ultrasonic distance and velocity measure … · ultrasonic distance and velocity measure-ment using...
TRANSCRIPT
ICSV16, Kraków, Poland, 5-9 July 2009 1
ULTRASONIC DISTANCE AND VELOCITY MEASURE-MENT USING A PAIR OF LINEAR-PERIOD-MODULATED SIGNALS CODING BY MAXIMUM LENGTH SEQUENCES FOR AUTONOMOUS MOBILE ROBOTS Shinnosuke Hirata Tokyo Institute of Technology, G2-32, 4259 Nagatsuta-cho, Midori-ku, Yokohama, 226-8502, Japan
Tomoharu Sato Tokyo Institute of Technology, G2-32, 4259 Nagatsuta-cho, Midori-ku, Yokohama, 226-8502, Japan
Minoru Kuribayashi Kurosawa Tokyo Institute of Technology, G2-32, 4259 Nagatsuta-cho, Midori-ku, Yokohama, 226-8502, Japan e-mail: [email protected]
Takashi Katagiri Sutekina Inc., 1134-12, Akaho, Komagane, 399-4117, Japan
Environment recognition using ultrasonic waves in autonomous mobile robots has been stu-died due to advantages of ultrasonic sensors, their low-purchase cost, small size, and simple hardware. Calculation costs of signal processing, crosstalk of ultrasonic waves, and the influ-ence of the Doppler effect are important problems for ultrasonic distance measurement in au-tonomous mobile robots. Identification of an ultrasonic wave is required to avoid crosstalk of ultrasonic waves. Several methods of distance measurement using ultrasonic waves coding by pseudo-random sequence have been proposed. In the case of a moving object, however, the distance to the object cannot be determined by the proposed methods because of the in-fluence of the Doppler effect. In this paper, a low-calculation method of real-time distance and velocity measurement of a moving object using ultrasonic waves coding by maximum length sequences (M-sequences) is proposed. A pair of linear-period-modulated (LPM) sig-nals, which includes two LPM signals coding by M-sequences, is transmitted in the proposed method. The received signal is correlated with the single reference LPM signal. Real-time signal processing of cross correlation by the limited computational ability of autonomous mobile robots is difficult. To reduce the calculation costs of cross correlation, the received signal and the reference signal are converted into single-bit signals by a delta-sigma modula-tor and a digital comparator. Cross correlation of single-bit signals reduce the calculation costs of cross correlation. The distance and the Doppler velocity of the object are determined from the two peaks in the cross-correlation function obtained by single-bit signal processing.

16th International Congress on Sound and Vibration, Kraków, Poland, 5–9 July 2009
2
Furthermore, the number of channels of the proposed ultrasonic sensing system is increased greatly due to dual modulation by LPM and M-sequence.
1. Introduction Environment recognition using ultrasonic waves in autonomous mobile robots has been stud-
ied due to advantages of ultrasonic sensors, their low-purchase cost, small size, and simple hard-ware 1-3. Calculation costs of signal processing, the influence of the Doppler effect, and crosstalk of ultrasonic waves are important problems for ultrasonic distance measurement in autonomous mo-bile robots.
The method of ultrasonic distance measurement is based on the pulse-echo method, which de-termines the time-of-flight (TOF) of ultrasonic waves 4. The TOF is the interval from transmission of an ultrasonic pulse to reception of an echo reflected from an object. The distance of the object is estimated from the product of the TOF and the propagation velocity of an ultrasonic wave. For ef-fective improvement of the distance resolution and the signal-to-noise ratio (SNR) of the reflected echo, pulse compression has been employed in the pulse-echo method 5. A frequency-modulated (FM) signal or a signal coding by pseudo-random sequences is typically transmitted in the pulse-echo method with pulse compression, the cross-correlation method. In the cross-correlation method, a received signal is correlated with a reference signal. The TOF of the reflected echo is estimated from the maximum peak time in the cross-correlation function. A calculation of cross correlation, consists huge iterations of multiplications and accumulations, requires the high-cost digital signal processing. Therefore, real-time distance measurements by the cross-correlation methods are diffi-cult because of the limited computational ability of autonomous mobile robots. To reduce the calcu-lation costs of cross correlation, a sensor signal processing method using a delta-sigma modulated single-bit digital signal has been proposed 6-7. The calculation costs of cross correlation are reduced due to cross correlation by single-bit signal processing.
