vtu-nptel-nmeict project progress reportnptel.vtu.ac.in/vtu-nmeict/mv/module 2.pdfmodule-ii ---...
TRANSCRIPT
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
VTU-NPTEL-NMEICT Project Progress Report
The Project on Development of Remaining Three Quadrants to NPTEL Phase-I under grant in aid NMEICT, MHRD, New Delhi
DEPARTMENT OF MECHANICAL ENGINEERING, GHOUSIA COLLEGE OF ENGINEERING,
RAMANARAM -562159
Subject Matter Expert Details
SME Name : Dr.MOHAMED HANEEF
PRINCIPAL, VTU SENATE MEMBER
Course Name:
Vibration engineering
Type of the Course
web
Module
II
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 1 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
CONTENTS
Sl. No. DISCRETION
1. Lecture Notes (Single-DOF free Vibration).
2. Quadrant -2
a. Animations.
b. Videos.
c. Illustrations.
3. Quadrant -3
a. Wikis.
b. Open Contents
4. Quadrant -4
a. Problems.
b. Assignments
c. Self Assigned Q & A.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 2 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
MODULE-II SINGLE DEGREE OF FREEDOM, FREE VIBRATION
1.LECTURE NOTES
SINGLE DEGREE OF FREE VIBRATIONS Un-damped Free Vibrations of Single Degree of Freedom Systems
When the elastic system vibrate because of inherent forces and no external forces is included,
it is called free vibration. If during vibrations there is no loss of energy due to friction or
resistance it is known as undamped vibration, free vibrations which occur in absence of external
force are easy to analyse for single degree of freedom systems.
A vibratory system having mass and elasticity with single degree of freedom in the simplest
case to analyse. The determination of natural frequency to avoid resonance is essential in
machine elements.
Module-II is define the following
i. Vibration model, Equation of motion-natural frequency. ii. Energy method, Rayleigh method. iii. Principle of virtual work, damping models.
2.1. VIBRATION MODEL, EQUATION OF MOTION-NATURAL FREQUENCY
2.1. i. Spring mass system displaced vertically.
a) VIBRATION MODEL:
Consider a spring mass system as shown in fig constrained to move in a collinear manner
along with the axis of spring. The spring having stiffness is fixed at one end and carries a mass m
at its free end. The body is displaced from its equilibrium position vertically downwards. This
equilibrium position is called static equilibrium.
The free body diagram of the system is shown in fig: 2.1 (a).
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 3 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
Fig (a): Spring mass system
Fig (b): Free body diagram of spring mass system
Figure: 2.1 (a)
b) EQUATION OF MOTION:
In equilibrium position, the gravitational pull mg is balanced by a spring force such that
𝑚𝑔 = kδ [𝐹𝑟𝑜𝑚 𝑓𝑖𝑔: 2.1 (𝑏)]
Where δ is the static deflection of the spring. Since the mass is displaced from its equilibrium
position by a distance x and then released, so after time t as per Newton’s II law.
𝑁𝑒𝑡 𝐹𝑜𝑟𝑐𝑒 = 𝑚𝑎𝑠𝑠 × 𝑎𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛
𝑚𝑔 – 𝑘 (𝛿 + 𝑥) = 𝑚 �̈� [equation of motion ]
𝑚 �̈� = 𝑚𝑔 − 𝑘𝛿 − 𝑘𝑥 (:− mg = k δ)
𝑚 �̈� = −𝑘𝑥
𝑚 �̈� + 𝑘𝑥 = 0
𝑥 + ( 𝑘 /𝑚) �̈� = 0 −−−−− (1)
Eq. (1) is differential Equation of motion for free vibration
c) NATURAL FREQUENCY
Equation (1) is a differential equation. The solution of which is
𝑥 = 𝐴 𝑠𝑖𝑛 �𝐾/𝑚 𝑡 + 𝐵 𝑐𝑜𝑠�𝐾/𝑚 𝑡. Where A & B are constant which can be found from
initial conditions.
The circular frequency 𝜔𝑛 = � 𝑘/𝑚
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 4 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
The natural frequency of vibration ƒ𝑛 = 𝜔𝑛2𝜋� R
ƒ𝑛 = 1
2 𝜋 �𝑘 /𝑚 =
12 𝜋
� 𝑘 (𝑘𝛿/𝑔)� = 1
2 𝜋 �
𝑔𝛿
Where δ = static deflection
2.1. ii. Spring mass system displaced horizontally.
a) VIBRATION MODEL:
In the system shown in fig: 2.2, a body of mass m is free to move on a fixed horizontal
surface. The mass is supported on frictionless rollers. The spring of stiffness is attached to a
fixed frame at one side and to mass at other side.
Figure: 2.1 (b)
b) EQUATION OF MOTION:
As per Newtons II law
Mass x acceleration = resultant force on mass
𝑚 �̈� = − 𝑘𝑥
𝑚 �̈� + 𝑘𝑥 = 0 [equation of motion ]
�̈� + (𝑘 /𝑚) 𝑥 = 0 −−−−(1)
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 5 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
Eq. (1) is differential Equation of motion for free vibration
c) NATURAL FREQUENCY:
Equation (1) is a differential equation. The solution of which is
𝑥 = 𝐴 𝑠𝑖𝑛 ��𝐾/𝑚 �𝑡 + 𝐵 𝑐𝑜𝑠��𝐾/𝑚� 𝑡. Where A & B are constant which can be found from
initial conditions.
The circular frequency 𝜔𝑛 = � 𝑘/𝑚
The natural frequency of vibration, ƒ𝑛 = 𝜔𝑛2𝜋� R
ƒ𝑛 = 1
2 𝜋 �𝑘 /𝑚 =
12 𝜋
� 𝑘 (𝑘𝛿/𝑔)� = 𝟏𝟐 𝝅
� 𝒈𝜹
Where δ = static deflection
2.1. iii. System having a rotor of mass (Torsional Vibrations)
a) VIBRATION MODEL:
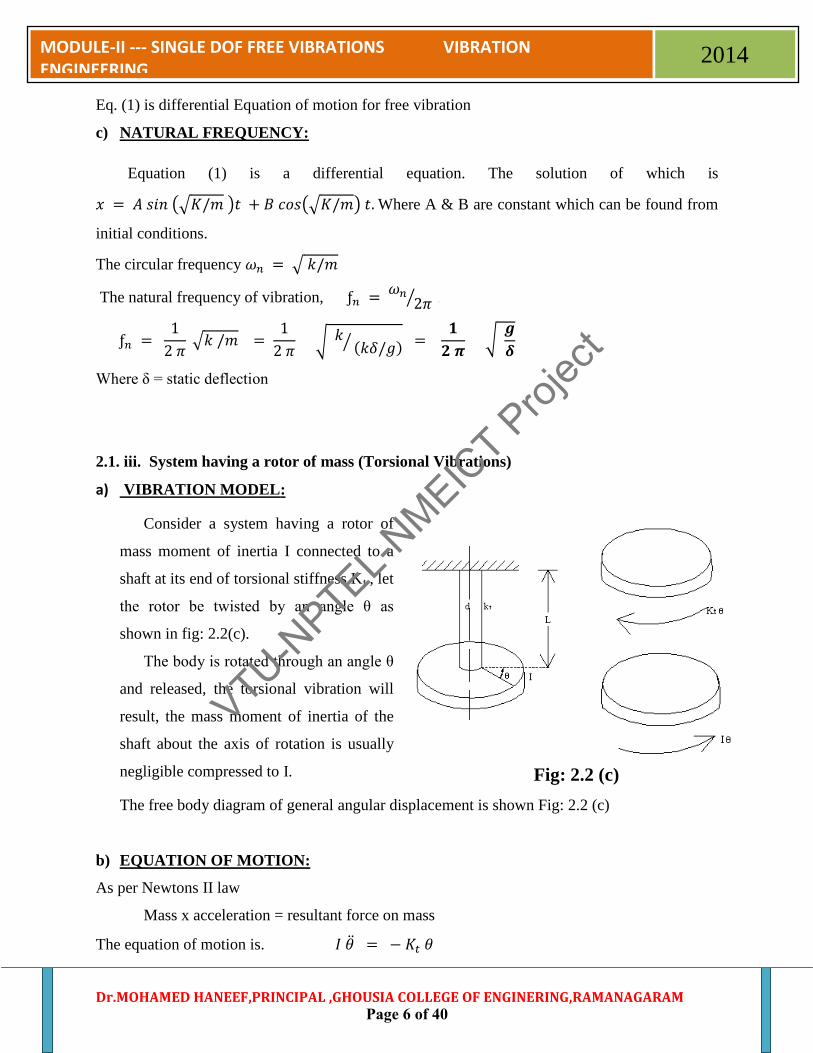
Consider a system having a rotor of
mass moment of inertia I connected to a
shaft at its end of torsional stiffness Kt , let
the rotor be twisted by an angle θ as
shown in fig: 2.2(c).
The body is rotated through an angle θ
and released, the torsional vibration will
result, the mass moment of inertia of the
shaft about the axis of rotation is usually
negligible compressed to I.
Fig: 2.2 (c) The free body diagram of general angular displacement is shown Fig: 2.2 (c)
b) EQUATION OF MOTION:
As per Newtons II law
Mass x acceleration = resultant force on mass
The equation of motion is. 𝐼 �̈� = − 𝐾𝑡 𝜃
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 6 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
𝐼 �̈� + 𝐾𝑡 𝜃 = 0
�̈� + � 𝐾𝑡𝐼� 𝜃 = 0
c) NATURAL FREQUENCY:
Equation (1) is a differential equation. The solution of which is
𝑥 = 𝐴 𝑠𝑖𝑛 �� 𝐾𝑡𝐼
� 𝑡 + 𝐵 𝑐𝑜𝑠 �� 𝐾𝑡𝐼� 𝑡. Where A & B are constant which can be found from
initial conditions.
The circular frequency 𝜔𝑛 = � 𝐾𝑡𝐼
The natural frequency of vibration, ƒ𝑛 = 𝜔𝑛2𝜋�
𝜔𝑛 = � 𝐾𝑡𝐼
& 𝑓𝑛 =1
2𝜋� 𝐾𝑡𝐼
Where 𝐾𝑡 = 𝐺𝐽𝐿
; 𝐽 = 𝜋 𝑑3
32
SPRINGS IN ARBITRARY DIRECTION
Fig shows a spring K making an angle α with the direction of motion of the mass m.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 7 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
If the mass is displaced by x, the spring is deformed by an amount 𝑥𝑐𝑜𝑠𝛼 along its axis
(spring Axis). The force along the spring axis is 𝑘𝑥 𝑐𝑜𝑠 𝛼. The component of this force along the
direction of motion of the mass is 𝑘𝑥 𝑐𝑜𝑠2 𝛼. The equation of motion of the mass m is
𝑚𝑥 + (𝑘𝑐𝑜𝑠2 𝛼) �̈� = 0.
From the above equation it may be noted that the equivalent stiffness 𝐾𝑒 of a spring making
angle-α with the axis of motion is 𝐾𝑒 = 𝐾 𝑐𝑜𝑠2 𝛼.
EQUIVALENT SHIFTNESS OF SPRING COMBINATIONS
Certain systems have more than one spring. The springs are joined in series or parallel or both.
They can be replaced by a single spring of the same shiftness as they all show the same shiftness
jointly.
