unit root tests - 國立中興大學web.nchu.edu.tw/~finmyc/tim_unit_p.pdfroots on the unit circle,...
TRANSCRIPT

Unit Root Tests
Mei-Yuan Chen
Department of Finance
National Chung Hsing University
February 25, 2013
M.-Y. Chen I(0) vs I(1)

Unit Root Tests
An ARMA(p,q) (autoregressive of order p and moving average
of order q) model of yt is typically written as
Φ(B)yt = Ψ(B)ǫt, where
Φ(B) = 1− φ1B − φ2B2 − · · · − φpB
p,
Ψ(B) = 1− ψ1B − ψ2B2 − · · · − ψqB
q,
are polynomials in B, the back-shift operator, and {ǫt} is
white-noise.
M.-Y. Chen I(0) vs I(1)

Stationarity
An ARMA model is said to be “stationary” if all the roots of
Φ(z) = 0 are outside the unit circle, |z| = 1. In this case, we
can obtain a stationary solution yt = Φ(B)−1Ψ(B)ǫt.
M.-Y. Chen I(0) vs I(1)

Invertibility
An ARMA model is said to be “invertible” if all the roots of
Ψ(z) = 0 are outside the unit circle. In this case, we can write
ǫt = Ψ(B)−1Φ(B)yt. For example, if yt = αyt−1 + ǫt, then
{yt} is stationary provided that the root of Φ(z) = 1−αz = 0,
z = 1/α, is outside the unit circle, i.e., |α| < 1.
M.-Y. Chen I(0) vs I(1)

ARIMA Models
An ARIMA(p,d,q) model of yt is Φ(B)(l − B)dyt = Ψ(B)ǫt,
where Φ(B) and Ψ(B) satisfy the stationarity and invertibility
conditions. As the polynomial A(z) ≡ Φ(z)(1 − z)d = 0 has d
roots on the unit circle, {yt} is said to be an I(d) process
(integrated process of order d). That is, an I(d) process must
be differenced d times to achieve stationarity; in particular, an
I(0) process is stationary.
M.-Y. Chen I(0) vs I(1)

Of particular interest to us are I(1) processes of the following
form: (1−B)yt = ut, where ut has a stationary and invertible
ARMA representation. To see the properties of an I(1)
process, consider a special case where {yt} is a “random
walk”, i.e., the innovations ut are i.i.d. with mean zero and
finite variance σ2u. That is,
yt = yt−1 + ut, ut ∼ i.i.d.(0, σ2u).
M.-Y. Chen I(0) vs I(1)

Properties of a Random Walk
1. the effects of past ut on yt are permanent;
2. yt has unbounded variance tσ2u;
3. yt has a smooth sample path (in terms of level crossing)
which typically wanders away and rarely crosses its mean
level. By contrast, an I(0) process has short memory,
bounded variance, and a ragged sample path which
crosses its mean level very often.
M.-Y. Chen I(0) vs I(1)

Clearly, an I(1) process is non-stationary, but a non-stationary
series need not be I(1). If (1− B)yt has a non-zero mean µ0
such that (1−B)yt = µ0 + ut, then {yt} is said to be an I(1)
process with the drift µ0(since yt = µ0t +∑t
i=0 ut−i. A major
problem in time-series regressions of an I(1) variable is that
many known results are no longer valid.
M.-Y. Chen I(0) vs I(1)

I(1) without Drift
Consider the DGP (data generating process):
yt = α0yt−1 + ut,
where ut is an I(0) process. We want to test the null
hypothesis of a unit root (α0 = 1) against the alternative
hypothesis that yt is I(0) (|α0| < 1).
M.-Y. Chen I(0) vs I(1)

Dickey-Fuller Tests
Suppose that we estimate one of the following three models.
yt = α1Tyt−1 + ut, (1)
yt = µ2T + α2Tyt−1 + ut, (2)
yt = µ3T + β3T
(
t− T
2
)
+ α3Tyt−1 + ut, (3)
where ut is a generic notation for OLS residual.
M.-Y. Chen I(0) vs I(1)

If ut is i.i.d. N(0, σ2u), Dickey & Fuller (1979) show that under
the null hypothesis T (αiT − 1) and the t-statistics
ταiT= (αiT − 1)/[s.e.(αiT )], i = 1, 2, 3,
τµiT= µiT/[s.e.(µiT )], i = 2, 3,
τβ3T= β3T /[s.e.(β3T )],
have non-normal limiting distributions, where s.e. stands for
the OLS standard errors.
M.-Y. Chen I(0) vs I(1)

