urządzenia elektroniki spinowej
TRANSCRIPT

Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie
al. Mickiewicza 30, 30-059 Kraków
Urządzenia elektroniki spinowej
Tomasz Stobiecki
Współautorzy:
Maciej Czapkiewicz, Jarosław Kanak, Witold Skowroński, Jerzy
Wrona
-3-
SPIS TREŚCI
1. Wstęp ................................................................................................................................. 7
2. Podstawy fizyczne zjawisk magnetorezystancyjnych w cienkich warstwach ........... 11
2.1. Proces przemagnesowywania cienkiej warstwy ferromagnetycznej z anizotropią
jednoosiową .......................................................................................................................... 11
2.2. Fenomenologia zjawisk galwanomagnetycznych ................................................... 12
2.3. Anizotropowy efekt magnetorezystancyjny ............................................................ 14
2.3.1. Kątowa zależność magnetorezystancji ................................................................. 16
2.3.2. Polowa zależność magnetorezystancji ................................................................. 18
2.4. Anomalny efekt Halla .............................................................................................. 20
2.4.1. Polowa zależność napięcia Halla ........................................................................ 23
2.5. Układy warstw magnetycznie sprzężonych ............................................................. 25
2.5.1. Oscylacyjne sprzężenie wymienne ........................................................................ 25
2.5.2. Procesy przemagnesowywania w układach warstw magnetycznie sprzężonych . 28
2.6. Gigantyczna magnetorezystancja GMR .................................................................. 30
2.6.1. Oscylacje w układzie wielowarstwowym NiFe/Cu ............................................... 33
2.7. Układ warstw magnetycznie sprzężonych z jednoosiową anizotropią
jednozwrotową typu "zawór spinowy"................................................................................. 36
2.7.1. Zawór spinowy typu GMR .................................................................................... 40
2.8. Magnetyczne złącze tunelowe ................................................................................. 44
2.8.1. Złącze tunelowe typu zawór spinowy ................................................................... 47
2.8.2. Sprzężenia magnetyczne w złączu tunelowym ...................................................... 49
2.8.3. Sprzężenie międzywarstwowe warstwa swobodna/przekładka/warstwa
zamocowana .................................................................................................................... 51
2.8.4. Sprzężenie kontaktowe antyferromagnetyk/ferromagnetyk .................................. 52
3. Aparatura technologiczna i wytwarzanie nanostruktur ............................................ 59
3.1. Nanoszenie warstw metodą rozpylania jonowego ................................................... 59
3.1.1. Aparatura ............................................................................................................. 59
3.1.2. Rozpylanie katodowe ............................................................................................ 62
3.2. Utlenianie bariery ..................................................................................................... 63
3.3. Wygrzewanie ............................................................................................................ 64
3.4. Litografia optyczna .................................................................................................. 65
3.4.1. Wytrawianie jonowe ............................................................................................. 65
3.5. Litografia elektronowa ............................................................................................. 66
4. Metody charakteryzacji strukturalnej przed procesem nanostrukturyzacji ........... 71
4.1. Dyfrakcja rentgenowska na cienkich warstwach ..................................................... 71
4.2. Dyfraktometr X’Pert MPD ....................................................................................... 71
4.3. Geometrie pomiarów ................................................................................................ 73
4.3.1. Pomiary w geometrii Bragga-Brentana ............................................................... 73
4.3.2. Pomiary w geometrii wiązki równoległej ............................................................. 74
4.4. Układy szczelin formujące wiązkę pierwotną i wtórną ........................................... 74
4.5. Rodzaje pomiarów dyfrakcyjnych w badaniach cienkich warstw ........................... 76
4.5.1. Pomiar θ-2θ .......................................................................................................... 76
4.5.2. Pomiar 2θ ............................................................................................................. 78

-4-
4.5.3. Pomiar ω .............................................................................................................. 79
4.5.4. Figury biegunowe ................................................................................................. 80
4.5.5. Reflektometria ...................................................................................................... 81
4.6. Wpływ warstw buforowych na mikrostrukturę i własności złącz tunelowych z
barierą Al-O .......................................................................................................................... 81
4.6.1. Pomiary θ-2θ ........................................................................................................ 82
4.6.2. Pomiary ω i figur biegunowych ........................................................................... 83
4.7. Szorstkość interfejsów .............................................................................................. 85
4.7.1. Reflektometria ...................................................................................................... 85
4.7.2. Szorstkości topologiczne-AFM ............................................................................. 87
4.7.3. Wpływ szorstkości na parametry złącza tunelowego: HNéel i TMR ...................... 88
4.8. Złącze tunelowe z barierą MgO ............................................................................... 91
5. Aparatura do pomiarów charakterystyk magnetycznych i elektrycznych ............... 99
5.1. Magnetometr R-VSM ............................................................................................... 99
5.2. Magnetometr efektu Kerra ..................................................................................... 101
5.3. Pomiar magnetorezystancyjnej pętli histerezy i charakterystyk prąd - napięcie.... 104
6. Symulacje numeryczne ................................................................................................ 109
6.1. Model jednodomenowy .......................................................................................... 109
6.1.1. Stan układu jako lokalne minimum energii ........................................................ 109
6.1.2. Gęstość energii w warstwie ferromagnetycznej - prosty model jednodomenowy ....
............................................................................................................................ 109
6.1.3. Przykładowe zastosowania modelu jednodomenowego ..................................... 111
6.2. Modele mikromagnetyczne .................................................................................... 114
6.2.1 Domeny w ferromagnetyku .................................................................................. 114
6.2.2. Model mikromagnetyczny ................................................................................... 115
6.2.3. OOMMF ............................................................................................................. 116
6.2.4. MAGPAR ............................................................................................................ 119
7. Zapis magnetyczny ....................................................................................................... 121
7.1. Analogowy zapis magnetyczny .............................................................................. 121
7.2. Twardy dysk ........................................................................................................... 123
7.2.1. Zapis podłużny i prostopadły .............................................................................. 128
7.2.2. Dyski przyszłości ................................................................................................. 129
7.3. Głowice dyskowe ................................................................................................... 132
7.3.1. Głowica – zawór spinowy GMR .......................................................................... 135
8. Pamięci magnetyczne ................................................................................................... 139
8.1 Pamięć MRAM ...................................................................................................... 139
8.2 Reprogramowalne spinowe układy logiczne .......................................................... 140
Skowowidz .................................................................................................................... 142

-5-
Rozdziały opracowali
1. Wstęp 7
(Tomasz Stobiecki)
2. Podstawy fizyczne zjawisk magnetorezystancyjnych w cienkich warstwach
(Tomasz Stobiecki, Maciej Czapkiewicz) 11
3. Aparatura technologiczna i wytwarzanie nanostruktur 59
(Tomasz Stobiecki, Jarosław Kanak, Witold Skowroński, Jerzy Wrona)
4. Metody charakteryzacji strukturalnej przed procesem nanostrukturyzacji
(Tomasz Stobiecki, Jarosław Kanak) 71
5. Aparatura do pomiarów charakterystyk magnetycznych i elektrycznych 99
(Tomasz Stobiecki, Jerzy Wrona)
6. Symulacje numeryczne 109
(Tomasz Stobiecki, Maciej Czapkiewicz)
7. Zapis magnetyczny 121
(Tomasz Stobiecki)
8. Pamięci magnetyczne 139
(Tomasz Stobiecki, Witold Skowroński)

-7-
1. Wstęp
W wielu opracowaniach przeglądowych z zakresu nanoelektroniki wyodrębnia się
elektronikę spinową (spintronikę), która dzięki kwantowym operacjom dokonywanym na
spinie elektronu stwarza możliwości projektowania nowej generacji cyfrowych układów
scalonych. Znaczący postęp w zakresie nanotechnologii materiałowej - w szczególności w
wytwarzaniu bardzo cienkich warstw metali i półprzewodników oraz ich nanostrukturyzacji
do postaci nano-urządzenia (nano-device) - umożliwia obecnie sterowanie operacjami
spinowymi na pojedynczych elektronach. Stąd powszechnym stało się stwierdzenie, że
spintronika wyznacza rozwój nanoelektroniki XXI wieku: „a new class of devices based on
the quantum nature of electron spin, rather than on charge, may yield the next generation of
electronics”.
Spinowo zależny transport ładunków prowadzi do efektów magnetorezystancyjnych
przewodnictwa elektrycznego takich jak: GMR (Giant Magnetoresistivity) i TMR (Tunneling
Magnetoresistivity). Najnowsze odkrycia w przedmiocie oddziaływań spinowo
spolaryzowanych elektronów z magnetyzacją pokazały, że prąd spinowo-spolaryzowany
wywołuje w warstwie magnetycznej moment skręcający jej magnetyzację czyli precesję
spinów (STT – Spin Transfer Torque), która prowadzi do ultraszybkiego (10-9 s) przełączania
magnetyzacji. Efekt ten zaobserwowano w zaworach spinowych wykazujących zjawisko
GMR i TMR. W metalicznych układach wielowarstwowych ferromagnetyków, w
przeciwieństwie do ferromagnetyków półprzewodnikowych, efekt STT zachodzi w
temperaturze pokojowej, czyniąc go dla zastosowań przemysłowych bardzo atrakcyjnym.
Dlatego wiele firm i instytutów badawczych w krajach produkujących układy scalone (w
Europie Francja i Niemcy, USA, Japonia, Korea, Singapur i Tajwan) zajęło się
opracowywaniem prototypów nowej generacji (szybszych, pojemniejszych i energetycznie
oszczędniejszych) magnetycznych pamięci RAM (M-RAM) oraz STT-RAM,
reprogramowalnych układów logicznych (RML) oraz STOs (Spin Transfer Oscillators) czyli
przetworników wysokiej częstotliwości (GHz) dla zastosowań w telekomunikacji.

-8-
Rys. 1.1. Mapa drogowa spintroniki, historia odkryć zjawisk magnetorezystancyjnych vs. urządzenia
elektroniki spinowej (rysunek wzorowany na Fig.28 z pracy [5]) Mapa drogowa spintroniki ma historię bardzo długą i jej początek można datować od dnia
odkrycia w 1856 roku przez lorda Kelvina anizotropowego efektu magnetorezystancyjnego
(AMR – Anisotropic Magnetoresistance). Kelvin pokazał, że pod wpływem małego
zewnętrznego pola magnetycznego w próbce ferromagnetyka, przez którą płynie prąd,
zmienia się jej rezystancja. Jednak dla zastosowań, na przykład w postaci czujnika pola
magnetycznego, istotnym jest aby przyrost magnetorezystancji był duży, dlatego dopiero w
drugiej połowie XX wieku - kiedy nastąpił znaczący postęp w technologii wytwarzania
cienkich warstw - widzimy bardzo wyraźny postęp w uzyskiwaniu bardzo dużych,
sięgających nawet 1000% (dla efektu TMR) względnych zmian przyrostu magnetorezystancji.
Kiedy naukowcy odkrywali nowe efekty magnetorezystancyjne zaraz pojawiały się pomysły i
urządzenia, w drugiej połowie XX wieku były to czujniki i głowice twardych dysków
wykorzystujące efekty AMR i GMR. Od roku 2010 dyski nowej generacji (zapis
prostopadły), produkowane przez takie firmy jak Hitachi czy Seagate, są obsługiwane przez
głowice TMR, które umożliwiają dzisiaj odczytywanie informacji o pojemności 1Tbit/cal2.
Odkrycie przez Slonczewskiego i Bergera zjawiska STT w 1996 roku, umożliwiło w
ubiegłym roku firmie Toshiba zbudować prototyp 64 Mb pamięci STT-RAM, najnowsze
doniesienia sygnalizują dalszy postęp i możliwość zastąpienia ROM i RAM uniwersalną nie

-9-
wymagającą odświeżania pamięcią STT-RAM. Efekt STT umożliwia zbudowanie nano-
oscylatorów i nano-generatorów pracujących w zakresie mikrofal, pierwsze prototypy
wytworzono i opatentowano.
Wspomniane zjawiska i urządzenia tworzące spintronikę metaliczną, działającą w
temperaturze pokojowej i wyższych, opisano w wielu pracach przeglądowych na przykład [1,
2, 3, 4, 5, 6,7]
W podręczniku “Urządzenia elektroniki spinowej” przeznaczonym dla studentów z
kierunków: elektronika, elektrotechnika, informatyka, fizyka i inżynieria materiałowa
dzielimy się z czytelnikami naszą wiedzą z teorii zjawisk magnetorezystancyjnych,
technologii wytwarzania, badaniem podstawowych własności (struktura, magnetyzm,
przewodnictwo elektryczne), działaniem laboratoryjnych modeli urządzeń elektroniki
spinowej. Zawarte w tym podręczniku wiadomości pochodzą z badań własnych autorów,
zostały wcześniej opublikowane (doktoraty, artykuły w czasopismach specjalistycznych) lub
są w trakcie publikowania.
[1] S. Tumański, Thin Film Magnetoresistive Sensors, Institute of Physics Publishing, Bristol
and Philadelphia 2001
[2] S. Parkin, X. Jiang, C. Kaiser, A. Panchula, K. Roche and M. Samant, Magnetically
Engineered Spintronic Sensors and Memory, Proceedings of the IEEE, 91, no. 5, (2003) 661
[3] J.A.C. Bland, B. Heinrich, Ultrathin Magnetic Structures III Fundamentals of
Nanomagnetism, Springer-Verlag Berlin Heidelberg 2005
[4] S. Ikeda, J. Hayakawa, Y. Min Lee, F. Matsukura, Y. Ohno, T. Hanyu, and H. Ohno,
Magnetic Tunnel Junctions for Spintronic Memories and Beyond, IEEE Transactions on
Electron Devices, 54, no. 5, (2007) 991
[5] S. Yuasa and D. D. Djayaprawira, Giant tunnel magnetoresistance in magnetic tunnel
junctions with a crystalline MgO(0 0 1) barrier, J. Phys. D: Appl. Phys. 40 (2007) R337
[6] S.D. Bader and S.S.P. Parkin, Spintronics, Annual Review of Condensed Matter Physics
1, 71-88 (Volume publication date August 2010)
[7] S. Bandyopadhyay, M. Cahay, Introduction to spintronics, CRC Press, 2008

-10-

-11-
2. Podstawy fizyczne zjawisk magnetorezystancyjnych w cienkich warstwach
W rozdziale tym opisano zjawiska galwanomagnetyczne: anizotropowy efekt
magnetorezystancyjny (Anisotropic Magnetoresistance – AMR), i anomalny efekt Halla
(Anomalous/Extraordinary Hall Effect – AHE/EHE) jakie obserwujemy podczas przepływu
prądu, w obecności zewnętrznego pola magnetycznego, przez cienką warstwę magnetyczną.
Przedyskutowano magnetyczne sprzężenia wymienne w układzie wielowarstwowym oraz
omówiono podstawy fizyczne zjawiska gigantycznej magnetorezystancji (Giant
Magnetoresistance – GMR) i tunelowej magnetorezystancji (Tunneling Magnetoresistance –
TMR). Strukturę warstw sprzężonych typu zawór spinowy (spin-valve) w przypadku elementu
GMR i złącza TMR przeanalizowano pod kątem zastosowania jako czujnika słabych pól
magnetycznych (np. elementu odczytowego głowicy twardego dysku).
2.1. Proces przemagnesowywania cienkiej warstwy ferromagnetycznej z anizotropią jednoosiową
Lokalne minimum funkcji gęstości energii, zależnej od pola magnetycznego, determinuje
orientację wektora namagnesowania. Proces przemagnesowania jednodomenowej próbki
magnetycznej z anizotropią jednoosiową można opisać ogólnym równaniem gęstości
objętościowej energii swobodnej [8]:
DUH EEEE ++= , (2-1) gdzie:
EH = −μ0M⋅H jest energią związaną z polem magnetycznym,
( )E KU U= − ⋅α α ' 2 jest energią anizotropii jednoosiowej, KU jest stałą anizotropii, α i α' są
wektorami jednostkowymi w kierunku M odpowiednio w stanie remanencji i w różnym od
zera polu magnetycznym,
E D D= − ⋅12 0H Mμ jest energią odmagnesowania, HD = −[N] ⋅μ0M jest polem odmagne-
sowania, [N] jest tensorem współczynników odmagnesowania.

-12-
Rys. 2.1. Cienka warstwa w polu magnetycznym, e.a. - oś łatwa (easy axis).
W przypadku konfiguracji próbki jak na rys. 2.1, człony energii we wzorze (2-1) można
zapisać w postaci:
( )( )γφβθβθμ −+−= cossinsincoscos0 HME SH
( ) θθαφ 222|||| cossincos ⊥⊥ −−−=+= UUUUU KKEEE
zakładając, że oś anizotropii jednoosiowej może leżeć w płaszczyźnie warstwy lub
prostopadle do niej,
( )θφθφθμ 2222220 cossinsincossin
21
zyXSD NNNME ++=
W przypadku cienkiej warstwy, której wymiary szerokości i długości są porównywalne, a
wymiar grubość jest od nich znacznie mniejszy (dx≈dy⟩⟩dz), elementy tensora
odmagnesowania wynoszą odpowiednio Nx=Ny ≈0 a Nz ≈1 [9].
2.2. Fenomenologia zjawisk galwanomagnetycznych Jeżeli przez izotropowy przewodnik pozostający w warunkach izotermicznych (gradT = 0)
przepływa prąd elektryczny, towarzyszy mu się pole elektryczne E zgodnie z prawem Ohma
jE ρ= , (2-2) gdzie: j jest wektorem gęstości prądu, ρ rezystywnością.
W przypadku przewodnika znajdującego się w polu magnetycznym o indukcji B, powstają
tzw. zjawiska galwanomagnetyczne, zależne od relacji między wektorami B i j. Dlatego
zamiast jednej liczby ρ należy zastosować tensor rezystywności ρik. W takim przypadku (przy
założeniu warunków izotermicznych) składowe wektora indukowanego pola elektrycznego E
można opisać [10] wzorem:

-13-
kiki jE )(Bρ= , (2-3)
gdzie elementy tensora ρik zależne są od indukcji B.
Tensor ten można rozbić na część symetryczną
s sik ik ki ki= + =12
( )ρ ρ
i antysymetryczną
a aik ik ki ki= − = −12
( )ρ ρ .
Korzystając z reguł Onsagera można udowodnić, że aik są nieparzyste względem B (np. efekt
Halla), a sik są parzyste względem B (np. magnetoopór). Definiując tzw. pseudowektor Halla
A=(a23, a31, a12), którego długość wynosi ρH (rezystywność Halla), można równanie (2-3)
napisać w postaci:
E s ji ik k i= + ×[ ]j A , (2-4) Po aproksymacji elementów tensora ρ wzorem Taylora drugiego rzędu względem B (co jest
dobrym przybliżeniem dla próbek polikrystalicznych) można równanie (2-4) zapisać jako
kombinację biliniową stałych galwanomagnetycznych i składowych indukcji magnetycznej B
oraz gęstości prądu j. Ponieważ w ferromagnetykach efektywne pole wewnętrzne zależy
przede wszystkim od namagnesowania, w przypadku cienkiej warstwy ferromagnetyka
zorientowanej względem układu współrzędnych kartezjańskich jak na Rys. 2.2, równanie
(2-4) można przekształcić [10] do postaci równania wektorowego:
( ) ( ) ( )jnjnnjE ×+⋅−+= ⊥⊥ Hρρρρ || , (2-5) gdzie:
n = M / |M| jest wersorem magnetyzacji (zorientowanym jak na Rys. 2.2)
φθ cossin=xn
φθ sinsin=yn
φcos=zn ,
Δρ = ρ⊥ - ρ⎜⎜ - anizotropia magnetorezystancji,
ρ⊥ - rezystywność właściwa mierzona gdy wektor namagnesowania nasycenia jest
prostopadły do kierunku przepływającego przez cienką warstwę prądu,
ρ⎜⎜ - rezystywność właściwa w przypadku gdy wektor namagnesowania nasycenia jest
równoległy do kierunku prądu,
ρ H - rezystywność Halla.

-14-
Rys. 2.2. Orientacja cienkiej warstwy, wektora namagnesowania i gęstości prądu w układzie
współrzędnych kartezjańskich.
Orientując układ współrzędnych z Rys. 2.2 tak aby j = jx a jy = jz = 0, otrzymujemy równania
dla składowych E:
φθρρ 22 cossinxxx jjE Δ+= ⊥ , (2-6)
θρφθρ coscossin21 22
xHxy jjE +Δ= , (2-7)
φθρφθρ sinsincos2sin21
xHxz jjE −Δ= . (2-8)
Jak widać z równania (2-6) składowa pola Ex określa podłużny efekt magnetorezystancyjny,
natomiast składowe: Ey równanie (2-7) i Ez równanie (2-8) pozwalają zmierzyć poprzeczne
efekty galwanomagnetyczne w konfiguracji pomiaru efektu Halla.
2.3. Anizotropowy efekt magnetorezystancyjny W przewodnictwie elektrycznym metali ferromagnetycznych udział bierze nie tylko pasmo
4s, ale również częściowo zapełnione pasmo 3d. Elektrony z pasma 4s mają małą masę
efektywną i są głównymi nośnikami prądu. Istnieje duże prawdopodobieństwo rozpraszania
swobodnych elektronów przewodnictwa z pasma 4s na dziurach częściowo obsadzonego
pasma 3d, którego elektrony posiadają dużą masę efektywną. W przypadku ferromagnetyka
pasmo 3d jest rozszczepione na dwa podpasma o spinach w górę i w dół (Rys. 2.3). Atomy
ferromagnetycznych metali przejściowych Fe, Co, Ni (Rys. 2.3) wykazują różnicę gęstości
stanów tych dwóch podpasm w okolicy energii Fermiego (EF), która powoduje spinową
zależność rozpraszania elektronów przewodnictwa. Elektrony podlegają zakazowi Pauliego,
mogą być one zatem rozpraszane tylko do nieobsadzonych stanów kwantowych.

-15-
Rys. 2.3. Obsadzenie pasm dla żelaza, kobaltu i niklu.
Wynika stąd różnica w prawdopodobieństwie rozpraszania w zależności od kierunku spinu
elektronu względem kierunku magnetyzacji domeny. Na poglądowym Rys. 2.4 przedstawiono
różnicę w rozpraszaniu elektronów przewodnictwa (różną średnią drogę swobodną), w
przypadku namagnesowania równoległego do prądu (a) i prostopadłego do prądu (b),
zakładając że oba wektory namagnesowania i gęstości prądu leżą w płaszczyźnie próbki.
Dla jasności rysunku pominięto inne źródła rozpraszania (jak np. fonony, domieszki, "spin-
flopping", efekty rozmiarowe w cienkiej warstwie), aczkolwiek mogą one zmniejszyć w
istotny sposób przyrost magnetorezystancji.
Rys. 2.4. Model dwuprądowy rozpraszania elektronów o przeciwnych spinach w próbce namagnesowanej
a) równolegle do wektora gęstości prądu, b) prostopadle. Po prawej stronie odpowiadające tym przypadkom modele sieci rezystorów (ciemniejszy kolor oznacza większą rezystancję).
Różnica średnich dróg swobodnych na rozpraszanie elektronów o przeciwnych orientacjach
spinowych ma wpływ na całkowitą magnetorezystancję próbki (dwuprądowy model Motta
[11]). Statystycznie połowa elektronów, ze spinem w górę, w przypadku (b) będzie napotykać
mniejszy opór niż pozostałe, ze spinem w dół. W przypadku (a) oba „strumienie” elektronów
będą napotykać statystycznie ten sam opór. Oba przypadki można przedstawić modelowo
jako połączone równolegle rezystory (Rys. 2.4).

-16-
Opór zastępczy modelu (b) jest mniejszy niż opór zastępczy modelu (a) wskutek efektu
bocznikowania elektrycznego poprzez małą rezystancję „strumienia” elektronów o spinie w
górę. Dlatego rezystywność właściwa ρ⊥ jest mniejsza niż ρ⎜⎜. Fenomenologiczny opis
anizotropowego zjawiska magnetorezystancyjnego i jego analizę w odniesieniu do metali i
stopów metali 3d z uwzględnieniem materiałów litych i cienkich warstw można znaleźć w
przeglądowej pracy McGuire'a i Pottera [12]. Natomiast kwantowo-mechaniczne modele
zjawiska magnetorezystancji w ujęciu oddziaływania spin-orbita opisane są między innymi w
pracy Marsocciego [13].
2.3.1. Kątowa zależność magnetorezystancji
Powracając do wzoru (2-5) rozpatrzmy jego szczególne przypadki, znajdujące praktyczne
zastosowania w czujnikach i głowicach magnetorezystancyjnych [14], charakterystyczne dla
jednodomenowej cienkiej warstwy z magnetyczną anizotropią jednoosiową w płaszczyźnie.
a)
b)
Rys. 2.5. Konfiguracje: a) podłużnego efektu magnetorezystancyjnego, b) poprzecznego efektu magnetorezystancyjnego (tzw. „płaskiego efektu Halla").
Jeżeli pole magnetyczne będzie przyłożone w płaszczyźnie warstwy to również wektor
namagnesowania będzie pod kątem θ=π/2 do osi z (Rys. 2.5). Podłużny efekt magneto-
rezystancyjny w tym przypadku opisany jest uproszczonym wzorem (2-6):
( ) φρρρ 2|| cosxxx jjE ⊥⊥ −+= . (2-9)
W praktyce mierzy się spadek napięcia Ux indukowany pomiędzy elektrodami, jak na Rys.
2.5. Oznaczając U⊥ = R⊥i oraz U⎜⎜ = R⎜⎜ i, gdzie R⊥ oraz R⎜⎜ są rezystancjami mierzonymi gdy
prąd i przepływa wzdłuż lub w poprzek kierunku namagnesowania próbki, możemy równanie
(2-9) napisać w postaci:

-17-
U UU U
x −−
=⊥
⎢⎢ ⊥
cos2 φ , (2-10)
Powyższą zależność można udowodnić eksperymentalnie poprzez pomiar spadku omowego
napięcia w próbce obracanej w polu nasycającym czyli polu większym od pola anizotropii
jednoosiowej (Rys. 2.6). W takim przypadku wymuszana jest rotacja wektora magnetyzacji,
co w układzie odniesienia związanym z próbką oznacza zmianę kąta φ.
0 20 40 60 80 1000
1
Znor
mal
izow
ane
napięc
ie
φ [M,j]
50 nm Ni80Fe20
μ0H = 0.11 TΔr/r|| = 2.39%
Rys. 2.6. Zależność względnej zmiany napięcia Ux od kąta φ. Punkty - wartości doświadczalne, linia -
funkcja cos2φ. Pomiar cienkiej warstwy Ni80Fe20 o polu anizotropii jednoosiowej μ0Hu=0.43 mT (Hu=4.3 Oe).
Rozpatrując sposób pomiaru Uy jak na (2-5) możemy równanie (2-7), podobnie jak
w przypadku pomiaru napięcia podłużnego Ux, przekształcić do postaci:
22
UU U
y
⎢⎢ ⊥−= sin φ , (2-11)
.
Dokonując pomiaru kątowego, jak wyżej opisany, można powyższą zależność udowodnić
eksperymentalnie (Rys. 2.7).

-18-
0 40 80 120 160 200
-0,8
-0,4
0,0
0,4
0,8
Znor
mal
izow
ane
napięc
ie
φ [M,j]
50 nm Ni80Fe20m0H = 0.12 T
Rys. 2.7. Zależność względnej zmiany napięcia Uy od kąta φ. Punkty - wartości doświadczalne, linia - funkcja sin2φ. Pomiar cienkiej warstwy Ni80Fe20 o polu anizotropii jednoosiowej μ0Hu=0.43 mT.
2.3.2. Polowa zależność magnetorezystancji Przy założeniu wyłącznie anizotropii jednoosiowej w płaszczyźnie (KU⊥=0), jeżeli zewnętrzne
pole magnetyczne H leży w płaszczyźnie i skierowane jest wzdłuż osi y-y (θ = β = γ = π/2
z 2.1), równanie (2-1) gęstości energii swobodnej przekształca się do postaci:
E M H Ks U= − − −μ φπ
φ02
2cos( ) cos|| . (2-12)
Z warunków na minimum E(φ ) czyli dEdφ
= 0 oraz 02
2
>φd
Ed ,
otrzymujemy:
sin||
φμ
= 0
2M
KHs
U
. (2-13)
Korzystając z równań (2-10) i (2-13) otrzymuje się zależność napięcia związanego z
podłużnym efektem AMR w funkcji pola magnetycznego przemagnesowywującego próbkę w
kierunku trudnym:
U UU U
HH
x
u
−−
= −⎛⎝⎜
⎞⎠⎟⊥
⎢⎢ ⊥
12
, (2-14)
gdzie Hu = 2KM
u
s
|| jest polem anizotropii jednoosiowej [15, 16].
Powyższą zależność ilustruje przykład pomiaru cienkiej warstwy Ni80Fe20 z anizotropią
jednoosiową (Rys. 2.8).

-19-
-2 -1 0 1 20,0
0,5
1,0
Znor
mal
izow
ane
napięc
ie
μ0H [mT]
50 nm Ni80Fe20
μ0HU = 0.43 [mT]
Rys. 2.8. Zależność względnej zmiany napięcia UX od pola magnetycznego prostopadłego do prądu.
Punkty oznaczają wartości doświadczalne, linia ciągła odpowiada równaniu (2-14).
Odstępstwo od zależności parabolicznej w otoczeniu ±HU jest spowodowane tym że
rzeczywista próbka jest wielodomenowa i wykazuje dyspersję wektora namagnesowania w
polach |H|>|HU| [17].
W przypadku pomiaru napięcia Uy (Rys. 2.5b), gdy próbka jest przemagnesowywana w
kierunku trudnym polem magnetycznym leżącym w płaszczyźnie warstwy, ze wzorów (2-11)
i (2-13) otrzymujemy:
UU U
HH
HH
y
u u⎢⎢ ⊥−= ± −
⎛⎝⎜
⎞⎠⎟1
2
. (2-15)
Teoretyczny, wyrażony równaniem (2-15) i rzeczywisty przebieg poprzecznego efektu
magnetorezystancyjnego przedstawia Rys. 2.9:

-20-
-0,6 -0,4 -0,2 0,0 0,2 0,4 0,6
-0,8
-0,4
0,0
0,4
0,8
Znor
mal
izow
ane
napięc
ie
μ0H [mT]
50 nm Ni80Fe20
μ0HU = 0.43 [mT]
Rys. 2.9. Zależność względnej wartości napięcia UY od od pola magnetycznego prostopadłego do prądu. Punkty oznaczają wartości doświadczalne, linia ciągła równanie (2-15).
Odstępstwa przebiegu eksperymentalnego od teorii mają takie same pochodzenie jak
w przypadku podłużnego efektu magnetorezystancyjnego.
2.4. Anomalny efekt Halla W przypadku gdy na przewodzącą prąd cienką warstwę działa pole indukcji magnetycznej B
prostopadłe do warstwy, występuje tzw. normalny efekt Halla. Jest on wywołany działaniem
siły Lorentza na elektrony przewodnictwa, która powoduje powstawanie składowej pola
elektrycznego wyrażonej klasycznym wzorem ((2-7) dla Θ = 0o), Ey = ρH jx = R0Bzjx, gdzie R0
jest normalną stałą Halla. W przypadku próbek ferromagnetycznych występuje ponadto
anomalny efekt Halla, zwany dalej AHE (Anomalous Hall Effect). W takim przypadku
rezystywność Halla [18] wyraża się wzorem:
1000 MRHR iH μμρ += . (2-16) gdzie:
Hi jest wewnętrznym polem magnetycznym czyli efektywnym polem zależnym od pola
zewnętrznego (H), anizotropii próbki (HU), jej kształtu (HD) i struktury domenowej,
M jest magnetyzacją próbki, dla pola H większego od pola nasycającego HS namagnesowanie
M równa się namagnesowaniu nasycenia MS,
R1 jest anomalną stałą Halla.
Rozpatrując najprostszy przypadek izotropowej, jednodomenowej cienkiej warstwy można
przyjąć Hi =H+HD gdzie HD = −NzM a Nz≈1. W takim przypadku równanie (2-16) można
przedstawić w postaci:
( ) 1000 MRMHRH μμρ +−= . (2-17)

-21-
Wprowadzając wielkość RS = R1−R0, zwaną spontaniczną stałą Halla, powyższe równanie
można zapisać jako:
SH MRHR 000 μμρ += . (2-18)
Widać, że dla pól H>HS zależność (2-18) reprezentuje linię prostą w postaci
ρH (H) = μ0R0H + ρHS, gdzie ρHS = μ0RS MS nazywana jest spontaniczną rezystywnością
Halla.
Natomiast dla H = HS = μ0MS : ρH (HS) = μ0R1MS, a więc R1 określa nachylenie ρH (H) w
zakresie H<HS. W praktyce stałą R1 wygodnie jest określić poprzez nachylenie ρH (H) dla
małego (w porównaniu z HS) zakresu pola:
RH
H
H1
0
=⎛⎝⎜
⎞⎠⎟
→
∂ρ∂
(2-19)
W ferromagnetykach anomalna stała Halla R1 jest dużo większa od stałej lorentzowskiego
efektu Halla R0 [19] a więc RS ≈R1.
Jak wykazały badania eksperymentalne [20,21], spontaniczna stała Halla związana jest z
rezystywnością właściwą ρ wzorem
R a bS = +ρ ρ 2 , (2-20) gdzie a oraz b są współczynnikami (zależnymi od temperatury) związanymi z różnymi
modelami rozpraszania elektronów przewodnictwa. Współczynnik stojący przy wykładniku
n=1 można uzasadnić modelem skośnego rozpraszania elektronów (z ang. skew scattering)
[22], opartym na klasycznym równaniu Boltzmanna. Według tego modelu trajektoria
elektronu zmienia się o kąt δ (Rys. 2.10a) taki że:
tanδρρ
μρ
μ= = =HS S SS
M RM a0
0 . (2-21)
Natomiast współczynnik b przy wykładniku n=2 w równaniu (2-20) związany jest z modelem
rozpraszania bocznego (side jump) czyli równoległego przesunięcia elektronu o Δy od jego
pierwotnej trajektorii (Rys. 2.10b). Parametr przesunięcia bocznego Δy zależy od
oddziaływania spin-orbita: Δy = λs-o<SZ>kF, gdzie <SZ> jest średnią wartością spinu elektronu
wzdłuż wektora pola H, a λs-o jest efektywną stałą sprzężenia spin-orbita. Berger pokazał [20],
że w pierwszym przybliżeniu Borna, stosując model elektronów swobodnych, można
otrzymać zależność

-22-
Δy M bk
n e e kSF
e FHS= =μ
πγ0 2 2 2
32
h h, (2-22)
gdzie ne - koncentracja elektronów, e - ładunek elementarny, kF - wektor Fermiego, γHS -
spontaniczne przewodnictwo Halla, które można wyrazić zależnością:
γρρ
μρHS
HS S SM R= =2
02 . (2-23)
Rys. 2.10. Modele rozpraszania elektronów: a) rozpraszanie skośne, b) rozpraszanie boczne [21].
Z badań eksperymentalnych wynika, że w temperaturach pokojowych występowanie AHE w
ferromagnetycznych materiałach amorficznych [23] i większości nieuporządkowanych
stopów polikrystalicznych [20] wiąże się z mechanizmem rozpraszania bocznego, ponieważ
wyznaczony wykładnik n jest bliski wartości 2.
2.4.1. Polowa zależność napięcia Halla
W układzie pomiarowym jak na Rys. 2.11 składowa pola elektrycznego w kierunku y jest
wyrażona równaniem (2-6).

