vex robotics - technical journal
TRANSCRIPT

PrologueSince you have downloaded and opened up this PowerPoint
presentation, I would just like to say, thank you for taking your time reading this. Winning regionals and the state Vex Robotics Competition and heading to the worlds competition has been the biggest achievement I have ever met and the most I am proud of. Of course this isn’t my only field of accomplishments, I am also proud of winning regionals for Science Olympiad and to be able to head to states (The outcome of the states competition is still unknown in the present time I am writing). I would like to share with you on what I have done with my teammates in order to have a more positive look into what I can offer in the field of engineering by showing my technical journal. So thank you again for taking your time reading this presentation.
Sincerely: Joseph Han
Born: 7/18/1997

Winning Regionals Highest Award (Excellence Award)
Making it To Vex Robotics States Competition
http://tapinto.net/articles/sparta-high-school-robotics-team-earns-a-slot-at
Making It To Vex Robotics Worlds Competition:
http://tapinto.net/articles/sparta-high-school-robotics-team-headed-to-worlds

Pre-State Robot

What is Vex Robotics Competition?
Watch this video to know how the competition workshttps://www.youtube.com/watch?v=PJ-5H3JVtPs

What is The Worlds Competition?
Watch this video to know how the Worlds Competition looks like
https://www.youtube.com/watch?v=9bQWFW33yAU

Technical Journal
Manualhttp://content.vexrobotics.com/docs/vex-skyrise/VEX-Skyrise-GameManual-Rev20140729.pdf
The technical journal is still incomplete
as we are still learning and reconstructing
from our past competitions in order to
develop a more successful robot for the
Worlds Competition.
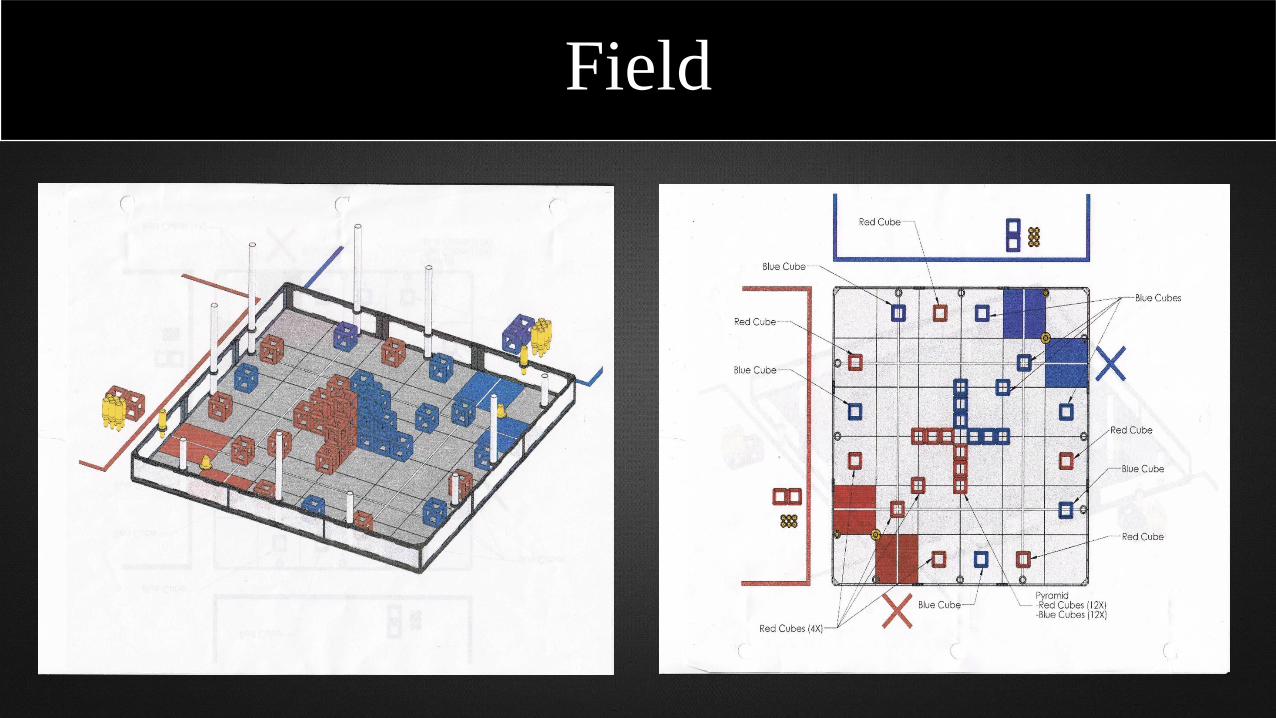
Field

Define The Problem:
The robot must be able to traverse quickly but accurately, grab the yellow cylinders and or the cubes and lift these objects up to 65 inches. The robot must maintain stability while lifting the objects, and it must be able to maneuver accurately while the object is lifted. Speed is of the essence.
Constraints:
1. 18”x18”x18” (preferably slightly below to avoid disqualification) 2. 10 Motors
3. Cannot Y off a Y 4. Place to hold flags / license plate
Wants:
1. Holonomic drive 2. Reach height of 65 inches
3. Autonomous scoring- possibly placing a cube/ cylinder 4. Mechanism to make placing objects easier
a. either mechanical or sensor based
5. Possible switching mechanism to differentiate between cylinders and cubes
Develop a solution:
Chassis: Mecanum Wheels.
Claw: Double Passive claw. Hook to pick up cube. Passive wheels used to grab and hold onto skyrise.
Lift: 6-Bar Linkage.
http://content.vexrobotics.com/docs/instructions/VEX_PneumaticsKit-INST-0712.pdf

Test and Evaluate
Test# Testing for… Results Changes Made/ Redesign
1 Lifting Capabilities. (one cube, before claw attachment).
Was able to lift the cube well. Claw soon to be added.
2 Driving Capabilities. Was able to drive well, but a couple of axles fell out. Installed lock and collar to keep axles in place.
3 Driving Capabilities. Could drive well and lock and collars kept axles in place. No changes.
4 The Claw (Not Attached to the robot). Tested on the various scoring objects and could hold onto the skyrisepieces and the cubes.
Adjusted rubber bands for tension and adjusted size.
5 Lifting Capabilities (Claw Attached To Robot). Arm could lift while supporting the weight of the claw. Added a chain system to enable the claw to rise as the arm rises.
6 Lifting Capabilities (Claw Attached To Robot). Robot didn’t have enough torque to lift when the claw was added, then the arm broke down. When arm descends, the bar linkages
collided with each other a bit.
Added additional motors to increase torque. Plexiglass was added to make the descent smoother. Rubber bands added
for tension.
7 Lifting Capabilities (Claw Attached To Robot). Robot was able to lift with the claw’s weight, cube, and skyrise piece, and has no torque issues.
No changes.
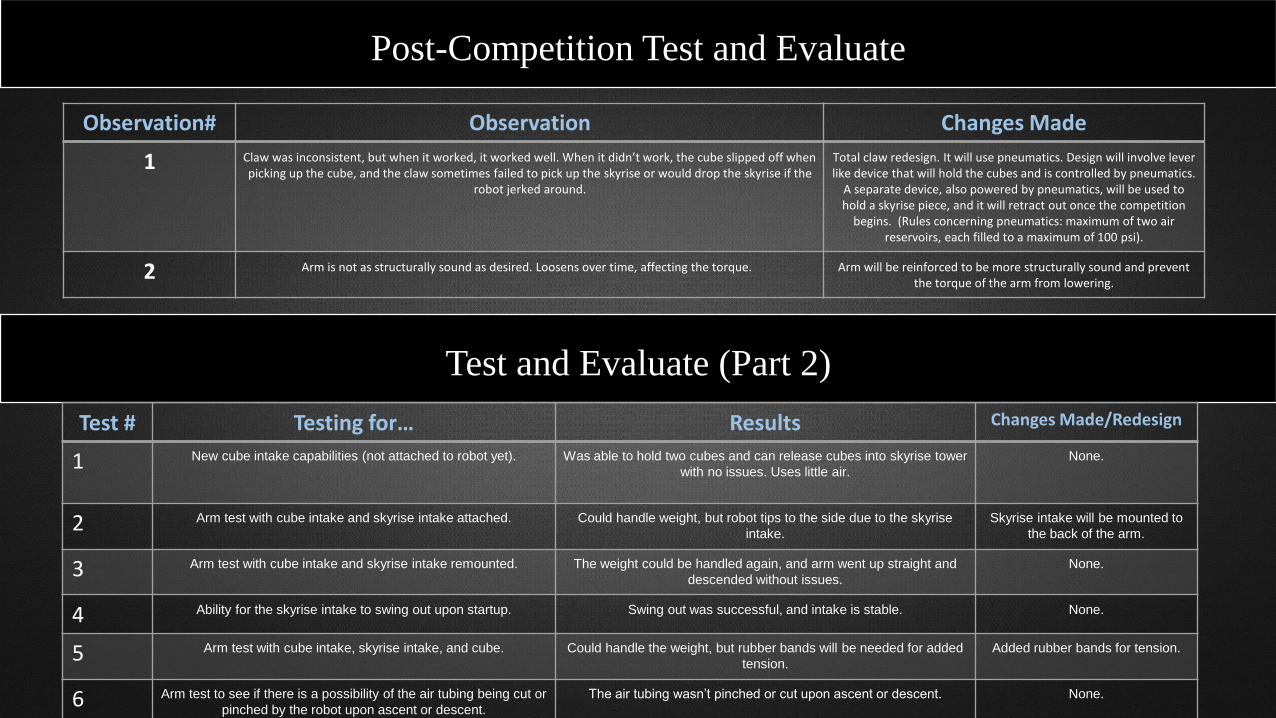
Post-Competition Test and Evaluate
Observation# Observation Changes Made
1 Claw was inconsistent, but when it worked, it worked well. When it didn’t work, the cube slipped off when picking up the cube, and the claw sometimes failed to pick up the skyrise or would drop the skyrise if the