The empirical distributions of T (αiT − 1) and ταiT, i = 1, 2, 3
are tabulated in Fuller (1976, p. 371 & p. 373); the
distributions of the t-ratios τµiT, i = 2, 3 and τβ3T
are
tabulated in Dickey & Fuller (1981). From the table for
T (α1T − 1) it can be seen that this distribution is skewed to
the left and α1T is downward biased.
M.-Y. Chen I(0) vs I(1)

Table Finite-sample and asymptotic critical values of the
Dickey-Fuller test.
Sample Significance Level
Size 1% 2.5% 5% 10%
25 −3.75 −3.33 −3.00 −2.63
50 −3.58 −3.22 −2.93 −2.60
100 −3.51 −3.17 −2.89 −2.58
250 −3.46 −3.14 −2.88 −2.57
∞ −3.43 −3.12 −2.86 −2.57
M.-Y. Chen I(0) vs I(1)
The distributions of T (αiT − α0) when α0 = −1 are just the
mirror images of those for α0 = 1, in the sense that
P{αiT − α0 > c|α0 = 1} = P{αiT − α0 < −c|α0 = −1}.
Homework! Simulate and plot the empirical distributions of
αiT under the DGPs (data generating process) with α0 = 1
and α0 = −1 for T = 100 and replications 2000.
M.-Y. Chen I(0) vs I(1)
Augmented Dickey-Fuller TestsMore generally, suppose that ut has an ARMA(p, q)
representation: Φ(B)ut = Ψ(B)ǫt, where ǫt are i.i.d. N(0, σ2).
First consider the case that p = q = 1. Then
ut − φ1ut−1 = ǫt − ψ1ǫt−1, and
ǫt
= ut − φ1ut−1 + ψ1ǫt−1
= (ut − φ1ut−1) + ψ1(ut−1 − φ1ut−2 + ψ1ǫt−2)
= (ut − φ1ut−1) + ψ1(ut−1 − φ1ut−2) + ψ21(ut−2 − φ1ut−3 + ψ1ǫt−3)
=...
=
∞∑
j=0
ψj1(ut−j − φ1ut−1−j).
M.-Y. Chen I(0) vs I(1)
We have, since ǫt−1 =∑
∞
j=1 ψj−11 (ut−j − φ1ut−1−j),
yt − yt−1
= (α0yt−1 + ut)− yt−1
= (α0 − 1)yt−1 + φ1ut−1 − ψ1ǫt−1 + ǫt
= (α0 − 1)yt−1 + φ1ut−1 − ψ1
∞∑
j=1
ψj−11 (ut−j − φ1ut−1−j) + ǫt
= (α0 − 1)yt−1 + (φ1 − ψ1)[ut−1 + ψ1ut−2 + ψ21ut−3 + · · · ] + ǫt.
M.-Y. Chen I(0) vs I(1)

This suggests a regression of ∆yt on yt−1 and ∆yt−1, ∆yt−2,
. . . , which can be approximated using an autoregression of
finite order k:
∆yt ≈ (α0 − 1)yt−1 +
(φ1 − π1)[∆yt−1 + ψ1∆yt−2 + ψ21∆yt−3 + · · ·
+ψk−11 ∆yt−k] + ǫt
=: θ0yt−1 + θ1∆yt−1 + θ2∆yt−2 + · · ·+ θk∆yt−k + ǫt.
M.-Y. Chen I(0) vs I(1)

To obtain consistent estimates, the order of autoregression, k,
must be a function of T ; in particular, Said & Dickey (1984)
show that k must be o(T 1/3) and that there exist c > 0 and
r > 0 such that ck > T 1/r.
M.-Y. Chen I(0) vs I(1)

On the other hand, the t-statistic for θ0T has the same limiting
distribution as that of τα1T; hence the table in Fuller (1976)
can be used. If a constant term is included in the model, the
resulting t-statistic has the same limiting distribution as that
of τα2T. The same idea carries over if ut follows an
ARMA(p, q) model. Tests of this type are known as the
Augmented Dickey-Fuller (ADF) tests.
M.-Y. Chen I(0) vs I(1)

Phillips-Perron Tests
More general results are available when ut are weakly
dependent. Let
σ2 := limT→∞
1
TE
[
(
T∑
t=1
ut
)2]
, σ2u := lim
T→∞
1
T
T∑
t=1
E(ut)2.
M.-Y. Chen I(0) vs I(1)

Define YT in D[0, 1] as
YT (r) =1
σ√T
[Tr]∑
t=1
ut,
where [Tr] denotes the integer part of Tr. We assume
suitable conditions under which the FCLT holds, i.e.,
YT ⇒W , where W is a standard Wiener process. More
specific conditions can be found in, e.g., Phillips (1987) and
Wooldridge & White (1988).
M.-Y. Chen I(0) vs I(1)

