unmanned aircraft systems (uas) integration in the ... · unmanned aircraft systems (uas)...
TRANSCRIPT
Unmanned Aircraft Systems (UAS) Integration in the National Airspace
System (NAS) Project Briefing to
Chuck Johnson
Senior Advisor for UAS Integration
UAS INTEGRATION IN THE NASSeptember 12, 2017 1
https://ntrs.nasa.gov/search.jsp?R=20170009592 2019-05-12T14:39:45+00:00Z
• NASA Organization
• NASA Cohesive UAS Integration Strategy
– Scope / Outcome
– Current Landscape and Future Vision
– Overarching UAS Community Strategy
• UAS Integration in the NAS Project Overview
– Project Goal
– Detect and Avoid
– Command and Control
– System Integration and Operationalization Demonstration
Discussion Topics
2
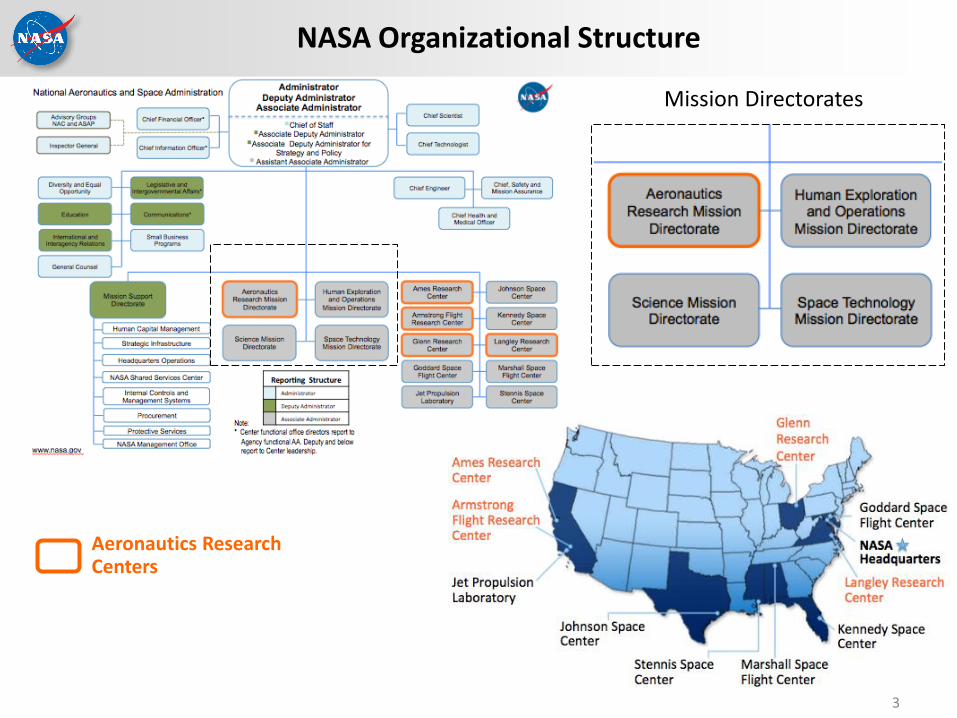
Aeronautics Research Centers
3
NASA Organizational Structure
Mission Directorates
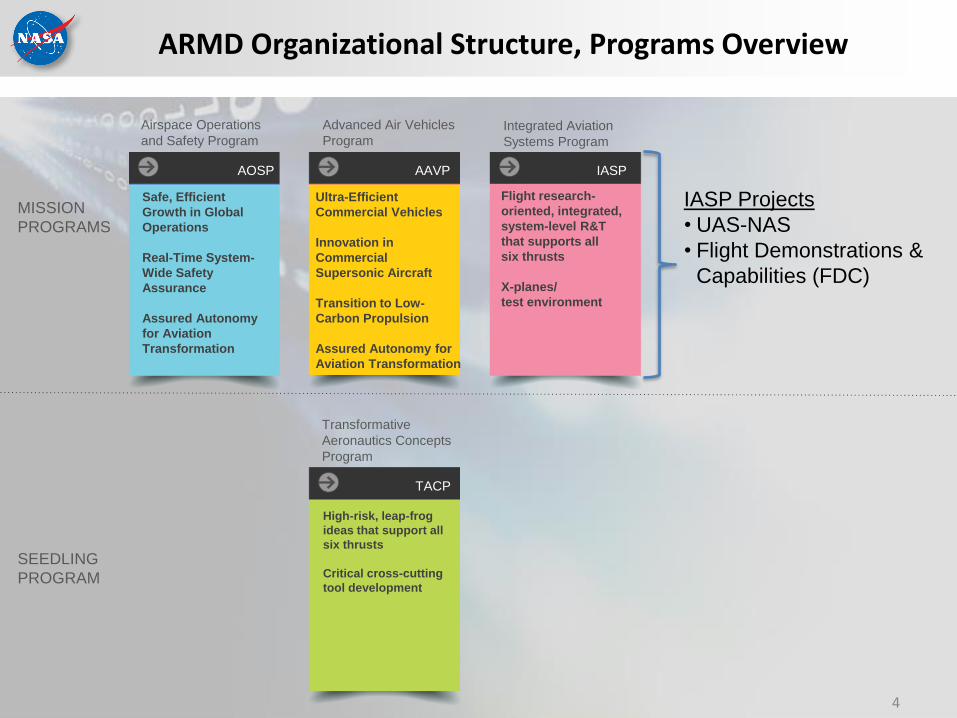
Airspace Operations
and Safety Program
Advanced Air Vehicles
ProgramIntegrated Aviation
Systems Program
Transformative
Aeronautics Concepts
Program
AOSP AAVP IASP
TACP
Safe, Efficient
Growth in Global
Operations
Real-Time System-
Wide Safety
Assurance
Assured Autonomy
for Aviation
Transformation
Ultra-Efficient
Commercial Vehicles
Innovation in
Commercial
Supersonic Aircraft
