Étude et simulation d un système de pompage d eau couplé à
TRANSCRIPT

UNIVERSITE LARBI BEN M’HIDI DE OUM ELBOUAGHI
FACULTE DES SCIENCES ET TECHNOLOGIE
DEPARTEMENT DES SCIENCES ET TECHNOLOGIE
FILIERE DE GENIE ELECTRIQUE
MEMOIRE DE FIN D’ETUDE
En vue d’obtention du
DIPLOME DE MASTER
Spécialités : GENIE ELECTRIQUE
Titre de mémoire :
Étude et simulation d’un système de pompage
d’eau couplé à un générateur photovoltaïque
Mémoire de fin d’étude soutenu publiquement à Oum El Bouaghi
Le : 22/06/2013
Par : Dirigé par :
Mr. AHMADI Ismail Mr. SAKRI Djamel
Mr. DERGHAL Abdellah
Année Universitaire : 2012-2013

REMERCIEMENTS
Avant tout je remercie Dieu Le tout puissant de m’avoir donné le courage, la volonté, la
patience, et la santé durant toutes ces années et que grâce à lui ce travail a pu être réalisé.
Je tiens à exprimer mes remerciements et ma gratitude à Mr. SAKRI Djamel et
DERGHAL Abdellah pour avoir assumé la responsabilité de m’encadrer, m’orienter et de me
conseiller tout au long de la réalisation de ce travail.
Je remercie vivement tous les enseignants et tous ceux à qui nous devons notre formation.
Des remerciements vont également à tous ceux qui, d’une quelconque façon, ont contribué à
l’élaboration de ce modeste travail.

SOMMAIRE
SOMMAIRE

Sommaire
Introduction Générale…………………………………………………………………………1
Chapitre I : Modélisation du générateur photovoltaïque
I.1 Introduction …………………………………………………………….…….… …….. . 6
I.2 Historique………………………………………………………………………….…….. 6
I.3 Rayonnement solaire…………………………………………………………………….... 7
I.3.1 Différents types de rayonnement solaire………………………………………………… 8
I.3.1.1 Rayonnement direct…………………………………………………………. 8
I.3.1.2 Rayonnement diffus…………………………………………………………. 8
I.3.1.3 Rayonnement solaire réfléchi………………………………………………… 8
I.3.1.4 Rayonnement global …………………………………………………………..8
I.4 Les systèmes photovoltaïques……………………………………………………………… 9
I.4.1 Systèmes autonomes………………………………………………………….. 9
I.4.2 Systèmes hybrides……………………………………………………………… 9
I.4.3 Systèmes photovoltaïques connectés au réseau………………………………. 9
I.5 Conversion photovoltaïque……………………………………………………………… 9
I.5.1 L’effet photovoltaïque………………………………………………………… 10
I.5.2 Principe de fonctionnement d’une cellule photovoltaïque…………………… 10
I.5.3. Cellule solaire 11
I.5.4 Différents types des cellules solaires…………………………………………...12
I.5.4.1 Cellule mono- cristalline……………………………………..…............... 12
I.5.4.2 Cellule poly-cristalline……………………………………………............12
I.5.4.3 Cellule amorphe..........................................................................................12
I.5.5 Silicium et ses propriétés………………………………………………………. 13
I.6 Nombre de cellules………………………………………………………………………. 13
I.6.1 Groupement des cellules photovoltaïques…………………………………….. 14
I.6.1.1 Groupement en séries ……………………………………………………….. 14

Sommaire
I.6.2.1 Groupement en parallèle……………………………………………………… 14
I.7 Générateur photovoltaïque……………………………………………………………….. 15
I.7.1 Modules photovoltaïques……………………………………………………… 15
I.7.2 Panneau photovoltaïque........................................................................................16
I.8 Avantages et inconvénients de l'énergie photovoltaïque………………………………… 16
I.8.1 Avantages ………………………………………………………………………. 16
I.8.2 Inconvénients :……………… …………………………………………………..17
I.9 Modélisation d’un générateur photovoltaïque…………………………………………. 17
I.9.1 Modélisation d’une cellule photovoltaïque…………………………………… 17
I.9.1.1 Cas idéal …………………………………………………………………….. 17
I.9.1.2 Cas réel……………………………………………………………………… 18
I.9.1.3 Courant de court-circuit………………………………………………………. 19
I.9.1.4 Tension à circuit ouvert………………………………………………………..20
I.9.1.5 Rendement d’une cellule solaire…………………………………………. 20
I.9.2 Caractéristique I(V) et P(V)……………………………………………………. 20
I.9.3 Modélisation d’un module photovoltaïque…………………………………………….. 21
I.9.4 Résultats de simulation ……………………………………………………………… 22
I.9.4.1 Caractéristique courant- tension, puissance – tension ……………………… 23
I.9.5 Influence de l’éclairement ……….…………………………………………………….. 23
I.9.6 Influence de la température ……………………………………………………………. 24
I.9.7. Influence de l’éclairement et la température ………………………………………….. 25
I.9.8. Influence de la résistance série ………………………………………………………. 26
I.9.9.Influence du facteur de qualité ……………………………………………………….. 27
I.10 Avenir du photovoltaïque ……………………………………………………………… 28
I.11.CONCLUSION…………………………………………………………………………. 29

Sommaire
Chapitre II Contrôle de l’énergie & poursuite du point de puissance maximum (MPPT)
II. Introduction……………………………………………………………………………….. 31
II.1. Convertisseurs DC/DC………………………………………………………………….. 31
II.2. Hacheur dévolteur (Buck)………………………………………………………………. 32
II.3. Hacheur survolteur (Boost)………………………………………………………………33
II.4. Hacheur dévolteur-survolteur (Buck-Boost)……………………………………………. 36
II.5. Commandes MPPT des convertisseurs DC-DC………………………………………… 37
II.5.1. Méthode de perturbation et d'observation (P&O)…………………………….38
II.5.3. Simulation de la méthode MPPT……………………………………………. 39
II.6. Recherche du point de fonctionnement optimal (MPPT) ……………………………… 40
II.7. La recherche du MPPT sous l’influence de l’éclairement ……………………………… 40
II.8. Recherche du MPPT sous l’influence de la température ………………………………. 41
II.9. Recherche du MPPT sous l’influence de la température et l’éclairement……………….42
II.10.Conclusion……………………………………………………………………………. 43
Chapitre III Modélisation et commande de l’ensemble moteur-pompe
III.1.Introduction……………………………………………………………………….……..45
III.2. Description d’un moteur à courant continu……………………………………………..45
III.3. Différents types de machines à courant continu………………………………………. 45
III.3.1. Moteur à excitation série…………………………………………………. 45
III.3.2. Moteur à excitation shunt (Dérivée)……………………………………… 45
III.3.3. Moteur à excitation compound (composée)………………………………. 45
III.3.4. Moteur à excitation séparée……………………………………………….. 46
III.3.5. Moteur à aimant permanent……………………………………………….. 46
III.4. Choix du moteur à courant continu…………………………………………………….. 46
III.5.Avantages et inconvénients des machines à courant continu…………………………… 46

Sommaire
III.6. Modélisation d’une MCC à excitation séparée (Indépendante)……………………….. 47
III.6.1. Mise en équation de la machine…………………………………………….. 47
III.6.2. Validation par simulation du modèle moteur-convertisseur……………….. 48
III.6.3. Fonction de transfert de la Partie mécanique……………………………….. 49
III.6.4 Equation de 2éme ordre ………………………………………………………49
III.7.Résultats de simulation…………………………………………………………………. 52
III.8. Pompe photovoltaïque…………………………………………………………………. 53
III.8.1. Pompage « au fil du soleil »…………………………………………………. 54
III.8.2.Pompage avec batteries………………………………………………………. 55
.III.9.Différentes types des pompes………………………………………………………….. 55
III.9.1.Pompe volumétrique…………………………………………………………..55
III.9.2 Pompe centrifuge…………………………………………………………….. 56
III.10.Fonctionnement d’une pompe centrifuge……………………………………………... 56
III.11.Utilisation des pompes centrifuges……………………………………………………..56
III.12.Avantages et Inconvénients des pompes centrifuges………………………………….. 57
III.12.1Avantages……………………………………………………………………. 57
III.12.2. Inconvénients ……………………………………………………………… 57
III.13. Modélisation de la pompe centrifuge…………………………………………………. 57
III.13.1. Pertes de charges linéaires…………………………………………………. 58
III.13.2. Pertes de charges singulières (locales)……………………………………… 58
III.13.3. Caractéristique Q (H) de la pompe…………………………………………. 59
III.13.4 Caractéristique couple vitesse C (ω) de la pompe……………………………59
III.13.5. Calcul de puissance ………………………………………………………… 59
III.13.6. Calcul du rendement…………………………………………………………60
III.14.Résultats de simulation………………………………………………………...61
III.14.Résultats de simulation de la chaine………………………………………….. 62

Sommaire
III.15. CONCLUSION ………………………………………………………………………. 63
Conclusion Générale…………………………………………………….……………………64

INTRODUCTION GENERALE
INTRODUCTION GENERALE

Introduction Générale
1
Introduction générale
La production d’énergie est un défi de grande importance pour les années à venir, en
effet les besoins énergétiques des pays industrialisés ne cessent d’augmenter, par ailleurs les
pays en voie de développement auront besoin de plus en plus d’énergie pour mener à bien leur
développement.
De nos jours, une grande partie de la production mondiale d’énergie est assurée à
partir des énergies fossiles, la consommation de ces sources donne lieu à des émissions de gaz
à effet de serre et donc une augmentation de la pollution. Le danger supplémentaire est qu’une
consommation excessive du stock de ressources naturelles réduit les réserves de ce type
d’énergie de façon dangereuse pour les générations futures, et aussi face aux multiples crises
économiques et pétrolières, la science s’est intéressée aux ressources dites renouvelables qui
constituent un secteur stratégique et occupent une place privilégiée dans les domaines de
recherche et développement.[2]
Aujourd’hui on distingue plusieurs sources d’énergies renouvelables, l’énergie hydro -
électrique, l’énergie géothermique, l’énergie de la biomasse, l’énergie éolienne et l’énergie
photovoltaïque (qui fera l’objet de ce travail). L’avantage principal de ces énergies
renouvelables est que leurs utilisations ne polluent pas l’atmosphère et elles ne produisent pas
de gaz à effet de serre comme le dioxyde de carbone et les oxydes d’azote qui sont
responsables du réchauffement de la terre [1].
Beaucoup de populations dans les zones rurales des pays en voie de développement
affrontent de grands problèmes dus au déficit en eau. Ces problèmes sont spécialement
accentués dans zones désertiques et semi -désertiques. Le déficit en eau dans les zones arides
et semi-arides est une question vitale pour les populations. L’amélioration des conditions de
vie dans ces zones est liée à la recherche des solutions adéquates à ce problème. Le pompage
solaire photovoltaïque (PV) représente la solution idéale pour l’approvisionnement en eau
partout où le réseau électrique est absent.
Généralement, les systèmes de pompage photovoltaïque sont constitués d’un générateur
photovoltaïque et un sous-système de pompage. Ces systèmes peuvent fonctionner au fil du
soleil sans stockage électrochimique. L’eau ainsi pompée peut être utilisée directement ou
stockée dans un réservoir pour des utilisations ultérieures. Ce type de stockage de l’eau est la
solution la plus adoptée par rapport au stockage électrochimique dans des batteries.
Introduction Générale
2
Le générateur photovoltaïque est responsable de la conversion instantanée de l’énergie
solaire en énergie électrique grâce à l’effet photovoltaïque. Le générateur photovoltaïque est
constitué de plusieurs modules photovoltaïques reliés en série et en parallèle selon la
puissance requise.
Le sous-système de pompage est composé d’un groupe moteur -pompe et un conditionneur
de puissance qui a pour rôle principal d’optimiser le transfert de la puissance entre le
générateur photovoltaïque et le groupe moteur -pompe. Le système de conditionnement de
puissance peut être un convertisseur DC/AC pour un moteur à courant alternatif ou un
convertisseur DC/DC pour un moteur à courant continu qui est notre cas.
Les moteurs à courant continu ont été les premiers à être utilisés dans les systèmes de
pompage parce qu’il offre un principal avantage d’être facilement commandables grâce au
découplage naturel du flux et du couple ; cependant la présence du collecteur et des balais à
toujours été un inconvénient.
Dans cette optique, l’objectif assigné à ce travail est l’étude d’un système de pompage
d’eau couplé à un générateur photovoltaïque. Pour atteindre ce but, ce mémoire est organisé
autour de trois chapitres :
Le premier chapitre sera consacré à la modélisation du module photovoltaïque en partant
du modèle de la cellule solaire, l’obtention des caractéristiques courant –tension et puissance
–tension et l’étude de l’influence des paramètres (température, ensoleillement, résistance
série, facteur de qualité,…) sur ces caractéristiques.
Dans le deuxième chapitre, on étudiera quelques types convertisseurs DC-DC utilisés
dans les systèmes photovoltaïques puis on présentera l’algorithme de la méthode "Perturb &
Observe" permettant de rechercher le point de puissance maximale des panneaux solaires. La
chaîne de conversion photovoltaïque (panneau solaire, hacheur, MPPT,) sera validée par
simulation.
Quant au dernier chapitre, il fera l’objet de l’étude de l’ensemble moto –pompe où on
exposera les résultats de simulation validant la chaîne complète.

