user´s guide: bml-s1c0-q53 -m400- 0-ka de | en | it | fr | es · bml-s1c0-q53_-m400-_0-ka_ _...
TRANSCRIPT

BML-S1C0-Q53_-M400-_0-KA_ _
Betriebsanleitungdeutsch
Balluff GmbHSchurwaldstraße 973765 Neuhausen a.d.F.DeutschlandTel. +49 7158 173-0Fax +49 7158 5010Servicehotline +49 7158 [email protected]

BML-S1C0-Q53_-M400-_0-KA_ _Magnetband-Längenmesssystem
deutsch2
Lesen Sie diese Anleitung, bevorSie den Wegsensor installieren undin Betrieb nehmen.
1.1 BestimmungsgemäßeVerwendung
Der Wegsensor BML wird zu seinerVerwendung in eine Maschine oderAnlage eingebaut. Er bildet zusam-men mit einer Steuerung (SPS) einLängenmesssystem und darf nur fürdiese Aufgabe eingesetzt werden.
Unbefugte Eingriffe und unzulässigeVerwendung führen zum Verlust vonGarantie- und Haftungsansprüchen.
1.2 Qualifiziertes Personal
Diese Anleitung richtet sich anFachkräfte, die den Einbau, die In-stallation und das Einrichten aus-führen.
1 Sicherheitshinweise
1.3 Einsatz und Prüfung
Für den Einsatz des Wegsensorssind die einschlägigen Sicher-heitsvorschriften zu beachten.Insbesondere müssen Maßnahmengetroffen werden, dass bei einemDefekt des Wegsensors keine Ge-fahren für Personen und Sachenentstehen können. Hierzu gehörender Einbau zusätzlicher Sicherheits-endschalter, Notaus-Schalter unddie Einhaltung der zulässigen Um-gebungsbedingungen.Wegsensoren BML dürfen nicht inlebensrettenden System, in Flug-zeugen usw. eingesetzt werden.
1.4 Gültigkeit
Diese Anleitung gilt für die Weg-sensoren vom TypBML-S1C0-...-KAxx.
Eine Übersicht über die verschiede-nen Versionen finden Sie im Kapi-tel 11 Ausführungen (Angaben aufdem Typenschild).
Emissionsprüfungen:Funkstörstrahlung
EN 55011 Gruppe 1, Klasse A+BStörfestigkeitsprüfungen:Statische Elektrizität (ESD)
EN 61000-4-2 Schärfegrad 3Elektromagnetische Felder (RFI)
EN 61000-4-3 Schärfegrad 3Schnelle, transiente Störimpulse
(Burst)EN 61000-4-4 Schärfegrad 3
Stoßspannungen (Surge)EN 61000-4-5 Schärfegrad 2
Leitungsgeführte Störgrößen, indu-ziert durch hochfrequente Felder
EN 61000-4-6 Schärfegrad 3Magnetfelder
EN 61000-4-8 Schärfegrad 4
Mit dem CE-Zeichenbestätigen wir, dassunsere Produkte den
Anforderungen der EG-Richtlinie
89/336/EWG (EMV-Richtlinie)
und des EMV-Gesetzes entspre-chen. In unserem EMV-Labor, dasvon der DATech für Prüfungen derelektromagnetischen Verträglich-keit akkreditiert ist, wurde derNachweis erbracht, dass dieBalluff-Produkte die EMV-Anforde-rungen der folgenden Fachgrund-normen erfüllen:
EN 61000-6-4 (Emission)
EN 61000-6-2 (Störfestigkeit)
Inhaltsverzeichnis
1 Sicherheitshinweise ............. 21.1 Bestimmungsgemäße
Verwendung ........................... 21.2 Qualifiziertes Personal ............ 21.3 Einsatz und Prüfung ............... 21.4 Gültigkeit ................................ 2
2 Funktion, Eigenschaften ...... 32.1 Eigenschaften......................... 32.2 Funktionsweise ...................... 32.3 Schnittstellensignale .............. 3
3 Einbau Sensor ...................... 43.1 Einbau Sensor u. Maßkörper
(Linearbewegung) ................... 4Abstände, Toleranzen ............. 4Sensorkopf montieren ............ 5
3.2 Einbau Sensor u. Magnetring(Drehbewegung) ..................... 5
4 Anschlüsse............................ 64.1 Kabelbelegung ....................... 64.2 Schnittstellen ......................... 6
5 Passendes System ausBML u. Steuerung wählen ... 7
5.1 BML ermitteln ......................... 75.2 Steuerung ermitteln ................ 75.3 BML-System mit Magnetring .... 8
6 Inbetriebnahme .................... 96.1 System einschalten ................ 96.2 Systemfunktion prüfen ........... 96.3 Regelmäßige Prüfung ............. 96.4 Funktionsstörung ................... 9
7 Zubehör ................................. 97.1 Abdeckband ........................... 98 Fehlerbehebung ................. 109 Technische Daten ............... 1110 Lieferumfang....................... 1111 Ausführungen (Angaben
auf dem Typenschild) ......... 12

BML-S1C0-Q53_-M400-_0-KA_ _Magnetband-Längenmesssystem
3deutsch
2 Funktion und Eigenschaften
Das BML ist ein berührungsloses, inkrementales Wegmesssystem, bestehendaus einem Sensorkopf und einem Maßkörper. Die Messfunktion wird übermagnetische Abtastung realisiert.
Bild 2-1: Längenmesssystem mit Inkrementalsensoren
Inkremental- sensoren
Maßkörper mit abwechselndNord- und Südpolen
Sensorkopf
2.1 Eigenschaften
Wegmesssysteme BML zeichnensich aus durch:– Hohe Systemgenauigkeit bis zu
100 µm– Hohe Auflösung bis zu 100 µm– Hohe Wiederholgenauigkeit von
±1 Inkremente– Hohe Verfahrgeschwindigkeit bis
10 m/s– Positionssignal in Echtzeit– Unempfindlich gegenüber Er-
schütterungen, Vibrationen, Ver-schmutzungen, wie Staub, Öl
– Verschleiß- und wartungsfrei– Sehr robust– Schutzart IP 67 nach IEC 60529
2.2 Funktionsweise
Der Sensorkopf wird am Maschinen-teil montiert, dessen Position be-stimmt werden soll, während dermagnetische Maßkörper entlang derMessstrecke befestigt wird. Aufdem Maßkörper befinden sich ab-wechselnd magnetische Nord- undSüdpole.
Die beiden Inkrementalsensoren imSensorkopf messen das magneti-sche Wechselfeld.
Beim berührungslosen Überfahrendes Maßkörpers tasten die beidenInkrementalsensoren im Sensorkopfdie magnetischen Periodenab und die Steuerung kann so denzurückgelegten Weg ermitteln.
2.3 Schnittstellensignale
Der Sensorkopf wandelt die Signa-le der Inkrementalsensoren in digi-tale A/B-Impulse um und überträgtdiese an die Steuerung.
Die beiden digitalen Impulse A undB sind elektrisch um 90° phasen-versetzt, das Vorzeichen der Pha-senverschiebung hängt von derBewegungsrichtung des Sensorsab (Bild 2-2).
Jeder Flankenwechsel von A oderB ist für den Periodenzähler (Up/down-Zähler) ein Zählschritt. Beivoreilendem Signal A nimmt derZählerstand zu, bei voreilendemSignal B nimmt er ab. Die Steue-rung kennt also zu jedem Zeitpunktdie inkrementgenaue Position, ohneden Sensor periodisch abfragen zumüssen (Echtzeitfähigkeit).
Achtung, für eine korrekte Funk-tion muss das A- und B-Signalrichtungsabhängig ausgewertetwerden.
Bild 2-2: Ausgangssignale BML mit Periodenzähler
Signal A
Signal B
Inkrement
Bewegungsrichtung
Zählerstand
vorwärts rückwärts
BML-S1C0-Q53_-M400-_0-KA_ _Magnetband-Längenmesssystem
deutsch4
3 Einbau Sensor
Beim Einbau unbedingt zubeachten:
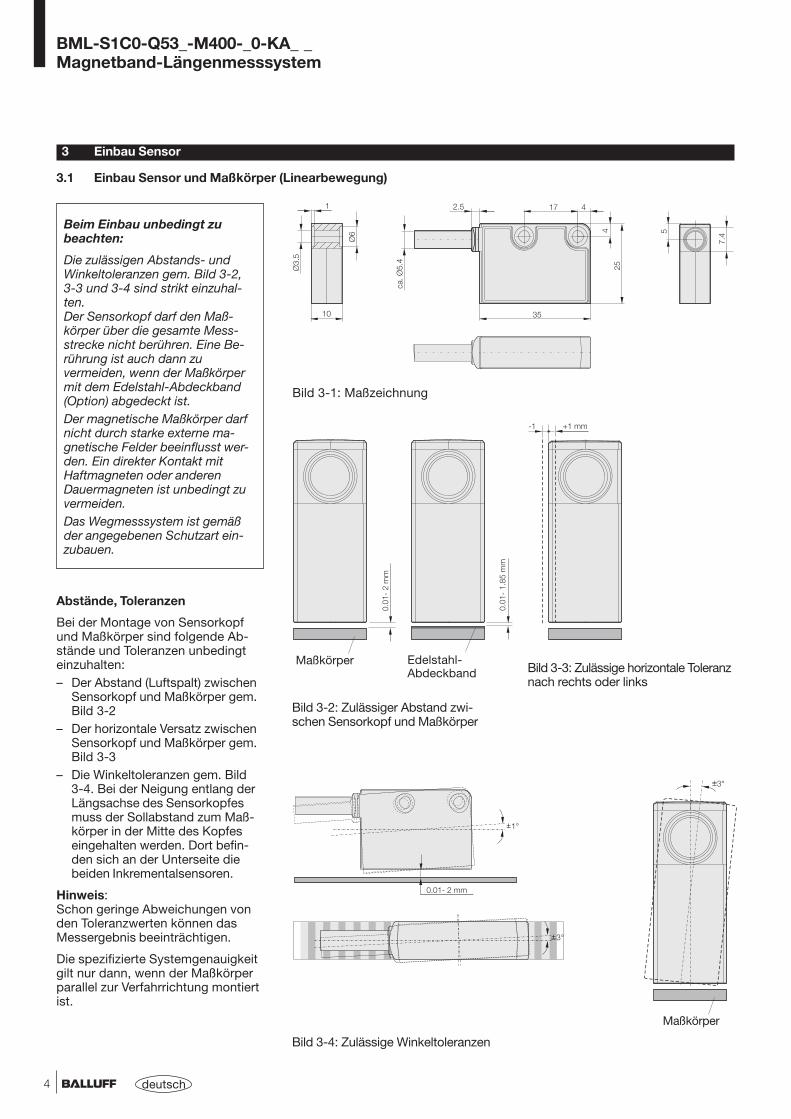
Die zulässigen Abstands- undWinkeltoleranzen gem. Bild 3-2,3-3 und 3-4 sind strikt einzuhal-ten.Der Sensorkopf darf den Maß-körper über die gesamte Mess-strecke nicht berühren. Eine Be-rührung ist auch dann zuvermeiden, wenn der Maßkörpermit dem Edelstahl-Abdeckband(Option) abgedeckt ist.Der magnetische Maßkörper darfnicht durch starke externe ma-gnetische Felder beeinflusst wer-den. Ein direkter Kontakt mitHaftmagneten oder anderenDauermagneten ist unbedingt zuvermeiden.Das Wegmesssystem ist gemäßder angegebenen Schutzart ein-zubauen.
Abstände, Toleranzen
Bei der Montage von Sensorkopfund Maßkörper sind folgende Ab-stände und Toleranzen unbedingteinzuhalten:– Der Abstand (Luftspalt) zwischen
Sensorkopf und Maßkörper gem.Bild 3-2
– Der horizontale Versatz zwischenSensorkopf und Maßkörper gem.Bild 3-3
– Die Winkeltoleranzen gem. Bild3-4. Bei der Neigung entlang derLängsachse des Sensorkopfesmuss der Sollabstand zum Maß-körper in der Mitte des Kopfeseingehalten werden. Dort befin-den sich an der Unterseite diebeiden Inkrementalsensoren.
Hinweis:Schon geringe Abweichungen vonden Toleranzwerten können dasMessergebnis beeinträchtigen.
Die spezifizierte Systemgenauigkeitgilt nur dann, wenn der Maßkörperparallel zur Verfahrrichtung montiertist.
Bild 3-1: Maßzeichnung
Maßkörper
Bild 3-4: Zulässige Winkeltoleranzen
Bild 3-2: Zulässiger Abstand zwi-schen Sensorkopf und Maßkörper
Maßkörper Edelstahl-Abdeckband Bild 3-3: Zulässige horizontale Toleranz
nach rechts oder links
3.1 Einbau Sensor und Maßkörper (Linearbewegung)

BML-S1C0-Q53_-M400-_0-KA_ _Magnetband-Längenmesssystem
5deutsch
3 Einbau Sensor (Fortsetzung)
Sensorkopf montieren
Der Sensorkopf ist mit seiner rech-ten oder linken Seite mit M3-Schrauben am Maschinenteil zubefestigen, dessen Position be-stimmt werden soll.
Wichtig!Auf das Kabel am Gehäuse darfkeine Kraft einwirken. Versehen Siedas Kabel mit einer Zugentlastung.
Hinweis:
Ausführliche technische Beschrei-bung und Montageanleitung fürMaßkörper siehe Maßkörper-Be-triebsanleitung unterwww.balluff.com
Empfehlung zur Wahl des Maß-körpers
Maßkörper BML-M02-I46 oderMagnetringe
3.2 Einbau Sensor und Magnetringe (Drehbewegung)
Beim Einbau unbedingt zubeachten:
Die zulässigen Abstands- undVersatztoleranzen gem. Bild 3-5,3-6 und 3-7 sind strikt einzuhalten.Der Sensorkopf darf den Magnet-ring nicht berühren.Der Magnetring darf nicht durchstarke externe magnetische Felderbeeinflusst werden.
Bild 3-5: Zulässiger Abstand Bild 3-6: Zulässiger axialer Versatz Bild 3-7: Zulässiger Tangentialversatz
Ein direkter Kontakt mit Haft-magneten oder anderen Dauer-magneten ist unbedingt zu vermei-den.Das Wegmesssystem ist gemäß derangegebenen Schutzart einzubau-en.
Der Sensor kann in Bezug auf denMagnetring mit dem Kabelabgangnach rechts oder nach links mon-tiert werden (Bild 3-6).
Hinweis:
Ausführliche technische Beschrei-bung und Montageanleitung fürMagnetringe siehe Betriebsanlei-tung unter www.balluff.com
Inkremental- sensoren
Sicht aufRückseitemit Kabel
Sicht aufStirnseite
BML-S1C0-Q53_-M400-_0-KA_ _Magnetband-Längenmesssystem
deutsch6
4 Anschlüsse
Beim elektrischen Anschlussunbedingt zu beachten:
Anlage und Schaltschrankmüssen auf dem gleichenErdungspotenzial liegen.
Um die elektromagnetische Ver-träglichkeit (EMV) zu gewährlei-sten, die die Fa. Balluff mit demCE-Zeichen bestätigt, sind nach-folgende Hinweise unbedingt zubeachten.
Auf der Seite der Steuerung mussder Kabelschirm geerdet, d.h. mitdem Schutzleiter verbunden wer-den.
Beim Verlegen des Kabels zwi-schen Wegaufnehmer, Steuerungund Stromversorgung ist die Nähevon Starkstromleitungen wegender Einkopplung von Störungen zumeiden.Besonders kritisch sind Ein-streuungen durch Netzoberwellen(z.B. von Phasenanschnittsteue-
rungen), für die der Kabelschirmnur geringen Schutz bietet.
Länge des Kabels max. 20 m;Litzenquerschnitt min. 0,14 mm2,max.0,5 mm2. Längere Kabel sindeinsetzbar, wenn durch Aufbau,Schirmung und Verlegung fremdeStörfelder wirkungslos bleiben.Unbedingt zu beachten:Trotz Spannungsabfall in der Zulei-tung muss am Sensor eine Nenn-betriebsspannung von 10 bis 30 Vgewährleistet werden.
4.1 Kabelbelegung
Kabel Signal
WH weiß A
GN grün B
BU blau GND
RD rot 10...30 V
BK schwarz Schirm
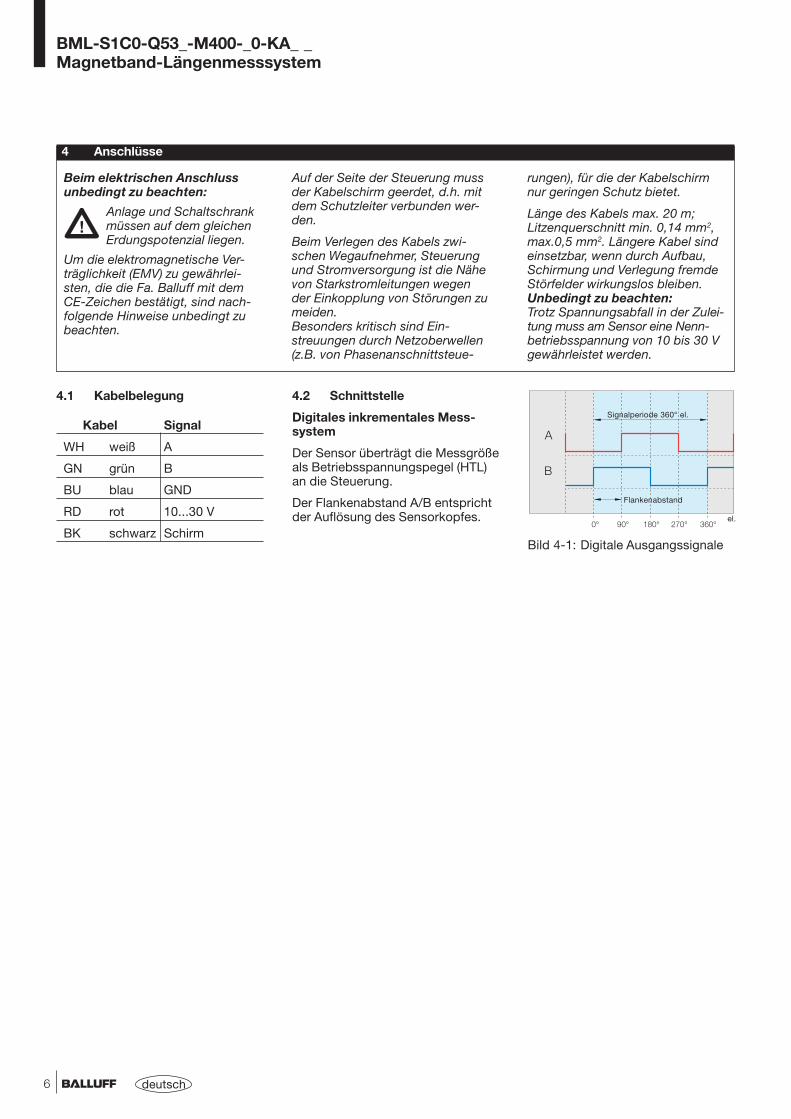
4.2 Schnittstelle
Digitales inkrementales Mess-system
Der Sensor überträgt die Messgrößeals Betriebsspannungspegel (HTL)an die Steuerung.
Der Flankenabstand A/B entsprichtder Auflösung des Sensorkopfes.
Bild 4-1: Digitale Ausgangssignale
Signalperiode 360° el.
el.
Flankenabstand

