university of calgary distributed energy …people.ucalgary.ca/~mghaderi/docs/naghibi.pdf · 1.3 4g...
TRANSCRIPT

UNIVERSITY OF CALGARY
Distributed Energy Minimization in Heterogeneous Cellular Networks
by
Seyedmohammad Naghibi
A THESIS
SUBMITTED TO THE FACULTY OF GRADUATE STUDIES
IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE
DEGREE OF MASTER OF SCIENCE
DEPARTMENT OF COMPUTER SCIENCE
CALGARY, ALBERTA
November, 2015
© Seyedmohammad Naghibi 2015

UNIVERSITY OF CALGARY
FACULTY OF GRADUATE STUDIES
The undersigned certify that they have read, and recommend to the Faculty of Graduate
Studies for acceptance, a thesis entitled “Distributed Energy Minimization in Heterogeneous
Cellular Networks” submitted by Seyedmohammad Naghibi in partial fulfillment of the re-
quirements for the degree of MASTER OF SCIENCE.
Supervisor, Dr. Majid GhaderiDepartment of Computer Science
Dr. Carey WilliamsonDepartment of Computer Science
Dr. Geoffrey MessierDepartment of Electrical and
Computer Engineering
Date

Abstract
Heterogeneous networks are designed to increase the capacity for cellular data traffic. Self-
organization is a key element of heterogeneous cellular networks. In this thesis, we present
a randomized algorithm that addresses two challenges in HetNets, namely energy saving
and throughput maximization, in a self-organizing manner. More specifically, the proposed
algorithm seeks to maximize an objective function that balances the trade-off between the
downlink bit rate of users, and the energy consumption of base stations. To achieve this
goal, we deactivate under-utilized picocells to save energy, and adjust low-power Almost
Blank Subframes to utilize the frequency spectrum and minimize the interference between
macrocells and picocells. An important feature of our algorithm is its distributed design,
which eliminates the need for a central device to coordinate the base stations. In fact, the
base stations directly interact with each other in a locally defined neighborhood to drive the
system toward the optimal state.
ii

Table of Contents
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iiTable of Contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iiiList of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vList of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viList of Symbols . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1 Solution Optimality . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2.2 Adaptation to Modern Networks . . . . . . . . . . . . . . . . . . . . 41.2.3 Pico-cell Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4 Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72 Background and Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . 102.1 User Association . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.1 Static Association Methods . . . . . . . . . . . . . . . . . . . . . . . 102.1.2 Load-Aware Association Methods . . . . . . . . . . . . . . . . . . . . 11
2.2 Interference Management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2.1 Interference Types . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2.2 Interference Coordination . . . . . . . . . . . . . . . . . . . . . . . . 162.2.3 Interference Management in LTE . . . . . . . . . . . . . . . . . . . . 18
2.3 Self-Organizing Networks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.4 Related Works on Self-Organization . . . . . . . . . . . . . . . . . . . . . . . 25
2.4.1 User Association . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.4.2 Interference Coordination . . . . . . . . . . . . . . . . . . . . . . . . 272.4.3 Gibbs Sampling Based Methods . . . . . . . . . . . . . . . . . . . . . 29
3 Optimization Techniques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.1 Convex Optimization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.2 Discrete Optimization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.2.1 Basic Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.2.2 Gibbs Sampling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403.2.3 Simulated Annealing . . . . . . . . . . . . . . . . . . . . . . . . . . . 443.2.4 Sample Usage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4 Methodology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.2 System Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.2.1 General Assumptions . . . . . . . . . . . . . . . . . . . . . . . . . . . 504.2.2 Network Topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504.2.3 Frame Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 514.2.4 User Rates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 584.2.5 BS Power Consumption . . . . . . . . . . . . . . . . . . . . . . . . . 594.2.6 Optimization Objective . . . . . . . . . . . . . . . . . . . . . . . . . . 60
iii

4.3 Solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 634.3.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 634.3.2 Gibbs Sampler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 654.3.3 Distributed Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5 Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 725.1 Simulation Environment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
5.1.1 Simulation Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . 735.1.2 Implementation Remarks . . . . . . . . . . . . . . . . . . . . . . . . . 76
5.2 States of BSs After Convergence . . . . . . . . . . . . . . . . . . . . . . . . . 785.3 Energy-Throughput Trade-off . . . . . . . . . . . . . . . . . . . . . . . . . . 805.4 Rate Utility Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 825.5 Sleep Mode and ABS Subframes . . . . . . . . . . . . . . . . . . . . . . . . . 855.6 Dense Deployment of Pico-BSs . . . . . . . . . . . . . . . . . . . . . . . . . . 875.7 Numerical Analysis of Convergence . . . . . . . . . . . . . . . . . . . . . . . 91
5.7.1 Temperature Function . . . . . . . . . . . . . . . . . . . . . . . . . . 915.7.2 Update Rate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 945.7.3 Initial Temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . 945.7.4 Duration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 986.1 Thesis Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 986.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100Bibliography . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
iv

List of Tables
4.1 Notations of the model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.1 Simulation parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 755.2 Global performance measures . . . . . . . . . . . . . . . . . . . . . . . . . . 785.3 Statistics of macro-BSs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 805.4 Statistics of pico-BSs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 805.5 Effect of the energy cost on the converged state. . . . . . . . . . . . . . . . . 825.6 Effect of rate utility function on user throughputs . . . . . . . . . . . . . . . 845.7 Effect of ABS subframes and pico-BS sleep mode on final states. . . . . . . . 865.8 Effect of ABS subframes and pico-BS sleep mode on global objective. . . . . 865.9 Global objective of grid of pico-BSs . . . . . . . . . . . . . . . . . . . . . . . 885.10 Effect of the temperature function on convergence . . . . . . . . . . . . . . . 925.11 Effect of update rate on convergence of the system. . . . . . . . . . . . . . . 945.12 Effect of the initial temperature on convergence . . . . . . . . . . . . . . . . 955.13 Effect of duration of Gibbs Sampling on grid on pico-BSs . . . . . . . . . . . 955.14 Effect of duration of Gibbs Sampling on the small HetNet . . . . . . . . . . 96
v

List of Figures and Illustrations
1.1 A heterogeneous network . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 3G network architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.3 4G network architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1 Cellular user association . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.2 Different types of interference . . . . . . . . . . . . . . . . . . . . . . . . . . 152.3 Reuse patterns . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.4 Interference coordination using both frequency and time domains. . . . . . . 182.5 Variable power allocation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.6 Almost blank subframe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.7 Reduced power ABS subframes . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.1 A convex function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.2 Monte Carlo integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.3 Markov chain representation of a random field . . . . . . . . . . . . . . . . . 433.4 A sample network . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 463.5 Tow-tier neighborhood graph . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.1 Frames and subframes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 524.2 Frame structure of a macro-BS. . . . . . . . . . . . . . . . . . . . . . . . . . 544.3 Frame structure of a pico-BS . . . . . . . . . . . . . . . . . . . . . . . . . . . 554.4 Multiple macro-BSs interfering with a user. . . . . . . . . . . . . . . . . . . . 564.5 Interference on a user during a frame . . . . . . . . . . . . . . . . . . . . . . 574.6 Interaction graph neighborhood . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.1 The simulated HetNet scenario . . . . . . . . . . . . . . . . . . . . . . . . . 745.2 Neighborhood system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 785.3 The network after convergence. . . . . . . . . . . . . . . . . . . . . . . . . . 795.4 Throughput vs. energy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 815.5 State of the network with sum rate function . . . . . . . . . . . . . . . . . . 845.6 Effect of ABS subframes and pico-BS sleep mode on objective . . . . . . . . 865.7 Global objective of grid of pico-BSs . . . . . . . . . . . . . . . . . . . . . . . 885.8 Dense deployment of pico-BSs . . . . . . . . . . . . . . . . . . . . . . . . . . 895.9 Neighborhood graph of the pico-BSs . . . . . . . . . . . . . . . . . . . . . . 895.10 Hibernating every other BS in the pico-BS grid . . . . . . . . . . . . . . . . 905.11 Optimal state of pico-BSs . . . . . . . . . . . . . . . . . . . . . . . . . . . . 905.12 Convergence of logarithmic temperature function . . . . . . . . . . . . . . . 925.13 Convergence of linear temperature function . . . . . . . . . . . . . . . . . . . 925.14 Convergence of quadratic temperature function . . . . . . . . . . . . . . . . 935.15 Effect of duration of the algorithm on global objective . . . . . . . . . . . . . 96
vi

List of Symbols, Abbreviations and Nomenclature
Symbol Definition
3GPP 3rd Generation Partnership Project
ABS Almost Blank Subframe
ANR Automatic Neighbor Relation
AP Access Point
BS Base Station
CSB Cell Selection Bias
CSG Closed Subscriber Group
eICIC Enhanced Inter-Cell Interference Coordination
eNB Evolved Node B
feICIC Further Enhanced Inter-Cell Interference Coordination
ICIC Inter-Cell Interference Coordination
LTE Long Term Evolution
MCMC Markov Chain Monte Carlo
MRF Markov Random Field
NRT Neighbor Relation Table
PPP Poisson Point Process
RF Radio Frequency
RNC Radio Network Controller
SINR Signal to Interference and Noise Ratio
SON Self-Organizing Network
UE User Equipment
WLAN Wireless Local Area Network
vii

Chapter 1
Introduction
1.1 Motivation
Cellular data traffic has recently seen a rapid growth due to the proliferation of data-enabled
mobile devices such as smartphones, tablets, and cellular modems. In 2014, 800 million
smartphone subscriptions were added, and by the end of 2020, it is expected that 5.4 billion
mobile broadband subscriptions will be added worldwide [6]. Mobile data traffic also grew
remarkably fast and mobile networks carried nearly 30 exabytes of traffic in 2014, almost 30
times the size of the entire global Internet in 2000. Global mobile traffic will surpass 290
exabytes by 2019 [22], considering the increasing demand for online video streaming, video
calls, and cloud-based services.
Heterogeneous networks (HetNets) are introduced as a solution to cope with the ever-
rising data demand, especially at cell edges and indoor environments, where about 70 percent
of today’s data traffic is generated [5]. In HetNets, in addition to the traditional macrocells,
low-power small-cells are added to extend service coverage, with ranges from 10 meters to a
few kilometers [1]. The term picocell refers to small cells typically with ranges from a few
hundred meters to two kilometers, which are deployed to improve coverage in places where
the macrocell signal is weak (Figure 1.1). Femto-cells are small-cells designed for use in a
home or office building, with ranges in the order of 10 meters. As opposed to picocells,
femtocells usually require subscription and do not serve public users.
The faster data speeds of HetNets come at the expense of network management com-
plexity. With many more cells to manage, it is cumbersome and inefficient to manually set
up and optimize the network. Automatic and intelligent ways are preferable to configure
and optimize network parameters, such as channel allocation, interference coordination, and
1

Figure 1.1: A simple HetNet. Traditional macrocells are served by high-power base stations,usually mounted on ground-based masts. Picocells provide coverage for smaller areas suchas buildings or small neighborhoods. Femtocells are designed for a home or small office.
power control. The ability of a network to organize itself and optimize its own parameters
with minimal human effort is known as self-organization. This ability is considered to be
one of the key elements of future heterogeneous cellular networks [62].
Another challenge arising from the growth of cellular networks is the energy consumption
of base stations. By the end of 2017, according to [14], more than 3000 small cells are needed
to support a dense traffic in a city just over 33 km2. Having too many unsupervised picocells
is shown to reduce the overall efficiency of the network [60]. Utilization of base stations in
dense urban environments fluctuates throughout the day. According to one report, the
traffic load at 6 a.m. is less than 20% of the peak rate at 10 p.m. [30]. Subsequently, the
number of base stations needed to satisfy user demand varies over time. Actually, picocells
have a built-in capability to enter sleep mode to save energy when their presence is not
necessary [12].
2

1.2 Objectives
With the above points in mind, this work addresses two challenges in HetNets, namely
energy saving and throughput maximization, in a self-organizing fashion. We consider a
heterogeneous network composed of macrocells and picocells. Pico base stations are capable
of entering sleep mode when the demand is low according to the network policies. In active
mode, pico base stations transmit at their maximum power, while in sleep mode they do not
serve any user. Macro base stations, on the other hand, are always active. However, they
are capable of transmitting at various power levels to mitigate the interference on other cells
and lower their energy consumption.
In general, having more active picocells and high-power macrocell signals leads to a
higher network throughput. The downside is that this throughput enhancement increases
the energy consumption of the network. We define an objective function that balances the
trade-off between network throughput and energy consumption of BSs. We then develop a
solution to maximize this function to find the optimal state of the network. In particular,
we determine which picocells must remain active and which ones should enter sleep mode to
find the optimal balance. Moreover, we adjust the transmission power of macro base stations
to mitigate the interference on picocell users and maximize the objective function.
In the following, we express the desirable features of our solution.
1.2.1 Solution Optimality
The problems of user association and inter-cell interference coordination are generally non-
convex [39, 59, 69]. Such optimizations usually involve solving an NP-hard integer program
and therefore an efficient solution to find the optimal answer cannot be found. One approach
to get around this issue is relaxing the constraints and transforming the problem into a convex
optimization [72]. Sometimes, another step is taken consisting of using the output of a convex
optimization problem as an intermediate result and converting it to a feasible solution for
3

the original integer problem [29]. Others apply heuristic algorithms hoping that reasonably
good results can be found. We seek to address these limitations by using a method that is
mathematically proven to give the optimal answer.
1.2.2 Adaptation to Modern Networks
One of the strategies to facilitate network expansion is to simplify the network structure.
Recently, some standalone entities pertaining to previous generations of cellular networks
have been removed, with their functionality merged into other existing entities. As a result,
there are fewer devices, but they are more complex and sophisticated. For instance, Radio
Network Controller (RNC) is a device belonging to 3rd Generation cellular networks that
is responsible for controlling a group of base stations (or NodeBs, in 3G terminology) [9].
Its functionality includes radio resource management and mobility management, such as
managing the handover process when User Equipment (UE) moves from one cell to another
(Figure 1.2). LTE networks eliminate the need for RNC, and embed its functionality in more
complicated base stations, known as evolved-NodeBs [7]. In order for eNodeBs to carry out
these responsibilities, they should be able to communicate with each other directly, without
a central controller. For this purpose, the X2 interface is introduced in eNBs to convey
messages directly (Figure 1.3). This makes it possible to deploy new base stations with
fewer worries, e.g. having to deal with RNCs.
This architecture encourages network protocol designers to devise distributed network
management schemes. We, too, are inspired to exploit the new features in LTE networks,
one of which is the aforementioned eNB-to-eNB link.
1.2.3 Pico-cell Protection
Deploying both macrocells and small-cells in a heterogeneous network requires some con-
siderations to be made. Strong signals from adjacent macro base stations may overpower
small base station signals received at small-cell users and make them experience degraded
4

Figure 1.2: Overall view of a 3G mobile network. The Core Network is the central partof the system that routes data and telephone calls and provides various other services tocustomers. Radio Access Network resides between user devices and the core network. NodeBsare connected to the core network through Radio Network Controllers. Each RNC controlsa number of NodeBs and performs radio resource management and mobility management.NodeBs cannot communicate directly with each other.
service quality. In order for macro and small cells to coexist peacefully, the concept of Al-
most Blank Subframes (ABS) is introduced. The idea of ABS subframes is to dedicate a
portion of each radio frame for small-BS transmissions, and have the macro-BSs fully (or
partially) restrained from transmitting data signals during those subframes to reduce the
interference on small-cell users. The ratio of ABS to non-ABS subframes depends on the
network policy, and is studied in the literature [29, 72]. Some of proposed algorithms (for
example [72]) synchronize all the base stations and assign a network-wide ratio to all of them.
Assigning a single ratio to every base station in the network is inefficient, and may cause
some macrocells to underutilize their spectrum, and others to interfere overwhelmingly with
their neighboring small-cells. As opposed to this global configuration, we aim to adjust this
parameter on a per base station basis. That means, we let each BS individually decide how
many ABS subframes are required, based on the users and BSs in its local neighborhood.
5

Figure 1.3: Overall view of a 4G mobile network. Evolved-NodeBs are connected to the corenetwork using S1 interface. They can also directly communicate with each other through X2interface. This interface can be used by eNodeBs to share information in a local neighbor-hood.
1.3 Contributions
In this thesis, we develop and evaluate a distributed algorithm to efficiently balance the
trade-off between network throughput and energy consumption of base stations in a het-
erogeneous cellular network. Energy saving is primarily achieved by putting under-utilized
pico base stations into sleep mode. The proposed method is based on the framework in [15],
and uses Gibbs Sampling which is analytically proven to drive the network to the optimal
state, in which the desired throughput-energy balance is obtained. In our protocol, base sta-
tions work in a self-organizing manner to find the optimal network configuration. There is
no need for a central management entity to find the optimal state, and base stations only
need to exchange information and measurements in a locally defined neighborhood in order
to reach the globally optimal state in a distributed fashion.
More specifically, our algorithm:
6

• determines which base stations should be in sleep mode to minimize the energy
consumption without having significant throughput loss.
• finds the optimal ratio of ABS subframes for each macro base station, to lessen
the interference on adjacent picocells.
• assigns to each macro-BS the optimal RF output power level during ABS
subframes in order to avoid wasting resources.
• determines the ratio of subframes that ought to be allocated to each user of a
base station.
We simulate the proposed algorithm on two different network topologies, study the effect of
each parameter, and report the findings through graphs and tables. The results show that
our algorithm provides considerable throughput enhancement and energy savings.
To the best of our knowledge, this is the first work that incorporates Gibbs Sampling to
dynamically regulate pico-BSs and adjust ABS subframes in HetNets.
1.4 Organization
The rest of this thesis is organized as follows. Chapter 2 reviews the background and re-
lated work in cellular networks. Static user association based on Reference Signal Received
Power is described, and its ineffectiveness in HetNets is demonstrated. Next, load-aware
user association schemes are discussed as a solution to best utilize the available frequency
spectrum, and standard mechanisms to implement smart user association are studied. Then
we enumerate different scenarios in which interference can degrade the service quality expe-
rienced by mobile users in heterogeneous cellular networks. We illustrate how the emergence
of picocells and femtocells has introduced new interference scenarios that did not exist in
traditional homogeneous networks. Then we explain interference coordination methods that
7

are currently employed. We depict how time domain, frequency domain, and power alloca-
tion techniques can be exercised to share the same spectrum by multiple neighboring cells.
Specifically, we demonstrate how Almost Blank Subframes can alleviate the interference
between neighboring macrocells and picocells using time domain and power allocation ad-
justments. Different types of self-organizing schemes, including centralized and distributed
methods, are also reviewed, and their strengths and weaknesses are discussed.
Chapter 3 explains the optimization techniques used in the proposed method. Our
method aims to solve two types of optimization problems: A group of convex optimiza-
tion problems are solved locally at each base station, and the results are exchanged in a
neighborhood of base stations to distributedly solve a larger non-convex combinatorial op-
timization problem. In this chapter, we begin with defining convex optimization problems,
and briefly reviewing the techniques that are used to solve such problems efficiently. Then
we scrutinize Gibbs Sampling as the basis of our algorithm, which is used to solve the non-
convex combinatorial problem. In order to explain Gibbs Sampling, we first review some
essential concepts such as Monte Carlo method, Markov chains, and Markov random fields.
By showing the equivalence of Gibbs fields and Markov random fields, we explain how a
Markov field defined over a neighborhood system can be randomly sampled to converge to
its steady state. We also demonstrate why the information of two-tier neighbors is needed
for each node of the Markov field to generate a new sample. At the end of Chapter 3, an
example is given on how to apply Gibbs Sampling to solve network optimization problems
in a distributed manner, regardless of their convexity.
We describe the proposed method in Chapter 4. In this chapter, we first specify our
assumptions. Then we define the signal transmission model at macrocells and picocells.
Next, we describe how users are associated with base stations, and calculate the signal
to interference and noise ratio (SINR) of users during different subframes, which is used
to formulate user throughputs. The power consumption of macro and pico base stations
8

is also modeled in both active mode and sleep mode. Using these models, we define the
objective function that balances the trade-off between transmission rates of users and power
consumption of base stations, and formulate the optimization problem and its constraints.
Finally, an iterative Gibbs Sampling based algorithm is proposed to distributedly solve the
problem by randomly sampling from a distribution that converges to the optimal state.
Numerical results are evaluated in Chapter 5, and the effect of each parameter of the
algorithm on the objective function is analyzed. This chapter shows how the total trans-
mission rate of the system can be improved by adjusting the duration and power of ABS
subframes. We also examine the energy saving that can be achieved by deactivating pic-
ocells, and evaluate how this power consumption reduction affects the objective function.
Finally, we study the convergence of the proposed algorithm and investigate how different
parameters can determine the speed and accuracy of the convergence.
Chapter 6 concludes the thesis, and discusses limitations of the simulations presented in
this work. At the end, several areas for future work are suggested.
9