Transition to Low-
Carbon Propulsion
Assured Autonomy for
Aviation Transformation
Flight research-
oriented, integrated,
system-level R&T
that supports all
six thrusts
X-planes/
test environment
High-risk, leap-frog
ideas that support all
six thrusts
Critical cross-cutting
tool development
MISSION
PROGRAMS
SEEDLING
PROGRAM
4
ARMD Organizational Structure, Programs Overview
IASP Projects
• UAS-NAS
• Flight Demonstrations &
Capabilities (FDC)

NASA Cohesive UAS Integration Strategy
5

Full UAS Integration Vision of the Future
Manned and unmanned aircraft will be able to routinely operate through all phases of flight in the NAS, based on airspace requirements and system
performance capabilities
6
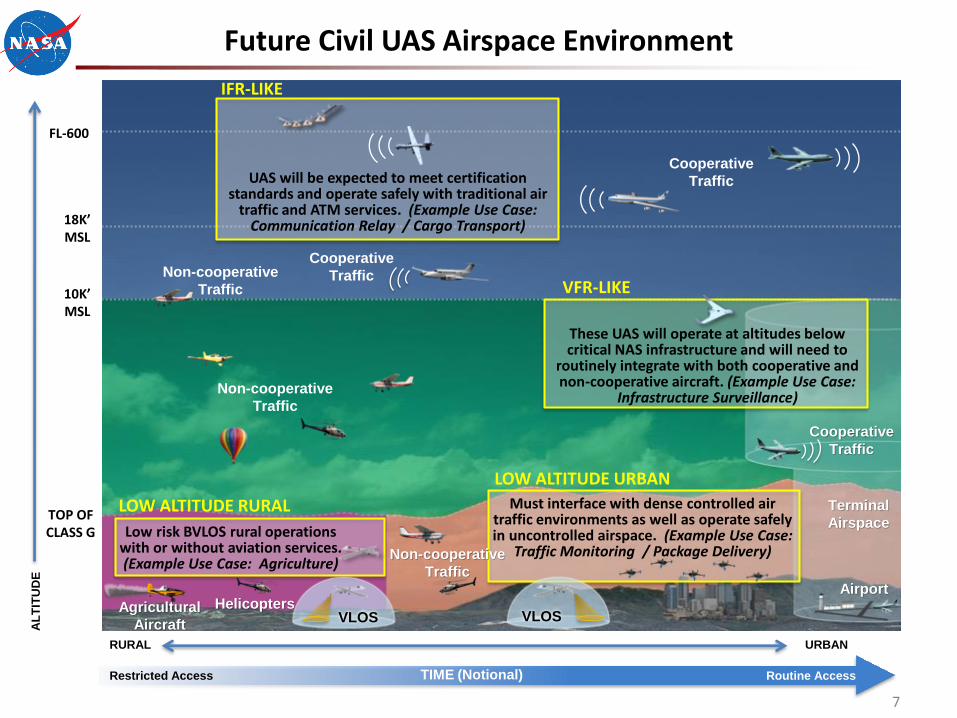
Future Civil UAS Airspace Environment
FL-600
18K’ MSL
10K’ MSL
Airport
Terminal
Airspace
AL
TIT
UD
E
Cooperative
Traffic
Non-cooperative
Traffic
These UAS will operate at altitudes below critical NAS infrastructure and will need to
routinely integrate with both cooperative and non-cooperative aircraft. (Example Use Case:
Infrastructure Surveillance)
VFR-LIKE
Non-cooperative
Traffic
Cooperative
Traffic
Must interface with dense controlled air traffic environments as well as operate safely in uncontrolled airspace. (Example Use Case:
Traffic Monitoring / Package Delivery)
LOW ALTITUDE URBAN
UAS will be expected to meet certification standards and operate safely with traditional air
traffic and ATM services. (Example Use Case: Communication Relay / Cargo Transport)
IFR-LIKE
Non-cooperative
Traffic
Agricultural
Aircraft
TOP OF CLASS G
TIME (Notional)Restricted Access Routine Access
Helicopters
Low risk BVLOS rural operations with or without aviation services. (Example Use Case: Agriculture)
LOW ALTITUDE RURAL
Cooperative
Traffic
RURAL URBAN
VLOSVLOS
7
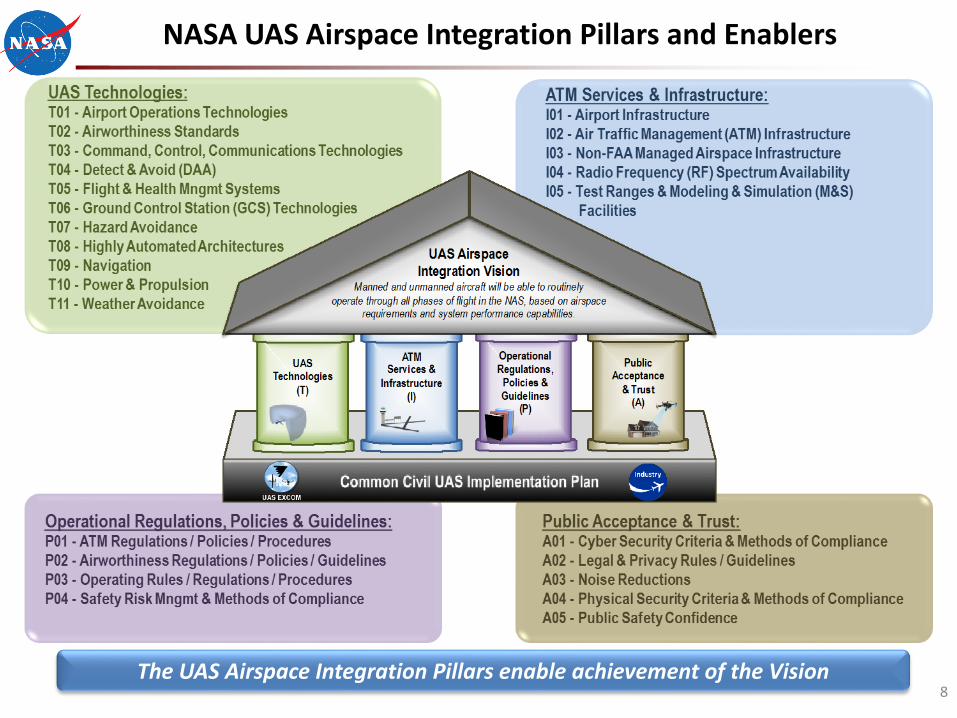
NASA UAS Airspace Integration Pillars and Enablers
8The UAS Airspace Integration Pillars enable achievement of the Vision
• The future civil UAS airspace environment is a complex picture with many unique considerations across the various operating environments– Operating environment attributes and community needs must be considered in order to
provide routine access for a diverse set of UAS demand scenarios
• UAS airspace access pillars are a simple decomposition method to structure the broad needs of this diverse community – UAS Airspace Access Enablers provide another layer of detail to consider research
