using preference information in developing alternative forest plans
TRANSCRIPT

Using preference information in developingalternative forest plans
Kyle Eyvindson, Annika Kangas, Mikko Kurttila, and Teppo Hujala
Abstract: The development of new alternative plans based on applying multicriteria decision making (MCDM) techniquesin discrete choice situations has received little attention in the context of forest planning. This article proposes a two-stageapproach to be applied in participatory decision-making situations in which a specific number of initial alternatives areevaluated by the decision makers (DMs) using MCDM analysis. The preference information, obtained from these analysesin the form of target values, is then used for generating still more efficient forest plans. This paper concentrates on the lat-ter stage and tests nine different goal programming (GP) formulations. This paper uses the formulas and preference infor-mation obtained from a case study of three forest owners to generate new forest plans. Among the tested techniques,formulas with a penalty function provided the most appropriate plans. These GP formulations could enhance the participa-tory planning processes in which a discrete number of alternatives are evaluated. With further development, this processcould be applied to a variety of forest ownership types and could be a useful tool in supporting group decision making.This proposed approach could facilitate an increase in the DMs’ satisfaction and an increased commitment towards the de-rived decision.
Resume : Le developpement de nouveaux plans alternatifs bases sur l’application des techniques de prise de decision mul-ticriteres (PDMC) dans les situations qui comportent des choix discrets a ete peu etudie dans le contexte de l’amenagementforestier. Cet article propose une approche en deux phases a appliquer dans les situations de prise de decision participativeou un nombre specifique d’options de depart sont evaluees par les decideurs a l’aide de l’analyse PDMC. L’informationau sujet des preferences, tiree de ces analyses sous forme de valeurs cibles, est ensuite utilisee pour generer des plansd’amenagement encore plus efficaces. Cet article se concentre sur cette derniere phase et teste neuf formulations differen-tes de programmation des objectifs. Cet article utilise les formules et l’information au sujet des preferences provenantd’une etude de cas de trois proprietaires forestiers pour generer de nouveaux plans d’amenagement. Parmi les methodestestees, les formules avec une fonction de penalite fournissaient les plans les plus appropries. Ces formulations de pro-grammation des objectifs pourraient ameliorer les processus participatifs de planification lorsqu’un nombre discret d’op-tions est evalue. En le developpant davantage, ce processus pourrait etre applique a une variete de types de proprietaireforestier et pourrait etre un outil utile pour faciliter la prise de decision en groupe. L’approche qui est proposee pourraitcontribuer a augmenter la satisfaction des decideurs et a accroıtre l’engagement envers l’option qui a ete retenue.
[Traduit par la Redaction]
Introduction
In privately owned forests, it is typical for a professionalplanner to create a plan with minimal input from the forestowner(s) or decision maker(s) (DMs). A similar case existsfor participatory planning situations, but rather than develop-ing a single forest plan, a limited number of alternatives aregenerated so that DMs may select the most appropriate andleast disagreeable forest plan (e.g., Pykalainen et al. 2007;Hiltunen et al. 2009). Alternative forest plans are developedaccording to the priorities that participants consider impor-tant within certain guidelines defined for the use of the for-ests. Although this may generate an efficient range ofalternative forest plans, they may not correspond optimallyto the preferences of the DMs. In some cases, the planner
may request preference information from the DMs, which isusually limited in scope and focuses on specific constraintsor relevant criteria. By focusing on those specific constraintsor criteria, the focus of the overall plan could be shiftedfrom those local priorities to those expert views held by theplanner, whereas the developed forest plan should corre-spond to the priorities and preferences of the DMs.
In a group setting, individual preferences can be elicitedusing techniques such as linking analytic hierarchy processwith group decision making (e.g., Belton and Pictet 1997;Beynon 2006; Nordstrom et al. 2009). These approachestypically require selecting the best plan among the prede-fined alternatives. Typically, the planning consultant gener-ates predefined alternatives focusing on plans that span thedecision space (cf. Laukkanen et al. 2004; Nordstrom et al.
Received 26 February 2010. Accepted 15 September 2010. Published on the NRC Research Press Web site at cjfr.nrc.ca on23 November 2010.
K. Eyvindson1 and A. Kangas. University of Helsinki, Department of Forest Sciences, Latokartanonkaari 7, P.O. Box 27, Helsinki00014, Finland.M. Kurttila and T. Hujala. Finnish Forest Research Institute Metla, P.O. Box 68, FI-80101 Joensuu, Finland.
1Corresponding author (e-mail: [email protected]).
2398
Can. J. For. Res. 40: 2398–2410 (2010) doi:10.1139/X10-179 Published by NRC Research Press
Can
. J. F
or. R
es. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y D
AL
HO
USI
E U
NIV
ER
on
06/1
0/14
For
pers
onal
use
onl
y.

2009). Belton and Stewart (2002) have identified methodsfor developing new alternative plans through creative think-ing and screening suitable alternatives. Methods for screen-ing suitable alternatives, e.g., data envelope analysis (Beltonand Stewart 1999), should generate a representative set ofalternatives within the range of possibilities. Nevertheless,the development of alternative plans based on applying multi-criteria decision-making (MCDM) techniques in discretechoice situations has received little attention in the contextof forest planning.
To provide the DMs with an opportunity to make a genu-ine choice, the presentation of true and illustrative alterna-tives is necessary (cf. Sheppard and Meitner 2005;Pykalainen and Kurttila 2009). This is particularly true indecision making in which there are relevant trade-offs be-tween multiple criteria. Often, even for relatively smallplanning problems, it is possible to create meaningful newplans that clearly differ from each other.
Preference information used in multicriteria decision-making situations helps to determine which alternative isthe most suitable (Diaz-Balteiro and Romero 2008). In itsessence, the field of multicriteria decision analysis is agroup of quantitative techniques that focus on comparingdifferences between a specified set of alternatives (Kangasand Kangas 2005; Mendoza and Martins 2006; Kangas etal. 2008; Ananda and Herath 2009). The information ob-tained from these tools focuses on identifying the best al-ternative but does not generate information on howimproved alternatives could be generated. Therefore, addi-tional analysis based on the preferences of the DMs andpossibly on properties of the selected plan could result inan even better plan.
To generate alternatives to match the desires of the DMs,it is necessary to have at least a basic understanding ofwhich indicators are critical and at which level the DMswould be satisfied. It is typically assumed that the DMshave a reasonable understanding of the potential and produc-tion possibilities available and know, in rather exact terms,what they want. In most cases, this assumption is not neces-sarily appropriate, and the DM may only know at whichlevel they will be satisfied. From this ‘‘satisficing’’ position,i.e., obtaining an adequate solution rather than an optimalsolution, it is possible to create new alternatives that im-prove the expected indicator values of the plan to achieve amore optimal plan.
This paper describes a two-stage method for developingalternative forest plans based on the DMs’ preference infor-mation. The intended result is a process model that can beused in a wide variety of circumstances in which alterna-tives are needed to better correspond to DMs’ preferences.In addition to multiple-owner forest holdings, the two-stagemethod of creating decision alternatives could be used incontexts of participatory land-use planning of public forests(Pykalainen et al. 2007), participatory landscape-level forestplanning (Sheppard 2005), and regional forest policy proc-esses, in particular with expertise-oriented stakeholders(Kangas et al. 2010).
The first stage teaches DMs about the production possibil-ities and obtains preference information from the DMs. Thesecond stage helps refine preferences and identify a more ef-ficient compromise alternative. In the first stage, preference
information is obtained and DMs’ learning is facilitatedthrough a decision support tool, specifically Mesta (Hiltunenet al. 2009). The main emphasis of this paper is to exploreand evaluate different goal programming (GP) (Tamiz et al.1998) formulations for developing new forest plans based onthe preference information. The proposed method takes theowners’ preference information and identifies a number ofefficient compromise alternatives.
