variable elimination and conditioning: complexity forecasts
TRANSCRIPT

1
CS3710 Advanced Topics in AI, Lecture 6
Variable Elimination and Conditioning: Complexity Forecasts.
Collin [email protected]
Milos [email protected]
9/19/2005
Outline
Recap. Factor-Based Elimination. Moral Graphs and Triangulation. Variable Elimination. Induced Graph. Correspondence with Tree Decomposition. Initial Conclusions. Conditioning. Final Conclusions.

2
Recap (Problem).
Coherence
Difficulty Intelligence
Grade SAT
Letter
Job
Happy
Recap (Variable Elimination)
)(
),(
),,(),,(
),(),(),(),,(...
)(),,(),,(),(),(),,()(
),()(),,(),,(),(),(),,()(
),,(),,(),(),(),,(),()()()(
,
,
,,,,,
,,,,,
,,,,,,
j
jl
jslslj
jggsglslj
cjghsljglisdigi
cdcjghsljglisdigi
jghsljglisdigcdicJp
I
IS
GIS
DIHGSL
CDIHGSL
CDIHGSL
τ
τ
τφ
ττφφ
τφφφφφφ
φφφφφφφφ
φφφφφφφφ
=
=
=
=
=
=
=
∑
∑
∑∑
∑
∑∑
∑
Coherence
Difficulty
Intelligence
Grade SAT
Letter
Job
Happy

3
Basic messages
Variable Elimination is not determininistic. The order of elimination governs the overall
efficiency. Finding an optimal ordering is difficult. While different methodologies exist they are all
functionally identical. The cost of any ordering is exponential in the
number of variables that appear in the largest factor.
Factor-Based Elimination.
)(
),(
),,(),,(
),(),(),(),,(...
)(),,(),,(),(),(),,()(
),()(),,(),,(),(),(),,()(
),,(),,(),(),(),,(),()()()(
,
,
,,,,,
,,,,,
,,,,,,
j
jl
jslslj
jggsglslj
cjghsljglisdigi
cdcjghsljglisdigi
jghsljglisdigcdicJp
I
IS
GIS
DIHGSL
CDIHGSL
CDIHGSL
τ
τ
τφ
ττφφ
τφφφφφφ
φφφφφφφφ
φφφφφφφφ
=
=
=
=
=
=
=
∑
∑
∑∑
∑
∑∑
∑

4
FBE: Trace
FBE: Trace
2L7
3S6
4G5
3H4
3I3
3D2
2C1
ComplexityNew FactorFactors UsedVarStep
),(),,(),,(
),(),(),(),,(
),(),()()(),,(
),()(
6
5
34
2
1
LJSLJSLJ
GLSGJGJGH
IGISIDDIG
CDC
J
L
H
SI
G
DC
τφτ
φττφ
τφφτφ
φφ
)(),(),,(
),(),(),(
)(
7
6
5
4
3
2
1
JLJSLJ
JGSGIG
D
τττττττ

5
Factor-based elimination Ordering Ω:
– A permutation of variables for elimination.
Factor Φ(X,Y) ℜ:– A function mapping some set of variables to a real
value.
scope[Φ]: – The set of variables represented in the factor.
width[Ω] : – The scope of the largest factor produced by Ω.
FBE: Steps
• FBE consists of a series of elimination steps.
• Each step is as follows:– Select a variable X from the set of variables remaining.– Multiply all factors τ where X ∈scope[τ] to produce a
new factor ψ. – Sum X out of ψ to produce a new factor τ whose scope is ψ minus X.
• Repeat until a single factor τ(Y) remains where Y is the target variable of our inference.

6
Complexity
• The complexity of each elimination step is:– Where:
• The complexity of the algorithm for a given ordering Ω is:– Where:
• n is the initial number of factors in the graph.• .
|)(|
...1
ii
ki
scopeNi
ψ
φφψ
=
××=
)( iikNO
][max Ω= widthN
)( maxnNO
FBE: Trace

