Bibliographie
Bibliographie
[1] E. Rudolph, P.Graubmann, and J. Grabowski. Tutorial on message sequence charts
(MSC’96). In FORTE, 1996.
[2] ITU-TS. ITU-TS Recommendation Z.120: Message Sequence Chart (MSC). Geneva,
1997.
[3] Michel Goossens, Sebastian Rahtz, and Frank Mittelbach. The LATEX Graphics
Companion. Addison-Wesley, 1997.
[4] L. Lamport. LATEX—A Document Preparation System—User’s Guide and Reference
Manual. Adsison-Wesley, 2nd edition, 1994. Updated for LATEX 2ε.
[5] V. Bos and S. Mauw. A LATEX macro package for Message Sequence Charts—Reference
Manual—Describing version , June 2002. Included in MSC macro package distribution.
[6] V. Bos and S. Mauw. A LATEX macro package for Message Sequence Charts—User
Manual—Describing version , June 2002. Included in MSC macro package distribution.
[7] V. Bos and S. Mauw. A LATEX macro package for Message Sequence Charts—
Maintenance document—Describing version , June 2002. Included in MSC macro
package distribution.
CERI Avignon Transmission, Codage et Traitement du signal J.-P.Costa