The discourse of this paper is divided into three sections.The first section describes in detail the proposed decision-aid process and how various GP formulations can be usedin the development of alternatives. The second sectionpresents a case study in which the preference elicitation andthe application of GP is illustrated. The third section dis-cusses both the theoretical and empirical issues brought upby the preceding two sections.
Theoretical framework
Goal programmingGoal programming is a specific type of linear program-
ming in which the objective function strives to meet the re-quirements of a set of goals (or targets) as closely aspossible. The solution derived from GP is dependent onthree main aspects. The first is for the DM to provide valuesfor a set of goals with which he (she) would be satisfied, thesecond is the weight (or importance) that the DM assigns toeach particular goal, and the third is the GP formulationused in the analysis. The first two aspects are directly re-lated to the input required by the DM, whereas the last as-pect is related to the technical nature of how the objectivefunction is optimized.
The history of GP in forestry spans nearly four decades; itwas first applied to forestry by Field (1973) through a land-use planning application. Later, Field et al. (1980) and Hot-vedt (1983) applied GP to scheduling of forest harvest.Walker (1985) and Mendoza (1986) developed differentmethods for deriving appropriate target levels within GP.Kangas and Pukkala (1992) used the analytic hierarchyprocess as a means to estimate the weights of deviationsfrom the target levels in GP. More recently, Gomez et al.(2006) used a linear fractional goal programming model toschedule timber harvest, and Bertomeu et al. (2009) usedGP in optimizing the forest management of Eucalyptus plan-tations.
A wide variety of GP formulations have been used tosolve a range of problems in various subjects (Scniederjans1995). Different types of preference information can be usedas targets for GP formulations; the parameters can be ad-justed to accommodate changes in the information. Mesta, adecision support tool that compares and evaluates holdinglevel forest plans, was used in this study to obtain minimumthreshold targets. The reasoning behind having the DMs in-dicate their minimum preference value is that it demon-strates the requirement for trade-offs between indicators andimplicitly indicates how willing they are to compromise.Mesta obtains the minimum preference values through theuse of a graphical user interface and, as a result, providespseudo-precise values for continuous indicators. By creatingalternative plans based on different GP formulations, prefer-
Eyvindson et al. 2399
Published by NRC Research Press
Can
. J. F
or. R
es. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y D
AL
HO
USI
E U
NIV
ER
on
06/1
0/14
For
pers
onal
use
onl
y.

ence information obtained from the DMs is integrated in asystematic manner and is based on a clear theoretical basis.
The enhanced process of decision makingThe process in developing alternative plans occurs after
the DMs become acquainted with the production potentialof the planning area described through initial alternativesand after they have provided the consultant with their targetvalue for their selected indicators. When generating newplan alternatives for group decision-making problems, thetwo-stage process can be further broken down into fourphases:
stage 1
phase 1: develop alternative plans that span the deci-sion space for the problem;phase 2: obtain preference information from the DMs;
stage 2
phase 3: utilize the GP formulations to develop alterna-tive plans that incorporate the DM’s preferences;phase 4: deliver generated alternative plans to the DMsand have them select the optimal plan (or continuewith negotiations).
This paper focuses on the technical utilization of GP formu-lations to develop new plans. Appropriate consideration ofall phases is required so that the development of the newplans is completed in a meaningful way.
Stage 1 — phase 1: developing alternative plans that spanthe decision space for the problem
To obtain preference information, which is relevant to thetask of creating alternative forest plans, the DMs need to beinformed of the potential options available to them. Thistype of alternative plan generation occurs frequently in par-ticipatory planning processes as a demonstration of the po-tential and requirement for compromise between theparticipants (e.g., Hiltunen et al. 2009). In addition to theextreme cases, several intermediate options should be cre-ated to provide the DMs with an understanding of the trade-offs required between competing aspects of the plan.
With a small group, or a group that shares a similar set ofvalues, the acceptable decision space for the group may besmaller than the theoretical decision space. It might be ben-eficial to pre-emptively exclude the obviously unacceptabledecision space when acquiring the preference information.A possible way to facilitate this would be to create a fewextreme plans and conduct a preliminary interview with theinformation acquired to gain a rough idea of the DMs re-quirements for the plan. In this way, the preference informa-tion obtained should be more precise and relevant.
Stage 1 — phase 2: obtaining preference informationThis phase makes use of decision support tools that gener-
ate a specific acceptance level for a variety of goals. The ex-plicit statement of an acceptance level for goals from theDM provides a basis for the generation of new (possiblymore appropriate) plans. When the decision process involvesmultiple DMs, acquiring acceptance levels for goals that areimportant to an individual DM provides the opportunity tomerge the preferences of all DMs and attempt to find newplans that better satisfy the preferences of all DMs. Obtain-
ing acceptance levels for different goals can be done explic-itly (i.e., by asking directly) or implicitly through decisionsupport tools.
It is important to reflect on how preference informationwill be obtained prior to starting collection because this in-formation will influence how the different GP formulationsoperate. For instance, if the preference information obtainedis at the minimum acceptable threshold, then deviations be-low that level should be penalized harshly. If the preferenceinformation describes the optimum value of the indicators,then perhaps the DM would be more willing to accept val-ues slightly less than the optimum, requiring a change inhow the penalty function operates in some of the GP formu-lations.
Obtaining the preference information from each DMshould be done in such a way that each individual clearlyunderstands the trade-offs between competing indicators.Some of the DMs may not fully comprehend the technicalterms being used, so nonjudgemental guidance should beprovided to assist each DM. Depending on the requirementsof each DM, this could require a range of direct and indirectcommunications from the consultant.
Stage 2 — phase 3: developing new plansThe proposed approach is to combine the individual ob-
jective functions together (rather than requiring the DM toagree on appropriate goals) and then maximize the group’sobjective function together. In this way, each DM can inde-pendently select which indicator is important and set an ap-propriate target for that indicator. Each DM is treated in thesame manner, and the preference information remains unal-tered. If the decision is to be made in an unequal manner(e.g., one stakeholder controls 50% of the rights, and twoother stakeholders control 25% each), the weightings ofDMs can be used. To ensure that preferences are weightedappropriately, the individual objective function will be div-ided by the number of indicators selected. For instance, ifan individual is truly multi-objective and has a precise targetfor each indicator, his (her) objective function will carry thesame weight as that of another individual who is only con-cerned with a single objective. In this way, there is no in-centive to give target values for indicators that have nointerest to the individual DM. If they do not know which in-dicators would be appropriate, a default list of indicatorsshould be available with explanations as to what the indica-tors represent.
Developing new plans that incorporate preference infor-mation should reduce the range of possibilities for many ofthe indicators. This primarily occurs because the DMs areguided to select target values within the production potentialof the problem considered. If preference information foreach DM is similar for a particular indicator, all correspond-ing plans will probably have a value to attain, or nearly at-tain, that preference. This will result in a smaller number ofoptions from which the DMs need to select, while providingthe DMs with choices more relevant to their wishes. If thepreferences of the DMs are not compatible (e.g., in a forestownership situation in which one DM may want to maxi-mize profit and another may not want harvesting), thenplans generated by the GP formulations will represent possi-
2400 Can. J. For. Res. Vol. 40, 2010
Published by NRC Research Press
Can
. J. F
or. R
es. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y D
AL
HO
USI
E U
NIV
ER
on
06/1
0/14
For
pers
onal
use
onl
y.

ble compromise solutions in which both perspectives areconsidered.
To facilitate this process, the following goal programmingformulations are considered:
1. weighted GP, WGP (Ignizio 1976);2. weighted interval GP (K, K’), WIGP(K, K’) (Jones and
Tamiz 1995);3. MINMAX GP, MGP (Flavell 1976);4. MINMAX interval GP (K, K’), MIGP(K, K’) (Vitoriano
and Romero 1999);5. extended GP, EGP (Romero 2001);6. extended interval GP (K, K’), EIGP(K, K’) (Vitoriano and
Romero 1999);7. lexicographic GP, LGP (Ignizio 1976);8. lexicographic MINMAX GP, LMGP (Ogryczak 1997);9. extended lexicographic GP, ELGP (Romero 2001).