elements necessary to achieve the routine access vision
• Assessing the intersections of the future civil UAS airspace environments and UAS airspace access pillars was the method chosen to develop the overarching UAS Community Strategy
– Operating Environment Roadmaps were developed around these intersections and the community needs necessary to enable routine UAS access
– Assessments were performed against “routine UAS access,” rather than an autonomous end state.
9
Overarching UAS Community Strategy
10
PR
OJE
CT
OF
FIC
E
LE
VE
L
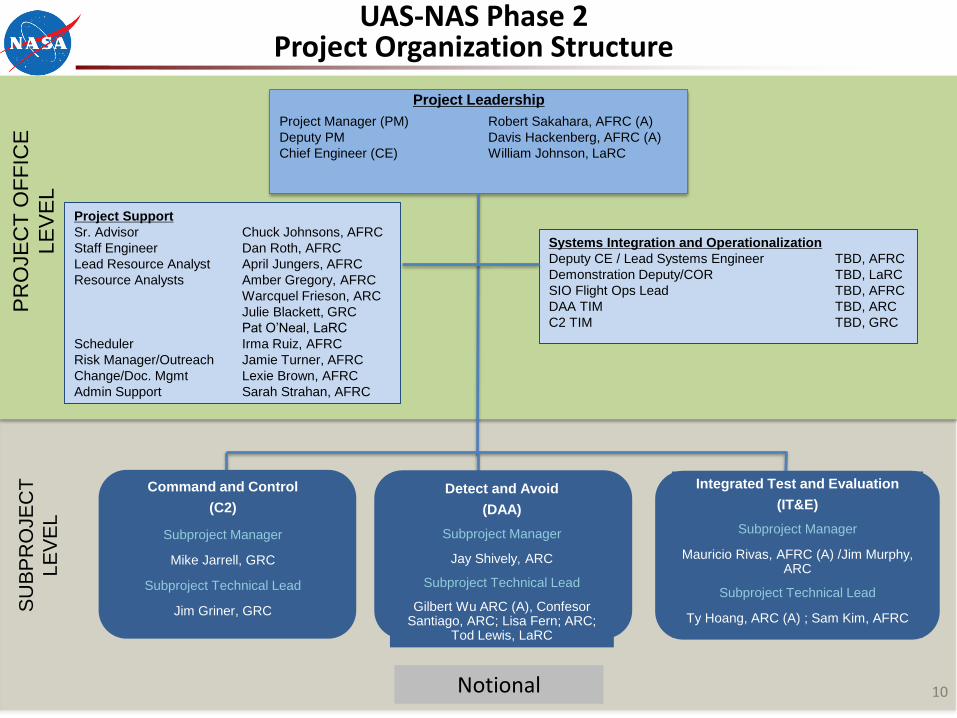
Systems Integration and Operationalization
Deputy CE / Lead Systems Engineer TBD, AFRC
Demonstration Deputy/COR TBD, LaRC
SIO Flight Ops Lead TBD, AFRC
DAA TIM TBD, ARC
C2 TIM TBD, GRC
Project Leadership
Project Manager (PM) Robert Sakahara, AFRC (A)
Deputy PM Davis Hackenberg, AFRC (A)
Chief Engineer (CE) William Johnson, LaRC
SU
BP
RO
JE
CT
LE
VE
L
Project Support
Sr. Advisor Chuck Johnsons, AFRC
Staff Engineer Dan Roth, AFRC
Lead Resource Analyst April Jungers, AFRC
Resource Analysts Amber Gregory, AFRC
Warcquel Frieson, ARC
Julie Blackett, GRC
Pat O’Neal, LaRC
Scheduler Irma Ruiz, AFRC
Risk Manager/Outreach Jamie Turner, AFRC
Change/Doc. Mgmt Lexie Brown, AFRC
