vertical versus horizontal poincare inequalities...vertical versus horizontal poincare inequalities...
TRANSCRIPT

Vertical Versus Horizontal Poincare Inequalities
Assaf Naor
Courant Institute
TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: AAAAAAAAAAAAAA

Bi-Lipschitz distortion
a metric space and a Banach space.
the infimum over those for which there exists satisfying
(M;dM) (X;k ¢ kX)
cX(M) = D 2 (1;1]
f :M !X
MD,¡!X:
8 x; y 2M; dM(x; y) 6 kf(x)¡ f(y)kX 6DdM(x; y):

The discrete Heisenberg group
• The group generated by subject to the relation stating that the commutator of is in the center:
where
H a; ba; b
ac= ca and bc= cb
c = [a; b] = aba¡1b¡1

Concretely,
H =
8<:
0@1 x z
0 1 y
0 0 1
1A : x; y; z 2 Z
9=;
a =
0@1 1 0
0 1 0
0 0 1
1A and b =
0@1 0 0
0 1 1
0 0 1
1A
c =
0@1 0 1
0 1 0
0 0 1
1A

The left-invariant word metric on corresponding to the generating set is denoted .
fa; a¡1; b; b¡1gH
dW


Denote
Basic facts:
8n 2 N; Bn = fx 2H : dW(x; eH) 6 ng
8k 2 N; dW(ck; eH) ³pk
8m 2 N; jBmj ³m4

Uniform convexity
The modulus of uniform convexity of :
±X(²) = inf
½1¡
°°°°x+ y
2
°°°°X
: kxkX = kykX = 1; kx¡ ykX = ²
¾(X;k ¢ kX)
PnX
i=1
Pn
i=1bkblblRR 10f(x)dx
Pn
i=1
Pn
i=1
Pn
i=1
x
y0
x+y
2
²
1¡°°x¡y
2
°°X¸ ±X(²)

• X is uniformly convex if
• For , X is q-convex if it admits an equivalent norm with respect to which
Theorem (Pisier, 1975). If X is uniformly convex then it is q-convex for some .
is -convex for .
8 ² 2 (0;1); ±X(²) > 0:
q 2 [2;1)
±X(²) & ²q:
q 2 [2;1)
`p maxf2; pg p > 1

Mostow (1973), Pansu (1989), Semmes (1996)
Theorem. The metric space does not admit a bi-Lipschitz embedding into for any .
(H; dW )
Rn n 2 N

Assouad’s embedding theorem (1983)
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)

Assouad’s embedding theorem (1983)
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)

Assouad’s embedding theorem (1983)
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)

Assouad’s embedding theorem (1983)
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)

Assouad’s embedding theorem (1983)
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)

Assouad’s embedding theorem (1983)
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)

Assouad’s embedding theorem (1983)
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)

Assouad’s embedding theorem (1983)
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)

Assouad’s embedding theorem (1983)
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)

Assouad’s embedding theorem (1983)
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)

Assouad’s embedding theorem (1983)
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)
Assouad’s embedding theorem (1983)
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)

Assouad’s embedding theorem (1983)
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)

Assouad’s embedding theorem (1983)
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)

Assouad’s embedding theorem (1983)
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)

Assouad’s embedding theorem (1983)
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)

Assouad’s embedding theorem
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)

Assouad’s embedding theorem
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)

Assouad’s embedding theorem (1983)
• A metric space is K-doubling if any ball can be covered by K-balls of half its radius.
(M;dM)

Theorem (Assouad, 1983). Suppose that is K-doubling and . Then
Theorem (N.-Neiman, 2010). In fact
David-Snipes, 2013: Simpler deterministic proof.
(M;dM)
² 2 (0;1)
(M;d1¡²M )D(K;²),¡¡¡¡! RN(K;²):
(M;d1¡²M )D(K;²),¡¡¡¡! RN(K):

Obvious question: Why do we need to raise the metric to the power ?
1¡ ²
(M;d1¡²M )D(K;²),¡¡¡¡! RN(K;²):

Obvious question: Why do we need to raise the metric to the power ?
Since in we have
the metric space is O(1)-doubling.
By Mostow-Pansu-Semmes,
1¡ ²
(M;d1¡²M )D(K;²),¡¡¡¡! RN(K;²):
8m 2 N; jBmj ³m4;(H; dW )
(H; dW )
(H; dW) 6,! RN :