Chapter 2
Background and Related Work
In this chapter, we explain some of the challenges in resource management of cellular net-
works, and review standards and proposed solutions to overcome them. In Section 2.1, we
discuss different approaches to associate users to base stations in cellular networks. Sec-
tion 2.2 describes different scenarios where interference can impair user bit rates in hetero-
geneous networks, and reviews approaches to address this problem. Section 2.3 discusses the
importance of self-organization in cellular networks, and revisits three architectural types
of self-organizing networks. At the end of this chapter, a review of the literature on the
discussed topics is provided in Section 2.4.
2.1 User Association
In this section, we look at the methods for how mobile users are associated with base stations
in cellular networks.
2.1.1 Static Association Methods
The most intuitive way to associate a user to a base station is to assess the received signal
strength value. In this mode, which is widely used in pre-LTE cellular networks, each
UE listens to all reference signals coming from base stations and chooses the one with the
strongest value (Figure 2.1a). This simple scheme requires no cooperation with BSs and only
depends on the cell transmit power and the channel between the BS and the user. In this
approach, user-i selects a base station BS-i using the following relation:
BSi = arg maxj∈B
(PjHij)
10

where B is the set of base-stations, Pj is the transmit power of BS-j, and Hij is the channel
loss between user-i and BS-j.
Connecting to a base station purely based on the received signal strength might be a
reasonable choice for homogeneous cellular networks. Since all of the BSs in these types of
networks have more or less the same level of transmit power, choosing the strongest signal
implicitly balances the network load over all BSs, assuming the base stations are located
according to the expected user distribution pattern.
Other basic and load-independent association mechanisms have also been proposed. In
[36], a Picocell First scheme is suggested to bring BSs closer to users and offload more data
to picocells. In this scheme, a UE connects to the strongest picocell, provided that this
strongest picocell signal is above a certain threshold, which is a tunable parameter. If the
signals coming from all of the picocells are too weak and do not meet the minimum required
quality, then the user equipment has to connect to a macrocell.
2.1.2 Load-Aware Association Methods
Range Expansion
In heterogeneous networks, in contrast to homogeneous networks, relying only on the re-
ceived power can result in a poorly balanced network. Although the density of picocells is
usually higher than macrocells in any covered area, maximum transmit power of picocells is
considerably less than that of macrocells. Considering the free space radio wave propagation
model, in which received power is inversely related to the square of the distance, small-cell
transmissions are overpowered by macrocell signals as the distance increases from the small-
cell. Therefore, except for the areas very close to the small-cells, macrocell transmissions
are dominant. This stronger power tempts most of the UEs to connect to the bigger and
geographically farther BSs, hence extremely increasing the traffic load on sparse macrocells
and leaving the small-cells underutilized. This is obviously inefficient, and wastes resources.
It also contradicts one of the important rationales for implementing heterogeneous networks,
11

(a) Without range expansion (b) With range expansion
Figure 2.1: User association. The light blue area is added to the range of the picocell afterrange expansion.
which is offloading the macrocell traffic to small-cells when possible.
To overcome this problem, the concept of range expansion is introduced by 3GPP [53]. In
this mechanism, UEs tend to favor small-cells over macrocells in spite of their lower received
power. Particularly, instead of just comparing the received signal power, each base station is
associated with a Cell Selection Bias (CSB). When deciding which base station to connect
to, UEs calculate the sum of signal power and cell selection bias, and connect to the cell that
yields the maximum value:
BSi = arg maxj∈B
(PjHij + αj)
where αj is the cell selection bias for BS-j. Using this technique, some of the users that would
have connected to a macrocell without considering αj are now biased toward associating to
a small-cell. This can be interpreted as if the range of the small-cell was expanded to cover
a wider area (Figure 2.1b).
Modern cellular networks tend to dynamically balance the load on base stations according
to the distribution of user traffic over the geographical area. This can be achieved, for
example, by means of cell selection bias. The network can dynamically monitor the load and
assign higher CSB values to under-utilized cells in order for them to attract mobile users, and
at the same time reduce the CSB value for overcrowded cells to offload some of their users
12

to adjacent cells. In Section 2.4, we review some of the proposed load-aware cell association
techniques.
2.2 Interference Management
A mobile user can usually detect signals from multiple base stations on the same frequency
channel. While one of them provides useful data, the other ones (from BSs not associated
with the user) add up destructively and interfere with the main signal.
2.2.1 Interference Types
Figure 2.2 illustrates 3 different scenarios in which interference can severely damage the
wireless link quality of a UE.
Cell Edges
In the first case, the user is located in the boundary region of two neighboring cells (Fig-
ure 2.2a). Therefore, the signal from both BSs is weak, and the user can connect to either of
the BSs without any significant advantage. In this area, the user receives the weakest signal,
while experiencing the strongest interference, because moving in either direction makes one
of the signals stronger and the other one weaker. This makes the signal to interference and
noise ratio (SINR), and consequently the user throughput, very low.
The user in Figure 2.2a is called a cell-edge user. This type of interference is common
between heterogeneous and homogeneous networks, and does not happen to users in a short
distance from base stations.
Macro – Pico Interference
HetNets introduce other interference types that did not exist in homogeneous networks.
As can be seen in Figure 2.2b, the UE is not at the edge of the macrocell. This user is
associated to the picocell, either because it is getting a stronger signal from it, or because of
13

the scheduling policy of the network to offload macrocell user to small cells. As the range of
the cells implies, the macro-BS signal is still powerful enough to damage the signal quality
of the user. In fact, the user could have been connected to the macrocell if the pico-BS
had not been deployed there. So again the interference is significant, and the throughput is
degraded. This means that picocell users have to be protected from macro-BSs. Especially,
it gets worse when the user is connected to the picocell due to range expansion. In this
case, the macro-BS has a higher signal level, and SINR of the user is remarkably low, which
renders the channel almost useless for the user if it is not handled properly. Note that this
type of interference does not happen in homogeneous networks, where there is at most one
powerful and dominant signal at any point.
Macro – Femto Interference
Another type of interference can also occur when a macrocell and a small-cell are involved
[34]. Unlike the previous type, this one happens when there is a femtocell, instead of a
picocell, and works in a similar but opposite fashion. A pico-BS, like macro-BSs, accepts
association requests from all customers of a cellular provider, and its purpose is to cover
crowded areas, blind spots or macrocell edges. Femto-BSs, on the other hand, work in a
private manner, and only serve authorized users registered in a Closed Subscription Group
(CSG). They are also smaller in size, and designed to provide cellular access to a limited
number of users, like users in a small building. Non-registered users, no matter how close,
are denied by the femto-BS and their association requests get rejected. As a result, they
have to connect to a macro (or pico) base station, in the presence of the stronger nearby
femto-BS. This again results in a very low signal to noise ratio, like the previous case. This
time, macrocell users have to be protected from the small base station. Figure 2.2c illustrates
this kind of interference.
14

(a) Cell-edge between 2 macro-BSs
(b) Macro-pico (c) Macro-femto
Figure 2.2: Different types of interference. Solid lines represent association and dotted linesrepresent interference.
15

(a) Reuse factor 1 (b) Reuse factor 1/4
Figure 2.3: Reuse patterns
2.2.2 Interference Coordination
In cellular networks, interference can be coordinated using one or a combination of the
following schemes.
Frequency Domain
In this scheme, adjacent cells are assigned different frequency bands (or groups of channels)
to prevent interfering with each other. However, because of signal attenuation, a single band
can still be used in two different cells if they are located far enough apart. This is called
frequency reuse.
How often the same band can be reused is controlled by a parameter of the network design,
called reuse factor. This parameter is indicated by 1/K, where K is the cluster size, i.e. the
number of close cells that should have distinct sets of channels. The frequency pattern of
these cells is repeated over and over again to cover all the network. With frequency reuse
enabled, if the total available bandwidth is B Hz, each cell is assigned BK
Hz. There is a
trade-off in choosing K, which influences the network capacity and interference. Using a
high value of K, each cell gets a small portion of the bandwidth. Therefore, the capacity
goes down, and so does the interference. A low value for K gives a high cell capacity, since
each BS gets a wider bandwidth, but it also means that users experience more interference,
due to close co-channel base stations.
16

Not all values of K can result in a valid reuse pattern. In fact, K has to be of the form
K = i2 + ij + j2, where i ≥ 0 and j ≥ i. Common values of K are 4, 7 and 12. It should
be noted that selecting the reuse factor depends on the cell radius, density of BSs, and their
RF output power.
To increase efficiency, each cellular tower usually has a number of directional antennas
(instead of only one omnidirectional antenna), and together, they cover the whole 360 de-
grees. The area covered by each of these antennas is called a sector. In this case, reuse factor
is specified by N/K, where N is the number of sectors per BS tower. Each sector can then
use BNK
Hz of the bandwidth. A common value for N is 3. Figure 2.3 shows two sample
reuse patterns.
Instead of evenly distributing the bandwidth over all the cells (or sectors), assigning
channels to cells can be based on user demands. Moreover, channels can dynamically be
assigned to cells, controlled by a central scheduler, or distributedly. In heterogeneous net-
works, frequency domain separation can be done by assigning different frequency bands to
different tiers, and separating pico or femtocells from macrocells.
Time Domain
To further increase the granularity of resources, we can divide each frequency channel into
time slots of a predefined size. This way we have a two-dimensional table of resources.
This enables two neighboring cells to employ the same channel in different time slots, which
increases the flexibility of scheduling. Figure 2.4 shows two neighboring base stations that
are using different resources with overlapping frequencies to serve their users, without any
interference.
Power Allocation
The utilization of the network can be further increased by controlling how much power is
used on each resource block. As an example, consider Figure 2.5. If we only apply frequency
domain and time domain coordination, the same resource block (frequency channel and time
17

Figure 2.4: Interference coordination using both frequency and time domains.
slot) cannot be used by both cells. As we can see, user-1 is within a short distance of BS-A,
and the interference of BS-B on it is negligible. User-2, however, is far from its serving BS,
and receives a large amount of interference from BS-B. BS-A can send data to user-1 with
high SINR, even by using a low transmit power, whereas it has to boost its output power
in order to send data to user-2. As illustrated in Figure 2.5, both BSs can use the entire
spectrum if they keep the RF output power low for their close users (1 and 4), and only use
high power for their distant users (2 and 3). Of course, they need to interact with each other
in order to use different resource blocks for their cell-edge users.
2.2.3 Interference Management in LTE
To maximize spectrum efficiency, LTE is designed with frequency reuse factor of 1. This
means there is no frequency band separation between neighboring cells, and all cells can
use all the frequency channels. This way there is no need for band-assignment during cell-
planning, and new base stations can be added easily and without requiring major changes.
The disadvantage is that there is a high probability of a resource block used by two adjacent
cells, which may result in excessive interference on users. Here, we briefly explain the most
18

Figure 2.5: Variable power allocation. Darker resource blocks indicate high output powerand are allocated to cell-edge users.
recent solutions proposed by 3GPP to coordinate the interference in LTE networks. To
achieve the interference coordination provided by these mechanisms, base stations need to
directly talk to each other and exchange information about their users and resources. This
can be accomplished through X2 interface in the base stations designed for LTE networks.
For more information on X2 interface, see [10].
Inter-Cell Interference Coordination
Inter-Cell Interference Coordination (ICIC) was introduced in 3GPP Release-8 in 2009. It
is designed to address interference on cell-edge users. This mechanism can be implemented
in three different ways as described below.
In the simplest case, neighboring cells can use resources in a mutually exclusive manner.
This means that no adjacent cells transmit to their users at the same frequency channel and
time slot. This eliminates inter-cell interference in neighboring cells and greatly improves
SINR at cell-edges. The downside is that resources are not fully utilized, and it impacts the
total throughput of the network.
To improve this, in the second method, base stations use all their resources to schedule
nearby users. For cell-edge users, however, they negotiate with their neighboring BSs to
19

Figure 2.6: ABS subframes (red) are dedicated for small-cells. Regular (blue) subframes areused by both cells.
make sure no resource block is commonly used by the two cells. This greatly improves the
spectrum utilization over the previous method.
In the third scheme, dynamic power allocation can maximize the resource utilization in
the network. In this case, in addition to time domain and frequency domain interference
coordination, signals on each resource should be transmitted at a power level calculated
according to the channel conditions between the BS and UEs (same as in Figure 2.5).
ICIC was introduced before the existence of HetNets, so it does not provide a solution
for the kinds of interference emerged by deploying small cells.
Enhanced Inter Cell Interference Coordination
To address new challenges of interference mitigation in heterogeneous networks, enhanced-
ICIC was introduced in 3GPP Release-10 in 2011. E-ICIC added a time-domain separation
scheme to the existing ICIC, to protect small-cell users from interference of macrocells. In
particular, a certain number of subframes, known as Almost Blank Subframes, are dedicated
to picocells (Figure 2.6). During ABS subframes, macrocells refrain from transmitting any
data signal to their connected users. They still transmit necessary control signals in order to
20

(a) eICIC scheme (b) feICIC scheme
Figure 2.7: RF output power of a macrocell in almost blank subframes
manage their cells, though. Even these control signals are sent using a lower power level than
that of regular frames. This is why they are called almost blank subframes. In these ABS
subframes, picocells can reach their users without the massive interference from macrocells.
One good approach to exploit ABS subframes by picocells is to allocate them for the
users that are connected to the picocell through range expansion mechanism, because these
are the users who suffer most from macrocell interference.
Further Enhanced Inter Cell Interference Coordination
Further Enhanced ICIC was introduced by 3GPP Release-11 in 2013 to address some of the
drawbacks of eICIC. Almost blank subframes provide a good protection for picocells, but at
the cost of wasting some resources in macrocells. By applying eICIC, picocells can transmit
on the whole range of subframes, whereas macrocells, which usually have more users, have
to stay completely blank on ABS subframes. One of the main new features of feICIC over
eICIC is introducing reduced power almost blank subframes. In this scheme, instead of being
totally silent on data channels, macrocells keep transmitting data even on data channels
(although with a lower power) in order to at least serve their center users (Figure 2.7). This
ensures that wasted capacity of the macrocells is minimized.
2.3 Self-Organizing Networks
The problems of associating users to cells, and allocating a cell’s resources to its associated
users, are essentially correlated. To allocate resources among users, a cell needs to know
21

how many users are connected to it, and what the channel condition between each user and
the base station is like. This way each base station can maximize the throughput of its cell
according to some utility definition. In addition, to wisely associate users to base stations,
information about load and congestion of different cells is required.
What a network operator would like to maximize is the aggregate throughput of the
network, not individual cells. To attain this goal, these two problems (user association and
resource allocation) should be tackled together. This requires BSs to be aware of other
BSs using some sort of communication to exchange information. For example, suppose
we want to configure the amount of almost blank subframes for a base station. A static
configuration might waste the resources on the macro-BS, by allocating too many ABS
subframes, or it can starve micro-BS users by assigning insufficient dedicated subframes.
By exchanging information and employing a dynamic approach, the system can configure
the ratio of ABS subframes to optimize the network operation. As another example, to
enhance the throughput of the users in cell edges, as discussed earlier, neighboring cells need
to exchange information in order to allocate proper resources and transmit power.
The urge to facilitate network planning has led to the rise of Self-Organizing Networks
(SONs). The concept of SON was introduced in 3GPP Release 8 to automate management,
planning and configuration parameter adjustment of the network, and to optimize and ac-
celerate the process. Base stations have many configuration parameters, some of which
are discussed above, e.g., the ratio of ABS subframes, frequency bands, RF output power,
antenna tilt, etc. A SON tunes these parameters for each BS using information from the
BS itself, other cells, and also user measurements, with the goal of optimizing the network
including coordinating interference and maximizing throughput.
Other functionalities of a SON include plug and play deployment of base stations. With-
out a self-organizing paradigm, many parameters should be set to install each new base sta-
tion. These parameters reside not only in the new BS, but also in other cells that are going
22

to cooperate with it. In a self-organized network, these parameters are set by software deliv-
ered to network operators by infrastructure vendors. Once the new BS is powered on, it gets
registered to the network, detects its neighbors, and declares its existence to the neighbors.
Likewise, removing BSs can be automated using these strategies. In case of failure in one
BS, the network gets informed and tolerates the loss by adjusting the parameters of other
BSs to cope with the situation until the problem is fixed. Without self-organization, even
detecting failures would be difficult.
Implementing a self-organizing network can be done centrally or distributedly. In central
paradigms, all the base stations send their own measurements and the information obtained
from UEs to some central entity. Having the information from a wide region, this entity
calculates the proper parameters for each cell according to some network operator’s policy,
and sends back the tuned parameters to each BS. These schemes are provided to 2G, 3G, and
4G network operators by 3rd party suppliers. The software on the central entity should be
multi-technology aware, since in each geographical area operators with different technologies
or generations may co-exist and they should peacefully operate without disrupting each other.
They also should be aware of multiple vendors, since radio devices even in one network come
from different vendors and they are not necessarily fully compatible on their own, and need
a 3rd party software to coordinate them.
3GPP Release 8 introduced distributed self-organizing schemes for LTE networks. Base sta-
tions, known as eNodeBs or eNBs in LTE networks, have an interface (possibly virtual)
dedicated for directly talking to other eNBs and exchanging load and interference related
information. This enables the BSs to share the required information in a local neighborhood,
and without needing a central entity, they can optimize their own parameters. To this end,
Automatic Neighbor Relations (ANR) is specified by 3GPP and is implemented in eNBs.
Each eNodeB usually runs multiple cell sectors. Each cell broadcasts its global identifier
to announce its existence. An ANR-enabled eNodeB maintains a Neighbor Relation Table
23

(NRT) for each cell, which stores identifications of its neighboring cells. Neighbor detec-
tion function of ANR finds the neighboring cells newly installed in the network. Likewise,
neighbor removal function detects and removes outdated cells.
In addition to direct talking, an eNB can instruct its UEs to perform measurements
on neighboring cells. These measurements will be sent back to eNB to update the NRT.
Backward compatibility was one of the design goals of ANR. To facilitate co-existence with
previous generations of networks, an eNB can also instruct UEs to perform measurements
on different frequency bands and technologies, like 2G, 3G, and even WiMax, provided that
the UE supports those technologies.
Each of the aforementioned families of SON technologies (central versus distributed)
has its own benefits and disadvantages. As mentioned earlier in the introduction, modern
cellular networks tend to simplify the network structure and facilitate network expansion.
As a result, some entities are removed and their functionality is integrated into other entities
to have fewer devices. For instance, Radio Network Controller is removed and its role is
embedded into eNBs in LTE networks. This strategy justifies delegating other common
tasks to eNBs and removing central devices. Moreover, there are some issues with central
approaches that have to be handled. For example, consider the amount of control traffic
that has to be sent to the central scheduler, which can be multiple hops away. This traffic
consumes bandwidth that could otherwise be used for user data transfer. Another concern
when the coordinator is far from base stations is the excessive latency. This can make the
self-organizing protocol slow to react to network changes. In conclusion, distributed SON
is preferable to centralized schemes. Communicating in a local neighborhood can alleviate
these problems, although it introduces its own difficulties and challenges.
There are also hybrid SON approaches that are a mixture of centralized and distributed
mechanisms. For example, scheduling can be done frequently in a local neighborhood, and
less frequent in a wider geographical area.
24

2.4 Related Works on Self-Organization
The problem of resource management has been investigated since the early days of modern
cellular networks. A survey of channel allocation schemes in 2G networks is presented in [50],
and compares their complexity and performance. With the technology advances and new
features regularly added to current standards, this problem is going to remain a crucial
challenge in the future of mobile networks. A survey of the existing 4G cell association and
power control schemes is provided in [45], and suggestions are given to make them suitable
for future 5G networks, which will require higher data rates and lower latency.
In the following, we review various self-organization methods in the literature. In Sec-
tion 2.4.1, we investigate user association methods. Section 2.4.2 revisits interference man-
agement schemes, and Section 2.4.3 reviews the related algorithms that are methodologically
similar to our work.
2.4.1 User Association
Range Expansion Based Schemes
Various strategies for user-cell association have been proposed. Some of them are based on
range expansion concept of LTE [29, 61, 70]. In these papers, algorithms are designed to
adjust cell bias values for the purpose of load balancing. In [13], Bao and Liang proposed
a spectrum allocation scheme for heterogeneous cellular networks. They assume that every
user equipment in a cell receives equal resources, and do not solve the problem of intra-cell
resource allocation. The distribution of base stations is modeled by a homogeneous Poisson
Point Process (PPP) for each tier of BSs. UEs are also modeled by a PPP distribution,
and a user is considered to be covered if it receives a signal above a certain threshold from
a base station. By maximizing the probability of coverage, they compute how much of the
spectrum should be given to each tier. They also address the user association problem by
finding a cell bias value that is achieved in Nash equilibrium.
25