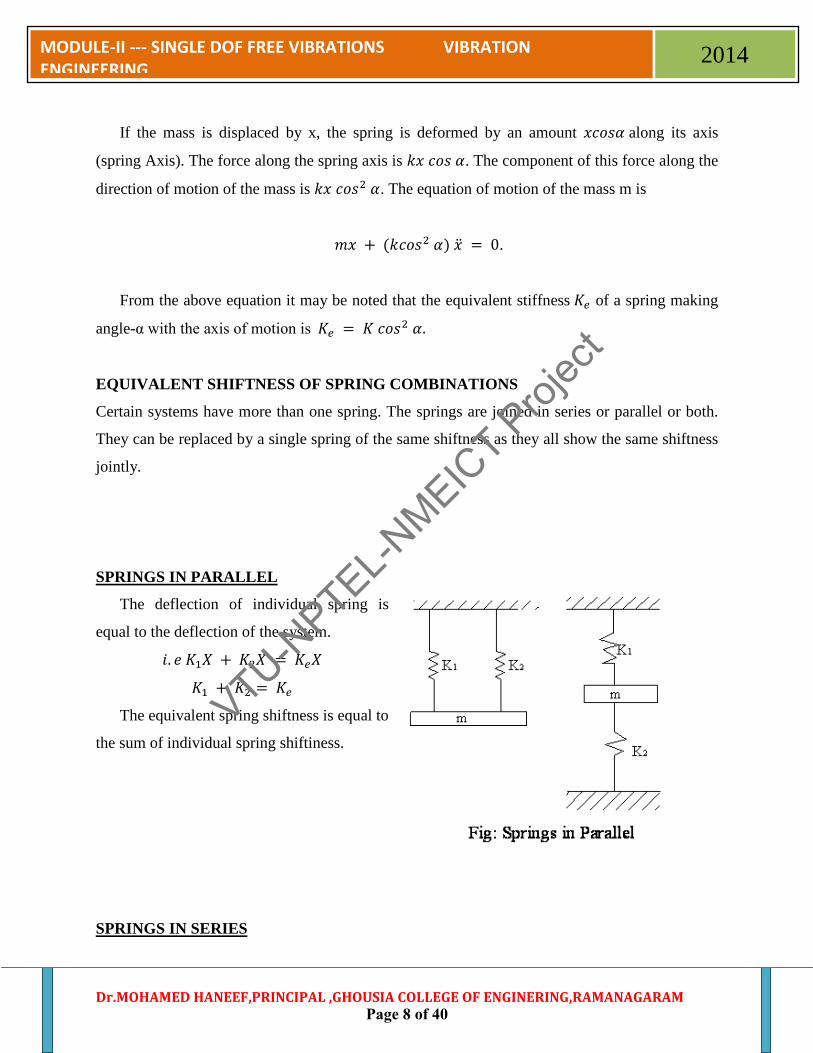
SPRINGS IN PARALLEL
The deflection of individual spring is
equal to the deflection of the system.
𝑖. 𝑒 𝐾1𝑋 + 𝐾2𝑋 = 𝐾𝑒𝑋
𝐾1 + 𝐾2 = 𝐾𝑒
The equivalent spring shiftness is equal to
the sum of individual spring shiftiness.
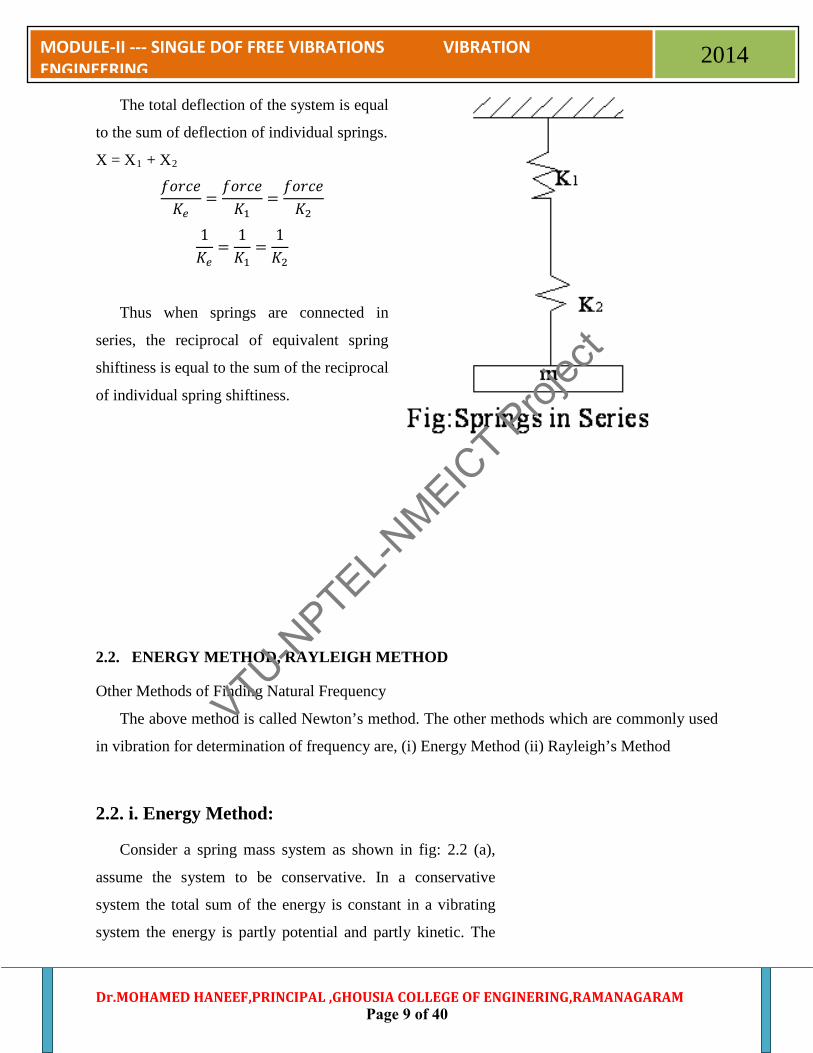
SPRINGS IN SERIES
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 8 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
The total deflection of the system is equal
to the sum of deflection of individual springs.
X = X1 + X2
𝑓𝑜𝑟𝑐𝑒𝐾𝑒
=𝑓𝑜𝑟𝑐𝑒𝐾1
=𝑓𝑜𝑟𝑐𝑒𝐾2
1𝐾𝑒
=1𝐾1
=1𝐾2
Thus when springs are connected in
series, the reciprocal of equivalent spring
shiftiness is equal to the sum of the reciprocal
of individual spring shiftiness.
2.2. ENERGY METHOD, RAYLEIGH METHOD
Other Methods of Finding Natural Frequency
The above method is called Newton’s method. The other methods which are commonly used
in vibration for determination of frequency are, (i) Energy Method (ii) Rayleigh’s Method
2.2. i. Energy Method:
Consider a spring mass system as shown in fig: 2.2 (a),
assume the system to be conservative. In a conservative
system the total sum of the energy is constant in a vibrating
system the energy is partly potential and partly kinetic. The
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 9 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
K.E, T is because of velocity of the mass and Potential energy
V is stored in the spring because of its elastic deformation
As per conservation law of energy.
Fig:2.2 (c)
T + V = constant
Differentiating the above equation w.r.t. ‘t’
𝑑𝑑𝑡
(𝑇 + 𝑉) = 0
For a spring mass system shown
𝐾.𝐸 = 𝑇 = ½ 𝑚�̇�2
𝑃.𝐸 = 𝑉 = ½ 𝑘𝑥2 𝒅𝒅𝒕
(½ 𝑚�̇�2 + ½ 𝑘𝑥2) = 0
𝒅𝒅𝒕
( 𝑚�̇�2 + 𝑘𝑥2) = 0
𝑚 x x + 𝑘𝑥 x = 0
�̈� + (𝑘/𝑚) 𝑥 = 0
Hence the natural frequency is
𝜔𝑛 = � 𝑘/𝑚 ƒ𝑛 = 1 /2𝜋 �𝑘/𝑚 = 1/ 2𝜋 �𝑔 / 𝛿
2.2. ii. Rayleigh’s Method:
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 10 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
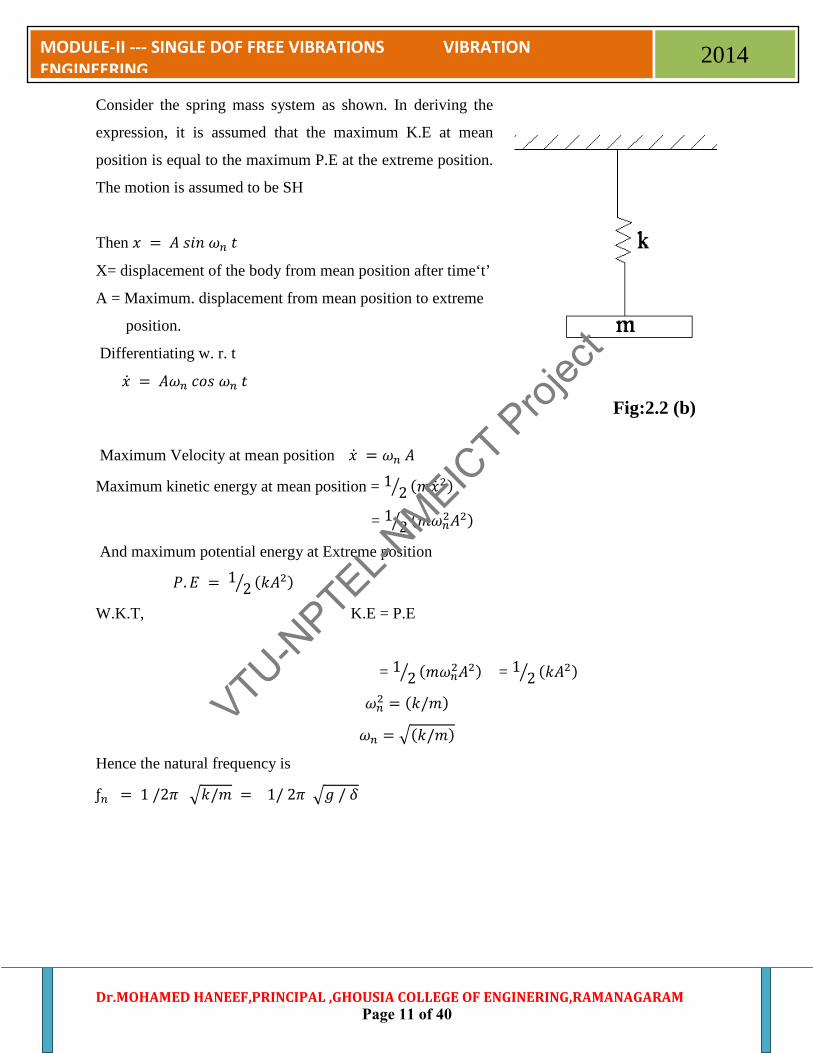
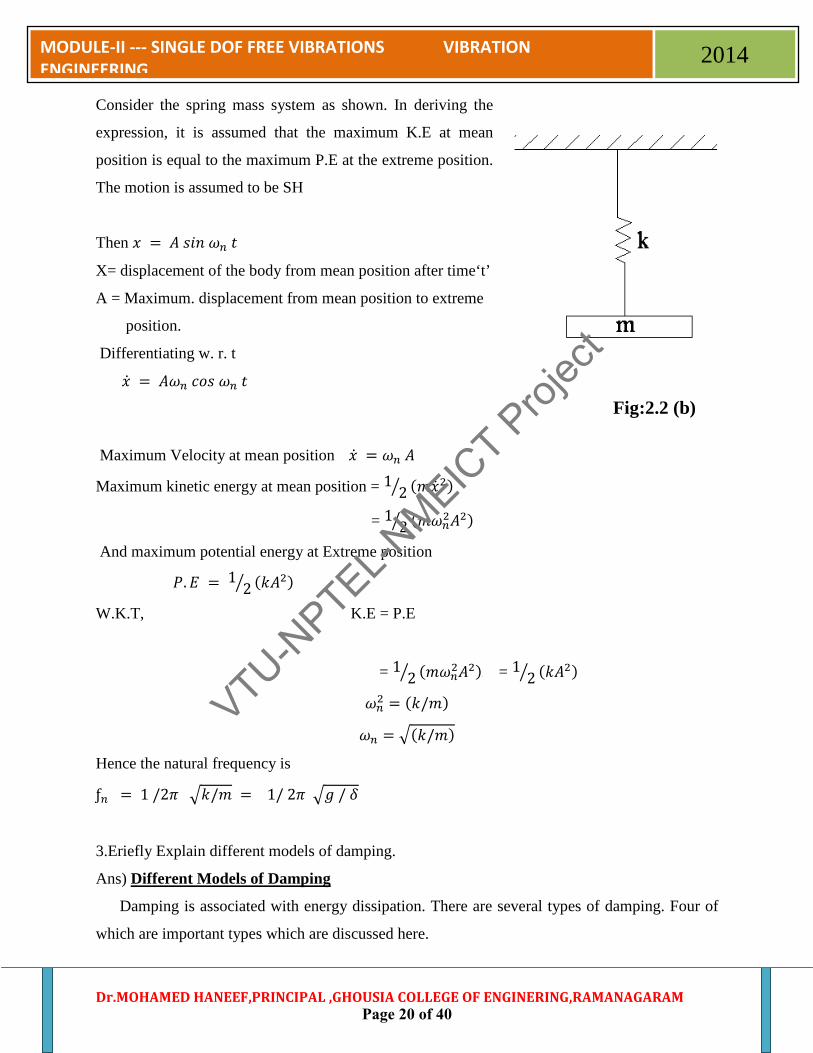
Consider the spring mass system as shown. In deriving the
expression, it is assumed that the maximum K.E at mean
position is equal to the maximum P.E at the extreme position.