Proof of non-embeddability into
By a limiting argument and a non-commutative variant of Rademacher’s theorem on the almost-everywhere differentiability of Lipschitz functions (Pansu differentiation) we have the statement
“If the Heisenberg group embeds bi-Lipschitzly into then it also embeds into via a bi-Lipschitz mapping that is a group homomorphism.”
A non-Abelian group cannot be isomorphic to a subgroup of an Abelian group!
Rn
Rn Rn

Heisenberg non-embeddability
• Mostow-Pansu-Semmes (1996).
• Cheeger (1999).
• Pauls (2001).
• Lee-N. (2006).
• Cheeger-Kleiner (2006).
• Cheeger-Kleiner (2007).
• Cheeger-Kleiner (2008).
• Cheeger-Kleiner-N. (2009).
• Austin-N.-Tessera (2010).
• Li (2013).

Heisenberg non-embeddability
• Mostow-Pansu-Semmes (1996).
• Cheeger (1999).
• Pauls (2001).
• Lee-N. (2006).
• Cheeger-Kleiner (2006).
• Cheeger-Kleiner (2007).
• Cheeger-Kleiner (2008).
• Cheeger-Kleiner-N. (2009).
• Austin-N.-Tessera (2010).
• Li (2013).
H does not embed into
any uniformly convex space:

Heisenberg non-embeddability
• Mostow-Pansu-Semmes (1996).
• Cheeger (1999).
• Pauls (2001).
• Lee-N. (2006).
• Cheeger-Kleiner (2006).
• Cheeger-Kleiner (2007).
• Cheeger-Kleiner (2008).
• Cheeger-Kleiner-N. (2009).
• Austin-N.-Tessera (2010).
• Li (2013).

[ANT (2010)]: Hilbertian case
c`2(Bn; dW) ³plogn:

[ANT (2010)]: Hilbertian case
A limiting argument combined with [Aharoni-Maurey-Mityagin (1985), Gromov (2007)] shows that it suffices to treat embeddings that are 1-cocycles associated to an action by affine isometries. By [Guichardet (1972)] it further suffices to deal with coboundaries. This is treated by examining each irreducible representation separately.
c`2(Bn; dW) ³plogn:

[ANT (2010)]: q-convex case
If is q-convex then
(X;k ¢ kX)
cX(Bn; dW ) &X
µlogn
log logn
¶1=q
:

[ANT (2010)]: q-convex case, continued
Qualitative statement: There is no bi-Lipschitz embedding of the Heisenberg group into an ergodic Banach space X via a 1-cocycle associated to an action by affine isometries.
X is ergodic if for every linear isometry and every the sequence
converges in norm.
T :X!Xx 2X
1
n
n¡1X
j=1
T jx

[ANT (2010)]: q-convex case, continued
N.-Peres (2010): In the case of q-convex spaces, it suffices to treat 1-cocycle associated to an affine action by affine isometries.
For combining this step with the use of ergodicity, uniform convexity is needed, because by [Brunel-Sucheston (1972)], ultrapowers of X are ergodic if and only if X admits an equivalent uniformly convex norm.

[ANT (2010)]: q-convex case, continued
Conclusion of proof uses algebraic properties of cocycles combined with rates of convergence for the mean ergodic theorem in q-convex spaces.
Li (2013): A quantitative version of Pansu’s differentiation theorem. Suboptimal bounds.

Almost matching embeddability
Assouad (1983): If a metric space is O(1)-doubling then there exists and 1-Lipschitz functions such that for ,
(M;dM)
k 2 N©Áj :M ! Rk
ªj2Z x; y 2M
dM(x; y) 2 [2j¡1;2j] =) kÁj(x)¡Áj(y)k2 & dM(x; y):

Almost matching embeddability
Assouad (1983): If a metric space is O(1)-doubling then there exists and 1-Lipschitz functions such that for ,
So, define by
For the bi-Lipschitz distortion of f is of order
(M;dM)
k 2 N©Áj :M ! Rk
ªj2Z x; y 2M
dM(x; y) 2 [2j¡1;2j] =) kÁj(x)¡Áj(y)k2 & dM(x; y):
f : Bn !O(logn)M
j=1
Rk f(x) =
O(logn)M
j=1
Áj(x):
p 2 [2;1)
(logn)1=p:

Lafforgue-N., 2012
Theorem. For every q-convex space every and every ,
(X;k ¢ kX);n 2 Nf : H!X
n2X
k=1
X
x2Bn
kf(xck)¡ f(x)kqXk1+q=2
.XX
x2B21n
¡kf(xa)¡ f(x)kqX + kf(xb)¡ f(x)kqX
¢:

The proof of this inequality relies on real-variable Fourier analytic methods. Specifically, a vector-valued Littlewood-Paley-Stein inequality due to Martinez, Torrea and Xu (2006), combined with a geometric argument.
For embeddings into one can use the classical Littlewood-Paley inequality instead.
`p

Sharp non-embeddability
If
and
8x; y 2B22n; dW(x; y) 6 kf(x)¡ f(y)kX 6DdW(x; y);
X
x2B21n
¡kf(xa)¡ f(x)kqX + kf(xb)¡ f(x)kqX
¢
. DqjB21nj ³ Dqn4;
n2X
k=1
X
x2Bn
kf(xck)¡ f(x)kqXk1+q=2
>n2X
k=1
X
x2Bn
dW (xck; x)q
k1+q=2
&n2X
k=1
X
x2Bn
kq=2
k1+q=2³ jBnj logn ³ n4 log n:
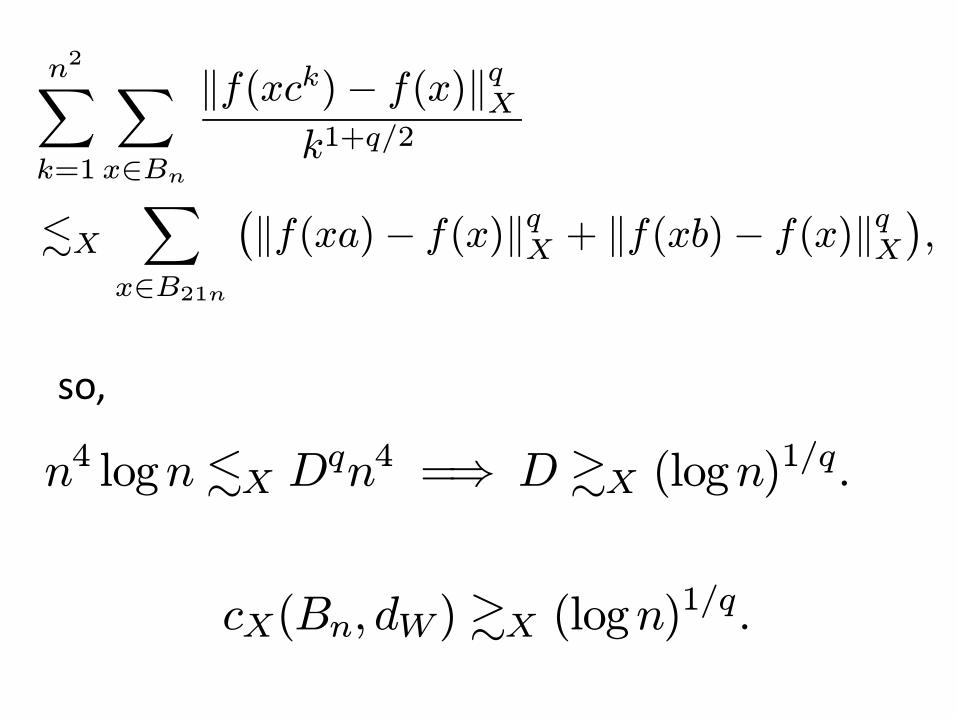
so,
n2X
k=1
X
x2Bn
kf(xck)¡ f(x)kqXk1+q=2
.XX
x2B21n
¡kf(xa)¡ f(x)kqX + kf(xb)¡ f(x)kqX
¢;
n4 logn.X Dqn4 =) D &X (logn)1=q:
cX(Bn; dW) &X (logn)1=q:

Sharp distortion computation
p 2 (1;2] =) c`p (Bn; dW ) ³pplogn:
p 2 [2;1) =) c`p (Bn; dW) ³p (logn)1=p:

The Sparsest Cut Problem
Input: Two symmetric functions
Goal: Compute (or estimate) in polynomial time the quantity
C;D : f1; : : : ; ng£f1; : : : ; ng ! [0;1):
©¤(C;D) = min;6=S(f1;:::;ng
Pn
i;j=1C(i; j)j1S(i)¡ 1S(j)jPn
i;j=1D(i; j)j1S(i)¡ 1S(j)j:

The Goemans-Linial Semidefinite Program
The best known algorithm for the Sparsest Cut Problem is a continuous relaxation called the Goemans-Linial SDP (~1997).
Theorem (Arora, Lee, N., 2005). The Goemans-Linial SDP outputs a number that is guaranteed to be within a factor of
of
(logn)12+o(1)
©¤(C;D):

Minimize
over all ,
subject to the constraints
and
nX
i;j=1
C(i; j)kvi ¡ vjk22
v1; : : : ; vn 2 Rn
nX
i;j=1
D(i; j)kvi ¡ vjk22 = 1;
8 i; j; k 2 f1; : : : ; ng;kvi ¡ vjk22 6 kvj ¡ vkk22 + kvk ¡ vjk22:

The link to the Heisenberg group
Theorem (Lee-N., 2006): The Goemans-Linial SDP has an integrality gap of at least .
c`1(Bn; dW)

Cheeger-Kleiner-N., 2009: There exists a universal constant c>0 such that
Cheeger-Kleiner, 2007, 2008: Non-quantitative versions that also reduce matters to ruling out a certain more structured embedding.
Quantitative estimate controls phenomena that do not have qualitative counterparts.
c`1(Bn; dW) > (logn)c:

Khot-Vishnoi (2005): The Goemans-Linial SDP has integrality gap at least . (log logn)c

How well does the G-L SDP perform?
Conjecture:
Remark: In a special case called Uniform Sparsest Cut (approximating graph expansion) the G-L SDP might perform better. The best known performance guarantee is [Arora-Rao-Vazirani, 2004] and the best known integrality gap lower bound is
[Kane-Meka, 2013].
c`1(Bn; dW) &plogn:
.plogn
ecplog logn

Vertical perimeter versus horizontal perimeter
Conjecture: For every smooth and compactly supported
Lemma: A positive solution of this conjecture implies that
f : R3 ! R;ÃZ 1
0
µZ
R3jf(x; y; z + t)¡ f(x; y; z)jdxdydz
¶2dt
t2
! 12
.Z
R3
µ¯̄¯̄@f@x
(x; y; z)
¯̄¯̄+¯̄¯̄@f@y
(x; y; z) + x@f
@z(x; y; z)
¯̄¯̄¶dxdydz:
c`1(Bn; dW) &plogn:

Theorem (Lafforgue-N., 2012): For every p>1,
ÃZ 1
0
µZ
R3jf(x; y; z + t)¡ f(x; y; z)jpdxdydz
¶2=pdt
t2
!1=2
.p
µZ
R3
µ¯̄¯̄@f@x
(x; y; z)
¯̄¯̄p
+
¯̄¯̄@f@y
(x; y; z) + x@f
@z(x; y; z)
¯̄¯̄p¶
dxdydz
¶1=p
:

Equivalent form of the conjecture
Let A be a measurable subset of For t>0 define
Then
R3.
vt(A) = vol³©
(x; y; z) 2 A : (x; y; z + t) =2 Aª´
:
Z 1
0
vt(A)2
t2dt . PER(A)2:


Proof of the vertical versus horizontal Poincare inequality
Equivalent statement: Suppose that is q-convex and is smooth and compactly supported. Then
(X;k ¢ kX)f : R3 !X
µZ 1
0
Z
R3
kf(x; y; z + t)¡ f(x; y; z)kqXt1+q=2
dxdydz
¶ 1q
.X
µZ
R3
µ°°°°@f
@x(x; y; z)
°°°°q
X
+
°°°°@f
@y(x; y; z) + x
@f
@z(x; y; z)
°°°°q
X
¶dxdydz
¶ 1q
:

Proof of the equivalence: partition of unity argument + classical Poincare inequality for the Heisenberg group.

d
d²
¯̄¯̄²=0
f
0@0@1 x z
0 1 y
0 0 1
1A0@1 ² 0
0 1 0
0 0 1
1A1A
=d
d²
¯̄¯̄²=0
f
0@0@1 x+ ² z
0 1 y
0 0 1
1A1A =
@f
@x:
a =
0@1 1 0
0 1 0
0 0 1
1A and b =
0@1 0 0
0 1 1
0 0 1
1A

d
d²
¯̄¯̄²=0
f
0@0@1 x z
0 1 y
0 0 1
1A0@1 0 0
0 1 ²
0 0 1
1A1A
=d
d²
¯̄¯̄²=0
f
0@0@1 x z + ²x
0 1 y + ²
0 0 1
1A1A =
@f
@y+ x
@f
@z:
a =
0@1 1 0
0 1 0
0 0 1
1A and b =
0@1 0 0
0 1 1
0 0 1
1A