robot jerked around.
Total claw redesign. It will use pneumatics. Design will involve lever like device that will hold the cubes and is controlled by pneumatics.
A separate device, also powered by pneumatics, will be used to hold a skyrise piece, and it will retract out once the competition
begins. (Rules concerning pneumatics: maximum of two air reservoirs, each filled to a maximum of 100 psi).
2 Arm is not as structurally sound as desired. Loosens over time, affecting the torque. Arm will be reinforced to be more structurally sound and prevent the torque of the arm from lowering.
Test and Evaluate (Part 2)
Test # Testing for… Results Changes Made/Redesign
1 New cube intake capabilities (not attached to robot yet). Was able to hold two cubes and can release cubes into skyrise tower
with no issues. Uses little air.
None.
2 Arm test with cube intake and skyrise intake attached. Could handle weight, but robot tips to the side due to the skyrise
intake.
Skyrise intake will be mounted to
the back of the arm.
3 Arm test with cube intake and skyrise intake remounted. The weight could be handled again, and arm went up straight and
descended without issues.
None.
4 Ability for the skyrise intake to swing out upon startup. Swing out was successful, and intake is stable. None.
5 Arm test with cube intake, skyrise intake, and cube. Could handle the weight, but rubber bands will be needed for added
tension.
Added rubber bands for tension.
6 Arm test to see if there is a possibility of the air tubing being cut or
pinched by the robot upon ascent or descent.
The air tubing wasn’t pinched or cut upon ascent or descent. None.

Sketches (Chassis)

This is our design of the chassis. We use mecanum wheels in order to drive in multiple directions via side to side and angled directions. It is powered with 300 servo motors with a 1 to 2 gear ratio for more torque. The chassis is made entirely of galvanized steel so that the center of mass is directed towards the lower body so that the robot won’t tip over. We are going to keep our current design of the chassis when entering worlds.
Sketches (Claw)

This was our very first design of our claw. We went through many alterations with the design, but failed most of the time. As we gained more knowledge of the competition we became more successful and decided to go with pneumatics which is in the pre-state competition slide of the presentation.