In the case of a moving object, the reflected echo is modulated due to the Doppler effect caused by the object’s motion. The Doppler effect brings about decrease or increase in the signal period depending on the Doppler velocity of the object. The linear shift of the signal period means the hyperbolic shift of the frequency. Therefore, a Doppler shift LFM signal cannot be correlated with a reference LFM signal. The cross-correlation methods using a linear-period-modulated (LPM) signal has been proposed for ultrasonic distance measurement of a moving object 8. The signal pe-riod of the LPM signal linearly sweeps with time. Therefore, a Doppler-shift LPM signal can be correlated with a reference LPM signal. However, the cross-correlation function of the Doppler-shift LPM signal and the reference LPM signal is also modulated due to the Doppler effect. For accurate ultrasonic distance measurement of a moving object, Doppler-shift compensation and Doppler velocity estimation are thus required. Low-calculation-cost Doppler-shift compensation and high-resolution Doppler velocity estimation with wide measurement range have been proposed 9. A pair of LPM signals, which includes two down-chirp LPM signals, is transmitted in the pro-posed method. The received signal is correlated with the single reference LPM signal using cross correlation by single-bit signal processing. The distance and the Doppler velocity of the object are estimated from the modulated cross-correlation function with the low-calculation cost.
Identification of the pair of LPM signals is required to avoid crosstalk of ultrasonic waves. Several methods of ultrasonic distance measurement using a transmitted signal coding by pseudo-random sequences have been proposed. However, the sufficient number of channel of the transmit-ted signals is not realized. Furthermore, the cross-correlation method using pseudo-random se-quences cannot determine the accurate distances of the moving objects. In this paper, a low-calculation method of real-time distance and velocity measurement of a moving object using ultra-sonic waves coding by maximum length sequences (M-sequences) is proposed. In the proposed

16th International Congress on Sound and Vibration, Kraków, Poland, 5–9 July 2009
3
method, the pair of LPM signals is coded by M-sequences. The number of channel of the pair of modulated LPM signals is increased greatly due to dual modulation by LPM and M-sequences.
2. Cross correlation by single-bit signal processing Cross correlation by single-bit signal processing of the proposed method consists of a recur-
sive cross-correlation operation of single-bit signals and a smoothing operation accomplished by the FIR low-pass filter, as illustrated in Fig. 1. In the proposed method, an LFM signal is transmitted by a loudspeaker. The received signal of a microphone is converted into a single-bit received signal x1(t) by a delta-sigma modulator. The transmitted LFM signal is converted into a single-bit refer-ence signal h1(i) of N samples by a digital comparator. The cross-correlation function C1(t) of the received signal x1(t) and the reference signal h1(i) is expressed as
. (1) ( ) ( ) ( )itxiNhtCN
i−⋅−= ∑
−
=1
1
011
The calculation of the cross-correlation operation of Eq. (1) requires huge numbers N of multiplica-tions and accumulations of single-bit samples.