-23-
Rys. 2.11. Konfiguracja cienkiej warstwy w układzie kartezjańskim przy pomiarze efektu Halla.
Pierwszy człon tego równania można zaniedbać w przypadku, gdy ρρ
H ⟩⟩Δ2
, oraz gdy kąt θ
dąży do zera (co jest prawdą w przypadku dużych H prostopadłych do płaszczyzny warstwy).
W takich przypadkach wzór (2-7) można uprościć do postaci:
θρ cosxHy jE = . (2-24) Podtrzymując ogólne założenia przyjęte w rozdziale 2.1 i korzystając z faktu, że
przemagnesowywanie zachodzi w kierunku normalnym do płaszczyzny próbki (β=0 z 2.1)
można wzór (2-1) na gęstość energii przedstawić w postaci:
θμθθφθμ 220
222||0 cos
21cossincoscos SS MKKHME +−−−= ⊥ . (2-25)
Z warunków na minimum energii względem kąta θ (zakładając, że φ=0):
dEdθ
= 0 oraz 02
2
>θd
Ed ,
otrzymujemy:
HKKM
M
S
S
⊥−+=
22cos
||2
0
0
μμ
θ . (2-26)
Tak więc pole nasycające, przy którym wektor magnetyzacji będzie prostopadły do
płaszczyzny warstwy, wynosi:
S
SS M
KKMH
0
||2
0 22μ
μ ⊥−+= . (2-27)

-24-
Jak łatwo zauważyć z powyższego wzoru, jeśli warstwa będzie izotropowa (K|| =K⊥ =0) to
SS MH 0μ=
Przy czym HS jest wyrażone w teslach [T].
Korzystając z zależności (2-17), (2-24) i (2-26) można rozpatrzyć dwa przypadki:
dla małych pól (H<HS) można, korzystając z faktu, że RS⟩⟩ R0 i MS⟩⟩Hi, zapisać wzór (2-24)
jako
( )S
SSxy HHRRMjE +≈ 00μ stąd Ey ∼ R1 H
a dla pól większych od pola nasycającego (H>HS a więc cosθ=1)
SSxy MRHRjE 000 μμ += stąd Ey ∼ R0 H + const
Pole elektryczne Ey można wyrazić przez napięcie Halla (Uy), jako funkcję pola
magnetycznego dla: małych pól H<HS
Uit
M RHHY S
S= μ0 1 , (2-28)
dużych pól H>HS :
-0.8 -0.6 -0.4 -0.2 0.0 0.2 0.4 0.6 0.8-1.0
-0.5
0.0
0.5
1.0
UY [m
V]
μ0H [mT]
Ni, t = 200 nm
a
b
HS
Rys. 2.12. Zależność napięcia Halla od zewnętrznego pola magnetycznego dla cienkiej warstwy Ni. Linie proste a, b opisane przez równania (2-28) i (2-29).
Nachylenie prostej b (dla H>HS) na Rys. 2.12 jest dodatnie, pomimo że dla niklu R0<0 [24].
W rzeczywistości bowiem namagnesowanie nasycenia ferromagnetyka jest słabo rosnącą
funkcją pola (MS(H)=χH, gdzie χ jest wysokopolową podatnością magnetyczną) dla pól
większych od pola nasycającego. Dlatego wyrażenie μ0MSRS nie jest stałe i z nachylenia
( )Uit
R H M RY S S= +μ μ0 0 0 . (2-29)

-25-
prostej dla H>HS nie można wyznaczyć wprost stałej R0 (tak jak w przypadku metali
nieferromagnetycznych lub półprzewodników). Normalną stałą Halla (R0) ferromagnetyka
wyznacza się w temperaturach wyższych od temperatury Curie [18].
2.5. Układy warstw magnetycznie sprzężonych
2.5.1. Oscylacyjne sprzężenie wymienne W 1986 roku Grünberg [25] zaobserwował antyferromagnetyczne sprzężenie pomiędzy
dwiema warstwami Fe oddzielonymi cienką warstwą Cr. Wkrótce, bo w 1988 roku Baibich i
inni [26] stwierdzili, że opór elektryczny warstw wielokrotnych Fe/Cr maleje ze wzrostem
pola magnetycznego, a jego zmiana (pomiędzy H=0 i polem nasycającym) zależy od
grubości warstwy Cr. W 1990 roku Parkin odkrył, że sprzężenie pomiędzy dwiema
warstwami Fe oddzielonymi cienką warstwą Cr wykazuje charakter oscylacyjny względem jej
grubości d [27]. Od tego czasu oscylacyjne sprzężenie wymienne wykryto jeszcze w wielu
innych układach wielowarstwowych typu ferromagnetyk/przekładka nieferromagnetyczna/
ferromagnetyk [28]. Ujemne wartości J odpowiadają sprzężeniu antyferromagnetycznemu
(wektory namagnesowania warstw ferromagnetycznych zorientowane są antyrównolegle
względem siebie), natomiast dodatnie wartości J odpowiadają sprzężeniu
ferromagnetycznemu (wektory namagnesowania zorientowane są równolegle względem
siebie). Amplituda oscylacji J silnie maleje z grubością przekładki jak d −k gdzie k≈2.
Zjawisko staje się niemierzalne dla d>3nm [29].
Opracowano wiele modeli teoretycznych i półempirycznych, które, często po uwzględnieniu
rozmaitych poprawek, dość dobrze opisują zjawisko oscylacyjnego sprzężenia wymiennego.
Większość z nich wywodzi się z modelu RKKY biorącym swą nazwę od nazwisk Ruderman,
Kittel, [30], Kasuya, [31], Yosida [32]. W modelu RKKY rozważane jest sprzężenie pomiędzy
momentami magnetycznymi jonów za pośrednictwem gazu elektronów przewodnictwa s
oddziaływującego ze zlokalizowanymi elektronami powłoki d. Hamiltonian oddziaływania
pomiędzy zlokalizowanym spinem Sn a niezlokalizowanym spinem si ma postać:
gdzie Jsd jest funkcją zależną od wektora falowego rozproszonego elektronu.
Następnym krokiem jest wyliczenie hamiltonianu oddziaływania RKKY pomiędzy dwoma
zlokalizowanymi spinami jąder n oraz n’:
H J R R S Sdd n n n n= − −( )' ' ,
gdzie:
H J r R S ssd sd i n n i= −∑ , (2-30)

-26-
∑=q
qRsd eqqJ
NRJ i2 )()(2)( χ ,
a χ jest podatnością gazu elektronów swobodnych zależną od położenia w sieci odwrotnej:
χε ε
( )'
qN
f fk k q
k k=
−
−+∑1
,
gdzie f(ε) jest rozkładem Fermiego-Diraca.
W przybliżeniu elektronów swobodnych, przy założeniu że jsd(q)=j, całka wymiany jest w
postaci
gdzie wyrażenie w nawiasie kwadratowym nazywa się funkcją zasięgu RKKY i dla dużych
wartości R zachowuje się w przybliżeniu jak cosxx 3 (funkcja okresowa o zanikającej
z odległością amplitudzie i okresie π/kF =λF/2).
Powyższy model można rozszerzyć z oddziaływania pomiędzy dwoma magnetycznymi
atomami na oddziaływanie pomiędzy dwiema magnetycznymi warstwami [33]. Zakładając
ciągły rozkład spinów o zadanej gęstości, a więc zastępując sumowanie we wzorze (2-30)
całkowaniem, otrzymuje się wyrażenie na funkcję zasięgu w postaci:
a więc jest to funkcja oscylacyjna o amplitudzie malejącej dla dużych R jak R−2, co lepiej
zgadza się z wynikami eksperymentalnymi niż model (2-31). Natomiast okres tych oscylacji
(π/kF) jest o wiele mniejszy niż okres oscylacji zaobserwowanych w rzeczywistości. Jest to
spowodowane faktem, że funkcja zasięgu może mieć fizycznie uzasadnione wartości tylko dla
dyskretnych wartości R, będących wielokrotnością stałej sieci, która jest nieco większa niż
okres oscylacji J(R). Wartościom tym odpowiadają punkty na Rys. 2.13, jeżeli połączymy je
linią przerywaną to otrzymamy „udawany” przebieg o znacznie większym okresie (tzw.
aliasing). Efektywny okres takiego przebiegu będzie wynosił π/(kF −Q) gdzie Q jest
wektorem sieci odwrotnej.
( )( ) ( )
J Rj k R
k R
k R
k RF
F
F
F
F
= −⎡
⎣
⎢⎢
⎤
⎦
⎥⎥
92
2
2
23 4π
εcos sin
, (2-31)
( )( )
( )( ) ⎥
⎥⎦
⎤
⎢⎢⎣
⎡− 32 2
2cos5
22sin
RkRk
RkRk
F
F
F
F , (2-32)

-27-
5 10 15 20 25
0,0
funkcja zasięgu próbkowanie wartości
J [a
.u]
kolejne płaszczyzny sieciowe
Rys. 2.13. Funkcja zasięgu (2-32) próbkowana odległościami międzypłaszczyznowymi (aliasing).
Skorygowane przez uwzględnienie poprawki na efekt aliasingu wartości stałej sprzężenia J
zgadzają się z wynikami eksperymentalnymi, np. dla warstw Co/Cu [34,35].
2.5.2. Procesy przemagnesowywania w układach warstw magnetycznie sprzężonych
Modele teoretyczne procesów przemagnesowania w warstwach ferromagnetycznych
przedzielonych warstwą niemagnetyczną zostały przedstawione między innymi w pracach
Dieny i Gavgina [36] czy Schmidta [37]. Poniżej opisany będzie prosty model dwóch
ferromagnetycznych warstw o grubościach t1, t2, rozdzielonych przekładką niemagnetyczną (z
ang. spacer) o grubości d (Rys. 2.14).
Rys. 2.14. Układ wielowarstwowy ferromagnetyk/przekładka nieferromagnetyczna/ferromagnetyk.

-28-
Zakładając, że zewnętrzne pole magnetyczne H leży w płaszczyźnie warstwy, energię układu
przedstawionego na Rys. 2.14, na jednostkę powierzchni, opisuje ogólne równanie:
Pierwszy człon jest odpowiedzialny za sprzężenie wymienne typu Heisenberga
(ferromagnetyczne gdy J>0 lub antyferromagnetyczne gdy J<0). Drugi człon równania
opisuje sprzężenie bikwadratowe o stałej sprzężenia JB, preferujące ustawienie wektorów
namagnesowania w poszczególnych warstwach pod kątem 90o względem siebie. Trzeci człon
związany jest z przemagnesowaniem w zewnętrznym polu magnetycznym H. Ostatni człon to
energia związana ze stałymi anizotropii jednoosiowej KU1 i KU2 .
Rozpatrzmy uproszczony przypadek, gdy grubości subwarstw ferromagnetycznych są takie
same (t1=t2=t) i można zaniedbać anizotropię jednoosiową (KU1=KU2=0) oraz sprzężenie
bikwadratowe (JB=0) [38, 39]. Wtedy przy założeniu istnienia sprzężenia
antyferromagnetycznego (J = JAF <0) układ z Rys. 2.14 staje się symetryczny względem pola
H (θ1 = −θ2 = θ ) i równanie (2-33) redukuje się do postaci:
Wektor M ustawi się pod takim kątem θ, dla którego energia całkowita jest najmniejsza. W
przypadku próbki nasyconej, i warunków na minimum E(θ ) czyli
dEdθ
= 0 oraz d Ed
2
2 0θ
> ,
otrzymujemy zależność:
Rozpatrując powyższą zależność w przypadku próbki nasyconej (θ = 0) otrzymujemy wzór na
pole nasycające HS, które jest odwrotnie proporcjonalne do grubości warstwy
ferromagnetyka. Dla warstw wielokrotnych pole HS jest dwukrotnie większe, ponieważ każda
warstwa ferromagnetyczna ma dwóch ferromagnetycznych sąsiadów [40], stąd:
E J
J
t M H t M H
K t K t
B
U U
= − −
− −
− −
− −
cos( )
cos ( )
cos( ) cos( )
cos ( ) cos ( )
θ θ
θ θ
μ θ μ θ
θ θ
1 2
1 2
1 1 1 2 2 2
1 1 1 2 2 2
2
0 0
2 2
. (2-33)
( ) ( )θμθ cos22cos 0 SHMtJE −−= . (2-34)
HJ
M tAF
S
= −2
0
cos( )θμ . (2-35)

-29-
Przekształcając powyższą zależność można uzyskać wzór umożliwiający obliczenie stałej
sprzężenia antyferromagnetycznego JAF :
jeśli znamy wartości pola HS i magnetyzacji MS wyznaczone z pomiaru M(H). Stała JAF jest
ujemna, a jej wyznaczanie ma sens fizyczny tylko w przypadku sprzężenia
antyferromagnetycznego.
Zakładając, że pole H leży wzdłuż osi x jak na Rys. 2.14, namagnesowanie wynosi
M=MScos(θ), więc po porównaniu ze wzorem (2-35) wynika że:
czyli M jest liniowo zależne od H aż do wartości pola nasycającego HS jak przedstawiono na
Rys. 2.15a.
-10 0 10
-1
Ni-Fet=1.8/Cud=2.05
A -FJ= −0.6 [10-6 J/m2]μ0MS= 0.59[T]
H/HS
μ0H [mT]
a) 1
-10 0 10-1
0
1
Ni-Fet=1.8 / Cud=0.78
M [a
.u.]
μ0H [mT]
b)
μ0H
C = 0.2 [mT]
F-F
Rys. 2.15. Przykładowe krzywe przemagnesowania (pętle histerzezy) w przypadku sprzężenia a) antyferromagnetycznego, b) ferromagnetycznego. Punkty odpowiadają pomiarowi rzeczywistej próbki
NiFe/Cu, linia jest wynikiem numerycznego obliczania minimum funkcji danej wzorem (2.31) przy J=-0.6 J/m2, μ0 MS =0.59 T.
W przypadku sprzężenia ferromagnetycznego obydwa wektory magnetyzacji układają się pod
tym samym kątem θ1=θ2=θ więc człon -Jcos(θ1-θ2) w równaniu (2-33) jest stałą, co powoduje
degenerację zależności M(H) do funkcji dwuwartościowej MS sign(H) (Rys. 2.15b).
H JM tsAF
s= −
4
0μ. (2-36)
JM H t
AFS S= −
μ0
4, (2-37)
M HM tJ
HS
AF
( ) = −μ0
2
4, (2-38)

-30-
W rzeczywistych przypadkach próbka posiada prostokątną pętlę histerezy, której rozwartość
zależy od wartości pola koercji HC. W układach wielowarstwowych NiFe/Cu μ0HC<0.2 mT.
2.6. Gigantyczna magnetorezystancja GMR W rozdziale 2.3 opisano anizotropowy efekt magnetorezystancyjny (AMR) w cienkich
warstwach ferromagnetycznych. Względny przyrost AMR osiąga niewielkie wartości,
największe otrzymano dla stopów NiFe - do 5% [41]. Okazuje się jednak, że w warstwach
ferromagnetyk/przekładka nieferromagnetyczna/ferromagnetyk (w przypadku grubości
przekładki, dla której występuje sprzężenie antyferromagnetyczne między warstwami
ferromagnetycznymi, opisane w poprzednim rozdziale) występuje również tzw. Gigantyczna
Magnetorezystancja, zwana dalej GMR (Giant Magnetoresistance). Nazwa wiąże się z
faktem, że GMR może osiągać wartości nawet o rząd wielkości większe niż AMR (65% dla
Co/Cu w polu magnetycznym o indukcji 150 mT [42]).
W ferromagnetykach, jak już wspomniano w rozdziale 2.3 poniżej temperatury Curie
mechanizm przewodnictwa elektrycznego uzależniony jest od orientacji spinowej elektronów
i można go opisać tzw. modelem „dwu-prądowym”, w którym średnie drogi swobodne a więc
i przewodnictwa są różne dla elektronów o spinie w górę (↑) i spinie w dół (↓) [43]. Zakłada
się, że rozpraszanie elektronów przewodnictwa zachodzi na granicach między warstwami, a
ich średnia droga swobodna jest znacznie dłuższa od grubości subwarstw struktury
wielowarstwowej. Na rysunku 2.16 przedstawiono schematycznie mechanizm rozpraszania
elektronów w przypadku uporządkowania ferro- i antyferromagnetycznego, na tle
rzeczywistej krzywej względnej zmiany magnetorezystancji. W zerowym polu magnetyzacje
subwarstw są uporządkowane antyrównolegle więc prawdopodobieństwo rozpraszania
elektronów o spinie ↑ i ↓ jest takie samo (stan wysokiej rezystancji R↓↑). W dużym polu,
kiedy magnetyzacje subwarstw są uporządkowane równolegle, większe prawdopodobieństwo
rozpraszania na subwarstwach ferromagnetycznych mają elektrony o spinie skierowanym w
dół (np. ↓ w przypadku uporządkowania ↑↑) w porównaniu z elektronami o spinie
skierowanym w górę (np. ↑). Całkowita rezystancja układu o orientacji równoległej
namagnesowań jest niższa (stan niskiej rezystancji R↑↑) niż w przypadku orientacji
antyrównoległej, w związku z bocznikowaniem elektrycznym przez ulegające mniejszemu
rozpraszaniu elektrony o spinie skierowanym w górę [44].

-31-
-10 -5 0 5 100
1
2
3
4
5
RN
i-FeCu
ee
Ni-Fe
Cu
ee
R↓G
MR
[%]
μ0H [mT]
Rys. 2.16. Model przewodnictwa oraz względna zmiana rezystancji w funkcji pola magnetycznego
w przypadku sprzężenia A-F (na przykładzie układu NiFet=1.8nm /Cud=2.05nm ). Względna zmiana rezystancji ΔR/R = (R↓↑ − R↑↑)/R↑↑ określa wielkość efektu gigantycznej
magnetorezystancji. Powyższe rozważania zakładają, że średnia droga swobodna elektronu
jest dużo większa od grubości każdej subwarstwy, dzięki temu istnieje wysokie
prawdopodobieństwo, że kolejne spinowo-zależne rozpraszania elektronu będą się odbywać
na granicach subwarstw ferromagnetycznych. W przypadku subwarstw znacznie grubszych
niż średnia droga swobodna, układ warstw można traktować jako niezależne od siebie
warstwy ferromagnetyka - w takim przypadku nie występuje efekt GMR, można jedynie
zaobserwować efekt AMR, tak jak w przypadku pojedynczej warstwy ferromagnetyka.
Szczegółowy model GMR oparty na równaniu transportowym Boltzmana w odniesieniu do
gazu elektronowego, zaproponowany przez Camleya i Barnasia [45], pozwala na
wyciągnięcie wniosku, że amplituda ΔR/R efektu GMR maleje monotonicznie ze wzrostem
grubości subwarstw ferromagnetycznych.
Zależność zmiany rezystancji warstw sprzężonych od wzajemnej orientacji wektorów
namagnesowania w tych warstwach można [46] wyrazić wzorem:
gdzie θ1 i θ2 są kątami jakie tworzą wektory namagnesowania z osią x (Rys. 2.14).
W dużym polu (H>HS) wektory namagnesowania będą zorientowane ferromagnetycznie
(θ1 =θ2 =0) i wzór (2-39) zredukuje się do postaci R = R↑↑.
( )[ ]R RR R
= +−
− −↑↑↓↑ ↑↑
21 1 2cos θ θ , (2-39)

-32-
W mniejszych polach, w związku z istnieniem sprzężenia antyferromagnetycznego (JAF<0),
wektory namagnesowania warstw ferromagnetycznych będą dążyć do orientacji
antyrównoległej (θ1 - θ2 =π), co sprowadzi wzór (2-39) do postaci R = R↓↑. Aby
przeanalizować stany pośrednie załóżmy symetrię warstw ferromagnetycznych (θ = θ1 = −θ2).
W takim przypadku równanie (2-39) można przekształcić do postaci:
Z analizy procesu przemagnesowania opisanego w poprzednim rozdziale wynika, że kąt
wektora namagnesowania wiąże się z polem magnetycznym zależnością wynikającą z
równania (2-35):
stąd R(H) będzie miała przebieg paraboliczny w polu −HS ≤H≤HS
gdzie pole nasycające HS zdefiniowane jest wzorem (2-36), ΔR = R↓↑ − R↑↑.
Przykład takiej zależności dla układu wielowarstwowego Fe/Cr przedstawiono na rysunku
(Rys. 2.17).
-3 -2 -1 0 1 2 30
1
2
3
4
5
μ0H [T]-0.5
ΔR
/R[%
]
H/HS
-0.5 0.0
Rys. 2.17. Względna zmiana magnetorezystancji w funkcji pola magnetycznego. Punkty oznaczają
zmierzone wartości względnej magnetorezystacji, linia ciągła - zależność według wzoru (2-42).
( )R R R R= − −↓↑ ↓↑ ↑↑ cos2 θ . (2-40)
cos( )θμ
= − 0
4M tJ
HS
AF, (2-41)
R R RHHS
= −⎛⎝⎜
⎞⎠⎟↓↑ Δ
2
, (2-42)

-33-
W przypadku gdy sprzężenie antyferromagnetyczne nie będzie idealne, tzn. w zerowym polu
θ1−θ2<π, krzywa R(H) ma przebieg odbiegający od zależności parabolicznej.
2.6.1. Oscylacje w układzie wielowarstwowym NiFe/Cu
Efekt GMR zależy od grubości przekładki niemagnetycznej i podobnie jak stała sprzężenia
antyferromagnetycznego JAF ma charakter oscylacyjny względem jej grubości, wykazując
lokalne maksima.
Względne zmiany przyrostu magnetorezystancji, parametru sprzężenia (FAF= 1-Mr/Ms) i pola
nasycającego (HS) z grubością przekładki Cu w układzie Ni83Fe17/Cu przedstawiono na
rysunkach (Rys. 2.18, Rys. 2.19, Rys. 2.20).
0,0 0,5 1,0 1,5 2,0 2,5
0
2
4
6
AF-II
AF-I
bufor Cu 20 nm bez bufora
ΔR/R
[%]
dCu [nm]
Rys. 2.18. Zależność magnetorezystancji od grubości przekładki Cu. Linie wskazują tendencję rozkładu
punktów.

-34-
0,0 0,5 1,0 1,5 2,0 2,50
1AF-II
1-M
I/MS
dCu [nm]
AF-I
Rys. 2.19. Zależność FAF od grubości przekładki Cu. Linie wskazują tendencję rozkładu punktów.
0,0 0,5 1,0 1,5 2,0 2,51
10
100
1000
AF-II
AF-I
HS [O
e]
dCu [nm]
Rys. 2.20. Zależność HS od grubości przekładki Cu. Linie wskazują tendencję rozkładu punktów.
Efekt GMR w drugim maksimum (3.5%) jest mniejszy niż w pierwszym (6.5%), mimo to
bardziej wartościowe z aplikacyjnego punktu widzenia są układy wielowarstwowe o grubości
przekładki z otoczenia drugiego maksimum, ponieważ zmiana magnetorezystancji, w
przypadku sprzężenia AF-II, zachodzi w małym polu nasycającym.

-35-
Pole nasycające HS jest w pierwszym maksimum sprzężenia antyferromagnetycznego (AF I)
około sześciu razy większe niż w drugim (AF II).
Dla zastosowań w czujnikach i głowicach odczytu ważny jest parametr czułości polowej
określającej zdolność reakcji czujnika na pole magnetyczne.
Czułość magnetorezystancyjną próbki można definiować jako stosunek magnetorezystancji
ΔR=(R0-RS)/RS (wyrażony w procentach) do pola HS
gdzie R0 i RS są rezystancjami próbki odpowiednio bez pola magnetycznego i w polu
nasycającym HS. W literaturze technicznej, ze względów aplikacyjnych, można też spotkać
definicję czułości różniczkowej jako nachylenia stycznej do krzywej magnetorezystancji w
funkcji pola magnetycznego:
Inną metodą oszacowania czułości elementu magnetorezystancyjnego jest obliczenie stosunku
magnetooporu ΔR do szerokości połówkowej krzywej magnetorezystancji:
Z wykresu (Rys. 2.21) czułości od grubości przekładki Cu wynika, że większą czułość
polową mają elementy magnetorezystancyjne, które mają mniejszy przyrost
magnetorezystancji, gdyż nasycają się w mniejszym polu magnetycznym. Dlatego grubość
2 nm warstwy Cu jest optymalna dla czujników GMR .
SR RR H
S
S S=
−⋅0 100% , (2-43)
( )S
HR
R RR
S
S= ⋅−∂
∂
0
100% , (2-44)
%10050
050 ⋅
−=
HRRRS
S
S. (2-45)

-36-
0.0 0.5 1.0 1.5 2.0 2.50.00
0.05
0.10
S[%
/kAm
-1]
S [%
/Oe]
dCu [nm]
0.0
0.5
1.0
1.5
Rys. 2.21. Zależność czułości zdefiniowanej przez szerokość połówkową od grubości Cu. Linie wskazują
tendencję rozkładu punktów.
2.7. Układ warstw magnetycznie sprzężonych z jednoosiową anizotropią jednozwrotową typu "zawór spinowy"
Efekty magnetorezystancyjne AMR i GMR są symetryczne względem znaku zewnętrznego
pola magnetycznego. Ponadto wykazują one zazwyczaj mniejszą lub większą histerezę w
okolicy zera pola magnetycznego. W rozdziałach 2.3 i 2.6 wykazano, że ich zależności
polowe mają kształt paraboliczny a więc mają małe nachylenie w okolicy zerowego pola, co
jest niekorzystne z punktu widzenia zastosowania na głowice do odczytu informacji i
detektory pola magnetycznego. Ponadto w zerowym polu spiny są rozporządkowane w
przypadkowy sposób, co może powodować dodatkowe efekty uboczne.
Dla zastosowań na głowice magnetyczne potrzebny jest układ cienkowarstwowy,
wykazujący nieparzystą względem polaryzacji pola magnetycznego dużą zmianę rezystancji
[47], o bardzo dużej czułości (czyli dużej zmianie magnetorezystancji na jednostkę pola) w
okolicy zera pola magnetycznego. Można to uzyskać (Rys. 2.22) stosując następujący układ
warstw typu AF/FP/S/FF czyli: antyferromagnetycznej (AF) warstwy podmagnesowującej
(biased), która wymusza jednoosiową anizotropię jednozwrotową pierwszej warstwy
ferromagnetycznej „zamocowanej” (FP, pinned), przekładki niemagnetycznej (S, spacer) oraz
drugiej warstwy ferromagnetycznej „swobodnej” (FF, free).

-37-
Rys. 2.22. Schemat warstwowy tzw. "zaworu spinowego". Grube strzałki odpowiadają wektorom
namagnesowania poszczególnych warstw.
Grubość przekładki niemagnetycznej jest tak dobrana aby możliwe było uzyskanie słabego
sprzężenia pomiędzy warstwą zamocowaną i swobodną (co odpowiada grubości z drugiego
maksimum A-F). Dla takiego układu warstw sprzężonych pętla histerezy magnetycznej
i magnetorezystancyjnej jest dwustopniowa, ponieważ w polu bliskim zera ulega
przemagnesowaniu warstwa swobodna, a w wysokim polu warstwa zamocowana.
Proces przemagnesowywania takiego układu warstw, przy zaniedbaniu energii anizotropii
warstwy swobodnej i sprzężenia bikwadratowego, związany jest z równaniem
powierzchniowej gęstości energii w postaci [48]:
gdzie:
θ1 i θ2 są kątami jakie tworzy wektor namagnesowania warstwy zamocowanej i swobodnej
względem wektora pola magnetycznego H,
J jest energią sprzężenia wymiennego między warstwą zamocowaną i swobodną,
EEB jest energią jednoosiowej anizotropii jednozwrotowej warstwy zamocowanej.
Człon równania związany z EEB jest odpowiedzialny za złamanie symetrii pętli histerezy
magnetycznej.
Używając w równaniu (2-46) wielkości znormalizowanych:
jJ
EEB= , h
M t HE
HHEB EB
= =μ0 1 1 oraz x
M tM t
= 2 2
1 1
można je zapisać w postaci:
Z warunków na minimum równania (2-47):
E J E EBt M H t M H
= − − −
− −
cos( ) cos
cos cos
θ θ θ
μ θ μ θ1 2 1
1 1 1 2 2 20 0, (2-46)
EE
h hx jEB
= − + − − −( ) cos cos cos( )1 1 2 1 2θ θ θ θ . (2-47)

-38-
∂∂θ
E
10= ,
∂∂θ
E
20= oraz
∂∂θ
∂∂θ
∂∂θ θ
2
12
2
22
2
2 1
2
0E E E
−⎛⎝⎜
⎞⎠⎟ > ,
∂∂θ
2
12 0
E>
można wyznaczyć 5 rozwiązań na kąty θ1 i θ2 [48]: cztery trywialne
θ1 = θ2 = 0, θ1 = θ2 = π, θ1 = 0 i θ2 = π, θ1 = π i θ2 = 0,
oraz jedno nie trywialne:
Powyższe rozwiązania pozwalają na analizę zmiany rezystancji w funkcji pola
magnetycznego.
Zmianę rezystancji sprzężonego układu wielowarstwowego w zależności od położeń
kątowych wektorów namagnesowania w warstwach opisuje wzór (2-39), w przypadku zaworu
spinowego ma on postać:
gdzie: R↑↑ jest rezystancją w przypadku, gdy magnetyzacje warstwy swobodnej i
zamocowanej są do siebie równoległe, ΔR = R↑↓ − R↑↑, przy czym R↑↓ jest rezystancją warstw
gdy wektory namagnesowania dolnej i górnej warstwy ferromagnetycznej są względem siebie
skierowane antyrównolegle.
Korzystając z rozwiązań (2-48) i (2-49) można wyliczyć:
Wykorzystując równania (2-50) i (2-51) można przedstawić ewolucję zależności R(h) dla
różnych wielkości parametrów j (Rys. 2.23) Natomiast z równania (2-48) i (2-49) można
wyliczyć zmianę położeń kątowych wektorów namagnesowania warstwy FP i FF (Rys. 2.24).
W przypadku sprzężenia antyferromagnetycznego (j<0) pomiędzy warstwą swobodną i
zamocowaną, przemagnesowanie warstwy swobodnej odbywa się w dodatnim zakresie
zredukowanego pola h. Natomiast w przypadku sprzężenia ferromagnetycznego zakres pola
( )[ ] ( )⎟⎟⎠
⎞⎜⎜⎝
⎛+
+−−+=
)1(211arccos 22
2222222
1 hxjhxhhxhhjθ , (2-48)
θ2
2 2 2 2 2 2
21 1
2 1=
− + − ++
⎛
⎝⎜
⎞
⎠⎟arccos
( ( ) ) ( )( )
h x j h j hjhx h
. (2-49)
( )[ ]21cos12
θθ −−⎟⎠⎞
⎜⎝⎛ Δ
+= ↑↑
RRR , (2-50)
( )cos( ) ( )
( )θ θ1 2
2 2 2 2 2 2 2
2
12 1
− =+ − + −
+h j h x h x j
hxj h. (2-51)

-39-
odpowiadający przemagnesowaniu warstwy swobodnej przesuwa się w kierunku ujemnych h.
Dla małych dodatnich wartości j warstwa swobodna przemagnesowuje się w polu h2 = −j/x,
warstwa zamocowana natomiast - w polu h1 = −(1−j). Wzrost stałej sprzężenia powoduje
zmniejszanie się zakresu pola, w którym istnieje antyferromagnetyczne uporządkowanie
magnetyzacji (tzn. θ1−θ2=π), aż do wartości krytycznej jcrit = 0.25. Dla jcrit istnieje jedna
wartość pola, dla której warstwy są antyferromagnetycznie sprzężone (Rys. 2.24). Dla j > jcrit
brak jest uporządkowania antyferromagnetycznego pomiędzy warstwą swobodną i
zamocowaną, co powoduje zmniejszanie się różnicy θ 1 − θ 2 (np. krzywa dla j=0.4 na Rys.
2.24) a co za tym idzie, magnetorezystancji.
-1,0 -0,8 -0,6 -0,4 -0,2 0,0h1
j=-0.1
Rez
ysta
ncja
[a.u
.]
Pole h [a.u.]
j=0.2j=0.25
j=0.4
j=0.1
h2
R
R+ΔR
Rys. 2.23. Zmiana rezystancji zaworu spinowego o jednakowych warstwach ferromagnetycznych (x=1) w
funkcji pola magnetycznego, przy różnych wielkościach parametru j.

