uma introdução às noções de imersão, submersão e lema de morse
DESCRIPTION
Trabalho de conclusão do curso de Especialização em Matemática. Trata sobre os principais tópicos de análise no R^nTRANSCRIPT

UNIVERSIDADE FEDERAL DE GOIÁS
INSTITUTO DE MATEMÁTICA E ESTATÍSTICA
Uma Introdução às Noções de Imersão,Submersão e Lema de Morse.
ROSANE GOMES PEREIRA
Orientador: Prof.Dr. Maurílio Márcio Melo
Especialização em Matemática
Goiânia2010

ROSANE GOMES PEREIRA
Uma Introdução às Noções de Imersão,Submersão e Lema de Morse.
Monografia apresentada ao Programa de Pós–Graduaçãodo Instituto de Matemática e Estatística da UniversidadeFederal de Goiás, como requisito parcial para obtenção doCertificado de Especialização em Matemática.
Área de concentração: Análise.
Orientador: Prof. Dr. Maurílio Márcio Melo
Goiânia2010

Aos meus pais pela perseverança e paciência, ao meu irmão pelas críticas e aminha irmã pela ajuda sempre contínua.

Agradecimentos
Em primeiro lugar, gostaria de agradecer a Jeová Deus por ter me dado forçaspara continuar esse trabalho. Em segundo lugar, gostaria de agradecer aos meus pais, quesempre confiaram em mim e aos meus irmãos, que sempre me incentivaram. Não poderiaesquecer, neste momento, de fazer um agradecimento especial ao Professor Maurílio quesempre soube dizer as palavras certas nas horas mais necessárias. Gostaria de agradecertambém aos professores Maurício Donizetti e José Hilário da Cruz, os quais participaramda banca e contribuíram de forma significativa na conclusão do trabalho.
Indubitavelmente, devoto os mais sinceros agradecimentos aos meus colegas deespecialização, pessoas formidáveis a quem tive o privilégio de conhecer e conviver, epelas quais tenho uma grande admiração.

Na medida em que as leis da matemática se referem à realidade, elas nãosão certas; e na medida em que são certas elas não se referem à realidade.
Einstein

Resumo
O presente trabalho tem como objetivo apresentar uma breve introdução às noções deImersão, Submersão e o Lema de Morse. Este, é um resultado fundamental pois, é atravésdele que podemos analisar a natureza de um ponto crítico não degenerado. Quandofalamos em natureza de um ponto crítico significa que estamos interessados em descobrirquando este ponto é um ponto de sela, quando é um ponto de máximo ou quando é pontode mínimo. No entanto, a recíproca do Lema de Morse não é verdadeira. Por fim, em cadauma das noções apresentadas há a preocupação de trabalhar exemplos e resultados quesejam interessantes e que facilitem nosso estudo.
Palavras–chave
Imersão, Submersão, pontos críticos não degenerados, Lema de Morse.

Sumário
1 Noções Topológicas do Espaço Euclidiano 91.1 O espaço vetorial Rn 91.2 Produto Interno e Norma 101.3 Norma p 161.4 Normas Equivalentes 181.5 Produto Vetorial 201.6 A Norma de uma Transformação Linear 23
2 Aplicações Diferenciáveis 262.1 Diferenciabilidade 262.2 Derivadas Parciais 292.3 Derivada Direcional 322.4 Fórmula de Taylor 332.5 Hessiana 352.6 Funções Inversa e Implícita 37
3 Imersões e Submersões 413.1 Imersão 413.2 Submersão 463.3 Lema de Morse 48
Referências Bibliográficas 59

Introdução
Durante a primeira metade do século passado a Matemática se desenvolveu deforma impressionante, novas disciplinas foram difundidas, enquanto o conhecimento deáreas clássicas tornou-se mais profundo.
O estudo do espaçoRn faz parte deste desenvolvimento da matemática e é o temacentral do nosso trabalho. Antes de iniciarmos faremos algumas considerações acerca daorganização deste e dos pré-requisitos necessários a sua leitura.
No primeiro capítulo, caracterizamos o espaço vetorial Rn e sua topologia.Topologia é a parte da matemática que se ocupa das propriedades locais de um espaço,bem como das funções contínuas de um espaço topológico em outro. Espaços topológicossão conjuntos onde é possível falar em "proximidade "de pontos. Apesar de parecer diretoassumiremos aqui, que Rn é um espaço vetorial e que as noções de conjuntos abertos,fechados e compactos já são, previamente conhecidas. Um pré-requisito para a leitura éuma breve revisão em Álgebra Linear, a qual [3] pode auxiliar. Nesta referência bibli-ográfica também podemos encontrar a definição de espaço vetorial. A diferenciabilidadee a continuidade são conceitos associados a uma norma, esta é trabalhada de forma longae proveitosa. Longa pois ocupa um espaço considerável na primeira parte do trabalho eproveitosa, pois nos auxilia, frequentemente, nas demais partes.
No segundo capítulo, analisamos as aplicações diferenciáveis no espaço vetorialRn. Aqui, utilizamos conceitos de Álgebra Linear para definirmos a matriz jacobiana.No Teorema de Schwarz que aparece na seção 2.2 não fazemos sua demonstração a qualpode ser encontrada em [4] mas utilizamos um contra-exemplo para estudar suas impli-cações. Aliás, exemplos e contra-exemplos aparecem frequentemente neste capítulo paraque possamos atestar a veracidade de muitas afirmações. Neste momento, gostaríamos defazer algumas ressalvas. Quando dizemos que uma aplicação é continuamente diferenciá-vel significa que todas as suas derivadas parciais existem e são contínuas. Por outro lado,quando dizemos que uma aplicação é de ordem C k significa que todas as suas derivadasparciais até a ordem k existem e são contínuas. Sendo que o primeiro conceito é maisamplo que o segundo. Muitas das proposições apresentadas neste capítulo aparecem em[7] o qual foi necessário para a organização do trabalho.
No terceiro capítulo, na parte referente a imersões analisamos bons exemplos e

8
boas conjecturas que podem, também, ser conferidas em [8].Encerramos este trabalho com o Lema de Morse o qual para o entendimento
de sua demonstração são necessários vários conceitos de Álgebra Linear que podem serencontrados em [3]. Outro pré-requisito para o entendimento do Lema é o conceito dematriz Hessiana e de pontos não degenerados. O prosseguimento desses estudos faz parteda Teoria das Singularidades a qual esperamos que faça parte de um futuro trabalho. Porenquanto, ficamos com algumas consequências bem interessantes do Lema de Morse.

CAPÍTULO 1Noções Topológicas do Espaço Euclidiano
A noção de espaço vetorial é um dos conceitos mais básicos da matemática.Quando introduzimos uma estrutura linear num conjunto estamos interessados, principal-mente, em definir aplicações lineares no espaço. É necessário também, introduzir umaestrutura topológica para que possamos estudar outros conceitos, tais como: continuidadee diferenciabilidade.
Neste capítulo apresentaremos aspectos gerais da Topologia do Espaço Euclidi-ano. Esta noção será necessária no restante do trabalho. As definições de produto internoe norma são feitas no espaço vetorial Rn sobre o corpo de escalares R. Usaremos x,y,zou u,v,w para denotar vetores em Rn.
1.1 O espaço vetorial Rn
Sejam x = (x1,x2, · · · ,xn) e y = (y1,y2, · · · ,yn) em Rn, define-se a soma e oproduto por escalar da seguinte forma:
(S) x+y = (x1 + y1,x2 + y2, · · · ,xn + yn)
(P) αx = (αx1,αx2, · · · ,αxn); α ∈ R; xi, yi ∈ R, i = 1, · · · ,n
Com estas operações o espaço Rn é um espaço vetorial sobre R. O conjuntoB = {e1,e2, · · · ,en} onde ei = (0, · · · ,0,1,0, · · · ,0), com 1 na i-ésima coordenada, é umabase de Rn; chamada de base canônica.
Denotemos por LR(Rm;Rn), o conjunto das transformações lineares de Rm emRn. Afirmamos que existe uma bijeção linear de LR(Rm;Rn) em Mnxm(R), o conjuntodas matrizes de ordem n x m com entradas reais. Com efeito, sejam T ∈ LR(Rm;Rn) eB = {e1,e2, · · · ,en}, B ′ =
{e′1,e
′2, · · · ,e′m
}bases sobre R em Rn e Rm, respectivamente.
Se z ∈ Rm entãoz = z1 · e′1 + z2 · e′2 + · · ·+ zm · e′m. (1-1)

1.2 Produto Interno e Norma 10
Ou seja, [z]B ′ =
z1
z2...
zm
.
Aplicando T em (1-1), temos Tz = z1 ·Te′1 + z2 ·Te′2 + · · ·+ zm ·Te′m =m
∑j=1
z jTe′j.
Entretanto, Te′j =n
∑i=1
ai jei, ai j ∈ R. Logo,
Tz =n
∑i=1
m
∑j=1
(ai jz j
)ei ⇒ [Tz]B =
[(ai j
)]
z1
z2...
zm
=[(
ai j)]
[z]B ′ .
Fazendo [T ]BB ′ =(ai j
), i = 1, · · · ,n e j = 1, · · · ,m, temos que: [Tz]B = [T ]BB ′ [z]B ′ ,
onde [T ]BB ′ é a matriz da transformação linear T e [T ]BB ′ ∈ Mnxm(R). Assim, toda trans-formação linear em LR(Rm;Rn) determina uma matriz de ordem n x m em Mnxm(R).A recíproca, também, é verdadeira; ou seja, toda matriz A em Mnxm(R) determina umatransformação em LR(Rm;Rn), realmente Tz = Az.
1.2 Produto Interno e Norma
Como foi dito no início do capítulo estamos interessados em estudar a noção decontinuidade no espaço vetorial Rn, para isso é preciso introduzir o conceito de norma.No entanto, uma maneira de introduzir uma norma em um espaço vetorial consiste emdefinir neste espaço um produto interno, e é isso que faremos nesta seção.
Definição 1.1 Uma aplicação
< ·, ·> : Rn×Rn −→ F
(u,v) 7−→ < u,v >
satisfazendo, para u, v, w ∈ Rn e α ∈ F, as condições:
1) < u + v,w >=< u,w > + < v,w >
2) < αu,v > = α < u,v >
3) < u,v >= < v,u >
4) < u,u >> 0, u 6= 0, ∀u ∈ Rn e < u,u >= 0⇐⇒ u = 0.
é chamada um produto interno em Rn.

1.2 Produto Interno e Norma 11
Na definição F é um corpo de escalares qualquer, no caso em que F = Ro produto interno usual ou canônico é definido por < x,y > = x1y1 + · · ·+ xnyn.Observemos que este produto é comutativo, isto é < x,y >= < y,x >.
Definimos em Rn a seguinte aplicação:
| · | : Rn −→ Ru 7−→ | u |
onde | u |=< u,u >12 . Observemos que | · | goza das seguintes propriedades:
1) | u+v |≤| u |+ | v |;
2) | αu | = |α| | u |;
3)u 6= 0 ⇒ | u |> 0| u |= 0 ⇔ u = 0
onde u , v ∈ Rn e α ∈ R.
Definição 1.2 Uma aplicação | · | :Rn −→R, satisfazendo as condições 1), 2) e 3) é uma
norma.
No caso em que o produto interno é o usual, a aplicação | x | =√
< x,x > defineuma norma, esta é conhecida como norma euclidiana. Para verificar isto, demonstraremosa desigualdade de Cauchy-Schwarz. Antes, um exemplo é necessário.
Dados x, y, ∈ Rn dizemos que x e y são ortogonais quando < x,y > = 0.
Exemplo 1.3 Sejam x,y ∈ Rn, y 6= 0 e α =< x,y >
| y |2 ·O vetor z = x−αy é ortogonal a y, realmente
< z,y >=< x−αy,y >=< x,y >−α < y,y >=< x,y >−< x,y >
| y |2· | y |2 = 0·
A figura 1.1 ilustra esta situação.