The difference of the cross-correlation function, C1(t )-C1(t-1), is expressed as
. ( ) ( ) ( ) ( ) ( ) ( 11 1
1
011
1
0111 −−⋅−−−⋅−=−− ∑∑
−
=
−
=
itxiNhitxiNhtCtCN
i
N
i
)
} ( ) . (2) ( ) ( ) ( ) ( ) ( ) ( ){ itxiNhiNhNtxhtxNhN
i
−⋅+−−−+−⋅−⋅= ∑−
=1
1
0111111 11
The values of h1(1) and h1(N) are 1 and -1, respectively, because h1(i) is the LFM signal converted into the single-bit signal. Furthermore, h1(i) has several hundred zero-cross points Zi. There are the same values, 1 or -1, between two zero-cross points Zi in h1(i) Therefore, the values of h1(N-i)-h1(N-i+1) are expressed as
(3) ( ) ( )⎪⎩
⎪⎨
⎧
≠−=−−=−
=+−−−−
,ZiN,ZiN,ZiN
iNhiNh
i
m
m
L
L
L
02
21 2
12
11
Digital comparator
Delta-sigma modulator
Loudspeaker
Reflected echoMicrophone
Object
d0
LFM signal
Ultrasonicpulse d
Summation of1-bit samples
Σ
Received signal
Reference signal
-1 1-1 -1 -1 111 -1 -1 -1 -1 11
-1 11 -1 1 -11-1 -1 1 -1 -1 -11 -1
Recursive cross-correlation operation
-12
-2
-1
z-1
++
c1(t)
FIR Low-pass filter
Smoothing operationcS(t)
Figure 1. Design of cross-correlation by single-bit signal processing,
consisting of a recursive cross-correlation operation and a smoothing operation.
16th International Congress on Sound and Vibration, Kraków, Poland, 5–9 July 2009
4
where m is a natural number. The calculation of the recursive cross-correlation operation, which is performed by integrating the difference of the cross-correlation function, is expressed as
( ) ( ) ( ) ( ) ( ) (txZNtxZNtxNtxtCtC 12111111 221 −+ )+−⋅−+−⋅+−−−= L . (4)
The calculation cost of the recursive cross-correlation operation is integration and summations of single-bit samples. The number of summations Zi+2 only depends on the number of zero-cross points in the transmitted LFM signal. Therefore, the calculation costs are constant and independent of the sampling frequency of digital signal processing. The recursive cross-correlation operation of single-bit signals thus reduces the calculation costs of cross correlation.
The single-bit received signal x1(t) contains a large quantity of quantized noise in a high-frequency band because x1(t) is a delta-sigma modulated single-bit signal. The high-frequency noise decreases the SNR of the cross-correlation function C1(t). To improve the SNR of C1(t), the smoothing operation by the moving average filter is required to cancel the high-frequency noise in C1(t). The cross-correlation function Cs(t) smoothed by the moving average filter is expressed as
. (5) ( ) ( )∑−
=
−=1
01
M
iS itCtC
where M is the length of the moving average filter.
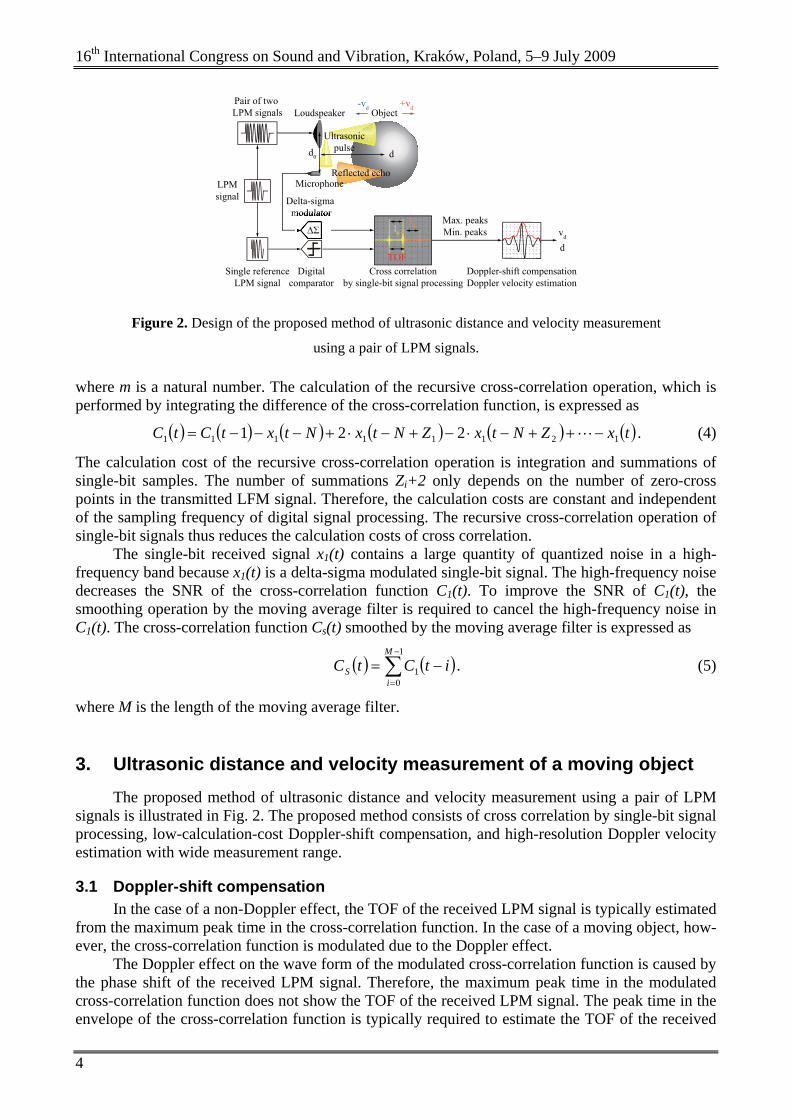
3. Ultrasonic distance and velocity measurement of a moving object The proposed method of ultrasonic distance and velocity measurement using a pair of LPM
signals is illustrated in Fig. 2. The proposed method consists of cross correlation by single-bit signal processing, low-calculation-cost Doppler-shift compensation, and high-resolution Doppler velocity estimation with wide measurement range.