-40-
-1,0 -0,8 -0,6 -0,4 -0,2 0,0
0
1
2
3
θ1
Kąt
θ1,
θ 2
Pole h
j=0.2j=0.25
j=0.4
θ2
Rys. 2.24. Zależność położenia kątowego wektorów namagnesowania warstwy FP i FF w zależności od
pola h i stałej sprzężenia j.
2.7.1. Zawór spinowy typu GMR
Dieny [49] jako pierwszy opublikował pomiary zaworu spinowego opartego na układzie
wielowarstwowym Ni80Fe20/Cu/ Ni80Fe20/FeMn.
Powtórzyliśmy badania Dieny i dla zaworu spinowego otrzymaliśmy FeMn/Co/Cu/Co
przyrost magnetorezystancji równy ΔR/R=7.55%. Różniczkowa magnetorezystancyjna
czułość polowa (obliczona ze wzoru (2-44)) badanego zaworu spinowego w zakresie niskich
pól wynosi SR=2.25%/kAm-1 (0.18%/Oe). Wysokopolowa część charakterystyki nie jest
wykorzystywana w pracy magnetorezystancyjnego elementu głowicy komputerowej.

-41-
-1.5 -1.0 -0.5 0.0 0.5
h2
Rsat+ΔR
R [a
.u.]
Pole h
Rsat h1
Rys. 2.25. Pętla histerezy magnetorezystancyjnej zaworu spinowego FeMn/Co/Cu/Co. Punkty - dane
doświadczalne, linia ciągła - wartości wynikające ze wzorów (2-45)i (2-50).
Po dopasowaniu znormalizowanych danych doświadczalnych R(H) do analitycznego wzoru
na magnetorezystancję (równanie (2-50)), otrzymano zredukowaną stałą sprzężenia
jJ
E EB= = 0 08. , która dobrze zgadza się z wynikiem otrzymanym z dopasowania przebiegu
namagnesowania od pola magnetycznego M(H). Otrzymane wartości oddziaływań
międzywarstwowych (J i EEB) są typowe dla zaworów spinowych z antyferromagnetyczną
warstwą Fe/Mn i ferromagnetycznymi warstwami Co [50].
Analogiczne pomiary przeprowadzono w przypadku zaworu spinowego o strukturze
FeMn/NiFe/Cu/NiFe. Wykres pętli histerezy magnetycznej przedstawia Rys. 2.26.

-42-
-30 -20 -10 0 10
-0.8
-0.4
0.0
0.4
0.8
μ 0H
[T]
Pole [kA/m]
HEB
-2 -1 0
0.0
0.4
0.8
μ 0H [T
]
Pole [kA/m]
H2
Rys. 2.26. Pętla histerezy magnetycznej zaworu spinowego FeMn/NiFe/Cu/NiFe. Punkty - dane doświadczalne, ciągła linia - dopasowanie numeryczne ze wzoru - (2-52).
Zaznaczono na nim wartość pola sprzężenia wymiennego pomiędzy warstwą
antyferromagnetyczną FeMn a warstwą zamocowaną (HEB =18.3 kAm-1 czyli 228.7 Oe).
Pole przemagnesowania warstwy swobodnej jest bardzo małe i wynosi H2 =0.5 kAm-1
(6.4 Oe).
Do otrzymanych danych doświadczalnych dopasowano pętlę histerezy magnetycznej M(H)
otrzymaną z numerycznego obliczania kątów θ1 i θ2 jakie tworzą wektory namagnesowania
warstwy zamocowanej i swobodnej z kierunkiem pola magnetycznego H. Kąty te obliczano
za pomocą algorytmu minimalizującego funkcję gęstości powierzchniowej energii, będącą
dwuwymiarową funkcją zależną od tych kątów:
gdzie K2 jest stałą anizotropii jednoosiowej warstwy swobodnej NiFe, α2 - kątem jaki tworzy
oś anizotropii warstwy swobodnej z osią x, pozostałe parametry opisane są powyżej.
Otrzymano następujące wyniki dopasowania:
• energia sprzężenia między warstwą swobodną i zamocowaną J = 2.04 ⋅10-6 J/m2 ,
• energia sprzężenia warstwy zamocowanej EEB = 102 ⋅10-6 J/m2,
• zredukowana stała sprzężenia j = 0.02,
E J E EBt M H t M H
K t
= − − −
− −
− −
cos( ) cos
cos cos
cos( )
θ θ θ
μ θ μ θ
θ α
1 2 1
1 1 1 2 2 20 0
2 22
2 2
. (2-52)

-43-
• energia anizotropii warstwy swobodnej K2 = 200 J/m3,
• kąt anizotropii α2=π/2.
W zaworze spinowym FeMn/NiFe/Cu/NiFe otrzymano przyrost magnetorezystancji
ΔR/R=3.58%. Proszę zwrócić uwagę, że zawory spinowe z warstwami ferromagnetycznymi
NiFe charakteryzują się mniejszym przyrostem magnetorezystancji niż warstwy Co [27].
Różniczkowa magnetorezystancyjna czułość polowa w zakresie pola odpowiadającemu
przemagnesowaniu warstwy swobodnej wynosi SR =14.4 %/kAm-1 (1.15%/Oe).
Postępując analogicznie jak poprzednio, do danych doświadczalnych R(H) dopasowano
funkcję analityczną, skąd otrzymano zredukowaną wartość stałej sprzężenia: jJ
E EB= = 0 02. .
Wartość ta jest bardzo dobrze zgodna z wartością obliczoną numerycznie z pętli histerezy
M(H).
-1.5 -1.0 -0.5 0.0 0.5
h2
Rsat+ΔR
R [a
.u.]
Pole h [a.u.]
Rsat h1
Rys. 2.27. Pętla histerezy magnetorezystancyjnej zaworu spinowego FeMn/NiFe/Cu/NiFe. Punkty - dane
doświadczalne, linia ciągła - wartości wynikające ze wzorów (2-48) i (2-50).
Z porównania stałych sprzężenia obu zaworów spinowych (z warstwami NiFe lub Co) widać,
że sprzężenie ferromagnetyczne pomiędzy warstwą zamocowaną i swobodną jest słabsze w
zaworze z warstwami NiFe (j=0.02) niż w zaworze z warstwami Co (j=0.08). Dlatego
przemagnesowanie warstwy swobodnej dla zaworu z NiFe zachodzi w mniejszym polu
(H2=0.5 kAm-1), niż w przypadku zaworu z Co (H2=1.04 kAm-1). Zaobserwowane w obu
zaworach spinowych sprzężenie ferromagnetyczne jest na tyle małe, że nie niszczy
uporządkowania antyferromagnetycznego pomiędzy warstwą FF i FP (j < jcrit = 0.25).

-44-
Opisane przykładowo problemy fizyczne magnetycznych sprzężeń międzywarstwowych są
podstawą inżynierii spinowej struktur cienkowarstwowych, jakie są stosowane w twardym
dysku, głowicy odczytowej twardego dysku i w komórkach magnetycznych pamięci RAM.
2.8. Magnetyczne złącze tunelowe
Magnetyczne złącze tunelowe (Magnetic Tunnel Junction) jest układem w którym przekładka
niemagnetyczna rozdzielająca warstwy FF i FP jest izolatorem. Warstwa izolatora jest na tyle
cienka, że elektrony mogą tunelować przez barierę w przypadku przyłożenia napięcia między
elektrodami. W złączach MTJ prąd tunelowy bardzo silnie zależy od wzajemnej orientacji
magnetyzacji warstw ferromagnetycznych, która jest zmieniana pod wpływem zewnętrznego
pola magnetycznego.
Do zrozumienia zjawiska spinowo zależnego tunelowania pomocne jest skorzystanie z funkcji
gęstości stanów i polaryzacji spinowej w ferromagnetyku. W ferromagnetycznych metalach
3d (Fe, Co, Ni) funkcje gęstości stanów na poziomie Fermiego (EF) dla spinów skierowanych
do góry (ρ↑) i w dół (ρ↓) różnią się. Ponadto występuje przesunięcie pasm energii dla spinów
skierowanych w górę i w dół, co prowadzi do rozszczepienia spinowego pasm elektronowych
o energię Es (rozszczepienie Stonera).
Spinowa polaryzacja ferromagnetyka na poziomie Fermiego (EF) jest zdefiniowana jako:
gdzie ρ↑(EF) i ρ↓(EF) są gęstościami stanów na poziomie Fermiego, odpowiednio dla spinów
większościowych i mniejszościowych (Rys. 2.28). Ze wzoru (2-53) wynika, że polaryzacja
spinowa może być dodatnia lub ujemna, jednakże większość ferromagnetycznych metali
przejściowych stosowanych w złączach tunelowych ma polaryzację dodatnią [51]. Powoduje
to, że spiny o orientacji do góry są spinami większościowymi.
Jak już zostało wcześniej napisane, magnetyczne złącze tunelowe w swojej podstawowej
formie składa się z dwóch ferromagnetycznych elektrod rozdzielonych cienką,
niemagnetyczną przekładką izolatora. Prąd przepływający pomiędzy elektrodami można
rozważać, podobnie jak w przypadku efektu GMR, jako sumę dwóch kanałów prądowych o
spinach skierowanych w górę i w dół [52]. Kanały prądowe nie są sobie równe, gdyż gęstości
stanów w elektrodach nie są równe dla przeciwnie zorientowanych spinów. Ponadto stosunek
)()()()()(
FF
FFF EE
EEEP↓↑
↓↑
+−
=ρρρρ , (2-53)

-45-
wielkości tych dwóch prądów może być zmieniany poprzez zmianę orientacji magnetyzacji
elektrod zewnętrznym polem magnetycznym.
W związku z powyższym prąd tunelowy jest rozważany dla równoległego i antyrównoległego
stanu magnetyzacji w elektrodach. W przypadku stanu równoległego, elektrony o spinach
większościowych skierowanych w górę, w pierwszej elektrodzie, tunelują do nieobsadzonych
stanów większościowych w drugiej elektrodzie. Odpowiednio elektrony o spinach
mniejszościowych tunelują do nieobsadzonych stanów mniejszościowych (Rys. 2.28a).
Całkowity prąd dla konfiguracji równoległej (IP), przy założeniu proporcjonalności prądów w
kanałach spinowych do gęstości stanów ferromagnetycznych elektrod na poziomie Fermiego,
można zapisać:
gdzie:
)(),( FBFT EE ↑↑ ρρ są gęstościami stanów dla spinów większościowych odpowiednio w górnej
i dolnej elektrodzie,
)(),( FBFT EE ↓↓ ρρ są gęstościami stanów dla spinów mniejszościowych odpowiednio w górnej
i dolnej elektrodzie.
Rys. 2.28. Schematyczne przedstawienie tunelowania elektronów w magnetycznym złączu tunelowym w
przypadku równoległej (a) i antyrównoległej (b) orientacji namagnesowania elektrod ferromagnetycznych, w oparciu o funkcję gęstości stanów ferromagnetyka.
)()()()( FBFTFBFTP EEEEI ↓↓↑↑ +∝ ρρρρ , (2-54)
(a)
(b)

-46-
Przy zmianie konfiguracji namagnesowania elektrod na antyrównoległą następuje zmiana
pomiędzy spinami mniejszościowymi i większościowymi w górnej elektrodzie. Spiny
większościowe skierowane w górę stają się spinami większościowymi skierowanymi w dół.
Spiny mniejszościowe skierowane w dół stają się spinami mniejszościowymi skierowanymi w
górę (Rys. 2.28b). Dla konfiguracji antyrównoległej całkowity prąd (IAP) można zapisać:
Ta zamiana pasm spinowych dla konfiguracji antyrównoległej powoduje, że prąd IAP jest
mniejszy niż IP ponieważ ↓↓↑↑ > BTBT ρρρρ .
Przy użyciu prądów dla konfiguracji równoległej (IP) i antyrównoległej (IAP) wartość TMR
dla magnetycznego złącza tunelowego można zdefiniować jako [75]:
gdzie PT i PB są odpowiednio polaryzacjami spinowymi elektrody górnej i dolnej.
Z równania (2-56) widać, że wartość TMR (Tunneling Magnetoresistance) jest określona
przez różnice w funkcji gęstości stanów dla spinów skierowanych w górę i w dół. Ten
uproszczony model zaproponował Jullier [53] zakładając, że spin elektronu jest zachowany w
procesie tunelowania i w związku z tym można rozważać dwa osobne procesy dla spinów
skierowanych w górę i w dół.
W tym modelu efekt TMR przejawia się jako wewnętrzna właściwość ferromagnetycznych
elektrod w złączu, bez rozważania własności bariery. Ten prosty model dość dobrze opisuje
wyniki eksperymentalne TMR dla niskiego napięcia i niskich temperatur. W przypadku
wzrostu napięcia lub temperatury wartość TMR znacząco spada [54,55,56].
2.8.1. Złącze tunelowe typu zawór spinowy Układy typu zawór spinowy (spin-valve SV) są strukturami wielowarstwowymi stosowanymi
powszechnie w układach elektroniki spinowej wykorzystujących efekt GMR i TMR, takich
jak: czujniki pola magnetycznego [57], głowice odczytu dysków twardych [58,59], elementy
pamięci MRAM [59,60,61] i reprogramowalne układy logiki spinowej [62,63]. W chwili
obecnej ze względu na bardzo duży przyrost tunelowej magnetorezystancji (TMR), który
)()()()( FBFTFBFTAP EEEEI ↑↓↓↑ +∝ ρρρρ . (2-55)
BT
BT
BTBT
BBBTBTBT
AP
APP
PPPP
IIITMR
−=
++−+
=−
=↑↓↓↑
↑↓↓↑↓↓↓↑
12)()(
ρρρρρρρρρρρρ . (2-56)

-47-
osiąga w temperaturze pokojowej 604 % [64] dla pojedynczego złącza a 1056% dla
podwójnego [65] (stosując barierę tunelową z krystalicznego MgO), buduje się wymienione
urządzenia elektroniki spinowej wykorzystujące przede wszystkim efekt tunelowania.
Pamięci MRAM, ze względu na swoje niewątpliwe zalety takie jak: nieulotność, szybkość
działania, nieograniczona wytrzymałość na zapis i odczyt oraz odporność na promieniowanie
radiacyjne, są przedmiotem intensywnych badań [66].
W rozdziale tym zostanie omówione magnetyczne złącze tunelowe typu zawór spinowy i jego
podstawowe zastosowania.
Zawór spinowy stanowią dwie warstw ferromagnetyczne, z których jedna przemagnesowuje
się w małym (bliskim zera) a druga w dużym polu magnetycznym [67]. Przemagnesowanie
warstwy w dużym polu wymaga zastosowania warstwy magnetycznie twardej lub
zastosowania dodatkowo warstwy antyferromagnetyka. Warstwa antyferromagnetyczna,
poprzez sprzężenie z warstwą ferromagnetyczną, zapewnia jej przemagnesowanie w dużym
polu.
Na rysunku (Rys. 2.29) przedstawiona jest schematycznie budowa najczęściej stosowanego
zaworu spinowego. AF (antiferromagnetic) oznacza warstwę antyferromagnetyczną, FP
(ferromagnetic pinned) warstwę ferromagnetyczną zamocowaną, S (spacer) przekładkę
nieferromagnetyczną oraz FF (ferromagnetic free) warstwę ferromagnetyczną swobodną.
Rys. 2.29. Schemat zaworu spinowego, gdzie: AF – warstwa antyferromagnetyczna, FP – warstwa (elektroda) ferromagnetyczna zamocowana, S – przekładka nieferromagnetyczna, FF – warstwa
(elektroda) ferromagnetyczna swobodna.
Sprzężenie warstwy AF z warstwą FP wymusza jednoosiową anizotropię jednozwrotową
warstwy FP dzięki kontaktowej energii wymiennej spinów na styku AF-FP (exchange bias
energy). Sytuacja ta zachodzi tylko wtedy jeśli powierzchniowa energia anizotropii
magnetokrystalicznej antyferromagnetyka (KAFtAF) jest większa od powierzchniowej energii
wymiennej (interfacial exchange bias JEXB) między warstwą AF i FP (KAFtAF>JEXB)[68].
Ponadto warstwy FP i FF są ze sobą sprzężone wymiennie poprzez cienką przekładkę S.
Wielkość i rodzaj sprzężenia międzywarstwowego FP-S-FF zależy od tego czy przekładka S
jest metaliczna [69,70], czy jest izolatorem [71], i maleje ze wzrostem jej grubości [72]. Dla

-48-
tak sprzężonych warstw pętla histerezy magnetycznej jest dwustopniowa. W polu bliskim
zeru ulega przemagnesowaniu warstwa swobodna FF (która dzięki odpowiednio grubej
przekładce S jest odsprzężona od warstwy FP), a w dużym polu warstwa zamocowana FP.
Układy typu zawór spinowy wykazują różną rezystancję w zależności od wzajemnej
orientacji wektorów namagnesowania warstw FP i FF – dla orientacji równoległej mamy małą
rezystancję dla antyrównoległej dużą. Zatem zmianie konfiguracji namagnesowań z
ustawienia równoległego do antyrównoległego towarzyszy wzrost oporu elektrycznego. W
przypadku przekładki metalicznej (w praktycznych rozwiązaniach najczęściej stosowana Cu)
względny przyrost magnetorezystancji wynosi od kilku do około 20% [58,73]. Tutaj,
zjawisko magnetorezystancji (jak już wspomniano w rozdziale 2.6) związane jest z zależnym
od kierunku spinu rozpraszaniem elektronów na interfejsach między warstwami
ferromagnetycznymi a przekładką [74]. Dla cienkiej przekładki izolatora mamy do czynienia
ze zjawiskiem tunelowej magnetorezystancji TMR (Tunnel Magnetoresistance) [75]. W tym
przypadku przepływ prądu bazuje na spinowo zależnym kwantowym efekcie tunelowania
[71] poprzez cienką barierę izolatora: amorficznego Al-O [76], mono- [77] lub
polikrystalicznego MgO [78]. W ostatnim roku kilkakrotnie ustanawiano kolejne rekordy
przyrostu tunelowej magnetorezystancji: 180% dla złącza epitaksjalnego
Fe(001)/MgO(001)/Fe(001) [77], 220% dla polikrystalicznego CoFe/MgO/CoFe [78], oraz
230% [79] i 604% [65] dla złącza z amorficznymi elektrodami CoFeB/MgO/CoFeB.
2.8.2. Sprzężenia magnetyczne w złączu tunelowym
Jak już zostało wspomniane, aby obserwować zmianę magnetorezystancji tunelowej w złączu,
kierunki magnetyzacji elektrod ferromagnetycznych muszą osiągać stan równoległy i
antyrównoległy. Aby osiągnąć te dwa stany, elektrody muszą się przełączać (zmieniać zwrot
namagnesowania) w różnych zewnętrznych polach.
Na rysunku (Rys. 2.30) przedstawione są schematycznie pętle histerezy namagnesowania
(Rys. 2.30a) oraz odpowiadające im pętle zmian magnetorezystancji (Rys. 2.30b) dla złącza
tunelowego typu zawór spinowy. Przy małych wartościach pola Hs1 i Hs2 następuje
przełączanie warstwy swobodnej. Warstwa zamocowana, która jest podmagnesowana przez
warstwę antyferromagnetyka, przełącza się w znacznie większych polach oznaczonych na
rysunku Hb1 i Hb2.
Od wartości pól przełączeń zależy wartość zdefiniowanych pól HEXB oraz HS:

-49-
Rys. 2.30. Magnetyczna (a) i magnetorezystancyjna (b) pętla histerezy dla złącza tunelowego typu zawór spinowy. Hb1 i Hb2 – pola przełączania warstwy FP, Hs1 i Hs2 – pola przełączania warstwy FF.
Prąd płynący prostopadle do płaszczyzny układu zależy od wzajemnej orientacji
namagnesowania dwóch ferromagnetycznych warstw osiągając maksymalną wartość
(minimalna rezystancja) dla stanu równoległego i minimalną (maksymalna rezystancja) dla
stanu antyrównoległego. W praktycznych zastosowaniach, na przykład do realizacji operacji
logicznych w pamięciach MRAM lub odpowiednio dużego sygnału napięciowego głowicy
odczytowej twardego dysku, wykorzystuje się przełączanie warstwy swobodnej. Jak z tego
wynika powinniśmy zadbać o duże pole exchange bias, bo wtedy warstwa FP trwale
utrzymuje konfigurację antyrównoległą. Dodatkowo powinniśmy dążyć do zerowego pola HS,
gdyż takie same wartości pola, ale o przeciwnym znaku, będą przełączały warstwę swobodną.
Opisana wyżej struktura jest charakterystyczna dla złącza o strukturze bottom (dolny). W
takim przypadku warstwa antyferromagnetyka jest pod warstwą zamocowaną. W strukturze
top (górny) antyferromagnetyk leży nad warstwą zamocowaną. W zastosowaniach
praktycznych, w szczególności w pamięciach operacyjnych MRAM, komórki SV-MTJ (spin-
valve MTJ) mają strukturę typu bottom.
212 bb
EXBHH
H+
= , 2
12 ssS
HHH
+= . (2-57)
(a)
(b)

-50-
2.8.3. Sprzężenie międzywarstwowe warstwa swobodna/przekładka/warstwa zamocowana
W pomiarach magnetycznych i magnetorezystancyjnych układów typu zawór spinowy
obserwuje się przesunięcie pętli (minor loop) górnej elektrody FF o pole Hs (Rys. 2.30). Jest
to tzw. pole offsetu, które powinno być jak najmniejsze. Przesunięcie pętli jest spowodowane
ferromagnetycznym sprzężeniem międzywarstwowym pomiędzy warstwami: zamocowaną
FP (ferronagnetic pinned) i swobodną FF (ferromagnetic free). Jest to sprzężenie dipolowe
wywołane przez nierówności powierzchni (Rys. 2.31).
Rys. 2.31. Sprzężenia dipolowe pomiędzy warstwami FP i FF w złączu tunelowym. MP, MF – nasycenie
magnetyzacji warstwy zamocowanej i swobodnej.
Sprzężenie to nazywane orange peel (skórka pomarańczy) oryginalnie zaproponowane przez
Nèela [80] wynika z szorstkości interfejsów pomiędzy warstwami FP/S/FF. W modelu Nèela
założony jest sinusoidalny rozkład szorstkości na interfejsach oraz nieskończona grubość
warstw ferromagnetycznych. Model został uogólniony przez Koolsa [72] na zależność od
grubości warstw ferromagnetycznych.
gdzie:
tF – grubość warstwy ferromagnetycznej swobodnej FF (ferromagnetic free),
tS – grubość przekładki niemagnetycznej S (spacer),
tP – grubość warstwy ferromagnetycznej zamocowanej FP (ferromagnetic pinned),
h – amplituda szorstkości na interfejsach,
λ – period pofalowania interfejsu.
Rysunek (Rys. 2.32) przedstawia schematycznie strukturę złącza tunelowego wraz z
zaznaczonymi parametrami charakteryzującymi układ.
⎟⎟⎠
⎞⎜⎜⎝
⎛ −
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛ −×
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛ −=
λπ
λπ
λπ
λπ SPF
F
PS
ttttMhH 22exp 22exp-1 22exp-1
2
22
, (2-58)
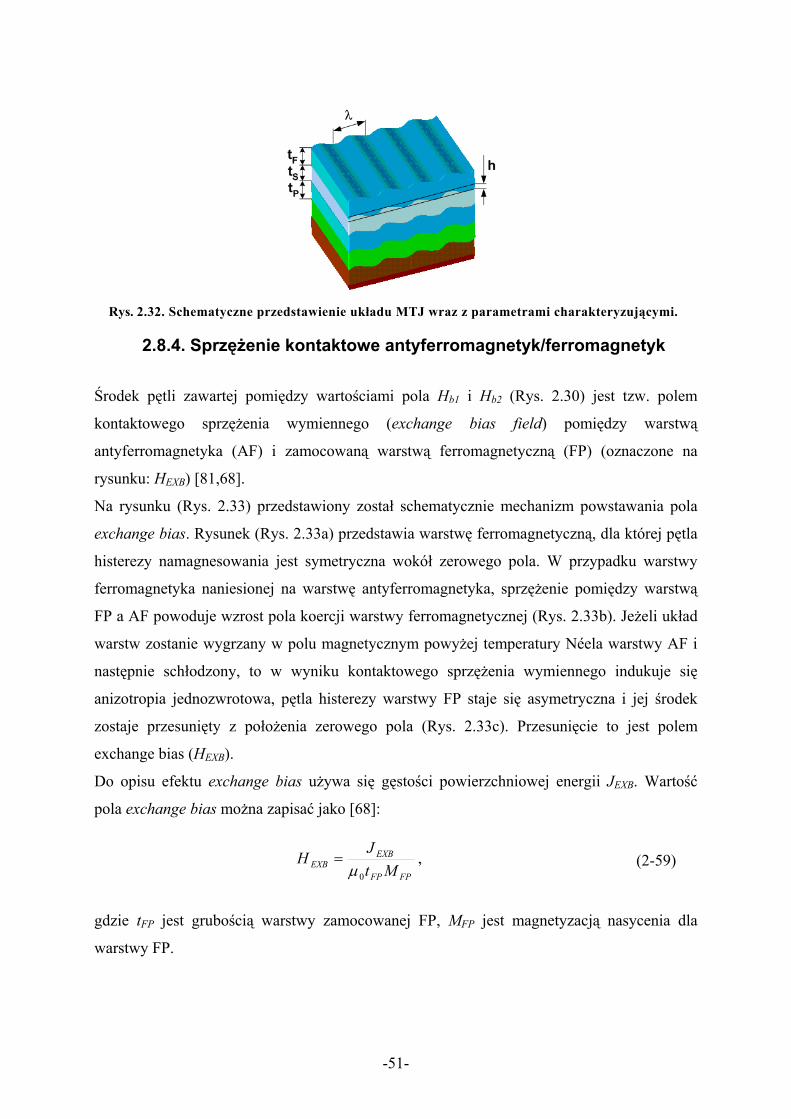
-51-
Rys. 2.32. Schematyczne przedstawienie układu MTJ wraz z parametrami charakteryzującymi.
2.8.4. Sprzężenie kontaktowe antyferromagnetyk/ferromagnetyk
Środek pętli zawartej pomiędzy wartościami pola Hb1 i Hb2 (Rys. 2.30) jest tzw. polem
kontaktowego sprzężenia wymiennego (exchange bias field) pomiędzy warstwą
antyferromagnetyka (AF) i zamocowaną warstwą ferromagnetyczną (FP) (oznaczone na
rysunku: HEXB) [81,68].
Na rysunku (Rys. 2.33) przedstawiony został schematycznie mechanizm powstawania pola
exchange bias. Rysunek (Rys. 2.33a) przedstawia warstwę ferromagnetyczną, dla której pętla
histerezy namagnesowania jest symetryczna wokół zerowego pola. W przypadku warstwy
ferromagnetyka naniesionej na warstwę antyferromagnetyka, sprzężenie pomiędzy warstwą
FP a AF powoduje wzrost pola koercji warstwy ferromagnetycznej (Rys. 2.33b). Jeżeli układ
warstw zostanie wygrzany w polu magnetycznym powyżej temperatury Néela warstwy AF i
następnie schłodzony, to w wyniku kontaktowego sprzężenia wymiennego indukuje się
anizotropia jednozwrotowa, pętla histerezy warstwy FP staje się asymetryczna i jej środek
zostaje przesunięty z położenia zerowego pola (Rys. 2.33c). Przesunięcie to jest polem
exchange bias (HEXB).
Do opisu efektu exchange bias używa się gęstości powierzchniowej energii JEXB. Wartość
pola exchange bias można zapisać jako [68]:
gdzie tFP jest grubością warstwy zamocowanej FP, MFP jest magnetyzacją nasycenia dla
warstwy FP.
FPFP
EXBEXB Mt
JH0μ
= , (2-59)

-52-
Rys. 2.33. Schemat mechanizmu exchange bias wraz z odpowiadającymi pętlami magnetycznymi.
Ferromagnetyczna warstwa niepodmagnesowana F (a), warstwa FP z warstwą antyferromagnetyczną AF przed wygrzaniem (b), warstwa FP podmagnesowana warstwą AF po wygrzaniu i schłodzeniu w
zewnętrznym polu (c). Rysunek (Rys. 2.34) przedstawia pomiary pętli TMR dla próbek o strukturze podłoże/Cu
25nm/IrMn 12nm/CoFe t/Al-O 1.4nm/NiFe 3nm/Ta 5nm/Cu 30nm/Ta 3nm/Au 25nm dla
dwóch różnych grubości warstwy CoFe 3 i 6 nm. Poniżej (Rys. 2.34a i Rys. 2.34b)
przedstawione są pętle zmierzone dla próbek odpowiednio przed wygrzaniem i po wygrzaniu
w temperaturze 275 ºC, w polu magnetycznym 80 kA/m. Przed wygrzaniem pętle są
symetryczne względem zerowego pola. Wygrzanie w polu magnetycznym powoduje
powstanie sprzężenia pomiędzy warstwami AF-FP, co uwidacznia się w przesunięciu pętli i
jej niesymetrycznym położeniu względem pola H = 0.
-100 -50 0 50 1000
4
8
12
16 1 TMR = 13.4%; t CoFe 3nm 2 TMR = 10.8%; t CoFe 6nm
TMR
[%]
H [kA/m]-100 -50 0 50 100
0
10
20
30
40
50 1 TMR = 51.7% 2 TMR = 43.9%
TMR
[%]
H [kA/m]
Rys. 2.34. Wpływ wygrzewania na sprzężenie exchange bias na przykładzie zaworów spinowych o strukturze podłoże/Cu 25nm/IrMn 12nm/CoFe t/Al-O 1.4nm/NiFe 3nm/Ta 5nm/Cu 30nm/Ta 3nm/Au
25nm z warstwą zamocowaną CoFe 3 nm i 6 nm. Próbki przed wygrzaniem (a) i po wygrzaniu (b).
Wygrzewaniem i schładzaniem w polu magnetycznym możemy narzucić, wielokrotnie i
dowolnie, wybrany kierunek anizotropii, wymuszony polem magnetycznym. Świadczy to o
tym, że zastosowana temperatura wygrzewania nie powoduje zmian anizotropii
(b) (a) (c)
(b) (a)

-53-
magnetokrystalicznej w warstwie antyferromagnetycznej (gdyby do takich zmian doszło,
proces indukowania się jednoosiowej-jednozwrotowej anizotropii AF-FP nie byłby
odwracalny) [82].
Mikrostrukturalne własności warstwy antyferromagnetycznej – tekstura i wielkość
krystalitów mają wpływ na wartość pola HEXB [83].
[8] E. C. Stoner, E. P. Wohlfahrt, A Mechanism of Magnetic Hysteresis in Heterogeneous
Alloys, Phil. Trans. A240 (1948) 599
[9] J. A. Osborn, Demagnetizing Factors of the General Ellipsoid, Phys. Rev. 67 (1945) 351
[10] J.P.Jan, Galvanomagnetic and Thermomagnetic Effects in Metals, Solid State Physics,
vol.5, Eds/ F.Seitz, D.Turnbull, Academic Press Inc. Publishers, N.Y. 1957
[11] N. F. Mott, Electrons in transition metals, Adv. Phys 13 (1964) 325
[12] T. R. McGuire, R. I. Potter, Anisotropy magnetoresistance in ferromagnetic 3d-alloys,
IEEE Trans. MAG-11 (1975) 1018
[13] V. A. Marsocci, Effect of Spin-Orbit Interaction on the Magnetoresistance of
Single-Crystal Nickel and Nickel-Iron Thin Films, Phys Rev. 137 (1965) A1842
[14] Z. Szczaniecki, F. Stobiecki, R. Gontarz, H. Ratajczak, Effect of narrow stripe cutting of
a thin ferromagnetic film on its easy axis orientation, phys. stat. sol. A 18 (1973) 1107
[15] T. Stobiecki, A. Paja, Angular dependence of magnetoresistance in thin Ni-Fe films, Acta
Phys.Polon., A41 (1972) 343
[16] A. Chrząstowski, T. Stobiecki, H. Jankowski, A magnetoresistance metod of measuring
HK and HC of thin magnetic films by a four-point resistance probe, Acta Phys. Polon. A43
(1973) 411
[17] T. Stobiecki, J. Spalek, H. Jankowski, Influence of angular dispersion of magnetization
on magnetoresistance in ferromagnetic thin films, Acta Phys. Polon., A41 (1972) 657
[18] R. C. O'Handley, The Hall Effects and Its Applications, Ed. C.L.Chien, C.R.Westgate,
Plenum (1979) 417
[19] C. M. Hurd, Hall Effect in Metals and Alloys, Plenum, New York (1972)
[20] L. Berger, Side-Jump Mechanism for the Hall Effect of Ferromagnets, Phys. Rev. B, 2
(1970) 4559
[21] L. Berger, G. Bergmann, The Hall Effects and Its Applications, Ed. C.L.Chien,
C.R.Westgate, Plenum (1979) 55