GP formulations can be used to develop different plans withthe same preference information. These particular nine for-mulations were chosen because of their similarity of compo-sition and because they portray the range of measurementsprovided in Lp space (WGP measures L1 space, and MGPmeasures L? space) (Tamiz et al. 1998). The WGP, MGP,and EGP GP formulations directly use preference informa-tion as the target values, minimizing the unwanted devia-tions from the target value. The WIGP(K, K’), MIGP(K, K’),and EIGP(K, K’) GP formulations use the maximum for eachindicator as the target and associates a penalty function cor-responding to the preference information set by the indivi-dual DM. The lexicographic GP formulations (LGP, LMGP,and ELG) operate in a way similar to WGP, MGP, andEGP. The lexicographic approach groups require additionalinformation as to the priority of the target values. The prior-ity groups are the collection of indicators that the DM con-siders to be of equal importance, and compensation betweendifferent levels of priority groups is not allowed. Each ofthese formulations is described in detail in the followingparagraphs.
The solution derived from the WGP provides the maxi-mum aggregated achievement between the different goals,each weighted according to importance. The normal form ofthe achievement function (Ignizio 1976) needs to be alteredto accommodate multiple users who may provide preferenceinformation for different indicators.
Achievement function:
½1� min z ¼XT
t¼1
Xq
i¼1
ðaitnit þ bitpitÞXIit
Goals and constraints:
½2� fiðxÞ þ nit � pit ¼ bit; i 2 f1; . . . ; qg
½3� Iit 2 0; 1
½4� n � 0; p � 0
where T is the number of DMs participating in the decision-making process; q is the total number of indicators used; bitis the target value for the ith goal for the tth participant; Iitis a binary number dependant on whether the participanthas chosen to provide preference information on a particularindicator (0 if not chosen, 1 if chosen); nit and pit are nega-tive and positive deviations, respectively, from the target va-lue of the ith goal for the tth participant; ait = wit
+ki if nit isunwanted, otherwise ait = 0; bit = wit
–/ki if pit is unwanted,otherwise bit = 0; the parameter wit is the weight-reflectingpreference of a particular goal i for participant t; and ki isthe normalization weight attached to goal i. Adjusting theweights will shift the relative importance of a particular in-dicator (Tamiz et al. 1998). In this analysis, the importanceof the particular indicator is reflected through the particularthreshold level set by each DM.
The WGP formulation treats all deviations from the targetvalue in a consistent manner, and deviations that occur fur-ther from the target are penalized in a similar manner asthose occurring close to the target. Through the introductionof a penalty function, it is possible to treat marginal changesclose to the target value differently than the marginalchanges further away. In this particular case, one-half of aU-shaped penalty function is typical. For maximized indica-tor values, b will be 0, and for minimized indicator values,a will be 0 (Fig. 1).
An efficient way of incorporating the penalty functioninto the WGP achievement function is the WIGP(K, K’) pro-posed by Jones and Tamiz (1995). This has been modifiedto incorporate multiple DMs who may provide preferenceinformation for different indicators.
Achievement function:
½5� min z ¼XT
t¼1
Xq
i¼1
ait1hit1 þXk�1
j¼1
ðait;jþ1 � aitjÞhit;jþ1 þ bit1pit1 þXk 0�1
j¼1
ðbit;jþ1 � bitjÞpit;jþ1XIit
266664
377775
Fig. 1. Penalty function to (a) maximize and (b) minimize an indi-cator.
Eyvindson et al. 2401
Published by NRC Research Press
Can
. J. F
or. R
es. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y D
AL
HO
USI
E U
NIV
ER
on
06/1
0/14
For
pers
onal
use
onl
y.

Goals and constraints:
½6� fiðxÞ þ nit1 � pit1 ¼ dit1; i 2 f1; . . . ; qg...
½7� fiðxÞ þ nitk 0 � pitk 0 ¼ ditk 0 ; i 2 f1; . . . ; qg
½8� fiðxÞ þ hit1 � rit1 ¼ cit1; i 2 f1; . . . ; qg...
½9� fiðxÞ þ hitk � ritk ¼ citk; i 2 f1; . . . ; qg
½10� x 2 F; n � 0; p � 0; h � 0; r � 0
½11� citk < . . . cit1 < dit1 < . . . ditk 0
½12� ai;jþ1 > aij; bi;jþ1 > bij 8 j ðincreasing penalty caseÞ
½13� ai;jþ1 < aij; bi;jþ1 < bij 8 j ðdecreasing penalty caseÞ
where k and k’ describe the penalties associated with devia-tions above and below the threshold limit, respectively; hitand rit are negative and positive deviations, respectively,from the target value of the ith goal for the tth participant;cit and dit are the lower and upper target values, respectively,for the ith goal and the tth participant.
In this case, we are utilizing an increasing penalty case so
that the marginal penalty increases as the achievementmoves away from the goal. The increase of the penalty oc-curs by increasing the weight associated with a specific indi-cator with a specified constraint level (i.e., wik or wik’).
The MGP formulation minimizes the maximum level ofdeviation from the target for all of the indicators and, as aresult, seeks the most balanced solution (Flavell 1976). Thenormal MGP formulation needs to be modified to allow forthe preference information of multiple decision makers to beaggregated.
Achievement function:
½14� minXT
t¼1
Dt
Goals and constraints:
½15� ðaitnit þ bitpitÞ � Dt � 0
and subject to eqs. 2, 3, and 4. Dt is the maximum deviationaway from all of the targets i for participant t.
The MIGP(K, K’) introduces a penalty function in a simi-lar manner as with the WIGP(K, K’). The objective functionremains unchanged (eq.14), but the goals and constraints areadjusted (Vitoriano and Romero 1999).
Achievement function: same as eq.14Goals and constraints:
½16� ait1hit1 þXk�1
j¼1
ðait;jþ1 � aitjÞhit;jþ1 þ bit1pit1 þXk 0�1
j¼1
ðbit;jþ1 � bitjÞpit;jþ1
" #� Dt � 0
and subject to eqs. 6, 7, 8, 9, 10, 11, 12, and 13.The variables are all similar to those in the MGP, with the
addition of the subscripts j, k, and k’. These subscripts referto the different penalty functions incorporated into the for-mulation.
The EGP formulation, through the introduction of the pa-rameter l, combines the MGP and WGP formulations (Ro-mero 2001). The parameter l is a user-controlled parameterbelonging to [0, 1]. When l = 0, EGP is the same as MGP;when l = 1, EGP is the same as WGP. It represents a com-promise between the competing factors of these GP formula-tions. Although WGP obtains the maximum aggregatedachievement between the goals, MGP obtains the most equi-table solution between the goals.
Achievement function:
½17� minð1� lÞXT
t¼1
Dt þ lXT
t¼1
Xq
i¼1
ðaitnit þ bitpitÞXIit
Goals and constraints:
½18� l 2 ½0; 1�
and subject to eqs. 2, 3, 4, and 15.The EIGP(K, K’) formulation incorporates the concept of
penalty function to the EGP formulation (Vitoriano and Ro-mero 1999). The trade-off between the MIGP(K, K’) and theWIGP(K, K’) is combined through the use of the parameterl.
Achievement function:
½19� minð1� lÞXT
t¼1
Dt þ lXT
t¼1
Xq
i¼1
ait1hit1 þXk�1
j¼1
ðait;jþ1 � aitjÞhit;jþ1 þ bit1pit1 þXk 0�1
j¼1
ðbit;jþ1 � bitjÞpit;jþ1XIit
266664
377775
2402 Can. J. For. Res. Vol. 40, 2010
Published by NRC Research Press
Can
. J. F
or. R
es. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y D
AL
HO
USI
E U
NIV
ER
on
06/1
0/14
For
pers
onal
use
onl
y.

Goals and constraints: subject to eqs. 6, 7, 8, 9, 10, 11,12, 13, 16, and 18.
