vlt serie 2800 Índice introducción al vlt 2800 - …® 2800/design guide... · vlt® serie 2800...
TRANSCRIPT

VLT® Serie 2800
■ Índice
Introducción al VLT 2800 .............................................................................. 3Softwareversion ....................................................................................................... 3Advertencia general ................................................................................................. 4Estas reglas se relacionan con su seguridad ......................................................... 4Advertencia contra arranque no deseado ............................................................... 4Tecnología ................................................................................................................ 5Marca CE ................................................................................................................. 7Formulario de pedido ............................................................................................... 8Números de código para VLT 2800 200-240 V .................................................... 16Números de código para VLT 2800 380-480 V .................................................... 18Formulario de pedido ............................................................................................. 20Software de PC .................................................................................................... 21Software para PC y comunicación serie ............................................................... 21Accesorios para VLT 2800 .................................................................................... 22Unidad de control .................................................................................................. 30Inicialización manual .............................................................................................. 30Manual y automático ............................................................................................. 31Adaptación automática del motor .......................................................................... 32Unidad de controlLCP2, opción ............................................................................. 33Selección de parámetros ....................................................................................... 37
Instalación .......................................................................................................... 39Dimensiones mecánicas ........................................................................................ 39Instalaciónmecánica .............................................................................................. 41Información general sobre la instalación eléctrica ................................................ 43Instalación eléctrica correcta en cuantoaEMC ...................................................... 45Conexión a tierra de cables de control apantallados/blindados ........................... 47Diagrama ............................................................................................................... 48Instalación eléctrica ............................................................................................... 49Abrazadera de seguridad ...................................................................................... 52Fusiblesprevios ...................................................................................................... 52Conexiónde red ..................................................................................................... 52Conexión del motor ............................................................................................... 52Sentido de giro de motor ....................................................................................... 53Conexión en paralelo de motores ......................................................................... 53Cables de motor .................................................................................................... 53Protección térmicadel motor .................................................................................. 54Conexión del freno ................................................................................................ 54Conexióna tierra .................................................................................................... 54Carga compartida .................................................................................................. 54Control de freno mecánico .................................................................................... 54Acceso a terminales de control ............................................................................. 55Instalacióneléctrica, cables de control ................................................................... 55Instalación eléctrica,terminales de control ............................................................ 57Conexión de relés .................................................................................................. 57VLTSoftwareDialog ................................................................................................ 57Ejemplos de conexion ........................................................................................... 59
Programación .................................................................................................... 63Funcionamiento y Display ..................................................................................... 63Configuración de ajustes ....................................................................................... 63
MG.28.E5.05 - VLT es una marca registrada de Danfoss 1
VLT® Serie 2800
Carga y Motor ........................................................................................................ 71Frenado de CC ...................................................................................................... 75Referencias y límites ............................................................................................. 81Manejo de referencias ........................................................................................... 82Tipo de referencia .................................................................................................. 85Señales de entrada y de salida ............................................................................. 90Funciones especiales .......................................................................................... 100Funciones de PID ................................................................................................ 103Manejo de realimentación ................................................................................... 104Comunicación serie para el VLT 2800 ................................................................ 112Códigos de controlsegún el protocolo FC ........................................................... 118Códigos de estado según el protocolo FC .......................................................... 120Códigos de control según el protocolo Profidrive ............................................... 122Códigos de estado según el protocolo Profidrive ............................................... 123Comunicación serie ............................................................................................. 126Funciones técnicas .............................................................................................. 133
Todo acerca del VLT 2800 ........................................................................ 138Condiciones especiales ....................................................................................... 138Aislamientogalvánico (PELV) ............................................................................... 138Corrientede fuga a tierra y relés RCD. ................................................................ 138Condiciones de funcionamientoextremas ............................................................ 138Relación du/dt en el motor .................................................................................. 139Conmutación en la entrada ................................................................................. 139Ruido acústico ..................................................................................................... 139Frecuencia de conmut. dependiente de temperatura ......................................... 140Reducción de potencia debido a la presiónatmosférica ..................................... 140Reducción de potencia debido a funcionamiento avelocidad lenta .................... 140Reducción de potencia por cables de motor largos ........................................... 140Vibración y golpes ............................................................................................... 141Humedad atmosférica .......................................................................................... 141Estándar UL ........................................................................................................ 141Rendimiento ......................................................................................................... 141Interferencia de la red de alimentación/armónicos ............................................. 142Factor de potencia ............................................................................................... 142Normas de EMC/de productos genéricas ........................................................... 143Emisionesde EMC ............................................................................................... 143Inmunidad de EMC .............................................................................................. 144Lectura deldisplay ................................................................................................ 147Advertencias/mensajes de alarma ...................................................................... 147Códigos de advertencia, códigosde estado ampliados y códigos de alarma .... 152Datos técnicos generales .................................................................................... 153Datos técnicos, alimentaciónde red 1 x 220- 240 V / 3 x 200 -240 V ............... 157Datos técnicos, alimentaciónde red 3 x 380- 480 V ........................................... 158Otra documentación ............................................................................................ 159Suministrado con la unidad ................................................................................. 159Ajuste de fábrica .................................................................................................. 160
MG.28.E5.05 - VLT es una marca registrada de Danfoss2

VLT® Serie 2800
■ Softwareversion
195N
A02
1.15
VLT Serie 2800
Guía de DiseñoVersión de software: 2.3x
Este guía de Diseño puede emplearse para todos losconvertidores de frecuencia VLT Serie 2800 que incorporenla versión de software 2.3x. El número de dicha versiónpuede verse en el parámetro 640, Número de versión desoftware.
¡NOTA!:Este símbolo indicauna observación importante para el lector.
Indica una advertencia de tipo general.
Este símboloindica una advertencia de alta tensión.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 3
Intr
od
ucci
ón
alV
LT28
00

VLT® Serie 2800
■ Advertencia general
La tensión del convertidor de frecuen-cia es peligrosa cuando el equipo estáconectado a la alimentación de red. La
instalación incorrecta del motor o del convertidor defrecuencia puede producir daños al equipo, lesionesfísicas graves o la muerte. En consecuencia, esnecesario cumplir las instrucciones de este manual,además de las normas y reglamentos de seguridadnacionales y locales.
■ Estas reglas se relacionan con su seguridad1. El convertidor de frecuencia debe desconectarse
de la alimentación de red si es necesario realizaractividades de reparación. Compruebe que hadesconectado el suministro eléctrico y que hatranscurrido el tiempo necesario antes de retirarlos enchufes del motor y de red.
2. La tecla [STOP/RESET] en el panel de controldel convertidor de frecuencia no desconecta elequipo de la alimentación de red, por lo que nodebe utilizarse como un interruptor de seguridad.
3. La unidad debe estar correctamente conectada atierra, el usuario debe estar protegido contra latensión de red, y el motor debe estar protegidocontra sobrecargas de acuerdo con losreglamentos locales y nacionales en vigor.
4. La corriente de fuga a tierra es superior a 3,5 mA.5. La protección contra sobrecargas del motor no
está incluida en el ajuste de fábrica. Si se re-quiere esta función, ajuste el parámetro 128Protección térmica del motor en el valor de datoDesconexión ETR o Advertencia ETR. ParaEE.UU.: Las funciones ETR proporcionan protec-
ción contra sobrecargas del motor de clase 20,conforme a NEC.
6. No retire los enchufes del motor y de la ali-mentación de red mientras el convertidor defrecuencia esté conectado al suministro eléctricoCompruebe que ha desconectado el suministroeléctrico y que ha transcurrido el tiempo nece-sario antes de retirar los enchufes del motor y dered.
7. Tenga presente que el convertidor tiene otras en-tradas de tensión además de L1, L2 y L3 cuandose utilizan los terminales CC de bus. Compruebeque se han desconectado todas las entradas detensión y que ha transcurrido el tiempo necesarioantes de empezar las actividades de reparación.
■ Advertencia contra arranque no deseado1. El motor puede pararse mediante comandos digi-
tales, comandos de bus, referencias o paradalocal mientras el convertidor de frecuencia estéconectado a la alimentación eléctrica. Si la se-guridad de las personas requiere que no seproduzca un arranque accidental, estas funcionesde parada no son suficientes.
2. Durante la modificación de los parámetros, puedearrancar el motor. Por lo tanto, siempre debe es-tar activada la tecla de parada [STOP/RESET],después de lo cual pueden cambiarse los datos.
3. Un motor parado puede arrancar si ocurre unfallo en los componentes electrónicos del conver-tidor de frecuencia, o si desaparece unasobrecarga provisional, un fallo de la red eléctricao un fallo de la conexión del motor.
195NA139.10
Advertencia:Es muy peligroso tocar las partes eléctricas aunque sehaya desconectado la alimentación de red. Asegúresetambién de que las demás entradas de tensión se hayandesconectado, por ejemplo, de la carga compartida(circuito intermedio de CC compartido).
Para VLT 2800: espere 4 minutos como mínimo.
MG.28.E5.05 - VLT es una marca registrada de Danfoss4

VLT® Serie 2800
■ Tecnología
■ Principio de controlLos convertidores de frecuencia rectifican la tensiónde CA de la alimentación de red en tensión de CC,convirtiéndola otra vez en tensión de CA con ampli-tud y frecuencia variables.Así, el motor recibe una tensión y frecuencia vari-ables, lo que permite un control variable ilimitado dela velocidad de motores trifásicos estándar de CA.
1. Tensión de red1 x 220 - 240 V CA, 50 / 60 Hz3 x 200 - 240 V CA, 50 / 60 Hz3 x 380 - 480 V CA, 50 / 60 Hz.
2. RectificadorPuente trifásico que rectifica la tensión de CA entensión de CC.
3. Tensión CC delcircuito intermedio �
= √2 x tensión de red [V].
4. Bobinas del circuito intermedioIgualan la intensidad del circuito intermedio y limitanla carga en la red eléctrica y los componentes (trans-formador de red, cables, fusibles y contactores).
5. Condensador del circuito intermedioIguala la tensión del circuito intermedio.
6. InversorConvierte la tensión de CC en tensión de CA y fre-cuencia variables.
7. Tensión del motorTensión de CA variable que depende de la tensiónde suministro.Frecuencia variable: 0,2 - 132 / 1 - 1000 Hz.
8. Tarjeta de controlAquí está el procesador que controla el inversor, quegenera el patrón de pulsos mediante el cual se con-vierte la tensión de CC en tensión de CA variablecon frecuencia variable.
■ Principio de control de VLT 2800Los convertidores de frecuencia son equipos elec-trónicos que realizan un control variable ilimitado delas RPM de motores de CA. El convertidor de fre-cuencia dirige la velocidad del motor al convertir latensión y frecuencia de la red eléctrica, por ejemplo,400 V / 50 Hz, en magnitudes variables. Hoy en día,los motores de CA controlados mediante conver-tidores de frecuencia son un elemento normal detodas las instalaciones automatizadas.Los convertidores VLT Serie 2800 tienen un sistemade control del inversor denominado VVC (control delvector de tensión). El sistema VVC controla un mo-tor de inducción energizándolo con una frecuenciavariable y una tensión adecuada para esa frecuen-cia. Si cambia la carga en el motor, también lo hacela energización y la velocidad. Por este motivo, la in-tensidad del motor se mide de manera continua, yse utiliza un modelo para calcular su requisito detensión y deslizamiento.
■ Entradas y salidas programables en los cuatroAjustesEn los convertidores VLT Serie 2800 se pueden pro-gramar las distintas entradas de control y salidas deseñal, y seleccionar para la mayoría de parámetroscuatro Ajustes definidos por el usuario. Es muy sen-cillo para el usuario programar las funcionesrequeridas por medio del panel de control o la co-municación serie.
■ Protector de redLos VLT Serie 2800 están protegidos contra los tran-sitorios que ocurren a veces en la red, por ejemplo,si hay acoplamiento con un sistema de compen-sación de fase, o se queman los fusibles al caerrayos.
La tensión nominal del motor y el par comleto sepueden mantener con aproximadamente una bajatensión del 10% en el suministro de red.
Todos los convertidores con tensión de 400 V deVLT Serie 2800 tienen bobinas en el circuito interme-dio, por lo que hay una reducida interferencia de losarmónicos en la red eléctrica. Esto da un adecuadofactor de potencia (intensidad de pico inferior), quereduce la carga en la instalación de red eléctrica.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 5
Intr
od
ucci
ón
alV
LT28
00

VLT® Serie 2800
■ Protecciones delconvertidorde frecuenciaLa medición de la intensidad en el circuito interme-dio es una protección idónea de los convertidoresVLT Serie 2800 en caso de cortocircuitos o fallos deconexión a tierra en la conexión del motor.El control constante de la intensidad del circuito in-termedio permite conmutar en la salida del motor,por ejemplo, con un contactor.El control eficiente del suministro de red eléctricahará que la unidad se pare si hay una caída de fase.De esta manera, el inversor y los condensadores enel circuito intermedio no se sobrecargan, lo que re-duciría significativamente la vida útil del convertidorde frecuencia.Los VLT Serie 2800 ofrecen de fábrica la protecciónde temperatura. Si hay una sobrecarga térmica,esta función de protección desconecta el inversor.
■ Aislamiento galvánicofiableEn los convertidores VLT 2800, todas las entradas ysalidas digitales, entradas y salidas analógicas y ter-minales de comunicación serie se suministranconectados a circuitos que cumplen los requisitos deaislamiento PELV. Los terminales de relé tambiéncumplen los requisitos de PELV, por lo que sepueden conectar al potencial de red.Para obtener más información, consulte la secciónAislamiento galvánico (PELV)
■ Protección avanzada delmotorLos convertidores VLT Serie 2800 tienen incorpo-rada la protección electrónica del motor.El convertidor de frecuencia calcula la temperaturadel motor a partir de la intensidad, la frecuencia y eltiempo transcurrido.A diferencia de la tradicional protección bimetálica,la protección electrónica tiene en cuenta el menorenfriamiento a bajas frecuencias causado por lamenor velocidad del ventilador (motores con venti-lador interno). Esta función no protege cada motorcuando éstos se conectan en paralelo. La protec-ción térmica es similar a un interruptor de seguridadCTI del motor.Para que el motor tenga la máxima protección con-tra el sobrecalentamiento cuando quede tapado obloqueado, o si falla el ventilador, puede instalar untermistor y conectarlo a la entrada de termistor delconvertidor (entrada digital), consulte el parámetro128 Protección térmica del motor.
Consulte también la sección Aislamiento galvánico(PELV) para obtener más información.
¡NOTA!:Esta función no protege los motores in-dividualmente si están conectados entre sí en
paralelo.
MG.28.E5.05 - VLT es una marca registrada de Danfoss6

VLT® Serie 2800
■ Marca CE¿Qué es la marca CE?El propósito de la marca CE es evitar los obstáculostécnicos al comercio entre la EFTA y la UE. La UEha introducido la marca CE como una manera sen-cilla de demostrar que un producto cumple lasdirectivas correspondientes de la Unión Europea. Lamarca CE no guarda relación con las especifica-ciones ni con la calidad de un producto. Losconvertidores de frecuencia están regulados por tresdirectivas de la UE:Directiva sobre máquinas (98/37/EEC)
Toda la maquinaria con partes móviles críticas estácubierta por la directiva sobre máquinas, vigentedesde el 1 de enero de 1995. Los convertidores defrecuencia son fundamentalmente equipos eléctri-cos, por lo que no están incluidos en la directivasobre máquinas. Sin embargo, si se suministra unconvertidor de frecuencia para utilizarlo con unamáquina, proporcionamos información sobre los as-pectos de seguridad relativos a dicho convertidor. Lohacemos mediante una declaración del fabricante.Directiva sobre baja tensión (73/23/EEC)
Los convertidores de frecuencia deben contar con lamarca CE según la directiva sobre baja tensión, vi-gente desde el 1 de enero de 1997. Esta directivaes aplicable a todos los equipos y aparatos eléctri-cos utilizados en el rango de tensión de 50 - 1000 VCA y 75 - 1500 V CC. Danfoss otorga la marca CEde acuerdo con esta directiva y emite unadeclaración de conformidad si se solicita.Directiva sobre EMC (89/336/EEC)
EMC es la abreviatura de compatibilidad electro-magnética. La presencia de compatibilidadelectromagnética significa que las interferencias mu-tuas entre los diferentes componentes/aparatos estan pequeña que el funcionamiento de los mismosno se ve afectado.La directiva sobre EMC entró en vigor el 1 de enerode 1996. Danfoss otorga la marca CE de acuerdocon esta directiva y emite una declaración deconformidad si se solicita. Este manual incluye in-strucciones de montaje detalladas para realizar lacorrecta instalación en cuanto a EMC. Además, es-pecificamos las normas que cumplen nuestrosdistintos productos. Ofrecemos filtros que puedenencontrarse en las especificaciones y propor-cionamos otros tipos de asistencia para asegurar unresultado óptimo de EMC.
En la mayoría de los casos, los profesionales delsector utilizan el convertidor de frecuencia como uncomponente complejo que forma parte de unaparato, sistema o instalación más grandes. Debetener en cuenta que la responsabilidad por las
propiedades finales en cuanto a EMC del aparato,sistema o instalación corresponde al instalador.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 7
Intr
od
ucci
ón
alV
LT28
00

VLT® Serie 2800
Esta sección facilita la especificación y el pedido deun VLT 2800.
Selección del convertidor de frecuenciaEl convertidor de frecuencia se elige partiendo de laintensidad del motor con la máxima carga en elsistema. La intensidad de salida nominal del conver-tidor de frecuencia, IINV debe ser igual o más altaque la intensidad requerida del motor.
Tensión de alimentaciónLa serie VLT 2800 está disponible en dos rangos detensión de red: 200-240 V y 380-480 V.
Seleccione si el convertidor debe recibir tensión dered de:- 1 x 220 - 240 V CA tensión monofásica- 3 x 200 - 240 V CA tensión trifásica- 3 x 380 -480 V CA tensión trifásica
1 x 220 - 240 V
Potencia de eje típicaPINV
Intensidad de salida máx.constante IINV
Potencia de salida máx. con-stante a 230 V SINV
Tipo [kW] [HP] [A] [kVA]2803 0,37 0,5 2,2 0,92805 0,55 0,75 3,2 1,32807 0,75 1 4,2 1,72811 1,1 1,5 6 2,42815 1,5 2 6,8 2,7
3 x 200 - 240 V
Potencia de eje típicaPINV
Intensidad de salida máx.constante IINV
Potencia de salida máx. con-stante a 230 V SINV
Tipo [kW] [HP] [A] [kVA]2803 0,37 0,5 2,2 0,92805 0,55 0,75 3,2 1,32807 0,75 1 4,2 1,72811 1,1 1,5 6 2,42815 1,5 2 6,8 2,72822 2,2 3 9,6 3,82840 3,7 5 16 6,4
MG.28.E5.05 - VLT es una marca registrada de Danfoss8

VLT® Serie 2800
3 x 380 -480 V
Potencia de eje típicaPINV
Intensidad de salida máx.constante IINV
Potencia de salida máx. con-stante a 400 V SINV
Tipo [kW] [HP] [A] [kVA]2805 0,55 0,75 1,7 1,12807 0,75 1 2,1 1,72811 1,1 1,5 3 22815 1,5 2 3,7 2,62822 2,2 3 5,2 3,62830 3 4 7 4,82840 4 5 9,1 6,32855 5,5 7,5 12 8,32875 7,5 10 16 11,12880 11 15 24 16,62881 15 20 32 22,22882 18,5 25 37,5 26
■ AlojamientoTodas las unidades VLT 2800 se suministran con unalojamiento IP 20 de manera estándar.Este nivel de alojamiento es idóneo para el montajeen paneles en aquellas áreas en que se requiere unalto nivel de protección; los alojamientos IP 20 tam-bién permiten la instalación lado a lado sinnecesidad de otros equipos de refrigeración.Las unidades de IP 20 se pueden actualizar aNEMA 1 si se instala una tapa de terminal. Consulteel número de código para la tapa de terminal en Ac-cesorios de VLT 2800.
Además, las unidades VLT 2880-82 se suministrancon un alojamiento Nema 1 de manera estándar.
■ FrenoLos convertidores VLT 2800 están disponibles con osin módulo de freno integrado. Consulte la seccióntitulada Resistencias de freno si desea adquirir unaresistencia de freno.
■ Filtro RFIVLT 2800 está disponible con o sin un filtro RFI 1Aintegrado. El filtro RFI 1A integrado cumple la normaEN 55011-1A relativa a EMC.
Con un filtro RFI integrado se cumple la norma EN55011-1B con un máximo de 15 metros de cableapantallado de motor en los convertidores VLT2803-2815 1 x 220-240 V.
VLT 2880-82 con filtro 1B integrado cumple la normaEN 50011 - 1B relativa a EMC
■ Filtro de armónicosLos armónicos no afectan directamente al consumoeléctrico, aunque aumentan las pérdidas de calor enla instalación (transformador, cables). Por ello, enlos sistemas con un porcentaje alto de carga rectifi-cada, es importante mantener los armónicos en unnivel bajo para evitar sobrecargar el transformador yuna alta temperatura de los cables. Para mantenerunos armónicos bajos, los convertidores VLT 2822 3x 200-240 V y VLT 2805-2882 380-480 V están pro-vistos de bobinas en el circuito intermedio de formaestándar. Esto reduce la intensidad de entrada IRMS
típicamente en un 40%.Tenga en cuenta que los convertidores 1 x 220-240V no se suministran con bobinas en el circuito inter-medio.
■ Protocolo FCLos convertidores de frecuencia VLT Danfosspueden realizar numerosas funciones en los sis-temas de control. Los convertidores de frecuenciase pueden integrar en un sistema de control global,y permiten transferir datos de proceso detalladosmediante la comunicación serie.El protocolo estándar se basa en un sistema de busRS 485 con una velocidad de transmisión máxima
MG.28.E5.05 - VLT es una marca registrada de Danfoss 9
Intr
od
ucci
ón
alV
LT28
00

VLT® Serie 2800
de 9600 baudios. Se admiten de fábrica los sigu-ientes perfiles Drive:- FC Drive, que es un perfil adaptado a Danfoss.- Profidrive, que admite el perfil Profidrive
Consulte Comunicación serie del VLT 2800 paramás información sobre las estructuras de telegramay los perfiles Drive.
■ FieldbusoptionLos requisitos de información cada vez mayores delsector industrial hacen que sea necesario recoger yvisualizar muchos datos de proceso distintos. Losdatos de proceso importantes ayudan a los técnicosde sistemas en el control diario de su sistema. Lagran cantidad de datos necesaria en los sistemas demayor tamaño hace deseable una velocidad detransmisión mayor de 9600 baudios.
ProfibusProfibus es un sistema de bus de campo que sepuede utilizar para enlazar dispositivos de automati-zación, como sensores y actuadores, con loscontroles por medio de un cable de dos hilosconductores. Profibus DP es un protocolo de comu-nicación muy rápido, creado especialmente para lacomunicación entre un sistema de automatización ydistintos tipos de equipos.Profibus es una marca registrada.
DeviceNetDeviceNet los sistemas de bus de campo se puedenutilizar para enlazar dispositivos de automatización,como sensores y actuadores, con los controles pormedio de un cable de dos hilos conductores.DeviceNet es un protocolo de comunicación develocidad media creado especialmente para la co-municación entre un sistema de automatización ydistintos tipos de equipos.Los convertidores con protocolo DeviceNet tambiénpueden controlarse mediante los protocolos FC yProfidrive.
Se puede utilizar VLT Software Dialog en el conectorSub D.
MG.28.E5.05 - VLT es una marca registrada de Danfoss10

VLT® Serie 2800
■ Bobinas delmotorSi se instala el módulo de bobina de motor entre elconvertidor VLT 2800 y el motor, se podrá utilizarhasta 200 metros de motor de cable no apantallado
o 100 metros de cable apantallado. El módulo debobina de motor tiene un alojamiento IP 20 y sepuede instalar lado a lado.
Datos técnicos para bobinas de motor del VLT 2803–2875Long. máx. de cable (no apantallado) 1) 200 mLong. máx. de cable (apantallado) 1) 100 mAlojamiento IP 20Intens. nominal máx. 1) 16 ATensión máx.1) 480 V CADistancia mín. entre el VLT y la bobina de motor Lado a ladoDistancia mín. encima y debajo de la bobina de motor 100 mmTamaño Al x An x F (mm) 200 x 90 x 152Peso 3,8 kg
1) Parámetro 411 Frecuencia de conmutación =4.500 Hz.
Consulte el código de pedido del módulo de bobinade motor en Accesorios de VLT 2800.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 11
Intr
od
ucci
ón
alV
LT28
00

VLT® Serie 2800
■ Filtro RFI1BTodos los convertidores de frecuencia causaránruido electromagnético en el suministro de redcuando estén en funcionamiento. Un filtro RFI (inter-ferencia de frecuencias de radio) reducirá este ruidoelectromagnético en el suministro eléctrico.Sin un filtro RFI, hay el riesgo de que el convertidorde frecuencia interfiera con otros componentes eléc-tricos conectados a la red eléctrica, que puedenfuncionar incorrectamente.
Si se instala un módulo de filtro RFI 1B entre elsuministro de red y el VLT 2800, el convertidor defrecuencia cumplirá la norma EN 55011-1B encuanto a EMC.
¡NOTA!:Para cumplir la norma EN 55011-1B, elmódulo de filtro RFI 1B debe instalarse en un
VLT 2800 que tenga un filtro RFI 1A integrado.
Datos técnicos del filtro RFI 1B del VLT 2803–2875Long.máx. de cable (apantallado) 200-240 V 100 m (En 1A: 100 m)Long. máx. de cable (apantallado) 380-480 V 25 m (En 1A: 50 m)Alojamiento IP 20Intens. nominal máx. 16 ATensión máx. 480 V CATensión máx. a tierra 300 V CADistancia mín. entre el VLT y el filtro RFI 1B Lado a ladoDistancia mín. encima y debajo del filtro RFI 1B 100 mmTamaño Al x An x F (mm) 200 x 60 x 87Peso 0,9 kg
Consulte el código de pedido del módulo de filtroRFI 1B en Accesorios de VLT 2800.
MG.28.E5.05 - VLT es una marca registrada de Danfoss12

VLT® Serie 2800
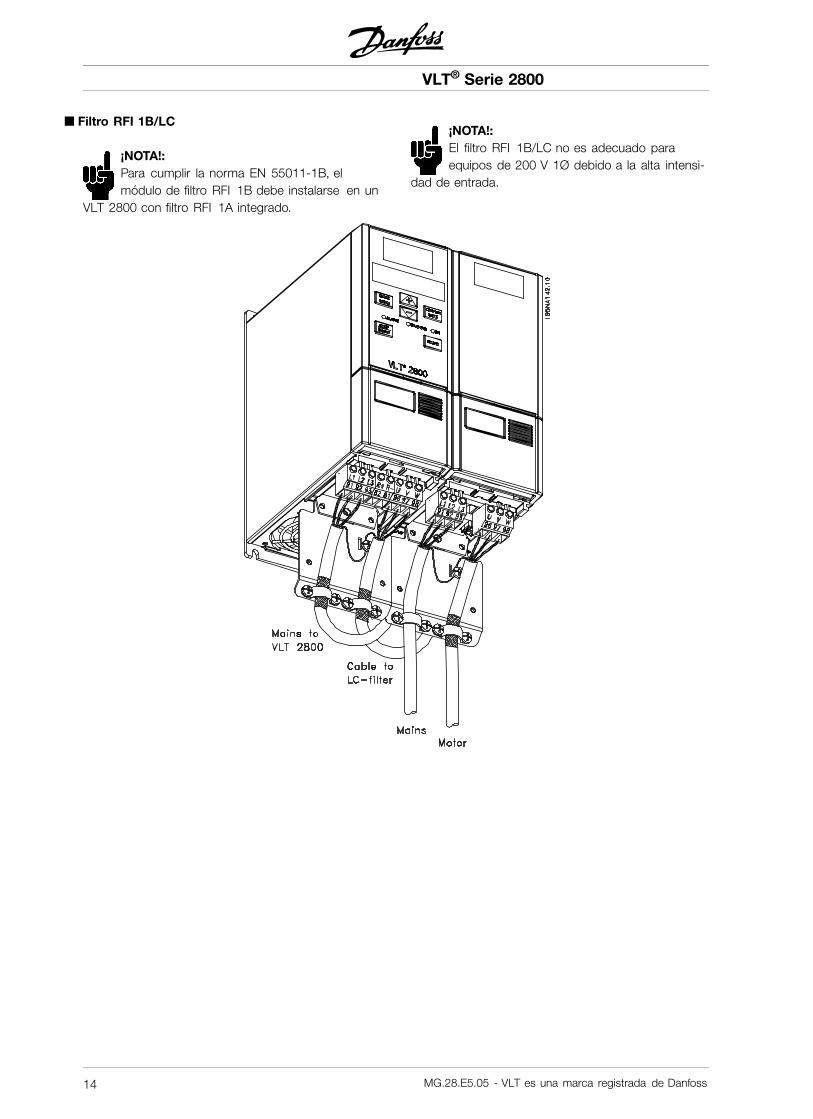
■ Filtro RFI 1B/LCEl filtro RFI 1B/LC contiene un módulo RFI quecumple EN 55011-1B y un filtro LC que reduce elruido acústico.
filtro LC
Cuando el motor se controle con un convertidor defrecuencia, se oirá en ocasiones el ruido acústicoproveniente del motor. El ruido, causado por el dis-eño del motor, se genera cada vez que se activauno de los contactos del inversor en el convertidorde frecuencia. La frecuencia del ruido acústico cor-respon derá, por lo tanto, a la frecuencia deconexión del convertidor.
El filtro reduce el tiempo de du/dt de la tensión, latensión pico Upico y la corriente de rizado�I en elmotor, de forma que la intensidad y la tension ten-dran una forma casi senoidal. De esta manera, sereduce al mínimo el ruido acústico del motor.
Debido a las corrientes de rizado en las bobinas, és-tas emiten algo de ruido. El problema se solucionainstalando el filtro dentro de una carcasa o similar.
Danfoss puede suministrar un filtro LC para los VLTSerie 2800, que amortigua el ruido acústico del mo-tor. Antes de empezar a utilizar los filtros esnecesario asegurarse de lo siguiente:- se cumple la intensidad nominal- la tensión de red es 200-480 V- El parámetro 412 Frec. conmutación dependiente
de frecuen. salida</ emphasis> está ajustado enFiltro LC instalado [3]
- la frecuencia de salida es 120 Hz máx.
Consulte el dibujo en la siguiente página.
Instalación de un termistor (PTC)El filtro RFI 1B/LC tiene un termistor integrado(PTC) que se activa si se produce una temperaturaexcesiva. El convertidor de frecuencia se puede pro-gramar para detener el motor y activar una alarmamediante una salida de relé o una salida digital siestá activado el termistor.
El termistor se conecta entre el terminal 50 (+10V) yuna de las entradas digitales 18, 19, 27 y 29.En el parámetro 128 Protección térmica del motorAdvertencia del termistor [1] o Desconexión del ter-mistor [2] se pueden seleccionarEl termistor se conecta de la siguiente manera:
MG.28.E5.05 - VLT es una marca registrada de Danfoss 13
Intr
od
ucci
ón
alV
LT28
00
VLT® Serie 2800
■ Filtro RFI 1B/LC
¡NOTA!:Para cumplir la norma EN 55011-1B, elmódulo de filtro RFI 1B debe instalarse en un
VLT 2800 con filtro RFI 1A integrado.
¡NOTA!:El filtro RFI 1B/LC no es adecuado paraequipos de 200 V 1Ø debido a la alta intensi-
dad de entrada.
MG.28.E5.05 - VLT es una marca registrada de Danfoss14

VLT® Serie 2800
Datos técnicos del filtro RFI 1B/LC del VLT2803–2840Long. máx. de cable (apantallado) 380-480 V 25 m (En 1A: 50 m)Alojamiento IP 20Intens. nominal máx. 4 (Nº de código: 195N3100); 9,1 (Nº de código:
195N3101)Tensión máx. 480 V CATensión máx. a tierra 300 V CADistancia mín. entre el VLT y el filtro RFI 1B/LC Lado a ladoDistancia mín. encima y debajo del filtro RFI 1B/LC 100 mmTamaño 195N3100 4.0 A Al x An x F (mm) 200 x 75 x 168Tamaño 195N3101 9,1 A Al x An x F (mm) 267,5 x 90 x 168Peso 195N3100 4 A 2,4 kgPeso 195N3101 9,1 A 4 kg
■ Unidad de controlLos convertidores VLT 2800 se suministran siemprecon un panel de control integrado.Todos los displays son LED de seis dígitos con posi-bilidad de mostrar un elemento de datos defuncionamiento continuamente durante el fun-cionamiento normal. Como suplemento al display,hay tres luces indicadoras de la tensión (ON), adver-tencias (WARNING) y alarmas (ALARM). La mayoríade ajustes de parámetro del convertidor de frecuen-cia pueden cambiarse inmediatamente mediante elpanel de control integrado.
Hay disponible como opción un panel de controlLCP2 que se conecta con un enchufe a la parte de-lantera del convertidor. El panel de control LCP2 sepuede instalar alejado hasta 3 metros del conver-tidor, por ejemplo, en un panel delantero, medianteel kit de montaje que se adjunta con el mismo.Todos los datos se indican por medio de un displayalfanumérico de 4 líneas, que puede mostrar nor-malmente hasta 4 elementos de dato y 3 modos defuncionamiento de manera continua. Durante laprogramación, se mostrará toda la información re-querida para el ajuste rápido y efectivo de losparámetros del convertidor de frecuencia. Como su-plemento al display, hay tres luces indicadoras de latensión (ON), advertencias (WARNING) y alarmas(ALARM). La mayoría de ajustes de parámetro delconvertidor de frecuencia pueden cambiarse inmedi-atamente mediante el panel de control LCP2.Consulte también la sección titulada Panel de con-trol LCP2en la Guía de Diseño.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 15
Intr
od
ucci
ón
alV
LT28
00

VLT® Serie 2800
■ Números de código para VLT 2800 200-240 V
0,37 kW VLT 2803 1/3 x 200-240 V
RFI Unidad Profibus
DP
DeviceNet N� de código
- ST - - 195N0001
- SB - - 195N0002
R1 ST - - 195N0003
R1 SB - - 195N0004
- ST X - 195N0005
- SB X - 195N0006
R1 ST X - 195N0007
R1 SB X - 195N0008
- ST - X 195N0009
- SB - X 195N0010
R1 ST - X 195N0011
R1 SB - X 195N0012
0,55 kW VLT 2805 1/3 x 200-240 V
RFI Unidad Profibus
DP
DeviceNet N� de código
- ST - - 195N0013
- SB - - 195N0014
R1 ST - - 195N0015
R1 SB - - 195N0016
- ST X - 195N0017
- SB X - 195N0018
R1 ST X - 195N0019
R1 SB X - 195N0020
- ST - X 195N0021
- SB - X 195N0022
R1 ST - X 195N0023
R1 SB - X 195N0024
0,75 kW VLT 2807 1/3 x 200-240 V
RFI Unidad Profibus DP DeviceNet N� de código
- ST - - 195N0025
- SB - - 195N0026
R1 ST - - 195N0027
R1 SB - - 195N0028
- ST X - 195N0029
- SB X - 195N0030
R1 ST X - 195N0031
R1 SB X - 195N0032
- ST - X 195N0033
- SB - X 195N0034
R1 ST - X 195N0035
R1 SB - X 195N0036
1,1 kW VLT 2811 1/3 x 200-240 V
RFI Unidad Profibus DP DeviceNet N� de código
- ST - - 195N0037
- SB - - 195N0038
R1 ST - - 195N0039
R1 SB - - 195N0040
- ST X - 195N0041
- SB X - 195N0042
R1 ST X - 195N0043
R1 SB X - 195N0044
- ST - X 195N0045
- SB - X 195N0046
R1 ST - X 195N0047
R1 SB - X 195N0048
1,5 kW VLT 2815 1/3 x 200-240 V
RFI Unidad Profibus DP DeviceNet N� de código
- ST - - 195N0049
- SB - - 195N0050
R1 ST - - 195N0051
R1 SB - - 195N0052
- ST X - 195N0053
- SB X - 195N0054
R1 ST X - 195N0055
R1 SB X - 195N0056
- ST - X 195N0057
- SB - X 195N0058
R1 ST - X 195N0059
R1 SB - X 195N0060
2,2 kW VLT 2822 3 x 200-240 V
RFI Unidad Profibus DP DeviceNet N� de código
- ST - - 195N0061
- SB - - 195N0062
R1 ST - - 195N0063
R1 SB - - 195N0064
- ST X - 195N0065
- SB X - 195N0066
R1 ST X - 195N0067
R1 SB X - 195N0068
- ST - X 195N0069
- SB - X 195N0070
R1 ST - X 195N0071
R1 SB - X 195N0072
MG.28.E5.05 - VLT es una marca registrada de Danfoss16

VLT® Serie 2800
3,7 kW VLT 2840 3 x 200-240 V
RFI Unidad Profibus DP DeviceNet N� de código
- ST - - 195N0073
- SB - - 195N0074
R1 ST - - 195N0075
R1 SB - - 195N0076
- ST X - 195N0077
- SB X - 195N0078
R1 ST X - 195N0079
R1 SB X - 195N0080
- ST - X 195N0081
- SB - X 195N0082
R1 ST - X 195N0083
R1 SB - X 195N0084
ST: Unidad estándar.SB: Unidad estándar con freno integrado.R1: Con filtro RFI que cumple EN 55011-1A.
¡NOTA!:Para los convertidores VLT 2803-2815220-con un filtro R1 sólo se puede conectar
tensión de red monofásica de 1 x 220 - 240 voltios.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 17
Intr
od
ucci
ón
alV
LT28
00

VLT® Serie 2800
■ Números de código para VLT 2800 380-480 V
0,55 kW VLT 2805 3 x 380-480 V
RFI Unidad Profibus DP DeviceNet Nº de código
- ST - - 195N1001
- SB - - 195N1002
R1 ST - - 195N1003
R1 SB - - 195N1004
- ST X - 195N1005
- SB X - 195N1006
R1 ST X - 195N1007
R1 SB X - 195N1008
- ST - X 195N1009
- SB - X 195N1010
R1 ST - X 195N1011
R1 SB - X 195N1012
0,75 kW VLT 2807 3 x 380-480 V
RFI Unidad Profibus DP DeviceNet Nº de código
- ST - - 195N1013
- SB - - 195N1014
R1 ST - - 195N1015
R1 SB - - 195N1016
- ST X - 195N1017
- SB X - 195N1018
R1 ST X - 195N1019
R1 SB X - 195N1020
- ST - X 195N1021
- SB - X 195N1022
R1 ST - X 195N1023
R1 SB - X 195N1024
1,1 kW VLT 2811 3 x 380-480 V
RFI Unidad Profibus DP DeviceNet Nº de código
- ST - - 195N1025
- SB - - 195N1026
R1 ST - - 195N1027
R1 SB - - 195N1028
- ST X - 195N1029
- SB X - 195N1030
R1 ST X - 195N1031
R1 SB X - 195N1032
- ST - X 195N1033
- SB - X 195N1034
R1 ST - X 195N1035
R1 SB - X 195N1036
1,5 kW VLT 2815 3 x 380-480 V
RFI Unidad Profibus DP DeviceNet Nº de código
- ST - - 195N1037
- SB - - 195N1038
R1 ST - - 195N1039
R1 SB - - 195N1040
- ST X - 195N1041
- SB X - 195N1042
R1 ST X - 195N1043
R1 SB X - 195N1044
- ST - X 195N1045
- SB - X 195N1046
R1 ST - X 195N1047
R1 SB - X 195N1048
2,2 kW VLT 2822 3 x 380-480 V
RFI Unidad Profibus DP DeviceNet Nº de código
- ST - - 195N1049
- SB - - 195N1050
R1 ST - - 195N1051
R1 SB - - 195N1052
- ST X - 195N1053
- SB X - 195N1054
R1 ST X - 195N1055
R1 SB X - 195N1056
- ST - X 195N1057
- SB - X 195N1058
R1 ST - X 195N1059
R1 SB - X 195N1060
3,0 kW VLT 2830 3 x 380-480 V
RFI Unidad Profibus DP DeviceNet Nº de código
- ST - - 195N1061
- SB - - 195N1062
R1 ST - - 195N1063
R1 SB - - 195N1064
- ST X - 195N1065
- SB X - 195N1066
R1 ST X - 195N1067
R1 SB X - 195N1068
- ST - X 195N1069
- SB - X 195N1070
R1 ST - X 195N1071
R1 SB - X 195N1072
MG.28.E5.05 - VLT es una marca registrada de Danfoss18

VLT® Serie 2800
4,0 kW VLT 2840 3 x 380-480 V
RFI Unidad Profibus DP DeviceNet Nº de código
- ST - - 195N1073
- SB - - 195N1074
R1 ST - - 195N1075
R1 SB - - 195N1076
- ST X - 195N1077
- SB X - 195N1078
R1 ST X - 195N1079
R1 SB X - 195N1080
- ST - X 195N1081
- SB - X 195N1082
R1 ST - X 195N1083
R1 SB - X 195N1084
ST: Unidad estándar.SB: Unidad estándar con freno integrado.R1: Con filtro RFI que cumple EN 55011-1A.
5,5 kW VLT 2855 3 x 380-480 V
RFI Unidad Profibus DP DeviceNet Nº de código
- ST - - 195N1085
- SB - - 195N1086
R1 ST - - 195N1087
R1 SB - - 195N1088
- ST X - 195N1089
- SB X - 195N1090
R1 ST X - 195N1091
R1 SB X - 195N1092
- ST - X 195N1093
- SB - X 195N1094
R1 ST - X 195N1095
R1 SB - X 195N1096
7,5 kW VLT 2875 3 x 380-480 V
RFI Unidad Profibus DP DeviceNet Nº de código
- ST - - 195N1097
- SB - - 195N1098
R1 ST - - 195N1099
R1 SB - - 195N1100
- ST X - 195N1101
- SB X - 195N1102
R1 ST X - 195N1103
R1 SB X - 195N1104
- ST - X 195N1105
- SB - X 195N1106
R1 ST - X 195N1107
R1 SB - X 195N1108
11 kW VLT 2880 3 x 380-480 V
RFI Unidad Profibus DP DeviceNet Nº de código
- ST - - 195N1109
- SB - - 195N1110
R3 ST - - 195N1111
R3 SB - - 195N1112
- ST X - 195N1113
- SB X - 195N1114
R3 ST X - 195N1115
R3 SB X - 195N1116
- ST - X 195N1117
- SB - X 195N1118
R3 ST - X 195N1119
R3 SB - X 195N1120
15 kW VLT 2881 3 x 380-480 V
RFI Unidad Profibus DP DeviceNet Nº de código
- ST - - 195N1121
- SB - - 195N1122
R3 ST - - 195N1123
R3 SB - - 195N1124
- ST X - 195N1125
- SB X - 195N1126
R3 ST X - 195N1127
R3 SB X - 195N1128
- ST - X 195N1129
- SB - X 195N1130
R3 ST - X 195N1131
R3 SB - X 195N1132
18.5 kW VLT 2882 3 x 380-480 V
RFI Unidad Profibus DP DeviceNet Nº de código
- ST - - 195N1133
- SB - - 195N1134
R3 ST - - 195N1135
R3 SB - - 195N1136
- ST X - 195N1137
- SB X - 195N1138
R3 ST X - 195N1139
R3 SB X - 195N1140
- ST - X 195N1141
- SB - X 195N1142
R3 ST - X 195N1143
R3 SB - X 195N1144
ST: Unidad estándar.SB: Unidad estándar con freno integrado.R1: Con filtro RFI que cumple EN 55011-1A.R3: Con filtro RFI que cumple EN 55011-1B.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 19
Intr
od
ucci
ón
alV
LT28
00

VLT® Serie 2800
■ Formulario de pedido
MG.28.E5.05 - VLT es una marca registrada de Danfoss20

VLT® Serie 2800
■ Software para PC y comunicación serieDanfoss ofrece varias opciones distintas para la co-municación serie. Con la comunicación serie esposible vigilar, programar y controlar uno o variosconvertidores de frecuencia desde un ordenadorcentral.Todos los convertidores de frecuencia VLT 2800están equipados con un puerto RS 485 de forma es-tándar, que permite la comunicación con un PC, porejemplo. Hay disponible para esta función el pro-grama de aplicación VLT Software Dialog.VLT Software Dialog está formado por tres módulos,y debe instalarse como mínimo con los programasdel módulo Básico.
El módulo Básico incluye:TEST RUN utilizado para probar y controlar un con-vertidor de frecuencia, incluyendo- Ajuste de valores de referencia.- Visualización simultánea en forma de gráficos de
los parámetros seleccionados.- opción de enlace DDE, por ejemplo, a hojas de
cálculo.
AJUSTE DE PARAMETROS se utiliza para configu-rar y transmitir conjuntos de parámetros, incluyendo:- Ajuste de parámetros del convertidor de frecuen-
cia.- Transferencia y copia de conjuntos de parámet-
ros a/desde el convertidor de frecuencia.- Impresión de documentación/Ajustes incluyendo
gráficos.
HISTORIAL se utiliza para ver las distintas etapasde desarrollo de VLT Software Dialog.
AJUSTE DE DIRECCION DE BUS sólo se utilizapara la comunicación con VLT 2800.
El módulo de Registro incluye lo siguiente:REGISTRO se utiliza para recoger y mostrar datosde funcionamiento históricos o en tiempo real.- Presentación en forma de gráficos de los
parámetros seleccionados correspondientes avarios convertidores de frecuencia.
- Recogida de datos para el archivo de registro.- opción de enlace DDE, por ejemplo, a hojas de
cálculo.
AJUSTE DE MODEM se utiliza para configurar elmódem del convertidor de frecuencia. Este móduloconfigura el módulo del convertidor mediante elpuerto de comunicación del equipo PC.
El módulo de Plantillas incluye:AJUSTE DE PLANTILLAS se utiliza para configurararchivos de plantilla que sirven para AJUSTE DEPARAMETROS.- El archivo de plantilla actúa como un filtro que
limita el número de parámetros a los que se ac-cede cuando se crea o modifica un archivo deparámetros en AJUSTE DE PARAMETROS
- El archivo de plantilla puede contener valorespreajustados para los parámetros del convertidorde frecuencia
¡NOTA!:Los módulos de Registro y de Plantillas re-quieren que se instale el módulo Básico en el
mismo PC.
El módulo de Visita guiada incluye:La Visita guiada ofrece una demostración del pro-grama VLT Software Dialog.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 21
Intr
od
ucci
ón
alV
LT28
00

VLT® Serie 2800
■ Accesorios para VLT 2800
Tipo Descripción Nº de códigoBobina de motor El módulo de bobina de motor se puede utilizar con los
convertidores VLT 2803-2875195N3110
Filtro RFI 1B El módulo de filtro RFI 1B se puede utilizar con los con-vertidores VLT 2803-2875
195N3103
Filtro RFI 1B/LC 4 A El filtro RFI 1B/LC 4 A se puede utilizar con VLT 2803-2805 200-240 V y VLT 2805-2815 380-400 V
195N3100
Filtro RFI 1B/LC 9.1 A El filtro RFI 1B/LC 9.1 A se puede utilizar con VLT 2807-2815 200-240 V y VLT 2822-2840 380-400 V
195N3101
Tapa de terminal NEMA 1 VLT 2803-2815 200-240 V, VLT 2805-2815 380-480 V 195N1900Tapa de terminal NEMA 1 VLT 2822 200-240 V, VLT 2822-2840 380-480 V 195N1901Tapa de terminal NEMA 1 VLT 2840 200-240 V, VLT 2855-2875 380-480 V 195N1902Panel de control LCP2 LCP2 para programación del convertidor de frecuencia 175N0131Cable para panel de controlLCP2
Cable entre el LCP2 y el convertidor de frecuencia 175Z0929
Cable DeviceNet Cable para conexión DeviceNet 195N3113Kit de montaje remoto LCP2 Kit para el montaje remoto del LCP2 (incl. cable 3 m,
excl. LCP2)175Z0850
LOP (panel de fun-cionamiento local)
El panel LOP se puede utilizar para ajustar las referenciasy el arranque/parada mediante los terminales de control.
175N0128
Software VLT Dialog Versión en CD-ROM* 175Z0953
* Incl. los módulos Básico, de Registro, de Plantillasy de Visita Guiada en 6 idiomas (danés, inglés,alemán, italiano, español y francés).
MG.28.E5.05 - VLT es una marca registrada de Danfoss22

VLT® Serie 2800
■ Frenado dinámicoCon el convertidor VLT 2800, puede mejorarse elfrenado dinámico en una aplicación de dos manerasdistintas, con una resistencia de freno o con el fre-nado de CA.
Danfoss ofrece una gama completa de resistenciasde freno para todos los convertidores VLT 2800.Esta resistencia aplica una carga al circuito interme-dio durante la aplicación del freno, que permite queabsorba la potencia de frenado.Sin una resistencia de freno, la tensión del circuitointermedio del convertidor seguirá aumentandohasta que éste se desconecte por protección. Laventaja obtenida con una resistencia es que las car-gas de gran tamaño se pueden frenar rápidamente,por ejemplo, una cinta transportadora.
Danfoss ha seleccionado una solución en que la re-sistencia de freno no forma parte integrante delconvertidor. Esto da al usuario las siguientes venta-jas:- Es posible seleccionar el tiempo de ciclo de la re-
sistencia.- El calor generado durante el frenado se puede
dirigir hacia fuera del gabinete del panel, por loque puede utilizarse esta energía.
- No hay calentamiento excesivo de los compo-nentes electrónicos, incluso si la resistencia seha sobrecalentado.
Frenado de CA es una función incorporada que seutiliza en las aplicaciones en que se necesita un fre-nado dinámico limitado. El frenado de CA permitereducir la potencia de freno en el motor en vez deuna resistencia. Esta función se dirige a aplica-ciones en que el par de frenado requerido es menosdel 50% del par nominal. Frenado de CA se selec-ciona en el parám. 400 Función de freno.
¡NOTA!:El freno de CA no se puede utilizar si el parde frenado requerido es superior al 50% del
par nominal. En estos casos será necesario haceruso de una resistencia de freno.
■ Configuración del frenoLa figura muestra una configuración del freno con unconvertidor de frecuencia.En los siguientes párrafos, se utilizan abreviaturas yacrónimos sobre las configuraciones del freno quepueden verse en la figura.
■ Cálculo de la resistenciade frenoEl siguiente ejemplo y fórmula sólo es aplicable alos convertidores VLT Serie 2800.Para asegurarse de que el convertidor no se de-sconecte por motivos de seguridad cuando frene elmotor, se selecciona un valor de resistencia a partirdel efecto pico de frenado y la tensión del circuito in-termedio:
Rbr=UDC2
P peak[]
Puede observarse que la resistencia de freno de-pende de la tensi n del circuito intermedio (UDC).Con los convertidores de frecuencia que tienen unatensión de red de 3 x 380 - 480 V, el freno se acti-vará a 770 V (UDC) y si los convertidores tienenuna tensión de red de 3 x 200 - 240 V, el freno seactivará a 385 V (UDC).También puede decidirse por la resistencia de frenorecomendada de Danfoss (R REC). Esto será unagarantía de que el convertidor de frecuencia puedefrenar en el par de freno máximo (MBR). La resisten-cia recomendada puede verse en la tabla depedidos para resistencias de freno.RREC se calcula de esta manera:
Rrec=UDC
2�100
Pmotor�Mbr(%)� �motor � �inv[]
¡NOTA!:Acuérdese de comprobar si la resistenciapuede funcionar con una tensión de 850 V o
430 V, si no utiliza las resistencias de freno de Dan-foss.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 23
Intr
od
ucci
ón
alV
LT28
00

VLT® Serie 2800
�motor es típicamente 0,90 - ?INV es típicamente0,98. Para los convertidores de 400 V y 200 V, re-spectivamente, R REC a un par de frenado del 160%puede expresarse como:
400 volt Rrec= 420139Pmotor
[]
200 volt Rrec= 105035Pmotor
[]
¡NOTA!:La resistencia de freno mínima seleccionada
puede tener un valor óhmico un 10% inferior,como máximo, al valor recomendado por Danfoss.Si se selecciona una resistencia inferior a la mínimarecomendada, hay un riesgo de sobreintensidad, quepodría causar daños irreparables en el convertidor.
■ Cálculo de lapotencia de frenadoAl calcular la potencia de frenado, es necesario ase-gurarse de que la potencia promedio y pico puedendisiparse en la resistencia de freno. La potenciapromedio se determina por el período de tiempo delproceso, es decir, el tiempo que se aplica el frenoen relación con la duración del proceso. La potenciapico se determina por el par de frenado, que sig-nifica que durante el frenado, la resistencia del frenodebe poder disipar la entrada de energía. La figuramuestra la relación entre potencia promedio y pico.
■ Cálculo de la potencia pico de la resistencia de-frenoPPEAK, MEC es la potencia máxima a la que frena eleje del motor. Se calcula como sigue:
PPEAK;MEC =PMOTOR�MBR(%)
100[W ]
Ppeak describe la potencia de frenado transmitida alas resistencias cuando frena el motor. PPEAK es
menor que PPEAK, MEC, ya que la potencia se reducepor el rendimiento del motor y del convertidor de fre-cuencia. El efecto pico se calcula de la siguientemanera:
PPEAK =PMOTOR�MBR(%)�� INV� �MOTOR
100[W ]
Si selecciona la resistencia de freno recomendadapor Danfoss (RREC), tendrá la seguridad de que laresistencia generará un par de frenado del 160% so-bre el eje del motor.
■ Cálculo de la resistencia promedio de la resisten-ciade frenoLa potencia promedio se determina por el período detiempo del proceso, es decir, el tiempo que se aplicael freno en relación con la duración del proceso.El ciclo de servicio del freno se calcula de la sigu-iente manera:
Duty-cycle= Tb�100T p
[%]
Tp = Tiempo del proceso en segundos.Tb = Tiempo de frenado en segundos.
Danfoss tiene disponibles resistencias con ciclos deservicio variables del 40%. Por ejemplo, con un ciclodel 10%, las resistencias de freno pueden utilizarPpeak en el 10% del tiempo de proceso. El 90%restante del período de tiempo se utiliza para rediri-gir el calor sobrante.La potencia promedio en un ciclo de servicio del10% se calcula como sigue:
Pavg=Ppeak
10[W ]
La potencia media en un ciclo de servicio del 40%se calcula como sigue:
Pavg= Ppeak
2; 5[W ]
Estos cálculos son aplicables para un frenadointermitente en períodos de tiempo de hasta 120 se-gundos.
¡NOTA!:Los períodos mayores de 120 segundospueden causar el sobrecalentamiento de la
resistencia.
MG.28.E5.05 - VLT es una marca registrada de Danfoss24

VLT® Serie 2800
■ Frenado continuoPara el frenado continuo, es necesario seleccionaruna resistencia en que la potencia de frenado con-tinuo no sobrepase la potencia promedio PAVG de laresistencia de freno.Diríjase a su distribuidor de Danfoss para más infor-mación.
■ Frenado óptimo con una resistenciaEl frenado dinámico es útil para una velocidad máx-ima aproximada del 8% de la velocidad nominal. Pordebajo del 8% se puede utilizar el frenado de CC sies necesario.El método más efectivo consiste en cambiar del fre-nado dinámico al frenado de CC.
■ Cable de frenoLongitud máx.[m]: 20 mEl cable de conexión a la resistencia de freno debeestar apantallado/blindado. Conecte el apan-tallamiento a la placa posterior conductora delconvertidor de frecuencia y al gabinete metálico dela resistencia por medio de mordazas de cable.
¡NOTA!:Si no se utilizan las resistencias de freno deDanfoss, debe asegurarse que la resistencia
no tenga inducción.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 25
Intr
od
ucci
ón
alV
LT28
00

VLT® Serie 2800
■ Características de seguridad de la instalaciónCuando se instale una resistencia de freno, debehacerse todo lo posible por evitar las sobrecargas,ya que el calor generado por la resistencia puedetener riesgo de incendio.
¡NOTA!:Dicha resistencia debemontarse sobre un material no inflamable.
Para proteger la instalación, debe instalarse un relétérmico que desconecte el convertidor si la intensi-dad del freno es excesiva. Las resistencias de
servicio del 40% de Danfoss incorporan un interrup-tor KLIXON. Las resistencias de tamaño planotienen autoprotección.
El ajuste de la intensidad de freno en el relé térmicose calcula como sigue:
ITHERMAL =
rPAV G
RBR
RBR es el valor de la resistencia en un determinadomomento.El dibujo muestra una instalación con relé térmico.
MG.28.E5.05 - VLT es una marca registrada de Danfoss26

VLT® Serie 2800
■ Resistenciasdefreno
Resistencias de freno de encapsulado plano IP 54
Tipo Pmotor
[kW]RMIN
[]Tamaño [] / [W]
por elementoCiclo servicio
%Código pedido
175Uxxxx2803 (200 V) 0,37 297 330 / 100 W 30 10032805 (200 V) 0,55 198 220 / 100 W 20 10042807 (200 V) 0,75 135 150 / 100 W 14 10052811 (200 V) 1,1 99 100 / 100 W 8 10062815 (200 V) 1,5 69 72 / 200 W 16 09922822 (200 V) 2,2 43 50 / 200 W 9 09932840 (200 V) 3,70 21 50 / 200 W 11 2 x 09931
2805 (400 V) 0,55 747 830 / 100 W 20 10002807 (400 V) 0,75 558 620 / 100 W 14 10012811 (400 V) 1,1 387 430 / 100 W 8 10022815 (400 V) 1,5 297 310 / 200 W 16 09842822 (400 V) 2,2 198 210 / 200 W 9 09872830 (400 V) 3 135 150 / 200 W 5,5 09892840 (400 V) 4 99 240 / 200 W 11 2 x 09861
1Estas dos resistencias se deben conectar en par-alelo.
Consulte el tamaño de las resistencias de encap-sulado plano en la siguiente página
Resistencias de freno de contacto bobinado con interruptor KLIXON, Ciclo de servicio 40%
Tipo Pmotor
[kW]RMIN
[]RREC
[]Ppico
[kW]Pmedia
[kW]Código pe-
dido175U0xxx
2803 (200 V) 0,37 297 330 0,44 0,18 9002805 (200 V) 0,55 198 220 0,66 0,26 9012807 (200 V) 0,75 135 150 0,9 0,36 9022811 (200 V) 1,1 99 110 1,1 0,44 9752815 (200 V) 1,5 74 82 1,8 0,72 9032822 (200 V) 2,2 50 56 2,6 1,06 9042840 (200 V) 3,7 22 25 4,50 1,8 9252805 (400 V) 0,55 747 830 0,6 0,25 9762807 (400 V) 0,75 558 620 0,9 0,36 9102811 (400 V) 1,1 387 430 1,32 0,53 9112815 (400 V) 1,5 297 330 1,8 0,72 9122822 (400 V) 2,2 198 220 2,6 1,06 9132830 (400 V) 3 135 150 3,6 1,44 9142840 (400 V) 4 99 110 4 1,6 9792855 (400 V) 5,5 80 80 5,5 2,2 9772875 (400 V) 7,5 56 56 7,5 3 9782880 (400 V) 11 40 40 11 5 9972881 (400 V) 15 30 30 15 9,3 9982882 (400 V) 18,5 25 25 18,5 12,7 999
RREC = Resistencia de freno recomendada.Ppico = Efecto máx. en freno al 160% del par defrenado.
Pmedia = Potencia media basada en el ciclo de ser-vicio.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 27
Intr
od
ucci
ón
alV
LT28
00

VLT® Serie 2800
Consulte el tamaño de las resistencias de freno decable bobinado en las Instrucciones MI.50.D2.XX.
MG.28.E5.05 - VLT es una marca registrada de Danfoss28

VLT® Serie 2800
■ Dimensiones de las resistencias de freno de encapsulado plano100 W 200 W
MG.28.E5.05 - VLT es una marca registrada de Danfoss 29
Intr
od
ucci
ón
alV
LT28
00

VLT® Serie 2800
■ Unidad de controlEn la parte delantera del convertidor de frecuenciahay un panel de control.
Este panel de control está dividido en cuatro gruposde funciones:1. Display LED de seis dígitos.2. Teclas para modificar los parámetros y cambiar
las funciones del display.3. Luces indicadoras.4. Teclas para el funcionamiento local.
Todos los datos se visualizan en un display LED deseis dígitos que puede mostrar un elemento de datocontinuamente durante el funcionamiento normal.Como suplemento del display, hay tres luces indi-cadoras para la conexión al suministro de red (ON),las advertencias (WARNING) y las alarmas(ALARM). Casi todos los ajustes de parámetro delconvertidor se pueden cambiar inmediatamente me-diante el panel de control, a menos que hayaprogramado esta función en Bloqueada [1] en elparámetro 018 Bloquear cambio de datos.
■ Teclas de control[QUICK MENU] proporciona acceso a los parámet-ros del Menú rápido.La tecla [QUICK MENU] también se utiliza cuandono deben modificarse valores de parámetro.Consulte además[QUICK MENU] + [+].
[CHANGE DATA] se utiliza para cambiar ajustes.La tecla [CHANGE DATA] también sirve para confir-mar un cambio en los ajustes de parámetro.
[+] / [-] se utilizan para seleccionar parámetros ycambiar sus valores.Estas teclas también se utilizan en el modo de Dis-play para seleccionar la visualización de un valor defuncionamiento.
Las teclas [QUICK MENU] + [+] deben pulsarse a lavez para acceder a todos los parámetros. Consulteel modo de Menú
[STOP/RESET] sirve para detener un motor conec-tado o para reiniciar el convertidor de frecuencia trasuna desconexión.Puede estar Sí [1] o No [0] mediante el parámetro014 Parada local. En modo de Display, el displaydestella si la función de parada está activada.
¡NOTA!:Si la tecla [STOP/RESET] se ha ajustado enNo [0] en el parámtro 014 Parada local y no
hay un comando de parada mediante las entradasdigitales o la comunicación serie, el motor sólopuede pararse si se desconecta la tensión de ali-mentación del convertidor de frecuencia.
[START] se utiliza para arrancar el convertidor defrecuencia. Siempre está activada, aunque la tecla[START] no puede anular un comando de parada.
■ Inicialización manualDesconecte la tensión de red. Mantenga pulsadaslas teclas [QUICK MENU] + [+] + [CHANGE DATA]mientras vuelve a conectar la tensión de red eléc-trica. Suelte las teclas, y el convertidor de frecuenciahabrá quedado programado en el ajuste de fábrica.
MG.28.E5.05 - VLT es una marca registrada de Danfoss30
VLT® Serie 2800
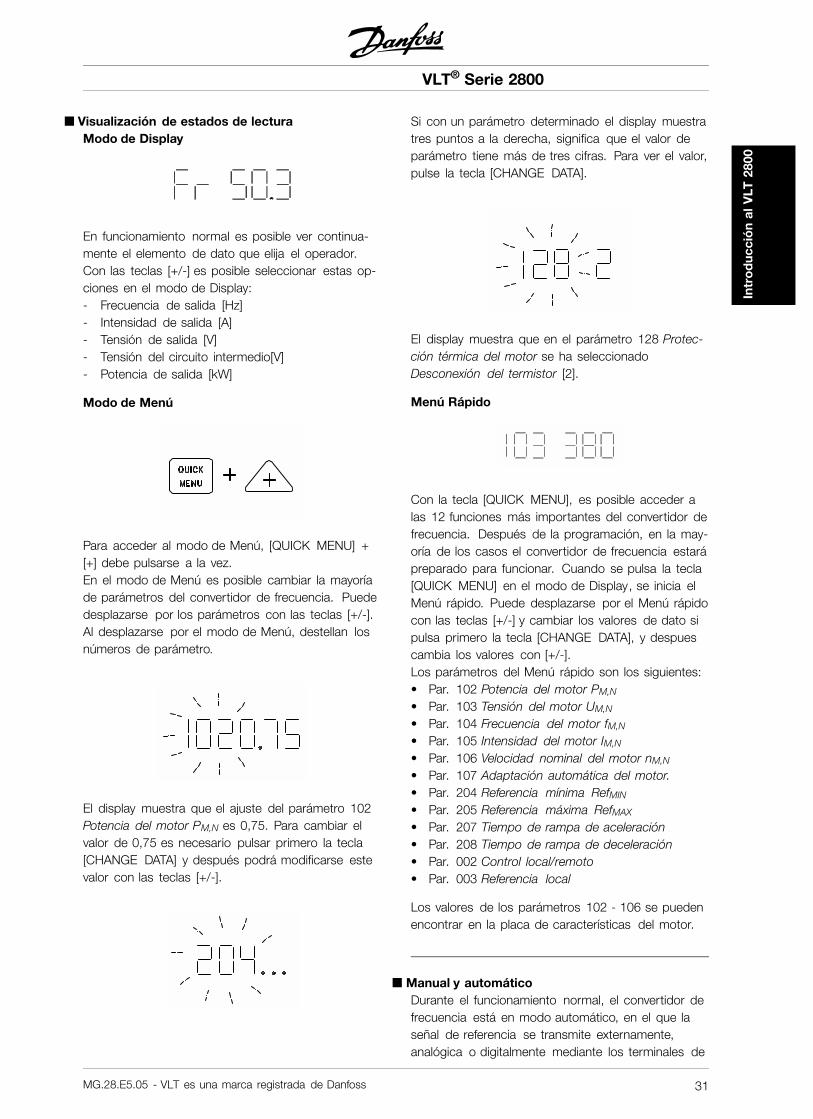
■ Visualización de estados de lecturaModo de Display
En funcionamiento normal es posible ver continua-mente el elemento de dato que elija el operador.Con las teclas [+/-] es posible seleccionar estas op-ciones en el modo de Display:- Frecuencia de salida [Hz]- Intensidad de salida [A]- Tensión de salida [V]- Tensión del circuito intermedio[V]- Potencia de salida [kW]
Modo de Menú
Para acceder al modo de Menú, [QUICK MENU] +[+] debe pulsarse a la vez.En el modo de Menú es posible cambiar la mayoríade parámetros del convertidor de frecuencia. Puededesplazarse por los parámetros con las teclas [+/-].Al desplazarse por el modo de Menú, destellan losnúmeros de parámetro.
El display muestra que el ajuste del parámetro 102Potencia del motor PM,N es 0,75. Para cambiar elvalor de 0,75 es necesario pulsar primero la tecla[CHANGE DATA] y después podrá modificarse estevalor con las teclas [+/-].
Si con un parámetro determinado el display muestratres puntos a la derecha, significa que el valor deparámetro tiene más de tres cifras. Para ver el valor,pulse la tecla [CHANGE DATA].
El display muestra que en el parámetro 128 Protec-ción térmica del motor se ha seleccionadoDesconexión del termistor [2].
Menú Rápido
Con la tecla [QUICK MENU], es posible acceder alas 12 funciones más importantes del convertidor defrecuencia. Después de la programación, en la may-oría de los casos el convertidor de frecuencia estarápreparado para funcionar. Cuando se pulsa la tecla[QUICK MENU] en el modo de Display, se inicia elMenú rápido. Puede desplazarse por el Menú rápidocon las teclas [+/-] y cambiar los valores de dato sipulsa primero la tecla [CHANGE DATA], y despuescambia los valores con [+/-].Los parámetros del Menú rápido son los siguientes:• Par. 102 Potencia del motor PM,N
• Par. 103 Tensión del motor UM,N
• Par. 104 Frecuencia del motor fM,N
• Par. 105 Intensidad del motor IM,N
• Par. 106 Velocidad nominal del motor nM,N
• Par. 107 Adaptación automática del motor.• Par. 204 Referencia mínima RefMIN
• Par. 205 Referencia máxima RefMAX
• Par. 207 Tiempo de rampa de aceleración• Par. 208 Tiempo de rampa de deceleración• Par. 002 Control local/remoto• Par. 003 Referencia local
Los valores de los parámetros 102 - 106 se puedenencontrar en la placa de características del motor.
■ Manual y automáticoDurante el funcionamiento normal, el convertidor defrecuencia está en modo automático, en el que laseñal de referencia se transmite externamente,analógica o digitalmente mediante los terminales de
MG.28.E5.05 - VLT es una marca registrada de Danfoss 31
Intr
od
ucci
ón
alV
LT28
00

VLT® Serie 2800
control. Sin embargo, en modo manual, la señal dereferencia se puede transmitir localmente medianteel panel de control.
Cuando el modo manual está activado, las sigu-ientes señales de control permanecerán activas enlos terminales de control:• Arran que manual (LCP2)• Parada desactivada (LCP2)• Arranque automático (LCP2)• Reset• Parada de inercia inversa• Reset y parada de inercia inversa• Parada rápida inversa• Parada inversa• Cambio de sentido• Freno de CC• Seleccionar ajuste LSB• Seleccionar ajuste MSB• Termistor• Parada precisa inversa• Parada/arranque preciso• Velocidad fija• Comando de parada mediante comunicación se-
rie
Cambio entre modo automático y manual:Al activar la tecla [Change Data] en [Display Mode],el display indicará el modo del convertidor de fre-cuencia.
Desplácese hacia arriba o hacia ab ajo para pasar amodo manual:
Cuando el convertidor de frecuencia esté en modomanual, la lectura será:
y se podrá cambiar la referencia con las siguientesteclas:
¡NOTA!:Tenga en cuenta que la selección de modopuede bloquearse mediante el parámetro 020.
Adaptación automática del motorLa adaptación automática del motor (AMT) se real-iza de la siguiente manera:
1. En el parámetro 107 Adaptación automática delmotor seleccione el valor de dato [2]. “107"destellará, y “2" no destellará.
2. La adaptación AMT se activa al pulsar START.“107" destellará y los guiones se moverán deizquierda a derecha en el campo de valores dedatos.
3. Cuando “107" aparezca otra vez con el valor dedato [0], la adaptación AMT habrá terminado.Pulse [STOP/RESET] para guardar los datos delmotor.
4. “107" seguirá destellando con el valor de dato [0].Ahora puede continuar.
MG.28.E5.05 - VLT es una marca registrada de Danfoss32

VLT® Serie 2800
■ Unidad de controlLCP2, opción
El convertidor VLT 2800 se puede combinar con unaunidad de control LCP (panel de control local - LCP2), formando una interfaz completa para el fun-cionamiento y la programación del convertidor. Launidad de control LCP 2 se puede instalar a tresmetros del convertidor como máximo, por ejemplo,en un panel delantero, mediante un kit de accesorio.
El panel de control se divide en cinco grupos de fun-ciones:1. Display.2. Teclas utilizadas para cambiar la función de visu-
alización.3. Teclas utilizadas para cambiar los parámetros de
programa.4. Luces indicadoras.5. Teclas de control local.
Todos los datos se visualizan en un displayalfanumérico de 4 líneas, que puede mostrar nor-malmente hasta 4 elementos de dato y 3 modos defuncionamiento de manera continua. Durante laprogramación, se mostrará toda la información re-querida para el ajuste rápido y efectivo de losparámetros del convertidor. Como suplemento aldisplay, hay tres luces indicadoras de la tensión(ON), advertencias (WARNING) y alarmas (ALARM).
Todos los Ajustes de parámetros del convertidor defrecuencia se pueden cambiar inmediatamentedesde el panel de control, a menos que esta funciónse haya ajustado en Bloqueado [ 1] en el parámetro018 Bloqueo de parámetros.
■ Teclas de control para Ajuste de parámetrosLas teclas de control están divididas en funciones, ylas teclas entre el display y las luces indicadorassirven para ajustar los parámetros y el modo de vi-sualización del display durante el funcionamientonormal.
[DISPLAY/STATUS] se utiliza para seleccionar elmodo de visualización del display, o para volver almodo de Display desde el Menú rápido o el modode Menú.
[QUICK MENU] da acceso a los parámetros que seutilizan en el Menú rápido. Se puede cambiar entreel Menú rápido y el modo de Menú.
[MENU] da acceso a todos los parámetros. Sepuede cambiar entre el modo de Menú y el Menúrápido.
[CHANGE DATA] sirve para modificar un parámetroque se haya seleccionado en el modo de Menú o enel Menú rápido.
[CANCEL] se utiliza para no aplicar un cambio real-izado en el parámetro seleccionado.
[OK] se utiliza para confirmar el cambio efectuadoen un parámetro seleccionado.
[+ / -] sirven para seleccionar y modificar los valoresde los parámetros.Estas teclas también se utilizan en el modo de Dis-play para cambiar entre las lecturas de las variablesde funcionamiento.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 33
Intr
od
ucci
ón
alV
LT28
00

VLT® Serie 2800
[< >] se utilizan para seleccionar los grupos deparámetros y desplazar el cursor cuando se modi-fique un valor numérico.
■ Luces indicadorasEn la parte inferior del panel de control hay una luzde alarma roja, una luz de advertencia amarilla, yuna luz indicadora verde de tensión.
Si se sobrepasan determinados valores de umbral,las luces de alarma y/o advertencia se activan, juntocon un texto de estado o de alarma que se muestraen el display.
¡NOTA!:La luz indicadora de tensión se activa cuandola tensión está conectada al convertidor de
frecuencia.
■ Modo ref. local
[STOP/RESET] sirve para detener un motor conec-tado o para reiniciar el convertidor de frecuencia trasuna desconexión. Puede activarse o desactivarsemediante el parámetro 014 Parada local.Si se activa la parada, destellará la línea 2 del dis-play.
¡NOTA!:Si no se selecciona la función de paradaexterna y la tecla [STOP/RESET] está desac-
tivada, el motor sólo podrá pararse desconectandola tensión del mismo o del convertidor.
[JOG] cambia l a frecuencia de salida a una fre-cuencia preajustada cuando se mantiene pulsada.Puede activarse o desactivarse en el parámetro 015Velocidad fija local.
[FWD / REV] cambia el sentido de giro del motor,indicándolo con una flecha en el display. Puede acti-
varse o desactivarse mediante el parámetro 016Cambio sentido. La tecla [FWD/REV] sólo está acti-vada cuando el parámetro 002 Control local/remotose ajusta en Control local.
[START] se utiliza para arrancar el convertidor defrecuencia. Siempre está activada, aunque nopuede anular una orden de parada.
¡NOTA!:Si las teclas de control local están desacti-vadas, se activarán cua ndo el convertidor de
frecuencia se ajuste en Control local y Control re-moto en el parámetro 002 Control local/remoto, aexcepción de [FWD/REV], que sólo está activada enControl local.
■ Modo de Display
VAR 2 SETUP
1
STATUS
VAR 1.1 VAR 1.2 VAR 1.3
En el funcionamiento normal, es posible mostrar op-cionalmente hasta 4 elementos de dato en el displayde manera continua: 1,1; 1,2; 1,3 y 2. El estado defuncionamiento o las alarmas y advertencias gener-adas, se muestran en la línea 2 como una cifranumérica.En el caso de las alarmas, se muestra en las líneas3 y 4 con un texto descriptivo.La advertencia parpadeará en la línea 2 con untexto descriptivo en la línea 1. El Ajuste activo tam-bién se mostrará en el display.La flecha indica el sentido de giro seleccionado.Aquí el convertidor de frecuencia muestra que tieneuna señal de cambio de sentido activada. La formade la flecha desaparece si se da una orden deparada, o si la frecuencia de salida cae por debajode 0,1 Hz.La línea inferior indica el estado del convertidor defrecuencia. La barra de desplazamiento muestra losvalores de funcionamiento que pueden verse en laslíneas 1 y 2 en el modo de Display. Los cambios serealizan con las teclas [+ / -].
MG.28.E5.05 - VLT es una marca registrada de Danfoss34

VLT® Serie 2800
Datos de funcionamiento UnidadesReferencia de resultado [%]Referencia de resultado [unidad]Realimentación [unidad]Frecuencia de resultado [Hz]Frecuencia de resultado x escalado [-]Intensidad del motor [A]Par [%]Potencia [kW]Potencia [HP]Tensión del motor [V]Tensión de enlace CC [V]Carga térmica del motor [%]Carga térmica [%]Horas de ejecución [horas]Entrada digital [binario]Referencia de pulso [Hz]Referencia externa [%]Código de estado [hex]Temp. del disipador [�C]Código de alarma [hex]Código de control [hex]Código de aviso [hex]Código de estado ampliado [hex]Entrada analógica 53 [V]Entrada analógica 60 [mA]
Es posible mostrar tres datos de funcionamiento enla primera línea del display, y una variable de op-eración en la segunda línea. Se programa en losparámetros 009, 010, 011 y 012 Lectura del display.
■ Modos de visualizaciónEl panel de control LCP tiene distintas posibilidadesde visualización, que dependen del modo selec-cionado para el convertidor de frecuencia.
Modo de Display I:Este modo es estándar después de la puesta enmarcha o la inicialización.
FRECUENCIA
MOTOR EN MARCHA
50.0 Hz
La línea 2 muestra el valor de un dato de fun-cionamiento en la unidad seleccionada, y la línea 1contiene un texto que explica la línea 2. En el ejem-plo, Frecuencia se ha seleccionado como lectura enel parámetro 009 Lectura del display amplia. En elfuncionamiento normal, puede introducirse otra vari-able inmediatamente con las teclas [+ / -].
Modo de Display II:El cambio entre los modos de Display I y II se realizapulsando rápidamente la tecla [DISPLA Y / STATUS].
24,3% 30,2% 13,8A
MOTOR EN MARCHA
50.0 Hz
En este modo, se muestran todos los valores de cu-atro datos de funcionamiento en la unidad elegida,consulte la siguiente tabla. En el ejemplo, se hanseleccionado: Frecuencia, Referencia, Par e Intensi-dad como lecturas de la primera y segunda línea.
Modo de Display III:Este modo se activa mientras se mantiene pulsadala tecla [DISPLA Y / STATUS]. Al soltarla, el sistemavuelve al modo de Display II, a menos que se hayapulsado aprox. menos de 1 seg, en cuyo casovuelve al modo de Display I.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 35
Intr
od
ucci
ón
alV
LT28
00

VLT® Serie 2800
MOTOR EN MARCHA
50.0 HzREF% PAR% INTEN A
Aquí puede obtener la lectura del nombre de losparámetros y de la unidad en que se miden losdatos de funcionamiento en la primera y segundalínea. La línea 2 del display no cambia.
Modo de Display IV:Puede accederse a este modo durante el fun-cionamiento si se desea realizar un cambio en otroAjuste sin tener que parar el convertidor. Esta fun-ción se activa en el parámetro 005 Editar ajuste.
24,3% 30,2% 13,8A
MOTOR EN MARCHA
50.0 Hz SETUP
12
El Ajuste 2 que se programa destellará a la derechadel Ajuste activo.
■ Ajuste de parámetrosPuede accederse al amplio rango de trabajo delconvertidor de frecuencia mediante un gran númerode parámetros, con el fin de adaptar su funcionali-dad a aplicaciones específicas Para dar una visiónmás rápida de muchos parámetros, puede elegirseentre dos modos de programación - modo de Menúy de Menú rápido. El primero accede a todos losparámetros. El segundo permite que el usuario ac-ceda a los parámetros necesarios para permitir elfuncionamiento del convertidor de frecuencia en lamayoría de los casos, según el Ajuste seleccionado.Independientemente del modo de programación, loscambios en los parámetros tendrán efecto y seránvisibles tanto en el modo de Menú como en el MenúRápido.
Estructura del Menú rápido y el modo de Menú
Además de tener un nombre, cada parámetro sevincula con un número que es el mismo en todos losmodos de programación. En el modo de Menú, losparámetros se dividen en grupos, indicando elprimer dígito del número el grupo al que pertenecen.
• Con la tecla [QUICK MENU], es posible accedera los parámetros más importantes del convertidorde frecuencia. Después de la programación, enla mayoría de los casos el convertidor defrecuencia estará preparado para funcionar. De-splácese por el Menú rápido con las teclas [+ / -]y cambie los valores de dato pulsando las teclas[CHANGE DATA] + [OK].
• El modo de Menú permite elegir y cambiar todoslos parámetros que sea necesario. Sin embargo,algunos parámetros aparecerán "atenuados",según la opción elegida en el parámetro 100Configuración.
■ Menú Rápido con unidad de control LCP 2Inicie la Configuración rápida pulsando la tecla[QUICK MENU], que hará que se muestren los sigu-ientes valores en el display:
50.0 HzESPAÑOL
001 LENGUAJE
MENU RAPIDO X OF Y
En la parte inferior, se indican el número y el nom-bre del parámetro, junto con el estado/valor delprimer parámetro del Menú Rápido. La primera vezque se pulsa [QUICK MENU] después de encenderla unidad, las lecturas empiezan en la posición 1,consulte la siguiente tabla.
MG.28.E5.05 - VLT es una marca registrada de Danfoss36

VLT® Serie 2800
Pos. Nº parám. Unidad1 001 Idioma2 102 Potencia del motor [kW]3 103 Tensión del motor [V]4 104 Frecuencia del motor [Hz]5 105 Intensidad del motor [A]6 106 Velocidad nominal del motor [rpm]7 107 Adaptación automática del
motor8 204 Referencia mínima [Hz]9 205 Referencia máxima [Hz]10 207 Tiempo rampa de acel-
eración[seg]
11 208 Tiempo rampa de decel-eración
[seg]
12 002 Control local/remoto13 003 Referencia local [Hz]
■ Selección de parámetrosEl modo de Menú se inicia con la tecla [MENU], queda la siguiente lectura en el display:
FRECUENCIA
50.0 Hz0 PANEL Y DISPLAY
La línea 3 muestra el número y nombre del grupo deparámetros.
En el modo de Menú, los parámetros están divididosen grupos. La selección de cada grupo se realizacon las teclas [< >].Es posible acceder a los siguientes grupos:
Nº grupo Grupo de parámetros0 Funcionamiento y display1 Carga y motor2 Referencias y límites3 Entradas y salidas4 Funciones especiales5 Comunicación serie6 Funciones técnicas
Una vez seleccionado el grupo de parámetros re-querido, puede elegirse cada parámetro con lasteclas [+ / -]:
FREKVENS
001 LENGUAJE
ENGLISH
50.0 Hz
La línea 3 del display muestra el número y nombredel parámetro seleccionado, mientras que el estado/valor del mismo se indica en la línea 4.
Cambio de datosTanto si se ha seleccionado un parámetro en elMenú Rápido como en el modo de Menú, el proced-imiento para cambiar los datos es el mismo. Alpulsar la tecla [CHANGE DATA] se accede a cam-
MG.28.E5.05 - VLT es una marca registrada de Danfoss 37
Intr
od
ucci
ón
alV
LT28
00
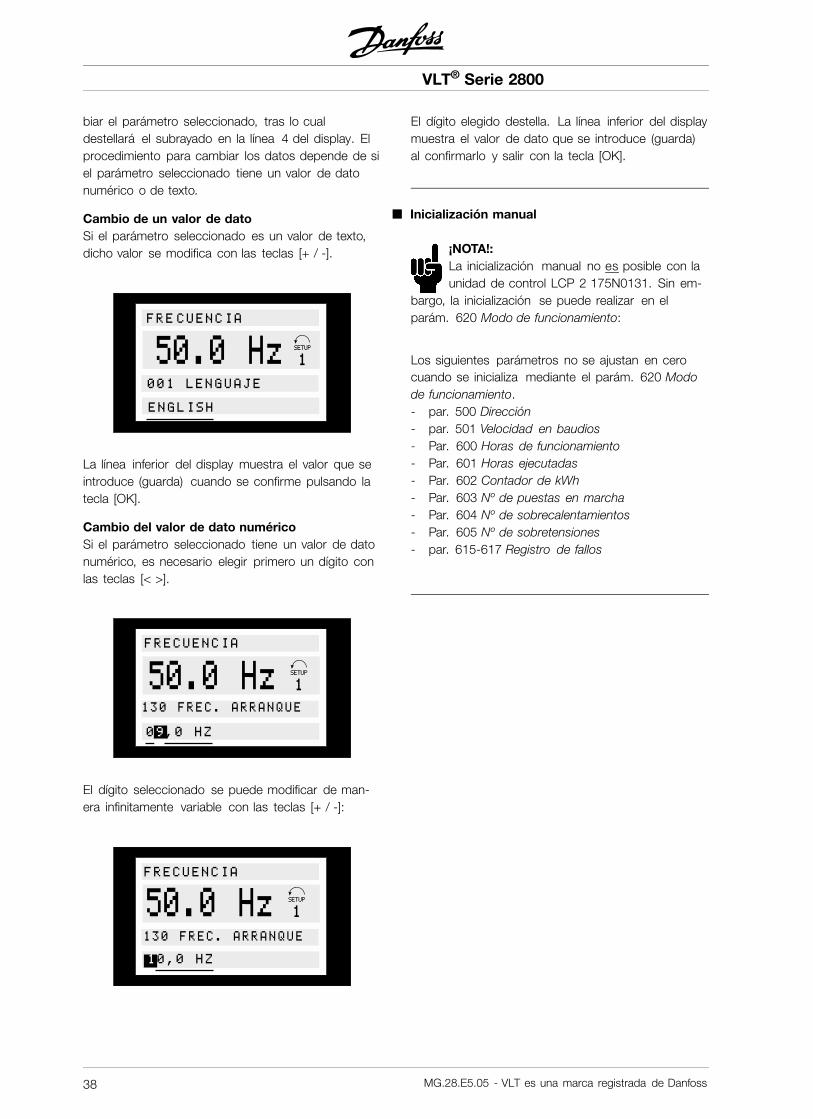
VLT® Serie 2800
biar el parámetro seleccionado, tras lo cualdestellará el subrayado en la línea 4 del display. Elprocedimiento para cambiar los datos depende de siel parámetro seleccionado tiene un valor de datonumérico o de texto.
Cambio de un valor de datoSi el parámetro seleccionado es un valor de texto,dicho valor se modifica con las teclas [+ / -].
50.0 HzFRECUENCIA
001 LENGUAJE
ENGLISH
La línea inferior del display muestra el valor que seintroduce (guarda) cuando se confirme pulsando latecla [OK].
Cambio del valor de dato numéricoSi el parámetro seleccionado tiene un valor de datonumérico, es necesario elegir primero un dígito conlas teclas [< >].
09,0 HZ
FRECUENCIA
50.0 Hz130 FREC. ARRANQUE
El dígito seleccionado se puede modificar de man-era infinitamente variable con las teclas [+ / -]:
50.0 Hz130 FREC. ARRANQUE
10,0 HZ
FRECUENCIA
El dígito elegido destella. La línea inferior del displaymuestra el valor de dato que se introduce (guarda)al confirmarlo y salir con la tecla [OK].
■ Inicialización manual
¡NOTA!:La inicialización manual no es posible con launidad de control LCP 2 175N0131. Sin em-
bargo, la inicialización se puede realizar en elparám. 620 Modo de funcionamiento:
Los siguientes parámetros no se ajustan en cerocuando se inicializa mediante el parám. 620 Modode funcionamiento.- par. 500 Dirección- par. 501 Velocidad en baudios- Par. 600 Horas de funcionamiento- Par. 601 Horas ejecutadas- Par. 602 Contador de kWh- Par. 603 Nº de puestas en marcha- Par. 604 Nº de sobrecalentamientos- Par. 605 Nº de sobretensiones- par. 615-617 Registro de fallos
MG.28.E5.05 - VLT es una marca registrada de Danfoss38

VLT® Serie 2800
■ Dimensiones mecánicasLos siguientes dibujos muestran las dimensionesmecánicas. Todas las dimensiones se indican enmm.
VLT 2803-2815 200-240 VVLT 2805-2815 380-480 V
VLT 2822 200-240 VVLT 2822-2840 380-480 V
VLT 2840 200-240 voltiosVLT 2855-2875 380-480 voltios
VLT 2880-82 380-480V
MG.28.E5.05 - VLT es una marca registrada de Danfoss 39
Inst
alac
ión

VLT® Serie 2800
■ Tapa de terminalEl siguiente dibujo muestras las dimensiones de latapa de terminal NEMA 1 para VLT 2803-2875.La dimensión ’a’ depende del tipo de unidad.
MG.28.E5.05 - VLT es una marca registrada de Danfoss40

VLT® Serie 2800
■ Instalaciónmecánica
Preste especial atención a losrequisitos que se aplican a la instalación.
El convertidor de frecuencia se refrigera por circu-lación de aire. Para que la unidad pueda soltar elaire de refrigeración, la distancia mínima encima ydebajo de la unidad debe ser de 100 mm. Para quela unidad no se sobrecaliente, compruebe que latemperatura ambiente no excede la temperaturamáxima indicada para el convertidor de frecuencia nila temperatura media de 24 horas. Ambas temperat-uras se indican en los Datos técnicos generales. Sila temperatura ambiente oscila entre 45 �C - 55 �C,deberá reducirse la potencia del convertidor de fre-cuencia. Consulte Reducción de potencia en funciónde la temperatura ambiente. Tenga en cuenta que laduración del convertidor de frecuencia disminuirá amenos que se reduzca la potencia en función de latemperatura ambiente.
■ IntegraciónTodas las unidades con alojamiento IP 20 debenintegrase en armarios y paneles. IP 20 no es ade-cuado para montaje remoto. En algunos países, p.ej., EE.UU., las unidades con alojamiento NEMA 1están aprobadas para el montaje remoto.
■ Espacio para instalación mecánicaTodas las unidades requieren un mínimo de 100 mmde distancia de ventilación entre los demás compo-nentes y ranuras de ventilación del alojamiento.
■ Lado a ladoTodas las unidades VLT 2800 se pueden instalarlado a lado y en cualquier posición, ya que no re-quieren ventilación en los laterales.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 41
Inst
alac
ión

VLT® Serie 2800
MG.28.E5.05 - VLT es una marca registrada de Danfoss42

VLT® Serie 2800
■ Advertencia de alta tensión
La tensión del convertidor de frecuen-cia es peligrosa cuando el equipo estáconectado a la red. La conexión incor-
recta del motor o del convertidor de frecuenciapuede causar fallos en el equipo, lesiones graves eincluso la muerte. Por ello, deben seguirse las in-strucciones de este manual, así como lasreglamentaciones de seguridad locales y nacionales.
Puede resultar peligroso tocar los ele-mentos eléctricos incluso después de desconectar latensión. Espere al menos 4 minutos.
¡NOTA!:Es responsabilidad del usuario o del instal-ador asegurar la conexión a tierra y protección
correctas según las reglas nacionales y locales.
■ Conexión a tierraDurante la instalación deben tenerse en cuenta lossiguientes puntos básicos:
• Fuga a tierra de seguridad: observe que el con-vertidor de frecuencia tiene una alta corriente defuga y debe conectarse a tierra de forma ade-cuada por razones de seguridad. Aplique lasreglamentaciones locales de seguridad.
• Fuga a tierra de alta frecuencia: los cables deconexión a tierra deben ser lo más cortos quesea posible.
Conecte los diferentes sistemas de toma de tierra yasí asegurará la impedancia de conductor más bajaposible. La impedancia de conductor más baja posi-ble se obtiene manteniendo el conductor tan cortocomo sea posible y utilizando el área de superficiemás extensa posible. Un conductor plano, por ejem-plo, tiene una impedancia de AF más baja que unconductor redondo para la misma sección C delconductor.VESS. Si se instalan varias unidades en ar-marios, la placa del fondo del armario debe estarcompuesta de metal y utilizarse como placa de ref-erencia de conexión a tierra conjunta. Los armariosmetálicos de las diferentes unidades se montan enla placa del fondo del armario con la impedancia deAF más baja posible. Con esta función no surgendiferentes tensiones de AF para cada unidad ni seproducen intensidades de interferencias en los ca-bles de conexión entre las unidades. Se reduciránlas interferencias radiadas. Para obtener una bajaimpedancia de AF, use las tuercas de ajuste de lasunidades como conexión de AF con la placa del
fondo. Es necesario retirar la pintura aislante o simi-lar de los puntos de ajuste.
■ CablesEl cable de control y el cable de red deben insta-larse separados de los cables de motor, a fin deevitar la transferencia de ruido. Como regla, essuficiente una distancia de 20 cm, aunque se re-comienda que la separación sea la máxima posible,especialmente cuando los cables se instalen en par-alelo en distancias largas.
Para los cables de señal muy sensible, como lostelefónicos o de datos, se recomienda la mayor dis-tancia posible. Tome en cuenta que la distanciarequerida depende de la instalación y la sensibilidadde los cables de señal, por lo que no es posible es-tablecer valores exactos.
Cuando se coloquen en canalizaciones para cables,los cables de señal no pueden situarse junto con loscables de motor. Si un cable de señal cruza los ca-bles de potencia, debe hacerlo a un ángulo de 90grados. Recuerde que los cables de entrada y sal-ida con ruido conectados a un armario deben ser detipo apantallado.Consulte también Instalación eléctrica correcta encuanto a EMC.
■ Cables apantallados/blindadosEl apantallamiento debe tener una baja impedanciade AF, lo que se consigue con un apantallamientotrenzado de cobre, aluminio o hierro. El refuerzo deapantallamiento indicado para la protecciónmecánica, por ejemplo, no es adecuado para la cor-recta instalación en cuanto a EMC.Consulte también Uso de cables correctos de EMC.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 43
Inst
alac
ión

VLT® Serie 2800
■ Protección adicionalComo protección adicional pueden utilizarse relésRCDo una o varias conexiones a tierra de protec-ción, siempre que se cumplan las normas deseguridad locales. En caso de un fallo a tierra,puede generarse un contenido CC en la corrientedefectuosa. No utilice nunca un relé RCD (reléELCB), tipo A, ya que no es adecuado para corri-entes de CC defectuosas. Si utiliza relés RCD,deberá cumplir las normas locales.Si utiliza relés RCD, tendrán que ser:
- Adecuados para proteger equipos con contenidode CC en la corriente defectuosa (puente rectifi-cador trifásico)
- Adecuados para una breve descarga con formade pulso durante el encendido
- Adecuados para una corriente de fuga alta.
■ Prueba de alta tensiónEs posible realizar una prueba de alta tensiónponiendo en cortocircuito los terminales U, V, W, L1,L2 y L3 mientras se aplica energía entre el cortocir-cuito y el terminal 95 con un máximo de 2160 V CCdurante 1 seg.
MG.28.E5.05 - VLT es una marca registrada de Danfoss44

VLT® Serie 2800
■ Instalación eléctrica correcta en cuantoaEMCPuntos generales que deben observarse paraasegurar una instalación correcta en cuanto a com-patibilidad electromagnética (EMC).
- Utilice únicamente cables de motor y de controlapantallados/blindados.
- Conecte el apantallamiento a tierra en ambos ex-tremos.
- Debe evitarse el montaje con extremos de apan-tallamiento enrollados (espirales), ya que anula elefecto de apantallamiento con frecuencias altas.Es mejor utilizar estribos de cable.
- Es importante asegurar que la placa de insta-lación tiene un buen contacto eléctrico con elarmario metálico del convertidor de frecuencia através de los tornillos de instalación.
- Utilice discos dentados y placas de instalacióngalvánicamente conductoras.
- No utilice cables de motor no apantallados/noblindados en los armarios de instalación.
La ilustración siguiente muestra la instalacióneléctrica correcta en cuanto a EMC, donde el con-vertidor de frecuencia se ha fijado a un armario deinstalación y se ha conectado a un PLC.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 45
Inst
alac
ión

VLT® Serie 2800
■ Uso de cables correctos para EMCPara cumplir con los requisitos de EMC relativos a lainmunidad de los cables de control y a las emisionesde los cables del motor, deben utilizarse cablesapantallados/blindados.La capacidad de un cable para reducir la radiaciónentrante y saliente de interferencias eléctricas de-pende de la impedancia de transferencia (Z T). Elapantallamiento de un cable normalmente está dis-eñado para reducir la transferencia de interferenciaseléctricas, y un apantallamiento con un valor ZT re-ducido es más eficaz que un apantallamiento con unvalor ZT elevado.Los fabricantes de cables no suelen indicar elvalorZT, pero a menudo es posible calcularlo obser-vando y evaluando el diseño físico del cable.
ZT puede calcularse a partir de los siguientes fac-tores:- La resistencia de contacto entre cada conductor
del apantallamiento.- La cubierta del apantallamiento, es decir, el área
física del cable que está apantallada. Normal-mente, se indica como un porcentaje y debe sercomo mínimo del 85%.
- El tipo de apantallamiento, trenzado o retorcido.Se recomienda el tipo trenzado o de conductocerrado.
MG.28.E5.05 - VLT es una marca registrada de Danfoss46

VLT® Serie 2800
■ Conexión a tierra de cables de control apantalla-dos/blindadosEn general, los cables de control deben ser apan-tallados/blindados, y el apantallamiento debeconectarse al armario metálico de la unidad con unamordaza de cable en cada extremo.
El siguiente dibujo muestra la forma correcta de re-alizar la conexión a tierra, y cómo solucionar lasdudas.
1. Conexión a tierra correctaLos cables de control y de comunicación seriedeben fijarse con mordazas en ambos extremospara asegurar el mayor contacto eléctrico posible.
2. Conexión a tierra incorrectaNo utilice extremos retorcidos del apan-tallamiento que estén entrelazados (espirales), yaque incrementan la impedanc ia del apan-tallamiento a frecuencias altas.
3. Protección en cuanto al potencial de tierra en-tre el PLC y el VLTSi el potencial de tierra entre el convertidor defrecuencia y el PLC (etc.) es diferente, puedegenerarse ruido eléctrico que provocará al-teraciones en todo el sistema. La solución a esteproblema es un cable de ecualización que debecolocarse al lado del cable de control. Tamañomínimo de la sección transversal del cable: 16mm2.
4. Si hay un bucle de tierra de 50/60 HzEn el caso de utilizar cables demasiado largos,pueden surgir bucles de tierra de 50/60, quepueden interferir en la totalidad del sistema. Esteproblema se soluciona conectando a tierra unextremo del apantallamiento mediante un con-densador de 100 nF (patillas cortas).
MG.28.E5.05 - VLT es una marca registrada de Danfoss 47
Inst
alac
ión

VLT® Serie 2800
■ Diagrama
* Filtro RFI 1A integrado y freno como opciones.** VLT 2803-2815 200-240 V no se suministra conbobina del circuito intermedio.
MG.28.E5.05 - VLT es una marca registrada de Danfoss48

VLT® Serie 2800
■ Instalación eléctrica
VLT 2803-2815 200-240 V, 2805-2815 380-480 V
MG.28.E5.05 - VLT es una marca registrada de Danfoss 49
Inst
alac
ión

VLT® Serie 2800
VLT 2822 200-240 V, 2822-2840 380-480 VVLT 2840 200-240 V, 2855-2875 380-480 V
MG.28.E5.05 - VLT es una marca registrada de Danfoss50

VLT® Serie 2800
VLT 2880-82 380-480V
Tenga en cuenta que las unidades se suministrancon dos placas inferiores, una para glándulas métri-cas y otra para conductos
MG.28.E5.05 - VLT es una marca registrada de Danfoss 51
Inst
alac
ión

VLT® Serie 2800
■ Abrazadera de seguridad
Si debe mantenerse el aislamientogalvánico (PELV) entre los terminales decontrol y los terminales de alta tensión,
es obligatorio instalar la abrazadera de seguridadsuministrada en los VLT 2803–2815, 200–240 V, yVLT 2805–2815, 380–480 V.
■ FusiblespreviosEn todos los tipos de unidades deben instalarsefusibles previos externos en la alimentación de reddel convertidor de frecuencia. Para aplicaciones UL/cUL con una tensión de red de 200-240 voltios, util-ice fusibles previos tipo Bussmann KTN-R (200-240voltios) o Ferraz Shawmut tipo ATMR (máx. 30 A).Para aplicaciones UL/cUL con una tensión de red de380-480 voltios, utilice fusibles previos tipo Buss-mann KTS-R (380-480 voltios). Consulte Datostécnicos para elegir las dimensiones correctas delos fusibles previos.
■ Conexiónde redTenga en cuenta que con 1 x 220-240 V, el hilo deneutro debe conectarse al terminal N (L2) y el hilo defase al terminal L1 (L1).
Nº N(L2) L1(L1) (L3) Tensión de red 1 x 220-240 V
N L1
Nº 95 Conexión a tierra
Nº N(L2) L1(L1) (L3) Tensión de red 3 x 220-240 V
L2 L1 L3
Nº 95 Conexión a tierra
Nº 91 92 93 Tensión de red 3 x 380-480 V
L1 L2 L3
Nº 95 Conexión a tierra
¡NOTA!:Compruebe que la tensión de red coincidecon la tensión de alimentación eléctrica del
convertidor de frecuencia, que puede leerse en laplaca de características.
Las unidades de 400 V con filtros RFI nose pueden conectar a un suministro eléc-trico en que la tensión entre fase y tierra
sea mayor de 300 voltios. Tenga presente que parala conexión a tierra en triángulo y los terminales deentrada de alimentación eléctrica, la tensión de redpuede ser mayor de 300 voltios entre fase y tierra.
Consulte los Datos técnicos para averiguar lasdimensiones correctas de la sección del cable. Con-sulte también la sección Aislamiento galvánico paraobtener más información.
■ Conexión del motorConecte el motor a los terminales 96, 97, 98.Conecte el terminal 99 a tierra.
Nº 96 97 98 Tensión de motor 0-100%U V W de la tensión de la red.
Nº 99 Conexión a tierra
Consulte los Datos técnicos para averiguar las di-mensiones correctas de la sección del cable.
Todos los tipos de motores asíncronos trifásicosestándar pueden conectarse a un convertidor de fre-cuencia. Normalmente, los motores pequeños seconectan en estrella (230/400 V, �/ Y). Los motoresgrandes se conectan en triángulo (400/690 V, �/ Y).El modo y la tensión de conexión correctos se indi-can en la placa de características del motor.
¡NOTA!:En motores sin papel de aislamiento de fase,debe instalarse un filtro LC en la salida del
convertidor de frecuencia.
MG.28.E5.05 - VLT es una marca registrada de Danfoss52

VLT® Serie 2800
■ Sentido de giro de motor
Según el ajuste de fábrica, el motor gira en el sen-tido de las agujas del reloj con la salida deltransformador del convertidor de frecuencia conec-tada del modo siguiente:
Terminal 96 conectado a la fase U.
Terminal 97 conectado a la fase V.
Terminal 98 conectado a la fase W.
El sentido de rotación puede modificarse conmu-tando dos fases en los terminales del motor.
■ Conexión en paralelo de motores
El convertidor de frecuencia puede controlar variosmotores conectados en paralelo. Si hace falta quelos motores tengan diferentes valores de rpm, utilicemotores con diferentes valores nominales de rpm.El valor de rpm del motor cambia simultáneamente,lo que significa que la relación entre los valoresnominales de rpm se mantiene en todo el rango. Elconsumo total de intensidad de los motores no debe
sobrepasar la intensidad de salida nominal IINV delconvertidor de frecuencia.
Pueden surgir problemas en el arranque con valoresde rpm bajos si los motores tienen un tamaño muydistinto. Esto se debe a que la resistencia óhmica,relativamente alta, en el estátor de los motorespequeños requiere una tensión más alta en el ar-ranque y valores de rpm más bajos.
En sistemas con motores conectados en paralelo noes posible emplear el relé térmico electrónico (ETR)del convertidor de frecuencia como protección paracada motor. Por este motivo, debe utilizarse otraprotección para los motores, como los termistoresen cada uno (o un relé térmico individual).
¡NOTA!:El parámetro 107 Adaptación automática delmotor, AMT no se puede utilizar cuando los
motores están conectados en paralelo. El parámetro101 Características de par debe ajustarse en Carac-terísticas de motor especial [8] cuando los motoresse conectan en paralelo.
■ Cables de motorConsulte los Datos técnicos para elegir las dimen-siones correctas de sección y longitud del cable demotor. Respete siempre las normas nacionales y lo-cales sobre la sección de cables.
¡NOTA!:Si usa cable no apantallado/no blindado, nocumplirá algunos requisitos sobre EMC. Con-
sulte EMC test results en la Guía de Diseño.
Para cumplir las especificaciones de compatibilidadelectromagnética relativas a emisiones, el cable demotor debe estar apantallado/blindado a menos quese indique lo contrario para el filtro RFI en cuestión.Es importante mantener el cable de motor lo máscorto posible para reducir al mínimo el nivel deinterferencias y las corrientes de fuga. El apan-tallamiento del cable de motor debe conectarse alarmario metálico del convertidor de frecuencia y aldel motor. Las conexiones de apantallamientodeben hacerse utilizando una superficie lo más ex-tensa posible (estribo de cable). Esto lo permitendiversos dispositivos de instalación en los diferentesconvertidores de frecuencia Debe evitarse el mon-taje con extremos de apantallamiento enrollados(espirales), ya que anula el efecto de apan-tallamiento con frecuencias altas. Si resultanecesario romper el apantallamiento para instalar
MG.28.E5.05 - VLT es una marca registrada de Danfoss 53
Inst
alac
ión

VLT® Serie 2800
aisladores o relés de motor, el apantallamiento debecontinuarse a la menor impedancia de AF posible.
■ Protección térmicadel motorEl relé térmico electrónico de los convertidores defrecuencia que cuentan con la aprobación UL tam-bién cuentan con esta aprobación para protecciónde motor único cuando el parámetro 128 Motor ther-mal protection está ajustado en ETR Trip y elparámetro 105 Motor current, IM, N está programadoen intensidad nominal del motor (consulte la placade características del motor).
■ Conexión del freno
Nº 81 82 Resistencia de frenoR- R+ terminales
El cable de conexión con la resistencia de frenodebe estar apantallado/blindado. Conecte el apan-tallamiento al armario metálico del convertidor defrecuencia y al de la resistencia de freno con estri-bos de cable. Elija un cable de freno cuya secciónse adecue al par de frenado.
Consulte la Guía de Diseño para seleccionar las di-mensiones de las resistencias de freno.
¡NOTA!:Tenga en cuenta que en los terminalespueden generarse tensiones de hasta 850 V
CC.
■ Conexióna tierraLa corriente de fuga a tierra puede ser mayor que3,5 mA, por lo que el convertidor de frecuencia sedeberá conectar a tierra según los reglamentos na-cionales y locales. Para que el cable de tierra tengauna buena conexión mecánica al terminal 95, susección debe medir como mínimo 10 mm2 o sepueden utilizar 2 cables de especificación nominalterminados por separado. Para aumentar laseguridad, puede instalar un RCD (dispositivo de in-tensidad residual), que hará que el convertidor sedesconecte cuando la corriente de fuga sea exce-siva. Consulte también la Nota de aplicación delRCD MN.90.GX.02.
■ Carga compartidaLa carga compartida permite conectar entre sí loscircuitos intermedios de CC de varios convertidoresde frecuencia. Esto requiere ampliar la instalacióncon más fusible y bobinas de CA. Para utilizar lacarga compartida, el parámetro 400 Función defreno se debe ajustar en Carga compartida [5].Diríjase a Danfoss o consulte las instrucciones NºMI.50.N1.02 para más información.
Nº 88 89 Carga compartida- +
Tenga en cuentaque puede haber una tensión de hasta850 V CC entre los terminales 88 y 89.
■ Control de freno mecánicoEn las aplicaciones de elevación/descenso, seránecesario controlar un freno electromagnético. Estefreno se controla con una salida de relé o una salidadigital (terminal 46). La salida debe mantenerse cer-rada (sin tensión) durante el intervalo de tiempo enque el convertidor no pueda ’mantener’ el motor, porejemplo, si la carga es excesiva. Seleccione Con-trol de freno mecánico en el parámetro 323 o 341para las aplicaciones con freno electromagnético.Cuando la frecuencia de salida sobrepase el valorde desconexión del freno, ajustado en el parámetro138, éste se soltará si la intensidad del motor au-menta por encima del valor ajustado en el parámetro140. El freno se activará cuando la frecuencia desalida sea menor que la frecuencia de enganche delmotor, que se ajusta en el parámetro 139.Si el convertidor emite una alarma o está ensituación de sobretensión, el freno mecánico actuaráinmediatamente.
¡NOTA!:Esta aplicación de el-evación/descenso es sin utilizar contrapesos.
MG.28.E5.05 - VLT es una marca registrada de Danfoss54
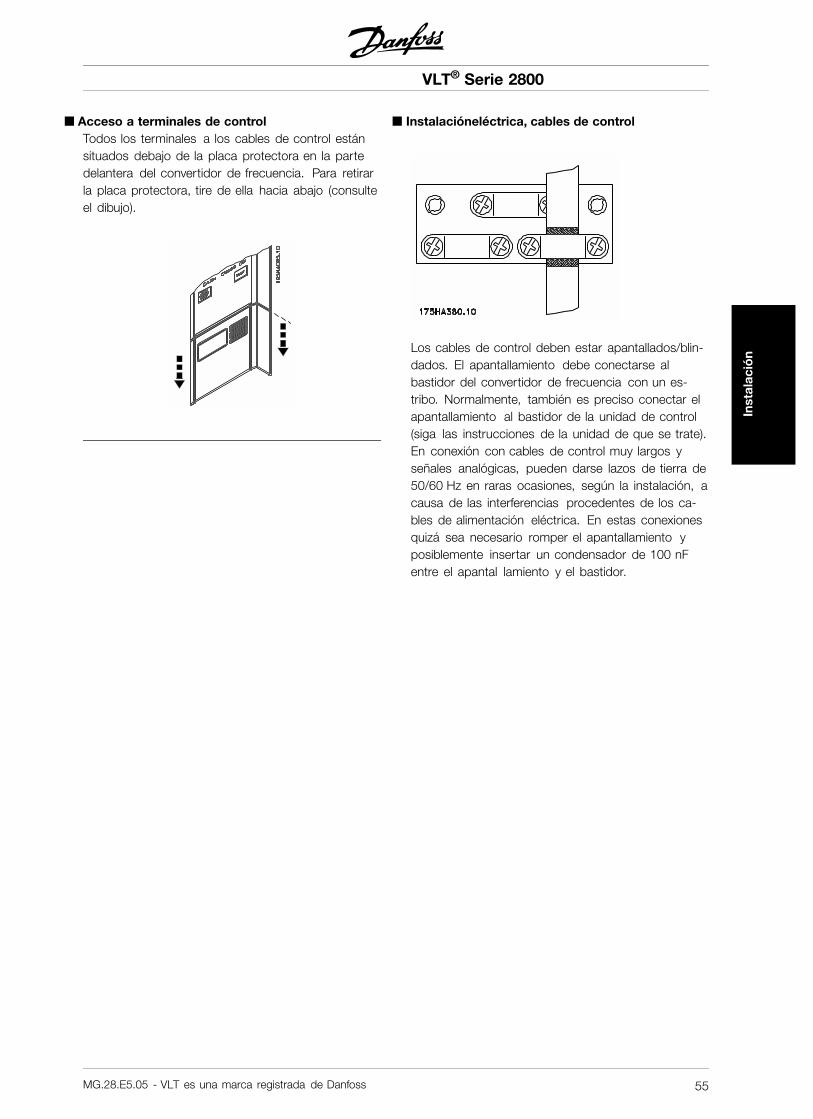
VLT® Serie 2800
■ Acceso a terminales de controlTodos los terminales a los cables de control estánsituados debajo de la placa protectora en la partedelantera del convertidor de frecuencia. Para retirarla placa protectora, tire de ella hacia abajo (consulteel dibujo).
■ Instalacióneléctrica, cables de control
Los cables de control deben estar apantallados/blin-dados. El apantallamiento debe conectarse albastidor del convertidor de frecuencia con un es-tribo. Normalmente, también es preciso conectar elapantallamiento al bastidor de la unidad de control(siga las instrucciones de la unidad de que se trate).En conexión con cables de control muy largos yseñales analógicas, pueden darse lazos de tierra de50/60 Hz en raras ocasiones, según la instalación, acausa de las interferencias procedentes de los ca-bles de alimentación eléctrica. En estas conexionesquizá sea necesario romper el apantallamiento yposiblemente insertar un condensador de 100 nFentre el apantal lamiento y el bastidor.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 55
Inst
alac
ión

VLT® Serie 2800
MG.28.E5.05 - VLT es una marca registrada de Danfoss56

VLT® Serie 2800
■ Instalación eléctrica,terminales de controlConsulte la sección titulada Conexión a tierra de ca-bles de control apantallados en la Guía de Diseñopara ver la terminación correcta de los cables decontrol.
Nº Función01-03 Las salidas de relé 01-03 se puede n
utilizar paraindicar el estado y alarmas/adverten-cias.
12 Alimentación de tensión de 24 V CC.18-33 Entradas digitales.20, 55 Bastidor común para terminales
de entrada y salida.42 Salida analógica para mostrar la fre-
cuencia,la referencia, la intensidad o el par.
461 Salida digital para mostrar el estado,las advertencias o alarmas, así como lasalida de frecuencia.
50 Alimentación de tensión de +10 V CCpara potenciómetro o termistor.
53 Entrada de tensión analógica 0 - 10 VCC.
60 Entrada de intensidad analógica 0/4 -20 mA.
671 Tensión de alimentación de + 5 V CCa Profibus.
68,691
RS 485, comunicación serie.
701 Bastidor para terminales 67, 68 y 69.Normalmente este terminal no debe uti-lizarse.
1. Los terminales no son válidos para DeviceNet/CANopen. Consulte también el manual DeviceNetMG.90.BX.YY para obtener más detalles.
■ Conexión de relésConsulte el parámetro 323 Salida de relé para pro-gramar la salida de relé.
Nº 01 - 02 1 - 2 activa (normalmenteabierta)
01 - 03 1 - 3 inactiva (normalmentecerrada)
¡NOTA!:Tome en cuenta que la funda del cable parael relé debe cubrir la primera fila de termi-
nales de la tarjeta de control – de lo contrario, no semantendrá el aislamiento galvánico (PELV).Diámetro máx. de cable: 4 mm. Consulte el dibujo.
■ Interruptores 1-4El interruptor DIP sólo está en las tarjetas de controlque tengan comunicación Profibus DP.La posición del interruptor que se muestra aquí es elajuste de fábrica.
Los interruptores 1 y 2 se utilizan como terminaciónde cables para la interconexión de RS 485. Si elconvertidor de frecuencia se sitúa como primera oúltima unidad del sistema de bus, los interruptores 1y 2 deben estar en la posición ON. En los demásconvertidores, los interruptores 1 y 2 deben ajus-tarse en OFF.Los interruptores 3 y 4 no se utilizan.
■ VLTSoftwareDialogConexión a terminales 68–70 oSub D:- PIN 3 GND- PIN 8 P-RS 485- PIN 9 N-RS 485
MG.28.E5.05 - VLT es una marca registrada de Danfoss 57
Inst
alac
ión

VLT® Serie 2800
■ Conector D-Sub
Es posible conectar una unidad de control LCP2 alconector D-Sub de la tarjeta de control. Número decódigo: 175N0131.No deben conectarse unidades de control LCP cuyonúmero de código sea 175Z0401.
MG.28.E5.05 - VLT es una marca registrada de Danfoss58

VLT® Serie 2800
■ Ejemplos de conexion
■ Arranque/paradaArranque/parada con el terminal 18 y parada por in-ercia con el terminal 27.
Par. 302 Entrada digital = Arranque [7]Par. 304 Entrada digital = Reset y parada de in-ercia inversa [2]
Para Arranque/parada precisos se pueden realizarlos siguientes ajustes:
Par. 302 Entrada digital = Arranque/parada pre-cisos [27]Par. 304 Entrada digital = Parada de inercia in-versa [2]
■ Arranque/parada de pulsosArranque de pulsos con el terminal 18 y parada depulsos con el terminal 19. Además, la frecuencia develocidad fija se activa en el terminal 29.
Par. 302 Entrada digital = Arranque de pulsos [8]Par. 303 Entrada digital = Parada inversa [6]Par. 304 Entrada digital = Parada de inercia in-versa [2]Par. 305 Entrada digital= Velocidad fija [13]
■ Aceleración/deceleraciónAceleración/deceleración con los terminales 29/33.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 59
Inst
alac
ión

VLT® Serie 2800
Par. 303 Entrada digital = Mantener referencia[14]Par. 305 Entrada digital = Aceleración [16]Par. 307 Entrada digital = Deceleración [17]
■ Referencia de potenciómetroReferencia de tensión mediante un potenciómetro.
Par. 308 Entrada analógica = Referencia [1]Par. 309 Terminal 53, escalado mínimo = 0 voltiosPar. 310 Terminal 53, escalado máximo = 10voltios
■ Conexión de transmisor de 2 hilosConexión de un cable transmisor de 2 hilos comorealimentación al terminal 60.
Par. 314 Entrada analógica = Realimentación [2]Par. 315 Terminal 60, escalado mínimo = 4 mAPar. 316 Terminal 60, escalado máximo = 20 mA
■ Referencia de 4-20 mAReferencia de 4-20 mA en el terminal 60 y señal derealimentación de velocidad en el terminal 53.
Par. 100 Configuración = Velocidad, modo delazo cerrado [1]Par. 308 Entrada analógica = Realimentación [2]Par. 309 Terminal 53, escalado mínimo = 0 voltiosPar. 310 Terminal 53, escalado máximo = 10voltiosPar. 314 Entrada analógica = Referencia [1]Par. 309 Terminal 60, escalado mínimo = 4 mA.Par. 310 Terminal 60, escalado máximo = 20 mA.
■ 50 Hz de dcha. a izqda. hasta 50 Hz de izqda. adcha.
Par. 100 Configuración = Velocidad, modo delazo abierto [0]
MG.28.E5.05 - VLT es una marca registrada de Danfoss60

VLT® Serie 2800
Par. 200 Rango de frecuencia de salida = Ambossentidos, 0-132 Hz [1]Par. 203 Rango de frecuencia = Ref. mín. - Ref.máx. [0]Par. 204 Referencia mínima = - 50 HzPar. 205 Referencia máxima = 50 HzPar. 302 Entrada digital = Arranque [7]Par. 304 Entrada digital = Parada de inercia in-versa [2]Par. 308 Entrada analógica = Referencia [1]Par. 309 Terminal 53, escalado mínimo = 0 voltiosPar. 310 Terminal 53, escalado máximo = 10voltios
■ Referencias internasPuede conmutar entre 8 referencias internas medi-ante dos entradas digitales, el Ajuste 1 y el Ajuste 2.
Par. 004 Ajuste activo = Ajuste múltiple 1 [5]Par. 204 Referencia mínima = 0 HzPar. 205 Referencia máxima = 50 HzPar. 302 Entrada digital = Arranque [7]Par. 303 Entrada digital = Selección de Ajuste,lsb [31]Par. 304 Entrada digital = Parada de inercia in-versa [2]Par. 305 Entrada digital = Referencia interna, lsb[22]Par. 307 Entrada digital = Referencia interna,msb [23]
Ajuste 1 contiene las siguientes referencias internas:Par. 215 Referencia interna 1 = 5,00%.Par. 216 Referencia interna 2 = 10,00%.Par. 217 Referencia interna 3 = 25,00%.Par. 218 Referencia interna 4 = 35,00%.
Ajuste 2 incluye las siguientes referencias internas:Par. 215 Referencia interna 1 = 40,00%.Par. 216 Referencia interna 2 = 50,00%.Par. 217 Referencia interna 3 = 70,00%.Par. 218 Referencia interna 4 = 100,00%.
Esta tabla muestra las frecuencias de salida:
Ref. in-terna,msb
Ref. in-terna, lsb
Selec-ción deAjuste
Frec. de sal-ida [Hz]
0 0 0 2,50 1 0 51 0 0 101 1 0 17,50 0 1 200 1 1 251 0 1 351 1 1 50
■ Conexión del freno mecánico
Parám. 302 Entrada digital = Arranque [7]Parám. 304 Entrada digital = Reset y parada deinercia inversa [2]Parám. 323 Salida de relé = Control de frenomecánico [25]
Control de freno mecánico [25] = ’0’ => Freno cer-rado.Control de freno mecánico [25] = ’1’ => Frenoabierto.Para más información sobre el ajuste de parámet-ros, consulte Control de freno mecánico.
■ Parada de contador con el terminal 33.La señal de arranque (terminal 18) debe estar acti-vada, es decir, debe ser ’1’ lógico, hasta que lafrecuencia de salida sea igual a la referencia. De-spués, la señal de arranque (terminal 18 = ’0’ lógico)deberá suprimirse antes de que el valor de contadordel parámetro 344 pare el convertidor VLT.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 61
Inst
alac
ión

VLT® Serie 2800
Par. 307 Entrada digital = Entrada de pulsos [30]Par. 343 Función de parada precisa = Parada decontador con reset [1]Par. 344 Valor de contador = 100000
MG.28.E5.05 - VLT es una marca registrada de Danfoss62

VLT® Serie 2800
■ Funcionamiento y Display
001001 Idioma
(LENGUAJE)Valor:
✭ Inglés (ENGLISH) [0]Alemán (DEUTSCH) [1]Francés (FRANCAIS) [2]Danés (DANSK) [3]Español (ESPANOL) [4]Italiano (ITALIANO) [5]
Función:Este parámetro sirve para elegir el idioma quemuestra el display cuando se conecte el panel decontrol LCP.
Descripción de opciones:Se muestran los idiomas que se pueden seleccionar.El ajuste de fábrica puede variar.
002002 Control local/remoto
(TIPO DE MANIOBRA)
Valor:✭ Control remoto (REMOTO) [0]
Control local (LOCAL) [1]
Función:Hay la opción de dos modos de funcionamiento dis-tintos del convertidor de frecuencia: Control remoto[0] o Control local [1]. Consulte también elparámetro 013 Modo ref. local si Control local [1] seha seleccionado.
Descripción de opciones:Si se selecciona Control remoto [0], el convertidorde frecuencia se controla mediante:1. Los terminales de control o la comunicación se-
rie.2. La tecla [START]. Sin embargo, esta tecla no
puede anular comandos de parada transmitidospor las entradas digitales o la comunicación serie.
3. Las teclas [STOP/RESET] y [JOG], siempre queestén activadas.
Si se selecciona Control local [1], el convertidor defrecuencia puede controlarse mediante:1. La tecla [START]. Sin embargo, esta tecla no
puede anular comandos de parada transmitidospor las entradas digitales (consulte el parámetro013 Modo ref. local).
2. Las teclas [STOP/RESET] y [JOG], siempre queestén activadas.
3. La tecla [FWD/REV], siempre que se haya selec-cionado como activa en el parámetro 016 Cambiosentido, y el parámetro 013 Modo ref. local estéajustado en Local sin control [1] o Local con con-trol [3]. El parámetro 200 Rango de frecuenciade salida debe ajustarse en Ambos sentidos.
4. El parámetro 003 Referencia local, donde la ref-erencia puede ajustarse con las teclas [+] y [-].
5. Un comando de control externo que puedaconectarse a las entradas digitales (consulte elparámetro 013 Modo ref. local).
¡NOTA!:Las teclas [JOG] y [FWD/REV]están situadas en el panel de control LCP.
003003 Referencia local
(REFERENCIA LOCAL)
Valor:El parámetro 013 Modo ref. local debe ajustarse en[1] o [2]:0 - fMAX (par. 202) ✭ 000.000,000
El parámetro 013 Modo ref. local debe ajustarse en[3] o [4] y el parámetro 203 Reference/feedbackrange en [0]:RefMIN - RefMAX (par. 204-205) ✭ 000.000,000
El parámetro 013 Modo ref. local debe ajustarse en[3] o [4] y el parámetro 203 Reference/feedbackrange en [1]:- RefMAX - + RefMAX (par. 204-205) ✭ 000.000,000
Función:En este parámetro es posible ajustar manualmentela referencia local. La unidad de la referencia localdepende de la configuración seleccionada en elparámetro 100 Configuración.
Descripción de opciones:Para proteger la referencia local, el parámetro 002Tipo de maniobra debe ajustarse en Local [1]. lareferencia local no puede ajustarse mediante la co-municación serie.
■ Configuración de ajustesHay la opción de cuatro Ajustes (ajustes deparámetro) que se pueden programar individual-mente. El Ajuste activo se selecciona en elparámetro 004 Activar ajuste. Cuando hay un panelde control LCP2 conectado, el número del Ajuste ac-tivo se muestra en el display bajo “Ajuste". Tambiénes posible preajustar el convertidor de frecuencia en
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 63
Pro
gra
mac
ión

VLT® Serie 2800
Ajuste múltiple , para que se pueda cambiar deajuste mediante las entradas digitales o la comuni-cación serie. El cambio de ajuste se puede utilizar,por ejemplo, en una planta en que se utiliza unAjuste para las operaciones diurnas y otro para lasoperaciones nocturnas.En el parámetro 006 Copiar ajuste es posible copiarvalores entre los Ajustes. Si se utiliza el parámetro007 Copiar LCP todos los Ajustes se pueden trans-ferir de un convertidor de frecuencia a otro si secambia de ubicación el panel de control LCP2.Primero, todos los valores de parámetros se copianal panel de control LCP2, que después puede mo-verse a otro convertidor de frecuencia. Aquí, todoslos valores de parámetros pueden copiarse delpanel de control LCP2 al convertidor.
■ Cambio de Ajuste
- Selección de Ajuste mediante los terminales 29 y33.
Parám. 305 Entrada digital = Selección deAjuste, lsb [31]Parám. 307 Entrada digital =Selección de Ajuste,msb [32]Parám.004 Activar ajuste = Ajuste múltiple [5]
004004 Activar ajuste
(ACTIVAR AJUSTE)
Valor:Ajuste de fábrica (AJUSTE DE FABRICA) [0]
✭ Ajuste 1 (AJUSTE 1) [1]Ajuste 2 (AJUSTE 2) [2]Ajuste 3 (AJUSTE 3) [3]Ajuste 4 (AJUSTE 4) [4]Ajuste múltiple (AJUSTE MULTIPLE) [5]
Función:Aquí se selecciona el Ajuste de parámetros activo.Todos los parámetros pueden programarse en cua-tro Ajustes individuales. En este parámetro esposible pasar de un Ajuste a otro mediante una en-trada digital o la comunicación serie.
Descripción de opciones:Ajuste de fábrica [0] contiene los valores deparámetro ajustados en fábrica. Ajustes 1-4 [1]-[4]son los cuatro Ajustes individuales que pueden se-leccionarse de la forma requerida. Ajuste múltiple[5] se utiliza cuando hace falta cambiar mediante elcontrol remoto entre los cuatro Ajustes medianteuna entrada digital o la comunicación serie.
005005 Editar ajuste(EDITAR AJUSTE)
Valor:Ajuste de fábrica (AJUSTE DE FABRICA) [0]Ajuste 1 (AJUSTE 1) [1]Ajuste 2 (AJUSTE 2) [2]Ajuste 3 (AJUSTE 3) [3]Ajuste 4 (AJUSTE 4) [4]
✭ Ajuste activo (AJUSTE ACTIVO) [5]
Función:Puede seleccionar el Ajuste que va a programar du-rante el funcionamiento (con el panel de control ocon el puerto de comunicación serie). Por ejemplo,es posible programar Ajuste 2 [2] aunque se hayaseleccionado como ajuste activo el Ajuste 1 [1] en elparámetro 004 Activar ajuste.
Descripción de opciones:Ajuste de fábrica [0] contiene los datos definidos enfábrica y puede utilizarse como fuente de datoscuando es necesario devolver los otros Ajustes a unestado conocido. Ajustes 1-4 [1]-[4] son los ajustesindividuales que se pueden programar durante elfuncionamiento. Si se selecciona Ajuste activo [5], elajuste de programación será idéntico al parámetro004 Activar ajuste.
¡NOTA!:Si se cambian o copian datos en el Ajusteactivo, dichos cambios tendrán un efecto in-
mediato en el funcionamiento de la unidad.
006006 Copiar ajuste
(COPIAR AJUSTE)Valor:
✭ No copiar (NO COPIAR) [0]Copiar al Ajuste 1 de #(COPIAR AL AJUSTE 1 ) [1]Copiar al Ajuste 2 de #(COPIAR AL AJUSTE 2) [2]Copiar al Ajuste 3 de #(COPIAR AL AJUSTE 3) [3]Copiar al Ajuste 4 de #(COPIAR AL AJUSTE 4) [4]
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss64

VLT® Serie 2800
Copiar a todos los Ajustes de # (COPIAR A TO-DOS) [5]
Función:Puede copiar desde el Ajuste activo seleccionado enel parámetro 005 Editar ajuste a los ajustes selec-cionados en este parámetro.
¡NOTA!:La copia sólo es posible en el modode parada (motor parado con un comando de
parada).
Descripción de opciones:La copia comienza tras seleccionar la función decopia deseada y pulsar la tecla [OK]/[CHANGEDATA]. El display indica que hay una copia en curso.
007007 Copiar LCP(COPIAR LCP)
Valor:✭ No copiar (NO COPIAR) [0]
Recuperar parám. (RECUPERAR PARAM.) [1]Volcar parám. (VOLCAR PARAM.) [2]Volcar parámetros independientemente del tamaño(VOLCAR PARAM. INDP.) [3]
Función:El parámetro 007 Copiar LCP se utiliza cuando espreciso hacer uso de la función de copia incorporadaen el panel de control LCP2. Esta función sirve paracopiar todos los ajustes de parámetros de un conver-tidor a otro desplazando el panel de control LCP2.
Descripción de opciones:Seleccione Recuperar parám. [1], si desea transferirtodos los valores de los parámetros al panel de con-trol. Seleccione Volcar parám. [2], si desea copiartodos los valores transferidos al convertidor de fre-cuencia en el que va a instalarse el panel de control.Seleccione Volcar parámetros independientementedel tamaño [3], si sólo desea volcar los parámetrosque sean independientes del tamaño de la unidad.Se utiliza para volcar parámetros en un convertidorcon una potencia nominal distinta a la del conver-tidor de frecuencia en que se creó el ajuste deparámetros.
¡NOTA!:La recuperación y volcado sólo pueden efec-tuarse en el modo de parada. El volcado sólo
se puede realizar en un convertidor que tenga elmismo número de versión de software, consulte elparámetro 626 Nº identificación de base de datos
008008 Fondo escala fr
(FONDO ESCALA FR)
Valor:0,01 - 100,00 ✭ 1,00
Función:En este parámetro se selecciona el factor por el quehay que multiplicar la frecuencia de salida. El valorse muestra en el display si los parámetros 009-012Lectura del displayse han ajustado en Frec. x escala[5].
Descripción de opciones:Ajuste el factor de escala que desee.
009009 Lectura del display amplia
(LINEA DISPLAY 2)
Valor:Sin lectura (NO) [0]Referencia de resultado [%](REFERENCIA [%] ) [1]Referencia de resultado [unidad](REFERENCIA [UNID]) [2]Realimentación [unidad] (REALIMENT A. [UNID]) [3]
✭ Frecuencia [Hz] (FRECUENCIA [HZ]) [4]Frec. salida x escalado(FRECUENCIA X ESCALA) [5]Intensidad del motor [A] (INTENSIDAD DEL MO-TOR [A]) [6]Par [%] (PAR [%]) [7]Potencia [kW] (POTENCIA [KW]) [8]Potencia [HP] (POTENCIA [HP] [US]) [9]Tensión del motor [V](TENSIÓN DEL MOTOR [V] ) [11]Tensión de CC [V](TENSIÓN DE CC [V]) [12]Carga térmica del motor [%](TÉRMICO MOTOR [%]) [13]Carga térmica [%](TÉRMICO FC. [%]) [14]Horas ejecutadas [horas](HORAS EJECUT ADAS] ) [15]Entrada digital [Bin](ENTRADA DIGITAL[BIN] ) [16]Entrada analógica 53 [V](ENTRADA ANALÓGICA 53 [V]) [17]Entrada analógica 60 [mA]
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 65
Pro
gra
mac
ión

VLT® Serie 2800
(ENTRADA ANALÓGICA 60 [MA]) [19]Referencia de pulsos [Hz](REF . PULSOS [HZ] ) [20]Referencia externa [%](REF . EXTERNA [%]) [21]Código de estado [Hex] (CÓDIGO ESTADO [HEX])[22]Temperatura del disipador [�C](TEMP. DISIPADOR [�C]) [25]Código de alarma [Hex] (CÓDIGO ALARMA [HEX])[26]Código de control [Hex] (CÓDIGO DE CONTROL[HEX]) [27]Código de aviso [Hex](CÓDIGO AVISO [HEX] ) [28]Código de estado ampliado [Hex](ESTADO AMPLIADO [HEX]) [29]Aviso de tarjeta de opción de comunicación( COD.ADV.OPT.COM [HEX]) [30]Contador de pulsos(CONT. PULSOS) [31]
Función:En este parámetro, es posible seleccionar el valorde datos que aparecerá en la línea 2 del display delpanel de control LCP al arrancar el convertidor defrecuencia. El valor se incluirá en la barra de de-splazamiento del modo de Display. En losparámetros 010-012 Lectura del display se puedenseleccionar tres valores de datos más, que semostrarán en la línea 1 del display.
Descripción de opciones:Sin lectura sólo puede seleccionarse en losparámetros 010-012 Lectura del display breve.
Referencia de resultado [%] da, en forma de por-centaje, la referencia de resultado en el rangocomprendido entre Referencia mínima, RefMIN y Ref-erencia máxima, RefMAX.
Referencia [unidad] da la referencia de resultado enHz en Lazo abierto. En Lazo cerrado la unidad dereferencia se selecciona en el parámetro 416Unidades de proceso.
Realimentación [unidad] da el valor de señal deresultado en la unidad/escala del parámetro 414 Re-alimentación mínima, RABAJA, 415 Realimentaciónmáxima, RAALTA y 416 Unidades de proceso.
Frecuencia [Hz] da la frecuencia de salida del con-vertidor.
Frecuencia de salida x escalado [-] es igual a la fre-cuencia de salida actual fM multiplicado por el factorajustado en el parámetro 008 Mostrar escala fre-cuencia de salida .
Intensidad del motor [A] da la intensidad de fase delmotor medida como un valor real.
Par [%] indica la carga actual del motor en relacióncon su par nominal.
Potencia [kW] da la potencia actual absorbida por elmotor en kW.
Potencia [HP] da la potencia actual absorbida por elmotor en HP.
Tensión del motor [V] da la tensión suministrada almotor.
Tensión de CC [V] da la tensión del circuito interme-dio del convertidor.
Carga térmica del motor [%] da la carga térmica cal-culada/estimada en el motor. El valor de 100 % esel límite de desconexión.
Carga térmica [%] da la carga térmica calculada enel convertidor de frecuencia. El valor de 100 % es ellímite de desconexión.
Horas ejecutadas [horas] da el número de horas queha funcionado el motor desde el último reset en elparámetro 619 Reset contador de horas ejecutadas.
Entrada digital [Binario] da el estado de señal de las5 entradas digitales (18, 19, 27, 29 y 33). El termi-nal 18 corresponde al bit del extremo izquierdo. 0` ’= sin señal, 1` ’ = señal conectada.
Entrada analógica 53 [V] da el valor de tensión delterminal 53.
Entrada analógica 60 [mA] da el valor actual del ter-minal 60.
Referencia de pulsos [Hz] da la referencia en Hzconectada al terminal 33.
Referencia externa [%] da la suma de las referen-cias externas en forma de porcentaje (suma deanalógica/pulsos/comunicación serie) en el rangoentre Referencia mínima, RefMIN y Referencia máx-ima, RefMAX.
Código de estado [Hex] da una o varias condicionesde estado en código hexadecimal. Consulte Comu-nicación serie en la Guía de Diseño para másinformación.
Temperatura del disipador [�C] da la temperatura ac-tual del disipador de calor del convertidor. El límite
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss66

VLT® Serie 2800
de desconexión es 90-100 �C, mientras que la re-conexión ocurre a 70 ± 5 �C.
Código de alarma [Hex] da una o varias alarmas encódigo hexadecimal. Consulte Comunicación serieen la Guía de Diseño para más información.
Código de control [Hex] da el código de control delconvertidor de frecuencia. Consulte Comunicaciónserie en la Guía de Diseño para más información.
Código de aviso [Hex] da uno o varios códigos deaviso en código hexadecimal. Consulte Comuni-cación serie en la Guía de Diseño para másinformación.
Código de estado ampliado [Hex] da uno o variosmodos de estado en un código hexadecimal. Con-sulte Comunicación serie en la Guía de Diseñopara más información.
Aviso de tarjeta de opción de comunicaciones [Hex]da un código de aviso si ocurre un fallo en el bus decomunicación. Sólo está activado si ha instalado lasopciones de comunicación.Si no hay opciones de comunicación, se muestra 0Hex en el display.
Contador de pulsos da el número de pulsos que haregistrado el convertidor.
010010 Lectura del display breve 1,1(LINEA DISPL. 1,1)
Valor:Consulte el parám. 009 Lectura del display amplia
✭ Referencia [%] [1]
Función:En este parámetro, es posible seleccionar el primerode tres valores de dato que se mostrarán en el dis-play del panel de control LCP, línea 1, posición 1.Es una función muy útil, por ejemplo, cuando seajusta el controlador PID, pues permite ver las reac-ciones del proceso ante los cambios de referencia.La lectura del display se activa pulsando la tecla[DISPLA Y STATUS].
Descripción de opciones:Consulte el parámetro 009 Lectura del display am-plia.
011011 Lectura del display breve 1,2
(LINEA DISP. 1,2)Valor:
Consulte el parám. 009 Lectura del display amplia✭ Intensidad motor [A] [6]
Función:Consulte la descripción de funciones del parámetro010 Lectura del display breve.
Descripción de opciones:Consulte el parámetro 009 Lectura del display breve.
012012 Lectura del display breve 1,3
(LINEA DISP. 1,3)
Valor:Consulte el parám. 009 Lectura del display amplia
✭ Potencia [kW] [8]
Función:Consulte la descripción de funciones del parámetro010 Lectura del display breve.
Descripción de opciones:Consulte el parámetro 009 Lectura del display am-plia.
013013 Modo ref. local
(MODO REF. LOCAL)
Valor:No (NO) [0]Local sin control(LOCAL SIN CONTROL) [1]Local mix con contr.(LOC-MIX CON CONTR. ) [2]Local con control(LOCAL CON CONTROL ) [3]
✭ Local mix con contr.(LOCAL-MIX CON CONTR.) [4]
Función:Aquí es donde se selecciona la función necesaria sien el parámetro 002 Tipo de maniobra se ha selec-cionado Local [1].
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 67
Pro
gra
mac
ión

VLT® Serie 2800
Descripción de opciones:Cuando se selecciona No [0], no es posible ajustaruna referencia con el parámetro 003 Referencia lo-cal.Para poder pasar a No [0], el parámetro 002 Tipo demaniobra debe ajustarse enRemoto [0].
Local sin control [1] sirve para ajustar la velocidaddel motor con el parámetro 003 Referencia local.Cuando se elige esta opción, el parámetro 100 Con-figuración pasa automáticamente a Lazo abiertoveloc. [0].
Local mix sin contr. [2] funciona del mismo modoque Local sin control [1]; sin embargo, el convertidorde frecuencia también puede controlarse a través delas entradas digitales.
Local con control [3] sirve para ajustar la velocidaddel motor con el parámetro 003 Referencia local,pero sin que el parámetro 100 Configuración paseautomáticamente a Lazo abierto veloc. [0].
Local mix con contr. [4] funciona igual que Localcon control [3]; sin embargo, el convertidor de fre-cuencia también puede controlarse mediante lasentradas digitales.
Si se pasa de Remoto a Local en el parámetro 002Tipo de maniobra, habiendo ajustado esteparámetro en Local mix sin contr. [1]: Se manten-drán la frecuencia y el sentido de giro actuales delmotor. Si el sentido de giro actual no responde a laseñal de cambio de sentido de giro (referencia nega-tiva), la referencia se ajustará en 0.
Si se pasa de Local a Remoto en el parámetro 002Tipo de maniobra, habiendo ajustado esteparámetro en Local mix sin contr. [1]: Se activará laconfiguración seleccionada en el parámetro 100Configuración. El cambio será uniforme.
Si se pasa de Remoto a Local en el parámetro 002Tipo de maniobra, habiendo ajustado esteparámetro en Local mix con contr. [4]: Se manten-drá la referencia actual. Si la señal de referencia esnegativa, la referencia local se ajustará en 0.
Si se pasa de Local a Remoto en el parámetro 002Tipo de maniobra, habiendo ajustado este parámetro
en Remote operation: La señal de referencia contro-lada a distancia sustituirá a la referencia local.
014014 Parada local
(PARADA LOCAL)Valor:No (NO) [0]
✭ Sí (SÍ) [1]
Función:En este parámetro es posible activar y desactivar latecla [STOP] local del panel de control y del panelde control LCP.
Descripción de opciones:Si en este parámetro se selecciona No [0], se de-sactivará la tecla [STOP].
¡NOTA!:Si se selecciona No [0], el mo-tor no podrá detenerse con la tecla [STOP].
015015 Veloc. fija local
(VELOC. FIJA LOCAL)Valor:
✭ No (NO) [0]Sí (SÍ) [1]
Función:En este parámetro es posible activar o desactivar lafunción de velocidad fija del panel de control LCP.
Descripción de opciones:Si en este parámetro se selecciona No [0], se de-sactivará la tecla [JOG].
016016 Cambio sentido
(CAMBIO SENTIDO)Valor:
✭ No (NO) [0]Sí (SI) [1]
Función:En este parámetro es posible seleccionar o deselec-cionar la función de cambio del sentido de giromediante el panel de control LCP. La tecla sólo sepuede utilizar si el parámetro 002 Control local/re-moto se ha ajustado en Control local [1] y elparámetro 013 Modo ref. local se ha ajustado en Lo-cal sin control [1] o Local con control [3].
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss68

VLT® Serie 2800
Descripción de opciones:Si se selecciona No [0] en este parámetro, la tecla[FWD/REV] se desactivará. Consulte también elparámetro 200 Rango de frecuencia de salida.
017017 Reset local(RESET LOCAL )
Valor:No (NO) [0]
✭ Sí (SÍ) [1]
Función:En este parámetro es posible activar y desactivar lafunción de reset del panel de control.
Descripción de opciones:Si en este parámetro se selecciona No [0], la fun-ción de reset permanecerá inactiva.
¡NOTA!:Seleccione No [0] únicamente si se ha conec-tado una señal de reset externa mediante las
entradas digitales.
018018 Bloqueo paramet.
(BLOQUEO PARAMET.)Valor:
✭ Desbloqueado (DESBLOQUEADO) [0]Bloqueado (BLOQUEADO) [1]
Función:En este parámetro es posible ’bloquear’ los con-troles para desactivar cambios de datos mediantelas teclas de control.
Descripción de opciones:Cuando se selecciona Bloqueado [1], no es posiblecambiar datos en los parámetros; sin embargo síserá posible realizar cambios por comunicación se-rie. Los parámetros 009-012 Lectura del displaypueden modificarse con el panel de control.
019019 Modo de arranque(MODO DE ARRANQUE)
Valor:Rearranque automat(REARRANQUE AUTOMAT ) [0]
✭ Local=Parada-Ref (LOCAL=PARADA-REF .) [1]Local=Parada-Ref=0 (LOCAL=PARADA, REF=0)[2]
Función:Ajusta el modo de funcionamiento deseado cuandose conecta la tensión de la red. Esta función sólo
puede activarse si se ha seleccionado Local [1] enel parámetro 002 Tipo de maniobra.
Descripción de opciones:Rearranque automat [0] sirve para arrancar el con-vertidor de frecuencia con la referencia local(ajustada en el parámetro 003 Referencia local) y elestado de arranque/paro proporcionado con lasteclas de control inmediatamente antes de de-sconectar la tensión de la red.Local=Parada-Ref. [1] se selecciona para que elconvertidor de frecuencia permanezca parado alconectar la tensión de la red hasta que se active latecla [START]. Después del comando de arranque,aumentará la velocidad del motor hasta la referenciaalmacenada en el parámetro 003 Referencia local.Local=Parada-Ref.=0 [2] sirve para que el conver-tidor de frecuencia permanezca parado al volverconectarse la tensión de la red. El parámetro 003Referencia local debe ponerse a cero.
¡NOTA!:En funcionamiento remoto (parámetro 002Tipo de maniobra), el estado de arranque/
paro en el momento de la conexión de la ali-mentación dependerá de las señales de controlexternas. Si se selecciona Pulse start [8] en elparámetro 302Digital input, el motor permaneceráparado después de conectar el suministro eléctrico.
020020 Bloqueo del modo manual
(BLOQ. MODO MANUAL)Valor:No activo (NO) [0]
✭ Activo (SÍ) [1]
Función:En este parámetro puede seleccionar si desea hacerposible el cambio entre los modos automático ymanual. En modo automático, el convertidor de fre-cuencia se controla mediante señales externas,mientras que en modo manual se controla medianteuna referencia local directamente desde la unidadde control.
Descripción de opciones:Si en este parámetro se selecciona No [0], la fun-ción de modo manual permanecerá inactiva. Elbloqueo se puede activar a voluntad. Si se selec-ciona Sí [1], podrá cambiar entre ambos modos.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 69
Pro
gra
mac
ión

VLT® Serie 2800
Para obtener más información, consulte la secciónUnidad de control.
024024 Menú rápido definido por el usuario
(MENÚ RÁPIDO USUARIO)Valor:
✭ No activo (NO) [0]Activo (SÍ) [1]
Función:En este parámetro, se puede salir del ajuste normalde la tecla Quick Menu del panel de control y delpanel LCP2.Con esta función, en el parámetro 025 Ajuste deMenú Rápido el usuario puede elegir hasta 20parámetros distintos para la tecla Quick Menu.
Descripción de opciones:Si se selecciona No [0], estará activado el ajustenormal de la tecla Quick Menu.Si se selecciona Sí [1], estará activado el MenúRápido definido por el usuario.
025025 Ajuste de Menú Rápido(AJUSTE DE MENÚ RÁPIDO)
Valor:[Indice 1 -20] Valor: 0 - 999 ✭ 000
Función:En este parámetro, se definen los que se requierenen el Menú Rápido cuando el parámetro 024 MenúRápido del usuario se ha ajustado en Sí [1].́Es posible elegir hasta 20 parámetros para el MenúRápido definido por el usuario.
¡NOTA!:Tenga en cuenta que este parámetro sólo sepuede ajustar con un panel de control LCP2.
Consulte Formulario de pedido .
Descripción de opciones:El Menú Rápido se ajusta de la siguiente manera:1. Seleccione el parámetro 025 Ajuste de Menú
Rápido y pulse [CHANGE DATA].2. El índice 1 indica el primer parámetro del Menú
Rápido. Puede desplazarse por los números deíndice con las teclas [+ / -]. Seleccione el índice1.
3. Utilizando [< >] puede desplazarse por las trescifras. Pulse la tecla [<] una vez y la última cifradel número de parámetro podrá elegirse con lasteclas [+ / -].
Ajuste el índice 1 en 100 para el parámetro 100Configuración.
4. Pulse [OK] cuando el índice 1 esté ajustado en100.
5. Repita los pasos 2 - 4 hasta que todos losparámetros que desee se hayan ajustado para latecla Quick Menu.
6. Pulse [OK] para terminar el ajuste del MenúRápido.
Si el parámetro 100 Configuración se seleccionapara el índice 1, el Menú Rápido comenzará coneste parámetro cada vez que se active la teclaQuick Menu.
Tenga en cuenta que el parámetro 024 MenúRápido del usuario y el parámetro 025 Ajuste deMenú Rápido se restablecen en los ajustes defábrica durante la inicialización.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss70

VLT® Serie 2800
■ Carga y Motor
■ ConfiguraciónLa selección de las características de configuracióny par tiene efecto en los parámetros que es posiblever en el display. Si se selecciona Lazo abierto [0],todos los parámetros relativos a la regulación PIDse omiten. Esto significa que el usuario sólo visual-iza los parámetros que tienen relación con unadeterminada aplicación.
100100 Configuración(CONFIGURACION)
Valor:✭ Velocidad, modo en lazo abierto
(LAZO ABIERTO VELOC.) [0]Velocidad, modo en lazo cerrado(LAZO CERRADO VELOC.) [1]Proceso, modo en lazo cerrado(LAZO CERRADO PROCESO) [3]
Función:Este parámetro se utiliza para seleccionar la config-uración a que se va a adaptar el convertidor.Permite simplificar la adaptación a aplicaciones de-terminadas, ya que los parámetros no utilizados enla configuración permanecen ocultos (inactivos).
Descripción de opciones:Si se selecciona Velocidad, modo en lazo abierto[0], se obtiene un control normal de la velocidad (sinseñal de realimentación), con compensación au-tomática de la carga y el deslizamiento, a fin deasegurar una velocidad constante en cargas distin-tas. La compensaciones están activadas, pero esposible desactivarlas en el parámetro 134 Compen-sación de carga y el parámetro 136 Compensaciónde deslizamiento, según sea necesario.
Si se ha seleccionado Velocidad, modo en lazo cer-rado [1], se obtiene una velocidad más precisa. Esnecesario añadir una señal de realimentación yajustar el controlador PID en el grupo de parámetros400 Funciones especiales.
Si se selecciona Proceso, modo en lazo cerrado [3],el controlador de proceso interno se activa para per-mitir el control preciso respecto a una determinadaseñal de proceso. Esta señal se puede ajustar en launidad correspondiente o en forma de porcentaje.Es necesario añadir una señal de realimentación del
proceso y también ajustar el controlador PID en elgrupo de parámetros 400 Funciones especiales.
101101 Características de par
(TIPO DE PAR)Valor:
✭ Par constante(PAR-CONSTANTE) [1]Par variable bajo(PAR VARIABLE: BAJO) [2]Par variable medio(PAR VARIABLE: MED.) [3]Par variable alto(PAR VARIABLE: ALTO) [4]Par variable bajo con arranque CT(PAR-CT-VT BAJO) [5]Par variable medio con arranque CT(PAR-CT-VT MEDIO) [6]Par variable alto con arranque CT(PAR-CT-VT ALTO) [7]Modo de motor especial(PAR-MOTOR ESPEC.) [8]
✭ CT = Par constante
Función:Este parámetro permite seleccionar el principio paraadaptar la característica U/f del convertidor de fre-cuencia de acuerdo con las características de parde la carga. Consulte el parám. 135 Relación U/f.
Descripción de opciones:Si se selecciona Par constante [1], se obtiene unacaracterística U/f dependiente de la carga en que latensión y la frecuencia de salida aumentan alincrementarse la carga, a fin de mantener la magne-tización constante del motor.
Seleccione Par variable bajo [2], Par variable medio[3] o Par variable alto [4], si la carga es cuadrática(bombas centrífugas y ventiladores).Par variable - bajo con arranque CT [5], - medio conarranque CT [6] o alto con arranque CT [7], se se-leccionan si se necesita un par de desconexiónmayor que el que puede obtener con las tresprimeras características.
¡NOTA!:La compensación de la carga y el desliza-miento no está activada si se ha seleccionado
un par variable o el modo de motor especial.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 71
Pro
gra
mac
ión

VLT® Serie 2800
Seleccione Modo de motor especial [8], si se nece-sita un ajuste de U/f especial para adaptar el motor.Los puntos de interrupción se ajustan en losparámetros 423-428 Tensión/frecuencia.
¡NOTA!:Tenga presente que si se modifica algún valorajustado en los parámetros 102-106 de la
placa de características, cambiará automáticamenteel parámetro 108 Resistencia del estátor y 109 Re-actancia del estátor.
102102 Potencia del motor PM,N
(POTENCIA MOTOR)
Valor:0,25 - 11 kW ✭ Depende de la unidad
Función:Aquí se debe ajustar el valor de potencia [kW] PM,N,que corresponde a la potencia nominal del motor. Enfábrica, se habrá establecido un valor de potencianominal [kW] PM,N, que depende del tipo de motor.
Descripción de opciones:Ajuste el valor que corresponde al dato de la placade características del motor. También pueden servirlos valores de tamaño inmediatamente inferior y su-perior al ajuste de fábrica.
103103 Tensión del motor UM,N
(TENSION MOTOR)Valor:
Para unidades de 200 V: 50 - 999 V ✭ 230 V
Para unidades de 400 V: 50 - 999 V ✭ 400 V
Función:En este parámetro se ajusta la tensión nominal delmotor UM,N para su conexión en estrella Y o trián-gulo �.
Descripción de opciones:Seleccione un valor que corresponda a los datos dela placa de características del motor, independiente-mente de la tensión de red del convertidor defrecuencia.
104104 Frecuencia del motor fM,N
(FRECUENCIA MOTOR)
Valor:24-1000 Hz ✭ 50 Hz
Función:Aquí es donde se selecciona la frecuencia nominalfM,N del motor.
Descripción de opciones:Seleccione el valor que corresponde a los datos dela placa de características del motor.
105105 Intensidad del motor IM,N
(INTENSIDAD MOTOR)Valor:
0,01 - IMAX ✭ Depende del motor seleccionado
Función:La intensidad nominal IM,N del motor forma parte delos cálculos que realiza el convertidor de frecuenciade funciones como el par y la protección térmica dedicho motor.
Descripción de opciones:Seleccione el valor que corresponde a los datos dela placa de características del motor. Ajuste la inten-sidad IM,N del motor tomando en cuenta si estáconectado en estrella Y o en triángulo �.
106106 Velocidad nominal del motor
(VELOC.NOM.MOTOR)
Valor:100 - fM,N x 60 (máx. 60.000 rpm)✭ Depende del parámetro 102 Potencia del motor,PM,N
Función:Aquí se selecciona el valor que corresponde a la ve-locidad nominal del motor nM,N, en la placa decaracterísticas del mismo.
Descripción de opciones:Seleccione el valor que corresponde a los datos dela placa de características del motor.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss72

VLT® Serie 2800
¡NOTA!:El valor máximo es igual a fM,N x 60. fM,N, quese ajusta en el parámetro 104 Frecuencia del
motor, fM,N.
107107 Adaptación automática del motor, AMT
(ADAP AUTO MOT.)
Valor:✭ Autoajuste desactivado (DESCONEXIÓN AMT) [ 0]
Optimización conect. (CONEXIÓN AMT) [ 2]
¡NOTA!:La AMT no se puede llevar a cabo en VLT
2880-82
Función:
La adaptación automática del motor es un algoritmoque mide la resistencia del estator RS sin que gire eleje del motor. Esto significa que el motor no sumin-istra un par.La adaptación AMT es muy útil para inicializar lasunidades cuando el usuario desea optimizar elajuste del convertidor de frecuencia al motor uti-lizado. Se utiliza, especialmente, cuando los ajustesde fábrica no son suficientes para el motor.
Para obtener la mejor adaptación posible del conver-tidor de frecuencia, se recomienda realizar laadaptación AMT con el motor frío. Debe tener encuenta que adaptaciones AMT repetidas puedencausar el calentamiento del motor, lo que aumentarála resistencia del estator RS. Sin embargo, esto nor-malmente no suele ser crítico.
La adaptación AMT se realiza de la siguiente man-era:
Iniciar la AMT:1. Envíe una señal de PARO.2. El parámetro 107 Adaptación automática del
motor debe estar ajustado en el valor[2] Opti-mización conect..
3. Se emite una señal de ARRANQUE y elparámetro 107 Adaptación automática del motorse reinicia en [0] cuando la adaptación AMT hafinalizado.
Completar la AMT:La adaptación AMT finaliza cuando se envía unaseñal de RESET . El parámetro 108 Resistencia es-tator, Rs se actualiza con el valor optimizado.
Interrumpir la AMT:
La adaptación AMT se puede interrumpir en el pro-cedimiento de optimización si se envía una señal dePARO.
Al utilizar la función AMT deben observarse los sigu-ientes puntos:- Para que la adaptación AMT pueda definir los
parámetros del motor lo más correctamente posi-ble, es necesario haber introducido los datoscorrectos de la placa de características del motorconectado al convertidor de frecuencia en losparámetros 102 a 106.
- Se mostrarán alarmas en el display si ocurren fal-los durante la adaptación del motor.
- Como regla general, la función AMT puede medirlos valores RS de motores con un tamaño 1 o 2veces superior o inferior al tamaño nominal delconvertidor de frecuencia.
- Si desea interrumpir la adaptación automática delmotor, pulse la tecla [STOP/RESET].
¡NOTA!:La función AMT no puede realizarse conmotores conectados en paralelo, y tampoco
pueden efectuarse cambios en los ajustes durante laadaptación.Procedimiento para la adaptación AMT desde elSLCP:
Consulte la sección titulada Unidad de control.
Descripción de opciones:Seleccione Optimización conect. [2] si desea que elconvertidor de frecuencia realice la adaptación au-tomática del motor.
108108 Resistencia del estátor RS
(RESIST. ESTATOR)
Valor:0,000 - X,XXX
✭ Depende del motor seleccionado
Función:Después de ajustar los parámetros 102-106 Datosde placa de características, se realiza automática-mente el ajuste de varios parámetros, incluyendo laresistencia del estátor RS. El valor introducido man-ualmente de RS debe corresponder al motor frío. Elrendimiento del eje se puede mejorar si se ajustancon precisión RS y XS, consulte el procedimiento acontinuación.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 73
Pro
gra
mac
ión

VLT® Serie 2800
¡NOTA!:Los parámetros 108 Resistencia del estatorRS y 109 Reactancia del estátor XS no suelen
modificarse cuando se han ajustado los datos de laplaca de características.
Descripción de opciones:RS puede ajustarse de la siguiente manera:
1. Utilice los ajustes de fábrica de RS que elige au-tomáticamente el convertidor de frecuencia segúnlos datos de la placa de características del motor.
2. El valor está definido por el proveedor del motor.3. El valor se obtiene mediante una medición man-
ual: RS puede calcularse midiendo la resistenciaRFASE-A-FASE entre dos terminales de fase. SiRFASE-A-FASE es menor que 1-2 ohmios (típico enmotores > 5,5 kW, 400 V), debe utilizarse unohmímetro especial (Thomson-bridge o similar).RS = 0,5 x RFASE-A-FASE
4. RS se ajusta automáticamente cuando ha final-izado la adaptación AMT. Consulte el parámetro107 Adaptación automática del motor.
109109 Reactancia estátor XS
(REACT. ESTATOR)
Valor:0,00 - X,XX
✭ Depende del motor seleccionado
Función:Después de definir los parámetros 102-106 deDatos de la placa de características, se ajustan au-tomáticamente varios parámetros, incluyendo lareactancia del estátor XS. El funcionamiento del ejepuede mejorarse si se ajusta con precisión RS y XS;consulte el siguiente procedimiento.
Descripción de opciones:XS puede ajustarse de la siguiente manera:
1. El valor está definido por el proveedor del motor.2. El valor se obtiene mediante una medición man-
ual. XS se calcula conectando el motor alsuministro de red, y midiendo la tensión de fasea fase UM y la intensidad en vacío �.Xs =
Ump3xI�
3. Utilice los ajustes de fábrica de XS seleccionadospor el convertidor de frecuencia a partir de losdatos de la placa de características del motor.
119119 Parde arranque alto
(ALTO PAR ARRANQ.)
Valor:0,0 - 0,5 seg ✭ 0,0 seg
Función:Para asegurar un alto par de arranque, se permite1,8 x IINV aprox. por un máximo de 0,5 seg. Sin em-bargo, la intensidad está restringida por el límite deseguridad del convertidor de frecuencia (inversor).Con el valor 0 seg no hay par de arranque alto.
Descripción de opciones:Ajuste el tiempo necesario para el que se requiereun par de arranque alto.
120120 Retraso de arranque
(RETARDO ARRANQ.)Valor:
0,0 - 10,0 seg ✭ 0,0 seg
Función:Este parámetro activa el retraso del tiempo de ar-ranque después de que se hayan cumplido lascondiciones de arranque. Cuando ha transcurrido elcorrespondiente período de tiempo, la frecuencia desalida empieza a acelerar hasta la referencia.
Descripción de opciones:Ajuste el tiempo necesario después del que debecomenzar la aceleración.
121121 Función de arranque
(FUNCION ARRANQ.)Valor:CC mantenida en retraso de arranque(C.C MANTENIDA/ RET) [0]Freno de CC en retraso de arranque(FRENO C.C/RETARDO ) [1]
✭ Inercia en retraso de arranque(INERCIA/ RETARDO) [2]Frec./tensión de arranque en mismo sentido(FUNC. HORIZONT AL) [3]Frec./tensión de arranque en sentido de referencia(FUNC. VERTICAL ) [4]
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss74

VLT® Serie 2800
Función:Aquí se selecciona el modo deseado durante elperíodo de retraso del arranque (parámetro 120 Re-traso del arranque).
Descripción de opciones:Seleccione CC mantenida en retraso de arranque[0] para energizar el motor con una corriente de CCmantenida durante el tiempo de retraso de arranque.Ajuste la tensión en el parámetro 137 Tensión deCC mantenida.
Seleccione Freno de CC en retraso de arranque [1]para energizar el motor con una tensión de freno deCC durante el retraso del arranque. Ajuste la ten-sión en el parámetro 132 Tensión de freno de CC.
Seleccione Inercia en retraso de arranque [2] paraque el motor no esté controlado por el convertidorde frecuencia durante el tiempo de retraso de ar-ranque (inversor desconectado).
SeleccioneFrecuencia/tensión de arranque enmismo sentido [3] para obtener la función explicadaen los parámetros 130 Frecuencia de arranque y131 Tensión de arranque durante el tiempo de re-traso de arranque.Esta función se utiliza típicamente en aplicacionesde elevación. Por lo general, en aplicaciones en quese aplica un motor con rotor cónico, en que el sen-tido de giro debe empezar de derecha a izquierda, ycontinuar en la dirección de la referencia.
Seleccione Frec./tensión de arranque en sentido dereferencia [4] para obtener la función explicada enlos parámetros 130 Frecuencia de arranque y 131Tensión de arranque durante el tiempo de retraso dearranque.Independientemente del valor asumido por la señalde referencia, la frecuencia de salida es igual alajuste del parámetro 130 Frecuencia de arranque yla tensión de salida corresponde al ajuste delparámetro 131 Tensión de arranque. El sentido degiro del motor siempre continuará en la dirección dela referencia. Si la señal de referencia es cero, lafrecuencia de salida será 0 Hz, mientras que la ten-sión de salida corresponderá al valor en elparámetro 131 Tensión de arranque. Si la señal dereferencia es distinta de cero, la frecuencia de salidaserá igual al parámetro 130 Frecuencia de arranquey la tensión de salida será igual al parámetro 131Tensión de arranque. Esta función se utiliza normal-mente en aplicaciones de elevación con contrapeso.Por lo general, se utiliza en aplicaciones en que seutiliza un motor de rotor cónico. Este motor puede
hacerse arrancar con los parámetros 130 Frecuen-cia de arranque y 131 Tensión de arranque.
122122 Función en parada
(FUNCION PARADA)Valor:
✭ Inercia (INERCIA) [0]CC mantenida (C.C MANTENIDA) [1]
Función:Aquí se selecciona la función del convertidor de fre-cuencia cuando la frecuencia de salida ha pasado aser inferior al valor en el parámetro 123 Frec. mín.para activar la función en parada o después de unaorden de parada, y cuando la frecuencia de salidase ha reducido hasta 0 Hz.
Descripción de opciones:Seleccione Inercia [0] si el convertidor de frecuenciadebe ’soltar’ el motor (inversor desconectado).
Seleccione CC mantenida [1] si el parámetro 137Tensión de CC mantenida debe activarse.
123123 Frec. mín. para activar la función deparada
(FREC.MIN.PARADA)Valor:
0,1 - 10 Hz ✭ 0,1 Hz
Función:En este parámetro, se ajusta la frecuencia de salidaen que la función seleccionada en el parámetro 122Función de parada debe activarse.
Descripción de opciones:Ajuste la frecuencia de salida requerida.
■ Frenado de CCDurante el frenado de CC, se suministra tensión deCC al motor, lo que causa que se detenga el eje delmismo. En el parámetro 132 Tensión de freno deCC, la tensión del freno de CC se puede preajustaren 0-100%. La tensión de freno de CC máxima de-pende de los datos del motor seleccionado.En el parámetro 126 Tiempo de frenado de CC sedetermina este tiempo de frenado de CC, y en elparámetro 127 Frecuencia de entrada del freno deCC se selecciona la frecuencia a la que se activa elfrenado de CC. Si se programa una entrada digitalen Frenado de CC inverso [5] y ésta cambia de ’1’
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 75
Pro
gra
mac
ión

VLT® Serie 2800
lógico a ’0’ lógico, se activará el frenado de CC.Cuando se activa un comando de parada, el frenadode CC se activará cuando la frecuencia de salidasea menor que la frecuencia de entrada del freno.
¡NOTA!:El frenado de CC no se puede utilizar sila inercia en el eje del motor es superior a 20
veces la inercia interna del motor.
126126 Tiempo de frenado de CC
(TIEMPO FRENO C.C)
Valor:0 - 60 seg ✭ 10 seg
Función:En este parámetro, se ajusta el tiempo de frenadode CC en que el parámetro 132 Tensión de freno deCC deberá activarse.
Descripción de opciones:Ajuste el tiempo deseado.
127127 Frecuencia de entrada del freno de CC
(FREC. FRENO C.C)
Valor:0,0 (NO) - parám. 202 Frecuencia máxima, fMAX✭ NO
Función:En este parámetro, se ajusta la frecuencia de en-trada en que se activará el freno de CC en relacióncon una orden de parada.
Descripción de opciones:Ajuste la frecuencia requerida.
128128 Protección térmica del motor
(PROTEC TERMICA MOTOR)
Valor:✭ Sin protección (SIN PROTECCIÓN) [0]
Advertencia del termistor(ADV. TERMISTOR) [1]Desconexión del termistor (DESCON. TERMIS-TOR) [2]Advertencia ETR 1 (ADV. ETR 1) [3]Desconexión ETR 1 (DESCON. ETR 1) [4]Advertencia ETR 2 (ADV. ETR 2) [5]Desconexión ETR 2 (DESCON. ETR 2) [6]Advertencia ETR 3 (ADV. ETR 3) [7]Desconexión ETR 3 (DESCON. ETR 3) [8]Advertencia ETR 4 (ADV. ETR 4) [9]Desconexión ETR 4 (DESCON. ETR 4) [10]
Función:El convertidor de frecuencia puede controlar la tem-peratura del motor de dos maneras distintas:
- Me diante un termistor PTC que se monta en elmotor. Este termistor se conecta entre el terminal50 (+10V) y uno de los terminales de entradadigital 18, 19, 27 o 29. Consulte el parámetro300 Entradas digitales.
- Cálculo de la carga térmica (ETR - relé térmicoelectrónico), basado en la carga y espacio detiempo actuales. Se compara con la intensidadIM,N y la frecuencia nominales del motor f M,N.Los cálculos consideran la necesidad de menoscarga a velocidades más bajas, por lo que se re-duce la ventilación interna del motor.
Las funciones ETR 1-4 no empiezan a calcular lacarga hasta que se pasa al Ajuste en que se hanseleccionado. Esto significa que se puede utilizaruna función ETR incluso cuando se cambie entredos o más motores.
Descripción de opciones:Seleccione Sin protección [0] si no desea una adver-tencia o una desconexión cuando se sobrecargue elmotor.Seleccione Advertencia del termistor [1] si deseauna advertencia cuando el termistor conectado sesobrecaliente.Seleccione Desconexión del termistor [2] si deseaque ocurra una desconexión cuando el termistorconectado se sobrecaliente.Seleccione Advertencia ETR si desea una adverten-cia cuando se calcule que el motor estásobrecargado. También puede programar el conver-tidor de frecuencia para que emita una señal deadvertencia mediante una de las salidas digitales.Seleccione Desconexión ETR si desea una de-sconexión del motor cuando se sobrecargue segúnlos cálculos.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss76

VLT® Serie 2800
Seleccione Advertencia ETR 1-4 si desea una adver-tencia cuando el motor esté sobrecargado según loscálculos. También puede programar el convertidorpara que emita una señal de advertencia medianteuna de las salidas digitales. Seleccione Desconex-ión ETR 1-4 si desea una desconexión cuando elmotor esté sobrecargado según los cálculos.
¡NOTA!:Esta función no protege los motores in-dividualmente si están conectados entre sí en
paralelo.
130130 Frecuencia de arranque
(FREC. ARRANQUE)
Valor:0,0 - 10,0 Hz ✭ 0,0 Hz
Función:La frecuencia de arranque se activa durante eltiempo ajustado en el parámetro 120 Retraso de ar-ranque, después de un comando de arranque. Lafrecuencia de salida ’saltará’ a la siguiente frecuen-cia establecida. Determinados motores, como los derotor cónico, necesitan una tensión/frecuencia de ar-ranque adicional (incremento inicial) en el momentode arrancar para soltar el freno mecánico. Para lo-grar esto, se utilizan los parámetros 130 Frecuenciade arranque y 131 Tensión de arranque.
Descripción de opciones:Ajuste la frecuencia de arranque deseada. Es unacondición necesaria que el parámetro 121 Funciónde arranque, se ajuste en Frec./tensión de arranqueen mismo sentido [3] o Frec./tensión de arranque ensentido de referencia [4] y que en el parámetro 120Retraso de arranque se ajuste un período detiempo y haya una señal de referencia presente.
131131 Tensión de arranque(TENS.ARRANQUE)
Valor:0,0 - 200,0 V ✭ 0,0 V
Función:Tensión de arranque está activado durante el tiempoestablecido en el parámetro 120 Retraso de ar-ranque, después de un comando de arranque. Esteparámetro se puede utilizar, por ejemplo, en aplica-ciones de elevación y descenso (motores de rotorcónico).
Descripción de opciones:Ajuste la tensión que se necesita para soltar el frenomecánico. Se asume que el parámetro 121 Funciónde arranque, se ha ajustado en Frec./tensión dearranque en mismo sentido [3] o Frec./tensión de ar-ranque en sentido de referencia [4], y que en elparámetro 120 Retraso de arranque se ha ajustadoun período de tiempo y hay una señal de referenciapresente.
132132 Tensión de freno de CC
(TENS FRENO CC)
Valor:0 - 100% de la máx. tensión de freno de CC ✭ 0
Función:En este parámetro, se ajusta la tensión de freno deCC que debe activarse en la parada, cuando se al-cance la frecuencia de freno de CC ajustada en elparámetro 127 Frecuencia de entrada del freno deCC, o si se activa elfreno de CC invertido medianteuna entrada digital o la comunicación serie. Enconsecuencia, la tensión de freno de CC estará acti-vada durante el período de tiempo ajustado en elparámetro 126 Tiempo de frenado de CC.
Descripción de opciones:Se debe ajustar como un valor de porcentaje de lamáxima tensión de freno de CC, que depende delmotor.
133133 Tensión de arranque
(TENS ARR)
Valor:0,00 - 100,00 V ✭ Depende de la unidad
Función:Puede obtenerse un par de arranque más alto si seincrementa la tensión de arranque. Los motores pe-queños (< 1,0 kW) requieren, normalmente, unatensión de arranque alta.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 77
Pro
gra
mac
ión
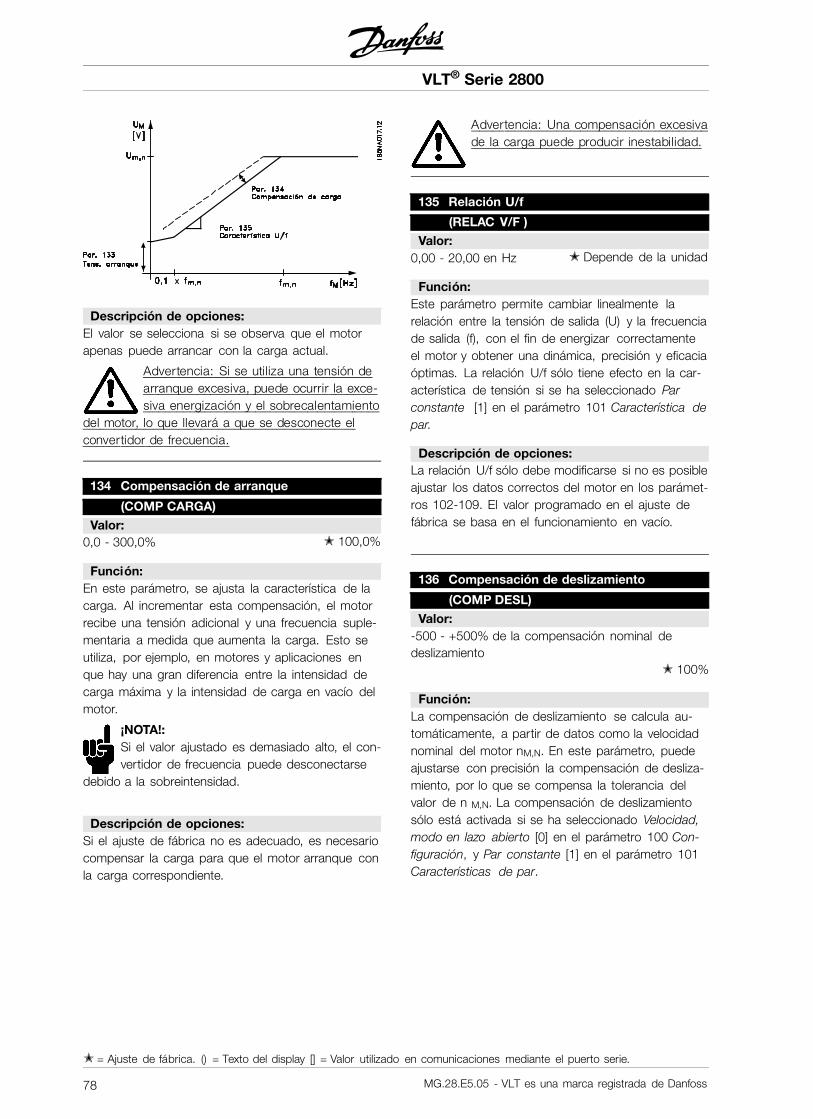
VLT® Serie 2800
Descripción de opciones:El valor se selecciona si se observa que el motorapenas puede arrancar con la carga actual.
Advertencia: Si se utiliza una tensión dearranque excesiva, puede ocurrir la exce-siva energización y el sobrecalentamiento
del motor, lo que llevará a que se desconecte elconvertidor de frecuencia.
134134 Compensación de arranque
(COMP CARGA)
Valor:0,0 - 300,0% ✭ 100,0%
Función:En este parámetro, se ajusta la característica de lacarga. Al incrementar esta compensación, el motorrecibe una tensión adicional y una frecuencia suple-mentaria a medida que aumenta la carga. Esto seutiliza, por ejemplo, en motores y aplicaciones enque hay una gran diferencia entre la intensidad decarga máxima y la intensidad de carga en vacío delmotor.
¡NOTA!:Si el valor ajustado es demasiado alto, el con-vertidor de frecuencia puede desconectarse
debido a la sobreintensidad.
Descripción de opciones:Si el ajuste de fábrica no es adecuado, es necesariocompensar la carga para que el motor arranque conla carga correspondiente.
Advertencia: Una compensación excesivade la carga puede producir inestabilidad.
135135 Relación U/f
(RELAC V/F )
Valor:0,00 - 20,00 en Hz ✭ Depende de la unidad
Función:Este parámetro permite cambiar linealmente larelación entre la tensión de salida (U) y la frecuenciade salida (f), con el fin de energizar correctamenteel motor y obtener una dinámica, precisión y eficaciaóptimas. La relación U/f sólo tiene efecto en la car-acterística de tensión si se ha seleccionado Parconstante [1] en el parámetro 101 Característica depar.
Descripción de opciones:La relación U/f sólo debe modificarse si no es posibleajustar los datos correctos del motor en los parámet-ros 102-109. El valor programado en el ajuste defábrica se basa en el funcionamiento en vacío.
136136 Compensación de deslizamiento
(COMP DESL)
Valor:-500 - +500% de la compensación nominal dedeslizamiento
✭ 100%
Función:La compensación de deslizamiento se calcula au-tomáticamente, a partir de datos como la velocidadnominal del motor nM,N. En este parámetro, puedeajustarse con precisión la compensación de desliza-miento, por lo que se compensa la tolerancia delvalor de n M,N. La compensación de deslizamientosólo está activada si se ha seleccionado Velocidad,modo en lazo abierto [0] en el parámetro 100 Con-figuración, y Par constante [1] en el parámetro 101Características de par.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss78

VLT® Serie 2800
Descripción de opciones:Escriba un valor de %.
137137 Tensión de CC mantenida
(TENS CC MANT)
Valor:0 - 100% de máx. tensión CC mantenida ✭ 0%
Función:Este parámetro se utiliza para mantener el motor enarranque/parada (par mantenido).
Descripción de opciones:Este parámetro sólo se puede utilizar si se ha selec-cionado una CC mantenida en el parámetro 121Función de arranque o el parámetro 122 Función enparada. Se debe ajustar como un valor de por-centaje de la máx. tensión de CC mantenida, quedepende del motor seleccionado.
138138 Valor de desconexión de freno
(DESCONEX. FRENO)
Valor:0,5 - 132,0/1000,0 Hz ✭ 3,0 Hz
Función:Aquí puede seleccionar la frecuencia a la que se lib-era el freno externo, mediante la salida definida enel parámetro 323 Relés 1-3, salida o 341 Salidadigital, terminal 46.
Descripción de opciones:Ajuste la frecuencia requerida.
139139 Frecuencia de conexión de freno
(CONEX. FRENO)
Valor:0,5 - 132,0/1000,0 Hz ✭ 3,0 Hz
Función:Aquí puede seleccionar la frecuencia a la que se ac-tiva el freno externo, y esto se realiza mediante lasalida definida en el parámetro 323 Relés 1-3, salidao 341 Salida digital, terminal 46.
Descripción de opciones:Ajuste la frecuencia requerida.
140140 Corriente, valor mínimo
(CORRIENTE VAL MI)
Valor:0 % de rango - 100 % de rango ✭ 0 %
Función:Aquí es donde el usuario selecciona la intensidadmínima del motor a que se soltará el freno mecánico.El control de intensidad está activado desde unaparada hasta el punto en que se suelta el freno.
Descripción de opciones:Es una precaución de seguridad añadida paraasegurar que la carga no se pierda durante una ac-tividad de elevación/descenso.
142142 Reactancia irregular XL
(REACT. FUGA)
Valor:0,000 - XXX,XXX
✭ Depende del motor seleccionado
Función:Una vez ajustados los parámetros 102-106 relativosa Datos de la placa de características, se ajustanvarios parámetros automáticamente, incluyendo lareactancia irregular XL. El funcionamiento del eje sepuede mejorar ajustando con precisión la reactanciairregular XL
¡NOTA!:El parámetro 142 Reactancia irregular XL
no debe cambiarse, normalmente, si se hanajustado los datos de la placa de características enlos parámetros 102-106.
Descripción de opciones:XL puede establecerse de la siguiente manera:
1. El valor está definido por el proveedor del motor.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 79
Pro
gra
mac
ión

VLT® Serie 2800
2. Utilice los ajustes de fábrica de XL que selec-ciona el convertidor de frecuencia a partir de losdatos de la placa de características del motor.
143143 Control del ventilador interno
(CONTROL VENTIL.)
Valor:✭ Automático (AUTOMA TICO) [0]
Siempre activado (ACTIVADO SIEMPRE) [1]Siempre desactivado (DESACTIV . SIEMPRE) [2]
Función:Este parámetro se puede ajustar para que el venti-lador interno se active y desactive automáticamente.También puede ajustar el ventilador interno para queesté activado o desactivado permanentemente.
Descripción de opciones:Si selecciona Automático, [0] el ventilador interno seactiva o desactiva en función de la temperatura am-biente y de la carga del convertidor de frecuencia.Si selecciona Siempre activado [1] o Siempre desac-tivado [2], el ventilador interno estarápermanentemente activado o desactivado, respecti-vamente.
¡NOTA!:Si selecciona Siempre desactivado [2] juntocon una alta frecuencia de conmutación, ca-
bles de motor largos o una alta potencia de salida,se acortará la duración del convertidor de frecuencia.
144144 Ganancia del freno CA
(GANANC. FRENO CA)
Valor:1,00 - 1,50 ✭ 1,30
Función:Este parámetro se utiliza para ajustar el freno deCA. Con el parám. 144, es posible ajustar el valordel par de regeneración que se puede aplicar almotor sin que la tensión del circuito intermedio so-brepase el nivel de advertencia.
Descripción de opciones:El valor se debe aumentar si se requiere un par defrenado mayor. Si selecciona 1,0 el freno de CA per-manece inactivo.
¡NOTA!:Si se incrementa el valor en el parám. 144, laintensidad del motor aumentará significativa-
mente al aplicar cargas regeneradoras. Por ello, sólose debe cambiar el parámetro si se garantiza quedurante la medición, la intensidad del motor en todaslas situaciones de funcionamiento no sobrepasará elvalor máximo permitido. Tome en cuenta que la in-tensidad no puede leerse en el display.
146146 Vector de reinicialización de tensión
(VECTOR REINIC.)
Valor:*Desactivado ( NO ) [0]Reinicio (RESET) [ 1]
Función:Cuando se reinicia el vector de tensión, se ajusta enel mismo punto de arranque cada vez que empiezaun nuevo proceso.
Descripción de opciones:Seleccione Reinicio (1) si se deben utilizar procesosespeciales cada vez que surjan. Esto permitirá unaprecisión repetida cuando se pare el convertidorpara mejorarlos. Seleccione Desactivado (0) paraoperaciones de elevación/descenso, por ejemplo, oen motores síncronos. Es recomendable que el mo-tor y el convertidor de frecuencia siempre esténsincronizados.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss80

VLT® Serie 2800
■ Referencias y límites
200200 Rango de frecuencia de salida
(RNG FREC. SALIDA/GIRO)
Valor:✭ Sentido hora, 0 - 132 Hz
(132 HZ SENTIDO HORA. ) [0]Ambos sentidos, 0 - 132 Hz(132 HZ AMBOS SENTID.) [1]Sentido antihorario, 0 - 132 Hz(132 HZ ANTIHORA.) [2]Sentido hora, 0 - 1000 Hz(1000 HZ SENTIDO HORA.) [3]Ambos sentidos, 0 -1000 Hz(1000 HZ AMBOS SENTID.) [4]Sentido antihorario, 0 -1000 Hz(1000 HZ ANTIHORA.) [5]
Función:Este parámetro garantiza la protección contra la in-versión no deseada. Además, se puede seleccionarla frecuencia de salida máxima que se aplica, sintener en cuenta los ajustes realizados en otrosparámetros. Este parámetro no tiene función si seha seleccionado Proceso, modo en lazo cerrado enel parámetro 100 Configuración.
Descripción de opciones:Seleccione el sentido de rotación necesario y lafrecuencia de salida máxima. Observe que si selec-ciona Sentido hora [;0]/[3] o Sentido antihorario [2]/[5], la frecuencia de salida se limitará al rango fMIN-fMAX. Si seleccionaAmbos sentidos [1]/[4], la fre-cuencia de salida se limitará al rango ± f MAX (lafrecuencia mínima no tiene importancia).
201201 Frecuencia mínima, fMIN
(FRECUENCIA MIN.)Valor:
0,0 - fMAX ✭ 0,0 Hz
Función:En este parámetro, puede seleccionarse un límite defrecuencia mínima de motor que corresponda a lavelocidad mínima a que puede funcionar el motor.Si se ha seleccionadoAmbos sentidos en elparámetro 200 Rango de frecuencia de salida, lafrecuencia mínima no tendrá importancia.
Descripción de opciones:El valor elegido puede estar entre 0,0 Hz y la fre-cuencia ajustada en el parámetro 202 Frecuenciamáxima, fMAX .
202202 Frecuencia máxima, fMAX
(FRECUENCIA MAX.)
Valor:fMIN - 132/1000 Hz (parám. 200 Rango de frecuen-cia de salida)
✭ 132 Hz
Función:En este parámetro, puede seleccionarse un límitemáximo de frecuencia de salida, que corresponda ala velocidad más alta a que puede funcionar el mo-tor.
¡NOTA!:La frecuencia de salida del convertidor de fre-cuencia nunca puede tener un valor más alto
que 1/10 de la frecuencia de conmutación (parám.411 Frecuencia de conmutación).
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 81
Pro
gra
mac
ión

VLT® Serie 2800
Descripción de opciones:Puede seleccionar un valor entre fMIN y el delparámetro 200 Frecuencia de salida.
■ Manejo de referenciasEl manejo de referencias se describe en el siguientediagrama de bloques. Este diagrama muestra cómoafecta el cambio en un parámetro a la referencia re-sultante.
Los parámetros 203 a 205 Referencia y elparámetro 214 Tipo de referencia definen la maneraen que es posible manejar las referencias. Losparámetros mencionados se pueden activar tanto enlazo cerrado como en lazo abierto.
Las referencias controladas remotas se definencomo:- Referencias externas, como las entradas analógi-
cas 53 y 60, referencias de pulso mediante elterminal 33 y referencias de la comunicación se-rie.
- Referencias internas
La referencia de resultado se puede mostrar en eldisplay del panel de control LCP si se selecciona
Referencia [%] en los parámetros 009-012 Lecturadel display y puede aparecer con una unidad si seelige Referencia [unidad].La suma de las referencias externas se puedemostrar en el display del panel LCP como un % delárea entre la Referencia mínima, Ref MIN y la Refer-encia máxima, RefMAX. Seleccione Referenciaexterna, % [25] en los parámetros 009-012 Lecturadel display si desea que se muestre la lectura.
Es posible obtener simultáneamente las referenciasinternas y externas. En el parámetro 214 Tipo dereferencia se puede elegir la manera de determinarcómo se suman las referencias internas a las exter-nas.
También hay una referencia local independiente enel parámetro 003 Referencia local, en que la diferen-cia de resultado se ajusta con las teclas [+/-].Cuando se ha seleccionado la referencia local, elrango de frecuencia de salida está limitado por elparámetro 201 Frecuencia mínima, fMIN y elparámetro 202 Frecuencia máxima, fMAX.
La unidad de la referencia local depende de la se-lección en el parámetro 100 Configuración.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss82

VLT® Serie 2800
203203 Area de referencia
(AREA REFERENCIA)Valor:
✭ Referencia mín. - Referencia máx. (MÍN - MÁX) [0]-Referencia máx. - Referencia máx. (-MÁX -+MÁX) [1]
Función:En este parámetro, se selecciona si la señal de refer-encia debe ser positiva o si puede ser tanto positivacomo negativa. El límite mínimo puede ser un valornegativo, a menos que en el parámetro 100 Configu-ración se haya seleccionado Velocidad, modo enlazo cerrado. Debe seleccionar Ref. mín. - Ref.máx. [0], si se ha seleccionado Proceso, modo enlazo cerrado [3] en el parámetro 100 Configuración.
Descripción de opciones:Seleccione el rango requerido.
204204 Referenciamínima, RefMIN
(REFERENCIA MIN.)Valor:
Parám. 100 Config. = Lazo abierto [0].-100.000,000 - parám. 205 RefMAX ✭ 0,000 HzParám. 100 Config. = Lazo cerrado [1]/[3].-Parám. 414 Realimentación mín. - parám. 205RefMAX
✭ 0,000 Hz
Función:La referencia mínima es una expresión del valormás pequeño posible de la suma de todas las refer-encias. Si en el parámetro 100 Configuración se haseleccionado Velocidad, modo de lazo cerrado [1] oProceso, modo de lazo cerrado [3], la referenciamínima está limitada por el parámetro 414 Reali-mentación mínima. La referencia mínima se ignorasi está activada la referencia local.
La unidad de la referencia puede definirse mediantela siguiente tabla:
Parám. 100 Configuración UnidadLazo abierto [0] HzVelocidad, modo de lazo cerrado [1] rpmProceso, modo de lazo cerrado [3] Parám.
416
Descripción de opciones:La referencia mínima se ajusta si el motor debe fun-cionar a una velocidad mínima, indpendientementede si la referencia de resultado es 0.
205205 Referencia máxima, RefMAX
(REFERENCIA MAX.)
Valor:Parám. 100 Config. = Lazo abierto [0].Parám. 204 RefMIN - 1000,000 Hz ✭ 50,000 Hz
Parám. 100 Config. = Lazo cerrado [1]/[3].Parám. 204 RefMIN - Parám. 415 Realimentaciónmáx
✭ 50,000 Hz
Función:La referencia máxima indica el valor más alto quepuede tener la suma de todas las referencias. Si seselecciona Lazo cerrado [1]/[3] en el parámetro 100Configuración, la referencia máxima no puede sermayor que el valor en el parámetro 415 Reali-mentación máxima.La referencia máxima se ignora si la referencia localestá activada.
La unidad de la referencia puede definirse mediantela siguiente tabla:
Parám. 100 Configuración UnidadLazo abierto [0] HzVelocidad, modo de lazo cerrado [1] rpmProceso, modo de lazo cerrado [3] Parám.
416
Descripción de opciones:La referencia máxima se ajusta si la velocidad delmotor debe ser el valor máx. que puede ajustarse,independientemente de si la referencia de resultadoes mayor que la referencia máxima.
206206 Tipo de rampa
(TIPO RAMPA)
Valor:✭ Lineal (LINEAL) [ 0]
Curvado en S (S1) [ 1]Forma 2 senoidal (S 2) [2]
Función:Se puede elegir entre un proceso de rampa lineal,curvado en S o senoidal S2.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 83
Pro
gra
mac
ión

VLT® Serie 2800
Descripción de opciones:Seleccione el tipo de rampa según el proceso deaceleración/deceleración requerido.
207207 Tiempo de rampa de aceleración 1
(RAMPA ACELERA 1)
Valor:0,02 - 3600,00 seg ✭ 3,00 seg
Función:El tiempo de rampa de aceleración es el tiempo quese tarda en acelerar de 0 Hz hasta la frecuencianominal del motor fM,N (parámetro 104 Frecuenciadel motor, fM,N). Se asume que la intensidad de sal-ida no alcanza el límite de intensidad (ajustado en elparámetro 221 Límite de intensidad ILIM).
Descripción de opciones:Ajuste el tiempo de aceleración requerido.
208208 Tiempo de rampa de deceleración 1(RAMPA DECELERA 1)
Valor:0,02 - 3600,00 seg ✭ 3,00 seg
Función:El tiempo de rampa de deceleración es el tiempoque se tarda en desacelerar desde la frecuencianominal del motor fM,N (parámetro 104 Frecuencia
del motor, fM,N) hasta 0 Hz, siempre que no surjauna sobretensión en el inversor debido al fun-cionamiento regenerativo del motor.
Descripción de opciones:Ajuste el tiempo de deceleración requerido.
209209 Tiempo de rampa de aceleración 2
(TIEMPO ACELERA 2)
Valor:0,02 - 3600,00 seg ✭ 3,00 seg
Función:Consulte la descripción del parámetro 207 Tiempode rampa de aceleración 1.
Descripción de opciones:Ajuste el tiempo de aceleración requerido. Cambiede la rampa 1 a la rampa 2 activando la Rampa 2mediante una entrada digital.
210210 Tiempo de rampa de deceleración 2(RAMPA DECELERA 2)
Valor:0,02 - 3600,00 seg ✭ 3,00 seg
Función:Consulte la descripción del parámetro 208 Tiempode rampa de deceleración 1.
Descripción de opciones:Ajuste el tiempo de deceleración requerido. Cambiede la rampa 1 a la rampa 2 activando la Rampa 2mediante una entrada digital.
211211 Tiempo de rampa de velocidad fija
(RAMPA JOG)
Valor:0,02 - 3600,00 seg ✭ 3,00 seg
Función:El tiempo de rampa de velocidad fija es el tiempo deaceleración o deceleración desde 0 Hz hasta la fre-cuencia nominal del motor fM,N (parámetro 104Frecuencia del motor, fM,N). Se asume que la inten-sidad de salida no alcanza el límite de intensidad(definido en el parámetro 221 Límite de intensidadILIM).
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss84

VLT® Serie 2800
El tiempo de rampa de velocidad fija empieza si seda una señal de velocidad fija mediante el panel decontrol LCP, una de las entradas digitales o elpuerto de comunicación serie.
Descripción de opciones:Ajuste el tiempo de rampa requerido.
212212 Tiempo rampa deceler. paro rápido
(RAMP PARO RAPIDO)Valor:
0,02 - 3600,00 seg ✭ 3,00 seg
Función:El tiempo de rampa de deceleración de parada ráp-ida es el tiempo que se tarda en desacelerar desdela frecuencia nominal del motor hasta 0 Hz, siempreque no haya una sobretensión en el inversor por elfuncionamiento regenerativo del motor, y que laintensidad generada no sobrepase el límite de inten-sidad del parámetro 221 Límite de intensidad ILIM.La parada rápida se activa mediante una de las en-tradas digitales o la comunicación serie.
Descripción de opciones:Ajuste el tiempo de rampa de deceleración re-querido.
213213 Frecuencia de velocidad fija
(FRECUENCIA JOG)Valor:
0,0 - Parám. 202 Frecuencia máxima, fMAX
✭ 10,0 Hz
Función:La frecuencia de velocidad fija fJOG es una frecuen-cia de salida fija que suministra el convertidor defrecuencia al motor cuando está activada la funciónde velocidad fija. La velocidad fija se puede activar
mediante las entradas digitales, la comunicación se-rie o el panel de control LCP, siempre que estéactivada en el parámetro 015 Veloc. fija local.
Descripción de opciones:Ajuste la frecuencia deseada.
■ Tipo de referenciaEl ejemplo muestra cómo se calcula la referencia deresultado cuando se utilizan Referencias internasjunto con Suma y Relativa en el parámetro 214Tipo de referencia. La fórmula para calcular la refer-encia de resultado puede consultarse en la seccióntitulada Todo acerca del VLT 2800. Consulte tam-bién el dibujo en Manejo de referencias.
Se han preajustado los siguientes parámetros:Parám. 204 Referencia mínima 10 HzParám. 205 Referencia máxima 50 HzParám. 215 Referencia interna 15 %Parám. 308 Term. 53, entradaanalógica
Referencia
Parám. 309 Term.53, escaladomín.
0 V
Parám. 310 Term. 53, escaladomáx.
10 V
Cuando el parámetro 214 Tipo de referencia seajusta en Suma [0] una de las Referencias internaspreajustadas (par. 215-218) se suma a las referen-cias externas como un porcentaje del rango dereferencia. Si se aplica al terminal 53 una tensiónde entrada analógica de 4 V, la referencia de resul-tado será la siguiente:
Parám. 214 Tipo de referencia = Suma [0]:Parám. 204 Referencia mínima 10 HzContribución de referencia a 4 V 16 HzParám. 215 Referencia interna 6 HzReferencia de resultado 32 Hz
Cuando el parámetro 214 Tipo de referencia seajusta en Relativa [1] las Referencias internasdefinidas (par. 215-218) se suman como un por-centaje del total de referencias externas actuales. Siel terminal 53 se aplica a una tensión de entradaanalógica de 4 V, la referencia de resultado será lasiguiente:
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 85
Pro
gra
mac
ión

VLT® Serie 2800
Parám. 214 Tipo de referencia = Relativa [1]:Parám. 204 Referencia mínima 10 HzEfecto de referencia a 4 V 16 HzParám. 215 Referencia interna 2,4 HzReferencia de resultado 28,4 Hz
El gráfico muestra la referencia de resultado enrelación con la referencia externa, que varía de 0 a10 voltios. Parámetro 214 Tipo de referencia seprograma en Suma [0] y Relativa [1] respectiva-mente. También se muestra un gráfico en el que elparámetro 215 Referencia interna 1 se ha progra-mado en el 0%.
214214 Tipo de referencia
(TIPO REF INTERNA)
Valor:✭ Suma (SUMA) [0]
Relativa (RELA TIVA) [1]Externa sí/no (EXTERNA SI/NO) [2]
Función:Es posible definir cómo se suman las referencias in-ternas a las demás referencias. Para este propósito,utilice Suma o Relativa.. Con la función In addition,using the Externa sí/no es posible elegir si se debecambiar entre las referencias externas e internas.La referencias externas son la suma de la referen-cias analógicas, referencias de pulso y cualquierreferencia de la comunicación serie.
Descripción de opciones:Si se seleccionaSuma [0], una de las referencias in-ternas (parámetros 215-218 Referencia interna) sedefine como un porcentaje del rango de referencias(Ref MIN - RefMAX), sumado a las otras referenciasexternas.
Si se selecciona Relativa [1], una de las referenciasinternas (parámetros 215-218 Referencia interna) sedefine como un porcentaje de la suma de las refer-encias externas presentes.Si se selecciona Externa sí/no [2], es posiblecambiar mediante una entrada digital entre las refer-encias externas e internas. Las referencias internasson un valor de porcentaje del rango de referencias.
¡NOTA!:Si se selecciona Suma o Relativa, una de lasreferencias internas siempre estará activada.
Si las referencias internas no deben tener ningunainfluencia, es necesario ajustarlas en 0% (ajuste defábrica).
215215 Referencia interna 1 (REF. INTERNA 1)
216216 Referencia interna 2 (REF. INTERNA 2)
217217 Referencia interna 3 (REF. INTERNA 3)218218 Referencia interna 4 (REF. INTERNA 4)Valor:
-100,00% - +100,00% ✭ 0,00%del rango de referencias/referencia externa
Función:Es posible programar hasta cuatro referencias inter-nas en los parámetros 215-218 Referencia interna.La referencia interna se indica como un porcentajedel rango de referencias (RefMIN - RefMAX) o comoun porcentaje de las otras referencias externas, de-pendiendo de la selección realizada en el parámetro214 Tipo de referencia. La selección entre las refer-encias internas puede realizarse mediante lasentradas digitales o la comunicación serie.
Ref. interna,msb
Ref. interna,lsb
0 0 Ref. interna 10 1 Ref. interna 21 0 Ref. interna 31 1 Ref. interna 4
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss86

VLT® Serie 2800
Descripción de opciones:Ajustelas referencias internas que deben utilizarsecomo opciones.
219219 Valor de enganche/arriba-abajo
(VALOR ENGANCHE)Valor:
0,00 - 100% de una referencia dada ✭ 0,00%
Función:En este parámetro, se puede seleccionar el valorporcentual que se sumará o restará a las referenciascontroladas remotamente.La referencia controlada remotamente es la sumade las referencias internas, referencias analógicas,referencias de pulso, y todas las referencias de co-municación serie.
Descripción de opciones:Si Enganche arriba se activa mediante una entradadigital, el valor porcentual del parámetro 219 Valorde enganche/arriba-abajo se sumará a la referenciacontrolada remotamente.Si Enganche abajo se activa mediante una entradadigital, el valor porcentual del parámetro 219 Valorde enganche/arriba-abajo se restará de la referenciacontrolada remotamente.
221221 Límite de intensidad, ILIM
(LIMITE INTENS)
Valor:0 - XXX,X % de par. 105 ✭ 160 %
Función:Aquí se ajusta la máxima intensidad de salida ILIM.El valor ajustado en fábrica corresponde a la máx-ima intensidad de salida IMAX. Si se va a utilizar estelímite como protección del motor, utilice el valor dela intensidad nominal del motor. Si el límite de inten-sidad se ajusta por encima del 100% (intensidad desalida nominal del convertidor), IINV.), éste sólo po-drá manejar una carga intermitentemente, es decir,en períodos de tiempo cortos. Después de que lacarga sea más alta que IINV , debe garantizarse quedurante un período la carga sea más baja que IINV..Tenga en cuenta que si el límite de intensidad seajusta en un valor inferior a IINV., el par de acel-eración se reducirá en la misma proporción.
Descripción de opciones:Ajuste la intensidad de salida máxima ILIM requerida.
223223 Advertencia: Intensidad baja, ILOW
(AVISO BAJA INTEN)
Valor:0,0 - parám. 224 Advertencia: Alta intensidad, IHIGH
✭ 0,0 A
Función:Si la intensidad de salida cae por debajo del límitepreajustado ILOW, se emite una advertencia.Los parámetros 223-228 Funciones de advertenciaestán desactivados durante la aceleración despuésde una orden de arranque, o después de una ordende parada y durante la parada. Las funciones de ad-vertencia se activan cuando la frecuencia de salidaha alcanzado la referencia de resultado. Las salidasde señal se pueden programar para que se dé unaseñal de advertencia mediante el terminal 46 y lasalida de relé.
Descripción de opciones:El límite inferior de la señal de intensidad de salidaILAV debe programarse en el rango de fun-cionamiento normal del convertidor de frecuencia.
224224 Advertencia: Intensidad alta, IHIGH
(AVISO ALTA INTEN)Valor:
Parám. 223 Advert.: Intens. baja, ILOW - IMAX ✭ IMAX
Función:Si la intensidad de salida sobrepasa el límite ajus-tado IHIGH se emite una advertencia.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 87
Pro
gra
mac
ión

VLT® Serie 2800
Los parámetros 223-228 Funciones de advertenciano funcionan durante la aceleración después de uncomando de arranque, después de un comando deparada, o durante la parada. Las funciones de ad-vertencia se activan cuando la frecuencia de salidaha alcanzado la referencia de resultado. Las salidasde señal pueden programarse para emitir una señalde advertencia mediante el terminal 46 y mediantela salida de relé.
Descripción de opciones:El límite de señal superior de la intensidad de salidaIHIGH se debe programar dentro del rango de fun-cionamiento normal del convertidor de frecuencia.Consulte el dibujo en el parámetro 223 Advertencia:Intensidad baja, ILOW.
225225 Advertencia: Baja frecuencia, fLOW
(AVISO BAJA FREC.)
Valor:0,0 - parám. 226 Adver.: Alta frecuencia, fHIGH✭ 0,0 Hz
Función:Si la frecuencia de salida cae por debajo del límiteajustado fLOW se emite una alarma.Los parámetros 223-228 Funciones de advertenciaestán desactivados durante la aceleración despuésde un comando de arranque, y después de un co-mando de parada o durante la parada. Lasfunciones de advertencia se activan cuando la fre-cuencia de salida ha alcanzado la referencia deresultado. Las salidas de señal pueden programarsepara emitir una señal de advertencia mediante elterminal 46 y mediante la salida de relé.
Descripción de opciones:El límite de señal inferior de la frecuencia de salidafLOW debe programarse en el rango de fun-cionamiento normal del convertidor de frecuencia.Consulte el dibujo en el parámetro 223 Advertencia:Intensidad baja, ILOW.
226226 Advertencia: Alta frecuencia, fHIGH
(AVISO ALTA FREC.)
Valor:Parám. 200 Rango de frecuencia = 0-132 Hz [0]/[1].parám. 225 fLOW - 132 Hz ✭ 132,0 Hz
Parám. 200 Rango de frecuencia = 0-1000 Hz [2]/[3].parám. 225 fLOW - 1000 Hz ✭ 132,0 Hz
Función:Si la frecuencia de salida sobrepasa el límite ajus-tado fHIGH se emite una alarma.Los parámetros 223-228 Funciones de advertenciano funcionan durante la aceleración después de uncomando de arranque, después de un comando deparada, o durante la parada. Las funciones de ad-vertencia se activan cuando la frecuencia de salidaha alcanzado la referencia de resultado. Las salidasde señal pueden programarse para emitir una señalde advertencia mediante el terminal 46 y mediantela salida de relé.
Descripción de opciones:El límite de señal superior de la frecuencia de salidafHIGH se debe programar dentro del rango de fun-cionamiento normal del convertidor de frecuencia.Consulte el dibujo en el parámetro 223 Advertencia:Intensidad baja, ILOW.
227227 Advertencia: Baja realimentación, RLOW
(AVISO BAJA REALI)Valor:
-100.000,000 - parám. 228 Adver.:RHIGH
✭ -4.000,000
Función:Si la señal de realimentación cae por debajo dellímite preajustado RLOW , se emite una advertencia.Los parámetros 223-228 Funciones de advertenciaestán desactivados durante la aceleración despuésde una orden de arranque, y de una orden deparada o durante la parada. Las funciones de adver-tencia se activan cuando la frecuencia de salida haalcanzado la referencia de resultado. Las señalesde salida pueden programarse para emitir una señalde advertencia mediante el terminal 46 y la salidade relé. Las unidades para la realimentación en lazocerrado se programan en el parámetro 416 Unidadde proceso.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss88

VLT® Serie 2800
Descripción de opciones:Ajuste el valor requerido en el rango de reali-mentación (parámetro 414 Realimentación mín.,RMIN y 415 Realimentación máx., RMAX).
228228 Advertencia: Alta realimentación, RHIGH
(AVISO ALTA REALI)
Valor:Parám. 227 Adver: RLOW - 100.000,000 ✭ 4.000,000
Función:Si la señal de realimentación se incrementa porencima del límite preajustado RHIGH , se emite unaadvertencia.Los parámetros 223-228 Funciones de advertenciaestán desactivados durante la aceleración despuésde una orden de arranque, y de una orden deparada o durante la parada. Las funciones de adver-tencia se activan cuando la frecuencia de salida haalcanzado la referencia de resultado. Las salidas deseñal se pueden programar para dar una señal deadvertencia mediante el terminal 46 y la salida derelé. Las unidades para la realimentación en lazocerrado se programan en el parámetro 416 Unidadde proceso.
Descripción de opciones:Ajuste el valor requerido en el rango de reali-mentación (parámetro 414 Realimentación mín.,RMIN y 415 Realimentación máx., RMAX).
229229 Bypass de frecuencia, ancho de banda
(AVISO ALTA REALI)Valor:
0 (NO) - 100 Hz ✭ 0 Hz
Función:Algunos sistemas requieren que se eviten algunasfrecuencias de salida debido a los problemas deresonancia de los mismos. En los parámetros 230-231 Bypass de frecuencia es posible programarestas frecuencias de salida. En este parámetro, sepuede definir un ancho de banda para cada una delas frecuencias.
Descripción de opciones:La frecuencia ajustada en este parámetro se basaen los parámetros 230 Bypass de frecuencia 1 y231 Bypass de frecuencia 2.
230230 Bypass de frecuencia 1 (FREC. BYPASS 1)231231 Bypass de frecuencia 2 (FREC. BYPASS 2)Valor:
0 - 1.000 Hz ✭ 0,0 Hz
Función:Algunos sistemas requieren que se eviten algunasfrecuencias de salida debido a la resonanciamecánica en los mismos.
Descripción de opciones:Introduzca las frecuencias que es necesario evitar.Consulte además el parámetro 229 Bypass de fre-cuencia, ancho de banda.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 89
Pro
gra
mac
ión

VLT® Serie 2800
■ Señales de entrada y de salida
Entradas digitales Nº terminal 181 191 27 29 33
Parám. 302 303 304 305 307Valor:Sin función (NO) [0] [0] [0] [0] ✭ [0]
Reset (RESET) [1] [1] [1] [1] [1]Parada de inercia inversa (PARADA INERCIA INV.) [2] [2] [2] [2] [2]Reset y parada de inercia inversa (RESET E INERCIA INV.) [3] [3] ✭ [3] [3] [3]Parada rápida inversa (PARADA RAPIDA INV.) [4] [4] [4] [4] [4]Freno de CC (FRENO CC) [5] [5] [5] [5] [5]Parada inversa (PARADA INV.) [6] [6] [6] [6] [6]Arranque (ARRANQUE) ✭ [7] [7] [7] [7] [7]Arranque de pulsos (ARRANQUE DE PUL-
SOS)[8] [8] [8] [8] [8]
Cambio de sentido (CAMBIO SENTIDO) [9] ✭ [9] [9] [9] [9]Arranque y cambio de sentido (ARRANQ.+CAMB.SENT .) [10] [10] [10] [10] [10]Arranque adelante (ARRANQUE ADE-
LAN.,SI)[11] [11] [11] [11] [11]
Arranque e inversión (ARRANQUE INVERSO,SI)
[12] [12] [12] [12] [12]
Velocidad fija (VELOCIDAD FIJA) [13] [13] [13] ✭ [13] [13]Mantener referencia (MANTENER REFEREN-
CIA)[14] [14] [14] [14] [14]
Mantener frecuen. de salida (MANTENER SALIDA) [15] [15] [15] [15] [15]Aceleración (AUMENT AR VELOCI-
DAD)[16] [16] [16] [16] [16]
Deceleración (DISMINUIR VELOCIDAD) [17] [17] [17] [17] [17]Enganche arriba (ENGANCHE ARRIBA) [19] [19] [19] [19] [19]Enganche abajo (ENGANCHE ABAJO) [20] [20] [20] [20] [20]Rampa 2 (RAMPA 2) [21] [21] [21] [21] [21]Referencia interna, LSB (REF . INTERNA, LSB) [22] [22] [22] [22] [22]Referencia interna, MSB (REF . INTERNA, MSB) [23] [23] [23] [23] [23]Referencia interna, sí (REF . INTERNA, SI) [24] [24] [24] [24] [24]Termistor (TERMISTOR) [25] [25] [25] [25]Parada precisa (PARADA PRECISA) [26] [26]Arranque/parada precisos ((ARRANQUE/P ARADA
PREC.)[27] [27]
Referencia de pulsos (REF . PULSOS) [28]Realimentación de pulsos (REALIM. PULSOS) [29]Entrada de pulsos (ENTR. PULSOS) [30]Selección de Ajuste, lsb (SELECCION AJUSTE
LSB)[31] [31] [31] [31] [31]
Selección de Ajuste, msb (SELECCION AJUSTEMSB)
[32] [32] [32] [32] [32]
Reset y arranque (RESET Y ARRANQUE) [33] [33] [33] [33] [33]
1. Los terminales 18 y 19 se controlan medianteun interruptor, lo que significa que la precisiónrepetitiva del tiempo de respuesta es constante. Sepuede utilizar para arranque/parada, conmutación
de ajuste y especialmente para cambiar referenciasinternas digitales, es decir, para obtener un puntode parada estable cuando se utiliza una velocidadlenta. De esta forma, se optimiza la posición del
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss90

VLT® Serie 2800
sensor debido a un tiempo de ciclo menor y, por lotanto, a una velocidad de pulsos más alta.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 91
Pro
gra
mac
ión

VLT® Serie 2800
Función:En los parámetros 302-307 Entradas digitales esposible elegir entre las distintas funciones activadasrelativas a las entradas digitales (terminales 18-33).
Descripción de opciones:Sin función se selecciona si el convertidor de fre-cuencia no debe reaccionar a señales transmitidasal terminal.
Reset reinicia el convertidor de frecuencia despuésde una alarma, pero no es posible reiniciar algunasalarmas (desconexión bloqueada) sin desconectar yvolver a conectar el suministro de red eléctrica. Con-sulte la tabla en Lista de advertencias y alarmas.Reset se activa en la parte delantera de la señal.
Parada de inercia inversa se utiliza para que elconvertidor de frecuencia "suelte" el motor inmedi-atamente (los transistores de salida se "apagan"),por lo que el motor gira libremente para detenerse.El ’0’ lógico lleva a la parada por inercia.
Reset y parada de inercia inversa se utilizan paraactivar la parada por inercia junto con un reset delmotor. El ’0’ lógico lleva a la parada por inercia y re-set. Reset se activa en la parte posterior de la señal.
Parada rápida inversa se utiliza para activar la de-celeración de parada rápida ajustada en elparámetro 212 Tiempo rampa decel. paro rápido. El’0’ lógico lleva a una parada rápida.
Freno de CC inverso se utiliza para parar el motorenergizándolo con tensión de CC durante un espa-cio de tiempo, consulte los parámetros 126, 127 y132 Freno de CC. Tenga en cuenta que esta fun-ción sólo está activada si el valor en los parámetros126 Tiempo de frenado de CC y 132 Tensión defreno de CC son distintos de 0. El ’0’ lógico lleva alfrenado de CC.
Parada inversa, un ’0’ lógico significa que la veloci-dad del motor se reduce hasta pararlo mediante larampa seleccionada.
Ninguno de los comandos de paradaanteriores se debe utilizar como interrup-tores para reparaciones. Tenga presente
que el convertidor tiene otras entradas de tensiónademás de L1, L2 y L3 cuando se utilizan losterminales CC de bus. Compruebe que se han de-sconectado todas las entradas de tensión y que hatranscurrido el tiempo necesario (4 minutos) antesde comenzar las actividades de reparación.
Arranque se selecciona si se requiere un comandode arranque/parada. ’1’ lógico = arranque, ’0’ lógico= parada.
Arranque de pulsos, si se aplica un pulso durante 14ms como mínimo, el convertidor de frecuencia ar-ranca el motor, siempre que no se haya dado uncomando de parada. El motor se puede parar mo-mentáneamente si se activa Parada inversa.
Cambio de sentido se utiliza para cambiar el sentidode rotación del eje del motor. ’0’ lógico no produceel cambio de sentido. El ’1’ lógico llevará al cambiode sentido. La señal de inversión sólo cambia elsentido de giro, sin activar el arranque. Esta funciónno está activada en Proceso, modo en lazo cerrado.Consulte además el parámetro 200 Rango/direcciónde frecuencia de salida.
Arranque e inversión se utiliza para el arranque/parada y la inversión con la misma señal. No sepermite al mismo tiempo una orden de arranque ac-tivada. Esta función no está activada en Proceso,modo en lazo cerrado. Consulte además elparámetro 200 Rango/dirección de frecuencia desalida.
Arranque adelante se utiliza si se quiere que el ejedel motor sólo gire de izquierda a derecha en el ar-ranque. No se debe utilizar con Proceso, modo enlazo cerrado.
Arranque inverso se utiliza para que el eje del motorsólo gire de derecha a izquierda en el arranque. Nose debe utilizar con Proceso, modo en lazo cerrado.Consulte además el parámetro 200 Rango/direcciónde frecuencia de salida.
Velocidad fija se utiliza para anular la frecuencia desalida y hacer uso de la frecuencia de velocidad fijadel parámetro 213 Frecuencia de velocidad fija. Ve-locidad fija está activada sin tener en cuenta si seha dado o no una orden de arranque, aunque estádesactivada si se han activado Parada de inercia,Parada rápida o Frenado de CC.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss92

VLT® Serie 2800
Mantener referencia permite mantener la referenciaactual. Ahora, la referencia sólo se puede cambiarmediante Aumentar velocidad y Disminuir velocidad.Si Mantener referencia está activada, se guardarádespués de una orden de parada y si hay un fallo dealimentación eléctrica.
Mantener salida permite mantener la frecuencia desalida actual (en Hz). Ahora, la frecuencia de salidasólo se puede cambiar mediante Aumentar veloci-dad y Disminuir velocidad.
¡NOTA!:Si Mantener salida está activada, elconvertidor sólo se puede parar si se ha se-
leccionado Parada de inercia, Parada rápida oFrenado de CC mediante una entrada digital.
Aumentar velocidad y Disminuir velocidad se selec-cionan si se requiere el control digital de laaceleración o deceleración. Esta función sólo estáactivada si Mantener referencia o Mantener frecuen-cia de salida se han seleccionado.Si Aumentar velocidad está activada, aumentarán lareferencia o la frecuencia de salida, y si lo está Dis-minuir velocidad disminuirán la referencia o lafrecuencia de salida. La frecuencia de salida secambia mediante los tiempos de rampa ajustados enlos parámetros 209-210 Rampa 2.Un pulso (’1’ lógico como valor alto mínimo para 14ms y un tiempo de interrupción mínimo de 14 ms)llevará a un cambio de velocidad del 0,1 % (referen-cia) o 0,1 Hz (frecuencia de salida). Ejemplo:
Term.29
Term.33
Mant. ref./Mant. salida
Función
0 0 1 Sin cambio de ve-locidad
0 1 1 Aceleración1 0 1 Deceleración1 1 1 Deceleración
Mantener referencia se puede cambiar aunque sehaya parado el convertidor de frecuencia. La refer-encia se guarda en caso de desconexión de laalimentación eléctrica
Enganche arriba/abajo se selecciona si el valor dereferencia se va a incrementar o reducir en un valorde porcentaje programable ajustado en el parámetro219 Valor de enganche/arriba-abajo.
Engancheabajo
En-ganchearriba
Función
0 0 Veloc. sin cambios0 1 Valor increm. en %1 0 Reducir valor en %1 1 Reducir valor en %
Rampa 2 se selecciona si se requiere el cambio en-tre la rampa 1 (parámetros 207-208) y la rampa 2(parámetros 209-210). El ’0’ lógico lleva a la rampa1 y el ’1’ lógico lleva a la rampa 2.
Referencia interna, lsb y Referencia interna, msbhace posible seleccionar una de las cuatro referen-cias internas, consulte la siguiente tabla:
Ref. internamsb
Ref. internalsb
Función
0 0 Ref. interna 10 1 Ref. interna 21 0 Ref. interna 31 1 Ref. interna 4
Referencia interna, sí se utiliza para cambiar entrela referencia de control remoto y la referencia in-terna. Se asume que está seleccionada Externa/sí/no [2] en el parámetro 214 Tipo de referencia. ’0’lógico = están activadas las referencias controladasremotamente, ’1’ lógico = hay activada una de lascuatro referencias internas, que pueden consultarseen la tabla anterior.
Se debe seleccionar Termistor si hay un termistor in-tegrado en el motor que puede parar el convertidorde frecuencia si el motor se sobrecalienta. El valorde desconexión es 3 k?.
Sin embargo, si un motor tiene un interruptor tér-mico Klixon, también puede conectarse a la entrada.Si el motor funciona en paralelo, los termistores/in-
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 93
Pro
gra
mac
ión

VLT® Serie 2800
terruptores térmicos pueden conectarse en serie(resistencia total inferior a 3 k?).El parámetro 128 Protección térmica del motor sedebe programar en Advertencia del termistor [1] oDesconexión del termistor [2] y el termistor debeconectarse entre una entrada digital y el terminal 50(alimentación de +10 V).
Parada precisa inversa se selecciona para obteneruna gran precisión cuando se repite un comando deparada. El "0" lógico significa que el motor sedesacelera hasta la parada mediante la rampa se-leccionada.
Arranque/parada precisos se selecciona paraobtener una alta precisión cuando se repite un co-mando de arranque y parada.
Referencia de pulsos se selecciona si la señal dereferencia aplicada es un tren de pulsos (frecuen-cia). El valor de 0 Hz corresponde al parámetro204Referencia mínima, RefMIN. La frecuencia ajus-tada en el parámetro 327 Referencia/realimentaciónde pulso corresponde al parámetro 205 Referenciamáxima RefMAX.
Realimentación de pulsos se selecciona si la señalde realimentación utilizada es un tren de pulsos(frecuencia). En el parámetro 327 Referencia/reali-mentación de pulso, se ajusta la frecuencia máx. derealimentación de pulso.
Entrada de pulsos se selecciona si un número deter-minado de pulsos debe llevar a la Parada precisa,consulte el parámetro 343 Parada precisa y elparámetro 344 Valor de contador.
Selección de Ajuste, lsb y Selección de Ajuste, msbpermiten elegir uno de los cuatro ajustes posibles.Sin embargo, es necesario que el parámetro 004esté establecido en Ajuste múltiple.
Reset y arranque se puede utilizar como una fun-ción de arranque. Si hay 24 V conectados a laentrada digital, esto causará que el convertidor de
frecuencia se reinicie, y el motor acelerará hasta lareferencia interna.
308308 Terminal 53, tensión de entradaanalóg.
(ENTR. AI 53 [V])Valor:Sin funcionam. (NO) [0]
✭ Referencia (REFERENCIA) [1]Realimentación (REALIMENT ACION) [2]
Función:En este parámetro, se puede seleccionar la funciónrequerida que se conectará al terminal 53. El escal-ado de la señal de entrada se realiza en elparámetro 309 Terminal 53, escalado mín. y elparámetro 310 Terminal 53, escalado máx.
Descripción de opciones:Sin funcionam. [0]. Se selecciona si el convertidorno debe reaccionar a señales conectadas al termi-nal.Referencia [1]. Si se selecciona esta función, la ref-erencia se puede cambiar mediante una señal dereferencia analógica. Si hay señales de referenciaconectadas a más de una entrada, dichas señalesdeben sumarse.Si hay una señal de realimentación de tensiónconectada, seleccione Realimen. [2] en el terminal53.
309309 Terminal 53, escalado mín.
(ESCALA MIN AI 53)
Valor:0,0 - 10,0 Voltios ✭ 0,0 Voltios
Función:Este parámetro se utiliza para ajustar el valor deseñal que debe corresponder a la referencia mínimao la realimentación mínima, parámetro 204 Referen-cia mínima, RefMIN / 414 Realimentación mínima,FBMIN.
Descripción de opciones:Ajuste el valor de tensión requerido. Por motivos deprecisión, debe realizarse una compensación parapérdidas de tensión en cables de señal largos. Si vaa utilizarse la función de intervalo de tiempo(parámetros 317 Intervalo de tiempo y 318 Función
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss94

VLT® Serie 2800
después de intervalo de tiempo ), el valor ajustadodebe ser mayor de 1 Voltio.
310310 Terminal 53, escalado máx.
(ESCALA MAX AI 53)Valor:
0 - 10,0 Voltios ✭ 10,0 Voltios
Función:Este parámetro se utiliza para ajustar el valor deseñal que corresponde al valor de la referencia máx-ima o la realimentación máxima, parámetro 205Referencia máxima, RefMAX / 414 Realimentaciónmáxima, FBMAX.
Descripción de opciones:Ajuste el valor de tensión requerido. Por motivos deprecisión, es necesario realizar la compensación delas pérdidas de tensión en cables de señal largos.
314314 Terminal 60, intens. de entrada analóg.
(ENTR. AI 60[MA] )Valor:
✭ Sin funcionamiento (NO) [0]Referencia (REFERENCIA) [1]Realimentación (REALIMENT ACION) [2]
Función:Este parámetro permite elegir entre las distintas fun-ciones disponibles para la entrada, terminal 60. Elescalado de la señal de entrada se realiza en elparámetro 315 Terminal 60, escalado mín. y elparámetro 316 Terminal 60, escalado máx.
Descripción de opciones:Sin funcionamiento [0]. Se selecciona si el conver-tidor no debe reaccionar a señales conectadas alterminal.Referencia [1]. Si se selecciona esta función, la ref-erencia puede cambiarse mediante una señal dereferencia analógica. Si las señales de referenciaestán conectadas a más de una entrada, es nece-sario sumarlas.
Si se conecta una señal de realimentación de inten-sidad, seleccione Realiment. [2] en el terminal 60.
315315 Terminal 60, escalado mín.
(ESCALA MIN AI 60)Valor:
0,0 - 20,0 mA ✭ 0,0 mA
Función:En este parámetro se ajusta el valor de señal quecorresponde a la referencia mínima o la reali-mentación mínima, parámetros 204 Referenciamínima, RefMIN / 414 Realimentación mínima, FBMIN.
Descripción de opciones:Ajuste el valor de intensidad requerido. Si se va autilizar la función de intervalo de tiempo (parámetros317 Intervalo de tiempo y 318 Función después deintervalo de tiempo) el valor ajustado debe sermayor de 2 mA.
316316 Terminal 60, escalado máx.
(ESCALA MAX AI 60)Valor:
0,0 - 20,0 mA ✭ 20,0 mA
Función:Este parámetro se utiliza para ajustar el valor deseñal que debe corresponder al valor de referenciamáxima, parámetro 205 Referencia máxima, RefMAX.
Descripción de opciones:Ajuste el valor de intensidad requerido.
317317 Intervalo de tiempo
(TIEM.CERO ACTIVO)Valor:
1 - 99 seg ✭ 10 seg
Función:Si el valor de la señal de referencia o realimentaciónconectada a uno de los terminales de entrada 53 o60 cae por debajo del 50% del escalado mínimo du-rante un período de tiempo superior al seleccionado,se activará la función elegida en el parámetro 318Función después de intervalo de tiempo. Esta fun-ción sólo está activada si en el parámetro 309Terminal 53, escalado mín. se ha seleccionado unvalor mayor de 1 voltio, o si en el parámetro 315 Ter-minal 60, escalado mín. se ha elegido un valormayor de 2 mA.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 95
Pro
gra
mac
ión

VLT® Serie 2800
Descripción de opciones:Ajuste el tiempo requerido.
318318 Función después de intervalo de tiempo
(FUNC. CERO ACTIV)Valor:
✭ Sin función (NO) [0]Mantener frec. de salida (MANTENER SALIDA) [1]Parada (PARO) [ 2]Velocidad fija (VELOCIDAD FIJA) [3]Velocidad máx. (MAXIMA VELOCIDAD) [4]Parada y desconexión (PARO Y DESCONEXION)[5]
Función:Este parámetro permite elegir la función que se acti-vará cuando ha transcurrido el intervalo de tiempo(parámetro 317 Intervalo de tiempo). Si la funciónde intervalo de tiempo se activa a la vez que la fun-ción de intervalo de tiempo de bus (parámetro 513Interv. tiempo bus), la función de intervalo de tiempodel parámetro 318 se activará.
Descripción de opciones:La frecuencia de salida del convertidor puede:- mantenerse en la frecuencia actual[1]- irse a parada[2]- irse a la frecuencia de velocidad fija[3]- irse a la frecuencia de salida máxima [4]- pararse y activar una desconexión [5]
319319 Salida analógica, terminal 42
(SALIDA ANALOG.42)Valor:Sin función (NO) [0]Ref. externa mín.-máx. 0-20 mA(REF MIN-MAX= 0-20 MA) [1]Ref. externa mín.-máx. 4-20 mA(REF MIN-MAX= 4-20 MA) [2]Realiment. mín.-máx. 0-20 mA(FB MIN-MAX = 0-20 MA) [3]Realiment. mín.-máx. 4-20 mA(FB MIN-MAX = 4-20 MA) [4]Frecuencia de salida 0-máx. 0-20 mA(0-FMAX = 0-20 MA) [5]Frecuencia de salida 0-máx. 4-20 mA(0-FMAX = 4-20 MA) [6]
✭ Intensidad de salida 0-IINV 0-20 mA(0-IMAX = 0-20 MA) [7]Intensidad de salida 0-IINV 4-20 mA(0-IMAX = 4-20 MA) [8]Potencia de salida 0-PM,N 0-20 mA(0-PNOM = 0-20 MA) [9]Potencia de salida 0-PM,N 4-20 mA
(0-PNOM = 4-20 MA) [10]Temperatura del inversor 20-100 �C 0-20 mA(TEMP 20-100 C=0-20 MA) [11]Temperatura del inversor 20-100 �C 4-20 mA(TEMP 20-100 C=4-20 MA) [12]
Función:La salida analógica se puede utilizar para enunciarun valor de proceso. Es posible elegir dos tipos deseñales de salida, 0 - 20 mA y 4 - 20 mA.Si esta salida se utiliza para la tensión (0 - 10 V), esnecesario instalar una resistencia de caída de 500 al terminal común (terminal 55). Si la salida se uti-liza como salida de intensidad, la impedancia deresultado del equipo conectado no debe ser mayorde 500 .
Descripción de opciones:Sin función. Si selecciona si no se va a utilizar lasalida analógica.
Ref. externa MIN - RefMAX 0-20 mA/4-20 mA.Se obtiene una señal de salida que es proporcionalal valor de referencia de resultado en el intervalo dereferencia mínima, RefMIN - referencia máxima,RefMAX (parámetros 204/205).
FBMIN-FBMAX 0-20 mA/ 4-20 mA.Se obtiene una señal de salida que es proporcionalal valor de realimentación en el intervalo de reali-mentación mínima, FBMIN - realimentación máxima,FBMAX (parámetro 414/415).
0-fMAX 0-20 mA/4-20 mA.Se obtiene una señal de salida que es proporcionala la frecuencia de salida en el intervalo 0 - fMAX
(parámetro 202 Frecuencia máxima, fMAX).
0 - IINV 0-20 mA/4-20 mA.Se obtiene una señal de salida que es proporcionala la intensidad de salida en el intervalo 0 - IINV..
0 - PM,N 0-20 mA/4-20 mA.Se obtiene una señal de salida que es proporcionala la potencia de salida actual. 20 mA correspondeal valor ajustado en el parámetro 102 Potencia delmotor, PM,N.
0 - Temp.MAX 0-20 mA/4-20 mA.Se obtiene una señal de salida proporcional a latemperatura actual del disipador de calor. 0/4 mAcorresponde a una temperatura del disipador de
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss96
VLT® Serie 2800
calor menor de 20 �C, y 20 mA corresponde a 100�C.
323323 Relé 1–3, salida
(SALIDA RELE 1-3)
Valor:Sin función (NO) [0]
✭ Unidad lista (UNIDAD LISTA) [1]Listo en espera (LISTO/SIN ADVERTEN.) [2]En funcionamiento (EN MARCHA) [3]Func. en referencia, sin advertencia(EN REF./SIN ADVERT .) [4]En funcionamiento, sin advertencia(MARCHA/SIN ADVERT .)) [5]Funcionando en rango, sin advertencia(EN RANGO/SIN ADVERT .) [6]Preparado, tensión de red en rango(LISTO/NO SOBRE-BAJA) [7]Alarma o advertencia(ALARM O ADVERTENCIA) [8]Intens. mayor que límite intensidad, par. 221(LIM. INTENS. MOT) [9]Alarma (ALARM) [10]Frec. salida mayor que fLOW par. 225(NIVEL ALTO DE FREC.) [11]Frec. salida menor que fHIGH par. 226(NIVEL BAJO DE FREC.) [12]Intens. salida mayor que ILOW par. 223(NIVEL ALTO DE INTEN.) [13]Intens. salida menor que IHIGH par. 224(NIVEL BAJO DE INTEN.) [14]Realim. mayor que FBLOW par. 227(NIVEL ALTO DE REALI.) [15]Realim. menor que FBHIGH par. 228(NIVEL BAJO DE REALI.) [16]Relé 123 (RELE 123) [17]Inversión (CAMBIO SENTIDO) [18]Advertencia térmica (ADVERTENCIA TERMICO)[19]Funcionamiento local (MODO LOCAL) [20]Salida de pulsos (SALIDA PULSO) [21]Fuera de rango frecuen., par. 225/226(FUERA RANGO FREC.) [22]Fuera de rango de intensidad(FUERA RANGO INTEN.) [23]Fuera de rango realiment.(FUERA RANGO REALIM.) [24]Control de freno mecánico(CTRL. FRENO MECANICO) [25]
Función:La salida de relé se puede utilizar para dar el estadoo advertencia actuales. Esta salida se activa (con-tacto 1–2) cuando se cumple una determinadacondición.
Descripción de opciones:Sin función. se selecciona si el convertidor no debereaccionar a señales.
Unidad lista, cuando hay tensión de alimentación enla tarjeta de control del convertidor, que estápreparado para el funcionamiento.
Listo en espera, cuando el convertidor de frecuenciaestá preparado para funcionar pero no se ha dadoun comando de arranque. Sin advertencia.
En funcionamiento, se ha dado una orden de ar-ranque.
Func. en referencia, sin advertencia velocidadsegún la referencia.
Funcionando, sin advertencia, cuando se ha dadouna orden de arranque. Sin advertencia.
Preparado, tensión de red en rango, el convertidorestá preparado para funcionar, la tarjeta de controlrecibe tensión de red, y no hay señales de controlactivas en las entradas. La tensión de red está den-tro de los límites de tensión.
Alarma o advertencia, la salida está activada poruna alarma o una advertencia.
Límite de intensidad, si la intensidad de salida esmayor que el valor programado en el parámetro 221Límite de intensidad ILIM.
Alarma, la salida está activada por una alarma.
Frecuencia de salida mayor que fLOW, la frecuenciade salida es mayor que el valor ajustado en elparámetro 225 Advertencia: Baja frecuencia, fLOW.
Frecuencia de salida menor que fHIGH, la frecuenciade salida es menor que el valor ajustado en elparámetro 226 Advertencia: Alta frecuencia, fHIGH.
Intensidad de salida mayor que ILOW, la intensidades mayor que el valor ajustado en el parámetro 223Advertencia: Intensidad baja, ILOW
Intensidad de salida menor que IHIGH, cuando la in-tensidad de salida es menor que el valor ajustado enel parámetro 224 Advertencia: Alta intensidad, IHIGH.
Realim. mayor que FBLOW, cuando el valor de reali-mentación es mayor que el valor ajustado en elparámetro 227 Advertencia: Baja realimentación,FBLOW.
Realim. menor que FBHIGH, cuando el valor de reali-mentación es menor que el valor ajustado en el
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 97
Pro
gra
mac
ión

VLT® Serie 2800
parámetro 228 Advertencia: Alta realimentación,IHIGH.
Relé 123 sólo se utiliza en relación con Profidrive.
Inversión, la salida de relé se activa cuando el sen-tido de giro del motor es de derecha a izquierda.Cuando el sentido de giro del motor es de izquierdaa derecha, el valor es 0 V CC.
Advertencia térmica, si se sobrepasa el límite detemperatura en el motor o el convertidor, o desde untermistor conectado a una entrada digital.
Funcionamiento local, si la salida está activadacuando en el parámetro 002 Control local/remoto,Control local [1] está seleccionado.
Salida de pulsos sólo se puede seleccionar en elparámetro 341 Salida digital, terminal 46.
Fuera de rango de frecuencia, si la frecuencia desalida está fuera del rango de frecuencia progra-mado en los parámetros 225 y 226.
Fuera de rango de intensidad, si la intensidad delmotor está fuera del rango programado en losparámetros 223 y 224.
Fuera del rango de realimentación, si la señal de re-alimentación está fuera del rango programado en losparámetros 227 y 228.
Control de freno mecánico, permite controlar unfreno mecánico externo (consulte la sección Controlde freno mecánico en la Guía de Diseño).
327327 Referencia/realimentaciónde pulso
(REF.REALI/PULSOS)
Valor:150 - 67600 Hz ✭ 5000 Hz
Función:Este parámetro se utiliza para ajustar el valor deseñal que corresponde al valor máximo delparámetro 205 Referencia máxima, RefMAX, o alvalor de realimentación máxima ajustado en elparámetro 415 Realimentación máxima, FBMAX.
Descripción de opciones:Ajuste la referencia de pulso o la realimentación depulso requerida que se conectará al terminal 33.
341341 Salida digital terminal 46
(SALIDA ANALOG.46)Valor:
✭ Unidad preparada (UNIDAD PREPARADA) [ 1]
✭ Consulte la selección realizada en el parámetro323 Salida de relé.
Función:La salida digital se puede utilizar para dar el estadoo advertencia actuales. La salida digital (terminal46) proporciona una señal de 24 V CC cuando secumple una determinada condición.
Descripción de opciones:Salida de pulso se selecciona si se requiere una se-cuencia de pulsos que corresponda al valor dereferencia. Salida de pulso sólo se puede selec-cionar en el parámetro 341 Salida digital.
Consulte el parámetro 323 Salida de relé para másdescripciones.
¡NOTA!:El terminal de salida46 no está disponible en DeviceNet/CANopen
342342 Terminal 46, escalado de pulsos máx.
(PULS. MAX 46)
Valor:150 - 10000 Hz ✭ 5000 Hz
Función:Este parámetro se utiliza para ajustar la frecuenciamáxima de la señal de salida de pulsos.
Descripción de opciones:Ajuste la frecuencia deseada.
343343 Función de parada precisa
(PARO PRECISO)
Valor:✭ Parada de rampa normal (NORMAL) [ 0]
Parada de contador con reset(PARO CONT. RESET) [1]Parada de contador sin reset(PARO CONT. NO RESET) [2]Parada compensada con velocidad (PARO COMP.VEL.) [3]
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss98

VLT® Serie 2800
Parada de contador compensada con velocidad yreset ( PAROC. CMP. V RT.) [4]Parada de contador compensada con velocidad sinreset ( PAROC. CMP. V NO RT.) [5]
Función:En este parámetro se selecciona la función deparada que se utilizará en respuesta a un comandode parada. Las seis selecciones de datos incluyenuna rutina de parada precisa que asegura un altonivel de precisión repetida.Estas opciones combinan las funciones descritas acontinuación.
¡NOTA!:Arranque de pulsos [8] no se puedeutilizar con la función de parada precisa.
Descripción de opciones:Parada de rampa normal [0] se selecciona paraobtener una alta precisión repetida en el punto deparada.Parada de contador. Una vez recibida una señal dearranque de pulsos, el convertidor siguefuncionando hasta recibir el número de pulsos pro-gramado por el usuario en el terminal de entrada 33.Así, una señal de parada interna activa el intervalode rampa de deceleración normal (parámetro 208).La función de contador se activa (empieza a tempo-rizar) en el fleco de la señal de arranque (cuandocambia de parada a arranque).Parada compensada con velocidad. Para detener elmotor exactamente en el mismo punto, con indepen-dencia de la velocidad actual, la señal de paradarecibida se retrasará internamente cuando la veloci-dad sea menor que la máxima (ajustada en elparámetro 202).Reset. Parada de contador y Parada compensadacon velocidad se pueden combinar con o sin el reset.Parada de contador con reset [1]. Después de cadaparada precisa, el número de pulsos contados en ladeceleración a 0 Hz se reinicia.
Parada de contador sin reset [2]. El número de pul-sos contados en la deceleración a 0 Hz se calculacon el valor de contador del parámetro 344.
344344 Valor de contador
(CONT. PULSOS)
Valor:1 - 999999 ✭ 100000 pulsos
Función:En este parámetro, puede seleccionar el valor decontador utilizado en la función de parada precisaintegrada (parámetro 343).
Descripción de opciones:El ajuste de fábrica es 100000 pulsos. La frecuenciamás alta (máx. resolución) que puede registrarse enel terminal 33 es de 67,6 kHz.
349349 Retardo compensación de parada
(RETARDO COMP PAR)
Valor:0 ms - 100 ms ✭ 10 ms
Función:En este parámetro, el usuario puede seleccionar eltiempo de retardo del sistema (sensor, PLC, etc.). Sise utiliza la parada compensada con velocidad, elretardo en las distintas frecuencias tendrá un granefecto en la manera que ocurra una parada.
Descripción de opciones:El ajuste de fábrica es 10 ms. Esto significa que elretardo total del sensor, el PLC y otros equipos cor-responderá a dicho ajuste.
¡NOTA!:Sólo se puede uti-lizar en la parada compensada con velocidad.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 99
Pro
gra
mac
ión

VLT® Serie 2800
■ Funciones especiales
400400 Función de freno
(FUNCION FRENO)Valor:No (NO) [0]Freno con resistencia(RESISTENCIA) [1]Freno de CA (FRENO CA) [4]Carga compartida (CARGA COMPARTIDA) [5]
✭ El ajuste de fábrica depende del tipo de equipo.
Función:Freno con resistencia [1] se selecciona si el conver-tidor de frecuencia tiene un transistor de frenoincorporado y se ha conectado una resistencia defreno a los terminales 81 y 82. Se permite una ten-sión del circuito intermedio más alta durante elfrenado (funcionamiento regenerativo) cuando hayconectada una resistencia de freno.Freno de CA [4] se selecciona para mejorar elfrenado sin utilizar resistencias de freno. Tenga pre-sente que Freno de CA [4] no es tan eficaz comoFreno con resistencia [1].
Descripción de opciones:Seleccione Freno con resistencia [1] si hay una re-sistencia de freno conectada.Seleccione Freno de CA [4] si se producen cargasgeneradas a corto plazo. Consulte el parámetro 144Ganancia del freno CA para ajustar este freno.
Seleccione Carga compartida [5] si se utiliza cargacompartida.
¡NOTA!:El cambio de opción no se activará hasta queno se haya desconectado y vuelto a conectar
la tensión de alimentación eléctrica.
405405 Función de reset
(MODO RESET)
Valor:✭ Reset manual (RESET MANUAL) [0]
Reset autom. x 1(AUTOMA TICO X 1) [1]Reset autom. x 3(AUTOMA TICO X 3) [3]Reset autom. x 10(AUTOMA TICO X 10) [10]Reset en encendido(RESET ENCENDIDO) [11]
Función:Este parámetro permite seleccionar si el reinicio y elrearranque después de una desconexión deben re-alizarse manualmente, o si el convertidor debereiniciarse y volver a arrancar automáticamente.Además, se puede seleccionar el número de vecesque se intenta realizar el rearranque. El intervalo detiempo entre cada intento se ajusta en el parámetro406 Tiempo de rearranque automático.
Descripción de opciones:Si se selecciona Reset manual [0], el reinicio debeefectuarse con la tecla [STOP/RESET], una entradadigital o la comunicación serie. Si el convertidor sedebe reiniciar y rearrancar automáticamente de-spués de una desconexión, seleccione el valor dedato [1], [3] o [10].Si Rearranque en encendido [11] se selecciona, elconvertidor se reinicia si se produce un error enrelación con un fallo de alimentación eléctrica.
El motor puede arrancar sin advertencia.
406406 Tiempo de rearranque automático
(TIEMPO AUTOARRAN)
Valor:0 - 10 seg ✭ 5 seg
Función:Este parámetro permite ajustar el período de tiempodesde la desconexión hasta que comienza la fun-ción de reinicio automático. Se presupone que seha seleccionado el reinicio automático en elparámetro 405 Función de reset.
Descripción de opciones:Ajuste el tiempo requerido.
409409 Sobreintens. de retraso de desconexión,ILIM
(INTENS. DE RETRASO DE DESCONEX-IÓN)
Valor:0 - 60 seg. (61=NO) ✭ NO
Función:Cuando el convertidor de frecuencia detecta que laintensidad de salida ha llegado al límiteILIM(parámetro 221 Límite de intensidad) ypermanece en ese límite durante el tiempo selec-cionado, realiza una desconexión. Se puede utilizar
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss100

VLT® Serie 2800
para proteger la aplicación, al igual que ETR prote-gerá el motor, si se selecciona.
Descripción de opciones:Seleccione el tiempo que el convertidor debe man-tener la intensidad de salida en el límite ILIM antesde desconectarse. Si elige NO, el parámetro 409Sobreintens. de retraso de desconexión, ILIM no estáactivado, por lo que no se realizará la desconexión.
411411 Frecuencia de conmutación
(FREC. PORTADORA)Valor:
3000 - 14000 Hz (VLT 2803 - 2875) ✭ 4500 Hz3000 - 10000 Hz (VLT 2880 - 2882) ✭ 4500 Hz
Función:El valor ajustado determina la frecuencia de con-mutación del inversor. Si se cambia la frecuencia deconmutación, puede ayudarse a minimizar el ruidoacústico del motor.
¡NOTA!:La frecuencia de salida del convertidor de fre-cuencia no puede tener un valor superior a 1/
10 de la frecuencia de conmutación.
Descripción de opciones:Cuando el motor está en funcionamiento, la frecuen-cia de conmutación se ajusta en el parámetro 411Frecuencia de conmutación hasta que se obtiene lafrecuencia en que el motor hace el menor ruidoposible.
¡NOTA!:La frecuencia de conmutación se reduceautomáticamente en función de la carga.
Consulte Frecuencia de conmutación dependientede la temperatura en la sección Condiciones espe-ciales .
Cuando se selecciona Filtro LC instalado enel parámetro 412, la frecuencia de conmutación mín-ima es 4,5 kHz.
412412 Frec. conmutación dependiente frec. desalida
(FREC. PORTA. VAR.)
Valor:✭ Sin filtro LC (SIN LC FILTRO) [2]
Filtro LC instalado(LC FILTRO CONECTADO) [3]
Función:El parámetro debe ajustarse en Filtro LC instalado sihay un filtro LC conectado entre el convertidor defrecuencia y el motor.
Descripción de opciones:Filtro LC instalado [3] debe utilizarse si hay un filtroLC conectado entre el convertidor de frecuencia y elmotor, ya que si no el convertidor de frecuencia nopuede proteger el filtro LC.
¡NOTA!:Cuando se selecciona el filtro LC, lafrecuencia de conmutación cambia a 4,5 kHz.
413413 Función de sobremodulación
(SOBREMODULACION)Valor:No (NO) [0]
✭ Sí (SI) [1]
Función:Este parámetro permite conectar una función de so-bremodulación para la tensión de salida.
Descripción de opciones:No [0] significa que no hay sobremodulación de latensión de salida, por lo que se evita el rizado delpar en el eje del motor. Puede ser una función útil,p. ej., en máquinas trituradoras.Sí [1] significa que puede obtenerse una tensión desalida mayor que la tensión de alimentación eléc-trica (hasta el 5 %).
414414 Realimentación mín, FBMIN
(REALIM.MIN)
Valor:-100.000,000 - parám. 415 FBMAX ✭ 0
Función:Los parámetros 414 Realimentación mín., FBMIN y415 Realimentación máx., FBMAX se utilizan para es-calar el texto del display, para que muestre la señalde realimentación en unidades proporcionales a laseñal en la entrada.
Descripción de opciones:Ajuste el valor que va a mostrarse en el displaycomo el valor de señal de realimentación mínima en
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 101
Pro
gra
mac
ión

VLT® Serie 2800
la entrada de realimentación seleccionada (parámet-ros 308/314 Entradas digitales).
415415 Realimentación máx., FBMAX
(REALIM.MAX)
Valor:FBMIN - 100.000,000 ✭ 1.500,000
Función:Consulte la descripción del parámetro 414 Reali-mentación mín., FBMIN.
Descripción de opciones:Ajuste el valor que se mostrará en el display cuandose obtenga la máxima realimentación en la entradade realimentación seleccionada (parámetros 308/314 Entradas analógicas).
416416 Unidad de proceso
(UNIDAD PROCESO)
Valor:✭ Sin unidad ( NINGUNO) [0]
% (%) [1]ppm (PPM) [2]rpm (RPM) [3]bar (BAR) [4]Ciclos/min (CICLO/MI) [5]Pulsos/seg (PULSO/S) [6]Unidades/seg (UNID/S) [7]Unidades/min (UNID/MI) [8]Unidades/hora (UNID/H) [9]�C (�C) [10]Pa (PA) [11]l/s (L/S) [12]m3/s (M3/S) [13]l/min (L/M) [14]m3/min (M3/MIN) [15]l/hora (L/H) [16]m3/h (M3/H) [17]Kg/seg (KG/S) [18]Kg/min (KG/MIN) [19]Kg/hora (KG/H) [20]Toneladas/min (T/MIN) [21]Toneladas/hora (T/H) [22]Metros (M) [23]Nm (NM) [24]m/seg (M/S) [25]m/min (M/MIN) [26]�F (�F) [27]In wg (IN WG) [28]Gal/seg (GAL/S) [29]Pies3/seg (FT3/S) [30]Gal/min (GAL/MIN) [31]Pies3/min (FT3/MIN) [32]Gal/hora (GAL/H)
[33]Pies3/hora (FT3/H) [34]Libras/seg (LB/S) [35]Libras/min (LB/MIN) [36]Libras/hora (LB/H) [37]Libras/pie (LB FT) [38]Pies/seg (FT/S) [39]Pies/min (FT/MIN) [40]
Función:Seleccione entre las unidades que se mostrarán enel display. Las unidades pueden leerse cuando seha conectado un panel de control LCP, si se ha se-leccionado Referencia [unidad] [2] o Realimentación[unidad] [3] en uno de los parámetros 009-012Líneas del display, y está en el modo de Display.Las unidades se utilizan en Lazo cerrado y comounidades de la Referencia mín./máx. y la Reali-mentación mín./máx.
Descripción de opciones:Seleccione las unidades requeridas para la señal dereferencia/realimentación.
■ Controladores de VLT 2800El VLT 2800 tiene dos controladores PID integrados,uno para regular la velocidad y otra para regular losprocesos.La regulación de velocidad y de proceso requiereuna señal de realimentación que vuelva a una en-trada. Hay varios ajustes para ambos controladoresPID que se efectúan en los mismos parámetros,aunque la selección del tipo de controlador tendráefecto en las selecciones que se realicen en estosparámetros compartidos.En el parámetro 100 Configuración es posible selec-cionar el tipo de controlador, Velocidad, modo enlazo cerrado [1] o Proceso, modo en lazo cerrado [3].
Regulación de velocidadEsta regulación de PID está optimizada parautilizarla en aplicaciones en que es necesario man-tener una determinada velocidad del motor. Losparámetros específicos del controlador de velocidadson del 417 al 421.
Regulación de procesoEl controlador PID mantiene un modo de procesoconstante (presión, temperatura, flujo, etc.) y ajustala velocidad del motor a partir de la referencia/valorde referencia y la señal de realimentación.Un transmisor proporciona al controlador PID unaseñal de realimentación como expresión del modo
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss102

VLT® Serie 2800
real del proceso. La señal de realimentación varía amedida que cambia la carga del proceso.Esto significa que hay una diferencia entre la refer-encia/valor de referencia y el modo real del proceso.Dicha diferencia se compensa por el controlador PIDmediante la frecuencia de salida regulada de man-era ascendente o descendente en relación con ladiferencia entre la referencia/valor de referencia y laseñal de realimentación.
El controlador PID integrado en el convertidor defrecuencia se ha optimizado para utilizarlo en aplica-ciones de procesos. Esto significa que el convertidorde frecuencia tiene disponibles una serie de fun-ciones especiales.Antes era necesario obtener un sistema que mane-jara estas funciones especiales instalando módulosde E/S adicionales, y programando el sistema. Conel convertidor de frecuencia, se evita la necesidadde instalar más módulos. Los parámetros específi-cos del controlador de proceso son del 437 al 444.
■ Funciones de PIDUnidad de referencia/realimentación
Cuando se selecciona Velocidad, modo en lazo cer-rado en el parámetro 100 Configuración, la unidadde referencia/realimentación siempre es rpm.Cuando Proceso, modo en lazo cerrado se selec-ciona en el parámetro 100 Configuración, la unidadse define en el parámetro 416 Unidad de proceso.
RealimentaciónDebe preajustarse un rango de realimentación paraambos controladores. Al mismo tiempo, este rangode realimentación limita el posible rango de referen-cia, para que si la suma de todas las referenciascae fuera del mismo, la referencia quede limitada adicho rango de realimentación.La señal de realimentación se debe conectar a unterminal del convertidor. Si se selecciona la reali-mentación en dos terminales a la vez, las dosseñales se sumarán.Utilice la siguiente descripción para determinar losterminales se que deben utilizar y qué parámetrosse deben programar.
Tipo de reali-mentación
Terminal Parámetros
Pulso 33 307, 327Tensión 53 308, 309, 310Intensidad 60 314, 315, 316
Puede realizarse una corrección de la pérdida detensión en los cables de señal largos cuando se util-ice un transmisor con una salida de tensión. Esto serealiza en el grupo de parámetros 300 Escaladomín./máx.
Los parámetros 414/415 Realimentación mín./máx.también se deben preajustar en unos valores en lasunidades de proceso que correspondan a los val-ores de escalado mínimo y máximo que tengan lasseñales conectadas al terminal.
ReferenciaEn el parámetro 205 Referencia máxima, RefMAX esposible preajustar una referencia máxima que escalela suma de todas las referencias, es decir, la refer-encia de resultado.La referencia mínima del parámetro 204 es unaexpresión del valor mínimo que puede tener la refer-encia de resultado.Todas las referencias se sumarán, y la suma será lareferencia en relación con la que se realizará la reg-ulación. Es posible limitar el rango de referencia aotro rango más pequeño que el de realimentación.Esto es una ventaja si se desea evitar un cambio nointencionado en una referencia externa, al hacer quela suma de las referencias se aleje del valor óptimo.El rango de referencia no puede ser mayor que elrango de realimentación.Si se desean referencias internas, pueden preajus-tarse en los parámetros 215 a 218 Referenciainterna. Consulte Función de referencia y Manejo dereferencias.Si se utiliza una señal de intensidad como señal derealimentación, sólo se podrá utilizar la tensión comoreferencia analógica. Utilice la siguiente descripciónpara determinar el terminal que debe utilizarse y losparámetros que es necesario programar.
Tipo de refer-encia
Terminal Parámetros
Pulso 33 307, 327Tensión 53 308, 309, 310Intensidad 60 314, 315, 316Referenciasinternas
215-218
Referencia debus
68+69
Tome en cuenta que la referencia de bus sólo sepuede preajustar mediante la comunicación serie.
¡NOTA!:Es recomendable preajustar los ter-minales que no se utilizan en Sin función [0].
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 103
Pro
gra
mac
ión

VLT® Serie 2800
Límite de ganancia diferencialSi ocurren variaciones muy rápidas en la señal dereferencia o de realimentación en una aplicación, ladiferencia entre la referencia/ajuste y el modo realdel proceso también cambiará rápidamente. El difer-enciador puede llegar a ser demasiado importante.Esto se debe a que está reaccionando a la diferen-cia entre la referencia y el modo real del proceso, ycuanto más rápidamente cambia esta diferencia,más importante es la contribución de frecuencia deldiferenciador. La frecuencia con que contribuye eldiferenciador, por lo tanto, puede limitarse de man-era que se preajuste un tiempo de diferenciaciónadecuado para cambios lentos y una contribución defrecuencia para cambios rápidos. Esto se realizacon la regulación de velocidad del parámetro 420Límite de ganancia D PID y la regulación de procesodel parámetro 443 Límite gananc. diferencial PID.
Filtro de paso bajoSi hay mucho ruido en la señal de realimentación,puede amortiguarse utilizando un filtro de paso bajointegrado. Se preajusta una constante de tiempoadecuada para el filtro de paso bajo.Si el filtro de paso bajo se preajusta en 0,1 seg, lafrecuencia de desconexión será de 10 RAD/seg, quecorresponde a (10 / 2 x �) = 1,6 Hz. Esto significaque se amortiguarán todas las intensidades/ten-siones que varíen en más de 1,6 oscilaciones porsegundo. En otras palabras, sólo habrá una regu-lación basada en una señal de realimentación quevaríe en una frecuencia menor de 1,6 Hz. La con-stante de tiempo adecuada se puede seleccionar enla regulación de velocidad del parámetro 421 FiltroPID y en la regulación de proceso del parámetro444 Tiempo filtro paso bajo de PID.
Regulación inversaEn la regulación normal, la velocidad del motor au-menta cuando la referencia/ajuste es mayor que la
señal de realimentación. Si es necesario realizar laregulación inversa, en que la velocidad se reducecuando la referencia/ajuste es mayor que la señalde realimentación, el parámetro 437 Regulación nor-mal/inversa de PID debe programarse en Inversa.
SaturaciónEl controlador de proceso se preajusta en fábricacon una función de saturación activada. Esta fun-ción significa que cuando se alcance un límite defrecuencia, un límite de intensidad o un límite detensión, el intregrador se inicializará a la frecuenciaque corresponda a la frecuencia de salida actual.Esto evita la integración de una diferencia entre lareferencia y el modo real del proceso que no sepuede desregular mediante un cambio en la veloci-dad. Esta función se puede deseleccionar en elparámetro 438 Saturación de PID.
Condiciones de arranqueEn algunas aplicaciones, el ajuste óptimo del contro-lador de proceso requiere que transcurra un largoperíodo de tiempo antes de que se alcance la condi-ción deseada del proceso. En estas aplicaciones, esrecomendable definir una frecuencia de salida a laque el convertidor deba hacer funcionar el motorantes de que se active el controlador de proceso.Esto se realiza programando una frecuencia de ar-ranque en el parámetro 439 Frecuencia de arranquede PID.
■ Manejo de realimentaciónEl manejo de la realimentación se describe en elsiguiente diagrama de flujo.Este diagrama muestra los parámetros y la maneraen que pueden afectar al manejo de la reali-mentación. Es posible elegir entre señales derealimentación de tensión, intensidad o pulsos.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss104

VLT® Serie 2800
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 105
Pro
gra
mac
ión

VLT® Serie 2800
¡NOTA!:Los parámetros 417-421 sólo se utilizan si enel parámetro 100 Configuración se ha selec-
cionado Velocidad, modo en lazo cerrado [1].
417417 Ganancia proporcional de PID
(PROPORCIONAL P)
Valor:0,000 (NO) - 1,000 ✭ 0,010
Función:La ganancia proporcional indica cuántas veces debeamplificarse el error (desviación entre la señal de re-alimentación y el valor de consigna deseado).
Descripción de opciones:Se obtiene una regulación rápida a un valor elevadode amplificación, pero si ésta es demasiado alta, elproceso se puede volver inestable en el caso demodulación excesiva.
418418 Tiempo de integral PID
(VELOC.INTEGRAL I)
Valor:20,00 - 999,99 ms (1000 = NO) ✭ 100 ms
Función:El tiempo de integral determina cuánto tiempo tardael controlador PID en corregir el error. Cuanto mayores el error, más rápidamente aumenta la contribu-ción de frecuencia del integrador. El tiempo deintegral es el tiempo que necesita el integrador paralograr el mismo cambio que la ganancia propor-cional.
Descripción de opciones:Se obtiene una regulación rápida con un tiempo deintegral corto. Sin embargo, si el espacio de tiempoes demasiado corto, el proceso se puede volver in-estable. Si el tiempo de integral es demasiado largo,pueden producirse desviaciones importantes de lareferencia requerida, porque el controlador de pro-
ceso tardará mucho tiempo en regular en caso deerror.
419419 Tiempo diferencial PID
(VELOC.DIFEREN. D)Valor:
0,00 (NO) - 200,00 ms ✭ 20,00 ms
Función:El diferenciador no reacciona a un error constante.Sólo realiza una contribución cuando cambia el er-ror. Cuanto más rápidamente cambia el error, mayores la ganancia del diferenciador. La contribución esproporcional a la velocidad con que cambia el error.
Descripción de opciones:Se obtiene un control rápido con un tiempo diferen-cial largo. Sin embargo, si el espacio de tiempo esdemasiado largo, el proceso se puede volver in-estable. Cuando el tiempo diferencial es 0 ms, lafunción D no está activada.
420420 Límite de ganancia D PID
(LIM.GAN.D)Valor:
5,0 - 50,0 ✭ 5,0
Función:Es posible limitar la ganancia proporcionada por eldiferenciador. La ganancia D se incrementa a altasfrecuencias, por lo que limitarla puede ser muy útil.Esto permite obtener un enlace D puro a bajas fre-cuencias y un enlace D constante a frecuenciasaltas.
Descripción de opciones:Seleccione el límite de ganancia requerido.
421421 Filtro PID
(VELOC.FILTRO PID)
Valor:20 - 500 ms ✭ 100 ms
Función:El ruido en la señal de realimentación se amortiguacon el filtro de paso bajo de primer orden para re-ducir el impacto del ruido en la regulación. Estopuede ser una ventaja, por ejemplo, si hay muchoruido en la señal. Consulte el dibujo.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss106

VLT® Serie 2800
Descripción de opciones:Si se programa una constante de tiempo (t) de 100ms, la frecuencia de desconexión del filtro será de 1/0,1 = 10 RAD/seg, que corresponde a (10 / 2 x �) =1,6 Hz. El controlador PID sólo regulará una señalde realimentación que varíe con una frecuenciamenor de 1,6 Hz. Si esta señal varía en una fre-cuencia mayor de 1,6 Hz, el filtro de paso bajo laamortiguará.
423423 Tensión U1(TENSIÓN U1)
Valor:0,0 -999,0 V ✭ parám. 103
Función:Los parámetros 423-428 se utilizan cuando en elparámetro 101Características de par se ha selec-cionadoCaracterísticas de motor especial [8]. Esposible determinar una característica U/f a partir decuatro tensiones y tres frecuencias definibles. Latensión a 0 Hz se ajusta en el parámetro 133 Ten-sión de arranque.
Descripción de opciones:Ajuste la tensión de salida (U1) que debe coincidircon la primera frecuencia de salida (F1), parámetro424 Frecuencia F1
424424 Frecuencia F1
(FRECUENCIA F1 )
Valor:0,0 - parám. 426 Frecuencia F2✭ Parám. 104 Frecuencia del motor
Función:Consulte el parámetro 423 Tensión U1.
Descripción de opciones:Ajuste la frecuencia de salida (F1) que debe coin-cidir con la primera tensión de salida (U1),parámetro 423 Tensión U1.
425425 Tensión U2(TENSION U2)
Valor:0,0 - 999,0 V ✭ parám. 103
Función:Consulte el parámetro 423 Tensión U1.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 107
Pro
gra
mac
ión

VLT® Serie 2800
Descripción de opciones:Ajuste la tensión de salida (U2) que debe coincidircon la segunda frecuencia de salida (F2), parámetro426 Frecuencia F2.
426426 Frecuencia F2(FRECUENCIA F2 )
Valor:Parám. 424 Frecuencia F1 - parám. 428 FrecuenciaF3
✭ Parám. 104 Frecuencia del motor
Función:Consulte el parámetro 423 Tensión U1 .
Descripción de opciones:Ajuste la frecuencia de salida (F2) que debe coin-cidir con la segunda tensión de salida (U2),parámetro 425 Tensión U2.
427427 Tensión U3
(TENSION U3)Valor:
0,0 - 999,0 V ✭ parám. 103
Función:Consulte el parámetro 423 Tensión U1.
Descripción de opciones:Ajuste la tensión de salida (U3) correspondiente a latercera frecuencia de salida (F3), en el parámetro428 Frecuencia F3.
428428 Frecuencia F3
(FRECUENCIA F3)
Valor:Par. 426 Frec. F2 - 1000 Hz✭ Par. 104 Frec. motor
Función:Consulte el parámetro 423 Tensión U1 .
Descripción de opciones:Ajuste la frecuencia de salida (F3) que debe coin-cidir con la tercera tensión de salida (U3), en elparámetro 427 Tensión U3.
¡NOTA!:Los parámetros 437-444 sólo se utilizan si enel parámetro 100 Configuración se ha selec-
cionado Proceso, modo en lazo cerrado. [3].
437437 Regulación normal/inversa de PID
(PROC.PID INVERSO)Valor:
✭ Normal ( NORMAL) [0]Inverse ( INVERSO) [1]
Función:Es posible elegir si el controlador va a incrementar oreducir la frecuencia de salida, en caso de que hayauna desviación entre la referencia/valor de consignay el modo del proceso.
Descripción de opciones:Si el convertidor de frecuencia debe reducir lafrecuencia de salida cuando aumente la señal de re-alimentación, seleccione Normal [0].Si el convertidor debe incrementar la frecuencia desalida cuando aumente la señal de realimentación,seleccione Inverso [1].
438438 Saturación de PID(PROC.PID SATURA)
Valor:Sin control (NO) [0]
✭ Con control (SÍ) [1]
Función:Es posible seleccionar si el controlador de procesova a continuar regulando en una desviación aunqueno sea posible aumentar o reducir la frecuencia desalida.
Descripción de opciones:El ajuste de fábrica es Con control [1], que significaque el enlace de integral se inicializa respecto a lafrecuencia de salida, si se alcanza el límite de inten-sidad, el límite de tensión o la frecuencia máx./mín.El controlador no se vuelve a activar hasta que el er-ror es cero o haya cambiado de signo. SeleccioneSin control [0] si el integrador debe seguir inte-grando en la desviación, aunque no se puedaeliminar el error mediante dicho control.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss108

VLT® Serie 2800
¡NOTA!:Si se selecciona Sin control [0], significa quecuando la desviación cambia de signo arit-
mético, el integrador debe integrar desde el nivelobtenido como resultado del resultado anterior, antesde que ocurra un cambio en la frecuencia de salida.
439439 Frecuencia de arranque de PID
(PROC. ARRANQUE)
Valor:fMIN - fMAX (parámetros 201/202)✭ Parám. 201 Frecuencia mínima, fMIN
Función:Cuando se recibe la señal de arranque, el conver-tidor de frecuencia reacciona como Lazo abierto yno cambia a Lazo cerrado hasta que se alcance lafrecuencia de arranque programada. Esto permiteajustar una frecuencia que corresponde a la veloci-dad en que se realiza normalmente el proceso, loque lleva a que se alcancen más rápidamente lascondiciones requeridas del mismo.
Descripción de opciones:Ajuste la frecuencia de arranque deseada.
¡NOTA!:Si el convertidor de frecuencia está fun-cionando en el límite de intensidad antes de
obtenerse la frecuencia de arranque requerida, elcontrolador del proceso no se activará. Para que elcontrolador se active siempre, la frecuencia de ar-ranque debe descender hasta la frecuencia desalida requerida. Esto puede conseguirse con el sis-tema en funcionamiento.
440440 Ganancia proporcional de PID
(PROC. GANANCIA P)
Valor:0,0 - 10,00 ✭ 0,01
Función:La ganancia proporcional indica el número de vecesque debe aplicarse la desviación entre el valor ajus-tado y la señal de realimentación.
Descripción de opciones:Se obtiene una regulación rápida con una gananciaalta, aunque si es excesiva, el proceso puede vol-verse inestable debido a la sobremodulación.
441441 Tiempo de integral de PID(PROC. INTEGRAL I)
Valor:0,01 - 9999,99 (NO) ✭ NO
Función:El integrador proporciona un incremento de laganancia a un error constante entre la referencia/valor ajustado y la señal de realimentación. Cuantomayor es el error, más rápidamente se incrementa lacontribución de frecuencia del integrador. El tiempode integral es el que necesita el integrador para re-alizar el mismo cambio que la ganancia proporcional.
Descripción de opciones:Se obtiene una regulación rápida con un tiempo deintegral corto. Sin embargo, si este tiempo es insufi-ciente, puede volver el proceso inestable debido a lasobremodulación. Si eI tiempo de integral es largo,pueden ocurrir desviaciones importantes del valorde consigna requerido, ya que el controlador tardarámucho en regular en relación con un error.
442442 Tiempo diferencial de PID(PROC. DIFEREN. D)
Valor:0,00 (NO) - 10,00 seg ✭ 0,00 seg
Función:El diferenciador no reacciona a un error constante.Sólo proporciona una ganancia cuando cambia elerror. Cuanto más rápidamente cambia ladesviación, mayor es la ganancia del diferenciador.La ganancia es proporcional a la velocidad en quecambia la desviación.
Descripción de opciones:Se obtiene una regulación rápida con un tiempodiferencial largo. Sin embargo, si el tiempo es de-
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 109
Pro
gra
mac
ión

VLT® Serie 2800
masiado largo, el proceso puede volverse inestabledebido a la sobremodulación.
443443 Límite gananc. diferencial PID
(PROC. GANANCIA D)Valor:
5,0 - 50,0 ✭ 5,0
Función:Es posible ajustar un límite de ganancia diferencial.La ganancia diferencial se incrementa si hay cam-bios rápidos, por lo que puede ser ventajosa paralimitar esta ganancia. Además, se obtiene unaganancia diferencial pura en cambios lentos y unagannacia diferencial constante en cambios rápidosen la desviación.
Descripción de opciones:Seleccione el límite de ganancia diferencial re-querido.
444444 Tiempo filtro paso bajo de PID
(PROC. FILTRO PID)Valor:
0,02 - 10,00 ✭ 0,02
Función:El ruido de la señal de realimentación se amortiguapor el filtro de paso bajo de primer orden, a fin dereducir el impacto del ruido en la regulación de pro-ceso. Puede ser una ventaja, por ejemplo, cuandola señal tiene mucho ruido.
Descripción de opciones:Seleccione la constante de tiempo requerida (t). Sise programa una constante de tiempo (t) de 0,1 seg,la frecuencia de desconexión del filtro de paso bajoserá de 1/0,1 = 10 RAD/seg, que corresponde a (10/( 2 x �)) = 1,6 Hz. El controlador de proceso sóloregulará una señal de realimentación que varíe enuna frecuencia menor de 1,6 Hz. Si esta señal varíaen una frecuencia mayor de 1,6 Hz, el filtro de pasobajo la amortiguará.
445445 Motoren giro
(MOTOR EN GIRO)
Valor:✭ No (NO) [0]
Mismo sentido(OK-MISMO SENTIDO) [1]Ambos sentidos
(OK-AMBOS SENTIDOS) [2]Freno CC y arranque(FRENO CC ARRANQUE) [3]
Función:Esta función permite ’enganchar’ el eje de un motoren giro que ya no está bajo el control del convertidorde frecuencia, por ejemplo, debido a una interrup-ción del suministro eléctrico. Se activa cada vez quese da una orden de arranque. Para que el conver-tidor pueda ’enganchar’ el eje del motor en giro, lavelocidad del motor debe ser inferior a la frecuenciacorrespondiente del parámetro 202 Frecuencia máx-ima, fMAX.
Descripción de opciones:Seleccione No [0] si no se requiere esta función.
Seleccione Mismo sentido [1] si el eje del motor sólodebe rotar en el mismo sentido al conectarse.Mismo sentido [1] se debe seleccionar si en elparámetro 200 Rango de frecuencia de salida se haelegido Sentido hora.
Seleccione Ambos sentidos [2] si el motor debepoder girar en ambos sentidos al conectarse.
Seleccione Freno CC y arranque [3] si el convertidorde frecuencia debe frenar el motor con el freno deCC primero, seguido del arranque. Se presuponeque los parámetros 126-127/132 Freno de CC estánseleccionados. En el caso de un elevado efecto de’autorrotación’ (motor en giro), el convertidor de fre-cuencia no puede ’enganchar’ un motor en giro sinque se seleccione Freno de CC y arranque.
Limitaciones:- Una inercia demasiado baja producirá una acel-
eración de la carga, lo que puede ser peligroso oimpedir el enganche del motor en giro. En estecaso, utilice el freno de CC.
- Si la carga resulta dirigida, por ejemplo, por elefecto de ’autorrotación’ (motor en giro), la unidadpuede desconectarse debido a sobretensión.
- El enganche del motor en giro no funciona a val-ores menores de 250 rpm.
451451 Factor FFW
(FACTOR FFW)Valor:
0 - 500 % ✭ 100 %
Función:Este parámetro sólo está activado cuando en elparámetro 100 Configuración se ha seleccionado
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss110

VLT® Serie 2800
Velocidad, modo en lazo cerrado. La función FFenvía una parte mayor o menor de la señal de refer-encia fuera del controlador PID, de manera que elcontrolador sólo tenga efecto en una parte de laseñal de control. Todos los cambios en el valor ajus-tado tendrán un efecto inmediato en la velocidad delmotor. El factor FF proporciona un gran dinamismocuando cambia el valor de referencia y menor sobre-modulación.
Descripción de opciones:El valor de % requerido se puede seleccionar en elintervalo fMIN - fMAX. Se utilizan valores mayores de100 % si las variaciones del valor ajustado son pe-queñas.
452452 Gama del controlador
(PID CONTR. RANGE)Valor:
0 - 200 % ✭ 10 %
Función:Este parámetro sólo está activado cuando en elparámetro 100 Configuración se ha seleccionadoVelocidad, modo en lazo cerrado.La gama del controlador (ancho de banda) limita lasalida del controlador PID como % de la frecuenciadel motor fM,N.
Descripción de opciones:El valor de % requerido se puede seleccionar parala frecuencia del motor fM,N. Si se reduce la gamadel controlador, las variaciones de la velocidadserán menores durante la adaptación inicial.
456456 Reducción tensión de freno
(RED. TENS. FRENO)
Valor:0 - 25 V si equipo de 200V ✭ 00 - 50 V si equipo de 400V ✭ 0
Función:El usuario ajusta la tensión en que se reducirá elnivel de resistencia del frenado. Sólo se activará sise ha seleccionado Freno con resistencia en elparámetro 400.
Descripción de opciones:Cuanto mayor sea el valor de reducción, más rápidose reaccionará a una sobrecarga generativa. Sólo
se debe utilizar si ocurren problemas de sobreten-sión en el circuito intermedio.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 111
Pro
gra
mac
ión

VLT® Serie 2800
■ Comunicación serie para el VLT 2800
■ Protocolos
Todos los convertidores de frecuencia están equipa-dos con un puerto RS 485 de forma estándar, quepermite elegir entre dos protocolos distintos. Losdos protocolos que pueden seleccionarse en elparámetro 512 Tipo de telegrama, son:• Protocolo Profidrive• Protocolo de Danfoss FC
Para seleccionar el protocolo de Danfoss FC, elparámetro 512 Tipo de telegrama se debe ajustaren Protocolo FC [1].
■ Tráfico de telegramasTelegramas de control y de respuestaEl tráfico de telegramas en un sistema de master-esclavo está controlado por el master. Es posibleconectar hasta 31 esclavos a un master, a menosque se utilicen repetidores. Si se emplean repeti-dores, pueden conectarse hasta 126 esclavos a unmaster.
El master envía telegramas constantemente dirigi-dos a los esclavos y espera a recibir los telegramasde respuesta de éstos. El tiempo de respuesta delesclavo es de 50 ms como máximo.
Sólo el esclavo que ha recibido un telegrama sinerrores enviado a su dirección puede enviar un tele-grama de respuesta.
Transmisión repetidaEl master puede enviar el mismo telegrama si-multáneamente a todos los esclavos conectados albus. Durante esta comunicación de transmisiónrepetida, el esclavo no envía telegramas de re-spuesta al master en relación con la correctarecepción del telegrama. La comunicación de trans-
misión repetida se ajusta en formato de dirección(ADR), consulte Estructura del telegrama.
Contenido de un carácter (byte)Cada carácter transferido empieza con un bit de ini-cio. Después se transfieren 8 bits de datos, quecorresponden a un byte. Cada carácter queda ase-gurado mediante un bit de paridad, que se ajusta en"1" cuando se llega a la paridad (es decir, cuandohay el mismo número de unos en total en los 8 bitsde datos y en el bit de paridad). Un carácter secompleta con un bit de parada, por lo que consisteen 11 bits en total.
■ Estructura de telegramasCada telegrama empieza con un carácter de inicio(STX) = 02 Hex, seguido de un byte que indica lalongitud del telegrama (LGE) y otro byte que indicala dirección del convertidor de frecuencia (ADR). De-spués, hay un número de bytes de datos (variable,dependiendo del tipo de telegrama). El telegrama secompleta con un byte de control de datos (BCC).
Tiempos de telegrama
MG.28.E5.05 - VLT es una marca registrada de Danfoss112

VLT® Serie 2800
La velocidad de comunicación entre un master y unesclavo depende de la velocidad en baudios. La ve-locidad en baudios del convertidor de frecuenciadebe ser la misma que la del master, y se puede se-leccionar en el parámetro 501 Velocidad en baudios.Después de un telegrama de respuesta de un es-clavo, debe haber una pausa de 2 caracteres (22bits) como mínimo antes de que el master puedaenviar otro telegrama. A una velocidad de 9600 bau-dios, la pausa debe ser de 2,3 ms como mínimo.Cuando el master haya completado el telegrama, eltiempo de respuesta del esclavo al master será de20 ms como máximo, y habrá un pausa de al menos2 caracteres.
Tiempo de pausa, mín.: 2 caracteresTiempo de respuesta, mín.: 2 caracteresTiempo de respuesta, máx.: 20 ms
El tiempo entre los caracteres individuales en untelegrama no puede ser más de 2 caracteres, y eltelegrama se debe completar en 1,5 veces x tiemponominal de telegrama. A una velocidad de 9600baudios y una longitud de telegrama de 16 bytes, eltelegrama se completará en 27,5 mseg.
Longitud del telegrama (LGE)La longitud de un telegrama es el número de bytesde datos más el byte de dirección ADR, más el bytede control de datos BCC.
La longitud de los telegramas con 4 bytes de datoses:LGE = 4 + 1 + 1 = 6 bytesLa longitud de los telegramas con 12 bytes de datoses:LGE = 12 + 1 + 1 = 14 bytesLa longitud de los telegramas que contienen texto es10+n bytes. El 10 representa los caracteres fijos,
mientras que ’n’ es variable (dependiendo de la lon-gitud del texto).
Dirección del convertidor de frecuencia (ADR)Se utilizan dos formatos de dirección distintos, y elrango de direcciones del convertidor de frecuenciapuede ser 1-31 o 1-126.
1. Formato de dirección 1-31El byte del rango de direcciones 1-31 tiene el sigu-iente perfil:
Bit 7 = 0 (formato de dirección 1-31 activado)Bit 6 no se utilizaBit 5 = 1: Transmisión repetida, los bits de direc-ción (0-4) no se utilizanBit 5 = 0: Sin transmisión repetidaBit 0-4 = Dirección del convertidor de frecuencia1-31
2 Formato de dirección 1-126El byte para el rango de direcciones 1 - 126 tiene elsiguiente perfil:
Bit 7 = 1 (formato de dirección 1-126 activado)Bit 0-6 = Dirección del convertidor de frecuencia1-126Bit 0-6 = 0 Transmisión repetida
El esclavo envía el byte de dirección sin cambios enel telegrama de respuesta al master.
Ejemplo:Escritura a un convertidor con la dirección 22 y conel formato de dirección 1-31:
Byte de control de datos (BCC)El byte de control de datos se explica en este ejem-plo:
MG.28.E5.05 - VLT es una marca registrada de Danfoss 113
Pro
gra
mac
ión

VLT® Serie 2800
Antes de que se reciba el primer byte del telegrama,la suma de comprobación calculada (BCS) es 0.
Cuando el primer byte (02H) se haya recibido:BCS = BCC EXOR “primer byte"(EXOR = puerta exclusiva)
BCS = 0 0 0 0 0 0 0 0EXOR
1. byte = 0 0 0 0 0 0 1 0 (02H)BCC = 0 0 0 0 0 0 1 0
Cada byte subsiguiente se direcciona con BCSEXOR y produce un nuevo BCC, p. ej:
BCS = 0 0 0 0 0 0 1 0EXOR
2º byte = 1 1 0 1 0 1 1 0 (D6H)BCC = 1 1 0 1 0 1 0 0
■ Carácter de dato (byte)La estructura de los bloques de datos depende deltipo de telegrama. Hay tres tipos de telegrama, ycada tipo corresponde tanto a los telegramas decontrol (master ⇒ esclavo) como a los de respuesta(esclavo⇒ master). Los tres tipos son los siguientes:- Bloque de parámetro, utilizado para transferir
parámetros entre un master y un esclavo. Elbloque de datos está formado por 12 bytes (6códigos) y también contiene el bloque de pro-ceso.
- El bloque de proceso está formado por un bloquede datos de cuatro bytes (2 códigos) y contiene:- El código de control y el valor de referencia- El código de estado y la frecuencia de salidaactual (de esclavo a master)
- El bloque de texto, utilizado para leer o escribirtexto mediante el bloque de datos.
Comandos de parámetros y respuestas (AK) .
Los Bits nº 12-15 se utilizan para transferir los co-mandos de parámetros del master al esclavo, y las
MG.28.E5.05 - VLT es una marca registrada de Danfoss114

VLT® Serie 2800
respuestas procesadas del esclavo de vuelta almaster.
Comando de parámetro master ⇒ esclavoNº Bit15 14 13 12 Comando de parámetro0 0 0 0 Sin comando0 0 0 1 Valor de lectura de parámetro0 0 1 0 Valor de escritura de parámetro
en RAM(código)
0 0 1 1 Valor de escritura de parámetroen RAM(doble código)
1 1 0 1 Valor de escritura de parámetroen RAMy EEprom (doble código)
1 1 1 0 Valor de escritura de parámetroen RAMy EEprom (código)
1 1 1 1 Texto de lectura/escritura
Respuesta esclavo⇒ masterNº Bit Respuesta15 14 13 120 0 0 0 Sin respuesta0 0 0 1 Valor de parámetro transferido
(código)0 0 1 0 Valor de parámetro transferido
(doble código)0 1 1 1 Comando no ejecutable1 1 1 1 Texto transferido
Si el comando no se puede realizar, el esclavo envíaesta respuesta : 0111 Comando no puede ejecu-tarse y da el siguiente informe de fallo en el valorde parámetro (PWE):
Respuesta(0111)
Informe de fallo
0 El nº de parámetro utilizado noexiste
1 No hay acceso de escritura alparámetrodefinido
2 El valor de dato es mayorque el límite del parámetro
3 El subíndiceno existe
4 El parámetro no es del tipo degrupo
5 El tipo de dato no coincide conel definido en el parámetro
17 El cambio de dato en el parámetrodefinido no es posible en el modoactualdel convertidor de frecuencia.Algunos parámetros sólo sepueden cambiarcuando el motor está apagado
130 No hay acceso del busal parámetro definido
131 El cambio de dato no es posibleporque está seleccionado elAjuste de fábrica
Número de parámetro (PNU)Los Bits nº 0-10 se utilizan para transferir el númerode los parámetros. La función de cada parámetro seexplica en las descripciones de la sección tituladaProgramación.
Indice
El índice se utiliza con el número de parámetro parael acceso de lectura/escritura a los parámetros coníndice, por ejemplo, el parámetro 615 Código de er-ror. El índice está formado de 2 bytes, bajo y alto,aunque sólo se utiliza el byte bajo.
Ejemplo - Indice:El primer código de error (índice [1]) en el parámetro615 Código de error se debe leer.PKE = 1267 Hex (leer parámetro 615 Código de er-ror.)IND = 0001 Hex - Indice nº 1.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 115
Pro
gra
mac
ión

VLT® Serie 2800
El convertidor de frecuencia responderá en el bloquede valor de parámetro (PWE) con un valor de códigode fallo de 1 a 99. Consulte Resumen de adverten-cias y alarmas para identificar el código de fallo.
Valor de parámetro (PWE)
El bloque de valor de parámetro consiste en 2 códi-gos (4 bytes) y el valor depende del comandodefinido (AK). Si el master solicita un valor deparámetro, el bloque PWE no contendrá un valor.Si se desea que el master cambie un valor deparámetro (escritura), el nuevo valor se escribirá enel bloque PWE y se enviará al esclavo.Si el esclavo responde a una solicitud de parámetro(comando de lectura), el valor de parámetro actualen el bloque PWE se transfiere y devuelve al master.Si un parámetro no contiene un valor numéricoaunque sí varias opciones de datos, por ejemplo, elparámetro 001 Idioma en que [0] corresponde a In-glés, y [3] corresponde a Danés, el valor de dato seseleccionará escribiéndolo en el bloque PWE. Con-sulte Ejemplo - Selección de un valor de dato.
Mediante la comunicación serie, sólo es posible leerparámetros que tienen el tipo de dato 9 (cadena detexto). Los parámetros 621 - 635 Placa de carac-terísticas son un tipo de dato 9. Por ejemplo, en elparámetro 621 Tipo de convertidor se puede leer eltamaño de la unidad y su rango de tensión de red.Cuando se transfiere una cadena de texto (lectura)la longitud del telegrama varía, ya que el texto puedetener distinta longitud. La longitud del telegrama sedefine en el segundo byte, denominado LGE.Para que se pueda leer un texto mediante el bloquePWE, el comando de parámetro (CG) debe ajus-tarse en ’F’ Hex.
El carácter de índice se utiliza para indicar si setrata de un comando de lectura o de escritura.En el comando de lectura el índice debe tener elsiguiente formato:
Algunos convertidores de frecuencia tienen parámet-ros en los que se puede escribir texto. Para que sepueda escribir texto mediante el bloque PWE, el co-mando de parámetro (AK) debe estar ajustado en ’F’Hex.En un comando de escritura, el texto debe tener elsiguiente formato:
Tipos de datos admitidos por el convertidor de fre-cuencia:
Tipos dedatos
Descripción
3 Entero 164 Entero 325 Sin signo 86 Sin signo 167 Sin signo 329 Cadena de texto
Sin signo significa que el telegrama no tiene ningúnsigno de operación.
Ejemplo - Escritura de un valor de parámetro:Parámetro 202 Frecuencia máxima, fMAX debecambiar a 100 Hz. Este valor se debe recuperar de-spués de un fallo de alimentación de red, por lo quese escribe en EEPROM.
PKE = E0CA Hex - Escritura del parámetro 202Frecuencia máxima, fMAX
IND = 0000 HexPWE HIGH = 0000 HexPWELOW = 03E8 Hex - Valor de dato 1000, corre-spondiente a 100 Hz, consulte la conversión.
MG.28.E5.05 - VLT es una marca registrada de Danfoss116

VLT® Serie 2800
La respuesta del esclavo al master será la siguiente:
Ejemplo - Selección de un valor de dato:Se desea seleccionar kg/hora [20] en el parámetro416 Unidad de proceso. Este valor se debe recu-perar después de un fallo de alimentación de red,por lo que se escribe en EEPROM.
PKE = E19F Hex - Escritura del parámetro 416Unidad de procesoIND = 0000 HexPWE HIGH = 0000 HexPWELOW = 0014 Hex - seleccionar la opción dedato kg/hour [20]
La respuesta del esclavo al master será la siguiente:
Ejemplo - Lectura de un valor de parámetro:El valor del parámetro 207 Tiempo de rampa deaceleración 1 debe recuperarse.El master envía la siguiente petición:
PKE = 10CF Hex - leer el parámetro 207 Tiempode rampa de aceleración 1IND = 0000 HexPWEHIGH = 0000 HexPWELOW = 0000 Hex
Si el valor del parámetro 207 Tiempo de rampa deaceleración 1 es 10 seg, la respuesta del esclavo almaster será la siguiente:
Conversión:En la sección titulada Ajustes de fábrica se mues-tran los distintos atributos de cada parámetro. Comoun valor de parámetro sólo se puede transferir comoun número entero, es necesario utilizar un factor deconversión para transferir los decimales.
Ejemplo:El parámetro 201 Frecuencia mínima fMIN tiene unfactor de conversión 0,1. Si desea preajustar la fre-cuencia mínima en 10 Hz, debe transferirse el valor100, ya que el factor de conversión de 0,1 significaque el valor transferido se multiplica por 0,1. Por lotanto, el valor 100 se considerará como 10,0.
Tabla de conversiónIndice de
conversiónFactor de
conversión73 0,12 1001 100 1-1 0,1-2 0,01-3 0,001-4 0,0001-5 0,00001
■ Códigos de procesoEl bloque de códigos de proceso se divide en dosbloques de 16 bits, que siempre se suceden en lasecuencia definida.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 117
Pro
gra
mac
ión

VLT® Serie 2800
PCD 1 PCD 2Telegrama decontrol(mas-ter⇒ esclavo)
Código decontrol
Valor dereferencia
Telegrama decontrol(es-clavo⇒ master)
Código deestado
Frecuen. sal-ida
actual
■ Códigos de controlsegún el protocolo FCPara seleccionar Protocolo FC para el código decontrol, el parámetro 512 Tipo de telegrama debeajustarse en Protocolo FC [1].
El código de control se utiliza para enviar comandosde un master (p. ej., un PC) a un esclavo (conver-tidor de frecuencia)
Bit Bit = 0 Bit =100 Ref. interna lsb01 Ref. interna msb02 Frenado de CC03 Parada de inercia04 Parada rápida05 Mantener frec. sal-
ida.06 Parada de rampa Arranque07 Reset08 Vel. fija09 Rampa 1 Rampa 210 Dato no válido Dato válido11 Sin función12 Sin funcion13 Seleccionar Ajuste,
lsb14 Seleccionar Ajuste,
msb15 Cambio sentido
Bit 00/01:El Bit 00/01 se utiliza para elegir entre las dos refer-encias preprogramadas (parámetros 215-218Referencia interna) de acuerdo con la siguientetabla:
Ref. in-terna
Parámetro Bit 01 Bit 00
1 215 0 02 216 0 13 217 1 04 218 1 1
MG.28.E5.05 - VLT es una marca registrada de Danfoss118

VLT® Serie 2800
¡NOTA!:En el parámetro 508 Selección de referenciainterna se define la manera en que el Bit 00/
01 se direcciona según la función correspondienteen las entradas digitales.
Bit 02, Freno de CC:El Bit 02 = ’0’ produce el frenado de CC y la parada.La tensión y duración del freno se preajustan en losparámetros 132 Tensión de freno de CC y 126Tiempo de frenado de CC. Nota: En el parámetro504 Freno de CC se elige la manera en que el Bit02 se direcciona con la correspondiente función enuna entrada digital.
Bit 03, Parada de inercia:El Bit 03 = ’0’ hace que el convertidor de frecuencia"suelte" el motor inmediatamente (los transistores depotencia se "desconectan"), por lo que éste marchapor inercia hasta pararse.El Bit 03 = ’1’ lleva a que el convertidor arranque elmotor si se cumplen las demás condiciones de ar-ranque. Nota: En el parámetro 502 Parada porinercia se elige la manera en que el Bit 03 se direc-ciona con la correspondiente función en una entradadigital.
Bit 04, Parada rápida:El Bit 04 = ’0’ causa una parada en que la velocidaddel motor se reduce mediante el parámetro 212Tiempo rampa deceler. paro rápido.
Bit 05, Mantener frecuencia de salida:El Bit 05 = ’0’ hace que se mantenga la frecuenciade saldia actual (en Hz). La frecuencia de salidamantenida sólo puede cambiarse ahora por mediode las entradas digitales programadas en Acel-eración y Deceleración.
¡NOTA!:Si está activada Mantener salida, elconvertidor de frecuencia no se puede parar
mediante el Bit 06 Arranque ni con una entrada digi-tal. El convertidor de frecuencia sólo se podrá pararpor medio de lo siguiente:• Bit 03 Parada por inercia• Bit 02 Frenado de CC• Entrada digital programada en Frenado de CC,
Parada de inercia o Reset y parada de inercia.
Bit 06, Parada de rampa/arranque:El Bit 06 = ’0’ produce una parada en que la veloci-dad del motor decelera hasta que éste se detienemediante el parámetro seleccionado de rampa dedeceleración.
El Bit 06 = ’1’ produce que el convertidor de frecuen-cia arranque el motor si las demás condiciones dearranque se han cumplido. Nota: En el parámetro505 Arranque se elige la manera de definir cómo elBit 06 Parada de rampa/arranque se direcciona conla correspondiente función en una entrada digital.
Bit 07, Reset:El Bit 07 = ’0’ no causa la reinicialización.El Bit 07 = ’1’ causa la reinicialización de una de-sconexión. Reset se activa en el frente de la señal,es decir, cuando cambia de ’0’ lógico a ’1’ lógico.
Bit 08, Velocidad fija:El Bit 08 = ’1’ produce que la frecuencia de salida sedetermine en el parámetro 213 Frecuen. de vel. fija.
Bit 09, Selección de rampa 1/2:Bit 09 = “0" significa que está activada la rampa 1(parámetros 207/208). Bit 09 = “1" significa que estáactivada la rampa 2 (parámetros 209/210).
Bit 10, Datos no válidos/Datos válidos:Se utiliza para comunicar al convertidor de frecuen-cia si debe utilizar o ignorar el código de control. ElBit 10 = ’0’ causa que se ignore el código de control,y el Bit 10 = ’1’ causa que se utilice. Esta función esimportante, ya que el código de control siempre estácontenido en el telegrama, con independencia deltipo de telegrama utilizado, y es posible, por ejem-plo, desactivarlo si no se desea utilizar en relacióncon la actualización o lectura de parámetros.
Bit 11, Sin función:El Bit 11 no tiene función.
Bit 12, Sin función:El Bit 12 no tiene función.
Bit 13/14, Selección de Ajuste:Los Bits 13 y 14 se utilizan para elegir entre los cua-tro Ajustes de menú, según la siguiente tabla:
Ajuste Bit 14 Bit 131 0 02 0 13 1 04 1 1
Esta función sólo es posible si se ha seleccionadoAjuste múltiple en el parámetro 004 Activar ajuste.Nota: En el parámetro 507 Selección de ajuste sedefine la manera en que el Bit 13/14 se direccionacon la correspondiente función de las entradas digi-tales.
Bit 15, Cambio de sentido:
MG.28.E5.05 - VLT es una marca registrada de Danfoss 119
Pro
gra
mac
ión

VLT® Serie 2800
El Bit 15 = ’0’ causa que no haya inversión del sen-tido de giro.El Bit 15 = ’1’ causa que haya inversión.Nota: La inversión del sentido de giro se ajusta defábrica en Digital en el parámetro 506 Sentido degiro. El Bit 15 sólo causa la inversión cuando se haseleccionado Comunicación serie, O lógico o Ylógico.
■ Códigos de estado según el protocolo FC
El código de estado se utiliza para comunicar almaster (p. ej., un PC) el modo del esclavo (conver-tidor de frecuencia). Esclavo ⇒ Master.
Bit Bit = 0 Bit =100 Control preparado01 Convertidor
preparado02 Parada de inercia03 Sin desconexión Desconexión04 Sin uso05 Sin uso06 Sin uso07 Sin advertencia Advertencia08 Veloc. ≠ ref. Veloc. = ref.09 Control local Comunic. serie.10 Fuera
del rango frecuenciaLímite frecuencia
OK11 Motor en fun-
cionamiento1213 Advert. tensión14 Límite de intensidad15 Advert. térmica
Bit 00, Control preparado:Bit 00 = ’1’. El convertidor de frecuencia está listopara funcionar.Bit 00 = ’0’. El convertidor de frecuencia no estálisto para funcionar.
Bit 01, Convertidor preparado:Bit 01 = ’1’. El convertidor de frecuencia está listopara funcionar, pero hay un comando de parada porinercia activado mediante las entradas digitales o lacomunicación serie.
Bit 02, Parada de inercia:Bit 02 = ’0’. El convertidor de frecuencia ha soltadoel motor.Bit 02 = ’1’. El convertidor de frecuencia puedearrancar el motor cuando se active una orden de ar-ranque.
Bit 03, Sin desconexión/desconexión:
MG.28.E5.05 - VLT es una marca registrada de Danfoss120

VLT® Serie 2800
El Bit 03 = ’0’ significa que el convertidor de fre-cuencia no está en un modo de fallo.El Bit 03 = ’1’ significa que el convertidor de fre-cuencia se ha desconectado y necesita una señalde reset para que se restablezca el funcionamiento.
Bit 04, Sin uso:El Bit 04 no se utiliza en el código de estado.
Bit 05, Sin uso:El Bit 05 no se utiliza en el código de estado.
Bit 06, Sin uso:El Bit 06 no se utiliza en el código de estado.
Bit 07, Sin advertencia/advertencia:El Bit 07 = ’0’ significa que no hay advertencias.Bit 07 = ’1’ significa que ha ocurrido una advertencia.
Bit 08, Velocidad ≠ ref./veloc. = ref.:El Bit 08 = ’0’ significa que el motor está funcio-nando pero la velocidad actual es distinta a lareferencia interna de velocidad. Por ejemplo, estopuede ocurrir mientras la velocidad se acelera o de-celera durante el arranque/parada.El Bit 08 = ’1’ significa que la velocidad actual delmotor es la misma que la referencia de velocidadpreajustada.
Bit 09, Control local/control de comunicación serie:El Bit 09 = ’0’ significa que la tecla [STOP/RESET]se ha activado en el panel de control, o que Controllocal en el parámetro 002 Control local/remoto es laopción seleccionada. No es posible controlar el con-vertidor de frecuencia mediante la comunicaciónserie.El Bit 09 = ’1’ significa que es posible controlar elconvertidor de frecuencia mediante la comunicaciónserie.
Bit 10, Fuera de rango de frecuencia:El Bit 10 = ’0’ si la frecuencia de salida ha llegado alvalor en el parámetro 201 Frecuencia mínima o enel parámetro 202 Frecuencia máxima. El Bit 10 = "1"significa que la frecuencia de salida está en loslímites definidos.
Bit 11, Funcionamiento sí/no:El Bit 11 = ’0’ significa que el motor no está en fun-cionamiento.El Bit 11 = ’1’ significa que el convertidor tiene unaseñal de arranque o que la frecuencia de salida esmayor de 0 Hz.
Bit 13, Advertencia de tensión alta/baja:El Bit 13 = ’0’ significa que no hay advertencias detensión.
El Bit 13 = ’1’ significa que la tensión de CC en elcircuito intermedio del convertidor es demasiadobaja o alta.
Bit 14, Límite de intensidad:El Bit 14 = ’0’ significa que la intensidad de salida esmenor que el valor del parámetro 221 Límite de in-tensidad ILIM.El Bit 14 = ’1’ significa que la intensidad de salida esmayor que el valor del parámetro 221 Límite de in-tensidad ILIM y que el convertidor se desconectarádespués de un tiempo ajustado.
Bit 15, Advertencia térmica:El Bit 15 = ’0’ significa que no hay una advertenciatérmica.El Bit 15 = ’1’ significa que el límite de temperaturase ha sobrepasado en el motor, el convertidor defrecuencia o en un termistor que está conectado auna entrada digital.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 121
Pro
gra
mac
ión
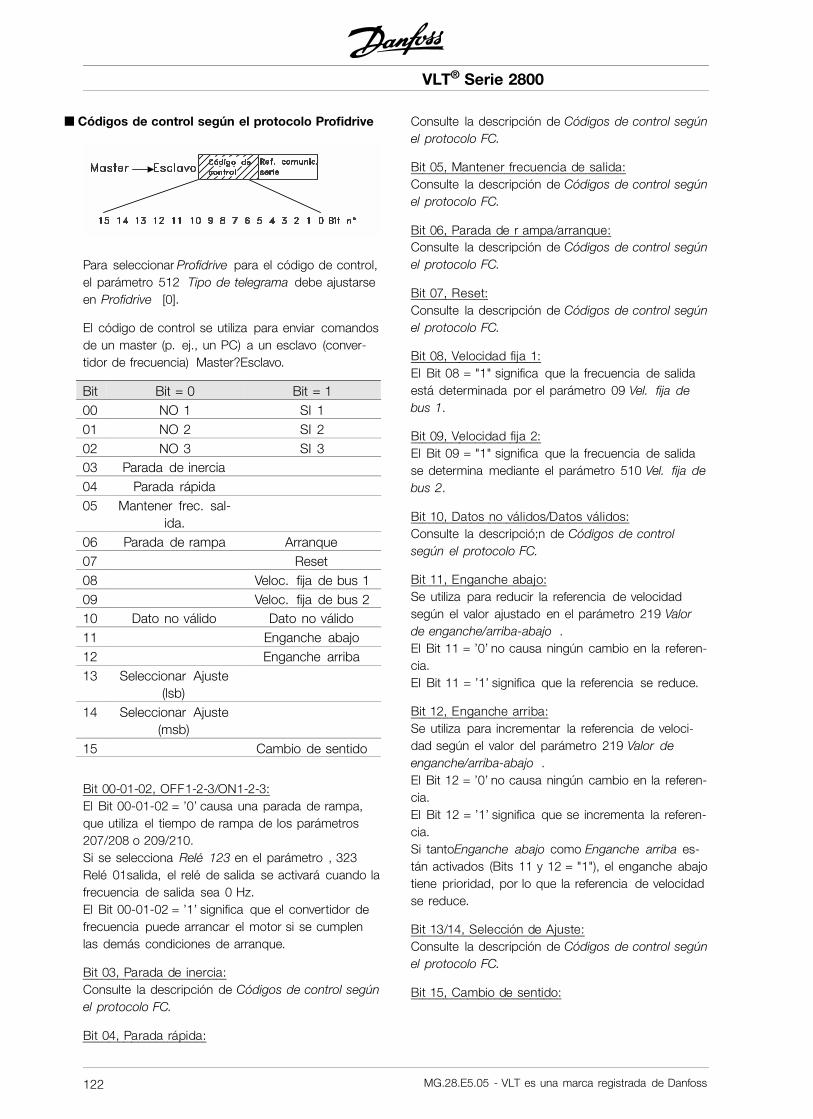
VLT® Serie 2800
■ Códigos de control según el protocolo Profidrive
Para seleccionar Profidrive para el código de control,el parámetro 512 Tipo de telegrama debe ajustarseen Profidrive [0].
El código de control se utiliza para enviar comandosde un master (p. ej., un PC) a un esclavo (conver-tidor de frecuencia) Master?Esclavo.
Bit Bit = 0 Bit = 100 NO 1 SI 101 NO 2 SI 202 NO 3 SI 303 Parada de inercia04 Parada rápida05 Mantener frec. sal-
ida.06 Parada de rampa Arranque07 Reset08 Veloc. fija de bus 109 Veloc. fija de bus 210 Dato no válido Dato no válido11 Enganche abajo12 Enganche arriba13 Seleccionar Ajuste
(lsb)14 Seleccionar Ajuste
(msb)15 Cambio de sentido
Bit 00-01-02, OFF1-2-3/ON1-2-3:El Bit 00-01-02 = ’0’ causa una parada de rampa,que utiliza el tiempo de rampa de los parámetros207/208 o 209/210.Si se selecciona Relé 123 en el parámetro , 323Relé 01salida, el relé de salida se activará cuando lafrecuencia de salida sea 0 Hz.El Bit 00-01-02 = ’1’ significa que el convertidor defrecuencia puede arrancar el motor si se cumplenlas demás condiciones de arranque.
Bit 03, Parada de inercia:Consulte la descripción de Códigos de control segúnel protocolo FC.
Bit 04, Parada rápida:
Consulte la descripción de Códigos de control segúnel protocolo FC.
Bit 05, Mantener frecuencia de salida:Consulte la descripción de Códigos de control segúnel protocolo FC.
Bit 06, Parada de r ampa/arranque:Consulte la descripción de Códigos de control segúnel protocolo FC.
Bit 07, Reset:Consulte la descripción de Códigos de control segúnel protocolo FC.
Bit 08, Velocidad fija 1:El Bit 08 = "1" significa que la frecuencia de salidaestá determinada por el parámetro 09 Vel. fija debus 1.
Bit 09, Velocidad fija 2:El Bit 09 = "1" significa que la frecuencia de salidase determina mediante el parámetro 510 Vel. fija debus 2.
Bit 10, Datos no válidos/Datos válidos:Consulte la descripció;n de Códigos de controlsegún el protocolo FC.
Bit 11, Enganche abajo:Se utiliza para reducir la referencia de velocidadsegún el valor ajustado en el parámetro 219 Valorde enganche/arriba-abajo .El Bit 11 = ’0’ no causa ningún cambio en la referen-cia.El Bit 11 = ’1’ significa que la referencia se reduce.
Bit 12, Enganche arriba:Se utiliza para incrementar la referencia de veloci-dad según el valor del parámetro 219 Valor deenganche/arriba-abajo .El Bit 12 = ’0’ no causa ningún cambio en la referen-cia.El Bit 12 = ’1’ significa que se incrementa la referen-cia.Si tantoEnganche abajo como Enganche arriba es-tán activados (Bits 11 y 12 = "1"), el enganche abajotiene prioridad, por lo que la referencia de velocidadse reduce.
Bit 13/14, Selección de Ajuste:Consulte la descripción de Códigos de control segúnel protocolo FC.
Bit 15, Cambio de sentido:
MG.28.E5.05 - VLT es una marca registrada de Danfoss122

VLT® Serie 2800
Consulte la descripción de Códigos de control segúnel protocolo FC.
■ Códigos de estado según el protocolo Profidrive
El código de estado se utiliza para comunicar almaster (p. ej., un PC) el modo del esclavo (conver-tidor de frecuencia). Esclavo?Master.
Bit Bit = 0 Bit = 100 Unidad preparada01 Unidad preparada02 Parada de inercia03 Sin desconexión Bloqueo04 SI 2 NO 205 SI 3 NO 306 Arranque activado Arranque desacti-
vado07 Advertencia08 Velocidad ? ref. Veloc. = ref.09 Modo ref. local Comunic. serie.10 Fuera
del rango frecuenciaLímite frecuencia
OK11 Motor en fun-
cionamiento1213 Advert. tensión14 Límite de intensidad15 Advert. térmica
Bit 00, Control preparado/no preparado:El Bit 00 = ’0’ significa que los Bits 00, 01 or 02 delcódigo de control son ’0’ (NO1, NO2 o NO3) y queel convertidor no está listo para funcionar.El Bit 00 = ’1’ significa que el convertidor de fre-cuencia está preparado para el funcionamiento.
Bit 01, Convertidor preparado:Consulte la descripción de Códigos de estado segúnel protocolo FC.
Bit 02, Parada de inercia:El Bit 02 = ’0’ significa que los Bits 00, 02 o 03 delcódigo de control son "0" (NO1, NO3 o parada deinercia).El Bit 02 = ’1’ significa que los Bits 00, 01, 02 y 03en el código de control son "1", y que el convertidorde frecuencia no se ha desconectado.
Bit 03, Sin desconexión/desconexión:
MG.28.E5.05 - VLT es una marca registrada de Danfoss 123
Pro
gra
mac
ión

VLT® Serie 2800
Consulte la descripción de Códigos de estado segúnel protocolo FC.
Bit 04, SI 2/NO 2:El Bit 04 = ’0’ significa que el Bit 01 en el código decontrol = ’1’.El Bit 04 = ’1’ significa que el Bit 01 en el código decontrol = ’0’.
Bit 05, SI 3/NO 3:El Bit 05 = ’0’ significa que el Bit 02 en el código decontrol = ’1’.El Bit 05 = ’1’ significa que el Bit 02 en el código decontrol = ’0’.
Bit 06, Arranque activado/desactivado:Bit 06 = ’1’ después del reset de una desconexión,después de activarse NO2 o NO3 o después de laconexión de la tensión de alimentación. Arranquedesactivado se inicializa ajustando el Bit 00 delcódigo de control en ’0’, y los Bits 01, 02 y 10 seajustan en ’1’.
Bit 07, Advertencia:Consulte la descripción de Códigos de estado segúnel protocolo FC.
Bit 08, Velocidad:Consulte la descripción de Códigos de estado segúnel protocolo FC.
Bit 09, Sin advertencia/advertencia:Consulte la descripción de Códigos de estado segúnel protocolo FC.
Bit 10, Velocidad ? ref./veloc. = ref.:Consulte la descripción de Códigos de estado segúnel protocolo FC.
Bit 11, Funcionamiento sí/no:Consulte la descripción de Códigos de estado segúnel protocolo FC.
Bit 13, Advertencia de tensión alta/baja:Consulte la descripción de Códigos de estado segúnel protocolo FC.
Bit 14, Límite de intensidad:Consulte la descripción de Códigos de estado segúnel protocolo FC.
Bit 15, Advertencia térmica:Consulte la descripción de Códigos de estado segúnel protocolo FC.
■ Referencia de comunicación serie
La referencia de comunicación serie se transfiere alconvertidor de frecuencia como un código de 16bits. El valor se transfiere en números enteros 0 -±32767 (±200%).16384 (4000 Hex) corresponde a 100%.
La referencia de comunicación serie tiene el sigu-iente formato: 0-16384 (4000 Hex) �= 0-100% (Par.204 Referencia mín. - Par. 205 Referencia máx.)
Es posible cambiar el sentido de giro mediante lareferencia de comunicación serie. Esto se hace con-virtiendo el valor binario de referencia en un valorcomplementario de 2. Consulte el ejemplo.
Ejemplo - Código de control y ref. de comunicaciónserie:El convertidor de frecuencia debe recibir un co-mando de arranque y la referencia se debe ajustaren el 50% (2000 Hex) del rango de referencia.Código de control = 047F Hex ⇒ Comando de ar-ranque.Referencia = 2000 Hex ⇒ 50% de la referencia.
El convertidor de frecuencia debe recibir un co-mando de arranque y la referencia se debe ajustaren el -50% (-2000 Hex) del rango de referencia.El valor de referencia primero se convierte a uncomplementario de 1, y después con una suma bi-naria de 1 se obtiene el complementario de 2:
2000 Hex 0010 0000 0000 0000 0000complementariode 1
1101 1111 1111 1111 1111
+ 1complementariode 2
1110 0000 0000 0000 0000
MG.28.E5.05 - VLT es una marca registrada de Danfoss124

VLT® Serie 2800
Código de control = 047F Hex ⇒ Comando de ar-ranque.Referencia = E000 Hex ⇒ -50% de la referencia.
■ Frecuencia de salida actual
El valor de la frecuencia de salida actual del conver-tidor de frecuencia se transfiere en forma de uncódigo de 16 bits. El valor se transfiere en forma denúmeros enteros 0 - ±32767 (±200%).16384 (4000 Hex) corresponde al 100%.
La frecuencia de salida tiene el siguiente formato:0-16384 (4000 Hex) �= 0-100% (Par. 201 Frecuenciamínima - Par. 202 Frecuencia máxima).
Ejemplo - Código de estado y frecuencia de salida:El master recibe un mensaje de estado del conver-tidor de frecuencia indicando que la frecuencia desalida de intensidad es el 50% del rango de frecuen-cia de salida.Par. 201 Frecuencia mínima = 0 HzPar. 202 Frecuencia máxima = 50 Hz
Código de estado = 0F03 Hex.Frecuencia de salida = 2000 Hex ⇒ 50% del rangode frecuencia, que corresponde a 25 Hz.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 125
Pro
gra
mac
ión

VLT® Serie 2800
■ Comunicación serie
500500 Dirección
(DIRECCION)Valor:
0 - 126 ✭ 1
Función:Este parámetro permite asignar una dirección enuna red de comunicación serie a cada convertidorde frecuencia.
Descripción de opciones:Cada convertidor de frecuencia debe recibir una di-rección distinta.Si el número de unidades conectadas (convertidoresde frecuencia + master) es mayor de 31, es nece-sario utilizar un repetidor.El parámetro 500 Dirección no se puede seleccionarmediante la comunicación serie, sino que debe ajus-tarse en el panel de control.
501501 Velocidad en baudios
(BAUDIOS)
Valor:300 baudios (300 BAUD) [0]600 baudios (600 BAUD) [1]1200 baudios (1200 BAUD) [2]2400 baudios (2400 BAUD) [3]4800 baudios (4800 BAUD) [4]
✭ 9600 baudios (9600 BAUD) [5]
Función:Este parámetro sirve para programar la velocidad aque se transmiten los datos mediante el puerto se-rie. La velocidad en baudios se define como elnúmero de bits transmitidos por segundo.
Descripción de opciones:La velocidad de transmisión del convertidor defrecuencia se debe ajustar en un valor que corre-sponda a la velocidad de transmisión del master.El parámetro 501 Velocidad en baudios no se puedeseleccionar mediante el puerto serie, sino que debepreajustarse con la unidad en funcionamiento.
502502 Parada por inercia(PARADA INERCIA)
Valor:Entrada digital (DIGIT AL) [0]Puerto serie (BUS) [1]Y lógico (DIGIT AL Y BUS) [2]
✭ O lógico (DIGIT AL O BUS)
[3]
Función:Los parámetros 502-508 permiten elegir si se con-trola el convertidor de frecuencia mediante lasentradas digitales y/o el puerto serie.Si se selecciona Puerto serie [1], el comando corre-spondiente sólo se puede activar si se ha dadomediante el puerto serie.En el caso de Y lógico [2], esta función debe acti-varse, además, mediante una de las entradasdigitales.
Descripción de opciones:La siguiente tabla describe el motor en fun-cionamiento o parado, cuando se selecciona cadauna de las siguientes opciones: Entrada digital [0],Puerto serie [1], Y lógico [2] u O lógico [3].
¡NOTA!:Tome en cuenta que Parada por inercia y elBit 03 en el código de control están activados
en ’0’ lógico.
Entrada digital [0]Ent. digital Puerto serie Función
0 0 Inercia0 1 Inercia1 0 Motor en
funcionamiento1 1 Motor en
funcionamiento
Puerto serie [1]Ent. digital Puerto serie Función
0 0 Inercia0 1 Motor en
funcionamiento1 0 Inercia1 1 Motor en
funcionamiento
Y lógico [2]Ent. digital Puerto serie Función
0 0 Inercia0 1 Motor en fun-
cionamiento1 0 Motor en
funcionamiento1 1 Motor en
funcionamiento
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss126

VLT® Serie 2800
O lógico [3]Ent. digital Puerto serie Función
0 0 Inercia0 1 Inercia1 0 Inercia1 1 Motor en
funcionamiento
503503 Parada rápida
(PARADA RAPIDA)
Valor:Entrada digital (DIGIT AL ) [0]Puerto serie (BUS) [1]Y lógico (DIGIT AL Y BUS) [2]
✭ O lógico (DIGIT AL O BUS) [3]
Función:Consulte la descripción de función del parámetro502 Parada por inercia.
Descripción de opciones:La siguiente tabla describe cuándo el motor está enfuncionamiento y cuándo está en el modo de paradarápida, al seleccionar las siguientes opciones: En-trada digital [0], Puerto serie [1], Y lógico [2] u Ológico [3].
¡NOTA!:Tome en cuenta que Parada rápida inversa yel Bit 04 en el código de control están activa-
dos en ’0’ lógico.
Entrada digital [0]Ent. digital Puerto serie Función
0 0 Parada rápida0 1 Parada rápida1 0 Motor en fun-
cionamiento1 1 Motor en fun-
cionamiento
Puerto serie [1]Ent. digital Puerto serie Función
0 0 Parada rápida0 1 Motor en fun-
cionamiento1 0 Parada rápida1 1 Motor en fun-
cionamiento
Y lógico [2]Ent. digital Puerto serie Función
0 0 Parada rápida0 1 Motor en fun-
cionamiento1 0 Motor en fun-
cionamiento1 1 Motor en fun-
cionamiento
O lógico [3]Ent. digital Puerto serie Función
0 0 Parada rápida0 1 Parada rápida1 0 Parada rápida1 1 Motor en fun-
cionamiento
504504 Freno de CC
(FRENO DE C.C)
Valor:Entrada digital (DIGIT AL ) [0]Puerto serie (BUS) [1]Y lógico (DIGIT AL Y BUS) [2]
✭ O lógico (DIGIT AL O BUS) [3]
Función:Consulte la descripción de función del parámetro502 Parada por inercia.
Descripción de opciones:La siguiente tabla describe cuándo funciona el motory se activa el freno de CC al seleccionar las sigu-ientes opciones: Entrada digital [0], Puerto serie [1],Y lógico [2] u O lógico [3].
¡NOTA!:Tome en cuenta que Freno de CC inverso yel Bit 02 del código de control están activados
en ’0’ lógico.
Entrada digital [0]Ent. digital Puerto serie Función
0 0 Frenado de CC0 1 Frenado de CC1 0 Motor en
funcionamiento1 1 Motor en
funcionamiento
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 127
Pro
gra
mac
ión

VLT® Serie 2800
Puerto serie [1]Ent. digital Puerto serie Función
0 0 Frenado de CC0 1 Motor en
funcionamiento1 0 Frenado de CC1 1 Motor en
funcionamiento
Y lógico [2]Ent. digital Puerto serie Función
0 0 Frenado de CC0 1 Motor en
funcionamiento1 0 Motor en
funcionamiento1 1 Motor en
funcionamiento
O lógico [3]Ent. digital Puerto serie Función
0 0 Frenado de CC0 1 Frenado de CC1 0 Frenado de CC1 1 Motor en
funcionamiento
505505 Arranque(ARRANQUE)
Valor:Entrada digital (DIGIT AL ) [0]Puerto serie (BUS) [1]Y lógico (DIGIT AL Y BUS) [2]
✭ O lógico (DIGIT AL O BUS) [3]
Función:Consulte la descripción de función del parámetro502 Parada por inercia.
Descripción de opciones:La siguiente tabla describe cuándo se ha parado elmotor y cuándo el convertidor tiene un comando dearranque, al seleccionar una de las siguientes op-ciones: Entrada digital [0], Puerto serie [1], Y lógico[2] u O lógico [3].
Entrada digital [0]Ent. digital Puerto serie Función
0 0 Parada0 1 Parada1 0 Arranque1 1 Arranque
Puerto serie [1]Ent. digital Puerto serie Función
0 0 Parada0 1 Arranque1 0 Parada1 1 Arranque
Y lógico [2]Ent. digital Puerto serie Función
0 0 Parada0 1 Parada1 0 Parada1 1 Arranque
O lógico [3]Ent. digital Puerto serie Función
0 0 Parada0 1 Arranque1 0 Arranque1 1 Arranque
506506 Inversión
(SENTIDO)Valor:Entrada digital (DIGIT AL ) [0]Puerto serie (BUS) [1]Y lógico (DIGIT AL Y BUS) [2]
✭ O lógico (DIGIT AL O BUS) [3]
Función:Consulte la descripción de función del parámetro502 Parada por inercia.
Descripción de opciones:La siguiente tabla describe cuándo el motor funcionade izquierda a derecha y viceversa cuando se hanseleccionado las siguientes opciones: Entrada digi-tal [0], Puerto serie [1], Y lógico [2] u O lógico [3].
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss128

VLT® Serie 2800
Entrada digital [0]Ent. digital Puerto serie Función
0 0 Izqda. a dcha.0 1 Izqda. a dcha.1 0 Dcha. a izqda.1 1 Dcha. a izqda.
Puerto serie [1]Ent. digital Puerto serie Función
0 0 Izqda. a dcha.0 1 Dcha. a izqda.1 0 Izqda. a dcha.1 1 Dcha. a izqda.
Y lógico [2]Ent. digital Puerto serie Función
0 0 Izqda. a dcha.0 1 Izqda. a dcha.1 0 Izqda. a dcha.1 1 Dcha. a izqda.
O lógico [3]Ent. digital Puerto serie Función
0 0 Izqda. a dcha.0 1 Dcha. a izqda.1 0 Dcha. a izqda.1 1 Dcha. a izqda.
507507 Selección de ajuste
(AJUSTE)Valor:Entrada digital (DIGIT AL) [0]Comunicación serie (BUS) [1]Y lógico (DIGIT AL Y BUS) [2]
✭ O lógico (DIGIT AL O BUS) [3]
Función:Consulte la descripción de función del parámetro502 Parada por inercia.
Descripción de opciones:La siguiente tabla muestra el Ajuste (parámetro 004Activar ajuste) que se selecciona para las siguientesopciones: Entrada digital [0], Comunicación serie[1], Y lógico [2] y O lógico [3].
Entrada digital [0]Ajuste msb Ajuste lsb Función
0 0 Ajuste 10 1 Ajuste 21 0 Ajuste 31 1 Ajuste 4
Comunicación serie [1]Ajuste msb Ajuste lsb Función
0 0 Ajuste 10 1 Ajuste 21 0 Ajuste 31 1 Ajuste 4
Y lógico [2]Ajuste
busmsb
Ajustebuslsb
Ajustedigit.msb
Ajustedigit.lsb
NºAjuste
0 0 0 0 10 0 0 1 10 0 1 0 10 0 1 1 10 1 0 0 10 1 0 1 20 1 1 0 10 1 1 1 21 0 0 0 11 0 0 1 11 0 1 0 31 0 1 1 31 1 0 0 11 1 0 1 21 1 1 0 31 1 1 1 4
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 129
Pro
gra
mac
ión

VLT® Serie 2800
O lógico [3]Ajuste
busmsb
Ajustebuslsb
Ajustedigit.msb
Ajustedigit.lsb
NºAjuste
0 0 0 0 10 0 0 1 20 0 1 0 30 0 1 1 40 1 0 0 20 1 0 1 20 1 1 0 40 1 1 1 41 0 0 0 31 0 0 1 41 0 1 0 31 0 1 1 41 1 0 0 41 1 0 1 41 1 1 0 41 1 1 1 4
508508 Selección de referencia interna(SEL. REF. INTERN)
Valor:Entrada digital (DIGIT AL) [0]Comunicación serie (BUS) [1]Y lógico (DIGIT AL Y BUS) [2]
✭ O lógico (DIGIT AL O BUS) [3]
Función:Consulte la descripción de función del parámetro502 Parada por inercia.
Descripción de opciones:Las referencias internas mediante la comunicaciónserie están activadas cuando el parámetro 512 Tipode telegrama se ajusta en Protocolo FC [1].
509509 Veloc. fija de bus 1 (BUS JOG 1)
510510 Veloc. fija de bus 2 (BUS JOG 2)
Valor:0,0 - par. 202 Frecuencia máxima
✭ 10,0 Hz
Función:Si el parámetro 512 Indicar telegrama muestra laselección Profidrive [0], se pueden elegir dos veloci-dades fijas (Jog 1 o Jog 2) mediante el puerto serie.La función es la misma que la del parámetro 213Frec. de veloc. fija.
Descripción de opciones:La frecuencia de veloc. fija fJOG se puede elegir en-tre 0 Hz y fMAX.
512512 Indicar telegrama
(TIPO TELEGRAMA)
Valor:Profidrive (PROFIDRIVE) [0]
✭ FC protocol (FC PROTOCOL) [1]
Función:Es posible elegir entre dos perfiles distintos decódigo de control.
Descripción de opciones:Seleccione el perfil de código de control que desee.Consulte Puerto serie del VLT 2800 para más infor-mación sobre estos perfiles de código de control.
513513 Intervalo tiempo de bus
(RETARDO BUS)Valor:
1 - 99 seg ✭ 1 seg
Función:En este parámetro, se puede preajustar el tiempomáximo que debe transcurrir entre la recepción dedos telegramas consecutivos. Si se sobrepasa estetiempo, se presupone que se ha detenido la comuni-cación serie y se produce la acción que se hayaajustado en el parámetro 514 Función intervalo detiempo bus.
Descripción de opciones:Preajuste el tiempo requerido.
514514 Función de interv. tiempo bus
(FUNC.RETARDO BUS)
Valor:✭ No (NO) [0]
Mantener frec. salida (MANTENER SALIDA) [1]Parada (PARO) [ 2]Velocidad fija (VELOCIDAD FIJA) [3]Veloc. máxima (MAXIMA VELOCIDAD) [4]Parada y desconexión (PARO Y DESCONEXION)[5]
Función:En este parámetro se selecciona la reacción de-seada del convertidor de frecuencia cuando eltiempo ajustado en el parámetro 513 Intervalo
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss130

VLT® Serie 2800
tiempo de bus se ha sobrepasado. Si las opciones[1] a [5] se activan, se desactivará la salida de relé.
Descripción de opciones:La frecuencia de salida del convertidor sirve paramantener el valor actual, parar el motor, mantenerse
en el parámetro 213 Frecuencia de velocidad fija,mantenerse en el parámetro 202 Frecuencia máx-ima fMAX o para parar y activar una desconexión.
515-544 Lectura de datosValor:Nºpar.
Descripción Texto de display Unidad Intervaloactualiz.
515 Referencia (REFERENCIA) %516 Referencia [Unidad] (REFERENCIA [UNID]) Hz, rpm517 Realimentación [Unidad] (REALIMENT ACION) Par. 416518 Frecuencia (FRECUENCIA) Hz519 Frecuencia x escalado (FREC. X ESCALA) Hz520 Intensidad del motor (INTENSIDAD MOTOR) Amp521 Par (PAR) %522 Potencia [kW] (POTENCIA (kW)) kW523 Potencia [HP] (POTENCIA (HP)) HP524 Tensión del motor (TENSION MOTOR) V525 Tensión de enlace (TENSION C.C) V526 Carga térmica del motor (TERMICO MOTOR) %527 Carga térmica del inversor (TERMICO INV.) %528 Entrada digital (ENTRADA DIGITAL) Bin529 Term. 53, entrada analóg. (ENTR. ANALOG 53) V531 Term. 60, entrada analógica (ENTR. ANALOG 60) mA532 Referencia de pulsos (REF . PULSOS) Hz533 Referencia externa (REF . EXT.) %534 Código de estado, Hex (COD.EST ADO) Hex537 Temperatura del inversor (TEMP. INV.) �C538 Código de alarma (COD.ALARMA) Hex539 Código de control (COD.CONTROL) Hex540 Código de aviso (CODIGO AVISO) Hex541 Código de estado ampliado (COD.EST ADO) Hex544 Contador de pulsos (CONT. PULSOS)
Función:Estos parámetros se pueden leer mediante el puertode comunicación serie y el display del LCP. Consulteademás los parámetros 009-012 Lectura del display.
¡NOTA!:Los parámetros 515-541 sólo se puedenleer mediante el panel de control LCP.
Descripción de opciones:Referencia resultante %, parámetro 515:
Da la referencia de resultado como porcentaje en elrango entre Referencia mínima, Ref MIN y Referencia
máxima, RefMAX. Consulte ademásUtilización de ref-erencias.
Referencia de resultado [unidad], parámetro 516:Da la referencia de resultado en Hz en modo delazo abierto (parámetro 100). En el modo de lazocerrado, la unidad de referencia se selecciona en elparámetro 416 Unidades de proceso.
Realimentación [unidad], parámetro 517:Da el valor de realimentación de resultado con launidad/escala que se seleccione en los parámetros414, 415 y 416. Consulte además Utilización de re-alimentación.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 131
Pro
gra
mac
ión

VLT® Serie 2800
Frecuencia [Hz], parámetro 518:Da la frecuencia de salida del convertidor de fre-cuencia.
Frecuencia x escalado [-], parámetro 519:corresponde a la frecuencia de salida actual fM mul-tiplicado por el factor ajustado en el parámetro 008Mostrar escala de frecuencia de salida .
Intensidad del motor [A], parámetro 520:Da la intensidad de fase del motor medida comovalor efectivo.
Par [Nm], parámetro 521:Da la carga actual del motor en relación con el parnominal del mismo.
Potencia [kW], parámetro 522:Da la potencia actual absorbida por el motor en kW.
Potencia [HP], parámetro 523:Da la potencia actual absorbida por el motor en HP.
Tensión del motor, parámetro 524:Da la tensión suministrada por el motor.
Tensión de enlace CC, parámetro 525:Da la tensión del circuito intermedio en el conver-tidor de frecuencia.
Carga térmica del motor [%], parámetro 526:Da la carga térmica calculada del motor. 100% es ellímite de desconexión. Consulte además elparámetro 128 Protección térmica del motor.
Carga térmica del inversor [%], parámetro 527:Da la carga térmica calculada del convertidor de fre-cuencia. 100% es el límite de desconexión.
Entrada digital, parámetro 528:Da el estado de señal de las 5 entradas digitales(18, 19, 27, 29 y 33). La entrada 18 corresponde albit del extremo izquierdo. ’0’ = sin señal, ’1’ = señalconectada.
Terminal 53, entrada analógica [V], parámetro 529:Da el valor de tensión de la señal en el terminal 53.
Terminal 60, entrada analógica [mA], parámetro 531:Da el valor actual de la señal en el terminal 60.
Referencia de pulso [Hz], parámetro 532:Da una frecuencia de pulsos en Hz conectada al ter-minal 33.
Referencia externa, parámetro 533:Indica la suma de las referencias externas como unporcentaje (suma de analógica/pulsos/comunicación
serie) en el rango entre Referencia mínima, RefMIN yReferencia máxima, RefMAX .
Código de estado, parámetro 534:Da el código de estado actual del convertidor de fre-cuencia en hexadecimal. Consulte Comunicaciónserie del VLT 2800.
Temperatura del inversor, parámetro 537:Da la temperatura del inversor en el convertidor defrecuencia. El límite de desconexión es 90-100 �C, yel límite de conexión es 70 ± 5 �C.
Código de aviso, parámetro 538:Indica en código hexadecimal la alarma del conver-tidor de frecuencia. Consulte Código de aviso,código de estado ampliado y código de alarma.
Código de control, parámetro 539:Da el código de control actual del convertidor enhexadecimal. Consulte Comunicación serie del VLT2800.
Código de aviso, parámetro 540:Indica en hexadecimal si hay una advertencia en elconvertidor de frecuencia. Consulte Código de aviso,código de estado ampliado y código de alarma.
Código de estado ampliado, parámetro 541:Indica si hay una advertencia en el convertidor defrecuencia en código hexadecimal. Consulte Códigode aviso, código de estado ampliado y código dealarma.
Contador de pulsos, parámetro 544:Este parámetro se puede leer en el display del LCP(009–012). Si se ejecuta el paso de contador, esteparámetro permite con o sin un reset, leer el númerode pulsos registrado por el dispositivo. La frecuenciamás alta es 67,6 kHz y la más baja es 5 Hz. El con-tador se reinicia al reiniciar el paso de contador.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss132

VLT® Serie 2800
■ Funciones técnicas
600-605 Datos de funcionamientoValor:Nº par. Descripción Texto del display Unidad Rango600 Horas de fun-
cionamiento(HORAS OPERAC.) Horas 0-130.000,0
601 Horas ejecutadas (HORAS EJECU-TADAS)
Horas 0-130.000,0
602 Contador de kWh (KWH) kWh Depende de launidad
603 Nº puestas en marcha (NO ARRANQUES) Nº de veces 0-9999604 Nº de sobrecalen-
tamientos(SOBRETEMPERA T.) Nº de veces 0-9999
605 Nº de sobretensiones (SOBRETENSION) Nº de veces 0-9999
Función:Estos parámetros se pueden leer mediante el puertode comunicación serie y el display del LCP.
Descripción de opciones:Parámetro 600, Horas de operación:Indica el número de horas que ha estado en fun-cionamiento el convertidor de frecuencia. El valor seguarda cada hora y cuando hay un fallo de ali-mentación de red. Este valor no puede reiniciarse.
parámetro 601, Horas ejecutadas:Indica el número de horas que ha funcionado el mo-tor desde el último reset del parámetro 619 Resetcontador de horas ejecutadas. El valor se guardacada hora y cuando hay un fallo de alimentación dered.
Parámetro 602, Contador de kWh:Indica la energía de salida del convertidor de fre-cuencia en kWh. El cálculo se basa en el valor dekW promedio de una hora. Este valor se puede ini-cializar en el parámetro 618 Reset del contador dekWh.Rango: 0 - depende de la unidad.
Parámetro 603, Nº puestas en marchaIndica el número de arranques del convertidor real-izados con tensión de alimentación.
Parámetro 604, Nº de sobrecalentamientos:Indica el número de fallos por sobrecalentamientoregistrados en el disipador de calor del convertidor.
Parámetro 605, Nº de sobretensiones:Indica el número de sobretensiones en el circuito in-termedio del convertidor de frecuencia. Sólo se
cuenta cuando la Alarma 7 Sobretensión está acti-vada.
¡NOTA!:Los parámetros 615-617 Registro de fallos nose pueden leer mediante el panel de control
integrado.
615615 Registro de fallos: Código de fallo(FALLO: COD.FALLO)
Valor:[Indice 1 - 10] Código de fallo: 0 - 99
Función:En este parámetro, se puede ver el motivo de unadesconexión (interrupción de alimentación al conver-tidor) que haya ocurrido. Hay definidos 10 [1-10]valores de registro.El número de registro más bajo [1] contiene el valorde dato guardado más reciente. El número de reg-istro más alto [10] contiene el valor de dato másantiguo guardado. Si ocurre una desconexión, esposible ver la causa, la hora y un valor probable dela intensidad de salida o la tensión de salida.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 133
Pro
gra
mac
ión

VLT® Serie 2800
Descripción de opciones:Se indica un código de fallo en que el número hacereferencia a una tabla. Consulte dicha tabla en Men-sajes de advertencia/alarma.
616616 Registro de fallos: Tiempo(FALLO: TIEMPO)
Valor:[Indice 1 - 10] Horas: 0 - 130.000,0
Función:En este parámetro, es posible ver el número total dehoras de funcionamiento en relación con las últimas10 desconexiones.Se indican 10 [1-10] valores de registro. El númerode registro menor [1] contiene el valor de datoguardado más reciente, y el número de registro másalto [10] contiene el valor de dato más antiguo.
Descripción de opciones:Se lee como un solo valor.
617617 Registro de fallos: Valor(FALLO: VALOR)
Valor:[Indice 1 - 10] Valor: 0 - 9999
Función:En este parámetro, se puede ver el valor en que haocurrido una desconexión. La unidad de este valordepende de la alarma que está activada en elparámetro 615 Registro de fallos: Código de fallo.
Descripción de opciones:Se lee como un solo valor.
618618 Reset del contador de kWh(RESET ENERGIA)
Valor:✭ Sin reset (NO) [0]
Reset (RESET CONTADOR) [1]
Función:Inicialización en cero del parámetro 602 Contadorde kWh.
Descripción de opciones:Si se selecciona Reset [1] y se presiona la tecla[OK], el contador de kWh del convertidor de frecuen-cia se inicializa en cero. Este parámetro no sepuede seleccionar mediante la comunicación serie.
¡NOTA!:Cuando se activala tecla [OK], el contador se inicializa en cero.
619619 Reset contador de horas ejecutadas
(RESET HORAS EJEC)
Valor:✭ Sin reset (NO) [0]
Reset (RESET CONTADOR) [1]
Función:Inicialización del parámetro 601 Horas ejecutadas .
Descripción de opciones:Si se selecciona Reset [1] y se presiona la tecla[OK], el parámetro 601 Horas ejecutadas del conver-tidor de frecuencia se inicializa en cero. Esteparámetro no se puede seleccionar mediante la co-municación serie.
¡NOTA!:Cuando se activa latecla [OK] el parámetro se inicializa en cero.
620620 Modo de funcionamiento
(MODO FUNCIONAM.)
Valor:✭ Funcionamiento normal (NORMAL) [ 0]
Prueba de tarjeta de control (PRUEBA DE TAR-JETA DE CONTROL) [2]Inicialización (INICIALIZACION) [3]
Función:
¡NOTA!:Tenga en cuenta que la tarjeta de con-trol será diferente en las unidades DeviceNet/
CANopen. Consulte el manual DeviceNetMG.90.BX.YY para obtener más detalles.
Además de tener el funcionamiento normal, esteparámetro se puede utilizar para probar la tarjeta decontrol.También se pueden inicializar los ajustes de fábricaen los parámetros de todos los Ajustes, a excepciónde los parámetros 500 Dirección, 501 Velocidad enbaudios, 600-605 Datos de funcionamiento y 615-617 Registro de fallos .
Descripción de opciones:Funcionamiento normal [0] se utiliza para el fun-cionamiento normal del motor.
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss134

VLT® Serie 2800
Prueba de tarjeta de control [2] se selecciona si sedesea comprobar las entradas analógicas/digitales,las salidas analógicas/digitales, las salidas de relé ylas tensiones de 10 V y 24 V.La prueba se realiza de la siguiente manera:Se conec tan 27 - 29 - 33 - 46.Se conectan 50 - 53.Se conectan 42 -60.12 - Terminal de relé 01 se conectan.18 - Terminal de relé 02 se conectan.19 - Terminal de relé 03 se conectan.
Utilice el siguiente procedimiento para la prueba dela tarjeta de control:1. Seleccione la prueba de tarjeta de control.2. Desconecte la tensión de red y espere hasta que
la luz en el display se haya apagado.3. Realice el montaje de acuerdo con el dibujo y la
descripción.4. Conecte la tensión de red.5. El convertidor de frecuencia realiza automática-
mente una prueba de la tarjeta de control.
Si el convertidor muestra un código de fallo de 37-45, la prueba ha indicado un error. Cambie la tarjetade contr ol para arrancar el convertidor de frecuen-cia.Si el convertidor empieza en el modo de Display, laprueba ha sido correcta. Retire el conector parapruebas, y el convertidor queda preparado para elfuncionamiento. El parámetro 620 Modo defuncionamiento se ajusta automáticamente en Fun-cionamiento normal [0].
Inicialización [3] se selecciona si se desea utilizar elajuste de fábrica del equipo.Procedimiento de inicialización:1. Seleccione Inicialización [3].2. Desconecte la tensión de red y espere hasta que
la luz en el display se haya apagado.3. Conecte la tensión de red.4. Se inicializan los ajustes de fábrica en los
parámetros de todos los Ajustes, a excepción de
los parámetros 500 Dirección, 501 Velocidad enbaudios, 600-605 Datos de funcionamiento y615-617 Registro de fallos .
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 135
Pro
gra
mac
ión

VLT® Serie 2800
621-642 Placa de 1 setgray característicasValor:Parám.Nº
DescripciónPlaca de características
Texto del display
621 Tipo de convertidor de frecuencia (TIPO UNIDAD)624 Versión de software (VERSIÓN SOFTWARE)625 Nº identific. de LCP (VERSIÓN LCP)626 Nº identif. base de datos (ID. DB)627 Versión partes de potencia (ID. SEC. POT.)628 Tipo de opción de aplicación (OP. AP.)630 Tipo de opción de comunicación (TIPO OP. COMUNIC.)632 Identific. de software BMC (ID SOFTWARE-BMC)634 Identific. de unidades para comunicación (ID UNIDAD)635 Nº de parte de software (Nº PART SW)640 Versión de software (VERSIÓN SOFTWARE)641 Identificación de software BMC (SW BMC2)642 Identific. de tarjeta de alimentación (ID. ALIM.)
Función:Los datos principales del convertidor se pueden leeren los parámetros 621 a 635 Placa de característi-cas mediante el panel de control LCP2 o lacomunicación serie. Los parámetros 640 - 642 tam-bién pueden visualizarse en el display integrado delpanel de control.
Descripción de opciones:Parámetro 621 Placa de características: Tipo con-vertidor:Muestra el tamaño y la tensión de red del conver-tidor.Ejemplo: VLT 2811 380-480 V.
Parámetro 624 Placa de características: Nº versiónde softwareAparece aquí el número de versión de software ac-tual del equipo.Ejemplo: V 1.00
Parámetro 625 Placa de características: Nº ID LCP2:El número de identificación del LCP del equipoaparece aquí.Ejemplo: ID 1.42 2 kB
Parámetro 626 Placa de características: Nº identifi-cación de base de datos:El número de identificación de la base de datos desoftware se muestra aquí.Ejemplo: ID 1.14.
Parámetro 627 Placa de características: Versión deelemento de potencia:
El número de identificación del elemento de poten-cia del equipo se muestra aquí.Ejemplo: ID 1.15.
Parámetro 628 Placa de características: Tipo deaplicación:Aquí pueden visualizarse los tipos de opciones deaplicación que están instalados en el convertidor defrecuencia.
Parámetro 630 Placa de características: Tipo de co-municación:Aquí pueden visualizarse los tipos de opciones decomunicación que están instalados en el convertidorde frecuencia.
Parámetro 632 Placa de características: Identifi-cación de software BMC:El número de identificación del software BMC semuestra aquí.
Parámetro 634 Placa de características: Identifi-cación de convertidor para comunicación:El número de identificación para comunicación semuestra aquí.
Parámetro 635 Placa de características: Nº de sec-ción de software:El número de la sección de software se muestraaquí.
Parámetro 640 Placa de características: Versión desoftware:Aparece aquí el número de versión de software ac-tual del equipo. Ejemplo: 1.00
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss136

VLT® Serie 2800
Parámetro 641 Placa de características: Identifi-cación de software BMC:El número de identificación del software BMC semuestra aquí.
Parámetro 642 Placa de características: Identifi-cación de tarjeta de potencia:Aparece aquí el número de identificación de la sec-ción de potencia del convertidor. Ejemplo: 1.15
✭ = Ajuste de fábrica. () = Texto del display [] = Valor utilizado en comunicaciones mediante el puerto serie.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 137
Pro
gra
mac
ión

VLT® Serie 2800
■ Condiciones especiales
■ Aislamientogalvánico (PELV)El aislamiento PELV (tensión protectora muy baja)se logra insertando aislantes galvánicos entre loscircuitos de control y los circuitos conectados al po-tencial de red. El VLT se ha diseñado para cumplirlos requisitos de separación de protección ya quecuenta con las distancias de frotamiento y de seguri-dad necesarias. Los requisitos se describen en lanorma EN 50 178. Además, la instalación deberárealizarse como se describe en los reglamentos na-cionales/locales sobre PELV.
Todos los terminales de control, terminales de co-municación serie y terminales de relé están aisladosdel potencial de red de manera segura y cumplenlos requisitos de PELV. Los circuitos conectados alos terminales de control 12, 18, 19, 20, 27, 29, 33,42, 46, 50, 53, 55 y 60 están galvánicamente conec-tados entre sí. La comunicación serie conectada alfieldbus está aislada galvánicamente de los termi-nales de control, aunque sólo tiene un aislamientofuncional.Los contactos de relé en los terminales 1 - 3 estánaislados de los demás circuitos de control con unaislamiento reforzado/doble y cumplen los requisitosde PELV, aunque haya potencial de red en los termi-nales de relé.
Los elementos de circuito que se describen a contin-uación forman el aislamiento eléctrico de seguridad.Cumplen los requisitos de un aislamiento reforzado/doble y las pruebas correspondientes de la normaEN 50 178.1. Aislamiento óptico y de transformador en el sum-
inistro de tensión.2. Aislamiento óptico entre el control básico del mo-
tor y la tarjeta de control.3. Aislamiento entre la tarjeta de control y la sec-
ción de potencia.4. Contactos de relé y terminales de otros circuitos
en la tarjeta de control.
Para los convertidores VLT Serie 2800:El aislamiento PELV de la tarjeta de control estáasegurada en las siguientes condiciones:- Red de TT con 300 Vrms como máximo entre
una fase y tierra.- Red de TN con 300 Vrms como máximo entre
fase y tierra.- Red de IT con 400 Vrms como máximo entre
fase y tierra.Para mantener el estado PELV, todas las conexionesrealizadas con los terminales de control deben ser
PELV, por ejemplo, el termistor debe disponer de unaislamiento reforzado/doble.
■ Corrientede fuga a tierra y relés RCD.La corriente de fuga a tierra está causada principal-mente por la capacitancia entre las fases del motory el apantallamiento del cable de motor. Cuando seutiliza un filtro RFI, contribuye a una mayor corrientede fuga, ya que el circuito del filtro se conecta atierra mediante condensadores.La cantidad de corriente de fuga a tierra depende delos siguientes factores, en este orden:1. Longitud del cable de motor2. Cable de motor con o sin apantallamiento3. Frecuencia de conmutación alta4. Utilización de filtro RFI5. Conexión del motor a tierra en el lugar de insta-
lación
La corriente de fuga es importante para la seguridaddurante el manejo y funcionamiento del convertidorde frecuencia, si, por equivocación, este no se haconectado a tierra.
¡NOTA!:Puesto que la corriente de fuga es > 3,5 mA,debe establecerse una conexión a tierra re-
forzada, necesaria para cumplir la norma EN 50178.La sección transversal del cable debe tener comomínimo 10 mm2 o se pueden utilizar 2 cables de es-pecificación nominal terminados por separado.
¡NOTA!:No utilice nunca relés RCD (tipo A) que nosean adecuados para corrientes de CC con
defectos procedentes de cargas de rectificadortrifásico.
Si se utilizan relés RCD, deben ser:- Adecuados para proteger equipos con contenido
de CC en la corriente defectuosa (puente rectifi-cador trifásico)
- Adecuados para una breve descarga con formade pulso durante el encendido
- Adecuados para una corriente de fuga alta (300mA)
Consulte la sección Conexión a tierra para obtenermás información.
■ Condiciones de funcionamientoextremasCortocircuito
MG.28.E5.05 - VLT es una marca registrada de Danfoss138

VLT® Serie 2800
El convertidor de frecuencia está protegido contracortocircuitos en los terminales del motor U, V, W(96, 97, 98). Un cortocircuito entre dos terminalesdel motor causa sobreintensidad en el módulo IGBT,lo que significa que se desconectarán individual-mente todos los transistores del módulo IGBT.El inversor se desconecta después de 5-10 �seg yel convertidor de frecuencia muestra un código defallo, que dependerá de la impedancia y la frecuen-cia del motor.
Fallo a tierraEl módulo IGBT se desconecta en 100 �seg siocurre un fallo a tierra en uno de los terminales delmotor U, V, W (96, 97, 98) según la impedancia y lafrecuencia del motor.
Conexión de salidaLos terminales U, V, W (96, 97, 98) para el motor sepueden conectar y desconectar todas las veces quesea necesario. No es posible dañar el convertidorde frecuencia conectando o desconectando los ter-minales de motor. Sin embargo, es posible queaparezcan mensajes de fallo.
Sobretensión generada por el motorLa tensión en el circuito intermedio aumenta cuandoel motor actúa como generador. Para proteger elconvertidor de frecuencia, el módulo IGBT se de-sconecta al alcanzarse una determinada tensión.La sobretensión generada en el motor puede ocurriren dos casos:1. La carga dirige el motor, es decir, la carga gen-
era energía.2. Durante la deceleración (rampa de deceleración),
si el momento de inercia es alto, la carga es bajay el tiempo de rampa de deceleración es demasi-ado corto para que la energía se disipe comopérdida en el convertidor, el motor o la unidadcompleta. La unidad de control intenta corregir larampa si es posible.
El fallo se puede eliminar si se conecta una resisten-cia de freno, o si el convertidor tiene un módulo defreno integrado. Si el convertidor no tiene un módulode freno, puede utilizarse el freno de CA, consulte elparámetro 400 Función de freno.Consulte la sección titulada Resistencias de freno .
Sobrecarga estáticaCuando el convertidor de frecuencia se sobrecarga(se alcanza el límite de intensidad del parámetro221 Límite de intensidad ILIM, el control reduce lafrecuencia de salida en un intento de reducir lacarga. Si la sobrecarga es excesiva, puede ocurriruna intensidad de salida que haga que se de-sconecte el convertidor tras aproximadamente 1,5
seg. Consulte el parámetro 409 Sobreintens. de re-traso de desconexión, ILIM.La sobrecarga excesiva hará que la frecuencia deconmutación se reduzca a 3000 Hz.
■ Relación du/dt en el motorCuando hay un transistor abierto en el inversor, latensión en los terminales del motor aumentará segúnuna relación tensión/tiempo (dU/dt) determinada por:- el cable de motor (tipo, sección, inducción, ca-
pacidad, longitud, apantallado o no)- la tensión de red
La autoinducción en el cable de motor causa unasobretensión UPEAK de la tensión de salida cada vezque se abre un transistor en el inversor. Después deUPEAK, la tensión de salida se estabiliza en un niveldeterminado por la tensión en el circuito intermedio.UPEAK y dU/dt influyen en la duración del motor, es-pecialmente en aquellos motores sin material deaislamiento de fase. Si el cable de motor es corto(pocos metros), la sobretensión UPEAK será baja,mientras que dU/dt será alta. Si el cable de motores largo (>20 m), UPEAK aumenta, mientras que dU/dt disminuye. Si se utilizan motores pequeños sinmaterial de aislamiento de fase, es recomendablemontar un filtro LC después del convertidor de fre-cuencia.
■ Conmutación en la entradaEl tiempo de espera de conmutación para la tensiónde red en los terminales 91, 92 y 93 debe ser de 30seg como mínimo.
■ Ruido acústicoEl ruido acústico del convertidor de frecuencia pro-cede de dos fuentes:1. Bobinas de CC del circuito intermedio2. Ventilador incorporado
A continuación, se indican los valores típicos medi-dos a una distancia de 1 m de la unidad a plenacarga:
VLT 2803-2815 1 x 220 V: 52 dB(A).VLT 2803-2822 3 x 220 V: 52 dB(A).VLT 2805-2840 3 x 400 V: 52 dB(A).
■ Reducción de potencia por temperatura ambienteLa temperatura ambiente (TAMB,MAX) es la máximatemperatura permitida. La media (TAMB,AVG) medidaen 24 horas debe ser como mínimo de 5 �C menos.Si el convertidor de frecuencia funciona a una tem-
MG.28.E5.05 - VLT es una marca registrada de Danfoss 139
Tod
oac
erca
del
VLT
2800

VLT® Serie 2800
peratura superior a 45 �C, es necesario reducir laintensidad de salida nominal.
■ Frecuencia de conmut. dependiente de temper-aturaEsta función asegura la máxima frecuencia de con-mutación posible sin que el convertidor defrecuencia tenga una sobrecarga térmica. La tem-peratura interna es la expresión real de cómo lafrecuencia de conmutación se puede basar en lacarga, la temperatura ambiente, la tensión de ali-mentación y la longitud del cable.Esta función asegura que el convertidor de frecuen-cia ajuste automáticamente la frecuencia deconmutación entre fsw,min y fsw, max (parámetro 411),consulte el siguiente dibujo.
Cuando se utiliza un filtro LC, la frecuencia de con-mutación mínima es 4,5 kHz.
■ Reducción de potencia debido a la presiónatmos-féricaA una altitud inferior a 1000 m, no es necesario re-ducir la potencia.A una altitud superior a 1000 m, se debe reducir latemperatura ambiente (TAMB) o la intensidad de sal-ida máxima (IMAX), según se indica en el siguientediagrama:1. Reducción de la intensidad de salida en relación
con la altitud a TAMB = máx. 45 �C.2. Reducción de la TAMB máxima en relación con la
altitud a una intensidad de salida del 100%.
■ Reducción de potencia debido a funcionamientoavelocidad lentaCuando se conecta un motor a un convertidor defrecuencia, es necesario asegurar el correcto enfri-amiento del motor. Con valores de RPM bajos, elventilador del motor no puede suministrar el volumenadecuado de aire para el enfriamiento. Este prob-lema aparece cuando el par de carga es constante(por ejemplo, en una cinta transportadora) en todo elrango de control. La menor cantidad de ventilacióndetermina el par admitido para el funcionamientocontinuo. Si el motor va a funcionar continuamente aunas RPM menores que la mitad del valor nominal,es necesario suministrar más aire de enfriamiento almotor. En vez de proporcionar un enfriamiento adi-cional, también es posible reducir la relación decarga del motor. Esto se realiza seleccionando unmotor más grande. Sin embargo, el diseño del con-vertidor de frecuencia restringe el tamaño de losmotores que pueden conectarse al mismo.
■ Reducción de potencia por cables de motor lar-gosEl convertidor de frecuencia se ha probado con uncable de 75 m no apantallado/no blindado y un ca-ble de 25 m apantallado/blindado, y está diseñadopara funcionar con cables de motor con seccionestransversales nominales. Si se necesita un cable
MG.28.E5.05 - VLT es una marca registrada de Danfoss140
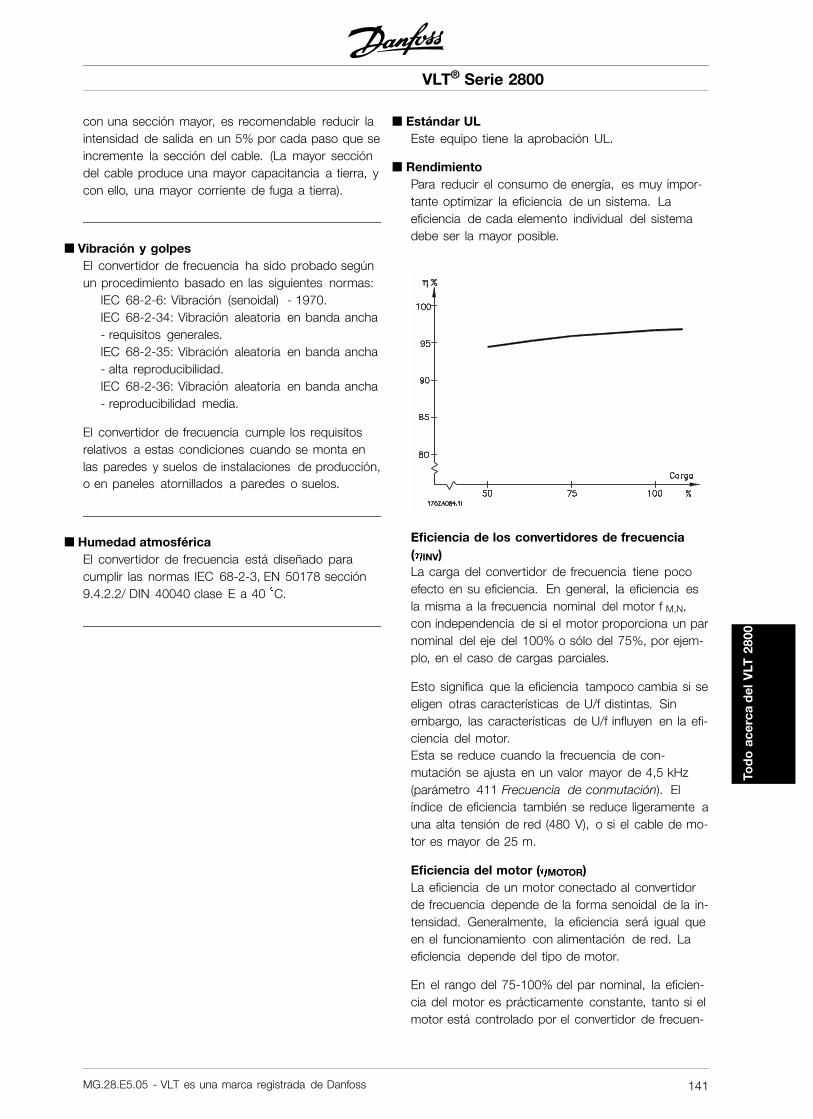
VLT® Serie 2800
con una sección mayor, es recomendable reducir laintensidad de salida en un 5% por cada paso que seincremente la sección del cable. (La mayor seccióndel cable produce una mayor capacitancia a tierra, ycon ello, una mayor corriente de fuga a tierra).
■ Vibración y golpesEl convertidor de frecuencia ha sido probado segúnun procedimiento basado en las siguientes normas:
IEC 68-2-6: Vibración (senoidal) - 1970.IEC 68-2-34: Vibración aleatoria en banda ancha- requisitos generales.IEC 68-2-35: Vibración aleatoria en banda ancha- alta reproducibilidad.IEC 68-2-36: Vibración aleatoria en banda ancha- reproducibilidad media.
El convertidor de frecuencia cumple los requisitosrelativos a estas condiciones cuando se monta enlas paredes y suelos de instalaciones de producción,o en paneles atornillados a paredes o suelos.
■ Humedad atmosféricaEl convertidor de frecuencia está diseñado paracumplir las normas IEC 68-2-3, EN 50178 sección9.4.2.2/ DIN 40040 clase E a 40 �C.
■ Estándar ULEste equipo tiene la aprobación UL.
■ RendimientoPara reducir el consumo de energía, es muy impor-tante optimizar la eficiencia de un sistema. Laeficiencia de cada elemento individual del sistemadebe ser la mayor posible.
Eficiencia de los convertidores de frecuencia(�INV)La carga del convertidor de frecuencia tiene pocoefecto en su eficiencia. En general, la eficiencia esla misma a la frecuencia nominal del motor f M,N,con independencia de si el motor proporciona un parnominal del eje del 100% o sólo del 75%, por ejem-plo, en el caso de cargas parciales.
Esto significa que la eficiencia tampoco cambia si seeligen otras características de U/f distintas. Sinembargo, las características de U/f influyen en la efi-ciencia del motor.Esta se reduce cuando la frecuencia de con-mutación se ajusta en un valor mayor de 4,5 kHz(parámetro 411 Frecuencia de conmutación). Elíndice de eficiencia también se reduce ligeramente auna alta tensión de red (480 V), o si el cable de mo-tor es mayor de 25 m.
Eficiencia del motor (�MOTOR)La eficiencia de un motor conectado al convertidorde frecuencia depende de la forma senoidal de la in-tensidad. Generalmente, la eficiencia será igual queen el funcionamiento con alimentación de red. Laeficiencia depende del tipo de motor.
En el rango del 75-100% del par nominal, la eficien-cia del motor es prácticamente constante, tanto si elmotor está controlado por el convertidor de frecuen-
MG.28.E5.05 - VLT es una marca registrada de Danfoss 141
Tod
oac
erca
del
VLT
2800

VLT® Serie 2800
cia como si funciona di rectamente con alimentaciónde red.
Generalmente, la frecuencia de conmutación noafecta a la eficiencia de los motores pequeños.
Eficiencia del sistema (�SYSTEM)Para calcular la eficiencia de un sistema, es nece-sario multiplicar el valor de eficiencia de losconvertidores (�INV) por el valor del motor (�MOTOR):�SYSTEM = � INV x �MOTOR.
A partir del gráfico anterior, es posible calcular la efi-ciencia de un sistema con distintas cargas.
■ Interferencia de la red de alimentación/armónicosEl convertidor de frecuencia acepta una intensidadno senoidal de la red eléctrica que aumenta la inten-sidad de entrada IRMS. Una intensidad no senoidalse puede transformar mediante un análisis Fourier ydividirse en intensidades senoidales con diferentesfrecuencias, es decir, distintos armónicos In con 50Hz como la frecuencia básica:
Armónicos I1 I5 I7Frecuencia[Hz] 50 250 350
Los armónicos no afectan directamente al consumoeléctrico, aunque aumentan las pérdidas de calor enla instalación (transformador, cables). Por ello, eninstalaciones con un porcentaje alto de carga rectifi-cada, es importante mantener los armónicos en unnivel bajo para evitar sobrecargar el transformador yuna alta temperatura de los cables.Algunos armónicos pueden causar interferencias enlos equipos de comunicación conectados al mismotransformador, o resonancia asociada con lasbaterías de corrección del factor de potencia.
■ Factor de potenciaEl factor de potencia (Pf) es la relación entre I1 eIRMS.El factor de potencia para control trifásico es:
Pf =
p3� U � I1� cos�p3 � U � IRMS
El factor de potencia indica la carga que impone elconvertidor de frecuencia sobre el suministro de red.Cuanto menor es el factor de potencia, mayor esIRMS para el mismo rendimiento en kW. Además, un
alto factor de potencia indica que los distintos ar-mónicos de tensión son bajos.
MG.28.E5.05 - VLT es una marca registrada de Danfoss142

VLT® Serie 2800
■ Normas de EMC/de productos genéricas
Estándar / entorno Residencial, comercial e industrialigera
Entorno industrial
Provenientede cables
Radiada Prove-niente decables
Radiada
EN 50081-1 Clase B Clase BEN 50081-2 Clase A Clase AEN 61800-3, i < 25ASINRESTRINGIR, i > 25A
Clase BClase A
Clase BClase A
Límites bajo análisis
EN 61800-3 RESTRINGIDA Clase A Clase A Límites bajo análisis
■ Emisionesde EMCLos siguientes resultados del sistema se hanobtenido en un equipo con un convertidor VLT Serie2800, un cable de control apantallado, un cuadro de
control con potenciómetro, un cable de motor apan-tallado, un cable de freno apantallado, y un panelLCP2 con cable.
VLT 2803-2875 Emisión
Entorno industrial Residencial, comercial e industria ligera
EN 55011 clase 1A EN 55011 clase 1B
Ajuste Proveniente de ca-bles
150 kHz - 30 MHz
Radiada30 MHz - 1 GHz
Proveniente de ca-bles
150 kHz - 30 MHz
Radiada30 MHz - 1 GHz
400 V versión con filtroRFI 1A
Sí25 m apantallado
Sí25 m apantallado
No No
200 V versión con filtroRFI 1A 1.
Sí40 m apantallado
Sí40 m apantallado
Sí15 m apantallado
No
200 V versión con filtroRFI 1A (R4: para usocon RCD)
Sí20 m apantallado
Sí20 m apantallado
Sí7 m apantallado
No
400 V versión con filtroRFI 1A+1B
Sí50 m apantallado
Sí50 m apantallado
Sí25 m apantallado
No
200 V versión con filtroRFI 1A+1B 1.
Sí100 m apantallado
Sí100 m apantallado
Sí100 m apantallado
No
VLT 2880-2882 Emisión
Entorno industrial Residencial, comercial e industria ligera
EN 55011 clase 1A EN 55011 clase 1B
Ajuste Proveniente de ca-bles
150 kHz - 30 MHz
Radiada30 MHz - 1 GHz
Proveniente de ca-bles
150 kHz - 30 MHz
Radiada30 MHz - 1 GHz
400 V versión con filtroRFI 1B
Sí50
Sí50
Sí50
No
1. Para los convertidores VLT 2822-2840 3 x 200-240V se aplican los mismos valores que para la ver-sión 400 V con filtro RFI 1A.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 143
Tod
oac
erca
del
VLT
2800

VLT® Serie 2800
• EN 55011: EmisiónLímites y métodos de las mediciones de carac-terísticas de alteraciones de radio del equipo dealta frecuencia industrial, científico y médico(ISM).
Clase 1A:Equipos utilizados en entornos industriales.
Clase 1B:Equipos utilizados en entornos con red de sumin-istro eléctrico pública (residenciales, comerciales eindustria ligera).
■ Inmunidad de EMCPara documentar la inmunidad a interferencias eléc-tricas, se han realizado las siguientes pruebas deinmunidad con un sistema formado por un conver-tidor de frecuencia, un cable de control apantallado,un cuadro de control con potenciómetro, cables demotor apantallados, un cable de freno apantallado yun panel de control LCP2 con cable.
Las pruebas se realizaron de acuerdo con las sigu-ientes normas básicas:
• EN 61000-4-4 (IEC 61000-4-4): Transitorios deráfaga
Simulación de la interferencia introducida por elacoplamiento con contactores, relés o disposi-tivos similares.
• EN 61000-4-5 (IEC 61000-4-5): Transitorios desobretensiónSimulación de transitorios introducidos, por ejem-plo, al caer rayos cerca de las instalaciones.
• EN 61000-4-2 (IEC 61000-4-2) : Descargaselectrostáticas (ESD)Simulación de descargas electrostáticas de sereshumanos .
• EN 61000-4-3(IEC 61000-4-3): Radiación decampo electromagnético entrante, con modu-lación de la amplitud.Simulación de efectos de equipos de radar y co-municación por radio, además de equipos decomunicación móviles.
• Prueba de pulsos VDE 0160 clase W2: Transi-torios de redSimulación de transitorios de alta energía intro-
ducidos por la avería de fusibles de red, elacoplamiento con baterías de corrección del fac-tor de potencia, etc.
• EN 61000–4–6 (IEC 61000-4-6): Modo comúnRFSimulación del efecto de equipos de transmisiónde radio conectados a cables de alimentación
Consulte la siguiente tabla sobre inmunidad de EMC.
MG.28.E5.05 - VLT es una marca registrada de Danfoss144

VLT® Serie 2800
Norma estándar Ráfaga61000-4-4
Sobreten-sión
61000-4-5
ESD61000-4-2
Radiada61000-4-3
Distorsióndered
VDE 0160
VoltajeRF CM. 2
61000-4-6
Criterios deaceptación
B B B A A
Conexión depuerto
CM DM / CM Campo DM CM
Línea OK / OK OKMotor OKLíneas de control OK - / OK 1 OKRelé OK - / OK OKProfibus OK - / OK 1 OKInterfaz deseñales<3 m
OK
Alojamiento OK OKBus estándar OK - / OK 1 OK
EspecificacionesbásicasLínea 2 kV / DCN 2 kV / 4kV 10 VrmsMotor 10 VrmsLíneas de control 2 kV / CCC 2 kV/2 1 10 VrmsRelé 2 kV / CCC 2 kV/2 1 10 VrmsProfibus 2 kV / CCC 2 kV/2 1 10 VrmsInterfaz deseñales<3 m
2 kV / CCC
Alojamiento 8 kV AD6 kV CD
10 V/m
Bus estándar 2 kV / CCC 2 kV/2 1 10 Vrms
DM: Modo diferencialCM: Modo comúnCCC: Acoplamiento de manguito capacitativo (5 kHz)DCN: Red de acoplamiento directo (5 kHz)1. Inyección en pantalla de cable.2. Manguito electromagnético.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 145
Tod
oac
erca
del
VLT
2800

VLT® Serie 2800
■ Entornos agresivosAl igual que cualquier equipo electrónico, los conver-tidores de frecuencia contienen varios componentesmecánicos y electrónicos que son vulnerables endiferente medida a la influencia del entorno.
Por lo tanto, el convertidor de frecuen-cia no debe instalarse en entornos dondehaya líquidos, partículas o gases en el
aire, pues podrían verse afectados los componenteselectrónicos. Si no se adoptan las medidas nece-sarias para proteger el convertidor de frecuencia,éste puede sufrir paradas que reducirán su duración.
Líquidos: el aire puede transportar líquidos que secondensan en el convertidor de frecuencia.Además, facilitan la corrosión galvánica de los com-ponentes y las piezas metálicas. El vapor, la grasa yel agua salada también pueden provocar la cor-rosión de los componentes y las piezas metálicas.En estas áreas es recomendable instalar lasunidades en armarios. Como mínimo, los armariosdeben ser alojamientos IP 54.
Partículas: las partículas suspendidas en el aire,como el polvo, pueden causar fallos mecánicos,eléctricos y térmicos en el convertidor de frecuencia.Un signo habitual de que hay demasiadas partículasen el aire es la concentración de partículas de polvoalrededor del ventilador del convertidor de frecuen-cia. En áreas muy polvorientas es recomendableinstalar las unidades en armarios. Como mínimo, losarmarios deben ser alojamientos IP 54.
Gases agresivos: los gases agresivos, como azufre,nitrógeno y cloro, así como una humedad y temper-atura altas, facilitan posibles procesos químicos enlos componentes del convertidor de frecuencia. Es-tos procesos afectan y dañan rápidamente loscircuitos electrónicos. En estas áreas es recomend-able instalar la unidad en armarios donde circule elaire, pues de este modo los gases agresivos semantienen alejados del convertidor de frecuencia.
¡NOTA!:La instalación de convertidores de frecuenciaen entornos agresivos aumenta el riesgo de
paradas y reduce considerablemente la duración dela unidad.
Antes de instalar el convertidor de frecuencia espreciso comprobar si hay líquidos, partículas ogases en el aire. Para ello basta con observar lasinstalaciones existentes en el mismo entorno. Unsigno habitual de líquidos perjudiciales suspendidosen el aire es la presencia de agua o grasa en las
piezas metálicas o la corrosión de éstas. Normal-mente, el exceso de partículas de polvo se observasobre los armarios de instalación e instalacioneseléctricas existentes. Un signo de que hay gasesagresivos en el aire es que los carriles de cobre ylos extremos de los cables de las instalaciones eléc-tricas existentes se ennegrecen.
MG.28.E5.05 - VLT es una marca registrada de Danfoss146

VLT® Serie 2800
■ Lectura deldisplayFrEl convertidor de frecuencia muestra la frecuenciade salida actual en hercios [Hz].
IoEl convertidor de frecuencia muestra la intensidadde salida actual en amperios [A].
UoEl convertidor de frecuencia muestra la tensión desalida actual en voltios [V].
UdEl convertidor de frecuencia muestra la tensión delcircuito intermedio en voltios [V].
PoEl convertidor de frecuencia muestra la salida calcu-lada en kilovatios [kW].
notrunSi se intenta cambiar un valor de parámetro con elmotor en funcionamiento aparece este mensaje.Pare el motor para cambiar el valor del parámetro.
LCPEste mensaje aparece si se instala una unidad decontrol LCP2 y se activa la tecla [QUICK MENU] o[CHANGE DATA]. Si se instala una unidad LCP2,sólo se pueden cambiar los parámetros así.
HaEl convertidor de frecuencia muestra la frecuenciade referencia de modo manual en hercios [Hz].
■ Advertencias/mensajes de alarmaLa advertencia y la alarma aparecerán en el displayen forma de código numérico Err. xx. Las adver-tencias permanecen en el display hasta que secorrija el fallo, mientras que las alarmas parpadeanhasta que se active la tecla [STOP/RESET].La tabla muestra las diferentes advertencias y alar-mas e indica si el fallo bloquea el convertidor defrecuencia. Tras un Bloqueo desconexión es pre-ciso cortar el suministro eléctrico y corregir el fallo.Después, vuelva a conectar la alimentación de lared y restablezca el convertidor de frecuencia, puesya está listo para su uso. La Desconexión se puederestablecer manualmente de tres maneras:1. Mediante la tecla de funcionamiento [STOP/RE-
SET].2. Con una entrada digital.3. Mediante la comunicación serie.
También se puede elegir un reset automático en elparámetro 405 Función de reset. Si aparece unacruz en la advertencia y la alarma, puede deberse aque hay otra advertencia antes de la alarma. Tam-bién es posible que el usuario puede programar siuna advertencia o una alarma aparecerán para de-terminado fallo. Por ejemplo, en el parámetro 128Protección térmica del motor. Después de una de-sconexión, el motor marchará por inercia, y laalarma y la advertencia parpadearán en el conver-tidor, aunque si el fallo desaparece sólo parpadearála alarma. Después del reset, el convertidor estarálisto para funcionar.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 147
Tod
oac
erca
del
VLT
2800

VLT® Serie 2800
Nº Descripción Adverten-cia
Alarma Bloqueode-
sconex-ión
2 Fallo de cero activo (FALLO CERO ACTIVO) X X X4 Pérdida de fase de red (PERDIDA FASE DE RED) X X X5 Advertencia de alta tensión (TENSION C.C. ALTA) X6 Advertencia de baja tensión (TENSION C.C. BAJA) X7 Sobretensión (SOBRETENSION C.C.) X X X8 Baja tensión (BAJATENSION C.C.) X X X9 Sobrecarga del inversor (TERMICO FC) X X10 Sobrecarga del motor (MOTOR, HORA) X X11 Termistor del motor (TERMISTOR MOTOR) X X12 Límite de intensidad (LIMITE INTENSIDAD) X X13 Sobreintensidad (SOBRECORRIENTE) X X X14 Fallo a tierra (FALLO TIERRA) X X15 Fallo del modo de conmutación (FALLO CONMUTACION) X X16 Cortocircuito (CORTOCIRCUITO) X X17 Intervalo de comunicación serie (TIEMPO BUS STD) X X18 Intervalo de bus HPFB (TIEMPO HPFB) X X33 Fuera de rango de frecuencia (RANGO FREC/SENT . GIRO) X34 Fallo de comunicación HPFB (FALLO OPC. PROFIBUS) X X35 Fallo de reconexión de corriente (FALLO RECONEC.) X X36 Temperatura excesiva (SOBRETEMP .) X X37-45 Fallo interno (ERROR INTERNO) X X50 AMT no es posible X51 AMT con fallo en datos de placa de característica (FALLO
TIPO DATOS AMT)X
54 AMT con motor incorrecto (AMT MOTOR INCORRECTO) X55 AMT con intervalo de tiempo (TIEMPO AMT) X56 AMT con advertencia durante AMT (AMT ADVERT . DU-
RANTE AMT)X
99 Bloqueado (BLOQUEADO) X
Indicación LEDAdvertencia amarillo
Alarma rojoDesconexión blo-
queadaamarillo y rojo
ADVERTENCIA/ALARMA 2: Fallo de cero activoLa señal de tensión o intensidad del terminal 53 o60 es menor al 50% del valor ajustado en elparámetro 309 o 315 Terminal, escalado mín..
ADVERTENCIA/ALARMA 4: Fallo de fase de redFalta una fase en la parte de suministro eléctrico.Compruebe la tensión de alimentación al convertidorde frecuencia. Este fallo sólo se activará en la ali-mentación de red trifásica. La alarma también
puede activarse cuando la carga esté en impulso.En tal caso, los pulsos se deberán amortiguar, porejemplo, con un disco inercial.
ADVERTENCIA 5: Advertencia de alta tensiónSi la tensión del circuito intermedio (UDC) es mayorque la Advertencia de alta tensión, el convertidormostrará una advertencia y el motor continuaráfuncionando sin cambios. Si la tensión UDC per-manece por encima del límite de alta tensión, elinversor se desconectará después de un intervalode tiempo ajustado. El intervalo depende de launidad y está ajustado en 5 - 10 seg. Nota: El con-vertidor de frecuencia se desconectará después deuna alarma 7 (alta tensión). También puede darseuna advertencia de tensión si la tensión de redconectada es excesiva. Compruebe si el suministro
MG.28.E5.05 - VLT es una marca registrada de Danfoss148

VLT® Serie 2800
de red es adecuado para el convertidor de frecuen-cia, consulte Datos técnicos. También puede ocurriruna advertencia de tensión si la frecuencia del mo-tor se reduce demasiado rápidamente debido a queel tiempo de rampa de deceleración sea demasiadocorto.
ADVERTENCIA 6: Advertencia de baja tensiónSi la tensión del circuito intermedio (UDC) es menorque la Advertencia de baja tensión, el convertidormostrará una advertencia y el motor continuaráfuncionando sin cambios. Si la tensión UDC per-manece por debajo del límite de advertencia de bajatensión, el inversor se desconectará después de untiempo ajustado. El intervalo depende de la unidad yestá ajustado en 2 -25 seg. Nota: El convertidor sedesconectará con una alarma 5 (baja tensión). Tam-bién puede darse una advertencia de tensión si latensión de red conectada es demasiado baja. Com-pruebe si la tensión de alimentación es adecuadapara el convertidor de frecuencia, consulte Datostécnicos. Cuando se apaga el convertidor, apareceuna advertencia 6 (y una advertencia 8) brevemente.
ADVERTENCIA/ALARMA 7: SobretensiónSi la tensión del circuito intermedio (UDC) aumentapor encima del Límite de sobretensión del inversor,éste se desconectará hasta que la tensión UDCvuelva a entrar dentro del límite de sobretensión. Sila tensión UDC permanece por encima de dicholímite, el inversor se desconectará después de un in-tervalo de tiempo ajustado. Este intervalo dependerádel dispositivo y está ajustado en 5 - 10 seg. Puedeocurrir una sobretensión en UDC cuando la frecuen-cia del motor se reduzca demasiado rápidamentedebido a un tiempo de rampa de deceleración de-masiado corto. Nota: La Advertencia de alta tensión(advertencia 5) también podrá generar una alarma 7.
ADVERTENCIA/ALARMA 8: Baja tensiónSi la tensión del circuito intermedio (UDC) es menorque el Límite de baja tensión del inversor, éste sedesconectará hasta que la tensión UDC vuelva aentrar dentro del límite de baja tensión. Si UDC per-manece por debajo del Límite de baja tensión, elinversor se desconectará en un intervalo de tiempoajustado. Este intervalo depende del dispositivo, yestá ajustado en 2 - 15 seg. También puede ocurriruna advertencia de baja tensión si la tensión de redconectada es demasiado baja. Compruebe si latensión de alimentación es adecuada para el conver-tidor de frecuencia, consulte Datos técnicos.Cuando el convertidor se apague, se mostrarábrevemente una advertencia 8 (y una advertencia6). Nota: La Advertencia de baja tensión (adverten-cia 6) también puede generar una alarma 8.
ADVERTENCIA/ALARMA 9: Sobrecarga del inver-sorLa protección termoelectrónica del inversor indicaque el convertidor de frecuencia está a punto de de-sconectarse debido a una sobrecarga (intensidad desalida excesiva durante demasiado tiempo). El con-tador de la protección térmica y electrónica delinversor emite una advertencia al 98% y se de-sconecta al 100% con una alarma. El convertidor nose puede restablecer hasta que el contador vuelva amenos del 90%. Esto fallo se deberá a que el con-vertidor ha tenido una sobrecarga demasiadotiempo.
ADVERTENCIA/ALARMA 10: Sobrecarga del mo-torLa protección termoelectrónica del inversor detectaque el motor está demasiado caliente. En elparámetro 128, el usuario puede seleccionar si elconvertidor VLT emitirá una advertencia o unaalarma cuando el contador alcance el 100%. Estefallo se debe a que el motor se sobrecarga más del100% durante demasiado tiempo. Compruebe quelos parámetros del motor 102–106 están ajustadoscorrectamente.
ADVERTENCIA/ALARMA 11: Termistor del motorEl motor está demasiado caliente o el termistor/conexión del termistor se ha interrumpido. En elparámetro 128 Protección térmica del motor, elusuario puede seleccionar si el convertidor emitiráuna advertencia o una alarma. Compruebe que eltermistor PTC esté correctamente conectado entrelos terminales 18, 19, 27 o 29 (entrada digital) y elterminal 50 (suministro de + 10 V).
ADVERTENCIA/ALARMA 12: Límite de intensidadLa intensidad de salida es mayor que el valor delparámetro 221 Límite de intensidad LIM, y el conver-tidor de frecuencia se desconectará después de unintervalo de tiempo que se ajusta en el parámetro409 Sobreintensidad de retraso de desconexión.
ADVERTENCIA/ALARMA 13: SobreintensidadSe ha sobrepasado el límite de intensidad pico delinversor (aproximadamente el 200% de la intensidadde salida nominal). Esta advertencia durará 1-2seg., y el convertidor se desconectará y emitirá unaalarma. Apague el convertidor de frecuencia y com-pruebe si gira el eje del motor, y si el tamaño delmotor es adecuado para el convertidor.
ALARMA 14: Fallo a tierraHay una descarga de las fases de salida a tierra, yasea en el cable que une el convertidor de frecuencia
MG.28.E5.05 - VLT es una marca registrada de Danfoss 149
Tod
oac
erca
del
VLT
2800

VLT® Serie 2800
y el motor o en el motor. Apague el convertidor ysolucione el fallo a tierra.
ALARMA 15: Fallo de modo de conmutaciónFallo en el suministro eléctrico del modo de con-mutación (alimentación interna). Diríjase a sudistribuidor de Danfoss.
ALARM: 16: CortocircuitoHay un cortocircuito en los terminales del motor oen el motor. Desconecte el suministro eléctrico alconvertidor de frecuencia y elimine el cortocircuito.
ADVERTENCIA/ALARMA 17: Intervalo de tiempode comunicación serieNo hay comunicación serie en el convertidor de fre-cuencia. Esta advertencia sólo se activará cuando elparámetro 514 Función interv. tiempo de bus seajuste en un valor distinto de NO. Si el parámetro514 Función interv. tiempo de bus se ajusta enParada y desconexión [5], el convertidor emitirá unaadvertencia, decelerará y se desconectará con unaalarma. El parámetro 513 Intervalo tiempo de buspuede incrementarse si es necesario
ADVERTENCIA/ALARMA 18: Intervalo de tiempode bus HPFBNo hay comunicación serie en la tarjeta de opciónde comunicación del convertidor. Esta advertenciasólo se activará cuando el parámetro 804 Funcióninterv. tiempo de bus se ajuste en un valor distintode NO. Si el parámetro 804 Función interv. tiempode bus se ajusta en Parada y desconexión, el con-vertidor primero dará una advertencia y despuésdecelerará y se desconectará con una alarma. Elparámetro 803 Interv. tiempo de bus puede incre-mentarse si es necesario.
ADVERTENCIA 33: Fuera del rango de frecuenciaEsta advertencia se activa si la frecuencia de salidaalcanza el limíte mínimo de frecuencia de salida(parámetro 201) o el límite máximo de frecuencia desalida (parámetro 202). Si el convertidor VLT estáen Proceso, modo de lazo cerrado (parámetro 100)esta advertencia se activará en el display. Si el con-vertidor de frecuencia VLT está en otro mododistinto que Proceso, modo de lazo cerrado, el bit008000 Fuera del rango de frecuencia del códigode estado ampliado estará activado, pero no semostrará la advertencia en el display.
ADVERTENCIA/ALARMA 34: Fallo de comuni-cación HPFBEste fallo de comunicación sólo ocurre en las ver-siones con Fieldbus. En lo que respecta al tipo dealarma, consulte el parámetro 953 en la docu-mentación de Fieldbus.
ALARMA 35: Fallo de entrada de corrienteEsta alarma se emite cuando el convertidor de fre-cuencia se ha reconectado a la alimentación de reddemasiadas veces en 1 minuto.
ADVERTENCIA/ALARMA 36: Temperatura exce-sivaSi la temperatura del módulo de potencia aumentapor encima de 75 - 85 �C (dependiendo del disposi-tivo) el convertidor emitirá una advertencia y el motorseguirá funcionando sin cambios. Si la temperaturacontinúa aumentando, se reducirá la frecuencia deconmutación automáticamente. Consulte Frecuenciade conmutación dependiente de la temperatura.Si la temperatura dentro del módulo de potencia au-menta por encima de 92 - 100 �C (dependiendo dela unidad) el convertidor de frecuencia se desconec-tará. Este fallo de temperatura no se puede reiniciara menos que la temperatura haya caído a menos de70 �C. La tolerancia es de ± 5 �C. La alta temper-atura puede deberse a lo siguiente:- La temperatura ambiente es excesiva.- El cable de motor es demasiado largo.- La tensión de la red es demasiado alta.
ALARMAS 37–45: Fallo internoSi se produce cualquiera de estos fallos, póngaseen contacto con Danfoss.
Alarma 37, fallo interno número 0: Fallo de comuni-cación entre la tarjeta de control y BMC.
Alarma 38, fallo interno número 1: Error de EEP-ROM Flash en la tarjeta de control.
Alarma 39, fallo interno número 2: Fallo de RAM enla tarjeta de control
Alarma 40, fallo interno número 3: Constante de cal-ibración en EEPROM.
Alarma 41, fallo interno número 4: Valores de datosen EEPROM.
Alarma 42, fallo interno número 5: Fallo en la basede datos de parámetros del motor.
Alarma 43, fallo interno número 6: Fallo general dela tarjeta de potencia.
Alarma 44, fallo interno número 7: Versión de soft-ware mínima de la tarjeta de control o BMC
Alarma 45, fallo interno número 8: Fallo de E/S (en-trada/salida digital, relé o entrada/salida analógica)
MG.28.E5.05 - VLT es una marca registrada de Danfoss150

VLT® Serie 2800
¡NOTA!:Cuando se reinicie el convertidor VLTdespués de una alarma 38–45, mostrará la
alarma 37 en el display. En el parámetro 615 se po-drá leer el código de alarma correspondiente.
ALARMA 50: AMT no es posiblePuede ocurrir una de estas tres posibilidades:- El valor RS calculado está fuera del límite permi-
tido.- La intensidad de una de las fases del motor,
como mínimo, es demasiado baja.- Es probable que el motor utilizado sea demasi-
ado pequeño para los cálculos de AMT.
ALARMA 51: Fallo AMT en los datos registradosen la placa de característicasHay discordancia entre los datos registrados del mo-tor. Compruebe los datos del motor para el Ajustecorrecto.
ALARMA 54: AMT motor incorrectoLa adaptación AMT no puede realizarse en el motorutilizado.
ALARMA 55: AMT intervalo de tiempoLos cálculos tardan demasiado tiempo, lo que puededeberse al ruido en los cables del motor.
ALARMA 56: AMT advertencia durante AMTEl convertidor de frecuencia emite una advertenciamientras se realiza la adaptación AMT.
ADVERTENCIA 99: BloqueadoConsulte el parámetro 18.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 151
Tod
oac
erca
del
VLT
2800

VLT® Serie 2800
■ Códigos de advertencia, códigosde estado ampli-ados y códigos de alarmaLos códigos de advertencia, de estado y de alarmaaparecen en el display en formato hexadecimal. Sihay varias advertencias, códigos de estado o alar-mas, se muestra la totalidad de los mismos. Loscódigos de advertencia, estado y alarma también sepueden leer con el bus serie, en los parámetros 540,541 y 538, respectivamente.
Bit (Hex) Códigos de advertencia000008 Retraso de bus HPFB000010 Retraso de bus estándar000040 Límite de intensidad000080 Termistor del motor000100 Sobrecarga del motor000200 Sobrecarga del inversor000400 Baja tensión000800 Sobretensión001000 Advertencia de tensión baja002000 Advertencia de tensión alta004000 Pérdida de fase010000 Error de cero activo400000 Fuera del rango de frecuencia800000 Fallo de comunicación de Profibus40000000 Advertencia de modo de con-
mutación80000000 Temperatura alta del disipador de
calor
Bit (Hex) Códigos de estado ampliados000001 Rampa000002 AMT en ejecución000004 Arranque adelante/inverso000008 Enganche abajo000010 Enganche arriba000020 Realimentación alta000040 Realimentación baja000080 Intensidad de salida alta000100 Intensidad de salida baja000200 Frecuencia de salida alta000400 Frecuencia de salida baja002000 Frenado008000 Fuera del rango de frecuencia
Bit (Hex) Códigos de alarma000002 Bloqueo de desconexión000004 Fallo de adaptación AMT000040 Retraso de bus HPFP000080 Retraso de bus estándar000100 Cortocircuito de intensidad000200 Fallo de modo de conmutación000400 Fallo de tierra000800 Sobreintensidad002000 Termistor del motor004000 Sobrecarga del motor008000 Sobrecarga del inversor010000 Baja tensión020000 Sobretensión040000 Pérdida de fase080000 Error de cero activo100000 Temperatura del disipador de calor
muy alta2000000 Fallo de comunicación Profibus8000000 Fallo de entrada10000000 Fallo interno
MG.28.E5.05 - VLT es una marca registrada de Danfoss152

VLT® Serie 2800
■ Datos técnicos generales
Alimentación de red (L1, L2, L3):
Tensión de alimentación VLT 2803-2815 220-240 V (N, L1) ...................................... 1 x 220/230/240 V ±10%Tensión de alimentación VLT 2803-2840 200-240 V ...................................... 3 x 200/208/220/230/240V ±10%Tensión de alimentación VLT 2805-2882 380-480 V ...................................... 3 x 380/400/415/440/480V ±10%Frecuencia de alimentación .................................................................................................................... 50/60 HzDesequilibrio máx. en tensión de alimentación ............................. ± 2% de la tensión de alimentación nominalFactor de potencia real (�) ................................................................................................ 0,9 a la carga nominalFactor de potencia de desplazamiento (cos ') ......................................................... cerca de la unidad (> 0,98)Nº de conexiones en entrada de alimentación L1, L2, L3 .............................................................. 2 veces/min.Valor de cortocircuito máx. ................................................................................................................... 100.000 AConsulte la sección Condiciones especiales de la Guía de Diseño
Datos de salida (U, V, W):
Tensión de salida ............................................................................................... 0 - 100% de tensión de aliment.Frecuencia de salida .................................................................................................... 0,2 - 132 Hz, 1 - 1000 HzTensión nominal del motor, unidades de 200-240 V ...................................................... 200/208/220/230/240VTensión nominal del motor, unidades 380-480 V .................................................... 380/400/415/440/460/480VFrecuencia nominal del motor ................................................................................................................ 50/60 HzConmutación en la salida ........................................................................................................................ IlimitadaTiempos de rampa ....................................................................................................................... 0,02 - 3600 seg
Características de par:
Par de arranque (parámetro 101 Característica de par = Par constante) ................................. 160% en 1 min.*
Par de arranque (parámetro 101 Características de par = Par variable) ................................... 160% en 1 min.*
Par de arranque (parámetro 119 Par de arranque alto) ................................................. 180% durante 0,5 seg.*
Par de sobrecarga (parámetro 101 Característica de par = Par constante) .............................................. 160%*
Par de sobrecarga (parámetro 101 Característica de par = Par variable) ................................................. 160%*
*Porcentaje relativo a la intensidad nominal del convertidor de frecuencia.
Tarjeta de control, entradas digitales:
Nº de entradas digitales programables ............................................................................................................... 5Nº de terminal ........................................................................................................................... 18, 19, 27, 29, 33Nivel de tensión .............................................................................................. 0 - 24 V CC (lógica positiva PNP)Nivel de tensión, ’0’ lógico ..................................................................................................................... < 5 V CCNivel de tensión, ’1’ lógico ................................................................................................................... > 10 V CCTensión máx. en entrada ....................................................................................................................... 28 V CCResistencia de entrada, Ri (terminales 18, 19, 27, 29) ..................................................................... aprox. 4 kResistencia de entrada, Ri (terminal 33) ........................................................................................... aprox. 2 kTodas las entradas digitales están aisladas galvánicamente de la tensión de alimentación (PELV) y de lasdemás entradas de alta tensión. Consulte la sección titulada Aislamiento galvánico.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 153
Tod
oac
erca
del
VLT
2800

VLT® Serie 2800
Tarjeta de control, entradas analógicas:
Nº de entradas de tensión analógicas ............................................................................................................... 1Nº de terminal .................................................................................................................................................. 53Nivel de tensión ............................................................................................................. 0 - 10 V CC (escalable)Resistencia de entrada, Ri .............................................................................................................. aprox. 10 kTensión máx. .................................................................................................................................................. 20 VNº de entradas de intensidad analógicas .................................................................................................. 1 pza.Nº de terminal .................................................................................................................................................. 60Nivel de intensidad ......................................................................................................... 0/4 - 20 mA (escalable)Resistencia de entrada, Ri ............................................................................................................... aprox. 300 Intensidad máx. ........................................................................................................................................... 30 mAResolución de entradas analógicas .......................................................................................................... 10 bitsPrecisión de entradas analógicas ......................................................................... Error máx. 1% de escala totalIntervalo de exploración ...................................................................................................................... 13,3 msegLas entradas analógicas están aisladas galvánivamente de la tensión de alimentación (PELV) y de los demásterminales de alta tensión. Consulte la sección titulada Aislamiento galvánico.
Tarjeta de control, entradas de pulsos:
Nº de entradas de pulsos programables ............................................................................................................. 1Nº de terminal .................................................................................................................................................... 33Frecuencia máx. en terminal 33 ......................................................................................... 67,6 kHz (contrafase)Frecuencia máx. en terminal 33 ..................................................................................... 5 kHz (colector abierto)Frecuencia mín. en terminal 33 .................................................................................................................... 4 HzNivel de tensión .............................................................................................. 0 - 24 V CC (lógica positiva PNP)Nivel de tensión, ’0’ lógico ..................................................................................................................... < 5 V CCNivel de tensión, ’1’ lógico ................................................................................................................... > 10 V CCTensión máx. en entrada ....................................................................................................................... 28 V CCResistencia de entrada, Ri ................................................................................................................ aprox. 2 kIntervalo de exploración ...................................................................................................................... 13,3 msegResolución ................................................................................................................................................. 10 bitsPrecisión (100 Hz- 1 kHz) en terminal 33 ........................................................ Error máx.: 0,5% de escala totalPrecisión (1 kHz - 67,6 kHz) en terminal 33 .................................................... Error máx.: 0,1% de escala totalLa entrada de pulsos (terminal 33) está aislada galvánicamente de la tensión de alimentación (PELV) y losdemás terminales de alta tensión. Consulte la sección Aislamiento galvánico.
Tarjeta de control, salida digital/de frecuencia:
Nº de salidas digitales/de pulsos programables ......................................................................................... 1 pza.Nº de terminal .................................................................................................................................................... 46Nivel de tensión en salida digital/de frecuencia ............................................. 0 - 24 V CC (lógica positiva PNP)Intensidad de salida máx. en salida digital/de frecuencia ........................................................................ 25 mA.Carga máx. en salida digital/de frecuencia ................................................................................................... 1 kCapacidad máx. en salida de frecuencia .................................................................................................... 10 nFFrecuencia de salida mín. en salida de frecuencia .................................................................................... 16 HzFrecuencia de salida máx. en salida de frecuencia .................................................................................. 10 kHzPrecisión en salida de frecuencia ................................................................... Error máx.: 0,2 % de escala totalResolución en salida de frecuencia ........................................................................................................... 10 bitsLa salida digital está aislada galvánicamente de la tensión de alimentación (PELV) y de los demás terminalesde alta tensión. Consulte la sección titulada Aislamiento galvánico.
MG.28.E5.05 - VLT es una marca registrada de Danfoss154

VLT® Serie 2800
Tarjeta de control, salida analógica:
Nº de salidas analógicas programables .............................................................................................................. 1Nº de terminal .................................................................................................................................................. 42Rango de intensidad en salida analógica ......................................................................................... 0/4 - 20 mACarga máx. común en salida analógica .................................................................................................... 500 Precisión en salida analógica ......................................................................... Error máx.: 1,5 % de escala totalResolución en salida analógica ................................................................................................................. 10 bitsLa salida analógica está aislada galvánicamente de la tensión de alimentación (PELV) y del resto de termi-nales de alta tensión. Consulte la sección titulada Aislamiento galvánico.
Tarjeta de control, alimentación de 24 V CC:
Nº de terminal .................................................................................................................................................... 12Carga máx. .............................................................................................................................................. 130 mALa alimentación de 24 V CC está aislada galvánicamente de la tensión de alimentación (PELV), aunque tieneel mismo potencial que las entradas y salidas analógicas y digitales. Consulte la sección titulada Aislamientogalvánico.
Tarjeta de control, alimentación de 10 V CC:
Nº de terminal .................................................................................................................................................. 50Tensión de salida ........................................................................................................................... 10,5 V ±0,5 VCarga máx. ................................................................................................................................................. 15 mALa alimentación de 10 V CC está aislada galvánicamente de la tensión de alimentación (PELV) y de los demásterminales de alta tensión. Consulte la sección titulada Aislamiento galvánico.
Tarjeta de control, comunicación serie RS 485:
Nº de terminal ........................................................................................................ 68 (TX+, RX+), 69 (TX-, RX-)Nº de terminal 67 ........................................................................................................................................... +5 VNº de terminal 70 ........................................................................................ Común para terminales 67, 68 y 69Aislamiento galvánico completo. Consulte la sección titulada Aislamiento galvánico.Para unidades CANopen/DeviceNet, consulte el manual VLT 2800 DeviceNet, MG.90.BX.YY .
Salidas de relé:
Nº de salidas de relé programables .................................................................................................................... 1Nº de terminal, tarjeta de control .................................................................................. 1-3 (corta), 1-2 (conecta)Carga máx. de terminal (CA) en 1-3, 1-2, tarjeta de control ........................................................ 240 V CA, 2 ACarga mín. de terminal en 1-3, 1-2, tarjeta de control ................................. 24 V CC 10 mA, 24 V CA 100 mAEl contacto de relé está separado del resto del circuito mediante un aislamiento reforzado. Consulte la seccióntitulada Aislamiento galvánico.
Longitud y sección de cables:
Long. máx. de cable de motor, cable apantallado ...................................................................................... 40 mLong. máx. de cable de motor, no apantallado .......................................................................................... 75 mLong. máx. de cable de motor, cable apantallado y bobina del motor ...................................................... 100 mLong. máx. de cable de motor, cable no apantallado y bobina del motor ................................................ 200 mLong. máx. de cable de motor, cable no apantallado y filtro RFI/1B ............................................ 200 V, 100 mLong. máx. de cable de motor, cable apantallado y filtro RFI/1B ................................................... 400 V, 25 mLong. máx. de cable de motor, cable apantallado y filtro RFI 1B/LC ............................................. 400 V, 25 mSección máx. al motor, consulte la siguiente sección.Sección máx. a los cables de control, cable rígido ....................................... 1,5 mm2/16 AWG (2 x 0,75 mm2)Sección máx. a los cables de control, cable flexible ................................................................... 1 mm2/18 AWGSección máx. a los cables de control, cable con núcleo recubierto ........................................ 0,5 mm2/20 AWGPara cumplir las normas EN 55011 1A y EN 55011 1B deberá acortarse el cable de motor en ciertas cir-cunstancias. Consulte Emisión de EMC.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 155
Tod
oac
erca
del
VLT
2800

VLT® Serie 2800
Características de control:
Rango de frecuencia .................................................................................................. 0,2 - 132 Hz, 1 - 1000 HzResolución de frecuencia de salida .............................................................................. 0,013 Hz, 0,2 - 1000 HzPrecisión repetida del Arranque/parada precisos(terminales 18, 19) ............................................ ≤ ± 0,5 msecTiempo de respuesta del sistema (terminales 18, 19, 27, 29, 33) ................................................. ≤ 26,6 msegRango de control de velocidad (lazo abierto) ........................................................... 1:15 de velocidad síncronaRango de control de velocidad (lazo cerrado) ....................................................... 1:120 de velocidad síncronaPrecisión de velocidad (lazo abierto) ..................................................... 90 - 3600 rpm: Error máx. de ±23 rpmPrecisión de velocidad (lazo cerrado) .................................................. 30 - 3600 rpm: Error máx. de ±7,5 rpmTodas las características de velocidad se basan en un motor asíncrono cuadrupolo
Entorno:
Alojamiento ................................................................................................................................................... IP 20Alojamiento con opciones ........................................................................................................................ NEMA 1Prueba de vibración ...................................................................................................................................... 0,7 gHumedad relativa máx. ............................................................................... 5% - 85% durante el funcionamientoTemperatura ambiente ............................................................. Máx. 45 �C (promedio de 24 horas máx. 40 �C)Reducción de potencia por alta temperatura ambiente, consulte la sección Condiciones especiales de la Guíade DiseñoTemperatura ambiente mín. durante el funcionamiento a escala completa ................................................ 0 �CTemperatura ambiente mín. en funcionamiento reducido ......................................................................... -10 �CTemperatura durante almacenamiento/transporte ....................................................................... -25 - +65/70 �CAltura máx. sobre el nivel del mar ........................................................................................................... 1.000 mReducción de potencia por alta presión atmosférica, consulte la sección Condiciones especiales de la Guía deDiseñoNormas de EMC utilizadas, Emisión ......................................................... EN 50081-2, EN 61800-3, EN 55011Normas de EMC utilizadas, Emisión ............. EN 50082-1/2, EN 61000-4-2, EN 61000-4-3, EN 61000-4-4, EN
61000-4-5, EN 61000-4-6, EN 61800-3Consulte la sección Condiciones especiales de la Guía de Diseño
Protecciones:
• Protección térmica electrónica del motor contra sobrecargas.• El control de temperatura del disipador asegura que el convertidor se desconectará si la temperatura llega a
100 �C. Esta temperatura de sobrecarga no se puede reiniciar hasta que el disipador esté a menos de 70 �C.• El convertidor está protegido contra sobrecircuitos en los terminales U, V, W del motor.• Si falta una fase de red, el convertidor de frecuencia se desconectará.• El control de la intensidad del circuito intermedio asegura que el convertidor se desconecte si la tensión del
circuito intermedio es demasiado alta o baja.• El convertidor de frecuencia está protegido contra fallo a tierra en los terminales U, V, W del motor.
MG.28.E5.05 - VLT es una marca registrada de Danfoss156

VLT® Serie 2800
■ Datos técnicos, alimentaciónde red 1 x 220- 240 V / 3 x 200 -240 V
Según estándares internacionales Tipo 2803 2805 2807 2811 2815 2822 2840
Intens. de salida IINV [A] 2,2 3,2 4,2 6 6,8 9,6 16
(3 x 200-240V) IMAX (60s) [A] 3,5 5,1 6,7 9,6 10,8 15,3 25,6
Potencia de salida(230 V)
SINV [KVA] 0,9 1,3 1,7 2,4 2,7 3,8 6,4
Potencia de eje típica PM,N [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3,7
Potencia de eje típica PM,N [HP] 0,5 0,75 1 1,5 2 3 5
Sección máx. de ca-ble, motor
[mm2/AWG] 1) 4/10 4/10 4/10 4/10 4/10 4/10 4/10
Intensidad de en-trada
IL,N [A] 5,9 8,3 10,6 14,5 15,2 - -
(1 x 220-240 V) IL,MAX (60s) [A] 9,4 13,3 16,7 23,2 24,3 - -
Intensidad de en-trada
IL,N [A] 2,9 4 5,1 7 7,6 8,8 14,7
(3 x 200-240 V) IL,MAX (60s) [A] 4,6 6,4 8,2 11,2 12,2 14,1 23,5
Sección máx. de ca-ble, potencia
[mm2/AWG] 1) 4/10 4/10 4/10 4/10 4/10 4/10 4/10
Fusibles previosmáx.
[A]/UL 2) [A] 20/20 20/20 20/20 20/20 20/20 20/20 25/25
Rendimiento3) [%] 95 95 95 95 95 95 95
Pérdida de potenciaa carga 100%.
[W] 24 35 48 69 94 125 231
Peso [kg] 2 2 2. 2 2 3,7 6
Alojamiento4 tipo IP 20 IP 20 IP 20 IP 20 IP 20 IP 20 IP 20
1. Diámetro de cable norteamericano. La secciónmáx. de cable es el mayor diámetro de cable quepuede conectarse a los terminales. Cumpla siem-pre los reglamentos nacionales y locales.2. Deben utilizarse fusibles previos tipo gG. Si sedesea cumplir UL/cUL, deben utilizar fusibles pre-vios Bussmann KTN-R 200 V, KTS-R 500 V oFerraz Shwmut, tipo ATMR (máx. 30 A). Estosfusibles deben proteger un circuito capaz de sum-inistrar un máximo de 100.000 amps RMS(simétrico), 500 V máx.3. Medido con un cable de motor apantallado de25 m a la carga y frecuencia nominales.4. IP20 es estándar para VLT 2805-2875, mientrasque NEMA 1 es una opción.
MG.28.E5.05 - VLT es una marca registrada de Danfoss 157
Tod
oac
erca
del
VLT
2800

VLT® Serie 2800
■ Datos técnicos, alimentaciónde red 3 x 380- 480 V
De acuerdo con estándares inter-
nacionales
Tipo 2805 2807 2811 2815 2822 2830
Intens. de salida I INV [A] 1,7 2,1 3 3,7 5,2 7
(3 x 380-480V) IMAX (60s) [A] 2,7 3,3 4,8 5,9 8,3 11,2
Potencia de salida
(400 V)
SINV [KVA] 1,1 1,7 2 2,6 3,6 4,8
Potencia de eje típica PM,N [kW] 0,55 0,75 1,1 1,5 2,2 3
Potencia de eje típica PM,N [HP] 0,75 1 1,5 2 3 4
Sección máx. de ca-
ble, motor
[mm2/AWG] 1) 4/10 4/10 4/10 4/10 4/10 4/10
Intensidad de entrada IL,N [A] 1,6 1,9 2,6 3,2 4,7 6,1
(3 x 380-480 V) IL,MAX(60s)[A] 2,6 3 4,2 5,1 7,5 9,8
Sección máx. de ca-
ble, potencia
[mm2/AWG] 1) 4/10 4/10 4/10 4/10 4/10 4/10
Fusibles previos máx. [A]/UL 2) [A] 20/20 20/20 20/20 20/20 20/20 20/20
Rendimiento3) [%] 96 96 96 96 96 96
Pérdida de potencia a
carga 100%.
[W] 28 38 55 75 110 150
Peso [kg] 2,1 2,1 2,1 2,1 3,7 3,7
Alojamiento4 tipo IP 20 IP 20 IP 20 IP 20 IP 20 IP 20
De acuerdo con estándares inter-
nacionales
Tipo 2840 2855 2875 2880 2881 2882
Intens. de salida IINV [A] 9,1 12 16 24 32 37,5
(3 x 380-480V) IMAX (60s) [A] 14,5 19,2 25,6 38,4 51,2 60
Potencia de salida
(400 V)
SINV [KVA] 6,3 8,3 11,1 16,6 22,2 26
Potencia de eje típica PM,N [kW] 4 5,5 7,5 11 15 18,5
Potencia de eje típica PM,N [HP] 5 7,5 10 15 20 25
Sección máx. de ca-
ble, motor
[mm2/AWG] 1) 4/10 4/10 4/10 16/6 16/6 16/6
Intensidad de entrada IL,N [A] 8,1 10,6 14,9 24 32 37,5
(3 x 380-480 V) IL,MAX(60s)[A] 13 17 23,8 38,4 51,2 60
Sección máx. de ca-
ble, potencia
[mm2/AWG] 1) 4/10 4/10 4/10 16/6 16/6 16/6
Fusibles previos máx. [A]/UL 2) [A] 20/20 25/25 25/25 50/50 50/50 50/50
Rendimiento3) [%] 96 96 96 97 97 97
Pérdida de potencia a
carga 100%.
[W] 200 275 372 412 562 693
Peso [kg] 3,7 6 6 18,5 18,5 18,5
Alojamiento4 tipo IP20 IP20 IP20 IP20/
NEMA 1
IP20/
NEMA 1
IP20/
NEMA 1
1. Diámetro de cable norteamericano. La secciónmáx. de cable es el mayor diámetro de cable quepuede conectarse a los terminales. Cumpla siem-pre los reglamentos nacionales y locales.2. Deben utilizarse fusibles previos tipo gG. Si sedesea cumplir UL/cUL, deben utilizar fusibles pre-vios Bussmann KTN-R 200 V, KTS-R 500 V oFerraz Shwmut, tipo ATMR (máx. 30 A). Estosfusibles deben proteger un circuito capaz de sum-
inistrar un máximo de 100.000 amps RMS(simétrico), 500 V máx.3. Medido con un cable de motor apantallado de25 m a la carga y frecuencia nominales.4. IP20 es estándar para VLT 2805-2875, mientrasque NEMA 1 es una opción.
MG.28.E5.05 - VLT es una marca registrada de Danfoss158

VLT® Serie 2800
■ Otra documentación
■ Suministrado con la unidadA continuación se enumera la documentacióndisponible para VLT 2800. Tenga presente quepuede haber diferencias entre un país y otro.
Suministrado con la unidad:
Manual de Funcionamiento ............................................................................................................. MG.28.AX.YYConfiguración Rápida ..................................................................... MG.28.BX.YY, MG.28.CX.YY, MG.28.FX.YYLista de parámetros ........................................................................................................................ MG.28.DX.YY
Otra documentación para VLT 2800:
Guía de Diseño ............................................................................................................................... MG.28.EX.YYHoja de datos .................................................................................................................................. MD.28.AX.YY
Instrucciones para VLT 2800:
Kit de montaje remoto LCP .............................................................................................................. MI.56.AX.51Instrucciones de filtros ....................................................................................................................... MI.28.B1.02
Comunicación con VLT 2800:
Manual Profibus .............................................................................................................................. MG.90.AX.YYManual VLT 2800 DeviceNet .......................................................................................................... MG.90.BX.YYX = número de versiónYY = idioma
MG.28.E5.05 - VLT es una marca registrada de Danfoss 159
Tod
oac
erca
del
VLT
2800

VLT® Serie 2800
■ Ajuste de fábrica
N�
par.Descripciónde parámetro
Ajuste de fábrica 4Ajustes
Índice deconversión
Tipo dedatos
001 Idioma Inglés No 0 5002 Control local/remoto Control remoto Sí 0 5003 Referencia local 000,000.000 Sí -3 4004 Activar ajuste Ajuste 1 No 0 5005 Editar ajuste Activar ajuste No 0 5006 Copiar ajuste No copiar No 0 5007 Copiar LCP No copiar No 0 5008 Mostrar escala de frecuencia 1.00 Sí -2 6009 Lectura del display amplia Frecuencia [Hz] Sí 0 5010 Lectura del display breve 1,1 Referencia [%] Sí 0 5011 Lectura del display breve 1,2 Intensidad del motor [A] Sí 0 5012 Lectura del display breve 1,3 Potencia [kW] Sí 0 5013 Modo ref. local Control remoto
como parám. 100Sí 0 5
014 Parada local/reset Activo Sí 0 5015 Veloc. fija local No activo Sí 0 5016 Cambio sentido local No activo Sí 0 5017 Desconexión o reset local Activo Sí 0 5018 Bloqueo de parámetros Desbloqueado Sí 0 5019 Estado en el
arranqueParada obligatoria,utilizar la refer. oculta
Sí 0 5
020 Bloqueo del modo manual Activo No 0 5024 Menú Rápido del usuario No activo No 0 5025 Ajuste de Menú Rápido 000 No 0 6
4 Ajustes:’Sí’ significa que este parámetro se puede progra-mar por separado en cada uno de los cuatroAjustes, es decir, puede tener cuatro valores dedatos distintos. ’No’ significa que el valor de datosdebe ser idéntico en todos los Ajustes.
Índice de conversión:Es una cifra de conversión que se utiliza al escribir oleer mediante la comunicación serie con un conver-tidor de frecuencia.ConsulteCaracteres de datos en Comunicación se-rie.
Tipo de datos:Indica el tipo y longitud de telegrama.
Tipo dedatos
Descripción
3 Entero 164 Entero 325 Sin signo 86 Sin signo 167 Sin signo 329 Cadena de texto
MG.28.E5.05 - VLT es una marca registrada de Danfoss160

VLT® Serie 2800
Par.#
Descripción deparámetros
Ajuste de fábrica 4Ajustes
Indice deconver-
sión
Tipo dedato
100 Configuración Velocidad, modo en lazocerrado
Sí 0 5
101 Características de par Par constante Sí 0 5102 Potencia del motor PM,N depende de las unidades Sí 1 6103 Tensión del motor UM,N depende de las unidades Sí 0 6104 Frecuencia del motor fM,N 50 Hz Sí -1 6105 Intensidad del motor I M,N depende del motor selec-
cionadoSí -2 7
106 Velocidad nominal del motor depende del par. 102 Sí 0 6107 Adaptación automática del motor Autoajuste desactivado Sí 0 5108 Resistencia del estátor RS depende del motor selec-
cionadoSí -3 7
109 Reactancia del estátor XS depende del motor selec-cionado
Sí -2 7
119 Par de arranque alto 0,0 seg Sí -1 5120 Retraso de arranque 0,0 seg Sí -1 5121 Función de arranque Inercia en retraso de ar-
ranqueSí 0 5
122 Función en parada Inercia Sí 0 5123 Frecuen. mín. activación de
par. 1220,1 Hz Sí -1 5
126 Tiempo de frenado de CC 10 seg Sí -1 6127 Frecuen. de entrada del freno
CCNO Sí -2 6
128 Protección térmica del motor Sin protección Sí 0 5130 Frecuencia de arranque 0,0 Hz Sí -1 5131 Tensión en el arranque 0,0 V Sí -1 6132 Tensión de freno de CC 0% Sí 0 5133 Tensión de arranque depende de las unidades Sí -2 6134 Compensación de carga 100 % Sí -1 6135 Relación U/f depende de las unidades Sí -2 6136 Compensación de deslizamiento 100 % Sí -1 3137 Tensión de CC mantenida 0% Sí 0 5138 Valor de desconexión de freno 3,0 Hz Sí -1 6139 Frecuencia de conexión de freno 3,0 Hz Sí -1 6140 Corriente, valor mínimo 0 % Sí 0 5142 Reactancia irregular depende del motor selec-
cionadoSí -3 7
143 Control de ventilador interno Automático Sí 0 5144 Factor de freno CA 1,30 Sí -2 5146 Vector de reinicialización de ten-
siónDesactivado Sí 0 5
MG.28.E5.05 - VLT es una marca registrada de Danfoss 161
Tod
oac
erca
del
VLT
2800

VLT® Serie 2800
PNU#
Descripciónde parámetro
Ajuste de fábrica 4 Ajustes Indiceconv.
Tipo dedato
200 Rango de frecuencia de salida Sentido hora, 0-132 Hz Sí 0 5201 Frecuencia mínima
fMIN
0,0 Hz Sí -1 6
202 Frecuencia máximafMAX
132 Hz Sí -1 6
203 Area de referencia Mín. ref.-Máx. ref. Sí 0 5204 Referencia mínima, RefMIN 0,000 Hz Sí -3 4205 Referencia máxima, RefMAX 50,000 Hz Sí -3 4206 Tipo de rampa Lineal Sí 0 5207 Tiempo de rampa de aceleración
13,00 seg Sí -2 7
208 Tiempo de rampa de decel-eración 1
3,00 seg Sí -2 7
209 Tiempo de rampa de aceleración2
3,00 seg Sí -2 7
210 Tiempo de rampa de decel-eración 2
3,00 seg Sí -2 7
211 Tiempo de rampa de velocidadfija
3,00 seg Sí -2 7
212 Tiempo rampa deceler. parorápido
3,00 seg Sí -2 7
213 Frecuencia de velocidad fija 10,0 Hz Sí -1 6214 Tipo de referencia Suma Sí 0 5215 Referencia interna 1 0,00% Sí -2 3216 Referencia interna 2 0,00% Sí -2 3217 Referencia interna 3 0,00% Sí -2 3218 Referencia interna 4 0,00% Sí -2 3219 Valor de enganche/
arriba-abajo0,00% Sí -2 6
221 Límite de intensidad 160 % Sí -1 6223 Adv. Intensidad baja 0,0 A Sí -1 6224 Adv. Intensidad alta IMAX Sí -1 6225 Adv. Baja frecuencia 0,0 Hz Sí -1 6226 Adv. Alta frecuencia 132,0 Hz Sí -1 6227 Adv. Baja realimentación -4000,000 Sí -3 4228 Adv. Alta realimentación 4000,000 Sí -3 4229 Bypass de frecuencia,
ancho de banda0 Hz (NO) Sí 0 6
230 Bypass de frecuencia 1 0,0 Hz Sí -1 6231 Bypass de frecuencia 2 0,0 Hz Sí -1 6
MG.28.E5.05 - VLT es una marca registrada de Danfoss162

VLT® Serie 2800
N�
par.#Descripciónde parámetro
Ajuste de fábrica 4Ajustes
Indiceconv.
Tipode dato
302 Entrada digital, term. 18 Arranque Sí 0 5303 Entrada digital, term. 19 Inversión Sí 0 5304 Entrada digital, term. 27 Reset y parada de inercia
inversaSí 0 5
305 Entrada digital, term. 29 Velocidad fija Sí 0 5307 Entrada digital, term. 33 Sin función Sí 0 5308 Term. 53, tensión de entrada
analóg.Referencia Sí 0 5
309 Term. 53, escalado mín. 0,0 V Sí -1 6310 Term. 53, escalado máx. 10,0 V Sí -1 6314 Term. 60, intensidad de entrada
analóg.Sin función Sí 0 5
315 Term. 60, escalado mín. 0,0 mA Sí -4 6316 Term. 60, escalado máx. 20,0 mA Sí -4 6317 Intervalo de tiempo 10 seg Sí 0 5318 Función tras intervalo de tiempo Sin función Sí 0 5319 Term. 42, salida analógica 0-IMAX = 0-20 mA Sí 0 5323 Salida de relé Unidad preparada Sí 0 5327 Refer./realiment. de pulsos 5000 Hz Sí 0 7341 Term. 46, salida digital Unidad preparada Sí 0 5342 Term. 46, salida de pulsos máx. 5000 Hz Sí 0 6343 Función de parada precisa Parada de rampa normal Sí 0 5344 Valor de contador 100.000 pulsos Sí 0 7349 Retardo compensación de
parada10 ms Sí -3 6
4 Ajustes:’Sí’ significa que este parámetro se puede progra-mar por separado en cada uno de los cuatroAjustes, es decir, puede tener cuatro valores de datodistintos. ’No’ significa que el valor de dato debe seridéntico en todos los Ajustes.
Indice de conversión:Es una cifra de conversión que se utiliza al escribir oleer mediante la comunicación serie con un conver-tidor de frecuencia.ConsulteCaracteres de dato en Comunicación serie.
Tipo de dato:Indica el tipo y longitud de telegrama.
Tipo de dato Descripción3 Entero 164 Entero 325 Sin signo 86 Sin signo 167 Sin signo 329 Cadena de texto
MG.28.E5.05 - VLT es una marca registrada de Danfoss 163
Tod
oac
erca
del
VLT
2800
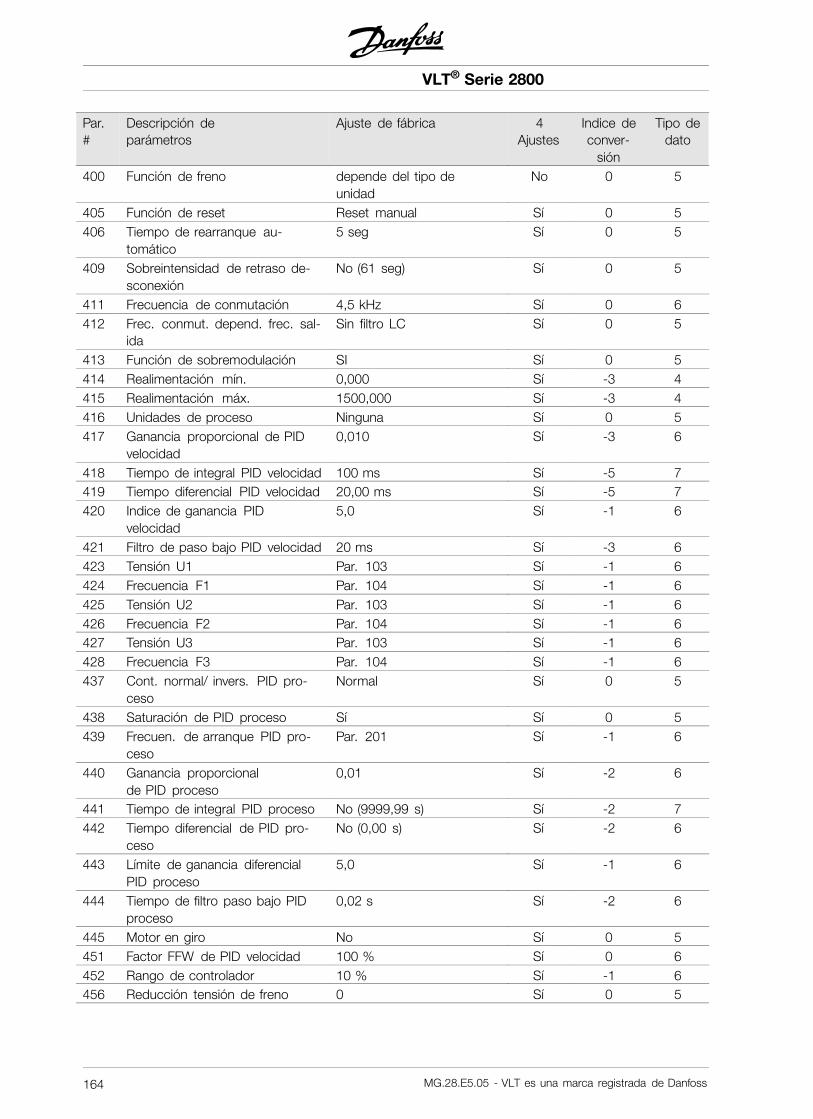
VLT® Serie 2800
Par.#
Descripción deparámetros
Ajuste de fábrica 4Ajustes
Indice deconver-
sión
Tipo dedato
400 Función de freno depende del tipo deunidad
No 0 5
405 Función de reset Reset manual Sí 0 5406 Tiempo de rearranque au-
tomático5 seg Sí 0 5
409 Sobreintensidad de retraso de-sconexión
No (61 seg) Sí 0 5
411 Frecuencia de conmutación 4,5 kHz Sí 0 6412 Frec. conmut. depend. frec. sal-
idaSin filtro LC Sí 0 5
413 Función de sobremodulación SI Sí 0 5414 Realimentación mín. 0,000 Sí -3 4415 Realimentación máx. 1500,000 Sí -3 4416 Unidades de proceso Ninguna Sí 0 5417 Ganancia proporcional de PID
velocidad0,010 Sí -3 6
418 Tiempo de integral PID velocidad 100 ms Sí -5 7419 Tiempo diferencial PID velocidad 20,00 ms Sí -5 7420 Indice de ganancia PID
velocidad5,0 Sí -1 6
421 Filtro de paso bajo PID velocidad 20 ms Sí -3 6423 Tensión U1 Par. 103 Sí -1 6424 Frecuencia F1 Par. 104 Sí -1 6425 Tensión U2 Par. 103 Sí -1 6426 Frecuencia F2 Par. 104 Sí -1 6427 Tensión U3 Par. 103 Sí -1 6428 Frecuencia F3 Par. 104 Sí -1 6437 Cont. normal/ invers. PID pro-
cesoNormal Sí 0 5
438 Saturación de PID proceso Sí Sí 0 5439 Frecuen. de arranque PID pro-
cesoPar. 201 Sí -1 6
440 Ganancia proporcionalde PID proceso
0,01 Sí -2 6
441 Tiempo de integral PID proceso No (9999,99 s) Sí -2 7442 Tiempo diferencial de PID pro-
cesoNo (0,00 s) Sí -2 6
443 Límite de ganancia diferencialPID proceso
5,0 Sí -1 6
444 Tiempo de filtro paso bajo PIDproceso
0,02 s Sí -2 6
445 Motor en giro No Sí 0 5451 Factor FFW de PID velocidad 100 % Sí 0 6452 Rango de controlador 10 % Sí -1 6456 Reducción tensión de freno 0 Sí 0 5
MG.28.E5.05 - VLT es una marca registrada de Danfoss164

VLT® Serie 2800
N�
par.#Descripciónde parámetro
Ajuste de fábrica 4Ajustes
Indiceconv.
Tipode dato
500 Dirección 1 No 0 5501 Velocidad en baudios 9600 baudios No 0 5502 Parada de inercia O lógico Sí 0 5503 Parada rápida O lógico Sí 0 5504 Freno de CC O lógico Sí 0 5505 Arranque O lógico Sí 0 5506 Cambio del sentido de giro O lógico Sí 0 5507 Selección de Ajuste O lógico Sí 0 5508 Selección de referencia interna O lógico Sí 0 5509 Veloc. fija de bus 1 10,0 Hz Sí -1 6510 Veloc. fija de bus 2 10,0 Hz Sí -1 6512 Indicar telegrama Protocolo FC Sí 0 5513 Intervalo de tiempo de bus 1 seg Sí 0 5514 Función de interv. tiempo bus No Sí 0 5515 Lectura: Referencia % No -1 3516 Lectura: Unidad[de referencia] No -3 4517 Lectura: Realimentación[unidad] No -3 4518 Lectura: Frecuencia No -1 3519 Lectura: Frecuencia x escalado No -1 3520 Lectura: Intensidad del motor No -2 7521 Lectura: Par No -1 3522 Lectura: Potencia[kW] No 1 7523 Lectura: Potencia[HP] No -2 7524 Lectura: Tensión del motor[V] No -1 6525 Lectura: Tensión de enlace CC No 0 6526 Lectura: Carga térmica del motor No 0 5527 Lectura: Carga térmica del inversor No 0 5528 Lectura: Entrada digital No 0 5529 Lectura: Entrada analógica , term. 53 No -1 5531 Lectura: Entrada analógica, term. 60 No -4 5532 Lectura: Referencia de pulsos No -1 7533 Lectura: Referencia externa No -1 6534 Lectura: Código de estado No 0 6537 Lectura: Temperatura del inversor No 0 5538 Lectura: Código de alarma No 0 7539 Lectura: Código de control No 0 6540 Lectura: Código de aviso No 0 7541 Lectura: Código de estado ampliado No 0 7544 Lectura: Contador de pulsos No 0 7
MG.28.E5.05 - VLT es una marca registrada de Danfoss 165
Tod
oac
erca
del
VLT
2800

VLT® Serie 2800
N�
par.#Descripciónde parámetro
Ajuste de fábrica 4Ajustes
Indiceconv.
Tipode dato
600 Horas de funcionamiento No 73 7601 Horas ejecutadas No 73 7602 Contador de kWh No 2 7603 Nº puestas en marcha No 0 6604 Nº de sobrecalentamientos No 0 6605 Nº de sobretensiones No 0 6615 Registro fallos: Código de error No 0 5616 Registro fallos: Hora No 0 7617 Registro fallos: Valor No 0 3618 Reset del contador de kWh Sin reset No 0 7619 Reset contador de horas ejecu-
tadasSin reset No 0 5
620 Modo de funcionamiento Funcionamiento normal No 0 5621 Placa características: Tipo de convertidor de frecuencia No 0 9624 Placa características: Versión de software No 0 9625 Placa características: Nº identific. de LCP No 0 9626 Placa características: Nº identif. base de datos No -2 9627 Placa características: Versión partes de potencia No 0 9628 Placa características: Tipo de opción de aplicación No 0 9630 Placa características: Tipo de opción de comunicación No 0 9632 Placa características: Identific. de software BMC No 0 9633 Placa características: Identif. base de datos del motor No 0 9634 Placa características: Identific. de unidades para comunicación No 0 9635 Placa características: Nº de
parte de softwareNo 0 9
640 Versión de software No -2 6641 Identific. de software BMC No -2 6642 Identific. de tarjeta de alimentación No -2 6
4 Ajustes:’Sí’ significa que este parámetro se puede progra-mar por separado en cada uno de los cuatroAjustes, es decir, puede tener cuatro valores de datodistintos. ’No’ significa que el valor de dato debe seridéntico en todos los Ajustes.
Indice de conversión:Es una cifra de conversión que se utiliza al escribir oleer mediante la comunicación serie con un conver-tidor de frecuencia.ConsulteCaracteres de dato en Comunicación serie.
Tipo de dato:Indica el tipo y longitud de telegrama.
Tipo de dato Descripción3 Entero 164 Entero 325 Sin signo 86 Sin signo 167 Sin signo 329 Cadena de texto
MG.28.E5.05 - VLT es una marca registrada de Danfoss166

VLT® Serie 2800
AAdaptación automática del motor .................................... 32
Adaptación automáticadel motor ..................................... 73
Advertencia de alta tensión ............................................43
Advertencias/mensajes de alarma ................................. 147
Aislamientogalvánico (PELV).........................................138
Arriba-........................................................................87
BBobinas delmotor..........................................................11
CCódigos de advertencia, códigosdeestado ampliados y códi-
gos de alarma............................................................152
Códigos de control......................................................118
Códigos de estado .....................................................120
Cables de motor...........................................................53
Cambio de sentido........................................................92
CANopen....................................................................98
Carácter de dato (byte)................................................114
Carga compartida.........................................................54
CHANGE DATA............................................................30
Como protección adicional pueden utilizarserelés RCD.......44
Compensación de arranque ...........................................78
Compensación de deslizamiento..................................... 78
Conectado...................................................................76
Conector D-Sub ........................................................... 58
Conexión a tierra..........................................................43
Conexión de relés.........................................................57
Conexión del freno........................................................54
Conexión del motor.......................................................52
Conexión en paralelo de motores....................................53
Conexióna tierra...........................................................54
Conexiónde red............................................................52
Control de freno mecánico .............................................54
Convertidorde frecuencia.................................................6Correctos para EMC ..................................................... 46
Corriente, valor mínimo..................................................79
Corrientede fuga a tierra ............................................. 138
DDígitos........................................................................30
De arranque alto .......................................................... 74
Del motor ...................................................................72
DeviceNet .................................................................. 10
Diagrama ....................................................................48
Dimensiones mecánicas ................................................39
Dirección...................................................................126
Documentación...........................................................159
E
El diferenciador .......................................................... 104
El manejo de la .........................................................104
Emisionesde EMC ...................................................... 143
En giro......................................................................110
Entornos agresivos ..................................................... 146
Entradas digitales.........................................................92
Estándar UL ..............................................................141
ETR -relé térmico electrónico ......................................... 76
FFactor de potencia ......................................................142
Fieldbusoption..............................................................10
Filtro de paso bajo integrado.........................................104
Filtro LC......................................................................13
Filtro RFI 1B/LC...........................................................13
Filtro RFI1B.................................................................12
Formulario de pedido .................................................... 20
Frecuencia de arranque.................................................77
Frecuencia de conexiónde freno......................................79
Frecuencia de conmut. dependiente de temperatura.........140
Frecuencia de conmutación ..........................................101
Frecuencia de velocidadfija ............................................ 85
Frecuencia del motor.....................................................72
Frenado de CC ............................................................ 75
Frenado dinámico.........................................................23
Freno de CA ..............................................................100
Función de arranque.....................................................74
Función de freno ........................................................ 100
Función de paradaprecisa..............................................98
Función de reset.........................................................100
Función de sobremodulación ........................................ 101
Fusiblesprevios ............................................................ 52
GGanancia del freno CA.................................................. 80
Ganancia proporcional ................................................106
HHumedad atmosférica..................................................141
IIdioma ........................................................................63
Indicar telegrama........................................................130
Inicialización ..............................................................134
Inicialización manual................................................30, 38
Instalacióneléctrica, cables de control .............................. 55
Instalaciónmecánica......................................................41
Integración .................................................................41
Intensidad del motor ..................................................... 72
Intervalo de tiempo....................................................... 95
Intervalo tiempo de bus................................................130
MG.28.E5.05 - VLT es una marca registrada de Danfoss 167

VLT® Serie 2800
LLímite de intensidad ......................................................87
La regulación de velocidad ..........................................102
Las funciones de advertencia ......................................... 87
LCP ........................................................................... 33
Lectura deldisplay....................................................... 147
Los cables de control ....................................................55
Los parámetros del Menúrápido......................................31
MMáxima.....................................................................103
Mín...........................................................................101
Mínima ....................................................................... 83
Manejo de referencias...................................................82
Manual y automático.....................................................31
Marca CE .....................................................................7
Menú Rápido...............................................................31
Menúrápido, definido por el usuario .................................70
Modo de Display .....................................................31, 34
Modo de Display ......................................................... 33
Modo de Menú.............................................................31
Modo de Menú,............................................................31
Modo de motor especial ................................................ 71
Modo manual...............................................................69
PPanel de control ...........................................................30
Par constante...............................................................71
Par variable.................................................................71
Potencia de frenado......................................................24
Potencia del motor........................................................72
Preajustarse un rango de realimentación ....................... 103
Principio de control.........................................................5Proceso ................................................................... 102
Proceso, modo en lazo cerrado.......................................71
Profibus ......................................................................10
Protección adicional......................................................44
Protección térmicadel motor...........................................54
Protección térmicadel motor ..........................................76
Protector de red.............................................................5Protocolos .................................................................112
Prueba de alta tensión .................................................. 44
QQUICKMENU...............................................................30
RRango de frecuencia.....................................................81
RCD...........................................................................54
Reactancia estátor........................................................74
Reactancia irregular......................................................79
Reducción tensiónde freno ...........................................111
Referencia interna ........................................................ 86
Referencia local ........................................................... 63
Referencia/realimentaciónde pulso...................................98
Registro de fallos........................................................133
Regulación ................................................................ 108
Relé 1–3, salida ...........................................................97
Relación du/dt en el motor............................................139
Relación U/f.................................................................78
Relativa ...................................................................... 86
Rendimiento...............................................................141
Resistencia de freno.......................................................9Resistencia del estátor .................................................. 73
Resistenciasdefreno......................................................27
Retardo compensaciónde parada ....................................99
Retraso de arranque .....................................................74
Ruido acústico............................................................139
SSalida analógica,..........................................................96
Salida digital................................................................98
Sentido de giro de motor ............................................... 53
SoftwareDialog.............................................................57
STOP/RESET ..............................................................30
Suma ......................................................................... 86
TTensión de arranque ..................................................... 77
Tensión de CC mantenida..............................................79
Tensión de frenode CC..................................................77
Tensión del motor.........................................................72
Tensiónde entrada ........................................................94
Terminales de control.................................................... 55
Termistor.....................................................................93
Tiempo de frenado de CC..............................................76
Tiempo de rampa de aceleración .................................... 84
Tiempo de rampa de deceleración...................................84
Tiempo de rampa de velocidadfija ...................................84
Tiempo rampa deceler. parorápido.................................. 85
Tipo de rampa ............................................................. 83
Tipo de referencia.........................................................86
Tráfico de telegramas .................................................. 112
UUnidad de proceso......................................................102
VValor de contador .........................................................99
Valor de desconexiónde freno.........................................79
Valor de enganche........................................................87
Vector de reinicializaciónde tensión..................................80
MG.28.E5.05 - VLT es una marca registrada de Danfoss168

VLT® Serie 2800
Veloc. fija de bus........................................................130
Velocidad en baudios...................................................126
Velocidad, modo en lazo abierto ..................................... 71
Velocidad, modo en lazo cerrado.....................................71
Ventilador interno..........................................................80
MG.28.E5.05 - VLT es una marca registrada de Danfoss 169