volume conserving simulation of deformable bodies · volume conserving simulation of deformable...
TRANSCRIPT

Volume Conserving Simulation of Deformable Bodies
Raphael Diziol Jan Bender Daniel Bayer
Universität Karlsruhe (TH), Karlsruhe, Germany
AbstractWe present a new method for simulating volume conserving deformable bodies using an impulse-based approach.In order to simulate a deformable body a tetrahedral model is generated from an arbitrary triangle mesh. Allresulting tetrahedrons are assigned to volume constraints which ensure the conservation of the total volume. Forthe simulation of such a constraint impulses are computed and applied to the particles of the assigned tetrahedrons.The algorithm is easy to implement and ensures exact volume conservation in each simulation step.
Categories and Subject Descriptors (according to ACM CCS): I.3.5 [Computer Graphics]: Physically based model-ing, I.3.7 [Computer Graphics]: Animation
1. Introduction
The dynamic simulation has become an important area of re-search in computer graphics and has many applications suchas virtual environments, movie special effects and games.Topics like multi-body systems, water simulation and clothsimulation have been researched. The task of simulating de-formable bodies is still a challenging problem, especiallywhen the volume of the body has to be conserved.
In this paper a new method for simulating volume con-serving deformable bodies using an impulse-based approachis presented. The impulse-based dynamic simulation de-scribes a body as a set of particles linked by constraints.These constraints are satisfied by the computation of im-pulses. Constraints can be used to model joints, collisionsand permanent contacts. In this paper the constraints enforcea body to conserve its total volume. Therefore a tetrahedralmesh is built to describe the volume. The tetrahedrons areassigned to constraints which are solved iteratively duringsimulation. The original triangle mesh can be assigned tothe tetrahedral mesh and used for the visualization whilethe tetrahedral mesh is used for the simulation. With theimpulsed-based approach even cyclic dependencies can besolved and no special treatment for the interaction with otherobjects like rigid bodies is needed.
2. Related Work
Since the first general physical model for the simula-tion of two- and three-dimensional deformable objects was
presented [TPBF87], different approaches for simulatingcloth and deformable bodies were studied. In [THMG04]a method for simulating deformable solids was introduced,where triangle and tetrahedral meshes with up to thousandprimitives were simulated at interactive speed. The simula-tion could handle elastic and plastic deformations but couldnot guarantee the conservation of the total volume at eachpoint of time. [MHTG05] showed mesh deformations whereno connectivity is needed. They match a set of moved parti-cles with the original ones by minimizing an energy functionto restore the volume as good as possible. In the area of finiteelement simulation [ISF07] presented an approach adaptedfrom fluid dynamics simulation, where the volume was con-served in a one-ring of tetrahedrons by making the velocitiesdivergence free. The tetrahedral model was generated from alevel set as described in [TMFB05]. The interaction betweenrigid and deformable bodies is presented in [RMSG∗08].More control of the deformations can be achieved by us-ing key frame interpolation as presented in [AOW∗08]. Inthis paper an impulse-based approach is used, because of itsperformance, stability and simplicity [Ben07].
3. Tetrahedral mesh
In order to represent the deformable bodies a volumetricstructure must be created. Tetrahedral meshes are commonlyused for this purpose. Spillmann et. al. [SWT06] presentedan algorithm which creates tetrahedral meshes from arbitrarytriangle soups. Thus, this approach can handle objects wherethe enclosed volume is not defined. We extend their algo-

R. Diziol, J. Bender, D. Bayer / Volume Conserving Simulation of Deformable Bodies
rithm for our purpose to generate the volumetric representa-tion.
The key idea of the approach is to generate a pseudo vol-ume from a triangle mesh. In order to determine the pseudovolume a distance field is computed in the first step. A stan-dard approach as described in [Bær05] is used for this. Thesigns of the distances are determined by casting rays throughthe field. Let the distance field be defined in the axis-alignedbounding box of the mesh subdivided into voxels. The prob-ability
P(x) = 1− c|dmin(x)|
is assigned to each center x of a voxel, where dmin(x) is thedistance from x to the closest surface point and c is a nor-malization parameter so that 0≤ P(x)≤ 1. Each voxel mustbe classified whether it is part of the pseudo volume or not.The classification is made by casting rays from different di-rections through the distance field. For each voxel traversedby a ray the probability P(x) is used to make the decision.The final sign of a voxel is determined by a majority votefrom all rays.