BML-S1C0-Q53_-M400-_0-KA_ _Magnetband-Längenmesssystem
7deutsch
5 Passendes System aus BML und Steuerung wählen
5.1 Geeignetes BML-System fürdie vorhandene Steuerungermitteln (Linearbewegung)
Beispiel (siehe Tabelle 5-1)Annahmen:– Ihre Steuerung kann einen min.
Flankenabstand von 60 µs er-kennen. Falls es kein BML mitdiesem min. Flankenabstandgibt, wählen Sie ein BML mitgrößerem Flankenabstand
– Die max. Verfahrgeschwindigkeitdes Systems soll 2 m/s betragen.
Ermittlung des geeigneten BML:– Sie benötigen ein BML mit min.
Flankenabstand 100 µs (Typ-Kennung R)
– Um max. 2 m/s fahren zu kön-nen, wählen Sie den Typ mit derAuflösung 500 µm (Typ-Kennung N)
Die Tabelle 5-1 zeigt den Zusam-menhang zwischen dem min.Flankenabstand, der Auflösung undder max. Verfahrgeschwindigkeit fürBML-Systeme mit magnetischemMaßkörper.
Wichtig!Die Steuerung/Anzeige muss die inden Tabellen angegebenen minima-len zeitlichen Flankenabstände zäh-len können (Beachten Sie die Zähl-frequenz Ihrer Steuerung). Der min.Flankenabstand kann wegen desinternen Interpolationsverfahrens so-gar im Stillstand auftreten.
5.2 Geeignete Steuerung für dasvorhanden BML-Systemermitteln (Linearbewegung)
Welche max. Zählfrequenz muss dieSteuerung haben? Die Periode desEingangssignals ist der 4-facheFlankenabstand (siehe Bild 4-1).Die max. Frequenz des Eingangs-signals beträgt dann 1/ (4 xFlankenabstand). Bei 4-fach Aus-wertung beträgt die max. Zähl-frequenz der Steuerung 1/Flanken-abstand.
Beispiel:Bei BML-Typ M mit Flankenabstand10 µs beträgt die max. Frequenzdes Eingangssignals 1/(4x10 µs) =25 kHz. Die max. Zählfrequenz beieiner 4-fach Auswertung = 1/10 µs =100 kHz.
Beim BML ist die maximale Verfahrgeschwindigkeit abhängig vom min.Flankenabstand und von der mechanischen Auflösung (siehe Tabelle 5-1).In der Tabelle ist mit X der min. zeitliche Flankenabstand des BML-Typs ge-kennzeichnet und mit Y die mechanische Auflösung (siehe Typschlüssel).
Tabelle 5-1: Zusammenhang zwischen min. Flankenabstand, mech. Auflö-sung und max. Verfahrgeschwindigkeit
min. Flankenabstand X:M = 10 µs R = 100 µs
Auflösung Y Vmax entsprechend Flankenabstand und Auflösung
L = 100 µm 8 m/s 0,9 m/s
M = 200 µm 10 m/s 1,8 m/s
N = 500 µm 10 m/s 4,2 m/s
P = 1000 µm 10 m/s 8,8 m/s
R = 2000 µm 10 m/s 10 m/s
BML-S1C0-Q53L-M400-R0-KA05 (Typ-Beispiel)
min. Flankenabstand X (Kennung s. Tabelle)
mech. Auflösung Y (Kennung s. Tabelle)

BML-S1C0-Q53_-M400-_0-KA_ _Magnetband-Längenmesssystem
deutsch8
Die Tabelle 5-2 zeigt den Zusam-menhang der mechanischen Auflö-sung und den Impulsen/Umdrehungfür BML-Systeme mit Magnetringen.
Schritt 1
Entscheiden Sie zunächst, wievielImpulse pro Umdrehung Ihre An-wendung benötigt. Daraus leitetsich der Magnetring-Außendurch-messer und die Auflösung desSensorkopfes bzw. der Sensorkopf-Typ ab.
Die Tabelle 5-2 zeigt für jedenMagnetring den Zusammenhangzwischen der Anzahl der Impulse jeUmdrehung und der Auflösung desSensorkopfes.
Beispiel (siehe Tabelle 5-2):– Die Anwendung benötigt 500
Impulse/Umdrehung.– Diese Impulse werden geliefert
vom BML-System bestehend auseinem Sensorkopf mit der Auflö-sung 200 µm (Typ-Kennung M)und einem Magnetring BML.-M2x...031.
5.3 Auflösung und max. Drehzahl bei BML-Systemen mit Magnetring ermitteln (Drehbewegung)
Schritt 2
Falls die Drehzal Ihrer Anwendungfeststeht, wählen Sie (ausgehendvon dem in Schritt 1 gewähltenMagnetring und der Auflösung) denSensorkopf mit dem min. Flanken-abstand, der der festgelegtenImpulszahl/U entspricht.
Beispiel :
Annahmen:– Die festgelegte Impulszahl be-
trägt 500/U (siehe Schritt 1: RingBML-M2x...031 und BML-Auflö-sung 200 µm).
– Die max. Drehzahl soll 900 min-1
betragen.
Tabelle 5-2: Impulse/U des Systems aus BML-S1C... und Magnetringen
Magnetringtyp BML-M2...031/... BML-M2...048/... BML-M2...072/...
Anzahl Pole 20 32 46
Auflösung Y Impulse pro UmdrehungSensorkopf bei 4fach-Auswertung
L = 100 µm 1.000 1.600 2.300
M = 200 µm 500 800 1.150
N = 500 µm 200 320 460
P = 1000 µm 100 160 230
R = 2000 µm 50 80 115
Ermittlung des geeigneten BML-Sensorkopfes (siehe Tabelle 5-3):– Suchen Sie in der Spalte
"M = 200 µm, 500 Impulse" jeneZeile,deren Drehzahl größer istals die geforderte Drehzahl.Geeignet ist der Sensorkopf mitdem Flankenabstand 100 µm(Typ-Kennung R).Zusammen mit dem MagnetringBML-M2x...031 erfüllt er die Sy-stem-Anforderungen.
Tabelle 5-3:Max. Drehzahlen in Abhängigkeit vom minimalen Flankenabstand und der mechanischen Auflösung bei MagnetringBML-M2x...031 mit Außendurchmesser 31 mm
mech. Auflösung Y L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Impulse/Umdrehung 1000 500 200 100 50
min Flankenabst. X max. kHz A/B-Sig max. Drehzahl bei Magnetring BML-M2x...031...
M = 10 µs 25 4.800 6.000 6.000 6.000 6.000
R = 100 µs 25 540 1.080 2.520 5.280 6.000
Die Tabellen 5-3 bis 5-5 zeigen denZusammenhang zwischen dem min.Flankenabstand, der mechanischenAuflösung und der max. Drehzahlfür BML-Systeme mit Magnetringen.
BML-S1C0-Q53L-M400-R0-KA05 (Typ-Beispiel)
min. Flankenabstand X(Kennungen siehe Tabelle 5-3 bis 5-5)
mech. Auflösung Y(Kennungen siehe Tabelle 5-3 bis 5-5)
Beispiel:
5 Passendes System aus BML und Steuerung wählen

BML-S1C0-Q53_-M400-_0-KA_ _Magnetband-Längenmesssystem
9deutsch
Tabelle 5-4:Max. Drehzahlen in Abhängigkeit vom minimalen Flankenabstand und der mechanischen Auflösung bei MagnetringBML-M2x...048 mit Außendurchmesser 48 mm
mech. Auflösung Y L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Impulse/Umdrehung 1600 800 320 160 80
min Flankenabst. X max. kHz A/B-Sig max. Drehzahl bei Magnetring BML-M2x...048...
M = 10 µs 25 3.000 3.750 3.750 3.750 3.750
R = 100 µs 25 338 675 1.575 3.300 3.750
Tabelle 5-5:Max. Drehzahlen in Abhängigkeit vom minimalen Flankenabstand und der mechanischen Auflösung bei MagnetringBML-M2x...072 mit Außendurchmesser 72 mm
mech. Auflösung Y L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Impulse/Umdrehung 2300 1150 460 230 115
min Flankenabst. X max. kHz A/B-Sig max. Drehzahl bei Magnetring BML-M2x...072...
M = 10 µs 25 2.087 2.609 2.609 2.609 2.609
R = 100 µs 25 235 470 1.096 2.296 2.609
6 Inbetriebnahme
6.1 System einschalten
Beachten Sie, dass das Systembeim Einschalten unkontrollierte Be-wegungen ausführen kann, insbe-sondere beim ersten Einschaltenund wenn die Längenmessein-richtung Teil eines Regelsystems ist,dessen Parameter noch nicht einge-stellt sind. Stellen Sie daher sicher,dass hiervon keine Gefahren ausge-hen können.
6.2 Systemfunktion prüfen
Nach der Montage des Wegmess-systems oder dem Austausch desSensorkopfes prüfen Sie sämtlicheFunktionen wie folgt:1. Die Versorgungsspannung des
Sensorkopfes einschalten.2. Den Sensorkopf entlang der ge-
samten Messstrecke/Anzahl Um-drehungen verfahren.
3. Prüfen, ob alle Signale ausgege-ben werden.
4. Prüfen, ob die Zählrichtung mitder Verfahr-/Drehrichtung über-einstimmt.Falls dies nicht zutrifft, die beidenAnschlüsse A und B vertauschen.
7.1 Abdeckband(getrennt zu bestellen)
Um den linearen Maßkörper vorBeschädigung z. B. durch Späneoder Chemikalien zu schützen, kanndieser mit einem Abdeckband ausEdelstahl überklebt werden.Beachten Sie, dass sich der zulässi-ge Luftspalt zwischen Sensorkopfund Maßband um die Dicke desAbdeckbandes mit Klebefolie(0,15 mm) verringert (Bild 3-2).Vor dem Aufkleben des Abdeck-bandes die Oberfläche des Maß-körpers sorgfältig reinigen (Aceton,sanfter Kunststoffreiniger, Terpentin,kein Benzin).
Liefervarianten:1 Abdeckband und Maßkörper
können zusammen in passenderLänge bestellt werden.
2 Das Abdeckband kann getrenntin 4 definierten Längen bestelltwerden.
7 Zubehör
6.3 Regelmäßige Prüfung
Die Funktionsfähigkeit desMesssystems und aller damit ver-bundenen Komponenten ist regel-mäßig zu überprüfen und zu proto-kollieren.
6.4 Funktionsstörung
Wenn Anzeichen erkennbar sind,dass das Messsystem nicht ord-nungsgemäß arbeitet, ist es außerBetrieb zu nehmen und gegen un-befugte Benutzung zu sichern (sie-he auch Fehlerbehebung).
Hinweis:
Ausführliche technische Beschrei-bung und Bestellschlüssel für Ab-deckband siehe Maßkörper-Be-triebsanleitung unterwww.balluff.com
5 Passendes System aus BML und Steuerung wählen

BML-S1C0-Q53_-M400-_0-KA_ _Magnetband-Längenmesssystem
deutsch10
8 Fehlerbehebung
Fehler
Die Steuerung erhält (stellenweise)keine Weginformation.
Die Steuerung erhält an bestimmtenStellen keine Weginformation.
Positionssignal rauscht sehr stark
Die Linearitätsabweichung liegtaußerhalb der Toleranz.
Mögliche Ursachen
Die notwendige Spannungs-versorgung ist nicht vorhanden.
Der Spannungsabfall ist zu groß.
Leitungen sind nicht richtig ange-schlossen.
Der Abstand zwischen Sensorkopfund Maßkörper ist (stellenweise)falsch.
Die Magnetpole des Maßkörperssind stellenweise durch starke Ma-gnete beschädigt.
Abstand zwischen Sensorkopf undMaßkörper ist zu groß.
Der Sensorkopf bewegt sich nichtparallel zum Maßkörper (Toleranzsiehe Bild 3-4).Der Abstand zwischen Sensorkopfund Maßkörper ist zu groß.
Fehlerbehebung/Erläuterung
Prüfen, ob Spannung anliegt und obdas BML richtig angeschlossen ist.
Das Wegmesssystem muss eineBetriebsspannung von 10...30 Vaufweisen.
Leitungen anhand der Schaltbilderprüfen.
Den Sensorkopf in der Höhe justie-ren. Zur Prüfung den Kopf von Handüber die gesamte Messstrecke ver-fahren.
Maßkörper auswechseln.
Den Sensorkopf in geringerem Ab-stand zum Maßkörper befestigen.
Den Sensorkopf korrekt positionie-ren (Kap. 3).

BML-S1C0-Q53_-M400-_0-KA_ _Magnetband-Längenmesssystem
11deutsch
Elektrische DatenAusgangAusgangssignalAuflösungAusgangsspannungSystemgenauigkeitHysteresemax. Linearitätsabweichung (Lin 1)des Sensorkopfes unidirektionalmax. Linearitätsabweichung (Lin 2)des magnetischen Maßkörpersunidirektional, Messlänge max. 24 mmax. Linearitätsabweichung desGesamtsystems (Lin 1 + Lin 2)Temperaturkoeffizient des Gesamt-systems wie StahlMax. VerfahrgeschwindigkeitVerpolschutzÜberspannungsschutzBetriebsspannungStromaufnahmebei 10...30 V Betriebsspannungzulässige Schockbelastungnach IEC 60068-2-27 1
Dauerschocknach IEC 60068-2-29 1
zulässige Vibrationsbelastungnach IEC 60068-2-6 1
UmgebungsbedingungenBetriebstemperaturLagertemperaturSchutzart nach IEC 60529
Mechanische DatenAbstand Sensorkopf - MaßkörperGehäusewerkstoffAnschlussartGewicht
Typ BML-S1C0-Q53...Pegel der Versorgungsspannung (HTL)A-Signal, B-Signal (digitale Rechtecksignale)100 µm, 200 µm, 500 µm, 1000 µm, 2000 µmwie Betriebsspannung 10...30 V ohne A/B (HTL)±100 µm< 1 Inkrement±50 µm
±50 µm
±100 µm (Sensorkopf + Maßkörper)
10,5 x 10-6 K-1
10 m/sjanein10...30 V< 40 mA + Stromaufnahme der Steuerung (abhängig vom Innenwiderstand)
100 g/6 ms
100 g/2 ms
12 g, 10...2000 Hz
–20 °C...+80 °C–30 °C...+85 °CIP67
0,01...2 mmKunststoffKabel 4adrig, geschirmt (LIf12YFCF11Y 6×2×0,08 mm2)11 g ohne Kabel
9 Technische Daten
1 Einzelbestimmung nach Balluff-Werknorm
KabelTyp
Betriebstemperatur flexibel montiert fest montiertKabeldurchmesserBiegeradius Kabel flexibel montiert fest montiert
PU-Kabel 4-adrig, geschirmt,schleppkettenoptimiert
–20...80 °C–40...90 °C5,4 +0,2 mm
81 mm41 mm
10 Lieferumfang
SensorkopfKurzanleitung

BML-S1C0-Q53_-M400-_0-KA_ _Magnetband-Längenmesssystem
deutsch12
11 Ausführungen
Typenschlüssel für Sensorkopf (Angaben auf dem Typenschild)
BML - S1C0 - Q 5 3 L - M 4 0 0 -R 0 - KA05 (Beispiel)
Anschlussart: KA05 = Kabel 5 m Mögliche Kabellängen: 2, 5, 10, 15, 20 m
min. Flankenabstand: M = 10 µs R = 100 µs
Endschalter 0 = kein Endschalter
Referenzsignal 0 = kein Signal
Polbreite 4 = 5 mm
Auflösung (Flankenabstand A/B) L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Ausgangsspannung 3 = Pegel wie Betriebsspannung HTL
Betriebsspannung 5 = 24 V (10...30 V)
Nr.
848
735-
726
D •
01.
1083
92 •
Aus
gab
e 07
11;
Änd
erun
gen
vorb
ehal
ten
• E
rset
zt A
usga
be
0608

BML-S1C0-Q53_-M400-_0-KA_ _
User's Guideenglish
Balluff GmbHSchurwaldstrasse 973765 Neuhausen a.d.F.GermanyPhone +49 7158 173-0Fax +49 7158 5010Servicehotline +49 7158 [email protected]