3.1 Doppler-shift compensation In the case of a non-Doppler effect, the TOF of the received LPM signal is typically estimated
from the maximum peak time in the cross-correlation function. In the case of a moving object, how-ever, the cross-correlation function is modulated due to the Doppler effect.
The Doppler effect on the wave form of the modulated cross-correlation function is caused by the phase shift of the received LPM signal. Therefore, the maximum peak time in the modulated cross-correlation function does not show the TOF of the received LPM signal. The peak time in the envelope of the cross-correlation function is typically required to estimate the TOF of the received
Loudspeaker
Reflected echoMicrophone
Object
d0
Ultrasonicpulse d
Digitalcomparator
Delta-sigma modulator
Single referenceLPM signal
Pair of two LPM signals
LPMsignal
+vd-vd
Cross correlationby single-bit signal processing
Max. peaksMin. peaks
Doppler-shift compensationDoppler velocity estimation
l0
ldvd
TOFd
Figure 2. Design of the proposed method of ultrasonic distance and velocity measurement
using a pair of LPM signals.

16th International Congress on Sound and Vibration, Kraków, Poland, 5–9 July 2009
5
LPM signal. In the proposed method, the peak time tp in the envelope of the cross-correlation func-tion can be estimated from the maximum peak time tmax, the minimum peak time tmin, and their ab-solute amplitudes |pmax| and |pmin| in the modulated cross-correlation function. The peak time tp in the envelope of the cross-correlation function can be expressed as, if |pmax| > |pmin|,
( ) ( )
⎩⎨⎧
−
+−−⋅==
max
minmax
min
max
r..p/p.
rr
150148251150
, (6)
and if |pmax| < |pmin|,
( ) ( )⎩⎨⎧
+−−⋅
−
==
501482511501
..p/p.r
rr
maxmin
min
min
max , (7)
minminmaxmaxp trtrt ⋅+⋅= , (8)
where rmax is the coefficient value of tmax, and rmin is the coefficient value of tmin. The peak time tp in the envelope of the cross-correlation function is shifted from the TOF of
the received LPM signal. The Doppler effect on the peak time in the envelope of the modulated cross-correlation function is caused by the sweep period shift of the received LPM signal. The Dop-pler-shift time td of the peak time tp can be expressed as
00
000 l
pp
vvv
lp
ppt
bd
d
b
dd ⋅⋅
+=⋅
−= , (9)
where p0 is the starting period of the reference LPM signal, p0d is the starting period of the Doppler-shift LPM signal, and pb is the sweep period band of the reference LPM signal. Meanwhile, vd is the Doppler velocity of the object, v is the propagation velocity of an ultrasonic wave in air, and l0 is the length of the reference LPM signal. The TOF of the received LPM signal can be estimated by subtraction of the Doppler-shift time td estimated in Eq. (9) from the peak time tp estimated in Eq. (8). The proposed Doppler-shift compensation can thus determine the distance of the moving object with low-calculation-cost by numerical calculation alone.
