universidad tÉcnica particular de loja la...
TRANSCRIPT

UNIVERSIDAD TÉCNICA PARTICULAR DE LOJA La Universidad Católica de Loja
CARATULA
ÁREA TÉCNICA
TÍTULO DE INGENIERO EN ELECTRÓNICA Y TELECOMUNICACIONES
Diseño y construcción de un dosificador electrónico aplicado a la industria de químicos de sanitización de alimentos
TRABAJO DE TITULACIÓN.
AUTOR: Torres Carrión, Renato Benjamín
DIRECTOR: Calderón Córdova, Carlos Alberto, Ing.
LOJA – ECUADOR
2016

Esta versión digital, ha sido acreditada bajo la licencia Creative Commons 4.0, CC BY-NY-SA: Reconocimiento-No comercial-Compartir igual; la cual permite copiar, distribuir y comunicar públicamente la obra, mientras se reconozca la autoría original, no se utilice con fines comerciales y se permiten obras derivadas, siempre que mantenga la misma licencia al ser divulgada. http://creativecommons.org/licenses/by-nc-sa/4.0/deed.es
2016

ii
APROBACIÓN DEL DIRECTOR DEL TRABAJO DE TITULACIÓN
Ingeniero.
Carlos Alberto Calderón Córdova.
DOCENTE DE LA TITULACIÓN
De mi consideración:
El presente trabajo de titulación: Diseño y construcción de un dosificador electrónico
aplicado a la industria de químicos de sanitización de alimentos realizado por Torres Carrión
Renato Benjamín, ha sido orientado y revisado durante su ejecución, por cuanto se aprueba
la presentación del mismo.
Loja, octubre de 2016
f) …………………………..

iii
DECLARACIÓN DE AUTORÍA Y CESIÓN DE DERECHOS
Yo Torres Carrión Renato Benjamín declaro ser autor del presente trabajo de titulación:
Diseño y construcción de un dosificador electrónico aplicado a la industria de químicos de
sanitización de alimentos, de la Titulación de Electrónica y Telecomunicaciones, siendo
Carlos Alberto Calderón Córdova director del presente trabajo; y eximo expresamente a la
Universidad Técnica Particular de Loja y a sus representantes legales de posibles reclamos
o acciones legales. Además, certifico que las ideas, conceptos, procedimientos y resultados
vertidos en el presente trabajo investigativo, son de mi exclusiva responsabilidad.
Adicionalmente declaro conocer y aceptar la disposición del Art. 88 del Estatuto Orgánico de
la Universidad Técnica Particular de Loja que en su parte pertinente textualmente dice:
“Forman parte del patrimonio de la Universidad la propiedad intelectual de investigaciones,
trabajos científicos o técnicos y tesis de grado o trabajos de titulación que se realicen con el
apoyo financiero, académico o institucional (operativo) de la Universidad”
F...............................................................
Autor: Torres Carrión Renato Benjamín
Cédula: 1104778996

iv
DEDICATORIA
Este trabajo es dedica a mis padres que son mi principal fortaleza y quienes a lo largo de mi
vida han velado por mi bienestar y educación siendo mi apoyo en todo momento
depositando su entera confianza en cada reto que se me presentaba sin dudar ni un solo
momento en mi inteligencia y capacidad, es por ellos que soy lo que soy ahora. A Romina
que me ha venido apoyando durante 6 años de mi vida. Gracias a ti por enseñarme a ser
más fuerte.

v
AGRADECIMIENTO
Agradezco a aquellas personas que sin saber mi actuar confiaron en mí y me dieron una
oportunidad para demostrar mi ímpetu y amor por las cosas que hago. Agradezco
infinitamente a los docentes de la UTPL que me enseñaron y compartieron sus
conocimientos y esfuerzo para que en este momento me sienta preparado profesionalmente
para enfrentarme al mundo laboral. Hernán Samaniego, Marco Morocho, Jorge Luis
Jaramillo, Daniel Aguirre, Carlos Calderón, Byron Maza.

vi
ÍNDICE DE CONTENIDOS
ÍNDICE DE CONTENIDOSCARATULA..............................................................................................................................i
APROBACIÓN DEL DIRECTOR DEL TRABAJO DE TITULACIÓN..............................ii
DECLARACIÓN DE AUTORÍA Y CESIÓN DE DERECHOS.........................................iii
DEDICATORIA......................................................................................................................iv
AGRADECIMIENTO..............................................................................................................v
ÍNDICE DE CONTENIDOS..................................................................................................vi
RESUMEN...............................................................................................................................1
ABSTRACT.............................................................................................................................2
INTRODUCCIÓN....................................................................................................................3
CAPÍTULO I............................................................................................................................5
1. GENERALIDADES......................................................................................................51.1. Dosificadores.........................................................................................................................8
1.1.1. Dosificadores de sustancias químicas......................................................................91.2. Módulo de generación de energía eléctrica....................................................................11
1.2.1. Paneles Solares..........................................................................................................121.2.2. Hidrogeneradores.......................................................................................................15
1.3. Módulo de almacenamiento de energía eléctrica..........................................................151.3.1. Baterías de ion-litio.....................................................................................................161.3.2. Batería de de litio-polímero.......................................................................................171.3.3. Baterías de níquel-cadmio........................................................................................181.3.4. Batería de níquel-metal-hidruro................................................................................181.3.5. Comparativa entre las baterías................................................................................191.3.6. Circuitos reguladores de carga para baterías........................................................20
1.4. Módulo de sensores y adquisición de datos...................................................................201.4.1. Sensores medidores de tasa de flujo o caudal......................................................211.4.2. Sensores de temperatura..........................................................................................221.4.3. Sensores de humedad...............................................................................................24
1.5. Dispositivos actuadores.....................................................................................................251.5.1. Electroválvulas............................................................................................................251.5.2. Bombas peristálticas..................................................................................................26
1.6. Módulo central de procesamiento....................................................................................271.6.1. Plataforma de hardware y software libre Arduino..................................................271.6.2. Arduino Mega 2560....................................................................................................27
1.7. Módulo de interfaz de usuario..........................................................................................281.7.1. Pantallas táctiles.........................................................................................................28
1.8. Estándares de protección IP y NEMA.............................................................................29
CAPITULO II.........................................................................................................................31
2. METODOLOGÍA Y ELEMENTOS...........................................................................31

vii
2.1. Metodología.........................................................................................................................322.1.1. Hipótesis......................................................................................................................322.1.2. Descripción del proceso de dosificación en el dispositivo....................................322.1.3. Variables del proceso.................................................................................................33
2.2. Elementos del sistema de dosificación propuesto.........................................................332.2.1. Bomba peristáltica YW01-DC12V............................................................................342.2.2. Electroválvula FPD-270A..........................................................................................392.2.3. Sensor de flujo YF-S201...........................................................................................422.2.4. Sensores de flujo YF-S401.......................................................................................452.2.5. Sensor de humedad y temperatura DHT-11..........................................................472.2.6. Panel solar policristalino............................................................................................502.2.7. Batería Li-Po Floureon 2200 mAh 3s......................................................................512.2.8. LCD Touch Shield 2.8” 61505v................................................................................52
CAPITULO III........................................................................................................................54
3. DISEÑO Y CONSTRUCCIÓN DEL SISTEMA......................................................543.1. Diagrama unifilar del proceso...........................................................................................553.2. Diagrama P&ID...................................................................................................................563.3. Algoritmo de programación...............................................................................................583.4. Integración de los dispositivos y diseño del PCB..........................................................623.5. Interfaz de visualización....................................................................................................653.6. Diseño mecánico................................................................................................................663.7. Ensamblaje e implementación del prototipo...................................................................70
4. EVALUACIÓN DE DESEMPEÑO Y ANÁLISIS DE RESULTADOS..................734.1. Pruebas realizadas.............................................................................................................744.2. Pruebas de laboratorio.......................................................................................................754.3. Comparación con otros dispositivos................................................................................774.4. Análisis de resultados........................................................................................................82
RECOMENDACIONES........................................................................................................92
BIBLIOGRAFÍA.....................................................................................................................93

1
RESUMEN
En este proyecto se desarrolló un dosificador automático orientado a la utilización en
cadenas de supermercados e industrias alimenticias donde se usan químicos de
desinfección y sanitización con la finalidad de disminuir los porcentajes de contaminación de
alimentos y utensilios comunes, integrando dispositivos actuadores y sensores para
mantener los valores adecuados del químico Amonio Cuaternario (AmCu) en partes por
millón (ppm) en una mezcla resultante de 2 Gal o 4 Gal, y para diagnosticar fallos o fugas de
líquidos dentro del dispositivo por medio de sensores de temperatura y humedad. Para la
evaluación del funcionamiento del prototipo, se realizó un conjunto de 40 experimentos de
laboratorio en los cuales se midieron dos variables: el volumen del fluido resultante y su
respectiva concentración del químico, determinadas por medio de probetas cilíndricas
graduadas (resolución 10 ml) y una cinta reactiva de medición de concentración de AmCu,
los resultados obtenidos fueron: error relativo promedio menor a 1% y 2 % para dosificación
de 4 Gal y 2 Gal, respectivamente; la concentración de AmCu está dentro del rango
permitido, es decir entre 150 ppm y 200 ppm. Además la comparación con otros dispositivos
de funcionalidades similares demostró superioridad en cuanto a portabilidad, facilidad de
uso, precisión y bajo costo.
PALABRAS CLAVES: dosificador, sanitización, interfaz de usuario.

2
ABSTRACT
By working on this project an automatic dispenser was developed. This device is intended to
be used in supermarket chains as well as food industries where chemical products are used
for disinfection and sanitizing in order to reduce the percentage of food and common utensils
contamination by putting together activating devices and sensors to maintain the appropriate
fractions of Quaternary Ammonium chemical (AmCu) in parts for million (ppm) in a resulting
blend of 2 Gal or 4 Gal; moreover, to identify malfunction or fluid leaks inside the device via
temperature and humidity sensors. In order to evaluate the prototype performance, 40
laboratory experiments were executed, focusing in two variables: the volume of the resulting
fluid and its respective chemical concentration. The procedure involved graded test tubes
(resolution of 10 ml) and a reactive tape to measure the AmCu concentration. The obtained
results include: relative average error under 1% and 2% to dose 4 Gal and 2 Gal,
respectively; and the AmCu concentration contained within the allowed range, between 150
ppm and 200 ppm. The prototype achieved superiority in terms of portability, ease of use,
accuracy and low cost when compared to other devices of similar functionality.
KEYWORDS: dosing, sanitation, user interface.

3
INTRODUCCIÓN
En busca del desarrollo de nuevas soluciones para mejorar la salubridad de los alimentos,
se fomenta las buenas prácticas de protección ante elementos contaminantes a los que
puedan estar expuestos. Una de las buenas prácticas para la higiene de los alimentos es
mantenerlos en un ambiente seguro y limpio, cumpliendo con las normas y
recomendaciones necesarias como temperaturas adecuadas para su preservación,
esterilización de utensilios de cocina y los tiempos o fechas en que los alimentos se deben
comer, servir o vender [1].
En un informe publicado por la Administración de Alimentos y Medicamentos de EE.UU.
(FDA - Food and Drug Administration), se hizo un estudio del porcentaje de contaminación
de equipos y utensilios en las instalaciones como parte de una evaluación para determinar
los factores de riesgo de enfermedades transmitidas por los alimentos, dando como
resultado que la principal causa es la limpieza y desinfección inadecuada de las superficies
de contacto con alimentos fuera de los porcentajes de cumplimiento, que van desde el 25%
en las escuelas primarias a 58% en los departamentos de delicatessen de supermercados
[2].
En las cadenas de supermercados e industrias alimenticias donde se aplican los procesos
de desinfección y sanitización se requiere un manejo correcto de dosis de químicos para
lograr una reducción de 99,999% de microorganismos patógenos, para ello se automatiza
procesos manuales de dosificación para evitar problemas de salud en los consumidores [2].
En base a lo anterior, se evidencia que a nivel internacional se requiere la implementación
de dosificadores automáticos de los procesos de desinfección y sanitización mediante
químicos destinados para ello, donde los usuarios finales de dichos sistemas son las
principales cadenas de supermercados, restaurantes y demás industrias alimenticias que
utilizan estos productos químicos con el fin de mantener la calidad y garantizar la salubridad,
conforme a lo establecido por las reglamentaciones gubernamentales en lo que respecta a
salud pública de cada país.
En la actualidad se utiliza dosificadores que provocan un desperdicio de tiempo y recursos
por razones inherentes a los cálculos subjetivos provocados por procesos manuales,
reflejando un gasto innecesario que se puede evitar utilizando un sistema automatizado que
realice las funciones de dosificación. Además, la mayoría de estos dosificadores utilizan
dispositivos analógicos y no cuentan con una interfaz de usuario para visualizar datos

4
relativos al proceso. Además, su tamaño, el tipo de conexión permanente a una fuente de
corriente alterna (AC) y la falta de integración de un sistema de control de flujo de agua en el
dosificador son otros aspectos que disminuyen sus funcionalidades.
En base a lo descrito anteriormente el objetivo principal del presente proyecto consiste en el
diseño y desarrollo de un prototipo electrónico dosificador de químicos de desinfección (Deli
Detergent) y sanitización (Q-san 10) de alimentos, con la finalidad de crear una mezcla que
cumpla con las proporciones apropiadas, y por lo tanto, las características requeridas por el
usuario. Además de la funcionalidad precisa, se añade características como portabilidad,
bajo costo e interfaz gráfica que mejora la experiencia del usuario. Para ello se propone una
arquitectura conformada por dispositivos electrónicos como actuadores, sensores,
dispositivos de procesamiento y dispositivos de interfaz que permitan al operador
parametrizar el proceso de dosificación.
Para el desarrollo del objetivo del proyecto planteado se ha seguido una metodología la cual
se desglosa en los capítulos del presente documento. El capítulo 1 hace un análisis de los
sistemas y dispositivos automáticos de dosificación que existen en la actualidad, y, además
se describe y justifica la elección de cada elemento que integra el dosificador planteado. El
capítulo 2 se refiere a la metodología utilizada y materiales que se integran en el dispositivo
con sus respectivas características técnicas y diagramas de conexiones. En el capítulo 3 se
describe el diseño electrónico del circuito que forma parte del módulo central de
procesamiento, incluyendo los algoritmos, el diseño mecánico y la ubicación física de los
componentes dentro del dispositivo. El capítulo 4 contempla las pruebas realizadas, la
comparación del prototipo diseñado con otros dispositivos similares que existen en la
industria y el análisis de los resultados obtenidos en base a experimentos realizados en un
ambiente de laboratorio.

CAPÍTULO I
1. GENERALIDADES

6
Para el diseño del sistema de dosificación propuesto, se toma como referencia experiencias
y resultados de sistemas con características similares, así también se analiza las
arquitecturas hardware y software utilizadas para el desarrollo de los prototipos
tecnológicos.
En el proyecto “Diseño y construcción de un dosificador de tres productos de forma
secuencial”, se especifica los tipos de dosificadores y los dispositivos utilizados para
dosificar, así también se presenta una alternativa para la dosificación secuencial de sólidos
pudiendo ser la base para estudios posteriores de dosificadores de polvos o líquidos [3].
En la tesina “Diseño de un dosificador de cloro líquido”, se desarrolla un dosificador
enfocado a las plantas de tratamiento de agua potable para garantizar la cantidad necesaria
de cloro mezclado con agua utilizando un sistema basado en venoclisis para la dosificación
por goteo [4].
En el proyecto “Automatización de una máquina dosificadora para dosis pequeñas de
líquidos en la empresa Fuller Pinto”, se propone la arquitectura hardware de un dosificador a
partir de electroválvulas, PLC (Controlador lógico programable), sensores, entre otros, para
una empresa de productos de aseo de uso industrial, la arquitectura se aplicó a una
máquina dosificadora de fragancias [5]. Esta arquitectura de dosificación es precisa sin
embargo no es aplicable a los químicos de sanitización del presente proyecto debido a que
éstos requieren otro procedimiento de dosificación.
Existen industrias dedicadas a la elaboración de dosificadores de químicos de limpieza,
como la marca Knight de IDEX Corporation que posee dosificadores analógicos y digitales
con altos niveles de precisión, sin embargo su precio es de aproximadamente 800 USD [6].
Este costo afecta al comprador ya que por menos de la mitad de ese costo se puede
obtener un dispositivo con las mismas funcionalidades. Para demostrar esto, se realiza una
comparación de costo con el dosificador propuesto, y además, a diferencia de los
dosificadores de la marca Knight, se propone un sistema sustentable con baterías
recargables.
Otra empresa es Hydro System, que entre otras cosas, se dedica a la elaboración de
sistemas inteligentes de dosificación con el objetivo principal de aumentar la rentabilidad de
las empresas que requieran de sus dispositivos, ya que al estar basados en un sistema
automático posee tiempos cortos de ejecución del proceso y altos niveles de precisión de los
resultados [7].
Steener Pumps (establecida en 1957 en Jacksonville, Florida, EE.UU.) es una compañía
dedicada a la fabricación de dispositivos que forman parte de dosificadores, uno de sus

7
productos son las bombas peristálticas para la dosificación fiable y precisa de soluciones
líquidas, aplicadas en: desinfección, ajuste de pH, eliminación de manchas de hierro, la
salud animal, la corrosión, control de escala, entre otras. Poseen una gama de bombas para
inyectar aditivos a procesos con agua o industriales [8].
Existen algunos elementos que conforman un dosificador de líquidos que son comunes para
todos los dispositivos, como los actuadores y sensores, sin embargo la diferencia principal
entre el sistema propuesto en este trabajo y los citados radica en la confiabilidad, el bajo
costo, auto-sustentabilidad energética, tamaño portable e interfaz de usuario intuitivo.
La arquitectura del sistema de dosificación propuesto está organizado por módulos (ver
Figura 1). Cada módulo representa una parte del sistema y las flechas indican el flujo de
información en el caso del módulo de interfaz de usuario, en el módulo de sensores y en el
módulo de actuadores. En cuanto a los módulos de generación y almacenamiento de
energía, las flechas representan la dirección o flujo de energía hacia el módulo central de
procesamiento.
MÓDULOCENTRALDEPROCESAMIENTO
MÓDULODEALMACENAMIENTODE
ENERGÍA
MÓDULODEGENERACIÓNDEENERGÍA
MÓDULODEACONDICIONAMIENTOY
ADQUISICIÓNDEDATOSDESENSORES
MÓDULODEINTERFAZDEUSUARIO
MÓDULODEACTUADORES
Figura 1. Diagrama general de la arquitectura del dosificador. Fuente: Renato Torres Carrión. Elaborado: Renato Torres Carrión.
Con la finalidad de seleccionar la mejor opción para los elementos que van a formar parte de
cada uno de los módulos del dispositivo de dosificación propuesto, en las siguientes

8
secciones se hará una breve revisión de las generalidades de los tópicos inherentes a los
dosificadores de químicos.
1.1. Dosificadores
Según [4], un dosificador es un equipo que por lo general forma parte integral de una
línea de producción desde el punto de vista industrial, pero no solo se utiliza dosificadores
en éste ámbito sino también en el ámbito médico ya que según la Real Academia de la
Lengua Española dosificar puede ser dividir o graduar las dosis de un medicamento, o
graduar la cantidad o porción de alguna cosa [9].
La función principal de un dosificador es controlar el flujo de un producto o sustancia
agregado a otro con la finalidad de asegurar y controlar la mezcla correcta para obtener un
resultado final. La primera máquina dosificada fue creada en el año de 1872 por los
hermanos John e Isaías Hyatt, nunca se imaginaron que su invención iba a tener tal impacto
en la sociedad y la industria. La primera máquina de dosificación consistió en un pistón que
contenía en la cámara derivados celulósicos fundidos y era accionada manualmente. Era un
diseño derivado de los métodos para obtener piezas metálicas, sin embargo, varias décadas
después se atribuye a Foster Grant (en 1934) la primera máquina de dosificación hidráulica,
la cual requería de moldes más resistentes y de mayor productividad [5].
Hay que saber diferenciar entre un dosímetro que se utiliza para medir dosis y un dosificador
que se utiliza cuando se requiere combinar cantidades.
Los dosificadores existen de tantos tipos como procesos industriales que los requieren
debido a que su campo de aplicación es muy extenso, por ello su accionamiento se puede
clasificar en dosificadores mecánicos, neumáticos y eléctricos [3].
Los dosificadores mecánicos poseen un accionamiento manual y son parecidos a los
dosímetros, con la diferencia de que estos últimos los utilizan en la industria sanitaria por la
combinación de elementos en dosis fijas, los más comunes son los dosificadores de jabón,
de detergente, entre otros. Estos dispositivos también existen en bares como dosificadores
de licor y bebidas [3].
Los dosificadores neumáticos sin electricidad, se los conoce así porque funcionan sin
energía eléctrica y son utilizados comúnmente en las redes de agua, ya que aprovechan la
presión del agua como fuerza electro-motriz [3].