1.2 Produto Interno e Norma 12
Figura 1.1: Ortogonalidade
Teorema 1.4 (Desigualdade de Cauchy-Schwarz) Para quaisquer x, y ∈ Rn, tem-se
|< x,y >|≤| x || y |. Vale a igualdade se, e somente se, y = kx; k ∈ R
Demonstração. No caso em que y = 0, a igualdade é imediata.
Quando y 6= 0, tomemos α =< x,y >
| y |2 e como visto no exemplo 1.3, se z = x−αy,
então < z,y >= 0.Segue então que
| x |2=< x,x >=< z + αy,z + αy >=| z |2 +α2 | y |2 ≥ α2 | y |2 =|< x,y >|2| y |2
⇒ |< x,y >| ≤ | x || y |·Note que a igualdade acontece quando z = 0, ou seja, quando x = αy; α ∈ R· ¤
A propriedade 1) da definição 1.2 decorre, imediatamente, da desigualdadede Cauchy-Schwarz. Com efeito,| x + y |2=< x + y,x + y >=< x,x > +2 < x,y > + < y,y > ≤ | x |2 +2|< x,y >|+| y |2 ≤ | x |2 +2 | x || y |+ | y |2= (| x |+ | y |)2 ⇒ | x+y | ≤ | x |+ | y |.
As propriedades 2) e 3) da definição 1.2 são imediatas. Logo, a aplicação| x |=√
< x,x > é uma norma em Rn.A seguir exibiremos outras normas em Rn. Sejam
| x |M = max{| x1 |, | x2 |, · · · , | xn |}
| x |S = | x1 |+ | x2 |+ · · ·+ | xn |
Mostraremos que | x |S goza das propriedades descritas na definição 1.2. Para istoConsideremos x = (x1,x2, · · · ,xn) e y = (y1,y2, · · · ,yn).

1.2 Produto Interno e Norma 13
Temos
1) | x+y |S = | x1 + y1 |+ | x2 + y2 |+ · · ·+ | xn + yn | ≤ | x1 |+ | y1 |+ | x2 |+ | y2 |+· · ·+ | xn |+ | yn | = | x |S + | y |S ⇒ | x+y |S ≤ | x |S + | y |S.
2) | αx |S = | αx1 |+ | αx2 |+ · · ·+ | αxn | = | α || x1 |+ | α || x2 |+ · · ·+ | α || xn | =| α |(| x1 |+ | x2 |+ · · ·+ | xn |) = | α || x |S ⇒ | αx |S = | α || x |S.
3) x 6= 0⇒ | x |S = | x1 |+ | x2 |+ · · ·+ | xn |> 0⇒ | x |S > 0| x |S = 0⇐⇒ x1 = x2 = · · ·= xn = 0, ou seja x = 0·
É imediato verificar também que | x |M goza das propriedades descritas nadefinição 1.2. Portanto | x |S e | x |M são normas em Rn. A aplicação | x |S é conhecidacomo Norma da Soma e | x |M como Norma do Máximo.
A seguir demonstraremos uma desigualdade envolvendo as normas anteriores.
Afirmação 1.5
| x |M ≤ | x | ≤ | x |S ≤ n · | x |M , ∀x ∈ Rn.
Demonstração.
• | x |M ≤ | x |, realmente| x |2 = | x1 |2 + | x2 |2 + · · · + | xn |2 ≥ max{| x1 |2, | x2 |2, · · · , | xn |2} =(max{| x1 |, | x2 |, · · · , | xn |})2 = | x |M2 ⇒ | x |M ≤ | x |·
• | x | ≤ | x |S, de fato| x |2 = | x1 |2 + | x2 |2 + · · ·+ | xn |2 ≤ | x1 |2 + | x2 |2 + · · ·+ | xn |2 +2| x1 || x2 |+2| x1 || x3 |+ · · ·+ 2| x1 || xn |+ 2| x2 || x3 |+ · · ·+ 2| x2 || xn |+ 2| x3 || x4 |+ · · ·+2| x3 || xn |+ · · ·+2| xn−1 || xn |= (| x1 | + | x2 | + · · ·+ | xn |)2 = | x |S2
⇒ | x | ≤ | x |S.
• | x |S ≤ n · | x |M, com efeito| x |S = | x1 | + | x2 | + · · · + | xn | ≤ max{| x1 |, · · · , | xn |} +max{| x1 |, · · · , | xn |} + · · · + max{| x1 |, · · · , | xn |} = n ·max{| x1 |, · · · , | xn |} =n · | x |M ⇒ | x |S ≤ n · | x |M.
¤

1.2 Produto Interno e Norma 14
Apesar de existirem diferentes normas em Rn, nem todas são provenientes deproduto interno. Isto é, nem sempre existe um produto interno em Rn tal que || x ||2 =< x,x >, ∀x ∈ Rn·
A seguir exibiremos uma condição necessária e suficiente para que uma normaprovenha de um produto interno.
Teorema 1.6 Para que uma norma || · || provenha de um produto interno é necessário e
suficiente que, para quaisquer elementos x , y ∈ Rn se cumpra a igualdade
|| x+ y ||2 + || x− y ||2 = 2(|| x ||2 + || y ||2) (1-2)
Demonstração. Com efeito, suponhamos que || · || provém de um produto interno < ·, ·>.Temos|| x+y ||2 + || x−y ||2 = < x+y,x+y > + < x−y,x−y > = 2 < x,x > +2 < y,y >
= 2(|| x ||2 + || y ||2).Demonstremos que a condição é suficiente. Para isto definimos
< x,y >=14(|| x+y ||2−|| x−y ||2). (1-3)
Mostremos que se vale (1-2), então a aplicação < ·, · > cumpre as propriedades dadefinição 1.1.É imediato que < x,y >=< y,x >. Ainda, < x,x >= || x ||2 > 0, ∀x 6= 0. Para provarmosa propriedade 1) da definição 1.1 consideremos a função de três vetores
Φ(x,y,z) = 4 [< x+y,z >−< x,z >−< y,z >] .
Segue da identidade (1-3) que
Φ(x,y,z) = || x+y+ z ||2−|| x+y− z ||2−|| x+ z ||2 + || x− z ||2 (1-4)
−|| y+ z ||2 + || y− z ||2.
Pela identidade (1-2) temos a expressão
|| x+y+ z ||2 = 2|| x+ z ||2 +2|| y ||2−|| x+ z−y ||2;
|| x+y− z ||2 = 2|| x− z ||2 +2|| y ||2−|| x− z−y ||2.

1.2 Produto Interno e Norma 15
Substituindo (1-4) temos a igualdade
Φ(x,y,z) = || x+ z ||2−|| x− z ||2−|| x+ z−y ||2 (1-5)
+ || x− z−y ||2−|| y+ z ||2 + || y− z ||2.
Somando (1-4) e (1-5) temos a identidade
Φ(x,y,z) =12(|| x+y+ z ||2 + || x− (y+ z) ||2)− 1
2|| x+y− z ||2
−12|| x− (y− z) ||2−|| y+ z ||2 + || y− z ||2.
Aplicando identidade (1-2), obtemos a igualdade
Φ(x,y,z) = 0.
Para mostrar que se cumpre a propriedade 2) da definição 1.1, consideremos a função
ϕ(c) =< cx,y >−c < x,y > , ∀x,y ∈ Rn.
Pela identidade (1-3) segue que
ϕ(0) = 0 e ϕ(−1) = 0.
Ou seja,<−x,y >=−< x,y > .
Portanto, para qualquer inteiro n segue que
< nx,y >=< sgn n(x+ · · ·+x),y >= sgn n(< x,y > + · · ·+ < x,y >)
= sgn n| n |< x,y >= n < x,y > .
Ou seja,ϕ(n) = 0.

1.3 Norma p 16
Dados quaisquer inteiros p, q , q 6= 0, temos
⟨pq
x,y⟩
= p⟨
1q
x,y⟩
= p · qq
⟨1q
x,y⟩
= p · 1q
x,y⟩
=pq〈x,y〉 .
Logo, ϕ(c) = 0, ∀c ∈Q. Da continuidade de ϕ segue que a função é identicamente nula.Portanto, a aplicação < ·, ·> é um produto interno e < x,x >= || x ||2 ∀x ∈ Rn. ¤
Para mais detalhes sobre a demonstração feita acima conferir em [1].
Exemplo 1.7 Agora, consideremos a norma do máximo e tomemos x = e1 e y = e2
| e1 + e2 |2M + | e1− e2 |2M =
(max{| 1 |, | 1 |, | 0 |, · · · , | 0 |})2 +(max{| 1 |, | −1 |, | 0 |, · · · , | 0 |})2 = 2.
Por outro lado,
2(| e1 |2M + | e2 |2M) =
2((max{| 1 |, | 0 |, | 0 |, · · · , | 0 |})2 +(max{| 0 |, | 1 |, | 0 |, · · · , | 0 |})2) = 2 ·2 = 4.
Logo
| e1 + e2 |2M + | e1− e2 |2M 6= 2(| e1 |2M + | e2 |2M).
Deste modo, | · |M não provém de um produto interno, o mesmo pode se afirmar
de | · |S·
1.3 Norma p
Para p≥ 1, definimos a seguinte aplicação | · |p : Rn −→ R dada por
| x |p = (| x1 |p + | x2 |p + · · ·+ | xn |p)1p . (1-6)
Observemos quePara p = 1
| x |1 = (| x1 |+ | x2 |+ · · ·+ | xn |) = | x |S.

1.3 Norma p 17
Para p = 2
| x |2 =(| x1 |2 + | x2 |2 + · · ·+ | xn |2
) 12 = | x |.
Esta última é a conhecida norma euclidiana.
Afirmamos que para p→ ∞; | x |∞ = | x |M. Com efeito,
Para todo x ∈ Rn, existe i tal que | xi | ≥ | x j |; ∀ j = 1, · · · ,n i = 1, · · · ,n,logo
| x |p =[| xi |p
( | x1 |p| xi |p +
| x2 |p| xi |p + · · ·+ | xi |p
| xi |p + · · ·+ | xn |p| xi |p
)] 1p
=
| xi |[( | x1 |
| xi |)p
+( | x2 || xi |
)p
+ · · ·+1+ · · ·+( | xn || xi |
)p] 1p p→∞−→ | xi |.
Assim, limp→∞
| x |p = | xi |= max{| x j |}; j = 1, · · · ,nDeste modo, conclui-se que | x |∞ = | x |M·
Antes do teorema 1.9, enunciaremos a Desigualdade de Hölder, que seránecessária na demonstração da desigualdade triangular para verificar que de fato | · |pé uma norma em Rn.
Lema 1.8 (Desigualdade de Hölder) Sejam 1 ≤ p, p′ ≤ ∞ tais que1p
+1p′
= 1. Dados
x, y ∈ Rn, temos | xy |1 ≤ | x |p| y |p′; [xy = (x1y1, · · · ,xnyn)].
A demonstração do Lema 1.8 pode ser encontrado em [2].
Teorema 1.9 Como definido na expressão (1-6) | x |p; p≥ 1 é uma norma em Rn·
Demonstração. Devemos verificar que | x |p goza das propriedades que estão listadas nadefinição 1.2.
a) | αx |p = (| αx1 |p + | αx2 |p + · · ·+ | αxn |p)1p = [| α |p (| x1 |p + | x2 |p + · · ·+ | xn |p)]
1p
= | α |p (| x1 |p + | x2 |p + · · ·+ | xn |p)1p = | α || x |p
b) Se x 6= 0 então existe i tal que xi 6= 0, i = 1, · · · ,n, logo,
| x |p = (| x1 |p + | x2 |p + · · ·+ | xn |p)1p > 0.
Caso | x |p = 0, então segue da equação (1-6) que xi = 0, ∀i = 1, · · · ,n, ou seja,x = 0·
c) Resta-nos provar a desigualdade triangular que é imediata no caso p = 1. Aquiusaremos o lema 1.8. Então, para 1 < p < ∞ temos:

1.4 Normas Equivalentes 18
| x+y |p p =n
∑j=1| x j + y j |p =
n
∑j=1| x j + y j |p−1| x j + y j | ≤
n
∑j=1| x j + y j |p−1| x j |
+n
∑j=1| x j + y j |p−1| y j | ≤
(n
∑j=1| x j + y j |(p−1)p′
) 1p′
(n
∑j=1| x j |p
) 1p
+
(n
∑j=1| x j + y j |(p−1)p′
) 1p′
(n
∑j=1| y j |p
) 1p
=
(n
∑j=1| x j + y j |p
) 1p (p−1) ( n
∑j=1| x j |p
) 1p
+
(n
∑j=1| x j + y j |p
) 1p (p−1) ( n
∑j=1| y j |p
) 1p
= | x+y |p p−1(| x |p + | y |p
)⇒
| x+y |p p ≤ | x+y |p p−1(| x |p + | y |p
)⇒ | x+y |p ≤ | x |p + | y |p
¤
1.4 Normas Equivalentes
As definições de limite e continuidade dependem diretamente da norma queusamos. Como vimos, existem infinitas normas no espaço vetorialRn e se cada uma defineum conceito de limite teremos a mesma infinidade de noções de limite. Para evitarmostal infortúnio, mostraremos aqui que quaisquer normas em Rn são equivalentes e assim,teremos a mesma noção de limite no espaço euclidiano.
Definição 1.10 Duas normas arbitrárias | · | e || · || em Rn são equivalentes quando
existirem constantes a > 0 e b > 0 tais que:
| x | ≤ a|| x || e || x || ≤ b| x | ∀x ∈ Rn.
Denotaremos esta relação por | · |∼|| · ||.Demonstraremos a seguir que ′′ ∼′′ é de fato uma relação de equivalência.
i) A relação é reflexiva(| · | ∼ | · |)
| x | ≤ | x | ∀x ∈ Rn
ii) A relação é simétrica.Se| x | ∼ || x ||, então || x || ∼ | x |, ∀x ∈ Rn.
iii) A relação é transitivaObservemos que:
| x | ∼ || x || ⇒ existem a,b > 0 tais que | x | ≤ a || x || e || x || ≤ b| x |,∀x∈Rn.

1.4 Normas Equivalentes 19
|| x || ∼ ||| x ||| ⇒ existem c, d > 0 tais que || x || ≤ c||| x ||| e ||| x ||| ≤ d|| x ||,
∀x ∈ Rn.
Assim,
| x | ≤ a|| x || ≤ a · c︸︷︷︸e
||| x |||= e||| x ||| ⇒ | x | ≤ e||| x |||, ∀x ∈ Rn.
||| x ||| ≤ d|| x || ≤ d ·b︸︷︷︸f
| x |= f | x | ⇒ ||| x ||| ≤ f | x |, ∀x ∈ Rn.
Logo, | x | ∼ ||| x |||, ∀x ∈ Rn.A afirmação 1.5 nos diz que as normas do máximo, da soma e euclidiana são
equivalentes. Nosso objetivo é mostrar que duas normas quaisquer em Rn são equiva-lentes. Antes porém, enunciemos o Teorema de Bolzano-Weierstrass, cuja demonstraçãopode ser encontrada em [5].
Teorema 1.11 (Bolzano-Weierstrass) Toda sequência limitada em Rn possui uma sub-
sequência convergente.
Teorema 1.12 Duas normas quaisquer no espaço Rn são equivalentes.
Demonstração. Seja || · || uma norma qualquer em Rn. Mostraremos que || · || é equiva-lente à norma da soma (| · |S).
x ∈ Rn; || x ||= ||n
∑i=1
xiei || ≤n
∑i=1| xi | || ei || ≤ b
n
∑i=1| xi |= b| x |S;
onde b = max{|| e1 ||, || e2 ||, · · · , || en ||}Agora, mostraremos que | x |S ≤ a|| x ||, ∀x ∈Rn. Suponha que essa afirmação
seja falsa, ou seja, suponha que ∀ k ∈ N, existe xk ∈ Rn tal que | xk |S > k|| xk ||.Definiremos a sequência uk =
xk
| xk |S. Logo, || uk || =
1| xk |S
· || xk || <1k
e
| uk |S = 1 ∀k.Portanto (uk)k∈N é limitada em relação a norma da soma. Assim, pelo Teorema
1.11, existe uma subsequência convergente(uk j
)tal que uk j −→ u; u ∈ Rn; isto é:
| uk j −u |S −→ 0. (1-7)
Além disso,0 ≤ | | uk j |S−| u |S | ≤ | uk j −u |S. (1-8)
De (1-7) e aplicando o teorema do confronto em 1-8 segue que
limj→∞
| | uk j |S−| u |S |= 0.

1.5 Produto Vetorial 20
Assim,| u |S = lim
j→∞| uk j |S = 1.
Por outro lado, ∀ j ∈ N temos
|| u ||= || uk j −(uk j −u
) || ≤ || uk j ||+ || uk j −u || ≤ 1k j
+b| uk j −u |S.
Para j −→∞; a última parcela vai para zero e com isso || u ||= 0, donde u = 0. Absurdo!Pois, já vimos que | u |S = 1.Portanto, | · |S ∼ || · ||.
Como a relação de equivalência é reflexiva, simétrica e transitiva concluímosque duas normas quaisquer de Rn são equivalentes. ¤
1.5 Produto Vetorial
Nesta seção definiremos o produto vetorial em Rn, com objetivo de aplicação noterceiro capítulo onde definiremos imersões e submersões no espaço euclidiano.
Definição 1.13 Sejam v1, · · · ,vn−1, n - 1 vetores de Rn, o vetor v ∈Rn tal que, para todo
w ∈ Rn vale a igualdade
< w,v >= det
v1...
vn−1
w
(1-9)
é denominado produto vetorial de v1, · · · ,vn−1 e é denotado por v1×·· ·×vn−1.
Exemplo 1.14 Sejam v1 = (1,2,3) e v2 = (2,−1,0). Calculemos v = v1×v2.
Como a igualdade (1-9) é válida para todo w ∈ R3 então consideraremos os vetores da
base canônica e faremos v = x e1 + y e2 + z e3 para efeito de cálculo.
Para e1 = w :
< e1,v >= det
1 2 32 −1 01 0 0
⇒ x =
∣∣∣∣∣2 3
−1 0
∣∣∣∣∣⇒ x = 3.

1.5 Produto Vetorial 21
Para e2 = w :
< e2,v >= det
1 2 32 −1 00 1 0
⇒ y =−
∣∣∣∣∣1 32 0
∣∣∣∣∣⇒ y = 6.
Para e3 = w :
< e3,v >= det
1 2 32 −1 00 0 1
⇒ z =
∣∣∣∣∣1 22 −1
∣∣∣∣∣⇒ z =−5.
Então, v = (3,6,−5) é o produto vetorial de v1 por v2.
Observemos que
v = xe1 + ye2 + ze3 =
∣∣∣∣∣2 3
−1 0
∣∣∣∣∣e1−∣∣∣∣∣
1 32 0
∣∣∣∣∣e2 +
∣∣∣∣∣1 22 −1
∣∣∣∣∣e3 =
∣∣∣∣∣∣∣
e1 e2 e3
1 2 32 −1 0
∣∣∣∣∣∣∣·
Notemos que < v1,v >= 0 e < v2,v >= 0. De modo que, v é perpendicular a cada vj ;
j = 1,2.
Exemplo 1.15 Sejam v1 = (1,2,0,1), v2 = (1,0,0,−1) e v3 = (0,0,0,1). Calculemos
v = v1×v2×v3.
Como foi feito no exemplo anterior, consideraremos os vetores da base canônica e
faremos v = (x,y,z, t) novamente, para efeito de cálculo.
Para e1 = w :
< e1,(x,y,z, t) >= det
1 2 0 11 0 0 −10 0 0 11 0 0 0
⇒ x = 0.
Para e2 = w :
< e2,(x,y,z, t) >= det
1 2 0 11 0 0 −10 0 0 10 1 0 0
⇒ y = 0.
Para e3 = w :
< e3,(x,y,z, t) >= det
1 2 0 11 0 0 −10 0 0 10 0 1 0
⇒ z = 2.

1.5 Produto Vetorial 22
Para e4 = w :
< e4,(x,y,z, t) >= det
1 2 0 11 0 0 −10 0 0 10 0 0 1
⇒ t = 0.
O vetor (0,0,2,0) é o produto vetorial.
Observemos que < v1,v >= 0, < v2,v >= 0 e < v3,v >= 0. De modo que, v é
perpendicular a cada vj; j = 1,2,3.
A afirmação descrita acima é uma das propriedades do produto vetorial. Narealidade, valem as seguintes propriedades:
1. v1×v2×·· ·×vn−1 = 0 se os vetores v1, · · · ,vn−1 forem linearmente dependentes;
2. v1×v2×·· ·×vn−1 é perpendicular a cada vj;
As demonstrações destas propriedades pode ser encontrada em [5].

1.6 A Norma de uma Transformação Linear 23
1.6 A Norma de uma Transformação Linear
Encerraremos este capítulo apresentando a definição de norma de uma transfor-mação linear. Antes de apresentarmos esta definição provaremos a seguinte afirmação.
Afirmação 1.16 Se T : Rn −→ Rm é uma transformação linear, então ∃ c > 0 tal que
| T x |≤ c| x |, ∀ x ∈ Rn.
Demonstração. Consideremos e1,e2, · · · ,en a base canônica de Rn, temos
| T x |= | T (x1e1 + x2e2 + · · ·+ xnen) | ≤ | x1 || T e1 |+ · · ·+ | xn || T en |.
Tomemos c = max{| T e1 |, | T e2 |, · · · , | T en |}. Então
| T x | ≤ c(| x1 |+ · · ·+ | xn |) = c| x |S.
Como duas normas quaisquer em Rn são equivalentes, concluímos que
| T x |≤ c| x |, ∀x ∈ Rn. (1-10)
¤
Para introduzirmos o conceito de norma de uma transformação linear, énecessário mostrarmos que toda transformação linear T : Rn −→ Rm é contínua. Antes,porém iremos apresentar a definição de aplicação Lipschitziana, a qual nos auxiliará nacontinuidade.
Definição 1.17 Dado U ⊂Rn, uma aplicação f : U −→Rm diz- se Lipschitziana quando
existe k > 0 tal que, para quaisquer x,y ∈U, tem-se | f (x)− f (y) | ≤ k| x−y |.
O número k é chamado uma constante de Lipschitz de f .
Definição 1.18 Uma aplicação f : U −→ Rm diz-se contínua no ponto a ∈U se
∀ ε > 0, ∃ δ > 0 tal que x ∈U com | x−a |< δ⇒ | f (x)− f (a) |< ε.
Se f : U −→Rm é contínua em todos os pontos do conjunto U , então diz-se quef é uma aplicação contínua.
Afirmação 1.19 Toda aplicação Lipschitziana é contínua.
Demonstração. A demonstração é imediata. Dado ε > 0 basta tomarmos δ = εk . ¤

1.6 A Norma de uma Transformação Linear 24
Segue da expressão (1-10) que toda transformação linear T : Rn −→ Rm élipschitziana. De fato
| T x−T y |= | T (x−y) | ≤ c| x−y | ∀ x,y ∈ Rn.
Portanto, toda transformação linear T é contínua.Antes de apresentarmos o conceito de norma de uma transformação, faremos
alguns breves comentários.Consideremos a esfera unitária Sn−1 = {x ∈ Rn; | x | = 1}. Neste caso, a ex-
pressão (1-10) reduz-se a | T x | ≤ c. Logo, a esfera unitária Sn−1 é transformada por T emum subconjunto limitado de Rm.
Com esta última consideração, temos condições de apresentar a seguintedefinição.
Definição 1.20 O número
| T |= sup{| T x |;x ∈ Sn−1}
chama-se a norma da transformação T .
Afirmação 1.21 Para todo vetor u ∈ Rn tem-se | T u | ≤ | T || u |.Demonstração. Quando u = 0 a desigualdade é facilmente verificada. No caso em que
u 6= 0, temos que u|u| ∈ Sn−1. Como T é uma transformação linear, então
| T u |=∣∣∣∣T
(u| u | · | u |
)∣∣∣∣ = | u || T(
u| u |
)| ≤ | T || u |.
Portanto, | T u | ≤ | T || u |. ¤
Agora, verificaremos que, de fato, | T | cumpre as condições da definição 1.2.Com efeito,
1) | T +S | = sup{| (T +S)x |;x ∈ Sn−1} = sup{| T x+Sx |;x ∈ Sn−1} ≤sup{| T x |+ | Sx |;x ∈ Sn−1} = sup{| T x |;x ∈ Sn−1}+ sup{| Sx |;x ∈ Sn−1} =| T |+ | S |.
2) | λT |= sup{| λT x |;x ∈ Sn−1}= | λ |sup{| T x |;x ∈ Sn−1}= | λ || T |.
3) Se x = 0 então | T |= 0.Se | T |= 0 então sup{| T x |;x ∈ Sn−1}= 0⇒ | T x |= 0⇒ x = 0.Caso x 6= 0 então | T |= sup{| T x |;x ∈ Sn−1}> 0.

1.6 A Norma de uma Transformação Linear 25
É possível determinarmos a norma | T | em função dos elementos ti j associadosa matriz da transformação T . A tabela seguinte, que pode ser conferida integralmente em[5] nos mostra o que ocorre com as normas do máximo e da soma. Neste caso, 1≤ i≤ m
e 1≤ j ≤ n.
Norma em Rn Norma em Rm Norma de T : Rn −→ Rm
do máximo do máximo | T |= maxi
(∑j| ti j |)
da soma da soma | T |= maxj
(∑i| ti j |)
do máximo da soma | T |= maxi, j| ti j |
| T | ≤∑i, j| ti j |
Tabela 1.1: Normas

CAPÍTULO 2Aplicações Diferenciáveis
Neste capítulo introduzimos o conceito de diferenciabilidade. Na seção 1.4,mostramos que duas normas quaisquer são equivalentes. Assim, uma aplicação ser ounão diferenciável independe da norma empregada.
2.1 Diferenciabilidade
Definição 2.1 Seja U um aberto de Rn. Uma função f : U ⊂ Rn −→ Rm é diferenciável
em a ∈U se existe uma transformação linear λ : Rn −→ Rm tal que:
limh→0
|| f (a+h)− f (a)−λ(h) ||| h | = 0
onde | · | e || · || são normas quaisquer em Rn e Rm, respectivamente.
Teorema 2.2 Se f é diferenciável em a a transformação linear λ : Rn −→ Rm é única.
Demonstração. Suponha que exista µ : Rn −→ Rm; µ ∈ LR(Rn;Rm) tal que:
limh→0
|| f (a+h)− f (a)−µ(h) ||| h | = 0
Temos que:
limh→0
|| µ(h)−λ(h) ||| h | = lim
h→0
|| µ(h)+ f (a+h)− f (a+h)+ f (a)− f (a)−λ(h) ||| h |
≤ limh→0
|| f (a+h)− f (a)−λ(h) ||| h | + lim
h→0
|| f (a+h)− f (a)−µ(h) ||| h | = 0
Seja h = tx; x ∈ Rn, sendo µ e λ transformações lineares, temos:
0 = limh→0
|| µ(h)−λ(h) ||| h | = lim
t→0
|| µ(tx)−λ(tx) ||| tx | =
|| µ(x)−λ(x) ||| x | ⇒ || µ(x)−λ(x) ||= 0
⇒ µ(x) = λ(x), ∀x ∈ Rn.

2.1 Diferenciabilidade 27
¤
A transformação linear λ dada na definição 2.1 é uma boa aproximação para oacréscimo f (a+h)− f (a) na vizinhança do ponto a; além disso, acabamos de demonstrarque essa transformação λ é única, esta é chamada a derivada de f no ponto a e denotadapor f ′(a).
Exemplo 2.3 Seja f : R−→ R dada por f (x1) = x21. Observemos que f ′(2) = 4.
A transformação linear λ : R−→ R é definida por: λ(h) = 4 ·h.
Como limh→0
| f (2+h)− f (2)−4h || h | = 0, segue da definição 2.1 que f é diferenciá-
vel no ponto a = 2. Sua derivada neste ponto é a aplicação λ : R −→ R, dada por
λ(h) = f ′(2) ·h = 4h.
Exemplo 2.4 Seja f : R2 −→ R dada por: f (x1,x2) = x21 + 2x1x2 + x2
2. Observemos que
f ′(1,2) = (6 6)A transformação linear λ é definida por:
λ : R2 −→ R
λ(h1,h2) 7−→ J ·(
h1
h2
),
onde J =(
6 6)
, portanto
λ(h1,h2) = 6h1 +6h2.
Como limh→0
| f (1+h1,2+h2)− f (1,2)−6h1−6h2 || h | = 0, segue da definição 2.1 que f é
diferenciável em a = (1,2). Sua derivada é portanto a aplicação λ acima.
Observação 2.5 Se f : U −→ Rm, definida no aberto U ⊂ Rn, é diferenciável no ponto
a ∈U, então sua derivada f ′(a) : Rn −→ Rm, é caracterizada pela igualdade:
f (a+h)− f (a) = f ′(a) ·h+ρ(h)| h | , com limh→0
ρ(h) = 0. (2-1)
De onde concluímos que, f é diferenciável no ponto a se o mesmo acontece para cada
uma de suas funções coordenadas fi : U −→ R.
Muitos dos resultados válidos para funções de uma variável também se aplicamno espaçoRn. A fim de tornar alguns resultados mais compreensíveis, suas demonstraçõesserão substituídas por exemplos.

2.1 Diferenciabilidade 28
Teorema 2.6 Se f : Rn −→ Rm é diferenciável em a então f é contínua em a.
Demonstração. A demonstração é consequência imediata da igualdade (2-1). ¤
Sejam f :Rn −→Rm e g :Rm −→Rp duas funções tais que Im f ⊂Dg, a funçãocomposta g◦ f é definida pela relação (g◦ f )(x) = g( f (x)), x ∈ D f .
Teorema 2.7 (Regra da Cadeia) Sendo f : Rn −→ Rm diferenciável em a e sendo g :Rm −→ Rp diferenciável em b = f (a), tem-se que a composta g ◦ f : Rn −→ Rp é
diferenciável em a e se verifica (g◦ f )′(a) = g′( f (a)) · f ′(a).
Demonstração. Sejam f e g diferenciáveis, logo
f (a+h)− f (a) = f ′(a) ·h+ρ(h)| h | , com limh→0
ρ(h) = 0.
g(b+ v)−g(b) = g′(b) · v+σ(v)| v | , com limv→0
σ(v) = 0.
Assim,(g◦ f )(a+h) = g( f (a)+ f ′(a) ·h+ρ(h)| h |).
Fazendo v = f ′(a) ·h+ρ(h)| h | temos:
(g◦ f )(a+h) = g(b)+g′(b) · v+σ(v)| v |= g(b)+(g′(b) · f ′(a)) ·h+C(h)| h |;
onde C(h) = g′(b) ·ρ(h)+σ(v) ·∣∣∣∣ f ′(a) · h
| h | +ρ(h)∣∣∣∣.
Como limh→0
C(h) = 0, então
(g◦ f )(a+h)−g( f (a)) = (g′( f (a)) · f ′(a)) ·h+C(h)| h |; com limh→0
C(h) = 0.
¤
Observação 2.8 Sejam f ,g : Rn −→ R diferenciáveis em a, valem as seguintes regras
1) ( f +g)′(a) = f ′(a)+g′(a).
2) ( f g)′(a) = g(a) f ′(a)+ f (a)g′(a).
3)(
fg
)′(a) =
g(a) f ′(a)− f (a)g′(a)[g(a)]2
; com g(a) 6= 0.

2.2 Derivadas Parciais 29
2.2 Derivadas Parciais
Definição 2.9 Seja f : U ⊂ Rn −→ R uma função definida no aberto U e seja a ∈ Rn;
a = (a1,a2, · · · ,an). Se existe o limite
limh→0
f (a1, · · · ,ai +h,ai+1, · · · ,an)− f (a1, · · · ,an)h
,
este será denotado por∂ f∂xi
(a), e é chamada de i-ésima derivada parcial de f no ponto a.
Sejag : R −→ R
xi 7−→ g(xi) = f (a1, · · · ,ai−1,xi,ai+1, · · · ,an)
com g′(ai) =∂ f∂xi
(a).Geometricamente temos que∂ f∂xi
(a) é a inclinação da reta tan-
gente à s; onde s é a curva obtida pela intersecção do gráfico de f com o plano(a1, · · · ,ai−1,xi,ai+1, · · · ,xn+1).
No caso n = 2 o gráfico de f é uma superfície em R3, e assim,∂ f∂x1
(a) é a
inclinação da reta tangente à curva, que é obtida pela intersecção do gráfico de f como plano x2 = a2. Observe a figura 2.1.
Teorema 2.10 Se f : Rn −→ Rm é diferenciável no ponto a então existem as derivadas
parciais∂ fi
∂x j(a); 1 ≤ i ≤ m e 1 ≤ j ≤ n e a matriz da transformação linear f ′(a) é a
matriz J definida por
J f (a) =(
∂ fi
∂x j(a)
)
mxn.
Esta matriz é chamada de matriz jacobiana de f no ponto a. Observemos:
J f (a)(e j) =(
∂ f1
∂x j(a)
)e1 +
(∂ f2
∂x j(a)
)e2 + · · ·+
(∂ fm
∂x j(a)
)em,
onde j = 1, · · · ,n e e1, · · · ,em é a base canônica de Rm.Cada um dos vetores da base canônica de Rn descritos pela expressão acima formam umacoluna da matriz jacobiana, logo,
J f (a) =
∂ f1∂x1
(a) ∂ f1∂x2
(a) · · · ∂ f1∂x j
(a) · · · ∂ f1∂xn
(a)∂ f2∂x1
(a) . . . · · · ∂ f2∂x j
(a) · · · ∂ f2∂xn
(a)...
......
......
......
... · · · ∂ fi∂x j
(a) · · · ......
... · · · ... · · · ...∂ fm∂x1
(a) ∂ fm∂x2
(a) · · · ∂ fm∂x j
(a) · · · ∂ fm∂xn
(a)

2.2 Derivadas Parciais 30
Figura 2.1: Interpretação Geométrica: Derivada Parcial
Observação: Sendo f uma função diferenciável, então pela definição 2.1 existe umatransformação linear λ : Rn −→ Rm tal que: λ(h) = f ′(a) · h. Como visto no primeirocapítulo, para cada transformação linear existe uma matriz associada a ela. Vimos acimaque a matriz que cumpre bem esta tarefa é a matriz jacobiana, logo, existe J f (a) noconjunto das matrizes de ordem m x n de modo que: λ(h) = J f (a) · h. No entanto, estamatriz associada a transformação linear é única. Portanto, J f (a) = f ′(a).
Apresentaremos a seguir dois resultados. O primeiro é uma condição suficiente,mas não necessária para a diferenciabilidade e o segundo, é uma condição necessária, masnão suficiente para a existência de pontos de máximo e mínimo locais.
Teorema 2.11 Seja f :Rn −→Rm, se todas as derivadas parciais∂ fi
∂x j(x) existem em um
aberto contendo a e são contínuas em a, então f é diferenciável em a.
O próximo exemplo nos mostra que não vale a recíproca do teorema anterior, ou seja, estacondição é apenas suficiente.

2.2 Derivadas Parciais 31
Exemplo 2.12 Seja f : R2 −→ R, definida por
f (x1,x2) =
(x21 + x2
2)sen(
1x2
1+x22
)se (x1,x2) 6= (0,0)
0 se (x1,x2) = (0,0)
Pela definição 2.9 resulta que∂ f∂x1
(0,0) = 0. Além disso, esta derivada não é contínua na
origem, embora f seja diferenciável com f ′(0,0) = (0 0).
Teorema 2.13 Seja f : A −→ R, definida num aberto A ⊂ Rn. Suponha que o máximo
(mínimo) de f ocorra em a no interior de A. Se existir∂ f∂xi
(a), então∂ f∂xi
(a) = 0.
Demonstração. Seja
g : R −→ Rx 7−→ g(x) = f (a1, · · · ,x, · · · ,an)
Como a é ponto de máximo (mínimo) de f então ai é ponto de máximo (mínimo) de g,
logo, temos: g′(ai) = 0. Portanto,∂ f∂xi
(a) = 0. ¤
Exemplo 2.14 Seja f : R2 −→ R, definida por f (x1,x2) = x21− x2
2.
Temos que∂ f∂x1
(0,0) = 0 e∂ f∂x2
(0,0) = 0. No entanto, a origem não é ponto de máximo
nem de mínimo local, observe o gráfico 2.2.
Figura 2.2: Sela

2.3 Derivada Direcional 32
O exemplo mostra claramente que não vale a recíproca do teorema 2.13, ou seja, acondição é apenas necessária. A seguir enunciaremos sem demonstração o Teorema deSchwarz.
Teorema 2.15 (Teorema de Schwarz) Se f : U −→R é de classe C 2 no aberto U ⊂Rn
então, para quaisquer i, j = 1, · · · ,n e x ∈U, tem-se
∂2 f∂xi∂x j
(x) =∂2 f
∂x j∂xi(x)
Exemplo 2.16 Seja f : R2 −→ R, definida por:
f (x1,x2) =
x1x2(x21− x2
2)x2
1 + x22
se x21 + x2
2 6= 0
0 se x21 + x2
2 = 0
Um longo cálculo mostra que∂2 f
∂x2x1(0,0) = −1 e que
∂2 f∂x1x2
(0,0) = 1. Observemos que
∂2 f∂x2x1
não é contínua na origem.
O exemplo acima mostra-nos que a existência das derivadas de segunda ordem na origemnão garante que ∂2 f
∂x2x1(0,0) = ∂2 f
∂x1x2(0,0).
2.3 Derivada Direcional
Definição 2.17 Sejam f : U −→ R, definida no aberto U ⊂ Rn; a ∈U e v ∈ Rn. Se
limt→0
f (a+ tv)− f (a)t
existe, este é chamado de derivada de f no ponto a na direção do vetor v e é denotado
por∂ f∂v
(a), isto é
∂ f∂v
(a) = limt→0
f (a+ tv)− f (a)t
.
A seguir observamos que a derivada direcional pode ser vista como a derivadade uma composição. Para isto, consideremos o segmento de reta
λ : (−ε,ε) −→ Rn
t 7−→ λ(t) = a+ tv,
onde ε é tomado suficientemente pequeno de modo que a+ tv ∈U , conforme figura 2.3.

2.4 Fórmula de Taylor 33
Figura 2.3: Derivada Direcional
Assim,( f ◦λ) : (−ε,ε) −→ R
t 7−→ ( f ◦λ)(t),
é tal que :
limt→0
( f ◦λ)(t)− ( f ◦λ)(0)t
= ( f ◦λ)′(0)
Portanto, ( f ◦λ)′(0) =∂ f∂v
(a).
2.4 Fórmula de Taylor
Seja f : U ⊂Rn −→R definida num aberto U contendo a e seja v = (α1, · · · ,αn).Temos:
f ′(a) · v =[
∂ f∂x1
(a) ∂ f∂x2
(a) · · · ∂ f∂xn
(a)]
α1
α2...
αn
=n
∑i=1
∂ f∂xi
(a)αi.

2.4 Fórmula de Taylor 34
Vamos observar qual a forma de f ′′(a) · v2
f ′(a) : Rn −→ Rn
(x1, · · · ,xn) 7−→ ( ∂ f∂x1
(a), · · · , ∂ f∂xn
(a))
f ′′(a) · v =
∂2 f∂x2
1(a) · · · ∂2 f
∂xn∂x1(a)
... · · · ...∂2 f
∂x1∂xn(a) · · · ∂2 f
∂x2n(a)
α1
α2...
αn
=
n
∑i=1
∂2 f∂xi∂x1
(a) ·αi
...n
∑i=1
∂2 f∂xi∂xn
(a) ·αi
f ′′(a) · v2 =[
α1 · · · αn
]
n
∑i=1
∂2 f∂xi∂x1
(a) ·αi
...n
∑i=1
∂2 f∂xi∂xn
(a) ·αi
=n
∑i, j=1
∂2 f∂xi∂x j
(a) ·αiα j. (2-2)
Usando o mesmo argumento, segue que
f ′′′(a) · v3 = ∑i, j,k
∂3 f∂xi∂x j∂xk
(a)αiα jαk.
Agora podemos apresentar a fórmula de Taylor para uma função f : U ⊂ Rn −→ R. Paraisto consideremos a função
ϕ : R −→ Rt 7−→ ϕ(t) = f (a+ tv)
A série de MacLaurin para ϕ é dada por
ϕ(t) = ϕ(0)+ϕ′(0)t +12!·ϕ′′(0)t2 + · · ·+ 1
p!·ϕp(0)t p + rp. (2-3)
Temos que
ϕ(0) = f (a), ϕ′(0) = f ′(a) · v, ϕ′′(0) = f ′′(a) · v2, · · · ,ϕ(p)(0) = f (p)(a) · vp.
Portanto, fazendo t = 1 em (2-3), obtemos a expressão
f (a+ v) = f (a)+ f ′(a) · v+12!
f ′′(a) · v2 + · · ·+ 1p!
f p(a) · vp + rp(v).

2.5 Hessiana 35
Seguem três resultados principais da Fórmula de Taylor:
1. Fórmula de Taylor Infinitesimal: Se f é p vezes diferenciável em a, então
limv→0
rp(v)| v |p = 0. (2-4)
2. Resto de Lagrange: Supondo [a,a + v] ⊂U , f de classe C p, p + 1 vezes diferen-ciável no segmento (a,a+ v), então ∃ θ ∈ (0,1) tal que:
rp(v) =1
(p+1)!f p+1(a+θv) · vp+1. (2-5)
3. Resto Integral: Se f é de classe C p+1 e [a,a+ v]⊂U , então
rp(v) =1p!
∫ 1
0(1− t)p · f p+1(a+ tv) · vp+1dt. (2-6)
2.5 Hessiana
A forma quadrática é definida como sendo uma função H :Rn −→R cujo valor
num vetor v = (α1, · · · ,αn) é dado por H(v) =n
∑i, j=1
hi jαiα j, onde (hi j) é uma matriz de
ordem n. O valor da forma quadrática H no vetor v é indicado pela notação H(v) = H ·v2.Conforme a igualdade (2-2), sabemos que f ′′(a) define uma forma quadrática;
esta é conhecida como forma Hessiana da função f no ponto a. Seja f : U ⊂ Rn −→ Rduas vezes diferenciável, sua forma hessiana no ponto x∈U será indicada por H(x) onde;H(x) = f ′′(x).
Conforme a igualdade (2-2), para n = 2 a matriz Hessiana de uma função f noponto x é dada por
∂2 f∂x2
1(x) ∂2 f
∂x2∂x1(x)
∂2 f∂x1∂x2
(x) ∂2 f∂x2
2(x)
.
O teorema de Schwarz garante que a matriz Hessiana de f no ponto x é simétrica.
Definição 2.18 Seja f : U −→R, definida num aberto U ⊂Rn, diferenciável. Um ponto
a ∈ U chama-se ponto crítico de f ( ou ponto singular) quando f ′(a) = 0; ou seja,∂ f∂x1
(a) =∂ f∂x2
(a) = · · ·= ∂ f∂xn
(a) = 0
Definição 2.19 Diz-se que a função f tem um máximo (respectivamente, mínimo) local
no ponto a∈U quando existe δ > 0, tal que | v |< δ ⇒ f (a+v)≤ f (a) ( respectivamente,
f (a)≤ f (a+ v)).

2.5 Hessiana 36
Afirmação 2.20 Se f é diferenciável e tem um máximo local ( ou mínimo local) no ponto
a, então a é um ponto crítico de f .
Demonstração. Sejaϕi : R −→ R
t 7−→ ϕi(t) = f (a+ tei).
Como a é ponto de máximo local de f , então 0 é ponto de máximo para cada ϕi(t),i = 1, · · · ,n. Segue que ϕ′i(0) = 0.
Sabendo que ϕ′i(t) =∂ f∂xi
(a+ tei) temos: ϕ′i(0) =∂ f∂xi
(a) ⇒ ∂ f∂xi
(a) = 0
Logo, a é ponto crítico de f . ¤
Definição 2.21 Se f ∈ C 2, o ponto crítico a diz-se não degenerado quando a matriz
Hessiana nesse ponto é invertível, e equivalentemente det(
∂2 f∂xi∂x j
(a))6= 0.
Exemplo 2.22 Seja f : R2 −→ R definida por: f (x,y) = x2 + y2.
De acordo com a definição 2.18 temos que a origem é um ponto crítico de f que possui a
seguinte matriz Hessiana: [2 00 2
]
A matriz é invertível, logo, pela definição 2.21, a origem é um ponto crítico não degene-
rado de f.
Seja H : Rn −→ R uma forma quadrática, dada por H(v) = ∑i, j
hi jαiα j para
v = (α1, · · · ,αn). A forma H é positiva quando tivermos H(v) > 0, ∀v 6= 0 em Rn. Caso,H(v) < 0, ∀v 6= 0, H é dita negativa. Sendo positiva ou negativa é uma forma definida.Quando existem vetores v,w ∈ Rn tais que H(v) > 0 e H(w) < 0 então H é uma formaquadrática indefinida.
Afirmação 2.23 Se uma forma quadrática H é definida então sua matriz (hi j) é neces-
sariamente invertível.
Demonstração. Seja H0 : Rn −→ Rn; uma transformação linear cuja matriz associadaseja (hi j).Temos, H · v2 =< H0 · v,v >. Como H é definida segue que H0 · v 6= 0, ∀v 6= 0. Logo, onúcleo da transformação H0 só possui o vetor nulo como elemento, de modo que H0 éinvertível. ¤
Conclui-se que se a forma Hessiana de uma função de classe C 2, num pontocrítico a é positiva ou negativa, o ponto crítico em questão é não-degenerado.

2.6 Funções Inversa e Implícita 37
Teorema 2.24 Sejam f : U −→ R uma função de classe C 2, a ∈U um ponto crítico de
f e H a forma quadrática Hessiana de f no ponto a. Então:
1. Se H é positiva, a é um ponto de mínimo local não-degenerado;
2. Se H é negativa, a é um ponto de máximo local não-degenerado;
3. Se H é indefinida, a não é ponto de mínimo local nem de máximo local para f .
Exemplo 2.25 Seja v = (α1,α2), no caso do exemplo 2.22 a forma quadrática de f é
dada por
H · v2 = 2α21 +2α2
2 > 0, ∀v 6= 0.
Assim, pelo teorema 2.24, a origem é um ponto de mínimo local não degenerado de
f (x,y) = x2 + y2.
Exemplo 2.26 Seja f : R2 −→ R, definida por f (x1,x2) = x21− x2
2. Sua matriz hessiana
na origem é dada por:
H =
[2 00 −2
]
Existem vetores e1 = (1,0) e e2 = (0,1) tais que H · e12 = 2 > 0 e H · e2
2 =−2 < 0. De
modo que, H é indefinida. Então, pelo teorema 2.24 a origem não é ponto de mínimo nem
de máximo local de f . Neste caso, a origem é chamada de ponto de sela devido a forma
do gráfico de f . Observe a figura 2.2.
2.6 Funções Inversa e Implícita
Consideremos o caso de uma função de uma váriavel. Seja f : R −→ Rcontinuamente diferenciável 1 em um aberto contendo a e que f ′(a) 6= 0.
Se f ′(a) > 0, então ∃ V aberto; a ∈V tal que f ′(x) > 0 ∀x ∈V .Tem-se que f é crescente em V , consequentemente, uma função bijetora, que
admite inversa f−1 definida num aberto W contendo f (a).
( f ◦ f−1)(y) = y ; y = f (x)
(( f ◦ f−1)(y))′ = 1
1Dada f : Rn −→ Rm, se existirem todas as derivadas parciais ∂ fi∂x j
em um aberto contendo a e, além
disso, cada função ∂ fi∂x j
for contínua, dizemos então que f é continuamente diferenciável em a.

2.6 Funções Inversa e Implícita 38
Figura 2.4: Função Inversa
Pela regra da cadeia para função de uma variável, temos a igualdade
( f−1)′(y) =1
f ′( f−1(y))
O resultado acima pode ser generalizado para f : Rn −→ Rn, conforme teorema abaixo,cuja demonstração pode ser encontrada em [7].
Teorema 2.27 (Teorema da Função Inversa) Seja f : Rn −→ Rn continuamente dife-
renciável em um aberto contendo a, onde det f ′(a) 6= 0. Então existem um aberto V ⊂Rn
contendo a e um aberto W ⊂ Rn contendo f (a) tais que f : V −→W possui uma in-
versa contínua e diferenciável f−1 : W −→V , e além disso, ( f−1)′(y) = [ f ′( f−1(y))]−1,
∀y ∈W.
O exemplo que apresentaremos a seguir será utilizado no próximo capítulo, massua inserção neste momento é para aplicarmos o Teorema da Função Inversa.
Exemplo 2.28 Seja f : R22 −→ R22 definida por f (X) = X2, onde X é a matriz de 2linhas e 2 colunas. Sua derivada em cada ponto X, é a transformação linear f ′(X) :R22 −→ R22 dada por
f ′(X) ·V = V ·X +X ·V (2-7)
Verificaremos que a expressão (2-7) satisfaz a definição 2.1. Para isto, consideremos
A =
[a1 a2
a3 a4
]e V =
[v1 v2
v3 v4
]
Segue que
f (A+V )− f (A)− f ′(A) ·V =
[v1
2 + v2v3 v1v2 + v2v4
v3v1 + v4v3 v3v2 + v42
]