Corroy et al. [23] proposed another cell association mechanism based on range expansion
for heterogeneous networks. In this work they derive upper bounds for both sum rate and
minimum rate of users, and then they propose a heuristic bisection algorithm that performs
close to the upper bound and decides whether the user should connect to a macro-BS or a
micro-BS. They have simulated their algorithm in a network with only one macro-BS and
one micro-BS working on the same frequency.
Assignment Variable Based Schemes
In other user association methods, an association variable xij is defined in a larger opti-
mization problem. After solving the optimization problem, a value of 1 for xij means that
user-i is connected to BS-j. This problem, known as Generalized Assignment Problem in
mathematics, is combinatorial and NP-hard, and cannot be efficiently solved for a real net-
work. Therefore, in some solutions the assignment problem is approximated using a heuristic
method. For example, Chen et al. [20] suggested an algorithm to optimize channel allocation
and access point association in WLANs. This algorithm maximizes the aggregate through-
put based on a fairness metric. The optimization problem is solved using Discrete Particle
Swarm method and the output of the algorithm is the bandwidth associated to each access
point and the association of users to APs.
In other solutions, the integer constraint on the assignment variable is relaxed and the
problem is solved as a convex problem, and then the values are rounded to integers according
to some algorithm [29].
Sometimes to simplify the problem, single-cell association requirement for users is relaxed
and users are allowed to connect to multiple base-stations [36,39,72].
Handover Based Schemes
Another solution is to initially associate users to a cell, and then find the optimal associa-
tion by iteratively performing handover between BSs [66]. In [24], an algorithm is designed
to distributedly converge to the optimal network association considering fairness for user
26

throughputs. It models an area with multi-technology wireless networks, e.g. GSM, LTE,
WiFi, and WiMax. The user association is performed through handovers from one cell to an-
other, employing heuristics to avoid excessive handovers. The iterative algorithm suggested
in this paper is guaranteed to converge to the Nash equilibrium of the system.
2.4.2 Interference Coordination
Tier Based Coordination
For interference coordination, one proposed family of approaches is to use different frequen-
cies for different tiers of HetNets [36,39]. In [36], three different channel allocation methods
are studied: Co-Channel Deployment (CCD) in which each BS transmits on all sub-bands,
Orthogonal Deployment in which some sub-channels are dedicated exclusively for picocells
and others are dedicated to macrocells, and Partially Shared Deployment (PSD) in which
some sub-channels are dedicated for picocells and others are shared between all BSs.
Das et al. [27] modeled a CDMA 3G network with universal frequency reuse. They
have proposed 4 different algorithms for load balancing in such networks: A static method,
Fast Cell Site Selection, a coordinated scheduler, and a two-tier scheduler. In the static
scheduler, each BS independently schedules the users based on a long term average signal.
In FCSS, users are assigned to base stations with strongest instantaneous received signal.
Coordinated scheduling is a centralized scheme that assumes knowledge of all instantaneous
channel conditions between BSs and users. In the two-tier scheme, a centralized scheduler
decides which base stations remain active, and each active base station selects particular
users.
ABS Subframes
Some papers exploit ABS subframes to coordinate the interference. For example, [21] con-
siders a heterogeneous cellular network modeled using PPP distribution. Downlink scenarios
are analyzed using stochastic geometry, and the number of ABS subframes is optimized to
27

minimize the outage probability. They have modeled two separate scenarios for finding the
number of ABS subframes: Macro/femto scenario and macro/pico scenario. They concluded
that in both cases using almost blank subframes is advantageous. Based on their results,
the interference in macro/femto scenario is tolerable and using ABS subframes improves the
performance moderately. In macro/pico scenario, the effect of ABS subframes on interfer-
ence is substantial and the performance improvement obtained by optimizing the number of
ABS subframes is considerable.
Power control is also used in some suggested algorithms to optimize network throughput
[19,43]. These papers propose distributed user association and power allocation schemes for
cellular networks.
Backhaul Aware Schemes
In [28], a backhaul-aware algorithm is designed for the user association problem to maxi-
mize the network throughput. Considering capacity and constraints of each base station, a
heuristic method is presented to balance the traffic among cells and the results are compared
to the classical SINR-based user association.
In [16], Bottai et al. proposed a network model for estimating the power consumption
of dense LTE small cells. This paper studies a dense heterogeneous network such as in a
crowded public place or in offices, and takes into account the backhaul network including
switches and link capacities. They have compared the energy consumption of their model
with two reference policies of user association. The goal of this paper is to minimize the
energy consumption, without ensuring a fair load balancing throughout the network. The
assumption here is that all BSs, even from different tiers, use the same transmit power. In
their algorithm, all the base stations are initially assumed powered off. A base station is
turned on when a user cannot find a suitable working base station, and has to connect to
one of the idle BSs.
28

2.4.3 Gibbs Sampling Based Methods
Gibbs Sampling is the basis of our proposed algorithm, and has been employed by a few
other algorithms in the literature for distributed network management. A thorough review
of Gibbs Sampling is provided in Chapter 3. In this section, we investigate Gibbs Sam-
pling based algorithms proposed for self-organized wireless networks.
Kauffmann et al. provided a method for self-organization of interfering WiFi networks
[51]. This paper separately addresses two problems in densely deployed IEEE 802.11 wireless
networks. They first assign a channel to each access point in order to minimize interference,
using a Gibbs Sampler in which the nodes of the graph are APs of the network. Then
assuming that channels are assigned to APs, they design another Gibbs Sampler for user
association, in which vertices of the graph are WiFi clients.
A similar approach for cellular networks is offered in [19]. First, they target the problem of
power control for base stations, assuming each user is connected to the closest BS. Then they
relax this assumption and address the user association problem using Gibbs Sampling, and
then generalize their algorithm to jointly optimize both problems using one Gibbs Sampler.
The algorithm in [56] uses Gibbs Sampling to find the optimal location for deployment of
small cells in heterogeneous networks. This method keeps relocating small cells in predefined
directions until the value of a utility function is maximized.
From a methodological point of view, the work in [11] comes closer to our algorithm.
This paper investigates dynamic activation of base stations to reduce energy consumption in
traditional homogeneous cellular networks using a solution based on Gibbs Sampling. Our
algorithm extends the work in [11] by considering a heterogeneous network and introducing
ABS subframes into macrocells.
29
Chapter 3
Optimization Techniques
Optimization techniques are essential to cellular network algorithms, especially in resource
allocation, user association and power management problems. Most algorithms require maxi-
mization of a utility (fitness) function or minimization of a cost (loss) function. Optimization
problems are divided into two categories: In continuous optimization problems, variables take
their values from continuous sets of numbers. On the other hand, variables in combinatorial
optimization problems assume their values from a discrete set of data. In our methodology,
we need to solve a continuous and convex optimization problem, as well as a combinatorial
optimization problem. This chapter reviews the optimization techniques that are relevant
to this work. In Section 3.1, we briefly revisit convex optimization problems, and in Sec-
tion 3.2, we explain the algorithm that is used for the combinatorial part. More specifically,
Section 3.2.1 reviews several related concepts such as Markov chains and Markov random
fields. Section 3.2.2 presents Gibbs distribution, specifies how it is related to Markov fields,
and describes Gibbs Sampling. Simulated annealing is discussed in Section 3.2.3. Finally,
using an example, Section 3.2.4 shows how Gibbs Sampling can be used to solve a network
optimization problem.
3.1 Convex Optimization
Convex optimization is a well-studied field, and inspecting all the techniques in this area
would be beyond the scope of this work. This section gives a brief introduction to the topic,
and for more information on convex optimization methods, we refer the reader to [17].
Convex optimization problems are subclasses of optimization problems in which the ob-
jective function is convex. In general, this property makes the problem easier to solve. For
30

x1 x2
f(x)
Figure 3.1: A convex function. The line segment between any two points (x1, f(x1)) and(x2, f(x2)) lies above the function.
instance, in a convex optimization, every local extremum is also a global extremum.
A convex set is a set with the following property: For every pair of points in the set,
every point on the straight line segment between the two points is also in the set.
A function f : X → R is a convex function if X is a convex set and
∀x1 6= x2 ∈ X ,∀θ ∈ [0, 1] : f(θx1 + (1− θ)x2) ≤ θf(x1) + (1− θ)f(x2). (3.1)
Geometrically, it means that the line segment between any two points (x1, f(x1)) and
(x2, f(x2)) on f lies above the graph of the function (Figure 3.1). Similarly, a function
f : X → R is a concave function if X is a convex set and
∀x1 6= x2 ∈ X ,∀θ ∈ [0, 1] : f(θx1 + (1− θ)x2) ≥ θf(x1) + (1− θ)f(x2). (3.2)
If we replace the inequality ≤ in Equation 3.1 with strict inequality <, the resulting function
is called strictly convex.
Let f : Rn → R be a convex and twice differentiable function. We want to solve the
following optimization problem:
minimize f(x) (3.3)
by finding the optimal point x∗. We assume that the optimal point exists and the problem
is solvable.
31

In general, the problem (3.3) should be solved numerically, although for a very few special
cases of f , it can be analytically solved. Next, we review some of the iterative methods to
solve convex optimization problems.
Gradient Descent Method
Gradient descent method is an iterative method to find local optima, and in case of convexity,
global optima of multivariable functions. The steepest direction of f at any point is the angle
that the gradient of the function indicates. Intuitively, by going in the opposite direction of
the gradient at that point, we get the fastest decrease in the value of the function. This is
possibly the best direction to move toward the minimum of the function from any point.
We begin with an initial guess x0 for the minimum. Then iteratively, we calculate the
subsequent values of the series x0,x1,x2, . . . using
xn+1 = xn − t∇f(xn) (3.4)
where ∇f(xn) is the gradient of f at xn, and t is a small positive number called the step
size. We will have
f(x0) ≥ f(x1) ≥ f(x2) · · · (3.5)
which can be visually verified. The step size value can be changed from one iteration to
another. If this value is small enough and some certain assumptions are held, gradient
descent is guaranteed to converge to the minimum of the function [17]. Note that if f is
not convex, this minimum may be local and in this case gradient descent may not be able
to find the global minimum. The process of finding a proper step size is called line search.
Line search can be exact or inexact. In exact line search, t is chosen to minimize f along the
gradient direction:
arg mint≥0
f(x + t∇f(x)). (3.6)
The cost of calculating (3.6) is sometimes much more than the cost of finding the gradient.
In these cases, inexact methods such as backtracking line search can be used to approximate
32

the best value for the step size [17].
Newton’s Method
Newton’s method is another iterative method to find minimum points of twice differentiable
convex functions. In numerical analysis, it is used to find successively better approximations
to the roots of a function. Considering the fact that a minimum (maximum) of a convex
(concave) function f is a root of the derivative f ′, we can apply Newton’s method on f ′ to
find stationary points of f . If f is convex, the stationary point will be an extremum point
of the function, otherwise it might also be a saddle point [3].
The second-order Taylor approximation of f at x is given by
fT (x + ∆x) = f(x) +∇f(x)T∆x +1
2∆xT∇2f(x)∆x (3.7)
which is a quadratic convex function of ∆x. In this equation, ∆xT is the transpose of ∆x
and ∇2f(x) is the Hessian matrix of f at x, which is a square matrix of second-order partial
derivatives of f . To minimize this function, its derivative with respect to ∆x must be zero,
which happens when:
∆x = −∇2f(x)−1∇f(x). (3.8)
In fact, at each iteration, we are approximating the function f with a quadratic function fT ,
and choosing the minimum of fT as an estimate of the minimum of the main function. If f
is already a quadratic function, we can find the exact minimum point x∗ in one iteration.
Now we can construct the sequence xn that, under certain conditions (see [17]), converges
to the minimum of the function f :
xn+1 = xn − t∇2f(xn)−1∇f(xn) (3.9)
where t is the step size, as in the gradient descent method. In terms of number of iterations,
Newton’s method is much faster than the gradient descent method in finding the minimum
of functions.
33

Although Newton’s method can converge to the minimum in rather few steps (depending
on the function’s curvature), each step is usually computationally expensive, which makes
the whole process slow. This is because at each step, the Hessian matrix of the function at
the current point has to be calculated, which in most cases is not a trivial task.
Alternatively, one can use quasi-Newton optimization methods, which are based on New-
ton’s method without needing to compute the Hessian matrix at each iteration. Hessian
matrix of a twice differentiable function f is a symmetric square matrix, and this property
is exploited in quasi-Newton methods to approximate the Hessian matrix.
3.2 Discrete Optimization
In many cases, the variables to be optimized do not accept arbitrary real numbers. For
example, the number of resource blocks that are allocated to a user in an LTE network
should be an integer number. Also, the frequency channel of an access point in a WiFi
network should be selected from a finite set of values. These types of problems, in which
the optimal solution should be found from a discrete set of values, are referred to as combi-
natorial problems. Although there exist polynomial-time algorithms for some special cases
of combinatorial problems, in general combinatorial and integer optimizations are NP-hard.
A famous NP-hard combinatorial optimization problem in the field of computer networks is
the generalized assignment problem in which a number of tasks (e.g., cellular users) should
be assigned to a number of agents (e.g., base stations).
Linear programming relaxation is one of the solutions that can be used to solve integer
optimization problems [29]. In this technique, the integer constraints are relaxed and the
problem is solved as if it was a continuous problem. Then the results are converted to
acceptable integers using a heuristic algorithm.
Metaheuristic algorithms are used to find sufficiently good solutions for integer and com-
binatorial problems. These methods intelligently sample a large set of solutions, which is
34

computationally too expensive to examine completely. For example, Tabu search [40] is
a metaheuristic used in various wireless network optimization problems including channel
assignment [42,44], assigning base stations to switches and RNCs [63,65], and reward max-
imization [49].
Evolutionary computing is another category of metaheuristics used in combinatorial op-
timizations. As an example, Genetic algorithms have been used in computer network opti-
mization problems such as sensor network planning [35,47], cellular network planning [38,58],
and location services [26,41]. Another family of evolutionary computing methods are referred
to as swarm intelligence. Some important swarm intelligence methods that are used in wire-
less network optimizations include intelligent water drops algorithm applied in [52], particle
swarm optimization ( [32]) used in cellular networks [20, 71] and sensor networks [54, 55],
and ant colony optimization employed by [31,33,37].
Branch and Bound algorithm is another technique that has applications in computer
network problems [25,48].
Unfortunately, none of the aforementioned metaheuristic methods provide optimality
guarantee. Moreover, most of the above algorithms need to be centrally executed and this
requires a considerable amount of data transfer and latency in case of large networks. In the
following sections, we explain a randomized optimization technique based on Gibbs sampling
that is employed in this work and has mathematical proof of convergence to the optimal
solution. Furthermore, this method can operate distributedly and asynchronously in a net-
work.
3.2.1 Basic Definitions
Monte Carlo Method
When analytically solving an integration problem is difficult, numerical methods are usually
the best candidates for these problems. If the problem has many dimensions and the number
of function evaluations per dimension is large, deterministic numerical integration becomes
35

f(x)
Figure 3.2: Monte Carlo integration. The points are randomly generated. The integral off(x) can be calculated by computing the ratio of the points that lie under the function (greenpoints) to the total number of points.
infeasible or impractical. In these cases, Monte Carlo methods are beneficial. Monte Carlo
methods solve a problem by repeatedly generating random numbers and counting the frac-
tion of them that obey some problem-specific properties. They are most useful to find
numerical results for problems in mathematics and physics that are too complicated to solve
analytically. Important applications of Monte Carlo methods are integration, simulation,
and optimization.
In order to find the integral of a function over a domain D, Monte Carlo method picks
random points over a superset D′ of D and checks whether each point is within D. By
computing the fraction of the sample points that fall within D, one finds the ratio of D to
D′ and knowing the area of D′, the area of D can be calculated (Figure 3.2).
Another application of Monte Carlo methods is in numerical optimization, where the
function to be minimized (or maximized) has a large number of dimensions. In order to
understand how Monte Carlo methods are used in optimization problems, we first review
some basic definitions.
36

Markov Chains
A collection of random variables representing the evolution of a system of random values
over time is called a stochastic (or random) process. A random process is formally defined
by
{Xt : t ∈ T}
where T is the time domain and Xt is a random variable representing the state of the system
at time t. The state space S of the stochastic process is the set of all possible values of Xt
variables. Stochastic processes can be classified according to their time domain T and state
space S: Discrete-time and discrete-space, discrete-time and continuous space, continuous-
time and discrete-space, and continuous-time and continuous-space.
A (discrete-time) Markov Chain is a discrete-time stochastic process with a countable
state space that satisfies the Markov property. The Markov property ensures the memory-
lessness of the system, i.e., the next state of the system depends only on the current state,
and not on the sequence of states that precede it. Mathematically, this means that
Pr(Xt+1 = s|X1 = s1, X2 = s2, · · · , Xt = st) = Pr(Xt+1 = s|Xt = st) (3.10)
whenever both sides are well-defined, i.e., when Pr(X1 = s1, . . . , Xt = st) > 0. If the right-
hand side of (3.10) is independent of t, the system is called a (time-)homogeneous Markov
chain. A transition matrix P is used to describe the state transitions of a Markov chain.
Each entry pij of this matrix is a nonnegative real number representing the probability of
transitioning from state-i to state-j.
A Markov chain is said to be irreducible if it is possible to get to any state from any state.
A finite state irreducible Markov chain is called ergodic if all of its states are aperiodic, which
means returns to any state can occur at irregular times. Let vector v be an initial distribution
over the states of a time-homogeneous ergodic Markov chain with transition matrix P . The
37

probability distribution of the Markov chain at different times is as follows:
Pr(X1) = v
Pr(X2) = vP
Pr(X3) = vP 2
...
Pr(Xn) = vP n−1
. This Markov chain eventually converges to its steady state, i.e.
limn→∞
|vP n − π| = 0 (3.11)
where vector π is called the steady state (or stationary) distribution of the Markov chain.
Markov Chain Monte Carlo Methods
Markov chains are exploited in Monte Carlo methods to build a class of algorithms for sam-
pling from a probability distribution. In Markov Chain Monte Carlo (MCMC) methods,
a Markov chain is constructed in a way that the desired results can be derived from its
steady state distribution. The number of iterations required for the convergence of such
a Markov chain to its stationary distribution is usually difficult to determine. Metropolis-
Hastings algorithm, Gibbs Sampling, and slice sampling are three well-known MCMC meth-
ods. In the next section, we describe Gibbs sampling, which is used in this work to distribut-
edly solve a discrete optimization problem.
Markov Random Fields
A random field is a generalization of a random process. In random fields, the variable
parameter, instead of being limited to values representing time, can be a member of a
topological space. Mathematically, let V be a finite set, with elements called nodes and
denoted by v, and let S be a finite set called the state space. A collection of random
variables {X(v)}v∈V with states in S is called a random field on V with states in S.
38

A random field can be regarded as a random variable. The values of this random variable
are |V|-tuples that represent the state of each node in V . We define each configuration x
of the random field to be the vector of states of all the random variables in the field, and
represent it by x = (x(v))v∈V , where x(v) ∈ S is the state of the node v. If A is a subset of
nodes of the field, x(A) = (x(v))v∈A represents the vector of the states of the nodes in A.
The configuration space SV is the set of all possible configurations of the random field.
Let G = (V , E) be a graph, or a topology where V is the set of nodes and E is the set of
edges. Let Nv be the set of nodes adjacent to node v in this graph. We assume that this
graph is undirected:
a ∈ Nb ⇒ b ∈ Na.
In this topology, Nv is called the neighborhood of node v, and the set N = {Nv}v∈V is called
the neighborhood system of this topology.
A random field is called a Markov Random Field (MRF) with respect to a neighborhood
system, if it satisfies the Markov property on that neighborhood system. The definition of the
Markov property for a random field is a generalized version of that of a random process. In
an MRF, the state of each node depends only on the state of its neighbors. In mathematical
form:
Pr(X(v)|X(V\v)) = Pr(X(v)|X(Nv)) (3.12)
where X(V\v) represents all the random variables except X(v), and X(Nv) is the set of
random variables X(a) where a ∈ Nv. This means that random variables X(v) and X(V\Nv)
are independent given X(Nv). Markov random fields with relatively small neighborhoods
are most suitable for simulation and optimization problems.
For each node v of a Markov random field, the local characteristic function P v : SV → [0, 1]
is defined by:
P v(x) = Pr(X(v) = x(v)|X(Nv) = x(Nv)). (3.13)
This function gives each state’s probability according to the current state of the neighboring
39

nodes. The local specification of a Markov random field is defined as the set {P v(x)}v∈V of
local characteristics of all the nodes.
3.2.2 Gibbs Sampling1
Gibbs Distribution
Let X = {X(v)}v∈V be a random field with states in S. Let x = (x(v))v∈V be a configuration
of X. The probability distribution
PT (X = x) =1
ZTe−
1Tε(x) (3.14)
on the configuration space SV is called Gibbs distribution, where ε(x) is a real function on the
state space SV and is interpreted as the energy of the configuration x, T is a free parameter
called the temperature, and ZT is a normalizing constant called the partition function. The
partition function on the random field X is defined as:
ZT =∑x∈SV
e−1Tε(x). (3.15)
This distribution has many applications in physics and biology to model natural phenom-
ena like ferromagnetism and neural networks. In physical models, the energy of the system
is described by local interactions that are expressed in terms of potential functions. Potential
functions are defined over cliques of the graph of interactions.
Cliques
Consider a graph G with the set of vertices V . A subset C ⊂ V of the nodes is called a clique
of the graph if and only if its induced subgraph is complete. That means any two distinct
nodes v and u of the subgraph are adjacent. Any subset containing a single node is also a
clique. If the clique C cannot be extended by adding one more adjacent node, it is called
a maximal clique. This means for a maximal clique C and a node v /∈ C, C ∪ {v} is not a
clique.
1The complete proof for the theorems in this section can be found in [18]
40