3.2 Doppler velocity estimation Doppler velocity estimation of a moving object is required for the proposed Doppler-shift
compensation. The pulsed Doppler method is one of the typical methods of Doppler velocity esti-mation. In the pulsed Doppler method, the Doppler velocity is estimated from the Doppler-shift frequency, which is given by the Fourier transform of the echo reflected from the moving object. Velocity resolution by the Fourier transform is not sufficient for the proposed Doppler-shift com-pensation, however, because of the short length of the ultrasonic pulse. Furthermore, measurement range of Doppler velocity estimation from the phase of the peaks in the cross-correlation function is limited because the measurement �range of the phase is 180 ゚.
The length of the received LPM signal is linearly decreased or increased due to the Doppler effect. When a pair of LPM signals is transmitted, the cross-correlation function of the pair of LPM signals and the single reference LPM signal has two peaks. The interval of the first peak and the second peak of the cross-correlation function shows the length of the single LPM signal. The cross-correlation function of the pair of Doppler-shift LPM signals and the single reference LPM signal also has two peaks. The interval of the first maximum peak and the second maximum peak in the modulated cross-correlation function shows the Doppler-shift length of the single LPM signal. The Doppler-shift length of the single LPM signal is expressed as
16th International Congress on Sound and Vibration, Kraków, Poland, 5–9 July 2009
6
0lvvv
ld
dd ⋅
+= , (10)
where ld is the Doppler-shift length of the single LPM signal, l0 is the length of the single LPM sig-nal, vd is the Doppler velocity, and v is the propagation velocity of an ultrasonic wave in air. Time resolution of the Doppler-shift length of the single LPM signal estimated from the cross-correlation function obtained by single-bit signal processing is improved by high-sampling-frequency signal processing. Therefore, the Doppler velocity can be estimated with sufficient velocity resolution. In case the length of the single LPM signal is 3.274 ms and sampling frequency is 50 MHz, resolution of the Doppler velocity is approximately 0.0085 m/s with wide measurement range.
4. Identification of the transmitted signal For identification of the transmitted signal, a pair of LPM signals is modulated by an M-
sequence. The number of channel of the pair of modulated LPM signals is increased greatly due to dual modulation by LPM and M-sequence modulation.
4.1 M-sequence modulation An M-sequence is a type of pseudo-random binary sequences. M-sequences are generated by
linear-feedback shift registers. An n-length linear-feedback shift register generates 2n-1 bit periodic sequences. Therefore, an n-order M-sequence is a 2n-1 bit binary sequence. M-sequences have been employed in modern communication systems, including spread spectrum Code Division Multiple Access (CDMA) because M-sequences have high autocorrelation and minimum cross correlation.