When casting a ray with direction v through the distancefield the probability P(x) is used to check how likely it isthat the ray enters or leaves the pseudo volume. Two userdefined thresholds Pin and Psubs are used to make the deci-sion. The ray enters or leaves the volume if P(x) > Pin and∂P∂v (x) > 0. A subsequent volume change is only reported ifP(x) < Psubs and ∂P
∂v (x) < 0 in the meantime. This gives con-trol to the user to finely adjust the resulting pseudo volume,especially for thin objects as shown in Figure 1. An adequateapproximation of the original triangle mesh is sufficient forour purpose, because the triangles of the original mesh canbe used for the visualization using freeform deformations asdescribed in [MJBF02].
Figure 1: A tree with its different pseudo volumes depend-ing on the user defined thresholds (top) and the resultingtetrahedral models (bottom).
After each voxel is classified whether it is part of the
pseudo volume or not, an uniform lattice with cells is gen-erated onto the distance field, where each cell belonging tothe pseudo volume is subdivided into five tetrahedrons. Acell with volume V lies in the pseudo volume if the pseudodensity
ρ(V ) =m(V )M(V )
is larger than a user defined threshold. M(V ) is the totalnumber of voxels within V and m(V ) is the number of vox-els within the pseudo volume. To avoid small holes at theboundary where no tetrahedrons have yet been generated,cells with more than three adjacent cells already belong-ing to the pseudo volume are iteratively added. After thetetrahedrons are generated, sharp corners must be smoothed.Thus, a second order laplacian filter [DMSB99] with volumepreservation is applied to the surface of the tetrahedral mesh.More symmetrical and smoother results are obtained whenonly considering the vertices in the umbrella operator whichare connected over axis-aligned edges in the unsmoothedtetrahedral mesh. If vertices connected by diagonal edges arealso considered in the umbrella operator, then sharp cornersare smoothed depending on the triangulation of the surface.Symmetrical smoothed models are important for the simu-lation in order to guarantee symmetrical deformations. SeeFigure 2 for the differences between the standard smoothingand our variant. After the computation of the distance fieldthe user can interactively change the resolution of the lattice,the thresholds and smoothing parameters to adjust the modelto his needs. The tetrahedral mesh can be adapted to a coarsemesh like the convex hull as well to a finer detailed mesh byadjusting the parameters of the algorithm.
Figure 2: An object after two smoothing iterations. Consid-ering vertices connected by diagonal edges in the umbrellaoperator (left) results in a less symmetric smoothing com-pared to our variant (right).
4. Volume constraint
After the tetrahedral mesh has been computed each vertexof the mesh gets assigned a particle. The dynamic state ofa particle is defined by its mass m, its position p(t) and itsvelocity v(t). Each cell consisting of five tetrahedrons getsassigned a volume constraint. The volume constraint con-sists of a volume preserving part and 16 springs which areintroduced as external forces. On each edge of the cell and

R. Diziol, J. Bender, D. Bayer / Volume Conserving Simulation of Deformable Bodies
over the diagonals springs are placed as depicted in Figure 3.The springs force the cell to preserve its original form whilethe volume is recovered during a simulation step. Forcingonly one tetrahedron to conserve its volume could result inlocking as stated in [ISF07]. Using five tetrahedrons at oncegives the model enough freedom for deforming.
Figure 3: The volume constraint with its five tetrahedrons,eight particles, and 16 springs. The red springs can havedifferent spring constants from the green ones.
In each simulation step with time step size h the positionsof the particles are integrated according to
vi(t0 +h) = vi(t0)+∫ t0+h
t0
Fext
midt
pi(t0 +h) = pi(t0)+∫ t0+h
t0v(t)dt =: xi (1)
with external forces Fext and masses mi. In order to conservethe initial volume V0 of a cell the volume V (t +h) must sat-isfy the constraint
V (t +h)−V0 = 0 . (2)
Thus, impulses for the eight particles of the cell are com-puted and applied. These impulses are determined by usinga preview of the constraint state. The integrated particle po-sitions x j,xk,xl and xm from Equation 1 are used in a firststep to compute the integrated volumes
Vi(t +h) =16(x j−xm
)((xk−xm)× (xl−xm)) (3)
of each tetrahedron. The volume V (t + h) of a cell is com-puted as the sum ∑
5i=1 Vi(t +h) of the five tetrahedron vol-
umes. Due to the fact, that the integrated volume does notgenerally satisfy Equation 2, the particles have to be movedin a second step. Moving the particles by λ(xi− c) the centerof mass c = 1
8 ∑8i=1 xi is conserved while restoring the initial
volume of the cell. Exploiting the fact, that the resulting vol-ume of a tetrahedron is λ
3Vi(t + h) after the particles havebeen moved, the volume of a cell thus is λ
3∑
5i=1 Vi(t +h).
With Equation 2 it can be seen that choosing λ = 3√
V0V (t+h)
restores the initial volume. Thus, the needed impulses for theparticles are
∆vi =λ−1hmi
(xi− c) , (4)
where mi is the mass and ∆vi is the velocity change of parti-cle i. According to Newton’s second law of motion the con-servation of momentum has to be guaranteed. Equation 4holds this property if the masses of each particle are equal,because
8
∑i=1
λ−1hm
(xi− c) =λ−1hm
8
∑i=1
(xi−
18
8
∑j=1
xj
)= 0 .
We check the sign of Equation 3 while enforcing the volumeconstraint to avoid inverting a tetrahedron. If the sign of thevolume of one tetrahedron is negative, we simply halve thetime step size h as long as no volume is negative and thencompute the constraint with the new time step size. In gen-eral this problem only occurs, if a tetrahedron is not wellshaped or very strong external forces are involved.
The impulse-based simulation corrects the constraints it-eratively until all constraints are satisfied. This process con-verges to the physical correct solution as shown in [SBP05].Collision handling was also integrated using the impulse-based method as described in [BS06].
5. Results
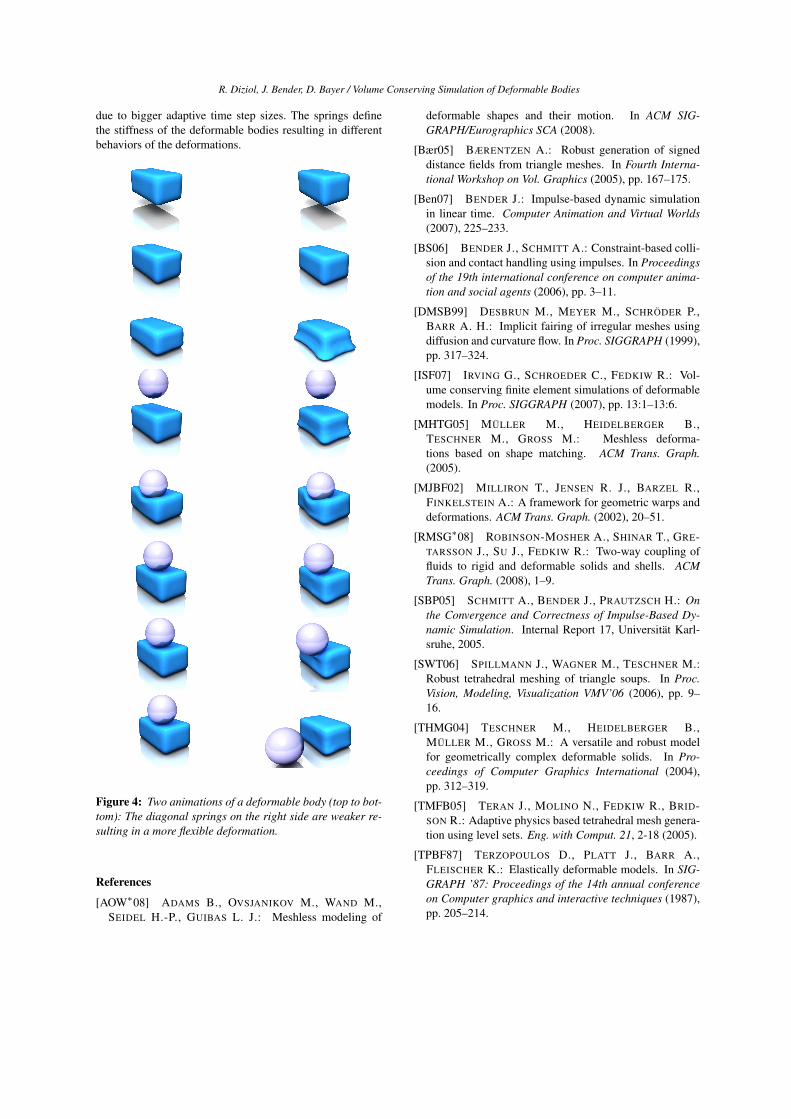
The presented tetrahedral model generation and volume con-straint was implemented in C++. In each simulation step thevolume of the deformable body is conserved. The impulse-based dynamic simulation also allows interaction betweendeformable bodies and rigid bodies. Figure 4 shows two an-imations where a rigid sphere collides with a deformablecube. In the first case we have used strong springs to disal-low strong deformations of the body. The second case showsthe same animation where the diagonal spring constants ofthe cells were set to a low value. Thus, a more flexible de-formation was possible.
6. Conclusion
In this paper a new method for simulating deformable bod-ies with an impulsed-based approach was presented. Thetetrahedral model generation algorithm produces volumet-ric models even when no enclosed volume is defined. Theparameters of the algorithm let the user interactively definedifferent resolutions and appearances of the resulting model.Due to the special smoothing we obtain symmetrical modelswhich are important for symmetric deformations. The tetra-hedral model is used for the simulation while the originaltriangle mesh can be used for the visualization. Taking carein the smoothing process, that the resulting tetrahedrons donot get too small and are well shaped, makes the inversion ofa tetrahedron unlikely, resulting in shorter simulation times
R. Diziol, J. Bender, D. Bayer / Volume Conserving Simulation of Deformable Bodies
due to bigger adaptive time step sizes. The springs definethe stiffness of the deformable bodies resulting in differentbehaviors of the deformations.
Figure 4: Two animations of a deformable body (top to bot-tom): The diagonal springs on the right side are weaker re-sulting in a more flexible deformation.
References
[AOW∗08] ADAMS B., OVSJANIKOV M., WAND M.,SEIDEL H.-P., GUIBAS L. J.: Meshless modeling of
deformable shapes and their motion. In ACM SIG-GRAPH/Eurographics SCA (2008).
[Bær05] BÆRENTZEN A.: Robust generation of signeddistance fields from triangle meshes. In Fourth Interna-tional Workshop on Vol. Graphics (2005), pp. 167–175.
[Ben07] BENDER J.: Impulse-based dynamic simulationin linear time. Computer Animation and Virtual Worlds(2007), 225–233.
[BS06] BENDER J., SCHMITT A.: Constraint-based colli-sion and contact handling using impulses. In Proceedingsof the 19th international conference on computer anima-tion and social agents (2006), pp. 3–11.
[DMSB99] DESBRUN M., MEYER M., SCHRÖDER P.,BARR A. H.: Implicit fairing of irregular meshes usingdiffusion and curvature flow. In Proc. SIGGRAPH (1999),pp. 317–324.
[ISF07] IRVING G., SCHROEDER C., FEDKIW R.: Vol-ume conserving finite element simulations of deformablemodels. In Proc. SIGGRAPH (2007), pp. 13:1–13:6.
[MHTG05] MÜLLER M., HEIDELBERGER B.,TESCHNER M., GROSS M.: Meshless deforma-tions based on shape matching. ACM Trans. Graph.(2005).
[MJBF02] MILLIRON T., JENSEN R. J., BARZEL R.,FINKELSTEIN A.: A framework for geometric warps anddeformations. ACM Trans. Graph. (2002), 20–51.
[RMSG∗08] ROBINSON-MOSHER A., SHINAR T., GRE-TARSSON J., SU J., FEDKIW R.: Two-way coupling offluids to rigid and deformable solids and shells. ACMTrans. Graph. (2008), 1–9.
[SBP05] SCHMITT A., BENDER J., PRAUTZSCH H.: Onthe Convergence and Correctness of Impulse-Based Dy-namic Simulation. Internal Report 17, Universität Karl-sruhe, 2005.
[SWT06] SPILLMANN J., WAGNER M., TESCHNER M.:Robust tetrahedral meshing of triangle soups. In Proc.Vision, Modeling, Visualization VMV’06 (2006), pp. 9–16.
[THMG04] TESCHNER M., HEIDELBERGER B.,MÜLLER M., GROSS M.: A versatile and robust modelfor geometrically complex deformable solids. In Pro-ceedings of Computer Graphics International (2004),pp. 312–319.
[TMFB05] TERAN J., MOLINO N., FEDKIW R., BRID-SON R.: Adaptive physics based tetrahedral mesh genera-tion using level sets. Eng. with Comput. 21, 2-18 (2005).
[TPBF87] TERZOPOULOS D., PLATT J., BARR A.,FLEISCHER K.: Elastically deformable models. In SIG-GRAPH ’87: Proceedings of the 14th annual conferenceon Computer graphics and interactive techniques (1987),pp. 205–214.