BML-S1C0-Q53_-M400-_0-KA_ _Magnetic Linear Encoder System
english2
Read this manual before installingthe sensor and placing it inoperation.
1.1 Intended use
The BML displacement sensor isfitted into a machine or piece ofequipment for its application.Together with a controller (PLC) itcomprises a displacementmeasurement system and may beused only for this purpose.
Unauthorized modifications andnon-allowed use will result in loss ofguarantee and warranty.
1.2 Qualified personnel
This manual is intended fortechnical personnel who areinvolved in installation and setup.
1 Safety Advisories
1.3 Use and testing
Prevailing safety regulations andcodes must be observed for usingthe displacement sensor.In particular, measures must betaken to ensure that a defect in thedisplacement sensor will not resultin hazards to persons or equipment.This includes installation of additio-nal safety limit switches, emergencystop switches, and the maintainingof permissible ambient conditions.BML displacement sensors may notbe used in life-saving systems, inaircraft, etc.
1.4 Validity
This manual is applicable todisplacement sensors of typeBML-S1C0-...-KAxx.
An overview of the variousversions can be found in section 11"Versions" (refer to part label).
Emission tests:RF Emission
EN 55011 Group 1, Class A+BNoise immunity tests:Static electricity (ESD)
EN 61000-4-2 Severity level 3Electromagnetic fields (RFI)
EN 61000-4-3 Severity level 3Fast transients (Burst)
EN 61000-4-4 Severity level 3Surge
EN 61000-4-5 Severity level 2Line-induced noise induced byhigh-frequency fields
EN 61000-4-6 Severity level 3Magnetic fields
EN 61000-4-8 Severity level 4
The CE Mark verifiesthat our productsmeet the requirements
of EC Directive
89/336/EEC (EMC Directive)
and the EMC Law. Testing in ourEMC Laboratory, which isaccredited by DATech for TestingElectromagnetic Compatibility, hasconfirmed that Balluff productsmeet the EMC requirements of thefollowing Generic Standards:
EN 61000-6-4 (emission)
EN 61000-6-2 (noise immunity)
Content
1 Safety Advisories .................. 21.1 Intended use .......................... 21.2 Qualified personnel ................ 21.3 Use and testing ...................... 21.4 Validity .................................... 2
2 Function andCharacteristics ..................... 3
2.1 Characteristics ....................... 32.2 Principle of operation ............. 32.3 Interface signals ..................... 3
3 Sensor Installation ............... 43.1 Installing the sensor and tape
(linear motion) ......................... 4Distances, tolerances ............. 4Attaching sensor head ........... 5
3.2 Installing sensor and magnetring (rotary motion) ................. 5
4 Wiring .................................... 64.1 Cable assignments ................. 64.2 Interfaces ............................... 6
5 Selecting the Appropriate BMLand Controller System ........... 7
5.1 Selecting the BML .................. 75.2 Selecting the controller .......... 75.3 BML system with magnet ring .. 8
6 Startup................................... 96.1 Turn on system ....................... 96.2 Check system function........... 96.3 Regular checking ................... 96.4 Malfunction ............................ 9
7 Accessories .......................... 97.1 Cover strip .............................. 98 Troubleshooting .................. 109 Technical Data .................... 1110 Scope of Delivery ............... 1111 Versions (indicated
on part label) ....................... 12

BML-S1C0-Q53_-M400-_0-KA_ _Magnetic Linear Encoder System
3english
2 Function and Characteristics
The BML is a non-contact, incremental displacement feedback systemconsisting of a sensor head and a magnetic tape. The measuring function isaccomplished using magnetic sensing.
Fig. 2-1: Displacement system with incremental sensors
Incremental sensors
Tape with alternating northand south poles
Sensor head
2.1 Characteristics
BML displacement sensors arecharacterized by:– High system accuracy of 100 µm– High resolution of up to 100 µm– High repeat accuracy of ±1
increments– High traverse speed of up to
10 m/s– Position signal in real-time– Insensitive to shock, vibration,
and contamination such as dustand oil
– Wear- and maintenance-free– Rugged– Enclosure rating IP 67 per
IEC 60529
2.2 Principle of operation
The sensing head is attached to themachine member whose position isto be determined, while themagnetic tape is mounted along thedirection of travel. The tapecontains alternating magnetic north-and south poles.
The two incremental sensors in thesensing head measure the magneticalternating field.
As the sensing head travels over thetape the two incremental sensorspick up the magnetic periods sothat the controller can determine thedistance traveled.
2.3 Interface signals
The sensor head converts thesignals from the incrementalsensors into digital A/B pulses andsends them to the controller.
The two digital pulses A and B are90° phase-shifted, with the sign ofthe phase shift determined by thedirection of travel of the sensor (Fig.2-2).Each edge change from A or Brepresents a counting step for the
period counter (UP/DOWN counter).When Signal A is ahead, thecounting state increases, and whenSignal B is ahead the countdecreases. The controller thusalways knows the increment-preciseposition without having toperiodically poll the sensor (real-time capability).
Note, for correct function theA and B signals must beevaluated direction-dependent.
Fig. 2-2: BML output signals with period counter
Signal A
Signal B
Increment
Direction of motion
Counter state
Forwards Backwards

BML-S1C0-Q53_-M400-_0-KA_ _Magnetic Linear Encoder System
english4
3 Sensor Installation
Important installation notes:
The permissible distance andangle tolerances as per Figs. 3-2,3-3 and 3-4 must be strictlyobserved.The sensing head may not comein contact with the tape at anypoint along the travel. Contactmust still be avoided if thestainless steel cover (optional) isused.The magnetic tape must not besubjected to strong externalmagnetic fields. Direct contactwith holding solenoids or otherpermanent magnets must beavoided.The displacement measurementsystem must be installed inaccordance with the specifiedenclosure rating.
Clearances, tolerances
The following distances andtolerance must be observed wheninstalling the sensing head andtape:– The distance (air gap) between
sensing head and tape as perFig. 3-2
– The horizontal offset betweensensing head and tape as perFig. 3-3
– The angle tolerances as perFig. 3-4. Any tilt along the longitu-dinal axis of the sensing headmust still maintain the nominaldistance to the tape in the centerof the head. The two incrementalsensors are located there on theunderside.
Note: Even slight tolerancedeviations can affect the measuringresult.
The specified system accuracyapplies only if the tape is installedparallel to the direction of travel.
Fig. 3-1: Dimensional drawing
Magnetictape
Fig. 3-4: Permissible angle tolerances
Fig. 3-2: Permissible air gap betweensensor head and tape
Magnetictape
Stainlesssteel coverstrip
Fig. 3-3: Permissible horizontaltolerance right or left
3.1 Installing sensor and tape (linear motion)

BML-S1C0-Q53_-M400-_0-KA_ _Magnetic Linear Encoder System
5english
3 Sensor Installation (cont.)
Fitting the sensing head
The sensor head should be securedwith M3 screws, with its right or leftside against the machine partwhose position is to be determined.
Important!No forces allowed on the housingcable. Provide strain relief for thecable.
Note:
For a detailed technical descriptionand installation instructions fortapes, see User's Guide for tape atwww.balluff.com
Recommendation for selectingthe tape
Magnetic tape BML-M02-I46 ormagnet rings
3.2 Installing sensor and magnet rings (rotary motion)
Important installationnotes:
The permissible distance and angletolerances as per Figs. 3-5, 3-6 and3-7 must be strictly observed.The sensor head must not beallowed to touch the magnet ring.The magnetic tape must not besubjected to strong externalmagnetic fields.
Fig. 3-5: Permissible gap Fig. 3-6: Permissible tangential offset Fig. 3-7: Permissible tangential offset
Direct contact with holding soleno-ids or other permanent magnetsmust be avoided.The displacement measurementsystem must be installed inaccordance with the specifiedenclosure rating.
The sensor can be installed with thecable entry to the right or left withrespect to the magnet ring (Fig. 3-6).
Note:
For a detailed technical descriptionand installation instructions formagnet rings, see User's Guide atwww.balluff.com
Incremental sensors
Rear viewwith cable
Front view

BML-S1C0-Q53_-M400-_0-KA_ _Magnetic Linear Encoder System
english6
4 Wiring
Note the following when makingelectrical connections:
The system and the controlcabinet must be at thesame ground potential.
To ensure EMC, which Balluffconfirms with the CE Marking, thefollowing instructions must befollowed.
The cable shield must begrounded on the controller side,
i.e., connect to the protectionground.
When routing the cable betweenthe transducer, controller and po-wer supply avoid proximity to high-voltage lines due to noisecoupling.Especially critical are straycoupling caused by AC harmonics(e.g., from phase controls), againstwhich the cable shield offers littleprotection.
Cable length max. 20 m;conductor cross-section min.0.14 mm2, max. 0.5 mm2. Longercables may be used if theirconstruction, shielding and routingresist external noise fields.Important:In spite of a voltage drop in theline a nominal operating voltage of10 to 30 V must be ensured.
4.1 Cable assignments
Cable Signal
WH white A
GN green B
BU blue GND
RD red 10...30 V
BK black Shield
4.2 Interface
Digital incremental system
The sensor sends the measuredvariable to the controller as anoperating voltage level.
The edge separation A/Bcorresponds to the resolution of thesensing head.
Fig. 4-1: Digital output signals
Signal period 360° el.
el.
Edge separation

BML-S1C0-Q53_-M400-_0-KA_ _Magnetic Linear Encoder System
7english
5 Selecting the Appropriate BML and Controller System
5.1 Determining the appropriateBML system for an existingcontroller (linear motion)
Example (see Table 5-1)Assumptions:– Your controller can detect a min.
edge separation of 60 µs. If thereis no BML with this min. edgeseparation, select a BML withgreater edge separation.
– The max. traverse speed of thesystem should be 2 m/s.
Determining the appropriate BML:– You need a BML with min. edge
separation 100 µs (R-type).– To be able to traverse at
max. 2 m/s, select the modelwith 500 µm resolution (N-type).
Table 5 -1 shows the relationshipbetween the min. edge separation,the resolution and the max. traversespeed for BML systems using amagnetic tape.
Important!The controller/display must be ableto count the minimum time-basededge separations shown in thetables (note the counting frequencyof your controller). The min. edgeseparation may even be present inthe stopped state due to the internalinterpolation procedure.
5.2 Determining the appropriateBML system for an existingcontroller (linear motion)
What does the max. countingfrequency of the controller needto be? The period of the input signalis 4x the edge separation (seeFig. 4-1).The max. frequency of the inputsignal is then 1/(4× edgeseparation). At 4x interpolation themax. counting frequency of thecontroller is 1/edge separation.
Example: With an edge separationof 10 µs for the model G BML,the max. frequency of the inputsignal is 1/(4x10 µs) = 25 kHz. Themax. counting frequency at 4xinterpolation = 1/10 µs = 100 kHz.
For the BML the maximum traverse speed depends on the min. edgeseparation and on the mechanical resolution (see Table 5-1).In the table the X indicates the min. edge separation in time of the BMLmodel and Y the mechanical resolution (see part numbering code).
Table 5-1: Relationship between min. edge separation, mech. resolution andmax. traverse speed
min. edge separation X:M = 10 µs R = 100 µs
Resolution Y Vmax corresponding to edge separation and resolution
L = 100 µm 8 m/s 0.9 m/s
M = 200 µm 10 m/s 1,8 m/s
N = 500 µm 10 m/s 4,2 m/s
P = 1000 µm 10 m/s 8,8 m/s
R = 2000 µm 10 m/s 10 m/s
BML-S1C0-Q53L-M400-R0-KA05 (model example)
min. edge separation X (see table for code)
mech. resolution Y (see table for code)

BML-S1C0-Q53_-M400-_0-KA_ _Magnetic Linear Encoder System
english8
Table 5-2 shows the relationshipbetween mechanical resolution andpulses/revolution for BML systemswith magnet rings.
Step 1
First decide how many pulses perrevolution your application requires.From this you can derive themagnet ring outside diameter andthe resolution of the sensor headand sensor head model.
Table 5-2 shows for each magnetring the relationship between thenumber of pulses per revolution andthe resolution of the sensor head.
Example (see Table 5-2):– The application requires 500
pulses/revolution.– These pulses are provided by the
BML system, consisting of asensor head with a resolution of200 µm (M-type) and aBML.-M2x...031 magnet ring.
5.3 Determining resolution and max. rotational speed for BML systems with magnet ring (rotary motion)
Step 2
If the rotational speed is a given foryour application, select the sensorhead with the minimum edgeseparation which corresponds tothe specified pulse count/revolutionand based on the magnet ring andresolution you selected in Step 1.
Example:
Assumptions:– The specified pulse number is
500/revolution (see Step 1:BML-M2x...031 ring and BMLresolution 200 µm).
– The max. rotational speed shouldbe 900 rpm.
Table 5-2: Pulses/revolution of a BML-S1C... system with magnet rings.
Magnet ring type BML-M2...031/... BML-M2...048/... BML-M2...072/...
No. of poles 20 32 46
Resolution Y Pulses per revolutionSensor head with 4x interpolation
L = 100 µm 1,000 1,600 2,300
M = 200 µm 500 800 1,150
N = 500 µm 200 320 460
P = 1000 µm 100 160 230
R = 2000 µm 50 80 115
Determining the suitable BMLsensor head (see Table 5-3)– Search column
"M = 200 µm, 500 pulses" forevery line whose rotational speedis greater than the requiredspeed.The sensor head with 100 µmedge separation (R-type) issuitable.Together with magnet ringBML-M2x...031 it meets thesystem requirements.
Table 5-3:Max. speeds as a function of minimum edge separation and mechanical resolution for magnet ring BML-M2x...031 withoutside diameter 31 mm
mech. resolutionY L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Pulses/revolution 1000 500 200 50100
min. edge separation X max. kHz A/B-Sig max. speed for magnet ring BML-M2x...031...
M = 10 µs 25 4.800 6.000 6.000 6.000 6.000
R = 100 µs 25 540 1,080 2,520 5,280 6,000
Tables 5 -3 to 5 -5 show therelationship between the min. edgeseparation, mechanical resolutionand the max. rotational speed forBML systems using magnet rings.
BML-S1C0-Q53L-M400-R0-KA05 (model example)
min. edge separation X(see Tables 5-3 to 5-5 for codes)
mech. resolution Y(see Tables 5-3 to 5-5 for codes)
Example:
5 Selecting the Appropriate BML and Controller System

BML-S1C0-Q53_-M400-_0-KA_ _Magnetic Linear Encoder System
9english
Table 5-4:Max. speeds as a function of minimum edge separation and mechanical resolution for magnet ring BML-M2x...048 withoutside diameter 48 mm
mech. resolution Y L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Pulses/revolution 1600 800 320 160 80
min. edge separation X max. kHz A/B-Sig max. speed for magnet ring BML-M2x...048...
M = 10 µs 25 3,000 3,750 3,750 3,750 3,750
R = 100 µs 25 338 675 1.575 3.300 3.750
Table 5-5:Max. speeds as a function of minimum edge separation and mechanical resolution for magnet ring BML-M2x...072 withoutside diameter 72 mm
mech. resolution Y L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Pulses/revolution 2300 1150 460 230 115
min. edge separation X max. kHz A/B-Sig max. speed for magnet ring BML-M2x...072...
M = 10 µs 25 2.087 2.609 2.609 2.609 2.609
R = 100 µs 25 235 470 1.096 2.296 2.609
6 Startup
6.1 Turn on system
Note that the system may performuncontrolled movements when it isswitched on, in particular when it isswitched on for the first time and ifthe length measurement system inpart of a control system for which theparameters have yet to be set.Therefore be sure that no hazardscould result from an unpredictablestart.
6.2 Check system function
After installing the transducersystem or replacing the sensinghead, check all functions as follows:1. Turn on power to the sensor
head.2. Move the sensor head over the
entire measuring length/numberof revolutions.
3. Check whether all signals areoutput.
4. Check whether the countdirection agrees with the directionof travel/direction of rotation.If not, reverse connections A and/A.
7.1 Tape cover(order separately)
To prevent damage to the tapefrom things like chips or chemicals,it may be covered with a strip ofstainless steel.Note that the permissible air gapbetween the sensing head and tapeis reduced now by the thickness ofthe cover strip with adhesive film(0.15 mm) (Fig. 3-2).Before adhering the cover strip,thoroughly clean the surface of thetape (acetone, turpentine, mildplastic cleaner, no gasoline).
Ship configurations:1 Tape cover and tape can
be ordered together in theappropriate length.
2 The tape cover may beordered in 4 defined lengths.
7 Accessories
6.3 Regular checking
The functionality of the encodersystem and all its associatedcomponents should be checkedand logged at regular intervals.
6.4 Malfunction
If there is any indication that themeasuring system is not functioningproperly, remove it from service andsecure it against unauthorized use(see also Troubleshooting).
Note:
For a detailed technical descriptionand ordering code for the coverstrip, see User's Guide for tape atwww.balluff.com
5 Selecting the Appropriate BML and Controller System

BML-S1C0-Q53_-M400-_0-KA_ _Magnetic Linear Encoder System
english10
8 Troubleshooting
Problem
The controller is receiving (at times)no distance information.
The controller is receiving nodistance information at certainpoints.
Position signal is highly noisy
Linearity deviation is out oftolerance.
Possible causes
The necessary supply voltage is notpresent.
The voltage drop is too great.
Cables are not connected.
The distance between sensor headand tape is (in places) wrong.
The magnetic poles of the tape aredamaged in places by the presenceof strong magnets.
Distance between sensor head andtape is too great.
The sensor head is not movingparallel to the tape (see Fig. 3-4 fortolerance).Distance between sensor head andtape is too great.
Remedy/Explanation
Check whether power is presentand whether the BML is properlyconnected.
The system must have an operatingvoltage of 10...30 V.
Check cables against the wiringdiagrams.
Adjust the height of the sensorhead. To check, move the headmanually over the entire measuringrange.
Replace tape.
Attach sensor head closer to tape.
Correctly position the sensor head(section 3).