The results below are fundamental for Phillips (1987) and
many other papers written by Phillips and his co-authors.
Without loss of generality we set y0 = 0. Let
W ∗ = W −∫ 1
0W (r) dr. If yt =
∑ti=1 ui,
(1) T−3/2∑T
t=1 yt−1 ⇒ σ
∫ 1
0
W (r) dr;
(2) T−2∑T
t=1 y2t−1 ⇒ σ2
∫ 1
0
W (r)2 dr;
M.-Y. Chen I(0) vs I(1)

(3) T−1∑T
t=1 yt−1ut ⇒
σ2
∫ 1
0
W (r) dW (r) +1
2(σ2 − σ2
u) =1
2(σ2W (1)2 − σ2
u);
(4) T−3/2∑T
t=1 tut ⇒
σ
∫ 1
0
r dW (r) = σ
(
W (1)−∫ 1
0
W (r) dr
)
;
(5) T−5/2∑T
t=1 tyt−1 ⇒ σ
∫ 1
0
rW (r) dr;
(6) T−2∑T
t=1(yt−1 − y−1)
2 ⇒ σ2
∫ 1
0
W ∗(r)2 dr;
(7) T−1∑T
t=1(yt−1 − y−1)ut ⇒
σ2
∫ 1
0
W ∗(r) dW (r) +1
2(σ2 − σ2
u) .
M.-Y. Chen I(0) vs I(1)

Under the null hypothesis that yt = yt−1 = ut, where {ut}satisfies the FCLT, then
(a) For model (1),
T (α1T − 1) ⇒12
(
W (1)2 − σ2u/σ
2)
∫ 1
0W (r)2 dr
;
τα1T⇒
σ2σu
(
W (1)2 − σ2u/σ
2)
(
∫ 1
0W (r)2 dr
)1/2.
M.-Y. Chen I(0) vs I(1)

(b) Let λ = 12(σ2 − σ2
u) and λ∗ = λ/σ2. For model (2),
T (α2T − 1) ⇒∫ 1
0W ∗(r) dW (r) + λ∗∫ 1
0W ∗(r)2 dr
;
and
M.-Y. Chen I(0) vs I(1)
τα2T⇒
σσu
(
∫ 1
0W ∗(r) dW (r) + λ∗
)
(
∫ 1
0W ∗(r)2 dr
)1/2;
τµ2T⇒
σσu
[(
∫ 1
0 W (r)2 dr)
W (1)−(
∫ 1
0 W (r) dr) (
∫ 1
0 W (r) dW (r) + λ∗)]
(
∫ 1
0 W∗(r)2 dr
)1/2 (∫ 1
0 W (r)2 dr)1/2
ϕ1 ⇒ σ2
2σ2u
(
∫ 1
0W ∗(r) dW (r) + λ∗
)2
∫ 1
0W ∗(r)2 dr
+W (1)2
.
M.-Y. Chen I(0) vs I(1)

Remarks
(1) For model (3), the limits of T (α3T − 1), τµ3T, τβ3T
, and
τα3Tcan be found in Phillips & Perron (1988), and the
limits of φ2 and φ3 can be found in Perron (1990).
(2) The OLS estimators αiT , i = 1, 2, 3, are all ”supper
consistent” in the sense that αiT − 1 is Op(T−1), whereas
in the standard case such that |α0| < 1, αiT − α0 is
Op(T−1/2). Moreover, the OLS estimators remain
consistent even when yt−1 and serially correlated
disturbances are both present because the sample
variation∑T
t=1 y2t−1 grows much faster than the
regressor-error correlation∑T
t=1 yt−1ut.
M.-Y. Chen I(0) vs I(1)

Note that under the null hypothesis, the estimators σ2T = T−1
∑Tt=1 u
2t
and T−1∑T
t=1(yt − yt−1)2 are consistent for σ2
u by suitable law of large
numbers. Also observe that σ2 is the limit of
1
TE
[
(
T∑
t=1
ut
)2]
=1
T
(
T∑
t=1
E(u2t ) + 2T−1∑
τ=1
T∑
t=τ+1
E(utut−τ )
)
,
which can be consistently estimated using the following (non-parametric)
estimator
s2T,n(T ) =1
T
T∑
t=1
u2t + 2
n(T )∑
τ=1
wτn
T∑
t=τ+1
utut−τ
,
where w(·) is some kernel.
M.-Y. Chen I(0) vs I(1)

Note that n(T ) characterizes kernel’s bandwidth which should be
growing with T but at a slower rate; especially, n(T ) can be o(T 1/2). If
we use the so-called Bartlett kernel:
wτn =
{
1− τ/(n(T ) + 1), if 0 ≤ τ/n(T ) ≤ 1,
0, otherwise,
we obtain the Newey & West (1987) estimator; if we use the so-called
Parzen kernel:
wτn =
1− 6[τ/n(T )]2 + 6[τ/n(T )]3, if 0 ≤ τ/n(T ) ≤ 1/2,
2[1− τ/n(T )]3, if1/2 ≤ τ/n(T ) ≤ 1,
0, otherwise,
we obtain the Gallant (1987) estimator.
M.-Y. Chen I(0) vs I(1)