-54-
[22] A. Fert, A. Hamzič, The Hall Effects and Its Applications, Ed. C.L.Chien, C.R.Westgate,
Plenum (1979) 77
[23] T. Stobiecki, K. Kowalski, Hall Effect in Amorphous GdFe, GdCo and GdCoMo Films, IEEE
Trans. on Magn., Mag-20 (1984) 1344
[24] S. P. McAlister, C. M. Hurd, Hall effect in 3d‐transition metals and alloys, J. Appl.
Phys. 50 (1979) 7526
[25] P. Grünberg et al., Layered Magnetic Structures: Evidence for Antiferromagnetic
Coupling of Fe Layers across Cr Interlayers, Phys Rev. Lett. 57 (1986) 2442
[26] M. N. Baibich, J. M. Broto, A. Fert, F. Nguyen Van Dau, F. Petroff, P. Etienne,
G.Creuzet, A.Friedrich, J.Chazelas, Giant Magnetoresistance of (001)Fe/(001)Cr Magnetic
Superlattices, Phys. Rev. Lett. 61 (1988) 2472
[27] S. P. P. Parkin, N. More, K. P. Roche, Oscillations in exchange coupling and
magnetoresistance in metallic superlattice structures: Co/Ru, Co/Cr, and Fe/Cr, Phys. Rev.
Lett. 64 2304 (1990)
[28] S. P. P. Parkin, Giant Magnetoresistance in Magnetic Nanostructures, Annual Rev.
Mater. Sci. 25 (1995), 357
[29] K. B. Hathaway, Ultrathin Magnetic Structures II, Ed. B.Heinrich, Springer-Verlag
(Berlin 1994), 82
[30] M.A.Ruderman, C.Kittel, Indirect Exchange Coupling of Nuclear Magnetic Moments by
Conduction Electrons, Phys Rev. 96 (1954), 99
[31] T. Kasuya, A Theory of Metallic Ferro- and Antiferromagnetism on Zener's Model,
Progr. Theoret. Phys. (Japan) 16 (1956), 45
[32] K. Yosida, Magnetic Properties of Cu-Mn Alloys, Phys. Rev. 106 (1957), 893
[33] S. Baltensperger, J. S. Helman, Ruderman–Kittel coupling between ferromagnets
separated by a nonmagnetic layer, Appl. Phys. Lett. 57 (1990), 2954
[34] A. Fert, B. Bruno, Ultrathin Magnetic Structures II, Ed. B.Heinrich, Springer-Verlag
(Berlin 1994), 82
[35] T. Johnson, S. T. Purcell, N. W. E. McGee, R. Coehoorn, J.aan de Stegge, W.Hoving,
Structural dependence of the oscillatory exchange interaction across Cu layers, Phys. Rev.
Lett. 68 (1992), 2688
[36] B. Dieny, J. P. Gavigan, Minimum energy versus metastable magnetization processes in
antiferromagnetically coupled ferromagnetic multilayers, J. Phys.:Condens.Matter 2 (1990)
187

-55-
[37] W. Schmidt, Influence of antiferromagnetic interlayer exchange interactions in a double
ferromagnetic film on the hysteresis curve, J. Magn. Magn. Mater. 84 (1990) 119
[38] K. Pettiti, S. Gider, S. S. P. Parkin, M. B. Salamon, Strong biquadratic coupling and
antiferromagnetic-ferromagnetic crossover in NiFe/Cu multilayers, Phys.Rev. B, 56 (1997)
7819
[39] F. Stobiecki, T. Luciński, C. Loch, J. Dubowik, B. Szymański, M. Urbaniak and K. Roll,
Temperature Dependence of the Magnetisation Reversal of Permalloy/Copper Multilayers
with Antiferromagnetic Coupling, J. Magn. Soc. Japan 23 (1999) 176
[40] B. Dieny, J. P. Gavigan and J. P. Rebouillat, Magnetisation processes, hysteresis and
finite-size effects in model multilayer systems of cubic or uniaxial anisotropy with
antiferromagnetic coupling between adjacent ferromagnetic layers, J. Phys.: Condens. Matter
2 (1990) 159
[41] E. N. Mitchell, H. B. Haukaas, H. D. Bale, J. B. Streeper, Compositional and Thickness
Dependence of the Ferromagnetic Anisotropy in Resistance of Iron‐Nickel Films, J.Appl.
Phys. 35 (1964) 2604
[42] S. S. P. Parkin, R. Bhadra, K. P. Roche, Oscillatory magnetic exchange coupling through
thin copper layers, Phys. Rev. Lett. 66 (1991) 2152
[43] N. F. Mott, Electrons in transition metals, Adv.Phys. 13 (1964) 325
[44] J. Mathon, Exchange interactions and giant magnetoresistance in magnetic multilayers,
Conteporary Phys 32 (1991) 143
[45] R. E. Camley, J. Barnaś, Theory of giant magnetoresistance effects in magnetic layered
structures with antiferromagnetic coupling, Phys. Rev. Lett. 63 (1989) 664
[46] Th. G. S. M. Rijks, R. Coehoorn, W. Jonge, Magnetic Ultrathin Films, Ed. B.Jonker et
al., MRS Proc. 313, Pitsburgh, PA (1993) 283
[47] C. Tsang, R. Fontana, T. Lin, D. Heim, V. Speriosu, B. Gurney, M. Williams, Design,
Fabrication & Testing of Spin-Valve Read Heads for High DensityRecording, IEEE Trans.
Magn. 30 (1994) 3801
[48] Th. G. S. M. Rijks, R. Coehoorn, J. T. F. Daemen, W. J. M. de Jonge, Interplay between
exchange biasing and interlayer exchange coupling in Ni80Fe20/Cu/Ni80Fe20/Fe50Mn50 layered
systems, J.Appl.Phys., 76-2, (1994) 1092
[49] B. Dieny, V. S. Speriosu, Ba.A. Gurney, S. S. P. Parkin, D. R. Wilhoit, K. P. Roche, S.
Metin, D. T. Peterson, J. S. Nadimi, Spin-Valve Effect in Soft Ferromagnetic Sandwiches, J.
Magn. Magn. Mat. 93 (1994) 101

-56-
[50] G. Choe, A. Tsoukatos, S. Gupta, Growth of Giant Magnetoresistive Spin Valves with
Strong Exchange Bias field, IEEE Trans. Magn. 34 (1998) 867
[51] E. Y. Tsymbal, O. N. Mryasov, P. R. LeClair, Spin-dependent tunnelling in magnetic
tunnel junctions, Journal of Physics-Condensed Matter 15 (2003) R109
[52] N. F. Mott, The Electrical Conductivity of Transition Metals, Proceedings of the Royal
Society of London. Series A, Mathematical and Physical Sciences 153 (1936) 699
[53] M. Jullier, Tunnelling between ferromagnetic films, Phys. Lett., 54A, (1975) 225
[54] J. S. Moodera, L. R. Kinder, Ferromagnetic–insulator–ferromagnetic tunneling: Spin-
dependent tunneling and large magnetoresistance in trilayer junctions, J. Appl. Phys. 79
(1996) 4724
[55] L. Yu, X. W. Li, X. Gang, R. A. Altman, W. J. Gallagher, A. Marley, K. Roche, S.
Parkin, Bias voltage and temperature dependence of magnetotunneling effect, J. Appl. Phys.
83 (1998) 6515
[56] S. J. Ahn, T. Kato, H. Kubota, Y. Ando, T. Miyazaki, Bias-voltage dependence of
magnetoresistance in magnetic tunnel junctions grown on Al2O3 (0001) substrates, Appl.
Phys. Lett. 86 (2005) 102506
[57] D. Lacour, H. Jaffrès, F. Nguyen Van Dau, F. Petroff, A. Vaurès, J. Humbert, Field
sensing using the magnetoresistance of IrMn exchange-biased tunnel junctions, J. Appl. Phys.
91 (2002) 4655
[58] A. Dietzel, Hard Disk Drives, in Nanoelectronics and Information Technology,
Advanced Electronic Materials and Novel Devices, edited by R. Wasser (Wiley-VCH,
Weinheim, (2003) 617
[59] Y. Wu, Nano Spintronics for Data Storage, in Encyclopedia of Nanoscience and
Nanotechnology, edited by H. S. Nalwa (American Scientific Publishers, Los Angeles 2003)
Vol. X, 1
[60] W. Reohr, H. Honigschmid, R. Robertazzi, D. Gogl, F. Pesavento, S. Lammers, K.
Lewis, C. Arndt, Y. Lu, H. Viehmann, R. Scheuerlein, L. Wang, P. Trouilloud, S. Parkin, W.
Gallagher, and G. Mueller, Memories of tomorrow, IEEE Circuits Devices Magazine 18
(2002) 17
[61] J. M. Daughton, Magnetoresistive Memory Technology, Thin Solid Films 216 (1992) 162
[62] G. Reiss, H. Brückl, D. Meyners, R. Richter, and J. Wecker, Arrays of magnetic
tunnelling junctions for field programmable logic gates, J. Magn. Magn. Mater. 272-276
(2004) E1497

-57-
[63] R. Richter, H. Boeve, L. Bar, J. Bangert, G. Rupp, G. Reiss, J. Wecker, Field
programmable spin-logic realized with tunnelling- magnetoresistance devices, Solid-State
Electronics 46 (2002) 639
[64] S. Ikeda, J. Hayakawa, Y. Ashizawa, Y. M. Lee, K. Miura, H. Hasegawa, M. Tsunoda, F.
Matsukura, H. Ohno, Tunnel magnetoresistance of 604% at 300 K by suppression of Ta
diffusion in CoFeB/MgO/CoFeB pseudo-spin-valves annealed at high temperature, Appl.
Phys. Lett. 93 (2008) 082508
[65] L. Jiang, H. Naganuma, M. Oogane, and Y. Ando, Large Tunnel Magnetoresistance of
1056% at Room Temperature in MgO Based Double Barrier Magnetic Tunnel Junction,
Appl. Phys. Express 2 (2009) 083002
[66] R. P. Cowburn, The Future of Universal Memory, Materials Today, July/August (2003)
32.
[67] B. Dieny, V. S. Speriosu, B. A. Gurney, S. S. P. Parkin, D. R. Whilhoit, K. P. Roche, et
al., Spin-valve effect in soft ferromagnetic sandwiches, J. Magn. Magn. Mater. 93 (1991) 101
[68] J. Nogués, I. K. Schuller, Exchange bias, J. Magn. Magn. Mat. 192 (1999) 203
[69] M. N. Baibich, J. M. Broto, A. Fert, F. Nguyen Van Dau, F. Petroff, P. Etienne, G.
Creuzet, A. Friederich, J. Chazelas, Giant Magnetoresistance of (001)Fe/(001)Cr Magnetic
Superlattices, Physical Review Letters 61 (1988) 2472
[70] P. Grünberg, D. Bürgler, In Nanoelectronics and Information Technology: Advanced
Electronic Materials and Novel Devices, edited by R. Wasser (Wiley-VCH, Weinheim,
(2003) 109
[71] J. S. Moodera, L. R. Kinder, T. M. Wong, R. Meservey, Large Magnetoresistance at
Room Temperature in Ferromagnetic Thin Film Tunnel Junctions, Phys. Rev. Lett. 74 (1995)
3273
[72] J. C. S. Kools, W. Kula, D. Mauri, T. Lin, Effect of finite magnetic film thickness on Néel
coupling in spin valves, J. Appl. Phys. 85 (1999) 4466
[73] W. F. Egelhoff, P. J. Chen, C. J. Powell, M. D. Stiles, R. D. McMichael, C. L. Lin, J. M.
Sivertsen, J. H. Judy, K. Takano, A. E. Berkowitz, T. C. Anthony, Optimizing the giant
magnetoresistance of symmetric and bottom spin valves, J. A. Brug, J. Appl. Phys. 79 (1996)
5277
[74] F. Stobiecki, T. Stobiecki, Multilayer structures with Giant Magnetoresistance, Acta
Phys. Pol. A, 102 (2002) 7
[75] M. Julliere, Tunneling Between Ferromagnetic Films, Phys. Lett. 54A (1975) 225

-58-
[76] T. Miyazaki and N. Tezuka, Giant magnetic tunneling effect in Fe/Al2O3/Fe junction, J.
Magn. Magn. Mater. 139 (1995) L231
[77] S. Yuasa, T. Nagahama, A. Fukushima, Y. Suzuki, K. Ando, Giant room-temperature
magnetoresistance in single-crystal Fe/MgO/Fe magnetic tunnel junctions, Nature Materials 3
(2004) 868
[78] S. S. P. Parkin, C. Kaiser, A. Panchula, P. M. Rice, B. Hughes, M. Samant, S. H. Yang,
Giant Tunneling Magnetoresistance at Room Temperature with MgO(100) Tunnel Barriers,
Nature Materials 3 (2004) 862
[79] D. D. Djayaprawira, K. Tsunekawa, M. Nagai, H. Maehara, S. Yamagata, N. Watanabe,
S. Yuasa, Y. Suziki, K. Ando, 230% room-temperature magnetoresistance in
CoFeB/MgO/CoFeB magnetic tunnel junctions, Appl. Phys. Lett. 86 (2005) 092502
[80] L. Néel, On a new mode of coupling between the magnetizations of two thin
ferromagnetic layers, Comptes Rendus 255 (1962) 1676
[81] W. H. Meiklejohn, C. P. Bean, New Magnetic Anisotropy, Physical Review 102 (1956)
1413
[82] M. Tsunoda and M. Takahashi, Exchange anisotropy of ferromagnetic/
antiferromagnetic bilayers: intrinsic magnetic anisotropy of antiferromagnetic layer and
single spin ensemble model, J. Magn. Magn. Mater. 239 (2002) 149
[83] T. Stobiecki, J. Kanak, J. Wrona, M. Czapkiewicz, C. G. Kim, C. O. Kim, M. Tsunoda,
and M. Takahashi, Correlation between structure and exchange coupling parameters of IrMn
based MTJ, phys. stat. sol. (a) 201, No. 8, (2004) 1621

-59-
3. Aparatura technologiczna i wytwarzanie nanostruktur
3.1. Nanoszenie warstw metodą rozpylania jonowego
3.1.1. Aparatura
Cienkie warstwy metaliczne i układy wielu warstw naprzemiennie na siebie nakładanych
wytwarza się zasadniczo technikami próżniowymi. Aby metal nie uległ reakcji chemicznej z
gazami resztkowymi (tlenem, azotem) podczas procesu odparowania i był osadzony na
podłożu w jak najczystszej formie, proces powinien być przeprowadzony w ultra wysokiej
próżni (ultra high vacuum UHV), lub w komorze wypełnionej gazem szlachetnym (wcześniej
odpompowanej do jak najniższego ciśnienia), w przypadku gdy proces nanoszenia jest
plazmowy.
Złącza tunelowe i inne układy wielowarstwowe stosowane w urządzeniach elektroniki
spinowej wytwarza się głównie metodą rozpylania jonowego. Metoda ta nazywana w języku
angielskim cathode sputtering w języku polskim rozpylanie katodowe, polega na tym, że jony
gazu tworzące plazmę, pod wpływem wysokiego napięcia bombardują katodę wybijając
atomy, które osadzają się na podłożu tworząc cienką, polikrystaliczną warstwę.
Dla celów naukowych wytwarza się warstwy monokrystaliczne, które wzrastają epitaksjalnie
na zorientowanym krystalicznie podłożu. Stosuje się wtedy metodę odparowania z wiązki
molekularnej (molecular beam epitaxy MBE). Technologia ta, jak do tej pory, nie jest
stosowana do wytwarzania urządzeń elektroniki spinowej na skalę przemysłową.
Struktury wielowarstwowe omawiane w tej książce nanoszone były w różnych laboratoriach
zagranicznych, gdyż eksploatacja tych urządzeń jest bardzo kosztowna w utrzymaniu.
Pierwsze złącza tunelowe z barierą Al-O i MgO wytwarzano w laboratorium Uniwersytetu
Bielefeld (Niemcy), przy użyciu urządzenia ”Leybold CLAB600 Clustertool” firmy Leybold
Vacuum GmbH [84,85] wyposażonego w sześć tarcz (katod) z materiałów jakie wchodziły w
strukturę warstwową (Rys. 2.1). Układy wielowarstwowe nanoszono na utlenione
powierzchniowo podłoże Si(100) (stosuje się wafer Si aby proces był kompatybilny z
technologią wytwarzania układów scalonych CMOS) w warunkach wysokiej próżni o
ciśnieniu przed wypełnieniem komory argonem 10-7 hPa, mocy 115 W i ciśnieniu roboczym
argonu 1.3×10-3 hPa. Warunki nanoszenia ustalono na podstawie badań opublikowanych w
raportach i pracach doktorskich Uniwersytetu w Bielefeld (Rys. 3.2).

-60-
Rys. 3.1. Ogólny widok próżniowej aparatury do nanoszenia magnetycznych struktur wielowarstwowych
metodą jonowego rozpylenia Leybold CLAB600 Clustertool. Prosty system dla laboratorium uniwersyteckiego.
Rys. 3.2. Wnętrze aparatury próżniowej do nanoszenia magnetycznych struktur wielowarstwowych
metodą jonowego rozpylenia Leybold CLAB600 Clustertool. Widoczne katody z których rozpylany jest materiał. Prosty system dla laboratorium uniwersyteckiego.

-61-
Rys. 3.3. Aparatura ultra wysokiej próżni do nanoszenia magnetycznych struktur wielowarstwowych z laboratorium prof. M. Takahashi Uniwersytetu Tohoku w Sendai. 1 - kaseta z podłożami (wafers), 2 -
moduł transferowy, 3 - komora utleniania (wytwarzanie bariery), 4 - komora reaktywnego nanoszenia, 5 - komora targetów/katod (nanoszenie warstw metalicznych).
Złącza ze zmienną grubością warstwy swobodnej wytworzono w laboratorium prof. Migaku
Takahashi na Uniwersytecie Tohoku w Sendai (Rys. 3.3). Japońskie złącza tunelowe miały
następującą budowę: podłoże Si(100) z termicznie utlenioną warstwą SiOx/ bufor warstwa:
Cu 10 nm/ Ta 5nm/Cu 10nm/Ta 5nm/Ni80Fe20 2nm/Cu 5nm/ antyferromagnetyk Ir25Mn75
10nm/ warstwa przytrzymana Co70Fe30 2.5nm/ bariera Al-O/ warstwa swobodna złożona z
Co70Fe30 2.5nm i Ni80Fe20 t = 10, 30, 60, 100nm/ warstwa zabezpieczająca: Ta 5nm. Złącza
nanoszone były w komorze ultra wysokiej próżni odpompowanej do ciśnienia 4×10-9 hPa. Do
rozpylania jonowego zastosowano spektralnie czysty argon – Ar(9N). Takie warunki
zapewniają nanoszenie warstw o wysokiej czystości, wolnych od zanieczyszczeń gazami
resztkowymi. Bariera Al-O została utworzona poprzez napylenie warstwy Al o grubości
1.5 nm, która następnie została poddana procesowi utleniania, w plazmie mikrofalowej (2.45
GHz), w oddzielnej komorze oksydacyjnej [86].
Najlepszej jakości struktury wielowarstwowe zlecano do wykonania w laboratoriach
niemieckiej firmy Singulus Technologies AG (http://www.singulus.de/de/nano-
deposition.html).
Przykład aparatury przemysłowej przedstawia Rys. 3.4. System TIMARIS firmy Singulus,
umożliwia depozycję dziesięciu różnych materiałów na waflach Si o średnicy 300 mm, wraz z
5
1
2
3
4

-62-
kontrolą in-situ grubości deponowanych warstw. System ten wyposażony jest w pole
magnetyczne podczas nanoszenia struktury wielowarstwowej, które zapewnia jednoosiową
anizotropię magnetyczną konieczną do prawidłowej pracy zaworów spinowych
wykorzystywanych w głowicach odczytowych twardych dysków i pamięciach MRAM (Rys.
3.4) [87]
Rys. 3.4. Układ TIMARIS firmy Singulus. 1 - kaseta z podłożami (wafers), 2 - moduł transferowy, 3 -
komora trawienia jonowego (oczyszczanie powierzchni podłoża), 4 - komora targetów/katod (nanoszenie warstw metalicznych), 5 - komora utleniania (wytwarzanie bariery).
3.1.2. Rozpylanie katodowe Rozpylanie katodowe (sputtering) jest procesem zachodzącym w próżni. Przyłożenie
wysokiego napięcia w przestrzeni gazu roboczego (najczęściej argon pod ciśnieniem rzędu
10-2 mTr) powoduje powstanie plazmy: mieszanki elektronów i jonów gazu o bardzo
wysokich energiach. W procesie rozpylania jony przyśpieszane wysokim napięciem zostają
użyte do bombardowania tzw. „targetu”, czyli tarczy na potencjale katody wykonanej z
materiału, który ma zostać naniesiony na podłoże (na potencjale anody). W ten sposób atomy
tarczy zostają z niej wybite (Rys. 3.5) i uzyskują energię wystarczającą by dotrzeć do
podłoża, tworząc zarodki do polikrystalicznego wzrostu warstwy.
1
2
4 3 5

-63-
Rys. 3.5. Schemat procesu nanoszenia warstwy metodą sputtering. Metoda ta jest szybka, wydajna i stosunkowo tania (koszt procesu określa przede wszystkim
cena materiałów wchodzących w skład katod (targetów)), w związku z tym atrakcyjna z
punktu widzenia preparatyki na skalę przemysłową.
3.2. Utlenianie bariery Bariera izolacyjna utworzona została poprzez utlenienie w osobnej komorze warstwy Al
grubości 1.4 nm (Rys. 3.6), przy użyciu plazmowego generatora o częstości 2.46 GHz
(remote ECR Electron Cyclotron Resonance) jako źródła plazmy (RR 160 PQE firmy Roth
und Rau GmbH). Proces przebiegał w atmosferze tlenowej przy ustalonych parametrach tak
dobranych aby otrzymać maksymalną wartość TMR i odpowiednio małą rezystancję złącza
[84]. Ciśnienie tlenu wynosiło 2×10-3 hPa, przepływ tlenu ustalony był na poziomie 13 sccm
(przepływ mierzony w sccm=cm3/min), czas utleniania 100 s. Bariera Al-O ma stechiometrię
zbliżoną do związku Al2O3 i jest amorficzna.
W przypadku wytwarzania złącz z barierą MgO można postępować podobnie, prowadząc
utlenianie cienkiej warstwy Mg. Jednak znacznie lepsze wyniki, duży TMR (10.krotnie
wyższy niż dla Al-O) i małą rezystancję złącza uzyskuje się gdy bariera MgO jest rozpylana z
ceramicznego targetu MgO (o stechiometrii 50%at. Mg 50%at.O) gdyż tworzy się wtedy
silnie steksturowane, polikrystaliczne [001] MgO.
Target = katoda
Podłoże Anoda Anoda
Jony Ar+
Elektrony
DC, RF Plazma Plazma
Ar ( < 10-2 mbar)
Magnesy stałe Magnetron
S N S
S N
Pole

-64-
Po utworzeniu bariery proces nanoszenia kolejnych warstw był kontynuowany w komorze do
nanoszenia warstw metalicznych.
3.3. Wygrzewanie
W celu wymuszenia jednoosiowej anizotropii jednozwrotowej (koniecznej do otrzymania
charakterystyki przełączania typu zawór spinowy) próbki należy wygrzewać w polu
magnetycznym (80 kA/m), w próżni (10-7 hPa) w temperaturze pomiędzy 250°C a 350°C, tak
dobranej aby zastosowany antyferromagnetyk uległ rozporządkowaniu (odpowiada to stanowi
powyżej temperatury Néela), a jednocześnie nie zachodziła dyfuzja atomów między
warstwami. Wygrzewanie najczęściej prowadzi się przez 1 godzinę, a następnie schładza
przez około 20 minut do osiągnięcia temperatury pokojowej. Proces wygrzewania powoduje
porządkowanie się w krystalitach antyferromagnetyka (AF) momentów magnetycznych na
kierunek przyłożonego pola magnetycznego, aż do zamrożenia tego stanu podczas
schładzania.
Mechanizm powstawania pola sprzężenia wymiennego (exchange bias), na skutek
wygrzewania i schładzania w polu magnetycznym, opisano w rozdziale 2.8.
Proces wygrzewania w polu magnetycznym prowadzi do wzrostu TMR na skutek
zrelaksowania się defektów strukturalnych i uporządkowaniu magnetycznemu układu (Rys.
3.6).
100 150 200 250 300 3500
5
10
15
20
25
30
35
40
45
TMR
[%]
Temperatura wygrzewania [oC]
100 nm 10 nm
Max TMR
Rys. 3.6. Wpływ temperatury wygrzewania na wartość TMR dla złącz tunelowych z bariera Al-O.
Grubości warstwy swobodnej NiFe 100 nm i 10 nm.

-65-
3.4. Litografia optyczna
Próbki do pomiarów TMR zostały poddane procesowi litografii w celu otrzymania złącz o
różnych wymiarach powierzchniowych od 7.5 µm do 300 µm (Rys. 3.8). Na Rys. 3.7
przedstawione są kolejne etapy litografii optycznej. Na próbkę został naniesiony fotorezyst
(Rys. 3.7b). Następnie próbka została wygrzana w temperaturze 80ºC przez 30 minut w celu
utrwalenia fotorezystu. W dalszym etapie próbka została naświetlona promieniowaniem
laserowym (długość fali ultrafiolet) (Rys. 3.7c) poprzez specjalną maskę (Rys. 3.8). W
ostatnim etapie fotorezyst został usunięty z naświetlonych miejsc przy użyciu wywoływacza
(Rys. 3.7d).
Rys. 3.7. Etapy litografii optycznej. Podłoże z układem wielowarstwowym (a). Próbka pokryta
fotorezystem (b). Próbka naświetlona z położoną na wierzch maską (c). Z naświetlonych obszarów usunięty fotorezyst (d).
W wyniku opisanego procesu powierzchnia próbki pokryta została zabezpieczającą warstwą
fotorezystu o kształcie określonym przez maskę (Rys. 3.8). W dalszym etapie, w procesie
wytrawiania jonowego otrzymuje się kolumnową strukturę złącza (Rys. 3.7).
Rys. 3.8. Maska do litografii optycznej z kwadratowymi kształtami złącz o długości boków 300, 200, 100,
22.5 i 7.5 µm.
3.4.1. Wytrawianie jonowe
Próbki poddane procesowi litografii optycznej zostały następnie poddane procesowi
wytrawiania jonowego. Wytrawianie zostało wykonane przy użyciu urządzenia UniLab –
Roth&Rau AG [88]. Komora trawienia została odpompowana do ciśnienia 5×10−6 hPa a
proces trawienia przeprowadzano w plazmie Ar pod ciśnieniem 1.2×10−3 hPa. W czasie
(a) (b) (c) (d)

-66-
wytrawiania próbki były obracane wokół osi prostopadłej do ich powierzchni w celu
uzyskania jednorodnej powierzchni o średnicy 30 mm.
Na rysunku (Rys. 3.9b) zostały przedstawione etapy wytrawiania jonowego. Próbka z
naniesioną strukturą fotorezystu, otrzymaną w procesie litografii optycznej (Rys. 3.9a),
zostaje poddana procesowi wytrawiania jonowego (Rys. 3.9b). Następnie fotorezyst zostaje
usunięty z powierzchni próbki. W wyniku wytrawiania jonowego zostaje odtworzona
słupkowa struktura o kształcie odpowiadającym masce użytej w procesie litografii optycznej.
Rys. 3.9. Drugi etap litografii z wytrawianiem jonowym. Próbka z fotorezystem w kształcie maski na powierzchni (a). Wytrawianie warstw do warstwy Cu – dolna elektroda (b). Usunięcie fotorezystu z
próbki – Au – górna elektroda (c).
Na rysunku (Rys. 3.10) przedstawiono zdjęcie powierzchni próbki ze strukturą otrzymaną w
procesie litografii. Widoczne kwadraty to złącza o długości boku: 300 µm, 100 µm, 22.5 µm i
7.5 µm.
Rys. 3.10. Obraz mikroskopowy próbki otrzymanej w procesie litografii i wytrawiania. Widoczne
kwadraty to złącza o długości boku: 300, 100, 22.5 i 7.5 µm. Na zdjęciu widoczne dwie elektrody Au (ciemne kreski) doprowadzające prąd do górnej elektrody złącza o boku 100 µm.
3.5. Litografia elektronowa Dla wielu współczesnych zastosowań (np. komórki MRAM) istnieje potrzeba wytworzenia
elementów o rozmiarach rzędu nanometrów [89]. Takie rozmiary są niezbędne między
innymi przy wykonywaniu elementów o niskim iloczynie rezystancji i powierzchni
(a) (b) (c)

-67-
(resistance area RA product). Podstawowym ograniczeniem litografii optycznej jest brak
możliwości naświetlenia obszarów mniejszych niż długość fali wiązki optycznej, typowo
pojedyncze mikrometry. Do wytworzenia złącz o rozmiarach rzędu nanometrów służy proces
litografii elektronowej. Proces ten jest analogiczny do litografii optycznej, z tym, że
odpowiedni fotorezyst jest naświetlany przy pomocy wiązki elektronów, a nie wiązki lasera.
Omówiony zostanie trzystopniowy proces litografii elektronowej na przykładzie wytwarzania
nanokolumn (nanopillar) magnetycznych złącz tunelowych z cienką barierą MgO.
Typowo, na potrzeby litografii używa się skaningowego mikroskopu elektronowego (Rys.
3.11) (scanning electron microscope SEM).
Rys. 3.11. Skaningowy mikroskop elektronowy do naświetlania masek (firmy Raith) wraz z laserowym
interferometrycznym sterowaniem stolika.
Wiązka elektronów jest przyspieszana przy pomocy wysokiego napięcia i skupiana dzięki
zastosowaniu specjalnych soczewek magnetycznych. Typowy rozmiar plamki to okrąg o średnicy
pojedynczych nanometrów. Odbite od powierzchni próbki elektrony umożliwiają obserwacje próbki z
rozdzielczością kilku nanometrów, a więc możliwa jest dokładna kontrola naświetlonych obszarów
przy zastosowaniu odpowiedniego rezystu – pozytywowego (obszary naświetlone zostaną
rozpuszczone w wywoływaczu) lub negatywowego (obszary naświetlone zostaną utwardzone i
pozostaną na próbce). Można zatem naświetlić obszary o bardzo małych rozmiarach i dzięki
zastosowaniu trawienia jonowego wytworzyć nanokolumny ze stosu warstw wchodzących w skład
złącza tunelowego.
Do pomiarów elektrycznych w reżimie wysokich częstotliwości (GHz) należy dodatkowo
wytworzyć 50Ω doprowadzenia impedancyjnie dopasowane. W tym celu można posłużyć się
zarówno litografią optyczną jak i elektronową. Cały proces trzystopniowej litografii
elektronowej można przedstawić w następujących krokach:

-68-
• zdefiniowanie dolnej elektrody,
• jonowe trawienie układu do podłoża,
• zdefiniowanie nanopilaru oraz kontaktu do dolnego doprowadzenia,
• trawienie jonowe do materiału przewodzącego poniżej izolatora,
• nanoszenie warstwy izolatora,
• lift-off (tworzenie kontaktu do nanopilaru, przez „zdarcie” górnej warstwy
rezystu),
• nanoszenie warstwy przewodzącej stanowiącej górne doprowadzenie,
• zdefiniowanie górnego doprowadzenia.
Rysunek (Rys. 3.12) przedstawia poszczególne kroki procesu.
Rys. 3.12. Poszczególne kroki trzystopniowego procesu litografii elektronowej. a – zdefiniowanie dolnej elektrody, b – zdefiniowanie nanokolumny, c – trawienie jonowe, d – nanoszenie izolatora, e – lift-off
(wytworzenie kontaktu do nanopilaru), f – nanoszenie i definiowanie górnej elektrody. Tak wytworzona struktura jest gotowa do pomiarów elektrycznych. Rysunek (Rys. 3.13)
przedstawia zdjęcie z mikroskopu elektronowego nanopilaru złącza tunelowego z barierą
MgO wraz z dolnym doprowadzeniem.

-69-
Rys. 3.13. Zdjęcia eliptycznej (100 nm×230 nm) nanokolumny MTJ (a) oraz dolnego doprowadzenia wraz
z nanokolumną (b) wykonane przy pomocy skaningowego mikroskopu elektronowego. [84] J. Kanak, “Dyfrakcja rentgenowska na układach wielowarstwowych – metody pomiaru i
modele”, rozprawa doktorska, AGH Kraków 2006
[85] Leybold Vakuum GmbH, www.leyboldvac.de
[86] M. Tsunoda, K. Nishikawa, S. Ogata, and M. Takahashi, 60% magnetoresistance at
room temperature in Co–Fe/Al–O/Co–Fe tunnel junctions oxidized with Kr–O2 plasma, Appl.
Phys. Lett. 80 (2002) 3135
[87] Materiały ze strony internetowej: www.singulus.com
[88] Roth&Rau AG, UniLab system, www.roth-rau.de
[89] W. Skowroński, T. Stobiecki, J. Wrona, K. Rott, A. Thomas, G. Reiss and Sebastiaan
van Dijken, Interlayer exchange coupling and current induced magnetization switching in
magnetic tunnel junctions with MgO wedge barrier, Journal of Applied Physics 107, (2010)
093917

-70-

-71-
4. Metody charakteryzacji strukturalnej przed procesem nanostrukturyzacji
4.1. Dyfrakcja rentgenowska na cienkich warstwach
Dyfrakcja rentgenowska jest szeroko stosowanym narzędziem do badania struktury
krystalograficznej ciał stałych [90]. Jest jedną z podstawowych nieniszczących i
nieinwazyjnych metod. Przy jej użyciu można przeprowadzić analizę próbki i uzyskać
informacje zarówno o składzie jak i o uporządkowaniu atomowym badanego materiału.
Jednym z możliwych zastosowań dyfrakcji rentgenowskiej jest badanie cienkich warstw i
układów wielowarstwowych. Pozwala ona na otrzymanie informacji o rodzaju materiałów
wchodzących w skład próbki cienkowarstwowej, jej strukturze krystalicznej, rozmiarach
krystalitów, rozkładzie kierunków krystalograficznych (teksturze), grubości i szorstkości
powierzchniowej.
Na typowy dyfraktometr rentgenowski, przystosowany do badania cienkich warstw w trybie
odbiciowym, składają się następujące elementy:
• źródło promieniowania rentgenowskiego (lampa rentgenowska lub promieniowanie
synchrotronowe),
• układ formujący wiązkę pierwotną (układy szczelin, układ monochromatyzujący
wiązkę),
• stolik, na którym umieszczona jest badana próbka,
• układ formujący wiązkę wtórną, ugiętą na próbce (układy szczelin, monochromatory),
• detektor promieniowania ugiętego.
Powyższe elementy oraz rodzaje pomiarów stosowane w badaniu cienkich warstw zostaną
omówione dalej na przykładzie dyfraktometru rentgenowskiego firmy Philips X’Pert MPD
(Multi – Purpose Diffractometer).
4.2. Dyfraktometr X’Pert MPD Szkic goniometru X’Pert MPD przedstawiony jest na rysunku (Rys. 4.1). Goniometr posiada
dwa ramiona, które mogą poruszać się niezależnie podczas pomiaru. Na jednym ramieniu
umieszczona jest lampa z anodą miedzianą oraz z układem formującym wiązkę pierwotną.
Drugie ramię wyposażone jest w detektor i układ formujący wiązkę wtórną. W osi
goniometru znajduje się stolik, na którym umieszcza się próbkę.