The motion is assumed to be SH
Then 𝑥 = 𝐴 𝑠𝑖𝑛 𝜔𝑛 𝑡
X= displacement of the body from mean position after time‘t’
A = Maximum. displacement from mean position to extreme
position.
Differentiating w. r. t
�̇� = 𝐴𝜔𝑛 𝑐𝑜𝑠 𝜔𝑛 𝑡
Fig:2.2 (b)
Maximum Velocity at mean position �̇� = 𝜔𝑛 𝐴
Maximum kinetic energy at mean position = 1 2� (𝑚�̇�2)
= 1 2� (𝑚𝜔𝑛2𝐴2)
And maximum potential energy at Extreme position
𝑃.𝐸 = 12� (𝑘𝐴2)
W.K.T, K.E = P.E
= 1 2� (𝑚𝜔𝑛2𝐴2)P
= 1 2� (𝑘𝐴2)
𝜔𝑛2 = (𝑘/𝑚)
𝜔𝑛 = �(𝑘/𝑚)
Hence the natural frequency is
ƒ𝑛 = 1 /2𝜋 �𝑘/𝑚 = 1/ 2𝜋 �𝑔 / 𝛿
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 11 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
2.3. PRINCIPLE OF VIRTUAL WORK, DAMPING MODELS
2.3. i. PRINCIPLE OF VIRTUAL WORK:
The virtual work method is another scalar method besides the work and energy method. It is
useful especially for systems of interconnected bodies of higher DOF.
The principle of virtual work states that If a system in equilibrium under the action of a set of
forces is given a virtual displacement, the virtual work done by the forces will be zero. In other
words
(1) 𝛿𝑊 = 0 For static equilibrium.
𝛿𝑊 = 𝛿𝑊 + 𝛿𝑊inertia for dynamic equilibrium.
(2) Virtual displacements should satisfy the displacement boundary conditions. It will be
shown that these conditions are not crucial. Virtual displacement: imaginary (not real)
displacement
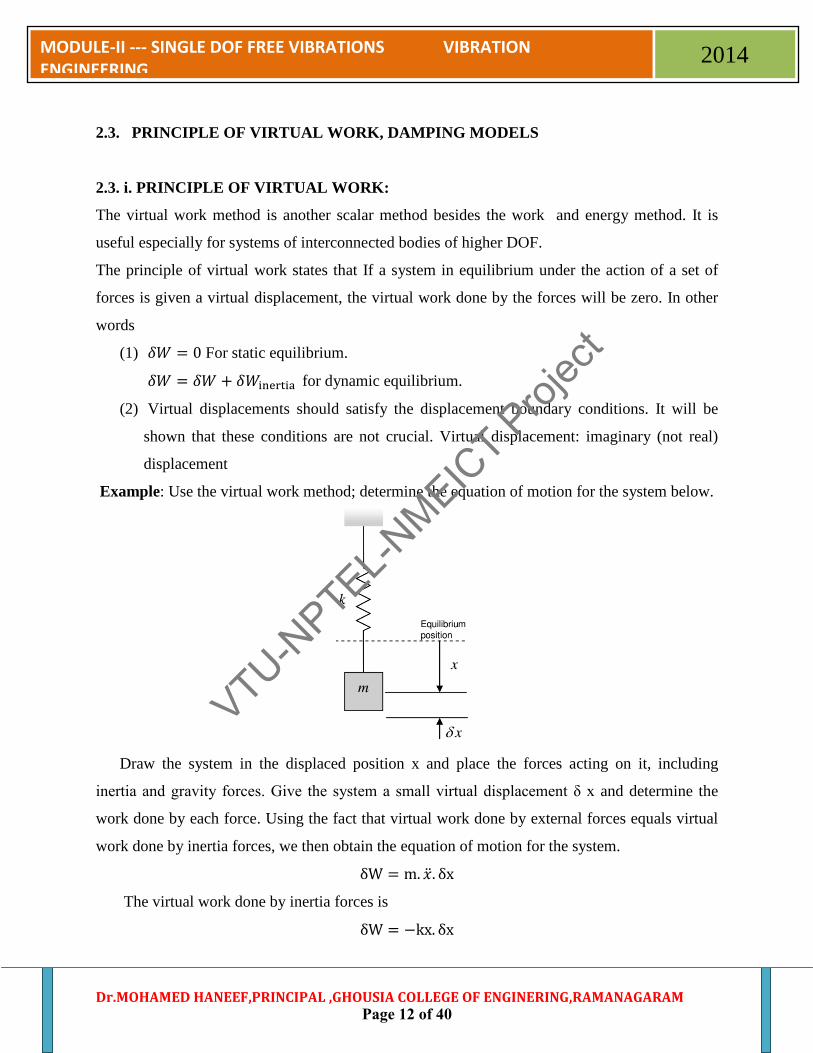
Example: Use the virtual work method; determine the equation of motion for the system below.
Draw the system in the displaced position x and place the forces acting on it, including
inertia and gravity forces. Give the system a small virtual displacement δ x and determine the
work done by each force. Using the fact that virtual work done by external forces equals virtual
work done by inertia forces, we then obtain the equation of motion for the system.
δW = m. �̈�. δx
The virtual work done by inertia forces is
δW = −kx. δx
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 12 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
Equating the two quantities above and canceling δ x, we have the equation of motion
m. �̈� + kx = 0
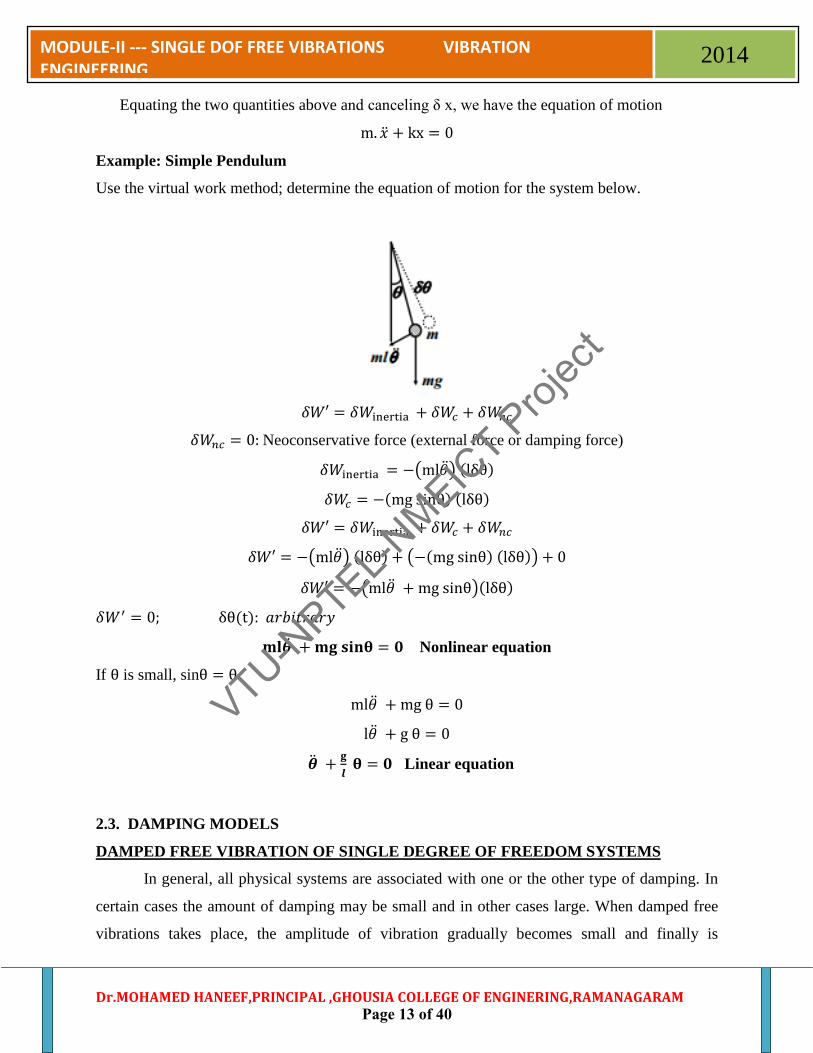
Example: Simple Pendulum
Use the virtual work method; determine the equation of motion for the system below.
𝛿𝑊′ = 𝛿𝑊inertia + 𝛿𝑊𝑐 + 𝛿𝑊𝑛𝑐
𝛿𝑊𝑛𝑐 = 0: Neoconservative force (external force or damping force)
𝛿𝑊inertia = −�ml�̈�� (lδθ)
𝛿𝑊𝑐 = −(mg sinθ) (lδθ)
𝛿𝑊′ = 𝛿𝑊inertia + 𝛿𝑊𝑐 + 𝛿𝑊𝑛𝑐
𝛿𝑊′ = −�ml�̈�� (lδθ) + �−(mg sinθ) (lδθ)� + 0
𝛿𝑊′ = −�ml�̈� + mg sinθ�(lδθ)
𝛿𝑊′ = 0; δθ(t): 𝑎𝑟𝑏𝑖𝑡𝑟𝑎𝑟𝑦
𝐦𝐥�̈� + 𝐦𝐠 𝐬𝐢𝐧𝛉 = 𝟎 Nonlinear equation
If θ is small, sinθ = θ
ml�̈� + mg θ = 0
l�̈� + g θ = 0
�̈� + 𝐠𝒍
𝛉 = 𝟎 Linear equation
2.3. DAMPING MODELS
DAMPED FREE VIBRATION OF SINGLE DEGREE OF FREEDOM SYSTEMS
In general, all physical systems are associated with one or the other type of damping. In
certain cases the amount of damping may be small and in other cases large. When damped free
vibrations takes place, the amplitude of vibration gradually becomes small and finally is
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 13 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
completely lost. The rate, at which the amplitude decays, depends upon the type and amount of
damping in the system. The aspects we are primary interested in damped free vibrations are 1)
the frequency of damped oscillations 2) the rate of decay
Different Models of Damping
Damping is associated with energy dissipation. There are several types of damping. Four of
which are important types which are discussed here.
1) Viscous damping
2) Coulomb damping
3) Structural damping or solid damping
4) Slip or Interfacial damping
Viscous Damping: Viscous damping is encountered by bodies moving at moderate speed
through a liquid. This type of damping leads to a resisting force proportional to the velocity. The
damping force.
𝐹𝑑 𝛼 𝑑𝑥𝑑𝑡
𝐹𝑑 = 𝑐�̇�
When ‘c’ is the constant of proportionality and is called viscous damping Co-efficient with the
dimension of N-s/m.
Coulomb Damping: - This type of damping arises from sliding of dry surfaces. The friction
force is nearly constant and depends upon the nature of sliding surface and normal pressure
between them as expressed by the equation of kinetic friction.
F = µ N
When µ = co- efficient of friction
N = normal force
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 14 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
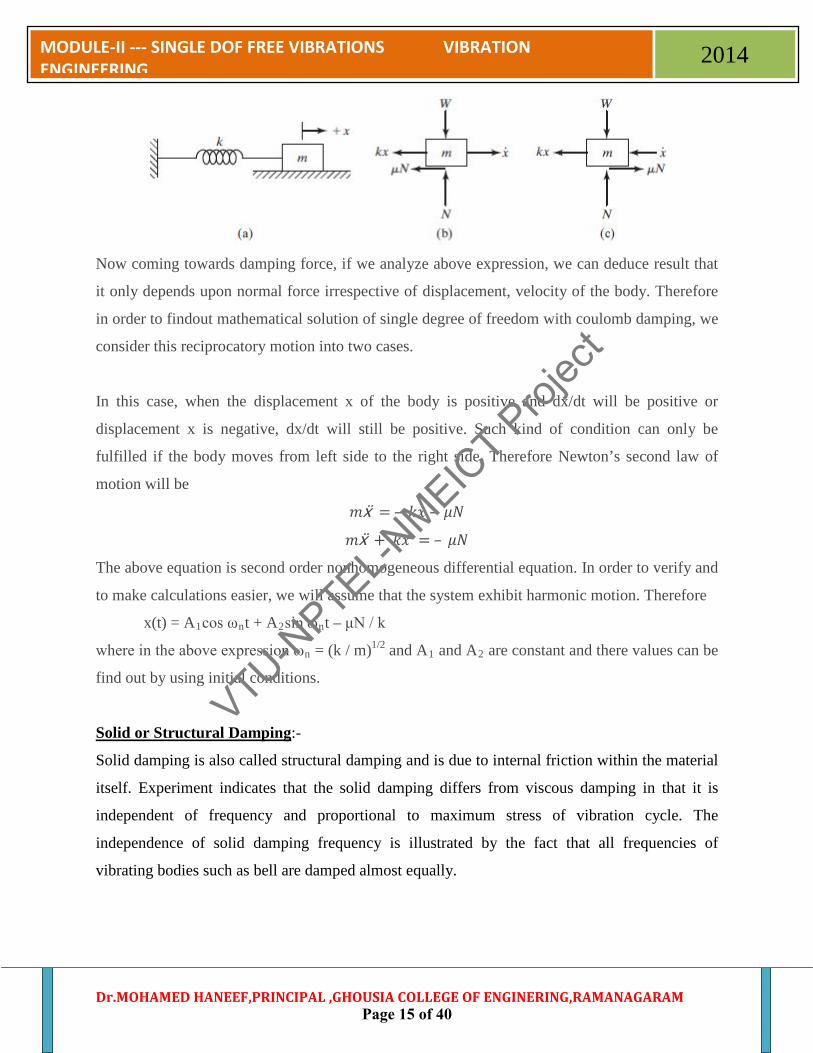
Now coming towards damping force, if we analyze above expression, we can deduce result that
it only depends upon normal force irrespective of displacement, velocity of the body. Therefore
in order to findout mathematical solution of single degree of freedom with coulomb damping, we
consider this reciprocatory motion into two cases.
In this case, when the displacement x of the body is positive and dx/dt will be positive or
displacement x is negative, dx/dt will still be positive. Such kind of condition can only be
fulfilled if the body moves from left side to the right side. Therefore Newton’s second law of
motion will be
𝑚ẍ = – 𝑘𝑥 – 𝜇𝑁
𝑚ẍ + 𝑘𝑥 = – 𝜇𝑁
The above equation is second order nonhomogeneous differential equation. In order to verify and
to make calculations easier, we will assume that the system exhibit harmonic motion. Therefore
x(t) = A1cos ωnt + A2sin ωnt – μN / k
where in the above expression ωn = (k / m)1/2 and A1 and A2 are constant and there values can be
find out by using initial conditions.
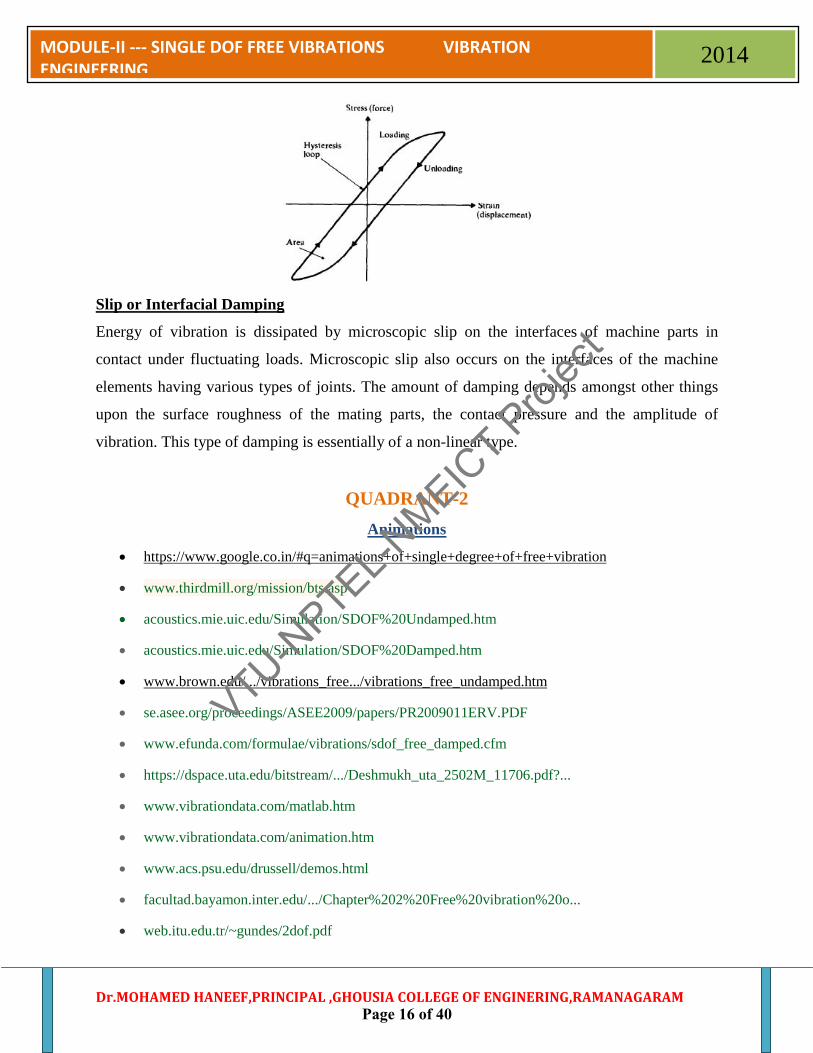
Solid or Structural Damping:-
Solid damping is also called structural damping and is due to internal friction within the material
itself. Experiment indicates that the solid damping differs from viscous damping in that it is
independent of frequency and proportional to maximum stress of vibration cycle. The
independence of solid damping frequency is illustrated by the fact that all frequencies of
vibrating bodies such as bell are damped almost equally.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 15 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
Slip or Interfacial Damping
Energy of vibration is dissipated by microscopic slip on the interfaces of machine parts in
contact under fluctuating loads. Microscopic slip also occurs on the interfaces of the machine
elements having various types of joints. The amount of damping depends amongst other things
upon the surface roughness of the mating parts, the contact pressure and the amplitude of
vibration. This type of damping is essentially of a non-linear type.
QUADRANT-2 Animations
• https://www.google.co.in/#q=animations+of+single+degree+of+free+vibration
• www.thirdmill.org/mission/bts.asp
• acoustics.mie.uic.edu/Simulation/SDOF%20Undamped.htm
• acoustics.mie.uic.edu/Simulation/SDOF%20Damped.htm
• www.brown.edu/.../vibrations_free.../vibrations_free_undamped.htm
• se.asee.org/proceedings/ASEE2009/papers/PR2009011ERV.PDF
• www.efunda.com/formulae/vibrations/sdof_free_damped.cfm
• https://dspace.uta.edu/bitstream/.../Deshmukh_uta_2502M_11706.pdf?...
• www.vibrationdata.com/matlab.htm
• www.vibrationdata.com/animation.htm
• www.acs.psu.edu/drussell/demos.html
• facultad.bayamon.inter.edu/.../Chapter%202%20Free%20vibration%20o...