Limiting Distributions of D-F Tests
If ut are i.i.d. with mean zero and variance σ2, then σ2u = σ2
and λ = λ∗ = 0. Under the null hypothesis that
yt = yt−1 + ut, where {ut} satisfies the FCLT, then:
(a) For model (1),
T (α1T − 1) ⇒12
(
W (1)2 − 1)
∫ 1
0W (r)2 dr
;
τα1T⇒
12
(
W (1)2 − 1)
(
∫ 1
0W (r)2 dr
)1/2.
M.-Y. Chen I(0) vs I(1)

(b) for model (2),
T (α2T − 1) ⇒∫ 1
0W ∗(r) dW (r)∫ 1
0W ∗(r)2 dr
;
τα2T⇒
(
∫ 1
0W ∗(r) dW (r)
)
(
∫ 1
0W ∗(r)2 dr
)1/2;
τµ2T⇒
(
∫ 1
0 W (r)2 dr)
W (1)−(
∫ 1
0 W (r) dr) (
∫ 1
0 W (r) dW (r))
(
∫ 1
0W ∗(r)2 dr
)1/2 (∫ 1
0W (r)2 dr
)1/2
ϕ1 ⇒ 1
2
(
∫ 1
0W ∗(r) dW (r)
)2
∫ 1
0W ∗(r)2 dr
+W (1)2
.
M.-Y. Chen I(0) vs I(1)

PP Z-Test
As the limits of the DF tests depend on nuisance parameters
when ut are weakly dependent, critical values cannot be
tabulated. Fortunately, the nuisance parameters can be
eliminated even when ut are not i.i.d.
M.-Y. Chen I(0) vs I(1)

Consider
Z(α1T ) = T (α1T − 1) −12 (s
2Tn − σ2
T )
T−2∑T
t=1 y2t−1
⇒12 (W (1)2 − σ2
u/σ2)
∫ 1
0 W (r)2 dr−
12 (σ
2 − σ2u)
σ2∫ 1
0 W (r)2 dr
=12 (W (1)2 − 1)∫ 1
0W (r)2 dr
,
which is the same as the limit of T (α1T − 1). Therefore, the table in
Fuller (1976) can be directly used for this test. A modified
Z ′α = Z(α1T )/
√2 is related to the empirical tables in Evans &
Savin (1981).
M.-Y. Chen I(0) vs I(1)

Similarly,
Z(τα1T) =
σTsTn
τα1T−
12 (s
2Tn − σ2
T )
sTn
(
T−2∑T
t=1 y2t−1
)1/2
⇒12 (W (1)2 − σ2
u/σ2)
(
∫ 1
0 W (r)2 dr)1/2
−12 (σ
2 − σ2u)
σ2(
∫ 1
0 W (r)2 dr)1/2
=12 (W (1)2 − 1)
(
∫ 1
0W (r)2 dr
)1/2.
M.-Y. Chen I(0) vs I(1)

Dickey-Fuller Tests with GLS Detrending Data
ERS (1996) propose a simple modification of the ADF tests inwhich the data are detrended so that explanatory variables are”taken out” of the data prior to running the test regression.ERS define a quasi-difference of that depends on the valuerepresenting the specific point alternative against which wewish to test the null:
d(yt|a) ={
yt if t = 1,
yt − ayt−1 if t < 1,, d(xt|a) =
{
xt if t = 1,
xt − ayt−1 if t < 1,
M.-Y. Chen I(0) vs I(1)
Next, consider an OLS regression of the quasi-differenced data
d(yt|a) on the quasi-differenced d(xt|a):
d(yt|a) = d(xt|a)′δ(a) + ut
where xt contains either a constant, or a constant and trend,
and let δ(a) be the OLS estimates from this regression.
M.-Y. Chen I(0) vs I(1)

Now, all that we need know is a value for a. ERS recommend
the use of a, where:
a =
{
1− 7T
ifxt = 1,
1− 13.5T
ifxt = (1, t)′.
Then, define the GLS detrended data, ydt using the estimates
associated with the a:
ydt = yt − x′tδ(a).
M.-Y. Chen I(0) vs I(1)
Then the DFGLS test involves estimating the standard ADF
test equation after substituting the GLS detrended ydt for the
original yt:
△ydt = αydt−1 +
p∑
j=1
βj△ydt−j + vt.
Note that since the ydt are detrended, we do not include the xtin the DFGLS test equation. As with the ADF test, we
consider the t-ratio for α from this test equation.
While the DFGLS -ratio follows a Dickey-Fuller distribution in
the constant only case, the asymptotic distribution differs
when you include both a constant and trend. ERS (1996,
Table 1, p. 825) simulate the critical values of the test
statistic in this latter setting for T = {50, 100, 200, . . . ,∞}.M.-Y. Chen I(0) vs I(1)