The lexicographic form of GP requires an absolute prefer-ence of one priority group above another (Ignizio 1976). Allof the lexicographic GP formulations are noncompensatory
in nature, so there are no finite trade-offs among the indica-tor values placed in different priority groups. So if all of theconstraints are met, the LGP method will maximize (or min-imize) the indicators in order of priority.
Achievement function:
½20� Lexðmin zÞ ¼XT
t¼1
Xi2h1
ðaitnit þ bitpitÞXIit
; . . . ;XT
t¼1
Xi2hr
ðaitnit þ bitpitÞXIit
; . . . ;XT
t¼1
Xi2hQ
ðaitnit þ bitpitÞXIit
24
35; r 2 f1; . . . ;Qg
Goals and Constraints: subject to eqs. 2, 3, and 4; hr rep-resents the index set of goals placed in the rth prioritygroup.
The LMGP formulation minimizes the maximum devia-tion between preference levels (Ogryczak 1997).
Achievement function:
½21� Lexðmin zÞ ¼XT
t¼1
Dt1; . . . ;XT
t¼1
Dtr; . . . ;XT
t¼1
DtQ
" #
Goals and Constraints: subject to eqs. 2, 3, 4, and
½22� ðaitnit þ bitpitÞ � Dt � 0; i 2 hr; r 2 f1; . . . ; Qg
The ELGP formulation integrates the LGP and LMGP for-mulations through the use of the l parameter (Romero2001).
Achievement function:
½23� Lexðmin zÞ ¼ ð1� l1ÞXT
t¼1
Dt1þl1
XT
t¼1
Xi2h1
ðaitnit þ bitpitÞXIit
; . . . ; ð1� lrÞXT
t¼1
Dtrþ"
lrXTt¼1
Xi2hr
ðaitnit þ bitpitÞXIit
; . . . ; ð1� lQÞXTt¼1
DtQ þ lQXTt¼1
Xi2hQ
ðaitnit þ bitpitÞXIit
�
Goals and constraints: subject to eqs. 2, 3, 4, 18, and 22.The achievement function of each of the different formu-
lations minimizes (or maximizes) different attributes. Thesolution derived from WGP provides the maximum aggre-gated achievement between the different goals. MGP mini-mizes the maximum deviation from any single goal. EGP isa combination of WGP and MGP and attempts to balancethe maximum aggregated achievement with the minimiza-tion of the maximum deviation from each goal. The lexico-graphic formulations allow trade-offs within priority groups,which occurs through the incorporation of WGP, MGP, orEGP. Romero (2004) has developed a general structure ofthe achievement function (extended lexicographic intervalGP, ELIGP(K, K’)) from which all nine of the objectivefunctions described earlier can be derived. Each GP formu-lation generates a unique alternative, optimized according tothe parameters of the particular formulation.
Stage 2 — phase 4: delivering the new plansWhen delivering the alternative plans it is important that
the consultant informs the DMs (in general terms) abouthow the new plans were developed to let them know thatall of their preferences were treated equally and that the al-ternatives generated are an aggregate of the preferences ofthe group. The DMs need to know that the alternatives beinggenerated are completely dependent on the preference infor-
mation of their peer DMs. If a compromise is required, animproved plan based on the preference information of theDMs should make reaching a decision easier.
Using the preference information and the different GPformulations, it is also possible to rank the initial plans(Diaz-Balteiro and Romero 2004). The ranking will showthe differences in general terms of how the goal program-ming formulations operate and will compare how closelythe plan relates to a given GP formulation. The ranking pro-vides a frame of reference between the initial forest plansand the newly developed plans. If the preference informa-tion from the DMs remains the same, there is no benefit forranking the newly developed plans with the same method, asthe ranking would always be similar (i.e., if the ranking usesthe MGP formulation as the base, then the ranking would beMGP, followed by EGP, and then WGP because EGP ismore closely related to both MGP and WGP than MGP isto WGP).
If it is not possible for the DMs to agree on which planwould be most appropriate, it could be possible to adjustthe preferences to accommodate the DMs either by usingMesta again or another decision support tool and then gener-ating new alternatives with the updated preference informa-tion. The DMs could modify their preferences in adownward fashion so that new alternatives could be createdthat may be more appropriate to all DMs. If none of theDMs wishes to modify their preference information, then it
Eyvindson et al. 2403
Published by NRC Research Press
Can
. J. F
or. R
es. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y D
AL
HO
USI
E U
NIV
ER
on
06/1
0/14
For
pers
onal
use
onl
y.

would be necessary to proceed by conducting appropriatenegotiations (Martins and Borges 2007).
Case study
Initial case study materialsThe forest holding used in this study was a 57.8 ha joint-
ownership forest in North Karelia, Finland (Eyvindson et al.2011) and is a fair representation of the typical holding inFinland. This holding had four owners: the primary forestowner, who was still living near the forest holding, and theother forest owners (the primary owner’s adult children),who were living in different municipalities throughout Fin-land up to 450 km from the holding. A forest inventory hadbeen compiled during 2008, and a 10-year forest plan wasdeveloped by the North Karelian Forestry Centre. In this in-ventory, it was found that the forest holding was composedmainly of Norway spruce (Picea abies (L.) Karst.) standswith fairly even age distributions. Figure 2 outlines the basicforest inventory characteristics.
Initial forest plans were prepared following brief tele-phone or email interviews of each of the forest owners. Theplanning horizon and periods chosen for the plans were se-lected to correspond to the current planning practices in Fin-land. The horizon for the plan was for 10 years with two 5-year periods. The interviews indicated that all of the forestowners wanted to conduct harvesting at a level less than themaximum sustainable harvest, and none of the forest ownerswas interested in increasing the income derived from for-estry activities. Seven forest plans were developed by Ey-vindson et al. (2011) using the forest simulation programMELA (Redsven et al. 2007) and were based on informationobtained from initial interviews of the forest owners. Theforest plans were developed according to the followingproblem formulations.
� Plan A. Only conduct the minimum cutting needed topromote good forestry practices; additional cutting willbe carried out only to offset the costs of forest manage-ment.
� Plan B. The only cuttings to be carried out are thinning;no regeneration cuttings are carried out; in the second 5-year period, the harvest is 75 m3/year more than in thefirst period.
� Plan C. Very little harvesting is done (175 m3/year) andcarried out evenly in both 5-year periods; in one stand,no forest management activities are conducted.
� Plan D. Harvesting is done at a sustainable level through-out the 10-year period (about 200 m3/year); in the future,the harvesting level can be increased.
� Plan E. This plan has more harvesting than plan D (about250 m3/year); in future periods, it is still possible toslightly increase the level of harvest.
� Plan F. Harvesting is done at a sustainable level duringthe 10-year period; the second 5-year period has 105 m3/year more cuttings than first period.
� Plan G. The maximum level of sustainable harvesting isconducted over the 10-year period; there are no harvest-ing operations done in one stand; in three stands, if har-vesting operations are done, at least 20% of the stands’timber stock would be left as retention or scenery trees.Values of different forest variables were calculated and
imported into a matrix to highlight the differences betweenthe different forest plans. In this analysis, the metrics werelimited to those variables that could be calculated by theMELA program. The variables included in this study arefound in the standard forest plan developed by the ForestryCentre. As a result, it was not possible to include variablessuch as biodiversity or potential for berry picking. It was as-sumed that the stand level constraints imposed on the forestplan would be able to compensate for this limitation.
The seven indicators to be used in the multicriteria evalu-ation of the plans with Mesta applications were as follows:
1. net income (in euros) for the first 5-year period, total in-come received from harvesting operations less costs re-lated to tending the forest;
2. net income (in euros) for the second 5-year period, total
Fig. 2. (a) Volume of log and pulp wood in a case study holding atthe beginning of the planning period; (b) diameter distribution at1.3 m height in a case study holding at the beginning of the plan-ning period; and (c) age-class distribution in a case study holdingat the beginning of the planning period.