-72-
Rys. 4.1. Widok goniometru X'Pert MPD.
Urządzenie zostało rozbudowane do trzech torów detekcyjnych (Rys. 4.2). Dolny tor jest
skonfigurowany do pomiarów w geometrii wiązki równoległej. Tor środkowy służy do
pomiarów rentgenowskich w geometrii Bragga-Brentana. Dodatkowo goniometr został
wyposażony w trzeci detektor. Jest to pozycjo-czuły paskowy detektor krzemowy, który
umożliwia skrócenie czasu pomiarów.
Rys. 4.2. Goniometr wraz z trzema torami detekcyjnymi oznaczonymi na rysunku strzałkami. Geometria wiązki równoległej (czerwona), geometria Bragga-Brentana (niebieska), pozycjoczuły detektor paskowy
(zielona).
koło Eulera
lampa
lampa
detektor stolik
ramiona goniometru

-73-
Dodatkowo dyfraktometr wyposażono w koło Eulera (Euler cradle), które umożliwia
przechylanie próbki o kąt ψ oraz obrót stolika z próbką o kąt φ wokół osi z prostopadłej do
powierzchni próbki (Rys. 4.9), co pozwala na pomiar figury biegunowej dostarczającej
informacji o rozkładzie kierunków krystalograficznych w próbce.
4.3. Geometrie pomiarów
4.3.1. Pomiary w geometrii Bragga-Brentana W geometrii Bragga-Brentana rozbieżna wiązka promieniowania rentgenowskiego pada na
próbkę, ulega dyfrakcji a następnie jest ogniskowana na szczelinie odbiorczej umiejscowionej
przed detektorem (Rys. 4.1). Wiązka pierwotna jest formowana układem szczelin, które
zapewniają jej odpowiednie rozwarcie i oświetlenie żądanej powierzchni badanej próbki. Przy
dużym rozwarciu wiązki otrzymuje się wzrost natężenia, a tym samym skrócenie czasu
pomiaru, jest to jednak związane z rozmyciem piku dyfrakcyjnego. Szerokość wiązki ustalana
jest w taki sposób aby otrzymać odpowiednio dużą powierzchnię oświetlenia próbki przy
jednoczesnym spełnieniu warunku ogniskowania. W przypadku pomiarów cienkich warstw
badanych w niniejszej pracy stosowane były takie rozwartości szczeliny dywergencyjnej, dla
których oświetlenie próbki wynosiło od 0.5 cm do 1 cm. Wiązka wtórna ogniskowana jest na
pojedynczej szczelinie, której szerokość jest regulowana. Przy zwiększaniu szerokości
szczeliny otrzymujemy wzrost natężenia promieniowania docierającego do licznika przy
jednoczesnym zmniejszeniu rozdzielczości. Ma to szczególne znaczenie w przypadku
cienkich warstw, gdzie natężenie promieniowania ugiętego na próbce jest bardzo małe.
Rys. 4.1. Geometria pomiaru Bragga-Brentana.

-74-
4.3.2. Pomiary w geometrii wiązki równoległej Geometria płasko równoległa jest szczególnie przydatna do badania cienkich warstw dla
małego kąta padania wiązki pierwotnej – jest to tzw. pomiar GID (Grazing Incidence
Diffraction) czyli dyfrakcja dla małych kątów padania. Układ formujący wiązkę pierwotną
jest identyczny z układem stosowanym dla geometrii Bragga-Brentana. Podstawową różnicą
jest sposób formowania wiązki ugiętej na próbce. Na drodze wiązki wtórnej umieszczony jest
układ szczelin Sollera (Soller slits) ustawionych prostopadle do płaszczyzny dyfrakcji, które
przepuszczają promienie równoległe do blaszek tworzących układ szczelin i zatrzymują
promienie padające pod kątem (Rys. 4.2).
Za układem szczelin Sollera można umieścić dodatkową ruchomą szczelinę odbiorczą, która
wycina z całej wiązki wąski pasek. Szczelinę tę stosuje się w pomiarach reflektometrycznych
(reflectivity).
Rys. 4.2. Schemat pomiaru w geometrii płasko równoległej (wraz z dodatkową szczeliną odbiorczą).
Innymi pomiarami wykonanymi przy użyciu tej geometrii pomiaru są pomiary figur
biegunowych. Pomiary te wykonuje się bez dodatkowej szczeliny odbiorczej. W przypadku
zastosowania geometrii płasko równoległej natężenie promieniowania jest większe niż dla
licznika pracującego w geometrii Bragga-Brentana. Zastosowanie tej geometrii pomiaru
pozwala na znaczne skrócenie czasochłonnych pomiarów figur biegunowych.
4.4. Układy szczelin formujące wiązkę pierwotną i wtórną Na rysunku (Rys. 4.3) przedstawione są schematycznie układy formujące wiązkę pierwotną i
wtórną w metodzie ogniskującej Bragga-Brentana. Promieniowane generowane jest przez
lampę z anodą miedzianą (X-ray tube) i emitowane z lampy poprzez okienko berylowe. Dalej
na drodze wiązki pierwotnej ustawione są, równolegle do płaszczyzny dyfrakcji, szczeliny
Sollera (Soller slits). Zapewniają one równoległość promieni biegnących od lampy do próbki.
Za układem szczelin Sollera znajduje się szczelina dywergencyjna (divergence slit), która

-75-
ogranicza rozbieżność wiązki i pozwala na oświetlenie żądanej powierzchni próbki. Szczelina
może pracować w dwóch podstawowych trybach: ze stałą rozwartością kątową wiązki oraz ze
stałym oświetleniem obszaru próbki. Za szczelinami znajduje się dodatkowo wymienna
szczelina pionowa tzw. maska (nie pokazana na rysunku). Przepuszcza ona wiązkę o żądanej
szerokości dobraną odpowiednio do rozmiarów badanej próbki.
Dla płasko równoległej geometrii pomiaru układ formujący wiązkę pierwotną jest taki sam
jak w przypadku geometrii Bragga-Brentana.
Rys. 4.3. Układy formujące wiązkę pierwotną i wtórną w dyfraktometrze. X’Pert MPD.
Wiązka wtórna po ugięciu na próbce formowana jest przez układ dwóch szczelin (Rys. 4.3).
Pierwsza szczelina antyrozproszeniowa (anti-scatter slit) ma za zadanie przepuszczać tylko
promieniowanie dochodzące z określonego obszaru próbki i wycinać z wiązki wtórnej
promieniowanie rozproszone w innych częściach próbki oraz w powietrzu. Szczelina ta,
podobnie jak w przypadku szczeliny dywergencyjnej na wiązce pierwotnej, może pracować
ze stałą rozwartością kątową lub ze stałym obszarem powierzchni próbki, z którego zbierane
jest promieniowanie. Za nią znajduje się szczelina odbiorcza (receiving slit) o regulowanej
szerokości, na której zachodzi ogniskowanie wiązki ugiętej. Rozwartość szczeliny odbiorczej
ustalana jest zwykle w przedziale od 0.1 do 0.3 mm. W przypadku geometrii wiązki
równoległej szczeliny te zastąpione są przez układ obróconych o 90º szczelin Sollera oraz
ruchomą szczelinę odbiorczą.
Za układem szczelin znajdują się następne szczeliny Sollera ustawione równolegle do
płaszczyzny dyfrakcji. Za nimi umieszczony jest monochromator przepuszczający

-76-
promieniowanie Cu-Kα. Promieniowanie po przejściu przez monochromator rejestrowane jest
w detektorze.
4.5. Rodzaje pomiarów dyfrakcyjnych w badaniach cienkich warstw
Układy wielowarstwowe, w zależności od celu badań lub ich aplikacyjnego przeznaczenia,
charakteryzują się różnymi grubościami poszczególnych warstw wchodzących w skład
układu. Grubości te mogą się zmieniać, w zależności od układu, od ułamka do kilkuset
nanometrów. Metaliczne warstwy wchodzące w skład magnetycznych struktur
wielowarstwowych w znakomitej większości mają grubości nie przekraczające 50 nm a
aktywne warstwy magnetyczne mogą mieć grubości kilku ułamka nanometrów. Ze względu
na małe grubości warstw składających się na układy wielowarstwowe, pomiary dyfrakcyjne
wykonywane na takich układach są pomiarami trudnymi i czasochłonnymi, gdyż sygnał
pochodzący od tak cienkich warstw jest bardzo słaby. Dlatego wybór odpowiednich
warunków i sposobu pomiaru jest bardzo ważny dla uzyskania jak najlepszych rezultatów.
4.5.1. Pomiar θ-2θ
Pomiar θ-2θ jest jednym z podstawowych pomiarów dyfrakcyjnych na cienkich warstwach.
Zwany jest też pomiarem goniometrycznym i spełnia warunki rozpraszania zwierciadlanego.
W pomiarze tym wektor dyfrakcji Khkl jest prostopadły do płaszczyzny próbki. Dyfrakcja
zachodzi na płaszczyznach równoległych do powierzchni próbki.
Stosuje się także pomiar θ-2θ z offsetem. W takim przypadku dyfrakcja zachodzi na
płaszczyznach przechylonych w stosunku do płaszczyzny próbki o określony kąt. Kąt ten
równy jest odchyleniu wektora dyfrakcji Khkl od prostopadłej do próbki.
Rys. 4.4. Geometria pomiaru θ-2θ z offsetem = 0.

-77-
Pomiar θ-2θ może służyć do analizy fazowej, wstępnej analizy rozkładu kierunków
krystalograficznych (tekstury) i wyznaczenia rozmiaru krystalitów cienkich warstw w
kierunku prostopadłym do powierzchni próbki. Z położeń pików dyfrakcyjnych można
określić rodzaj warstw wchodzących w skład układu wielowarstwowego oraz odległości
międzypłaszczyznowe. W związku z tym, że informacja pochodzi od płaszczyzn
równoległych do powierzchni cienkiej warstwy (a zarazem podłoża, na którym cienka
warstwa wyrosła) na kształt profilu i natężenia pików wpływa tekstura. W przeciwieństwie do
próbek proszkowych, w których krystality są zorientowane losowo, krystality struktur
warstwowych w większości przypadków układają się, w mniejszym lub większym stopniu,
zgodnie z kierunkiem preferowanej orientacji. Powoduje to brak lub osłabienie natężenia
niektórych pików w widmie, a w przypadku silnego steksturowania obecność tylko pików od
jednej rodziny płaszczyzn. Analiza takiego widma pozwala na określenie kierunku wzrostu
warstw. Porównanie natężeń pików w widmach mierzonych w podobnych warunkach
pozwala na wstępne stwierdzenie stopnia steksturowania układów.
Dokładna analiza pików braggowskich dostarcza informacji na temat odległości
międzypłaszczyznowych oraz rozmiarów krystalitów w układzie wielowarstwowym.
Odległość międzypłaszczynową określa się na podstawie położenia piku braggowskiego. Do
określenia rozmiarów krystalitów potrzebna jest dodatkowo szerokość połówkowa piku. Na
podstawie wzoru Scherrera [90] można wyznaczyć średni rozmiar krystalitu w warstwie w
kierunku prostopadłym do powierzchni próbki.
D – rozmiar krystalitu,
λ – długość fali promieniowania,
FWHM (Full Width at Half Maximum) – szerokość połówkowa piku braggowskiego,
θ – kąt Bragga.
Pomiar θ-2θ jest jednym z podstawowych pomiarów przy charakteryzacji strukturalnej
periodycznych układów wielowarstwowych. W odróżnieniu od struktur nieperiodycznych w
widmie periodycznych układów wielowarstwowych pojawiają się piki, które nie pochodzą od
materiałów tworzących poszczególne warstwy. Widmo dyfrakcyjne θ-2θ periodycznego
układu wielowarstwowego jest superpozycją natężeń pochodzących od warstw tworzących
sztuczną supersieć (artificial superlattice). Poprzez analizę widma supersieci można
wyznaczyć odległości międzypłaszczyznowe i period (łączna grubość dwóch sąsiednich
θλcos
9.0FWHM
D =,
(4-1)

-78-
warstw z materiałów A i B). Przy użyciu odpowiednich programów symulujących widmo
dyfrakcyjne, można dodatkowo określić inne parametry charakteryzujące badany układ
wielowarstwowy. Są to m.in: fluktuacje grubości podwarstw, rozmiar obszaru mieszania
materiałów na międzypowierzchniach sąsiadujących warstw, czy fluktuacje grubości
międzypowierzchni. Wyznaczenie tych parametrów pozwala na określenie jakości budowy
warstwowej układu.
4.5.2. Pomiar 2θ
W pomiarze 2θ (GID w przypadku małych kątów padania ω) kąt padania wiązki pierwotnej ω
jest stały, zmienia się jedynie kąt 2θ. Wektor dyfrakcji Khkl zależy od kąta 2θ i zwykle nie jest
prostopadły do płaszczyzny próbki (Rys. 4.5). W pomiarze tym dyfrakcja zachodzi na
płaszczyznach sieciowych, które nie są równoległe do powierzchni próbki, lecz przechylone
w stosunku do niej pod pewnym kątem. W związku z powyższym mierzone widmo zależy od
uporządkowania i orientacji krystalitów.
Rys. 4.5. Geometria pomiaru 2θ.
Pomiary te są użyteczne przy badaniu cienkich warstw. Stosując odpowiednio mały kąt
padania wiązki na próbkę można uzyskać informację od warstw leżących do pewnej
głębokości. Promieniowanie padające na próbkę pod małym kątem dociera jedynie do warstw
leżących płytko pod powierzchnią próbki. Wybierając odpowiedni kąt padania można
sterować głębokością wnikania promieniowania i badać strukturę warstw na różnej
głębokości.
Rys. 4.6. Wpływ metody pomiaru na widmo próbki o różnie steksturowanych warstwach.

-79-
W przypadku układów wielowarstwowych, składających się z warstw materiałów o
podobnych stałych sieciowych, piki w widmie θ-2θ pochodzące od takich warstw będą się
pokrywać (Rys. 4.6). W przypadku warstw które mają krystality dowolnie zorientowane
pomiar 2θ pozwala na uzyskanie dodatkowych informacji o orientacji krystalitów, które są
niedostępne w pomiarze θ-2θ (czyli o tych krystalitach, których płaszczyzny sieciowe nie są
równoległe do płaszczyzny podłoża). Przy zmniejszaniu kąta padania wiązki ω, natężenie
piku od silnie steksturowanej warstwy (z płaszczyznami sieciowymi ustawionymi równolegle
do podłoża) maleje szybciej niż w przypadku warstwy o słabej teksturze (Rys. 4.6). Dzięki
temu przy odpowiednio małym kącie padania wiązki pierwotnej można uzyskać dodatkową
informację (np. rozmiar krystalitów) o słabo steksturowanej warstwie, niedostępną w
pomiarze θ-2θ.
4.5.3. Pomiar ω
W pomiarze ω (rocking curve) położenie detektora względem lampy jest ustalone dla
wartości kąta 2θ odpowiadającej kątowi braggowskiemu wybranego piku. W czasie pomiaru,
przy ustalonym kącie 2θ, zmieniany jest kąt ω (Rys. 4.7). W pomiarze tym sygnał pochodzi
od rodziny płaszczyzn, których odległość międzypłaszczyznowa odpowiada wybranemu
kątowi 2θ. Wraz ze zmianą kąta ω zmienia się kierunek wektora dyfrakcji Khkl, co odpowiada
odbiciom od płaszczyzn, spełniających warunek Bragga, ułożonych pod różnymi kątami w
stosunku do powierzchni próbki.
Rys. 4.7. Geometria pomiaru ω.
Szerokość otrzymanego piku jest zależna od stopnia steksturowania badanej warstwy.
Krystality w słabo steksturowanej warstwie są rozorientowane (Rys. 4.8a). Pik pochodzący od
takiej warstwy jest szeroki. Warstwy silnie steksturowane, w których odpowiednie
płaszczyzny sieciowe są równolegle zorientowane w stosunku do powierzchni próbki dają w
pomiarze wąski pik o dużym natężeniu (Rys. 4.8c).

-80-
Rys. 4.8. Schemat ideowy pomiaru ω. Warstwa słabo steksturowana wraz z odpowiadającym jej profilem
dyfrakcyjnym (a), warstwa o teksturze pośredniej (b), warstwa silnie steksturowana (c).
Profile otrzymane z pomiarów ω analizuje się stosując rozkład Gaussa dla rozkładu
kierunków orientacji krystalitów w warstwie:
⎟⎟⎠
⎞⎜⎜⎝
⎛ −−= 2
20
2)(exp
21)(
σωω
πσωP (4-2)
Wartość odchylenia standardowego σ, otrzymanego z dopasowania do widma
eksperymentalnego, jest współczynnikiem mówiącym o stopniu steksturowania warstwy. Do
opisu stopnia steksturowania stosuje się też szerokość połówkową piku (FWHM), która jest
powiązana z odchyleniem standardowym zależnością:
σσ 355.22ln22 ≈=FWHM . (4-3)
4.5.4. Figury biegunowe W pomiarze figury biegunowej położenie lampy i detektora jest ustalone dla kąta 2θ
odpowiadającego wybranemu pikowi dyfrakcyjnemu. Podczas pomiaru próbka jest obracana
za pomocą koła Eulera. Badana próbka może być przechylana o kąt ψ oraz obracana o kąt φ
wokół osi Z prostopadłej do płaszczyzny próbki. Przechylenie próbki o kąt ψ powoduje
wychylenie osi Z z płaszczyzny utworzonej przez wiązkę pierwotną i wtórną.
Rys. 4.9. Geometria pomiaru figury biegunowej.
Pomiar figury biegunowej pozwala wyznaczyć dwuwymiarową mapę natężeń, która jest
wynikiem przestrzennej orientacji krystalitów w badanym materiale.
(a) (b) (c)
(a) (b) (c)

-81-
4.5.5. Reflektometria
W pomiarze reflektometrycznym, podobnie jak w pomiarze goniometrycznym, wektor
dyfrakcji jest zawsze prostopadły do płaszczyzny próbki. Jest to rodzaj pomiaru θ-2θ, dla
małych kątów 2θ, dla którego krzywa reflektometryczna powstaje w wyniku całkowitego
zewnętrznego odbicia (współczynnik załamania n < 1 dla promieni X) dla kątów większych
od kąta krytycznego (granicznego).
W pomiarze reflektometrycznym kąt 2θ zmienia się od około zera do 5o (maksymalnie do
15o). Wybór górnej granicy zależy od zmian w zaniku oscylacji spowodowanych odbiciem od
granic warstwy. Szybki zanik oscylacji jest spowodowany dużą szorstkością powierzchni
górnej i dolnej warstwy, bądź obszarów międzywarstwowych w układzie wielowarstwowym.
Analiza widma otrzymanego z tego pomiaru dostarcza informacji o grubościach warstw i ich
szorstkościach.
Pomiar reflektometryczny jest podstawową i powszechnie stosowaną metodą do bardzo
dokładnego wyznaczania grubości nanoszonych warstw. Jest wykorzystywany do
wyznaczenia krzywej kalibracji grubości (wyznaczenia prędkości osadzania się warstwy) dla
urządzeń próżniowych przeznaczonych do wytwarzania struktur cienkowarstwowych.
4.6. Wpływ warstw buforowych na mikrostrukturę i własności złącz tunelowych z barierą Al-O
Na rysunku (Rys. 4.10) przedstawione zostało złącze tunelowe o strukturze Si(100)/SiOx/
bufor/IrMn 12nm/CoFe t/Al-O 1.4nm/NiFe 3nm/Ta 5nm. Złącza tunelowe o takiej strukturze
zostały wykonane dla czterech różnych rodzajów buforów (oznaczanych dalej literami a, b, c i
d) [92]. Warstwy IrMn i CoFe naniesione na układy czterech różnych warstw buforowych
wykazały różny stopień steksturowania i różną szorstkość powierzchniową w zależności od
użytego bufora. Rodzaj i sekwencja użytych w buforze warstw silnie zmieniała strukturę
krystaliczną złącza, co w konsekwencji wpływało na własności magnetyczne i elektryczne
badanych układów.

-82-
Rys. 4.10. Struktura warstwowa złącz tunelowych naniesionych z czterema różnymi zestawami warstw
buforowych: Cu 25nm (a), Ta 5nm/Cu 25nm (b), Ta 5nm/Cu 25nm/Ta 5nm/Cu 5nm (c), Ta 5nm/Cu 25nm/Ta 5nm/NiFe 2nm/Cu 5nm (d).
4.6.1. Pomiary θ-2θ
Na rysunku (Rys. 4.11) przedstawione są widma dyfrakcyjne θ-2θ zmierzone na złączach
tunelowych z warstwą FP=CoFe o grubości 15 nm dla czterech rodzajów buforów: a – Cu
25nm, b – Ta 5nm/Cu 25nm, c –- Ta 5nm/Cu 25nm/Ta 5nm/Cu 5nm oraz d – Ta 5nm/Cu
25nm/Ta 5nm /NiFe 2nm/Cu 5nm.
Na górnym wykresie (Rys. 4.11a) są widma w szerokim zakresie kątowym 2θ dla próbek z
buforami a i b, które wykazują największe różnice w natężeniach pików pochodzących od
warstw układu. Dolny wykres (Rys. 4.11b) przedstawia widma w zakresie kątowym od 38 do
53 stopni, z pikami pierwszego rzędu struktury kubicznej fcc-Cu(111), fcc-IrMn(111) oraz
bcc-CoFe(110). Dla próbki z buforem a oprócz piku Cu (111) widać wyraźny pik pochodzący
od płaszczyzn sieciowych Cu(200), który nie występuje dla pozostałych układów warstw
buforowych. Istnienie obu kierunków krystalograficznych dla bufora a świadczy o większym
nieporządku strukturalnym niż w buforach b, c i d.
Natężenia wierzchołków pochodzących od tego samego rodzaju warstw różnią się znacznie w
zależności od rodzaju bufora w próbce. Najmniejsze natężenie mają piki w widmie
zmierzonym na próbce z buforem a natomiast największe dla próbki z buforem b. Natężenia
pików pochodzących od warstw miedzi Cu(111), antyferromagnetyka IrMn(111) i warstwy
zamocowanej CoFe(110) oraz od ich drugich rzędów Cu(222), IrMn(222) oraz CoFe(220) są
dla bufora b około dwa rzędy wielkości silniejsze niż w przypadku bufora a.
(a) (b) (c) (d)

-83-
Rys. 4.11. Profile θ-2θ w szerokim zakresie kątowym (a) i wąskim zakresie w otoczeniu pików IrMn(111), Cu(111) i CoFe(110) (b) dla próbek MTJ z warstwą FP-CoFe 15nm o różnych buforach: a – Cu 25nm, b
– Ta 5nm/Cu 25nm, c – Ta 5nm/Cu 25nm/Ta 5nm/Cu 5nm, d – Ta 5nm/Cu 25nm/Ta 5nm/NiFe 2nm/Cu 5 nm.
4.6.2. Pomiary ω i figur biegunowych
Pomiary ω (rocking curve) (Rys. 4.12) i figur biegunowych (polar figures) (Rys. 4.13)
potwierdzają silny wpływ warstw buforowych na stopień steksturowania. Z kształtu profili
rocking curve wynika, że warstwa Cu 25 nm wyrastająca wprost na amorficznym tlenku
krzemu jest niesteksturowana (krystality Cu (111) są przestrzennie losowo zorientowane,
występują też krystlity Cu (200)). Wyrastająca natomiast na Ta 5nm warstwa Cu jest silnie
steksturowana w kierunku [111] prostopadłym do podłoża. Warstwy magnetyczne IrMn i
(a)
(b)

-84-
CoFe, tak jak Cu o strukturze kubicznej, kontynuują steksturowany wzrost, jednak w
przypadku tych warstw ich tekstura (wyrażona szerokością rozkładu kierunków
krystalograficznych, porównaj kształty pików Cu, IrMn i CoFe) zależy od rodzaju bufora.
Z figur biegunowych (Rys. 4.13) wynika, że rozkład orientacji krystalitów jest losowy w
płaszczyźnie próbki, okręgi świadczą o uporządkowanym wzroście krystalitów postaci
kolumn w kierunku prostopadłym do podłoża. Zmiana stopnia szarości okręgu jest miarą
rozkładu orientacji kierunków. Okręgi położone pod kątem ψ=70.5o pochodzą od rodziny
płaszczyzn Cu(111) i Ir Mn(111), okręgi od rodziny płaszczyzn CoFe (110) położone są pod
kątem ψ=60o. Najsilniejszy kontrast okręgu, czyli największy stopień steksturowania
(niezależny od rodzaju bufora poza przypadkiem bufora typu a), podobnie jak w przypadku
pomiaru ω, obserwujemy dla Cu(111). Natomiast słabszy kontrast szarości okręgów, a co za
tym idzie słabsze steksturowanie występuje dla IrMn(111 i CoFe (110). Obrazy punktowe na
figurze biegunowej CoFe(110) pochodzą od płaszczyzn Si(100), monokrystalicznego
podłoża. Ponieważ warstwy nanoszone były na gruby (ok. 1000 nm) amorficzny SiO2 nie
zachodzi epitaksjalny wzrost wymuszony podłożem.
Rys. 4.12. Pomiary ω dla położeń braggowskich pików Cu(111) (a), IrMn(111) (b) i CoFe(110) (c) dla złącz tunelowych z warstwą CoFe 15nm. Litery w legendzie rysunku oznaczają rodzaj bufora. Pomiary dla
bufora a w stosunku do b, c i d z powodu braku tekstury wykazują bardzo małą intensywność.
(a) (b) (c)

-85-
Rys. 4.13. Obrazy figur biegunowych dla próbek o różnych buforach a (a), b (b), c (c) i d (d) zmierzone na pikach Cu(111), IrMn(111) oraz CoFe(100).
4.7. Szorstkość interfejsów
4.7.1. Reflektometria
Z nisko-kątowego pomiaru θ-2θ poprzez dopasowanie programem WinGixa [91] firmy
Philips otrzymano, zebrane w tabeli (Tabela 4.1), grubości i szorstkości interfejsów (interface
roughness). Należy zwrócić uwagę, że założone do procesu nanoszenia grubości warstw są
zgodne w granicach błędu z dopasowanymi, najmniejsze szorstkości są dla bufora a,
największe dla b, bufory c i d przyjmują wartości pośrednie. Korelacja dużego stopnia
steksturowania z dużą amplitudą szorstkości interfejsu pochodzi z kolumnowego wzrostu
warstw, w kierunku prostopadłym do podłoża. Różnej wysokości kolumny indukują
pofalowanie interfejsu (szorstkości) jak to pokazuje zdjęcie przekroju poprzecznego złącza
tunelowego zrobione mikroskopem elektronowym.
Cu(111)
IrMn(111
CoFe(110
(a) (b) (c) (d)

-86-
1 2 3 4 5 6 7 8 910-1
100
101
102
103
104
105
106
107
108
pomiar dopasowanie
Natęż
enie
[im
p/s]
2θ [O]
1 2 3 4 5 6 7 8 910-1
100
101
102
103
104
105
106
107
108
pomiar dopasowanie
Natęż
enie
[im
p/se
c]
2θ [O]
1 2 3 4 5 6 7 8 910-1
100
101
102
103
104
105
106
107
108
pomiar dopasowanie
Natęż
enie
[im
p/s]
2θ [O]
1 2 3 4 5 6 7 8 910-1
100
101
102
103
104
105
106
107
108
pomiar dopasowanie
Natęż
enie
[im
p/s]
2θ [O]
Rys. 4.14. Pomiary reflektometryczne i dopasowania na próbkach o strukturze: podłoże/bufor/IrMn 12nm/Ta 5nm z czterema różnymi buforami. Bufor a (a), b (b), c (c) i d (d).
Tabela 4.1. Grubości i szorstkości Cu, IrMn i Ta otrzymane w wyniku dopasowań do profili
reflektometrycznych próbek: podłoże/bufor/IrMn 12nm/Ta 5nm. t: grubość warstwy, r: szorstkość. Cu – warstwa leżąca bezpośrednio pod IrMn; bufory: a, b – Cu 25nm, bufory: c, d – Cu 5nm.
bufor Cu IrMn Ta TaO
t [nm] r [nm] t [nm] r [nm] t [nm] r [nm] t [nm] r [nm] a 26.7 0.52 11.9 0.v59 4.9 0.43 2.1 0.44 b 27.0 0.95 11.9 1.03 4.8 0.83 2.1 0.85 c 5.3 0.70 11.5 0.90 4.8 0.78 2.1 0.77 d 5.3 0.57 11.5 0.74 4.8 0.58 2.1 0.63
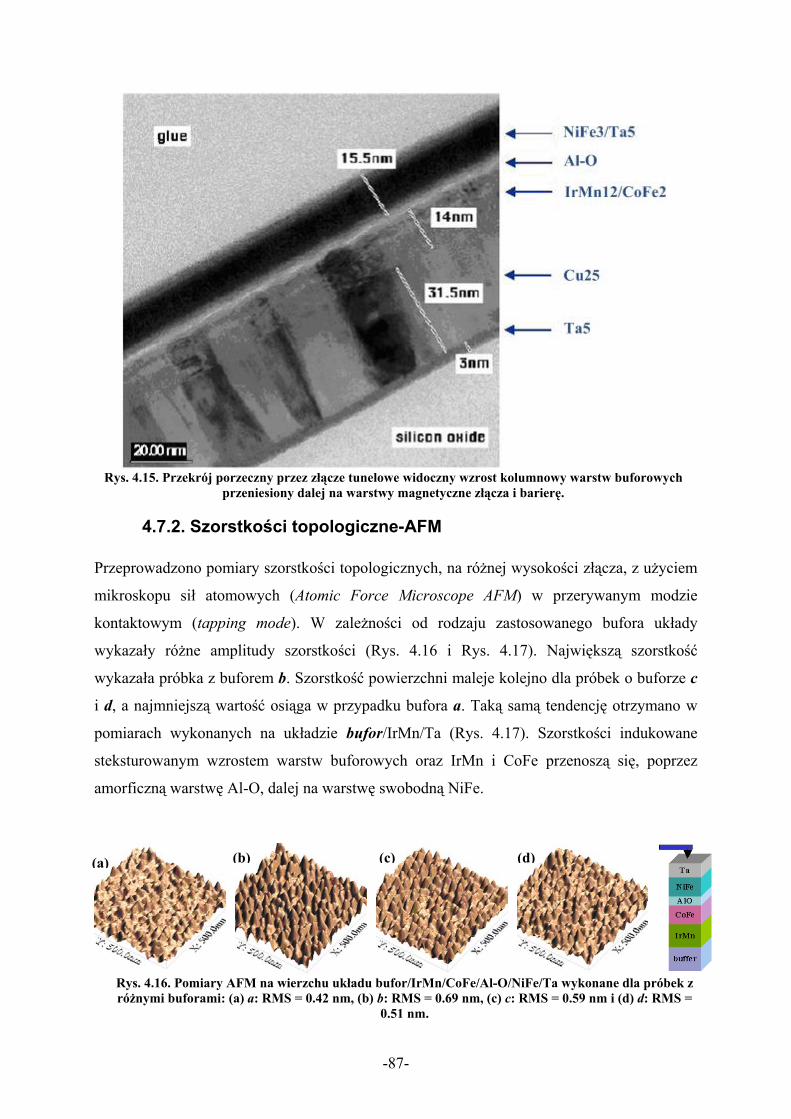
-87-
Rys. 4.15. Przekrój porzeczny przez złącze tunelowe widoczny wzrost kolumnowy warstw buforowych przeniesiony dalej na warstwy magnetyczne złącza i barierę.
4.7.2. Szorstkości topologiczne-AFM Przeprowadzono pomiary szorstkości topologicznych, na różnej wysokości złącza, z użyciem
mikroskopu sił atomowych (Atomic Force Microscope AFM) w przerywanym modzie
kontaktowym (tapping mode). W zależności od rodzaju zastosowanego bufora układy
wykazały różne amplitudy szorstkości (Rys. 4.16 i Rys. 4.17). Największą szorstkość
wykazała próbka z buforem b. Szorstkość powierzchni maleje kolejno dla próbek o buforze c
i d, a najmniejszą wartość osiąga w przypadku bufora a. Taką samą tendencję otrzymano w
pomiarach wykonanych na układzie bufor/IrMn/Ta (Rys. 4.17). Szorstkości indukowane
steksturowanym wzrostem warstw buforowych oraz IrMn i CoFe przenoszą się, poprzez
amorficzną warstwę Al-O, dalej na warstwę swobodną NiFe.
Rys. 4.16. Pomiary AFM na wierzchu układu bufor/IrMn/CoFe/Al-O/NiFe/Ta wykonane dla próbek z różnymi buforami: (a) a: RMS = 0.42 nm, (b) b: RMS = 0.69 nm, (c) c: RMS = 0.59 nm i (d) d: RMS =
0.51 nm.
(b) (c) (d)(a)

-88-
Rys. 4.17. Pomiary AFM na wierzchu układu bufor/IrMn/Ta wykonane dla próbek z różnymi buforami: (a)
a: RMS = 0.30 nm, (b) b: RMS = 0.61 nm, (c) c: RMS = 0.53 nm i (d) d: RMS = 0.42 nm.
Szorstkości topologiczne powierzchni mierzone metodą AFM doskonale korelują z szorstkościami interfejsowymi wyznaczonymi z pomiarów reflektometrycznych. Wynik ten potwierdza steksturowany, kolumnowy wzrost warstw aktywnych magnetycznie indukowany warstwami buforowymi.
0,3 0,4 0,5 0,6
0,6
0,7
0,8
0,9
1,0
b
c
aSzo
rstk
ość
XRD
[nm
]
Szorstkość AFM [nm]
d
Rys. 4.18. Korelacje pomiędzy szorstkościami otrzymanymi z pomiarów AFM i XRD – pomiar reflektometryczny. Litery oznaczają rodzaj bufora.
4.7.3. Wpływ szorstkości na parametry złącza tunelowego: HNéel i TMR
Przesunięcie pętli magnetorezystancyjnej (TMR) względem pola H=0 spowodowane jest
ferromagnetycznym sprzężeniem wymiennym (FP-S-FF) pomiędzy warstwą zamocowaną
(FP) CoFe poprzez barierę Al-O a warstwą swobodną (FF) NiFe. Jest to dipolowe sprzężenie
magnetostatyczne nazwane przez Néela orange peel (roz. 2.8).
Na rysunku (Rys. 4.19) zestawione zostały pętle magnetorezystancyjne zmierzone na
złączach o wymiarach 100μm×100μm otrzymane z przemagnesowania warstwy swobodnej.
Rysunek (Rys. 4.19) przedstawia pętle dla czterech próbek o różnych buforach z grubością
warstwy zamocowanej 2.5 nm. Bez względu na grubość warstwy zamocowanej pole HNéela
jest zawsze największe dla próbek z buforem b natomiast dla próbek z buforem a jest
najmniejsze. W przypadku buforów c i d pole Néela przyjmuje wartości pośrednie.
(b) (c) (d)(a)

-89-
-1 0 1 2 3 4 50
10
20
30
40
50 a b c d
TMR
[%]
H [kA/m]
t CoFe = 2.5nm
Rys. 4.19. Pętle TMR na złączach Si(100)/SiOx/bufor/IrMn 12nm/CoFe t/Al-O 1.4nm/NiFe 3nm/ Ta 5nm/Cu 30nm/Ta 3nm/Au 25nm o rozmiarze 100μm×100μm dla próbek z grubością CoFe 2.5 nm.
Wpływ grubości warstwy zamocowanej na sprzężenie HS dla różnych typów buforów
przedstawiony został na rysunku (Rys. 4.20). Linie ciągłe odpowiadają teoretycznemu
dopasowaniu dla serii próbek z buforem a i b do wyników eksperymentalnych przy użyciu
zależności (8-6), dla których przyjęto:
– z pomiarów szorstkości AFM – dla bufora a: h = 0.4 nm, dla bufora b: h = 0.7 nm,
– z pomiaru AFM – λ = 50 nm – średnia odległość pomiędzy pagórkami (taka sama dla
bufora a i b).
– namagnesowanie warstwy CoFe: MP = 1.65×106 A/m,
– technologiczne grubości poszczególnych warstw.
Wyraźnie widać wzrost pola Néela wraz z grubością warstwy zamocowanej. Ponadto
otrzymane wyniki potwierdzają wpływ amplitudy szorstkości na wartość pola HS. Dla silnie
steksturowanych próbek (bufor b), gdzie szorstkości są największe, pole Néela jest
największe, natomiast najmniejsze dla słabo steksturowanych próbek z buforem a, dla których
szorstkość była mała.

