voiture swapnil agrawal tauseef ahmed kanwal gill syed jafri varun kalia
TRANSCRIPT
Voiture
Swapnil AgrawalTauseef Ahmed
Kanwal GillSyed Jafri
Varun Kalia

Overview
• Introduction• Design Approach
Challenges and Lessons Learnt1. Manual Competition2. Autonomous Competition
• Strategy and Further Plans
Introduction
• Voiture is a robot built by Vexotech Inc.• Varun Kalia and Tauseef Ahmed – Incharge of
Structure• Swapnil Agrawal and Syed Jafri – Incharge of
Programming and Logic• Kanwal Gill – Incharge of the 3D design in ProE
and Co-ordination of the group

Objectives
• To prepare a robot from the given kit so that it satisfies the requirements of the course in both the Manual and Autonomous modes.
• To gain full control of the robot by using optimal speed such that the robot is controllable in any kind of situation.

Design Approach
Manual Competition

Challenges and Lessons Learnt
• Slope in the course might cause the robot to fall.

• This can be prevented by keeping the Centre of Gravity close to the ground.

• Motor powering only 2 wheels causes inefficiency in movement.
• This will be fixed by adding idler gears to the system making all the four wheels efficient.

• Weight focussed on one side causes problems while turning the robot.
• Problem solved by distributing the weight equally throughout the robot.

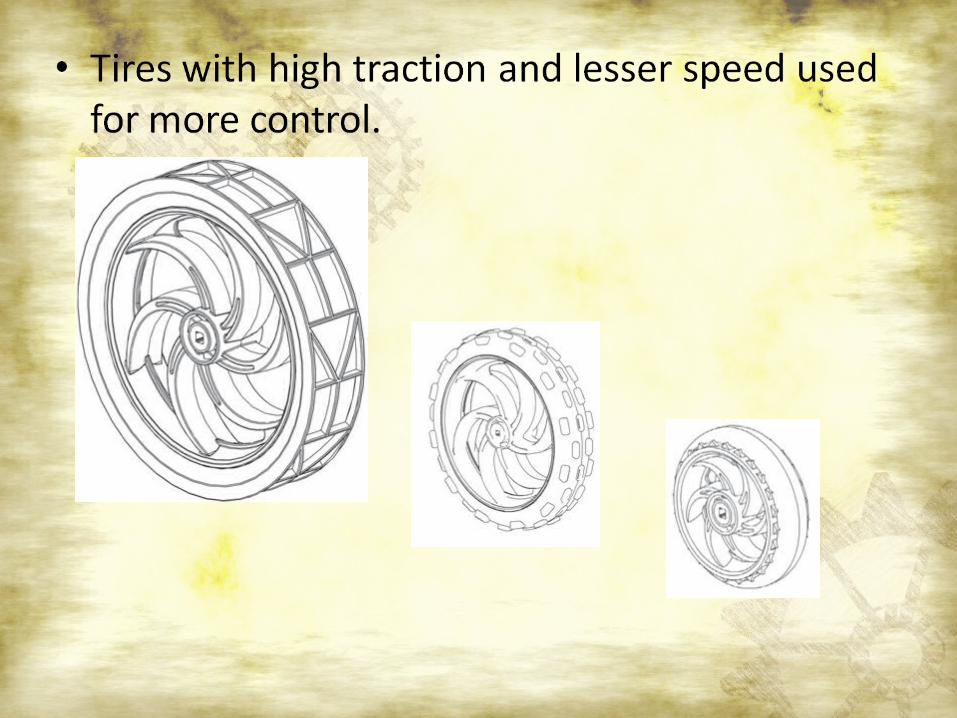
• Using bigger tires also helps in increasing ground clearance helping Voiture clear uneven paths like the one on the course.

Design Approach
• Autonomous Competition

Challenges and Lessons Learnt
• Position of bumper sensors was ineffective on the basic design.
• Problem solved by improvising the design by adding an extension to the robot to carry the sensors and increase flexibility for movement.

• Improvising the basic design to make the robot more functional.
• Making sure that all the requirements of the course are met by programming the robot.
• Achieving full control over the response of the robot in any situation.
• Using all the available sensors to get the best out of the available resources
Strategy and Further Plans
• Objectives• Increase control over the robot in both
manual and autonomous modes.• Improvise design to gain speed and stability.

• Futher Plans• Use all types of sensors and program the
robot for total automatic control in autonomous mode.
• Use the motor to power all 4 wheels.• Test the robot on the course to check other
problems that can be encountered during the competition.