9
Los dosificadores eléctricos son elementos que funcionan con energía eléctrica, los valores
se toman de sensores, las decisiones están relacionadas con microprocesadores que son
los que controlan todo el sistema, y los elementos motrices están basados en motores o
elementos neumáticos. Su principal ventaja es que se puede integrar un sistema de
comunicación de datos, lo cual lo convierte en el principal interés de desarrollo en los tipos
de dosificadores [3].
1.1.1. Dosificadores de sustancias químicas.
Cuando se trata de aplicaciones en la industria de químicos, es posible que se produzca un
desgaste inadecuado de los elementos de un dispositivo dosificador por donde fluye un
compuesto y en algunos casos la cantidad que se debe mezclar con agua u otro líquido
suele ser del orden de los mililitros de químico comparado con galones de agua, lo cual
conlleva a que los sistemas de dosificación sean más precisos y garanticen una mezcla
adecuada.
La dosificación de sustancias químicas se efectúa mediante dosificadores o dispositivos
capaces de liberar cantidades determinadas de producto químico en un tiempo específico,
sin embargo esto puede ser medido no solo por el tiempo transcurrido, sino también por el
flujo medido con el uso de sensores [10].
Existe una clasificación con respecto al estado en que se encuentra el químico a suministrar
que se muestra en la Figura 2, donde se describe principalmente la clasificación de la
dosificación de sustancias químicas en solución.
Para la dosificación de líquidos se utilizan dos técnicas principalmente, una en la cual
recipientes dispensadores llenan tubos dosificadores de acuerdo a volúmenes escogidos,
los cuales son monitoreados mediante sensores de nivel y de presión, y evacuados
mediante gravedad o por impulso. La segunda opción es mediante bombas dosificadoras
acopladas con motores eléctricos que en algunos casos disponen de controladores de
velocidad [3].

10
Figura 2. Clasificación de dosificadores de sustancias químicas [10]. Fuente: Biblioteca virtual de la Organización Panamericana de la Salud. Elaboración: Renato Torres Carrión.
1.1.1.1. Dosificadores de solución por gravedad.
Son utilizados para distribuir o suministrar una sustancia o reactivo líquido donde no está
presente la energía eléctrica, empleados especialmente en plantas pequeñas y medianas, y
los más comunes son los de carga constante y los de carga regulable. Los de carga
constante se basan en mantener una carga constante de agua sobre un orificio para tener
un caudal de dosificación constante, el caudal se calibra a la salida del orificio mediante una
válvula [10].
1.1.1.2. Dosificadores de solución por bombeo.
En los sistemas por bombeo, los más usuales son los de bomba de pistón y de diafragma.
Las bombas dosificadoras de pistón son muy precisas, pero deben emplearse con
precaución en el caso de productos abrasivos o muy corrosivos. Según el tipo de bomba, el
caudal puede oscilar entre varias decenas de mililitros/hora a algunos miles de litros/hora
[10].
Las bombas dosificadoras de diafragma son bombas de potencia que desplazan un volumen
predeterminado de líquido en un tiempo específico, se denominan también de volumen
Dosificadores de sustancia químicas
SecoVolumétricos
Gravimétricos
Solución
Gravedad
Orificio de carga constante o regulable
Torres de saturación
Bombeo
Desplazamiento positivo
Desplazamiento rotatorio
Boquillas
GasSolución al vacío
Aplicación directa

11
controlado. La propulsión en éstas suele ser externa y de velocidad fija o variable mediante
un motor eléctrico. La bomba posee un diafragma flexible, con un lado en contacto directo
con el líquido de proceso, su impulso puede ser hidráulico o mecánico, éste diafragma se
llena de líquido para luego ser evacuado puesto que poseen un mecanismo de ajuste de
carrera, estos son los que permiten variar la capacidad de las bombas dosificadoras [3].
Las bombas dosificadoras se usan en varios ámbitos para la dosificación exacta de un
medio, por ejemplo en agricultura para la dosificación exacta de abono o en la cría de
animales para repartir medicamentos. El procedimiento sencillo y preciso de las bombas
dosificadoras permite usarlas en muchos campos de aplicación. Estas bombas dosificadoras
permiten medir de forma constante en el tiempo el mismo volumen, mejorando el resultado y
reduciendo o evitando fallos subjetivos o de insuficiencias que se producen inevitablemente
por el factor humano [11].
1.2. Módulo de generación de energía eléctrica
En el diseño de dispositivos electrónicos móviles, el consumo de energía es una de las
restricciones más complejas de superar, y las tendencias actuales indican que esto
continuará siendo un problema en el futuro. Equipos electrónicos de consumo se están
convirtiendo en pequeños y portátiles dispositivos que proporcionan a los usuarios una
amplia gama de funciones, desde la comunicación a la reproducción de música. La
tecnología de las baterías y la potencia de consumo del dispositivo limitan el tamaño, peso y
tiempo de vida autónoma [12].
Para la implementación de un dosificado electrónico en la industria de químicos de
sanitización se requiere un sistema auto sustentable de energía ya que en los lugares donde
se podrían instalar estos dispositivos, se imposibilita la conexión a una fuente de energía
convencional, lo cual pone en discusión la utilización de una forma de generación de energía
alternativa que sea factible según la ubicación del dosificador.
Las energías alternativas comprenden todas aquellas energías de origen no fósil y que no
han participado significativamente en el mercado mundial de la energía. No se debe
confundir el concepto de energía renovable con el de energía no-convencional, pues entre
las fuentes energéticas convencionales se encuentran algunas con característica de
renovables, como la hidráulica o la bioenergía. Existen además fuentes no renovables y no
convencionales como la energía geotérmica o la fusión nuclear, en cambio las energías no
agotables, como la eólica, comúnmente se incluyen entre las renovables [13].

12
Existen varias formas de generar energía eléctrica a partir de otras fuentes de energía. En
este trabajo se describen únicamente las que según factores técnicos son las más
adecuadas para integrar en un dosificador automático, de esta forma se determinó el
sistema que más conviene para solventar el gasto de energía eléctrica que conlleva el
proceso.
1.2.1. Paneles Solares.
Antes de comprender el concepto de paneles solares debemos saber qué es la energía
solar fotovoltaica, la cual consiste en la transformación directa de la energía del sol en
energía eléctrica, aprovechando las propiedades de los materiales semiconductores
mediante las células fotovoltaicas [14].
El principal material utilizado para la fabricación de las células solares es el silicio. Su
funcionamiento se basa en la incidencia de la luz (fotones) sobre las superficies de la célula,
lo cual genera una corriente que suele ser utilizada como fuente de energía [14].
Su fabricación es un proceso costoso tanto económicamente como por el tiempo que esto
conlleva, sin embargo el silicio es un semiconductor que se encuentra en grandes
cantidades en la tierra y además de éste, se están preparando otros semiconductores para
ser utilizados [14].
Las instalaciones solares fotovoltaicas constan de paneles solares (módulos fotovoltaicos)
individuales, que a su vez contienen células solares individuales. Cuando brilla el sol, una
célula solar se comporta casi como una batería, la luz solar recibida separa los electrones
de modo que forman una capa de carga positiva y una de carga negativa en la célula solar;
esta diferencia de potencial genera una corriente eléctrica [15].
Cuanta más luz reciba una célula, más será la potencia de corriente eléctrica generada, y
para aumentar dicha potencia se combinan varias células y se conectan formando un panel
solar. Estos paneles a su vez se pueden integrar para aumentar aún más la potencia
formando una planta fotovoltaica [15].
Un primer criterio de clasificación de células fotovoltaicas se refiere al material empleado en
su construcción: células monocristalinas, células policristalinas y células amorfas.

13
Las células monocristalinas (cSi) son formadas por un solo tipo de cristal y consiguen
rendimientos superiores al 30 %. Las células policristralinas (pSi) son fabricadas a partir de
un agregado de materiales, como silicio mezclado con Arsenio y Galio, y consiguen
rendimientos del 15 %. Las células amorfas no poseen una estructura cristalina y alcanzan
rendimientos del 6 % [16].
Un segundo criterio de clasificación es la geometría de las células FV (fotovoltaicas):
redondas y cuadradas. Las células FV originales eran de geometría redonda. Las versiones
actuales permiten obtener una geometría cuadrada, que permite mayor compactación de las
células en el panel FV [16].
La utilización de paneles solares en la implementación de dosificadores electrónicos es un
método factible para mantener alimentada a una batería con las características necesarias
para poner a funcionar todos los elementos del dispositivo. Debido a su posible ubicación,
un arreglo de paneles solares dependiendo de sus características técnicas, podrían
solventar todo el consumo de energía que implica el uso de la batería de un dosificador
durante aproximadamente un día.
1.2.1.1. Panel solar monocristalino.
Este tipo de celda tiene una estructura cristalina ordenada, con cada átomo idealmente
situado en una posición y cuenta un comportamiento predecible y uniforme. El silicio pasa a
través de varios ciclos de filtración intensiva lenta con la energía y los procesos de
separación y por lo tanto es el tipo más costoso de silicio [17].
Entre sus principales ventajas: poseen las mayores tasas de eficiencia puesto que se
fabrican con silicio de alta pureza, su vida útil es más larga lo que da oportunidad a que
algunos fabricantes ofrezcan garantías de hasta 25 años y suelen funcionar mejor que
paneles policristalinos de similares características en condiciones de poca luz [17].
Sus principales desventajas son: desde el punto de vista económico para uso doméstico
resulta más ventajoso usar paneles policristalinos, si el panel se cubre parcialmente por una
sombra, el circuito entero puede averiarse y se derrocha una gran cantidad de silicio en el
proceso de fabricación [17].

14
1.2.1.2. Panel solar policristalino.
Este tipo de celda contiene varias regiones de silicio cristalino que se mantienen juntas a
través de un enlace covalente y separados por “límites de grano”. El silicio pasa a través de
un menor número de ciclos de filtración intensiva de energía que en los procesos de
separación de las células monocristalinas y por lo tanto es un material menos costoso para
los fabricantes [18].
Entre sus principales ventajas tenemos que el proceso de fabricación de los paneles
fotovoltaicos policristalinos es más simple, lo que redunda en menor precio y se pierde
mucho menos silicio que en el proceso de fabricación del monocristalino [17].
Sus principales desventajas son que suelen tener menor resistencia al calor que los
monocristalino por lo cual a altas temperaturas un panel policristalino funcionará peor que un
monocristalino, el calor además puede afectar a su vida útil, acortándola, y se necesita
cubrir una superficie mayor con paneles policristalinos que con monocristalinos [17].
1.2.1.3. Celdas solares flexibles.
Las células fotovoltaicas de silicio amorfo son una de las tecnologías fotovoltaicas
mejoradas debido a que no se desperdicia silicio durante su diseño. Con las placas
monocristalinas compuestas por un cristal entero y policristalinas compuestas por varios
cristales pequeños, se pierde casi la mitad del silicio en forma de polvo al cortar las placas,
lo cual no ocurre con las células fotovoltaicas de silicio amorfo [19].
Éstas son manufacturadas mediante la colocación de una fina capa de silicio amorfo (no
cristalino) sobre una amplia variedad de superficies. Estos son los menos eficiente y menos
costoso de producir de los tres tipos. Debido a la naturaleza amorfa de la capa fina, y si se
fabrica sobre una superficie flexible, el panel solar entero puede ser flexible [19]. Las
características principales son las siguientes:
- Los paneles solares amorfos para exteriores funcionan en todas las condiciones
climáticas y a su salida poseen una corriente estable. Además tienen buena
capacidad de absorción de luz difusa, luz refractada y luz directa [20].
- En comparación con el silicio cristalino, la célula solar amorfa tiene una tasa de
utilización más alta, que los hace más adecuados para una variedad de lugares [20].

15
- Su respuesta respecto a las altas temperaturas es mejor, siendo muy inferior su
pérdida de rendimiento en estas condiciones [20].
- Su instalación en posiciones no orientadas a la radiación directa del sol genera
rendimientos muy elevados en comparación con otros paneles, lo que lo hace
especialmente recomendado para ser instalado en fachadas, tejados, entre otros
lugares [20].
- Su potencia se reduce con el tiempo, especialmente durante los primeros meses,
después de los cuales es básicamente estable [20].
1.2.2. Hidrogeneradores.
Los hidrogeneradores son otro método de generación de energía. En la actualidad se están
utilizando mini y micro centrales hidráulicas con éste tipo de generadores de energía
eléctrica a partir de la energía mecánica que produce el agua al pasar por una turbina. Su
uso se está promoviendo en casas y lugares aislados que no cuentan con una red pública
de distribución de energía eléctrica cercana pero que sí disponen de una corriente de agua
de pequeña magnitud que se puede aprovechar [21].
En la implementación de un dosificado electrónico, existe la posibilidad de la utilización de
micro-hidrogeneradores que pueden ser conectados en serie con la red de distribución de
agua del lugar donde se instala el dosificador, sin embargo la cantidad de energía generada
no sería suficiente para los requerimientos de todos los componentes del dispositivo debido
a que no se trata de un caudal significativo y no existe un permanente flujo de agua para
aprovecharlo, lo cual no garantiza que los micro-generadores hidroeléctricos puedan
alimentar una batería como la requerida para un dosificador electrónico.
Luego de haber investigado acerca de las posibles opciones de generación de energía
eléctrica para un dosificador electrónico, lo más factible técnicamente es la utilización de
paneles solares policristalinos debido a su bajo costo comparativo, su disponibilidad y su
tamaño adecuado.
1.3. Módulo de almacenamiento de energía eléctrica
Se encarga de almacenar la energía generada en una batería por medio de un circuito
regulador de voltaje y un circuito de carga con la finalidad de no disminuir el tiempo de vida
útil proyectado de la batería [22].

16
Existen actualmente numerosos sistemas capaces de convertir energía química en energía
eléctrica y por tanto en trabajo útil. Estos sistemas son denominados células
electroquímicas, mientras que un conjunto de estas células es normalmente conocido como
batería [22].
Una batería es un componente que almacena electricidad para poderla entregar cuando sea
necesario. Han experimentado una gran evolución a partir de los años 90 gracias a su
utilización en telefonía móvil. Esta evolución continuará de manera imparable,
probablemente gracias a la industria del transporte, principalmente del automóvil [23].
Su funcionamiento se basa en convertir la energía química contenida en sus materiales
activos directamente en energía eléctrica por medio de una reacción de reducción-oxidación.
Este tipo de reacción implica la transferencia de electrones de un material a otro a través de
un circuito eléctrico [24].
Todo este desarrollo hace que las baterías cada vez puedan almacenar más energía en
menos espacio y a un coste inferior. Por lo tanto el desarrollo va orientado a dos aspectos:
más energía por espacio-peso y menos coste de fabricación. Los principales tipos de
baterías recargables que encontramos son: plomo-ácido, níquel-cadmio, níquel-metal-
hidruro, iones de litio, polímero de litio y zebra [23].
1.3.1. Baterías de ion-litio.
Debido al agotamiento de las reservas de los combustibles fósiles, se hace necesario el
desarrollo de fuentes alternativas limpias de tal forma que se pueda almacenar esta energía,
utilizando baterías con energías específicas elevadas y de larga vida, como las baterías de
ion-litio que cumplen estos requisitos [25].
Los primeros trabajos con la batería de litio comenzaron en 1912 por Gilbert Newton Lewis,
pero no fue hasta la década de 1970, cuando se comercializaron las primeras baterías de
litio recargables. El litio es el metal más liviano, tiene el mayor potencial electroquímico y
proporciona la mayor densidad de energía para su peso [23].
La densidad de energía de las baterías de ion-litio es típicamente el doble de las de níquel-
cadmio estándares, que poseen un potencial de mayor densidad de energía [23]. Las

17
características de carga son razonablemente buenas y se comportan de manera similar a la
de níquel-cadmio en términos de descarga [23].
El voltaje de cada celda es de 3.6 V, lo cual permite diseñar paquetes de baterías con una
sola celda. La mayoría de los teléfonos móviles de hoy en día las utilizan, ya que,
comparadas con las de níquel, se requeriría tres celdas de 1.2 V conectadas en serie para
obtener una celda con el mismo voltaje de una de ion-litio [23].
Es una batería de bajo mantenimiento, lo cual le otorga una ventaja que la mayoría de las
otras baterías no lo poseen. No hay el efecto memoria y no se requiere un ciclo programado
de carga para prolongar la vida de la batería. Además, la auto-descarga es menos de la
mitad en comparación con las de níquel-cadmio, haciendo del ion-litio muy adecuado para
aplicaciones de nivel de requerimientos de la tecnología moderna [26].
A pesar de sus ventajas generales, los iones de litio tienen sus inconvenientes. Es frágil y
requiere un circuito de protección para mantener una operación segura, incorporado en cada
paquete ya que limita la tensión de pico de cada célula durante la carga y evita que el voltaje
de la célula baje demasiado en la descarga. Además, se requiere un control de la
temperatura de la celda para evitar temperaturas extremas [26].
1.3.2. Batería de de litio-polímero.
Las baterías de polímero de litio se diferencian de las otras por el tipo de electrolito utilizado
(película plástica que no conduce la electricidad pero permite el intercambio de iones
cargados) [27].
El ánodo es una ultra delgada lámina de litio metálico que hace la función de fuente de iones
de litio (descarga) o como colector (carga). El cátodo es un material compuesto con capas
intercaladas de óxido de vanadio, negro de carbono, sal de litio y polímeros, todos ellos
laminados sobre una hoja de aluminio que sirve de colector. Las células Li-Po poseen 3.7 V
con altas corrientes, presentando una auto descarga del 2% mensual [27].
El diseño original, que data de la década de 1970, utiliza un electrolito de polímero sólido
seco. Este electrolito se asemeja a una película de un tipo de plástico que no conduce la
electricidad, pero permite el intercambio de iones [26].