Gibbs Potential
A collection {VC}C⊂V of functions VC : SV → R is called a Gibbs potential on the topology
G = (V , E) with state space S if they meet the following conditions:
• if C ⊂ V is not a clique, then VC is zero.
• Let C ⊂ V be a clique. Consider two configurations x,x′ ∈ SV . If the state
of the nodes in the clique C is equal in both x and x′, then the value of the
function is identical for both inputs x and x′:
x(C) = x′(C)⇒ VC(x) = VC(x′). (3.16)
The second condition means that the value of each function depends only on the state of the
nodes inside the input clique.
If the energy function ε : SV → R can be written as
ε(x) =∑C⊂V
VC(x), (3.17)
then ε is said to be derived from the potential {VC}C⊂V .
Gibbs Fields and Markov Fields
A random field with Gibbs distribution (aka Gibbs Field) is a Markov random field relative
to a neighborhood system if the energy function of the Gibbs distribution (3.14) can be
derived from a potential relative to the same neighborhood system. Let X be a random field
with a state space S and a Gibbs distribution P . Let the energy function ε(x),x ∈ SV of
(3.14) derive from a Gibbs potential {VC}C∈V on the graph G = (V , E). It can be proved
that X is a Markov field on G, and the local characteristic of each node is given by:
P v(x) =e−
∑C3v VC(x)∑
y∈S e−
∑C3v VC(y,x(V\v))
(3.18)
where C 3 v means the cliques C that contain the node v. In the above equation, VC(y,x(V\v))
means the value of the function VC over a clique C where the state of all the nodes except v
is derived from the configuration x, and the state of v is y.
41

Note that the right-hand side of (3.18) only depends on the state of v and its neighbors.
So the condition (3.12) is satisfied. To derive the local specification (3.18), we first use the
definition of conditional probability:
Pr(X(v) = x(v)|X(V\v) = x(V\v)) =P (x)∑
y∈S P (y,x(V\v)). (3.19)
By splitting the energy function ε(x) into two groups of terms, the cliques that contain
the node v, and the ones that do not contain the node v, we will have:
P (x) =1
Ze−
∑C3v VC(x)−
∑C63v VC(x). (3.20)
For simplicity and without loss of generality, we have omitted the temperature variable T of
(3.14) in (3.20). Similarly:
P (y,x(V\v)) =1
Ze−
∑C3v VC(y,x(V\v))−
∑C63v VC(y,x(V\v)). (3.21)
If v is not in clique C, then VC(y,x(V\v)) = VC(x) independently of y. By replacing (3.20)
and (3.21) in (3.19), and factoring out e−∑C63v VC(x), (3.18) is found.
The local energy of node v is defined as the sum of the potential functions over the cliques
that contain node v:
εv(x) =∑C3v
VC(x). (3.22)
Using this definition, we can rewrite (3.18) as:
P v(x) =e−εv(x)∑
y∈S e−εv(y,x(V\v))
. (3.23)
This indicates that a random field with a Gibbs distribution in which the energy function
is derived from a potential relative to a neighborhood is a Markov random field. Hammer-
sley Clifford theorem [68] states that if P is the distribution of a Markov random field with
respect to a graph G = (V , E), and the joint probability density of the random variables of
this field is strictly positive, then we can write the function P as
P (x) =1
Ze−ε(x) (3.24)
42

Figure 3.3: A Markov chain interpretation of a random field with two variables and a binarystate space {0, 1}. Each node of this graph represents a state of the random field. Forexample, if the current state is (0,1), the first random variable is 0 and the second one is 1.By updating one variable at a time, the new state of the Markov chain is going to be one ofthe adjacent nodes of the current state. Transition probabilities are not given.
for some energy function ε(x) deriving from a Gibbs potential over the cliques of the same
graph G. Such a random field is also called a Gibbs field.
Gibbs Sampler
In this section, we show how a Gibbs field can be sampled or simulated. As mentioned
earlier, we can look at a random field on a graph G = (V , E) with a state space S, as a
random variable with values from the configuration space SV (Figure 3.3). If the random
field changes randomly with time, we can represent it by a Markov chain and formulate it
as a random process {Xt} where each random variable Xt represents the state of the field
at time t:
Xt = (Xt(v))v∈V . (3.25)
Let the distribution of the random field be of the form P (x) = 1Ze−ε(x). We now define the
transition probability of the Markov chain (3.25) in a way that this probability distribution
can be obtained as the stationary distribution π of the Markov chain. We know that if we
run the random process for a sufficiently long time, the state distribution of the Markov
43

chain gets close to π.
We start from an initial state x. To make a transition from state Xt = x to state
Xt+1 = y, we randomly choose only one node of the random field to update. Let v be this
node. The new state of the system will be (y(v),x(V\v)), in which all other nodes preserve
their previous state, and y(v) is chosen with probability P (y(v)|x(V\v)), which is obtained
using the local specifications given by (3.18). In Section 3.2.4, we demonstrate this process
using an example.
3.2.3 Simulated Annealing
In this section, we explain how sampling can be used to solve optimization problems. Let
f : D → R be a cost function over the discrete space D that we want to minimize. Using a
gradient descent algorithm, similar to continuous domains, one can start from a point in D
and try moving in a direction that gives a lower value for f , until no better neighboring point
is found. The problem with this approach is that it might get stuck in a local minimum.
The idea of simulated annealing is to allow the system to go to the states with higher values
according to some probability in order to escape local minima. As we try more points in D,
we reduce the probability of choosing higher values. Hopefully, at the end, the system will
be in the global minimum point. This is a heuristic algorithm and does not guarantee to
find the global minimum.
Simulated annealing can also be used in conjunction with Gibbs sampling. Let’s assume
we want to find the state with the minimum energy (or maximum probability). By adding
a variable T to the local specification in (3.23), we have:
P vT (x) =
e−1Tεv(x)∑
y∈S e−1Tεv(y,x(V\v))
(3.26)
where T is called the temperature variable. The name temperature is used to imply that this
process is simulating the annealing process in metallurgy, a technique involving controlled
cooling of a heated material to increase its ductility and reduce its hardness [4]. Initially, T
44

has a relatively large value. By sampling using the local specification in (3.26) and lowering
the temperature variable slowly enough (aka annealing), it has been shown that the samples
will eventually converge to the state with the minimum global energy [18].
3.2.4 Sample Usage
In this section, we summarize the Gibbs Sampler and using an example, we show how it
can be used to solve optimization problems in distributed environments, such as computer
networks. The general framework for distributedly optimizing an objective function provided
in [15] is the basis of our model. Consider a network represented by a graph G = (V , E),
where V is the set of network devices. For example, the devices in this network can be WiFi
access points, cellular base stations, IP routers, nodes in a wireless Ad Hoc network, etc.
We denote by Nv the neighbors of node v, which does not contain v. We assign an internal
state x(v) to each node v. This state, for instance, can represent the operating frequency
channel of a WiFi access point, the transmit power of a cellular BS, or the queue length of
a router. The values of these state variables are chosen from finite state spaces. Also, we
define a local objective function Fv for each node v. The value of this function for each node
depends only on the state of the node, x(v), and the state of its neighbors, x(Nv). The local
objective function can be, for example, the throughput of a base station, which depends on
the state (selected channel) of the BS and its neighboring BSs. The edge set E of the graph
is defined in a way such that v, u ∈ V are connected if and only if Fv(.) depends on x(u)
(which means Fu(.) also depends on x(v) since the graph is undirected).
We seek to optimize a global objective function F (.) over all the states x(V) in this
network. This function must be the sum of the individual local objective functions:
F (x) =∑v∈V
Fv(x).
Unlike many convex optimization methods, F does not have to be concave (in case of
maximization) or convex (in case of minimization). In the rest of this section, without loss
45

Figure 3.4: A sample network
of generality, we assume that the objective function is to be maximized.
In the previous sections, we showed that a random field with probability distribution
(3.14) is a Markov random field over a neighborhood system with the local specifications
given by (3.26) if the energy function can be written as the sum of potential functions over
that neighborhood. Now we show that there is a neighborhood system over the nodes of G
such that F can be written as the sum of potential functions Fc.
Let’s assume we want to update node b in Figure 3.4. Initially, nodes are assigned an
arbitrary state. Node b asynchronously updates its own state x(b) to a new state y(b) using
the following probability distribution:
Pr(y|x(V\b)) =e
1TF (y,x(V\b))∑
y′∈S(b) e1TF (y′,x(V\b))
(3.27)
where S(b) is the state space of node b. As we mentioned above, the global objective function
F is the sum of the local objective functions. When calculating (3.27) for node b, we can
write F as:
F (x) = Fb(x) +∑v∈Nb
Fv(x) +∑
v/∈{b}∪Nb
Fv(x) (3.28)
One can observe that after factorization, the right-hand side of (3.27) when updating node b
only depends on Fa, Fb and Fc, and is independent of Fd and Fe. The reason is that the last
term of (3.28) can be factored out from the numerator and denominator of (3.27). Thus,
node b must only be able to calculate its own objective function Fb, as well as its neighbors’
Fa and Fc. In order to calculate the latter functions, node b needs to know the state of
46

Figure 3.5: Two-tier neighborhood of Figure 3.4. Dotted edges are added to the originalgraph.
the neighbors of nodes a and c. Therefore, without any knowledge of x(e), and by knowing
the state of its two-tier neighbors x(a), x(c) and x(d), node b is able to find the probability
distribution (3.27) for the next update.
In some special cases, however, knowledge of the direct neighbors are enough, and node
b can calculate the probability distribution (3.27) without knowing x(d). For example, if
Fc(x(c), x(b), x(d)) can be written as the sum of two separate functions F 1c (x(c), x(b)) +
F 2c (x(c), x(d)), then node b does not need to calculate F 2
c , since it does not depend on b and
will be factored out in (3.27) because of the exponential nature of this probability function.
We define the two-tier neighborhood N 2v of node v as
N 2v = {u ∈ Nw|w ∈ Nv, u 6= v} (3.29)
and denote by G′ = (V , E ′) a new graph, called Gibbs sampler graph, in which the nodes are
the same as the original graph G, and two nodes are connected if they are in the two-tier
neighborhood of each other. Note that if u ∈ N 2v , then v ∈ N 2
u . Two-tier graph of Figure 3.4
is shown in Figure 3.5.
If u1 and u2 are neighbors of v in the original graph G, then u1 and u2 are adjacent edges
in G′. This means that for any node v, the set N+v = Nv ∪ {v} forms a clique on the Gibbs
sampler graph G′. Remember that Fv depends only on the state of v and its neighbors.
Therefore, we have found a neighborhood system G′, and a set of (potential) functions Fv
on cliques of G′ that add up to the global energy function F . So according to Section 3.2.2,
47

state variables xv form a Markov random field with a steady state distribution given by
(3.14) where ε(x) = −F (x) and local specification given by (3.26) where
εv(x) = −∑u∈N+
v
Fu(x(N+u )). (3.30)
Note that the utility functions are prepended by a minus sign, in order to cancel out the
minus in the Gibbs measure. The minus sign is used in the original formulation to emphasize
the minimization of the energy function. Thus, using simulated annealing described in Sec-
tion 3.2.3 and an appropriate speed for temperature reduction, the state with the maximum
probability can be found, which according to (3.14) yields the optimum value of the global
objective function.
48

Chapter 4
Methodology
In this chapter, we describe the methodology used in this work. Specifically, in Section 4.1,
we identify the contributions and specify the assumptions. Section 4.2 describes the system
model and formulates the optimization problem. The proposed distributed algorithm to
solve the optimization problem is explained in Section 4.3.
4.1 Overview
We develop an algorithm to solve an optimization problem that models the trade-off between
total throughput of the users and energy consumption of the base stations in a heterogeneous
cellular network. To this end, we find the answer to the following questions:
1. Which base stations should remain active and which ones should be powered
off in order to save energy and maintain a high throughput?
2. In each macro-BS, what proportion of a frame duration should be dedicated
to ABS subframes?
3. What is the optimal output RF power level for a macro-BS during ABS sub-
frames?
4. How many subframes should be allocated to each user during a radio frame?
The main advantage of our algorithm is that it works in a distributed fashion. That means
there is no need for a central scheduler and BSs only communicate and exchange information
in a local neighborhood, and yet the system achieves global optimality. We also consider
fairness when allocating resources to users in order to prevent starvation of some users.
49

4.2 System Model
4.2.1 General Assumptions
The following general assumptions have been made in this work. These assumptions are
commonly made in the literature as explained below.
• There is no limit to the amount of data that a user receives. That is, there is always a
packet available to be sent to each user. This is known as the infinite backlog model in
the literature.
• We only focus on downlink traffic, where data is sent from BSs to users. Orthogonal
channels are used for uplink and downlink, and there is no interference between them (as
in [19]).
• Our algorithm can be adapted for slowly varying dynamic topologies (as in [51]). We
assume the rate of users joining and leaving the network is slow compared to the time
scale on which the scheduler operates (e.g., minutes compared to milliseconds).
• The energy cost of powering a BS on or off is negligible and not considered in the model
(e.g., see [16,64]).
4.2.2 Network Topology
Consider a heterogeneous cellular network with a set of base stations B consisting of macro-
BSs B(M) and pico-BSs B(P). Each base station b ∈ B has a maximum transmit power
PMaxb , and periodically transmits a reference signal at this power. We denote by U the set
of user devices of the network. The strength of the reference signal received by user u from
base station b is given by
P(R)u,b = PMax
b Hb,u (4.1)
where Hb,u denotes the channel gain between BS b and user u, which includes all propagation
impairments such as path loss and fading.
50

Each user u receives reference signals from possibly several base stations. Theoretically,
the signal from every base station, no matter how far, can be heard by u. In practice,
however, a receiver has a sensitivity threshold and cannot detect signals that are too weak.
Thus, if the signal strength is too weak, it can be ignored by the user, since it has no
significant effect on the data rate of the receiver. This assumption is widely used in the
literature [20, 29, 57]. So the set of base stations that can serve or impact the rate of a user
u is defined as
Bu = {b ∈ B|P (R)u,b ≥ θ} (4.2)
where θ is a constant threshold known by all the nodes in the network. We assume that the
base stations are deployed in a way such that Bu is non-empty for all the users:
∀u ∈ U : ∃b ∈ B, b ∈ Bu. (4.3)
In practice, a user u is served by the base station bu that can provide the strongest signal
to u, that is,
bu = arg maxb∈Bu
P(R)u,b , (4.4)
where bu can be either a macro-BS or a pico-BS. The value of the variable bu is not fixed
during the runtime of the algorithm, and depends on the state of base stations. For example,
by shutting down a pico-BS, the users previously connected to it should now be offloaded to
their next best candidate BS.
4.2.3 Frame Structure
We consider one frequency channel that is divided into frames of a specific length. Each frame
is further divided into smaller subframes. Base station b schedules subframes of each frame,
i.e., allocates subframes to its users denoted by Ub. Subframes are not evenly distributed
among the users. In fact, the fraction of subframes that are dedicated to a user depends on
its signal to noise ratio with the goal of maximizing the throughput of the cell. Note that
scheduling is not necessarily performed for each individual frame. A base station may repeat
51
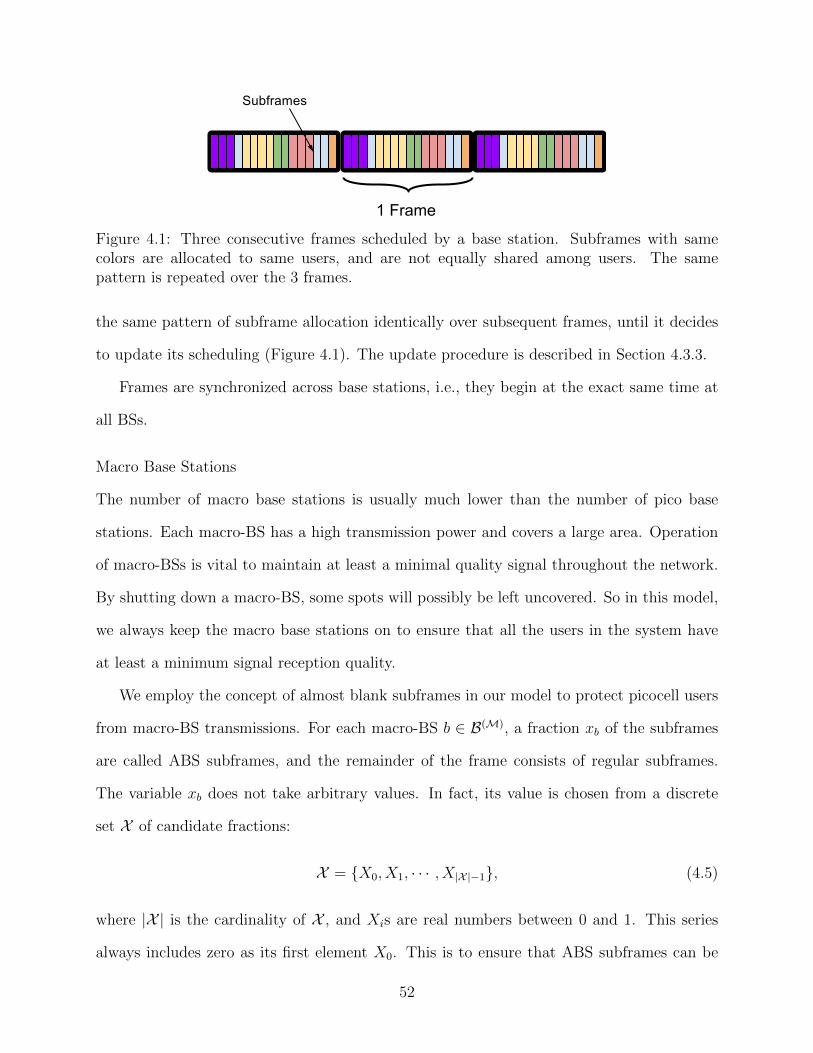
Figure 4.1: Three consecutive frames scheduled by a base station. Subframes with samecolors are allocated to same users, and are not equally shared among users. The samepattern is repeated over the 3 frames.
the same pattern of subframe allocation identically over subsequent frames, until it decides
to update its scheduling (Figure 4.1). The update procedure is described in Section 4.3.3.
Frames are synchronized across base stations, i.e., they begin at the exact same time at
all BSs.
Macro Base Stations
The number of macro base stations is usually much lower than the number of pico base
stations. Each macro-BS has a high transmission power and covers a large area. Operation
of macro-BSs is vital to maintain at least a minimal quality signal throughout the network.
By shutting down a macro-BS, some spots will possibly be left uncovered. So in this model,
we always keep the macro base stations on to ensure that all the users in the system have
at least a minimum signal reception quality.
We employ the concept of almost blank subframes in our model to protect picocell users
from macro-BS transmissions. For each macro-BS b ∈ B(M), a fraction xb of the subframes
are called ABS subframes, and the remainder of the frame consists of regular subframes.
The variable xb does not take arbitrary values. In fact, its value is chosen from a discrete
set X of candidate fractions:
X = {X0, X1, · · · , X|X |−1}, (4.5)
where |X | is the cardinality of X , and Xis are real numbers between 0 and 1. This series
always includes zero as its first element X0. This is to ensure that ABS subframes can be
52

disabled for a macro-BS if it is not required, e.g., when there is no pico-BS operating close
to the macro-BS, or when for any other reason having ABS subframes does not improve the
utility of the network. The rest of the numbers, Xis when 0 < i < |X | form an ascending
series:
∀i, j ∈ Z+|X |−1 : i < j → Xi < Xj. (4.6)
The difference between ABS and regular subframes lies in the amount of transmission
power allocated to them. In regular subframes, each macro-BS b transmits data signals to its
associated users at its maximum available power PMaxb . To comply with feICIC technology
(see Section 2.2.3), in ABS subframes, macro-BSs use a lower power level to mitigate the
interference on picocells. For a macro-BS b, this reduced power level is represented by a real
number yb that is used to scale the transmission power of the base station b as
yb · PMaxb . (4.7)
Equivalently, yb is the fraction of the maximum power that is used during ABS subframes.
Similar to xb variables, ybs are also selected from a discrete set Y = {Yi}0≤i<|Y| of candi-
date power level ratios. We have
Y = {Y0, Y1, · · · , Y|Y|−1}. (4.8)
Similarly, Yis are real numbers between 0 and 1, and zero is included as Y0 to be able
to have zero-power almost blank subframes when it is really necessary to mute all the data
transmissions from a macro-BS during ABS subframes in order to maximize the total network
throughput. The remaining numbers construct an increasing sequence of ratios:
∀i, j ∈ Z+|Y|−1 : i < j → Yi < Yj. (4.9)
The variables xb and yb are assigned per macro-BS and may differ from one BS to another.
This adds a degree of freedom to our method, compared to the approaches with a unified
fraction of ABS subframes all over the network, as in [72]. In those cases, some macro-BSs
53

Figure 4.2: A sample frame structure for a macro base station. The green area shows ABSsubframes with reduced signal power. The blue area shows the regular subframes withmaximum transmission power. In this figure, the set X of possible options for fraction ofABS subframes contains 4 elements. The BS has selected X2, while X1 and X3 are shownby dotted lines, and X0 lies on the left edge of the frame.
may waste their resources by having a large ABS ratio without the existence of any picocell
in their vicinity. On the other hand, some loaded picocells may suffer from having short
ABS durations, in order to maximize the net throughput with this restriction. In our model,
however, macro-BSs adjust their ABS duration based on the picocells in their neighborhood.
The same is true for the signal power level in ABS subframes. Each macro-BS can utilize
these subframes according to its neighboring picocells, and can vary in the range of zero
transmit power, like in eICIC, to power levels close to PMaxb .
Note that the sets X and Y are pre-defined and known to all macro base stations. Also,
ABS subframes will all be placed in the beginning of each frame by the scheduler in macro-
BSs. This makes it possible for a picocell to have some macro-transmission-free subframes
at the beginning of each frame, unless one of its neighboring macro base stations has decided
not to have ABS subframes.
Figure 4.2 depicts a frame from the point of view of a macro-BS.
Pico Base Stations
Pico base stations are less expensive and have lower transmit powers compared to macro
ones, and are situated in coverage holes or densely populated areas. For example, they
may be located near sport stadiums, shopping malls, or movie theatres. In these places,
the demand varies greatly over time, e.g., based on the events that are taking place. The
presence of a pico-BS might be unnecessary when it is only serving very few users, and it
might not be cost effective to have it running due to its power consumption.
54

Figure 4.3: Transmit power of a pico base station in operating state during a frame. Through-out the frame, the pico-BS uses the maximum available power for transmission. CandidateABS ratio for macro-BSs is the same as in Figure 4.2.
In our model, pico base stations can be in one of two states. If having them in operational
state is not advantageous, we switch them to standby (sleep) mode. In standby mode, a pico-
BS is almost shutdown, except for a small processor and accessories that allow it to contact
other base stations and see whether it should wake up or not. So it neither broadcasts a
reference signal nor serves users in standby mode, and users are not aware of its existence.
That means the transmission power of a pico-BS in this state is zero and it has no interference
on the users.
If, on the other hand, the density of users close to a pico-BS is high, it is powered on.
In this mode, in contrast with macro base stations, a pico-BS b always transmits at its
maximum power level PMaxb and does not have ABS subframes. We denote by a binary
variable zb the state of a pico-BS b:
zb∈B(P) =
1 b is fully functional
0 b is in standby mode
(4.10)
Figure 4.3 illustrates the transmit power of a picocell during a frame.
Interference on Users
The amount of interference on a user depends on the status of its neighboring base sta-
tions and varies even during one frame. For instance, a user of a macrocell suffers from
less interference when a neighboring pico-BS is powered off. Moreover, because different
macro-BSs may have different fractions and powers for ABS subframes, the amount of in-
terference changes within a single frame. To better understand this, consider the network
in Figure 4.4. User U1 is served by the base station A and interfered by B, C and D. The
55

Figure 4.4: Multiple macro-BSs interfering with a user. U1 is served by base station A. OtherBSs have different number of ABS subframes. During the subframes in green rectangles,macro-BSs are in ABS mode. During the rest of the frame (Blue area), macro-BSs transmitat their maximum power. Figure 4.5 shows the interference on U1 over one frame.
number of ABS subframes varies among the interfering base stations. For example, in the
subframes between X0 and X1, all the interfering macrocells are in ABS mode, while during
the subframes between X2 and X3, only base station D is in ABS mode, and the other two
neighboring macro base stations are transmitting at their maximum power. Consequently,
the interference on U1 differs from one subframe to another.
We denote by Ti the sequence of subframes between two consecutive candidate ABS
fractions Xi and Xi+1 where 0 ≤ i < |X |. According to Figure 4.4 and the above explanation,
the interference on a user does not change within the subframes of Ti, however, it is likely
56

Figure 4.5: Interference on a user during a frame. The more pale the color is, the lessinterference the user suffers. During the last period, all the macro-BSs are at their maximumpower.
to change from Ti to Ti+1.
A user may experience a maximum of |X | different interference levels (see Figure 4.5).
Note that the actual number of distinct interference powers may be less than this number.
First of all, the number of macro-BSs in Bu may be less than |X | for a user u. Also, more
than one macro-BS may choose the same ABS fraction. For example, if all macro-BSs in
Bu select the same fraction Xi, user u will only experience two different interference levels.
Furthermore, if this Xi equals zero, then the interference on u will be constant over the
entire frame, since all the macro-BSs are transmitting at their maximum power during every
subframe of a frame.
To formulate the total interference on user u, we first define P ib as the transmit power
level of BS b during period Ti. One can simply observe that for a pico-BS, this value only
depends on whether it is on or off:
P ib∈B(P) =
PMaxb zb = 1
0 zb = 0
(4.11)
For a macro-BS, P ib depends on the ratio of ABS subframes xb and transmit power of the
BS during ABS and regular subframes:
P ib∈B(M) =
PMaxb xb ≤ Xi
yb · PMaxb xb > Xi
(4.12)
Using the above notations, we can calculate the total interference on user u during each
57

period Ti:
Intiu =∑b 6=bu
P ibHb,u (4.13)
Note that as shown in Figure 4.5, the amount of interference increases from the beginning
of the frame toward the end:
Int0u ≤ Int1u ≤ Int2u ≤ · · · . (4.14)
This happens because as time passes within a frame, more neighboring macro-BSs make
transition from ABS subframes to regular subframes.
4.2.4 User Rates
Because of the difference in both interference and signal power, the signal to interference
and noise ratio (SINR) of each user u varies in different periods Ti of a frame. It can be
formulated as
SINRiu =
P ibu
Intiu +N0
. (4.15)
As a result, base stations schedule each period separately. Each user gets a portion of
subframes of each period. To maximize the utility function, a user may get more shares in
Ti and less shares in Tj. For example, imagine that base station A has no ABS subframes
in Figure 4.4. In this case, all the subframes are equally valuable to U2, i.e., they can carry
the same amount of data, since there is no interference on this user. On the other hand, a
subframe in T1 is more beneficial to U1 than a subframe in T2, since SINR1U1
is higher than
SINR2U1
. Therefore, BS-A can allocate the beginning subframes of each frame to U1, and
U2 gets more subframes toward the end of the frame, in order to best utilize the channel.
We denote by wiu the fraction of subframes of a frame that BS b allocates to user u ∈ Ub
during Ti:
∀b ∈ B, 0 ≤ i < |X | :∑u∈Ub
wiu = Xi+1 −Xi. (4.16)
58

The right-hand side of the above equation is the ratio of duration of Ti to the frame length
(see Figure 4.5). The following equation is derived from the definition of wiu variables:
∀b ∈ B,|X |−1∑i=0
∑u∈Ub
wiu = 1. (4.17)
To map an SINR to a rate, we use the Shannon capacity formula:
ciu = B log2(1 + SINRiu) (4.18)
where ciu is the total rate that can be achieved by the user u during Ti if all subframes in Ti
are allocated to u. The parameter B is the bandwidth of the channel. Thus, the rate of user
u during the time period Ti can be obtained by the following formula:
riu = wiuciu (4.19)
Finally, the average bit rate of user u during a frame can be written as the sum of the
rates over all the periods:
Ru =
|X |−1∑i=0
riu. (4.20)
4.2.5 BS Power Consumption
For the energy consumption of base stations, we follow the model proposed in [46] and
adopted by [16] and [64]. According to this model, the energy consumption of a BS is given
by:
W =
NTX(P0 + ∆P · PTX), PTX > 0
NTX · Pidle, PTX = 0
(4.21)
where NTX is the number of antennas, P0 is the power consumption at zero RF output
power, PTX is the RF output power, Pidle is the power consumption of the base station in
standby mode, and ∆P is the slope of the load-dependent power consumption.
For simplicity, we assume the number of antennas NTX equals 1. Note that P0, Pidle and
∆P are predefined parameters. For a pico-BS b, RF output power is either zero or PMaxb . So
59

we have
Wb∈B(P) =
P0 + ∆P · PMax
b , zb = 1
Pidle, zb = 0
(4.22)
Macro-BSs have different RF powers during a frame. Thus, we calculate the average RF
power in a frame in order to find the energy consumption of a macro-BS:
PTX = xb · (yb · PMaxb ) + (1− xb) · PMax
b . (4.23)
By replacing (4.23) in (4.21), we have:
Wb∈B(M) = P0 + ∆P · PMaxb
(xb · yb + 1− xb
). (4.24)
4.2.6 Optimization Objective
We define a utility function U(.) over user rates, and a cost function C(.) over power con-
sumption of base stations. Any continuously differentiable concave function is suitable as the
utility function. The simplest choice would be the summation of user throughputs. However,
this function usually leads to a case in which each base station dedicates all its resources
to one or a few users (the ones with highest channel gain), and leaves other users starving.
Another option would be to adopt a logarithmic utility function to achieve proportional
fairness:
U(R) =∑u∈U
log(Ru), (4.25)
where R is the vector of bit rates of all users. In our simulations in Chapter 5, we evaluate
both logarithmic sum and linear sum utility functions, which are concave and continuously
differentiable.
For the power cost function, we simply add up the energy consumed by all the base sta-
tions:
C(W) =∑b∈B
Wb, (4.26)
where W denotes the vector of BS energy consumptions.
60

Finally, we denote by λ a weight factor between total throughput and total energy con-
sumption, and write the optimization objective as
F (R,W) = U(R)− λ · C(W) (4.27)
which is to be maximized. In general, throughput and energy consumption are directly
proportional. A larger value of λ increases the negative impact of energy consumption on the
objective function, and favors low-throughput and low-energy states over high-throughput
and high-energy states.
We summarize the optimization objective and the constraints in (4.28), and the set of
notations used in this model in Table 4.1.
maxx,y,z,w
F (R,W)
s.t. xb ∈ X , ∀b ∈ B(M)
yb ∈ Y , ∀b ∈ B(M)
zb ∈ {0, 1}, ∀b ∈ B(P)∑u∈Ub
wiu = Xi+1 −Xi, ∀b ∈ B
wiu ∈ [0, 1], ∀u ∈ U , 0 ≤ i < |X |
(4.28)
61

Table 4.1: Notations used in the model.
Notation Description
U Set of usersUb Set of the users that are associated to BS bB Set of base stations
B(M) Set of macro base stations
B(P) Set of pico base stationsBu Set of base stations that can serve user ubu The base station that serves user u
PMaxb Maximum RF output power of BS bP ib RF output power of BS b during Ti
P(R)u,b Received power of the reference signal of base station b at user u
yb Fraction of max RF output power that a macro-BS uses in ABS modeY Set of possible values for ybYi ith element of Yzb Binary variable indicating whether a pico-BS is in sleep modeθ Minimum received power threshold from a BS to a user in its rangexb Fraction of a frame length in which BS b is in ABS modeX Set of possible values for xbXi ith element of XTi Fraction of a frame from Xi to Xi+1
Intiu Total interference on user u during period Ti of a frameSINRi
u SINR of user u during period Ti of a frameciu Spectral efficiency of user u during period Ti of a frameHb,u Pathloss (or channel gain) between BS b and user uN0 Noise powerB Bandwidth of a frequency channelwiu Fraction of subframes of a frame that BS bu allocates to user u during Tiriu Bitrate of user u during period Ti of a frameRu Average bitrate of user u during one frameWb Average energy consumption of a base station during a frameNTX Number of antennas on a BSPidle Energy consumption of a base station in standby modeP0 Energy consumption of a running BS at zero RF output power∆P Slope of the load-dependent energy consumption of a BSPTX RF output power of a BSU(.) Utility function over user ratesC(.) Cost function over energy consumption of base stationsF (., .) Objective functionλ Weighting factor to balance bitrate and energy consumption
62

4.3 Solution
4.3.1 Overview
The optimization problem in (4.28) contains a mixture of real variables w, discrete variables
x and y, and binary variables z. Here we use an optimization technique known as meta-
optimization, in which one optimization problem is solved and the results are fed into another
one. In our case, each base station locally solves a convex optimization problem, and uses
its solution in a larger-scale distributed algorithm in order to optimize the global objective
function as defined in (4.27).
We begin by breaking the global utility and cost functions for the network into the sum
of local utility and cost functions for each BS. According to (4.26), the local cost function
can be easily written for each BS. Let Cb denote the cost of base station b. We have:
Cb = Wb. (4.29)
The global utility function (4.25) is defined over user rates. We know that each user
is associated to one base station, which is the one with the strongest received signal1. So
if we write the local utility function for each base station as a function of the rates of the
users associated to it, we obtain the global utility function as the sum of local ones over the
base stations. Let Ub denote the local utility of base station b. We have:
Ub =∑u∈Ub
log(Ru). (4.30)
Therefore, the local objective function can be written as:
Fb = Ub − λ.Cb, (4.31)
where Fb denotes the local objective function at base station b. Now the global objective
1Theoretically, a user may not be associated to any BS, for example when all the BSs in range are picoand they are all in sleep mode. This is very unlikely to happen because of the logarithmic utility functionthat returns −∞ if the rate of a user is zero. Even in that case, equation (4.30) still holds.
63

function can be written as the sum of local ones:
F (R,W) =∑b∈B
Fb. (4.32)
Evidently, to maximize the global objective function (4.27), we cannot simply maximize
each local function of form (4.31) independently of the others. Maximizing an individual
local objective would negatively impact other base stations. To see this, let’s take a closer
look at the optimization variables of (4.28). It is obvious that if a BS b modifies any of xb, yb
or zb (in case of a pico-BS), it affects the performance of some other cells. Turning a pico-BS
on or off may lead to changes in user associations, and also in the amount of interference
on users of other cells. Similarly, changing the duration and power of ABS subframes of
a macro-BS changes the interference level of users of other cells during different parts of a
frame.
On the other hand, internal scheduling of each base station, i.e., the amount of resources
that the BS allocates to each user, does not affect other cells. No matter how a BS allocates
subframes to its users, the amount of interference it imposes on the users of other cells
remains the same. In fact, BS b adjusts the values of wius in order to optimize its own utility
function, without having any influence on other cells. This is due to the fact that the RF
output power of a BS during a frame is specified by variables xb and yb. Therefore, in our
meta-optimization, we optimize wius individually for each BS in a local manner since they
only change the local utility function. The optimal values of xbs, ybs and zbs are found
distributedly by exchanging information in a local neighborhood, since these variables also
change local objective functions of other cells.
With the above explanation in mind, the next section describes how we incorporate Gibbs
Sampling described in Chapter 3 to solve the problem in a decentralized way.
64

Figure 4.6: Interaction graph.A is connected to B and C, because they have common users in their range.A is not connected to D and E, because they have no common user in their range.
4.3.2 Gibbs Sampler
In this section, we define a neighborhood system, state spaces for the nodes and local energies
in order to solve the problem using the framework in Section 3.2.4. Consider a graph G that
represents the system. Nodes of this graph are the set of base stations B, both macro-BSs
and pico-BSs. In this graph, two base stations are adjacent if they have at least one common
user in their range. That is, there is an edge between b1 and b2 if:
∃u ∈ U : b1, b2 ∈ Bu (4.33)
Figure 4.6 illustrates an example neighborhood system and its corresponding graph G. We
call this graph the Interference Graph, since connected base stations in this graph directly
interfere with each other’s users. The neighbors of a node b are denoted by Nb.
Now we define a state sb for each node b. Macro-BSs and pico-BSs have different state
spaces. For macro-BSs, the states are ordered pairs of the form (xb, yb), whereas for pico-BSs
65

the state only contains the on/off state (zb). The state spaces are defined as:
Sb =
X × Y b ∈ B(M)
{0, 1} b ∈ B(P)(4.34)
Note that the size of the state space of a macro-BS is not |X | × |Y|. The reason is that
the first element of X is zero, and if there is no ABS subframe (xb = 0), the macro-BS b
behaves the same no matter what the value of yb is. So the size of state space of macro-BSs
is 1 + |Y|(|X | − 1).
To calculate the local objective function Fb, each base station only needs to know its own
state, and the state of its neighbors. That is, each BS should be informed of whether its
pico neighbors are on or off, and what is the power and time duration of ABS subframes in
its macro neighbors. Using this information, the only missing variables to calculate the local
objective function of base station b in (4.31) are the shares wiu, u ∈ Ub of each user associated
to b. Indeed, we can verify that by knowing zb′ , xb′ and yb′ for all the base stations b′ ∈ Nb
plus b itself, each BS b is able to:
• Determine the BS that each user in the range of b is associated with.
• Calculate the signal to interference and noise ratio (4.15) for each user in its
range during different periods of a frame.
• Calculate the energy consumption of each neighboring BS using (4.22) and
(4.24).
Then to find user shares, each base station b should solve the following optimization
problem:
arg maxwi
u
Fb (4.35)
given the values of z, x, and y for b and its neighbors, and the last two constraints in the
66

main optimization problem (4.28) which are repeated here for convenience:∑u∈Ub
wiu = Xi+1 −Xi, ∀b ∈ B
wiu ∈ [0, 1], ∀u ∈ U , 0 ≤ i < |X |
Note that the problem in (4.35) is a convex optimization problem. To understand this,
recall that the values of SINR (4.15), and therefore spectral efficiency (4.18) and energy
consumption (4.22) and (4.24) become constants given the states of the nodes in the neigh-
borhood of b. Thus the local utility function becomes the sum of concave (logarithmic or
linear) functions over a linear combination of optimization variables wiu. The constraints are
also linear. Thus, problem (4.35) is an ordinary convex optimization problem that can be
solved using the standard methods in the field of convex optimization. In Section 3.1, we
briefly touched upon convex optimization techniques. Here, we leave out the full steps of
solving (4.35) and concentrate on our main contribution, which is solving the global opti-
mization problem using Gibbs Sampling.
To this end, the value of the local objective function of each node b in graph G is the
value of Fb using the following inputs:
• states z, x, and y of b and its neighbors Nb,
• the optimal solution of (4.35).
To find the local energy, as mentioned in Section 3.2.4, each node b needs to calculate
its own local objective function and those of its neighbors Nb. To find the latter, a node
needs to have the states of its two-tier neighbors. We construct the graph G′, which we call
the two-tier neighborhood graph, according to Section 3.2.4. Then each node b obtains the
states of its neighbors in G′ denoted by N 2b . The local energy of each state sb ∈ Sb based on
(3.30) is defined as:
εb(sb) =∑b′∈N+
b
Fb′ , (4.36)
67

where N+b is the set of b and its neighbors:
N+b = Nb ∪ {b}. (4.37)
To find the right-hand side of (4.36), the state of node b is given as an input of the function
εb(.), states of two-tier neighbors are fixed and obtained through communication among
neighbors as described in the next section, and shares of users are found by solving the
optimization problems of the form (4.35).
Finally, the transition probability of node b is of the form (3.26), which is defined as:
Pr(s ∈ Sb|sN 2b) =
e1Tεb(s)∑
s′∈Sb e1Tεb(s′)
(4.38)
where sN 2b
denotes the states of the base stations in N 2b .
4.3.3 Distributed Algorithm
We break the protocol into two phases. The first phase, initialization, is intended so that
the base stations become familiar with their neighborhood, i.e., the users and other BSs
that they are directly affecting. This is required in order for them to internally build their
perception of the interference graph, and also to be able to calculate user rates.
Using the information received in the first phase, BSs then start the iterative phase.
By repeatedly updating its internal parameters according to the specified rules, the system
converges to the optimal state that maximizes the global objective function given in (4.27).
Initialization Phase
Initially, all the picocells are on. Users connect to the BS with the highest reference signal
received power. Each BS b requests each of its users u to report the list of all BSs they can
hear (denoted by Bu), and their channel gains (denoted by Hb,u). Using this information, in
Figure 4.6 for example, BS A will add BS B to the list of its neighbors. BS A is still not
aware of BS C, because their mutually interfered user is connected to C. Likewise, BS B is
still unaware of BS A.
68

Then each BS sends the information gathered from its users to each of the neighboring
BSs that it has identified so far. This way, BS A will recognize BS C as its neighbor, by
receiving the list of users of C. Now every BS can make a complete list of its first tier
neighbors Nb.
Next, they exchange their maximum RF output power PMaxb , their initial state, and their
neighbor list with their immediate neighbors Nb. By processing these received lists, BSs can
construct their two-tier neighbor list N 2b . The system assumes a default initial state for
every base station, e.g., all pico-BSs are active and all macro-BSs are in full power mode.
Iterative Update Process
Once the previous phase is completed, all the BSs start the next phase at the same time.
From this point on, the iterative update process does not have to be supervised by a scheduler,
and each BS is updated independently of the others. For example, the base stations do not
have to be updated sequentially in the same order in each iteration. A BS may update its
state multiple times before another BS is updated once.
At the start of this phase, each BS b randomly chooses a timeout between 0 and τ , and
triggers an update when the timeout has expired. In an update process, a BS b selects a new
state sb from its state space, independent of its current state. To select the new state, BS
b calculates the local objective function Fb′ of every BS b′ ∈ N+b (b and its neighbors) given
each s ∈ Sb, and by adding these |N+b | objectives together, computes the local energy εb(s)
of each potential next state s 2. Then it chooses its new state according to the probability
distribution in (4.38), which is repeated here for convenience:
Pr(sb = s) =e
1Tεb(s)∑
s′∈Sb e1Tεb(s′)
. (4.39)
Here, the temperature T is a decreasing function of the time t elapsed from the beginning
of the iterative phase. This function is globally known among all BSs, and since they all
2Instead of calculating the local objective of each neighbor b′, BS b can ask its neighbors to provide theirlocal objective given the current state of b. This way there is no need for two-tier neighborhood, and eachBS only needs the information of its one-tier neighbors to compute its own local objective.
69

started the algorithm simultaneously, the temperature value remains synchronized across
all the base stations of the network. The purpose of this temperature variable is to allow
base stations to select low energy states during early stages of the iterative phase in order
to avoid getting stuck in a local optimum. As time passes, the high-energy states will be
chosen with a higher probability. An example of the temperature function is the following
( [51]):
T (t) =T0
log(2 + t). (4.40)
In Chapter 5, we evaluate this function as well as other temperature functions.
Once the BS b has selected and transitioned to its new state sb, it randomly picks another
timeout in a similar fashion to perform the next update.
If the state of b has changed in this update, it informs its two-tier neighbors. Another
option would be to inform its immediate neighbors and let them forward it to their other
immediate neighbors; however, that would cause the two-tier neighbors to receive duplicate
information from multiple neighbors.
If a pico-BS has decided to shut down as a result of an update, its users will choose their
next-best BS (if there is any). Users are constantly monitoring all the reference signals, so
once a stronger signal is heard (a pico is back on), they switch to it.
By repeating this process until convergence, the system reaches the optimal state where
each BS selects the same state at each update. At this point, the temperature is very close
to zero.
We can start the whole algorithm (from the initialization phase) over again at specific
intervals to cope with dynamic changes in the topology. During each execution, we assume
that the topology (e.g., the neighborhood system) does not change.
Speed of convergence of the system depends on the choice of the temperature function.
If we quickly decrease the temperature to zero, the convergence would be faster, at the cost
of losing optimality. Slower annealing process causes the network to take longer to converge,
70

but the energy of the converged state would be closer to that of the optimal state. In our
simulations, we observed that a few hundred iterations is enough to converge a network of
hundreds of BSs spread over a large geographical area to a near-optimal state.
71

Chapter 5
Simulation Results
In this chapter, we present a numerical study to demonstrate the effectiveness of our method
by simulating it in different scenarios. We begin with describing the simulation environment
in Section 5.1. This section also goes over some of the practical limitations of the simulation.
Next, we analyze the effect of each parameter on the accuracy and performance of the
algorithm. In Section 5.2, we run the algorithm on a HetNet and report the states of the
base stations after the convergence, e.g., which pico-BSs are in sleep mode. We also report
the throughput, energy consumption and objective of each cell, as well as the entire network.
Section 5.3 analyzes the trade-off between throughput and energy consumption. Essentially,
this section reports the statistics of the network with different values of λ in the equation
(4.27). Section 5.4 illustrates how fairly the users are served depending on the rate utility
function U(R). Section 5.5 reports the objective improvement achieved by enabling each of
the following features: zero-power ABS subframes, low-power ABS subframes, and picocell
deactivation. In Section 5.6, we investigate the outcome of our algorithm in a network
consisting of only picocells, as in [56] and [60]. Finally, Section 5.7 numerically studies the
convergence of the algorithm. In this section, we analyze 4 different factors that affect the
convergence: the temperature function, the initial temperature, duration of the process, and
the cell update rates.
5.1 Simulation Environment
We simulated the proposed algorithm in MATLAB. Two network configurations are studied
in this chapter. Throughout Section 5.2 to Section 5.5, we use a heterogeneous network
to investigate the states of both macrocells and picocells. Since macro-BSs have a large
72

state space of the size |X × Y| and all of the base stations are simulated on one machine
(contrary to the reality where each BS has its own processor), we limit the number of cells
to 19. It should be noted that this network size is adequate for prototyping purposes, and
much smaller networks have been studied in the literature, for example in [56]. For the last
two sections of this chapter, deployment of macrocells is not required. This allows us to
simulate a larger network with 400 cells, since in our model picocells have only 2 operating
states (active or sleep) as opposed to macrocells. The larger size makes the network more
suitable to graphically illustrate the convergence of our algorithm, which is provided in the
last section of this chapter.
For sections 5.2 to 5.5, we consider the cellular network in Figure 5.1, which is composed of
7 macro-BSs located in a hexagonal form. The network also consists of 12 pico base stations
located on cell edges. As in LTE networks, the frequency reuse factor is 1, i.e., all the BSs
and users operate on the same frequency. One hundred users are spread over the network
using a Poisson Point Process (PPP is a common choice for modeling users [21]). We make
sure that all the users are in the covered area and receive a signal above the threshold θ from
at least one macro or pico base station.
The large network of picocells is described in Section 5.6.
5.1.1 Simulation Parameters
Some of the parameters in Table 4.1 are algorithm-independent constants and not tunable.
For these constants, we have used the fixed values in Table 5.1 throughout all simulations.
To estimate the channel gains, we used the following path loss model:
Pr = Ptd−γ
where Pt and Pr indicate the signal power at the transmitter and receiver respectively, d is
the distance between the two, and γ is the path loss exponent with values in the range of 2
in free space to 4.5 in relatively lossy environments (see [2,67]). The parameters in Table 5.1
73

×104
0 0.5 1 1.5 2 2.5 3
×104
0
0.5
1
1.5
2
2.5
3
Figure 5.1: The simulated HetNet scenario.
are similar to the ones in [64] and mostly aligned with HetNet specific parameters considered
in [8].
Other parameters can be analyzed and by tweaking them we can change the complexity
and behavior of the algorithm and enhance the results. By default, they are defined as
follows:
• Rate utility function: We simply add the throughputs of users of a cell:
Ub =∑u∈Ub
Ru
• Objective function: As mentioned in Section 5.1.2, we use a scaling factor:
Fb = 10−4(Ub − λ · Cb)
74

Table 5.1: Simulation parameters
Parameter ValuePico-BS Macro-BS
N0 (dBm) −120θ (dBm) −90B (Hz) 5× 103
PMax (W) 0.5 20Pidle (W) 4.3 75P0 (W) 6.8 130
∆P 4 4.7γ 3.5
In this function, 10−4 is the scaling factor and λ = 200 is chosen to balance
the throughput and energy consumption.
• Initial temperature: T0 = 5
• Temperature function: We use a quadratic function with zero temperature
at tend = 103:
T (t) = T0 × (1 +t− 1
1− tend)2
• Set of possible ABS duration ratios: We consider 4 different options for
the ratio of ABS subframes:
X = {0, 1/10, 2/10, 3/10}
For instance, if a macro-BS chooses 1/10, it dedicates one tenth of subframes
of a frame to ABS mode.
• Set of possible ABS power ratios: The following 4 ratios are allowed for
ABS power ratios:
Y = {0, 1/4, 1/2, 3/4}
As an example, if a macro-BS has selected 1/2, it transmits at half of its
maximum output power during ABS subframes.
75

• Update probability: After each update, a base station refrains from updat-
ing itself for a number of iterations. This number is chosen randomly each
time from [0, τ ], where τ = 10.
Unless otherwise stated, the above parameters are used in the rest of the simulations in
this chapter. In each section, we may modify a few of these parameters to evaluate how they
influence the network.
Note that for convenience, we have limited the size of X and Y to a small number.
Although the proposed algorithm can handle large state spaces, it makes the simulations
slow, especially when a large number of base stations are simulated on one computer.
5.1.2 Implementation Remarks
During the runtime of the algorithm, each node is updated several times. In each update,
a node should calculate its own local objective function given the current state of the local
neighborhood, and all of its own possible states from the state space. Moreover, it should
calculate the local objective function of its neighbors given their current neighborhood. Each
of these local objective functions requires a convex optimization problem of the form (4.35)
to be solved. In order to speed up the process and reduce the communication overhead,
each base station maintains a cache of the functions that it has calculated so far. So for
each state, a node tries to look up the values of the local objective functions in its cache,
and only solves the convex optimization problem if the value is not in the cache yet. In the
simulations, some functions had to be evaluated with the same input for thousands of times,
and it would have been infeasible to run the simulation for a long period without caching the
convex optimization results. This feature can vastly reduce the complexity of the protocol
in real implementations.
Another practical concern is the range of the local objective functions. Remember that
the probability distribution of each state transition is given by the Gibbs distribution, which
76

has exponential terms. In MATLAB, real numbers that cannot be represented by 1024 bits
are regarded as∞, and the maximum real number in MATLAB is 1.7977×10308. That means,
without considering the temperature variable in (4.38), the practical upper bound for the
value of local energies (sum of the local objective functions) should be ln(1.7977× 10308) ≈
707. Likewise, the lower bound of these energies is approximately −707.
This limitation is not problematic in our simulations. During the simulated annealing
procedure, when the temperature gets close enough to zero, the local energy of a node in
its best state goes to +∞. This is inevitable and necessary to converge the process to the
optimal solution. For each base station, at some point when the temperature is cool enough,
the value of local energy of one of the states reaches the upper bound of real numbers in
MATLAB. From this point on, we cannot calculate the transition probabilities, which require
exponential function computations. We assume that when the local energy of a state reaches
this limit, the base station is already converged to its optimal state and no longer needs to
be updated.
For the above assumption to be correct, we need to ensure that those near-infinity values
only happen in near-zero temperatures. Therefore we have to scale the function in a way that
for the initial temperature, the local objective value is small enough so that following Gibbs
distribution is feasible for a reasonable number of iterations. This can be easily achieved
using a linear transformation of the local objective function. For example, by multiplying
the function by a positive scalar, we can obtain the desired range of outputs. Considering
the fact that the Gibbs Sampler converges to the optimal state with the highest energy, this
scaling does not corrupt the algorithm since the same state has the maximum global energy
before and after the scaling.
77

×104
0 0.5 1 1.5 2 2.5 3
×104
0.5
1
1.5
2
2.5
(a) 1-tier neighborhood
×104
0 0.5 1 1.5 2 2.5 3
×104
0.5
1
1.5
2
2.5
(b) 2-tier neighborhood
Figure 5.2: The neighborhood graph associated with Figure 5.1.
Table 5.2: Global performance measures
Final valueTotal Throughput 866705Total energy consumption 1519.7Energy saving 153.9Global objective 56.3
5.2 States of BSs After Convergence
Figure 5.3 illustrates the state of the network after the convergence of the algorithm. For
the sake of reporting, we number the cells as follows. The macrocell in the area i of the
Figure 5.3 is referred to as Mi. The picocell that is encompassed by Mi is called Pi. Also,
the picocell that overlaps Mi and Mj is referred to as Pij.
Table 5.2 reports the final values of the performance measures after the convergence of
the system. Table 5.3 shows the breakdown of measures and state of macro-BSs. Table 5.4
reports the statistics of the pico-BSs, except for the ones that are in sleep mode after conver-
gence. Those standby pico-BSs by definition consume Pidle = 4.3W energy (see Table 5.1)
and have zero throughput.
78

×104
0 0.5 1 1.5 2 2.5 3
×104
0
0.5
1
1.5
2
2.5
3
12
3
4 5
6
7
Figure 5.3: The network after convergence. Lines indicate associations. Dotted picocells arein sleep mode.
Discussion
The energy saving in Table 5.2 comes from both macro-BSs and pico-BSs. According to
(4.24) and Table 5.1, the maximum energy consumption of a macro-BS in our model is 224
watts. Because of the low-power (or zero-power) output of macro-BSs during ABS subframes,
all of them are consuming less energy. All macro-BSs have chosen to have ABS duration
ratio of 0.3 (the largest value allowed). Macro-BS M7 is consuming less energy compared to
the other ones, because it remains fully silent during the ABS subframes, while others have
decided to transmit at quarter or half the maximum power. The reason could be the fact
that M7, as shown in the neighborhood system depicted in Figure 5.2, is interfering with
more picocell users compared to other macro-BSs.
79

Table 5.3: Statistics of macro-BSs
M1 M2 M3 M4 M5 M6 M7ABS time % 30 30 30 30 30 30 30ABS power % 25 25 50 50 50 50 0Throughput 96378.4 82924.3 139554.5 101033.4 95329.3 117013.3 52921.9Energy 202.9 202.9 209.9 209.9 209.9 209.9 195.8Objective 5.6 4.2 9.8 5.9 5.3 7.5 1.4
Table 5.4: Statistics of pico-BSs
P16 P45 P34 P23 P12 P2Throughput 24273.8 79093.2 25484.6 31992.1 13669.4 7036.9Energy 8.8 8.8 8.8 8.8 8.8 8.8Objective 2.3 7.7 2.4 3 1.2 0.5
Six of the pico-BSs are in standby mode. P1, P4 and P56 have no user in their coverage,
and there is no reason for them to stay on. P3, P5 and P6 are in sleep mode because the
users in their range can get a much better throughput from macro-BSs. Other pico-BSs are
operating because the users they are serving are either not covered by macro-BSs, or are
very close to macrocell edges.
5.3 Energy-Throughput Trade-off
There is a trade-off between throughput and energy consumption in our objective function.
This means that there are many pareto optimal solutions that are theoretically considered
equally good without a subjective preference. The trade-off between the two can be adjusted
based on different viewpoints and targets. In this section, we investigate the effect of altering
the weights of the two components of the objective function. We simulate the same network
(in Figure 5.1) with the same set of parameters. Consider the objective function in (4.27),
which is repeated here for convenience:
F (R,W) = U(R)− λ.C(W).
Table 5.5 reports the converged state of the system using different trade-off weights.
80

Energy (W)
1400 1450 1500 1550 1600 1650
Thro
ughput (b
ps)
×10 5
5
6
7
8
9 0 100 2001000
2000
5000
10000
100000
Feasible region
Infeasible region
Figure 5.4: Throughput vs. energy: Pareto frontier with different optimal solutions. Thenetwork throughput is directly proportional to the consumed energy. The maximum through-put is achieved when the energy cost is zero (λ = 0) and the lowest throughput occurs atthe highest energy cost (λ = 100000).
Figure 5.4 plots the pareto frontier corresponding to those weights.
Discussion
Table 5.5 shows the decrease in both throughput and energy as we increase the energy cost.
When we are not concerned about energy, most of the pico-BSs are on. As the cost of energy
rises, fewer pico-BSs remain operating. When λ = 104, only one pico-BS (P45) remains on,
in order to serve the two users that would have been abandoned otherwise. At λ = 105, even
that pico-BS goes to standby mode and leaves the two users unserved. Also, macro-BSs
transmit at the lowest possible power when the cost of energy is extremely high, since the
utility gain is not worth the required energy.
81

Table 5.5: Effect of the energy cost on the converged state. By increasing the weight ofenergy, throughput and energy consumption are both dropped. The last column shows thenumber of pico-BSs that are on.
λ Throughput Energy Objective Avg. xi % Avg. yi % No. Pico0 874106.3 1636.4 87.4 4.3 0 10100 870214.8 1547.9 71.5 30 50 6200 866705 1519.7 56.3 30 35.7 6500 860705 1491.5 11.5 30 21.4 61000 860705 1491.5 -63.1 30 21.4 62000 849488.6 1484.4 -211.9 30 17.9 65000 729571.6 1451.7 -652.9 30 3.6 510000 582978.2 1426.7 -1368.4 30 0 1
100000 503885 1422.2 -14171.6 30 0 0
5.4 Rate Utility Function
In this section, we study the choice of rate utility function and its effect on user throughputs.
Note that this function must be of a specific form: Local rate utility functions must add up
to the global rate utility function. This means that, for example, maximizing the minimum
rate over the global network is not possible using this method, because the global minimum
rate is not equal to the sum of the local minimum rates.
We consider two options:
1. Sum rate: U(R) = 10−4∑
u∈U Ru
2. Proportional fairness: U(R) = 10∑
u∈U log(β+Ru) where β is a positive con-
stant that plays two roles: First, it prevents an undefined logarithmic function
when Ru is zero. Secondly, it controls the fairness level. The logarithmic
function achieves fairness by punishing the utility if there are users with low
bit rates. A large β makes the function less sensitive to small Ru values and
reduces the fairness.
Note that 10 and 10−4 are placed in utility functions to scale the objective function up and
down, respectively (refer to Section 5.1.2). Since we only want to investigate the fairness
82
among users, the energy cost is not taken into account (it is investigated in the previous
section). We let the objective function be equal to the rate utility function. In other words,
in the objective function, λ = 0. The rest of the settings are the same as previous sections.
Table 5.6 shows user rate statistics for the sum function and multiple logarithmic functions.
The last column of this table reports the Jain’s fairness index, which is commonly used in
the literature and is calculated as follows:
J (r1, r2, . . . , rn) =(∑n
i=1 ri)2
n ·∑n
i=1 r2i
, (5.1)
and ranges from 1n
(worst case) to 1 (best case).
Discussion
The maximum total rate is found at the last row in Table 5.6, which represents the sum
function. The downside of this function is that it dedicates all the resources of each base sta-
tion to its nearest user, in order to maximize the throughput. This makes the sum function
impractical for real networks, since most of the users would get zero bit-rate. Figure 5.5
shows the users that are actually receiving data from their associated base stations. P16 is
serving two users, only because they are equally close to it. M3 is serving a user at a very
close distance, and the association line might not be visible.
Using a logarithmic utility function, every user receives at least a minimal bit rate in
most cases. Having a lower β leads to a higher minimum rate at the expense of lower total
throughput. Lower β also results in a lower standard deviation. Note that the minimum
rate in the last two logarithmic functions is zero, because in those situations P45 is in sleep
mode after convergence, and two users are without service.
83

×104
0 0.5 1 1.5 2 2.5 3
×104
0
0.5
1
1.5
2
2.5
312
3
4 5
6
7
Figure 5.5: Converged state of the network when using sum rate function. Each BS isdedicating all its resources to its nearest user. Since the cost of energy is considered zero,some of the idle pico-BSs remain on.
Table 5.6: Effect of rate utility function on user throughputs. Higher fairness (lower β)results in a lower aggregate throughput.
β Total rate Min rate Max rate Avg rate Std Dev Jain’s Ind1 569507.7 740 31636.9 5529.2 4285.2 0.610 569590.6 732.9 31637.6 5530 4285.8 0.6100 570425.2 662.3 31644.2 5538.1 4292.7 0.6200 586823.2 204.8 31651.6 5697.3 4382.4 0.61000 603490.2 0 31710.9 5859.1 4418.1 0.62000 607483.9 0 31784.9 5897.9 4496.7 0.6Sum(R) 866568.3 0 141054.5 8413.3 27021.5 0.1
84

5.5 Sleep Mode and ABS Subframes
In this section, we study the effect of pico-BS sleep mode and ABS subframes on the objec-
tive function. In other words, we show how much improvement we can achieve by letting
base stations have more options to choose from. To this end, we consider 4 different operating
modes for the network in Figure 5.1:
• A: In this mode, there is no ABS subframe, i.e. macro-BSs transmit at their
maximum power throughout the whole frame. Further, Pico-BSs are always
on and are not capable of entering sleep mode.
• B: This mode is similar to the above one, except macro-BSs can choose to
be silent in a fraction of a frame, chosen from X = {0, 1/10, 2/10, 3/10}. During
these subframes, macro-BSs refrain from transmitting any data signal. This
mode resembles LTE eICIC technology.
• C: In this mode, in addition to ABS subframes, macro-BSs are allowed to
transmit at a lower power level during ABS subframes. This power is a fraction
of the maximum RF output power, selected from Y = {0, 1/4, 1/2, 3/4}. This
mode resembles LTE feICIC technology.
• D: In the last mode, in addition to the previous features, pico-BSs are able to
enter sleep mode to further reduce the network energy consumption. This is
the default mode which is employed in Section 5.2.
In mode A, there is no Gibbs Sampling procedure and each base station only solves one
local convex optimization problem to allocate its subframes to its users. Results of mode
D are already explained in Section 5.2 and summarized in Tables 5.3 and 5.4. Table 5.7
reports the converged states of macro-BSs in mode B and mode C. In Table 5.8, we see the
performance comparison of the 4 modes, and the percentage of improvement over mode A.
85

Mode
A B C D
Obje
ctive
0
10
20
30
40
50
60
51.7
54.555.7 56.3
Figure 5.6: Maximum achieved global objective of each scenario.
Table 5.7: State of macro-BSs after convergence. B: macro-BSs have to be completely silentduring ABS subframes. C: Macro-BSs can transmit at a lower power during ABS subframes.
% M1 M2 M3 M4 M5 M6 M7ABS duration (B) 0 0 0 0 0 0 30ABS power (B) 0 0 0 0 0 0 0ABS duration (C) 30 30 30 30 30 30 30ABS power (C) 25 25 50 50 50 50 0
Discussion
In mode B, since macro-BSs are not allowed to transmit any data during ABS subframes,
having these subframes wastes resources and reduces the utility function. So except for
the macro-BS in the middle, which has multiple neighboring picocells, other macro-BSs
do not employ ABS subframes. In mode C, where macro-BSs have the freedom to choose
their output power during ABS subframes, they have all exploited this feature and gained
Table 5.8: Effect of ABS subframes and pico-BS sleep mode on global objective. By enablingeach feature, the objective is increased and the energy consumption is reduced.
Net Mode Throughput Energy Objective Objective Improvement (%)A 851492.5 1673.6 51.7 0B 874106.3 1645.4 54.5 5.5C 866705 1546.7 55.7 7.9D 866705 1519.7 56.3 8.9
86

performance improvement.
Figure 5.6 and Table 5.8 show that by enabling each feature, the objective is considerably
enhanced even in this small network. In this particular case, the throughput has remained
identical by letting the pico-BSs go to sleep mode. In general, the contribution of each of
the tested features on throughput and energy enhancement is dependent on the network
topology and can be influenced by the choice of the objective function.
5.6 Dense Deployment of Pico-BSs
In this section, we simulate 400 pico-BSs densely located in a 20x20 grid, with 1000 users
spread over the region using a PPP model. Figure 5.8 shows the network, and Figure 5.9
demonstrates its corresponding neighborhood system used by our algorithm. We want to
find the maximum objective that we can obtain by hibernating some of the pico-BSs. We
test 3 different scenarios:
• A: In this mode, all of the base stations are on and there is no coordination
between them. All they do is allocate resources to their users.
• B: In this mode, half of the base stations are on. We hibernate every other
pico-BS, which still keeps the whole area covered (Figure 5.10). By shutting
any other pico-BS down, some areas will be left uncovered.
• C: In this mode, we let our distributed algorithm choose which base stations
to power off in order to maximize the global objective.
Discussion
We can observe in Table 5.9 that the first scenario results in the lowest total throughput and
highest total energy consumption. In mode B, throughput is significantly improved due to
less interference on users. In the optimized scenario C, throughput is the highest, although
87

A B C
0
200
400
600
800
1000
1200
1400
1600
1800
874.8
1335.0
1625.1
Figure 5.7: Global objective of the grid of pico-BSs in 3 different states. A: All the BSs areon. B: Half of them are on. C: State of the network after convergence of Gibbs Sampler.
Table 5.9: Global objective of the grid of pico-BSs in 3 different states. A: All the BSsare on. B: Every other BS is on in each row and column. C: State of the network afterconvergence of Gibbs Sampler.
Throughput Energy No. of Operating PicosA 9627644.9 3520 400B 14005052.7 2620 200C 16933789.6 2732.5 225
the energy consumption is a bit more than mode B. Figure 5.7 shows that the optimized
scenario improves the objective function by 22% compared to mode B, and almost 85% over
mode A.
88

×104
0 0.5 1 1.5 2 2.5 3 3.5 4
×104
0
0.5
1
1.5
2
2.5
3
3.5
4
Figure 5.8: A 20x20 grid of pico-BSs with 1000 users.
×104
0.5 1 1.5 2 2.5 3 3.5 4
×104
0.5
1
1.5
2
2.5
3
3.5
4
Figure 5.9: Neighborhood graph of the network in Figure 5.8
89
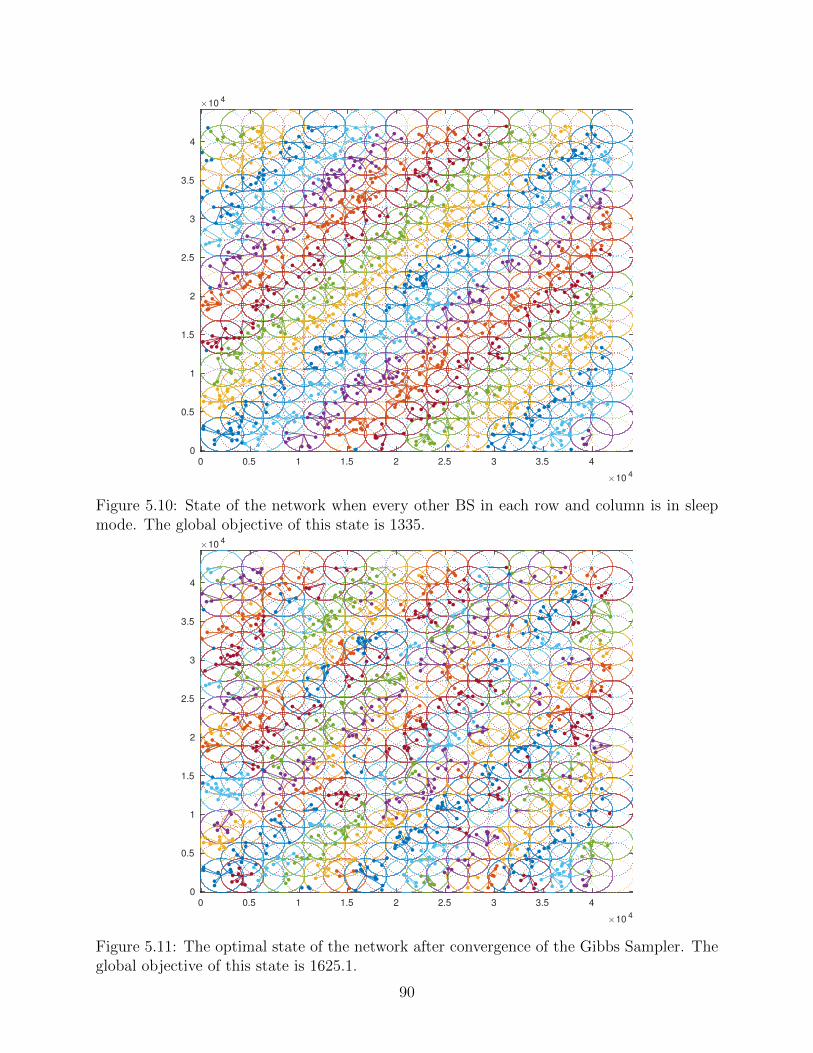
×104
0 0.5 1 1.5 2 2.5 3 3.5 4
×104
0
0.5
1
1.5
2
2.5
3
3.5
4
Figure 5.10: State of the network when every other BS in each row and column is in sleepmode. The global objective of this state is 1335.
×104
0 0.5 1 1.5 2 2.5 3 3.5 4
×104
0
0.5
1
1.5
2
2.5
3
3.5
4
Figure 5.11: The optimal state of the network after convergence of the Gibbs Sampler. Theglobal objective of this state is 1625.1.
90

5.7 Numerical Analysis of Convergence
In this section, we numerically analyze the convergence of the global objective function of
our algorithm in the network depicted in Figure 5.8.
5.7.1 Temperature Function
We evaluate 3 types of decreasing functions:
1. Logarithmic function: T (t) = T02 log(2+t)
2. Linear function: T (t) = T0(1 + t−11−tend
)
3. Quadratic function: T (t) = T0(1 + t−11−tend
)2
In the above functions, the initial temperature is set to T0 = 5. The latter two reach
zero at t = tend = 104. The iterations between two successive updates for each base station
is randomly chosen from [1, τ ] after each step, where τ = 10. Table 5.10 compares the
performance of the three mentioned functions.
Note that in order to find the global objective at any arbitrary state of the network,
each local objective function has to be evaluated once per each local neighborhood state.
For example, if a macro-BS has m adjacent macro-BSs and n adjacent pico-BSs, its local
objective function can take 2n|X × Y|m+1 different values. Given the size of state spaces of
macro-BSs and pico-BSs, and the neighborhood systems of the two networks studied in this
chapter (Figure 5.2a and Figure 5.9), the total number of local objective function evaluations
(i.e., total number of convex optimization problems) for the two networks is 123, 025 and
168, 572, respectively. However, the Gibbs Sampler may not visit all the possible states of
the networks, and therefore not all of the local objective functions have to be evaluated for
every state in their neighborhood. Table 5.10 shows how many of the convex optimization
problems were actually needed in each simulation.
91

Iteration (t)
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
500
1000
1500
2000
0
0.5
1
1.5
2
Global Objective
Temperature
Figure 5.12: Convergence of logarithmic temperature function
Iteration (t)
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
2000
0
5
Global Objective
Temperature
Figure 5.13: Convergence of linear temperature function
Table 5.10: Effect of the temperature function on convergence of the system. The logarithmicfunction only evaluates 8.3% of the local objectives and quickly finds high-energy states. Atthe end, linear and quadratic functions find better solutions.
Temperature Function Objective No. Solved % Solved Avg. No. UpdatesLogarithmic 1595.7 14018 8.3 1818.7Linear 1603.2 163468 97 1818.9Quadratic 1625.1 157873 93.7 1818.7
92
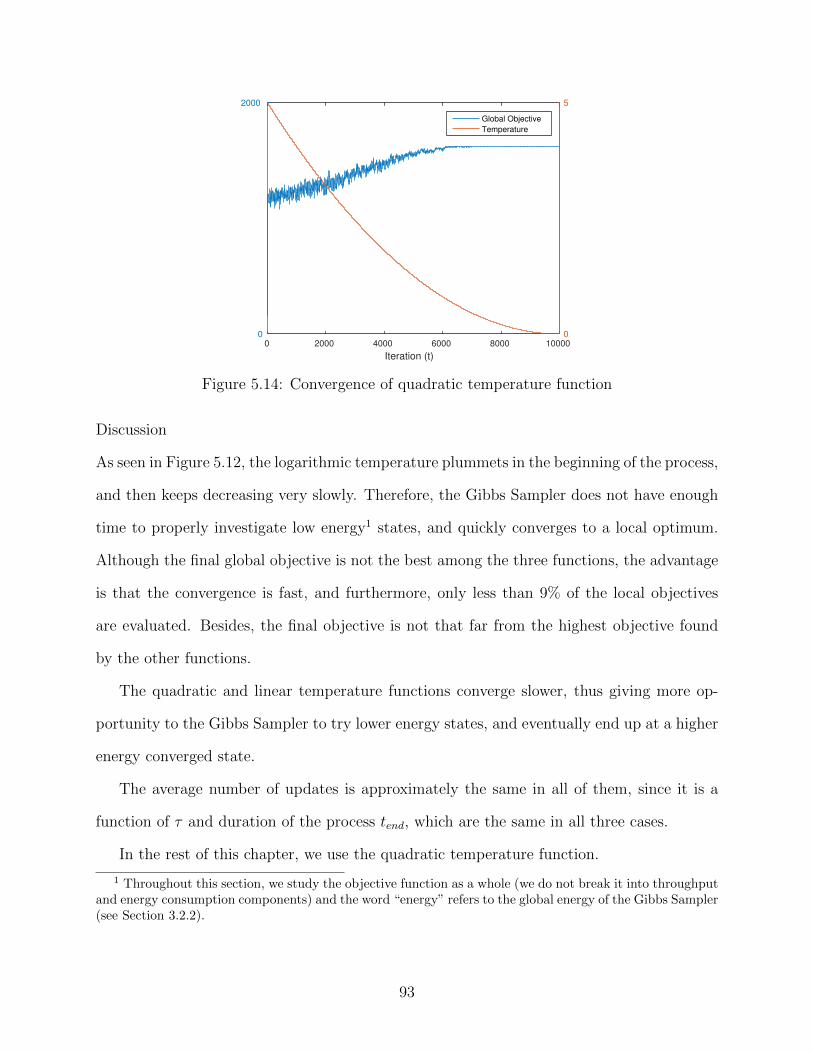
Iteration (t)
0 2000 4000 6000 8000 100000
2000
0
5
Global Objective
Temperature
Figure 5.14: Convergence of quadratic temperature function
Discussion
As seen in Figure 5.12, the logarithmic temperature plummets in the beginning of the process,
and then keeps decreasing very slowly. Therefore, the Gibbs Sampler does not have enough
time to properly investigate low energy1 states, and quickly converges to a local optimum.
Although the final global objective is not the best among the three functions, the advantage
is that the convergence is fast, and furthermore, only less than 9% of the local objectives
are evaluated. Besides, the final objective is not that far from the highest objective found
by the other functions.
The quadratic and linear temperature functions converge slower, thus giving more op-
portunity to the Gibbs Sampler to try lower energy states, and eventually end up at a higher
energy converged state.
The average number of updates is approximately the same in all of them, since it is a
function of τ and duration of the process tend, which are the same in all three cases.
In the rest of this chapter, we use the quadratic temperature function.
1 Throughout this section, we study the objective function as a whole (we do not break it into throughputand energy consumption components) and the word “energy” refers to the global energy of the Gibbs Sampler(see Section 3.2.2).
93

Table 5.11: Effect of update rate on convergence of the system. The number of iterationsbetween each two consecutive updates is randomly chosen from [1, τ ]. The table show thateven with the smallest average number of updates (198), a good objective value (1604.1) isfound at the end.
τ Objective No. Solved % Solved Avg. No. Updates100 1604.1 88153 52.3 19850 1601.4 114987 68.2 391.120 1609.5 144299 85.6 952.110 1625.1 157873 93.7 1818.75 1613.6 163925 97.2 3334.11 1622.7 167838 99.6 10000
5.7.2 Update Rate
In this section we investigate the effect of update rate of base station states on the final
global objective. The number of iterations in each simulation is 104. Remember that how
frequently a BS is updated depends on the parameter τ . A higher value of τ results in fewer
updates.
Discussion
Table 5.11 implies that having more updates does not always guarantee higher global objec-
tive values. In the last row, each BS is updated at each iteration, and 99.6% of the possible
states of the network have been evaluated, yet the final global objective is less than the one
with τ = 10. In the first row, on the other hand, only half of the states are investigated,
and with average of 198 updates per BS, a reasonably good global objective is found. In
general, this parameter should be tuned in conjunction with the duration parameter tend,
since together they determine the number of updates of each BS.
5.7.3 Initial Temperature
This section studies how the initial temperature affects the converged global objective. We
use the quadratic function with tend = 104 and τ = 10.
94

Table 5.12: Effect of the initial temperature on convergence of the system. Starting fromhigher temperatures does not necessarily lead to higher final objective values, although itmakes the algorithm consider more possibilities.
T0 Objective No. Solved % Solved Avg. No. Updates1 1611.3 31602 18.7 1818.33 1606.7 132436 78.6 1818.45 1625.1 157873 93.7 1818.710 1610.3 166687 98.9 1818.1100 1618.8 168484 99.9 1818.6
Table 5.13: Effect of the duration of the Gibbs Sampling process on the final global objectivein grid of pico-BSs. Longer runtimes lead to better solutions.
tend Objective No. Solved % Solved Avg. No. Updates100 1555.4 23217 13.8 18500 1603.9 61235 36.3 90.81000 1607.7 88250 52.4 182.15000 1615.1 144511 85.7 909.410000 1625.1 157873 93.7 1818.7
Discussion
Table 5.12 suggests that starting from a very high temperature does not necessarily improve
the final value. It may even cause the Gibbs Sampler to waste its time searching for states
that are unlikely to be optimal, and have less time to try states with a higher potential to be
the global maximum. A fairly good global objective is found with T0 = 1, with only solving
18.7% of the convex optimizations across the network.
5.7.4 Duration
Finally, we investigate the effect of the number of iterations of the algorithm (tend) on the
final global objective. We use quadratic functions that start at T0 = 5 and reach zero at
different tend values.
Discussion
Table 5.13 shows that by increasing the length of the process, we get improved results, which
is intuitively true. It should be noted that even though the best global objective is found
95

Number of iterations
10 2 10 3 10 4
Fin
al g
lob
al o
bje
ctive
1550
1560
1570
1580
1590
1600
1610
1620
1630
Figure 5.15: Semi-log plot of effect of duration of the algorithm on the final global objective.
Table 5.14: Effect of duration of Gibbs Sampling on the final global objective in the HetNetof Figure 5.1. Because the network is small, a few number of updates is enough to reach theoptimal solution.
tend Objective No. Solved % Solved Avg. No. Updates50 55.9 1622 1.3 8.2100 56.3 2597 2.1 17.31000 56.3 12229 9.9 180.1
96
with 10000 iterations, using one tenth of this number we can still get a good global objective
which is only 1.1% less than the highest value. The semi-log plot of the objective values in
Table 5.13 is presented in Figure 5.15.
From the tables and plots in this section, we conclude that there is a trade-off between
the speed of convergence and the quality of the final global objective. In general, the more
updates per BS, which can be achieved by a larger tend or a smaller τ , results in a better
converged state.
Additionally, choosing the right parameters for the temperature function depends on the
topology of the network. In Table 5.14, we see the effect of the duration of the algorithm on
the final global objective in the network of Section 5.2. Since the neighborhood graph of this
network (Figure 5.2a) is much smaller than that of the pico-BS grid scenario (Figure 5.9),
the effect of each BS update propagates throughout the network faster, and fewer updates
are needed to find the optimal state. Table 5.14 shows that by solving only 2.1% of the
123025 convex optimization problems, the best state has been found.
97

Chapter 6
Conclusion
In this work, we developed a distributed algorithm to balance the trade-off between energy
consumption and throughput of heterogeneous cellular networks. Our algorithm achieves
this by putting underutilized pico base stations in standby mode and adjusting the ratio of
almost blank subframes in individual macro base stations, in order to minimize the inter-
ference on pico-BS users. In addition to the ratio of ABS subframes, our algorithm allows
macro-BSs to serve their users at a lower output power, which is assigned to individual
macro-BSs in an optimal fashion that maximizes the aggregate network utility. An impor-
tant feature of the proposed algorithm is its distributed manner, which is achieved by using
Gibbs Sampling. To the best of our knowledge, this is the first method proposed to power off
pico-BSs and adjust output power of ABS subframes in a decentralized way. The simulation
results show that our algorithm has reduced the energy consumption by more than 9% in
the HetNet described in Section 5.1. Moreover, the global objective is increased by 22% in
the picocell grid depicted in Figure 5.8.
6.1 Thesis Summary
In Chapter 1, we explained the problem and presented the goal of the research. We men-
tioned the rapid growth of cellular networks, and pointed out two unavoidable consequences
of this expansion. One is the energy concern that emerges as a result of more cells in Het-
Nets, which is a crucial consideration in deploying pico-BSs. The other is the importance of
self-optimization of network parameters and minimizing manual network configuration man-
agement. Also, we emphasized the tendency of network operators to simplify the structure
of modern cellular networks, and expressed our motivation towards designing a distributed
98

algorithm that is run by base stations without requiring a separate coordinator entity.
Then, in Chapter 2, we reviewed the methods of associating mobile users to cellular
base stations. We explained the static RSRP-based method, as well as load-aware schemes.
Range expansion was mentioned as the mechanism provided by LTE networks to perform
load-balancing and offload macrocell users to picocells. Chapter 2 also elaborated different
types of interference. This includes the interference on cell-edge users, the interference
imposed by macro-BSs to small cells, and the interference imposed by femto-BSs on macrocell
users that are not registered in the closed subscription group of femtocells. Then the inter-
cell interference coordination schemes were reviewed. Frequency domain separation is one
such method, although not typically used in LTE networks where frequency reuse factor is
1. Also, time domain and power allocation schemes were discussed, and ABS subframes
of eICIC and low-power ABS subframes of feICIC were explained as examples of them. A
review of different types of self-organization in cellular networks is provided in Chapter 2,
and the difference between centralized and distributed approaches is scrutinized.
Chapter 3 contains theoretical aspects of the optimization techniques in our work. We
briefly discussed convex optimization problems, which are used in our meta-optimization
to solve the local resource allocation in each cell. Then we named some common discrete
optimization techniques, and laid out their shortcomings for our problem. Gibbs Sampling
was described after reviewing some basic definitions, and justified as a suitable optimization
method for our problem. At the end of the chapter, using an example, we demonstrated how
Gibbs Sampling can be utilized to solve a network-wide optimization problem, where each
node has a local objective, and the network can be represented as a Markov random field.
In Chapter 4, we reiterated our design goals, and specified the assumptions made in our
design. Then we defined a neighborhood system on the graph of base stations in the network,
in a way that they constitute a Markov random field. We formulated a rate utility function
to be maximized, an energy cost function to be minimized, and a global objective function
99

to balance the two conflicting goals. We then presented our iterative method, which requires
limited information exchange between neighboring BSs and drives the system to the optimal
state.
Finally, we simulated the algorithm and examined the performance of the proposed
method in Chapter 5 and evaluated the effect of each parameter. Numerical studies showed
that the algorithm can very quickly converge to near-optimal states, and find the optimal
solution in a reasonable amount of time. We demonstrated how network operators are able
to balance the throughput-energy trade-off in our method by tuning the objective function.
The level of fairness is also showed to be tunable by tweaking the rate utility function.
Then we showed that considerable energy saving is achievable by turning off some pico-BSs
without losing much throughput.
We simulated two network topologies, one HetNet comprising 7 macro-BSs and 12 pico-
BSs, and one grid of pico-BSs. In a real scenario, due to the distributed manner of the
proposed method, each BS separately solves its own convex optimizations, so the computa-
tional complexity of the global algorithm is not directly a function of number of BSs. In the
simulations, all the computations are performed on one PC with limited resources. Consid-
ering the fact that analyzing each parameter requires many simulations, we had limitations
on the size of the networks under study. Nevertheless, we observed promising outcomes even
in the small-scale HetNet scenario.
6.2 Future Work
Several lines of research can be pursued by expanding the ideas of this thesis. In the following,
we suggest some of the interesting areas for future investigation:
• Load balancing: In our proposed method, mobile users associate with the base station
with the maximum reference signal received power. For future studies, we can incorporate
user association to perform load balancing using the range expansion concept. This can
100

be achieved using the same Gibbs Sampling technique, by adding cell selection bias to
state space of base stations. This way, instead of having only 2 states (on / off), pico-BSs
can have multiple states each of which indicates a specific coverage range.
• Multiple frequency channels: The algorithm can be further extended by supporting
multiple frequency channels. Then for each macro-BS, we can maintain a set of states for
ABS duration and ABS power ratios per channel. Subframes would also be allocated to
users separately on each channel. This makes it more likely for users with high interference
on one channel to be served interference-free on another channel.
• Integer number of subframes: Another enhancement can take place in the locally
solved resource allocation stage of the algorithm. Right now we allocate a real fraction of
the subframes to each user, and this makes it possible for each base station to optimally
allocate subframes to its users by solving a convex optimization problem. However, in
cellular networks, the number of subframes of a frame is predefined, and they cannot
be partially assigned to users. This makes the assignment problem an integer linear
problem that cannot be solved by convex solvers. This thesis has been concentrated on
the distributed part of the optimization. Moreover, the assumption of real-valued fraction
of subframes has been exploited in the literature. Nonetheless, this can be achieved as a
future work, for example by linear programming relaxation.
• Fast-changing environments: An intriguing future research would be to investigate
the performance of Gibbs Sampling in rapidly-changing environments. Our algorithm
assumes that the arrival and departure rates of users are slow and the users stay relatively
stationary during the short convergence period. It would be interesting to study the
extent to which user movements can affect the performance of Gibbs Sampling. Next, we
can relax the mentioned assumption by adapting the Gibbs Sampler to a dynamic user
population.
101
Bibliography
[1] Femtocell and microcells. Available online at https://www.repeaterstore.com/
pages/femtocell-and-microcell.
[2] Path loss. Available online at https://en.wikipedia.org/wiki/Path_loss.
[3] Saddle point. Available online at https://en.wikipedia.org/wiki/Saddle_point.
[4] Simulated annealing. Available online at https://en.wikipedia.org/wiki/
Simulated_annealing.
[5] Heterogeneous networks - securing excellent mobile broadband user experience, every-
where. Technical report, Ericsson, 2014.
[6] Ericsson mobility report: On the pulse of the networked society. Technical report,
Ericsson, 2015.
[7] 3GPP. Evolved Universal Terrestrial Radio Access (E-UTRA) and Evolved Universal
Terrestrial Radio Access Network (E-UTRAN); Overall description; Stage 2. TS 36.300,
3rd Generation Partnership Project (3GPP), 03 2011.
[8] 3GPP. Evolved Universal Terrestrial Radio Access (E-UTRA); Mobility enhancements
in heterogeneous networks. TR 36.839, 3rd Generation Partnership Project (3GPP), 06
2011.
[9] 3GPP. UTRAN Iub interface Node B Application Part (NBAP) signalling. TS 25.433,
3rd Generation Partnership Project (3GPP), 06 2011.
[10] 3GPP. LTE; E-UTRAN; X2 Application Protocol (Release 12). Technical Report
36.423, 3rd Generation Partnership Project (3GPP), 2015.
102

[11] Ali Abbasi and Majid Ghaderi. Online algorithms for energy cost minimization in
cellular networks. In Proceedings of IEEE 22nd International Symposium of Quality of
Service (IWQoS), pages 302–307. IEEE, 2014.
[12] Imran Ashraf, Federico Boccardi, and Lester Ho. Sleep mode techniques for small cell
deployments. IEEE Communications Magazine, 49(8):72–79, 2011.
[13] Wei Bao and Ben Liang. Structured spectrum allocation and user association in hetero-
geneous cellular networks. In Proceedings of IEEE INFOCOM, pages 1069–1077. IEEE,
2014.
[14] Murat Bilgic. Who needs lte small cells first? Technical report, EXFO, 2013.
[15] Sem C Borst, Mihalis G Markakis, and Iraj Saniee. Nonconcave utility maximiza-
tion in locally coupled systems, with applications to wireless and wireline networks.
IEEE/ACM Transactions on Networking, 22(2):674–687, 2014.
[16] Claudio Bottai, Claudio Cicconetti, Arianna Morelli, Michele Rosellini, and Christian
Vitale. Energy-efficient user association in extremely dense small cells. In Proceedings
of the European Conference on Networks and Communications (EuCNC14), 2014.
[17] Stephen Boyd and Lieven Vandenberghe. Convex optimization. Cambridge university
press, 2004.
[18] Pierre Bremaud. Markov chains: Gibbs fields, Monte Carlo simulation, and queues,
volume 31. Springer Science & Business Media, 2013.
[19] Chung Shue Chen and Francois Baccelli. Self-optimization in mobile cellular networks:
Power control and user association. In Proceedings of IEEE International Conference
on Communications (ICC), pages 1–6. IEEE, 2010.
103

[20] Xiaohui Chen, Wenqing Cheng, Wei Yuan, Wei Liu, and Jing Xu. Joint optimization of
channel allocation and ap association in variable channel-width wlans. In Proceedings of
IEEE Wireless Communications and Networking Conference (WCNC), pages 345–350.
IEEE, 2013.
[21] Michal Cierny, Haining Wang, Risto Wichman, Zhi Ding, and Carl Wijting. On number
of almost blank subframes in heterogeneous cellular networks. IEEE Transactions on
Wireless Communications, 12(10):5061–5073, 2013.
[22] Cisco Visual Networking Index Cisco. Global mobile data traffic forecast update, 2014–
2019. white paper, 2015.
[23] Steven Corroy, Laetitia Falconetti, and Rudolf Mathar. Cell association in small het-
erogeneous networks: Downlink sum rate and min rate maximization. In Proceedings of
IEEE Wireless Communications and Networking Conference (WCNC), pages 888–892.
IEEE, 2012.
[24] Pierre Coucheney, Corinne Touati, and Bruno Gaujal. Fair and efficient user-network
association algorithm for multi-technology wireless networks. In Proceedings of IEEE
INFOCOM, pages 2811–2815. IEEE, 2009.
[25] Frederico RB Cruz, Geraldo Robson Mateus, and J MacGregor Smith. A branch-
and-bound algorithm to solve a multi-level network optimization problem. Journal of
Mathematical Modelling and Algorithms, 2(1):37–56, 2003.
[26] Sajal K Das and Sanjoy K Sen. A new location update strategy for cellular networks
and its implementation using a genetic algorithm. In Proceedings of the 3rd annual
ACM/IEEE international conference on Mobile computing and networking, pages 185–
194. ACM, 1997.
[27] Suman Das, Harish Viswanathan, and Gee Rittenhouse. Dynamic load balancing
104

through coordinated scheduling in packet data systems. In Proceedings of IEEE IN-
FOCOM, volume 1, pages 786–796. IEEE, 2003.
[28] Antonio De Domenico, Valentin Savin, and Dimitri Ktenas. A backhaul-aware cell selec-
tion algorithm for heterogeneous cellular networks. In Proceedings of IEEE 24th Inter-
national Symposium on Personal Indoor and Mobile Radio Communications (PIMRC),
pages 1688–1693. IEEE, 2013.
[29] Supratim Deb, Pantelis Monogioudis, Jerzy Miernik, and James P Seymour. Algorithms
for enhanced inter-cell interference coordination (eicic) in lte hetnets. IEEE/ACM
Transactions on Networking (TON), 22(1):137–150, 2014.
[30] Bjorn Debaillie, Alexandre Giry, Manuel J Gonzalez, Laurent Dussopt, Min Li, Dieter
Ferling, and Vito Giannini. Opportunities for energy savings in pico/femto-cell base-
stations. In Future Network & Mobile Summit (FutureNetw), pages 1–8. IEEE, 2011.
[31] Gianni A Di Caro, Frederick Ducatelle, and Luca M Gambardella. Ant colony optimiza-
tion for routing in mobile ad hoc networks in urban environments. Technical report,
Dalle Molle Institute for Artificial Intelligence, Manno, Switzerland, 2008.
[32] Russell C Eberhart and Yuhui Shi. Particle swarm optimization: developments, applica-
tions and resources. In Proceedings of the 2001 Congress on Evolutionary Computation,
volume 1, pages 81–86. IEEE, 2001.
[33] Ahmed Elwhishi, Issmail Ellabib, and Idris El-Feghi. Ant colony optimization for loca-
tion area planning in cellular networks.
[34] Juan Espino and Jan Markendahl. Analysis of macro–femtocell interference and impli-
cations for spectrum allocation. In Proceedings of IEEE 20th International Symposium
on Indoor and Mobile Radio Communications, pages 2208–2212. IEEE, 2009.
105

[35] Konstantinos P Ferentinos and Theodore A Tsiligiridis. Adaptive design optimization
of wireless sensor networks using genetic algorithms. Computer Networks, 51(4):1031–
1051, 2007.
[36] Dariush Fooladivanda and Catherine Rosenberg. Joint resource allocation and user
association for heterogeneous wireless cellular networks. IEEE Transactions on Wireless
Communications, 12(1):248–257, 2013.
[37] Joseph RL Fournier and Samuel Pierre. Assigning cells to switches in mobile networks
using an ant colony optimization heuristic. Computer communications, 28(1):65–73,
2005.
[38] Fabio Garzia, Cristina Perna, Roberto Cusani, et al. Optimization of umts network
planning using genetic algorithms. Communications and Network, 2(03):193, 2010.
[39] Jagadish Ghimire and Catherine Rosenberg. Resource allocation, transmission coordi-
nation and user association in heterogeneous networks: a flow-based unified approach.
IEEE Transactions on Wireless Communications, 12(3):1340–1351, 2013.
[40] Fred Glover. Tabu search: A tutorial. Interfaces, 20(4):74–94, 1990.
[41] Paulo RL Gondim. Genetic algorithms and the location area partitioning problem in
cellular networks. In Proceedings of IEEE Vehicular Technology Conference, Mobile
Technology for the Human Race, volume 3, pages 1835–1838. IEEE, 1996.
[42] Didem Gozupek, Gaye Genc, and Cem Ersoy. Channel assignment problem in cellu-
lar networks: A reactive tabu search approach. In Proceedings of 24th International
Symposium on Computer and Information Sciences (ISCIS), pages 298–303, 2009.
[43] Vu Nguyen Ha and Long Bao Le. Distributed base station association and power con-
trol for heterogeneous cellular networks. IEEE Transactions on Vehicular Technology,
63(1):282–296, 2014.
106

[44] Jin-Kao Hao, Raphael Dorne, and Philippe Galinier. Tabu search for frequency assign-
ment in mobile radio networks. Journal of heuristics, 4(1):47–62, 1998.
[45] Ekram Hossain, Mehdi Rasti, Hina Tabassum, and Amr Abdelnasser. Evolution toward
5g multi-tier cellular wireless networks: An interference management perspective. IEEE
Wireless Communications, 21(3):118–127, 2014.
[46] MA Imran, E Katranaras, G Auer, O Blume, V Giannini, I Godor, Y Jading, M Olsson,
D Sabella, P Skillermark, et al. Energy efficiency analysis of the reference systems, areas
of improvements and target breakdown. Technical report, Tech. Rep. ICT-EARTH
deliverable, 2011.
[47] Jie Jia, Jian Chen, Guiran Chang, and Zhenhua Tan. Energy efficient coverage control
in wireless sensor networks based on multi-objective genetic algorithm. Computers &
Mathematics with Applications, 57(11):1756–1766, 2009.
[48] Satya Krishna Joshi, Pradeep Chathuranga Weeraddana, Marian Codreanu, and Matti
Latva-Aho. Weighted sum-rate maximization for miso downlink cellular networks via
branch and bound. IEEE Transactions on Signal Processing, 60(4):2090–2095, 2012.
[49] Hany Kamal, Marceau Coupechoux, and Philippe Godlewski. A tabu search dsa al-
gorithm for reward maximization in cellular networks. In Proceedings of IEEE 6th
International Conference on Wireless and Mobile Computing, Networking and Commu-
nications (WiMob), pages 40–45. IEEE, 2010.
[50] Irene Katzela and Mahmoud Naghshineh. Channel assignment schemes for cellular
mobile telecommunication systems: A comprehensive survey. IEEE Personal Commu-
nications, 3(3):10–31, 1996.
[51] Bruno Kauffmann, Francois Baccelli, Augustin Chaintreau, Vivek Mhatre, Konstantina
Papagiannaki, and Christophe Diot. Measurement-based self organization of interfering
107

802.11 wireless access networks. In Proceedings of IEEE INFOCOM, pages 1451–1459.
IEEE, 2007.
[52] Turkan Ahmed Khaleel and Manar Younis Ahmed. Using intelligent water drops al-
gorithm for optimisation routing protocol in mobile ad–hoc networks. International
Journal of Reasoning-based Intelligent Systems, 4(4):227–234, 2012.
[53] Aamod Khandekar, Naga Bhushan, Ji Tingfang, and Vieri Vanghi. Lte-advanced: Het-
erogeneous networks. In Proceedings of European Wireless Conference (EW), pages
978–982. IEEE, 2010.
[54] Raghavendra V Kulkarni and Ganesh Kumar Venayagamoorthy. Particle swarm opti-
mization in wireless-sensor networks: A brief survey. IEEE Transactions on Systems,
Man, and Cybernetics, Part C: Applications and Reviews, 41(2):262–267, 2011.
[55] NM Latiff, Charalampos C Tsimenidis, and Bayan S Sharif. Energy-aware clustering
for wireless sensor networks using particle swarm optimization. In Proceedings of IEEE
18th International Symposium on Personal, Indoor and Mobile Radio Communications,
PIMRC, pages 1–5. IEEE, 2007.
[56] Xiaohang Li, Xiaojun Tang, Chih-Chun Wang, and Xiaojun Lin. Gibbs-sampling-based
optimization for the deployment of small cells in 3g heterogeneous networks. In Pro-
ceedings of IEEE 11th International Symposium on Modeling & Optimization in Mobile,
Ad Hoc & Wireless Networks (WiOpt), pages 444–451. IEEE, 2013.
[57] Ritesh Madan, Jaber Borran, Ashwin Sampath, Naga Bhushan, Aamod Khandekar,
and Tingfang Ji. Cell association and interference coordination in heterogeneous lte-a
cellular networks. IEEE Journal on Selected Areas in Communications, 28(9):1479–
1489, 2010.
108

[58] Chiu Y Ngo and Victor OK Li. Fixed channel assignment in cellular radio net-
works using a modified genetic algorithm. IEEE Transactions on Vehicular Technology,
47(1):163–172, 1998.
[59] LEI NIU and MUHAMMAD SALMAN. Resource allocation and power control for
device-to-device (d2d) communication. Master’s thesis, CHALMERS UNIVERSITY
OF TECHNOLOGY, Gteborg, Sweden, 2013.
[60] Nasr Obaid and Andreas Czylwik. Energy efficiency analysis of dense picocell deploy-
ments. In Proceedings of 18th International OFDM Workshop (InOWo’14), pages 1–6.
VDE, 2014.
[61] Jinyoung Oh and Youngnam Han. Cell selection for range expansion with almost blank
subframe in heterogeneous networks. In Proceedings of IEEE 23rd International Sympo-
sium on Personal Indoor and Mobile Radio Communications (PIMRC), pages 653–657.
IEEE, 2012.
[62] Olav Østerbø and Ole Grøndalen. Benefits of self-organizing networks (son) for mobile
operators. Journal of Computer Networks and Communications, 2012, 2012.
[63] Samuel Pierre and Fabien HoueTo. A tabu search approach for assigning cells to switches
in cellular mobile networks. Computer Communications, 25(5):464–477, 2002.
[64] Athul Prasad, Andreas Maeder, and Chenghock Ng. Energy efficient small cell activa-
tion mechanism for heterogeneous networks. In Proceedings of IEEE Globecom Work-
shops (GC Wkshps), pages 754–759. IEEE, 2013.
[65] Alejandro Quintero and Samuel Pierre. On the design of large-scale cellular mobile
networks using multi-population memetic algorithms. In Engineering Evolutionary In-
telligent Systems, pages 353–377. Springer, 2008.
109

[66] Aimin Sang, Xiaodong Wang, Mohammad Madihian, and Richard D Gitlin. Coor-
dinated load balancing, handoff/cell-site selection, and scheduling in multi-cell packet
data systems. Wireless Networks, 14(1):103–120, 2008.
[67] Sunil Srinivasa and Martin Haenggi. Path loss exponent estimation in large wireless
networks. In Information Theory and Applications Workshop, pages 124–129. IEEE,
2009.
[68] David J Strauss. Hammersley–clifford theorem. Encyclopedia of Statistical Sciences,
1983.
[69] Rahul Urgaonkar. Optimal resource allocation and cross-layer control in cognitive and
cooperative wireless networks. University of Southern California, 2011.
[70] Rui Wang and Yinggang Du. Het-net throughput analysis with picocell interference
cancellation. In Proceedings of IEEE International Conference on Communications
Workshops (ICC), pages 1–6. IEEE, 2011.
[71] Zhang Yangyang, J Chunlin, Yuan Ping, LI Manlin, Wang Chaojin, Wang Guangxing,
et al. Particle swarm optimization for base station placement in mobile communication.
In Proceedings of IEEE International Conference on Networking, Sensing and Control,
volume 1, pages 428–432. IEEE, 2004.
[72] Qiaoyang Ye, Mazin Al-Shalashy, Constantine Caramanis, and Jeffrey G Andrews.
On/off macrocells and load balancing in heterogeneous cellular networks. In Proceedings
of IEEE Global Communications Conference (GLOBECOM), pages 3814–3819. IEEE,
2013.
110