vibs lecture 2
TRANSCRIPT

8/7/2019 Vibs Lecture 2
http://slidepdf.com/reader/full/vibs-lecture-2 1/16
Always the Same Equation of Motion
02
2
! Kxdt
xd
M
Mass m on a spring:
Pendulum:
02
2
! k xdt
xd m
0)/(2
2
! UU
Lmg dt
d m
04
52
2
! k xdt
xd mTwo-mass/Pulley system:
Equation of Motion always of the form:
M = ³mass-like´ quantity
K = ³spring-like´ quantityx = ³position-like´ variable
02
2
! x
M
K
dt
xd General solution can only depend on
the combined quantity K/M
Rotating bar: 02
21
2
2
! UU
kLdt
d I c
8/7/2019 Vibs Lecture 2
http://slidepdf.com/reader/full/vibs-lecture-2 2/16
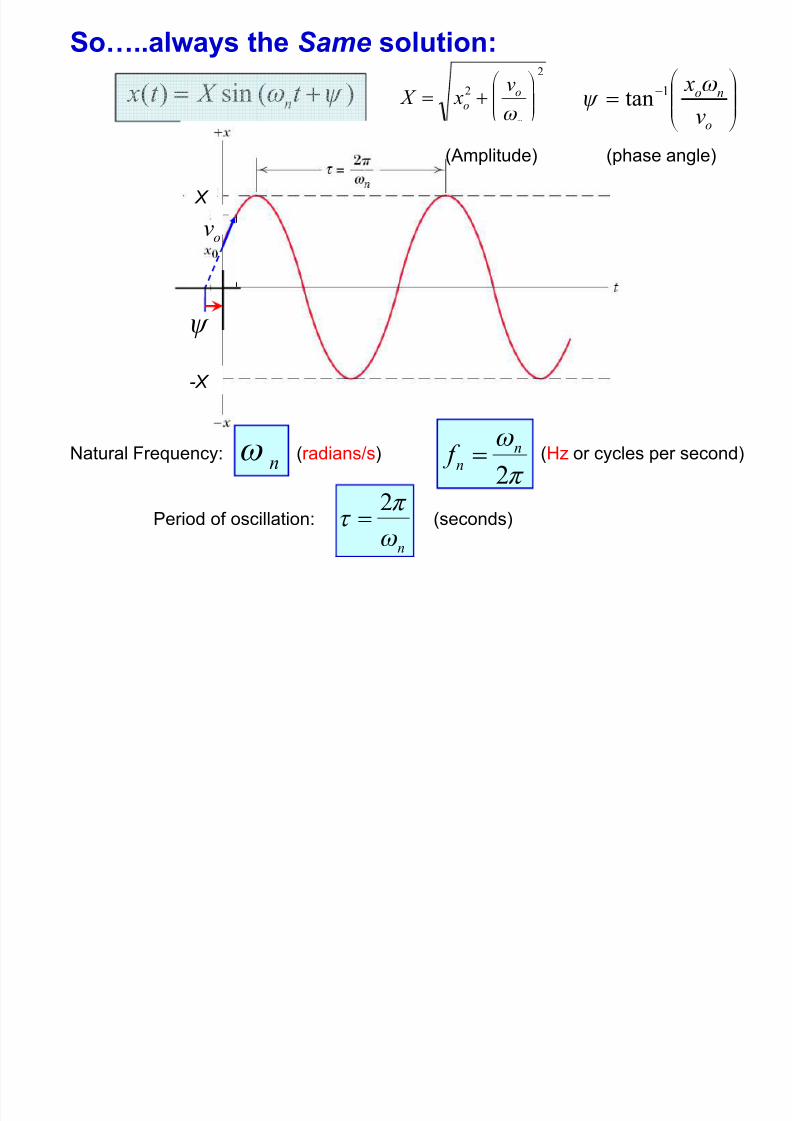
)(sin)( ] [ ! t X t x n
2
2
¹¹ º
¸©©ª
¨!
n
oo
v x X
[ ¹¹
º
¸©©
ª
¨!
o
no
v
x [] 1tan
X
-X
ov
]
Period of oscillation:
2
n
T
X [ ! (seconds)
Natural Frequency:n[ (radians/s) (Hz or cycles per second)
2
nn
f [
T !