BML-S1C0-Q53_-M400-_0-KA_ _Magnetic Linear Encoder System
11english
Electrical dataOutputOutput signalResolutionOutput voltageSystem accuracyHysteresismax. non-linearity (Lin 1) of thesensor head, unidirectionalmax. non-linearity (Lin 2) of themagnetic tape, unidirectional,measuring length max. 24 mmax. non-linearity of the entiresystem (Lin 1 + Lin 2)Temperature coefficientof overall system such as steelMax. traverse speedReverse polarity protectedOvervoltage protectedOperating voltageCurrent draw at10...30 V operating voltageVibrationper IEC 60068-2-27 1
Continuous shockper IEC 60068-2-29 1
Vibrationper IEC 60068-2-6 1
Ambient conditionsOperating temperatureStorage temperatureProtection per IEC 60529
Mechanical dataSensor head to tape gapHousing materialConnection typeWeight
Model BML-S1C0-Q53...Supply voltage level (HTL)A-Signal, B-Signal (digital square waves)100 µm, 200 µm, 500 µm, 1000 µm, 2000 µmsame as supply voltage 10...30 V without A/B (HTL)±100 µm< 1 increment±50 µm
±50 µm
±100 µm (sensor head + tape)
10.5 x 10-6 K-1
10 m/syesno10...30 mm< 40 mA + current draw of the controller (depending on internal resistance)
100 g/6 ms
100 g/2 ms
12 g, 10...2000 Hz
–20 °C...+80 °C–30 °C...+85 °CIP67
0.01...2 mmPlastic4-conductor cable (LIf12YFCF11Y 6×2×0.08 mm2)11 g without cable
9 Technical Data
1 Individually determined according to Balluff Factory Standard
CableModel
Operating temperature Flexed FixedCable diameterCable bending radius Flexed Fixed
PU cable 4-conductor, shielded,drag chain capable
–20...80 °C–40...90 °C5.4 +0.2 mm
81 mm41 mm
10 Scope of Delivery
Sensor headShort guide

BML-S1C0-Q53_-M400-_0-KA_ _Magnetic Linear Encoder System
english12
11 Versions
Part numbering for sensing head (printed on part label)
BML - S1C0 - Q 5 3 L - M 4 0 0 -R 0 - KA05 (example)
Connection: KA05 = Cable 5 m Possible cable lengths: 2, 5, 10, 15, 20 m
min. edge separation: M = 10 µs R = 100 µs
Limit switches 0 = no limit switch
Reference signal 0 = no signal
Pole width 4 = 5 mm
Resolution (edge separation A/B) L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Output voltage 3 = Level same as operating voltage HTL
Operating voltage 5 = 24 V (10...30 V)
No.
848
735
-726
E •
01.
1083
92 •
Ed
ition
071
1; S
pec
ifica
tions
sub
ject
to
chan
ge •
Rep
lace
s E
diti
on 0
608

BML-S1C0-Q53_-M400-_0-KA_ _
español
Balluff GmbHSchurwaldstrasse 973765 Neuhausen a.d.F.AlemaniaTel. +49 7158 173-0Fax +49 7158 5010Línea de servizio +49 7158 [email protected]
Manual de instrucciones

BML-S1C0-Q53_-M400-_0-KA_ _Sistema de medición longitudinal con banda magnética
español2
Lea este manual de instruccionesantes de instalar el sensor dedesplazamiento y efectuar la puestaen servicio del equipo.
1.1 Utilización conforme al usoprevisto
El sensor de desplazamiento BMLdebe montarse en una máquinao instalación para poder utilizarse.El sensor forma, junto con undispositivo de control (PLC), unsistema de medición longitudinal ydebe ser utilizado únicamente paraeste propósito.
Las manipulaciones indebidas y lautilización no conforme al usoprevisto dan lugar a la anulación dela garantía.
1.2 Personal cualificado
Este manual de instrucciones estádirigido a personal especializadoque se encarga de las tareas demontaje, instalación y ajuste delequipo.
1 Indicaciones de seguridad
1.3 Utilización y comprobación
Para la utilización del sensor dedesplazamiento deben tenerse encuenta las normativas de seguridadcorrespondientes.Particularmente, deberán tomarselas medidas oportunas para queen caso de fallo del sensor dedesplazamiento no se ponga enpeligro la integridad física de laspersonas ni se produzcan dañosmateriales. Estas medidas incluyenel montaje del interruptor final deseguridad, el interruptor de paradade emergencia y el cumplimientode las condiciones ambientalespermitidas para la utilización delequipo.Los sensores de desplazamientoBML no deben utilizarse ensistemas de salvamento, enaviones, etc.
1.4 Validez
Este manual de instrucciones esválido para los sensores dedesplazamiento del modeloBML-S1C0-...-KAxx.
En el capítulo 11 "Versiones" haydisponible una visión general sobrelas diferentes versiones existentes(datos en la placa decaracterísticas).
Comprobaciones de emisiones:Emisiones radioeléctricas
EN 55011 grupo 1, clase A+BComprobaciones de resistencia ainterferencias:Electricidad estática (ESD)
EN 61000-4-2 nivel de intensidad 3Campos electromagnéticos (RFI)
EN 61000-4-3 nivel de intensidad 3Impulsos de interferencia transitoriosrápidos
EN 61000-4-4 nivel de intensidad 3Ondas de choque
EN 61000-4-5 nivel de intensidad 2Perturbaciones conducidas, inducidaspor campos de alta frecuencia
EN 61000-4-6 nivel de intensidad 3Campos magnéticos
EN 61000-4-8 nivel de intensidad 4
Con el distintivo CEcertificamos que nuestrosproductos cumplen con
los requisitos de la directiva europea
89/336/CEE (directiva CEM)
y la ley sobre compatibilidadelectromagnética correspondiente.Nuestro laboratorio CEM, acreditadopor el organismo DATech para efectuarcomprobaciones sobre la compatibili-dad electromagnética, ha expedido uncertificado conforme al cual los produc-tos Balluff cumplen los requisitos CEMpara las normas genéricas que seespecifican a continuación:
EN 61000-6-4 (emisión)
EN 61000-6-2 (resistencia ainterferencias)
Índice
1 Indicaciones de seguridad .. 21.1 Utilización conforme
al uso previsto ........................ 21.2 Personal cualificado ............... 21.3 Utilización y comprobación .... 21.4 Validez .................................... 2
2 Características y función ..... 32.1 Características ....................... 32.2 Funcionamiento ..................... 32.3 Señales de las interfaces ....... 3
3 Montaje del sensor............... 43.1 Montaje del sensor
y del cuerpo de medición(movimiento lineal) ................. 4Distancias, tolerancias ........... 4Montaje de lacabeza del sensor .................. 5
3.2 Montaje del sensory del anillo magnético(movimiento giratorio) ............. 5
4 Conexiones ........................... 64.1 Asignación de cables ............. 64.2 Interfaces ............................... 6
5 Selección del sistemaadecuado de BML y deldispositivo de control ........... 7
5.1 Determinación de BML .......... 75.2 Determinación del
dispositivo de control ............. 75.3 Sistema BML
con anillo magnético ................ 8
6 Puesta en servicio ................ 96.1 Puesta en marcha del sistema .. 96.2 Comprobación del
funcionamiento del sistema ... 96.3 Comprobaciones periódicas .. 96.4 Fallos de funcionamiento ....... 9
7 Accesorios ............................ 97.1 Cinta protectora ..................... 98 Corrección de errores ........ 109 Datos técnicos.................... 1110 Volumen de suministro ...... 1111 Versiones (datos en la placa
de características) .............. 12
BML-S1C0-Q53_-M400-_0-KA_ _Sistema de medición longitudinal con banda magnética
3español
2 Función y características
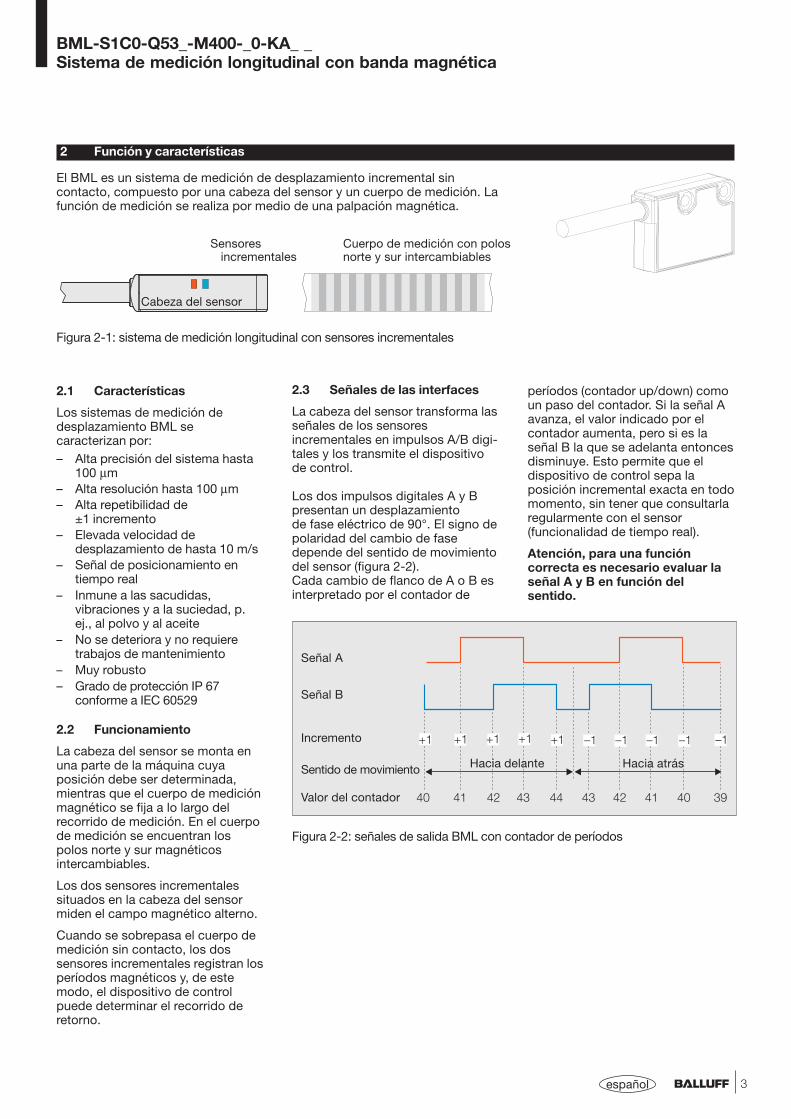
El BML es un sistema de medición de desplazamiento incremental sincontacto, compuesto por una cabeza del sensor y un cuerpo de medición. Lafunción de medición se realiza por medio de una palpación magnética.
Figura 2-1: sistema de medición longitudinal con sensores incrementales
Sensores incrementales
Cuerpo de medición con polosnorte y sur intercambiables
Cabeza del sensor
2.1 Características
Los sistemas de medición dedesplazamiento BML secaracterizan por:– Alta precisión del sistema hasta
100 µm– Alta resolución hasta 100 µm– Alta repetibilidad de
±1 incremento– Elevada velocidad de
desplazamiento de hasta 10 m/s– Señal de posicionamiento en
tiempo real– Inmune a las sacudidas,
vibraciones y a la suciedad, p.ej., al polvo y al aceite
– No se deteriora y no requieretrabajos de mantenimiento
– Muy robusto– Grado de protección IP 67
conforme a IEC 60529
2.2 Funcionamiento
La cabeza del sensor se monta enuna parte de la máquina cuyaposición debe ser determinada,mientras que el cuerpo de mediciónmagnético se fija a lo largo delrecorrido de medición. En el cuerpode medición se encuentran lospolos norte y sur magnéticosintercambiables.
Los dos sensores incrementalessituados en la cabeza del sensormiden el campo magnético alterno.
Cuando se sobrepasa el cuerpo demedición sin contacto, los dossensores incrementales registran losperíodos magnéticos y, de estemodo, el dispositivo de controlpuede determinar el recorrido deretorno.
2.3 Señales de las interfaces
La cabeza del sensor transforma lasseñales de los sensoresincrementales en impulsos A/B digi-tales y los transmite el dispositivode control.
Los dos impulsos digitales A y Bpresentan un desplazamientode fase eléctrico de 90°. El signo depolaridad del cambio de fasedepende del sentido de movimientodel sensor (figura 2-2).Cada cambio de flanco de A o B esinterpretado por el contador de
períodos (contador up/down) comoun paso del contador. Si la señal Aavanza, el valor indicado por elcontador aumenta, pero si es laseñal B la que se adelanta entoncesdisminuye. Esto permite que eldispositivo de control sepa laposición incremental exacta en todomomento, sin tener que consultarlaregularmente con el sensor(funcionalidad de tiempo real).
Atención, para una funcióncorrecta es necesario evaluar laseñal A y B en función delsentido.
Figura 2-2: señales de salida BML con contador de períodos
Señal A
Señal B
Incremento
Sentido de movimiento
Valor del contador
Hacia delante Hacia atrás

BML-S1C0-Q53_-M400-_0-KA_ _Sistema de medición longitudinal con banda magnética
español4
3 Montaje del sensor
Normas importantes de montaje:
Deben respetarse las toleranciasadmisibles de distancia y ánguloque se indican en las figuras 3-2,3-3 y 3-4.La cabeza del sensor no debeentrar en contacto con el cuerpo demedición en ningún punto delrecorrido de medición. Debeevitarse también el contacto encaso de que el cuerpo de mediciónesté cubierto con una cintaprotectora de acero fino (opcional).El cuerpo de medición magnéticono debe estar expuesto a la acciónde campos magnéticos externos dealta intensidad. También debeevitarse el contacto directo conimanes adherentes u otros imanespermanentes.El sistema de medición de desplaza-miento se debe montar conforme algrado de protección indicado.
Distancias y tolerancias
Deben respetarse las tolerancias ydistancias a las que se hace referencia acontinuación para llevar a cabodebidamente la instalación de la cabezadel sensor y del cuerpo de medición:– la distancia (ranura de aire) entre la
cabeza del sensor y el cuerpo demedición que se indica en la figura 3-2
– el desplazamiento horizontal entre lacabeza del sensor y el cuerpo demedición que se indica en la figura 3-3
– las tolerancias de ángulos que seindican en la figura 3-4 En lainclinación que forma el eje longitudi-nal de la cabeza del sensor, se debemantener la distancia nominal alcuerpo de medición en el centro de lacabeza. Es en ese punto, justo en laparte inferior, donde se encuentran losdos sensores incrementales.
Nota:ya pequeñas desviaciones de los valoresde tolerancia pueden repercutirnegativamente sobre el resultado demedición.
La precisión del sistema especificadasólo es aplicable cuando el cuerpo demedición está montado paralelamente alsentido de desplazamiento.
Figura 3-1: dibujo a escala
Cuerpo demedición
Figura 3-4: tolerancias de ángulo permitidas
Figura 3-2: Distancia permitida entrela cabeza del sensor y el cuerpo demedición
Cuerpo demedición
Cintaprotectora deacero fino
Figura 3-3: tolerancia horizontaladmisible a la derecha o izquierda
3.1 Montaje del sensor y del cuerpo de medición (movimiento lineal)

BML-S1C0-Q53_-M400-_0-KA_ _Sistema de medición longitudinal con banda magnética
5español
3 Montaje del sensor (continuación)
Montaje de la cabeza del sensor
La cabeza del sensor debe fijarsecon tornillos M3 por su ladoderecho o izquierdo a la parte de lamáquina cuya posición se debadeterminar.
¡Importante!No debe actuar ninguna fuerzasobre el cable de la carcasa. Sedebe disponer una protecciónantitirón para el cable.
Nota:
Para una descripción técnicadetallada e instrucciones demontaje para el cuerpo demedición ver las instrucciones deservicio de los cuerpos demedición en www.balluff.com
Recomendación para seleccionarel cuerpo de medición
Cuerpo de medición BML-M02-I46o anillos magnéticos
3.2 Montaje del sensor y de los anillos magnéticos (movimiento giratorio)
Normas importantes de montaje:
Deben respetarse las toleranciasadmisibles de distancia ydesplazamiento que se indican enlas figuras 3-5, 3-6 y 3-7.La cabeza del sensor no debeentrar en contacto con el anillomagnético.El anillo magnético no debe estarexpuesto a la acción de campos
Figura 3-5: Distancia permitida Figura 3-6: Desplazamiento axialpermitido
Figura 3-7: Desplazamiento tangencialpermitido
magnéticos externos de altaintensidad.También debe evitarse el contactodirecto con imanes adherentes uotros imanes permanentes.El sistema de medición dedesplazamiento se debe montarconforme al grado de protecciónindicado.
Respecto al anillo magnético, sepuede montar el sensor con lasalida del cable a la derecha o a laizquierda (figura 3-6).
Nota:
Para una descripción técnicadetallada e instrucciones demontaje para los anillosmagnéticos ver las instruccionesde servicio en www.balluff.com
Sensores incrementales
Vista de laparte trasera
con cable
Vista lateral

BML-S1C0-Q53_-M400-_0-KA_ _Sistema de medición longitudinal con banda magnética
español6
4 Conexiones
Normas importantes relativas alas conexiones eléctricas:
La instalación y el armarioeléctrico deben tener elmismo potencial de puesta
a tierra.
Con el objetivo de garantizar lacompatibilidad electromagnética(CEM) que la marca Balluff certificacon el marcado CE, es precisoseguir estrictamente lasindicaciones siguientes.
Por el lado del dispositivo decontrol se debe conectar elapantallamiento del cable a tierra,es decir, debe estar unido alconductor de protección.
Al tender el cable entre eltransductor de desplazamiento, elcontrol y la alimentación decorriente se debe evitar que hayalíneas de alta tensión en lasproximidades para evitar elacoplamiento de interferencias.Especialmente críticas son lasinterferencias originadas por ondasarmónicas de la red (por ejemplo,de controles por corte de onda),para las cuales la pantalla de cable
4.1 Asignación de cables
Cable Señal
WH blanco A
GN verde B
BU azul GND
RD rojo 10...30 V
BK negro pantalla
4.2 Interfaz
Sistema de medición incrementaldigital
El sensor transmite la magnitud demedición como nivel de tensión deservicio (HTL) al dispositivo decontrol.
La distancia de flancos A/Bcorresponde a la resolución de lacabeza del sensor. Figura 4-1: señales de salida digita-
les
Ciclo de señal 360° el.
eléctrico
Distancia de flancos
sólo ofrece una protecciónreducida.
Longitud máx. del cable 20 m;sección mín. del conductor0,14 mm2, máx. 0,5 mm2. Puedenemplearse cables con una longitudsuperior siempre que la estructura,apantallamiento y tendido delcable ofrezcan una protecciónadecuada contra las interferenciasexternas.Muy importante:a pesar de una caída de tensión enla alimentación debe garantizarseuna tensión de servicio nominal de10 hasta 30 V en el sensor.