Admin Support Sarah Strahan, AFRC
Detect and Avoid
(DAA)
Subproject Manager
Jay Shively, ARC
Subproject Technical Lead
Gilbert Wu ARC (A), Confesor Santiago, ARC; Lisa Fern; ARC;
Tod Lewis, LaRC
Integrated Test and Evaluation
(IT&E)
Subproject Manager
Mauricio Rivas, AFRC (A) /Jim Murphy, ARC
Subproject Technical Lead
Ty Hoang, ARC (A) ; Sam Kim, AFRC
Command and Control
(C2)
Subproject Manager
Mike Jarrell, GRC
Subproject Technical Lead
Jim Griner, GRC
UAS-NAS Phase 2Project Organization Structure
Notional
UAS Integration in the NAS Project
Technical Challenge-DAA: Detect and Avoid (DAA)
Technical Challenge-C2: Command and Control (C2)
11
Provide research findings, utilizing simulation and flight tests, to support the development and validation of DAA and C2 technologies necessary for integrating Unmanned Aircraft Systems into the National Airspace System
Project Goal
SIO: System Integration and
Operationalization for UAS (SIO)
DAA: Detect and Avoid
Develop Detect and Avoid (DAA) operational concepts and technologies in support of standards to enable a broad range of UAS that have Communication, Navigation, and Surveillance (CNS) capabilities consistent with IFR operations and are required to detect and avoid manned and unmanned air traffic