(Amplitude) (phase angle)
So«..always the Same solution:
8/7/2019 Vibs Lecture 2
http://slidepdf.com/reader/full/vibs-lecture-2 3/16
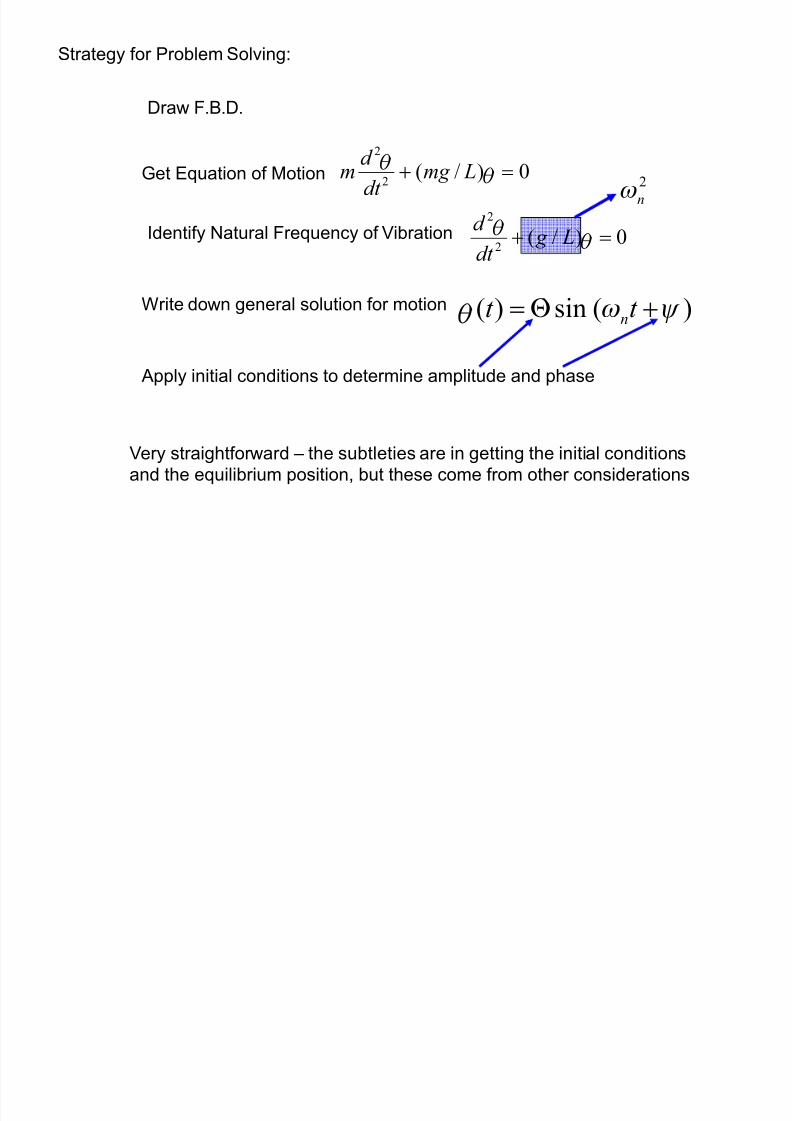
Strategy for Problem Solving:
2
n[
Very straightfor ward ± the subtleties are in getting the initial conditions
and the equilibrium position, but these come from other considerations
Apply initial conditions to determine amplitude and phase
Draw F.B.D.
0)/(2
2
! UU
Lm g dt
d mGet Equation of Motion
0)/(2
2
! UU
L g
dt
d Identify Natural Frequency of Vibration
)(sin)( ] [U 5! t t nWrite down general solution for motion

8/7/2019 Vibs Lecture 2
http://slidepdf.com/reader/full/vibs-lecture-2 4/16
Damped Vibrations
�Force depends on
Velocity
� Pull quickly larger resistance
� Pull slowly small resistance
� Force opposes direction of (linear) motion
� Mechanical Energy is lost; dissipated in moving viscous fluid
All systems have some damping ± friction, air resistance, etc.