7
FBE: Trace.
2L73S64G53H43I33D22C1
ComplexityNew FactorFactors UsedVarStep
),(),,(),,(
),(),(),(),,(
),(),()()(),,(
),()(
6
5
34
2
1
LJSLJSLJ
GLSGJGJGH
IGISIDDIG
CDC
J
L
H
SI
G
DC
τφτ
φττφ
τφφτφ
φφ
)(),(
),,(),(),(),(
)(
7
6
5
4
3
2
1
JLJ
SLJJGSGIG
D
ττ
τττττ
Total cost:
)32()48()(4][
max OOnNOwidth
=×==Ω
Ordering 2
8
FBE: Trace.
2L7
3S6
3G5
4H4
5I3
6D2
6C1
ComplexityNew FactorFactors UsedVarStep
),(),(),(
),,(),,,(
),,,,(),,(),,,,(),()(),,(),(),,(
6
5
4
3
2
1
JDCDJD
HJDHJLD
HJSLDSLJHJLDIISI
JGHGLDIG
D
J
SI
HLG
τφτ
ττ
τφτφφ
φφφ
)(),(),(),,(),,,(),,,,(),,,,(
7
6
5
4
3
2
1
JJDJDHJDHJLDHJSLDHJLDI
τττττττ
Total cost:
)48()68()(6][
max OOnNOwidth
=×==Ω
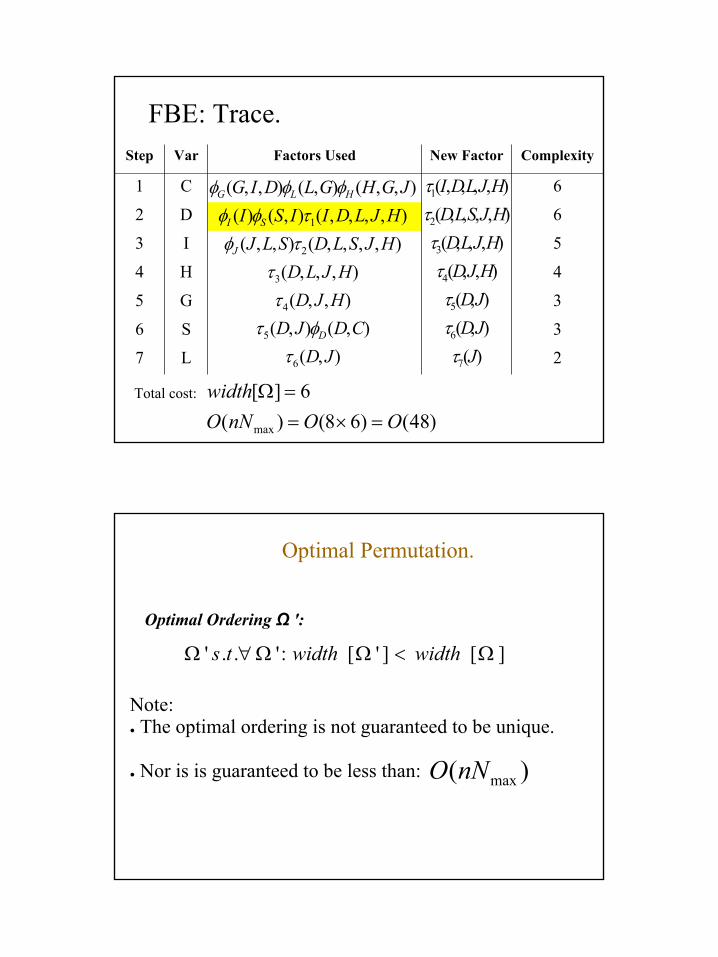
Optimal Permutation.
Optimal Ordering Ω ':
Note: The optimal ordering is not guaranteed to be unique.
Nor is is guaranteed to be less than:
][]'[:'..' Ω<ΩΩ∀Ω widthwidthts
)( maxnNO

9
Moral Graphs
Moral-graph H[G]: of a bayesian network over X is an undirected graph over X that contains an edge between x and y if:
There exists a directed edge between them in G.
They are both parents of the same node in G.
C
D I
G S
L
JH
C
D I
G S
L
JH
Moral Graphs
Why moralization?
),,(),,(),(),(),,(),()(),|(),|()|()|(),|()|()(
),,,,,,,(
7654321 JGHSLJGLISDIGCDCJGHPSLJPGLPISPDIGPCDPCP
HJLSIGDCP
φφφφφφφ==
=
),|( DIGP ),,(3 DIGφC
D I
G S
L
JH
C
D I
G S
L
JH

10
Variable Elimination
The variable elimination algorithm is based only on the scope of each factor.
Factors are distilled from the graph representation.
Variable Elimination can therefore be viewed as a graph algorithm.
C
D I
G S
L
JH
VE: Trace (1)
(1)
∑=C
CDD ),()( φτ
a) Multiply the factors to produce:
b) Sum over C to produce:
)()(),( CDCD φφφ ×=
(2)
∑=D
GIDIG ),,(),(2 φτ
a) Multiply the factors to produce:
b) Sum over D to produce:
)(),,(),,( 1 DDIGGID τφφ ×=
S
C
D I
G
L
JH
C
D I
G
L
JH
S

11
VE: Trace (2)
(3)
∑=I
SGISG ),,(),(3 φτ
a) Multiply the factors to produce:
b) Sum over I to produce:
),(),()(),,( 2 IGISISGI τφφφ ××=
(4)
∑=H
JGHJG ),,(),(4 φτ
a) Multiply the factors to produce:
b) Sum over I to produce:
),,(),,( JGHJGH φφ =S
C
D I
G
L
JH
S
C
D I
G
L
JH
VE: Trace (3)
(5)
∑=G
SLJGSLJ ),,,(),,(5 φτ
a) Multiply the factors to produce:
b) Sum over I to produce:
),(),(),(),,,( 34 GLSGJGSLJG φττφ ××=
(6)
∑=S
SLJLJ ),,(),(6 φτ
a) Multiply the factors to produce:
b) Sum over I to produce:
),,(),,(),,( 5 SLJSLJSLJ φτφ ×=
S
C
D I
G
L
JH
S
C
D I
G
L
JH