BML-S1C0-Q53_-M400-_0-KA_ _Sistema de medición longitudinal con banda magnética
7español
5 Selección del sistema adecuado de BML y del dispositivo de control
5.1 Detección del sistema BMLadecuado para el dispositivode control disponible(movimiento lineal)
Ejemplo (ver tabla 5-1)Supuestos:- Su dispositivo de control puede
detectar una distancia de flancosmínima de 60 µs. Si no hayningún BML con esta distanciade flancos mínima, seleccione unBML con una distancia deflancos mayor
- La velocidad de desplazamientomáxima del sistema debe ser2 m/s.
Determinación del BML adecuado:- Necesita un BML con una
distancia de flancos mínimade 100 µs (identificación demodelo R)
- Para poder realizar undesplazamiento máximo de 2 m/s, seleccione el modelo conresolución 500 µm (identificaciónde modelo N)
La tabla 5-1 muestra la relaciónentre la distancia de flancosmínima, la resolución y la velocidadde desplazamiento máxima para lossistemas BML con cuerpo demedición magnético.
¡Importante!El dispositivo de control/laindicación debe ser capaz derealizar un cómputo de lasdistancias de flanco en tiempomínimas que aparecen en la tabla(observe la frecuencia de cómputode su dispositivo de control). Ladistancia de flancos mínima puedeaparecer por el desplazamientointerno interpolar y en parada.
5.2 Detección del dispositivo decontrol adecuado para elsistema BML disponible(movimiento lineal)
¿Qué frecuencia de cómputomáxima debe tener el dispositivo decontrol? El periodo de la señal deentrada es cuatro veces la distanciade flancos (ver figura 4-1).La frecuencia máxima de la señalde entrada es de 1/ (4 x distanciade flancos). Para una evaluacióncuádruple la máxima frecuencia decómputo del dispositivo de controles de 1/distancia de flancos.
Ejemplo:Para el tipo BML M con unadistancia de flancos de 10 µs lafrecuencia máxima de la señal deentrada es de 1/(4x10 µs) = 25 kHz.La frecuencia de cómputomáxima para una evaluacióncuádruple = 1/10 µs = 100 kHz.
En el BML, la velocidad de desplazamiento máxima depende de la distanciade flancos mínima y de la resolución mecánica (ver tabla 5-1).En la tabla, la distancia de flanco en tiempo mín. del tipo BML se marca conuna X y la resolución mecánica con una Y (ver código de modelo).
Tabla 5-1: Relación entre la distancia de flancos mínima, la resoluciónmecánica y la velocidad de desplazamiento máxima
Distancia de flancos mínima X:M = 10 µs R = 100 µs
Resolución Y Vmáx correspondiente a distancia de flancos y resolución
L = 100 µm 8 m/s 0,9 m/s
M = 200 µm 10 m/s 1,8 m/s
N = 500 µm 10 m/s 4,2 m/s
P = 1000 µm 10 m/s 8,8 m/s
R = 2000 µm 10 m/s 10 m/s
BML-S1C0-Q53L-M400-R0-KA05 (ejemplo de modelo)Distancia de flancos mínima X (identificaciónver tabla)
Resolución mecánica Y (identificación ver tabla)

BML-S1C0-Q53_-M400-_0-KA_ _Sistema de medición longitudinal con banda magnética
español8
La tabla 5-2 muestra la relación dela resolución mecánica y losimpulsos/vuelta para los sistemasBML con anillos magnéticos.
Paso 1
Primero decida cuántos impulsospor vuelta son necesarios para suaplicación. De ahí se extraen eldiámetro exterior del anillomagnético y la resolución de lacabeza del sensor o bien del tipo decabeza del sensor.
La tabla 5-2 muestra para cadaanillo magnético la relación entre elnúmero de impulsos por vuelta y laresolución de la cabeza del sensor.
Ejemplo (ver tabla 5-2):– La aplicación necesita 500
impulsos/vuelta.– Estos impulsos los produce el
sistema BML, compuesto poruna cabeza de sensor con unaresolución de 200 µm(identificación de modelo M) y unanillo magnético BML.-M2x...031.
5.3 Detección de la resolución y del número de revoluciones máximo para los sistemas BML con anillo magnético (movimiento giratorio)
Paso 2
Si el número de revoluciones de suaplicación es conocido, seleccione(partiendo del anillo magnéticoelegido en el paso 1 y de laresolución) la cabeza del sensor conla distancia de flancos mínima quecorresponda al número deimpulsos/vuelta determinado.
Ejemplo:
Supuestos:– El número de impulsos
establecido es de 500/vuelta (verpaso 1: anillo BML-M2x...031 yresolución BML 200 µm).
– El número de revolucionesmáximo debe ser de 900 rpm.
Tabla 5-2: Impulsos/vuelta del sistema de BML-S1C... y anillos magnéticos
Tipo de anillo magnético BML-M2...031/... BML-M2...048/... BML-M2...072/...
Número de polos 20 32 46
Resolución Y Impulsos por vueltaCabeza del sensor para evaluación de cuatro veces
L = 100 µm 1.000 1.600 2.300
M = 200 µm 500 800 1.150
N = 500 µm 200 320 460
P = 1000 µm 100 160 230
R = 2000 µm 50 80 115
Determinación de la cabezadel sensor BML adecuada (ver tabla5-3):– Busque en la columna
"M = 200 µm, 500 impulsos" lafila cuyo número de revolucionessea superior al número derevoluciones requerido.Es adecuada la cabeza delsensor con la distancia deflancos 100 µm (identificación demodelo R).Ésta cumple los requisitos delsistema junto con el anillomagnético BML-M2x...031.
Tabla 5-3:Número de revoluciones máximo dependiendo de la distancia de flancos mínima y de la resolución mecánica para anillomagnético BML-M2x...031 con diámetro exterior de 31 mm
Resolución mecánica Y L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Impulsos/vuelta 1000 500 200 100 50
Dist. de flancos mín. X máx. kHz señal A/B número de revoluciones máximo para anillo magnético BML-M2x...031...
M = 10 µs 25 4.800 6.000 6.000 6.000 6.000
R = 100 µs 25 540 1.080 2.520 5.280 6.000
Las tablas 5-3 a 5-5 muestran larelación entre la distancia deflancos mínima, la resoluciónmecánica y el número derevoluciones máximo para lossistemas BML con anillosmagnéticos.
BML-S1C0-Q53L-M400-R0-KA05 (ejemplo de modelo)
Distancia de flancos mínima X(identificaciones ver tablas 5-3 a 5-5)
Resolución mecánica Y(identificaciones ver tablas 5-3 a 5-5)
Ejemplo:
5 Selección del sistema adecuado de BML y del dispositivo de control

BML-S1C0-Q53_-M400-_0-KA_ _Sistema de medición longitudinal con banda magnética
9español
Tabla 5-4:Número de revoluciones máximo dependiendo de la distancia de flancos mínima y de la resolución mecánica para anillomagnético BML-M2x...048 con diámetro exterior de 48 mm
Resolución mecánica Y L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Impulsos/vuelta 1600 800 320 160 80
Dist. de flancos mín. X máx. kHz señal A/B Número de revoluciones máximo para anillo magnético BML-M2x...048...
M = 10 µs 25 3.000 3.750 3.750 3.750 3.750
R = 100 µs 25 338 675 1.575 3.300 3.750
Tabla 5-5:Número de revoluciones máximo dependiendo de la distancia de flancos mínima y la resolución mecánica para anillomagnético BML-M2x...072 con diámetro exterior de 72 mm
Resolución mecánica Y L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Impulsos/vuelta 2300 1150 460 230 115
Dist. de flancos mín. X máx. kHz señal A/B Número de revoluciones máximo para anillo magnético BML-M2x...072...
M = 10 µs 25 2.087 2.609 2.609 2.609 2.609
R = 100 µs 25 235 470 1.096 2.296 2.609
6 Puesta en servicio
6.1 Puesta en marcha delsistema
Tenga en cuenta que al conectar elsistema pueden producirsemovimientos incontrolados, sobretodo en la primera puesta enmarcha y si el dispositivo demedición de recorrido forma partede un sistema de medición longitu-dinal forma parte de un sistema deregulación cuyos parámetros todavíano han sido ajustados. Adopte lasmedidas oportunas para que nopueda derivarse ninguna situaciónde riesgo.
6.2 Comprobación delfuncionamiento del sistema
Tras montar el sistema de mediciónde desplazamiento o cambiar lacabeza del sensor, compruebetodas las funciones tal y como sedescribe a continuación:1. Conectar la tensión de
alimentación de la cabeza delsensor.
2. Desplazar la cabeza del sensor alo largo de todo el recorrido demedición/número de vueltas.
3. Compruebe si se emiten todas lasseñales.
7.1 Cinta protectora(pedir por separado)
El cuerpo de medición lineal se puedeproteger contra daños derivados, porejemplo, de virutas o agentes químicos,mediante una cinta protectora de acerofino.Tenga en cuenta que la ranura de airepermitida entre la cabeza del sensor y labanda de medición se reduce paraajustarse al grosor de la cinta protectoracon lámina adhesiva (0,15 mm) (figura3-2).Antes de recubrirla con la cintaprotectora, limpie bien la superficie delcuerpo de medición (utilice limpiadoressuaves para plástico, acetona,terpentina, pero no bencina).
Variantes de suministro:1 La cinta protectora y el cuerpo de
medición se pueden pedir conjunta-mente con la longitud adecuada.
2 La cinta protectora se puede pedirpor separado en 4 longitudesdefinidas.
7 Accesorios
4. Comprobar si la dirección decómputo coincide con ladirección de desplazamiento/rotación.En caso negativo, intercambie lasconexiones A y B.
6.3 Comprobacionesperiódicas
La capacidad de funcionamientodel sistema de medición y de todoslos componentes relacionados sedeberá comprobar y protocolizarperiódicamente.
6.4 Fallos de funcionamiento
Ante cualquier indicio de que elsistema de medición no funcionacorrectamente, póngalo fuera deservicio y asegúrelo contra elacceso no autorizado (ver tambiénCorrección de errores).
Nota:Encontrará una descripción técnicadetallada y la código de pedidopara la cinta protectora en lasinstrucciones de servicio de loscuerpos de medición enwww.balluff.com
5 Selección del sistema adecuado de BML y del dispositivo de control

BML-S1C0-Q53_-M400-_0-KA_ _Sistema de medición longitudinal con banda magnética
español10
8 Corrección de errores
Error
El dispositivo de control no recibeinformación de recorrido (enalgunas posiciones).
El dispositivo de control no recibeinformación de recorrido en algunasposiciones.
La señal de posicionamientoproduce demasiado ruido
Las desviaciones en la linealidadestán fuera de lo tolerado.
Posibles causas
Ausencia de la alimentación detensión necesaria.
La caída de tensión es excesiva.
Los cables no se han conectadocorrectamente.
La distancia entre la cabeza delsensor y el cuerpo de medición esincorrecta (en algunas posiciones).
Los polos magnéticos del cuerpode medición han sido dañados enalgunas posiciones por imanes muypotentes.
La distancia entre la cabeza delsensor y el cuerpo de medición esdemasiado grande.
La cabeza del sensor no se mueveparalelamente al cuerpo demedición (Tolerancia ver figura 3-4).La distancia entre la cabeza delsensor y el cuerpo de medición esdemasiado grande.
Corrección de errores/explicación
Compruebe si hay tensión y si elBML está conectadocorrectamente.
El sistema de medición dedesplazamiento debe disponer deuna tensión de servicio de 10...30 V.
Compruebe los cables consultandolos esquemas pertinentes.
Ajuste la altura de la cabeza delsensor. Para realizar un control,desplace manualmente la cabezapor todo el recorrido de medición.
Cambie el cuerpo de medición.
Fijar la cabeza del sensor a unareducida distancia del cuerpo demedición.
Posicionar la cabeza del sensorcorrectamente (Capítulo 3).

BML-S1C0-Q53_-M400-_0-KA_ _Sistema de medición longitudinal con banda magnética
11español
Datos eléctricosSalidaSeñal de salidaResoluciónTensión de salidaPrecisión del sistemaHistéresisDesviación máxima en la linealidad(Lin 1) de la cabeza del sensorunidireccionalDesviación máxima en la linealidad(Lin 2) del cuerpo de mediciónmagnético unidireccional, longitudde medición máx. 24 mDesviación máxima en la linealidadde todo el sistema (Lin 1 + Lin 2)Coeficiente de la temperatura detodo el sistema como el aceroVelocidad máx. de desplazamientoProtección contra las inversiones depolaridadProtección contra sobretensiónTensión de servicioCorriente absorbida a una tensiónde servicio de 10...30 VCarga por choque admisiblesegún IEC 60068-2-27 1
Choques permanentessegún IEC 60068-2-29 1
Carga por vibración admisiblesegún IEC 60068-2-6 1
Condiciones de trabajoTemperatura de servicioTemperatura de almacenamientoGrado de protección según IEC 60529
Datos mecánicosDistancia cabeza del sensor -cuerpo de mediciónMaterial de carcasaTipo de conexiónPeso
Modelo BML-S1C0-Q53...Nivel de la tensión de alimentación (HTL)Señal A, señal B (señales de onda rectangular digitales)100 µm, 200 µm, 500 µm, 1000 µm, 2000 µmcomo tensión de servicio 10...30 V sin A/B (HTL)±100 µm< 1 incremento±50 µm
±50 µm
±100 µm (cabeza del sensor + cuerpo de medición)
10,5 x 10-6 K-1
10 m/ssí
no10...30 V< 40 mA + corriente absorbida del dispositivo de control (dependiendo de laresistencia interna)100 g/6 ms
100 g/2 ms
12 g, 10...2000 Hz
–20 °C...+80 °C–30 °C...+85 °CIP67
0,01...2 mm
PlásticoCable de 4 hilos, apantallado (LIf12YFCF11Y 6×2×0,08 mm2)11 g sin cable
9 Datos técnicos
1 Especificación individual conforme a la norma de fábrica Balluff
CableTipo
Temperatura de servicio montaje flexible montaje fijoDiámetro de cableCable de radio de flexión montaje flexible montaje fijo
Cable PU de 4 hilos, apantallado,optimizado para cadena de arrastre
–20...80 °C–40...90 °C5,4 +0,2 mm
81 mm41 mm
10 Volumen de suministro
Cabeza del sensorInstrucciones breves

BML-S1C0-Q53_-M400-_0-KA_ _Sistema de medición longitudinal con banda magnética
español12
11 Versiones
Código de modelo para la cabeza del sensor (datos en la placa de características)
BML - S1C0 - Q 5 3 L - M 4 0 0 -R 0 - KA05 (ejemplo)
Tipo de conexión: KA05 = cable de 5 m Longitudes de cable posibles: 2, 5, 10, 15, 20 m
Distancia de flancos mínima: M = 10 µs R = 100 µs
Interruptor final 0 = sin interruptor final
Señal de referencia 0 = sin señal
Ancho de polos 4 = 5 mm
Resolución (distancia de flancos A/B) L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Tensión de salida 3 = nivel como tensión de servicio HTL
Tensión de servicio 5 = 24 V (10...30 V)
Nº
848
735-
726
SP
• 0
1.10
8392
• E
dic
ión
0711
; res
erva
do
el d
erec
ho a
mod
ifica
cion
es •
Sus
tituy
e a
la e
dic
ión
0608

BML-S1C0-Q53_-M400-_0-KA_ _
Notice d'utilisationfrançais
Balluff GmbHSchurwaldstrasse 973765 Neuhausen a.d.F.R.F.A.Téléphone +49 7158 173-0Télécopieur +49 7158 5010Servicehotline +49 7158 [email protected]
BML-S1C0-Q53_-M400-_0-KA_ _Système de mesure linéaire par bande magnétique
français2
Veuillez lire les présentesinstructions avant d'installer etd'utiliser le capteur dedéplacement.
1.1 Utilisation conforme auxprescriptions
Le capteur de déplacement BMLest monté dans une machine ou uneinstallation. Conjointement avec unautomate (API), il constitue unsystème de mesure linéaire et doituniquement être utilisé pour cettetâche.
Toute intervention non autorisée ettoute utilisation non admissibleentraînent la perte des droits degarantie.
1.2 Personnel qualifié
Les présentes instructionss'adressent aux personnelsspécialisés chargés d'exécuter lemontage, l'installation et le réglage.
1 Consignes de sécurité
1.3 Utilisation et contrôle
Concernant l'utilisation du capteurde déplacement, il convientd'observer les prescriptions desécurité en vigueur.Il convient notamment de prendredes mesures visant à exclure toutdanger pour les personnes et lesbiens en cas de défaillance ducapteur de déplacement. Cesmesures englobent le montage defins de course de sécurité etd'interrupteurs d'arrêt d'urgencesupplémentaires, ainsi que lerespect des conditions ambiantesadmissibles.Les capteurs de déplacement BMLne doivent pas être mis en œ uvre ausein de systèmes de secours,d'avions, etc.
1.4 Validité
Les présentes instructions sontvalables pour les capteurs dedéplacement du typeBML-S1C0-...-KAxx.
Vous trouverez un aperçu desdifférentes versions au chapitre 11Versions (indications sur la plaquesignalétique).
Contrôles en matière d'émissions :Rayonnement de signaux parasites
EN 55011 groupe 1, classe A+BContrôles d'immunité aux parasites :Electricité statique (ESD)
EN 61000-4-2 Degré de protection 3Champs électromagnétiques (RFI)
EN 61000-4-3 Degré de protection 3Impulsions parasites rapides, transitoires("burst")
EN 61000-4-4 Degré de protection 3Surtensions transitoires ("surge")
EN 61000-4-5 Degré de protection 2Grandeurs perturbatrices véhiculées parcâble, induites par des champs à hautefréquence
EN 61000-4-6 Degré de protection 3Champs magnétiques
EN 61000-4-8 Degré de protection 4
Avec cette marque CE, nousconfirmons que nos produitssont conformes aux
exigences de la directive CE
89/336/CEE (directive CEM)
et à la loi sur la compatibilitéélectromagnétique (CEM). Dans notrelaboratoire CEM, qui est accrédité par leDATech (Organisme d’homologationtechnique allemand) pour les contrôlesde compatibilité électromagnétique,nous produisons la preuve que lesproduits Balluff satisfont aux exigencesen matière de compatibilitéélectromagnétique (CEM), relatives auxnormes génériques suivantes :
EN 61000-6-4 (émission)
EN 61000-6-2 (immunité aux parasites)
Table des matières
1 Consignes de sécurité ......... 21.1 Utilisation conforme aux
prescriptions .......................... 21.2 Personnel qualifié ................... 21.3 Utilisation et contrôle ............. 21.4 Validité .................................... 2
2 Propriétés, fonctionnement . 32.1 Propriétés ............................... 32.2 Mode de fonctionnement ....... 32.3 Signaux d'interface ................ 3
3 Montage capteur .................. 43.1 Montage capteur et corps de
mesure (mouvement linéaire) .... 4Distances, tolérances ............. 4Montage de la tête de capteur .... 5
3.2 Montage capteur etbague magnétique(mouvement de rotation) ........ 5
4 Connexions ........................... 64.1 Connexions du câble ............. 64.2 Interfaces ............................... 6
5 Choix du systèmeadapté constitué du BMLet de l'automate ................... 7
5.1 Détermination du BML ........... 75.2 Détermination de l'automate .. 75.3 Système BML avec bague
magnétique ............................. 8
6 Mise en service ..................... 96.1 Mise sous tension du système ...96.2 Contrôle de fonctionnement
du système ............................. 96.3 Contrôle régulier ..................... 96.4 Dysfonctionnement ................ 9
7 Accessoires .......................... 97.1 Bande de recouvrement ......... 98 Elimination des défauts ..... 109 Caractéristiques techniques ... 1110 Volume de livraison ............ 1111 Versions (indications sur la
plaque signalétique) ........... 12