Here, we consider damping by ³linear viscous dampers´, i.e. ³dashpots´
Dashpot (viscous damper ):
Piston filledwith a viscous fluid
Resisting force cv F !
Velocity v
c = viscous damping coefficient
8/7/2019 Vibs Lecture 2
http://slidepdf.com/reader/full/vibs-lecture-2 5/16
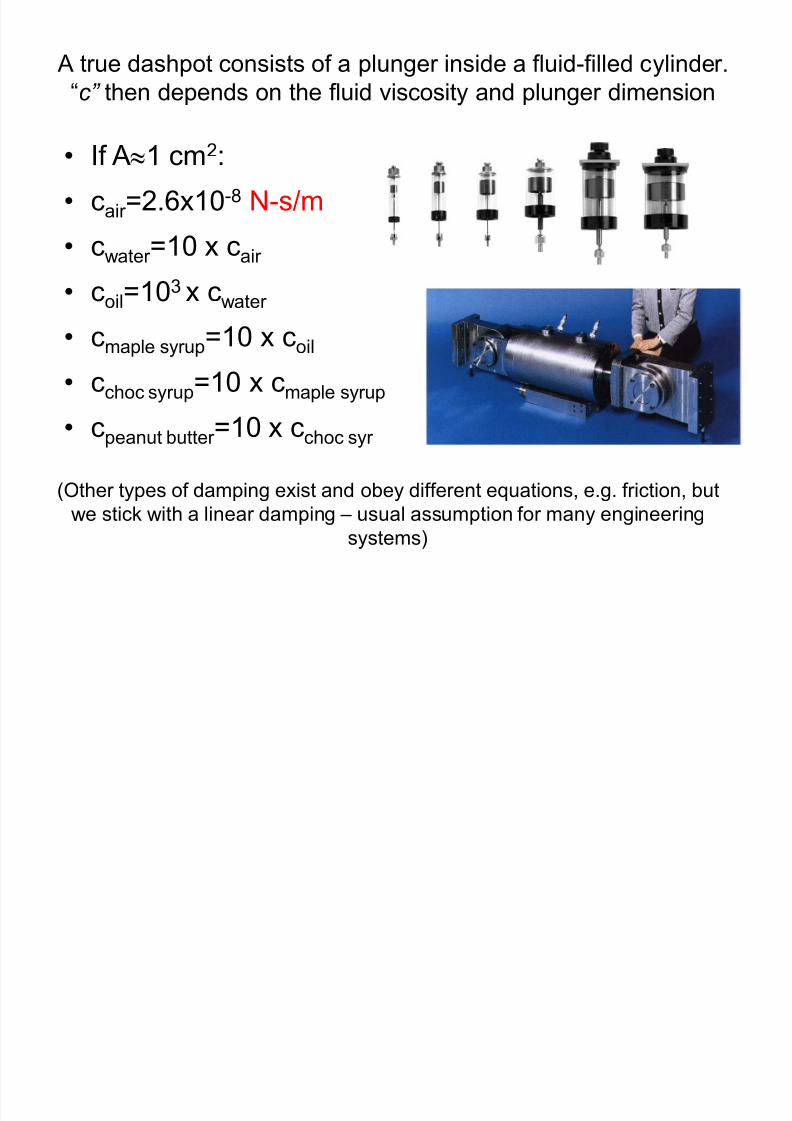
A true dashpot consists of a plunger inside a fluid-filled cylinder.
³c´ then depends on the fluid viscosity and plunger dimension
� If A}1 cm2:
� cair =2.6x10-8 N-s/m
� cw
ater =10 x c
air
� coil=103 x cwater
� cmaple syrup=10 x coil
�cchoc syrup=
10x cmaple syrup
� cpeanut butter =10 x cchoc syr
(Other types of damping exist and obey different equations, e.g. friction, but
we stick with a linear damping ± usual assumption for many engineering
systems)
8/7/2019 Vibs Lecture 2
http://slidepdf.com/reader/full/vibs-lecture-2 6/16
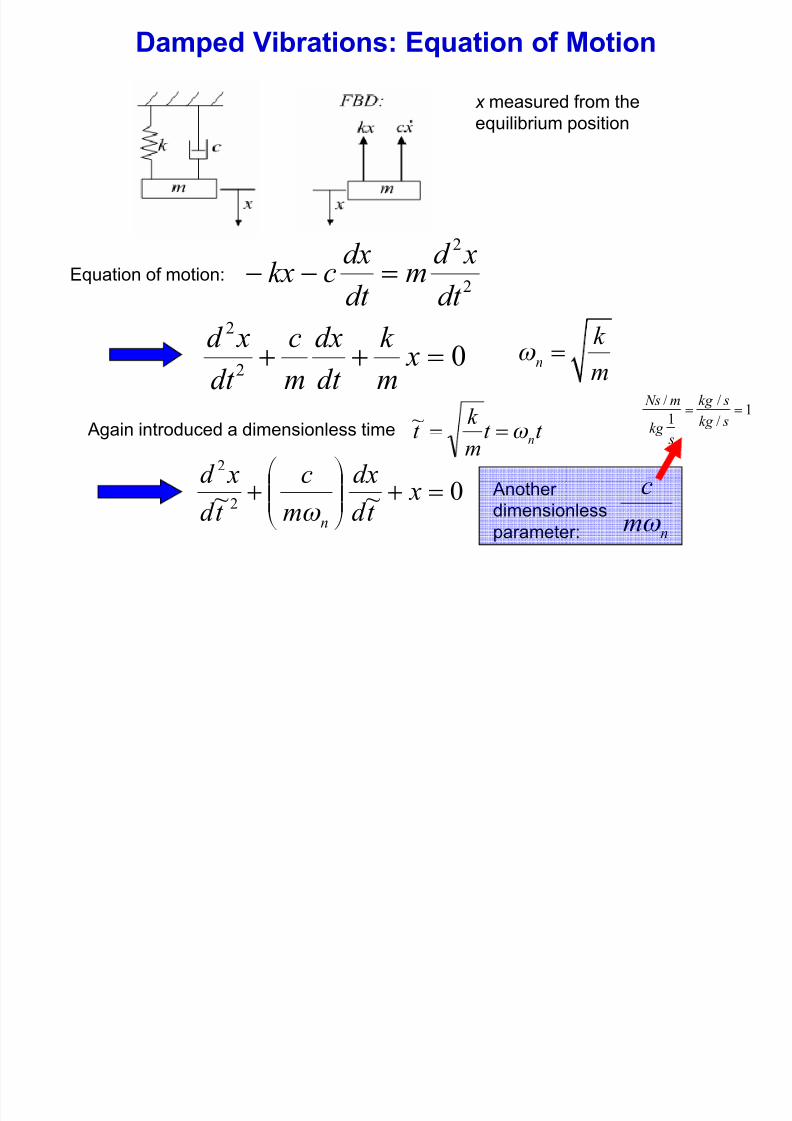
Damped Vibrations: Equation of Motion
x measured from the
equilibrium position
Equation of motion:2
2
dt xd m
dt dxck x !