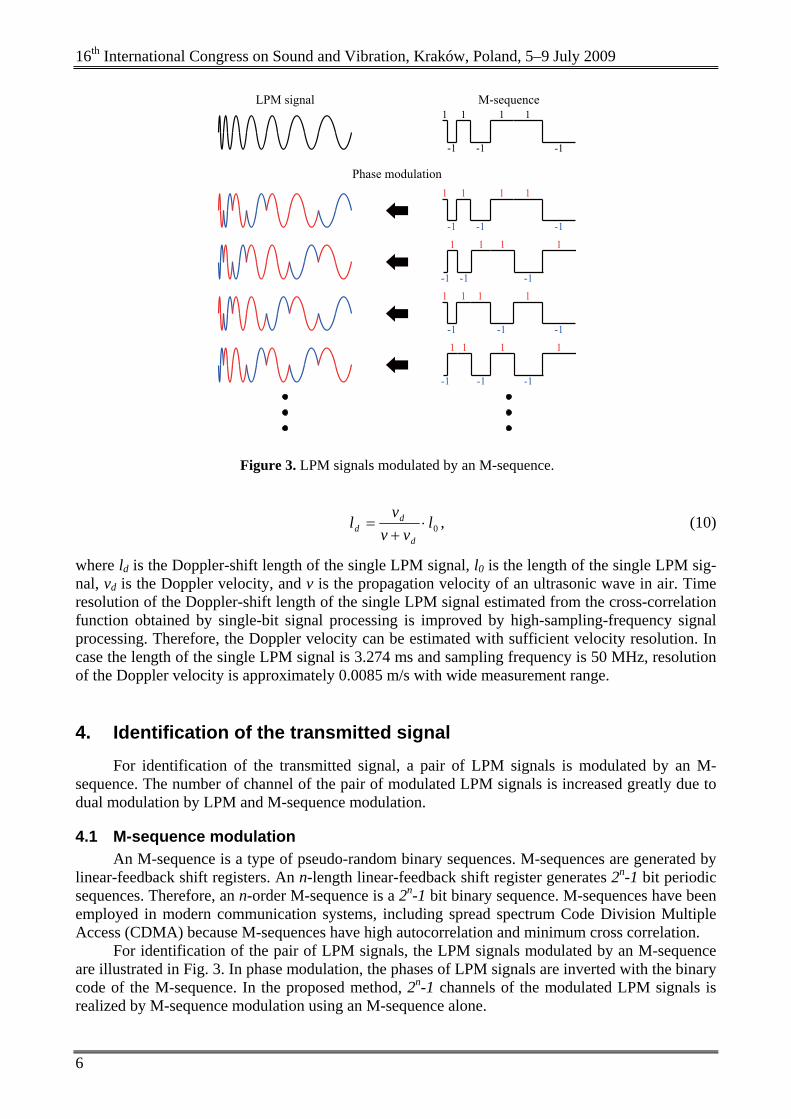
For identification of the pair of LPM signals, the LPM signals modulated by an M-sequence are illustrated in Fig. 3. In phase modulation, the phases of LPM signals are inverted with the binary code of the M-sequence. In the proposed method, 2n-1 channels of the modulated LPM signals is realized by M-sequence modulation using an M-sequence alone.
Phase modulation
LPM signal
1 1 1 1
-1 -1 -1
1 1 1 1
-1 -1 -1
M-sequence
11 1 1
-1 -1 -1
1 1 1 1
-1 -1 -1
11 1 1
-1 -1 -1
Figure 3. LPM signals modulated by an M-sequence.

16th International Congress on Sound and Vibration, Kraków, Poland, 5–9 July 2009
7
4.2 Cross-correlation function of the identified signals Identification of the LPM signal was evaluated by computer simulations using MATLAB.
The period of the transmitted LPM signal linearly swept from 20 µs to 50 µs. The length of the LPM signal was 6.188 ms. Therefore, wave number of the LPM signal was 189.The sampling fre-quency was 50 MHz. The LPM signal was modulated by a 6th order M-sequence. The M-sequence is 63-bit binary sequence. Therefore, the phases of the 3 wave number LPM signal are inverted with the 1-bit binary code.
The autocorrelation function of the transmitted LPM signal is illustrated in Fig. 4 (a), (d). The autocorrelation function of the modulated LPM signal is illustrated in Fig. 4 (b), (e). The cross-correlation function of the modulated LPM signals is illustrated in Fig. 4 (c), (f). The autocorrela-tion function of the modulated LPM signal similarly has high autocorrelation to the transmitted LPM signal. Furthermore, the cross-correlation function of the modulated LPM signals has not peaks. Therefore, the modulated LPM signal is identified due to dual modulation of LPM and the 6th order M-sequence.