TC-DAA
Technical Challenge-DAA: Detect and Avoid (DAA)
Technical Challenge-C2: Command and Control (C2)
SIO: System Integration and
Operationalization for UAS (SIO)
12
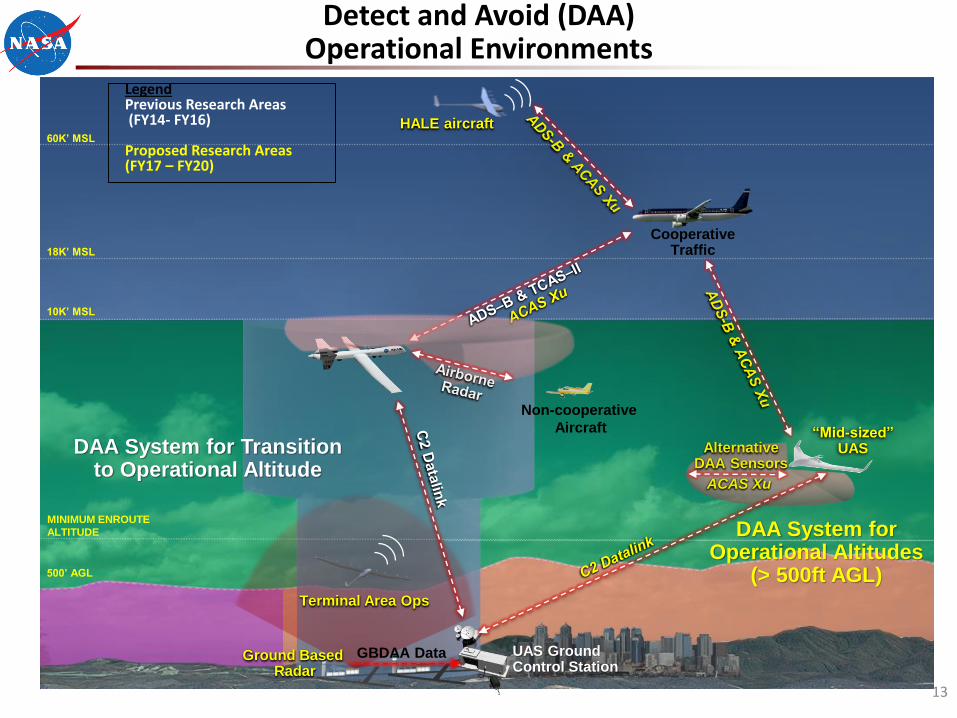
Detect and Avoid (DAA) Operational Environments
13
60K’ MSL
18K’ MSL
10K’ MSL
500’ AGL
MINIMUM ENROUTE
ALTITUDE
Cooperative Traffic
Non-cooperative
Aircraft
HALE aircraft
Ground Based Radar
UAS GroundControl Station
GBDAA Data
AlternativeDAA Sensors
ACAS Xu
“Mid-sized”UASDAA System for Transition
to Operational Altitude
DAA System for Operational Altitudes
(> 500ft AGL)Terminal Area Ops
LegendPrevious Research Areas(FY14- FY16)
Proposed Research Areas (FY17 – FY20)
C2: Command and Control
Develop Command and Control (C2) operational concepts and technologies in support of standards to enable the broad range of UAS that have Communication, Navigation, and Surveillance (CNS) capabilities consistent with IFR operations and are required to leverage allocated protected spectrum
TC-C2
Technical Challenge-DAA: Detect and Avoid (DAA)
Technical Challenge-C2: Command and Control (C2)
SIO: System Integration and
Operationalization for UAS (SIO)
14
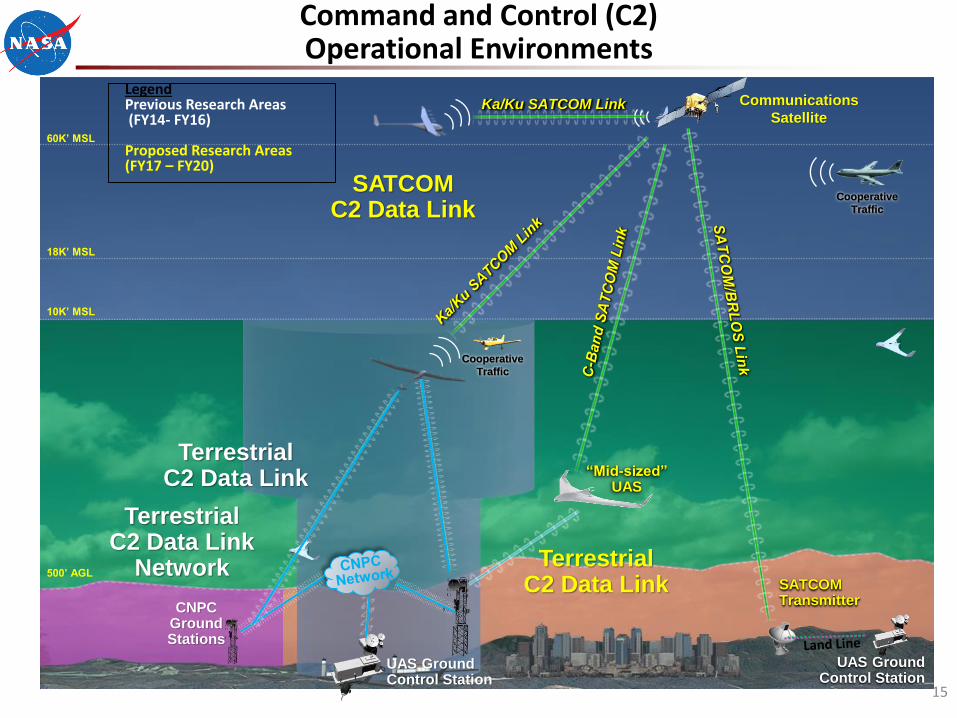
Command and Control (C2) Operational Environments