Homework! Simulate the empirical sizes and powers of ADF
and DFGLS tests under the DGP: yt = 0.1 + α0yt−1 + ut with
α0 = 1 and α0 = 0.8. The sample size and replications are
considered as T = 100 and 2000.
M.-Y. Chen I(0) vs I(1)

Unit Root Tests in gretl
The unit root tests of ADF and ADF-GLS are provided in
gretl. These two tests are accessed via 「Variable (V)」 in tool
bar of gretl.
M.-Y. Chen I(0) vs I(1)

Unit Root Tests in R
The following packages in R provide unit root tests:
1. urca; see twi−unit.R
2. tseries
3. fUnitRoots
In urca, the unit root tests can be implemented by using
urTest(x, method = c(”unitroot”, ”adf”, ”urers”, ”urkpss”, ”urpp”,
”ursp”, ”urza”), title = NULL, description = NULL, ...)
M.-Y. Chen I(0) vs I(1)

Unit Root Tests in urca
1. ur.df: Augmented-Dickey-Fuller Unit Root Test
ur.df(y, type = c(”none”, ”drift”, ”trend”), lags = 1, selectlags =
c(”Fixed”, ”AIC”, ”BIC”))
2. ur.ers: Elliott, Rothenberg & Stock Unit Root Test
ur.ers(y, type = c(”DF-GLS”, ”P-test”), model = c(”constant”,
”trend”), lag.max = 4)
3. ur.kpss: Kwiatkowski et al. Unit Root Test
ur.kpss(y, type = c(”mu”, ”tau”), lags = c(”short”, ”long”, ”nil”),
use.lag = NULL)
4. ur.pp: Phillips & Perron Unit Root Test
ur.pp(x, type = c(”Z-alpha”, ”Z-tau”), model = c(”constant”,
”trend”), lags = c(”short”, ”long”), use.lag = NULL)
M.-Y. Chen I(0) vs I(1)
Unit Root Tests in urca: continue
5. ur.sp: Schmidt & Phillips Unit Root Test
ur.sp(y, type = c(”tau”, ”rho”), pol.deg = c(1, 2, 3, 4), signif =
c(0.01, 0.05, 0.1))
6. ur.za: Zivot & Andrews Unit Root Test
ur.za(y, model = c(”intercept”, ”trend”, ”both”), lag=NULL)
M.-Y. Chen I(0) vs I(1)
Unit Root Tests in tseries
1. adf.test: Augmented Dickey-Fuller Test
adf.test(x, alternative = c(”stationary”, ”explosive”), k =
trunc((length(x)− 1)(1/3)))
2. kpss.test: KPSS Test for Stationarity
kpss.test(x, null = c(”Level”, ”Trend”), lshort = TRUE)
3. pp.test: Phillips-Perron Unit Root Test
pp.test(x, alternative = c(”stationary”, ”explosive”), type =
c(”Z(α)”, ”Z(tα)”), lshort = TRUE)
M.-Y. Chen I(0) vs I(1)
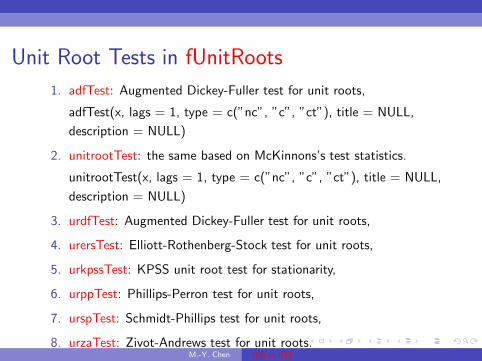
Unit Root Tests in fUnitRoots
1. adfTest: Augmented Dickey-Fuller test for unit roots,
adfTest(x, lags = 1, type = c(”nc”, ”c”, ”ct”), title = NULL,
description = NULL)
2. unitrootTest: the same based on McKinnons’s test statistics.
unitrootTest(x, lags = 1, type = c(”nc”, ”c”, ”ct”), title = NULL,
description = NULL)
3. urdfTest: Augmented Dickey-Fuller test for unit roots,
4. urersTest: Elliott-Rothenberg-Stock test for unit roots,
5. urkpssTest: KPSS unit root test for stationarity,
6. urppTest: Phillips-Perron test for unit roots,
7. urspTest: Schmidt-Phillips test for unit roots,
8. urzaTest: Zivot-Andrews test for unit roots.M.-Y. Chen I(0) vs I(1)