Sketches (Lift)
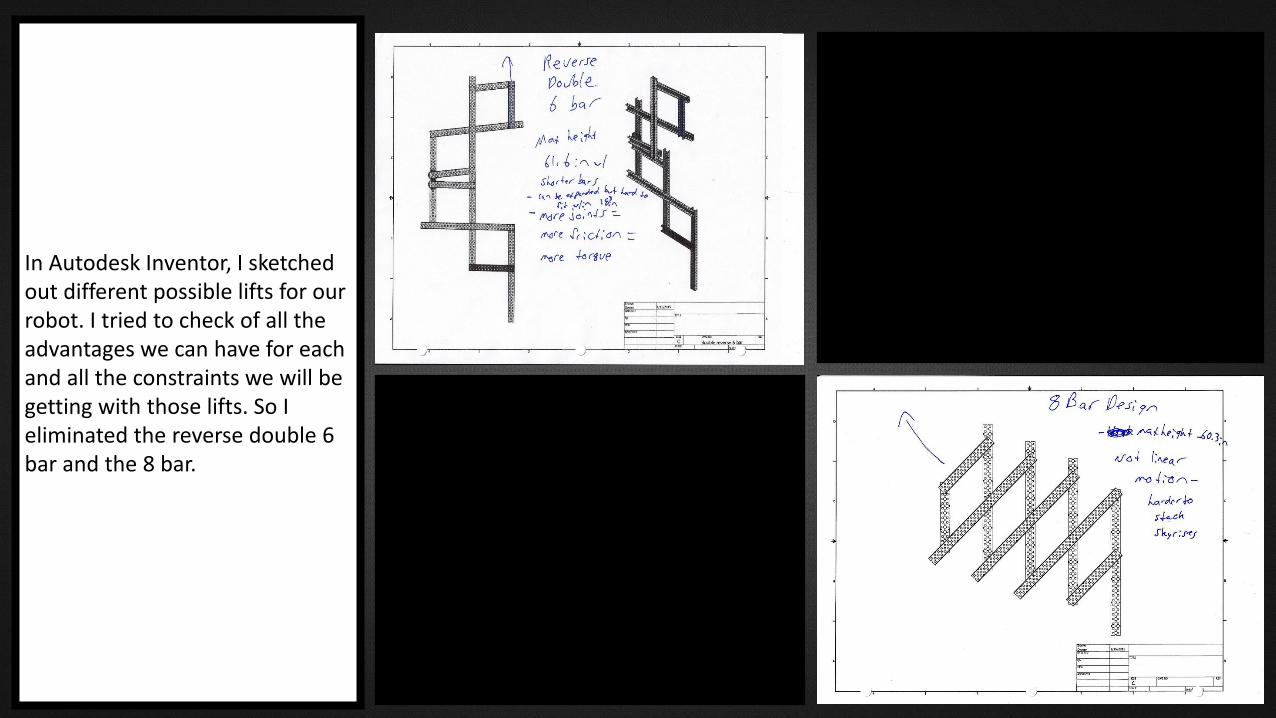
In Autodesk Inventor, I sketched out different possible lifts for our robot. I tried to check of all the advantages we can have for each and all the constraints we will be getting with those lifts. So I eliminated the reverse double 6 bar and the 8 bar.

As the reverse double 6 bar and the 8 bar was out of the equation, what was left was the reverse double 4 bar made entirely of aluminum with a 5 to 7 gear ratio. It had met our requirements and had the least amount of constraints. The problems we found were that it was too thin when put together, so bending occurs. We couldn’t put the motors on the c-channel parallel to the grounded 5 hole c-channel, so we had to put it on the 5 hole c-channel using a turntable, which gives less torque and using up all 6 motors that was left over.