5. Conclusion Ultrasonic distance and velocity measurement, which consists of cross correlation by single-
bit signal processing, low-calculation-cost Doppler-shift compensation, and high-resolution Doppler
-6 -4 -2 0 2 4 6-1
0
1
Time [ms](a)
Aut
ocor
rela
tion
func
tion
-6 -4 -2 0 2 4 6-1
0
1
Time [ms](b)
Aut
ocor
rela
tion
func
tion
-6 -4 -2 0 2 4 6-1
0
1
Time [ms](c)
Aut
ocor
rela
tion
func
tion
-0.5 0 0.5-1
0
1
Time [ms](d)
Aut
ocor
rela
tion
func
tion
-0.5 0 0.5-1
0
1
Time [ms](e)
Aut
ocor
rela
tion
func
tion
-0.5 0 0.5-1
0
1
Time [ms](f)
Aut
ocor
rela
tion
func
tion
Figure 4. The autocorrelation functions and cross-correlation functions. (a), (d): the autocorrelation function of the transmitted LPM signal. (b), (e): the autocorrelation function of the modulated LPM sig-
nal. (c), (f): the cross-correlation function of the modulated LPM signals.

16th International Congress on Sound and Vibration, Kraków, Poland, 5–9 July 2009
8
velocity estimation with wide measurement range, have been proposed. In this paper, ultrasonic distance and velocity measurement using the pair of LPM signals coding by M-sequences is pro-posed. In the proposed method, the pair of modulated LPM signals can be identified by phase modulation with the binary code of the M-sequence. The huge numbers of channel of the transmit-ted signals is realized due to dual modulation by LPM and M-sequences.
REFERENCES 1 Y. Nagashima, S. Yuta, Ultrasonic sensing for a mobile robot to recognize an environment -
Measuring the normal direction of walls-, Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, Raleigh, NC, U.S.A., vol. 2, July, 1992, 805-812.
2 K. W. Jorg, M. Berg, Sophisticated mobile robot sonar sensing with pseudo-random codes, Robotics and Autonomous Systems, vol. 25, no. 3, Nov., 1998, 241-251.
3 J. Klahold, J. Rautenberg, and U. Ruckert, Continuous Sonar Sensing for Mobile Mini-Robots, Proceedings of the 2002 IEEE International Conference on Robotics and Automation, Wash-ington, DC, U.S.A., vol. 1, May, 2002, 323-328.
4 D. Marioli, E. Sardini, and A. Taroni, Ultrasonic distance measurement for linear and angular position control, IEEE Trans. Instrumentation and Measurement, vol. 37, no. 4, Dec., 1988, 578-581.
5 D. Marioli, C. Narduzzi, C. Offelli, D. Petri, E. Sardini, and A. Taroni, Digital Time-of-Flight Measurement for Ultrasonic Sensors, IEEE Trans. Instrumentation and Measurement, vol. 41, no. 1, Feb., 1992, 93-97.
6 S. R. Norsworthy, R. Schreier, and G. C. Temes, Delta-Sigma Data Converters Theory, De-sign, and Simulation, IEEE Press, Piscataway, 1997
7 S. Hirata, M. K. Kurosawa, T. Katagiri, Cross-correlation by Single-bit Signal Processing for Ultrasonic Distance Measurement, IEICE Trans. Fundamentals, vol. E91-A, no. 4, Apr., 2008, 1031-1037.
8 J. J. Kroszczynski, Pulse compression by means of linear-period modulation, Proceedings of the IEEE, vol. 57, no. 7, July, 1969, 1260-1266.
9 Shinnosuke Hirata, Minoru K. Kurosawa and Takashi Katagiri, Ultrasonic distance and veloc-ity measurement by low-calculation-cost Doppler-shift compensation and high-resolution Doppler velocity estimation with wide measurement range, Acoustical Science and Technol-ogy, vol. 30, no. 3, May, 2009.