• web.itu.edu.tr/~gundes/2dof.pdf
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 16 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
Videos www.youtube.com/watch?v=vBLuOXBfzJk
www.youtube.com/watch?v=PfxlTw3BS7g
www.youtube.com/watch?v=bDa8Ghm9aRw
ww.youtube.com/watch?v=_Rn68hC4rlc
www.youtube.com/watch?v=JZWf2sdKhS8
www.youtube.com/watch?v=PsXLBphWNuE
www.youtube.com/watch?v=DErLaGaJ1d0
www.youtube.com/watch?v=RKfZ081epsM
www.youtube.com/watch?v=MUWI-yi9Y2s
www.youtube.com/watch?v=DdkIai5oQtU www.youtube.com/watch?v=V_Lj4Pun_WM
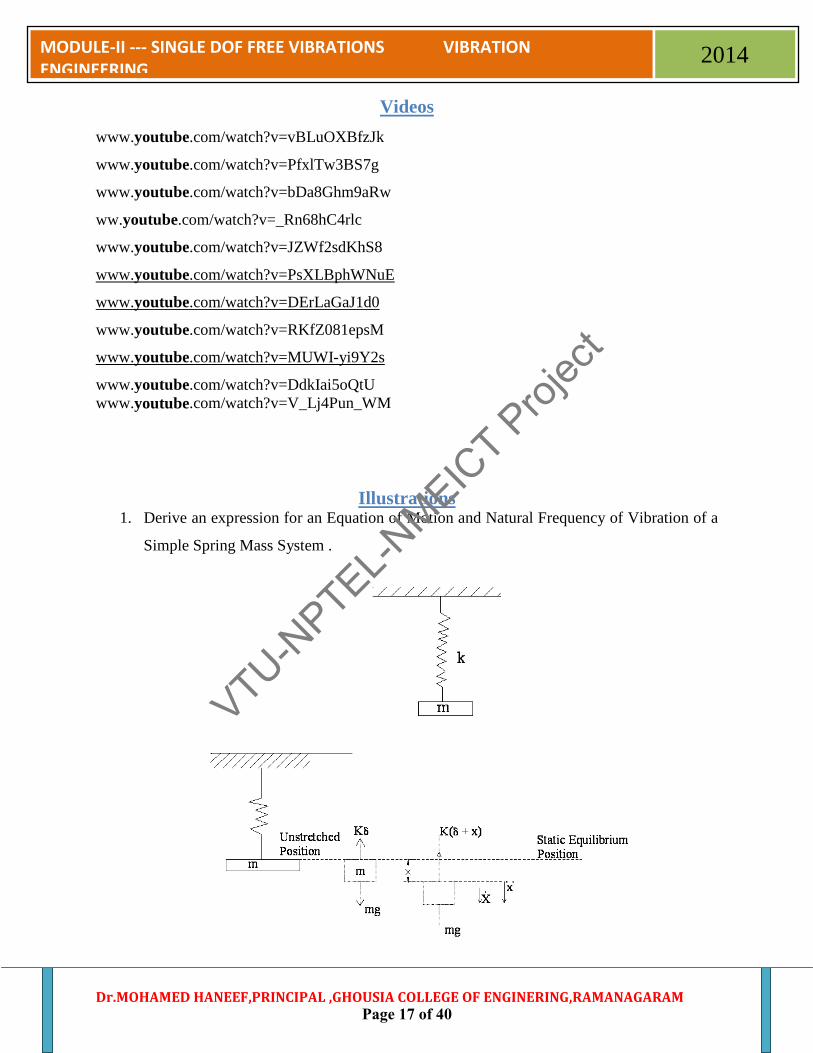
Illustrations 1. Derive an expression for an Equation of Motion and Natural Frequency of Vibration of a
Simple Spring Mass System .
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 17 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
Consider a spring mass system as shown in fig constrained to move in a collinear manner along
with the axis of spring. The spring having stiffness is fixed at one end and carries a mass m at its
free end. The body is displaced from its equilibrium position vertically downwards. This
equilibrium position is called static equilibrium.
The free body dia of the system is shown in fig.
In equilibrium position, the gravitational pull mg is balanced by a spring force such that
mg = kδ.
Where δ is the static deflection of the spring. Since the mass is displaced from its equilibrium
position by a distance x and then released, so after time t as per Newton’s II law.
Net Force = mass x acceleration
mg – k (δ + x) = m x
m x = mg - kδ - kx (:- mg = k δ)
m x = -kx
m x + kx = 0
x + k /m x = 0 ----- (1)
Equation (1) is a differential equation. The solution of which is x = A sin √K/m t +
B cos√K/m t. Where A and B are constant which can be found from initial conditions.
The circular frequency ωn = √ k/m
The natural frequency of vibration ƒn = ωn /2
ƒn = 1 /2 π √k /m = 1/2 π √ k / kδ/g = 1 / 2 π √g / δ
Where δ = static deflection 2) Explain a) Energy method b) Rayliegh Ritz method of finding Natural Frquency.
Ans)
a) Energy Method:
Consider a spring mass system as shown in fig: 2.2 (a),
assume the system to be conservative. In a conservative
system the total sum of the energy is constant in a vibrating
system the energy is partly potential and partly kinetic. The
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 18 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
K.E, T is because of velocity of the mass and Potential energy
V is stored in the spring because of its elastic deformation
As per conservation law of energy.
Fig:2.2 (c)
T + V = constant
Differentiating the above equation w.r.t. ‘t’
𝑑𝑑𝑡
(𝑇 + 𝑉) = 0
For a spring mass system shown
𝐾.𝐸 = 𝑇 = ½ 𝑚�̇�2
𝑃.𝐸 = 𝑉 = ½ 𝑘𝑥2 𝒅𝒅𝒕
(½ 𝑚�̇�2 + ½ 𝑘𝑥2) = 0
𝒅𝒅𝒕
( 𝑚�̇�2 + 𝑘𝑥2) = 0
𝑚 x x + 𝑘𝑥 x = 0
�̈� + (𝑘/𝑚) 𝑥 = 0
Hence the natural frequency is
𝜔𝑛 = � 𝑘/𝑚 ƒ𝑛 = 1 /2𝜋 �𝑘/𝑚 = 1/ 2𝜋 �𝑔 / 𝛿
b) Rayleigh’s Method:
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 19 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
Consider the spring mass system as shown. In deriving the
expression, it is assumed that the maximum K.E at mean
position is equal to the maximum P.E at the extreme position.
The motion is assumed to be SH
Then 𝑥 = 𝐴 𝑠𝑖𝑛 𝜔𝑛 𝑡
X= displacement of the body from mean position after time‘t’
A = Maximum. displacement from mean position to extreme
position.
Differentiating w. r. t
�̇� = 𝐴𝜔𝑛 𝑐𝑜𝑠 𝜔𝑛 𝑡
Fig:2.2 (b)
Maximum Velocity at mean position �̇� = 𝜔𝑛 𝐴
Maximum kinetic energy at mean position = 1 2� (𝑚�̇�2)
= 1 2� (𝑚𝜔𝑛2𝐴2)
And maximum potential energy at Extreme position
𝑃.𝐸 = 12� (𝑘𝐴2)
W.K.T, K.E = P.E
= 1 2� (𝑚𝜔𝑛2𝐴2)P
= 1 2� (𝑘𝐴2)
𝜔𝑛2 = (𝑘/𝑚)
𝜔𝑛 = �(𝑘/𝑚)
Hence the natural frequency is
ƒ𝑛 = 1 /2𝜋 �𝑘/𝑚 = 1/ 2𝜋 �𝑔 / 𝛿
3.Eriefly Explain different models of damping.
Ans) Different Models of Damping
Damping is associated with energy dissipation. There are several types of damping. Four of
which are important types which are discussed here.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 20 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
5) Viscous damping
6) Coulomb damping
7) Structural damping or solid damping
8) Slip or Interfacial damping
Viscous Damping: Viscous damping is encountered by bodies moving at moderate speed
through a liquid. This type of damping leads to a resisting force proportional to the velocity. The
damping force.
𝐹𝑑 𝛼 𝑑𝑥𝑑𝑡
𝐹𝑑 = 𝑐�̇�
When ‘c’ is the constant of proportionality and is called viscous damping Co-efficient with the
dimension of N-s/m.
Coulomb Damping: - This type of damping arises from sliding of dry surfaces. The friction
force is nearly constant and depends upon the nature of sliding surface and normal pressure
between them as expressed by the equation of kinetic friction.
F = µ N
When µ = co- efficient of friction
N = normal force
4) Explian the principle of Virtual Work.And derive an expression for equation of Motion for a
spring Mass System and Simple Pendulam.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 21 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
Ans)
Draw the system in the displaced position x and place the forces acting on it, including
inertia and gravity forces. Give the system a small virtual displacement δ x and determine the
work done by each force. Using the fact that virtual work done by external forces equals virtual
work done by inertia forces, we then obtain the equation of motion for the system.
δW = m. �̈�. δx
The virtual work done by inertia forces is
δW = −kx. δx
Equating the two quantities above and canceling δ x, we have the equation of motion
m. �̈� + kx = 0
Example: Simple Pendulum
Use the virtual work method; determine the equation of motion for the system below.
𝛿𝑊′ = 𝛿𝑊inertia + 𝛿𝑊𝑐 + 𝛿𝑊𝑛𝑐
𝛿𝑊𝑛𝑐 = 0: Neoconservative force (external force or damping force)
𝛿𝑊inertia = −�ml�̈�� (lδθ)
𝛿𝑊𝑐 = −(mg sinθ) (lδθ)
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 22 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
𝛿𝑊′ = 𝛿𝑊inertia + 𝛿𝑊𝑐 + 𝛿𝑊𝑛𝑐
𝛿𝑊′ = −�ml�̈�� (lδθ) + �−(mg sinθ) (lδθ)� + 0
𝛿𝑊′ = −�ml�̈� + mg sinθ�(lδθ)
𝛿𝑊′ = 0; δθ(t): 𝑎𝑟𝑏𝑖𝑡𝑟𝑎𝑟𝑦
𝐦𝐥�̈� + 𝐦𝐠 𝐬𝐢𝐧𝛉 = 𝟎 Nonlinear equation
If θ is small, sinθ = θ
ml�̈� + mg θ = 0
l�̈� + g θ = 0
�̈� + 𝐠𝒍
𝛉 = 𝟎 Linear equation
5) Determine the natural frequency of a compound pendulum.
Solution:
Figure below shows a compound pendulum in the displaced position.
Let m = Mass of the rigid body
= 𝑤𝑔
l = Distance of point of suspension from G
O = Point of suspension
G = Centre of gravity
I = Moment of inertia of the body about O
= mk2 + ml2 = m(k2 + l2)
k = Radius of gyration of the body
If OG is displaced by an angle,
Restoring torque = -mglθ since θ is small sin θ ≈ θ
According to Newton’s second law
Accelerating torque = Restoring torque
i.e., 𝐼𝜃 ̈ = -mglθ
i.e, �̈�+ 𝑚𝑔𝑙𝐼 θ = 0
i.e, �̈�+ 𝑚𝑔𝑙𝑚(𝑘2+ 𝑙2
θ = 0
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 23 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
∴�̈�+ 𝑔𝑙(𝑘2+ 𝑙2
θ = 0
∴ 𝜔𝑛= � 𝑔𝑙𝑘2+𝑙2
𝑟𝑎𝑑/𝑠𝑒𝑐
Hence natural frequency 𝑓𝑛 = 12𝜋
𝜔𝑛 = 12𝜋� 𝑔𝑙𝑘2+𝑙2
𝐻𝑧.
6) Determine the natural frequency of a spring mass system where the mass of the spring is also
to be taken into account.
Solution: Figure shows a spring mass system If the mass of the spring is taken into account then, let x = Displacement of mass 𝑥 ̇ = Velocity of the free end of the spring at the instant under consideration. m' = Mass of spring wire per unit length l = Total length of the spring wire. Consider an elemental length dy at a distance ‘y’ measured from the fixed end. Velocity of the spring wire at the distance y from the fixed end = 𝑥 ̇ �𝑦
𝑙�
Kinetic energy of the spring element dy = 12
(𝑚′𝑑𝑦) ��̇� 𝑦𝑙�2
7) A block of mass 0.05 kg is suspended from a spring having a stiffness of 25 N/m.
The block is displaced downwards from its equilibrium position through a distance of 2 cm and released with an upward velocity of 3 cm/sec. Determine (i) Natural Frequency (ii) Period of Oscillation (iii) Maximum Velocity (iv) Maximum acceleration (v) Phase angle.