2.6 Funções Inversa e Implícita 39
Para facilitar os cálculos tomaremos a norma do máximo em R22, utilizando a tabela 1.1
e o teorema do Confronto concluímos que
limV→0
| f (A+V )− f (A)− f ′(A) ·V ||V | = 0.
Portanto, f ′(X) ·V = V ·X +X ·V.
Observemos que a transformação no ponto X = I, onde I é a matriz identidade é dada
por
f ′(I) ·V = 2V.
A transformação f ′(I) :R22 −→R22 é um isomorfismo. Logo, pelo Teorema da Função
Inversa (2.27) existem um aberto Z contendo I e um aberto W contendo f (I) tais que
f : Z −→W possui uma inversa contínua e diferenciável f−1 : W −→ Z e, além disso,
f−1(X) =√
X. Assim, toda matriz Y suficientemente próxima da identidade possui uma
raíz quadrada, a qual é única quando a consideramos nesta vizinhança.
O teorema seguinte é consequência do teorema da Função Inversa e é conhecido comoTeorema da Função Implícita. Sua demonstração pode ser encontrada em [7].
Teorema 2.29 (Teorema da Função Implícita) Sejam f : Rn x Rm −→ Rm continua-
mente diferenciável em um aberto que contenha (a,b) e f (a,b) = 0. Seja M a matriz
m x m dada por :(
∂ fi(a,b)∂xn+ j
)1 ≤ i, j ≤ m. Supondo que detM 6= 0, existe um aberto
A ⊂ Rn que contém a e um aberto B ⊂ Rm que contém b, para os quais se tem: dado
qualquer x ∈ A, ∃! g(x) ∈ B tal que f (x,g(x)) = 0. A função g assim definida resulta
diferenciável.
A funçãog : A −→ B
x 7−→ y = g(x)
está definida implicitamente pela equação f (x,y) = 0.A seguir usaremos o Teorema da Função Implícita (2.29) para mostrar que o
sistema
u2 + 2vy1y3 = 1v + y1 + y2
2 = 0u + y1 + y3 = 3
pode ser resolvido, obtendo (y1,y2,y3) em função de (u,v) numa vizinhança de (1,−1).
Exemplo 2.30 Seja f a aplicação dada por
f : R2xR3 −→ R3
(x,y) 7−→ f (x,y) = (u2 +2vy1y3−1,v+ y1 + y22,u+ y1 + y3−3),

2.6 Funções Inversa e Implícita 40
onde x 7−→ (u,v) e y 7−→ (y1,y2,y3).Temos que f é continuamente diferenciável num aberto contendo (a,b) onde
a = (1,−1) e b = (0,1,2) e ainda temos f (a,b) = (0,0,0). Consideremos a matriz M
dada por
M =
∂ f1∂y1
(a,b) ∂ f1∂y2
(a,b) ∂ f1∂y3
(a,b)∂ f2∂y1
(a,b) ∂ f2∂y2
(a,b) ∂ f2∂y3
(a,b)∂ f3∂y1
(a,b) ∂ f3∂y2
(a,b) ∂ f3∂y3
(a,b)
=
−4 0 0
1 2 01 0 1
Como detM 6= 0, então pelo teorema 2.29 existe uma vizinhança A de (1,−1)e uma vizinhança B de (0,1,2) para as quais temos que ∀x ∈ A , ∃!g(x) ∈ B tal que
f (x,g(x)) = 0. A função g é dada por
g : R2 −→ R3
x 7−→ g(x) = (y1,y2,y3).
Como f (x,g(x)) = 0, então obtemos o sistema
u2 + 2vy1y3 = 1v + y1 + y2
2 = 0u + y1 + y3 = 3
com isso, concluímos que podemos resolver o sistema obtendo (y1,y2,y3) em função de
(u,v) numa vizinhança A de (1,−1), de acordo com o Teorema da Função Implícita.
Para finalizarmos devemos observar que como f (a,b) = (0,0,0) , então
(a,b) = (1,−1,0,1,2) é solução do sistema
u2 + 2vy1y3 = 1v + y1 + y2
2 = 0u + y1 + y3 = 3.

CAPÍTULO 3Imersões e Submersões
3.1 Imersão
Definição 3.1 Uma imersão do aberto U ⊂Rn no espaço euclidianoRm é uma aplicação
diferenciável f : U −→Rm tal que, para cada x ∈U, a derivada f ′(x) :Rn −→Rm é uma
transformação linear injetiva.
Observemos que se f é uma imersão, então dimN ( f ′(x)) = 0, ∀x ∈U . Pelo Teoremado Núcleo e da Imagem temos que dimI m( f ′(x)) = n, mas dimI m( f ′(x))≤m. Portanto,n≤ m.
Exemplo 3.2 Seja f a aplicação inclusão dada por
f : Rn −→ Rn x Rm
x 7−→ f (x) = (x,0).
Como f é linear então f ′(x) · v = f (v), ∀x ∈ Rn. Como f é injetiva temos que f ′(x)também o é. Logo, f é uma imersão C ∞.
Exemplo 3.3 Sejam p0 = (x0,y0,z0) um ponto de R3, a = (a1,a2,a3) e b = (b1,b2,b3)vetores linearmente independentes de R3. Consideremos a aplicação X : R2 −→ R3 que
para cada (u,v) ∈ R2, associa X(u,v) = p0 +ua+ vb, isto é,
X(u,v) = (x0 +ua1 + vb1,y0 +ua2 + vb2,z0 +ua3 + vb3)
X ′(u,v) =
a1 b1
a2 b2
a3 b3
Vamos verificar que X ′(u,v) é injetiva:
Se X ′(u,v)
(h1
k1
)= X ′(u,v)
(h2
k2
)⇒
a1h + b1k = 0a2h + b2k = 0a3h + b3k = 0

3.1 Imersão 42
com h = h1− h2 e k = k1− k2. Como a e b são vetores linearmente independentes
de R3, temos que o posto de X ′(u,v) é igual a 2; usando o teorema do posto ( ver [5]),
concluímos que o sistema homogêneno acima possui, somente, a solução nula. Donde,
h1 = h2 e k1 = k2. Portanto, X(u,v) é uma imersão de R2 em R3.
A seguir enunciaremos um critério para verificar a injetividade da aplicaçãof ′(x), que pode ser encontrado por exemplo em [8].
Proposição 3.4 Sejam f : U ⊂ Rn −→ Rm, n ≤ m uma aplicação diferenciável e J f (x)sua matriz jacobiana em x ∈ U. Denotaremos por Ji f (x) as colunas desta matriz e
observemos que as seguintes afirmações são equivalentes:
a) f ′(x) é injetora para x ∈U;
b) A matriz J f (x) tem posto n para x ∈U;
c) Os vetores Ji f (x); i = 1, · · · ,n são linearmente independentes;
d) O produto vetorial J1 f (x) x · · · x Jn f (x) é não nulo.
O posto de uma aplicação diferenciável f : U −→Rm num ponto x ∈U é o postoda sua derivada f ′(x) : Rn −→ Rm. Uma imersão f : U −→ Rm, definida num abertoU ⊂Rn, tem posto n em todos os pontos x∈U ; por isso, é chamada de aplicação de posto
máximo. Reciprocamente, uma aplicação diferenciável f : U −→ Rm, U ⊂ Rn, n ≤ m deposto n é uma imersão.
Exemplo 3.5 Seja g : R2 −→ R3; g(u,v) = (asenvcosu,asenvsenu,acosv); a > 0
Jg(u,v) =
−asenvsenu acosvcosu
asenvcosu acosvsenu
0 −asenv
Temos que para v = kπ; k ∈Z a matriz Jg(u,v) possui posto 1. Logo, a aplicação
g não é uma imersão de R2 em R3. Notemos que se definirmos g : U ⊂ R2 −→ R3; com
U = {(u,v) ∈ R2;u ∈ R e 0 < v < π} teremos uma imersão de U em R3.
Notemos que a imagem g(U) é a esfera de centro na origem e raio a, menos os pólos.
Exemplo 3.6 Seja J ⊂ R um intervalo aberto. Um caminho diferenciável α : J −→ Rm
é uma imersão se, e somente se, seu vetor velocidade α′(t) é diferente de zero para todo
t ∈ J. De fato, suponhamos que α(t) = (x1(t),x2(t), · · · ,xm(t)) é uma imersão. Então a
matriz jacobiana de α é dada por
x′1(t)x′2(t)
...
x′m(t)
3.1 Imersão 43
que possui posto 1. Assim existe i tal que x′i(t) 6= 0. Portanto, α′(t) 6= 0, ∀t ∈ J.
Reciprocamente, suponhamos que α′(t) 6= 0 , ∀t ∈ J. Assim, ∃ j tal que x′j(t) 6= 0;
j = 1, · · · ,m. Logo, a matriz jacobiana de α tem posto 1, que é máximo. Portanto, α é
uma imersão.
Assim α : J −→ Rm é uma imersão se, e somente se, é uma curva regular.
Exemplo 3.7 Seja α : R−→ R2 definida por α(t) = (t3− t, t2).O vetor velocidade é dado por: α′(t) = (3t2− 1,2t). Como α′(t) 6= 0 ∀t ∈ R então α é
uma imersão da reta no plano.
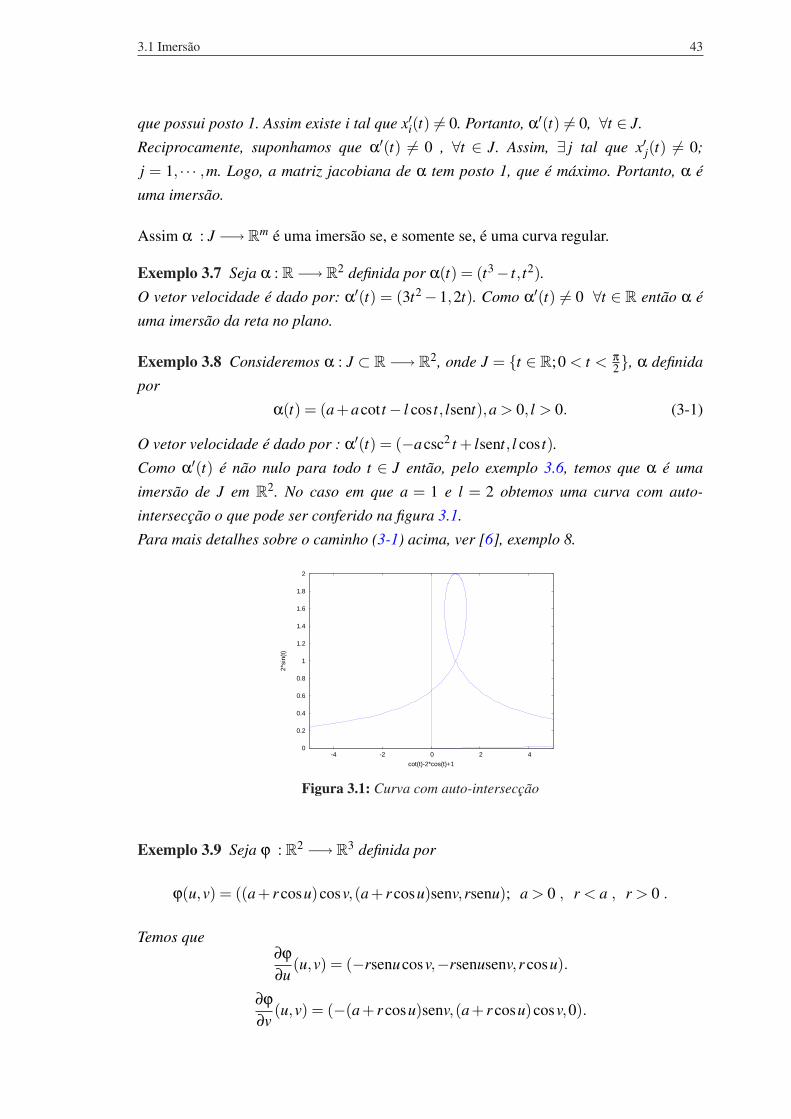
Exemplo 3.8 Consideremos α : J ⊂ R −→ R2, onde J = {t ∈ R;0 < t < π2}, α definida
por
α(t) = (a+acot t− l cos t, lsent),a > 0, l > 0. (3-1)
O vetor velocidade é dado por : α′(t) = (−acsc2 t + lsent, l cos t).Como α′(t) é não nulo para todo t ∈ J então, pelo exemplo 3.6, temos que α é uma
imersão de J em R2. No caso em que a = 1 e l = 2 obtemos uma curva com auto-
intersecção o que pode ser conferido na figura 3.1.
Para mais detalhes sobre o caminho (3-1) acima, ver [6], exemplo 8.
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
-4 -2 0 2 4
2*si
n(t)
cot(t)-2*cos(t)+1
Figura 3.1: Curva com auto-intersecção
Exemplo 3.9 Seja ϕ : R2 −→ R3 definida por
ϕ(u,v) = ((a+ r cosu)cosv,(a+ r cosu)senv,rsenu); a > 0 , r < a , r > 0 .
Temos que∂ϕ∂u
(u,v) = (−rsenucosv,−rsenusenv,r cosu).
∂ϕ∂v
(u,v) = (−(a+ r cosu)senv,(a+ r cosu)cosv,0).