18
El diseño de polímero seco ofrece simplificaciones con respecto a la fabricación, robustez, la
seguridad y la geometría de perfil delgado; con un espesor de la celda de medición de un
milímetro. Una desventaja es que sufren de mala conductividad debido a que su resistencia
interna es demasiado alta [26].
1.3.3. Baterías de níquel-cadmio.
Inventado por Waldemar Jungner en 1899, la batería de níquel-cadmio ofrece varias
ventajas sobre las de plomo-ácido, para ese entonces las dos únicas baterías recargables,
sin embargo los materiales para las de NiCd eran más caros [26].
En 1932, se hicieron avances para depositar los materiales activos dentro de un electrodo
poroso niquelado. Otras mejoras se produjeron en 1947 mediante la absorción de los gases
generados durante la carga, lo que llevó a las baterías de NiCd al sellado moderno. Era la
opción preferida para radios full dúplex, equipos médicos de emergencia, cámaras de vídeo
profesional y herramientas eléctricas [26].
Las baterías de Ni-Cd fueron por mucho tiempo las más utilizadas en los circuitos
electrónicos, ya que poseen una baja impedancia lo cual lo hace atractivo para aplicaciones
donde se requiera altas corrientes. Debido a que poseen una baja capacidad de
almacenamiento de energía y ocasionan problemas ambientales se encuentran en etapa de
discontinuidad, por esta razón no es conveniente tomarlas en cuenta al hacer una selección
[27].
Actualmente son utilizadas en la industria aérea, pero su tiempo de vida se ve comprometido
si no se le da un ciclo de descarga completo periódicamente. Entre sus ventajas están su
robustez y larga duración y una de sus principales desventajas es su nivel de contaminación
[26].
1.3.4. Batería de níquel-metal-hidruro.
Este tipo de baterías presentan una mayor capacidad de almacenamiento la cual es
compensada con mayor auto descarga.

19
Cada célula de Ni-MH puede proporcionar un voltaje de 1.2 V y una capacidad entre 0,8 y
2.9 Ah. Son las menos afectadas por el efecto memoria, en el que en cada recarga se limita
el voltaje o la capacidad, imposibilitando el uso de toda su energía [27].
La investigación sobre el níquel e hidruro metálico se inició en 1967, sin embargo la
inestabilidad con el metal-hidruro condujeron al desarrollo de la de níquel-hidrógeno (NIH)
en su lugar. Nuevas aleaciones de hidruros descubiertos en la década de 1980, finalmente,
mejoraron los problemas de estabilidad y hoy NiMH proporciona 40 % más de energía
específica que las baterías de NiCd [26].
Con el 20 % de auto-descarga en las primeras 24 horas después de la carga y el 10 % por
mes a partir de entonces, las baterías de NiMH se encuentran entre las más altas de la
clase y se ha convertido en una de las baterías recargables más fácilmente disponibles para
uso del consumidor [26].
Los fabricantes de baterías, tales como Panasonic, Energizer, Rayovac y Duracell, han
reconocido la necesidad de una batería recargable durable y de bajo costo y ofrecen NiMH
en los modelos AA, AAA y otros tamaños, queriendo atraer a los compradores cambiando
las alcalinas desechables por baterías recargables [26].
1.3.5. Comparativa entre las baterías.
Para poder realizar una correcta selección de la batería con la tecnología adecuada se tomó
en cuenta sus características y su disponibilidad, los cuales deberán estar relacionados con
las necesidades del sistema a alimentar [27].
Baterías de Iones de Litio (Li-Ion): esta tecnología se puede utilizar casi en cualquier sistema
electrónico especialmente cuando requiera de altos voltajes, altas descargas de corriente
con auto-descarga mínima y alta confiabilidad [27]. Cuando el incremento del peso y las
dimensiones son factores muy importantes y los costos por satisfacer lo antes mencionado
no sea un factor de mucha importancia, se podrá utilizar ésta tecnología [27].
Baterías de Polímeros de Litio (Li-Po): con esta tecnología, a diferencia de las baterías de
ion-litio, no se puede tener una alta confiabilidad en las celdas ya que son muy sensibles a
desperfectos en el sistema de carga, y esto puede ocasionar una explosión al interior del
sistema electrónico, sin embargo, estas baterías son más livianas que las de ion-litio [27].

20
Baterías de Níquel Metal Hidruro (Ni-Mh): se pueden utilizar en sistemas electrónicos en
donde se requiera bajos voltajes, con baja demanda y consumo de corriente, con buena
confiabilidad en los elementos que no permitan el derrame de líquidos o fuga de gases y no
presenten un riesgo para el usuario [27].
Existen otros tipos de baterías que se podrían agregar a esta comparación, sin embargo no
están dentro de las elegibles para ser integradas en un dosificador electrónico por razones
de tamaño, costo y accesibilidad de compra [23, 27].
1.3.6. Circuitos reguladores de carga para baterías.
El circuito de carga que se puede utilizar varía dependiendo del tipo de batería. Algunos
proveedores de semiconductores fabrican chips que manejan el proceso de recarga de
baterías como las de ion-litio. El uso de estos dispositivos simplifica el diseño de los
cargadores de baterías, ya sea de forma independiente o integrada en el circuito de carga
como parte del producto final [28].
National Semiconductor, por ejemplo, ofrece el LM3658 que es un cargador de un solo chip
IC (circuito integrado) para aplicaciones portátiles, pudiendo cargar de forma segura una
batería de litio-polímero o de litio-ion de una celda operando con un adaptador de corriente
alterna o un puerto USB [28].
Microchip, es otra compañía que dispone de IC’s para aplicaciones relacionadas con
cargadores de baterías, especialmente de litio-polímero y de ion-litio [24].
Para el desarrollo de este trabajo se considera la implementación, conjuntamente con el
dosificador, de un circuito de carga de una batería de litio-polímero, de tal forma que
funcione para conectar la fuente de energía eléctrica con la batería del sistema.
1.4. Módulo de sensores y adquisición de datos
Los sensores son dispositivos para detectar y señalar una condición de cambio de
cantidades capaces de medirse. Los sensores posibilitan la comunicación entre el mundo
físico y los sistemas de medición y/o de control, tanto eléctricos como electrónicos,

21
utilizándose extensivamente en todo tipo de procesos industriales y no industriales para
propósitos de monitoreo, medición, control y procesamiento [5].
Una forma de clasificar los sensores es dependiendo de su funcionamiento, llamándolos
pasivos a los que no requieren de una fuente de energía externa sino que las propias
condiciones medioambientales son suficientes para que funcionen, y activos aquellos que
requieren de una fuente externa de energía de la que reciben alimentación de corriente
eléctrica para su funcionamiento [29].
Una señal de salida de un sensor por lo general no es utilizada para trabajar con los
circuitos de los dispositivos actuadores ya que necesita ser adaptada y amplificada [29].
También puede ocurrir que la señal de salida del sensor no sea lineal o que dependa de las
condiciones de funcionamiento como la temperatura y la tensión de alimentación, en este
caso sería también necesario linealizar el sensor, así como compensar sus variaciones, y
para ello se utilizan los circuitos acondicionadores de señal [29].
Podemos decir que los circuitos acondicionadores de señal hacen que la señal de los
sensores sea válida para ser procesada por circuitos actuadores o equipos de
instrumentación, como multímetros, osciloscopios, LCD, entre otros. Entre los principales
tenemos: amplificadores operacionales, divisores de voltaje, transistores y
microcontroladores [29].
Dentro de éste módulo están considerados todos los sensores que se utilizarán para el
proceso de dosificación y el proceso de diagnóstico de algunos componentes que forman
parte del sistema de dosificación.
1.4.1. Sensores medidores de tasa de flujo o caudal.
Se denomina flujo al movimiento de fluidos por canales o conductores abiertos o cerrados.
El caudal es la cantidad de material, en peso o volumen, que fluye por unidad de tiempo
[30].
La mayoría de los caudalímetros se basan en métodos de medida indirectos y
particularmente en la detección de diferencias de presión provocadas por la inserción de un
elemento en el conducto donde se desea medir, sin embargo, se debe señalar que existen

22
inconvenientes con este método principalmente en medir con exactitud los caudales
fluctuantes [30].
Otro método es por medio de caudalímetros de turbina que consisten en una rueda
alabeada en el cual la velocidad de giro es proporcional al caudal administrado y se detecta
mediante un captador magnético incrustado en la rueda [30].
La medición que realizan estos dispositivos está relacionada con la cantidad de líquido, gas
o vapor que pasa a través de ellos. Algunos miden la cantidad de fluido que pasa a través
del medidor de flujo durante un período de tiempo, otros miden la cantidad totalizada de
fluido que ha pasado a través del sensor de flujo [31].
Existen dos tipos de medidores. Los volumétricos que determinan el caudal en volumen del
fluido, bien sea directamente por desplazamiento o bien sea indirectamente por deducción o
inferencia (presión diferencial, área variable, velocidad, fuerza, tensión inducida, torbellino)
[32].
Los de masa determinan el caudal de masa inferencialmente por compensación de la
presión, la temperatura, la densidad o aprovechando características medibles de la masa
con sistemas básicos de medida directa como los instrumentos térmicos, los de medida
angular y los de coriólis. Los medidores volumétricos son utilizados para la medida general
de caudal y se destinan los medidores de caudal básico a las aplicaciones en las que la
exactitud y la medida son importantes [32].
Los sensores de flujo que serán utilizados para medir el paso de una cantidad determinada
de químico y agua están en la categoría de caudalímetros de turbina. Las razones por las
que se utilizará este método de medida son la disponibilidad y el bajo costo de estos
sensores, además de otras características que se describirán en el siguiente capítulo.
1.4.2. Sensores de temperatura.
La medida de temperatura es una de las más comunes y más importantes que se efectúan
en los procesos industriales, casi todos los fenómenos físicos están afectados por ella, y
frecuentemente es utilizada para inferir el valor de otras variables de un proceso. Existen
diversos fenómenos que son incluidos por la temperatura y que son utilizados para medirla
como la variación de volumen o el estado de los cuerpos (sólidos, líquidos o gases) [32].

23
Algunos sensores de temperatura requieren un circuito de acondicionamiento para ser
utilizados debido a que los valores de corriente y voltaje entregados son muy pequeños y
requieren ser amplificados. Otros necesitan ADC’s (Conversor analógico-digital) para
convertir una señal analógica en digital con la finalidad de facilitar su procesamiento y
disminuir el ruido e interferencias a las que son sensibles las señales analógicas [30].
Una forma de clasificar los sensores de temperatura eléctricos es en analógicos y digitales.
Un ejemplo de sensor de temperatura analógico es el LM335 cuya precisión es de 1 ºC y un
rango de medición que va desde -40 ºC hasta 100 ºC [29].
Éste sensor se presenta en diferentes tipos de encapsulado, pero el más común es el TO-
92, que dispone de 3 pines, dos de ellos para la alimentación y el tercero que entrega un
valor de tensión proporcional a la temperatura medida por el dispositivo. Funciona como a
un diodo zener cuyo voltaje de ruptura es directamente proporcional a la temperatura, y por
cada grado de temperatura su voltaje de salida varía en 10 mV, pudiendo entregar valores
de corriente entre 400 µA y 5 mA [29].
Un sensor de temperatura digital es el lm77 provisto de una comunicación I2C, un interruptor
de salida que se activa siempre que la temperatura excede la programada y una alarma
crítica que se activa cuando la temperatura excede el límite programable crítico. Su rango de
funcionamiento es entre -10 ºC y 64 ºC con una desviación de ±1.5 ºC, y una temperatura
crítica de 80 ºC. Su tensión de trabajo es de 3 V a 5.5 V, con corrientes entre 250 µA y 500
µA [29].
También hay sensores de temperatura que funcionan como transductores constituidos por
dos alambres que desarrollan entre si una fuerza electro-motriz (f.e.m.) en función de las
diferencias de temperatura entre sus uniones, llamado termopar o termocupla. Es muy
utilizado en aplicaciones en las que se necesita medir temperaturas en un rango muy
amplio, desde 80 ºC hasta 1800 ºC, que con aleaciones especiales pueden llegar a medir
hasta temperaturas superiores a los 3000 ºC [33].
Puesto que el termopar es básicamente un dispositivo de medida diferencial, se necesita
una temperatura de referencia conocida para una de las uniones, así la temperatura de la
otra unión será deducida del voltaje de salida. Los termopares están fabricados de
materiales especialmente seleccionados que se han caracterizado exhaustivamente en

24
términos de voltaje con la temperatura de comparación, que normalmente es la del punto de
agua/hielo de 0 °C [33].
Otro tipo de sensor de temperatura es el termistor conformado por un material
semiconductor que posee un coeficiente de temperatura de resistencia negativo de valor
elevado, por lo que presenta variaciones rápidas y extremadamente grandes para los
cambios relativamente pequeños en la temperatura. Se fabrican con óxidos de níquel,
manganeso, hierro, cobalto, cobre, magnesio, titanio y otros metales, y están encapsulados
en sondas y en discos [32].
Éste tipo de sensor de temperatura tiene un bajo costo y amplio rango de medida, además
es fácil de conseguir, pero desde el punto de vista de funcionamiento, no es recomendable
en aplicaciones que requiere de una medida exacta de la temperatura ya que sufre de no
linealidad, dificultando la adquisición de datos y su calibración [33].
Los sensores de temperatura de silicio entran en la categoría de semiconductores,
conformado por un Circuito Integrado (IC) que puede contener un circuito de procesamiento
de la señal que se encargue de la compensación de la unión fría o de la linealización dentro
del mismo (circuito de acondicionamiento de la señal). Estos sensores inician sus
aplicaciones en la protección de los componentes electrónicos de computadoras, discos
duros, cargadores de batería, pantallas LCD, que se pueden dañar por las altas y bajas
temperaturas con ventajas como su tamaño, su exactitud y su costo [32].
1.4.3. Sensores de humedad.
La humedad es un fenómeno natural, que se presenta a nivel molecular y se encuentra
básicamente relacionada con la cantidad de moléculas de agua presentes en una
determinada sustancia, la cual puede estar en estado sólido o gaseoso [34].
Una humedad excesiva puede afectar los circuitos, y también a la mecánica de un
dispositivo. Por esta razón se deben tener en cuenta una variedad de sensores de humedad
disponibles, algunos integrados con diferentes niveles de complejidad y prestaciones [35].
Existen varios principios de funcionamiento de los sensores de humedad. Uno de ellos es
por deformaciones. La idea de este tipo de sensores es aprovechar los cambios en las
dimensiones que sufren ciertos tipos de materiales en presencia de la humedad. Los más
afectados son algunas fibras orgánicas y sintéticas en donde al aumentar la humedad

25
relativa las fibras aumentan de tamaño, luego esta deformación debe ser amplificada y debe
ser graduada de acuerdo a la proporcionalidad con la humedad relativa [34].
Otro método es por medio de sensores electrolíticos que se basan en el principio de
descomposición por electrólisis de una molécula de agua, cuando esto ocurre se liberan dos
electrones por molécula, la idea entonces es producir la electrólisis de las moléculas de
agua presentes en el gas y medir la corriente que se genera cuando aquello ocurre [34].
También existe otro fenómeno físico por medio del cual una superficie cualquiera en
presencia de una mezcla gaseosa con vapor de agua, siempre tendrá cierta cantidad de
moléculas de agua presentes en dicha superficie. La presencia de agua permite que a
través de la superficie circule una corriente, en este principio se basan los sensores por
conductividad [34].
Uno de los más utilizados en la industria y la meteorología es el sensor de humedad
capacitivo por su fácil producción, bajos costos, y alta fidelidad. El principio en el cual se
basa este tipo de sensores es el cambio que sufre la capacidad de un condensador al variar
la constante dieléctrica del mismo [34].
Para la selección del sensor más adecuado en un dosificador electrónico se toma en cuenta
principalmente el tamaño y su costo. El valor obtenido de porcentaje de humedad no
requiere ser tan preciso, por lo que no es un factor de selección relevante debido a la
aplicación que se le va a dar.
1.5. Dispositivos actuadores
Un actuador es un dispositivo inherentemente mecánico cuya función es proporcionar fuerza
para mover o “actuar” otro dispositivo mecánico. La fuerza que provoca el actuador proviene
de tres fuentes posibles: presión neumática, presión hidráulica y fuerza motriz eléctrica
(motor eléctrico o solenoide), dependiendo del origen de la fuerza el actuador se denomina
“neumático”, “hidráulico” o “eléctrico” [36].
1.5.1. Electroválvulas.

26
Son mecanismos que están constituidos de un solenoide y una válvula. El solenoide se
encarga de convertir la energía eléctrica en energía mecánica para actuar sobre la válvula,
en algunas electroválvulas el solenoide actúa directamente sobre la válvula proporcionando
toda la energía necesaria para vencer la fuerza del muelle y abrir la válvula [37].
Existen electroválvulas biestables que utilizan un solenoide para abrir y otro para cerrar el
conducto o con un solo solenoide que abre o cierra con un impulso eléctrico [37].
Normalmente se encuentran disponibles en dos estados, cuando permanecen abiertas
mientras el solenoide no recibe un impulso eléctrico se consideran normalmente abiertas
(NA), en cambio cuando se mantienen cerradas mientras el solenoide no recibe un impulso
eléctrico se denominan normalmente cerradas (NC).
1.5.2. Bombas peristálticas.
En los métodos de dosificación de líquidos, este es uno de los dispositivos actuadores más
usados, ya que emplea diversas técnicas de dosificación como volumétrica o con regulación
de flujo, entre otras. Hay dos formas de bombeo con este tipo de bombas: a velocidad fija o
a velocidad regulable, y disponen de varios tipos de cabezas de bombeo con ajustes de
oclusión, para usos de distintas clases de tubos o para uso de varios tubos simultáneamente
con presiones variables y fijas [3].
Estas bombas solucionan los problemas de movimiento de fluidos en la industria química,
alimenticia, farmacéutica, galvanoplastia, tratamientos de agua, industria láctea, industria
plástica, de cosméticos, entre otras. Ya que el fluido que circula a través de la bomba para
ser dosificado solo entra en contacto con el tubo y ninguna otra parte mecánica, por ende se
asegura un bombeo libre de contaminaciones [3].
Son muy convenientes al momento de utilizar materiales corrosivos o abrasivos que
atacarían las partes mecánicas de otros tipos de bombas [3].
Es de gran importancia seleccionar adecuadamente el tubo por el que va a circular el
compuesto, ya que dependería mucho de su diámetro, por ejemplo, para que circule
perfectamente a través de él un compuesto viscoso.