Chapitre I Modélisation du générateur photovoltaïque
Chapitre I
Modélisation du Générateur
Photovoltaïque

Chapitre I Modélisation du générateur photovoltaïque
6
I.1 Introduction
Dans nos jours, il nous semble que personne ne peut s’en douter sur l’importance
de l’eau et de l’énergie pour les besoins humains. Avec les avancées technologiques, le
besoin en énergie ne cesse d’augmenter. Ce problème d’énergie est encore plus sensible
dans les sites isolés où l’utilisation des ressources classiques s’avère souvent très coûteuse.
En effet, plusieurs contraintes, comme le transport du combustible et les entretiens
périodiques des moteurs diesels, rendent la recherche d’une source d’énergie alternative
indispensable pour ce type de sites.
Comme nous le savons, la plus grande partie de l’énergie consommée actuellement
provient de l’utilisation des combustibles fossiles comme le pétrole, le charbon, le gaz
naturel ou encore l’énergie nucléaire. Les études et les prévisions récentes nous alertent
que l’utilisation massive de ces ressources conduira certainement à l’épuisement total de
ces réserves. En plus, tout le monde est mondialement convaincu par le danger de ce
processus sur l’environnement.
A partir de ce constat, il a été nécessaire de chercher d’autres ressources d’énergie
de remplacement. Les énergies renouvelables, comme l’énergie photovoltaïque, éolienne
ou hydraulique, représentent une solution de remplacement par excellence et elles sont de
plus en plus utilisées dans nos jours. Ce type d’énergie n’est pas seulement gratuit et
inépuisable, mais aussi très propre pour l’environnement. D’ailleurs, on parle souvent
d’une énergie « verte », puisqu’elle permet d’éviter totalement la pollution produite par les
sources traditionnelles [1].
I.2 Historique
Même si les bases théoriques de l’effet photovoltaïque étaient connues depuis le
début du siècle, le scientifique français, Edmond Becquerel, fut le premier à découvrir en
1839 l’effet photoélectrique. Il a trouvé que certains matériaux pouvaient produire une
petite quantité de courant sous l’effet de la lumière. Par la suite, Albert Einstein à
découvert, en travaillant sur l’effet photoélectrique, que la lumière n’avait pas qu’un
caractère ondulatoire, mais que son énergie était portée par des particules, les photons. Ce
n’est qu’à partir de 1954, dans les laboratoires de Bell Téléphone à New Jersey, que la
première cellule ayant un rendement raisonnable a été mise au point. Depuis la deuxième
moitié du siècle précédent, le processus de purification de monocristaux de silicium a été
réalisé.

Chapitre I Modélisation du générateur photovoltaïque
7
En 1956 Loferski publiait différentes tables de conversions de rendement
photovoltaïque pour tous les matériaux semi-conducteurs. Puis, c’est au début des années
70 que l’on a pu obtenir en laboratoire un rendement de 20 % en travaillant sur des cellules
de monocristal d’arsenic de gallium (GaAs). Le rendement est sensiblement inférieur
lorsque ces cellules se font à l’échelle industrielle. Aussi, des expériences ont été faites
avec des cellules composées de deux couches : Une de sulfure de cadmium (SCd) et une
autre de sulfure de cuivre (SCu2). Ces cellules présentent l’avantage d’utiliser très peu de
matière active et permettent un processus de fabrication plus simple. Cependant, leur faible
rendement ne permet pas de les utiliser à échelle industrielle.
La commercialisation des cellules solaires photovoltaïques a commencé dès
l’apparition du silicium monocristallin et elles occupent encore la première place du
marché. Plus tard, apparurent les matériaux poly-cristallins, de fabrication plus
économique, mais présentant encore de faibles rendements. Récemment se sont
commercialisées des cellules de silicium amorphe, utilisées pour des dispositifs de très
faible puissance.
Les premières applications pratiques de l’électricité photovoltaïque se firent dans
les véhicules spatiaux, permettant l’alimentation des équipements de commande, de
mesure, ou de retransmission de données. Ensuite, la production industrielle de premiers
panneaux ayant des applications terrestres domestiques a débuté. Bien qu’au début des
années 80, ces panneaux n’aient pas été suffisamment compétitifs pour la production à
grande échelle, ils ont tout de même permis l’électrification de logements isolés [2] .
I.3 Rayonnement solaire
Le soleil est une étoile parmi tant d’autres. Il a un diamètre de 1390000 km, soit
environ 50 fois celui de la terre. Il est composé à 80% d’hydrogène, 19 % d’hélium et 1%
d’un mélange de 100 éléments, soit pratiquement tous les éléments chimiques connus
depuis que Langevin et Perrin, s’appuyant sur la théorie de la relativité d’Einstein, ont émis
l’idée il y a une soixantaine d’années que c’est l’énergie de fusion nucléaire qui fournit au
soleil sa puissance, il est aujourd’hui admis que le soleil est une bombe thermonucléaire
hydrogène–hélium transformant chaque seconde 564 millions de tonnes d’hydrogène en
560 millions tonnes d’hélium, la réaction se faisant dans son noyau à la température
d’environ 25 millions de degrés Celsius. Ainsi, à chaque seconde, le soleil est allégé de 4
millions de tonnes dispersées sous forme de rayonnement. Sa lumière, à une vitesse de

Chapitre I Modélisation du générateur photovoltaïque
8
300000 km/s, met environ 8 minutes pour parvenir à la terre, sa distribution spectrale de
l’atmosphère présente un maximum pour une longueur d’onde d’environ 0.5μm, la
température de corps noir à la surface du soleil est d’environ 5780°k
Diamètre de soleil : Ds=1.39.109m.
Diamètre de la terre : Dt =1.27.107m.
Distance moyenne soleil-terre : Dms =1.5.1011m. [6]
I.3.1 Différents types de rayonnement solaire
Il y a quatre types de rayonnement
Rayonnement direct
Rayonnement reçu directement du soleil. Il peut être mesuré par un pyrhéliomètre.
Rayonnement diffus
Rayonnement provenant de toute la voûte céleste. Ce rayonnement est dû à
l’absorption et à la diffusion d’une partie du rayonnement solaire par l’atmosphère et à sa
réflexion par les nuages. Il peut être mesuré par un pyranomètre avec écran masquant le
soleil.
Rayonnement solaire réfléchi
Ou l’albédo du sol : le rayonnement qui est réfléchi par le sol ou par des objets se
trouvant à sa surface. Cet albédo peut être important lorsque le sol est particulièrement
réfléchissant (eau, neige).
Rayonnement global
La somme de tous les rayonnements reçus, y compris le rayonnement réfléchi par le
sol et les objets qui se trouvent à sa surface. Il est mesuré par un pyranomètre ou un
solarimètre sans écran. À noter que certains capteurs solaires concentrent le rayonnement
solaire afin d’augmenter le rendement du capteur par rapport à une surface donnée. Ces
capteurs à concentration ne peuvent utiliser que le rayonnement direct provenant du soleil.
Dans les endroits avec une forte proportion d’ensoleillement diffus, ces capteurs ne
peuvent pas fonctionner efficacement car l’ensoleillement diffus ne peut être concentré en
un point [5].

Chapitre I Modélisation du générateur photovoltaïque
9
I.4 Systèmes photovoltaïques
Les systèmes PV sont trois types :
I.4.1 Systèmes autonomes
C’est un système photovoltaïque complètement indépendant d’autre source
d’énergie et qui alimente l’utilisateur en électricité sans être connecté au réseau électrique
.Dans la majorité des cas, un système autonome exigera des batteries pour stocker l’énergie
.Ils servent habituellement à alimenter les maisons en site isolé, sur des îles, en montagne
ainsi qu’à des applications comme la surveillance à distance et le pompage de l’eau. En
règle générale, les systèmes PV autonomes sont installés là où ils constituent la source
d’énergie électrique la plus économique
I.4.2 Systèmes hybrides
Les systèmes hybrides reçoivent une partie de leur énergie d’une ou plusieurs
sources supplémentaires, qui sont également indépendants des réseaux de distribution
d’électricité. En pratique le générateur photovoltaïque est combiné à une éolienne ou à un
groupe électrogène à combustible, ou aux deux à la fois avec des accumulateurs de
stockage de l’énergie. Un tel système s’avère un bon choix pour les applications qui
nécessitent une alimentation continue d’une puissance assez élevée .Un système hybride
photovoltaïque optimise l’utilisation combinée de plusieurs sources d’énergies
renouvelables et, ou fossiles et des moyens de stockage associés
I.4.3 Systèmes photovoltaïques connectés au réseau
Le champ photovoltaïque est couplé directement au réseau électrique à l’aide d’un
convertisseur courant continu- courant alternatif (CC-CA). Etant donné que l’énergie est
normalement emmagasinée dans le réseau même, les accumulateurs ne sont pas nécessaires
à moins que vous ne vouliez une forme autonome d’énergie pendant les pannes
d’électricité.
L’énergie produite est consommée sur place le surplus étant injecté dans le réseau, qui
alimente les maisons de nuit ou pendant les jours sans soleil
I.5 Conversion photovoltaïque
La possibilité de transformer directement l’énergie lumineuse, et en particulier le
rayonnement solaire en énergie électrique est apparue en 1954 avec la découverte de l’effet

Chapitre I Modélisation du générateur photovoltaïque
10
photovoltaïque. Cet effet utilise les propriétés quantiques de la lumière permettant la
transformation de l’énergie incidente en courant électrique dont la cellule solaire ou
photopile, est l’élément de base de cette conversion photovoltaïque.
I.5.1 L’effet photovoltaïque
L’énergie photovoltaïque (PV) est la transformation directe de la lumière en
électricité. À l’encontre de l’énergie solaire passive, qui utilise les éléments structuraux
d’un bâtiment pour mieux le chauffer (ou le refroidir), et de l’énergie solaire active, qui
utilise un caloporteur (liquide ou gazeux) pour transporter et stocker la chaleur du Soleil
(on pense au chauffe-eau), l’énergie photovoltaïque n’est pas une forme d’énergie
thermique. Elle utilise une photopile pour transformer directement l’énergie solaire en
électricité .L’effet photovoltaïque, c’est-à-dire la production d’électricité directement de la
lumière, fut observé la première fois, en 1839, par le physicien français Edmond
Becquerel. Toutefois, ce n’est qu’au cours des années 1950que les chercheurs de la
compagnie Bell Telephone aux Etats-Unis, parvinrent à fabriquer la première photopile,
l’élément primaire d’un système photovoltaïque [10].
I.5.2 Principe de fonctionnement d’une cellule photovoltaïque
L’effet photovoltaïque utilisé dans les cellules solaires permet de convertir
directement l’énergie lumineuse des rayons solaires en électricité par le biais de la
production et du transport dans un matériau semi-conducteur de charges électriques
positives et négatives sous l’effet de la lumière. Ce matériau comporte deux parties, l’une
présentant un excès d’électrons et l’autre un déficit en électrons, dites respectivement
dopée de type n et dopée de type p. Lorsque la première est mise en contact avec la
seconde, les électrons en excès dans le matériau n diffusent dans le matériau p. La zone
initialement dopée n devient chargée positivement, et la zone initialement dopée p chargée
négativement. Il se crée donc entre elles un champ électrique qui tend à repousser les
électrons dans la zone n et les trous vers la zone p. Une jonction (dite p-n) a été formée. En
ajoutant des contacts métalliques sur les zones n et p, une diode est obtenue. Lorsque la
jonction est éclairée, les photons d’énergie égale ou supérieure à la largeur de la bande
interdite communiquent leur énergie aux atomes, chacun fait passer un électron de la bande
de valence dans la bande de conduction et laisse aussi un trou capable de se mouvoir,
engendrant ainsi un pair électron - trou.

Chapitre I Modélisation du générateur photovoltaïque
11
Si une charge est placée aux bornes de la cellule, les électrons de la zone n rejoignent les
trous de la zone p via la connexion extérieure, donnant naissance à une différence de
potentiel le courant électrique circule voir la Figure.1
Figure 1. Coupe transversale d’une cellule PV [3].
I.5.3. Cellule solaire
Une cellule photovoltaïque est un capteur constitue d’un matériau semi-conducteur
absorbant l’énergie lumineuse et la transformant directement en courant électrique. Le
principe de fonctionnement de cette cellule fait appel aux propriétés d’absorption du
rayonnement lumineux par des matériaux semi-conducteurs. Ainsi, le choix des matériaux
utilisés pour concevoir des cellules PV se fait en fonction des propriétés physiques de
certains de leurs électrons susceptibles d’être libérés de leurs atomes lorsqu’ils sont excités
par des photons provenant du spectre solaire et possédant une certaine quantité d’énergie
selon leurs longueurs d’onde. Une fois libérés, ces charges se déplacent dans le matériau
formant globalement un courant électrique de nature continu (DC). La circulation de ce
courant donne alors naissance à une force électromotrice (fem) aux bornes du semi-
conducteur correspondant ainsi au phénomène physique appelé effet photovoltaïque. La
figure 1 illustre la constitution d’une cellule photovoltaïque [4]
Chapitre I Modélisation du générateur photovoltaïque
12
I.5.4 Différents types des cellules solaires
Il existe trois types principaux de cellules solaires :
I.5.4.1 Cellule mono- cristalline
La cellule monocristalline qui s'approche le plus du modèle théorique : cette cellule est
effectivement composée d'un seul cristal divisé en deux couches. Les cellules
monocristallines permettent d'obtenir de hauts rendements, de l'ordre de 15 à 22 %.
Ces cellules souffrent néanmoins des inconvénients:
Méthode de production laborieuse et difficile, et donc, très chère.
Il faut une grande quantité d’énergie pour obtenir un cristal pur.
Une durée d'amortissement de l'investissement en énergie élevée (jusqu'à 7 ans) [5].
I.5.4.2 Cellule poly-cristalline
Les cellules poly-cristallines sont composées d'un agglomérat de cristaux. Elles
aussi proviennent du sciage de blocs de cristaux, mais ces blocs sont coulés et sont dès lors
hétérogènes.
Les cellules poly- cristallines est caractérisées par :
Coût de production moins élevé.
Nécessite moins d'énergie.
Rendement de 13 % et jusqu’à 20 % en labo
I.5.4.3 Cellule amorphe
Le silicium amorphe, apparu en 1976. Sa structure atomique est désordonnée, non
cristallisée, mais il possède un coefficient d'absorption supérieur à celui du silicium
Cristallin. Cependant, ce qu'il gagne en pouvoir d'absorption, il le perd en mobilité des
charges électriques (rendement de conversion faible).
Coût de production bien plus bas.
Rendement de seulement 5 % par module et de 14 % au laboratoire.
Fonctionne sous très faible éclairement.
Grâce à la technologie des nouveaux matériaux le tellurure de cadmium (Cd Te),
l’arséniure de gallium (Ga As) ainsi que le di séléniure de cuivre et d’indium (CIS) ont
permis d’obtenir des photopiles ayant des rendements 38 % au laboratoire [5] .

Chapitre I Modélisation du générateur photovoltaïque
13
I.5.5 Silicium et ses propriétés
Il existe différentes techniques permettant la conversion directe de la lumière
solaire en électricité. La plus connue est la conversion photovoltaïque effectuée à l'aide de
matériaux semi-conducteurs tel que le silicium (Si), le germanium (Ge), le sélénium (Se)
ou les composés semi-conducteurs tel que l'arséniure de gallium (GaAs), ou le tellurure de
cadmium
(CdTe). Les cellules solaires de type GaAs sont très coûteuses dans leur fabrication et leur
utilisation est aujourd'hui limitée aux applications spatiales.
La majorité des cellules photovoltaïques sont fabriquées à partir du silicium
cristallin, car il possède la caractéristique d'être non toxique contrairement au cadmium ou
au sélénium. En plus, il permet d'atteindre des efficacités de conversion remarquables. Le
silicium constitue environ 28% de l'écorce terrestre sous forme de composés (silicates,
silice), ce qui en fait une source quasi inépuisable.
I.6 Nombre de cellules
Une cellule au silicium cristallin présente une tension de circuit ouvert de 0.58 V à
0.60 V et un point de puissance maximale situé entre 0.46 V et 0.47 V. Considérant que
notre panneau doit pouvoir charger une batterie 12V jusqu'à sa tension maximale d'environ
14V et que l'on va perdre 2 à 3V en câblage et du fait des élévations de température, il faut
disposer d'un panneau fournissant au minimum 16-17V à sa puissance maximale. Si l'on
divise 16.5 par 0.46, on trouvera le nombre arrondi de 36, valeur courante comme nombre
de cellules en série des panneaux usuels du marché. Cela permet de disposer les photopiles
d'un module en 4 rangées de 9. En pratique, les modèles les plus courants de 12V
comportent 32 à 44 cellules, suivant la valeur exacte de la tension de chaque cellule et de la
température d'utilisation.
Par exemple, dans le désert de certain pays chauds où la température ambiante monte
jusqu'à 50°, on peut être amené à installer des panneaux 12V à 40 cellules. À raison de -
2mV/°C, chaque cellule perd 50 mV entre 25 et 50°C, et la tension de fonctionnement d'un
panneau 36 cellules chute de 1.8 V. Il faut donc théoriquement 4 cellules supplémentaires
pour y remédier (1.8/0.46=3.9) [8].

Chapitre I Modélisation du générateur photovoltaïque
14
I.6.1 Groupement des cellules photovoltaïques
I.6.1.1 Groupement en séries
Les cellules photovoltaïques peuvent se connecter en série. Les tensions de toutes
les cellules s'ajoutent et le courant est le même que celui d'une seule cellule Figure 2. C'est
pourquoi il faut toujours des cellules de même courant pour les mettre en séries. En
fabrication, on appelle cela l'appairage : on trie les cellules selon leur courant pour les
câbler en série. Si l'une d'elles était plus faible en courant, elle imposerait son courant à
toute la série ce qui pénaliserait le module complet.
Figure 2. Caractéristique de nombre des modules en série.
I.6.2.1 Groupement en parallèle
Lorsque les cellules sont connectées en parallèles, ce sont les courants qui s'ajoutent
et la tension qui restera constante Figure 3. Il faudra donc appairer les tensions et non les
courants, lors de la mise en parallèle des modules photovoltaïques pour constituer un
générateur plus puissant [2].
0 0.2 0.4 0.6 0.8 1 1.20
1
2
3
4
5
Tension (V)
Co
ura
nt
(A)
Ns =1
Ns =2

Chapitre I Modélisation du générateur photovoltaïque
15
Figure 3. Caractéristique de nombre des modules en parallèle.
I.7 Générateur photovoltaïque
L'interconnexion des modules entre eux, en série ou en parallèle, pour obtenir une
puissance plus grande, définit la notion de générateur photovoltaïque. Le générateur
photovoltaïque se compose de plusieurs modules et d'un ensemble de composants qui
adapte l'électricité produite par les modules aux spécifications des récepteurs
I.7.1 Modules photovoltaïques
La cellule individuelle, unité de base d'un system photovoltaïque, ne produit qu'une
très faible puissance électrique, typiquement de 1 à 3 W avec une tension de moins d'un
volt. Pour produire plus de puissance, les cellules sont assemblées pour former un module
(ou panneau). Les connections en série de plusieurs cellules augmentent la tension pour un
même courant, tandis que la mise en parallèle accroît le courant en conservant la tension.
La puissance crête, obtenue sous un éclairage maximal sera proportionnelle à la surface du
module. La rigidité de la face avant (vitre) et l’étanchéité sous vide offerte par la face
arrière soudée sous vide confèrent à l’ensemble sa durabilité
0 0.1 0.2 0.3 0.4 0.5 0.60
2
4
6
8
10
Tension (V)
Co
ura
nt
(A)
Np =1
Np =2

Chapitre I Modélisation du générateur photovoltaïque
16
Figure 4. Générateur photovoltaïque.
I.7.2 Panneau photovoltaïque
Afin d’obtenir des puissances de quelques KW à quelques MW, sous une tension
convenable, il est nécessaire d’associer les modules en série (augmenté la tension) et en
parallèle (augmenté le courant) pour former un panneau (ou champ PV).
La quantité d’électricité dans l’ensemble des composants du panneau PV dépend :
Des besoins en électricité
De la taille du panneau
De l’ensoleillement du lieu d’utilisation
De la saison d’utilisation [12].
I.8 Avantages et inconvénients de l'énergie photovoltaïque
Malgré les avantages qu'elle présente, l'énergie photovoltaïque présente certains
inconvénients qui peuvent être résumés comme suit :
I.8.1 Avantages
Les systèmes photovoltaïques ont plusieurs avantages:
Ils sont non polluants sans émissions ou odeurs discernables;
Ils peuvent être des systèmes autonomes qui fonctionnent sûrement, sans surveillance
pendant de longues périodes ;
Ils n'ont besoin d'aucun raccordement à une autre source d'énergie où à un
approvisionnement en carburant ;

Chapitre I Modélisation du générateur photovoltaïque
17
Ils peuvent être combinés avec d'autres sources d'énergie pour augmenter la fiabilité
de système ;
Ils peuvent résister à des conditions atmosphériques pénibles comme la neige et la
glace ;
Ils ne consomment aucun combustible fossile et leur carburant est abondant et libre ;
une haute fiabilité car l’installation ne comporte pas de pièces mobiles, ce qui la rend
particulièrement appropriée aux régions isolées, d’où son utilisation sur les engins
spatiaux ;
Le système modulaire de panneaux photovoltaïques permet un montage adaptable à
des besoins énergétiques variés ; les systèmes peuvent être dimensionnés pour des
applications allant du milliwatt au mégawatt.
La technologie photovoltaïque présente des qualités sur le plan écologiques car le
produit et non polluant, silencieux, et n’entraîne aucune perturbation du milieu.
Ils ont une longue durée de vie.
Les frais et les risques de transport des énergies fossiles sont éliminés [3].
I.8.2 Inconvénients
La fabrication des modules photovoltaïques relève de la haute technologie, ce qui
rend le coût très élevé.
le rendement réel d’un module photovoltaïque et de l’ordre de 10 à 15 % ;
ils sont tributaires des conditions météorologiques.
l’énergie issue du générateur photovoltaïque est continu et de faible voltage (< à 30
V) donc il doit être transformé par l’intermédiaire d’un onduleur.
beaucoup d’appareils vendus sur le marché fonctionnent avec du 230 V alternatif
[3].
I.9 Modélisation d’un générateur photovoltaïque
I.9.1 Modélisation d’une cellule photovoltaïque
I.9.1.1 Cas idéal
Une cellule photovoltaïque idéale peut être décrite de manière simple comme une
source idéale de courant qui produit un courant 𝐼𝑝ℎ proportionnel à la puissance lumineuse
incidente, en parallèle avec une diode. En addition au modèle idéal

Chapitre I Modélisation du générateur photovoltaïque
18
Figure 5. Schéma équivalent de modèle idéal.
Dans le cas de cellules solaires au silicium monocristallin, on considère
l’hypothèse d’une cellule idéale. Le facteur d’idéalité est alors considéré comme égal à
l’unité.
L’équation caractéristique est déduite d’une manière directe à partir de la loi de Kirchhoff
I = Iph − ID (I.1)
ID = I0(expV
VT− 1) (I.2)
𝐼0 = 𝐼0𝑟𝑒𝑓(
𝑇
𝑇𝑟𝑒𝑓)
3
∗ exp (−𝑞∗𝐸𝑔
𝑛∗𝑘) ∗ (
1
𝑇𝑟𝑒𝑓−
1
𝑇) (I.3)
D’où :
𝐼 = ID − I0(expV
VT− 1)
I0 :Le courant de saturation inversa d’une diode
𝐕𝐓 : La tension thermique
VT =n.K.T
q (I.4)
K : constante de Boltzman =1.381.10−𝟐𝟑
T : température absolue de la cellule
q: charge d’électrique élémentaire 1.6.10−19𝐴𝑠
n : facteur d’idéalité de la jonction
I.9.1.2 Cas réel
La performance d’une cellule solaire est limitée par l’influence de deux phénomènes
physiques assimilables à deux résistances𝑅𝑠 et 𝑅𝑝.

Chapitre I Modélisation du générateur photovoltaïque
19
𝑹𝒔: Résistance série, due essentiellement aux pertes par effets Joule à travers les grilles de
collectes et la résistance propre des semi-conducteurs, ainsi qu’aux mauvais contactes
(Semi-conducteur, électrodes).
𝑹𝒑 : Résistance parallèle, dite « Shunt », provient des pertes par recombinaisons dues
essentiellement à l’épaisseur, aux effets de surface, ainsi qu’au non idéalité de la jonction.
Figure 6. Schéma équivalent de modèle réal
I = Iph − ID − IRp (I.5)
𝐼:Le courant fournir par la cellule.
Le courant de jonction ID donnée par :
ID =I0 (expV+Rs.I
VT− 1) (I.6)
Le courant dans la résistance𝑅𝑝 est donné par :
IRp=
V+Rs.I
RP (I.7)
Remplaçons dans (I.4) les équations (I.2) et (I.3) l’équation caractéristique deviendra :
I = Iph − I0 (expV+Rs.I
VT− 1) −
V+Rs.I
RP (I.8)
I.9.1.3 Courant de court-circuit
Il s’agit du courant obtenu en court-circuitant les bornes de la cellule (en prenant
V= 0 dans le schéma équivalent). Il croît linéairement avec ’l’intensité d’illumination de la
cellule et dépend de la surface éclairée, de la longueur d’onde du rayonnement, de la
mobilité des porteurs et de la température.

Chapitre I Modélisation du générateur photovoltaïque
20
On peut écrire :
𝐼𝑐𝑐 (𝑉𝑐𝑐 = 0) = 𝐼𝑝ℎ (I.9)
I.9.1.4 Tension à circuit ouvert
La tension à circuit ouvert est obtenue quand le courant qui traverse la cellule est
nul .Elle dépend de la barrière d’énergie et de la résistance shunt. Elle décroît avec la
température et varie peu avec l’intensité lumineuse
On peut écrire :
𝑉𝑐𝑐 = 𝐿𝑛 (𝐼𝑝ℎ
𝐼0+ 1) . 𝑉𝑇 (I.10)
I.9.1.5 Rendement d’une cellule solaire
Le rendement est donné par le rapport de la puissance électrique maximale générée
à la puissance du rayonnement solaire incident.
ηc=Vmax.Imax
Psolaire (I.11)
I.9.2 Caractéristique I(V) et P(V)
Pour un éclairement, une température et des paramètres de la cellule donnés, la
relation du courant en fonction de la tension est donnée par l’équation (I.4), qui est une
équation non linéaire implicite et doit être résolue numériquement. Les caractéristiques
typiques courant tension et puissance-tension décrites par cette équation sont montrées
dans la Figure 7.
Figure 7. Caractéristique I (V) d’une cellule photovoltaïque.
0 0.1 0.2 0.3 0.4 0.5 0.60
1
2
3
4
5
Tension (V)
Co
ura
nt
(A)
G=1000 w/m2
T =250C

Chapitre I Modélisation du générateur photovoltaïque
21
Figure 8. Caractéristique P (V) d’une cellule photovoltaïque.
La caractéristique I(V) nous montre que la cellule PV est une source de courant constant
pour des faibles valeurs de la tension avec un courant approximativement égal au courant
de court-circuit (Icc). Avec l’augmentation de la tension, le courant commence à diminuer
exponentiellement jusqu'à la valeur zéro où la tension est égale à la tension de circuit
ouvert (Vco).
I.9.3 Modélisation d’un module photovoltaïque
La conversion photovoltaïque est la transformation directe de l'énergie du
rayonnement solaire en énergie électrique, sous forme de courant continu directement
utilisable. Le générateur photovoltaïque est un ensemble de modules connectés série ou
parallèle afin d'obtenir une puissance et une tension désirées. L'élément de base est la
cellule solaire (rappelons que le modèle en une seule exponentielle est non linéaire et
implicite), donc une solution itérative sera déterminée par la méthode de Newton-Raphson,
ainsi la connaissance des données fournies par le constructeur sont nécessaire. Le circuit
est composé de (courant photodiode, une résistance série Rs plus faible et une diode, en
néglige la résistance parallèle)
I = Iph − ID (I.12)
ID = I0 (expV+Rs.I
Vt− 1) (I.13)
I = Iph − I0 (expV+Rs.I
Vt− 1) (I.14)
Les grandeurs électriques du GPV sont données sous la forme suivante.
0 0.1 0.2 0.3 0.4 0.5 0.60
0.5
1
1.5
2
2.5
3
Tension (V)
Pu
issa
nce
(w
)
G =1000 w/m2
T =250C

Chapitre I Modélisation du générateur photovoltaïque
22
Imodule = I′ph − I′0 (expV′+R′s.I
Vt′− 1) (I.15)
I′ph = Np ∗ Iph (I.16)
I′0 = Np ∗ I0 (I.17)
𝑉′ = 𝑁𝑠 ∗ 𝑉 (I.18)
Vt′ = Ns ∗ Vt (I.19)
R′s =NS
Np∗ Rs (I.20)
𝑁𝑆 : Nombre de cellule en série.
𝑁𝑝 : Nombre de cellule en parallèle.
I.9.4 Résultats de simulation
Nous avons fait une étude d’un panneau photovoltaïque simple du module BP
MSX62 de BP Solaire sous l’environnement Matlab /Simulink ® 7.10 et nous avons
déduit les caractéristiques suivantes.
Figure 9. Schéma bloc d’un module_ PV

Chapitre I Modélisation du générateur photovoltaïque
23
I.9.4.1 Caractéristique Courant- Tension et Puissance – Tension
Figure 10. Caractéristique courant-tension
Figure 11. Caractéristique puissance-tension
I.9.5 Influence de l’éclairement
Par contre du cas précédant, lorsque nous avons maintenu une température
constante (25°C) à différents éclairements ( 400W /m2,600W /m2,800W /m2, 1000W /m2)
on remarque que l’accroissement du courant de court-circuit est beaucoup plus important
que l’augmentation de la tension de circuit ouvert, car le courant de court-circuit (Icc) est
une fonction linéaire de l’éclairement et la tension du circuit ouvert (Voc) est une fonction
logarithmique voire figure (12) et (13).
0 5 10 15 20 250
1
2
3
4
5
Tension (V)
Co
ura
nt
(A)
G =1000 w/m2
T =250C
0 5 10 15 20 250
10
20
30
40
50
60
70
80
Tension (V)
Pu
issa
nce (
W)
G=1000 w/m2
T =25 0 C
Chapitre I Modélisation du générateur photovoltaïque
24
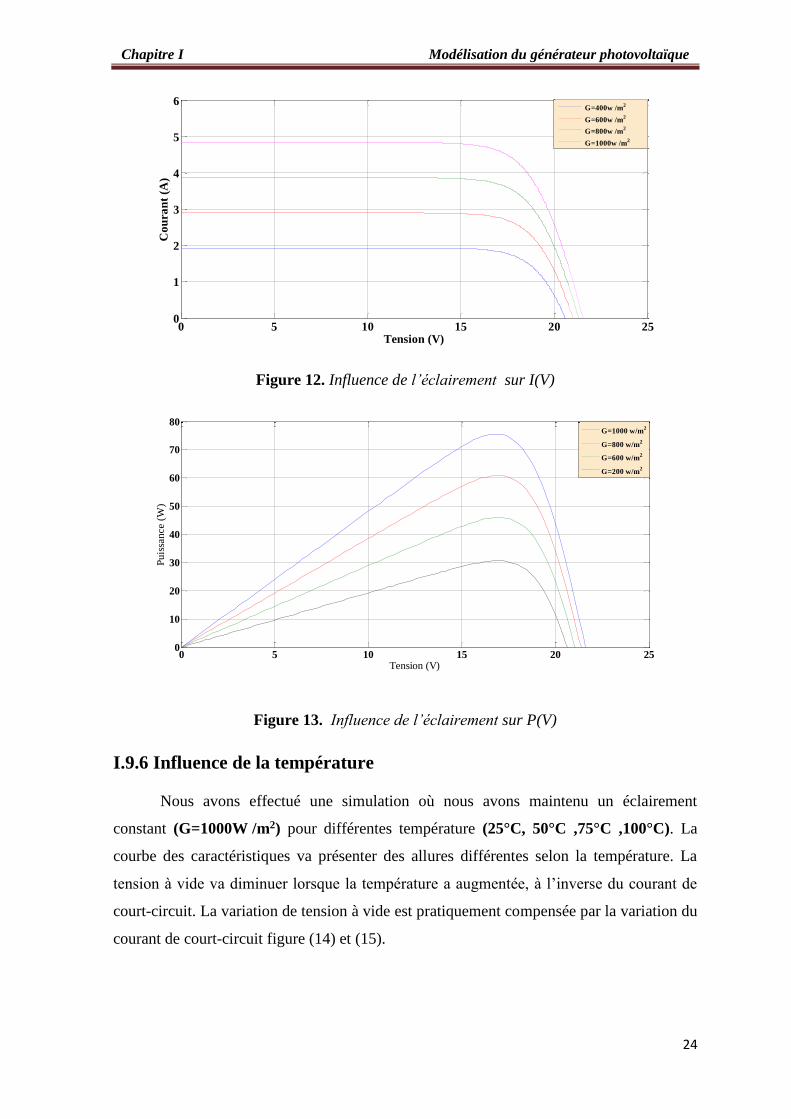
Figure 12. Influence de l’éclairement sur I(V)
Figure 13. Influence de l’éclairement sur P(V)
I.9.6 Influence de la température
Nous avons effectué une simulation où nous avons maintenu un éclairement
constant (G=1000W /m2) pour différentes température (25°C, 50°C ,75°C ,100°C). La
courbe des caractéristiques va présenter des allures différentes selon la température. La
tension à vide va diminuer lorsque la température a augmentée, à l’inverse du courant de
court-circuit. La variation de tension à vide est pratiquement compensée par la variation du
courant de court-circuit figure (14) et (15).
0 5 10 15 20 250
1
2
3
4
5
6
Tension (V)
Co
ura
nt
(A)
G=400w /m2
G=600w /m2
G=800w /m2
G=1000w /m2
0 5 10 15 20 250
10
20
30
40
50
60
70
80
Tension (V)
Pu
issa
nce (
W)
G=1000 w/m2
G=800 w/m2
G=600 w/m2
G=200 w/m2

Chapitre I Modélisation du générateur photovoltaïque
25
Figure 14. L’influence de la température sur la caractéristique I (V)
Figure 15. L’influence de la température sur la caractéristique P (V)
I.9.7 Influence de l’éclairement et la température
La variation de la température et de l’éclairement en même temps (400W /m2et
25°C, 600W /m2et 50°C, 800W /m2et 75°C, 1000W /m2et 100°C), nous a permet de
conclure qu’il y a une petite variation de la tension du circuit-ouvert (Voc), par contre il y a
une grande variation du courant (Icc), voire figure (16) et (17)
On remarque aussi que la puissance délivrée par un générateur photovoltaïque dépend
beaucoup plus de la variation de l’éclairement que la variation de la température.
0 2 4 6 8 10 12 14 16 18 20 220
1
2
3
44
5
Tension (V)
Co
ura
nt
(A)
T=25 0 C
T=50 0 C
T=75 0 C
T=100 0 C
0 5 10 15 20 250
10
20
30
40
50
60
70
80
Tension(V)
Pu
issa
nce (
W)
T =25 0 C
T =50 0 C
T =75 0 C
T =100 0 C

Chapitre I Modélisation du générateur photovoltaïque
26
Figure 16. Influence de l’éclairement et de la température sur I(V)
Figure 17. Influence de l’éclairement et de la température sur P(V)
I.9.8 Influence de la résistance série
La résistance série agit sur la pente de la caractéristique dans la zone où la
photodiode qui se comporte comme un générateur de tension, et lorsqu’elle est élevée, elle
diminue la valeur du courant de court-circuit (Icc) voir figure (18) et (19).
0 5 10 15 20 250
1
2
3
4
5
6
Tension (V)
Co
ura
nt
(A)
G =400 w/m2,T =25
0 C
G =600 w/m2,T =50
0 C
G =800 w/m2,T =75
0 C
G =1000 w/m2,T =100
0 C
0 5 10 15 20 250
10
20
30
40
50
60
70
80
90
Tension (V)
Pu
issa
nce
(w
)
G =400 w/m2 , T = 25
0 C
G =600 w/m2 , T = 50
0 C
G =800 w/m2 , T = 75
0 C
G =1000 w/m2 , T = 100
0 C

Chapitre I Modélisation du générateur photovoltaïque
27
Figure18. Influence de la résistance série sur I(V)
Figure 19. Influence de la résistance série sur P(V)
I.9.9 Influence du facteur de qualité
L’augmentation du facteur de qualité de la diode influe inversement sur le point de
puissance maximale et cela se traduit par une baisse de puissance au niveau de la zone de
fonctionnement voir figure (20) et (21).
0 5 10 15 20 250
1
2
3
4
5
Tension(V)
Co
ura
nt
(A)
5 m ohm
3.4 m ohm
2 m3 ohm
0.6 m ohm
0 5 10 15 20 250
10
20
30
40
50
60
70
80
90
Tension (V)
Pu
issa
nce (
w)
0.2 m ohm
2 m ohm
3.4 m ohm
5 m ohm

Chapitre I Modélisation du générateur photovoltaïque
28
Figure 20. Influence du facteur de qualité sur I(V)
Figure 21.Influence du facteur de qualité sur P(V)
I.10 Avenir du photovoltaïque
Source d'énergie 100% propre et faible pour des usages très variés, elle figurera à
l'avenir parmi les principales sources mondiales. Son handicap majeur reste un coût encore
élevé comparée aux sources conventionnelles et aux filières renouvelables. Ce coût
diminue de 10% par an, et pour accélérer cette baisse, les autorités nationales et
internationales doivent engagés une politique de soutien à long terme de la filière
photovoltaïque. C'est précisément l'objectif des programmes lancés depuis quelques années
dans plusieurs pays industrialisés. Dans notre pays, l'application du PV reste encore
modeste. La première utilisation été dans le domaine des télécommunications. Après,
certain puits dans les hauts plateaux ont été équipés par des systèmes de pompages PV. A
0 5 10 15 20 250
1
2
3
4
5
Tension (V)
Co
ura
nt
(A)
A=1
A=1.5
A=2
0 5 10 15 20 250
10
20
30
40
50
60
70
80
90
Tension (v)
Pu
issa
nce
(w
)
A=1
A=1.5
A=2

Chapitre I Modélisation du générateur photovoltaïque
29
nos jours, quelques dizaines de village saharien de la région de Tamanrasset et Adrar
jouissent des avantages de cette source d'énergie.
I.11.CONCLUSION
Dans ce chapitre, les cellules et le module solaires ont été modélisés et validés par
simulation dans un environnement Matlab –Simulink.
Les résultats aboutis ont montré clairement l’effet direct des conditions
météorologiques (éclairement et température) sur la puissance fournie par un module
solaire.

Chapitre II Contrôle de l’énergie & poursuite du point de puissance maximum (MPPT)
Chapitre II
Contrôle de l’énergie & poursuite du
point de puissance maximum (MPPT)

Chapitre II Contrôle de l’énergie & poursuite du point de puissance maximum (MPPT)
31
II.1 Introduction
La puissance délivrée par un GPV dépend fortement du niveau d’ensoleillement, de
la température des cellules, de l’ombrage et aussi de la nature de la charge alimentée. Elle
est de ce fait très imprévisible. Comme nous l’avons déjà vu dans le chapitre précédent, la
courbe caractéristique de puissance du GPV présente un point de puissance maximale MPP
(Maximum Power Point) correspondant à un certain point de fonctionnement de
coordonnées VMPP pour la tension et IMPP pour le courant. Vu que la position du MPP
dépend du niveau d’ensoleillement et de la température des cellules, elle n’est jamais
constante dans le temps. Pour que le module fournisse sa puissance maximale disponible, il
faut une adaptation permanente de la charge avec le générateur photovoltaïque.
Cette adaptation pourra être réalisée par l’insertion d’un convertisseur DC-DC
contrôlé par un mécanisme de poursuite «Maximum Power Point Tracking».[10 11 13 14].
Un convertisseur MPPT (Maximum Power Point Tracker) doit donc être utilisé afin de
suivre ces changements. Un convertisseur MPPT est un système de conversion de
puissance muni d’un algorithme de contrôle approprié permettant d’extraire le maximum
de puissance que le GPV peut fournir.
Les premières utilisations du MPPT remontent à 1968 dans le cadre d’applications
spatiales ayant pour générateur électrique des panneaux photovoltaïques. Le
développement du MPPT a constitué un thème techniquement attrayant, si bien que
finalement, un grand nombre de procédures et techniques ont été développés. Elles varient
en complexité, capteurs nécessaires, vitesse de convergence, coût, efficacité, matériel pour
la réalisation,……etc.
II.2 Convertisseurs DC/DC
Les hacheurs sont des convertisseurs de type continu-continu permettant de
contrôler la puissance électrique dans des circuits fonctionnant en courant continu avec une
très grande souplesse et un rendement élevé [13].
Le hacheur se compose de condensateurs, d’inductance et de commutateurs. Dans
le cas idéal, tous ces dispositifs ne consomment aucune puissance active, c’est la raison
pour laquelle on a de bons rendements dans les hacheurs [13].

Chapitre II Contrôle de l’énergie & poursuite du point de puissance maximum (MPPT)
32
II.2.1 Hacheur dévolteur (Buck)
Le convertisseur dévolteur peut être souvent trouvé dans la littérature sous le nom
de hacheur Buck ou hacheur série. La Figure 1 présente le schéma de principe du
convertisseur dévolteur [13]. Son application typique est de convertir sa tension d’entrée
en une tension de sortie inférieure, où le rapport de conversion change avec le
rapport cyclique du commutateur.
Figure 1. Convertisseur dévolteur réel.
(a) Interrupteur position u= 1 (b) Interrupteur position u= 0
Figure 2. Circuit topologies de convertisseur dévolteur.
Si on considéré que l’interrupteur est dans la position u=1 et appliquant les lois de
Kirchhoff au circuit on obtient les équations suivantes :
(II.1)
(II.2)
La position u=0
(II.3)
(II.4)

Chapitre II Contrôle de l’énergie & poursuite du point de puissance maximum (MPPT)
33
En comparant les deux situations on peut obtenir un seul modèle unifie qui est :
(II.5)
(II.6)
Le modèle moyen du convertisseur dévolteur est décrit par
(II.7)
(II.8)
En utilisant la normalisation
(II.9)
(II.10)
(II.11)
II.2.2 Hacheur survolteur (Boost)
Ce dernier est un convertisseur survolteur, connu aussi sous le nom de « boost » ou
hacheur parallèle ; son schéma de principe de base est celui de la figure 3. Son application
typique est de convertir sa tension d’entrée en une tension de sortie supérieure.
Figure 3. Convertisseur survolteur réel
(a) Interrupteur position u= 1 (b) Interrupteur position u= 0
Figure 4. Circuit topologies de convertisseur survolteur.

Chapitre II Contrôle de l’énergie & poursuite du point de puissance maximum (MPPT)
34
Lorsque la fonction de commutation est u=1 on obtient la dynamique suivante
(II.12)
(II.13)
Lorsque la fonction de commutation est u=0 on obtient la dynamique suivante
(II.14)
(II.15)
Alors la dynamique du convertisseur est décrite par le système bilinéaire suivant
(II.16)
(II.17)
En utilisant la normalisation
(II.18)
On obtient alors le modèle moyen normalisé suivant :
(II.19)
(II.20)
II.2.2.1 Simulation du convertisseur statique Boost
Pour simuler le comportement du convertisseur statique, nous avons utilisé
Simulink et le package SimPowerSystems. Le modèle de simulation du convertisseur
Boost est illustré sur la Figure 5. Les composants utilisés dans ce modèle sont idéaux
(chute de tension aux bornes de la diode nulle, résistance série équivalente de l’inductance
et du condensateur nulles, pas de pertes par commutation dans les semi-conducteurs). Le
bloc mesure du courant permet de visualiser le courant à travers l’inductance.
Les paramètres de simulation d’un convertisseur survolteur sont donnés dans le tableau
suivant :

Chapitre II Contrôle de l’énergie & poursuite du point de puissance maximum (MPPT)
35
R C ( F) L(H) Vin D
30
0.01 100 0.5
Tableau 1. Paramètres de simulation d’un hacheur Boost
Figure 5. Modèle de simulation du convertisseur Boost.
II.2.3 Résultats de simulation
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
50
100
150
200
250
Temp (sec)
Tensi
on (
V)
Figure 6. Valeur moyenne de la tension de sortie du hacheur Boost
Ces résultats montrent que la tension de sortie d’hacheur survolteur est supérieure à
celle d’entrée. Donc l’hacheur survolteur effectue correctement son rôle.

Chapitre II Contrôle de l’énergie & poursuite du point de puissance maximum (MPPT)
36
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.010
0.2
0.4
0.6
0.8
1
Temp (sec)
Am
pli
tude
Figure 7. Signal commande DC/DC (gâchette d’hacheur).
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.010
0,2
0,4
0,6
0,8
1
Temp (sec)
Figure 8. Ondes de tension de la modulatrice
II.2.4 Hacheur dévolteur-survolteur (Buck-Boost).
Le convertisseur dévolteur-survolteur combine les propriétés des deux
convertisseurs précédents, il est utilisé comme un transformateur idéal de n’importe quelle
tension d’entrée pour n’importe quelle tension de sortie désirée ; son schéma de base est
illustré par la Figure 9 [13].
Figure 9. Convertisseur dévolteur-survolteur réel

Chapitre II Contrôle de l’énergie & poursuite du point de puissance maximum (MPPT)
37
(a) Interrupteur position u= 1 (b) Interrupteur position u= 0
Figure 10. Circuit topologies de convertisseur Buck-Boost
En appliquant les lois de Kirchhoff aux circuits de la figure 10. (a.b) on obtient le modèle
suivant :
(II.21)
(II.22)
On obtient alors le modèle moyen normalisé suivant :
(II.23)
(II.24)
II.3 Commandes MPPT des convertisseurs DC-DC
D’une manière générale et selon le type d’implémentation électronique, les
commandes MPPT peuvent être classifiées en analogique, numérique ou mixte. Il est
cependant plus intéressant de les classifier selon le type de recherche qu’elles effectuent et
selon les paramètres d’entrée de la commande du MPPT. Bien qu’il existe un grand
nombre de publications scientifiques qui présentent des commandes du MPPT plus ou
moins complexes [11 13].
La Figure 11 montre le diagramme synoptique d’un système photovoltaïque, avec
un module MPPT qui a pour entrées la tension et le courant de sortie du module [4]. Dans
la plupart des cas, on fait une maximisation de la puissance fournie par le module solaire.
Ces méthodes sont basées sur des algorithmes de recherche itérative pour trouver le point
de fonctionnement du module solaire pour que la puissance générée soit maximale sans
interruption de fonctionnement du système. Elles ne sont pas basées sur des valeurs de

Chapitre II Contrôle de l’énergie & poursuite du point de puissance maximum (MPPT)
38
références prédéfinies ou à partir des paramètres opérationnels, mais sur la maximisation
permanente de la puissance générée par les modules photovoltaïque PV.
La puissance extraite du module est calculée à partir des mesures de courant I et de la
tension V du module et la multiplication de ces deux grandeurs .
Figure 11. Diagramme synoptique d’un système photovoltaïque avec un module MPPT
II.3.1 Méthode de perturbation et d'observation (P&O)
La méthode de perturbation et observation (P&O) est une approche largement
répandue dans la recherche de MPPT parce qu'elle est simple et exige seulement des
mesures de tension et du courant du panneau photovoltaïque VPV et IPV respectivement,
elle peut dépister le point maximum de puissance même lors des variations de
l’éclairement et de la température [11].
Comme son nom l’indique, la méthode P&O fonctionne avec la perturbation de la
tension VPV et l’observation de l'impact de ce changement sur la puissance de sortie du
panneau photovoltaïque.
La figure 12 représente l'algorithme de la méthode P&O. À chaque cycle, Vpv et Ipv sont
mesurés pour calculer Ppv(k). Cette valeur de Ppv(k) est comparée à la valeur Ppv(k-1)
calculée au cycle précédent.

Chapitre II Contrôle de l’énergie & poursuite du point de puissance maximum (MPPT)
39
Si la puissance de sortie a augmenté, Vpv est ajustée dans la même direction que
dans le cycle précédent. Si la puissance de sortie a diminué, Vpv est ajustée dans la
direction opposée que dans le cycle précédent. Vpv est ainsi perturbée à chaque cycle de
MPPT.
Quand le point de puissance maximale est atteint, Vpv oscille autour de la valeur
optimale Vop, Ceci cause une perte de puissance qui augmente avec le pas de
l’incrémentation de la perturbation. Si ce pas d'incrémentation est large, l'algorithme du
MPPT répond rapidement aux changements soudains des conditions de fonctionnement.
D'autre part, si le pas est petit, les pertes, lors des conditions de changements
atmosphériques lents ou stables, seront inférieures mais le système ne pourra pas répondre
rapidement aux changements rapides de la température ou de l'éclairement. Le pas idéal est
déterminé expérimentalement en fonction des besoins [8].
Figure 12. Organigramme de la méthode MPPT « perturbation-observation » [1]

Chapitre II Contrôle de l’énergie & poursuite du point de puissance maximum (MPPT)
40
Si une augmentation brutale de l’ensoleillement est produite, on aura une
augmentation de la puissance du panneau.
L’algorithme précédent réagit comme si cette augmentation est produite par l’effet
de perturbation précédente, alors il continu dans la même direction qui est une mauvaise
direction, ce que l’éloigne du vrai point de puissance maximale. Ceci cause un retard de
réponse lors des changements soudains de fonctionnement et des pertes de puissance [14].
Pour remédier à l’inconvénient majeur de la déviation de cette méthode lors de la
recherche du MPP durant l’augmentation rapide des niveaux d’insolation, une version
améliorée de cet algorithme est proposée, où on introduit une nouvelle condition dans la
branche « Oui » de condition ∆P(k) >0 dans la structure de l’organigramme de l’algorithme
de P&O [10 11 14].
II.4 Simulation de la Méthode MPPT « Perturb & Observ »
Figure 13. Schéma block de la commande P&O
II.5 Recherche du point de fonctionnement optimal (MPPT)
Pour que le système photovoltaïque soit optimisé et fonctionne au point maximal de
la puissance, il faut intégrer un MPPT qui a pour rôle de détecté ce point et oblige le
système d’opérer précisément sur ce dernier dont le fonctionnement est optimal. Le point
maximum de puissance est habituellement contrôlé par deux variables de commande. La
tension ou la puissance est à chaque fois mesurée est employée à nouveau dans une boucle
pour déterminer si le module solaire est au point de puissance maximale. Quand le système
emploie comme paramètre la tension, il règle le module solaire à une tension spécifique

Chapitre II Contrôle de l’énergie & poursuite du point de puissance maximum (MPPT)
41
qui devrait donner le point maximum de la puissance, ce point dépend de la température et
de l’éclairement.
Notre étude nous permettra de calculer la puissance maximale du module
photovoltaïque et d’obtenir le point optimal de fonctionnement du modèle soit sous
l’influence de la température soit sous l’influence de l’éclairement soit sous l’influence des
deux. A l’aide du logiciel Matlab version 7.10, on a utilisé une méthode sous forme d’un
code programme qui peut rechercher de ce point et la courbe idéale suivi par le MPP
durant le changement de la température et de l’éclairement.
II.5.1 Caractéristique Tension-Courant I(V)
0 2 4 6 8 10 12 14 16 18 20 220
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Tension (V)
Cou
rant
(A)
* MPPT
II.5.2 Caractéristique Tension-Puissance P(V)
0 2 4 6 8 10 12 14 16 18 20 220
10
20
30
40
50
60
70
80
90
Tension (V)
Puiss
ance
(w)
* MPPT
Figure 14. Recherche du point de fonctionnement optimal (MPPT)

Chapitre II Contrôle de l’énergie & poursuite du point de puissance maximum (MPPT)
42
II.6 Influence de l’éclairement et de la température
0 200 400 600 800 1000 12000
2
4
6
8
10
12
14
16
18
20
22
Eclairement (w /m2)
Ten
sion
opt
imal
e (
V)
75 0 C
25 0 C
50 0 C
100 0 C
Figure 15. Caractéristiques Tension optimale-Eclairement à des températures différentes
0 200 400 600 800 1000 12000
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Eclairement (w / m2)
Cou
rant
opt
imal
(A)
T= 25 0 C
T= 50 0 C
T= 75 0 C
T= 100 0 C
Figure 16. Caractéristiques courant optimal-Eclairement à des températures différentes
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
Eclairement (W /m 2)
puis
sanc
e m
axim
ale
(W)
T= 25 0 C
T= 50 0 C
T= 75 0 C
T= 100 0 C
Figure 17. Caractéristiques Puissance maximale- Eclairement à des températures
différentes

Chapitre II Contrôle de l’énergie & poursuite du point de puissance maximum (MPPT)
43
0 2 4 6 8 10 12 14 16 18 20 220
1
2
3
4
5
6
Tension (V)
Coura
nt
(A)
MPP
R =2.21 ohmR =3.81 ohm
R =7.97 ohm
Figure 18. Convergence MPPT vers le point optimal pour R=7.91ohm et R= 2.21ohm
II.7 Interprétations des résultats
On constate que le courant optimal est très sensible à l’éclairement. Par contre la
tension optimal varie très peut avec l’éclairement et diminue légèrement avec la
température.
Aussi, on considère en première approximation que le fonctionnement optimal du
générateur PV correspond sensiblement à un fonctionnement à tension optimale constante.
A partir de la figure 17, on peut dire que la puissance maximale est très sensible à
l’éclairement. Cependant cette puissance maximale diminue légèrement avec la
température en particulier pour les forts éclairements.
II.8 Conclusion
Dans ce chapitre, nous avons entamé la partie la plus importante de cette étude. Il
s’agit de la description du convertisseur MPPT qui est un convertisseur de puissance
(DC/DC) commandé par un algorithme MPPT. Nous avons expliqué le principe de
recherche du MPP. Ensuite, nous avons étudié de manière approfondie le fonctionnement
d’un convertisseur de type Boost. En fin, nous avons faire une analyse théorique montre
que le choix optimal par la méthode P&O présentée est particulièrement approprié où les
variations rapides de l’éclairement se produisent en raison des conditions climatiques.

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
Chapitre III
Modélisation et commande de
l’ensemble moteur-pompe

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
45
III.1 Introduction
Dans nos jours, la demande d'eau est de plus en plus très importante, en particulier
dans les zones rurales et les sites isolés où l’accès à l’énergie classique est difficile voir
pratiquement impossible. Ce phénomène a fait qu'un intérêt grandissant est porté sur
l'utilisation des générateurs photovoltaïques comme nouvelle source d'énergie.
La réalisation d’un système de pompage photovoltaïque autonome, fiable et à bon
rendement, constitue une solution pratique et économique au problème du manque d'eau, en
particulier, dans les régions désertiques. En effet, un système photovoltaïque devient
intéressant lorsqu’il est facile à installer, avec une autonomie acceptable et une excellente
fiabilité de service.
III.2 Description d’un moteur à courant continu
Un moteur à courant continu est une machine électrique. Il s'agit d'un convertisseur
électromécanique permettant la conversion bidirectionnelle d'énergie entre une installation
électrique parcourue par un courant continu et un dispositif mécanique, d’où l'énergie
électrique est transformée en énergie mécanique.
III.3 Différents types de machines à courant continu
III.3.1 Moteur à excitation série
Le circuit d’excitation est placé avec l’induit du moteur. Sa particularité est d’avoir un
inducteur qui est traversé par le même courant, l’inducteur possède donc une résistance plus
faible que celle des autres types de machines. L’inducteur est en série avec l’induit une seule
source d’alimentation suffit. On change le sens de rotation en permutant les connexions de
l’induit et de l’inducteur.
III.3.2 Moteur à excitation shunt (Dérivée)
L’enroulement d’excitation est connecté en parallèle sur l’alimentation du moteur, il
possède les mêmes propriétés que le moteur à excitation séparée du fait que, dans les deux
cas, l’inducteur constitue un circuit extérieur à celui de l’induit.
III.3.3 Moteur à excitation compound (composée)
C’est une combinaison des excitations Shunt et Série, on peut réaliser un compound-
age additif (Si les flux des deux enroulements s’additionnent) ou soustractif (dans le cas
contraire).

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
46
III.3.4 Moteur à excitation séparée
Ce mode d’excitation nécessite deux sources d’alimentations distinctes.
L’alimentation de l’enroulement inducteur est prise sur une source indépendante de la source
principale. On change le sens de rotation en permutant les bornes de l’induit ou de l’inducteur.
III.3.5 Moteur à aimant permanent
Ce type de moteur ressemble à celui d’excitation séparée néanmoins l’inducteur est un
aimant permanent.
III.4 Choix du moteur à courant continu
Le choix d’un moteur à courant continu doit permettre l’entraînement de la machine
accouplée avec les performances imposées par le cahier des charges à savoir :
Le nombre de quadrants de fonctionnement ;
Le couple sur toute la plage de vitesse : caractéristique 𝐶𝑟 = 𝑓(Ω) ;
La vitesse maximum / minimum ;
L’accélération et la décélération maximum ;
La qualité, la précision et la dynamique du couple et de la vitesse ;
Et le respect des normes pour le réseau d’alimentation énergétique :
La consommation d’énergie réactive ;
Le taux d’harmoniques imposé au réseau ;
La compatibilité électromagnétique, [16].
III.5 Avantages et inconvénients des machines à courant continu
Les machines à courant continu présentent des avantages très importants surtout les
moteurs. Ils sont moins polluants et moins bruyants, ils démarrent seuls et facilement, facilité
d’emploi dans le cas de démarrage fréquent, régularité du couple utile, possibilité d’inversion
du sens de rotation sans intervention de dispositifs mécaniques.
Les machines à courant continu ont des avantages mais aussi des inconvénients. Ces
inconvénients sont :
Ils ont une partie fragile (considérée comme point faible des machines à courant
continu), cette partie est le collecteur et les ballais, il faut changer les ballais de temps en
temps pour assurer le meilleur contact.
Chapitre III Modélisation et commande de l’ensemble moteur-pompe
47
Le prix d’un moteur à courant continu est plus de deux fois celui d’un moteur triphasé
asynchrone de même puissance, [18].
III.6. Modélisation d’une MCC à excitation séparée (Indépendante)
La modélisation de la machine à courant continu en régime transitoire permet
notamment de mettre en évidence certains phénomènes qui apparaissent lors du
fonctionnement de la machine tels que : le démarrage, le freinage, la réaction d’induit, la
commutation, la variation de la vitesse,…etc.
Considérons un moteur à courant continu à flux constant obtenu par excitation
séparée. Ce type d’excitation nous permet d’obtenir une commande en vitesse relativement
simple qui s’opère par action sur la tension de l’induit.
III.6.1 Mise en équation de la machine
La modélisation de l’ensemble moteur + charge est réalisable à partir des équations de
base de la machine à courant continu et de la relation fondamentale de la dynamique.
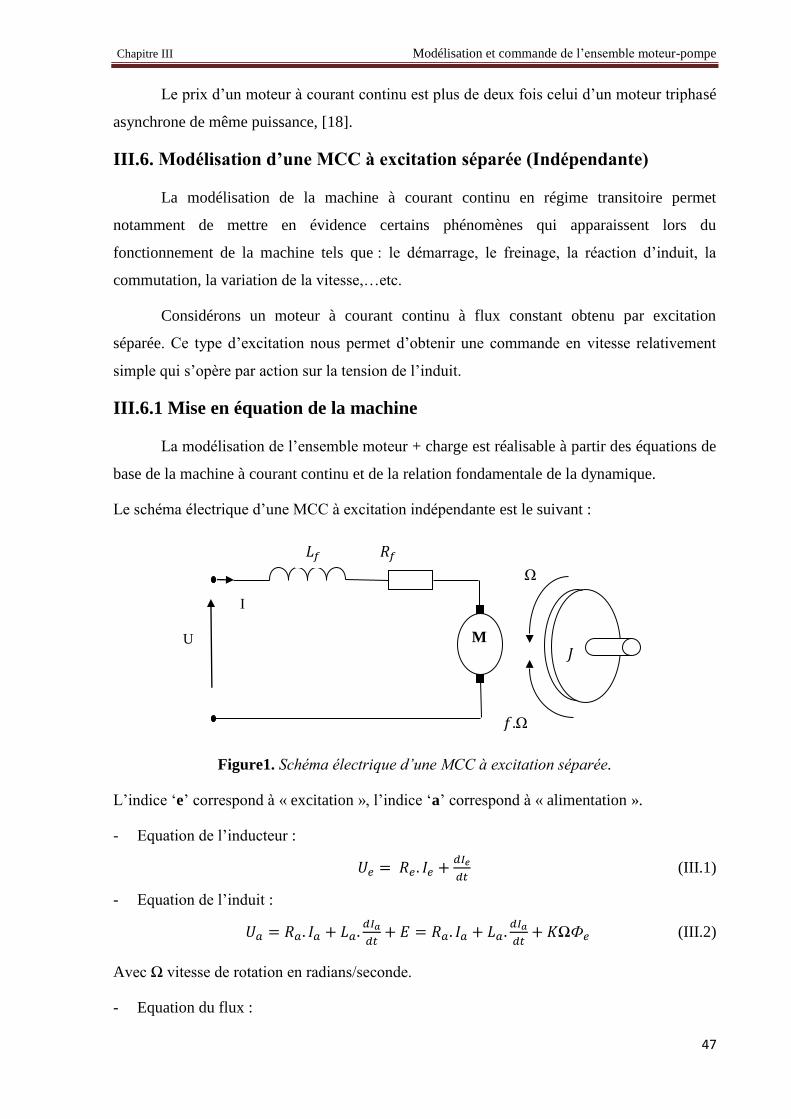
Le schéma électrique d’une MCC à excitation indépendante est le suivant :
Figure1. Schéma électrique d’une MCC à excitation séparée.
L’indice ‘e’ correspond à « excitation », l’indice ‘a’ correspond à « alimentation ».
- Equation de l’inducteur :
𝑈𝑒 = 𝑅𝑒 . 𝐼𝑒 +𝑑𝐼𝑒
𝑑𝑡 (III.1)
- Equation de l’induit :
𝑈𝑎 = 𝑅𝑎. 𝐼𝑎 + 𝐿𝑎.𝑑𝐼𝑎
𝑑𝑡+ 𝐸 = 𝑅𝑎. 𝐼𝑎 + 𝐿𝑎 .
𝑑𝐼𝑎
𝑑𝑡+ 𝐾ΩФ𝑒 (III.2)
Avec Ω vitesse de rotation en radians/seconde.
- Equation du flux :
M
I
U
𝑅𝑓
𝐿𝑓
𝐽
Ω
𝑓.Ω

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
48
On réalise une simulation simple ou le flux est toujours une fonction linéaire de
courant d’excitation et donc ou on néglige les effets de la saturation :
Ф𝑒 = 𝑀𝑒𝑎. 𝐼𝑒 (III.3)
- Equation du couple :
On l’obtient à partir de la puissance électromagnétique :
𝑃𝑒 = 𝐼𝑎 . 𝐸 = 𝐼𝑎 . 𝐾ΩФ = 𝐶𝑒Ω (III.4)
Ce qui donne :
𝐶𝑒 = 𝐾. 𝐼𝑎. Ф (III.5)
- Equation mécanique :
𝐶𝑒 − 𝐶𝑟 = ∑ 𝑗𝑑Ω
𝑑𝑡+ 𝑓. Ω (III.6)
Où c’est le couple électromagnétique, Cr le couple résistant imposé par la charge, ∑ 𝑗 le
moment d’inertie total (machine + charge entrainée) et f le frottement proportionnel à la
vitesse de rotation.
III.6.2 Validation par simulation du modèle moteur-convertisseur.
L'ensemble moteur–charge est réalisable à partir des équations de base de la machine à
courant continu et du principe fondamental de la dynamique. Les équations des tensions de
l’induit et celle du couple moteur sont représentées par la fonction de transfert de la partie
électrique :
La tension d'induit du moteur est écrite sous la forme :
𝑉(𝑡) = 𝐸(𝑡) + 𝑅𝑖(𝑡) + 𝐿𝑑𝑖(𝑡)
𝑑𝑡 (III.7)
Puis le couple est écrit sous la forme :
𝐶𝑒(𝑡) = 𝐶𝑟(𝑡) + 𝑓Ω(𝑡) + 𝐽𝑑Ω(𝑡)
𝑑𝑡 (III.8)
Avec :
E(t) = KФΩ(t) (III.9)
Ce(t) = KФi(t) (III.10)
En appliquant la transformation de Laplace :
V(p) = E(p) + Ri(p) + L. P. i(p) (III.11)
Ce(p) = Cr(p) + fΩ(p) + J. P. Ω(p) (III.12)
Et d’autre part :
E(p) = K Ф Ω(p) (III.13)

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
49
Ce(p) = K Ф i(p) (III.14)
D'où :
𝐾𝑝ℎ𝑖=𝐾Φ (III.15)
A partir de l’équation de tension d’induit, nous obtenons :
i(p) =V(p)−E(p)
R+L.P=
V(p)−E(p)
R(1+L
RP)
(III.16)
La fonction de transfert de la partie électrique est écrite comme suit :
PR
L
R
PEPU
PIPG
a
a
a
d
d
1
/1
)()(
)()(1 (III.17)
i(p) = V(p)−E(p)
R
1+τe.P (III.18)
Avec : 𝜏𝑒 = 𝐿
𝑅 constant de temps électrique de l’induit.
III.6.3 Fonction de transfert de la Partie mécanique
Ce calcul est généralement réalisé à partir de principe fondamental de la dynamique appliqué
en rotation :
A partir de l’équation mécanique, nous obtenons :
Ω(p) =Ce(p)−Cr(p)
f+J.P=
Ce(p)−Cr(p)
f(1+J
f.P)
(III.19)
Ω(𝑝) =
𝐶𝑒(𝑝)−𝐶𝑟(𝑝)
𝑓
1+𝜏𝑚.𝑃 (III.20)
III.6.4 Equation de 2éme ordre
En se basant sur le schéma bloc du modèle de la MCC, nous pouvons écrire la relation
suivante :
Figure2. Schéma bloc du Modèle de moteur électrique en vitesse.

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
50
(En utilisant le théorème de superposition et les théorèmes de fonctionnement)
Ω(p) =G1(p)
1+G1(p)H1(p)U(p) −
G2(p)
1+G2(p)H2(p)Cr(p) (III.21)
Avec :
G1(p) =K
Rf
(τe.p+1)(τm.p+1) (III.22)
H1(p) = K (III.23)
G2(p) =1
f
τm.p+1 (III.24)
H2(p) =K2
R
τe.p+1 (III.25)
Par application :
Ω(𝑝) =
KRf
(τe.p+1)(τm.p+1)
1+
K2
Rf(τe.p+1)(τm.p+1)
U(p) −
1f
τm.p+1
1+
1f
τm.p+1
K2
Rτe.p+1
𝐶𝑟(𝑝) (III.26)
La fonction de transfert associée à U possède les caractéristiques suivantes :
Si l’on néglige pour le moment le couple résistant, nous obtenons :
Ω(𝑝)
𝑈(𝑝)=
KRf
(τe.p+1)(τm.p+1)
1+
K2
Rf(τe.p+1)(τm.p+1)
(III.27)
Par simplification :
Ω(p)
U(p)=
K
Rf
(τe.p+1)(τm.p+1)+K2
Rf
(III.28)
Ω(p)
U(p)=
K
(R.f.τe.τm)P2+(R.f)(τe+τm)P+(R.f+K2) (III.29)

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
51
Ω(p)
U(p)=
K
R.f+K2
(R.f.τe.τm
R.f+K2 )P2+(R.f(τe+τm)
R.f+K2 )P+1 (III.30)
En introduisant les fonctions de transfert des différentes parties du moteur, nous pouvons
établir le schéma fonctionnel de la figure suivante :
Figure 3. Schéma-bloc du modèle de moteur à courant continu.
III.7 Résultats de simulation
(a)
Em
CeIa
3Ce2Ia
1
Vitesse
1
J.s+f
1
L.s+R
Kf
Kf
2 Cr
1
V
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
10
20
30
40
50
60
70
80
Temps (sec)
Cou
rant
(A)
Figure 4. Schéma bloc en du processus : moteur – charge

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
52
(b)
(c)
Figure 5 abc. Réponse la vitesse, le courant et le couple de la MCC en marche à vide
(d)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
50
100
150
200
250
Tems (sec)
Vit
esse
(ra
d /s
)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
10
20
30
40
50
60
70
80
Tems (sec)
Cou
ple
(N.m
)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
10
20
30
40
50
60
70
80
Temps (sec)
Cou
ple
(N.m
)

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
53
(e)
(f)
Figure 6.def .Réponse de vitesse, de courant et de couple de la MCC en marche avec charge
Interprétation
A vide : La machine atteint sa vitesse au bout de 0.18 seconde.
Le couple fait un pic au démange puis se stabilise à une valeur de 0.665N.m pour
compenser le couple de frottement.
Le courant est l’image du couple et à presque la même valeur car 𝐾∅ = 1.0665
En charge : La machine atteint la vitesse de 225 (rad /s) puis diminue et se stabilise par
l’effet de la charge.
Le couple après un régime transitoire, il tend à compenser la charge.
Le courant est l’image du couple c. à. d il se stabilise à la valeur de 19.32 A.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
10
20
30
40
50
60
70
80
Temps (sec)
Cou
rant
(A
)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
50
100
150
200
250
Temps (sec)
Vit
esse
(ra
d /s
)

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
54
III.8. Pompe photovoltaïque
Une pompe est une machine pour convertir la puissance d'entrée mécanique en
puissance liquide de rendement. Elle est couplée directement au moteur et elle est caractérisée
par un couple, vitesse, débit. Une bonne adaptation entre la pompe et le moteur mène à de
bons résultats.
On appelle pompe tout appareil qui aspire un fluide d'une région à basse pression pour
le refouler vers une région à plus grande pression. Ainsi, d'après cette définition on peut dire
que le rôle de la pompe consiste à augmenter la pression du fluide. L'augmentation de la
pression du liquide véhiculé par la pompe a eu lieu suite à la transformation de l'énergie
mécanique fournie par un moteur entraînant cette pompe en une augmentation de l'énergie
hydraulique qui est acquise par le liquide entre l'entrée et la sortie de la pompe.
Le volume de l'eau pompée dépend de quatre facteurs essentiels :
• Le niveau de rayonnement qui est une mesure de l'énergie disponible du soleil.
• Le générateur photovoltaïque.
• L'efficacité de conversion de la rangée photovoltaïque.
• La température ambiante.
Une pompe photovoltaïque se présente fondamentalement de deux façons selon qu’elle
fonctionne avec ou sans batterie. Alors que cette première utilise une batterie pour stocker
l’électricité produite par les modules, la pompe sans batterie, plus communément appelée
≪pompe au fil du soleil≫, utilise un réservoir pour stocker l’eau jusqu’au moment de son
utilisation, [19].
III.8.1 Pompage « au fil du soleil »
Comme on va le constater, la méthode de pompage « au fil du soleil » permet d’avoir
un système photovoltaïque plus simple, plus fiable et moins coûteux qu’un système utilisant
des batteries pour stocker de l’énergie d’abord. En effet, dans cette première technique, c’est
l’eau elle-même qui est pompée et stockée lorsqu’il y a suffisamment d’ensoleillement. On
parle alors d’un stockage hydraulique. L’eau est stockée dans un réservoir à une hauteur au-
dessus du sol pour qu’elle soit, au besoin ensuite, distribuée par gravité. Il faut bien signaler
ici que le réservoir d’eau peut souvent être construit localement. En plus, il ne requiert pas un
entretien complexe et peut être réparé localement. La capacité de stockage peut varier d’un à
plusieurs jours selon les modèles. [13]

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
55
III.8.2 Pompage avec batteries
La méthode de pompage d’eau en utilisant l’énergie stockée sur des batteries peut avoir
l’avantage de garantir une stabilité d’alimentation des équipements (système présente
l'avantage d'un débit régulier, la possibilité de pomper lorsque le soleil est absent). L’énergie
emmagasinée pour être utilise aussi pour d’autres besoins ultérieures. L’inconvenant majeur,
voir handicapant, de cette technique est qu’elle comporte plusieurs composants qui influent
négativement sur la fiabilité et le coût global du système. En effet, les batteries sont fragiles et
sont souvent les premiers éléments qui auront besoin d’être changés. Elles nécessitent, en
outre, un entretien constant et un contrôle rigoureux de leur charge et décharge. Les
contrôleurs utilisés pour régulariser la charge et la décharge des batteries vieillissent
rapidement et peuvent s’avérer non fiables. Les batteries introduisent également un certain
degré de perte de rendement d’environ 20% à 30 % de la production d’énergie. [13]
III.9 Différentes types des pompes
Les pompes à eau sont habituellement classées selon leur principe de fonctionnement,
soit de type volumétrique ou centrifuge. A part ces deux classifications on distingue
également deux autres types de pompes en fonction de l’emplacement physique de la pompe
par rapport à l’eau pompée : la pompe à aspiration et la pompe à refoulement.
La hauteur d’aspiration de n’importe quelle pompe est limitée à une valeur théorique de 9,8
mètres (pression atmosphérique en mètres d’eau) et dans la pratique à 6 ou 7 mètres. [4], [20].
III.9.1 Pompe volumétrique
La pompe volumétrique transmet l’énergie cinétique du moteur en mouvement de va-
et-vient permettant au fluide de vaincre la gravité par variations successives d’un volume
raccordé alternativement à l’orifice d’aspiration et à l’orifice de refoulement.
Les pompes volumétriques incluent les pompes à vis, les pompes à palettes, les pompes à
piston et les pompes à diaphragme. Les deux derniers types sont utilisés dans les puits ou les
forages profonds (plus de 100 mètres).L’entraînement est habituellement assuré par un arbre
de transmission très long, à partir d’un moteur électrique monté en surface.
Le débit d’eau d’une pompe volumétrique est proportionnel à la vitesse du moteur.
Mais son couple varie essentiellement en fonction de la hauteur manométrique totale (HMT)
et est pratiquement constant en fonction de la vitesse de rotation du moteur. Le couple de
démarrage est donc pratiquement indépendant du débit et sera proportionnel à la HMT. La
puissance consommée sera proportionnelle à la vitesse. C’est pourquoi ces pompes sont

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
56
habituellement utilisées pour les puits et les forages à grandes profondeurs et à petits débits
d’eau. On les utilise parfois comme pompes de surface lorsque le couple est lent et irrégulier
et que le débit demandé est faible, par exemple pour les pompes à main et les pompes
éoliennes multi-pales, [17].
III.9.2 Pompe centrifuge
La pompe centrifuge est conçue pour une hauteur manométrique totale (HMT)
relativement fixe.
Le débit de cette pompe varie en proportion de la vitesse de rotation du moteur. Son couple
augmente très rapidement en fonction de cette vitesse et la hauteur de refoulement est
fonction du carré de la vitesse du moteur. La vitesse de rotation du moteur devra donc être
très rapide pour assurer un bon débit. La puissance consommée, proportionnelle à Q. HMT,
variera donc dans le rapport du cube de la vitesse. On utilisera habituellement les pompes
centrifuges pour les gros débits et les profondeurs moyennes ou faibles (10 à 100 mètres), [4],
[20].
III.10 Fonctionnement d’une pompe centrifuge
La théorie des fonctionnements des pompes centrifuges montre qu’entre l’entré et la
sortie de la roue, l’énergie mécanique totale de la veine fluide est augmenté, cette
augmentation provient d’une part d’un accroissement de l’énergie de pression et aussi d’un
accroissement de l’énergie cinétique, cette dernière est transformée en énergie de pression par
ralentissement progressif qui est obtenue dans une pièce placés à l’intérieur de la roue
appelles limaçon, celle-ci se termine par un cône divergent.
III.11 Utilisation des pompes centrifuges
Les pompes centrifuges sont très utilisées pour les applications avec énergie
photovoltaïque parce que le moteur peut fournir une vitesse de rotation rapide à peu près
constante. De plus, l’exhaure de l’eau domestique fait traditionnellement à partir de puits, à
des profondeurs de 10 à 50 mètres, qui conviennent bien aux pompes centrifuges à étages
multi-pales. Ces pompes peuvent également s’adapter à de petits forages, ce qui permet de
capter les nappes phréatiques profondes qui ont souvent un niveau d’eau dynamique entre 30
et 100 mètres.
Les pompes centrifuges solaires sont aussi utilisées pour l’irrigation de petits
maraîchages lorsque la HMT est faible, c’est-à-dire à partir d’un plan d’eau de surface, telle
une rivière, et où la demande en eau est élevée

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
57
III.12 Avantages et Inconvénients des pompes centrifuges
III.12 1Avantages :
Construction simple en général, une seule pièce en mouvement « le rotor ».
Prix peu élevé.
Encombrement réduit.
Jeu assez large, donc facilité de manipuler des liquides contenant des solides en
suspension.
Entretien en général peu coûteux.
Peu d’influence de l’usure ou de la corrosion sur les caractéristiques.
Très large gamme de qualités matières suivant le service requis.
Grand flexibilité d’utilisation.
Ajustement automatique du débit à la pression.
Puissance absorbée limitée, donc sans danger.
III.12.2 Inconvénients :
Limitation de la viscosité.
En fait, la pompe centrifuge est limitée pratiquement à des viscosités de
l’ordre de 100cSt (centistokes) et son rendement chute rapidement au-delà de cette
valeur.
Débit légèrement instable, dans les basses valeurs : difficulté de contrôler le débit
Les pompes centrifuges présentent beaucoup d’avantages (simple, coût, faible maintenance et
elle est disponible dans une large gamme de puissance)
III.13 Modélisation de la pompe centrifuge
Le fonctionnement d’une pompe centrifuge met en jeu 3 paramètres, la hauteur, le
débit et la vitesse ayant pour équation [8]
𝑓(𝐻, 𝑄, 𝜔) = 0
Pour résoudre ce système d’équation, on considère l’un des 3 paramètres constant, en
générale c’est la vitesse qui est constante. La hauteur totale du pompage est la somme de la
hauteur statique et la hauteur dynamique.
𝐻 = 𝐻𝑠 + 𝐻𝑑 (III.31)

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
58
H : Hauteur totale du pompage.
Hs : Hauteur statique qui est la distance entre le niveau statique de l’eau dans le puits jusqu’au le
point le plus élevées auquel on doit pomper l’eau.
Hd : est la somme des pertes linéaires et singulières, ces pertes sont :
III.13.1 Pertes de charges linéaires
Ce sont des pertes d’eau dans la tuyauterie est donnée par la formule suivante [31]
∆𝐻1 = 𝛾𝐿𝑣2
𝐷2.𝑔 (III.32)
𝛾 : Coefficient de pertes de charges linéaires
D : Diamètre de la tuyauterie (m).
L : Longueur de la tuyauterie (m).
g : Accélération de la pesanteur (m/𝑠2).
𝑣 : Vitesse moyenne du fluide (m/s) qui est donnée par :
𝑣 =4.𝑄
𝜋.𝐷2 (III.33)
Q : débit (𝑚3/h).
∆𝐻1 = 𝛾𝐿
𝐷(
8.𝑄2
𝜋2𝐷4𝑔) (III.34)
On remarque que les pertes de charges linéaires sont proportionnelles à la longueur
des canalisations, ces pertes diminuent quand on augmente le diamètre de la canalisation.
III.13.2 Pertes de charges singulières (locales)
Sont dues essentiellement aux divers changements de section est donnée par
l’expression suivante, [19] :
∆𝐻2 = 𝜀𝑣2
2𝑔= 𝜀
8.𝑄2
𝜋2𝐷2𝐺 (III.35)
𝜀 : Coefficient de pertes de charges locales.
La hauteur dynamique est la somme des deux pertes
𝐻𝑑 = ∆𝐻1 + ∆𝐻2 (III.36)
𝐻𝑑 = (𝛾𝐿
𝐷+ 𝜀) (
8𝑄2
𝜋2𝐷4𝑔) = 𝐾𝑓𝑟 ∗ 𝑄2 (III.37)
𝐾𝑓𝑟: Constante de la canalisation

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
59
La hauteur totale de pompage est :
𝐻 = 𝐻𝑠 + 𝐾𝑓𝑟 . 𝑄2 (III.38)
III.13.3 Caractéristique Q (H) de la pompe
La relation liant la hauteur d’eau H avec le débit de la pompe Q est donnée par le
modèle de ≪PELEIDER-PETERMANN ≫.
𝐻 = 𝑎0 ∗ 𝜔2 − 𝑎1 ∗ 𝜔 ∗ 𝑄 − 𝑎2 ∗ 𝑄2 (III.39)
Avec𝑎0 ;𝑎1;𝑎2sont des constantes de la pompe donnée par le constructeur.
Figure 7. Caractéristique H=f (Q) de la pompe.
III.13.4 Caractéristique couple vitesse C (ω) de la pompe
La pompe centrifuge est caractérisée principalement par un couple résistant qui est de
la forme suivante :
𝐶𝑟 = 𝐾𝑃. 𝜔2 (III.40)
Avec
𝐾𝑃 =𝑃𝑚
𝜔3 (III.41)
III.13.5 Calcul de puissance
Une pompe est une machine qui fournit de l’énergie à un fluide en vue de son
déplacement d’un point à un autre. L’expression générale de la puissance hydraulique est
donnée comme suit :
𝑃𝐻 = 𝜌 𝑔 𝑄 𝐻 (𝑤) (III.42)
L’autre expression a considéré est celle de la puissance absorbée par une pompe, c’est à dire
la puissance nécessaire pour son entraînement mécanique, qui est exprimé par la relation
suivante :
𝑃𝑚 = 9.81. 𝜌. 𝑄. 𝐻 𝜂𝑝(𝑤)⁄ (III.43)
0 5 10 15 20 250
5
10
15
20
25
30
35
40
45
Débit (m3 / h)
Hau
teur
(m)

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
60
Ou 𝜂𝑝 : Le rendement de la pompe.
𝑃𝑚 ∶ Puissance mécanique du moteur.
𝜌 : La masse volumique de l’eau (=1000Kg au 𝑚3).
III.13.6 Calcul du rendement
Pour les groupes électropompes (pompe + moteur), les fabricants donnent généralement la
courbe du rendement globale.
𝜂𝑚𝑝 =𝑃𝐻
𝑃𝑎 (III.44)
III.13.7 Modèle de la pompe utilisé en simulation
𝑸𝟏 = 𝑸 ∗𝑵𝟏
𝑵 , 𝑯𝟏 = 𝑯 ∗ (
𝑵𝟏
𝑵)
𝟐 (III.45)
Avec Q et Q1, les débits correspondants respectivement à la vitesse N et N1 ; H et H1
les hauteurs manométriques totales correspondantes respectivement à la vitesse N et N1 .
Notons que Q et H sont donnés par le constructeur.
La Figure.7 présente le modèle de la pompe centrifuge basé sur les équations mathématiques
précédentes.
Figure 7 : Bloc SIMULINK de la pompe centrifuge