Sketches (Pre-States Competition Changes)
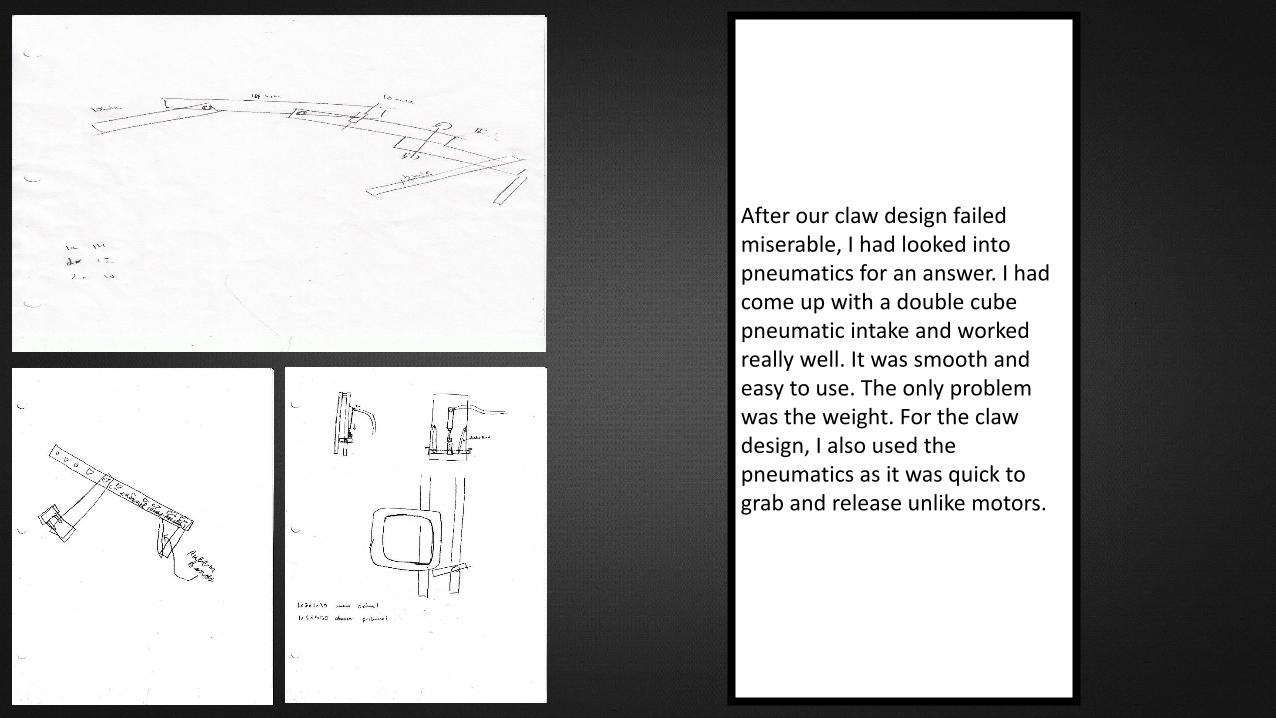
After our claw design failed miserable, I had looked into pneumatics for an answer. I had come up with a double cube pneumatic intake and worked really well. It was smooth and easy to use. The only problem was the weight. For the claw design, I also used the pneumatics as it was quick to grab and release unlike motors.

In Autocad I created a grid to know what order to place each pneumatics parts from the vex pneumatics kit and how far from each they should be to prevent the tubings from pinching.

Preparing for Worlds
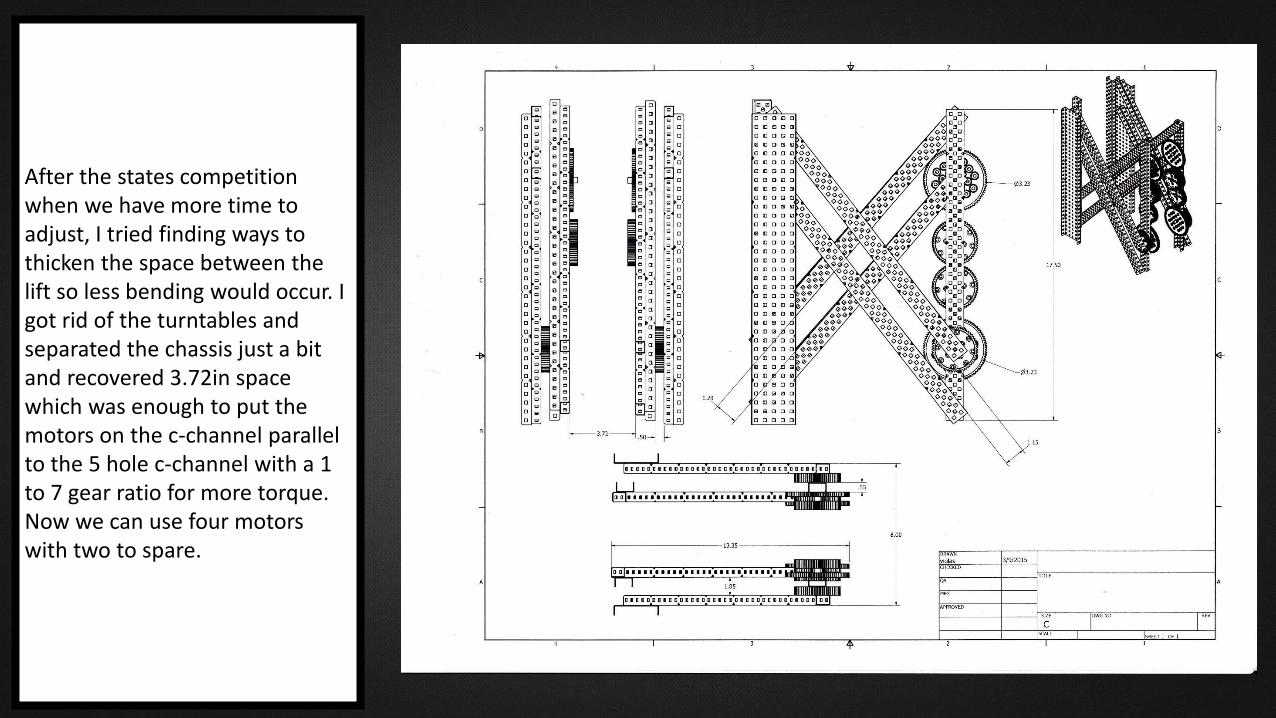
After the states competition when we have more time to adjust, I tried finding ways to thicken the space between the lift so less bending would occur. I got rid of the turntables and separated the chassis just a bit and recovered 3.72in space which was enough to put the motors on the c-channel parallel to the 5 hole c-channel with a 1 to 7 gear ratio for more torque. Now we can use four motors with two to spare.