3.1 Imersão 44
∂ϕ∂u
x∂ϕ∂v
= (−(a+ r cosu)r cosucosv,−(a+ r cosu)r cosusenv,−rsenu(a+ r cosu)).∣∣∣∣∂ϕ∂u
x∂ϕ∂v
∣∣∣∣ = r(a+ r cosu) 6= 0.
Portanto, a aplicação ϕ é uma imersão e esta, descreve um toro. Observe a figura 3.2.
Figura 3.2: Toro
No próximo resultado não apresentaremos uma demonstração rigorosa, para issoconferir em [5]. O que faremos será um comentário em linhas gerais.
Teorema 3.10 (Forma local das Imersões) Seja f : Rn −→ Rn+p continuamente dife-
renciável num aberto contendo a e suponha que f ′(a) :Rn −→Rn+p seja injetiva. Então,
existem abertos Z e V x W em Rn+p com f (a) ∈ Z, a ∈ V e 0 ∈W e um difeomorfismo
h : Z −→V xW tal que (h◦ f )(x) = (x,0).
Linhas Gerais:
Definimos a aplicação
F : Rn+p −→ Rn+p
(x,y) 7−→ F(x,y) = f (x)+(0,y),
onde (0,y) = (0, · · · ,0︸ ︷︷ ︸n vezes
,y1, · · · ,yp).
Assim F é dada por
F(x,y) = ( f1(x), f2(x), · · · , fn(x), fn+1(x)+ y1, · · · , fn+p(x)+ yp).

3.1 Imersão 45
A matriz jacobiana de F é
F ′(x,y) =
∂ f1∂x1
(x,y) · · · ∂ f1∂xn
(x,y) 0 0 · · · 0∂ f2∂x1
(x,y) · · · ∂ f2∂xn
(x,y) 0 0 · · · 0... . . . ...
...... . . . ...
∂ fn∂x1
(x,y) · · · ∂ fn∂xn
(x,y) 0 0 · · · 0∂ fn+1
∂x1(x,y) · · · ∂ fn+1
∂xn(x,y) 1 0 · · · 0
... . . . ... . . . ...∂ fn+p
∂x1(x,y) · · · ∂ fn+p
∂xn(x,y) 0 0 · · · 1
(n+p)×(n+p)
cujo determinante em (a,0) é dado por
detF ′(x,y) = det
∂ f1∂x1
(a,0) · · · ∂ f1∂xn
(a,0)... . . . ...
∂ fn∂x1
(a,0) · · · ∂ fn∂xn
(a,0)
6= 0 , pois f possui posto n.
Logo, pelo Teorema da Função Inversa (2.27), ∃ h : Z −→ V xW , inversa de F que édiferenciável. Observemos que F(x,0) = f (x) e que
(h◦F)(x,y) = (x,y)⇒ (h◦F)(x,0) = (x,0)⇒ h( f (x)) = (x,0)⇒ (h◦ f )(x) = (x,0).
A seguir exibiremos explicitamente o difeomorfismo h no caso do exemplo 3.5.Seja F : R3 −→ R3 definida por F(u,v,w) = (asenvcosu,asenvsenu,acosv+w)
F ′(u,v,w) =
−asenvsenu acosvcosu 0asenvcosu acosvsenu 0
0 −asenv 1
Segue que detF ′(u,v,w) 6= 0 em (π3 , π
4 ,0)∈V xW . Pelo Teorema da Função Inversa ∃ h talque F−1 = h : Z −→V xW que é diferenciável. Consideremos V = {(u,v) ∈ R2;0 < u <
π2 ,0 < v < π
2}, Z = {(x,y,z) ∈ R3 ; x 6= 0, 0 < arctan yx < π
2 , y > 0, 0 < arcsen√
x2+y2
a <π2 , x2 +y2 6= a2} e g(π
3 , π4 )∈ Z. Como h é diferenciável e h−1 = F também é diferenciável
então h é um difeomorfismo e h é dada por
h(x,y,z) = (arctanyx,arcsen
√x2 + y2
a,z−
√a2− x2− y2)
Temos que h◦g(u,v) = (u,v,0). Na figura 3.3 mostramos a imersão descrita acima.

3.2 Submersão 46
Figura 3.3: Imersão: exemplo3.5
3.2 Submersão
Definição 3.11 Uma aplicação diferenciável f : U −→Rm, definida num aberto U ⊂Rn,
chama-se uma submersão quando, para todo x ∈U, sua derivada f ′(x) : Rn −→ Rm é
uma transformação linear sobrejetiva.
Observemos que pelo Teorema do Núcleo e da Imagem temos que n≥ m.
Exemplo 3.12 Seja f a aplicação projeção dada por
f : Rp+m −→ Rm
(x,y) 7−→ f (x,y) = y
Como f é uma transformação linear, então f ′(z0) = f ∀z0 ∈Rp+m; assim I m( f ′) =Rm.
De modo que, f é uma submersão.
Uma função diferenciável f : U −→ R é uma submersão se, e somente sef ′(x) 6= 0 ou, equivalentemente, ∇ f (x) 6= 0, ∀ x ∈U .

3.2 Submersão 47
Exemplo 3.13 Seja f : Rp x Rm −→ R; dada por f (x,y) =12
(| x |2−| y |2
). Observe-
mos que ∇ f (x,y) = (x1,x2, · · · ,xp,−y1,−y2, · · · ,−ym) 6= 0, exceto na origem. Assim, f
restrita a Rp+m−{0} é uma submersão.
Uma submersão f : U −→Rm, definida num aberto U ⊂Rn, n≥m, tem posto m
em qualquer ponto. Por isso, uma submersão é chamada de aplicação de posto máximo.Reciprocamente, uma aplicação f : U −→ Rm, U ⊂ Rn n ≥ m de posto m é umasubmersão.
Exemplo 3.14 Seja g : R3 −→ R2 definida por g(x,y,z) = (x,y).
Jg(x,y,z) =
[1 0 00 1 0
]
Notemos que, ∀(x,y,z) ∈ R3 a matriz Jg(x,y,z) tem posto 2, logo, é uma submersão.
Teorema 3.15 (Forma local das Submersões) Seja f :Rp+m −→Rm continuamente di-
ferenciável num aberto contendo a e suponha que f ′(a) : Rp+m −→ Rm seja sobrejetiva.
Então, existem um aberto A ⊂ Rp+m, a ∈ A e um difeomorfismo h : A −→ Rp+m tal que
( f ◦h)(x,y) = y.
Novamente, não desejamos fazer uma demonstração rigorosa; esta pode serconferida em [5]. O que faremos aqui será um comentário em linhas gerais.
Linhas Gerais:
Definimos a aplicação
F : RpxRm −→ RpxRm
(x,y) 7−→ F(x,y) = (x, f (x,y))
cuja matriz jacobiana em a é dada por
F ′(a) =
1 0 · · · 0 0 · · · 00 1 · · · 0 0 · · · 0... . . . ...
... . . . ...0 0 · · · 1 0 · · · 0
∂ f1∂x1
(a) ∂ f1∂x2
(a) · · · ∂ f1∂xp
(a) ∂ f1∂y1
(a) · · · ∂ f1∂ym
(a)...
... . . . ...... . . . ...
∂ fm∂x1
(a) ∂ fm∂x2
(a) · · · ∂ fm∂xp
(a) ∂ fm∂y1
(a) · · · ∂ fm∂ym
(a)
(m+p)×(m+p)

3.3 Lema de Morse 48
Observemos que detF ′(a) = detM 6= 0 onde
M =
∂ f1∂y1
(a) · · · ∂ f1∂ym
(a)... . . . ...
∂ fm∂y1
(a) · · · ∂ fm∂ym
(a)
, pois f tem posto m.
Pelo Teorema da Função Inversa (2.27), existem Z e V xW vizinhanças de a para asquais a função F : V xW −→ Z, tem inversa diferenciável, h : Z −→ V xW dada porh(x,y) = (x,k(x,y)), onde k(x,y) = y é uma função diferenciável.Observemos que:
(π2 ◦F)(x,y) = π2(x, f (x,y)) = f (x,y)
Assim, ( f ◦h)(x,y) = (π2 ◦F)◦h(x,y) = π2 ◦ (F ◦h)(x,y) = π2(x,y) = y.
3.3 Lema de Morse
A seguir enunciaremos e demonstraremos um resultado conhecido como Lemade Morse para pontos críticos não degenerados, o qual pode ser aplicado no estudo docomportamento de uma função na vizinhança de um ponto crítico. Este é um exemplo noqual aplica-se o Teorema da Função Inversa e a Fórmula de Taylor.
Lema 3.16 (Lema de Morse) Sejam f : U ⊂ Rn −→ R de classe C k, k ≥ 3 e a ∈U um
ponto crítico não degenerado de f. Então existe um sistema de coordenadas de classe
C k−2
h : V −→ W ⊂U
y 7−→ x = h(y)
com 0 ∈V a ∈W, h(0) = a, tal que
( f ◦h)(y) = ( f ◦h)(0)+n
∑i, j=1
ai jyiy j,
onde ai j =12· ∂2 f
∂xi∂x j(a)
Demonstração. Sem perda de generalidade, podemos supor a = 0 e f (a) = 0. PelaFórmula de Taylor com resto integral (2-6), existe uma vizinhança W de a tal que
f (x) = f (0)+ f ′(0) · x+12!
f ′′(0) · x2 + · · ·+ 1p!
f (p)(0) · xp + rp(x)

3.3 Lema de Morse 49
onde rp =1p!
∫ 1
0(1− t) f (p+1)(0+ tx) · xp+1dt.
Logo, para p = 1 temos a expressão
f (x) = 0+ f ′(0) · x+ r1(x)
Pela igualdade (2-2) temos que
r1(x) =∫ 1
0(1− t) f ′′(tx)x2dt =
∫ 1
0(1− t)
n
∑i, j=1
∂2 f∂xi∂x j
(tx)xix jdt = ∑ai jxix j
onde ai j(x) =∫ 1
0(1− t)
∂2 f∂xi∂x j
(tx)dt, ai j é de classe C k−2, e pelo Teorema de Schwarz
a matriz A(x) =(ai j(x)
)nxn é simétrica em W . Assim
f (x) = r1(x) = ∑ai jxix j =< A(x) · x,x >; ∀x ∈W.
A matriz A0 é dada por
A0 = A(0) =(ai j(0)
)nxn =
12
(∂2 f
∂xi∂x j(0)
)
nxn, pois
ai j(0) =∫ 1
0(1− t)
∂2 f∂xi∂x j
(0)dt =∂2 f
∂xi∂x j(0)
∫ 1
0(1− t)dt =
12
∂2 f∂xi∂x j
(0).
Temos que A0 é inversível, pois 0 é um ponto crítico não degenerado de f .Definimos B(x) por A−1
0 A(x) = B2(x)⇒ A(x) = A0B2(x).
A0 = A0B2(0)⇒ B(0) = I.
Como A é simétrica segue que
A = A∗ = (A0B2)∗ = (B∗)2A0. (3-2)
Por outro lado, segue da equação (3-2) que
B2 = A−10 A = A−1
0 (B∗)2A0 = (A−10 B∗A0)2.
Se tomarmos W suficientemente pequeno, pelo exemplo 2.28 segue que
B = A−10 B∗A0 ⇒ A0B = B∗A0.