2404 Can. J. For. Res. Vol. 40, 2010
Published by NRC Research Press
Can
. J. F
or. R
es. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y D
AL
HO
USI
E U
NIV
ER
on
06/1
0/14
For
pers
onal
use
onl
y.

income received from harvesting operations less costs re-lated to tending the forest;
3. regeneration cutting area (in hectares), the total area ofregeneration cutting (clear-cutting) during the 10-yearperiod;
4. total wood volume at the end of the 10-year period in2019 (in cubic metres), includes pulp and saw logs; thiscould be thought of as total future cutting opportunities;
5. mature forest area at the end of the 10-year period in2019 (in hectares), area of economically mature forests(over 80 years old); this increase can mean improve-ments to recreational activities and to the forest land-scape;
6. volume of broadleaved trees at the end of the 10-yearperiod in 2019 (in cubic metres), the existence of broad-leaved trees can add beauty to the forest landscape;
7. value of growing stock at the end of the 10-year periodin 2019 (in euros), this metric measures the change inwood value and indicates the future cutting possibilitiesof the forest.
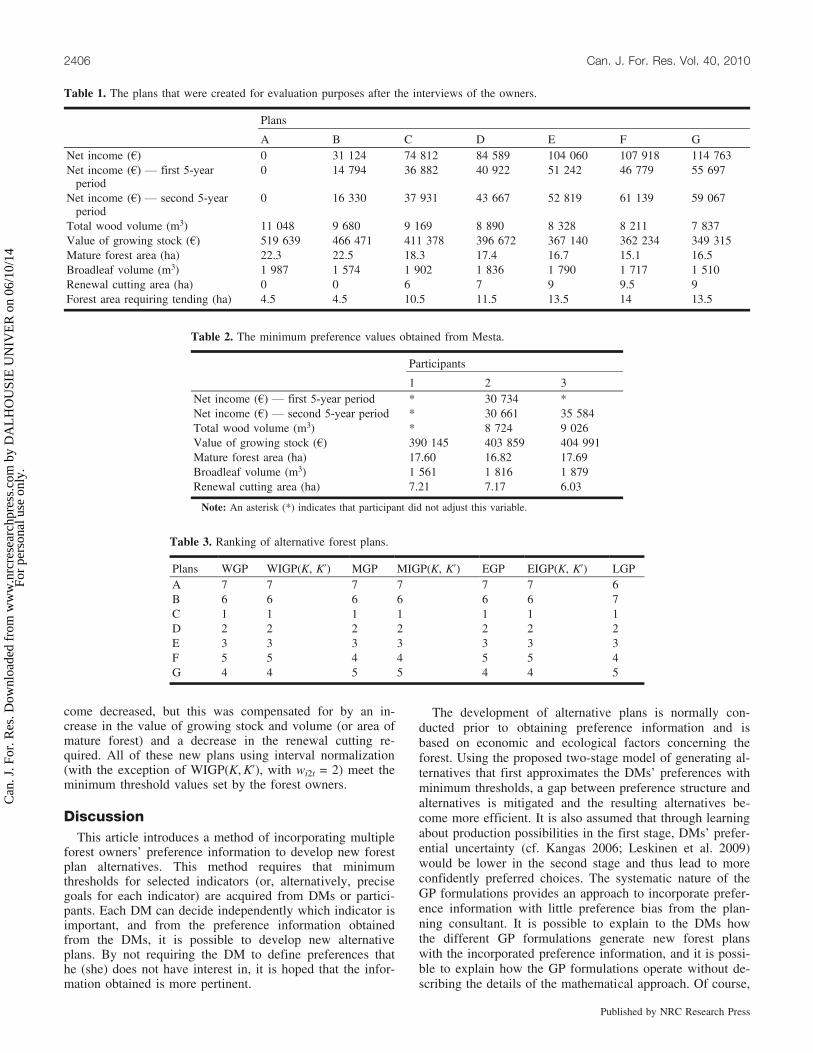
The indicator values in different plans can be seen in Ta-ble 1. These values were used as an input for the Mesta pro-gram, afterwhich it was possible for the forest owners to usethe Mesta program independently. To facilitate this process,the forest owners were provided with instructions on how touse the Mesta program, as well as a description of all of theforest plans.
All of the four forest owners attempted to use the Mestaprogram, and three were able to fill in all required informa-tion. One forest owner started to use the program but did notcomplete the process. Of the three forest owners who didcomplete the program, one forest owner provided preferenceinformation for all of the indicators, whereas the remainingtwo forest owners provided only partial preference informa-tion (Table 2).
Development of new forest plans using different GPformulations
If the participants’ preference information is similarenough, it may be possible for the forest owners to agree onan acceptable plan at this stage. This was the case for thisstudy, and plan C from Table 1 was delivered to the forestowners for their use, without any further negotiations or im-provements in this plan. This paper continues from thatpoint and uses the same data with the hopes of generatingeven more preferable forest plans.
Ranking the initial forest plans with the same GP formu-lations clearly shows that plan C dominates all other plans(Table 3) with respect to the preference information ob-tained. From this, it can be expected that all of the generatedalternatives will be closely related to plan C. In this case,the preference information between forest owners is quitesimilar, and as a result, there is only a small difference inthe rankings between any of the GP formulations.
The treatment schedules simulated earlier by the MELAprogram were used for creating new alternatives using dif-ferent GP formulations. Some reformatting of the data wasrequired to accommodate the J program (Lappi 2004) usedto solve the GP formulations. The J program solves amodel-I type of problem, which selects one (or a combina-tion of several) treatment schedule from among those simu-
lated for each stand (Lappi 2004). This means that thesuggested treatment for each stand can be examined simulta-neously with a holding-level solution. In total, 208 treatmentschedules were used for 46 compartments. Each GP formu-lation produced at least one new alternative forest plan (Ta-Tables 4 and 5), and the GP formulations that includedpenalty functions produced an alternate plan for each of thedifferent penalty functions.
Resulting new forest plansA total of 24 different forest plans were generated using
the nine different GP formulations. Half of the forest planswere created using ratio normalization, whereas the otherhalf were created using interval normalization. Ratio nor-malization scales the deviations from the target by dividingit by the maximum for the particular indicator. Interval nor-malization scales the deviation by dividing it by the differ-ence between the maximum and minimum preference of theindicator. In both cases, the maximum for the indicators aredetermined from the preliminary plans. Two different pen-alty functions (wi2t = 2 and wi2t = 5) were used withWIGP(K, K’), EIGP(K, K’), and MIGP(K, K’). For EGP,EIGP(K, K’) and ELGP, the value of l was set at 0.5 as ademonstration of how they combine their respectiveweighted and MINMAX GP formulations.
All but five of the plans met the minimum threshold lim-its for all of the participants. The plans that did not meet theminimum threshold limits were those that incorporated apenalty function (WIGP(K, K’), EIGP(K, K’), andMIGP(K, K’)). These GP formulations allow for deviationsbelow the minimum threshold limits as these formulationsallow for compensation. The compensation allowed is lim-ited by the weight value given to the formulations. As a re-sult, these formulations when using ratio normalization withwi2t = 2 (wi2t = 5 for WIGP(K, K’)) generated plans that al-lowed for small deviations below the threshold. The otherformulation that deviated from the minimum threshold limitswas WIGP(K, K’), when using interval normalization withwi2t = 2.
The lexicographic GP formulations require priority groupinformation that was not collected from the DMs. To illus-trate the GP formulations, priority groups were assigned bythe authors. Three different priority groups were used; thefirst group contained indicators 1 and 2, the second groupcontained indicators 3, 4, and 5, and the last group containedindicators 6 and 7. For ease of calculation, it was assumedthat the priority of each indicator is similar for all of theDMs.