Data: m = 0.05 kg; k = 25 N/m; x(0) = x0 = 2 cm �̇�R0 = ν0 = 3cm/sec.
Solution:
The differential equation of the motion is given by
�̈� + 𝑘𝑚𝑥 = 0
The general solution for the above differential equation is,
x(t) = A cos ωn t + B sin ωn t = X cos (ωn t - φ)
When t = 0, x(0) = x0 = A = 2cm
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 24 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
∴ �̇� R(0) = ν0 = B ωn; ∴ B = 𝜗0𝜔𝑛
ωn = �𝑘𝑚
= � 250.05
= 22.36 𝑟𝑎𝑑/𝑠𝑒𝑐
Maximum amplitude of vibration X = √𝐴2 + 𝐵2 = �𝑥02 + 𝜗02
𝜔𝑛2
= �22 + 32
22.362 = 2.0045𝑐𝑚
i) Natural Frequency 𝑓𝑛 = 12𝜋
𝜔𝑛 = 12𝜋
× 22.36 = 3.56 𝐻𝑧
ii) Period of oscillation T = 1𝑓𝑛
= 13.56
= 0.28 sec.
iii) Maximum Velocity �̇� Rmax = X ωn = 2.0045 × 22.36 = 44.82 cm/sec.
iv) Maximum Acceleration �̈� Rmax = X 𝜔𝑛2 = �̇� Rmax .ωn = 44.82 × 22.36 = 1002.2 cm/sec2
v) Phase angle φ = tan-1 � 𝜗0𝜔𝑛𝑥0
� = 𝑡𝑎𝑛−1 � 322.36×2
� = 3.838𝑜
8) An oscillating system with a natural frequency of 3.98 Hz starts with an initial displacement of x0 = 10 mm and an initial velocity of �̇�R0 = 125 mm/sec. Calculate all the vibratory parameters involved and the time taken to reach the first peak.
Data: f = 3.98 Hz; x0 = 10 mm; �̇�R0 = ν0 = 125 mm/sec. Solution:
The differential equation of the motion is given by
�̈� + 𝑘𝑚𝑥 = 0
The general solution for the above differential equation is,
x(t) = A cos ωn t + B sin ωn t = X cos (ωn t - φ)
When t = 0, x(0) = x0 = A = 10 mm
∴ �̇� R(0) = ν0 = B ωn; ∴ B = 𝜗0𝜔𝑛
Frequency 𝑓 = 12𝜋𝜔𝑛
i.e, 3.98 = 12𝜋𝜔𝑛
∴ 𝜔𝑛 = 25 rad/sec
i) Maximum amplitude of vibration X = √𝐴2 + 𝐵2 = �𝑥02 + 𝜗02
𝜔𝑛2 = �102 + 1252
252 = 11.18 𝑚𝑚.
ii) Period of oscillation T = 1𝑓𝑛
= 13.98
= 0.251 𝑠𝑒𝑐.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 25 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
iii) Maximum Velocity �̇� Rmax = X ωn = 11.18 × 25 = 279.5 mm/sec
iv) Maximum Acceleration �̈� Rmax = X 𝜔𝑛2 = �̇� Rmax ωn = 279.5 × 25 = 6987.5 mm/sec
v) Phase angle φ = tan-1 � 𝜗0𝜔𝑛𝑥0
� = 𝑡𝑎𝑛−1 � 12525×10
� = 26.565𝑜
vi) Time taken to reach the first peak = 𝜋𝜔𝑛
=26.565× 𝜋180
25= 0.018546 𝑠𝑒𝑐.
vii) Lead angle Ψ = tan-1 (𝜔𝑛𝑥0𝜗0
= 𝑡𝑎𝑛−1 �25 ×10125
� = 1.107 𝑟𝑎𝑑𝑖𝑎𝑛 = 63.435𝑜
QUADRANT-3
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 26 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
Wikis
• en.wikipedia.org/wiki/Vibration
• wikis.controltheorypro.com/Single_Degree_of_Freedom,_Free_Undamp...
• Wikis.controltheorypro.com/Single_Degree_of_Freedom,_Free_Undamp...
• apmr.matelys.com/BasicsMechanics/SDOF/index.html
• www.structuralwiki.org › Home › Topics
• petrowiki.org/Basic_vibration_analysis
• vibrationdata.com/python-wiki/index.php?title=Runge-Kutta_ODE...
• en.wikipedia.org/wiki/Energy_functional
Open Contents:
• Mechanical Vibrations, S. S. Rao, Pearson Education Inc, 4th edition, 2003. • Mechanical Vibrations, V. P. Singh, Dhanpat Rai & Company, 3rd edition, 2006. • Mechanical Vibrations, G. K.Grover, Nem Chand and Bros, 6th edition, 1996 • Theory of vibration with applications ,W.T.Thomson,M.D.Dahleh and C
Padmanabhan,Pearson Education inc,5th Edition ,2008 • Theory and practice of Mechanical Vibration : J.S.Rao&K,Gupta,New Age International
Publications ,New Delhi,2001
QUADRANT-4 Problems
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 27 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
1. An instrument panel of natural period 0.1 second, is excited by a step function 0.5 cm
magnitude for a period of 0.075 second. Determine the response of the system.
Solution:
Natural frequency = 10.1
= 10 𝐻𝑧
Also fn = 12𝜋𝜔𝑛
i.e, 10 = 12𝜋𝜔𝑛
∴ 𝜔𝑛 = 20𝜋 𝑟𝑎𝑑𝑖𝑎𝑛/ sec = 62.832 𝑟𝑎𝑑𝑠𝑒𝑐
.
With the reference to translated equilibrium position for the first part,
x(t) = X cos ωn t; ∴ x(0) = 0.5 = X
�̇� R(t) = ν0 = 0; ∴ x(t) = 0.5 cos 62.832 t
With reference to the original mean equilibrium position of the mass
x = x(t) - x(0) = 0.5 cos 62.832t – 0.5
= 0.5[cos 62.832t-1]
∴ �̇� = (0.5×62.832)(-sin 62.832t)
i.e., �̇�62.832
= −0.5 sin 62.832𝑡
i.e., �̇�𝜔𝑛
= −0.5 sin 62.832𝑡
At the end of first part, t = 0.075 sec
∴ x(0.075) = 0.5 [cos (20π × 0.075) – 1] = -0.5 cm
�̇�0.075𝜔𝑛
= -0.5 sin (20π × 0.075) = 0.5 cm = 𝜗0.075𝜔𝑛
∴ For the second part with t’ as time,
x = A cos + 𝐵 sin𝜔𝑛𝑡′
= X cos (𝜔𝑛𝑡′- φ)
X = √𝐴2 + 𝐵2 = �𝑥(0.075)2 + �𝜗0.075
𝜔𝑛� = �(−0.5)2 + 0.52 = 0.7071
φ = tan-1 �𝜗0.075𝜔𝑛
𝑥0.075� = 𝑡𝑎𝑛−1 �−0.5
0.5� = 0.7854 𝑟𝑎𝑑 = 2.3562 𝑟𝑎𝑑𝑖𝑎𝑛
∴ x = 0.7071 cos (62.832t’ – 2.3562) cm.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 28 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
2. The solution to the differential for single degree freedom motion is given by x =
X cos (100t + φ) with initial condition �̇�R(0) = 1250mm/sec and x(0) = 0.25 mm find the
values of X and φ, and express the given equation in the form x = A
sin ωn t + B cos ωn t.
Data: �̇�R0 = ν0 = 1250 mm/sec; x(0) = x0 = 0.25 mm
Solution:
Given equation x = X cos (100t + φ) = X cos (ωn t + φ)
∴ωn = 100rad/sec
Also x(t) = A sin ωn t + B cos ωn t
∴ x(t) = x0 = 0 + B
∴ B = x0 = 0.25 mm
�̇� R(t) = A ωn cos ωn t - B ωn sin ωn t
∴ �̇� R(0) = ν0 = A ωn
i.e., 1250 = 100 A
∴ A = 12.5 mm
Maximum amplitude X = √𝐴2 + 𝐵2 = ��𝜗02
𝜔𝑛2� + 𝑥02
= √12.52 + 0.252 = 12.5025 𝑚𝑚.
Now X cos (ωn t + φ) = A sin ωn t + B cos ωn t (given)
i.e., X cos ωn t.cosφ - X sin ωn t sinφ = A sin ωn t + B cos ωn t
∴A = -X sin φ; B = X cos φ
∴ tan φ = -𝐴𝐵
∴ Phase angle φ = tan-1 �− 𝐴𝐵� = 𝑡𝑎𝑛−1 �
−𝜗0𝜔𝑛𝑥0� = 𝑡𝑎𝑛−1 �−12.5
0.25� = −1.55 𝑟𝑎𝑑𝑖𝑎𝑛
= 1.5908 radian = 91.146o
Hence the given equation is,
x = 12.5 sin 100t + 0.25 cos 100t
= 12.5025 cos (100t + 1.5908) = 12.5025 cos (100t + 91.146o).
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 29 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
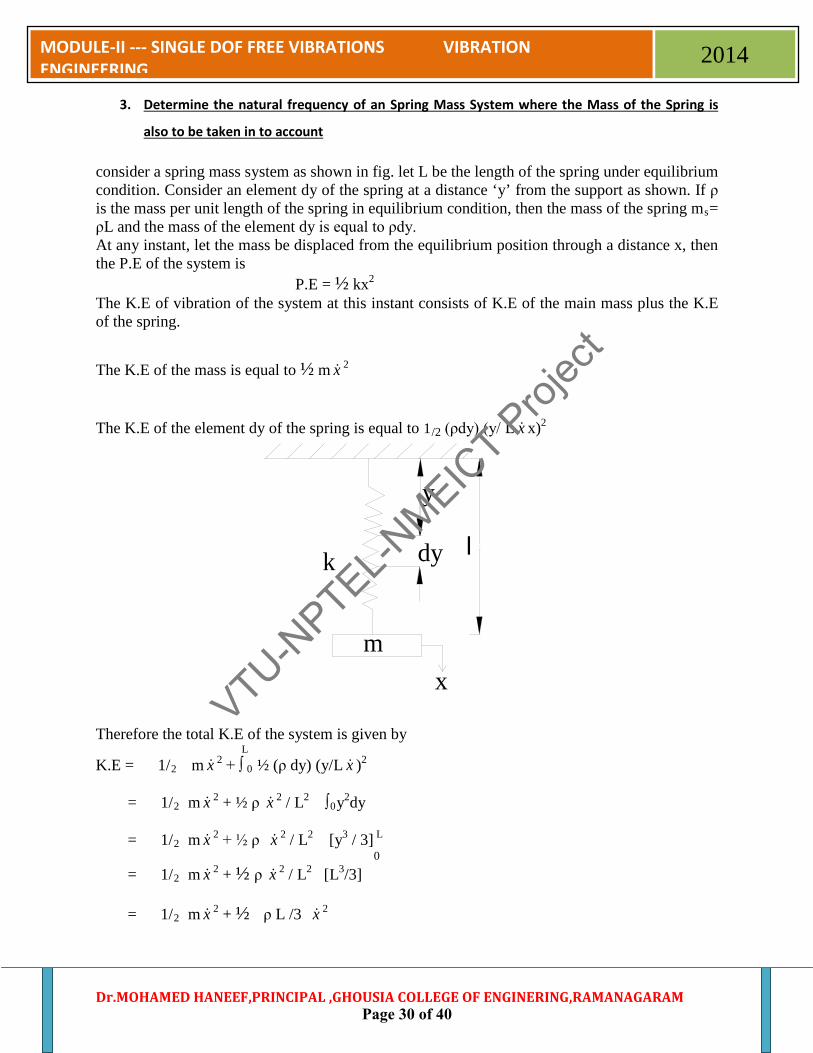
3. Determine the natural frequency of an Spring Mass System where the Mass of the Spring is
also to be taken in to account
consider a spring mass system as shown in fig. let L be the length of the spring under equilibrium condition. Consider an element dy of the spring at a distance ‘y’ from the support as shown. If ρ is the mass per unit length of the spring in equilibrium condition, then the mass of the spring ms= ρL and the mass of the element dy is equal to ρdy. At any instant, let the mass be displaced from the equilibrium position through a distance x, then the P.E of the system is P.E = ½ kx2 The K.E of vibration of the system at this instant consists of K.E of the main mass plus the K.E of the spring. The K.E of the mass is equal to ½ m x 2
The K.E of the element dy of the spring is equal to 1/2 (ρdy) (y/ L x x)2
x
dy
y
lk
m
Therefore the total K.E of the system is given by L K.E = 1/2 m x 2 + ∫ 0 ½ (ρ dy) (y/L x )2 = 1/2 m x 2 + ½ ρ x 2 / L2 ∫0y2dy = 1/2 m x 2 + ½ ρ x 2 / L2 [y3 / 3] L 0 = 1/2 m x 2 + ½ ρ x 2 / L2 [L3/3] = 1/2 m x 2 + ½ ρ L /3 x 2
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 30 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
= 1/2 m x 2 + ½ ms /3 x 2 K.E = 1/2 x 2 [m + ms /3] We have by energy method P.E + K.E = Constant
1/2 kx2 +1/2 x 2 [m + ms / 3 ] = Constant Differentiating the above equation ½ k (2x) ( x ) + ½ (2 x ) ( x ) [m + ms /3] = 0 kx + (m + ms/3) x = 0 Or (m + ms /3) x + kx = 0 f n = 1/2π √ k / (m + ms /3) ωn = √k / (m + ms /3) Hence the above equation shows that for finding the natural frequency of the system, the mass of the spring can be taken into account by adding one – third its mass to the main mass.
4) Explain a) Energy method b) Rayliegh Ritz method of finding Natural Frquency.
Ans)
c) Energy Method:
Consider a spring mass system as shown in fig: 2.2 (a),
assume the system to be conservative. In a conservative
system the total sum of the energy is constant in a vibrating
system the energy is partly potential and partly kinetic. The
K.E, T is because of velocity of the mass and Potential energy
V is stored in the spring because of its elastic deformation
As per conservation law of energy.
Fig:2.2 (c)
T + V = constant
Differentiating the above equation w.r.t. ‘t’
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 31 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
𝑑𝑑𝑡
(𝑇 + 𝑉) = 0
For a spring mass system shown
𝐾.𝐸 = 𝑇 = ½ 𝑚�̇�2
𝑃.𝐸 = 𝑉 = ½ 𝑘𝑥2 𝒅𝒅𝒕
(½ 𝑚�̇�2 + ½ 𝑘𝑥2) = 0
𝒅𝒅𝒕
( 𝑚�̇�2 + 𝑘𝑥2) = 0
𝑚 x x + 𝑘𝑥 x = 0
�̈� + (𝑘/𝑚) 𝑥 = 0
Hence the natural frequency is
𝜔𝑛 = � 𝑘/𝑚 ƒ𝑛 = 1 /2𝜋 �𝑘/𝑚 = 1/ 2𝜋 �𝑔 / 𝛿
d) Rayleigh’s Method:
Consider the spring mass system as shown. In deriving the
expression, it is assumed that the maximum K.E at mean
position is equal to the maximum P.E at the extreme position.
The motion is assumed to be SH
Then 𝑥 = 𝐴 𝑠𝑖𝑛 𝜔𝑛 𝑡
X= displacement of the body from mean position after time‘t’
A = Maximum. displacement from mean position to extreme
position.
Differentiating w. r. t
�̇� = 𝐴𝜔𝑛 𝑐𝑜𝑠 𝜔𝑛 𝑡
Fig:2.2 (b)
Maximum Velocity at mean position �̇� = 𝜔𝑛 𝐴
Maximum kinetic energy at mean position = 1 2� (𝑚�̇�2)
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 32 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
= 1 2� (𝑚𝜔𝑛2𝐴2)
And maximum potential energy at Extreme position
𝑃.𝐸 = 12� (𝑘𝐴2)
W.K.T, K.E = P.E
= 1 2� (𝑚𝜔𝑛2𝐴2)P
= 1 2� (𝑘𝐴2)
𝜔𝑛2 = (𝑘/𝑚)
𝜔𝑛 = �(𝑘/𝑚)
Hence the natural frequency is
ƒ𝑛 = 1 /2𝜋 �𝑘/𝑚 = 1/ 2𝜋 �𝑔 / 𝛿
1. Eriefly Explain different models of damping.
Ans) Different Models of Damping
Damping is associated with energy dissipation. There are several types of damping. Four of
which are important types which are discussed here.
9) Viscous damping
10) Coulomb damping
11) Structural damping or solid damping
12) Slip or Interfacial damping
Viscous Damping: Viscous damping is encountered by bodies moving at moderate speed
through a liquid. This type of damping leads to a resisting force proportional to the velocity. The
damping force.
𝐹𝑑 𝛼 𝑑𝑥𝑑𝑡
𝐹𝑑 = 𝑐�̇�
When ‘c’ is the constant of proportionality and is called viscous damping Co-efficient with the
dimension of N-s/m.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 33 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
Coulomb Damping: - This type of damping arises from sliding of dry surfaces. The friction
force is nearly constant and depends upon the nature of sliding surface and normal pressure
between them as expressed by the equation of kinetic friction.
F = µ N
When µ = co- efficient of friction
N = normal force
6) Explian the principle of Virtual Work.And derive an expression for equation of Motion for a
spring Mass System and Simple Pendulam.
Ans)
Draw the system in the displaced position x and place the forces acting on it, including
inertia and gravity forces. Give the system a small virtual displacement δ x and determine the
work done by each force. Using the fact that virtual work done by external forces equals virtual
work done by inertia forces, we then obtain the equation of motion for the system.
δW = m. �̈�. δx
The virtual work done by inertia forces is
δW = −kx. δx
Equating the two quantities above and canceling δ x, we have the equation of motion
m. �̈� + kx = 0
Example: Simple Pendulum
Use the virtual work method; determine the equation of motion for the system below.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 34 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
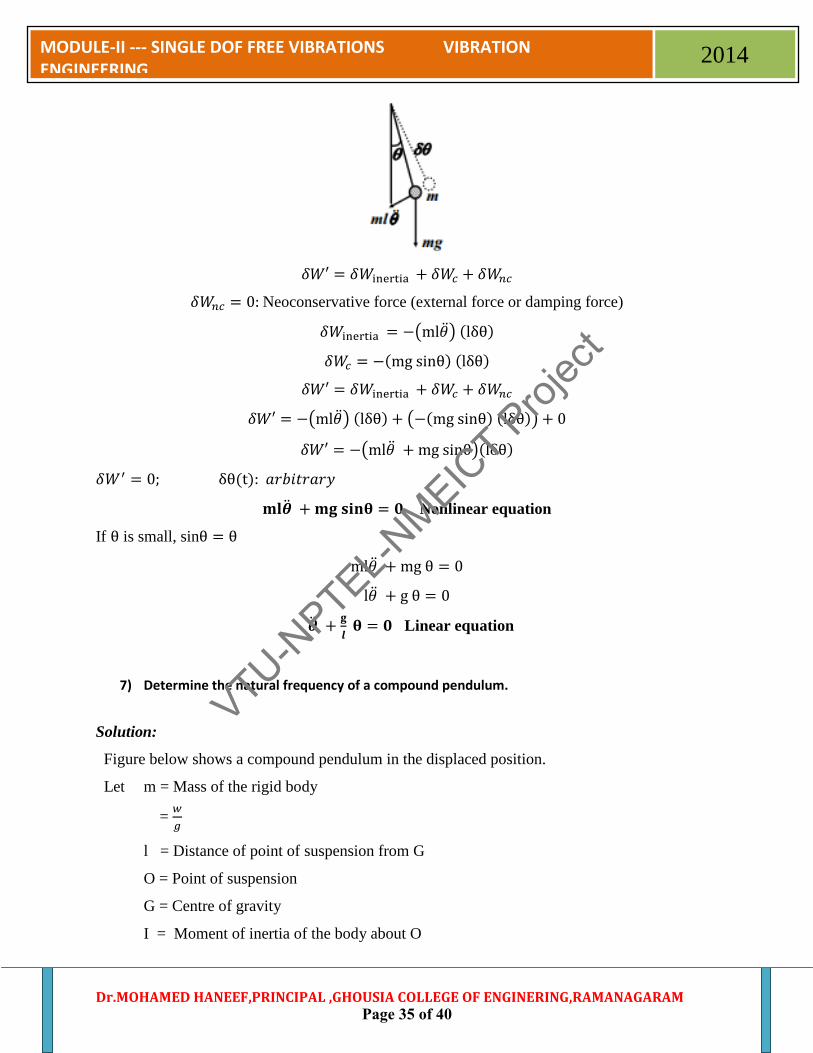
𝛿𝑊′ = 𝛿𝑊inertia + 𝛿𝑊𝑐 + 𝛿𝑊𝑛𝑐
𝛿𝑊𝑛𝑐 = 0: Neoconservative force (external force or damping force)
𝛿𝑊inertia = −�ml�̈�� (lδθ)
𝛿𝑊𝑐 = −(mg sinθ) (lδθ)
𝛿𝑊′ = 𝛿𝑊inertia + 𝛿𝑊𝑐 + 𝛿𝑊𝑛𝑐
𝛿𝑊′ = −�ml�̈�� (lδθ) + �−(mg sinθ) (lδθ)� + 0
𝛿𝑊′ = −�ml�̈� + mg sinθ�(lδθ)
𝛿𝑊′ = 0; δθ(t): 𝑎𝑟𝑏𝑖𝑡𝑟𝑎𝑟𝑦
𝐦𝐥�̈� + 𝐦𝐠 𝐬𝐢𝐧𝛉 = 𝟎 Nonlinear equation
If θ is small, sinθ = θ
ml�̈� + mg θ = 0
l�̈� + g θ = 0
�̈� + 𝐠𝒍
𝛉 = 𝟎 Linear equation
7) Determine the natural frequency of a compound pendulum.
Solution:
Figure below shows a compound pendulum in the displaced position.
Let m = Mass of the rigid body
= 𝑤𝑔
l = Distance of point of suspension from G
O = Point of suspension
G = Centre of gravity
I = Moment of inertia of the body about O
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 35 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
= mk2 + ml2 = m(k2 + l2)
k = Radius of gyration of the body
If OG is displaced by an angle,
Restoring torque = -mglθ since θ is small sin θ ≈ θ
According to Newton’s second law
Accelerating torque = Restoring torque
i.e., 𝐼𝜃 ̈ = -mglθ
i.e, �̈�+ 𝑚𝑔𝑙𝐼 θ = 0
i.e, �̈�+ 𝑚𝑔𝑙𝑚(𝑘2+ 𝑙2
θ = 0
∴�̈�+ 𝑔𝑙(𝑘2+ 𝑙2
θ = 0
∴ 𝜔𝑛= � 𝑔𝑙𝑘2+𝑙2
𝑟𝑎𝑑/𝑠𝑒𝑐
Hence natural frequency 𝑓𝑛 = 12𝜋
𝜔𝑛 = 12𝜋� 𝑔𝑙𝑘2+𝑙2
𝐻𝑧.
8) Determine the natural frequency of a spring mass system where the mass of the spring is also
to be taken into account.
Solution: Figure shows a spring mass system If the mass of the spring is taken into account then, let x = Displacement of mass 𝑥 ̇ = Velocity of the free end of the spring at the instant under consideration. m' = Mass of spring wire per unit length l = Total length of the spring wire. Consider an elemental length dy at a distance ‘y’ measured from the fixed end. Velocity of the spring wire at the distance y from the fixed end = 𝑥 ̇ �𝑦
𝑙�
Kinetic energy of the spring element dy = 12
(𝑚′𝑑𝑦) ��̇� 𝑦𝑙�2
9) A block of mass 0.05 kg is suspended from a spring having a stiffness of 25 N/m.
The block is displaced downwards from its equilibrium position through a distance of 2 cm and released with an upward velocity of 3 cm/sec. Determine
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 36 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
(i) Natural Frequency (ii) Period of Oscillation (iii) Maximum Velocity (iv) Maximum acceleration (v) Phase angle.
Data: m = 0.05 kg; k = 25 N/m; x(0) = x0 = 2 cm �̇�R0 = ν0 = 3cm/sec.
Solution:
The differential equation of the motion is given by
�̈� + 𝑘𝑚𝑥 = 0
The general solution for the above differential equation is,
x(t) = A cos ωn t + B sin ωn t = X cos (ωn t - φ)
When t = 0, x(0) = x0 = A = 2cm
∴ �̇� R(0) = ν0 = B ωn; ∴ B = 𝜗0𝜔𝑛
ωn = �𝑘𝑚
= � 250.05
= 22.36 𝑟𝑎𝑑/𝑠𝑒𝑐
Maximum amplitude of vibration X = √𝐴2 + 𝐵2 = �𝑥02 + 𝜗02
𝜔𝑛2
= �22 + 32
22.362 = 2.0045𝑐𝑚
vi) Natural Frequency 𝑓𝑛 = 12𝜋
𝜔𝑛 = 12𝜋
× 22.36 = 3.56 𝐻𝑧
vii) Period of oscillation T = 1𝑓𝑛
= 13.56
= 0.28 sec.
viii) Maximum Velocity �̇� Rmax = X ωn = 2.0045 × 22.36 = 44.82 cm/sec.
ix) Maximum Acceleration �̈� Rmax = X 𝜔𝑛2 = �̇� Rmax .ωn = 44.82 × 22.36 = 1002.2 cm/sec2
x) Phase angle φ = tan-1 � 𝜗0𝜔𝑛𝑥0
� = 𝑡𝑎𝑛−1 � 322.36×2
� = 3.838𝑜
Assignment 1. An unknown mass m kg attached to the end of an unknown spring K has a natural frequency of
94 HZ, When a 0.453 kg mass is added to m, the natural frequency is lowered to 76.7 HZ.
Determine the unknown mass m and the spring constant K N/m.
2. An unknown mass is attached to one end of a spring of shiftness K having natural frequency of 6
Hz. When 1kg mass is attached with m the natural frequency of the system is lowered by 20%.
Determine the value of the unknown mass m and stiffness K.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 37 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
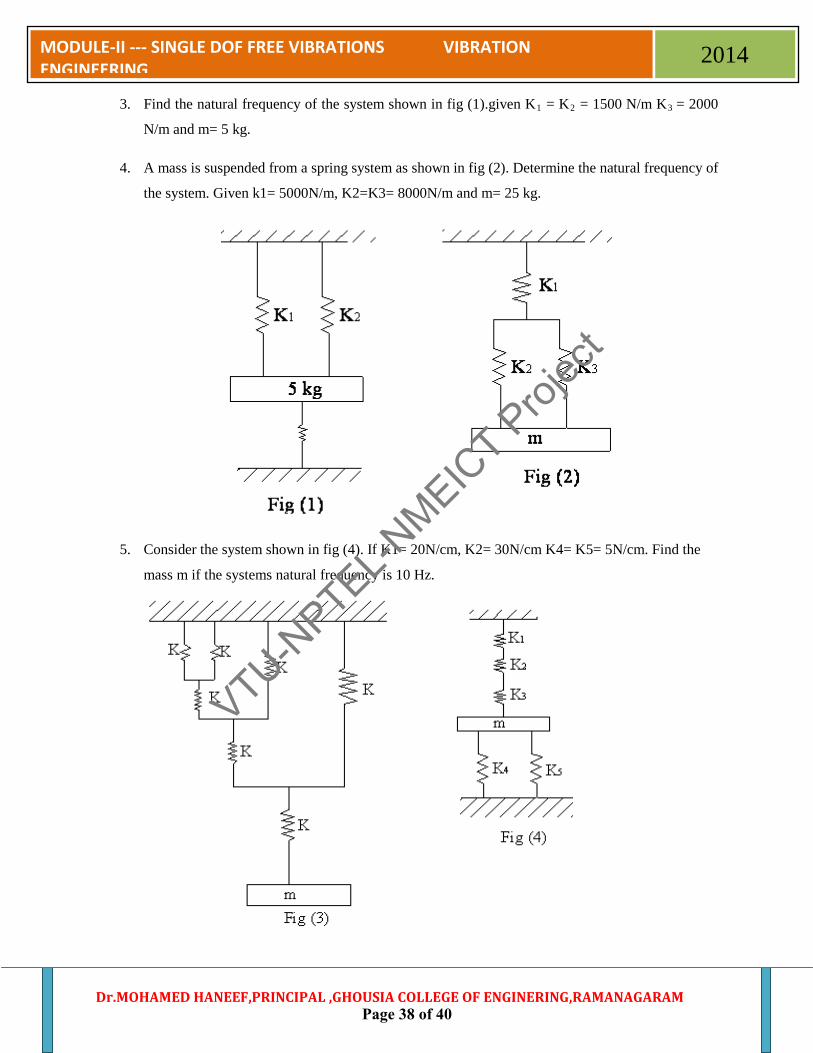
3. Find the natural frequency of the system shown in fig (1).given K1 = K2 = 1500 N/m K3 = 2000
N/m and m= 5 kg.
4. A mass is suspended from a spring system as shown in fig (2). Determine the natural frequency of
the system. Given k1= 5000N/m, K2=K3= 8000N/m and m= 25 kg.
5. Consider the system shown in fig (4). If K1= 20N/cm, K2= 30N/cm K4= K5= 5N/cm. Find the
mass m if the systems natural frequency is 10 Hz.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 38 of 40
MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
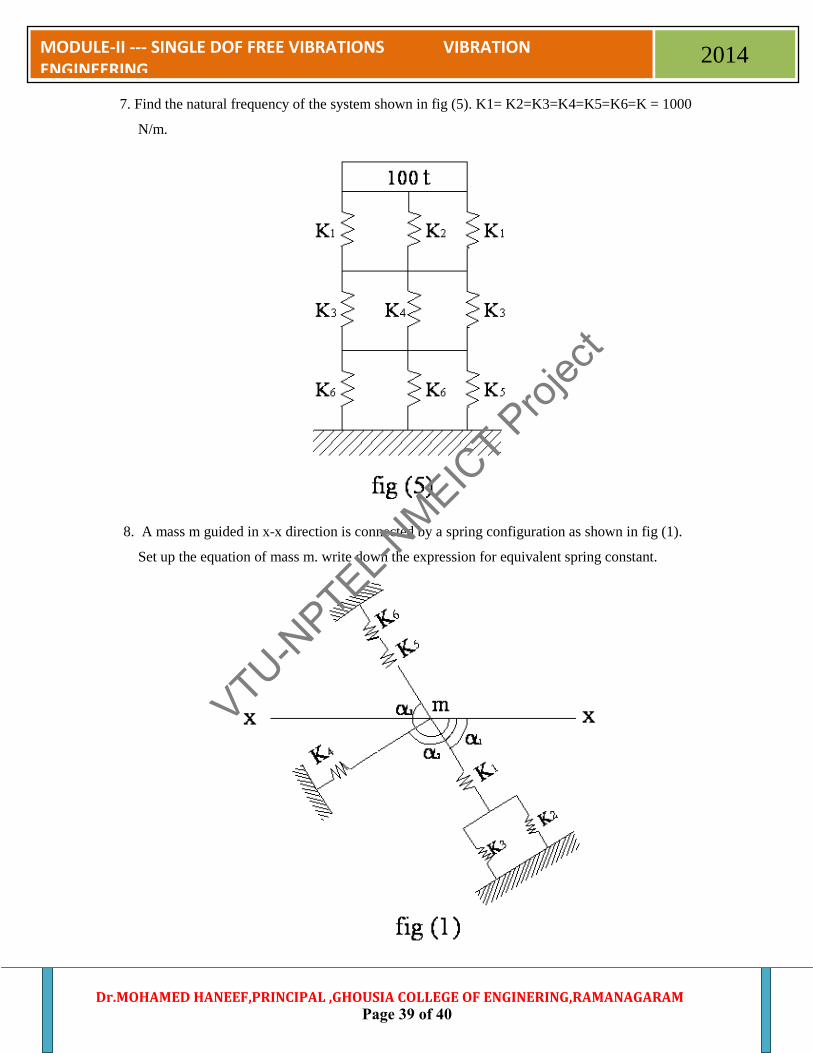
7. Find the natural frequency of the system shown in fig (5). K1= K2=K3=K4=K5=K6=K = 1000
N/m.
8. A mass m guided in x-x direction is connected by a spring configuration as shown in fig (1).
Set up the equation of mass m. write down the expression for equivalent spring constant.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 39 of 40

MODULE-II --- SINGLE DOF FREE VIBRATIONS VIBRATION ENGINEERING
2014
9. Find the equivalent spring constant of the system shown in fig (2) in the direction of the load P.
10. Determine the natural frequency of spring mass system taking the mass of the spring in to
account.
11. Drive the differential equation for an undamped spring mass system using Newton’s method.
12. Derive the equation of motion of a simple pendulum having an angular displacement of
𝜃.
13. Show that the frequency of undamped free vibration of a spring mass system is given
by 𝐹𝑛 = 1/ 2𝜋 �𝑔 𝛿
.
14. Show that the natural frequency of undamped free vibration of a spring mass system is
given by 𝜔𝑛 = 1/ 2𝜋 �𝑘 𝐽
.
15. Using the energy method derive the differential equation of motion of an undamped free
vibration and show that frequency 𝜔𝑛 = �𝑘 𝑚
16. Using the Rayleigh method derive the differential equation of motion of an undamped
free vibration and show that frequency 𝜔𝑛 = �𝑘 𝑚
17. Derive the natural frequency of torsional vibrations.
Dr.MOHAMED HANEEF,PRINCIPAL ,GHOUSIA COLLEGE OF ENGINERING,RAMANAGARAM
VTU-NPTEL-N
MEICT Proj
ect
Page 40 of 40