BML-S1C0-Q53_-M400-_0-KA_ _Système de mesure linéaire par bande magnétique
3français
2 Propriétés et fonctionnement
Le BML est un système de mesure de déplacement incrémental, sanscontact physique, constitué d'une tête de capteur et d'un corps de mesure.La fonction de mesure est réalisée au moyen de détection magnétique.
Figure 2-1 : Système de mesure linéaire avec capteurs incrémentaux
Capteurs incrémentaux
Corps de mesure avec pôlesnord et sud alternés
Tête de capteur
2.1 Propriétés
Les systèmes de mesure dedéplacement BML se distinguentpar les propriétés suivantes :– Grande précision du système
jusqu'à 100 µm– Grande résolution jusqu'à
100 µm– Grande reproductibilité de
±1 incréments– Grande vitesse de déplacement
de jusqu'à 10 m/s– Signal de position en temps réel– Insensible aux chocs, vibrations,
saletés telles que poussière,huile
– Exempt d'usure et d'entretien– Très robuste– Degré de protection IP 67 selon
CEI 60529
2.2 Mode de fonctionnement
La tête de capteur est montée surl'élément de machine, dont la positiondoit être déterminée, tandis que lecorps de mesure magnétique estfixé le long du tronçon de mesure.Le corps de mesure est doté depôles nord et sud alternés.
Les deux capteurs incrémentauxse trouvant dans la tête de capteurmesurent le champ magnétiquealternatif.
Lors du passage sans contactphysique du corps de mesure, lesdeux capteurs incrémentauxintégrés dans la tête de capteurbalayent les périodes magnétiques,ce qui permet à l'automate dedéterminer le chemin parcouru.
2.3 Signaux d'interface
La tête de capteur transforme lessignaux des capteurs incrémentauxen impulsions numériques A/B etles transmet à la commande.
Les deux impulsions A et Bnumériques sont déphaséesélectriquement de 90°, le signe dudéphasage dépend du sens dumouvement du capteur (figure 2-2).Tout changement de front de A ou Bconstitue un incrément decomptage pour le compteur depériodes (compteur / décompteur).
En cas de signal A déphasé enavant, la valeur du compteur estincrémentée ; en cas de signal Bdéphasé en avant, la valeur estdécrémentée. Ainsi, l'automateconnaît à chaque instant la positionincrémentale précise, sans devoirinterroger périodiquement lecapteur (capacité temps réel).
Attention, pour obtenir unfonctionnement correct, lessignaux A et B doivent êtreinterprétés indépendamment dela direction.
Figure 2-2 : Signaux de sortie BML avec compteur de périodes
Signal A
Signal B
Incrément
Sens du mouvement
Valeur du compteur
en avant en arrière

BML-S1C0-Q53_-M400-_0-KA_ _Système de mesure linéaire par bande magnétique
français4
3 Montage capteur
A respecter impérativement lors dumontage :
Les tolérances de distances etd'angles admissibles selon les figures3-2, 3-3 et 3-4 doivent êtrestrictement respectées.La tête de capteur ne doit pas entreren contact avec le corps de mesuresur la totalité de la course de mesure.De même, il convient d'éviter toutcontact lorsque le corps de mesureest recouvert d'une bande derecouvrement en acier inoxydable(option).Le corps de mesure magnétique nedoit pas être influencé par deschamps magnétiques externespuissants. Un contact direct avec desaimants adhérents ou d'autres aimantspermanents doit être strictement évité.Le système de mesure de déplace-ment doit être monté conformémentau degré de protection indiqué.
Distances, tolérances
Lors du montage de la tête decapteur et du corps de mesure, ilconvient de respecter impérativementles distances et tolérances suivantes :– La distance (entrefer) entre la tête
de capteur et le corps de mesureconformément à la figure 3-2
– Le décalage horizontal entre la têtede capteur et le corps de mesureconformément à la figure 3-3
– Les tolérances angulairesconformément à la figure 3-4. Lorsde l'inclinaison le long de l'axelongitudinal de la tête de capteur,l'écart de consigne par rapport aucorps de mesure, au centre de latête, doit être respecté. A cetendroit, sur la partie inférieure, setrouvent les deux capteursincrémentaux.
Remarque :De légers écarts par rapport auxvaleurs de tolérance peuvent entraverle résultat de mesure.
La précision spécifiée du systèmen'est valable que si le corps demesure est monté parallèlement ausens de déplacement.
Figure 3-1 : Plan côté
Corps demesure
Figure 3-4 : Tolérances angulaires admissibles
Figure 3-2 : Distance admissible entrela tête de capteur et le corps demesure
Corps demesure
Bande derecouvrement enacier inoxydable
Figure 3-3 : Tolérance horizontaleadmissible vers la droite ou vers lagauche
3.1 Montage capteur et corps de mesure (mouvement linéaire)

BML-S1C0-Q53_-M400-_0-KA_ _Système de mesure linéaire par bande magnétique
5français
3 Montage capteur (suite)
Montage de la tête de capteur
La tête de capteur doit être fixée, àl'aide de vis M3, avec son côtégauche ou droit sur l'élément demachine, dont la position doit êtredéterminée.
Important !Aucune force ne doit agir sur lecâble du boîtier. Munir le câbled'une décharge de traction.
Remarque :
Description technique détaillée etinstructions de montage pour lescorps de mesure, voir la noticed'utilisation relative aux corps demesure sous www.balluff.com
Recommandation pour le choixdu corps de mesure
Corps de mesure BML-M02-I46 oubagues magnétiques
3.2 Montage capteur et bagues magnétiques (mouvement de rotation)
A respecter impérativement lorsdu montage :
Les tolérances de distances et dedécalages admissibles selon lesfigures 3-5, 3-6 et 3-7 doivent êtrestrictement respectées. La tête decapteur ne doit pas entrer encontact avec la bague magnétique.La bague magnétique ne doit pasêtre influencée par des champsmagnétiques externes puissants.
Figure 3-5 : Distance admissible Figure 3-6 : Décalage axialadmissible
Figure 3-7 : Décalage tangentieladmissible
Un contact direct avec des aimantsadhérents ou d'autres aimantspermanents doit être strictementévité.Le système de mesure dedéplacement doit être montéconformément au degré deprotection indiqué.
Le capteur peut être monté parrapport à la bague magnétique avecdépart de câble vers la droite ouvers la gauche (figure 3-6).
Remarque :
Description technique détaillée etinstructions de montage pour lesbagues magnétiques, voir la noticed'utilisation sous www.balluff.com
Capteurs incrémentaux
Vue del'arrière
avec câble
Vue de laface frontale

BML-S1C0-Q53_-M400-_0-KA_ _Système de mesure linéaire par bande magnétique
français6
4 Connexions
A respecter impérativement lorsdu branchement électrique :
L'installation et l'armoireélectrique doivent êtrereliées au même potentiel
de terre.
Afin de garantir la compatibilitéélectromagnétique (CEM), queconfirme la sté Balluff avec lamarque CE, les consignessuivantes doivent être strictementrespectées.
Le blindage de câble doit être relié
à la terre côté automate, c.-à-d.relié avec le conducteur deprotection.
Lors de la pose du câble entre lecapteur de déplacement,l'automate et l'alimentationélectrique, il convient d'éviter laproximité de câbles de puissanceen raison de couplages parasites.
Sont particulièrement critiques lesinterférences dues aux ondesharmoniques du réseau (p. ex.provenant de commandes dedéphasage), pour lesquelles le
blindage de câble n'offre qu'unefaible protection.
Longueur du câble 20 m max. ;section des conducteurs 0,14 mm2
min., 0,5 mm2 max. Des câbles delongueur supérieure peuvent êtreutilisés dans la mesure où laconfiguration, le blindage et lapose rendent les champs parasitesextérieurs inefficaces.A respecter impérativement :Malgré la chute de tension dans lecâble d'alimentation, une tensiond'emploi nominale de 10 à 30 V doitêtre garantie au niveau du capteur.
4.1 Connexions du câble
Câble Signal
WH blanc A
GN vert B
BU bleu GND
RD rouge 10...30 V
BK noir blindage
4.2 Interface
Système de mesure incrémentalnumérique
Le capteur transmet la grandeur demesure comme niveau de tensiond'emploi (HTL) à la commande.
La distance entre les fronts A/Bdépend de la résolution de la têtede capteur.
Figure 4-1 : Signaux de sortienumériques
Période du signal 360° él.
él.
Distance entre fronts
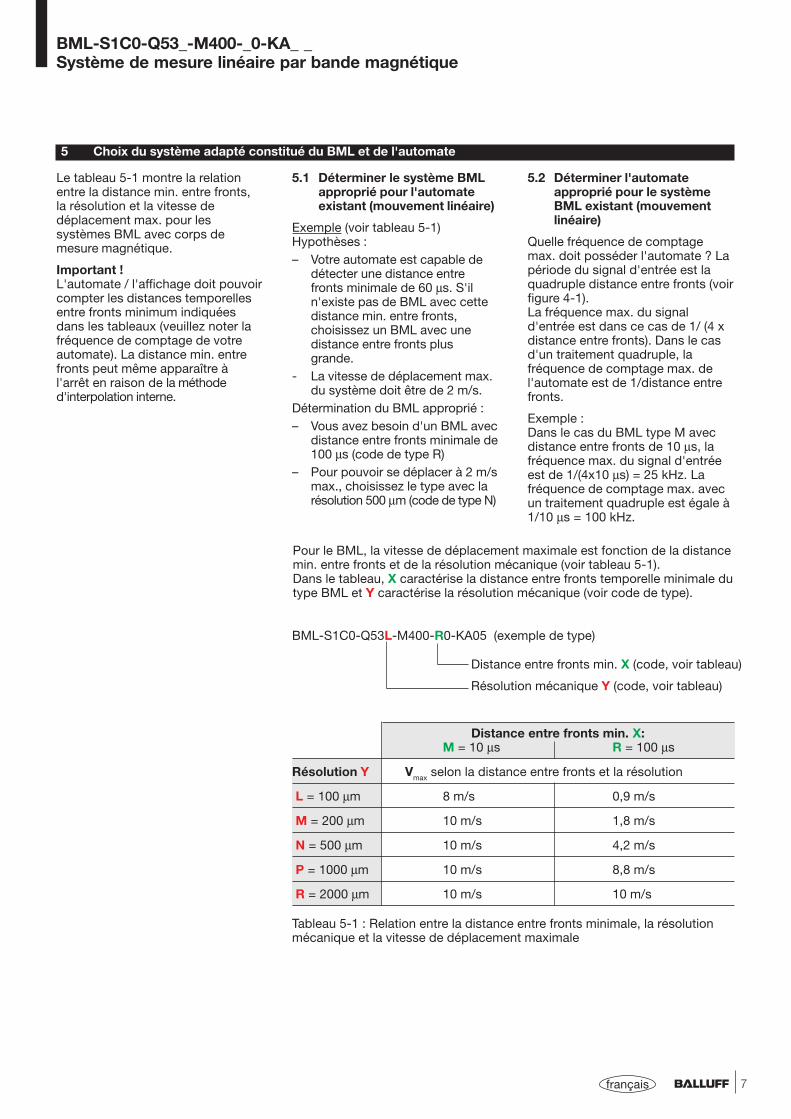
BML-S1C0-Q53_-M400-_0-KA_ _Système de mesure linéaire par bande magnétique
7français
5 Choix du système adapté constitué du BML et de l'automate
5.1 Déterminer le système BMLapproprié pour l'automateexistant (mouvement linéaire)
Exemple (voir tableau 5-1)Hypothèses :– Votre automate est capable de
détecter une distance entrefronts minimale de 60 µs. S'iln'existe pas de BML avec cettedistance min. entre fronts,choisissez un BML avec unedistance entre fronts plusgrande.
- La vitesse de déplacement max.du système doit être de 2 m/s.
Détermination du BML approprié :– Vous avez besoin d'un BML avec
distance entre fronts minimale de100 µs (code de type R)
– Pour pouvoir se déplacer à 2 m/smax., choisissez le type avec larésolution 500 µm (code de type N)
Le tableau 5-1 montre la relationentre la distance min. entre fronts,la résolution et la vitesse dedéplacement max. pour lessystèmes BML avec corps demesure magnétique.
Important !L'automate / l'affichage doit pouvoircompter les distances temporellesentre fronts minimum indiquéesdans les tableaux (veuillez noter lafréquence de comptage de votreautomate). La distance min. entrefronts peut même apparaître àl'arrêt en raison de la méthoded'interpolation interne.
5.2 Déterminer l'automateapproprié pour le systèmeBML existant (mouvementlinéaire)
Quelle fréquence de comptagemax. doit posséder l'automate ? Lapériode du signal d'entrée est laquadruple distance entre fronts (voirfigure 4-1).La fréquence max. du signald'entrée est dans ce cas de 1/ (4 xdistance entre fronts). Dans le casd'un traitement quadruple, lafréquence de comptage max. del'automate est de 1/distance entrefronts.
Exemple :Dans le cas du BML type M avecdistance entre fronts de 10 µs, lafréquence max. du signal d'entréeest de 1/(4x10 µs) = 25 kHz. Lafréquence de comptage max. avecun traitement quadruple est égale à1/10 µs = 100 kHz.
Pour le BML, la vitesse de déplacement maximale est fonction de la distancemin. entre fronts et de la résolution mécanique (voir tableau 5-1).Dans le tableau, X caractérise la distance entre fronts temporelle minimale dutype BML et Y caractérise la résolution mécanique (voir code de type).
Tableau 5-1 : Relation entre la distance entre fronts minimale, la résolutionmécanique et la vitesse de déplacement maximale
Distance entre fronts min. X:M = 10 µs R = 100 µs
Résolution Y Vmax selon la distance entre fronts et la résolution
L = 100 µm 8 m/s 0,9 m/s
M = 200 µm 10 m/s 1,8 m/s
N = 500 µm 10 m/s 4,2 m/s
P = 1000 µm 10 m/s 8,8 m/s
R = 2000 µm 10 m/s 10 m/s
BML-S1C0-Q53L-M400-R0-KA05 (exemple de type)
Distance entre fronts min. X (code, voir tableau)
Résolution mécanique Y (code, voir tableau)

BML-S1C0-Q53_-M400-_0-KA_ _Système de mesure linéaire par bande magnétique
français8
Le tableau 5-2 montre la relation dela résolution mécanique et desimpulsions/tour pour les systèmesBML avec bagues magnétiques.
Etape 1
Choisissez tout d'abord le nombred'impulsions par tour nécessairepour votre application. Il en découlele diamètre extérieur de la baguemagnétique et la résolution de latête de capteur ou le type de la têtede capteur.
Le tableau 5-2 montre pour chaquebague magnétique la relation entrele nombre d'impulsions par tour etla résolution de la tête de capteur.
Exemple (voir tableau 5-2) :– L'application nécessite 500
impulsions/tour.– Ces impulsions sont fournies par
le système BML composé d'unetête de capteur avec unerésolution de 200 µm (code detype M) et d'une baguemagnétique BML.-M2x...031.
5.3 Déterminer la résolution et la vitesse max. pour les systèmes BML avec bague magnétique (mouvement de rotation)
Etape 2
Si la vitesse est une donnée fixepour votre application, choisissez(sur la base de la bague magnétiqueet de la résolution choisies dansl'étape 1) la tête de capteur avec ladistance min. entre fronts, quicorrespond au nombred'impulsions/tour défini.
Exemple :
Hypothèses :– Le nombre d'impulsions défini
est de 500/tour (voir l'étape 1 :bague BML-M2x...031 etrésolution BML 200 µm).
– La vitesse max. doit être de900 tr/mn .
Tableau 5-2 : Impulsions/tour du système composé du BML-S1C... et debagues magnétiques
Type de bague magnétique BML-M2...031/... BML-M2...048/... BML-M2...072/...
Nombre de pôles 20 32 46
Résolution Y Impulsions par tourTête de capteur avec traitement quadruple
L = 100 µm 1.000 1.600 2.300
M = 200 µm 500 800 1.150
N = 500 µm 200 320 460
P = 1000 µm 100 160 230
R = 2000 µm 50 80 115
Détermination de la tête de capteurBML appropriée (voir tableau 5-3) :– Recherchez dans la colonne
"M = 200 µm, 500 impulsions"une ligne, dont la vitesse estsupérieure à la vitesse requise.La tête de capteur avec distanceentre fronts de 100 µm (code detype R) est appropriée dans cecas.Conjointement avec la baguemagnétique BML-M2x...031, ellesatisfait aux exigences dusystème.
Tableau 5-3 :Vitesses max. en fonction de la distance minimale entre fronts et de la résolution mécanique pour la bague magnétiqueBML-M2x...031 avec diamètre extérieur 31 mm
Résolution mécanique Y L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Impulsions/tour 1000 500 200 100 50
Distance min. entre fronts X kHz max. sig. A/B Vitesse max. avec bague magnétique BML-M2x...031...
M = 10 µs 25 4.800 6.000 6.000 6.000 6.000
R = 100 µs 25 540 1.080 2.520 5.280 6.000
Les tableaux 5-3 à 5-5 montrent larelation entre la distance min. entrefronts, la résolution mécanique et lavitesse max. pour les systèmesBML avec bagues magnétiques.
BML-S1C0-Q53L-M400-R0-KA05 (exemple de type)
Distance min. entre fronts X(codes, voir tableaux 5-3 à 5-5)
Résolution mécanique Y(codes, voir tableaux 5-3 à 5-5)
Exemple :
5 Choix du système adapté constitué du BML et de l'automate