12
VE: Trace (4)
(5)
∑=L
LJJ ),()(7 φτ
a) Multiply the factors to produce:
b) Sum over I to produce:
),(),( 6 LJLJ τφ =S
C
D I
G
L
JH
Variable elimination: Induced Graph
Induced Graph G': An undirected graph over X where y and z are connected if they both appear in some intermediate elimination factor of Ω.
Every factor generated during Ω appears as a subclique of the graph.
S
C
D I
G
L
JH

13
Variable elimination: Induced Graph Induced Graph G': An
undirected graph over X where y and z are connected if they both appear in some intermediate elimination factor of Ω.
Every factor generated during Ω appears as a subclique of the graph.
The size of the largest clique governs the computation.
S
C
D I
G
L
JH
CorrespondenceB C
D E
F
HA G
Tree-Width = best Max Factor-Width -1 = best Max Clique-Size -1
the tree-width defined by transformation of the undirected graph to the best factor tree is the same
0.4c2b2
0.3c1b2
0.6c2b1
0.1c1b1
0.4b2a3
0.2b1a3
0.3b2a2
0.1b1a2
0.2b2a1
0.5b1a1
c2c1c2c1c2c1c2c1c2c1c2c1
0.4*0.4
b2a30.4*0.
3b2a3
0.2*0.6
b1a30.2*0.
1b1a3
0.3*0.4
b2a20.3*0.
3b2a2
0.1*0.6
b1a20.1*0.
1b1a2
0.2*0.4
b2a10.2*0.
3b2a1
0.5*0.6
b1a10.5*0.
1b1a1
=.S
C
D I
G
L
JH

14
Induced Graph to Tree Decomposition
S
C
D I
G
L
JH
C,D
D,I,G G,I,S
G,S,L,J
H,G,J
For each Clique in the induced graph:– Collapse the clique into a compound factor node
containing the member variables.– Draw a link between each pair of nodes that share a
member variable.
The Bad News
Deciding whether or not there exists an ordering Ω s.t. Width(Ω) < N is NP-Hard.– No matter what method is used.
At best the inference is still exponential in the treewidth of the factor graph

15
Chordal graphs and Triangulations
Chordal Graph: an undirected graph G whose minimum cycle contains 3 verticies.
C
D I
G S
L
JH
C
D I
G S
L
JH
Chordal. Not Chordal.
Triangulation The process of converting a graph G into a chordal
graph is called Triangulation.
The induced graph is:1) Guaranteed to be chordal.2) Not guaranteed to be optimal.
There exist exact algorithms for minimal chordalgraphs, and heuristic methods with a guaranteed upper bound.

16
Chordal Graphs: Good News If the moralized graph of our original network is chordal:
– There exists an elimination ordering that adds no edges.– The minimal induced width of the graph is the size of the
largest clique - 1.
C
D IG S
LJ
H
C
D IG S
LJ
H
C
D IG S
LJ
H
C
D IG S
LJ
H
Chordal Graphs: Bad News Given a minimum triangulation for a graph G, we can
carry out the variable-elimination algorithm in the minimum possible time.
However, finding the minimal triangulation is NP-Hard.– Time is exponential in terms of the largest clique
(factor) in G.

17
Initial Conclusions We cannot escape exponential costs in the treewidth.
But in many graphs the treewidth is much smaller than the total number of variables
Still a problem: Finding the optimal decomposition is hard– But, paying the cost up front may be worth it.– Triangulate once, query many times. – Real cost savings if not a bounded one.
Conditioning Up until now we have ignored some independences
Assume the Student network from Koller and Friedman
∑
∑∑
∑
∑
===
========
========
=======
i
lsgdci
lsgidc
lsgidc
iIJPiIP
iIJlLsSgGdDcCPiIP
iIJlLsSgGdDcCPiIP
JlLsSgGiIdDcCPJP
)|()(
)|,,,,,()(
)|,,,,,()(
),,,,,,()(
,,,,
,,,,,
,,,,,
C
D IG S
LJ
C
D IG S
LJ
C
D
G S
LJ
I

18
ConditioningConcept:
– Fix some variable I s.t. I=i and remove it from the graph.– Recalculate neighboring probabilities.– Execute VE with the reduced graph.
C
D IG S
LJ
C
D IG S
LJ •We need to do a separate inference for
every value i of I•But the structure of the network is muchsimpler
ConditioningGeneral conditioning works for sets of variables.
Assume:
C
D I
G
SL
JU
ZK
C
D I
G
SL
JU
ZK
C
D I
G
SL
JU
ZK

19
Conditioning conclusions Conditioning on some variables may simplify the
structure of the remaining network– The network may break into small pieces.
Variable elimination may be easier to perform on the new network