The differences between plan C and the plans developedusing GP formulations are graphically represented by a per-formance profile comparing a selection of the generatedplans, minimum preference values, and plan C in Fig. 3.Creating an index that compares newly developed planswith either the preference information or the best predeter-mined plan is possible, but the values produced will focuson the intentional differences in the formulation used.Although all plans are rather similar to plan C, there aresome improvements, and the developed plans promote someof the indicators for which the participants indicated a pref-erence by giving it a higher minimum threshold limit. In allof the plans, both the first 5-year and second 5-year net in-
Eyvindson et al. 2405
Published by NRC Research Press
Can
. J. F
or. R
es. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y D
AL
HO
USI
E U
NIV
ER
on
06/1
0/14
For
pers
onal
use
onl
y.
come decreased, but this was compensated for by an in-crease in the value of growing stock and volume (or area ofmature forest) and a decrease in the renewal cutting re-quired. All of these new plans using interval normalization(with the exception of WIGP(K, K’), with wi2t = 2) meet theminimum threshold values set by the forest owners.
DiscussionThis article introduces a method of incorporating multiple
forest owners’ preference information to develop new forestplan alternatives. This method requires that minimumthresholds for selected indicators (or, alternatively, precisegoals for each indicator) are acquired from DMs or partici-pants. Each DM can decide independently which indicator isimportant, and from the preference information obtainedfrom the DMs, it is possible to develop new alternativeplans. By not requiring the DM to define preferences thathe (she) does not have interest in, it is hoped that the infor-mation obtained is more pertinent.
The development of alternative plans is normally con-ducted prior to obtaining preference information and isbased on economic and ecological factors concerning theforest. Using the proposed two-stage model of generating al-ternatives that first approximates the DMs’ preferences withminimum thresholds, a gap between preference structure andalternatives is mitigated and the resulting alternatives be-come more efficient. It is also assumed that through learningabout production possibilities in the first stage, DMs’ prefer-ential uncertainty (cf. Kangas 2006; Leskinen et al. 2009)would be lower in the second stage and thus lead to moreconfidently preferred choices. The systematic nature of theGP formulations provides an approach to incorporate prefer-ence information with little preference bias from the plan-ning consultant. It is possible to explain to the DMs howthe different GP formulations generate new forest planswith the incorporated preference information, and it is possi-ble to explain how the GP formulations operate without de-scribing the details of the mathematical approach. Of course,
Table 1. The plans that were created for evaluation purposes after the interviews of the owners.
Plans
A B C D E F GNet income (€) 0 31 124 74 812 84 589 104 060 107 918 114 763Net income (€) — first 5-yearperiod
0 14 794 36 882 40 922 51 242 46 779 55 697
Net income (€) — second 5-yearperiod
0 16 330 37 931 43 667 52 819 61 139 59 067
Total wood volume (m3) 11 048 9 680 9 169 8 890 8 328 8 211 7 837Value of growing stock (€) 519 639 466 471 411 378 396 672 367 140 362 234 349 315Mature forest area (ha) 22.3 22.5 18.3 17.4 16.7 15.1 16.5Broadleaf volume (m3) 1 987 1 574 1 902 1 836 1 790 1 717 1 510Renewal cutting area (ha) 0 0 6 7 9 9.5 9Forest area requiring tending (ha) 4.5 4.5 10.5 11.5 13.5 14 13.5
Table 2. The minimum preference values obtained from Mesta.
Participants
1 2 3Net income (€) — first 5-year period * 30 734 *Net income (€) — second 5-year period * 30 661 35 584Total wood volume (m3) * 8 724 9 026Value of growing stock (€) 390 145 403 859 404 991Mature forest area (ha) 17.60 16.82 17.69Broadleaf volume (m3) 1 561 1 816 1 879Renewal cutting area (ha) 7.21 7.17 6.03
Note: An asterisk (*) indicates that participant did not adjust this variable.
Table 3. Ranking of alternative forest plans.
Plans WGP WIGP(K, K’) MGP MIGP(K, K’) EGP EIGP(K, K’) LGPA 7 7 7 7 7 7 6B 6 6 6 6 6 6 7C 1 1 1 1 1 1 1D 2 2 2 2 2 2 2E 3 3 3 3 3 3 3F 5 5 4 4 5 5 4G 4 4 5 5 4 4 5
2406 Can. J. For. Res. Vol. 40, 2010
Published by NRC Research Press
Can
. J. F
or. R
es. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y D
AL
HO
USI
E U
NIV
ER
on
06/1
0/14
For
pers
onal
use
onl
y.

Table 4. Forest plans developed with GP formulations using ratio normalization.
Penalty function wi2t = 2 Penalty function wi2t = 5
WGP EGP MGP WIGP(K,K’) EIGP(K,K’) MIGP(K,K’) WIGP(K,K’) EIGP(K,K’) MIGP(K,K’) LGP ELGP LMGPIncome (€) — 5 year 32 798 32 798 30 734 30 734 34 433 36 738 30 734 32 417 35 560 33 860 33 860 34 456Income (€) — 10 year 35 584 35 584 35 584 36 757 37 798 40 328 35 584 35 584 39 034 35 584 35 584 35 584Total wood volume (m3) 9 183 9 183 9 026 9 026 8 912 8 837 9 026 9 026 9 026 9 113 9 113 9 054Value of growing stock (€) 417 699 417 699 418 468 418 486 411 240 404 991 418 863 417 148 410 719 415 084 415 084 413 437Mature forest area (ha) 17.69 17.69 17.69 20.29 19.83 19.25 20.13 19.9 19.05 17.69 17.69 17.69Broadleaf volume (m3) 1 879 1 879 1 887 1 838 1 839 1 845 1 877 1 879 1 879 1 879 1 879 1 879Renewal cutting area (ha) 4.80 4.80 4.94 2.20 2.66 3.24 2.36 2.59 3.44 4.97 4.97 5.05
Table 5. Forest plans developed with GP formulations using interval normalization.
Penalty function wi2t = 2 Penalty function wi2t = 5
WGP EGP MGP WIGP(K,K’) EIGP(K,K’) MIGP(K,K’) WIGP(K,K’) EIGP(K,K’) MIGP(K,K’) LGP ELGP LMGPIncome (€) — 5 year 32 798 32 798 36 402 30 734 33 554 36 122 30 734 33 554 36 122 33 860 33 860 32 798Income (€) — 10 year 35 584 35 584 35 584 34 044 35 584 37 239 35 584 35 584 37 239 35 584 35 584 35 584Total wood volume (m3) 9 182 9 182 9 026 9 243 9 144 9 226 9 211 9 144 9 226 9 113 9 113 9 150Value of growing stock (€) 417 699 417 699 411 032 424 625 418 180 414 313 422 555 418 180 414 313 415 084 415 084 416 820Mature forest area (ha) 17.69 17.69 17.69 20.12 19.67 18.05 19.97 19.67 18.05 17.69 17.69 17.69Broadleaf volume (m3) 1 879 1 879 1 879 1 879 1 879 1 879 1 879 1 879 1 879 1 879 1 879 1 879Renewal cutting area (ha) 4.8 4.8 4.97 2.49 2.94 4.76 2.63 2.94 4.76 4.97 4.97 4.97
Eyvindson
etal.
2407
Publishedby
NR
CR
esearchPress
Can
. J. F
or. R
es. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y D
AL
HO
USI
E U
NIV
ER
on
06/1
0/14
For
pers
onal
use
onl
y.

this calls for easy-to-use illustration tools for the decisionconsultants who work with forest owners.
To provide a manageable set of plans to the DMs, the setof plans should be as diverse as possible. One possibilitywould be to use WIGP(K,K’), EIGP(K,K’), and MIGP(K,K’)with a small penalty function (i.e., wi2t = 2) and the sameformulations with a higher penalty function (i.e., wi2t = 5),with interval normalization. This should provide enough al-ternatives (six) without becoming too overwhelming. TheGP formulations without a penalty function guide find forestplans that try to satisfy the preferences of all of the forestowners. Meanwhile, the penalty cases try to minimize thedistance away from the maximum value set for each indica-tor, and some compensation below the minimum threshold isallowed.
If the forest owners have provided information about pri-ority groupings, then lexicographic GP formulations couldalso be used instead of the penalty function GP formula-tions. The selection of priority groups has a dramatic effecton the development of new forest plans (due to its noncom-pensatory nature), and if this approach is used, a systemmust be implemented to ensure that each DM creates theirpriority grouping in an equitable way.
In GP, the issue of ensuring a nondominated solutionneeds to be considered. A solution is nondominated if thereis no alternative solution that can be found that has all crite-ria values equal to and at least one criterion better than theoriginal solution. If a target is set too low, there is a possi-bility that GP will generate a dominated solution. For LGP,
WGP, MGP, and EGP, it is possible that using the obtainedpreference information could find a dominated solution. Inthese situations, the consultant would need to discuss this is-sue with the DMs and acquire more detailed preference in-formation. This problem is not associated with the GPformulations with a penalty function (the a and b parame-ters), as the target for all of the objectives is set to maxi-mum and not a subjective target set by the DM.
In participatory planning situations, individual DMs mayattempt to strategically set their minimum threshold levelsin such a way as to influence the development of the alter-native plans. Each GP formulation responds to the influenceof strategic behaviour in different ways. The impact of bar-gained preferences on all of the GP formulations with alarge penalty function (i.e., wi2t = 5) will be the most appa-rent, whereas with a small penalty function (i.e., wi2t = 2),the impact will be rather limited. This is why it is importantto develop several plans using the same preference informa-tion. Then the participants need to agree collectively as towhich alternative plan is most acceptable. As such, it is un-likely that plans that are heavily influenced by strategic be-haviour would be accepted.
Although it is possible to use a variety of normalizationmethods, in this case, interval normalization is recom-mended. Interval normalization focuses the results on therange of alternatives within the preferences selected by theforest owners. Compensation below the minimum thresholdvalue is less likely. In addition, for some of the variables(such as volume), it is unreasonable to use a ratio scale, as
Fig. 3. Performance profile comparison between plan C, three newly generated plans, and the participants minimum preference values.
2408 Can. J. For. Res. Vol. 40, 2010
Published by NRC Research Press
Can
. J. F
or. R
es. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y D
AL
HO
USI
E U
NIV
ER
on
06/1
0/14
For
pers
onal
use
onl
y.

the absolute minimum value is rarely zero for both legal (inFinland, Forest Act 1996 (1093/1996), http://www.finlex.fi/en/laki/kaannokset/1996/en19961093.pdf) and practical rea-sons.
In this particular case, the weights attributed to the indi-vidual DM’s objective function were assumed to be equal.Different forest ownership scenarios could utilize a weightedsystem to accommodate different ownership proportions.The fairest method would be to assign a weight equal to theownership percentage of the forest. In this way, the prefer-ence of the owner with the largest portion of the forest mat-ters more than individuals with smaller portions.
This process relies upon information collected from otherplanning tools and needs to be flexible to incorporate thedifferent types of preference information available. Thiscase study utilized information obtained from Mesta, whichprovides the minimum acceptable threshold value for eachindicator. The GP formulations are flexible and can beadapted to many different types of preference information.For instance, preference information with respect to targetlevels could be obtained from a reference plan (e.g., currentcourse of actions continue) in which the DM would be askedto modify some indicators to a level that more accuratelyrepresents the DMs’ preferences.
One suggestion received when conducting the case studywas a desire to view the other forest owners’ preference in-formation (Eyvindson et al. 2011). The reasoning behind thesuggestion was to provide a social reference of the group ingeneral. The MIGP(K, K’) formulation could be used as a so-cial reference so that the participants could compare theirown preferences with the preference of the group in general.The forest plan generated with MIGP(K, K’) will show eachparticipant which indicator is limiting the process and wherecompromises will be required to find an acceptable alterna-tive. In this way, the exact preferences of the individual for-est owners remain unspecified. This allows individuals tokeep their preference information anonymous.
Goal programming formulations have several concernsand limitations that will influence the generation of new for-est plans. The choice of normalization used, the preferenceinformation obtained, and the selection of a penalty functionwill affect the outcome derived by the different GP formula-tions. These variables can be determined prior to the imple-mentation of the GP formulations, and as such, carefulconsideration should be made in their selection. In this par-ticular case, two penalty functions were used, and both inter-val normalization and ratio normalization were used togenerate new forest plans. For the three extended GP formu-lations (EGP, EIGP(K, K’), and ELGP), the variable l couldbe adjusted to reflect the interest of the DMs. If the differ-ence between WGP and MGP is great, then adjusting l
could produce a range of alternative plans that are a com-promise between the formulations.
In this case study, the preference information obtainedfrom the participants was rather similar. This is probablyatypical for participatory planning situations. When dealingwith participants who have diametrically opposed values, anew alternative plan will still be developed for each GP for-mulation because of higher (or lower) aspiration levels andnot utilizing concrete cutoff values of acceptability (Chang2007). The resulting plans would be a compromise and
would likely not be preferable to either party. These com-promise plans could be considered as a range of what couldbe considered ‘‘fair’’. For these types of problems, thechoice of a particular penalty function will have a large im-pact on the alternative plans created.
In the past, the choice of indicators selected for use in theGP formulations has been made typically by the planner.These selected indicators may influence the final selectedplan, and different DMs may want to analyse a different se-lection of indicators. If the DMs were to select indicators in-dependently, the problem of framing could be avoided;however, this would increase the time required for this proc-ess. A study should be done to analyse what might be appro-priate default indicators for different subpopulations ofDMs.
Another area of future research could be the developmentof an index that could rank the relative improvement ofnewly generated plans. This paper conducts the comparisonvisually through a performance profile graph; however,some DMs might find it beneficial to use a more concretevalue to measure the relative improvement of the plans. Theaccuracy of such an index could be impeded through inaccu-rate or uncertain preference information and through differ-ences in the relative importance of the criteria for each DM.
This process could prove useful in a wide variety of own-ership types, in both single- and multiple-ownership cases.In the single-owner scenario, this tool could be useful in fo-cusing the forest plan towards what the forest owner desiresfrom his (her) forest. In multiple-owner scenarios, the toolwould be able to provide a range of the forest plans to bal-ance the compromises required between the different forestowners. The only information required by this method isthe minimum threshold levels at which the DMs would besatisfied, and only for the indicators that are important tothe participant. If more precise preference information isavailable, then it would be possible to generate alternativeplans that more precisely match the desires of the DMs. Forfurther development to continue, empirical testing needs tobe conducted so that the usefulness of the tools can be eval-uated in different cases.
AcknowledgementsThe authors thank two anonymous reviewers and the Edi-
tors for their comments. This study was supported by theAcademy of Finland (decision number 127681).
ReferencesAnanda, J., and Herath, G. 2009. A critical review of multi-criteria
decision making methods with special reference to forest man-agement and planning. Ecol. Econ. 68(10): 2535–2548. doi:10.1016/j.ecolecon.2009.05.010.
Belton, V., and Pictet, J. 1997. A framework for group decision usinga MCDA model: sharing, aggregating or comparing individual in-formation? Revue des systemes de decision, 6(3): 283–303.
Belton, V., and Stewart, T.J. 1999. DEA and MCDA: competing orcomplementary approaches? In Advances in decision analysis.Edited by N. Meskens and M. Rouben. Kluwer Academic Pub-lishers, Dordrecht, the Netherlands. pp. 87-104.
Belton, V., and Stewart, T.J. 2002. Multiple criteria decision analy-sis — an integrated approach. Kluwer Academic Publishers,Dordrecht, the Netherlands.
Eyvindson et al. 2409
Published by NRC Research Press
Can
. J. F
or. R
es. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y D
AL
HO
USI
E U
NIV
ER
on
06/1
0/14
For
pers
onal
use
onl
y.

Bertomeu, M., Diaz-Balteiro, L., and Gimenez, J.C. 2009. Forestmanagement optimization in Eucalyptus plantations: a goal pro-gramming approach. Can. J. For. Res. 39(2): 356–366. doi:10.1139/X08-173.