Open valves. Make sure skyrise intake is on the correct side Fill up with air. License plates are on. Check rubber bands. Make sure the cube intake is bent in and set up properly. Plug in air tubes for the skyrise and cube intakes. Change to the correct autonomous (flip potentiometer switch).

After the states competition, we created a evaluation list of our robot to see what we need to fix and what to emphasize more in. We are currently trying to fix all the weakness we have and put in all the needs.

All Parts List & Motors to Ports List
Chassis Parts List
• 6x 17in C Channels
• 4x Mecanum Wheels
• 2x 300 Series Motors
• 2x Encoder Motors.
• 4x 12 Heavy Sprocket Gears
• 4x18 Heavy Sprocket Gears
• 4x 5.5 inch axles
1/2 of Arm Parts List
• 1x Large Turret
• 2x Small Turret
• 1x Encoder Motor
• 1x 300 Series Motors
• 1x C-Channel (5x35)
• 6x Standard 35 Hole C-Channel
• Various Scrap Standard C-Channel (4 or 5 must be cut down to length 4 or 5)
• 8x Standoffs (1 inch)
• 4x Standoffs (2 inch)
• 2x Heavy Gears (84 tooth)
Motor to Port List (Lift)
• Lift Left Front - A - 9
• Lift Left Back - B - 8
• Lift Right Back - C - 2
• Lift Right Front - D -3
Wheel
• Right Front Wheel -4
• Right Back Wheel - 5
• Left Front Wheel - 6
• Left Back Wheel- 7

Research
http://www.vexmen.com/2014/09/skyrise-lift-discussion-for-new-vex-teams/different design for a reverse double
http://polynomic3d.com/user/smith/vex-lift-calc.htmlhttp://botsnstuff.com/wiki/N-Bar_Linkage
http://curriculum.vexrobotics.com/curriculum/object-manipulation/manipulators ----- This link has information on the claw and other manipulators. Standard Claw (rubber bands can keep claw gripped on target even when motor is off).Pinching Claw Roller Claw
Vex Products-
nylon tubingnon slip matsshoulder screwsc channel connectorssteel lock bar
http://www.vexrobotics.com/vex/products/accessories/structure/276-1408.htmlThis possibly to make proper joints with low slop? Shoulder screwshttp://www.vexrobotics.com/vex/products/accessories/structure/275-1065.htmlVex product- lock bar made of steelhttp://www.vexrobotics.com/vex/products/accessories/structure/276-2575.htmlC channel insert
http://www.intelitek.com/vex-skyrise-lessons-from-team-1103/ ---------Here’s a robot with a very good claw.
https://www.youtube.com/watch?v=LK0HpNEtmqc -----------Here’s a possible way for a passive cube intake.
https://www.youtube.com/watch?v=ZtPBgfggwFU ----------Here’s an idea for a passive skyrise section intake.
http://www.robives.com/mechshttp://grabcad.com/