The Poisson semigroup
Pt(x) =1
¼(t2 + x2):
Qt(x) =@
@tPt(x) =
x2 ¡ t2
¼(t2 + x2)2:

Vertical convolution
For à 2 L1(R);
à ¤ f(x; y; z) =Z
RÃ(u)f(x; y; z ¡ u)du 2 X:

Heisenberg gradient
Proposition:
rHf =
µ@f
@x;@f
@y+ x
@f
@z
¶: R3 !X ©X:
µZ 1
0
Z
R3
kf(x; y; z + t)¡ f(x; y; z)kqXt1+q=2
dxdydz
¶ 1q
.µZ 1
0
tq¡1 kQt ¤ rHfkqLq(R3;X©X)dt
¶ 1q
:

Littlewood-Paley
By Martinez-Torrea-Xu (2006), the fact that X is q-convex implies
So, it remains to prove the proposition.
µZ 1
0
tq¡1 kQt ¤ rHfkqLq(R3;X©X)dt
¶ 1q
. krHfkLq(R3;X©X) :

By a variant of a classical argument (using Hardy’s inequality and semi-group properties),
µZ 1
0
Z
R3
kf(x; y; z + t)¡ f(x; y; z)kqXt1+q=2
dxdydz
¶ 1q
.µZ 1
0
tq2¡1 kQt ¤ fkqLq(R3;X)
dt
¶ 1q
:

So, we need to show that
µZ 1
0
tq2¡1 kQt ¤ fkqLq(R3;X)
dt
¶ 1q
.µZ 1
0
tq¡1 kQt ¤ rHfkqLq(R3;X©X) dt
¶ 1q
:

Key lemma: For every t>0,
kQt ¤ f ¡Q2t ¤ fkLq(R3;X)
.pt kQt ¤ rHfkLq(R3;X©X)

The desired estimate
Follows from key lemma by the telescoping sum
µZ 1
0
tq2¡1 kQt ¤ fkqLq(R3;X)
dt
¶ 1q
.µZ 1
0
tq¡1 kQt ¤ rHfkqLq(R3;X©X) dt
¶ 1q
Qt ¤ f =
1X
m=1
(Q2m¡1t ¡Q2mt ¤ f) :

Proof of key lemma
Since we have .
So, by identifying with , for every ,
P2t = Pt ¤Pt Q2t = Pt ¤Qt
R3 H h 2 R3
Qt ¤ f(h)¡Q2t ¤ f(h)= Qt ¤ f(h)¡ Pt ¤Qt ¤ f(h)
=
Z
RPt(u)
¡Qt ¤ f(h)¡Qt ¤ f(hc¡u)
¢du:

For every s>0 consider the commutator path
°s(µ) =8>><>>:
aµ if 0 6 µ 6ps;
apsbµ¡
ps if
ps 6 µ 6 2
ps;
apsbpsa¡µ+2
ps if 2
ps 6 µ 6 3
ps;
apsbpsa¡
psb¡µ+3
ps if 3
ps 6 µ 6 4
ps:
°s : [0;4ps]! R3;

So, and
Hence,
°s(4ps) =
haps; b
psi= [a; b]s = cs:
°s(0) = 0 = eH
Qt ¤ f(h)¡Qt ¤ f(hc¡u)
=
Z 4pu
0
d
dµQt ¤ f
¡hc¡u°u(µ)
¢dµ:

By design, is one of
or
where and .
We used here the fact that since is convolution along the center, it commutes with
ddµQt ¤ f (hc¡u°u(µ))
@aQt ¤ f(hc¡u°u(µ)) =Qt ¤ @af(hc¡u°u(µ))
@bQt ¤ f(hc¡u°u(µ)) =Qt ¤ @bf(hc¡u°u(µ));@a = @x @b = @y +x@z
Qt
@a; @b:

We saw that
Now the key lemma follows from the triangle inequality and the fact that
Qt ¤ f(h)¡Q2t ¤ f(h))
=
Z
RPt(u)
¡Qt ¤ f(h)¡Qt ¤ f(hc¡u)
¢du
=
Z
RPt(u)
Z 4pu
0
d
dµQt ¤ f
¡hc¡u°u(µ)
¢dµdu:
Z 1
0
puPt(u)du ³
pt: