tutorial 6: mechanism fundermentals zhengjian, xu oct 15, 2008
Post on 21-Dec-2015
221 views
TRANSCRIPT

Tutorial 6:Mechanism Fundermenta
lsZhengjian, XU
Oct 15, 2008

Fundermentals:Design of Mechinary Mobility: Degree of Freedom (DOF),
In 2D mechanism every rigid body has 3 DOF.
Link:
A Rigid body in the mechinary system
Joint (Kinematic Pair)
Connect between different Links, the joints can restrain some DOF of the links.
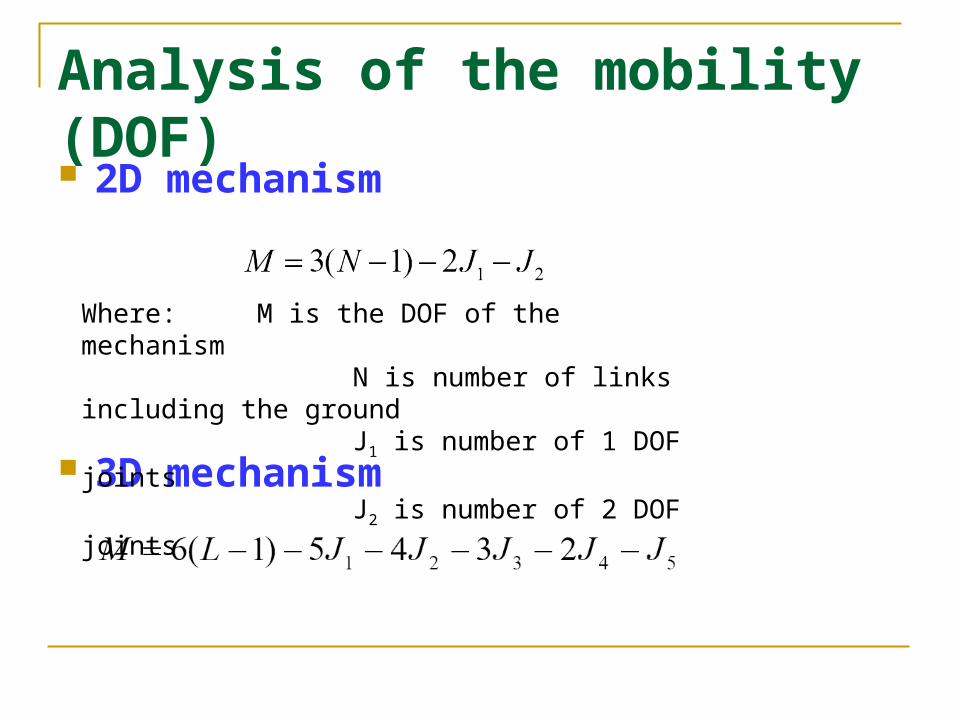
Analysis of the mobility (DOF) 2D mechanism
3D mechanism
Where: M is the DOF of the mechanism N is number of links including the ground J1 is number of 1 DOF joints J2 is number of 2 DOF joints

Examples
(b) N=3 J1=2 J2=1 M= 1
(a) N=6 J1=7 J2=1 M=0
(d) N=7 J1=7 J2= 1 M=3
(c) N=4 J1=4 J2=0 M=1

Classification of four-bar linkage Grashof condition
PQSL Where: L: length of shortest link S: length of longest link P: length of one remaining link Q: the length of another remaining link

Classification of four-bar linkage

Position analysis of 4-bar linkage: graphical method
O2O4
A
2=45°
B1
B2
3
4

Position analysis of 4-bar linkage: graphical method
O2
A
2=45°
B1
B2
3
4


Position analysis for Crank-Rocker mechanism The calculation of out-put angle

Transmission angle


Example Given L1=12 ,L2=4, L3=8, L4=9; (1) Calculate range of output angle (2) Calculate range of the transmission angle

(1) , S=4, L=11, Q=9, P=8; therefore S+L<Q+P
(2) a=4, b=9, c=8, d=11
A
O1
B
O2
A
B
O1 O2
(2.1)
(2.2)
cd
abdc
2
)(cos
222
4
cd
abdc
2
)(cos
222
4
4
4
d
c
a
b
a
bc

Transmission angle
bc
abbctrans 2
)(cos
222
AO1
B
O2
AO1
B
O2
(3.1)
(3.2)
bc
adcbtrans 2
)(cos
222
Two limited status:
trans
trans
a
b
b
a
c
d


Four-Bar slider-crank mechanismThe output range:

Inverted slider-crank mechanism