Beynon, M.J. 2006. The role of the DS/AHP in identifying inter-group alliances and majority rule within group decision making.Group Decis. Negot. 15(1): 21–42. doi:10.1007/s10726-005-1159-9.
Chang, C.T. 2007. Multi-choice goal programming. Omega, 35(4):389–396. doi:10.1016/j.omega.2005.07.009.
Diaz-Balteiro, L., and Romero, C. 2004. Sustainability of forestmanagement plans: a discrete goal programming approach. J.Environ. Manage. 71(4): 351–359. doi:10.1016/j.jenvman.2004.04.001. PMID:15217723.
Diaz-Balteiro, L., and Romero, C. 2008. Making forestry decisionswith multiple criteria: a review and an assessment. For. Ecol.Manage. 255(8–9): 3222–3241. doi:10.1016/j.foreco.2008.01.038.
Eyvindson, K., Kurttila, M., Hujala, T., and Salminen, O. 2011. Aninternet-supported planning approach for joint ownership forestholdings. Small-scale For. doi: 10.1007/s11842-010-9123-1. Inpress.
Field, D.B. 1973. Goal programming for forest management. For.Sci. 19: 125–135.
Field, R.C., Dress, P.E., and Fortson, J.C. 1980. Complementarylinear and goal programming procedures for timber harvestscheduling. For. Sci. 26(1): 121–133.
Flavell, R.B. 1976. A new goal programming formulation. Omega,4(6): 731–732. doi:10.1016/0305-0483(76)90099-2.
Gomez, T., Hernandez, M., Leon, M.A., and Caballero, R. 2006. Aforest planning problem solved via a linear fractional goal pro-gramming model. For. Ecol. Manage. 227(1–2): 79–88. doi:10.1016/j.foreco.2006.02.012.
Hiltunen, V., Kurttila, M., Leskinen, P., Pasanen, K., and Pykalai-nen, J. 2009. Mesta: an internet-based decision-support applica-tion for participatory strategic-level natural resources planning.For. Policy Econ. 11(1): 1–9. doi:10.1016/j.forpol.2008.07.004.
Hotvedt, J.E. 1983. Application of linear goal programming to for-est harvest scheduling. Southern J. Agric. Econ. 15(1): 103–108.
Ignizio, J.P. 1976. Goal programming and extensions. LexingtonBooks, Lexington, Massachusetts.
Jones, D.F., and Tamiz, M. 1995. Expanding the flexibility of goalprogramming via preference modelling techniques. Omega,23(1): 41–48. doi:10.1016/0305-0483(94)00056-G.
Kangas, A. 2006. The risk of decision making with incomplete cri-teria weight information. Can. J. For. Res. 36(1): 195–205.doi:10.1139/x05-243.
Kangas, J., and Kangas, A. 2005. Multiple criteria decision supportin forest management — the approach, methods applied, and ex-periences gained. For. Ecol. Manage. 207(1–2): 133–143.doi:10.1016/j.foreco.2004.10.023.
Kangas, J., and Pukkala, T. 1992. A decision theoretic approachapplied to goal programming of forest management. Silva Fenn.26: 169–179.
Kangas, A., Kangas, J., and Kurttila, M. 2008. Decision support forforest management. In Managing forest ecosystems. Vol. 16.Springer, New York.
Kangas, A., Saarinen, N., Saarikoski, H., Leskinen, L.A., Hujala,T., and Tikkanen, J. 2010. Stakeholder perspectives about properparticipation for Regional Forest Programmes in Finland. For.Policy Econ. 12(3): 213–222.
Lappi, J. 2004. J user’s guide. Ver. 0. 9.4. Finnish Forest ResearchInstitute, Suonenjoki Research Station, FIN-77600, Suonenjoki,Finland.
Laukkanen, S., Palander, T., and Kangas, J. 2004. Applying votingtheory in participatory decision support for sustainable timberharvesting. Can. J. For. Res. 34(7): 1511–1524. doi:10.1139/x04-044.
Leskinen, P., Pykalainen, J., and Haara, A. 2009. Incorporation ofpreferential uncertainty into interval-scale priority functions —a case of multicriteria forestry decision making. Can. J. For.Res. 39(8): 1498–1506. doi:10.1139/X09-055.
Martins, H., and Borges, J.G. 2007. Addressing collaborative plan-ning methods and tools in forest management. For. Ecol. Man-age. 248(1–2): 107–118. doi:10.1016/j.foreco.2007.02.039.
Mendoza, G. 1986. A heuristic programming approach in estimat-ing efficient target levels in goal programming. Can. J. For.Res. 16(2): 363–366. doi:10.1139/x86-062.
Mendoza, G.A., and Martins, H. 2006. Multi-criteria decision ana-lysis in natural resource management: a critical review of meth-ods and new modelling paradigms. For. Ecol. Manage. 230(1–3): 1–22. doi:10.1016/j.foreco.2006.03.023.
Nordstrom, E.-M., Romero, C., Eriksson, L.O., and Ohman, K.2009. Aggregation of preferences in participatory forest plan-ning with multiple criteria: an application to the urban forest inLycksele, Sweden. Can. J. For. Res. 39(10): 1979–1992. doi:10.1139/X09-107.
Ogryczak, W. 1997. Preemptive reference point method. In Multi-criteria analysis. Edited by J. Climacao. Springer-Verlag, NewYork. pp. 156–167.
Pykalainen, J., and Kurttila, M. 2009. Interactive method for sup-porting forest owners in biodiversity protection decisions.Small-scale For. 8(3): 337–348. doi:10.1007/s11842-009-9087-1.
Pykalainen, J., Hiltunen, V., and Leskinen, P. 2007. Complemen-tary use of voting methods and interactive utility analysis in par-ticipatory strategic forest planning: experiences gained fromwestern Finland. Can. J. For. Res. 37(5): 853–865. doi:10.1139/X06-241.
Redsven, V., Hirvela, H., Harkonen, K., Salminen, O., and Siito-nen, M. 2007. MELA2007 reference manual. The Finnish ForestResearch Institute, Jokiniemenkuja 1, Box 18, FI-01301 Vantaa,Finland.
Romero, C. 2001. Extended lexicographic goal programming: aunifying approach. Omega, 29(1): 63–71. doi:10.1016/S0305-0483(00)00026-8.
Romero, C. 2004. A general structure of achievement function fora goal programming model. Eur. J. Oper. Res. 153(3): 675–686.doi:10.1016/S0377-2217(02)00793-2.
Scniederjans, M.J. 1995. Goal programming methodology and ap-plications. Kluwer Publishers, Boston, Massachusetts.
Sheppard, S.R.J. 2005. Participatory decision support for sustain-able forest management: a framework for planning with localcommunities at the landscape level in Canada. Can. J. For. Res.35(7): 1515–1526. doi:10.1139/x05-084.
Sheppard, S.R.J., and Meitner, M. 2005. Using multi-criteria analy-sis and visualisation for sustainable forest management planningwith stakeholder groups. For. Ecol. Manage. 207(1–2): 171–187.doi:10.1016/j.foreco.2004.10.032.
Tamiz, M., Jones, D., and Romero, C. 1998. Goal programming fordecision making: an overview of the current state-of-the-art.Eur. J. Oper. Res. 111(3): 569–581. doi:10.1016/S0377-2217(97)00317-2.
Vitoriano, B., and Romero, C. 1999. Extended interval goal pro-gramming. J. Oper. Res. Soc. 50(12): 1280–1283.
Walker, H.D. 1985. An alternative approach to goal programming.Can. J. For. Res. 15(2): 319–325. doi:10.1139/x85-052.
2410 Can. J. For. Res. Vol. 40, 2010
Published by NRC Research Press
Can
. J. F
or. R
es. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y D
AL
HO
USI
E U
NIV
ER
on
06/1
0/14
For
pers
onal
use
onl
y.