27
1.6. Módulo central de procesamiento
Es la parte de hardware del dispositivo donde se crea la programación para los algoritmos
de control y adquisición de datos de sensores, incluyendo todo el procesamiento en un único
programa en un microcontrolador. Además lo conforman un CPU, una memoria, y unidades
de entrada y salida (E/S).
1.6.1. Plataforma de hardware y software libre Arduino.
Es una plataforma de prototipos electrónicos de código abierto (Open-source) basada en
hardware y software flexibles y fáciles de usar. En su circuito impreso contiene un
microcontrolador de la marca Atmel que cuenta con entradas y salidas analógicas y digitales
en un entorno de desarrollo basado en el lenguaje de programación Processing [38]. En la
actualidad algunas plataformas Arduino cuentan con otros microcontroladores como por
ejemplo Cortex M3 de ARM, de 32 bits [39].
Para facilitar su uso y programación se desarrolló simultáneamente y conjuntamente con la
plataforma Arduino un IDE (Entorno de Desarrollo Integrado). El IDE permite editar, compilar
y enviar el programa a la plataforma Arduino que se esté utilizando, así como comunicarse
vía serie y mostrar los datos en una ventana terminal. La plataforma Arduino se comunica
con el IDE mediante un programa cargador (bootloader), precargado en el microcontrolador
de la plataforma Arduino [39].
Entre sus aplicaciones está la lectura digital o analógica de sensores, implementación de
alarmas, sistemas de luces, funcionamiento con actuadores como motores o electroválvulas,
sistemas de comunicaciones, entre otros. Una de las principales características de Arduino
es la simplificación del proceso de trabajo con microcontroladores, lo cual conlleva a que
ofrezca algunas ventajas y características respecto a otros sistemas [38].
1.6.2. Arduino Mega 2560.
El Arduino Mega 2560 está basada en el microprocesador Atmega 2560. Tiene 54
entradas/salidas digitales (de las cuales 15 pueden utilizarse para salidas PWM), 16
entradas analógicas, 4 UARTs (Puertos Serie por Hardware), un oscilador de 16 MHz, una
conexión USB, entrada de corriente, conector ICSP y botón de reset [40].

28
La Mega 2560 difiere de su versión anterior ya que no utiliza el chip controlador de USB a
serial FTDI. En su lugar ofrece el Atmega 16U2 programado como convertidor USB a serie
[40].
1.7. Módulo de interfaz de usuario
La interfaz de usuario es el medio por el cual el usuario puede comunicarse con una
máquina, un equipo o una computadora, y comprende todos los puntos de contacto entre el
usuario y el equipo. Normalmente suelen ser fáciles de entender y fáciles de accionar.
Las interfaces básicas de usuario son aquellas que incluyen elementos como menús,
ventanas, teclado, ratón, sonidos y en general, todos aquellos canales por los cuales se
permite la comunicación entre el ser humano y la computadora. La mejor interacción
humano-máquina a través de una adecuada interfaz que le brinde comodidad y eficiencia.
Dentro de las interfaces de usuario (UI) se puede distinguir básicamente tres tipos:
- Una interfaz de hardware, a nivel de los dispositivos utilizados para ingresar,
procesar y entregar los datos: teclado, ratón y pantalla de visualización.
- Una interfaz de software, destinada a entregar información acerca de los procesos y
herramientas de control, a través de lo que el usuario observa habitualmente en la
pantalla.
- Una interfaz de Software-Hardware, que establece un puente entre la máquina y las
personas, permitiendo a la máquina entender la instrucción y al hombre entender el
código binario traducido a información legible.
1.7.1. Pantallas táctiles.
Una pantalla táctil es un panel de visualización que al ejercer un contacto directo sobre su
superficie permite la entrada de datos y ejecución de órdenes al módulo central de control.
Además, actúa como periférico de salida mostrando resultados obtenidos de procesos, de
esta manera la pantalla táctil puede operar como periférico de entrada y de salida de datos
[37].

29
Un tipo de pantalla táctil consiste en un cristal transparente donde se sitúa una lámina que
permite al usuario interactuar directamente sobre esta superficie, utilizando un proyector
para lanzar la imagen sobre la pantalla de cristal [37].
Hay diferentes tecnologías que sirven de base para el funcionamiento de las pantallas
táctiles como: resistivas, de onda acústica superficial, capacitivas, de galgas
extensiométricas, de imagen óptica, de diodos emisores de luz infrarroja, con tecnología de
señal dispersa y con reconocimiento de pulso acústico [37].
1.8. Estándares de protección IP y NEMA
Las máquinas diseñadas, deben cumplir con ciertos estándares que aseguren su
funcionamiento y permitan a la gente saber hasta dónde pueden llegar en su utilización.
Para saber si un equipo, tal como un dosificador, un indicador de peso, o un monitor son los
adecuados para una aplicación que funcionará bajo ciertas condiciones, es necesario revisar
sus especificaciones mecánicas donde generalmente encontraremos grados IP, NEMA o
IEC [5].
El sistema de clasificación IP (Ingress Protection) proporciona un medio de clasificar el
grado de protección de sólidos (como polvo) y líquidos (como agua) que el equipo eléctrico y
gabinetes deben reunir. Sin embargo, no definen la protección contra el riesgo de explosión,
ni tampoco la protección ambiental (por ejemplo, de la humedad, atmósferas corrosivas o
fluidos, moho y hielo, entre otros) [5]. El sistema es reconocido en la mayoría de los países y
está incluido en varios estándares, incluyendo el IEC 60529.
NEMA (National Electrical Manufacturers Association) es un conjunto de estándares creado,
como su nombre lo indica, por la Asociación Nacional de Fabricantes Eléctricos de los
Estados Unidos [5]. Los estándares más comúnmente encontrados en las especificaciones
de los equipos son los siguientes:
NEMA 4. Sellado contra el agua y polvo. Los gabinetes tipo 4 están diseñados
especialmente para su uso en interiores y exteriores, protegiendo el equipo contra
salpicaduras de agua, filtraciones de agua, agua que caiga sobre ellos y condensación
externa severa. Son resistentes al granizo pero no a prueba de granizo (hielo) y deben tener
ejes para conductos para conexión sellada contra agua a la entrada de los conductos y
medios de montaje externos a la cavidad para el equipo [41].

30
NEMA 4X. Sellado contra agua y resistente a la corrosión. Los gabinetes tipo 4X tienen las
mismas características que los tipo 4, además de ser resistentes a la corrosión [41].
NEMA 12. Uso industrial. Un gabinete diseñado para usarse en industrias en las que se
desea excluir materiales tales como polvo, pelusa, fibras y filtraciones de aceite o líquido
enfriador [41].

CAPITULO II
2. METODOLOGÍA Y ELEMENTOS

32
2.1. Metodología
Para el desarrollo del proyecto se empleó un enfoque empírico-analítico [42], dado que se
transformó un proceso manual a un proceso automático, basado en la integración de
conocimientos y el desarrollo experimental de diferentes dispositivos electrónicos.
2.1.1. Hipótesis.
El dosificador electrónico de bajo costo automatizará el proceso de obtención de químicos
de sanitización de alimentos, disminuirá el tiempo de ejecución del proceso e incrementará
la confiabilidad química y volumétrica del compuesto final.
2.1.2. Descripción del proceso de dosificación en el dispositivo.
El sistema de dosificación se diseña para la utilización de dos químicos diferentes en un
mismo dosificador, con densidades y conductos independientes dentro del dispositivo, por lo
cual el sistema consta con una entrada de agua y una bifurcación para que por medio del
módulo de control se seleccione qué tipo de químico se quiere dosificar enviando la señal
para la apertura de la electroválvula que controla el flujo de agua y para la activación de la
bomba peristáltica que permite el paso del químico hasta el punto donde la tubería que
conduce el químico se une con la tubería que conduce el agua (punto de inyección).
Una vez que se accionan los actuadores del sistema, los sensores de flujo utilizados para el
agua y para el químico, determinan qué caudal fluye en un determinado tiempo y este valor
mediante el algoritmo del sistema de control se va sumando al valor anterior hasta llegar al
requerimiento de dosificación previamente seleccionado por el operario. Los dos químicos
que se suministran en diferentes etapas tienen distinta densidad y viscosidad, por ende, el
tiempo que se demora en dosificar una cantidad determinada de mezcla no es el mismo
para ambos ya que las bombas peristálticas utilizadas tienen la misma capacidad de
bombeo.
En la interfaz de usuario se muestra las cantidades de dosificación previamente
programadas dependiendo de los requerimientos del usuario y estas pueden ser activadas
por medio de botones digitales. Además muestra otras opciones para ver el valor de
temperatura y humedad entregado por los sensores.

33
Las cantidades de mezcla total obtenidas luego de la dosificación son valores fijos, en este
caso se establece dos cantidades que pueden ser seleccionadas según la necesidad del
usuario, para llenar tanques con capacidades volumétricas de 2 galones y de 4 galones.
Para poder conectar todos los dispositivos a la plataforma Arduino Mega 2560 se ha
diseñado un circuito impreso tipo “Shield” con conectores que den la facilidad para cambiar
dispositivos del dosificador en mal estado, de tal forma que puedan ser reemplazados
fácilmente dependiendo de la ubicación de cada parte del dispositivo. Además, este circuito
impreso se utiliza para ubicar los circuitos de acondicionamiento de los sensores y circuitos
diseñados para el correcto funcionamiento de los actuadores que forman parte del
dosificador.
2.1.3. Variables del proceso.
Variables dependientes:
- Periodo de tiempo de activación de la bomba peristáltica 1.
- Periodo de tiempo de activación de la bomba peristáltica 2.
- Periodo de tiempo de activación de la válvula solenoide 1.
- Periodo de tiempo de activación de la válvula solenoide 2.
- Alerta por fugas de agua con el sensor DHT-11.
Variables independientes:
- Caudal de agua (mililitros por segundo) [ml/s].
- Caudal de químico 1 (mililitros por segundo) [ml/s].
- Caudal de químico 2 (mililitros por segundo) [ml/s].
- Volumen a dosificar (Galones) [Gal].
- La densidad del químico que se dosifica.
2.2. Elementos del sistema de dosificación propuesto
En esta sección se describen las características de los dispositivos electrónicos que forman
parte del dosificador, para seleccionar los más apropiados según las especificaciones.

34
Además, se muestra los diagramas de conexiones de cada uno de los dispositivos utilizando
el programa Fritzing, siguiendo el proceso de diseño que se muestra en [43].
2.2.1. Bomba peristáltica YW01-DC12V.
Este tipo de bomba peristáltica está formada por un motor de corriente continua (DC) de 12
V y una cabeza de plástico que utiliza el giro del motor para hacer girar un sistema de
succión como se muestra en la Figura 3. El tubo que rodea a la cabeza de la bomba es el
conducto por el cual es bombeado el químico para su dosificación. En la Tabla 1 se
describen las características técnicas y operativas de este dispositivo, incluyendo
características necesarias para determinar la capacidad de la batería y las dimensiones que
son un factor importante cuando se requiere que el sistema sea en lo posible pequeño. En la
Figura 4 se muestra una imagen de la bomba utilizada.
Para poder alimentar la bomba peristáltica no importa la polaridad, por lo tanto, podemos
conectarla de dos formas, la única diferencia es que el sistema de bombeo puede funcionar
de derecha a izquierda o de izquierda a derecha en el caso de invertir la polaridad de la
fuente de energía.
Figura 3. Funcionamiento de la bomba peristáltica YW01-DC12V [44]. Fuente: Learning About Electronics. Elaboración: Learning About Electronics.
Sus principales características son las siguientes [45]:
- Autocebante.
- Seguro para funcionar en seco.
- Se puede adaptar diferentes diámetros de tubo.
- Se puede adaptar tubo de diferentes materiales.

35
- Diseño compacto.
- Fácil funcionamiento.
Sus aplicaciones son las siguientes [45]:
- Industria médica.
- Industria laboratorista.
- Lavado de vidrios.
- Lavavajillas industriales.
- Maquinarias de alimentos como: máquinas de bebidas o dosificadores.
Figura 4. Bomba peristáltica YW01-DC12V [45]. Fuente: YW-FLUID Technology Company. Elaboración: YW-FLUID Technology Company.
Tabla 1. Especificaciones de la bomba peristáltica YW01-DC12V [45].
Descripción Valor Diámetro externo del tubo de silicona 4 mm
Rango de temperatura de trabajo 0 ºC – 40 ºC Voltaje del motor 12 V
Corriente de consumo 300 mA Tasa de flujo 150 ml/min
Peso 110 gramos Diámetro del motor 27.5 mm
Longitud total 68.2 mm Precisión 1 %
Espesor del tubo utilizado 1-1.2 mm Nivel de ruido <-49 dB
Fuente: YW-FLUID Technology Company. Elaboración: Renato Torres Carrión.

36
Para conectar la bomba peristáltica con el Arduino se utiliza otros dispositivos
semiconductores ya que la bomba funciona con 12 V para entregar la mejor tasa de flujo,
por lo que se requiere conectar una fuente externa de energía, sin embargo, esta puede
funcionar a partir de los 5 V entregando un tasa de flujo muy baja que al momento de pasar
por un sensor de flujo no la detectada, y además el tiempo que se tarda en dosificar es
mayor [44].
Se utiliza un diodo 1N4001 conectado en paralelo con la carga (bomba peristáltica), esto con
la finalidad de proteger el Arduino de la fuerza contra electromotriz que puede producir un
motor repentinamente causando un deterioro del microcontrolador del Arduino por los
aumentos de energía repentinos [44].
Debido a que el Arduino no posee en sus puertos de E/S corriente suficiente para accionar
la bomba peristáltica, se necesita un transistor PN2222 NPN que otorga una amplificación
de corriente, para que sea posible accionarla [44].
La base del transistor se conecta al puerto de E/S seleccionado para encender o apagar la
bomba peristáltica. El transistor permite cerrar el circuito mientras la base recibe la corriente
suficiente para ello. En el puerto de E/S se establecen dos estados, bajo o alto, y se
configuran los tiempos para cada uno de ellos, al cambiar de estado BAJO a estado ALTO,
la base recibe suficiente corriente y el transistor cierra el circuito, luego de esto la bomba
peristáltica se enciende hasta que termine el tiempo y pase de estado ALTO a BAJO. En
este aspecto, se utiliza el Arduino para controlar el paso de corriente hacia el transistor y con
ello tener el control del encendido y apagado de la bomba [44].
En la Figura 5 se muestra el diagrama de conexión de los elementos del circuito y de la
bomba peristáltica, únicamente conectado a una fuente de energía de 5 V proporcionada por
el Arduino.
En la Figura 6 se muestra el diagrama de conexión en protoboard representando todos los
elementos de la conexión con imágenes y figuras, la batería de litio polímero por medio de
una batería de 11.1 V y la bomba peristáltica por medio de un motor DC, conectada la base
del transistor al pin 22 del Arduino.

37
Figura 5. Diagrama de conexión. Fuente: Fritzing. Elaboración: Renato Torres Carrión.
Bombasperistálticas
BATERÍALiPo2200mAh11.1V
Figura 6. Diagrama en protoboard (Bomba peristáltica 1). Fuente: Fritzing. Elaboración: Renato Torres Carrión.

38
Como en el dosificador deben ir conectadas dos bombas peristálticas, una para cada
proceso de dosificación de químico por separado, se conecta otro motor y se crea un
segundo circuito con todos los elementos necesarios descritos anteriormente. En la Figura 7
se muestra la segunda bomba peristáltica para el químico 2 conectada al pin 50 en el
Arduino y a la base de un transistor. La conexión de los dispositivos con los diferentes pines
está organizada de tal forma que la tarjeta de circuito impreso (PCB) sea más pequeña para
optimizar espacio y lograr enrutar mediante pistas de cobre la mayor cantidad de
conexiones.
BATERÍALiPo2200mAh11.1V
Figura 7. Diagrama en protoboard (Bomba peristáltica 2). Fuente: Fritzing.
Elaboración: Renato Torres Carrión.
En el proceso de dosificación no es necesario que el flujo de químico se lleve a cabo
durante todo el tiempo que se suministra el agua, por ello es que no interesa controlar las
rpm del motor, ya que en el recipiente que contiene la mezcla los componentes se
combinan. Sin embargo, es preferible que el sistema de bombeo de químico se active unos
segundos después del paso de agua para evitar que el químico por su densidad quede en el
fondo del recipiente, evitando que esto provoque retrasos hasta que el químico se disuelva
en toda el agua.

39
2.2.2. Electroválvula FPD-270A.
Es una electroválvula de dos vías, normalmente cerrada que funciona con una fuente de
energía de 12 V, sin embargo, puede funcionar a partir de 6 V. El conducto del líquido es de
plástico, por lo que no es utilizado para agua a altas temperaturas, sin embargo, soporta
hasta 75 ºC. Dentro del conducto posee una malla de aluminio que evita el ingreso de
elementos que puedan dañar el sistema. En la Figura 8 se muestra la electroválvula
utilizada.
Figura 8. Electroválvula FPD-270A [46]. Fuente: Zhejiang KeBo Electrical Appliances Co.Ltd. Elaboración: Zhejiang KeBo Electrical Appliances Co.Ltd.
En la Tabla 2 a continuación se describen las características técnicas y dimensiones de la
electroválvula, así también el tiempo de vida útil basado en el número de ciclos de
funcionamiento, mientras que en la Tabla 3 se muestra el consumo de corriente en función
del voltaje aplicado a la electroválvula. Cabe mencionar que se busca ahorrar energía en el
sistema ya que la fuente de energía es una batería.
Tabla 2. Especificaciones de la Electroválvula FPD-270A [46].
Característica técnica Valor
Diámetro del tubo ½” Presión de trabajo 0,02 MPa – 0,8 MPa
Temperatura de trabajo 1 ºC – 75 ºC Tiempo de respuesta (apertura) ≤ 0,15 segundos
Tiempo de respuesta (cierre) ≤ 0,3 segundos Voltaje de funcionamiento 12 V (funciona a partir de 6 V)
Número de accionamientos ≥ 50 millones de ciclos Peso 121 gramos
Dimensiones 3” x 2,25” x 2” Fuente: Zhejiang KeBo Electrical Appliances Co.,Ltd. Elaboración: Renato Torres Carrión.

40
Tabla 3. Consumo de corriente en función del voltaje de alimentación de la electroválvula FPD- 270A [46].
Voltaje Consumo de corriente
6 V 160 mA 7 V 190 mA 8 V 220 mA 9 V 240 mA
10 V 270 mA 11 V 300 mA 12 V 320 mA
Fuente: Zhejiang KeBo Electrical Appliances Co.,Ltd. Elaboración: Renato Torres Carrión. Para que la electroválvula funcione correctamente debido a que un solenoide representa
una carga inductiva tenemos que incluir un diodo de protección entre sus bornes,
denominado diodo amortiguador de señal que ayuda a eliminar las tensiones transitorias
causadas cuando una bobina magnética (como las que se encuentran en un motor, relé o
solenoide) pierde su alimentación. Sin este diodo los picos de voltaje transitorios pueden
dañar otros elementos del circuito. El amortiguador se coloca del lado negativo de la bobina
hacia el lado positivo. Gracias a que los diodos sólo permiten que la corriente fluya en la
dirección que necesitamos, nos aseguramos de obtener un buen funcionamiento, de lo
contrario se produce un cortocircuito entre alimentación y tierra [47].
El consumo de corriente de este solenoide es mayor que lo que un transistor estándar
puede manejar, por ello se utiliza un transistor Darlington TIP120, que son en realidad 2
transistores, que actúan como un único transistor con una alta ganancia de corriente [47]. El
pin de salida sigue siendo el mismo que un transistor estándar, de modo que se lo trata
como un transistor con una corriente nominal superior.
También se debe utilizar un resistor de base denominado así porque se coloca en el pin de
la base del transistor. Esta resistencia limita la corriente que pasa a la base (línea de control)
del transistor, sin este dispositivo no habría límite de corriente [47]. Entonces, el resistor se
conecta a una de las salidas del Arduino para enviar una señal digital que determina el
estado de la electroválvula entre dos posibles: abierta o cerrada.
En la Figura 9 se muestra el diagrama de conexión de los elementos del circuito y de la
electroválvula, conectada a una fuente de 12 V proporcionada por la batería.

41
Figura 9. Diagrama de conexión de la válvula solenoide. Fuente: Fritzing. Elaboración: Renato Torres Carrión.
Debido a que el sistema de dosificación consta de dos químicos que se dosifican de forma
separada, se requiere la implementación de dos válvulas solenoides que funcionen de forma
independiente ya que ambos químicos se pueden dosificar por separado sin requerir del
mismo dispositivo para hacerlo. En la Figura 10 y 11 se muestra el diagrama en protoboard
de la conexión de las válvulas solenoides, la que está destinada para el químico 1 que se
conecta al pin 24 del Arduino y a la base del transistor TIP120, mientras que, la que funciona
con el químico 2 está conectada al pin 52 del Arduino.
BATERÍALiPo2200mAh11.1V
Figura 10. Diagrama en protoboard de la válvula solenoide para el químico 1. Fuente: Fritzing. Elaboración: Renato Torres Carrión.

42
BATERÍALiPo2200mAh11.1V
Figura 11. Diagrama en protoboard de la válvula solenoide para el químico 2. Fuente: Fritzing, Elaboración: Renato Torres Carrión.
2.2.3. Sensor de flujo YF-S201.
El YF-S201 es un sensor de flujo constituido por un cuerpo de plástico, un rotor, y un sensor
de efecto Hall [29], [48].
Utiliza un sensor primario tipo molinete, con aspas o álabes para medir la cantidad de líquido
que se ha movido a través de él. El molinete tiene en el mismo eje un pequeño imán y hay
un sensor magnético de efecto Hall en el otro lado del tubo que registra cada vuelta
generando impulsos de salida a una velocidad proporcional a la velocidad de flujo [48].
El efecto Hall es el resultado de una diferencia de tensión a través de un conductor eléctrico
transversal a una corriente eléctrica en el conductor y un campo magnético perpendicular a
la corriente [49]. La flecha inscrita en el sensor indica la dirección del flujo.
El dispositivo consta de tres cables de conexión (ver Figura 12), el rojo es el cable de
alimentación que va conectado a 5 V del Arduino, el cable negro es el de tierra que va
conectado directamente a cualquiera de los pines de tierra que dispone el Arduino y el
amarillo es el cable de señal que va conectado a una de las entradas digitales que disponga
de interrupción, que es una función que disponen algunos puertos de E/S de interrumpir la
operación normal del microcontrolador para realizar otra operación [48]. Cuando un evento

43
dispara una interrupción, la ejecución normal del microcontrolador se suspende
(ordenadamente para poder volver) y salta a ejecutar una función especial que llamamos
Interrupt Service Handler o ISH (Servicio de gestión de interrupción) [50].
Figura 12. Sensor de flujo YF-S201 [49]. Fuente: T. K. Hareendran. Elaboración: T. K. Hareendran.
En la Figura 13 se muestra la conexión del sensor de flujo de agua con el puerto de E/S que
dispone de la función de interrupción, una de las razones por las que se escogió la
plataforma de hardware Arduino Mega 2560, además de las funciones y características
especificadas en el capítulo anterior, es por el número de puertos que disponen de la
función de interrupción, ya que no solo se requiere uno de estos, sino que se requiere uno
por cada sensor de flujo que esté incorporado en el sistema, y en este caso particular, el
dispositivo estará integrado de 3 sensores de flujo, uno para el flujo de agua y dos para cada
uno de los químicos dispensados.
Para su funcionamiento se requiere valores entre 10 mA y 20 mA, que pueden ser
entregados por el puerto de Voltaje de salida de 5 V del Arduino, sin que sea necesaria una
conexión de alimentación directamente entre el sensor y la batería. Las características más
relevantes de éste dispositivo se describen en la Tabla 4, donde se incorpora además el
número de ciclos de funcionamiento del dispositivo sustentado por el fabricante. Además, un
dato importante según la hoja de datos del fabricante, es que por cada litro de agua que
pasa por el sensor obtenemos aproximadamente 450 pulsos.

44
Figura 13. Diagrama de la conexión del sensor de flujo YF-S201. Fuente: Fritzing. Elaboración: Renato Torres Carrión.
Tabla 4. Características del sensor de flujo YF-S201 [48].
Modelo YF-S201 Corriente < 15 mA
Salida Nivel alto del pulso de salida: ≥ 4.6 V Nivel bajo del pulso de salida: ≤ 0.5 V
Sensor primario Molinete de 8 álabes Sensor secundario Efecto Hall Voltaje de trabajo 5 V - 18 V
Máxima corriente de trabajo 15 mA a 5 V Rango de entrada 1 – 30 l/min
Rango de Temperatura de trabajo -25 a +80 ºC Rango de Humedad de trabajo 35 % - 80 % RH
Precisión ±2 % Posición de operación Vertical
Presión máxima de trabajo 2 MPa Ciclo de trabajo de salida 50 % ± 10 %
Tiempo de subida de la señal de salida 0.04 us Tiempo de bajada de la señal de salida 0.18 us
Pulsos por litro 450 Tiempo de vida útil Mínimo 300000 ciclos
Frecuencia de caudal f (Hz) = 7.5 * Q (l/min)
Fuente: Departamento de Ciencia de la Energía y Mecánica, ESPE. Elaboración: Renato Torres C. Un aspecto importante que debe ser mencionado es el diámetro de la tubería por la cual
pasa el agua, y es que todos los dispositivos que formen parte del trayecto que siga el flujo

45
de agua por el sistema de dosificación deberán tener un diámetro de ½ pulgada con la
finalidad de mantener un flujo constante, evitar fugas y disminuir el tamaño del dispositivo.
2.2.4. Sensores de flujo YF-S401.
Es un sensor de flujo utilizado para aplicaciones de pequeña dosificación (ver Figura 14), ya
que su principal característica es que su flujo de trabajo parte desde los 0,3 l/min hasta los 6
l/min, lo que lo hace ideal para aplicaciones donde se busca dosificar pequeñas cantidades
de líquido con velocidades de flujo bajas, como las obtenidas por las bombas peristálticas
que bombean el químico hasta el punto donde se mezcla con el agua [51].
Consiste en un cuerpo de plástico, un rotor de agua y un sensor de efecto Hall. Usa un
sensor con aspas para medir la cantidad de líquido que se ha movido a través de él, estas
poseen un pequeño imán y un sensor magnético de efecto Hall que graba cada vuelta de las
aspas, generando impulsos de salida a una velocidad proporcional a la velocidad de caudal
[48]. Su diseño y el funcionamiento son similar al sensor de flujo YF-S201 a diferencia de los
adaptadores que posee para conexión de manguera de silicona.
Figura 14. Sensor de flujo YF-S401 [51]. Fuente: ThingNovation. Elaboración: ThingNovation.
En la Tabla 5 se describen las características técnicas y eléctricas del sensor, incluyendo el
flujo de trabajo, siendo una de las características más importantes por el rango de valores
de l/min que se puede sensar.

46
Tabla 5. Características del sensor de flujo YF-S401 [51].
Modelo YF-S401
Voltaje 5 V – 18 V
Corriente 10 mA
Máxima presión soportada 1,75 MPa
Flujo de trabajo 0.3 l/min - 6 l/min
Humedad máxima operativa 35 % - 90 % RH
Diámetro de los conectores 7mm
Temperatura de funcionamiento -25 ºC – 80 ºC
Dimensiones 57 mm x 40 mm x 27 mm
Frecuencia de caudal f (Hz) = 4.5 * Q (l/min) Fuente: www.thingnovation.com. Elaboración: Renato Torres Carrión. En las Figuras 15 y 16 se muestra los diagramas de conexiones de los sensores YF-S401
para el químico 1 y 2, la diferencia entre ellos radica en el pin de señal al que va conectado
cada sensor.
Figura 15. Conexión del sensor de flujo YF-S401 para el químico 1. Fuente: Fritzing. Elaboración: Renato Torres Carrión.

47
Figura 16. Conexión del sensor de flujo YF-S401 para el químico 2. Fuente: Fritzing. Elaboración: Renato Torres Carrión.
2.2.5. Sensor de humedad y temperatura DHT-11.
Los sensores DHT11 y DHT22 son los más básicos y los más utilizados para implementarlos
con Arduino, estos sensores están compuestos en dos partes, un sensor de humedad
capacitivo y un termistor, también constan de un circuito integrado básico en el interior que
hace la conversión de analógico a digital y este envía una señal digital con la temperatura y
la humedad [52].
En la Figura 17 se muestra la conexión de éste sensor y el pin del Arduino al que está
conectado la señal de salida del sensor.
Éste sensor es una de las mejores opciones para diversas aplicaciones debido a su tamaño
y a su bajo consumo de energía. Cada uno de sus elementos están estrictamente calibrados
en un laboratorio de alta exactitud sobre la calibración de humedad [52].
Cabe señalar que para esta aplicación no se requiere un sensor con alta resolución. Es
suficiente la utilización de un sensor con resolución de 1 %RH (ver Tabla 6), ya que el
motivo principal de su uso es detectar una fuga dentro del sistema y para ello se consideran
valores críticos [52].

48
Figura 17. Diagrama de conexión del sensor humedad y temperatura DHT-11. Fuente: Fritzing. Elaboración: Renato Torres C.
Tabla 6. Especificaciones técnicas del sensor DHT-11 [52].
Parámetros Condiciones Mínimo Típico Máximo
Resolución Humedad
1 % RH
1 % RH (8 Bits)
1 % RH (8 Bits)
Rango de mediciones
0 � 30 % RH 90 % RH 25 � 20 % RH 90 % RH 50 � 20 % RH 80 % RH
Estabilidad a largo plazo ±1 % RH/año
Resolución temperatura 1 �
8 bits 1 � 8 bits
1 � 8 bits
Rango de medición 0 � 50 �
Fuente: http://www.micropik.com/PDF/dht11.pdf. Elaboración: Renato Torres Carrión.
Éste sensor funciona con una fuente de energía de entre 3 V y 5.5 V de corriente continua,
además se puede añadir un capacitor de 100 nF entre el pin de voltaje y de tierra con la
finalidad de crear un filtro de potencia. En la Tabla 7 se muestra las características eléctricas
del sensor [52].

49
Tabla 7. Características eléctricas del sensor DTH-11 [52].
Condiciones Mínima Típica Máxima Voltaje de alimentación DC 3 V 5 V 5.5 V
Corriente de consumo Medición 0.5 mA 2.5 mA
Corriente de consumo medio
Medición 0.2 mA 1 mA
Corriente de consumo en Standby
Medición 100 uA 150 uA
Fuente: http://www.micropik.com/PDF/dht11.pdf. Elaboración: Renato Torres Carrión. El pin de datos necesita un resistor de pull-up de 5 kΩ para que la conexión con el Arduino
se realice como se muestra en la Figura 18.
Figura 18. Conexión del sensor DHT-11 [53]. Fuente: M. Prosseda. Elaboración: M. Prosseda.
Cuando se conecta el sensor a una fuente de energía, en éste caso un pin de salida de 5 V
del Arduino, no es necesario enviar una instrucción para que éste sea activado. Una vez
conectado se mantiene en modo standby hasta reconocer una señal de inicio que consiste
en un nivel bajo de voltaje durante 18 ms seguido de una elevación de tensión durante
aproximadamente 40 μs esperando la transmisión de los datos [53].
Luego se genera un cambio de nivel bajo a nivel alto de 80 μs para iniciar el envío de datos,
y cada bit diferente enviado tendrá una duración determinada, luego regresa a modo
standby. Este ciclo se repite cada vez que el sensor quiere leer un dato. Una transmisión de
datos completa es de 40 bits, por lo que un proceso de comunicación se tarda
aproximadamente 4 ms [53].

50
2.2.6. Panel solar policristalino.
Los paneles solares que se proponen a futuro para su implementación en dispositivo
dosificador son de tipo policristalino. Tienen algunas características eléctricas importantes y
de relevancia como por ejemplo la potencia que generan, máximo 2.5 W a 18 V, lo que los
hace ideales para alimentar un sistema de 12 V, pero además otro aspecto importante es su
tamaño. En la Figura 19 se muestra una imagen del panel solar seleccionado.
Figura 19. Panel solar policristalino 18 V 2.5 W [54]. Fuente: Baoji HaoYu Hitech Machine Engineering Co., Ltd. Elaboración: Baoji HaoYu Hitech Machine Engineering Co., Ltd.
En la Tabla 8 se muestran las principales características eléctricas de éstos paneles solares,
así también sus dimensiones consideradas factor importante para la ubicación del mismo.
Tabla 8. Características eléctricas [54].
Especificación Valor
Potencia 2.5 W
Voltaje de salida 18 V
Corriente de salida 140 mA
Tipo de panel Policristalino
Tamaño 194 mm x 120 mm x 3 mm
Peso 70 g
Fuente: Baoji HaoYu Hitech Machine Engineering Co., Ltd. Elaboración: Renato Torres Carrión

51
2.2.7. Batería Li-Po Floureon 2200 mAh 3s.
La carga total del sistema determina en gran parte la capacidad que debe tener la batería
para poder entregar corriente a todos los dispositivos conectados, además una
característica importante que debe tener una batería Li-Po para un sistema de dosificación
es su voltaje, en este caso 11.1 V (ver Tabla 9), considerado suficiente para alimentar todo
el sistema, esto gracias a que por sus características electro-químicas, el valor de voltaje
cuando está completamente cargada es de 1.5 V más que el descrito anteriormente. Sin
embargo, el valor mínimo de voltaje recomendado al que puede llegar este tipo de batería
estaría entre los 10.1 – 10.5 V, más allá de estos valores la batería puede sufrir daños y su
tiempo de vida útil se reduce considerablemente.
En la Figura 20 se muestra la batería que se utilizará en el dispositivo dosificador. Gracias a
los diferentes tipos de conectores que posee para su descarga, esta puede ser conectada
simultáneamente en diferentes puertos, considerando que el único puerto de carga es el que
posee el conector JST-XH.
Figura 20. Batería Fluoreon 2200 mAh 3s [55]. Fuente: www.amazon.com Elaboración: Renato Torres Carrión
Tabla 9. Características técnicas de la batería Fluoreon 2200 mAh 3s [55].
Especificación Valor
Tipo de batería Litio-Polímero
Tasa de descarga 8 C
Número de celdas 3 S
Voltaje 11.1 V
Capacidad 2200 mAh

52
Conector de carga JST-XH
Dimensiones 97,79 mm - 29,97 mm - 20,06 mm
Peso 109,99 g
Fuente: http://www.floureon.com/. Elaboración: Renato Torres Carrión.
2.2.8. LCD Touch Shield 2.8” 61505v.
Es una pantalla LCD multicolor compatible con Arduino (ver Figura 21), que incluye una
ranura para tarjeta microSD para almacenar datos, y dos controladores DP74HC245 (Ver
tabla 10) que funciona de la misma manera que el ILI9325 [56] y dispone de una librería
para su funcionamiento en las principales plataformas de hardware de Arduino como la Uno
y la Mega con 8 bits de datos e interfaz de control de 4 bits [57].
Figura 21. LCD Touch Shield 2.8” 61505v.
Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
Su pantalla es de tipo resistiva y tiene un tamaño de 2.8 pulgadas, lo que la hace suficiente
para aplicaciones puntuales en las que no se requiera un mayor tamaño de pantalla. Está

53
construida a manera de Shield para Arduino ya que no requiere de ninguna conexión extra
además de los pines dispuestos para coincidir con el Arduino como se muestra en la Figura
22 [57].
AREFGND
SD_SCKSD_DOSD_DISD_SSLCD_D1LCD_D2LCD_D7LCD_D6LCD_D5LCD_D4LCD_D3LCD_D2
RESET3V5V
GNDGND
LCD_RDLCD_WRLCD_RSLCD_CS
LCD_RST
Figura 22. Conexión Arduino Mega con LCD Touch Shield 2.8” 61505v. Fuente: Fritzing. Elaboración: Renato Torres Carrión.
Tabla 10. Especificaciones técnicas LCD Touch Shield 2.8” 61505v [57].
Tamaño 2.8 pulgadas
Voltaje de funcionamiento 3.3 V o 5 V
Consumo de corriente 250 mA
Resolución 240 x 320, 18 bits (262.000 colores)
Pines utilizados Pines digitales y analógicas 5-13 0-3
Tipo de pantalla Resistiva
Controladores DP74HC24
Fuente: RobotShop. Elaboración: Renato Torres Carrión.

CAPITULO III
3. DISEÑO Y CONSTRUCCIÓN DEL SISTEMA

55
En el siguiente capítulo se presenta el diseño del sistema de dosificación, empezando por
los diagramas de procesos e incluyendo los dispositivos que lo conforman con su respectiva
simbología. Por otro lado, se explica el algoritmo utilizado para el funcionamiento del
dosificador mediante flujogramas, el diseño del PCB en el software de diseño y simulación
Proteus, y el circuito impreso. Finalmente se explica el criterio utilizado para determinar la
ubicación correcta de cada dispositivo, se muestra el diseño de la carcasa y cómo se ha
estructurado internamente el dosificador.
3.1. Diagrama unifilar del proceso
En este diagrama se muestra el proceso que sigue el sistema de tuberías que forma parte
del dosificador automático. Por la tubería principal P-2 el agua ingresa y pasa a través del
sensor de flujo, seguidamente el sensor de flujo se conecta con una tubería de ½ pulgada
creando una bifurcación hacia los sistemas de dosificación (P-5 y P-4), para ello se conecta
a las salidas de la bifurcación adaptadores del mismo tipo de tubería con la finalidad de
direccionar al flujo de agua hacia las válvulas solenoides (V-3 y V-4) que disponen en cada
uno de sus extremos ajustes manuales.
Dependiendo del tipo de dosificación que se requiera, se activan las válvulas solenoides,
una a la vez, para permitir el paso de agua por P-7 o P-8. Por otro lado las bombas,
conectadas con uno de sus extremos a los recipientes que contienen el químico (P-13 y P-
14) y el otro conectado a la salida de las válvulas solenoides (P-9 y P-10), bombean el
químico a través de una tubería pasando por los sensores de flujo hacia el punto de
inyección, luego se colocó en la salida del dispositivo dosificador otro tipo de tubería que
dispone en uno de sus extremos un adaptador que dirige la mezcla obtenida por P-15 o P-
16 hacia el recipiente dispuesto para ser llenado (E-7 o E-8).
En la Figura 23 se muestra el diagrama unifilar de todo el sistema de dosificación,
representando cada uno de los dispositivos que van conectados con el sistema de tuberías
por medio de figuras con sus nombres. La secuencia de tuberías por donde fluye el agua
esta denominada como P-5, P-4, P-7 y P-8, mientras que la secuencia de tuberías por
donde fluye el químico está descrita con la denominación P-9, P-10, P-11, P-12, P-13 y P-
14. La mezcla obtenida circula a través de P-15 o P-16 hacia los recipientes E-7 o E-8.

56
P-2
P-4P-5
Bomba Bomba
P-7 P-8
Sensordeflujo
P-9 P-10
P-11P-12
E-6E-5QuímicoAzul
Químicorojo
P-13 P-14
P-15 P-16
ConductodeaguaConductodequímico
Válvulasolenoide Válvulasolenoide
V-3 V-4
E-7 E-8
Sensordeflujo Sensordeflujo
PuntodeinyecciónPuntodeinyección
Figura 23. Diagrama unifilar del dosificar automático con tubería de agua de 1/2” y tubería de químico de 1/8”. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
3.2. Diagrama P&ID
En la Figura 24 se muestra el diagrama de tuberías e instrumentación. Para cada uno de los
dispositivos que conforman el sistema de dosificación automático se muestran las
conexiones de señal, conexiones de datos, conexiones de alimentación de 12 V, entre otras.
Cada una representada con diferentes símbolos como se muestra en la parte superior
izquierda de la Figura 24.
Los sensores de flujo disponen de dos tipos de conexiones diferentes, la una está
relacionada con las conexiones hidráulicas de la parte del dosificador por donde pasa el
agua (S-7, S-8 y S-30), mientras que la conexión de señal tiene que ver con los valores

57
enviados por el sensor al microcontrolador del Arduino para determinar la cantidad de agua
que pasa a través de él (S-1, S-12 y S-29).
La conexión de datos representan la información de la interfaz de usuario del dispositivo de
control (S-26) considerando que habrán datos que se envían desde la pantalla hacia el
microcontrolador, por ejemplo cuando se seleccione una opción de dosificación, o del
Arduino a la pantalla cuando se quiera visualizar el valor de un sensor como el de
temperatura o humedad.
Otra conexión que se debe diferenciar es la de energía eléctrica, por lo que algunos
dispositivos requieren alimentación eléctrica de 12 V como en S-14 o S-15, directamente
conectados con la batería, mientras que otros únicamente van conectados a los pines de
salida de voltaje de 3.3 V y 5 V del Arduino, como la interfaz de usuario (I-2).
Además de las conexiones, se muestra la ubicación de los dispositivos dentro del
dosificador. Se determinó que esta es la mejor opción de ubicación de cada uno de ellos,
considerando la trayectoria y recorrido que tiene el agua y el químico una vez que el
dispositivo esta funcionando como también para que se mantenga un tamaño adecuado del
dosificador y conforme a las dimensiones de la carcasa utiliza que se especifica más
adelante.

58
S-24
S-40
S-23
S-7
VálvulaSolenoide
TSensor
I-2
E-3E-4
Bomba Bomba
S-1
S-3S-4
S-5S-6
S-7S-8
S-9
S-10
S-11
S-12
S-13S-14
S-15
LCDTOUCH
ARDUINO
VálvulaSolenoide
S-16
Químicoazul
Químicorojo
ConexióndeseñalConexióndedatos
Conexióneléctrica12V
ConexiónhidráulicadeaguaConexiónhidráulicademezcla
Conexiónhidráulicadequímico
S-26
Conexióneléctricade5V
S-28
Sensordeflujo
S-29
S-12
S-30
Conexióndelgenerador
S-33
S-14
S-34 S-15
Fuentedeenergía
S-38
S-31
V-4
S-2
S-39V-5
S-2
E-11 E-12
PuntodeinyecciónPuntodeinyección
Sensordeflujo
Sensordeflujo
Figura 24. Diagrama de tuberías e instrumentación del dosificador automático. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
3.3. Algoritmo de programación
El algoritmo está estructurado por medio de funciones alojadas en diferentes archivos que
son llamadas por el código principal. En él se declaran todas las variables globales, y en
cada uno de los archivos de las funciones se declaran las variables locales.

59
Para el funcionamiento de la interfaz de usuario se requiere el uso de 3 librerías: una librería
para crear los gráficos, botones y establecer los colores en cada figura que se muestra en la
pantalla, otra librería que incluye los controladores para los chips de los que dispone la
pantalla y la tercera librería encargada de detectar la ubicación de la presión ejercida por el
usuario sobre el panel táctil. Además, se delimita el tamaño estableciendo las coordenadas
de las zonas donde se puede presionar que coinciden con el tamaño de la LCD y se
declaran los colores en el código de programación para poder usarlos refiriéndonos a ellos
con su nombre dentro del programa.
Para graficar y activar un proceso desde los botones en la pantalla LCD se utilizan
condiciones “if” que especifican lo que se debe hacer en caso que el usuario presione en un
lugar de la pantalla. Además, se establece el tamaño del botón, su ubicación según las
coordenadas de la pantalla, el color, la forma y el mensaje que se va a imprimir que es visto
por el usuario y que se encuentra escrito en el botón.
Para el sensor de temperatura y humedad también se utiliza una librería denominada
DTH.h, y en cambio los sensores de flujo utilizan las interrupciones del Arduino Mega para
interrumpir el código que esté corriendo y obtener los datos de los sensores para determinar
el flujo de líquido. Además, para cada acción se crean funciones diferentes dependiendo de
lo que se quiera activar.
Al reconocer la presión ejercida por el usuario sobre la pantalla, éste valor se guarda en una
variable “Z”, y la ubicación se guarda en las variables “X” y “Y” según corresponda. De esta
forma, al ser pulsado un botón, se condiciona toda su área y se ejecuta un proceso. En el
caso del proceso de dosificación, se mide la tasa de flujo de agua y de químico, según
corresponda, en ml/s para luego ir sumando éste valor con el siguiente entregado por el
sensor cada segundo hasta llegar al valor requerido de dosis.
En la Figura 25 se muestra el funcionamiento general del sistema de dosificación por medio
de un flujograma describiendo el proceso que se inicializa en la interfaz de usuario, mientras
que en la Figura 26 se muestra el flujograma del proceso de dosificación para los dos tipos
de químico y todas las opciones que se muestran en la pantalla de la LCD Touch.

60
Seleccionamosunaopcióndedosificación
NoValormedido>=Valorrequerido
Contador=Contador+1
Desactivarsistemadeactuadores
Si
INICIO
DeclararVariablesEstablecerentradas
ysalidas
MostraropcionesLCDTouch
Activarsistemadeactuadores
LeerdatosSensorde
flujo
Si
SeleccionamosTemperatura/Humedad
NoTemperatura(ºC)
Humedad(%RH)
Si
Regresarpantallaprincipal
Actualizardatos
sensorDHT-11
Si
No
No
Figura 25. Flujograma principal del funcionamiento del dosificador. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
LCDTOUCH
X,Y=UBICACIÓNDELBOTÓNAZUL&&
Z!=0
X,Y=UBICACIÓNDELBOTÓNROJO&&
Z!=0
SISTEMADEDOSIFICACIÓNAPAGADO
SISTEMADEDOSIFICACIÓNAPAGADO
SISTEMADEDOSIFICACIÓNENCENDIDO
SISTEMADEDOSIFICACIÓNENCENDIDO
SI SI
NO NO
X,Y=UBICACIÓNDELBOTÓNTEMPERATURA
Z!=0
SINACCIÓN
SI
NO
X,Y=UBICACIÓNDELBOTÓNSALIR
Z!=0
SINACCIÓN
SI
NOX,Y=UBICACIÓNDELBOTÓNHUMEDAD
Z!=0
SINACCIÓN
SI
NO
MOSTRARTEMPERATURA
MOSTRARHUMEDAD
FlowRate1=mldequímico1adosificar
FlowRate2=mldequímico2adosificar
FlowRate1=FlowRate1++
FlowRate2=FlowRate2++
SISTEMADEDOSIFICACIÓNAPAGADO
SISTEMADEDOSIFICACIÓNAPAGADO
NO NO
SI SI
REGRESARALAPANTALLAPRINCIPAL
Figura 26. Flujograma de los procesos mostrados en la interfaz de usuario. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.

61
Para calcular el flujo del agua con el sensor YF-S201 se parte del número de pulsos que se
generan en un segundo por el caudal (Q) o tasa de flujo en l/min. De esta forma se
determina la frecuencia (f) y el número de pulsos en 1 minuto.
f (Hz) = 7.5 * Q (l/min) (1)
f = 7.5 * 30 (l/min)
f = 225 Hz
Del sensor se obtiene un valor de salida de 450 pulsos por un litro de agua que pasa a
través de él en un minuto. Esto significa que si 1 litro de agua fluye a través del sensor en un
minuto, entonces, durante 1 segundo habrá aproximadamente 3.75 pulsos por segundo por
litro de flujo de agua. Por lo tanto el factor de calibración que se debe establecer es de 3.75
[58].
El sensor está conectado al pin 18 del Arduino Mega ya que este cuenta con una
interrupción configurado para disparar en un Falling Edge (de estado alto a estado bajo)
[58].
Dado que el factor de calibración se considera por cada segundo, hay casos en los que el
bucle no se ejecutará en un segundo, y esto provocaría problemas en el cálculo. Para evitar
esto en la ecuación se considera el número de milisegundos que toma la última ejecución
del proceso [58]. Lo cual está dado por la siguiente fórmula:
Q [l/min]= ((1000.0 / (Tiempo de ejecución del programa – tiempo pasado)) * # pulsos) /
Factor de calibración (2)
Gracias a la función “millis” en Arduino se lleva el control de la cantidad de milisegundos
transcurridos desde el comienzo de la ejecución del programa, se detiene a contar cuando la
interrupción está desactivada y devuelve éste valor [58]. Ahora, para obtener el número de
litros de agua que ha fluido a través del sensor por segundo se lo puede hacer dividiendo la
velocidad de flujo para 60 y multiplicando todo este valor por 1000 para obtener los ml/s.
Q [ml/s] = (Q [l/min]) / 60)*1000 (3)

62
El número total de mililitros que se han dosificado desde el inicio de la ejecución del
programa puede ser obtenido mediante la adición de forma acumulativa del caudal obtenido
de cada iteración sumado a su valor anterior [58]. Al principio, el flujo total se inicializa en
cero (Q_Total = 0).
El valor de Flujo en ml/s se mantiene actualizando en función del caudal de agua a través
del sensor por cada segundo. Este valor se registra y se acumula en la variable Q_Total de
tal forma que la cantidad total de agua que ha fluido a través del sensor durante un período
determinado de tiempo puede ser medida, y con esta variable se mantiene encendido un
proceso de dosificación hasta que se llegue a cumplir el valor de Q_Total condicionado [58].
Q_Total = Q_Total + Q [ml/s] (4)
Para los sensores de flujo de químico YF-S401, el funcionamiento es el mismo, la diferencia
radica en el número de pulsos por segundo, que según los datos del fabricante, es de 4.5.
3.4. Integración de los dispositivos y diseño del PCB
Para integrar todos los dispositivos que forman parte del dosificador, se requiere crear una
placa tipo SHIELD para Arduino, en la cual se diseñan los circuitos de acondicionamiento de
cada una de los dispositivos. Además, se disponen los conectores del circuito de carga de la
batería y la pantalla LCD Touch. En la Figura 27 se muestra la conexión de los dispositivos
con el Arduino en protoboard, donde cada dispositivo está representado por una figura con
su nombre, mientras que en la Figura 22 se indicó las conexiones de la pantalla LCD
Touch con el Arduino Mega, teniendo en cuenta que la pantalla puede funcionar únicamente
conectándola a una alimentación de 5 V, siendo opcional la conexión al pin de salida de 3 V
del Arduino.

63
Bombasperistálticas
Solenoides
SensordeflujoYF-S401
SensordeflujoYF-S401
SensordeflujoYF-S201
BATERÍALiPo2200mAh11.1V
DTH_11
Figura 27. Diagrama de conexión en protoboard de los dispositivos. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
Para la elaboración del circuito impreso, se diseñó con la representación en tamaño real de
cada uno de los dispositivos que forman parte del circuito, y con la ubicación que tendrían
los conectores de los sensores, elementos actuadores, batería, etc. La ubicación de los
conectores y el diseño general de todo el Shield es de gran importancia ya que se debe
calcular el espacio que ocupa la pantalla LCD Touch sobre el Arduino y de igual manera la
altura que todo esto integrado llega a tener para que coincida con la altura de la cara
superior de la carcasa con la finalidad de que la pantalla pueda coincidir en el espacio
dispuesto. En la Figura 28 se muestra el diseño del PCB con las pistas de cobre enrutadas
en toda el área de la placa.

64
Figura 28. Diseño de la tarjeta de circuito impreso (PCB). Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
Luego del procedimiento de quemado del circuito sobre una superficie de cobre en una
baquelita, se obtuvo el circuito con las pistas de cobre como se muestra en la Figura 29.
Figura 29. Resultado de la elaboración del circuito impreso. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.

65
3.5. Interfaz de visualización
En la pantalla LCD Touch una vez que se enciende el dosificador se muestra la interfaz de
usuario principal con los botones para activar el funcionamiento del dosificador dependiendo
de la cantidad de mezcla resultante que se quiera obtener. Como se había indicado
anteriormente, las cantidades que están a disposición del usuario son de 2 y 4 galones de
mezcla.
Esta interfaz se muestra independientemente para los dos tipos de químico de sanitización
que se desea dosificar. También se muestra un botón para poder visualizar el valor de los
sensores de temperatura y humedad, mientras la etapa de dosificación de cualquiera de los
dos químicos está desactivada.
El tipo de químico que se quiere dosificar está representado en la interfaz de usuario por
medio de colores, siendo azul el que representa al de desinfección y rojo el que representan
al químico de sanitización ya que tienen una coloración de esa gama, como se observa en la
Figura 30.
Figura 30. Interfaz de visualización del dispositivo dosificador. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
Los botones de activación del dosificador están ubicados uno a cada lado de la pantalla,
respectivamente conforme a la ubicación del químico y tienen una forma circular, mientras

66
que los botones utilizados para ingresar a una nueva pantalla que nos muestra los valores
del sensor de temperatura y de humedad se encuentran ubicados en el centro de la pantalla
dentro de botones con forma rectangular. Una vez dentro de la pantalla que nos muestra los
valores de éstos sensores, se dispone de un botón rectangular para regresar a la pantalla
principal el cual está ubicado en la parte superior izquierda de la pantalla como se puede ver
en la Figura 31.
Figura 31. Pantalla que muestra la temperatura y la humedad relativa. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
3.6. Diseño mecánico
En lo que respecta a la parte mecánica y de ubicación de los dispositivos, se implementa
una pieza de acrílico que embona dentro de la carcasa y dispone de los orificios necesarios
para ajustar los dispositivos con el acrílico. Esta solución se utiliza para evitar el
acoplamiento de soportes y binchas en la carcasa, con la finalidad de que todo el sistema de
dosificación se pueda extraer fácilmente si en algún momento se requiere hacer algún ajuste
o cambio de una pieza o un dispositivo.
Una ventaja que se añade al uso del acrílico es la separación de la parte electrónica y
eléctrica de la parte por donde fluye el agua y la mezcla obtenida, esto con la finalidad de
evitar daños por fugas de líquido que pueden afectar al correcto funcionamiento.
Dispositivos como las electroválvulas y las bombas peristálticas están formadas por una
parte eléctrica y una sección por donde circula un líquido, el objetivo es separar ambas

67
partes creando ambientes diferentes aislados por la lámina de acrílico de 5mm de espesor.
Los orificios que se muestran en la Figura 32 que representa la lámina de acrílico, son los
lugares donde van ubicadas las electroválvulas, bombas peristálticas y el sensor de flujo de
agua YF-S201.
Existen dos ranuras pequeñas por donde ingresan los cables de conexión de los sensores
de flujo YF-S401. También se puede observar que los orificios para las electroválvulas y las
bombas peristálticas se encuentran a la misma altura, debido a que gran parte del espacio
que se encuentra en la parte superior de estos dispositivos está destinado para la ubicación
del módulo central de procesamiento que solo forma parte del sistema electrónico.
Figura 32. Diseño mecánico de la base de acrílico. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
En la cara anterior de la carcasa del dosificador se encuentra una abertura, como se
muestra en la Figura 33, para la ubicación de la pantalla LCD Touch con las dimensiones
correctas para que embone en la carcasa, sosteniéndose en la parte posterior sobre el
Shield conectado con el Arduino.

68
Figura 33. Diseño mecánico de la tapa de la carcasa del dosificador. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
En la Figura 34 se muestran las dimensiones de la carcasa, así también el grosor de las
paredes laterales y el radio de la media circunferencia que se forma en las 4 esquinas de la
carcasa con la finalidad de mejorar el aspecto visual y evitar accidentes para quien la va a
manipular.
Figura 34. Diseño mecánico de la cara posterior y al ancho de la carcasa. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.

69
Otro aspecto importante que se debe considerar en la ubicación del acrílico dentro de la
carcasa es la profundidad hasta la cual debe embonar la lámina para dejar espacio en
ambas áreas. Sin embargo, la tubería por donde fluye la mezcla resultante y el agua que
ingresa al dosificador da soporte a la lámina de acrílico logrando la altura necesaria para dar
suficiente espacio en el área del sistema electrónico. En la cara lateral superior de la
carcasa se dispone un orificio que sirve para la conexión de agua con el dosificador, y en la
cara lateral inferior existen 4 orificios, dos de ellos utilizados para ubicar las tuberías de
salida de la dosis resultante y los otros dos orificios, de menor diámetro, utilizados para el
ingreso del químico a través de la tubería de silicón. En la Figura 35 se muestran las
dimensiones de los orificios, la altura y el ancho de la carcasa.
Figura 35. Diseño mecánico de la cara lateral inferior de la carcasa. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
En la Figura 36 y 37 se muestra el diseño mecánico en 3D de la carcasa y la lámina de
acrílico que embona internamente.

70
Figura 36. Vista en 3D del ensamblaje de las partes de la carcasa. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
Figura 37. Vista 3D de la carcasa. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
3.7. Ensamblaje e implementación del prototipo
Al momento de disponer todos los dispositivos dentro de la carcasa, las bombas peristálticas
se ajustaron a una altura determinada con el acrílico que las sostiene para no tener
problema con las conexiones de las tuberías que conducen el químico hacia la tubería
principal, donde se mezcla con el agua. Sin embargo, otro problema importante fue la
adaptación de la tubería principal con la tubería secundaria (punto de inyección, Figura 38)

71
que requirió de una tubería que tenga como función principal mezclar dos líquidos, con
diámetros diferentes acorde al tubo de la bomba y a la electroválvula.
Para resolver éste problema, se fabricaron adaptadores de tubería galvanizada, tal y como
se muestra en la Figura 38, soldando en uno de sus costados un adaptador del diámetro
indicado para la tubería de la bomba peristáltica, obteniendo la pieza que al momento de
realizar las pruebas pertinentes funcionó como se esperaba.
Figura 38. Punto de mezcla del químico y el agua (punto de inyección). Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
En el trayecto que recorre el agua desde el sensor de flujo YF-S201 hasta las válvulas
solenoides, la tubería no tuvo ningún problema de fugas. Además, en la lámina de acrílico
se hizo coincidir la ubicación de los huecos dispuestos en la lámina con la ubicación de los
dispositivos para que éstos embonen correctamente, con lo cual quedaron dispuesto dentro
de la carcasa como se muestra en la Figura 39.

72
Figura 39. Sección hidráulica del sistema de dosificación. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
En la Figura 40 se puede ver la ubicación de cada uno de los dispositivos electrónicos que
se encuentran en la sección superior de la carcasa, separada del sistema hidráulico por el
acrílico. La altura a la cual se ubicó la interfaz de usuario de control del dosificador fue
fundamental estimarla para poder coincidir con la altura de la tapa de la carcasa.
Figura 40. Vista interna de la ubicación de los dispositivos que conforman el dosificador.
Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.

CAPITULO IV
4. EVALUACIÓN DE DESEMPEÑO Y ANÁLISIS DE RESULTADOS

74
4.1. Pruebas realizadas
Mediante pruebas del sistema se muestra en la Figura 40 la interfaz que representa los
procesos de dosificación del químico 1 o del químico 2 para 2 galones y para 4 galones de
mezcla resultante. Los botones con forma rectangular y de color blanco son utilizados para
visualizar el valor de temperatura y de humedad del dispositivo.
Para indicar que un proceso de dosificación ha sido ejecutado, el color de las letras
intrínsecas en el botón cambian de blanco a magenta y al finalizar vuelve al color normal
como se puede ver en la Figura 41.
Figura 41. Selección del proceso de dosificación de 2 Gal de químico azul. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
Cuando el sistema de dosificación empieza a funcionar, primero se activa la electroválvula
para dejar pasar el agua directamente hacia el recipiente de la mezcla, luego de 5 segundos
la bomba peristáltica se activa para dejar pasar el químico, de ésta manera se logra obtener
una mezcla más homogénea según pruebas realizadas de dosificación en las que el químico
se combina con el agua con mayor facilidad al caer dentro el recipiente con agua.
Para obtener un valor correcto de químico dosificado, se debe considerar el los cálculos el
factor de calibración para cada sensor de flujo, que es el valor de pulsaciones por segundo
por unidad de medida (litros por minuto o mililitros por segundo).

75
En caso de que el valor entregado por el sensor de flujo sea cero, el sistema nos indica en la
pantalla que no hay agua en la tubería para el caso del sensor de flujo YF-S201, y en el
caso de los sensores de flujo de químico YF-S401 nos indica que hace falta químico para
dosificar, como se muestra en la Figura 42.
Figura 42. Pantalla para visualizar alerta del sistema. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
4.2. Pruebas de laboratorio
El procedimiento para verificación de la cantidad de químico adecuado suministrado a la
mezcla se lo realizó por medio de una cinta reactiva (Hydrion QT-40) diseñada para medir la
cantidad de químico en partes por millón (ppm) que debe tener una mezcla, específicamente
para la industria alimenticia.
Éste corresponde en sumergir la cinta en la mezcla obtenida y luego de 10 segundos toma
una coloración que representa un rango en ppm de cantidad de químico. Si éste excede la
cantidad requerida, la cinta tendrá un color verde oscuro que significa que tiene un valor
aproximado de 500 ppm o mayor de concentración de químico, en cambio, si la cinta tiene
un tono rojizo significa que no hay la cantidad suficiente de químico en la mezcla, y
finalmente, si la coloración es de un tono mostaza, significa que la dosis de químico es la

76
correcta y está dentro de un valor aproximado de 200 ppm, como se muestra en la Figura 43
[59].
Figura 43. Cinta de prueba de sanitización QT-40 [59]. Fuente: foodsafety.ecolab.com Elaboración: Ecolab Food Safety Specialties
Además de verificar la proporción de la dosificación en base a la reacción química, también
se realiza la verificación que las cantidades dosificadas en base al volumen, para ello se
utilizó instrumentos de laboratorio como probetas y vasos de precipitación con una
resolución de 10 ml, con capacidades volumétricas de 1000 ml y 2000 ml respectivamente.
Se hicieron en total 40 pruebas volumétricas, 10 con cada opción de dosificación. Se hizo la
instalación del prototipo como se muestra en la Figura 44 en el laboratorio de Hidráulica de
la UTPL.
Figura 44. Instalación del dispositivo de dosificación. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.

77
El químico utilizado para cada sistema de dosificación se dispuso en la parte inferior del
dosificador en contenedores. Antes del primer experimento y como parte del proceso de
instalación, se activan las bombas peristálticas para bombear el químico hasta el punto de
inyección para evitar burbujas de aire en la trayectoria que sigue el químico durante la
dosificación. En la Figuras 45 se muestra una imagen del dosificador ubicado en la pared tal
y como se lo ubicaría en un ambiente real.
Figura 45. Ubicación del dosificador y vista frontal. Fuente: Renato Torres Carrión Elaboración: Renato Torres Carrión
4.3. Comparación con otros dispositivos
Para comprender los resultados obtenidos se hace una comparación con los principales
dispositivos de dosificación de químicos que existen en la actualidad de las marcas Knight
Idex [6] e Hidro System [7], reconocidas por destacarse en ésta área de la industria con sus
modelos: Knight Idex UMP digital con sonda inductiva, Knight Idex Micro-Pro II, Hidro
System Antares DM6000 y el Hidro System Total Eclipse.
- Knight Idex. UMP digital con sonda inductiva
Éste sistema de dosificación (ver Figura 46) está diseñado para ahorrar dinero, al mismo
tiempo que ofrece una completa gama de funciones fáciles de utilizar y opciones para
adaptarse. Con un amplio conjunto de funciones de programación y múltiples opciones para
sondas, solenoides y configuraciones [60].

78
El menú de programación digital ofrecen una configuración rápida para la industria química,
el temporizador y otras funciones y características controladas y la interfaz de usuario
intuitiva y el texto digital grande, brillante que permite una programación sencilla y rápida
[60].
A pesar de todas estas funcionalidades, no dispone de un sistema de control automático
para el agua a la cual se va a añadir el químico. El usuario previamente a dispensar el
químico de sanitización, debe disponer de la cantidad exacta de agua en el lavaplatos o
recipiente donde se coloque la mezcla. Además, no dispone de sensores de humedad y
temperatura que indiquen si existe algún problema de fugas y si algún elemento del
dosificador está generando demasiado calor, lo cual puede derivarse en una falla del
componente.
Figura 46. Dispensador Knight UMP digital con sonda inductiva [60]. Fuente: Knight Idex. Elaboración: Knight Idex.
- Knight Idex. Micro-Pro II
Los sistemas de sanitización Micro Pro II ofrecen lo último en versatilidad y comodidad [61].
Dispone de varias opciones de funcionamiento: sin sonda o con sonda de inducción, con
ajustes de alta y baja concentración, distintas velocidades de dispensación, varios tipos de
detergentes, desinfectantes y bombas, lo cual hacen del Micro Pro II un dispensador
universal (ver Figura 47). Además, posee una carcasa de acero inoxidable con protecciones
de plástico y con un tiempo de vida mayor a 3000 horas de funcionamiento según el
fabricante [61].

79
A pesar de todas las funcionalidades, no dispone de una pantalla para interfaz de usuario
que facilite la operación y el control automático de la dosificación. Tampoco posee un control
automático de la cantidad de agua, y su tamaño es otra disfuncionalidad, ya que se podría
fabricar de manera más compacta.
Figura 47. Dispensador Knight Micro-Pro II [61]. Fuente: Knight Idex. Elaboración: Knight Idex.
- Hidro System. Antares DM6000
El sistema de sanitización utiliza un diseño avanzado para proporcionar características de
gran alcance en un tamaño pequeño. Está disponible en modelos con 2 y 3 bombas
peristálticas. Su carcasa es altamente resistente al agua y la parte electrónica se mantiene
protegida desde el interior [62].
La pantalla LCD de varias líneas permite la programación intuitiva de todas las opciones,
como se puede ver en la Figura 48. También posee un sistema que permite la limpieza de la
tubería que forma parte de las bombas para evitar que queden residuos de químicos [62].
A pesar de sus singulares características, la pantalla requiere de botones analógicos para
escoger las diferentes opciones que se muestran en ella, siendo una gran ventaja para el
sistema de dosificación construido con una pantalla LCD Touch donde toda la interfaz de
usuario es digital y no se requiere de ningún complemento para su funcionamiento.

80
Figura 48. Dispensador Hidro System Antares DM6000 [62]. Fuente: Hidro System. Elaboración: Hidro System.
- Hidro System. Total Eclipse
Es un sistema de gestión automática fiable para operaciones de sanitización que requieren
un sistema de control y gestión de datos (ver Figura 49). Es un controlador versátil
compatible con los sistemas de dosificación de Hidro System y proporciona información de
producción, costo y consumo de productos químicos. Sus principales características son:
controlar hasta 8 procesos de dosificación, programación sencilla basada en computadora,
múltiples idiomas, entre otras [63].
La compatibilidad con los diferentes sistemas de dosificación lo convierte en un dispositivo
versátil, a pesar de esto, solo es compatible con los sistemas de dosificación de Hidro
System. Su principal desventaja es que no integra todo el sistema de dosificación en un solo
dispositivo, por lo que requiere de otros módulos para trabajar.

81
Figura 49. Sistema de control y adquisición de datos Hidro System Total Eclipse [63]. Fuente: Hidro System. Elaboración: Hidro System.
- Prototipo propuesto
A diferencia de los dosificadores comparados anteriormente que existen en la industria de
sanitización, el sistema desarrollado es completamente autónomo gracias a la
implementación de un sistema de almacenamiento de energía que puede ser recargado
cada cierto tiempo dependiendo de su uso, y además dando la posibilidad de conectarlo a
una fuente alternativa de generación de energía.
Otra diferencia que se destaca entre los demás dosificadores es la interfaz de usuario
completamente digital. Con el uso de una pantalla táctil, se reemplazan los botones
convencionales por botones que se muestran con colores y formas que determinan una
función específica en la pantalla.
Función importante en la dosificación, y que no forma parte de ninguno de los dispositivos
comparados anteriormente, es el control automático del flujo de agua, sin que sea necesaria
la intervención manual del usuario para llenar un recipiente, variable que también es
censada en el sistema propuesto con la finalidad de mejorar el proceso de dosificación. En
la Figura 50 se muestra el sistema de dosificación resultado de éste trabajo.

82
Figura 50. Dosificador desarrollado. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
4.4. Análisis de resultados
En la Tabla 11 se hace una comparación de las principales características con las que
cuenta el sistema propuesto relacionándolo con los dosificadores que fueron descritos
anteriormente. Se han tomado en cuenta las características relacionadas con los objetivos
del trabajo para demostrar el cumplimiento de las mismas.
Tabla 11. Comparativa de funcionalidades y características.
Modelo Dosificador desarrollado
Knight UMP digital
Knight Micro-Pro II
HidroSystem Antares DM6000
HidroSystem Total Eclipse
Tamaño 170 x 200 x 87 mm
230 x 200 x 130 mm
228 x 165 x 177 mm
218 x 203 x 143 mm
132 x 114 x 64 mm
Peso 1.2 Kg 2.2 kg 6.3 Kg 2.9 Kg 0.30 Kg Voltaje de
alimentación 12 VDC 120 VAC 240 VAC
120 VAC
120 VAC 240 VAC
120 VAC 240 VAC

83
240 VAC
Tipo de pantalla LCD TOUCH
4 Displays de 11
segmentos
-
LCD LCD
Alerta de fugas SI NO NO NO NO Alerta de
temperatura SI NO NO NO NO
Alerta de desabastecimiento SI NO NO NO NO
Costo aproximado 200,00 usd 500,00 usd
400,00 usd
800,00 usd 500,00 usd
Fuente: [60-63]. Elaboración: Renato Torres Carrión.
Entre las principales ventajas del dispositivo desarrollado se destacan su tamaño, peso,
costo e interfaz de usuario siendo superior en estos aspectos en relación con los equipos de
las marcas comparadas. Además, la carcasa utilizada para el dosificador que fue adecuada
principalmente para el proceso de flujo de agua, cuenta con el estándar de protección IP-65
para proteger del polvo y la humedad a la sección del circuito.
Para verificar que el sistema de dosificación esté funcionando correctamente se realizaron
pruebas del volumen total de mezcla resultante como se muestra en la Tabla 12, donde se
hicieron 10 experimentos por cada opción de dosificación mostrada en la pantalla. El valor
de E.R.P. determina el error relativo porcentual de cada opción de dosificación. Con estos
valores se fue mejorando la calibración del dosificador con la finalidad de obtener los
porcentajes más bajos de error en el volumen de mezcla resultante. Gracias a ello, se pudo
evidenciar errores por debajo del 1 % para la dosificación de 4 Gal y por debajo del 2 % para
la de 2 Gal.
Tabla 12. Resultados obtenidos de los volúmenes de dosificación.
VOLÚMEN DE DOSIFICACIÓN
Cantidad (Gal)
Valor requerido
(ml)
Valor medido
(ml)
Error absoluto
Error relativo E.R.P.
E.R.P. promedio
(%)
4 Gal Químico
rojo
15140 14980 160 0,010568 1,06
0,36
15140 15250 110 0,007266 0,73 15140 15138 2 0,000132 0,01 15140 15000 140 0,009247 0,92 15140 15148 8 0,000528 0,05 15140 15140 0 0,000000 0,00 15140 15130 10 0,000661 0,07 15140 15138 2 0,000132 0,01

84
15140 15115 25 0,001651 0,17 15140 15050 90 0,005945 0,59
2 Gal Químico
rojo
7570 7769 199 0,026288 2,63
1,40
7570 7810 240 0,031704 3,17 7570 7760 190 0,025099 2,51 7570 7580 10 0,001321 0,13 7570 7575 5 0,000661 0,07 7570 7680 110 0,014531 1,45 7570 7685 115 0,015192 1,52 7570 7590 20 0,002642 0,26 7570 7710 140 0,018494 1,85 7570 7600 30 0,003963 0,40
4 Gal Químico
azul
15140 15500 360 0,023778 2,38
0,64
15140 14990 150 0,009908 0,99 15140 15110 30 0,001982 0,20 15140 15300 160 0,010568 1,06 15140 15230 90 0,005945 0,59 15140 15130 10 0,000661 0,07 15140 14980 160 0,010568 1,06 15140 15138 2 0,000132 0,01 15140 15140 0 0,000000 0,00 15140 15145 5 0,000330 0,03
2 Gal Químico
azul
7570 7560 10 0,001321 0,13
1,07
7570 7640 70 0,009247 0,92 7570 7780 210 0,027741 2,77 7570 7800 230 0,030383 3,04 7570 7525 45 0,005945 0,59 7570 7580 10 0,001321 0,13 7570 7550 20 0,002642 0,26 7570 7630 60 0,007926 0,79 7570 7580 10 0,001321 0,13 7570 7715 145 0,019155 1,92
Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
En las Figuras de la 51 a la 54 se muestran las gráficas de las pruebas de volumen
resultante obtenido de cada experimento haciendo una relación del valor medido y el valor
requerido en ml, con la finalidad de demostrar que al hacer una correcta calibración del
dosificador se puede obtener mayor cantidad de experimentos con valores cercanos al valor
requerido, a pesar de que los valores mas alejados del valor requerido no representan
grandes cambios en los volúmenes de dosificación como se evidencia por medio de los
resultados de E.R.P. promedio.

85
Figura 51. Valores medidos (ml) con un E.R.P. promedio de 0.36 %. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
Figura 52. Valores medidos (ml) con un E.R.P. promedio de 1.4 %. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
14980
15250
15138
15000
15148
15140
15130
15138
15115
15050
14970149901501015030150501507015090151101513015150151701519015210152301525015270
1 2 3 4 5 6 7 8 9 10
Volúmendedosificación(4GalQuímicoRojo)
Valorrequerido(ml) Valormedido(ml)
7769
78107760
7580
7575
7680 7685
7590
7710
7600
7400
7500
7600
7700
7800
7900
1 2 3 4 5 6 7 8 9 10
Volúmendedosificación(2GalQuímicoRojo)
Valorrequerido(ml) Valormedido(ml)

86
Figura 53. Valores medidos con un E.R.P. promedio de 0.64 %. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
Figura 54. Valores medidos con un E.R.P. promedio de 1.07 %. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
En las Figuras de la 55 a la 58 se muestran las imágenes de las medidas de volumen de
dosificación realizadas con la ayuda de instrumentos del laboratorio de hidráulica de la
UTPL. Se escogió una imagen de cada cantidad dosificada de los 40 experimentos para
demostrar la medición realizada.
15500
14990
15110
15300
15230
15130
14980
15138
15140
15145
14700
14800
14900
15000
15100
15200
15300
15400
15500
15600
1 2 3 4 5 6 7 8 9 10
Volúmendedosificación(4GalQuímicoAzul)
Valorrequerido(ml) Valormedido(ml)
7560
7640
77807800
7525
7580
7550
7630
7580
7715
73507400745075007550760076507700775078007850
1 2 3 4 5 6 7 8 9 10
Volúmendedosificación(2GalQuímicoAzul)
Valorrequerido(ml) Valormedido(ml)

87
Figura 55. Prueba de la dosificación de 4 Gal con el químico rojo. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
Figura 56. Prueba de la dosificación de 2 Gal con el químico rojo. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.