Testing Stationarity Against a Unit Root
We have learned that the DF tests usually have low power
against trend stationarity. To complement the aforementioned
unit-root tests, it is quite natural to consider tests from an
opposite direction, i.e., tests of the null hypothesis of (trend)
stationarity against a unit root.
M.-Y. Chen I(0) vs I(1)

KPSS Tests
Consider a linear regression model
yt = xtat + z′tb0 + ǫt, t = 1, · · · , T,
where at = at−1 + vt with the initial value a0, and vt are i.i.d.
N(0, σ2v) independent of ǫt which are also i.i.d. N(0, σ2
ǫ ).
Under the null that at = a0, σ2v = 0. Under the alternative of
random walk,
yt = xta0 + z′tb0 + xt
t∑
j=1
vj + ǫt, t = 1, · · · , T.
M.-Y. Chen I(0) vs I(1)

Nabeya & Tanaka (1988) derive the locally best invariant test
for σ2v = 0, which is based on the ratio of two quadratic forms:
e′DxATDxe
e′e,
where Dx = diag(x1, . . . , xT ), AT is such that its (s, t)th
element is min(s, t), and e is the residual vector from
regressing yt on xt and zt.
M.-Y. Chen I(0) vs I(1)

Kwiatkowski, Phillips, Schmidt, & Shin (1992) apply this test
to test for the null of (trend) stationarity. Consider the DGP:
yt = a0 + b0t+ ǫt,
which is a special case of the null model of Nabeya &
Tanaka (1988) with xt = 1 and zt = t; when b0 = 0, this is
just a level-stationary model. Under the alternative that yt is
an I(1) process with drift,
yt = a0 + b0t + y∗t ,
where y∗t =∑t
j=1 vj .
M.-Y. Chen I(0) vs I(1)

Note that AT can be written as C ′
TCT , where CT is an upper
triangular matrix with all elements on and above the main
diagonal being 1. In this case, Dx = IT so that
e′DxATDxe = e′C ′
TCT e, and it can be verified that CT e is a
vector containing reversed partial sums of et, i.e., the t-th
element is Rt =∑T
i=t ei. Let St denote partial sums of et.
Then, R1 = ST = 0 and St = −Rt+1 for t = 1, . . . , T − 1.
M.-Y. Chen I(0) vs I(1)

Nabeya and Tanaka’s statistics can be written as:
ηi =T−2
∑Tt=1R
2t
σ2T
=T−2
∑Tt=1 S
2t
σ2T
, i = 1, 2,
with σ2T = e′e/T , where e is obtained from regressing yt on
the constant 1 for the null of level stationarity (i = 1) and
from regressing yt on 1 and t for the null of trend stationarity
(i = 2).
M.-Y. Chen I(0) vs I(1)

To allow for weakly dependent and heterogeneous ǫt, the
statistics become
ηi =T−2
∑Tt=1 S
2t
s2Tn
, i = 1, 2,
where s2Tn is the Newey-West or Gallant estimator of
σ2 = limT T−1 IE(S2
T ); these two tests will be referred to as
the KPSS tests.
M.-Y. Chen I(0) vs I(1)

Theorem: KPSS
In the level-stationary model,
η1 ⇒∫ 1
0
W 0(r)2 dr,
where W 0 is a Brownian bridge; in the trend-stationary model,
η2 ⇒∫ 1
0
V (r)2 dr;
where
V (r) = W (r) + (2r − 3r2)W (1)− (6r − 6r2)∫ 1
0W (s) ds.
M.-Y. Chen I(0) vs I(1)

These tests suffer similar problems as the PP test. When ǫtare highly correlated, the empirical sizes are too high if the
truncation lag n for s2Tn is too small, say, 4. A large truncation
lag, however, has an adverse effect on the power of test.
M.-Y. Chen I(0) vs I(1)

Table 2: Asymptotic critical values of the KPSS tests.
Statistic 1% 2.5% 5% 10%
η1 0.739 0.574 0.463 0.347
η2 0.216 0.176 0.146 0.119
M.-Y. Chen I(0) vs I(1)
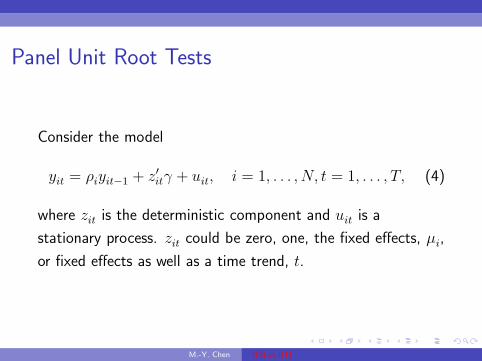
Panel Unit Root Tests
Consider the model
yit = ρiyit−1 + z′itγ + uit, i = 1, . . . , N, t = 1, . . . , T, (4)
where zit is the deterministic component and uit is a
stationary process. zit could be zero, one, the fixed effects, µi,
or fixed effects as well as a time trend, t.
M.-Y. Chen I(0) vs I(1)