-90-
2 4 6 8 10 12 14 160
2
4
6
8
10
12
14 a b c d
HS [k
A/m
]
t CoFe [nm]
Rys. 4.20. Pole Néela w funkcji grubości warstwy FP CoFe. Linie obliczone na podstawia wzoru (8-6) dla buforów a i b.
Rysunek (Rys. 4.21) przedstawia wykres zależności TMR w funkcji zmieniającej się grubości
warstwy zamocowanej CoFe. W przypadku bufora a wartość TMR utrzymuje się na
podobnym poziomie w zależności od grubości warstwy CoFe. Dla bufora b wielkość TMR
maleje wraz ze wzrostem grubości warstwy CoFe.
2 4 6 8 10 12 14 160
10
20
30
40
50
a b c d
TMR
[%]
t CoFe [nm]
Rys. 4.21. Rezultaty pomiarów TMR dla różnych buforów w funkcji grubości warstwy CoFe. Wstawione linie wskazują trend dla wartości TMR dla bufora a i b.
Duży rozrzut punktów pomiarowych wartości TMR nie pochodzi od błędu pomiaru, ale
przyczyną jego jest jakość bariery tunelowej, jej niejednorodność i stopień zdefektowania
[92]. Dla złącz „gładkich” wytworzonych na buforze a w szerokim zakresie grubości dolnej
elektrody (warstwy FP=CoFe) TMR jest stały, natomiast dla złącz „szorstkich”
wytworzonych na buforze b maleje z grubością elektrody dolnej (CoFe). Świadczy to o tym,

-91-
że pofałdowana (o niestałej grubości) bariera powoduje niejednorodny rozkład prądu
tunelowego.
4.8. Złącze tunelowe z barierą MgO Pierwsze magnetyczne złącza tunelowe z amorficzną barierą tunelową Al-O, które wykazały
stosunkowo dużą zmianę przyrostu tunelowej magnetorezystancji w temperaturze pokojowej
opublikowali niezależnie w 1995 roku Moodera (CoFe/Al2O3/Co, TMR = 11.8%) [93] i
Miyazaki (CoFe/Al2O3/NiFe, TMR = 18% [94]. Od tego czasu datuje się wyścig nad
opracowaniem technologii wytworzenia złącza o jak największym przyroście TMR (Rys.
4.22), w którym biorą udział czołowe firmy specjalizujące się w nanoelektronice i
uniwersyteckie instytuty badawcze.
Podstawową warstwą dobrego złącza jest bariera tunelowa. Doskonalenie procesu utleniania
aluminium doprowadziło tylko do pięciokrotnego wzrostu TMR≈65% od czasu wytworzenia
w 1995 roku pierwszego złącza z barierą Al-O.
Rys. 4.22. Wzrost przyrostu tunelowej magnetorezystancji w złączach tunelowych z barierą Al-O i MgO
(001) w czasie od 1994 do 2004 i od 1994 do 2008
Po opublikowaniu w 2001 roku prac teoretycznych, w których autorzy na podstawie obliczeń
struktury pasmowej z pierwszych zasad pokazali, że w epitaksjalnym układzie
Fe(001)/MgO(001)/Fe(001) możliwy jest TMR≈1000% [95,96]. Wkrótce potem Yuasa
otrzymal TMR = 180% dla monokrystalicznego układu Fe(001)/MgO(001)/Fe(001)
wytworzonego techniką MBE (molecular beam epitaxy) [97], natomiast Parkin dla układu
CoFe/MgO(001)/CoFe wytworzonego metodą sputteringu otrzymał 220% [98] udowadniając,
że wystarczy polikrystaliczna stesksturowana bariera MgO(001) (nie musi być użyty
epitaksjalny wzrost warstw), aby otrzymać wysoki TMR.

-92-
Najlepszy wynik jaki został opublikowany dla złącza tunelowego typu pseudo spin-valve
(PSV) Co20Fe60B20/MgO(001)/Co20Fe60B20 w temperaturze pokojowej to TMR = 604% [99], a
dla złącza z podwójną barierą /MgO/Co40Fe40B20/MgO/Co40Fe40B20 uzyskano 1056% [100].
Choć eksperymenty te pokazały, że zgodnie z przewidywaniami teorii krystaliczna,
steksturowana w kierunku (001) bariera MgO daje gigantyczny przyrost TMR, to
najistotniejszy dla zastosowań jest wysoki TMR przy małej rezystancji powierzchniowej (RA
product), aby przez złącze mógł płynąć prąd o dużej gęstości. Są to konieczne warunki dla
złącz TMR pracujących jako komórki pamięci STT-RAM lub STT-oscylatory [101].
Przykładowe wykresy zależności TMR od rezystancji powierzchniowej (RA) dla bariery
Al-O i MgO przedstawiono na rysunku 4.25. Jak wynika z wykresu (Rys. 4.25 a) amorficzna
bariera Al-O ma znacznie gorsze parametry niż krystaliczna bariera MgO (Rys.4.25 b) o
około dwa rzędy wielkości (np. TMR (Al-O) = 73%; RA (Al-O) = 3 kΩμm2 TMR (MgO) =
73%; RA (MgO) = 3Ωμm2). Ostatnio opublikowane dane dla bariery MgO wyrastającej na
podgrzewanym podłożu (Rys. 4.24) pokazują, że można uzyskać dobrze wykrystalizowaną
barierę MgO(001) o grubości 1 nm dla której TMR = 170% i RA = 1 Ωμm2, takie parametry
gwarantują bardzo dobrą perspektywę skalowalności komórek pamięci złącz tunelowych w
pamięciach STT-RAM [102].
Rys. 4.23. Zależność TMR od rezystancji powierzchniowej (RA product) dla bariery Al-O (a) i MgO w ramkach podane rozmiary złącza (b). Bariery wytwarzano techniką sputteringu w różnych warunkach
utleniania (niepublikowane dane z prezentacji firmy Singulus AG).

-93-
Rys. 4.24. Zależność TMR od rezystancji powierzchniowej (RA product) dla bariery MgO nanoszonych
techniką sputteringu na podgrzewane podłoże [102].
Wytworzono w laboratorium firmy Singulus AG na aparaturze Timaris złącza tunelowe z
barierą MgO o następującej strukturze warstwowej: Ta(5)/CuN(50)/Ta(3)/CuN(50)/Ta(3)/
PtMn(16)/Co70Fe30(2)/Ru(0.9)/Co40Fe40B20(2.3)/zmienna grubość bariery MgO(0.6–1)/
Co40Fe40B20(2.3)/ Ta(10)/CuN(30)/Ru(7) (w nawiasach grubości w nanometrach).
Rys. 4.25. Przekrój poprzeczny struktury warstwowej złącza tunelowego w technice mikroskopu
skaningowego (SEM – scannig electron microscopy) wraz z identyfikacją EDX (energy dispersive X-Ray) materiałową poszczególnych warstw (prof. S. Van Dijken i dr. Lide Yao, Aalto Unversity, Helsinki).
Jak widać na obrazku przekroju poprzecznego, warstwy są bardzo wyraźnie rozróżnialne
jedna od drugiej, dość gładkie o ostrych interfejsach (brak dyfuzji międzywarstwowej),
wzrost warstw buforowych (Ta i CuN) nie charakteryzuje się teksturą kolumnową. Zdjęcie

-94-
wysoko rozdzielcze (HRTEM – high resolution transition electron microscopy) (Rys. 4.26)
identyfikuje bardzo dobrze steksturowaną w kierunku (001) polikrystaliczną warstwę bariery
MgO i lokalnie wykrystalizowane homoepitaksjalnie krystality, na przemian z
pozostałościami fazy amorficznej od górnej i dolnej warstwy CoFeB. Jak widać wygrzewanie
w próżni przez dwie godziny w temperaturze 360oC skutkuje niejednorodnym procesem
krystalizacji amorficznych elektrod CoFeB, dlatego proces ten w celu poprawy parametrów
złącza należy dopracować. Natomiast powierzchnie warstwy MgO są atomowo gładkie, gdyż
dolne warstwy, przede wszystkim wielowarstwowy układ warstw buforowych
Ta(5)/CuN(50)/Ta(3)/CuN(50)/Ta(3)/, jest krystalograficznie nieuporządkowany dzięki
czemu brak szorstkości na interfejsach.
Rys. 4.26. Wysokorozdzielcze zdjęcie z mikroskopu elektronowego polikrystalicznej bariery MgO(001) z homepitaksjalnie wykrystalizowaną fazą (001)bcc CoFe, widoczna również amorficzna faza CoFeB.
Dyfrakcja punktowa MgO(001) i bcc (100) CoFe. Problem krystalizacji ferromagnetycznych warstw CoFeB nad i pod warstwą MgO
przebadano metodą θ-2θ dyfrakcji rentgenowskiej. Badania prowadzono na układach
warstwowych złącza typu pseudo zawór spinowy PSV i układach warstwowych złącza
exchange-bias zawór spinowy EB-SV (Rys. 4.27). W przypadku PSV dolna warstwa CoFeB
wyrastała na cienkiej warstwie Ta, a w przypadku EB-SV na cienkiej warstwie Ru. CoFeB na
Ru krystalizowało do fazy bcc (110) a na Ta do bcc (200), a więc w kierunku zgodnym z
MgO(001) (Rys. 4.28). Jednorodnie wykrystalizowany układ CoFeB(001)/MgO(001)/
CoFeB(001) dla stosu warstwowego typu PSV w przeciwieństwie do niejednorodnie
fazowego CoFeB(110)/MgO(001)/CoFeB(001) dla EB-SV skutkuje, większym TMR = 240%
w przypadku PSV mniejszym TMR = 180% dla EB-SV (Rys. 4.29). Podobne zachowanie

-95-
(zawsze większy TMR) dla struktury warstwowej PSV niż dla EB-SV zaobserwowano w
pracy [99].
P-SV EB-SV
bottom top bottom top
SubstrateTa 50
Ru 180
Ta 30CoFeB 150
MgO 13.5Ta 50
SubstrateTa 50
Ru 180
Ta 30CoFeB 150
MgO 13.5Ta 50
SubstrateTa 50
Ru 180
Ta 30CoFeB 30MgO 13.5
CoFeB 150Ru 50Ta 50
SubstrateTa 50
Ru 180
Ta 30CoFeB 30MgO 13.5
CoFeB 150Ru 50Ta 50
SubstrateTa 50
Ru 180
Ta 30
PtMn 200
CoFe 20Ru 9
CoFeB 150Ta 50
SubstrateTa 50
Ru 180
Ta 30
PtMn 200
CoFe 20Ru 9
CoFeB 150Ta 50
SubstrateTa 50
Ru 180
Ta 30
PtMn 200
CoFe 20Ru 9
CoFeB 30MgO 13.5
CoFeB 150Ru 50Ta 50
SubstrateTa 50
Ru 180
Ta 30
PtMn 200
CoFe 20Ru 9
CoFeB 30MgO 13.5
CoFeB 150Ru 50Ta 50
Rys. 4.27. Układy warstwowe do badań XRD typu pseudo zawór spinowy PSV i exchange-bias EB-SV. Należy zwrócić uwagę, że dolne (bottom) elektrody CoFeB na Ta w przypadku PSV, na Ru w przypadku
EB-SV.
30 40 50 60 70 80 90 100
100
1000
10000
Ta(2
20)
Ta(1
10)
PtM
nfct
(222
)
Ru(
004)
Ru(
002)
PtM
nfct
(111
)
CoF
eB(1
10)
annealed@380EB-SV
bottom top
P-SV bottom top
Inte
nsity
(cou
nts)
2 θ (°)
CoF
eB(2
00)
Rys. 4.28. Profile θ-2θ w szerokim zakresie kątowym. Widoczne dobrze wykrystalizowane warstwy:
antyferromagnetyka PtMn, grube buforowe Ru, CoFeB(110) na cienkim Ru (tylko EB-SV) i CoFeB (002) na cienkim Ta (tylko PSV)

-96-
-100 -50 0 50 1000
40
80
120
160
200
240
RA = 28 (kΩμm2)
TMR
(%)
H (Oe)
3x12 μm2
PSV
-100 -50 0 50 1000
30
60
90
120
150
180
RA = 25 (kΩμm2)
3x8 μm2
TMR
(%)
H (Oe)
EB-SV
Rys. 4.29. TMR dla złącza PSV i EB-SV zmierzone dla układów warstwowych z Rys. 4.27.
Przeglądowa praca Yuasa i Djayaprawira omawia bardzo szczegółowo wpływ technologii
wytwarzania krystalicznej bariery MgO(001) na parametry złącza z elektrodami CoFeB [103].
[90] B. C. Cullity, Podstawy dyfrakcji promieni rentgenowskich, PWN, Warszawa (1964)
[91] PHILIPS WinGixa Version V1.102 (03-Nov-1998), Software for Philips diffractometers
Instructions
[92] J. Kanak, “Dyfrakcja rentgenowska na układach wielowarstwowych – metody pomiaru i
modele”, rozprawa doktorska, AGH Kraków 2006
[93] J. S. Moodera, L. R. Kinder, T. M. Wong, R. Meservey, Large Magnetoresistance at
Room Temperature in Ferromagnetic Thin Film Tunnel Junctions, Phys. Rev. Lett. 74 (1995)
3273
[94] T. Miyazaki, N. Tezuka, Giant magnetic tunneling effect in Fe/Al2O3/Fe junction, Journal
of Magnetism & Magnetic Materials 139, (1995) L231
[95] W. H. Butler, X.-G. Zhang, T. C. Schulthess, J.M.MacLaren, Spin-dependent tunneling
conductance of Fe|MgO|Fe, Phys. Rev. B, Condens. Matter, 63, no. 5, (2001) 054416
[96] J. Mathon, A. Umerski, Theory of tunneling magnetoresistance of an epitaxial
Fe/MgO/Fe(001) junction, Phys. Rev. B, Condens. Matter, 63, no. 22, (2001) 220403
[97] S. Yuasa, T. Nagahama, A. Fukushima, Y. Suzuki, K. Ando, Giant room-temperature
magnetoresistance in single-crystal Fe/MgO/Fe magnetic tunnel junctions, Nat. Mater., 3, no.
12, (2004) 868
[98] S. S. P. Parkin, C. Kaiser, A. Panchula, P. M. Rice, B. Hughes, M. Samant, S.-H. Yang,
Giant tunneling magnetoresistance at room temperature with MgO (100) tunnel barriers, Nat.
Mater., 3, no. 12, (2004) 662

-97-
[99] S. Ikeda, J. Hayakawa, Y. Ashizawa, Y. M. Lee1, K. Miura, H. Hasegawa, M. Tsunoda,
F. Matsukura, H. Ohno, Tunnel magnetoresistance of 604% at 300 K by suppression of Ta
diffusion in CoFeB/MgO/CoFeB pseudo-spin-valves annealed at high temperature, Appl.
Phys. Lett. 93, (2008) 082508
[100] L. Jiang, H. Naganuma, M. Oogane, Y. Ando, Large Tunnel Magnetoresistance of
1056% at Room Temperature in MgO Based Double Barrier Magnetic Tunnel Junction,
Applied Physics Express 2 (2009) 083002
[101] R. Takemura., T. Kawahara, Fellow, IEEE, K. Miura, H. Yamamoto, J. Hayakawa, N.
Matsuzaki, K. Ono, M. Yamanouchi, K. Ito, H. Takahashi, S. Ikeda, H. Hasegawa, H.
Matsuoka, H. Ohno, A 32-Mb SPRAM With 2T1R Memory Cell, Localized Bi-Directional
Write Driver and ‘1’/‘0’ Dual-Array Equalized Reference Scheme, IEEE Journal of Solid-
State Circuits, 45, no. 4, april 2010, 869
[102] H. Maehara, K. Nishimura, Y. Nagamine, K. Tsunekawa, T. Seki, H. Kubota, A.
Fukushima, K. Yakushiji, K. Ando, S. Yuasa, Tunnel Magnetoresistance above 170% and
Resistance–Area Product of 1Ω (μm)2 Attained by In situ Annealing of Ultra-Thin MgO
Tunnel Barrier, Applied Physics Express 4 (2011) 033002
[103] S. Yuasa, D. D. Djayaprawira, Giant tunnel magnetoresistance in magnetic tunnel
junctions with a crystalline MgO(0 0 1) barrier, J. Phys. D: Appl. Phys. 40 (2007) R337

-98-

-99-
5. Aparatura do pomiarów charakterystyk magnetycznych i elektrycznych
5.1. Magnetometr R-VSM
Cienkie warstwy magnetyczne metali ferromagnetycznych, dyskutowane w tej książce,
nanoszono najczęściej na diamagnetyczne podłoża krzemowe lub paramagnetyczne szkło,
gdzie stosunek objętości materiału ferromagnetycznego jest wielokrotnie mniejszy od
objętości podłoża. Tego typu próbki wymagają bardzo czułych urządzeń do pomiaru pętli
histerezy magnetycznej. Prezentowane w tej pracy pętle histerezy namagnesowania mierzono
za pomocą rezonansowego magnetometru wibracyjnego R-VSM (Resonance Vibrating
Sample Magnetometer) opublikowanego w pracach [104, 105].
Rys. 5.1. Rezonansowy magnetometr wibracyjny R-VSM z cewkami Helmholtza, przeznaczony do
pomiarów w małym polu magnetycznym ( do 12 mT).
Rys. 5.2. Rezonansowy magnetometr wibracyjny R-VSM z elektromagnesem, przeznaczony do pomiarów
w dużym polu magnetycznym (do 0.8 T).

-100-
W magnetometrze R-VSM szklany pręt pobudzany jest do drgań przez element
piezoelektryczny. Na końcu pręta zamocowana jest badana próbka cienkowarstwowa, która
drga wzdłuż osi łączącej cewki zbierające.
Napięcie na cewkach zbierających proporcjonalne jest do zmian strumienia magnetycznego
pochodzącego od próbki:
( )( ) ( )( ) ( ) Sdt
tdxtxBSdt
txdBdtdU N
Nind
'===φ
, (5-1)
gdzie BN jest składową indukcji magnetycznej normalną do powierzchni cewek, S jest
powierzchnią przekroju poprzecznego cewek, x(t) =x0+AXsin(ωt) jest położeniem próbki w
czasie. Rozwijając BN'(x(t)) w szereg wokół położenia spoczynkowego x0 otrzymać można:
( ) ( ) ⎥⎦⎤
⎢⎣⎡ +≈ tAxBtxBSAU XNNXind ωωω 2sin
21cos 0
''0
' . (5-2)
W połowie pręta znajduje się płytkowy pojemnościowy czujnik położenia, w którym pręt
(pośrodku pometalizowany) stanowi trzecią elektrodę. Generator dostarcza sygnał 50 kHz,
który modulowany jest wychyleniem pręta. Na wyjściu z czujnika otrzymujemy napięcie
referencyjne proporcjonalne do drgań pręta.
Rys. 5.3. Widok z góry głowicy pomiarowej R-VSM z pojemnościowym czujnikiem położenia pręta a)
elektryczny schemat zastępczy pojemnościowego czujnika położenia pręta b).
Selektywny nanowoltomierz homodynowy lock-in, synchronizowany sygnałem
referencyjnym, mierzy wyłącznie amplitudę sygnałów o częstości ω:
( )0' xBSAU Xind ⋅= ω . (5-3)

-101-
B'(x0) zależy od czynników geometrycznych takich jak odległość pomiędzy cewkami i kształt
próbki, oraz od momentu magnetycznego próbki. Wyznaczenie momentu magnetycznego
nieznanej próbki możliwe jest po wycechowaniu magnetometru za pomocą próbki wzorcowej
o takim samym kształcie. W przypadku cienkich warstw jako próbkę wzorcową stosujemy
cienką folię, na przykład Ni. Ponieważ częstotliwość rezonansowa i amplituda drgań zależą
od masy próbki, w trakcie pomiaru w każdym kroku zadanego pola magnetycznego mierzona
jest częstotliwość ω i amplituda A sygnału referencyjnego.
Pręt doprowadzany jest do drgań w pobliżu swojej częstotliwości rezonansowej (stąd nazwa
urządzenia) co pozwala na uzyskanie dużej amplitudy drgań pręta przy małej mocy
dostarczanej do układu. Parametry geometryczne pręta dobrano tak by częstotliwość
rezonansowa pręta wynosiła około 75Hz, co pozwala na włączenie filtrów 50Hz i 100Hz
odcinających przydźwięk sieci w nanowoltomierzu lock-in.
Czułość urządzenia, rzędu 10-4 emu, i zdolność rozdzielcza pola magnetycznego 0.01 Oe,
pozwalają na pomiar bardzo cienkich warstw magnetycznych, nawet gdy sygnał magnetyczny
jest mniejszy od sygnału para lub diamagnetycznego pochodzącego od podłoża warstwy. W
tej sytuacji konieczny jest jednak pomiar czystego podłoża w celu uzyskania sygnału od
badanej warstwy jako różnicy pomiędzy sygnałem z układu próbka+podłoże a sygnałem od
czystego podłoża [105].
Ograniczeniem zastosowań urządzenia R-VSM jest masa próbki mocowana na końcu pręta,
próbka musi być mała i lekka w stosunku do masy pręta, aby częstość rezonansowa w trakcie
pomiaru była stała. Metody pomiarów magnetycznych stosowanych w fizyce, testowaniu
materiałów i w technice dla różnego rodzaju próbek zostały szczegółowo opisane w
przeglądowej pracy [106].
5.2. Magnetometr efektu Kerra
Magnetooptyczny efekt Kerra (Magnetoptical Kerr Effect MOKE) polega na niewielkim
(rzędu minut) skręceniu kąta polaryzacji liniowo spolaryzowanego światła, odbitego od
warstwy magnetycznej. W wyniku oddziaływania z namagnesowaniem warstwy rozróżniamy
polarny, poprzeczny i podłużny efekt Kerra [107].
Polarny efekt Kerra polega na oddziaływaniu liniowo spolaryzowanego światła, padającego
na warstwę pod kątem α=0, z namagnesowaniem skierowanym prostopadle do płaszczyzny
warstwy. Natomiast podłużny i poprzeczny efekt Kerra występuje gdy światło pada pod

-102-
kątem α a jego płaszczyzna padania jest równoległa lub prostopadła do wektora
namagnesowania, leżącego w płaszczyźnie warstwy.
W wyniku tego oddziaływania występuje przejście od polaryzacji liniowej światła padającego
do polaryzacji eliptycznej światła odbitego, charakteryzującej się kątami skręcenia Kerra ΘK i
eliptyczności εK.
Kąty te zależą od stałych materiałowych wiążących tensor przenikalności elektrycznej z
wektorem magnetyzacji [108].
Rys. 5.4. Konfiguracje efektu Kerra: a) - polarny efekt Kerra, b) – podłużny i c) poprzeczny efekt Kerra.
Rys. 5.5. Konfiguracja układu optycznego w podłużnym efekcie Kerra.
L
P
W
S
HC
Pr
35°
L - laser HeNe, 633 nm; 5,2mWP - polaryzatorPr - badana próbkaH - cewki HelmholtzaS - soczewka skupiająca ( f=60 mm )W - pryzmat Wollaston’aD1,D2 - fotodiody
C
D1D2

-103-
Rys. 5.6. Magnetometr Kerra
Pomiar podłużnego efektu Kerra wygląda następująco. Wiązka światła laserowego (L) o
mocy 4 mW i długości fali 670 nm po przejściu przez polaryzator liniowy (P) pada na
powierzchnię próbki pod kątem α około 35o. Po odbiciu się od próbki umieszczonej w polu
magnetycznym równoległym do płaszczyzny warstwy spolaryzowane eliptycznie światło
przechodzi przez pryzmat Wollastona (W), który rozszczepia wiązkę światła na dwie
symetryczne spolaryzowane liniowo wiązki, których płaszczyzny polaryzacji są do siebie
prostopadłe. Po zogniskowaniu przez soczewkę (S) wiązki padają na fotodiody detekcyjne
(D), podłączone do wzmacniacza różnicowego [104, 108]. Zmiana kąta ΘK powoduje zmianę
różnicy intensywności obu rozszczepionych wiązek światła. Pomiar pętli histerezy efektu
Kerra polega więc na pomiarze napięcia na detektorze, proporcjonalnego do kąta skręcenia
płaszczyzny polaryzacji, w funkcji pola magnetycznego.
Podstawową różnicą pomiędzy tym pomiarem, a opisywanym poprzednio pomiarem z
użyciem magnetometru R-VSM jest lokalność metody - pomiar pochodzi tylko z miejsca
gdzie pada wiązka światła, a ponadto głębokość wnikania wiązki w warstwę jest niewielka
(dla fali świetlnej o długości λ=670 nm głębokość wnikania wynosi ok. 20 nm) [109].

-104-
μ0H [mT]-25 -20 -15 -10 -5 0 5
J [T
]
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
Rot
acja
[min
]
-0.3
-0.2
-0.1
0.0
0.1
0.2
0.3
KerrR-VSM
a
Rys. 5.7. Porównanie pętli histerezy magnetycznej z pomiaru R-VSM i MOKE. Pętla histerezy MOKE
od dolnej warstwy Co ma mniejsza wysokość niż górna z powodu częściowej absorpcji światła, w przypadku R-VSM są równe, gdyż nie ma straty sygnału.
Jest to jednocześnie zaletą i wadą - zaletą ponieważ w przypadku padania wiązki od
powietrza zbyteczne staje się odejmowanie sygnału podłoża od sygnału użytecznego, wadą -
ponieważ w przypadku złożonego układu wielowarstwowego uzyskana informacja może być
niepełna przez ograniczoną głębokość wnikania.
Z drugiej strony, lokalność metody opartej na efekcie Kerra umożliwia uzyskanie informacji o
strukturze domenowej i rozkładzie namagnesowania na powierzchni próbki. W tym celu
wykorzystujemy kontrast skręcenia polaryzacji Kerra porzez zastosowanie polaryzacyjnego
mikroskopu optycznego [107, 110, 111].
Na rysunku (Rys. 5.7) porównano pomiar z magnetometru R-VSM z pomiarem
magnetometru MOKE, zgodnie ze strukturą warstwową zaworu spinowego, w której
wyróżniamy dwie warstwy Co o tej samej grubości, górna zamocowana (dlatego przesunięta
oddziaływaniem exchange bias rozdz. 2.7), dolna swobodna mają w pomiarze R-VSM pętle
histerezy tej samej wielkości, natomiast w pomiarze MOKE warstwa Co położona głębiej ma
pętle histerezy mniejszą na skutek absorpcji światła. Należy zwrócić uwagę, ze pomiar pętli
histerezy z wykorzystaniem efektu Kerra nie „fałszuje” pól przełączania.
5.3. Pomiar magnetorezystancyjnej pętli histerezy i charakterystyk prąd - napięcie
Struktury wielowarstwowe złącza tunelowego lub magnetorezystancyjne (np. zawór spinowy
GMR) odpowiednio przygotowane do pomiarów elektrycznych (wykonane doprowadzenia
(elektrody) i zminiaturyzowane w procesie litografii (rozdz. 3.4 i 3.5)), są poddane pomiarom

-105-
charakterystyk: prąd-napięcie (I(V)) oraz zmiana rezystancji w funkcji zewnętrznego pola
magnetycznego (magnetorezystancyjna pętla histerezy).
W przypadku struktur typu GMR rezystancja może być mierzona w konfiguracji prąd
prostopadle skierowany do próbki (CPP – current perpendicular to plane) lub w płaszczyźnie
próbki (current in plane CIP). W konfiguracji CPP, którą praktycznie wykorzystuje się tylko
w badaniach efektu przełączania magnetyzacji prądem spolaryzowanych elektronów (current
induced magnetization switching – CIMS), GMR jest kilkakrotnie mniejszy niż w konfiguracji
CIP [111].
W złączach tunelowych rezystancja mierzona jest w konfiguracji CPP. Z pomiarów TMR
można wyznaczyć polaryzację spinową ferromagnetycznych elektrod (wzór 2-56), której
wartość jest istotna do optymalizacji materiałowej złącz tunelowych w celu uzyskania jak
największego przyrostu tunelowej magnetorezystancji. Natomiast z krzywych prąd-napięcie
można badać wpływ napięcia polaryzacji złącza na wartość przebicia, na TMR, można
określić odpowiedni punkt pracy złącza w zależności od powierzonej mu funkcji.
Rys. 5.8. Schemat układu pomiarowego magnetorezystancyjnej pętli histerezy.
Schemat układ do pomiaru magnetorezystancyjnych pętli histerezy jest przedstawiony na
rysunku (Rys. 5.8). Badana próbka umieszczona jest w cewkach pola magnetycznego (lub
elektromagnesie). Podobnie jak w poprzednich rozwiązaniach, wartość pola magnetycznego
jest kontrolowana przez sterowany zasilacz stałoprądowy. Pole to które jest mierzone za
pomocą wykalibrowanej sondy Halla przez gausomierz. Kontakt elektryczny z próbką
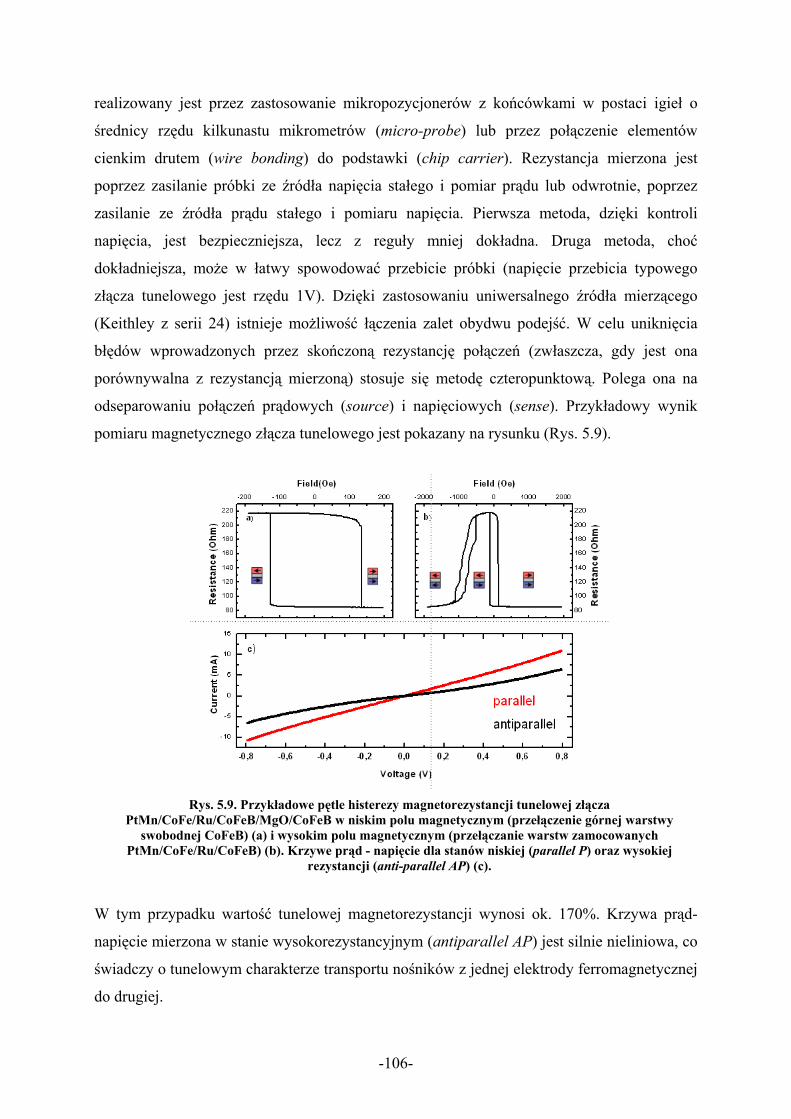
-106-
realizowany jest przez zastosowanie mikropozycjonerów z końcówkami w postaci igieł o
średnicy rzędu kilkunastu mikrometrów (micro-probe) lub przez połączenie elementów
cienkim drutem (wire bonding) do podstawki (chip carrier). Rezystancja mierzona jest
poprzez zasilanie próbki ze źródła napięcia stałego i pomiar prądu lub odwrotnie, poprzez
zasilanie ze źródła prądu stałego i pomiaru napięcia. Pierwsza metoda, dzięki kontroli
napięcia, jest bezpieczniejsza, lecz z reguły mniej dokładna. Druga metoda, choć
dokładniejsza, może w łatwy spowodować przebicie próbki (napięcie przebicia typowego
złącza tunelowego jest rzędu 1V). Dzięki zastosowaniu uniwersalnego źródła mierzącego
(Keithley z serii 24) istnieje możliwość łączenia zalet obydwu podejść. W celu uniknięcia
błędów wprowadzonych przez skończoną rezystancję połączeń (zwłaszcza, gdy jest ona
porównywalna z rezystancją mierzoną) stosuje się metodę czteropunktową. Polega ona na
odseparowaniu połączeń prądowych (source) i napięciowych (sense). Przykładowy wynik
pomiaru magnetycznego złącza tunelowego jest pokazany na rysunku (Rys. 5.9).
Rys. 5.9. Przykładowe pętle histerezy magnetorezystancji tunelowej złącza
PtMn/CoFe/Ru/CoFeB/MgO/CoFeB w niskim polu magnetycznym (przełączenie górnej warstwy swobodnej CoFeB) (a) i wysokim polu magnetycznym (przełączanie warstw zamocowanych
PtMn/CoFe/Ru/CoFeB) (b). Krzywe prąd - napięcie dla stanów niskiej (parallel P) oraz wysokiej rezystancji (anti-parallel AP) (c).
W tym przypadku wartość tunelowej magnetorezystancji wynosi ok. 170%. Krzywa prąd-
napięcie mierzona w stanie wysokorezystancyjnym (antiparallel AP) jest silnie nieliniowa, co
świadczy o tunelowym charakterze transportu nośników z jednej elektrody ferromagnetycznej
do drugiej.