3.3 Lema de Morse 50
Sabemos que A = A0B2 = A0BB = (B∗A0)B. Assim se x ∈W , temos a expressão
f (x) =< A(x) · x,x >=< B∗(x)A0B(x)x,x >=< A0B(x)x,B(x)x > .
A aplicação ϕ : W −→ Rn, definida por ϕ(x) = B(x) · x é um difeomorfismo de classeC k−2, pois
ϕ′(x) · v =∂ϕ∂v
(x) =∂B∂v
(x) · x+B(x) · ∂x∂v
=∂B∂v
(x) · x+B(x) · v.
Portanto,ϕ′(0) · v = B(0) · v = v.
A transformação ϕ′(0) é a identidade, que é um isomorfismo; portanto, resulta doTeorema da Função Inversa que se tomarmos W suficientemente pequeno obteremos umdifeomorfismo de classe C k−2
ϕ : W −→ V
x 7−→ y = ϕ(x)com ϕ(0) = 0.
e f (x) =< A0ϕ(x),ϕ(x) >, ∀x ∈W . A inversa ϕ é dada por
ϕ−1 : V −→ W
y 7−→ ϕ−1(y) = x.
Seja h(y) = ϕ−1(y). Observamos que
( f ◦h)(y) =< A0ϕ(ϕ−1(y)),ϕ(ϕ−1(y)) >=< A0y,y >= ∑ai jyiy j,
o que completa a demonstração.¤
A seguir mostraremos alguns exemplos de funções para as quais aplicaremos oLema de Morse (3.16).
Exemplo 3.17 Seja f : R3 −→ R definida por
f (x1,x2,x3) = (x1−1)2 +(x2−2)2 + x23 +2.
Temos que (1,2,0) é ponto crítico de f . A matriz Hessiana H de f no ponto (1,2,0) é

3.3 Lema de Morse 51
dada por
2 0 00 2 00 0 2
Como o detH 6= 0, temos que (1,2,0) é um ponto crítico não degenerado. Fazendo a
mudança de coordenadas dada por
x1 − 1 = y1
x2 − 2 = y2
x3 = y3
ou seja
h : R3 −→ R3
(y1,y2,y3) 7−→ h(y1,y2,y3) = (y1 +1,y2 +2,y3)e h(0,0,0) = (1,2,0).
Observemos que
∑ai jyiy j =12
[y1 y2 y3
]
2 0 00 2 00 0 2
y1
y2
y3
= y2
1 + y22 + y2
3.
Portanto
( f ◦h)(y) = ( f ◦h)(0)+∑ai jyiy j
( f ◦h)(y) = 2+ y21 + y2
2 + y23
( f ◦h)(y)− f (1,2,0) = y21 + y2
2 + y23.
Corolário 3.18 Nas condições do lema de Morse, existe um sistema de coordenadas
ζ : V0 −→W, de classe C k−2, com a ∈W ⊂U, 0 ∈ V0, ζ(0) = a e f ζ(y)− f (a) =−y2
1−·· · − y2i + y2
i+1 + · · ·+ y2n.
Demonstração. [No caso n = 3]Sem perda de generalidade podemos supor f (a) = 0. Se a1 6= 0 e 4a1b1− d2
1 6= 0 peloLema de Morse existe h : V −→W tal que
g(x,y,z) = ( f ◦h)(x,y,z) = a1x2 +b1y2 + c1z2 +d1xy+ e1xz+ f1yz.

3.3 Lema de Morse 52
Faremos a seguinte mudança de coordenadas
x = u − d12a1
y
y = y
z = z
obtemos T1 : R3 −→ R3 dada por T1(u,y,z) = (u− d12a1
y,y,z); de onde concluímos que
g◦T1︸ ︷︷ ︸g1
(u,y,z) = a1u2 +By2 + c1z2 + e1uz+Fyz,
onde B =4a1b1−d2
14a1
e F =2a1 f1− e1d1
2a1. Faremos agora a seguinte mudança
u = u
y = v − F2Bz
z = z
obtemos T2 : R3 −→ R3 definida por T2(u,v,z) = (u,v− F2Bz,z); o que implica em
g1 ◦T2︸ ︷︷ ︸g2
(u,v,z) = a1u2 +Bv2 +Cz2 + e1uz
onde C =4Bc1−F2
4B.
Para eliminarmos o termo cruzado uz, faremos
u = w − e12a1
z
v = v
z = z
obtemos T3 : R3 −→ R3 dada por T3(w,v,z) = (w− e12a1
z,v,z).
g2 ◦T3︸ ︷︷ ︸g3
(w,v,z) = a1w2 +Dz2 +Bv2
onde D =4a1C− e2
14a1
. Fazendo
w = x1√a1
z = z1√D
v = y1√B

3.3 Lema de Morse 53
obtemos T4 :R3 −→R3 definida por T4(x1,y1,z1) = ( x1√a1
, y1√B, z1√
D). De onde concluímos,
finalmente a expressãog3 ◦T4︸ ︷︷ ︸
g4
(x1,y1,z1) = x21 + y2
1 + z21. (3-3)
Assim
g4(x1,y1,z1) = ((((g◦T1)◦T2)◦T3)◦T4)(x1,y1,z1) = g◦ (T1 ◦T2 ◦T3 ◦T4)(x1,y1,z1).
Consideramos ζ como sendo (T1 ◦T2 ◦T3 ◦T4); como (0,0,0) é um ponto críticode g e ζ(0,0,0) = (0,0,0) então por (3-3), concluímos que
g◦ζ(x1,y1,z1) = x21 + y2
1 + z21.
Agora, consideraremos o caso em que a1 = b1 = c1 = 0 e d1 6= 0, isto é
f (x,y,z) = d1xy+ e1xz+ f1yz.
Sendo (0,0,0) não degenerado temos que e1 f1 6= 0.Para eliminarmos os termos cruzados faremos a seguinte mudança de coorde-
nadas
x = u + v
y = u − v
z = z
obtendo T ′1 : R3 −→ R3 dada por T ′1(u,v,z) = (u+ v,u− v,z), e portanto
f ◦T ′1︸ ︷︷ ︸f1
(u,v,z) = d1u2−d1v2 +(e1 + f1)uz+(e1− f1)vz.
Para eliminarmos o termo cruzado uz, faremos
u = u1 − e1+ f12d1
z
v = v
z = z

3.3 Lema de Morse 54
obtemos T ′2 : R3 −→ R3 definida por T ′2(u1,v,z) = (u1− e1+ f12d1
z,v,z).
f1 ◦T ′2︸ ︷︷ ︸f2
(u1,v,z) = d1u21−
(e1 + f1)2
4d1z2−d1v2 +(e1− f1)vz.
Para eliminarmos vz faremos a seguinte mudança de coordenadas
u1 = u1
v = v1 + e1− f12d1
z
z = z
obtendo T ′3 : R3 −→ R3 dada por T ′3(u1,v1,z) = (u1,v1 + e1− f12d1
z,z).
f2 ◦T ′3︸ ︷︷ ︸f3
(u1,v1,z) = d1u21−d1v2
1−e1 f1
d1z2.
Fazendo
u1 = 1√d1
x1
v1 = 1√d1
y1
z =√
d1√e1 f1
z1
obtemos T ′4 : R3 −→ R3 definida por T ′4(x1,y1,z1) = ( 1√d1
x1,1√d1
y1,√
d1√e1 f1
z1).
f3 ◦T ′4(x1,y1,z1) =−y21− z2
1 + x21. (3-4)
Observemos que
f3 ◦T ′4(x1,y1,z1) = (((( f ◦T ′1)◦T ′2)◦T ′3)◦T ′4)(x1,y1,z1) = f ◦(T ′1 ◦T ′2 ◦T ′3 ◦T ′4)(x1,y1,z1).(3-5)
Chamaremos de ζ a composição (T ′1 ◦T ′2 ◦T ′3 ◦T ′4) e como ζ(0,0,0) = (0,0,0),onde (0,0,0) é ponto crítico de f pela equação 3-4 temos
f ◦ζ(x1,y1,z1) =−y21− z2
1 + x21.
¤

3.3 Lema de Morse 55
O número i que aparece no corolário (3.18) chama-se o índice do ponto críticoa. Quando i = n, o ponto a é um máximo local para f ; se i = 0, a é um ponto de mínimolocal. Para 0 < i < n, tem-se um ponto de sela de índice i. No exemplo 3.17, temos que oíndice do ponto crítico (1,2,0) é zero, logo (1,2,0) é ponto de máximo local.
A seguir apresentaremos outro exemplo onde aplicaremos o índice de Morse.
Exemplo 3.19 Seja f : R3 −→ R dada por
f (x,y,z) = 2x2 +4y2 +4xy+ yz.
Temos que (0,0,0) é ponto crítico não degenerado de f . Fazendo
x = u − y
y = y
z = z
obtemos uma transformação linear T1 : R3 −→ R3 definida por T (u,y,z) = (u− y,y,z).Assim
f ◦T1(u,y,z) = 2u2 +2y2 + yz. (3-6)
Agora, faremos em 3-6 a seguinte mudança
y = v − 14z
u = u
z = z
obtendo uma transformação linear T2 :R3 −→R3 definida por T2(u,v,z) = (u,v− 14z,z).
Assim
(( f ◦T1)◦T2)(u,v,z) = 2u2 +2v2− 18
z2. (3-7)
Para finalizar faremos em 3-7 a mudança
u = 1√2x1
v = 1√2y1
z = 2√
2z1
obtendo uma transformação T3 : R3 −→ R3 dada por T3(x1,y1,z1) =( 1√
2x1,
1√2y1,2
√2z1). Assim
((( f ◦T1)◦T2)◦T3)(x1,y1,z1) = x21 + y2
1− z21. (3-8)

3.3 Lema de Morse 56
Observemos que ((( f ◦ T1) ◦ T2) ◦ T3)(x1,y1,z1) = f ◦ (T1 ◦ T2 ◦ T3)(x1,y1,z1).Chamaremos de ζ a composição de transformações e como ζ(0,0,0) = (0,0,0) temos
f ◦ζ(x1,y1,z1) =−z21 + x2
1 + y21.
O índice de Morse do ponto (0,0,0) é i = 1, logo (0,0,0) é um
ponto de sela. Explicitamente, ζ : R3 −→ R3 é definida como ζ(x1,y1,z1) =(√2
2(x1− y1 + z1),
√2
2(y1− z1), 2
√2z1
).
Exemplo 3.20 Seja g : R2 −→ R definida por g(x,y) = 4x2 + y2 − 4xy. Sua matriz
Hessiana é dada por [8 −4
−4 2
]
Observemos que o determinante desta matriz é nulo. Logo, temos um pontocrítico degenerado.
Para eliminarmos o termo xy faremos a seguinte mudança
{x = u + 1
2y
y = y
obtemos T : R2 −→ R2 dada por T (u,y) = (u+ 12y,y).
g◦T (u,y) = 4u2.
Fazendo {u = 1
2u1
y = y
obtemos T ′ : R2 −→ R2 definida por T (u1,y) = (12u1,y)
(g◦T )◦T ′(u1,y) = u21.
Observemos que mesmo sendo um ponto crítico degenerado é possível escrever
g nos moldes do Lema de Morse (3.16). Este é um exemplo de que a recíproca do Lema
de Morse(3.16) não é válida. O gráfico de g é mostrado na figura 3.4.

3.3 Lema de Morse 57
Figura 3.4: Ponto crítico degenerado
Exemplo 3.21 Seja f : R2 −→ R definida por f (x,y) = xy(2−3x−4y).Os pontos críticos de f são: (0,0), (0, 1
2), (23 ,0) e (2
9 , 16). Como todos são pontos críticos
não degenerados podemos aplicar o Lema de Morse (3.16) para cada um dos pontos
críticos. Temos que todos são pontos de sela, menos o ponto (29 , 1
6) que é ponto de máximo
local. O gráfico de f pode ser observado na figura 3.5.
Figura 3.5: Pontos críticos não degenerados

3.3 Lema de Morse 58
Ao tentarmos exibir explicitamente a aplicação ζ dada no corolário encontramossérias dificuldades. Este exemplo mostra que nem sempre é possível exibir uma transfor-mação ζ : V0 −→W dada por
( f ◦ζ)(y) =−y21−·· ·− y2
i + y2i+1 + · · ·+ y2
n
embora sabemos de sua existência via Lema de Morse.

Referências Bibliográficas
[1] A.N.KOLMOGOROV; FOMIN, S. Elementos da Teoria das Funções e de AnáliseFuncional. Editora Mir. Moscou, 1982.
[2] HÖNIG, C. S. Aplicações da Topologia à Análise. p.180-181.
[3] LIMA, E. L. Álgebra Linear. IMPA, Rio de Janeiro, 2006.
[4] LIMA, E. L. Análise Real, v.2. IMPA, Rio de Janeiro, 2007.
[5] LIMA, E. L. Curso de Análise, v.2. IMPA, Rio de Janeiro, 2008.
[6] MELO, M. M. Alguns Exemplos de Curvas Planas. Revista da Olímpiada, IME -
UFG, no5,p.54-66, 2004.
[7] SPIVAK, M. O Cálculo em Variedades. Ed. Ciência Moderna LTDA, Rio de Janeiro,
2003.
[8] TENENBLAT, K. Introdução à Geometria Diferencial. Editora Edgard Blucher, São
Paulo, 2008.