BML-S1C0-Q53_-M400-_0-KA_ _Système de mesure linéaire par bande magnétique
9français
Tableau 5-4 : Vitesses max. en fonction de la distance minimale entre fronts et de la résolution mécanique pour la baguemagnétique BML-M2x...048 avec diamètre extérieur 48 mm
Résolution mécanique Y L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Impulsions/tour 1600 800 320 160 80
Distance min. entre fronts X kHz max. sig. A/B Vitesse max. avec bague magnétique BML-M2x...048...
M = 10 µs 25 3.000 3.750 3.750 3.750 3.750
R = 100 µs 25 338 675 1.575 3.300 3.750
Tableau 5-5 : Vitesses max. en fonction de la distance minimale entre fronts et de la résolution mécanique pour la baguemagnétique BML-M2x...072 avec diamètre extérieur 72 mm
Résolution mécanique Y L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Impulsions/tour 2300 1150 460 230 115
Distance min. entre fronts X kHz max. sig. A/B Vitesse max. avec bague magnétique BML-M2x...072...
M = 10 µs 25 2.087 2.609 2.609 2.609 2.609
R = 100 µs 25 235 470 1.096 2.296 2.609
6 Mise en service
6.1 Mise sous tension dusystème
Remarque importante : lors de lamise sous tension du système, cedernier peut exécuter desmouvements incontrôlés,notamment lors de la première misesous tension et lorsque le dispositifde mesure linéaire fait partieintégrante d'un système derégulation dont les paramètres n'ontpas encore été configurés. C'estpourquoi il convient de s'assurer del'absence de dangers à ce niveau.
6.2 Contrôle defonctionnement dusystème
Après le montage du système demesure de déplacement ou leremplacement de la tête de capteur,l'ensemble des fonctions doit êtrecontrôlé comme suit :1. Enclencher la tension
d'alimentation de la tête decapteur.
2. Déplacer la tête de capteur lelong du tronçon de mesure /nombre de tours complet.
3. Vérifier que tous les signaux sontémis.
7.1 Bande de recouvrement(à commander séparément)
Afin de protéger le corps de mesurelinéaire contre les endommagements,p. ex. dus aux copeaux ou auxproduits chimiques, celui-ci peut êtreprotégé au moyen d'une bande derecouvrement en acier inoxydable,collée sur le corps. A noter quel'entrefer admissible entre la tête decapteur et la bande de mesure seréduit de l'épaisseur de la bande derecouvrement avec film autocollant(0,15 mm) (figure 3-2). Avant de collerla bande de recouvrement, nettoyersoigneusement la surface du corpsde mesure (acétone, nettoyant pourplastiques doux, térébenthine, pasd'essence).
Variantes de livraison :1 La bande de recouvrement et le
corps de mesure peuvent êtrecommandés conjointement, selonla longueur appropriée.
2 La bande de recouvrement peutêtre commandée séparémentselon 4 longueurs définies.
7 Accessoires
4. Vérifier que le sens de comptagecoïncide avec le sens dedéplacement / rotation.Si ce n'est pas le cas, intervertirles deux connexions A et B.
6.3 Contrôle régulier
La capacité de fonctionnement dusystème de mesure et de tous lescomposants associés doit êtrecontrôlée et consignéerégulièrement.
6.4 Dysfonctionnement
En cas de signe apparent indiquantque le système de mesure nefonctionne pas correctement, il fautle mettre hors service et l'empêcherd'être utilisé par des personnes nonautorisées (voir égalementl'élimination des défauts).
Remarque :Description technique détaillée etcode de référence pour la bande derecouvrement, voir la noticed'utilisation relative aux corps demesure sous www.balluff.com
5 Choix du système adapté constitué du BML et de l'automate

BML-S1C0-Q53_-M400-_0-KA_ _Système de mesure linéaire par bande magnétique
français10
8 Elimination des défauts
Erreur
L'automate ne reçoit (partiellement)pas d'information de déplacement.
L'automate ne reçoit pasd'information de déplacement àcertaines positions.
Le signal de position a de trèsgrandes perturbations
L'écart de linéarité se situe horstolérance.
Causes possibles
La tension d'alimentationnécessaire n'est pas présente.
La chute de tension est trop grande.
Les câbles ne sont pas raccordéscorrectement.
La distance entre la tête de capteuret le corps de mesure est(partiellement) incorrecte.
Les pôles magnétiques du corps demesure sont partiellementendommagés par des aimantspuissants.
La distance entre la tête de capteuret le corps de mesure est tropgrande.
La tête de capteur ne se déplacepas parallèlement au corps demesure (tolérance voir figure 3-4).La distance entre la tête de capteuret le corps de mesure est tropgrande.
Elimination des défauts/explication
Vérifier que la tension est présenteet que le capteur BML estcorrectement raccordé.
Le système de mesure dedéplacement doit présenter unetension d'emploi de 10...30 V.
Contrôler les lignes au moyen desschémas de couplage.
Régler la hauteur de la tête decapteur. A des fins de contrôle,déplacer la tête à la main, sur latotalité de la course de mesure.
Remplacer le corps de mesure.
Fixer la tête de capteur à une faibledistance du corps de mesure.
Positionner correctement la tête decapteur (chap. 3).

BML-S1C0-Q53_-M400-_0-KA_ _Système de mesure linéaire par bande magnétique
11français
Données électriquesSortieSignal de sortieRésolutionTension de sortiePrécision du systèmeHystérésisEcart de linéarité max. (Lin 1) de latête de capteur unidirectionnelleEcart de linéarité max. (Lin 2) du corpsde mesure magnétique unidirectionnel,longueur de mesure max. 24 mEcart de linéarité max. du systèmecomplet (Lin 1 + Lin 2)Coefficient de température dusystème complet identique à l'acierVitesse de déplacement max.Protection contre l'inversion de polaritéProtection contre les surtensionsTension d'emploiCourant consommé pour unetension d'emploi de 10...30 VRésistance autorisée aux chocsselon CEI 60068-2-27 1
Chocs permanentsselon CEI 60068-2-29 1
Résistance autorisée aux vibrationsselon CEI 60068-2-6 1
Conditions ambiantesTempérature de serviceTempérature de stockageClasse de protection CEI 60529
Caractéristiques mécaniquesDistance entre la tête de capteuret le corps de mesureMatériau du boîtierRaccordementPoids
Type BML-S1C0-Q53...Niveau de la tension d'alimentation (HTL)Signal A, signal B (signaux rectangulaires numériques)100 µm, 200 µm, 500 µm, 1000 µm, 2000 µmselon tension d'emploi 10...30 V sans A/B (HTL)±100 µm< 1 incrément±50 µm
±50 µm
±100 µm (tête de capteur + corps de mesure)
10,5 x 10-6 K-1
10 m/souinon10...30 V< 40 mA + consommation électrique de l'automate (selon la résistance interne)
100 g/6 ms
100 g/2 ms
12 g, 10...2000 Hz
–20 °C...+80 °C–30 °C...+85 °CIP67
0,01...2 mm
plastiqueCâble à 4 conducteurs, blindé (LIf12YFCF11Y 6×2×0,08 mm2)11 g sans câble
9 Caractéristiques techniques
1 Détermination individuelle selon la norme d'usine Balluff
CâbleType
Température de service montage flexible montage fixeDiamètre du câbleRayon de courbure câble montage flexible montage fixe
Câble PU 4 fils, blindé,optimisé pour chaîne à drague
–20...80 °C–40...90 °C5,4 +0,2 mm
81 mm41 mm
10 Volume de livraison
Tête de capteurFiche d'utilisation

BML-S1C0-Q53_-M400-_0-KA_ _Système de mesure linéaire par bande magnétique
français12
11 Versions
Code de type pour tête de capteur (indications sur la plaque signalétique)
BML - S1C0 - Q 5 3 L - M 4 0 0 -R 0 - KA05 (exemple)
Mode de raccordement : KA05 = câble 5 m Longueurs de câble possibles : 2, 5, 10, 15, 20 m
Distance min. entre fronts : M = 10 µs R = 100 µs
Fin de course 0 = pas de fin de course
Signal de référence 0 = pas de signal
Largeur de pôle 4 = 5 mm
Résolution (distance entre fronts A/B) L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Tension de sortie 3 = niveau comme tension d'emploi HTL
Tension d'emploi 5 = 24 V (10...30 V)
N°
848
735-
726
F •
01.1
0839
2 •
Ed
ition
071
1 ;
Sou
s ré
serv
e d
e m
odifi
catio
ns •
Rem
pla
ce l'
éditi
on 0
608

BML-S1C0-Q53_-M400-_0-KA_ _
Manuale d'usoitaliano
Balluff GmbHSchurwaldstrasse 973765 Neuhausen a.d.F.GermaniaTelefono +49 7158 173-0Fax +49 7158 5010Servicehotline +49 7158 [email protected]

BML-S1C0-Q53_-M400-_0-KA_ _Sistema misurazione lunghezza nastri magnetici
italiano2
Prima di installare e mettere infunzione il sensore di spostamentoleggere le presenti istruzioni.
1.1 Uso conforme
Per l'uso, il sensore di spostamentoBML va installato in una macchina oin un impianto. Unitamente all'unitàdi controllo (PLC) costituisce unsistema per la misurazione dellalunghezza e deve essere utilizzatoesclusivamente per questafunzione.
Interventi non autorizzati e l'usoimproprio causano la decadenza diogni garanzia e responsabilità.
1.2 Qualifiche del personale
Le presenti istruzioni sono destinateai tecnici addetti al montaggio,all'installazione e allapredisposizione.
1 Avvertenze per la sicurezza
1.3 Impiego e verifica
Per l'impiego del sensore dispostamento osservare leprescrizioni di sicurezza in materia.Adottare in particolareprovvedimenti che evitino pericoliper persone e cose in caso diguasto del sensore di spostamento.Rientrano in questi provvedimenti ilmontaggio di finecorsa di sicurezzasupplementari, interruttori arrestod'emergenza e l'osservanza dellecondizioni ambientali ammesse.I sensori di spostamento BML nondevono essere installati in sistemisalvavita, aerei, ecc.
1.4 Validità
Le presenti istruzioni valgono peri sensori di spostamento modelloBML-S1C0-...-KAxx.
La panoramica delle varie versioniè reperibile nel Capitolo 11 Versioni(dati sulla targhetta diidentificazione).
Prove emissioni:Irraggiamento radiodisturbi
EN 55011 Gruppo 1, Classe A+BProve immunità alle interferenze:Elettricità statica (ESD)
EN 61000-4-2 Grado di definizione 3Campi elettromagnetici (RFI)
EN 61000-4-3 Grado di definizione 3Impulsi di interferenza rapidi, transitori
(Burst)EN 61000-4-4 Grado di definizione 3
Tensioni impulsive (Surge)EN 61000-4-5 Grado di definizione 2
Disturbi trasmessi dai cavi, indotti dacampi ad alta frequenza
EN 61000-4-6 Grado di definizione 3Campi elettromagnetici
EN 61000-4-8 Grado di definizione 4
Con il marchio CEconfermiamo che i nostriprodotti soddisfano i
requisiti della Direttiva CE
89/336/CEE (Direttiva sullacompatibilità elettromagnetica, EMC)
e della legge sulla compatibilitàelettromagnetica. Nel nostro laboratorioEMC, accreditato dall'ente DATech perprove di compatibilità elettromagnetica,è stato provato e certificato che iprodotti Balluff soddisfano i requisitiEMC delle seguenti norme basilari inmateria:
EN 61000-6-4 (Emissione)
EN 61000-6-2 (Immunità alle interferenze)
Indice
1 Avvertenze per la sicurezza ... 21.1 Uso conforme......................... 21.2 Qualifiche del personale ......... 21.3 Impiego e verifica ................... 21.4 Validità .................................... 2
2 Caratteristichee funzionamento ................... 3
2.1 Caratteristiche ........................ 32.2 Funzionamento ...................... 32.3 Segnali interfaccia .................. 3
3 Montaggio del sensore ........ 43.1 Montaggio del sensore
e del corpo in misurazione(movimento lineare) ................ 4Distanze e tolleranze .............. 4Montaggio della testa sensore ... 5
3.2 Montaggio del sensoree del magnete ad anello(movimento rotatorio) ............. 5
4 Collegamenti ......................... 64.1 Configurazione cavi ................ 64.2 Interfacce ............................... 6
5 Scelta del sistema idoneo diBML e unità di controllo ...... 7
5.1 Determinazione del BML ........ 75.2 Determinazione
dell'unità di controllo .............. 75.3 Sistema BML
con magnete ad anello ............. 8
6 Messa in funzione ................ 96.1 Accensione del sistema ......... 96.2 Verifica funzionamento sistema .... 96.3 Verifiche periodiche ................ 96.4 Anomalie di funzionamento .... 9
7 Accessori .............................. 97.1 Nastro di copertura ................ 98 Eliminazione dei guasti ...... 109 Dati tecnici .......................... 1110 Volume di fornitura ............. 1111 Versioni (dati sulla targhetta
di identificazione) ............... 12

BML-S1C0-Q53_-M400-_0-KA_ _Sistema misurazione lunghezza nastri magnetici
3italiano
2 Caratteristiche e funzionamento
BML è un sistema, incrementale e senza contatto, di misurazione dellospostamento, composto da una testa sensore e da un corpo in misurazione.La funzione di misurazione è eseguita mediante scansione magnetica.
Fig. 2-1: Sistema misurazione lunghezza con sensori incrementali
Sensoriincrementali
Corpo in misurazione conpoli Nord e Sud alternati
Testa sensore
2.1 Caratteristiche
I sistemi misurazione spostamentoBML si contraddistinguono per:– alta precisione del sistema fino a
100 µm– alta risoluzione fino a 100 µm– alta precisione di ripetitività pari
a ±1 incrementi– alta velocità di traslazione fino a
10 m/s– segnale posizione in tempo reale– insensibilità a scosse, vibrazioni
e sporcizia come polvere o olio– non soggetti a usura ed esenti da
manutenzione– elevata robustezza– classe di protezione IP 67
secondo IEC 60529
2.2 Funzionamento
La testa sensore va montata sulla partemacchina di cui si desidera rilevare laposizione; il corpo magnetico inmisurazione va invece fissato lungoil percorso di misurazione. Sulcorpo in misurazione si trovano polimagnetici Nord e Sud alternati.
I due sensori incrementali nella testasensore misurano il campomagnetico alternativo.
Nell'oltrepassare senza contatto ilcorpo in misurazione, i due sensoriincrementali nella testa sensorescandiscono i periodi magnetici,l'unità di controllo può così rilevarela distanza percorsa.
2.3 Segnali interfaccia
La testa sensore converte i segnalidei sensori incrementali in impulsidigitali A/B e li trasmette all'unità dicontrollo.
I due impulsi digitali A e B sonosfasati elettricamente di 90°, ilsegno dello sfasamento dipendedalla direzione del movimento delsensore (Fig. 2-2).Ogni cambiamento di fronte di A oB è un passo di conteggio per il
contaperiodi (contatore up/down).Con segnale A anticipato, ilcontatore progredisce, con segnaleB anticipato regredisce. L'unità dicontrollo quindi conosce in ognimomento la posizione esatta diincremento senza dover interrogareperiodicamente il sensore (capacitàtempo reale).
Attenzione: per un correttofunzionamento è necessarioutilizzare i segnali A e Bin relazione alla direzione.
Fig. 2-2: Segnali di uscita BML con contaperiodi
Segnale A
Segnale B
Incremento
Direzione movimento
Stato contatore
Avanti Indietro

BML-S1C0-Q53_-M400-_0-KA_ _Sistema misurazione lunghezza nastri magnetici
italiano4
3 Montaggio del sensore
Nell'installazione, prestare lamassima attenzione a quantosegue:
Attenersi rigorosamente alle tolle-ranze lineari e angolari ammessecome da Fig. 3-2, 3-3 e 3-4.La testa sensore non devetoccare il corpo in misurazionelungo tutto il percorso dimisurazione. Evitare il contattoanche quando il corpo inmisurazione è coperto dal nastrodi copertura inox (opzione).Il corpo magnetico in misurazionenon deve essere influenzato daforti campi magnetici esterni.Evitare assolutamente il contattodiretto con morsetti magnetici oaltri magneti permanenti.Installare il sistema misurazionespostamento conformemente allaclasse di protezione indicata.
Distanze e tolleranze
Nel montaggio della testa sensore edel corpo in misurazione osservareassolutamente le seguenti distanzee tolleranze:– Distanza (luce) tra testa sensore
e corpo in misurazione come daFig. 3-2
– Disallineamento orizzontale tratesta sensore e corpo inmisurazione come da Fig. 3-3
– Tolleranze angolari come daFig. 3-4. Nell'inclinazione lungol'asse longitudinale della testasensore, la distanza nominale dalcorpo in misurazione deve esseretenuta al centro della testa.Qui, sulla parte inferiore si trovanoi due sensori incrementali.
Avvertenza:Persino scostamenti minimi daivalori di tolleranza possonocompromettere il risultato dellamisurazione.
La precisione specificata delsistema vale solo se il corpo inmisurazione è montatoparallelamente alla direzione ditraslazione.
Fig. 3-1: Disegno quotato
Corpo inmisurazione
Fig. 3-4: Tolleranze angolari ammesse
Fig. 3-2: Distanza ammessa tra testasensore e corpo in misurazione
Corpo inmisurazione
Nastro dicoperturainox
Fig. 3-3: Tolleranza orizzontaleammessa a destra o sinistra
3.1 Montaggio del sensore e del corpo in misurazione (movimento lineare)