-107-
Zadając z elektromagnesu duże pole magnetyczne można przełączyć układ warstw
zamocowanych FP: PtMn/CoFe/Ru/CoFeB (Rys. 5.9b). Przełączanie ma wtedy charakter
dwustopniowy: w małym polu przełącza się warstwa swobodna (jest to warstwa detekcyjna
wykorzystywana w aplikacjach), w dużym układ warstw zamocowanych.
[104] J. Wrona, „Magnetometria struktur cienkowarstwowych”, rozprawa doktorska, AGH
Kraków 2002
[105] J. Wrona, M. Czapkiewicz, T.Stobiecki, Magnetometer for the measurements of the
hystersis loop for ultra thin magnetic layers, J. Magn. Magn. Mat., 196 (1999) 935
[106] S. Tumańsk, Handbook of Magnetic Measurements, Published 23rd June 2011, CRC
Press
[107] A. Hubert, R. Schafer, Magnetic Domains The Analysis of Magnetic Micrustructures,
Springer –Verlag Berlin Heidelberg 1998
[108] J. Wrona, T. Stobiecki, R. Rak, M. Czapkiewicz, F. Stobiecki, L. Uba, J. Korecki, T.
Ślęzak, J. Wilgocka-Ślęzak, M. Roots, Kerr magnetometer based on differential amplifier,
phys. stat. sol., 196, No 1 (2003) 161
[109] J. Wrona, T. Stobiecki, M. Czapkiewicz, R. Rak, T. Ślęzak, J. Korecki, C. G. Kim, R-
VSM and MOKE magnetometers for nanostructures, J. Magn. Magn. Mat., 272-276, P3
(2004) 2294
[110] J. A.C. Bland, B. Henrich, Ultrathin Magnetic Structures III, Springer – Verlag, Berlin
Heidelberg 2005
[111] M. Żołądź, „Komputerowa obróbka obrazów magnetycznych struktur domenowych”,
rozprawa doktorska, AGH, Kraków 2006

-108-

-109-
6. Symulacje numeryczne
6.1. Model jednodomenowy
6.1.1. Stan układu jako lokalne minimum energii
W przyrodzie każdy układ dąży do osiągnięcia lokalnego minimum energii, a jeśli będzie się
znajdował w tym minimum, pozostanie w nim w równowadze stabilnej tak długo, jak długo
nie zmieni się jego całkowita energia. Podobnie zachowuje się wektor namagnesowania w
ferromagnetyku – jego zwrot i kierunek, determinowany przez energię związaną z
zewnętrznym polem magnetycznym oraz własnościami ferromagnetyka określonymi jego
uporządkowaniem wewnętrznym czyli energią anizotropii - będzie dążyć do spełnienia
warunku lokalnego minimum energetycznego. Jeśli lokalne minimum nie jest minimum
globalnym, to wektor namagnesowania może mieć np. dwa alternatywne kierunki – jest to
przyczyną tzw. histerezy ferromagnetycznej.
6.1.2. Gęstość energii w warstwie ferromagnetycznej - prosty model jednodomenowy
Iloczyn pola magnetycznego H [A/m] oraz indukcji namagnesowania μ0M [T≡kg/(A⋅s2)] ma
wymiar gęstości energii [J/m3]. Całkowita gęstość energii ferromagnetyka jest sumą energii
oddziaływania z zewnętrznym polem magnetycznym (tzw. energia Zeemana), energii
anizotropii magnetycznej, energii odmagnesowania związanej z kształtem ferromagnetyka
oraz energii sprzężenia powierzchniowego (ostatnie dwie wymienione energie zaliczane są do
efektywnej anizotropii układu).
W przypadku pojedynczej cienkiej warstwy ferromagnetyka posiadającej własność
anizotropii jednoosiowej i przy uwzględnieniu założenia pojedynczej domeny, do opisania
funkcji gęstości energii zależnej od pola magnetycznego H wystarczy równanie:
( ) )(cos)cos( 20 αθθμθ −−−= US KHME . (6-1)
gdzie: MS jest namagnesowaniem nasycenia, θ jest kątem między wektorem namagnesowania
a kierunkiem pola H, KU jest energią anizotropii jednoosiowej, α jest kierunkiem osi tej
anizotropii. Wektor magnetyzacji M będzie dążył do takiego kąta θ0 aby całkowita energia
osiągnęła lokalne minimum; łatwo udowodnić analitycznie, licząc pochodną θddE , że dla α
= 0 (oś łatwa anizotropii) pochodna energii (przy drugiej pochodnej >0) się zeruje dla kąta

-110-
θ01=0o bądź θ02= 180o. Zależnie od wartości i zwrotu przyłożonego pola magnetycznego,
lokalne minimum energii będzie istniało zarówno w θ01 i θ02 (dla pola w zakresie –HC<H<HC
gdzie HC nazywa się polem koercji) lub tylko w θ01 (H>HC) lub tylko w θ02 (H<–HC).
Istnienie dwóch minimów (z których jedno jest stanem metastabilnym) jest przyczyną
powstawania tzw. histerezy magnetycznej – bistabilności namagnesowania. Poniżej podano
przykład obliczeń kształtu funkcji (6-1) dla pola (a) H=0 (dwa równoważne stany wektora
namagnesowania), (b) 0<H<HC (jeden ze stanów, θ02= 180o, jest stanem metastabilnym) oraz
(c) H>HC (możliwy tylko jeden stacjonarny stan układu θ01= 0o).
Rys. 6.1. Gęstość energii w funkcji kąta wektora namagnesowania dla pola a) H=0, b) H<HC , c) H>HC
W przypadku osi trudnej α = π/2, pochodna wzoru (6-1) zeruje się dla
HKM US )2()cos( 00 μθ = , czyli lokalne minimum energii przesuwa się wraz ze wzrostem pola
H, co daje liniową zależność magnetyzacji:
)cos( 0θSMM = . (6-2)
Namagnesowanie rośnie liniowo z polem H aż do wartości MS dla pola większego niż pole
nasycające SUK MKH 02 μ= . Jest to zupełnie inna charakterystyka niż dyskutowana powyżej
dwustanowa pętla histerezy magnetycznej.
Ta właśnie zależność wektora namagnesowania od wartości, kierunku i zwrotu pola
magnetycznego determinuje charakterystyki magnetyczne i magnetorezystancyjne cienkiej
warstwy lub układu wielowarstwowego. Obliczenia są bardzo łatwe do przeprowadzenia, ale
z powodu ograniczenia modelu do założenia „jedna warstwa – jeden wektor
namagnesowania” nadają się tylko do jakościowej, szybkiej analizy własności
magnetycznych i magnetorezystancyjnych.
Na Rys. 6.2 jako przykład przedstawiono program magen2 stosujący model jednodomenowy
do dyskutowanych powyżej przypadków anizotropii w kierunku łatwym i trudnym jednej
warstwy magnetycznej [112]:

-111-
Rys. 6.2. Okno robocze programu magen2, dla jednej warstwy wprowadzono parametry:
namagnesowanie nasycenia, grubość i efektywna anizotropia magnetyczna. Zależnie od położenia osi anizotropii otrzymuje się charakterystykę liniową bądź histerezową.
6.1.3. Przykładowe zastosowania modelu jednodomenowego
Jeśli zostaniemy przy prostym modelu „jedna warstwa – jedna domena”, to wyrażenie na
powierzchniową gęstość energii dla układu złożonego z dwóch warstw ferromagnetycznych
oddzielonych cienką warstwą nieferromagnetyczną (np. metaliczna miedź, izolacyjna bariera
tlenku magnezu) można zapisać w postaci:
( ))cos()(cos)cos(
)(cos)cos(,
2112222
222220
112
11111021
θθαθθμ
αθθμθθ
−−−−−
−−−=
JtKHtM
tKHtME
US
US (6-3)
gdzie ti jest grubością i-tej warstwy a J12 [J/m2] jest energią sprzężenia wymiennego (rozdz.
2.5) między powierzchniami sąsiadujących warstw, determinującą wzajemne ustawienie obu
wektorów namagnesowania. W przypadku gdy stała J12>0, wektory dążą do równoległego
ustawienia względem siebie, w przypadku J12<0, do antyrównoległego. Antyrównoległe
ustawienie wektorów namagnesowania w przypadku identycznych warstw oznacza
wyzerowanie efektywnej magnetyzacji próbki. Poniżej przykład symulacji z użyciem modelu
(6-3) na tle rzeczywistego pomiaru M(H) próbki Ni-Fe/Cu/Ni-Fe:
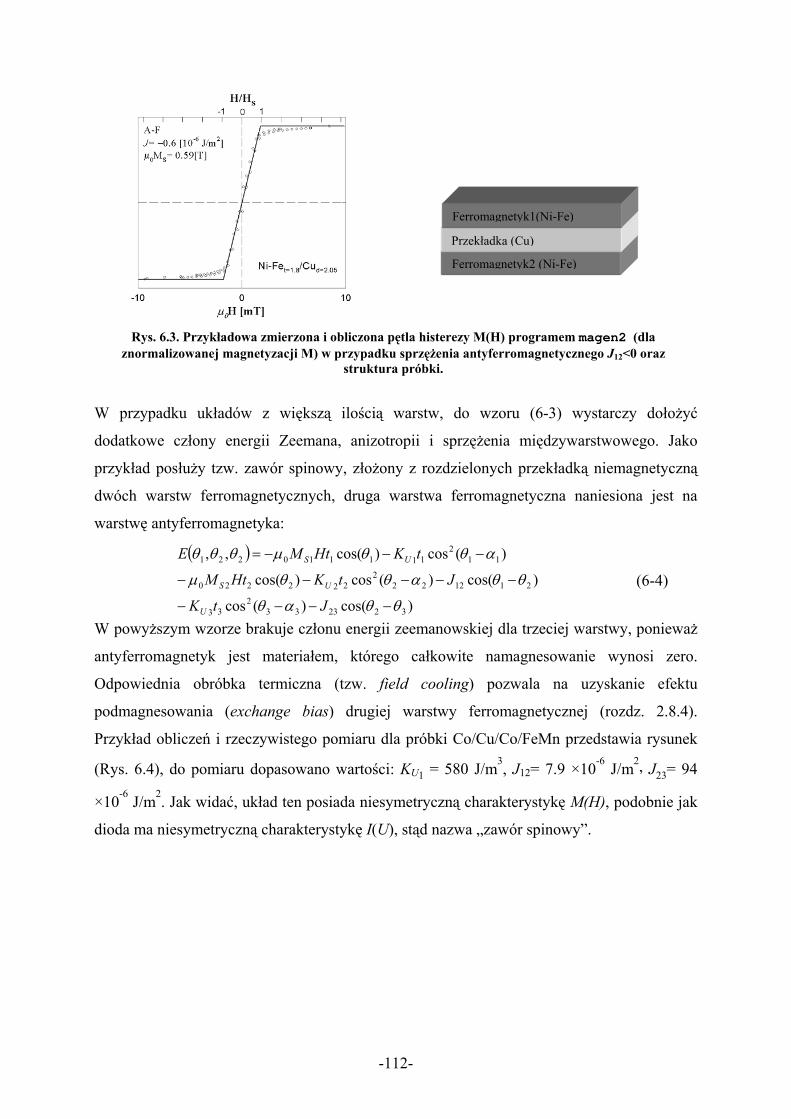
-112-
Rys. 6.3. Przykładowa zmierzona i obliczona pętla histerezy M(H) programem magen2 (dla znormalizowanej magnetyzacji M) w przypadku sprzężenia antyferromagnetycznego J12<0 oraz
struktura próbki.
W przypadku układów z większą ilością warstw, do wzoru (6-3) wystarczy dołożyć
dodatkowe człony energii Zeemana, anizotropii i sprzężenia międzywarstwowego. Jako
przykład posłuży tzw. zawór spinowy, złożony z rozdzielonych przekładką niemagnetyczną
dwóch warstw ferromagnetycznych, druga warstwa ferromagnetyczna naniesiona jest na
warstwę antyferromagnetyka:
( )
)cos()(cos
)cos()(cos)cos(
)(cos)cos(,,
3223332
33
2112222
222220
112
111110221
θθαθ
θθαθθμ
αθθμθθθ
−−−−
−−−−−
−−−=
JtK
JtKHtM
tKHtME
U
US
US
(6-4)
W powyższym wzorze brakuje członu energii zeemanowskiej dla trzeciej warstwy, ponieważ
antyferromagnetyk jest materiałem, którego całkowite namagnesowanie wynosi zero.
Odpowiednia obróbka termiczna (tzw. field cooling) pozwala na uzyskanie efektu
podmagnesowania (exchange bias) drugiej warstwy ferromagnetycznej (rozdz. 2.8.4).
Przykład obliczeń i rzeczywistego pomiaru dla próbki Co/Cu/Co/FeMn przedstawia rysunek
(Rys. 6.4), do pomiaru dopasowano wartości: KU1 = 580 J/m3, J12= 7.9 ×10-6 J/m2, J23= 94
×10-6 J/m2. Jak widać, układ ten posiada niesymetryczną charakterystykę M(H), podobnie jak
dioda ma niesymetryczną charakterystykę I(U), stąd nazwa „zawór spinowy”.
Ferromagnetyk2 (Ni-Fe)
Przekładka (Cu)
Ferromagnetyk1(Ni-Fe)

-113-
H [kA/m]-30 -20 -10 100
μ 0M
[T]
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
M1M2
M1M2
M1M2
Rys. 6.4. Przykładowa pętla histerezy M(H) zaworu spinowego Co/Cu/Co/FeMn i jego struktura.
Przemagnesowanie zaworu spinowego odbywa się dwuetapowo – jedna pętla histerezy blisko
H=0 (przemagnesowanie pierwszej warstwy Co, tzw. swobodnej) oraz druga w silnie
ujemnym polu (przemagnesowanie drugiej warstwy Co, tzw. zamocowanej). Dzięki takiemu
efektowi kierunki namagnesowań warstwy zamocowanej i swobodnej są antyrównoległe w
ujemnym obszarze pola między pętlami. Przy przejściu przez zero pola H obraca się tylko
warstwa swobodna, co ma istotne znaczenie dla zastosowań w magnetorezystancyjnych
czujnikach pola.
Jeszcze bardziej złożone struktury to zawory spinowe (rozdz. 2.7) ze strukturą AAF (Artificial
Antiferromagnet) czyli dwiema warstwami ferromagnetyka oddzielonymi przekładką,
zapewniająca silne sprzężenie antyferromagnetyczne. Takie struktury mają za zadanie
zmniejszenie szkodliwych dla zastosowań pól odmagnesowujących. Przykładowo
wykazujący efekt GMR zawór SV z AAF ma następującą strukturę (dla uproszczenia
pominięto niemagnetyczne warstwy buforowe i ochronne), patrząc od wierzchu: CoFe+NiFe
4.6/Cu 2.2/CoFe 2/Ru 0.8/CoFe 2/PtMn 20, gdzie liczby są grubościami w nanometrach.
Wzór na powierzchniową gęstość energii takiej struktury:
( )( ) ( )
( ) AFAFuAFAFAPAPAPAPAPAPuAP
APFLAPAPAPAPAPAPAPuAP
APFLFLFLFLFLFLuFL
tKJHtMtK
JJHtMtK
JHtMtKE
θθθθθ
θθθθθθ
θθθθ
22342222
222
12'
23122311112
11
1122
sincoscossin
coscoscossin
coscossin
+−−+
+−+−−−
+−−−=
(6-5)
We wzorze uwzględniono dodatkowy efekt spowodowany przekładką z rutenem, tzw.
sprzężenie międzywarstwowe bikwadratowe, reprezentowane przez stałą J23 i odpowiedzialną
za preferowany wzajemnie prostopadły kierunek wektorów magnetyzacji w sąsiadujących
warstwach. Wyniki symulacji i pomiarów M(H) i R(H) przedstawiono poniżej:
Antyferromagnetyk (FeMn)
Ferromagnetyk2 (Co)
Przekładka (Cu)
Ferromagnetyk1(Co)

-114-
Rys. 6.5. Zmierzona obliczona przy użyciu modelu (6-5) pętle histerezy M(H) i R(H) zaworu spinowego ze strukturą AAF
Przedstawione powyżej obliczenia prowadzone metodą gradientowego szukania lokalnego
minimum zaimplementowaną w programie magen2 wykazują pewne rozbieżności,
wynikające z zastosowania przybliżonego modelu jednodomenowego, podczas gdy
rzeczywista próbka jest obiektem wielodomenowym wykazującym lokalną kątową dyspersje
wektorów namagnesowania.
6.2. Modele mikromagnetyczne
6.2.1. Domeny w ferromagnetyku
Założenia modelu jednodomenowego są zbyt uproszczone w przypadku potrzeby analizy
dynamiki przełączania namagnesowania. W rzeczywistym ferromagnetyku, wyłączając
bardzo małe (kilkadziesiąt nanometrów) nanokropki bądź warstwy namagnesowane
jednorodnie pod wpływem zewnętrznego pola, następuje samoistny rozpad jednolitego
namagnesowania na tzw. domeny magnetyczne, mimo iż w naturze ferromagnetyzmu leży
identyczne namagnesowanie sąsiednich atomów [113]. Domeny powstają wskutek samoistnej
równowagi pomiędzy energią sprzężenia porządkującego namagnesowanie a liniami pola
odmagnesowującego. Istnienie jednolicie namagnesowanej warstwy ferromagnetycznej jest
energetycznie niekorzystne, ponieważ linie pola tak utworzonego „magnesu” muszą się
Si(111)
Ta(10.5)
PtMn(19.8
CoFe(2.0)
Ru((0.77)
CoFe(2.0)
Co(2.2)
CoFe(0.8)
NiFe(3.8)
Ta(5.0)
Co(0.5)

-115-
zamykać na zewnątrz materiału. Z kolei istnienie dwóch przeciwnie namagnesowanych
obszarów tworzy dodatnią energię sprzężenia na granicy tych obszarów, zwanej ścianą
domenową. Te dwie przeciwstawne tendencje powodują powstawanie równowagi między
wielkością domen a ilością ścian domenowych:
Rys. 6.6. Schematyczny podział na domeny, na czwartym rysunku najkorzystniejszy wariant [113].
Ponieważ pola odmagnesowujące odpowiedzialne za rozpad na domeny cyrkulują wokół
całego obszaru, tworzy to trudność obliczeniową polegającą na konieczności obliczenia dla
każdego atomu, superpozycji pól generowanych przez wszystkie pozostałe obszary. Metody,
które to obliczają, dla uproszczenia operując na większym od atomu obszarze dyskretyzacji
rzędu kilku do kilkudziesięciu nanometrów sześciennych, nazywają się metodami
mikromagnetycznymi.
6.2.2. Model mikromagnetyczny
Podstawowym jądrem takiego programu, podobnie do rozważanych poprzednio modeli, jest
gęstość energii liczona dla każdej komórki dyskretyzacji o objętości dV:
( ) ( ) ( ) ( )∫ ⎟⎠⎞
⎜⎝⎛ ⋅+⋅−⋅+∇= dVKAE dtot HMHMmαmM 00
22
21 μμ (6-6)
gdzie A jest sprzężeniem między najbliższymi sąsiadami, odpowiedzialnym za istotę
ferromagnetyzmu, K jest energią anizotropii, Hd jest polem odmagnesowania będącym
superpozycją pól generowanych przez wszystkie inne komórki. Położenie lokalnego wektora
namagnesowania determinowane jest przez pole efektywne związane z lokalnym minimum
całkowitej energii:
MH
δδ
μtot
effE
0
1−= (6-7)

-116-
Pole to nadaje moment skręcający wektorowi namagnesowania wywołując jego precesję, stąd
zmiany w czasie opisane są wzorem Landaua-Lifshitza-Gilberta (LLG):
( ) ( )effS
eff MtM HMMHM ××−×−=∂
∂ αγγ (6-8)
gdzie: γ jest czynnikiem giromagnetycznym, a α współczynnikiem tłumienia precesji wektora
namagnesowania.
6.2.3. OOMMF
Jednym z bardziej znanych i popularnych programów mikromagnetycznych jest program
Object Oriented MicroMagnetic Framework (OOMMF) [114]. Jest to pakiet stworzony przez
Applied and Computational Mathematics Division NIST i jest nieodpłatnie dostępny (wersja
ta wymaga modyfikacji kodów na potrzeby laboratorium). Cechami tego programu są:
• prostokątna jednorodna siatka dyskretyzacji,
• język skryptowy pozwalający na swobodną definicję symulowanego problemu,
• otwarty kod źródłowy umożliwiający tworzenie własnych rozszerzeń,
• program operuje na siatce XY rozszerzonej o warstwy Z.
• Jako dane wyjściowe otrzymuje się, oprócz charakterystycznych parametrów, również
mapy wektorowe (namagnesowanie) bądź skalarne (energia) dla każdego kroku pola
bądź kroku czasu.
Jako przykład podane zostanie obliczenie procesu przemagnesowania cienkiej warstwy o
rozmiarach 2000 nm×500 nm×20 nm, z polem wzdłuż osi łatwej, analogiczne do analizy
przeprowadzonej na początku rozdziału. Parametry symulacji to: rozmiar siatki obliczeniowej
20 nm×20 nm×20 nm (czyli łącznie 2500 sześcianów), stała sprzężenia wymiennego A =
13·10-12 J/m, energia anizotropii KUx=0.5 kJ/m3, namagnesowanie nasycenia μ0MS = 1T,
współczynnik tłumienia α = 0.5. Na Rys. 6.7 przedstawiono zależność namagnesowania M od
indukcji pola magnetycznego B= μ0H oraz dodatkowo mapy wektorów namagnesowania
przed, tuż przed, w trakcie oraz po przełączeniu magnetyzacji (czyli po przekroczeniu pola
koercji HC):

-117-
Rys. 6.7. Mapy wektorów namagnesowania (kolor oznacza kierunek) przy przejściu z ujemnego do dodatniego pola, po prawej znormalizowana pętla histerezy M(H).
Otrzymany wynik niewiele się różni od prostego modelu jednodomenowego z początku
rozdziału, za wyjątkiem lekkich zaokrągleń zamiast idealnie prostokątnej pętli histerezy.
Podobnie jak w rzeczywistości, nieidealność pętli histerezy związana jest z polami
odmagnesowującymi na końcach warstwy. Dokładniejsze odwzorowanie rzeczywistości jest
bardzo kosztowne obliczeniowo, ale jest konieczne szczególnie wtedy, gdy interesuje nas
wpływ kształtu struktury (tzw. anizotropia kształtu) i efektów rozmiarowych na proces
przemagnesowania.
Na rysunku (Rys. 6.8) zamieszczono przykładowy rozkład namagnesowania (kolor zielony
oznacza orientację w dół, pomarańczowy – w górę) dla złącza MTJ (takie jakie są stosowane
w pamięciach STT-RAM) o średnicy 300 nm złożonego z dwóch warstw ferromagnetycznych
(grubość 1 nm) i anizotropii prostopadłej do powierzchni (energia anizotropii odpowiednio
400 i 500 kJ/m3) oraz niemagnetycznej bariery tunelowej o grubości 1 nm (tzw. Pseudo Spin
Valve, PSV). Ponieważ pomiędzy warstwami ferromagnetycznymi odseparowanymi cienką
warstwą przekładki istnieje sprzężenie wymienne, do pliku wsadowego .mif dodano człon
energii Oxs_TwoSurfaceExchange o wartości J1 = 4·10-6 J/m2. Komórka dyskretyzacji
miała rozmiary 2 nm×2 nm×1 nm, więc całkowita ilość komórek wynosiła 90000. Pełna pętla
histerezy (75 kroków pola H) to prawie 200 tys. iteracji (ilość iteracji po każdym kroku pola
zależy od dynamiki układu oraz kryteriów zbieżności), całkowity czas symulacji na 4-

-118-
rdzeniowym CPU 2.26 GHz to ponad doba (zamiast kilkunastu sekund w przypadku
uproszczonego programu magen2).
Rys. 6.8. Mapy wektorów namagnesowania złącza MTJ rzutowane na płaszczyznę XY i YZ.
Podstawowym wynikiem symulacji jest wykres M(H), przy użyciu programu OOMMF
można jednocześnie wizualizować wszystkie trzy składowe MX, MY i MZ. Na Rys. 6.9
przedstawiono wynik symulacji powyższego złącza MTJ łącznie z pierwotną krzywą
namagnesowania (tzn. symulacja zaczyna się z rozporządkowanymi spinami i polem H=0).
Ponieważ kierunek anizotropii i pola magnetycznego jest w kierunku osi Z, wykres
charakterystyczny dla PSV jest wykresem MZ(H), pozostałe wykresy informują o średniej
odchyłce wektora namagnesowania na kierunek X lub Y.
Rys. 6.9. Namagnesowanie w funkcji indukcji pola magnetycznego B, znormalizowane MZ w kolorze
czerwonym.
Innym programem podobnym do OOMMF, ale komercyjnym, jest pakiet LLG [115].

-119-
6.2.4. MAGPAR
Prostokątna siatka elementów skończonych używana w programie OOMMF niezbyt nadaje
się do symulacji dużych struktur z niewielkimi, ale istotnymi detalami (przykładowo cienka,
ale szorstka warstwa, warstwa w formie cylindra ale z defektami na krawędzi, zagięte
nanodruty), ponieważ prawidłowe i dokładne odwzorowanie detalu niesie ze sobą olbrzymią
ilość punktów obliczeniowych w innych, jednorodnych obszarach. Dlatego stosuje się
programy z możliwością adaptywnego zmieniania gęstości punktów siatki obliczeniowej
[116]. Zamiast prostopadłościanów, komórki elementów skończonych mają kształt
(zazwyczaj nieforemnych) czterościanów. Przykłady takiej siatki podano na Rys. 6.10.
Rys. 6.10. Rys. Siatka nieregularna a) trójkątów (powierzchnia) i b) czworościanów (objętość).
Na rysunku (Rys. 6.10b) pokazano fragment dwóch cylindrycznych warstw oddzielonych
przekładką niemagnetyczną, czyli podobny przykład PSV - nanopilar jak opisywany w
rozdziale OOMMF. W przypadku siatki nieregularnej można dokładniej odwzorować np.
elipsy a pominąć punkty leżące w materiale niemagnetycznym. Jednym z programów, który
używa takiej siatki elementów skończonych, jest program MagPar. Zaletą tego programu jest
wsparcie dla obliczeń równoległych (cluster computing). W odróżnieniu od programów
omawianych w poprzednich rozdziałach, program MagPar nie ma interfejsu graficznego –
symulacja działa w trybie tekstowym, wyniki symulacji ogląda się przy użyciu zewnętrznych
programów, również pliki wejściowe należy przygotować za pomocą edytora tekstu (*.krn -
parametry materiałowe, allop.txt – opcje programu) oraz przy użyciu specjalistycznego
programu GID do tworzenia modeli 3D, ich przetwarzania na sieć elementów skończonych
oraz kompilacji do postaci *.inp czytanych przez program MagPar.

-120-
[112] M. Czapkiewicz, program MAGEN2,
http://layer.uci.agh.edu.pl/M.Czapkiewicz/Research/symul
[113] A. Hubert and R. Schafer, Magnetic Domains – The Analysis of Magnetic
Microstructures, 257, 306, Springer-Verlag Berlin Heidelberg 1998
[114] Object Oriented MicroMagnetic Framework project at ITL/NIST
http://math.nist.gov/oommf
[115] LLG http://llgmicro.home.mindspring.com/
[116] Magpar http://www.magpar.net/

-121-
7. Zapis magnetyczny
7.1. Analogowy zapis magnetyczny Analogowy magnetyczny zapis dźwięku ma historię dość długą, którą liczymy od dnia
udzielenia patentu w dniu 1 grudnia 1898 roku na telegrafon duńskiemu technikowi
Valdemarowi Poulsenowi (Rys. 7.1) [117]. Pomysł Poulsena rozwinął konstrukcyjnie Kurt
Stille (1920) dokonując elektronicznego wzmocnienia dźwięku. Patent Stille wykupiła firma
British Ludwig Blattner Picture Corporation, która wyprodukowała blattnerphone (Rys. 7.2),
za pomocą którego bez powodzenia usiłowała synchronizować dźwięk z obrazem [118].
Rys. 7.1. Telegrafon (1898). Urządzenie po raz pierwszy zaprezentowano na Światowej Wystawie w
Paryżu w 1900 roku. Nośnikiem informacji był drut stalowy o grubości 1mm i koercji 40 Oe przesuwający się z prędkością 2m/s.
Rys. 7.2. Blattnerphone – urządzenie wyprodukowane przez Ludwig Blattner Picture Company w latach
dwudziestych XX wieku. Nośnikiem informacji była metalowa taśma szerokości 3 mm i grubości 0.05 mm przesuwająca się z prędkością 1 m/s.
Telegrafon i blattnerphone były prototypami, późniejszego szpulowego magnetofonu z taśmą
magnetyczną, najpierw papierową (Rys. 7.3). W latach 1940 – 80 magnetofon był
podstawowym sprzętem do odtwarzania zapisanego dźwięku, głównie muzyki. Nowoczesny

-122-
magnetofon (Rys. 7.4), którego taśma magnetyczna mogła pomieścić kompletne utwory
muzyczne wymagała przede wszystkim zwiększenia gęstości zapisu magnetycznego, który
możliwy był poprzez do miniaturyzację głowicy zapisująco-odczytującej i nowe rozwiązania
w zakresie materiałów magnetycznych stosowanych na taśmy. W latach trzydziestych XX
wieku firma BASF rozpoczęła produkcje pierwszych taśm z tworzyw sztucznych pokrytych
tlenkami żelaza, chromu, kobaltu (Rys. 7.5). Zastosowany materiał i doskonalona ciągle
nanotechnologia proszków magnetycznych (Rys. 7.5) decydowała o gęstości zapisu i jakości
odtwarzania [119].
Rys. 7.3. Pierwszy magnetofon. Nowy nośnik informacji – papierowa taśma pokryta klejem i opiłkami
żelaza (Fritz Pflumer 1927 rok).
Rys. 7.4. Magnetofon szpulowy do dotwarzania dźwięku lata czterdzieste XX wieku. Obok szpula
magnetyczna.
Rys. 7.5. Popularne magnetyczne materiały tlenkowe i metaliczne stosowane na taśmy magnetyczne.

-123-
Rys. 7.6. Walkman firmy Sony model WM-GX302 z wbudowanym radioodbiornikiem. Typowa kaseta
kompaktowa (na fotografii firmy TDK). Dzięki miniaturyzacji elementów elektroniki, w szczególności półprzewodnikowych, w firmie
Sony został zaprojektowany w 1979 roku przenośny magnetofon o handlowej nazwie Sony
Walkman (Rys. 7.6). Walkmany kasetowe są już przeżytkiem. Zostały zastąpione przez
urządzenia, w których nośnikiem dźwięku są nośniki cyfrowe: płyty kompaktowe (dyski
optyczne), minidyski oraz inne miniaturowe pamięci masowe. Aktualnie najbardziej
powszechnymi odtwarzaczami przenośnymi są odtwarzacze mp3. 25.października 2010 firma
Sony ogłosiła oficjalne zakończenie seryjnej produkcji Walkmanów kasetowych.
7.2. Twardy dysk Pierwszy dysk komputerowy (Rys. 7.7), czyli pamięć masowa służąca do przechowywania
informacji cyfrowej, został po raz pierwszy skonstruowany w 1956 roku w IBM na potrzeby
komputera IBM 305 RAMAC, Random Access Method of Accounting and Control. Stacja
dysków (hard disc drive - HDD) składała się z 50 talerzy o średnicy 24 cale, całkowitej
pojemności 4.4 MB [120]. W tamtych czasach koszt 1 GB to 10 mln USD, gdy obecnie to
koszt mniejszy od 1USD.