Levin and Lin (1992), Levin, Lin, and Chu (2002)Levin and Lin (LL) tests assume that ρi = ρ for all i and are
interesting in testing
H0 : ρ = 1 v.s. Ha : ρ < 1.
Denote ρ as the OLS estimator of ρ in (4), Levin andLin (2002) show that
√NT (ρ− 1) =
1√N
∑Ni=1
1T
∑Tt=1 yi,t−1uit
1N
∑Ni=1
1T 2
∑Tt=1 y
2i,t−1
tρ =(ρ− 1)
√
∑Ni=1
∑Tt=1 y
2i,t−1
se,
s2e =1
TN
N∑
i=1
T∑
t=1
u2it.
M.-Y. Chen I(0) vs I(1)

As T → ∞ and then N → ∞,zit ρ
0√NT (ρ− 1) ⇒ N(0, 2)
1√NT (ρ− 1) ⇒ N(0, 2)
µi
√NT (ρ− 1) + 3
√N ⇒ N(0, 51/5)
(µi, t)√N(T (ρ− 1) + 7.5) ⇒ N(0, 2895/112)
M.-Y. Chen I(0) vs I(1)

As T → ∞ and then N → ∞,zit tρ
0 tρ ⇒ N(0, 1)
1 tρ ⇒ N(0, 1)
µi
√1.25tρ +
√1.875N ⇒ N(0, 1)
(µi, t)√
448/277(tρ +√3.75N) ⇒ N(0, 1)
In case uit is stationary, the asymptotic distributions of ρ and
tρ need to be modified due to the presence of serial correlation.
M.-Y. Chen I(0) vs I(1)
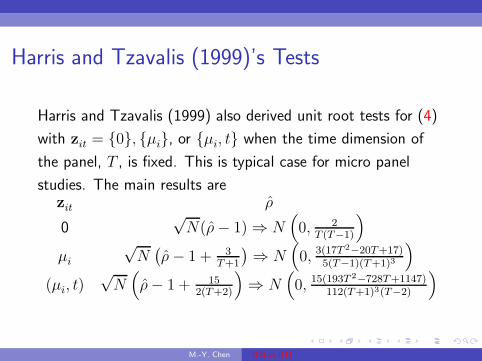
Harris and Tzavalis (1999)’s Tests
Harris and Tzavalis (1999) also derived unit root tests for (4)
with zit = {0}, {µi}, or {µi, t} when the time dimension of
the panel, T , is fixed. This is typical case for micro panel
studies. The main results arezit ρ
0√N(ρ− 1) ⇒ N
(
0, 2T (T−1)
)
µi
√N(
ρ− 1 + 3T+1
)
⇒ N(
0, 3(17T2−20T+17)
5(T−1)(T+1)3
)
(µi, t)√N(
ρ− 1 + 152(T+2)
)
⇒ N(
0, 15(193T2−728T+1147)
112(T+1)3(T−2)
)
M.-Y. Chen I(0) vs I(1)

Im, Pesaran and Shin (2003)’s Tests
The tests of Levin and Lin (1992) are restrictive in the sense
that it requires ρ to be homogeneous across i. Im, Pesaran
and Shin (2003) allow for heterosgeneous coefficient of yit−1
and proposed an alternative testing procedure based on the
augmented DF tests when uit is serially correlated with
different serial correlation properties across cross-sectional
units, i.e., uit =∑pi
j=1 ψijuit−j + ǫit. Substituting this uit in
(4), we get
yit = ρiyit−1 +
pi∑
j=1
ψij△yit−j + z′itγ + ǫit, i = 1, . . . , N, t = 1, . . . , T,
M.-Y. Chen I(0) vs I(1)