BML-S1C0-Q53_-M400-_0-KA_ _Sistema misurazione lunghezza nastri magnetici
5italiano
3 Montaggio del sensore (continua)
Montaggio della testa sensore
La parte destra o sinistra della testasensore va fissata con viti M3 allaparte macchina di cui si desiderarilevare la posizione.
Importante!Il cavo della scatola non deveessere sottoposto a sollecitazioni.Dotare il cavo di dispositivosoppressione sollecitazioni.
Avvertenza:
Per un'esauriente descrizionetecnica e per le Istruzioni dimontaggio del corpo inmisurazione vedere le Istruzioni perl'uso del corpo in misurazione,all'indirizzo www.balluff.it
Raccomandazione per la sceltadel corpo in misurazione
Corpo in misurazione BML-M02-I46o magneti ad anello
3.2 Montaggio del sensore e dei magneti ad anello (movimento rotatorio)
Nell'installazione, prestare lamassima attenzione a quanto segue:
Attenersi rigorosamente alle tolle-ranze di disallineamento ammessecome da Fig. 3-5, 3-6 e 3-7.La testa sensore non deve toccare ilmagnete ad anello.Il magnete ad anello non deveessere influenzato da forti campimagnetici esterni.
Fig. 3-5: Distanza ammessa Fig. 3-6: Disallineamento assialeammesso
Fig. 3-7: Disallineamento tangenzialeammesso
Evitare assolutamente il contattodiretto con morsetti magnetici oaltri magneti permanenti.Installare il sistema misurazionespostamento conformemente allaclasse di protezione indicata.
Il sensore può essere montato conl'uscita cavo verso destra o versosinistra rispetto al magnete adanello (Fig. 3-6).
Avvertenza:
Per un'esauriente descrizionetecnica e per le Istruzioni dimontaggio dei magneti ad anellovedere le Istruzioni per l'uso,all'indirizzo www.balluff.it
Sensoriincrementali
Vista latoposteriorecon cavo
Vista latofrontale

BML-S1C0-Q53_-M400-_0-KA_ _Sistema misurazione lunghezza nastri magnetici
italiano6
4 Collegamenti
Nel collegamento elettrico,prestare la massima attenzione
a quanto segue:
Impianto e armadioelettrico devono avere lo
stesso potenziale di terra.
Per garantire la compatibilitàelettromagnetica (EMC),confermata con il marchio CE dalladitta Balluff, prestare la massimaattenzione alle seguentiavvertenze.
Sul lato unità di controllo mettere aterra la schermatura del cavo,ossia collegarlo con il conduttoredi protezione.
Nella posa del cavo tra rilevatorespostamento, unità di controllo ealimentazione di corrente, evitarela vicinanza di linee ad altatensione a causa dell'interferenzadi disturbi.Particolarmente critiche sono leinterferenze induttive dovute adarmoniche di rete (ad es. comandia ritardo di fase), per le quali la
schermatura del cavo offre scarsaprotezione.
Lunghezza cavo max. 20 m;sezione trefolo min. 0,14 mm2,max. 0,5 mm2. È possibile utilizzarecavi più lunghi, se si riescono adevitare i campi estranei di disturbocon installazione, schermatura eposa.Prestare la massima attenzione:A causa delle cadute di tensionenella linea di alimentazione occorreassicurare al sensore una tensionedi esercizio nominale di 10 - 30 V.
4.1 Configurazione cavi
Cavo Segnale
WH bianco A
GN verde B
BU blu GND
RD rosso 10...30 V
BK nero schermatura
4.2 Interfaccia
Sistema di misurazione digitaleincrementale
Il sensore trasmette la grandezzamisurata come livello della tensionedi esercizio (HTL) all'unità dicontrollo.
La distanza fronte A/B corrispondealla risoluzione della testa sensore.
Fig. 4-1: Segnali digitali di uscita
Periodo segnale 360° el.
el.
Distanza fronte

BML-S1C0-Q53_-M400-_0-KA_ _Sistema misurazione lunghezza nastri magnetici
7italiano
5 Scelta del sistema idoneo di BML e unità di controllo
5.1 Determinazione delsistema BML idoneo perl'unità di controllo esistente(movimento lineare)
Esempio (vedere Tabella 5-1)Presupposti:- L'unità di controllo deve poter
rilevare una distanza fronteminima pari a 60 µs. Qualora nonsia presente un BML con questadistanza fronte minima, occorreràscegliere un BML con distanzafronte maggiore.
- La velocità di traslazionemassima del sistema deveessere pari a 2 m/s.
Determinazione del BML idoneo:- Occorre un BML con distanza
fronte minima di 100 µs(caratteristica modello R)
- Per consentire una traslazionemassima di 2 m/s, scegliere ilmodello con risoluzione 500 µm(caratteristica modello N)
La Tabella 5-1 illustra il rapportotra la distanza fronte minima, larisoluzione e la velocità ditraslazione massima per sistemiBML con corpo magnetico inmisurazione.
Importante!L'unità di controllo/lavisualizzazione devono poterconteggiare le distanze frontetemporali minime indicate nelletabelle (attenersi alla frequenza diconteggio dell'unità di controllo).La distanza fronte minima puòanche presentarsi a macchina ferma,a causa del processod'interpolazione interna.
5.2 Determinazione dell'unitàdi controllo idonea peril sistema BML esistente(movimento lineare)
Quale frequenza di conteggiomassima deve avere l'unità dicontrollo? Il periodo del segnale diingresso è pari al quadruplo delladistanza fronte (vedere Fig.4-1).La frequenza massima del segnaledi ingresso è quindi pari a1/ (4 x distanza fronte). Nell'analisi4x, la frequenza di conteggiomassima dell'unità di controllo èpari a 1/distanza fronte.
Esempio:Per il modello BML M con distanzafronte 10 µs, la frequenza massimadel segnale di ingresso è pari a1/(4x10 µs) = 25 kHz. La frequenzadi conteggio massima per un'analisi4x = 1/10 µs = 100 kHz.
Nel BML, la velocità di traslazione massima varia in funzione della distanzafronte minima e della risoluzione meccanica (vedere Tabella 5-1).Nella tabella, X identifica la distanza fronte temporale minima del modelloBML e Y la risoluzione meccanica (vedere Codice identificativo).
Tabella 5-1: Rapporto tra distanza fronte minima, risoluzione meccanica evelocità di traslazione massima
Distanza fronte min. X:M = 10 µs R = 100 µs
Risoluzione Y Vmax in funzione di distanza fronte e risoluzione
L = 100 µm 8 m/s 0,9 m/s
M = 200 µm 10 m/s 1,8 m/s
N = 500 µm 10 m/s 4,2 m/s
P = 1000 µm 10 m/s 8,8 m/s
R = 2000 µm 10 m/s 10 m/s
BML-S1C0-Q53L-M400-R0-KA05 (modello di esempio)distanza fronte minima X (per lacaratteristica vedere la tabella)
risoluzione meccanica Y (per lacaratteristica vedere la tabella)

BML-S1C0-Q53_-M400-_0-KA_ _Sistema misurazione lunghezza nastri magnetici
italiano8
La Tabella 5-2 illustra il rapporto trala risoluzione meccanica e gliimpulsi/giro per sistemi BML conmagneti ad anello.
Passaggio 1
Occorre innanzitutto decidere ilnumero di impulsi per giro necessariper l'applicazione prevista. In basea tale parametro si desumeranno ildiametro esterno del magnete adanello e la risoluzione della testasensore, nonché il modello di testasensore.
La Tabella 5-2 indica per ciascunmagnete ad anello il rapporto fra ilnumero di impulsi per giro e larisoluzione della testa sensore.
Esempio (vedere Tabella 5-2):– L'applicazione necessita di 500
impulsi/giro.– Tali impulsi vengono generati dal
sistema BML, composto da unatesta sensore con risoluzione200 µm (caratteristica modello M)e da un magnete ad anelloBML.-M2x...031.
5.3 Definizione della risoluzione e del numero di giri massimo con sistemi BML con magnete ad anello (movimento rotatorio)
Passaggio 2
Se il numero di giri dell'applicazioneè stabilito con certezza, scegliere (inbase al magnete ad anello sceltonel Passaggio 1 e alla risoluzione) latesta sensore con la larghezza fron-te minima corrispondente al numerodi impulsi/giro definito.
Esempio:
Presupposti:– Il numero di impulsi definito è
pari a 500/giro (vedere Passaggio1: anello BML-M2x...031 erisoluzione BML 200 µm).
– Il numero di giri massimo deveessere pari a 900 min-1.
Tabella 5-2: Impulsi/giro del sistema di BML-S1C... e magneti ad anello
Modello magnete ad anello BML-M2...031/... BML-M2...048/... BML-M2...072/...
Numero poli 20 32 46
Risoluzione Y Impulsi per girotesta sensore con analisi 4x
L = 100 µm 1.000 1.600 2.300
M = 200 µm 500 800 1.150
N = 500 µm 200 320 460
P = 1000 µm 100 160 230
R = 2000 µm 50 80 115
Determinazione della testa sensoreBML idonea (vedere Tabella 5-3):– All'interno della colonna
"M = 200 µm, 500 impulsi",ricercare la riga che riporti unnumero di giri maggiore di quellodesiderato.La testa sensore idonea è quellacon distanza fronte 100 µm(caratteristica modello R).In combinazione con il magnetead anello BML-M2x...031, essasoddisferà i requisiti del sistema.
Tabella 5-3:Numeri di giri massimi in funzione della distanza fronte minima e della risoluzione meccanica con magnete ad anelloBML-M2x...031 con diametro esterno 31 mm
Risoluzione meccanica Y L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Impulsi/giro 1000 500 200 100 50
Distanza fronte min. X kHz max. segn. A/B N. giri max. con magnete ad anello BML-M2x...031...
M = 10 µs 25 4.800 6.000 6.000 6.000 6.000
R = 100 µs 25 540 1.080 2.520 5.280 6.000
Le Tabelle 5-3 e 5-5 illustrano ilrapporto tra la distanza fronteminima, la risoluzione meccanica eil numero di giri massimo persistemi BML con magneti ad anello.
BML-S1C0-Q53L-M400-R0-KA05 (modello di esempio)
distanza fronte min. X(per le caratteristiche vedere le Tabelle 5-3 - 5-5)
risoluzione mecc. Y(per le caratteristiche vedere le Tabelle 5-3 - 5-5)
Esempio:
5 Scelta del sistema idoneo di BML e unità di controllo

BML-S1C0-Q53_-M400-_0-KA_ _Sistema misurazione lunghezza nastri magnetici
9italiano
Tabella 5-4:Numeri di giri massimi in funzione della distanza fronte minima e della risoluzione meccanica con magnete ad anelloBML-M2x...048 con diametro esterno 48 mm
Risoluzione meccanica Y L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Impulsi/giro 1600 800 320 160 80
Distanza fronte min. X kHz max. segn. A/B N. giri max. con magnete ad anello BML-M2x...048...
M = 10 µs 25 3.000 3.750 3.750 3.750 3.750
R = 100 µs 25 338 675 1.575 3.300 3.750
Tabella 5-5:Numeri di giri massimi in funzione della distanza fronte minima e della risoluzione meccanica con magnete ad anelloBML-M2x...072 con diametro esterno 72 mm
Risoluzione meccanica Y L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Impulsi/giro 2300 1150 460 230 115
Distanza fronte min. X kHz max. segn. A/B N. giri max. con magnete ad anello BML-M2x...072...
M = 10 µs 25 2.087 2.609 2.609 2.609 2.609
R = 100 µs 25 235 470 1.096 2.296 2.609
6 Messa in funzione
6.1 Accensione sistema
Considerare che all'accensione ilsistema può eseguire movimentiincontrollati, in particolare alla primaaccensione e laddove il dispositivodi misurazione della lunghezzafaccia parte di un sistema diregolazione i cui parametri non sianoancora impostati. Accertarsi che talimovimenti non generino pericoli.
6.2 Verifica funzionamentosistema
Terminato il montaggio del sistemamisurazione spostamento, o dopola sostituzione della testa sensore,procedere alla verifica di tutte lefunzioni come segue:1. Inserire la tensione di
alimentazione della testa sensore.2. Traslare la testa sensore lungo
l'intero percorso di misurazione/per l'intero numero di giri.
3. Verificare l'emissione di tutti isegnali.
4. Verificare che direzione diconteggio e direzione ditraslazione/senso di rotazionecoincidano.Se non coincidono, scambiare icollegamenti A e B.
7.1 Nastro di copertura(da ordinare separatamente)
Incollare un nastro di copertura inoxsul corpo in misurazione lineare perproteggerlo da danni dovuti a truciolio prodotti chimici.Considerare che la luce ammessa tratesta sensore e nastro di misurazionediminuisce dello spessore del nastrodi copertura con il film adesivo(0,15 mm) (Fig. 3-2). Prima di incollareil nastro di copertura pulireaccuratamente la superficie del corpoin misurazione (acetone, detergentedelicato per plastica, trementina; nonutilizzare benzina).
Varianti di fornitura:1 Nastro di copertura e corpo in
misurazione possono essereordinati insieme alla lunghezzadesiderata.
2 Il nastro di copertura può essereordinato separatamente in 4lunghezze definite.
7 Accessori
6.3 Verifiche periodiche
La funzionalità del sistema dimisurazione e di tutti i relativicomponenti deve essere verificata eprotocollata periodicamente.
6.4 Anomalie di funzionamento
Se si rilevano sintomi dimalfunzionamento, mettere fuoriservizio il sistema e assicurarlocontro l'uso da parte di persone nonautorizzate (vedere Eliminazione deiguasti).
Avvertenza:
Per un'esauriente descrizione tecnicae per il codice d'ordine del nastro dicopertura vedere le Istruzioni per l'usodel corpo in misurazione, all'indirizzowww.balluff.it
5 Scelta del sistema idoneo di BML e unità di controllo

BML-S1C0-Q53_-M400-_0-KA_ _Sistema misurazione lunghezza nastri magnetici
italiano10
8 Eliminazione dei guasti
Errore
L'unità di controllo non riceve(saltuariamente) informazioni sullospostamento.
In determinati punti, l'unità dicontrollo non riceve informazionisullo spostamento.
Forti fruscii del segnale diposizione.
Scostamento di linearità fuoritolleranza.
Causa probabile
Manca la tensione di alimentazione.
Eccessiva caduta di tensione.
Linee non correttamente allacciate.
Errata distanza tra testa sensore ecorpo in misurazione(saltuariamente).
Poli magnetici del corpo inmisurazione danneggiatisaltuariamente da forti magneti.
Eccessiva distanza tra testa sensoree corpo in misurazione.
La testa sensore non si muoveparallelamente al corpo inmisurazione (per la tolleranzavedere Fig. 3-4).Eccessiva distanza tra testa sensoree corpo in misurazione.
Rimedio/Descrizione
Controllare se vi è tensione e se ilBML è correttamente collegato.
Il sistema deve indicare 10...30 V.
Verificare le linee in base aglischemi elettrici.
Regolare in altezza la testa sensore.Per la verifica, traslare a mano latesta lungo l'intero percorso dimisurazione.
Sostituire il corpo in misurazione.
Fissare la testa sensore a brevedistanza dal corpo in misurazione.
Posizionare correttamente la testasensore (Cap. 3).

BML-S1C0-Q53_-M400-_0-KA_ _Sistema misurazione lunghezza nastri magnetici
11italiano
Dati elettriciUscitaSegnale di uscitaRisoluzioneTensione di uscitaPrecisione del sistemaIsteresiScostamento di linearità max. (Lin 1)testa sensore, unidirezionaleScostamento di linearità max. (Lin 2)corpo magnetico in misurazione,unidirezionale, lunghezzamisurazione max. 24 mScostamento di linearità max. interosistema (Lin 1 + Lin 2)Coefficiente temperatura interosistema come acciaioVelocità di traslazione max.Protezione inversione polaritàProtezione sovratensioneTensione di esercizioAssorbimento di correntecon tensione di esercizio 10...30 VSollecitazione ammessa agli shocksecondo IEC 60068-2-27 1
Shock continuosecondo EC 60068-2-29 1
Sollecitazione ammessa allevibrazioni secondo IEC 60068-2-6 1
Condizioni ambientaliTemperatura di esercizioTemperatura di magazzinaggioClasse di protezione secondo IEC 60529
Dati meccaniciDistanza testa sensore - corpo inmisurazioneMateriale scatolaTipo di collegamentoPeso
Modello BML-S1C0-Q53...livello della tensione di alimentazione (HTL)Segnale A, segnale B (segnali digitali rettangolari)100 µm, 200 µm, 500 µm, 1000 µm, 2000 µmcome tensione di esercizio 10...30 V senza A/B (HTL)±100 µm< 1 incremento±50 µm
±50 µm
±100 µm (testa sensore + corpi in misurazione)
10,5 x 10-6 K-1
10 m/ssìno10...30 V< 40 mA + assorbimento di corrente unità di comando(secondo la resistenza interna)100 g/6 ms
100 g/2 ms
12 g, 10...2000 Hz
–20 °C...+80 °C–30 °C...+85 °CIP67
0,01...2 mm
PlasticaCavo a 4 fili, schermato (LIf12YFCF11Y 6×2×0,08 mm2)11 g senza cavo
9 Dati tecnici
1 Determinazione singola secondo norma di fabbricazione Balluff
CavoModello
Temperatura di esercizio montaggio flessibile montaggio fissoDiametro cavoRaggio di flessione cavo montaggio flessibile montaggio fisso
cavo PU a 4 fili, schermato,ottimizzato per catene di trasc.
–20...80 °C–40...90 °C5,4 +0,2 mm
81 mm41 mm
10 Volume di fornitura
Testa sensoreIstruzioni brevi

BML-S1C0-Q53_-M400-_0-KA_ _Sistema misurazione lunghezza nastri magnetici
italiano12
11 Versioni
Codice identificativo per testa sensore (dati sulla targhetta di identificazione)
BML - S1C0 - Q 5 3 L - M 4 0 0 -R 0 - KA05 (esempio)
Tipo di collegamento: KA05 = cavo 5 m Lunghezze disponibili: 2, 5, 10, 15, 20 m
Distanza fronte min.: M = 10 µs R = 100 µs
Finecorsa 0 = nessun finecorsa
Segnale di riferimento 0 = nessun segnale
Larghezza poli 4 = 5 mm
Risoluzione (distanza fronte A/B) L = 100 µm M = 200 µm N = 500 µm P = 1000 µm R = 2000 µm
Tensione di uscita 3 = segnale differenziale digitale HTL
Tensione di esercizio 5 = 24 V (10...30 V)
N. 8
48 7
35-7
26 I
• 01
.108
392
• E
diz
ione
071
1; c
on r
iser
va d
i mod
ifich
e •
Sos
titui
sce
l'ed
izio
ne 0
608