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
61
III.14.Résultats de simulation de la Moto-pompe
Figure 9. Schéma bloc d’une croupe Moto-pompe
Figure 10. Débit de la pompe Q(t).
Figure 11. Vitesse du rotor ω(t)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5
10
15
20
25
Temp (sec)
Déb
it (m
3 / h)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
2
4
6
8
10
Temp (sec)
Cou
ple
(N.m
)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
10
20
30
40
50
Temp (sec)
Hau
teur
(m)

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
62
Figure 12. Hauteur manométrique de la pompe H(t).
Figure 13.Caractéristique Q=f (N)
L’analyse des courbes obtenues montre clairement qu’on ne peut pas atteindre les
valeurs maximales car la vitesse dépend de la tension d’induit qui ne doit pas dépasser sa
valeur nominale de 240V.
III.14.Résultats de simulation de la chaine
Eclairement et température fixe
Figure 14. Schéma bloc de la chaine
0 40 80 120 160 200 2400
5
10
15
20
25
Vitesse (rad /s)
Déb
it (
m 3
/h
)

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
63
Figure 15. Caractéristique H=f (Q) de la pompe.
Figure 16. Vitesse de rotor𝜔 (𝑡)
Figure 17. Caractéristique Q=f (N) de la pompe.
0 5 10 15 200
5
10
15
20
25
30
35
Débit (m3 /h)
Hau
teu
r (m
)
G = 1000 w/m2
T =250 C
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
20
40
60
80
100
120
140
160
180
Temps (sec)
Vit
esse
(ra
d /
s)
G =1000 w / m2
T = 25 0 C
0 20 40 60 80 100 120 140 160 180 200 2200
2
4
6
8
10
12
14
16
18
Vitesse (rad / s)
Déb
it (
m3 /
h)
G =1000 w / m2
T =250 C

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
64
Interprétation
Le système est testé pour un éclairement de référence de 1000W/m2 et une température
ambiante de 250Co. Les courbes obtenues montrent l’évolution de la vitesse, du débit et de la
hauteur. Il est très claire que les valeurs abouties ne sont pas maximales car la vitesse du
moteur entraînant la pompe est limitée à1750tr/min.
Eclairement variable selon un profil
Figure 18. Puissance du GPV P(t).
Figure 19. Vitesse du rotor 𝜔 (𝑡)
0 0.5 1 1.5 2 2.5 3 3.5 40
200
400
600
800
1000
1200
1400
1600
Temps (sec)
Pui
ssan
ce (
W)
G =1000 w / m2
G =800 w / m2
G =400w / m2
G =600 w / m2
0 0.5 1 1.5 2 2.5 3 3.5 40
50
100
150
200
Temps (sec)
Vit
esse
(ra
d /s
)
G= 1000 w / m 2
G= 400 w / m 2
G= 600 w / m 2
G= 800 w / m 2

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
65
Figure 20. Débit de la pompe Q(t)
Figure 21 .Hauteur manométrique de la pompe H(t).
Figure 22. Caractéristique H=f (Q) de la pompe.
0 0.5 1 1.5 2 2.5 3 3.5 40
5
10
15
20
Temps (sec)
Débit
(m
3 /
h)
G= 800 w /m2
G= 400 w /m2
G= 600 w /m2
G= 1000 w /m2
0 0.5 1 1.5 2 2.5 3 3.5 40
5
10
15
20
25
30
35
Temps (sec)
Hau
teu
r (m
)
G =1000 w/m2
G =800 w/m2
G =600 w/m2
G =400 w/m2
0 5 10 15 20 250
5
10
15
20
25
30
35
Débit (m3 /h)
Hau
teur
(m)
G =600 w /m2
G =400 w /m2
G =1000 w /m2
G =800 w /m2

Chapitre III Modélisation et commande de l’ensemble moteur-pompe
66
Figure 23. Caractéristique Q=f (N) de la pompe.
Figure 24. Caractéristique G=f (t) de la pompe
Interprétation
La variation de l’éclairement en fonction du temps influe sur la vitesse du moteur qui
dépend à son tour à la tension optimale et par la suite sur les performances de la pompe
(hauteur et débit).
III.15 CONCLUSION
Dans ce dernier chapitre, nous avons validé par simulation la chaîne de pompage
complète. Ce qui nous a permis de conclure que :
La commande avec l’adaptateur MPPT permet d’optimiser la puissance délivrée par le
générateur photovoltaïque en fonction de l’ensoleillement.
La tension à la sortie du hacheur BOOST est la seule grandeur qui permet la
commande de la vitesse du moteur à courant continu.
En commandant la vitesse, on peut contrôler le débit et la hauteur manométrique totale
du système de pompage.
0 20 40 60 80 100 120 140 160 180 200 2200
5
10
15
20
25
Vitesse (rad /s)
Déb
it (
m 3 /
h)
G = 1000 w / m2
G = 800 w / m2
G = 600 w / m2
G = 400 w / m2
0 0.5 1 1.5 2 2.5 3 3.5 4400
500
600
700
800
900
1000
1100
1200
Temps (sec)
Ecl
aire
men
t (w
/ m
2 )

CONCLUSION GENERALE
CONCLUSION GENERALE

Conclusion générale
Conclusion générale
L’énergie photovoltaïque est une énergie propre, silencieuse, disponible et gratuite.
C’est d’ailleurs ce explique que son utilisation connaît une croissance significative dans le
monde. D’autre part, la demande d’énergie électrique, essentiellement pour les besoins des
zones rurales et les sites isolés, ne cessent d’augmenter, en particulier, les systèmes de
pompage d’eau. Classiquement sur ce type de site, on utilise l’énergie conventionnelle par
groupe électrogène. Mais cette énergie présente plusieurs contraintes, comme le transport du
combustible et les entretiens périodiques pour les moteurs diesels.
Ce travail a été consacré à une étude, soutenue par simulation, d’un système de
pompage d’eau (au fil de soleil) couplé à un générateur photovoltaïque.
Donc par le biais de ce mémoire, on a pu voir et constater à quel degré l’utilisation
de l’énergie solaire dans différentes applications tel que le pompage d’eau est très importante.
De plus, la modélisation et la simulation de différents sous-ensembles du système
composé de : le hacheur, le moteur à courant continu et la pompe branchés sur un générateur
photovoltaïque, dans l'environnement de programmation de MATLAB /SIMULINK, ont été
développées. Les résultats de simulation ont montré que les grandeurs principales d’une
pompe (débit et hauteur) sont en fonction des conditions météorologiques.
Enfin, pour la continuité de ce modeste travail, nous proposons les perspectives suivantes :
L’ajout, dans la chaîne de pompage, d’une batterie de stockage pour pouvoir pomper
l’eau même la nuit ;
L’optimisation du système de pompage photovoltaïque par des d’autres techniques
intelligentes artificielles comme la logique floue, les réseaux de neurones artificiels et
les réseaux neuro -flous.

Références
Bibliographiques

Bibliographie
Références Bibliographiques
[1] M. L. Louazene, « Etude technico-économique d'un système de pompage
photovoltaïque sur le site de Ouargla », Thèse de Magister, Université de Ouargla
2008.
[2] S. Chikha, « Optimisation de la puissance dans les systèmes photovoltaïques ».
Thèse de Magister, Université de LARBI Ben M’HIDI Oum EL BOUAGHI années
2011/2012
[3] A. BORNI, « étude et régulation d’un circuit d’extraction de la puissance maximale
d’un panneau solaire » Thèse de Magister Université de Constantine années 2009.
[4] C. Cédric, « Optimisation énergétique de l’étage d’adaptation électronique dédié à
la conversion photovoltaïque ». Thèse de Doctorat de l’Université de Toulouse
France 2008.
[5] R. Maouedj, « application de l’énergie photovoltaïque au pompage hydraulique sur
les sites de Tlemcen et de Bouzareah ». Thèse de Magister Université de Tlemcen
années 2005/2006.
[6] A. Meflah, « Modélisation d’une chaine de pompage photovoltaïque ». Thèse de
Magister Université de Tlemcen années 2011/2012.
[7] J. Royer, T. Djiako, E. Schiller, B. Sada Sy « Le pompage photovoltaïque »,
Manuel de cours à l’intention des ingénieurs et des techniciens Bibliothèque
nationale du Canada, 1998.
[8] A. Sofiane, « Étude et optimisation d'un générateur photovoltaïque pour la recharge
d'une batterie avec un convertisseur sépic ». L’Université Laval dans le cadre du
programme de maîtrise en génie électrique pour l'obtention du grade de Maître ès
Sciences (M.Se.) années 2011.
[9] B. Wafa, « Modélisation et simulation d’un système photovoltaïque adapté par
une commande MPPT ». Thèse de Magister Université d’Ouargla
[10] S. M. Ait-Cheikh, «Etude, Investigation et conception d’algorithmes de
commande appliqués aux systèmes photovoltaïques», Thèse de Doctorat d’état,
Ecole Nationale Polytechnique, Alger, Algérie, 2007.
[11] S. Issaadi, « Commande d’une poursuite du point de puissance maximum
(MPPT) par les Réseaux de Neurones », Mémoire de magister, Ecole Nationale
Polytechnique, Alger, Algérie, 2006.

Bibliographie
[12] F. Chekired, « Etude et implémentation d'une commande MPPT neuro-floue sur
FPGA», mémoire de magister, Ecole Nationale Polytechnique, Alger, Algérie, 2008.
[13] N. Abouchabana, « Etude d’une nouvelle topologie buck-boost appliquée à un
MPPT », Mémoire de Magistère, Ecole Nationale Polytechnique, Alger, Algérie,
2009.
[14] M. Moulay-Amar et M. Loghouini, « Etude et réalisation d’un système de
poursuite de point de puissance maximale à base de microcontrôleur destiné à une
installation photovoltaïque », Mémoire d’ingéniorat, université de Ouargla, Algérie,
2005.
[15] D. Boukhers, « optimisation d’un système d’énergie photovoltaïque application
au pompage ».Thèse de Magister, Université de Constantine 2007.
[16] B.Equer, «Le Pompage Photovoltaïque Manuel de cours », énergie solaire
photovoltaïque ellipses 1993
[17] J. Royer, T. Djiako, E. Schiller, B. SadaSy, « Le pompage photovoltaïque »,
Manuel decours à l’intention des ingénieurs et des techniciens Bibliothèque
nationale du Canada, 1998.
[18] K. Benlarbi, « Optimisation Floue, Neuronale et Neuro-Floue d’un système de
Pompage Photovoltaïque Entraînées par différents machines électriques », Thèse de
Magister, Université de Batna 2003.
[19] A. Betka, « Optimisation d’un Système de Pompage Photovoltaïque au Fil du
Soleil », Thèse de Magister, Université de Biskra.1997
[20] Techniques de l’ingénieur, « Mécanique et chaleur, pompes, vide, air
comprimé», NB4,

Annexe
Annexe
Module PV SP 75 Température aux conditions standard, T 25° C
Eclairement aux conditions standard, E 1000 W/m2
Tension de circuit ouvert, Vco 21.7 A
Courant de court-circuit, Icc 4.8 A
Puissance maximale, Pm 75 W
Tension au point de la puissance maximale, Vm 17.2 V
Courant au point de la puissance maximale, Im 3.5 A
Moteur à courant Contenu
Tension de l’induit, U 240 V
puissance 5HP
Couple électromagnétique nominale, CN 20.0812 N.m
Vitesse nominale 1750 tr/min
L’inductance de l’induit, La 0.028 H
Résistance de l’induit, Ra 2.581 Ω
Moment d’inertie, J 0.02215 kg.m2
Coefficient de frottement, f 0.002953 N.m.s
Constant, Ke 1.0665
Pompe Centrifuge Vitesse 2900 tr/min
Débit maximal, Qmax 30 m3/h
Relevage maximal, Hr 80 m
Puissance moteur, P 14 kW

Abstract – Over recent years, the use of power electronics applied to photovoltaic
technology has allowed the birth of many products dedicated to motor control applications
such as water pumping systems. These photovoltaic Systems can be an attractive proposal
in desert regions because of their reliability and maintenance-free operations. The main
objective of this system is to ensure operation at maximum power of PV system for various
climatic conditions.
This work presents the study and simulation of a photovoltaic water pumping system using
Simulink and MATLAB; it includes models for a solar photovoltaic (PV) generator, DC/Dc
converter, and DC motor driven centrifugal pump as a load. The matching between the
photovoltaic generator and the load was determined by the DC / DC converter. The MPPT
algorithm, which is based on the perturb and observe (P & O) method, is also described. The
points indicating module voltage Vmp and current Imp at maximum Power Pmax are
obtained. The simulation results showed that the water pumping to a desired height is
imposed by the flow of the pump which is in his turn varies according to the climatic
conditions.
Keywords: PV, photovoltaic energy, MPPT, water pumping, centrifugal pump, electrical
motor
Résumé – La demande croissante d'eau dans les zones rurales et sites isolés a fait qu'un
intérêt grandissant est porté sur l'utilisation des générateurs photovoltaïques comme source
d'énergie aux groupes motopompes. En effet la réalisation de systèmes de pompage
autonomes, fiables et à bon rendement constitue une solution pratique et économique au
problème du manque d'eau dans les régions désertiques.
Ce travail présente l’étude et la simulation d'un système de pompage d'eau photovoltaïque
sous l’environnement MATLAB/Simulink, il comprend des modèles de panneaux solaires
(PV), Convertisseur DC / DC, et groupe motopompe (charge). L’adaptation entre le
générateur photovoltaïque et la charge a été effectuée moyennant le convertisseur DC/DC.
L'algorithme MPPT, qui est basé sur la méthode perturber et observer (P & O), est
également décrite. Les points indiquant la tension optimale Vopt et le courant optimal Iopt à
puissance maximale Pmax sont obtenus.
Les résultats obtenus ont montré que le pompage d’eau à une hauteur voulue est imposé
par le débit de la pompe qui est à son tour variable en fonction des conditions
météorologiques.
Mots clés: PV, énergie photovoltaïque, MPPT, pompage d’eau, pompe centrifuge,
moteur électrique