viewing (perspective) the graphics · pdf file–history of computer graphics ......
TRANSCRIPT

© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11 1
CS4620/5620: Lecture 11
Viewing (Perspective)The Graphics Pipeline
© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
Announcements
• Friday– History of Computer Graphics
• Wednesday– HW 1 is due– PPA 1 is out
2

© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
Pipeline of transformations
• Standard sequence of transforms
3
!
!
!
!
!
!
!
!
7.1. Viewing Transformations 147
object space
world space
camera space
canonicalview volume
scre
en
sp
ace
modelingtransformation
viewporttransformation
projectiontransformation
cameratransformation
Figure 7.2. The sequence of spaces and transformations that gets objects from their
original coordinates into screen space.
space) to camera coordinates or places them in camera space. The projection
transformation moves points from camera space to the canonical view volume.
Finally, the viewport transformation maps the canonical view volume to screen Other names: camera
space is also “eye space”
and the camera
transformation is
sometimes the “viewing
transformation;” the
canonical view volume is
also “clip space” or
“normalized device
coordinates;” screen space
is also “pixel coordinates.”
space.
Each of these transformations is individually quite simple. We’ll discuss them
in detail for the orthographic case beginning with the viewport transformation,
then cover the changes required to support perspective projection.
7.1.1 The Viewport Transformation
We begin with a problemwhose solution will be reused for any viewing condition.
We assume that the geometry we want to view is in the canonical view volume The word “canonical” crops
up again—it means
something arbitrarily
chosen for convenience.
For instance, the unit circle
could be called the
“canonical circle.”
and we wish to view it with an orthographic camera looking in the !z direction.The canonical view volume is the cube containing all 3D points whose Cartesian
coordinates are between !1 and +1—that is, (x, y, z) " [!1, 1]3 (Figure 7.3).We project x = !1 to the left side of the screen, x = +1 to the right side of thescreen, y = !1 to the bottom of the screen, and y = +1 to the top of the screen.
Recall the conventions for pixel coordinates fromChapter 3: each pixel “owns”
a unit square centered at integer coordinates; the image boundaries have a half-
unit overshoot from the pixel centers; and the smallest pixel center coordinates
© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
Orthographic transformation chain
• Start with coordinates in object’s local coordinates• Transform into world coords (modeling transform, Mm)
• Transform into eye coords (camera xf., Mcam = Fc–1)
• Orthographic projection, Morth
• Viewport transform, Mvp
4
⇤
⌥⌥⇧
xs
ys
zc
1
⌅
��⌃ =
⇤
⌥⌥⇧
nx2 0 0 nx�1
2
0 ny
2 0 ny�12
0 0 1 00 0 0 1
⌅
��⌃
⇤
⌥⌥⇧
2r�l 0 0 � r+l
r�l
0 2t�b 0 � t+b
t�b
0 0 2n�f �n+f
n�f
0 0 0 1
⌅
��⌃
�u v w e0 0 0 1
⇥�1
Mm
⇤
⌥⌥⇧
xo
yo
zo
1
⌅
��⌃
ps = MvpMorthMcamMmpo
© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
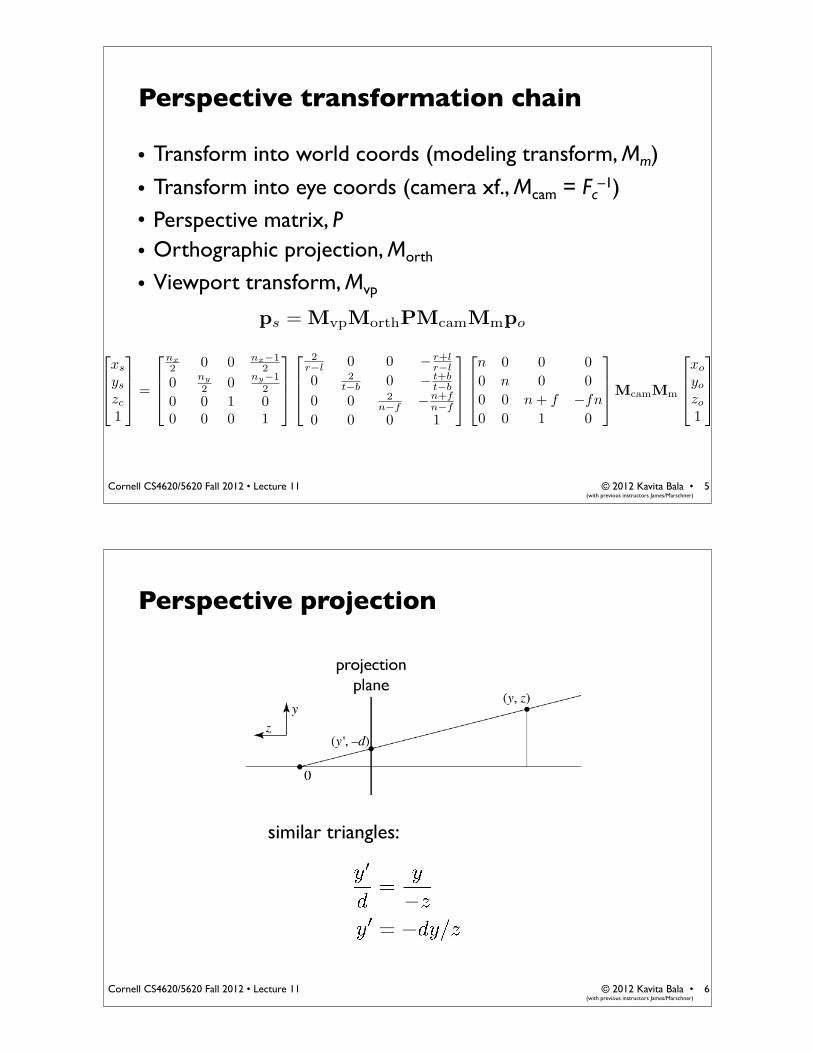
Perspective transformation chain
• Transform into world coords (modeling transform, Mm)
• Transform into eye coords (camera xf., Mcam = Fc–1)
• Perspective matrix, P• Orthographic projection, Morth
• Viewport transform, Mvp
5
ps = MvpMorthPMcamMmpo
�
⇧⇧⇤
xs
ys
zc
1
⇥
⌃⌃⌅ =
�
⇧⇧⇤
nx2 0 0 nx�1
2
0 ny
2 0 ny�12
0 0 1 00 0 0 1
⇥
⌃⌃⌅
�
⇧⇧⇤
2r�l 0 0 � r+l
r�l
0 2t�b 0 � t+b
t�b
0 0 2n�f �n+f
n�f
0 0 0 1
⇥
⌃⌃⌅
�
⇧⇧⇤
n 0 0 00 n 0 00 0 n + f �fn0 0 1 0
⇥
⌃⌃⌅McamMm
�
⇧⇧⇤
xo
yo
zo
1
⇥
⌃⌃⌅
© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
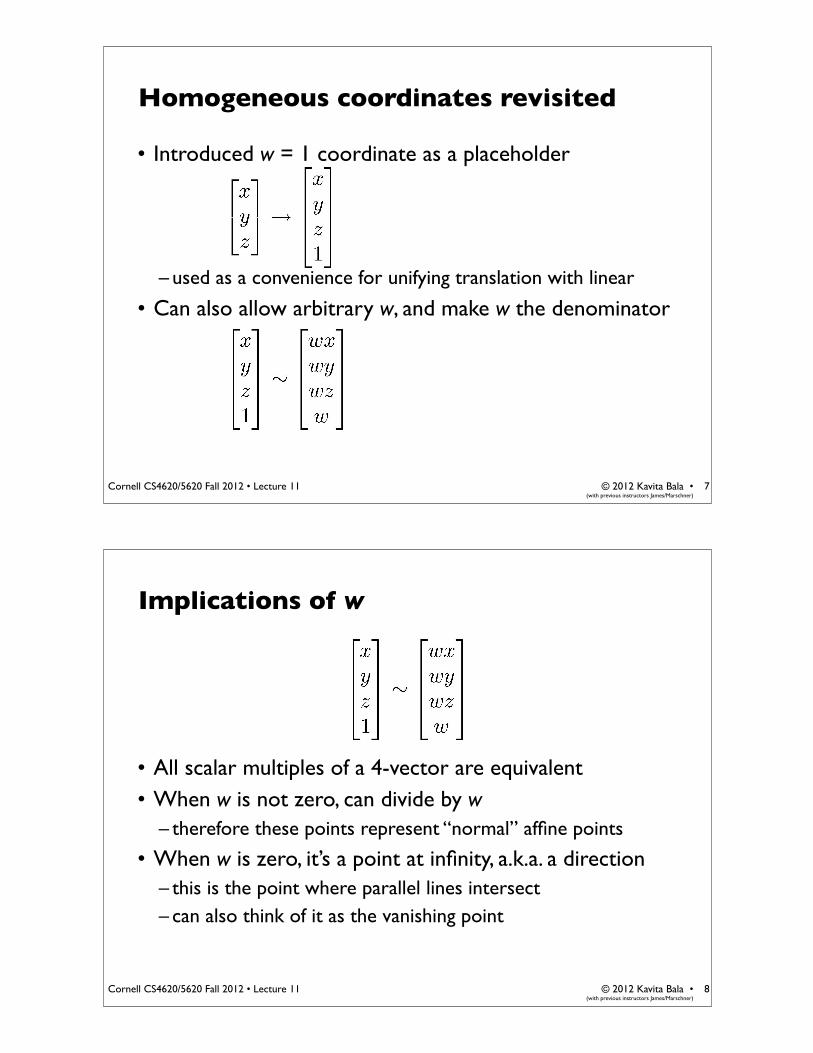
Perspective projection
similar triangles:
6
© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
Homogeneous coordinates revisited
• Introduced w = 1 coordinate as a placeholder
– used as a convenience for unifying translation with linear
• Can also allow arbitrary w, and make w the denominator
7
© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
Implications of w
• All scalar multiples of a 4-vector are equivalent• When w is not zero, can divide by w
– therefore these points represent “normal” affine points
• When w is zero, it’s a point at infinity, a.k.a. a direction– this is the point where parallel lines intersect– can also think of it as the vanishing point
8

© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11 9
Mas
acci
o, T
rini
ty, F
lore
nce
© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
Projective Plane
• When W is not 0, the point represented is (X/W, Y/W) in the Euclidean plane
• When W is 0, the point represented is a point at infinity (direction)
• Note that the triple (0, 0, 0) is omitted and does not represent any point
• The origin is represented by (0, 0, 1)
10

© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
Perspective projection
to implement perspective, just move z to w:
11
© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
View volume: perspective
12

© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
View volume: perspective (clipped)
13
© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
Carrying depth through perspective
• Perspective has a varying denominator—can’t preserve depth!• Compromise: preserve depth on near and far planes
– that is, choose a and b so that z’(n) = n and z’(f) = f.
14

© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
Official perspective matrix
• Use near plane distance as the projection distance– i.e., d = –n
• Scale by –1 to have fewer minus signs– scaling the matrix does not change the projective
transformation
15
P =
�
⇧⇧⇤
n 0 0 00 n 0 00 0 n + f �fn0 0 1 0
⇥
⌃⌃⌅
© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
Perspective projection matrix
• Product of perspective matrix with orth. projection matrix
16
Mper = MorthP
=
�
⇧⇧⇧⇤
2r�l 0 0 � r+l
r�l
0 2t�b 0 � t+b
t�b
0 0 2n�f �n+f
n�f
0 0 0 1
⇥
⌃⌃⌃⌅
�
⇧⇧⇤
n 0 0 00 n 0 00 0 n + f �fn0 0 1 0
⇥
⌃⌃⌅
=
�
⇧⇧⇧⇧⇤
2nr�l 0 l+r
l�r 0
0 2nt�b
b+tb�t 0
0 0 f+nn�f
2fnf�n
0 0 1 0
⇥
⌃⌃⌃⌃⌅

© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
Perspective transformation chain
• Transform into world coords (modeling transform, Mm)
• Transform into eye coords (camera xf., Mcam = Fc–1)
• Perspective matrix, P• Orthographic projection, Morth
• Viewport transform, Mvp
17
ps = MvpMorthPMcamMmpo
�
⇧⇧⇤
xs
ys
zc
1
⇥
⌃⌃⌅ =
�
⇧⇧⇤
nx2 0 0 nx�1
2
0 ny
2 0 ny�12
0 0 1 00 0 0 1
⇥
⌃⌃⌅
�
⇧⇧⇤
2r�l 0 0 � r+l
r�l
0 2t�b 0 � t+b
t�b
0 0 2n�f �n+f
n�f
0 0 0 1
⇥
⌃⌃⌅
�
⇧⇧⇤
n 0 0 00 n 0 00 0 n + f �fn0 0 1 0
⇥
⌃⌃⌅McamMm
�
⇧⇧⇤
xo
yo
zo
1
⇥
⌃⌃⌅
© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
OpenGL view frustum: orthographic
Note OpenGL puts the near and far planes at –n and –fso that the user can give positive numbers
18

© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
OpenGL view frustum: perspective
Note OpenGL puts the near and far planes at –n and –fso that the user can give positive numbers
19
© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
Pipeline of transformations
• Standard sequence of transforms
20
!
!
!
!
!
!
!
!
7.1. Viewing Transformations 147
object space
world space
camera space
canonicalview volume
scre
en
sp
ace
modelingtransformation
viewporttransformation
projectiontransformation
cameratransformation
Figure 7.2. The sequence of spaces and transformations that gets objects from their
original coordinates into screen space.
space) to camera coordinates or places them in camera space. The projection
transformation moves points from camera space to the canonical view volume.
Finally, the viewport transformation maps the canonical view volume to screen Other names: camera
space is also “eye space”
and the camera
transformation is
sometimes the “viewing
transformation;” the
canonical view volume is
also “clip space” or
“normalized device
coordinates;” screen space
is also “pixel coordinates.”
space.
Each of these transformations is individually quite simple. We’ll discuss them
in detail for the orthographic case beginning with the viewport transformation,
then cover the changes required to support perspective projection.
7.1.1 The Viewport Transformation
We begin with a problemwhose solution will be reused for any viewing condition.
We assume that the geometry we want to view is in the canonical view volume The word “canonical” crops
up again—it means
something arbitrarily
chosen for convenience.
For instance, the unit circle
could be called the
“canonical circle.”
and we wish to view it with an orthographic camera looking in the !z direction.The canonical view volume is the cube containing all 3D points whose Cartesian
coordinates are between !1 and +1—that is, (x, y, z) " [!1, 1]3 (Figure 7.3).We project x = !1 to the left side of the screen, x = +1 to the right side of thescreen, y = !1 to the bottom of the screen, and y = +1 to the top of the screen.
Recall the conventions for pixel coordinates fromChapter 3: each pixel “owns”
a unit square centered at integer coordinates; the image boundaries have a half-
unit overshoot from the pixel centers; and the smallest pixel center coordinates

© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11 21
CS4620/5620
Pipeline
© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
The graphics pipeline
• The standard approach to object-order graphics• Many versions exist
– software, e.g. Pixar’s REYES architecture• many options for quality and flexibility
– hardware, e.g. graphics cards in PCs• amazing performance: millions of triangles per frame
• We’ll focus on an abstract version of hardware pipeline
22

© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
The graphics pipeline
• “Pipeline” because of the many stages– very parallelizable– leads to remarkable performance of graphics cards (many times
the flops of the CPU at ~1/3 the clock speed)– gigaflops (10 to the 9th power), teraflop (12th power), petaflops
(15th power)
• GeForce GTX690, 915MHz, 2x1536 stream processors
23
© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
Supercomputers
• Tesla K10– Peak performance
• 4577 Gigaflops• 3072 cores (1536/GPU)
• Tianhe-1A, Tesla: 14,336 Xeon + 7,1688 Tesla boards – 448 cores (2 petaflops)
• Current supercomputer– IBM Sequoia (petascale) Blue Gene (16 petaflops)
24

© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
Primitives• Points• Line segments
– and chains of connected line segments
• Triangles• And that’s all!
– Curves? Approximate them with chains of line segments– Polygons? Break them up into triangles– Curved regions? Approximate them with triangles
• Hardware desire: minimal primitives– simple, uniform, repetitive: good for parallelism– and of course, cyclical; now you can send curves, and the vertex
shader will convert to primitives25
© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
Rasterization
• First job: enumerate the pixels covered by a primitive– simple, aliased definition: pixels whose centers fall inside
• Second job: interpolate values across the primitive– e.g. colors computed at vertices– e.g. normals at vertices– will see applications later on
26

© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
Rasterizing lines
• Define line as a rectangle
• Specify by two endpoints
• Ideal image: black inside, white outside
27
© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
Point sampling
• Approximate rectangle by drawing all pixels whose centers fall within the line
• Problem: sometimes turns on adjacent pixels
28

© 2012 Kavita Bala •(with previous instructors James/Marschner)
Cornell CS4620/5620 Fall 2012 • Lecture 11
Point samplingin action
29