The null hypothesis is
H0 : ρi = 1
for all i against the alternative hypothesis
Ha : ρi < 1
for at least one i. The t-statistic suggested by Im, Pesaran and
Shin (2003) is defined as
t =1
N
N∑
i=1
tρi, (6)
where tρiis the individual t-statistic of testing H0 : ρi = 1 in (5). It is
known that for a fixed N ,
tρi⇒∫ 1
0 WiZdWiZ[
∫ 1
0 W2iZ
]1/2= tiT (7)
as T → ∞.M.-Y. Chen I(0) vs I(1)
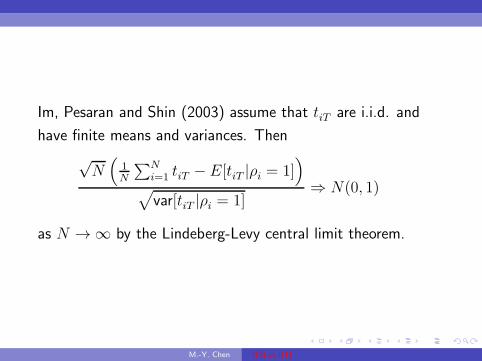
Im, Pesaran and Shin (2003) assume that tiT are i.i.d. and
have finite means and variances. Then
√N(
1N
∑Ni=1 tiT − E[tiT |ρi = 1]
)
√
var[tiT |ρi = 1]⇒ N(0, 1)
as N → ∞ by the Lindeberg-Levy central limit theorem.
M.-Y. Chen I(0) vs I(1)
Hence, the test statistic of Im, Pesaran and Shin (2003) has
the limiting distribution as
tIPS =
√N(t− E[tiT |ρi = 1])√
var[tiT |ρi = 1]⇒ N(0, 1)
as T → ∞ followed by N → ∞ sequentially. The values of
E[tiT |ρi = 1] and var[tiT |ρi = 1] have been computed by Im,
Pesaran and Shin (2003) via simulations for different values of
T and pi’s.
M.-Y. Chen I(0) vs I(1)
Combining p-value TestsLet pi be the p-value of a unit root test for cross-section i, Maddala and
Wu (1999) and Choi (1999) proposed a Fisher type test as:
P = −2
N∑
i=1
ln pi (8)
which combines the p-value from unit root tests for each cross-section i
to test for unit root in panel data. P is distributed as χ2 with 2N
degrees of freedom as Ti → ∞ for all N . When pi closes to 0 (null
hypothesis is rejected), ln pi closes to −∞ so that large value P will be
found and then the null hypothesis of existing panel unit root will be
rejected. In contrast, when pi closes to 1 (null hypothesis is not
rejected), ln pi closes to 0 so that small value P will be found and then
the null hypothesis of existing panel unit root will not rejected.
M.-Y. Chen I(0) vs I(1)
Choi (1999) pointed out the advantages of the Fisher test: (1) the
cross-sectional dimension, N , can be either finite or infinite, (2) each
group can have different types of nonstochastic and stochastic
components, (3) the time series dimension, T can be different for each i
(imbalance panel data), and (4) the alternative hypothesis would allow
some groups to have unit roots while others may not. A main
disadvantage involved is that the p-value have to be derived by Monte
Carlo simulations.
When N is large, Choi (1999) also proposed a Z test,
Z =
1√N
∑Ni=1(−2 ln pi − 2)
2(9)
since E[−2 ln pi] = 2 and var[−2 ln pi] = 4. Assume pi’s are i.i.d. and
use the Lindeberg-Levy central limit theorem to get
Z ⇒ N(0, 1)
as Ti → ∞ followed by N → ∞.
M.-Y. Chen I(0) vs I(1)

Hadri (1999)’s Test: KPSS TypeLet eit be the residuals from the regression:
yit = z′
itγ + eit (10)
and σ2e be the estimate of the error variance. Also, let Sit be
the partial sum process of the residuals,
Sit =
t∑
j=1
eij .
Then the LM statistic is
LM =1N
∑Ni=1
1T 2
∑Tt=1 S
2it
σ2e
.
M.-Y. Chen I(0) vs I(1)

It can be shown that
LM →p E
[∫
WiZ
]
as T → ∞ followed by N → ∞ provided E[∫
W 2iZ] <∞.
Also,
√N(LM − E[
∫
W 2iZ])
√
var[∫
W 2iZ]
⇒ N(0, 1)
as T → ∞ followed by N → ∞.
M.-Y. Chen I(0) vs I(1)
Panel Unit Roots Tests in R: CADFtest
The asymptotic p-values of the Hansen’s (1995)Covariate-Augmented Dickey Fuller (CADF) test for a unitroot are computed using the approach outlined in Costantiniet al. (2007).
1. CADFpvalues: p-values of the CADF test for unit roots
CADFpvalues(t0, rho2 = 0.5, type=c(”trend”, ”drift”, ”none”))
2. CADFtest: Hansen’s Covariate-Augmented Dickey Fuller (CADF)
test for unit roots
M.-Y. Chen I(0) vs I(1)
Panel Unit Roots Tests in R: plm
1. purtest: Unit root tests for panel data
purtest(object, data = NULL, index = NULL, test=
c(”levinlin”, ”ips”, ”madwu”, ”hadri”), exo = c(”none”,
”intercept”, ”trend”), lags = c(”SIC”, ”AIC”, ”Hall”),
pmax = 10, Hcons = TRUE, q = NULL, dfcor = FALSE,
fixedT = TRUE, ...)
M.-Y. Chen I(0) vs I(1)

M.-Y. Chen I(0) vs I(1)