Again introduced a dimensionless time t t m
k t n[ !!~
n
k
m[ !0
2
2
! xm
k
d
t
d x
m
c
d
t
xd
0~~2
2
!¹¹
º
¸©©
ª
¨ x
t d
d x
m
c
t d
xd
n[
Another
dimensionless
parameter: nm
c
[
1/
/
1
/!!
sk g
sk g
sk g
m N s

8/7/2019 Vibs Lecture 2
http://slidepdf.com/reader/full/vibs-lecture-2 7/16
n
k
m[ !0
2
2
! x
m
k
dt
dx
m
c
dt
xd
02
2
2
2
! xdt
dx
dt
xd
nn [ :[ nm
c
zeta [ : 2"" !!
³Viscous Damping Factor´
Characterizes strength of damping
Solution must be a function of time with two parameters: ),;( : [nt x
8/7/2019 Vibs Lecture 2
http://slidepdf.com/reader/full/vibs-lecture-2 8/16
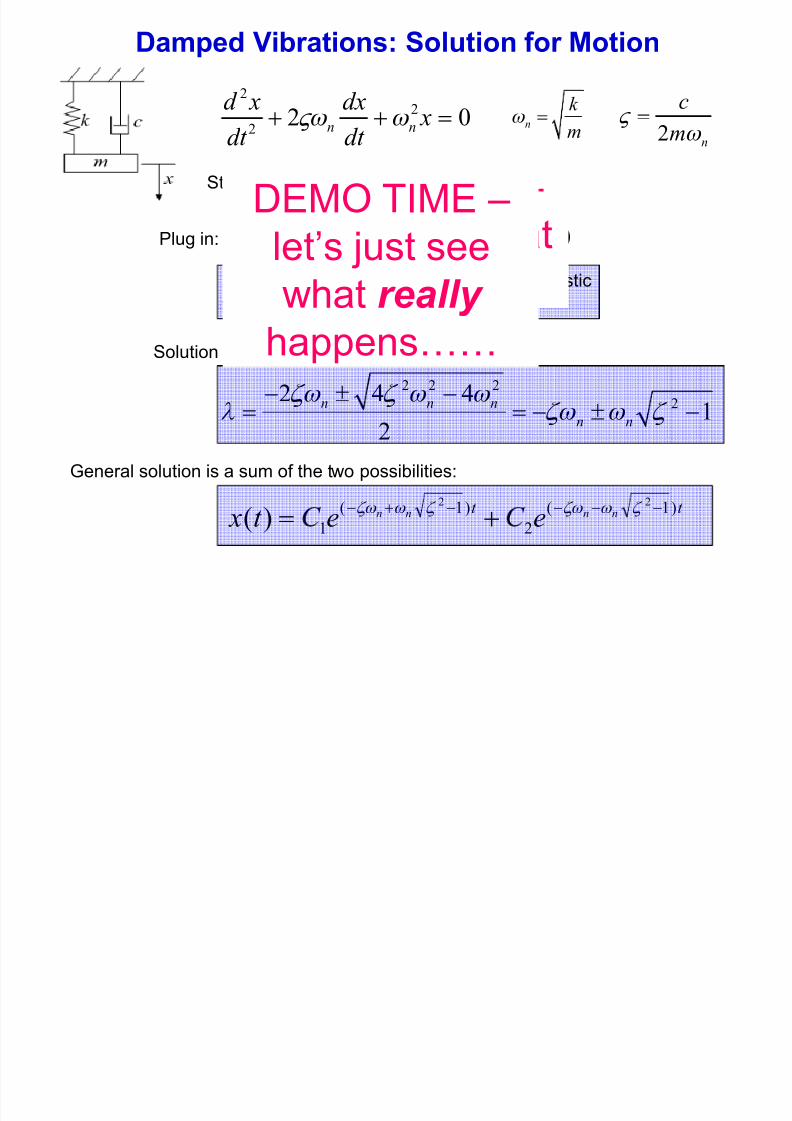
Damped Vibrations: Solution for Motion
( ) t x t CeP!Still try solution:
2 22 0t t t
n ne e eP P PP ^ [ P [ !
General solution is a sum of the two possibilities:
n
k
m
[ !
nm
c
[
:
2!02 2
2
2
! xd t
d x
d t
xd
nn
[: [
Plug in:
2 22 0n nP ^ [ P [ !
Characteristic
Equation
2 2 2
22 4 4 12
n n n
n n^ [ ^ [ [P ^ [ [ ^ s ! ! s
Solution of Characteristic Equation:
t t nnnn
eet x
)1(
2
)1(
1
22
)(
!
^ [^ [^ [^ [
M ATL AB TIME ±
let¶s just see what
comes out««
DEMO TIME ±
let¶s just seewhat r eally
happens««

8/7/2019 Vibs Lecture 2
http://slidepdf.com/reader/full/vibs-lecture-2 9/16
t t nnnn eC eC t x)1(
2
)1(
1
22
)(
!^ [ ^ [ ^ [ ^ [
][)( 1
2
1
1
22 t t t nnn eeet x
!^ [^ [^ [
^ can vary from 0 to g can be positive, negative or zero21^
1^ "³Overdamped´:
12 ^ real
012
1 ! ^ [^ [P nn
0122 ! ^ [ ^ [ P nn
Damping is ³strong´
Motion decays exponentially ± no oscillations at all !
t t eet x 21
21)(PP
!
8/7/2019 Vibs Lecture 2
http://slidepdf.com/reader/full/vibs-lecture-2 10/16
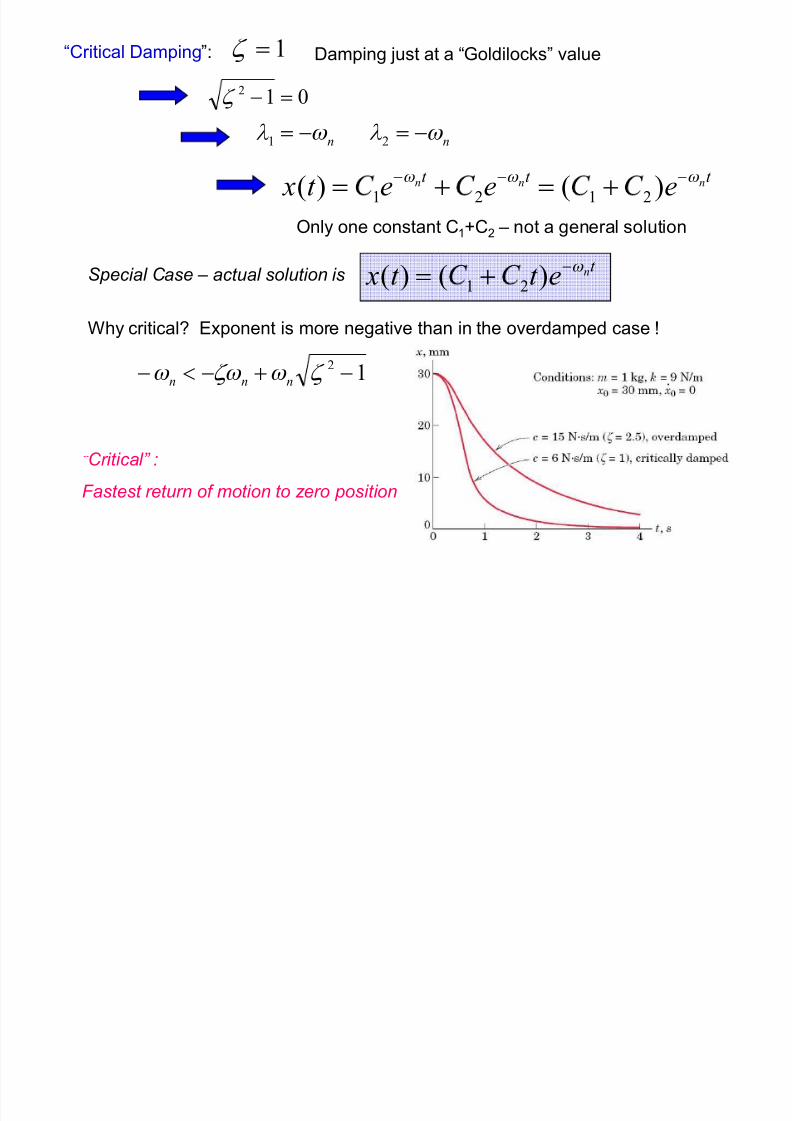
012 !^
n[ P !1 n[ P !2
t t t nnn eeet x[[[
!! )()( 2121
Only one constant C1+C2 ± not a general solution
³Critical Damping´: Damping just at a ³Goldilocks´ value1!^
Special C ase ± actual sol uti on is t net t x [! )()( 21
Why critical? Exponent is more negative than in the overdamped case !
12 ^ [ ^ [ [ nnn
³ Cr itical ́ :
F ast est r eturn of moti on t o z ero positi on

8/7/2019 Vibs Lecture 2
http://slidepdf.com/reader/full/vibs-lecture-2 11/16
Damped
natural
frequency
12 ^ imaginary
x t e e en n nt i t i t ( ) !
^ [ ^ [ ^ [
1
1
2
12 2
Damping is ³weak´ ± most typical case³Underdamped´: 10 ^
][)( 1
2
1
1
22 t it it nnn eeet x^ [^ [^ [
!
21d n[ ^ [ ! ][)(
2
1
t it it d d n eC eC et x[ [ ^ [
!
Looks like undamped case but
with different frequency
)sin()( ] [^ [ ! t X et xd
t n
Oscillatory
motion
Decaying
exponential
0)( pgp t xt Motion always decays to zero; dashpot is
continually sucking energy out of the system
8/7/2019 Vibs Lecture 2
http://slidepdf.com/reader/full/vibs-lecture-2 12/16
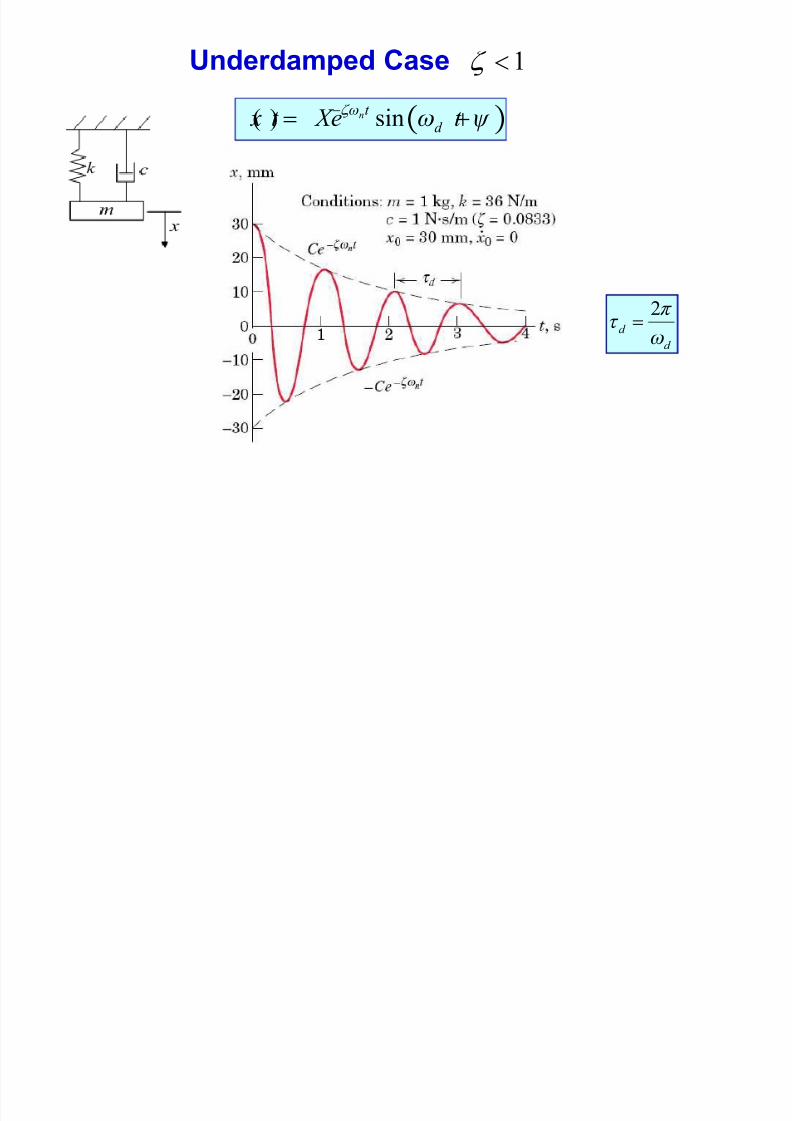
Underdamped Case 1^
( ) sinnt
d x t Xe t
^ [[ ]
!
2d
d
T X
[ !

8/7/2019 Vibs Lecture 2
http://slidepdf.com/reader/full/vibs-lecture-2 13/16
Underdamped Case:
Observ e motion, ext r act system parameters
1
2
11
2 2
sin
sin
n
n
t
d
t
d
Xe t x
x Xe t
^ [
^ [
[ ]
[ ]
!
Experiment: Apply initial disturbance and measure response
Look at successive peak values at times t1 and t2=t1+X d
2 1 1sin sin 2 sin
d d d t t t [ ] [ T ] [ ] ! !
1
2 22
2 2ln
1 1n d n
n
x
x
T T ̂ H ^ [ X ^ [
[ ^ ^ ! ! ! !
³Logarithmic Decrement´:
1
1
1
2
n
n d
n d
t
t
x ee
x e
^ [^ [ X
^ [ X
! !
22
)2( T H
H ^
!