88
Figura 57. Prueba de la dosificación de 4 Gal con el químico azul. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
Figura 58. Prueba de la dosificación de 2 Gal con el químico azul. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
En la Figura 59 y 60 se muestran los 20 resultados de las pruebas realizadas con el químico
rojo para determinar si la cantidad de químico dosificado ha sido la correcta.
Ésta prueba se realizó únicamente con el químico rojo porque éste es el producto que
sanitiza los alimentos y por medio del color de la cinta se determina la cantidad de Amonio
Cuaternario suministrado en la mezcla, mientras que el químico azul es un desinfectante
complemento del proceso de lavado de alimentos.
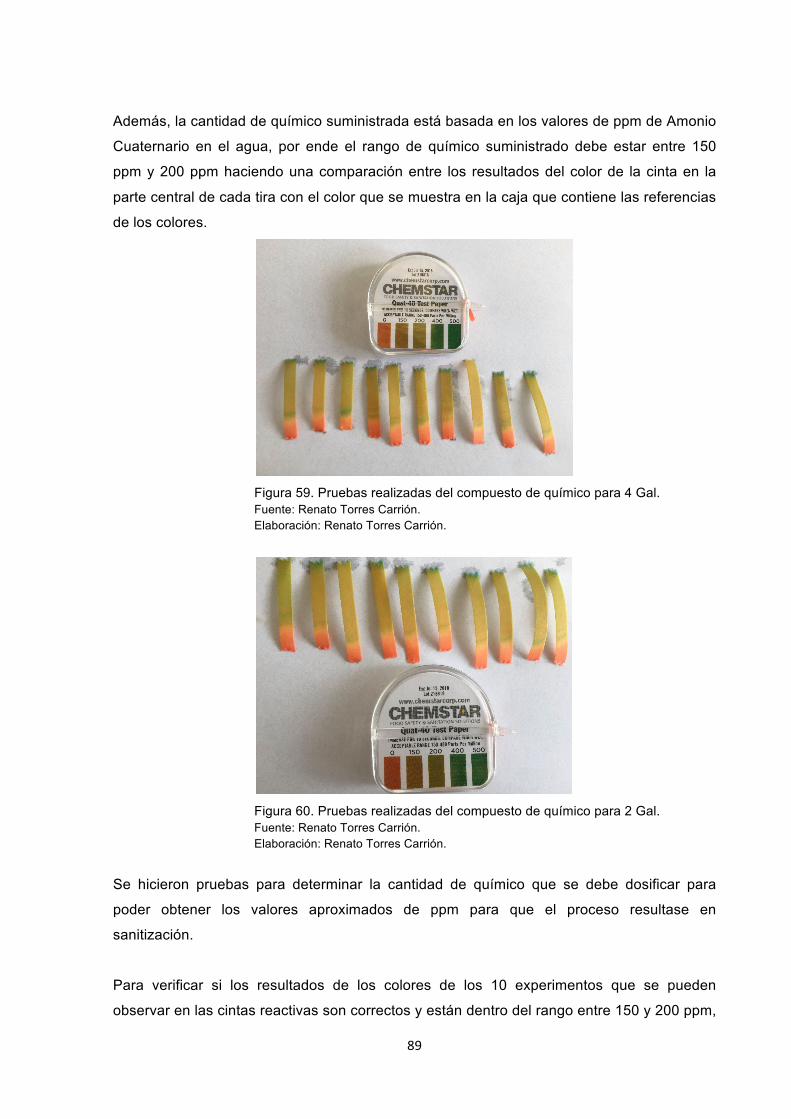
89
Además, la cantidad de químico suministrada está basada en los valores de ppm de Amonio
Cuaternario en el agua, por ende el rango de químico suministrado debe estar entre 150
ppm y 200 ppm haciendo una comparación entre los resultados del color de la cinta en la
parte central de cada tira con el color que se muestra en la caja que contiene las referencias
de los colores.
Figura 59. Pruebas realizadas del compuesto de químico para 4 Gal. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
Figura 60. Pruebas realizadas del compuesto de químico para 2 Gal. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
Se hicieron pruebas para determinar la cantidad de químico que se debe dosificar para
poder obtener los valores aproximados de ppm para que el proceso resultase en
sanitización.
Para verificar si los resultados de los colores de los 10 experimentos que se pueden
observar en las cintas reactivas son correctos y están dentro del rango entre 150 y 200 ppm,

90
se utilizó el método matemático CIELAB que hace un análisis detallado de las distancias de
color basada en la distancia euclidiana del espacio CIE L*a*b* entre cada color de referencia
con el de cada experimento.
En la Figura 61 se observa que los colores de los experimentos 1 al 10, posee distancias
menores con respecto a los colores de referencia de 200 ppm y 150 ppm. En la Tabla 13 se
puede ver los valores obtenidos de las distancias de color en cada experimentos.
Figura 61. Gráfica de la distancia de color (método CIELab) obtenida de los 10 exprimentos resultante de la dosificación de 4 Gal. Fuente: Renato Torres Carrión. Elaboración: Renato Torres Carrión.
Tabla 13. Valores obtenidos de la distancia de color para cada experimento.
Experimento vs ppm
0 ppm 150 ppm 200 ppm 400 ppm 500 ppm
1 38,29 14,84 7,83 52,73 61,42 2 40,14 19,21 12,7 61,47 68,26 3 40,54 21,68 13,32 58,66 69,6 4 27,28 9,38 8,07 45,51 53,12 5 52,21 23,14 12,77 68,03 76,33 6 50,5 18,84 11,57 57,34 74,52 7 38,82 14,76 7,6 57,55 63,3 8 59,77 37,43 32,37 75,47 81,84 9 51,71 27,97 14,61 72,14 79,03
10 67,87 43,79 34,65 84,66 90,71 Fuente: Renato Torres Carrión.
Elaboración: Renato Torres Carrión.
0
10
20
30
40
50
60
70
80
90
100
1 3 5 7 9
Distan
ciadecolor(CIELab
)
No.ExperimentoVolumen4Gal
0ppm
150ppm
200ppm
400ppm
500ppm

91
CONCLUSIONES
Se desarrolló un prototipo completamente funcional de un dosificador de químicos de
sanitización, en un campo de la industria que aún está desarrollando mejores sistemas para
garantizar la salubridad de los alimentos y demás objetos, manteniendo un proceso eficiente
sin desperdicio de productos con la implementación de dispositivos de control automático. El
dosificador automático propuesto está basado en una arquitectura modular conformada por
sensores, actuadores, interfaz de usuario, tarjeta de adquisición de datos, batería recargable
y la plataforma de hardware y software libre Arduino.
Se creó un dispositivo de dosificación con características significativas, en relación con los
dosificadores comparados, tales como: portabilidad para facilitar su ubicación disminuyendo
su tamaño e implementando una batería recargable evitando tener una conexión
permanente del dispositivo con una fuente de energía externa, la interfaz de usuario
mediante la LCD Touch que ningún otro dispositivo de dosificación posee; su bajo costo
aproximadamente de 200,00 usd es un valor agregado importante para el usuario
comprador, y finalmente los sensores que implementa para disminuir el error y mejorar la
precisión en la dosificación.
Se determinó mediante las pruebas de laboratorio realizadas, que el valor de dosificación se
pudo calibrar y mejorar con la finalidad de obtener valores de error relativo porcentual
promedio no mayor a 2 % para dosificación de 2 Gal y menor a 1% para 4 Gal. Además se
constató que la cantidad de químico suministrada a la dosis fue la correcta, gracias al uso de
una cinta reactiva de medición de concentración de Amonio Cuaternario en ppm.
Se determinó que la ubicación de los dispositivos y elementos dentro de la carcasa del
dosificador fue una elección importante para disminuir el tamaño del dosificador y reducir los
tiempos muertos en manipulación en caso de requerir operaciones de mantenimiento o de
ajuste en la parte interna del prototipo desarrollado.

92
RECOMENDACIONES
Se recomienda utilizar un conector de 3/4” con enganche automático en el punto donde se
debe conectar el dosificador automático a la red de suministro de agua destinada para el
sistema de dosificación, con la finalidad de evitar al momento de desconectarlo que el agua
que queda alojada en la tubería caiga sobre el dosificador.
Se recomienda el diseño mecánico de una pieza fabricada en plástico que disponga de los
orificios con las dimensiones requeridas para mejorar el ajuste de los conductos y evitar la
corrosión en el punto de inyección del químico al flujo de agua, ya que la pieza utilizada está
formada por un material que puede ser propenso a la oxidación por causa del químico.
Con respecto a la validación en laboratorio, se recomienda la utilización de un dispositivo
que cuantifique el químico suministrado para evitar subjetividades mediante la cinta reactiva
de medición de concentración de Amonio Cuaternario en la mezcla resultante.
Se recomienda la implementación de una fuente de generación de energía eléctrica en base
a un arreglo de paneles solares que puedan suministrar la suficiente energía para poder
cargar una batería como la utilizada, tratando de perjudicar en lo mínimo al costo final del
dosificador.

93
BIBLIOGRAFÍA
[1] M. McMahon. (2016, Junio, 16). What is food sanitation? (O. Wallace ed.). Available:http://www.wisegeek.com/what-is-food-sanitation.htm
[2] P. D. Angela M. Fraser, "Cleaning and Sanitization of Food-contact Surfaces inRetail/Foodservice Establishments," P. D. Melvin A. Pascall, Ed., ed.http://www.foodsafetymagazine.com/,2010.
[3] C.A.RiveraArmijos, "Diseño y construccióndeundosificadorde tresproductosen formasecuencial,"Quito:EPN,2002.,2002.
[4] Á.M.OsorioUribe,"Diseñodeundosificadordeclorolíquido,"2011.[5] J.A.BeltránSánchezandJ.L.CepedaSánchez,"Automatizacióndeunamáquinadosificadora
paradosisperqueñasdelíquidosenlaempresaFullerpinto,"2013.[6] (2010).KnightIDEXCorporation.Available:http://www.knightequip.com/index.html[7] (2011).HidroSystem.Available:http://hydrosystemsco.com/[8] (Since1957).StennerPumps.Available:http://www.stenner.com/[9] R. A. d. l. L. Española. (2014). Diccionario de la lengua española. Available:
http://dle.rae.es/?id=EAJoSAk[10] O. P. d. l. Salud. Dosificación. Available:
http://www.bvsde.paho.org/bvsacd/scan/027757/027757-02d.pdf[11] P. Ibérica. Bombas dosificadoras. Available: http://www.pce-iberica.es/instrumentos-de-
medida/instrumentos-laboratorios/equipos-laboratorios/bombas-dosificadoras.htm[12] R.BaghbaniandM.Ashoorirad,"APowerGeneratingSystemforMobileElectronicDevices
Using Human Walking Motion," in Computer and Electrical Engineering, 2009. ICCEE '09.SecondInternationalConferenceon,2009,pp.385-388.
[13] F. Posso, "Energía y ambiente: pasado, presente y futuro. Parte dos: sistema Energéticobasadoenenergíasalternativas,"Geoenseñanza,vol.7,pp.54-73,2002.
[14] M.Solar.(2006).Guíadeenergíasolarfotovoltaica(CajaMadrid,ObraSocialed.).Available:http://www.fenercom.com/pdf/publicaciones/guia-de-la-energia-solar-fenercom.pdf
[15] G. E. L. America. Energía solar fotovoltaica. Available: http://www.greenenergy-latinamerica.com/es/energia-solar-solar-fotovoltaica-197
[16] D. Pilco and J. Jaramillo, "Sistemas fotovoltaicos para iluminación: paneles fotovoltaicos,"Univ.TécnicaPart.Loja,pp.1-4,2008.
[17] I. CostalagoBurgos, Energías Renovables. (2014).Tipos de paneles fotovoltaicos. Available:http://www.energiasrenovablesinfo.com/solar/tipos-paneles-fotovoltaicos/
[18] Esco-tel. (2013). PANELES SOLARES MONOCRISTALINOS VS POLICRISTALINOS. Available:http://www.esco-tel.com/paneles_solares_monocristalinos_vs_policristalinos.html
[19] E. fotovoltaica. Células fotovoltaicas de silicio amorfo. Available:http://www.energiafotovoltaica.ws/celdas/celulas-fotovoltaicas-silicio-amorfo.html
[20] E. Solar. Tipos de placas fotovoltaicas. Available: http://www.isolari.es/tipos-de-placas-fotovoltaicas
[21] J.l.LorenzoEscuín,VernisMotors,S.L.,"MicrocentralVernis:energíahidráulicaproducidadencasa,"ininterempresas.net,ed.Internet,2011.
[22] F.García-Alvarado, "Baterías recargalbes de litio: fundamentos ymateriales,"Boletín de laSociedadEspañoladeCerámicayVidrio,vol.35,pp.327-336,1996.
[23] Renobat. (2014). Principales tipos de baterías en el mercado. Available:http://www.renobat.eu/es/comunicacion/articulos/130-principales-tipos-de-baterias-en-el-mercado
[24] M. T. I. Scott Dearborn. (2004). Power Management in Portable Applications: ChargingLithium-Ion/Lithium-Polymer Batteries. Available:http://ww1.microchip.com/downloads/en/AppNotes/00947a.pdf

94
[25] J.H.Fonseca,"Celdas,pilasybateríasdeIon-Litiounaalternativapara...?,"JournalBolivianodeCiencias,vol.8,pp.40-47,2011.
[26] I. Buchmann. Is Lithium-ion the Ideal Battery? Available:http://batteryuniversity.com/learn/article/is_lithium_ion_the_ideal_battery
[27] J. R. A. Enseñat, J. B. G. Ku, J. S. Gio, C. A. Luján, and A. A. Ramírez, "SELECCIÓN ENTECNOLOGÍA DE BATERÍAS PARA ALIMENTACIÓN DE DISPOSITIVOS ELECTRÓNICOSPORTÁTILES."
[28] S. Keeping. (2012). A Designer's Guide to Lithium Battery Charging. Available:http://www.digikey.com/en/articles/techzone/2012/sep/a-designers-guide-to-lithium-battery-charging
[29] A.Serna,F.Ros,andJ.Rico,Guíaprácticadesensores:CreacionesCopyrightSL,2010.[30] R.P.Areny,Sensoresyacondicionadoresdeseñal:Marcombo,2004.[31] E. Rosaen, Rosaen, Lars., Universal Flow Monitors. How Flowmeters Work. Available:
http://www.flowmeters.com/how-flowmeters-work[32] A.C.Solé,Instrumentaciónindustrial:Marcombo,2012.[33] J.Mayné,"Sensores,acondicionadoresyprocesadoresdeseñal,"SilicaanAvnetDivision.Los
pasos a seguir para acceder a los datos de la ECU se ilustran a continuación. Primero seaccedealmenúprincipalyseeligelaopcióndiagnósticoconlateclaenter,comoloilustralafiguraB,vol.2,pp.2000-2007,2003.
[34] J.Glaría,"Sensoresdehumedad,"UniversidadtécnicaFedericoSantaMaría,2001.[35] E. J. Carletti. Sensores - Humedad. Descripción y funcionamiento. Available: http://robots-
argentina.com.ar/Sensores_humedad.htm[36] A. d. l. i. e.-e. Eugenio Vildósola C. ACTUADORES. Available:
http://www.aie.cl/files/file/comites/ca/abc/actuadores.pdf[37] R.A.RodríguezLandeta,P.Plazarte,andD.Vinicio,"Diseñoeimplementacióndeunsistema
dedosificacióndelíquidosconcontroldevolumenapresiónconstante,"2010.[38] C. H. Tapia Ayala and H. M. Manzano Yupa, "Evaluación de la plataforma arduino e
implementacióndeunsistemadecontroldeposiciónhorizontal,"2013.[39] J.C.H.HerranzandJ.S.Allende,"UnamiradaalmundoArduino,"Tecnologíaydesarrollo,p.
11,2015.[40] J. C. González Vidal, "Desarrollo de un servidor web con Arduino para monitorización y
controldesensoresyactuadores,"2013.[41] N. E. M. Association. (2005, Junio, 16). NEMA Enclosure Types Available:
https://www.nema.org/Products/Documents/nema-enclosure-types.pdf[42] J.V.R.DavidRodríguezGómez.(2009,Junio,14).Metodologíadelainvestigación.Available:
http://zanadoria.com/syllabi/m1019/mat_cast-nodef/PID_00148556-1.pdf[43] J.Cohen,R.Wettach,andA.Knörig,"Fritzing–Atoolforadvancingelectronicprototypingfor
designers."[44] L.a.Electronics. (Junio,28).Cómoconstruiruncircuitode labombaperistálticacontrolado
por un Arduino. Available: http://www.learningaboutelectronics.com/Articles/Peristaltic-pump-circuit-with-an-arduino-microcontroller.php
[45] L.ChangzhouYuanwangFluidTechnologyCo.(Junio,28).YW01-DC12VBombaperistálticade micro caudal Available:http://www.ywfluid.com/index.php?route=product/product&product_id=65
[46] L. Zhejiang KeBo Electrical Appliances Co. FPD-270A Solenoid Valve. Available:http://www.cnkb.cc/en/product_show.asp?id=385
[47] B. R. .Inc. (2015, Julio, 10). Controlling A Solenoid Valve With Arduino. Available:http://www.bc-robotics.com/tutorials/controlling-a-solenoid-valve-with-arduino/
[48] L. E. Yánez. (2014, Julio, 7). DEPARTAMENTO DE CIENCIAS DE LA ENERGIA Y MECANICA,Laboratorio de Instrumentación Industrial Mecánica. Tema: Caudalímetro tipo turbina.Available:http://insdecem.com/archivos/guias/GuiaF1_INST.pdf

95
[49] T. K. Hareendran. (2016, Julio, 7).WorkingwithWater Flow Sensors& Arduino. Available:http://www.electroschematics.com/12145/working-with-water-flow-sensors-arduino/
[50] Administrador. (2015, Julio, 6). ARDUINO Y LAS INTERRUPCIONES. Available:http://www.prometec.net/interrupciones/
[51] ThingNovation. CAUDALIMETRO YF-S401 0.3 6 L / MWATERMETERWATER FLOWMETERCOUNTER ARDUINO. Available: http://thingnovation.com/cadalimetro-yf-s401-0-3-6-l-m-flowmeter-counter-water-agua-meter-arduino.html
[52] D.-R.UK. (2010, Julio,5).DHT11Temperature&HumiditySensor featuresatemperature&humidity sensor complex with a calibrated digital signal output. Available:http://www.micropik.com/PDF/dht11.pdf
[53] M. Prosseda. (Julio, 5). DHT11 Humidity and Temperature Digital Sensor. Available:http://www.tme.eu/es/Document/7a4fd48d400b8c4c8309ef1e2b13cdd4/MR003-005-1.pdf
[54] L.BaojiHaoYuHitechMachineEngineeringCo.18V2.5WSolarPanelModuleSolarSystemSolar Cells Charger DIY 120x194mm. Available: https://www.amazon.co.uk/STOREINBOX-Module-System-Charger-120x194mm/dp/B00SF4VZIY
[55] Floureon. (2005, Julio, 18). FLOUREON 3S 25C 11.1V 2200mAh (Deans Plug) Li-PolymerBattery Pac. Available: https://www.amazon.com/Floureon-Transmitter-Quadcopter-Airplane-Helicopter/dp/B01BXZCR4W
[56] I.T.CORP.(Julio,5).a-SiTFTLCDSingleChipDriver240RGBx320Resolutionand262Kcolor.Available:https://cdn-shop.adafruit.com/datasheets/ILI9325.pdf
[57] RoboShop. (2012, Julio, 5). 2.8'' TFT Touch Shield. Available:http://www.robotshop.com/media/files/PDF/touch-shield-sld62445p.pdf
[58] R.R.IYENGAR,"THEWATERFLOWMONITORINGMODULE."[59] E. F. S. Specialties. (Julio, 14). Cinta de prueba de sanitización: QT-40. Available:
https://foodsafety.ecolab.com/us/marriott/test-strips/test-strips/sanitizer-test-strips%3A-qt-40-20304-05-11
[60] k. I. Corp. (Julio, 16). Dispensador UMP digital con sonda inductiva. Available:http://www.knightequip.com/ump.html
[61] k. I. Corp. (Julio, 16). Micro-Pro II Dispensador de químicos de sanitización. Available:http://www.knightequip.com/micropro.html
[62] H. S. Company. (2014, Julio, 17). Antares DM6000. Available:http://hydrosystemsco.com/product/antares-dm6000/
[63] H.S.Company.(2015,Julio,15).Controladordesanitizaciónygestióndedatosparasistemadebombeo.Available:http://hydrosystemsco.com/product/total-eclipse/