15
Cooperative
Traffic
60K’ MSL
18K’ MSL
10K’ MSL
500’ AGL
Cooperative
Traffic
Communications
Satellite
UAS GroundControl Station
SATCOMTransmitter
“Mid-sized”UAS
Ka/Ku SATCOM Link
SATCOM C2 Data Link
Terrestrial C2 Data Link
CNPC Ground Stations
UAS GroundControl Station
LegendPrevious Research Areas(FY14- FY16)
Proposed Research Areas (FY17 – FY20)
Terrestrial C2 Data Link
Terrestrial C2 Data Link
Network
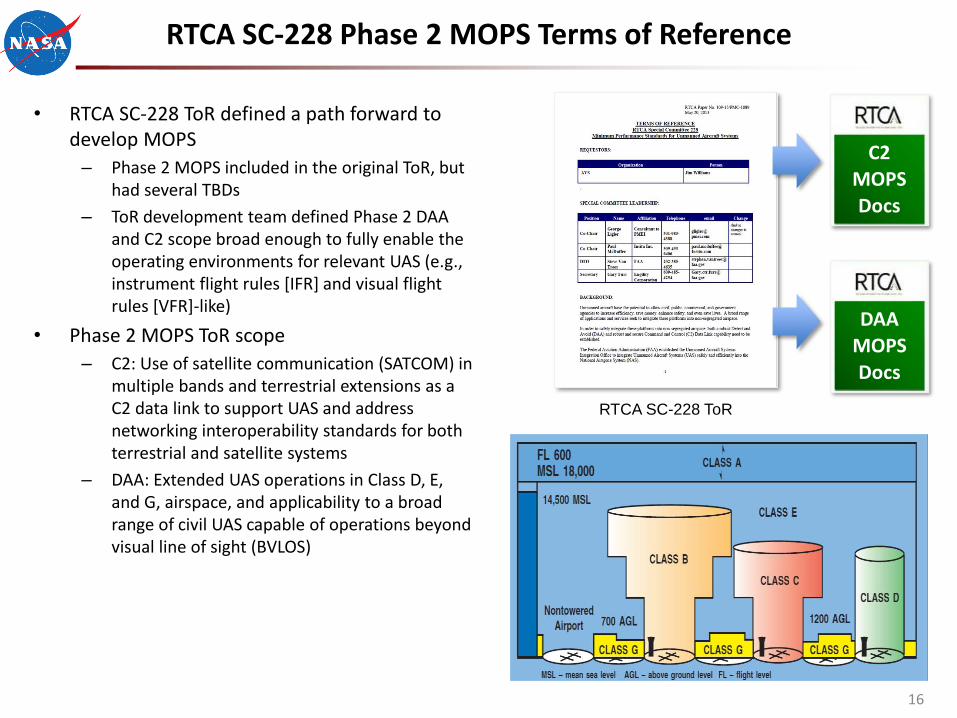
RTCA SC-228 Phase 2 MOPS Terms of Reference
• RTCA SC-228 ToR defined a path forward to develop MOPS
– Phase 2 MOPS included in the original ToR, but had several TBDs
– ToR development team defined Phase 2 DAA and C2 scope broad enough to fully enable the operating environments for relevant UAS (e.g., instrument flight rules [IFR] and visual flight rules [VFR]-like)
• Phase 2 MOPS ToR scope
– C2: Use of satellite communication (SATCOM) in multiple bands and terrestrial extensions as a C2 data link to support UAS and address networking interoperability standards for both terrestrial and satellite systems
– DAA: Extended UAS operations in Class D, E, and G, airspace, and applicability to a broad range of civil UAS capable of operations beyond visual line of sight (BVLOS)
16
C2MOPS
Docs
RTCA SC-228 ToR
DAAMOPS
Docs
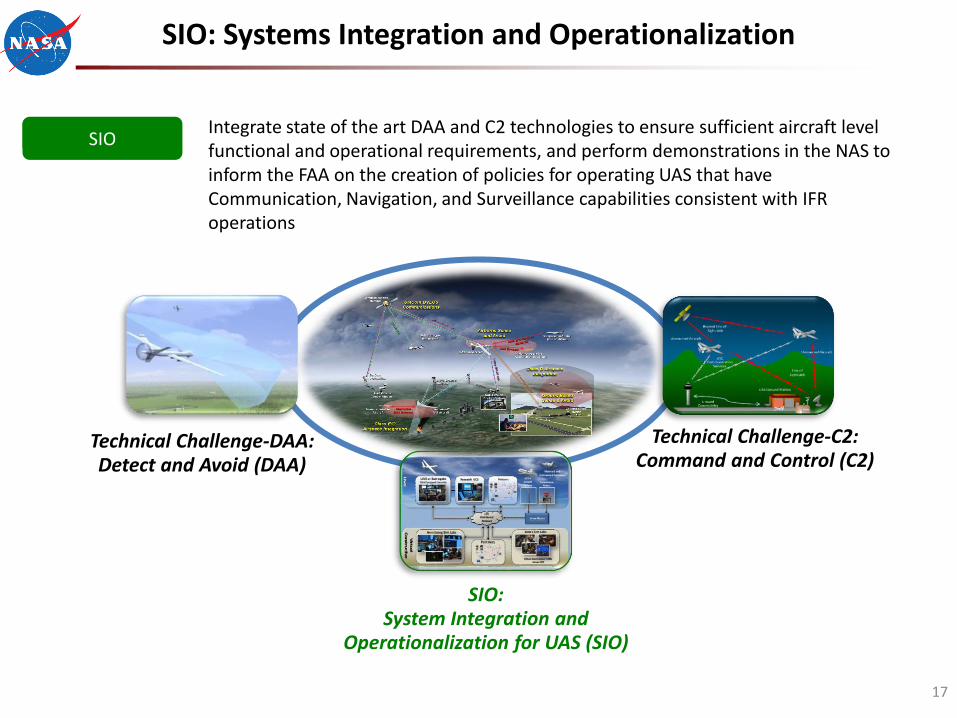
SIO: Systems Integration and Operationalization
Integrate state of the art DAA and C2 technologies to ensure sufficient aircraft level functional and operational requirements, and perform demonstrations in the NAS to inform the FAA on the creation of policies for operating UAS that have Communication, Navigation, and Surveillance capabilities consistent with IFR operations
Technical Challenge-DAA: Detect and Avoid (DAA)
Technical Challenge-C2: Command and Control (C2)
SIO: System Integration and
Operationalization for UAS (SIO)
17
SIO
Summary
• NASA has begun developing a cohesive strategy for full UAS Integration
• The strategy is based on the demand for four OEs – Low-Altitude Rural, IFR-Like, Low-Altitude Urban, and VFR-Like
• NASA has identified UAS Airspace Integration Pillars and Enablers to achieve the strategy
• The UAS-NAS Project has developed significant capabilities and infrastructure for the research of DAA, non-cooperative surveillance sensor, and C2 technologies
• The UAS-NAS Project is dedicated to driving the community toward robust and innovative solutions that apply to DAA, C2, and other necessary technologies
18