21
2
^ X
T [
!
d
n
8/7/2019 Vibs Lecture 2
http://slidepdf.com/reader/full/vibs-lecture-2 14/16
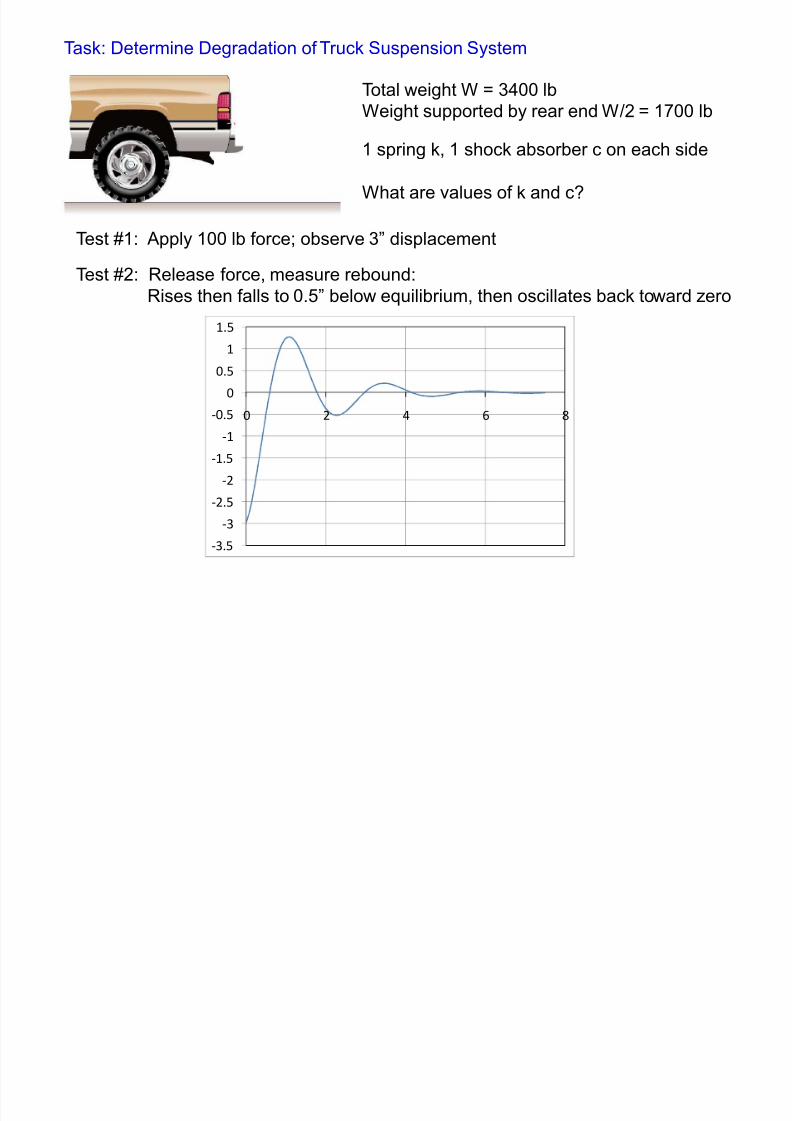
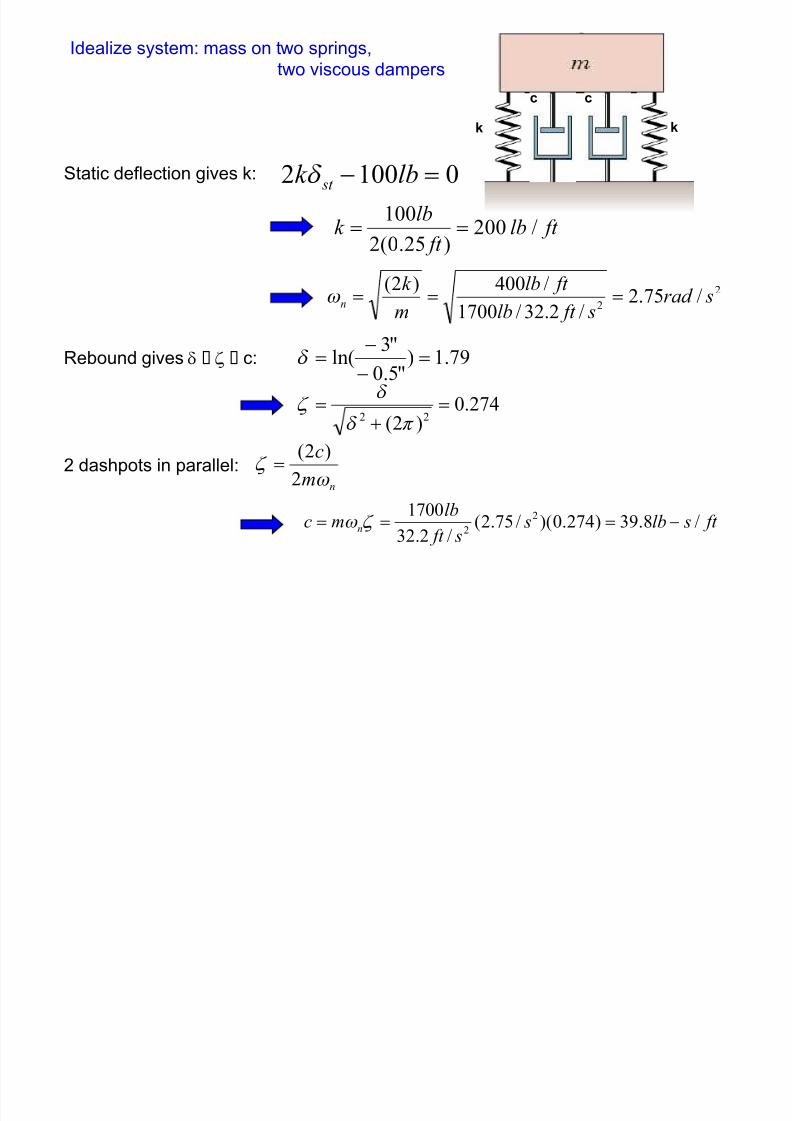
Total weight W = 3400 lb
Weight supported by rear end W/2 = 1700 lb
Test #1: Apply 100 lb force; observe 3´ displacement
Test #2: Release force, measure rebound:
Rises then falls to 0.5´ below equilibrium, then oscillates back toward zero
1 spring k, 1 shock absorber c on each side
What are values of k and c?