-124-
Rys. 7.7. Pierwsza stacja dysków obsługująca lampowy komputer IBM 305 RAMAC (dla porównania
współczesny twardy dysk, trzymany w dłoni).
Rys. 7.8. Mapa drogowa gęstości upakowania informacji pamięci dyskowych w latach 1956-2010 (a). Żółte elipsy pokazują nowe technologie zapisu na pojedynczych komórkach bitowych (patterned media),
lub molekułach magnetycznych. Punkt przegięcia wzrostu gęstości zapisu po wprowadzeniu elementu magnetorezystancyjnego w miejsce cewki indukcyjnej (b).
a)
b)

-125-
Jak wynika z mapy drogowej gęstości upakowania informacji (wyrażonej w Mbits/cal2) w
komputerowych dyskach magnetycznych, tak długo jak stosowano głowicę indukcyjną (tj. do
1990 roku), która zarówno zapisywała jak i odczytywała informacje, był stały tylko 21% na
rok wzrost gęstości upakowania informacji (Rys. 7.8). Pozostawiając cienkowarstwową
cewkę jako element zapisujący oraz wprowadzając magnetorezystor jako element odczytowy,
uzyskano prawie trzykrotnie większy wzrost pojemności dysków, dlatego że coraz
sprawniejszy magnetorezystor był zdolny odczytywać informacje z coraz mniejszej komórki
bitowej. Najpierw w głowicach wykorzystywano efekt AMR (ΔR/R = 4%), potem GMR
(ΔR/R = 10 – 15%) a obecnie TMR (ΔR/R = 300% - 600%), dzięki temu już przez ponad
dwadzieścia lat udaje się utrzymać stały wzrost powierzchniowej gęstości upakowania
informacji wynoszący 57%/rok (Rys. 7.8b).
Bardzo duży przyrost zmian oporu, w bardzo małym polu magnetycznym, jaki oferuje zawór
spinowy TMR, nie ogranicza praktycznie rozmiaru kodowanego bitu, innymi słowy głowica
obsługująca twardy dysk nie stanowi problemu w procesie zwiększania powierzchniowej
gęstości upakowania informacji dysku.
Jeśli rośnie powierzchniowa gęstość zapisu, to maleje rozmiar komórki bitowej. Więc aby
zabezpieczyć w przybliżeniu stałą liczbę krystalitów na bit, musi się zmniejszać w procesie
technologicznym rozmiar ziarna krystalicznego (Rys. 7.9). Małe ziarna i mała ich liczba są
bardziej podatne na fluktuacje termiczne, które są przyczyną rozporządkowania
magnetycznego co prowadzi do utraty bitów. Tak więc nie jest fizycznie możliwy
nieskończony wzrost gęstości upakowania informacji, fizyczną granicę wyznacza tzw. efekt
superparamagnetyczny (superparamagnetic limit). Oznacza on, że dostarczona z zewnątrz
energia cieplna (KT) nie może przewyższyć energii bariery, określonej anizotropią
magnetyczną (KUV), rozdzielającej dwa stabilne minima energii namagnesowania o
przeciwnych zwrotach (Rys. 7.10).

-126-
Rys. 7.9. Zależność pomiędzy powierzchniową gęstością zapisu informacji, rozmiarem bitu i wielkością krystalitu. Dla obecnie wchodzących do produkcji dysków o pojemności większej niż 500 GB rozmiar
komórki bitowej wynosi około 25 nm × 50 nm.
Rys. 7.10. Schemat stabilności termicznej zapisu dwóch przeciwnych orientacji magnetyzacji
odpowiadających cyfrowym bitom „0 „ i „1”. Energia termiczna KT musi być mniejsza od bariery energii anizotropii magnetycznej KUV [119].
Teoretyczne oszacowania podają, że warstwa magnetyczna o anizotropii KU=2×105 J/m3
zbudowana ze sferycznych krystalitów o średnicy 9 nm będzie stabilna termicznie w
temperaturze pokojowej (T = 300 K) przez co najmniej 10 lat.
Ziarnistość struktury krystalicznej warstwy magnetycznej dysku decyduje o tzw. stosunku
sygnału do szumu (S/N signal to noise), który schematycznie przedstawia rysunek (Rys.
7.11), obok zdjęcie z mikroskopu elektronowego pokazujące realną ziarnistą strukturę
krystaliczną stopu magnetycznego. Jak widać malenie rozmiaru bitu obniża znacznie S/N.

-127-
Rys. 7.11. Malenie sygnału do szumu S/N w ciągłej, krystalicznej warstwie magnetycznej w zależności od wielkości bitu, dla stałego rozmiaru ziarna. Rzeczywisty obraz TEM z mikroskopu elektronowego
krystalitów w warstwie CoCrPtTaB [119]. Typowym materiałem magnetycznym warstwy, w której kodujemy informacje w formie
zapisu podłużnego jest stop kobaltowy z dodatkami powodującymi właściwą ziarnistość i
segregację fazową: Co (70% - 80%) z dodatkami: Cr+Pt(Ta) (do 20%) i małą domieszką B
(do 3%). Metalurgia stopu CoCrPtTaB i jego dokładny skład atomowy jest tajemnicą
producenta dysków (Fujitsu, Toshiba, Seagate, Samsung). Dąży się do warstwy z krystalitami
o dużej anizotropii, które są mniejsze od komórki bitowej, jednakowe co do rozmiaru i
magnetycznie od siebie odizolowane.
Typowa wielowarstwowa struktura dysku przestawiona jest na rysunku (Rys. 7.12). Podłoże,
z lekkiego stopu AlMg, lub szkła (stosowane w przypadkach 1.calowych mini napędów
dyskowych), ma zapewniać bardzo gładkie, równoległe do siebie powierzchnie. Szlifowana
mechanicznie powierzchnia AlMg pokryta jest elektrolitycznie nałożoną 10 μm warstwą
niemagnetycznego stopu NiP, której zadaniem jest zakrycie mechanicznych szorstkości.
Potem nanoszone są metodą sputteringu 20 nm warstwa Cr, która jest tzw. warstwą
zarodkową dla wzrostu na niej 20 nm warstwy magnetycznej CoCrPtTaB, na której
zapisywana jest informacja. Warstwa magnetyczna jest zabezpieczona twardą warstwą
diamentową, którą nanosi się w tym samym procesie jak warstwy Cr i CoFeB. Rolą warstwy
diamentowej jest zabezpieczenie przed rysami spowodowanymi na przykład hamowaniem
głowicy podczas zatrzymywania dysku. Ostatnia warstwa „smaru” tzw. poślizgowa
najczęściej polimerowa (tajemnica producenta), ma coraz subtelniejsze głowice, chronić
przed uszkodzeniami podczas rozpędzania i zatrzymywania dysku.

-128-
Rys. 7.12. Typowa struktura warstwowa dysku: podłoże AlMg z warstwą NiP lub szkło, warstwa
zarodkowa Cr dla warstwy magnetycznej CoCrPtTaB, twarda diamentowa warstwa zabezpieczająca, warstwa poślizgowa [119].
7.2.1. Zapis podłużny i prostopadły W obrazie mikrostrukturalnym, którego schemat pokazuje rysunek (Rys. 7.13) w zapisie
podłużnym mamy dość szeroki około 20 nm obszar przejściowy, który jest martwy dla zapisu
i pozostaje nie wykorzystany. Stąd aby zwiększyć gęstość zapisu należy przejść na zapis
prostopadły, dla którego obszar przejściowy pomiędzy przeciwnie namagnesowanymi
komórkami bitowymi jest mały z powodu zamkniętego obiegu strumienia linii pola
magnetycznego, natomiast w przypadku zapisu podłużnego rozbieżny rozkład linii pola
magnetycznego znaczenie poszerza obszar przejściowy. Do zapisu prostopadłego należy
stosować cienką warstwę z prostopadłą do płaszczyzny anizotropią magnetyczną na przykład
supersieć Co/Pt [121], która jest naniesiona na grubej, miękkiej magnetycznie warstwie
zamykającej strumień linii sił pola magnetycznego. Ostry biegun zapisującej głowicy
indukcyjnej (Rys. 7.14) formuje odpowiednio małą komórkę bitową gwarantującą bardzo
dużą gęstość zapisu (np. 1 TB/cal2). Zapis podłużny realizowany jest metodą tradycyjną
poprzez szczelinę zamykającą kołowo linie strumienia pola magnetycznego (Rys. 7.14), tego
rodzaju zapis daje maksymalną gęstość 100 – 200 GB/cal2. Firmy Seagate czy Hitachi oferują
już napędy dyskowe 2.5” o pojemności 1.5 TB i około 4 TB w 2013 roku. Dyski twarde
montowane w popularnych PC osiągną niebawem pojemność około 10 TB.

-129-
Rys. 7.13. Mikrostrukturalny schemat zapisu podłużnego w warstwie magnetycznej stopu CoCrPtTaB.
Obok obraz magnetyczny otrzymany za pomocą mikroskopu sił magnetycznych (MFM w Katedrze Elektroniki AGH ), reprezentowany przez przeciwnie namagnesowane białe/czarne domeny (bity) o
wymiarach 200 nm × 40 nm.
Rys. 7.14. Schemat idei zapisu podłużnego i prostopadłego z użyciem głowicy indukcyjno-magnetorezystancyjnej. Obok gęstość zapisu komórek bitowych i obszaru przejściowego w przypadku zapisu podłużnego i prostopadłego. Rozkład linii pola magnetycznego od bitu kodowanego prostopadle
zajmuje mniejszy obszar przejściowy niż od bitu kodowanego podłużnie [122].
7.2.2. Dyski przyszłości Z mapy drogowej [122, 123] wzrostu, powierzchniowej gęstości upakowania informacji w
latach od roku 2006 i dalej (Rys. 7.15), widać że określone technologie się nasycają i są
zastępowane nowszymi rozwiązaniami. W roku 2006 zapis podłużny wszedł w nasycenie
(100 - 150 Gbits/cal2), producenci dysków zaczęli przechodzić z zapisu podłużnego na

-130-
prostopadły (300 - 1000 Gbits/cal2). Technologia zapisu prostopadłego również wkrótce się
nasyci (2013), ale nowe rozwiązania zostały przez producentów na prototypach sprawdzone.
Dalszy postęp, jak łatwo zauważyć, pozostaje w ścisłym związku z postępem w technologii
nanostrukturyzacji (przećwiczonym na układach scalonych i procesorach), gdyż można
zrezygnować z ciągłej warstwy magnetycznej na rzecz układu nano-komórek bitowych
(patterned media 1500 – 4000 Gbits/cal2). Proszę zwrócić uwagę, że granica
superparamagnetyczna w zrozumieniu cienkiej ciągłej warstwy zostaje przesunięta, w
przypadku izolowanych komórek bitowych, do wyższych gęstości zapisu.
Kiedy na układzie pojedynczych komórek bitowych będziemy zapisywać, wspomagając
impulsem laserowym (na jednej komórce możemy dokonać, poprzez zmianę pola koercji ,
kilku operacji logicznych) gęstość zapisu według technologii thermally assisted recording
znacznie wzrośnie (2000 - 15000 Gbits/cal2).
Rys. 7.15. Powierzchniowa gęstość upakowania informacji dysków nowej generacji, których prototypy
zostały przetestowane u czołowych producentów Seagate, Fujitsu, Toshiba, Samsung.
Patterned media (Rys. 7.16) - oznacza to, że dysk ma zaprogramowaną strukturę, z określoną
dokładnie lokalizację każdego bitu. Gęstość zapisu może być zwiększana bez narażania
integralności danych.

-131-
Rys. 7.16. Struktura izolowanych komórek bitowych dysku wykonanych metodą tłoczenia.
Zapis wspomagany impulsem laserowym (thermally assisted recording), choć ideowo i
fizycznie jest bliski zapisowi na dyskach magnetooptycznych [119,124], w których
wykorzystywano układy wielowarstwowe amorficznych stopów ziemia rzadka - metal
przejściowy (RE-TM) z anizotropią prostopadłą, to jednak jego realizacja techniczna nie
została jeszcze opisana przez czołowych producentów dysków.

-132-
Rys. 7.17. Zapis przy obniżonym polu koercji na skutek podgrzania, utrwalony wzrostem pola koercji po
ostudzeniu. Wyzwaniem dla producentów jest hybrydowa głowica indukcyjno/optyczna/magnetorezystancyjna zdolna operować na nano-komórce bitowej.
7.3. Głowice dyskowe
Ewolucja w czasie głowic dyskowych (Rys. 7.18) sprowadza się do problemu ich
miniaturyzacji, ze względu na konieczność zwiększania gęstości zapisu poprzez malenie
rozmiaru komórki bitowej. Konstruktorzy głowic z technologii materiału litego przeszli na
głowicę cienkowarstwową (1980) (wzrost gęstości zapisu 21%/rok (Rys. 7.8)), odczyt
poprzez efekt indukcyjny zastąpili zjawiskiem magnetorezystancyjnym (1990) (wzrost
gęstości zapisu 59%/rok (Rys. 7.8)). Dalszy postęp w nanotechnologii umożliwia obecnie
wzrost gęstości zapisu bliski 100%/rok.
Głowica indukcyjno-magnetorezystancyjna jest zintegrowana z tzw. suwakiem (slider) (Rys.
7.19), który jest zamontowany na końcu przegubowego ramienia. Nano-suwak (nano-slider)
zbudowany jest z kompozytu Al2O3-TiC, posiada wymiary (2.05×1.6×0.45 mm), od spodu ma
wytrawione jonowo kanały powietrzne pozwalające mu unosić się na poduszce powietrznej
na wysokości ok. 10 nm.

-133-
Rys. 7.18. Ewolucja zmian konstrukcyjnych głowic dyskowych zapisująco-odczytujących.
Rys. 7.19. Stacja dysków, stalowe ramie przegubowe z nano-suwakiem na końcu ramienia [119].

-134-
Rys. 7.20. Schemat głowicy indukcyjnej (zapis)/zawór spinowy GMR (odczyt) zintegrowanej z ramieniem i
pico-suwakiem.
W 1997 roku producenci stacji dyskowych zastosowali jako element odczytowy system
warstwowy typu zawór spinowy GMR (rozdz. 2.7.1). Rysunek (Rys. 7.20) pokazuje
poszczególne elementy składowe kompletnej cienkowarstwowej głowicy indukcyjnej
(zapis)/SV-GMR (odczyt) zintegrowanej z pico-suwakiem (1.25×1×0.3 mm). Należy
wyróżnić cienkowarstwową cewkę (od 5 do 10 zwojów Cu) indukcyjną, którą otacza rdzeń
magnetyczny ze szczeliną zapisującą oraz układ wielowarstwowy zaworu spinowego GMR
pełniący funkcje odczytu. Schemat wzdłużnego przekroju poprzecznego przez głowicę
zapisująco/odczytującą (Rys. 7.21) pozwala nam się zorientować w rodzaju zastosowanych
materiałów. Natomiast, poprzeczny (od spodu) jest rzeczywistym obrazem z mikroskopu
skaningowego (SEM), rozróżniamy w nim szczeliny zapisującą i odczytującą,
magnetorezystor SV-GMR z doprowadzeniami oraz ekrany magnetyczne oddzielające cześć
indukcyjną od magnetorezystancyjnej.

-135-
Rys. 7.21. Schemat przekroju poprzecznego cienkowarstwowej głowicy indukcyjno magnetorezystancyjnej (write head)/ SV-GMR (read head), zielonym kolorem zaznaczone ekrany magnetyczne oddzielające
głowicę zapisującą od odczytowej. Zdjęcie z elektronowego mikroskopu skaningowego (SEM) obrazuje poprzeczny przekrój (od spodu) szczelin zapisującej i odczytującej, magnetorezystor (MR) z
doprowadzeniami, ekrany magnetyczne i bieguny rdzenia cewki zapisującej (biała kreska = 10 μm).
7.3.1. Głowica – zawór spinowy GMR
Zawór spinowy SV-GMR lub SV-TMR zintegrowany z głowicą indukcyjną (zapisującą), jest
umieszczony w określonym miejscu suwaka (pico/nano-slider), czujnik ten czyta pole
magnetyczne na pewnej wysokości nad komórkami bitowymi nośnika informacji. Aby
wyliczyć wielkość sygnału wyjściowego należy uwzględnić szereg czynników
geometrycznych położenia czujnika GMR omówionych poniżej (Rys. 7.22).
Rys. 7.22. Schemat głowicy odczytowej zawór spinowy GMR do obliczeń sygnału wyjściowego. Przyrost sygnału magnetorezystancyjnego (6-1) przede wszystkim decyduje o wielkości
sygnału odczytu (7-2).

-136-
⎟⎠⎞
⎜⎝⎛ Δ−Δ
=Δ
2)cos(1
0
max
0
θRR
RR (7-1)
gdzie:
Δθ jest kątem pomiędzy namagnesowaniem warstwy swobodnej i warstwy zamocowanej,
R0 jest rezystancją w stanie równoległym namagnesowania,
ΔRmax jest różnicą rezystancji pomiędzy równoległym i antyrównoległym namagnesowaniem.
Jeśli Δθ=90o to napięcie wyjściowe z zaworu spinowego GMR wynosi:
sigGMRfs
GMR EtwM
IV Φ=0
max
2ΔR
μ (7-2)
gdzie:
I jest prądem zasilania czujnika (sensing current) w geometrii prąd w płaszczyźnie (current in
plane CIP),
EGMR jest współczynnikiem sprawności czujnika (zależnym od zmiany z odległością pola
magnetycznego pochodzącego od komórki bitowej),
Φsig jest strumieniem sygnału wchodzącego do warstwy swobodnej,
w jest szerokością (read track width),
t jest grubością czujnika,
Msf jest namagnesowaniem nasycenia warstwy swobodnej czujnika.
Umieszczenie czujnika pomiędzy ekranami magnetycznymi wprowadza poprawki
geometryczne w postaci:
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+
−−⎟⎟
⎠
⎞⎜⎜⎝
⎛+
+⎟⎟⎠
⎞⎜⎜⎝
⎛ +Δ=
dfgx
dfgx
gtg
tMMRIEV f
s
rGMRGMR
2/arctan2/arctanmax
πδ (7-3)
gdzie:
czujnik o grubości t jest umieszczony pośrodku pomiędzy dwoma magnetycznymi ekranami
w odległości g od każdego z nich, tak że cała odległość pomiędzy ekranami wynosi 2g+t,
δ jest grubością warstwy nośnika, wtedy f wynosi:
( )c
r
H
dMf
π
δδ 2+= (7-4)
Przykładowe obliczenia napięcia wyjściowego GMR:
Parametry magnetyczne nośnika, na którym zapisywana jest informacja:
Mγ = 500 kA/m; δ= 20 nm ⇒ Mγδ = 10 mA

-137-
Parametry czujnika GMR: Msf =700kA/m; grubość t= 10nm
Odległość pomiędzy ekranami 2g= 100nm; EGMR=0.1; prąd czujnika I=5 mA; ΔRmax=2.5Ω.
Odległość pomiędzy głowicą odczytową a powierzchnią dysku twardego d = 20nm;
nachylenie przejścia f=20nm.
Napięcie odczytu peak to peak Vp-p=2VGMR(x=0)=1.5 mV, przykład sygnału wyjściowego
(Rys. 7.23):
Rys. 7.23. Przykład sygnału wyjściowego z czujnika SV-GMR.
Należy rozpatrzyć wpływ strat pochodzących od odległości głowicy nad dyskiem, które rosną
eksponencjalnie z odległością d (head/recording medium) (Rys. 7.24) kd
sensormediumGMR eSJV −= (7-5)
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡⎟⎠⎞
⎜⎝⎛
⎥⎦
⎤⎢⎣
⎡ −∝
−−
2
2sin
1kg
kg
keeV
kkd
GMR δ
δ
(7-6)
gdzie odległość między środkami zapisanych komórek bitowych jest równa π/k [119].
Opisane w rozdziałach 7.2 i 7.3 nowe technologie wytwarzania twardych dysków i głowic
dyskowych, które dają stały wzrost upakowania informacji, są możliwe dzięki badaniom
teoretycznym i eksperymentalnym nad magnetyzmem niskowymiarowym.

-138-
Rys. 7.24. Z zależności gęstości powierzchniowej zapisu od odległości suwaka/głowicy (slider/head) od powierzchni dysku. Ze wzrostem odległości maleje eksponencjalnie gęstość zapisu. Dla gęstości
upakowania większej niż 100 Gbits/cal2 odległość suwak/głowica musi być mniejsz niż 10 nm. Tak ostry reżim gładkości dysku dla gęstości większych niż 1000 Gbits/cal2 musi zapewnić tzw. „gładkość
atomową” co jest ogromnym wyzwaniem technologicznym. [117] http://pl.wikipedia.org/wiki/Valdemar_Poulsen
[118] http://www.quido.cz/objevy/magnetofon.a.htm
[119] R. Waser, Nanoelectronics and Information Technology, WILEY-VCH Verlag GmbH
& Co. KGaA, Weinheim 2003, rozdział 5
[120] http://en.wikipedia.org/wiki/IBM_305_RAMAC
[121] J. Kanak, M. Czapkiewicz, T. Stobiecki, M. Kachel, I. Sveklo, A. Maziewski, S.van
Dijken, Influence of buffer layers on the texture and magnetic properties of Co/Pt multilayers
with perpendicular anisotropy, phys. stat. sol. a, 204 (2007) 3950
[122] https://www1.hitachigst.com/hdd/research/storage/pm/index.html
[123] http://nextbigfuture.com/2011/03/progress-to-multi-terabit-per-inch-bit.html
[124] S. Sugano, N.Kojima, Magnetooptics, Springer-Verlag Berlin Heidelberg 2000

-139-
8. Pamięci magnetyczne
8.1 Pamięć MRAM
Komórka MRAM zbudowana na SV-MTJ wykorzystuje dwa stabilne nisko i wysoko
rezystancyjne stany. Niski stan reprezentuje logiczne „0”, natomiast wysoki stan reprezentuje
logiczne „1” (Rys. 8.1a). Zmiana stanu komórki (zapis informacji) realizowana jest przez
zmianę kierunku namagnesowania warstwy swobodnej za pomocą prądów (IB, IW)
przepływających w liniach umieszczonych nad i pod SV-MTJ (Rys. 8.1b). Odczyt stanu
komórki realizowany jest przez przepuszczenie prądu (IR) przez złącze i porównanie
rezystancji złącza z wartością referencyjną (Rys. 8.1c). Pamięć MRAM zbudowana w oparciu
o SV-MTJ (prototypy między innymi zaprezentowały Motorola, Infineon-IBM, Freescale
produkuje i sprzedaje 4Mbit chip za około 25USD) oferuje nieulotność, zbliżony czas odczytu
i zapisu do pamięci SRAM (Static Random Access Memory), porównywalne rozmiary
komórek do DRAM (Dynamic Random Access Memory) i FLASH, nieograniczoną liczbę
cykli zapisu oraz odporność na promieniowanie radiacyjne [125, 126, 127, 128].
Rys. 8.1. Budowa i organizacja pamięci MRAM (a), zapis informacji do komórki (b), odczyt stanu
komórki (c).

-140-
8.2 Reprogramowalne spinowe układy logiczne
Obiecującym zastosowaniem magnetycznych złącz tunelowych są nowego typu
reprogramowalne układy logiczne, w których przy pomocy złącza lub kilku złącz można
zbudować reprogramowalne bramki logiczne. Na rysunku (Rys. 8.2) przedstawiono
przykładowy schemat układu bramki logicznej zrealizowanej w oparciu o jedno złącze MTJ.
W tym przypadku wysoki lub niski stan rezystancyjny (zależny od kierunków
namagnesowania MS i MP elektrod ferromagnetycznych) złącza jest wyjściowym stanem
logicznym, a kierunki prądów w liniach, stosowane do zmiany kierunków namagnesowań
elektrod ferromagnetycznych, reprezentują logiczne sygnały wejściowe bramki [127, 129,
130, 131, 132].
Rys. 8.2. Koncepcja realizacji reprogramowalnej spinowej bramki logicznej na jednym MTJ.
Poprzez zmianę wzajemnej relacji pomiędzy kierunkami namagnesowania elektrod
ferromagnetycznych można zaprogramować złącze (ustalić wyjściowe kierunki wzajemnego
namagnesowania MS i MP), aby w zależności od potrzeb zrealizować funkcje logiczne AND
lub OR oraz NAND lub NOR.
Od MTJ działającego jako komórka pamięci MRAM lub bramka logiczna wymagany jest jak
najwyższy TMR (decyduje między innymi o rozróżnialności stanu „0” i „1”), małe pola
przełączeń warstwy swobodnej oraz duże pola przełączeń warstwy zamocowanej (pinned).
Mała wartość pól przełączeń warstwy swobodnej wymagana jest ze względu na
minimalizację poboru mocy przez układ (prąd potrzebny do zmiany stanu komórki lub układu

-141-
logicznego). Duża wartość pól przełączeń warstwy przytrzymanej wymagana jest, aby
uniemożliwić prądom stosowanym do zmiany kierunku namagnesowania warstwy swobodnej
zmianę kierunku namagnesowania warstwy zamocowanej (osiągnięcie dwóch wyraźnie
rozróżnialnych stanów rezystancyjnych).
W chwili obecnej prace nad zastosowaniem magnetycznych złącz tunelowych
wykorzystujących efekt TMR, koncentrują się przede wszystkim na badaniach zjawiska
przełączania magnetyzacji za pomocą spinowo spolaryzowanych elektronów (Current
Induced Magnetization Switching – CIMS). Wykorzystując efekt CIMS firma Toshiba w
2010 roku skonstruowała 64 Mb prototyp pamięci STT-RAM.
[125] S. Yuasa, D. D. Djayaprawira, Giant tunnel magnetoresistance in magnetic tunnel
junctions with a crystalline MgO(0 0 1) barrier, J. Phys. D: Appl. Phys. 40 (2007) R337
[126] S. Ikeda, J. Hayakawa, Y. Min Lee, F. Matsukura, Y. Ohno, T. Hanyu, H. Ohno,
Magnetic Tunnel Junctions for Spintronic Memories and Beyond, IEEE Transactions on
electron Devices, 54, no. 5 (2007) 991
[127] S. Parkin, X Jiang, C. Kaiser, A. Panchula, K. Roche, M. Samant, Magnetically
engineered spintronic sensors and memory, Proceedings of The IEEE, 91 No. 5 (2003) 661
[128] R. Waser, Nanoelectronics and Information Technology, WILEY-VCH Verlag GmbH
& Co. KGaA, Weinheim 2003, rozdział 5
[129] William C. Black, B. Das, Programmable logic using giant-magnetoresistance and
spin-dependent tunneling devices, J. Appl. Phys. 87 (2000) 6674
[130] A. Ney, C. Pampuch, R. Koch & K. H. Ploog, Programmable computing with a single
magnetoresistive element, Nature 425 (2003) 485
[131] G. Reiss, H. Brückl, D. Meyners, R. Richter, J. Wecker, Arrays of magnetic tunnelling
junctions for field programmable logic gates, Journal of Magnetism and Magnetic Materials
272–276 (2004) e1497
[132] R. Richter, L. Bär, J. Wecker, G. Reiss, Nonvolatile field programmable spin-logic for
reconfigurable computing, Applied Physics Letters 80 No. 7 (2002) 1291

-142-
Skorowidz AMR .................... 8, 11, 18, 30, 31, 36, 125 analiza fazowa ......................................... 77 anizotropia jednoosiowa . 11, 12, 16, 17, 18,
28, 37, 42, 62, 64, 109 anizotropia magnetorezystancji ............... 13 anomalny efekt Halla .................. 11, 20, 22 antyferromagnetyk ........ 49, 51, 61, 64, 112 blattnerphone ......................................... 121 charakterystyki prąd - napięcie .... 104, 105,
106 charakterystyki prąd – napięcie ............. 112 czujnik GMR ................................. 135, 137 czułość ................................. 35, 40, 43, 101 dyfrakcja rentgenowska .. 69, 71, 74, 76, 78,
94, 96 efekt Kerra ..................... 101, 102, 103, 104 exchange bias ... 47, 49, 51, 52, 55, 64, 104,
112 exchange-bias zawór spinowy ..... 94, 95, 96 ferromagnetyk ....................... 25, 27, 30, 51 figura biegunowa ....... 73, 74, 80, 83, 84, 85 fotorezyst ..................................... 65, 66, 67 Fotorezyst .......................................... 65, 66 geometria Bragga-Brentano .. 72, 73, 74, 75 geometria wiązki równoległej ..... 72, 74, 75 gęstość energii ............................... 109, 110 gęstość prądu ......................... 12, 13, 14, 15 głowica indukcyjno-magnetorezystancyjna
........................................................... 132 GMR ..... 7, 8, 11, 30, 31, 33, 34, 35, 36, 40,
44, 46, 104, 105, 113, 125, 134, 135, 136, 137
koło Eulera .............................................. 73 konfiguracja CIP ................................... 105 konfiguracja CPP ................................... 105 lift-off ...................................................... 68 litografia elektronowa ................. 66, 67, 68 litografia optyczna ......... 65, 66, 67, 68, 104 magnetometr Kerra ................ 101, 104, 107 magnetometr R-VSM ..... 99, 100, 101, 103,
104, 107 magnetorezystancja 8, 9, 11, 13, 14, 15, 16,
18, 19, 20, 30, 31, 32, 33, 34, 35, 36, 39, 40, 43, 46, 48, 91, 105, 106
magnetyczne złącza tunelowe .... 44, 45, 46, 47, 48, 49, 50, 51, 58, 59, 61, 63, 67, 68,
69, 83, 85, 88, 91, 92, 93, 104, 106, 117, 118, 139, 140, 141
maska ................................................ 65, 75 metoda CIMS ................................ 105, 141 metoda MBE ..................................... 59, 91 metoda rozpylania jonowego .................. 59 mikroskop sił atomowych ........... 87, 88, 89 mikroskop skaningowy ..... 67, 93, 134, 135 model dwuprądowy................................. 30 model jednodomenowy 109, 110, 111, 114,
117 model RKKY .................................... 25, 26 M-RAM ............ 7, 46, 49, 62, 66, 139, 140 namagnesowanie nasycenia .................... 20 nanoelektronika ................................... 7, 91 nano-generatory ........................................ 9 nano-oscylatory ......................................... 9 nanostrukturyzacja ...................... 7, 71, 130 nanotechnologia ................................ 7, 132 nano-urządzenia ........................................ 7 napięcie Halla ......................................... 24 normalny efekt Halla .............................. 20 odczyt magnetyczny ....... 47, 132, 134, 139 orange peel ........................................ 50, 88 oś trudna .................................... 18, 19, 110 paskowy detektor krzemowy .................. 72 patterned media ............................. 124, 130 pętla histerezy 37, 48, 49, 51, 99, 104, 105,
106, 110, 112, 113, 114, 117 piko-slider ............................. 132, 133, 134 podłoże ... 52, 59, 61, 62, 68, 77, 79, 83, 84,
85, 86, 93, 99, 101, 104, 128 pomiar 2θ ................................................ 78 pomiar θ-2θ ... 76, 77, 79, 81, 82, 83, 85, 95 pomiar ω ............................... 79, 80, 83, 84 program MAGPAR ............................... 119 program OOMMF ................. 116, 118, 119 pseudo zawór spinowy . 92, 94, 95, 96, 117,
118, 119 RA product .................................. 67, 92, 93 reflektometria .................. 74, 81, 85, 86, 88 reguły Onsagera ...................................... 13 reprogramowalne układy logiczne ............ 7 rozkład Fermiego-Diraca ........................ 26 rozkład Gaussa .................................. 77, 80 rozpylanie katodowe ............................... 59 równanie LLG ....................... 116, 118, 120

-143-
signal to noise S/N ................................. 126 skaningowy mikroskop elektronowy ...... 67 spin ............................................................ 7 spintronika ......................................... 7, 8, 9 sprzężenie antyferromagnetyczne .... 28, 29,
32, 33, 35, 38, 112 sprzężenie spin-orbita ........................ 16, 21 sprzężenie wymienne ................ 25, 28, 117 stała Halla .................................... 20, 21, 25 struktura AAF ................................ 113, 114 struktura bottom ...................................... 49 struktura top ............................................. 49 strumień pola magnetyczny ................... 128 STT .................................. 7, 8, 92, 117, 141 STT-oscylatory ........................................ 92 STT-RAM ....................... 7, 8, 92, 117, 141 SV-MTJ ........................................... 49, 139 symulacje numeryczne .......................... 109 szczelin Sollera .................................. 74, 75 szczelina antyrozproszeniowa ................. 75 szczelina dywergencyjna ............. 73, 74, 75 szczelina odbiorcza ................................. 75 szorstkości topologiczne ................... 87, 88 szorstkość interfejsów ....................... 85, 88 telegrafon ............................................... 121 thermally assisted recording .......... 130, 131
TMR7, 8, 11, 46, 48, 52, 63, 64, 65, 88, 89, 90, 91, 92, 93, 94, 96, 105, 125, 135, 140, 141
twardy dysk ................. 8, 62, 123, 128, 137 układy wielowarstwowe ... 7, 25, 30, 69, 96 walkman ................................................ 123 warstwa swobodna ... 11, 18, 36, 37, 38, 40,
42, 43, 44, 47, 48, 49, 50, 61, 64, 88, 106, 113, 136, 139, 140
warstwa zamocowana .... 36, 38, 40, 43, 44, 47, 48, 49, 50, 51, 52, 53, 82, 83, 88, 90, 107
wytrawianie jonowe .......................... 65, 66 zakaz Pauliego ........................................ 14 zapis magnetyczny121, 122, 124, 125, 126,
127, 128, 129, 130, 132, 138, 139 zapis podłużny .............................. 128, 129 zapis prostopadły 8, 13, 23, 76, 78, 81, 113,
128, 129, 130 zawór spinowy ... 11, 36, 37, 38, 39, 40, 41,
42, 43, 46, 47, 48, 49, 50, 64, 94, 95, 104, 112, 113, 114, 125, 134, 135, 136
złącze tunelowe z barierą Al-O ... 61, 64, 92 złącze tunelowe z barierą MgO . 63, 91, 92,
93, 94, 96