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
0 2 4 6 8
Task: Determine Degradation of Truck Suspension System
8/7/2019 Vibs Lecture 2
http://slidepdf.com/reader/full/vibs-lecture-2 15/16
k
c c
k
Idealize system: mass on two springs,
two viscous dampers
Static deflection gives k: 01002 ! lbk st H
100200 /
2(0.25 )
lbk lb ft
ft ! !
2
2/75.2
/2.32/1700
/400)2( srad
s ft lb
ft lb
m
k n !!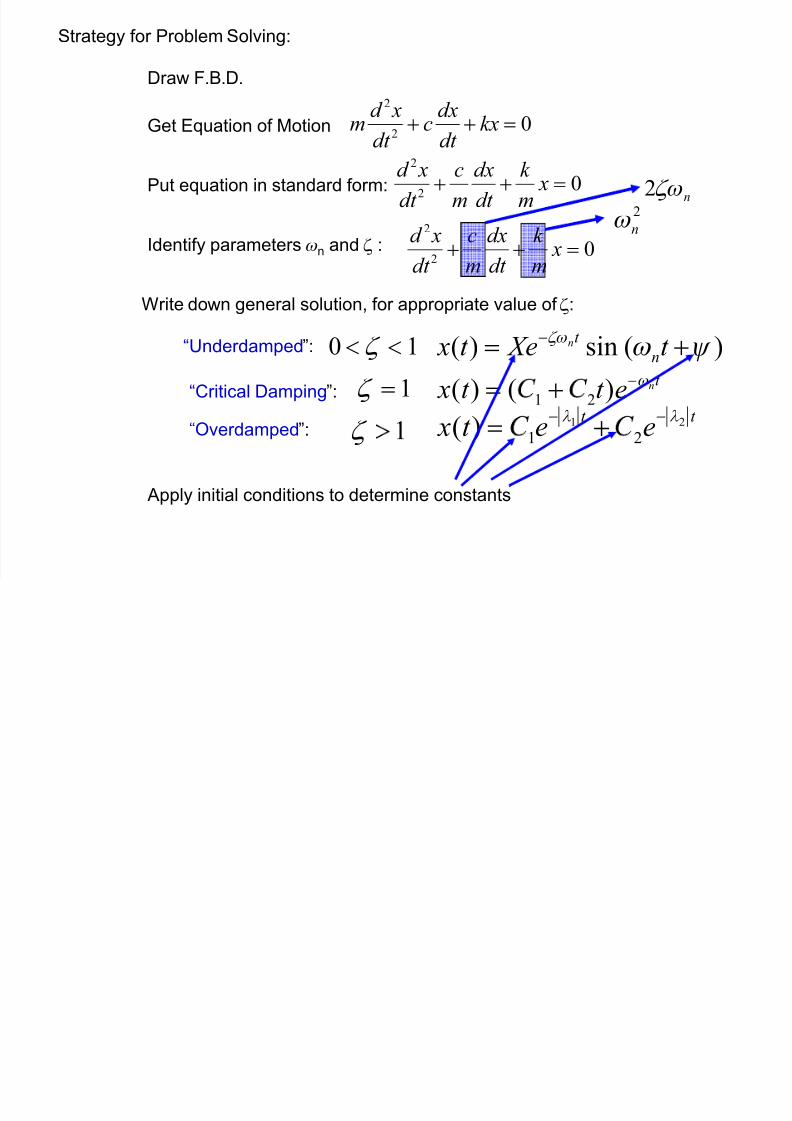
8/7/2019 Vibs Lecture 2
http://slidepdf.com/reader/full/vibs-lecture-2 16/16
Strategy for Problem Solving:
2
n[
Apply initial conditions to determine constants
Draw F.B.D.
2
2 0
d x dx
m ck xdt dt !Get Equation of Motion
2
2
0d x c dx k
xdt m dt m
!Identify parameters [n and ^ :
Write down general solution, for appropriate value of ^:
Put equation in standard form:
2
20
d x c dx k x
dt m dt m !
n^ [ 2
)(sin)( ] [^ [
!
t Xet x n
t n³Underdamped´: 10 ^
³Critical Damping´: 1!^ t n
et t x[
! )()( 21
³Overdamped´: 1^ t t
eet x 21
21)(PP
!